Признаки положительности функции Коши дифференциального
advertisement

Известия вузов. Математика
2010, № 11, c. 50–62
http://www.ksu.ru/journals/izv_vuz/
Гос. номер статьи по НТЦ "Информрегистр" 0421000123 \0103
Т.Л. САБАТУЛИНА
ПРИЗНАКИ ПОЛОЖИТЕЛЬНОСТИ ФУНКЦИИ КОШИ
ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ
С РАСПРЕДЕЛЕННЫМ ЗАПАЗДЫВАНИЕМ
Аннотация. Получены неулучшаемые достаточные признаки положительности функции Коши дифференциального уравнения с распределенным запаздыванием. На основе этих признаков исследованы некоторые асимптотические свойства решений уравнения Хатчинсона–
Райта, уравнения Lasota–Wazevska и уравнения Nicholson’а.
Ключевые слова: функционально-дифференциальное уравнение, положительность функции
Коши, уравнение Хатчинсона–Райта, уравнение Lasota–Wazevska, уравнение Nicholson’а.
УДК: 517.929
Abstract. We obtain unimprovable sufficient conditions for the positivity of the Cauchy function for
differential equation with distributed delay. Based on these conditions, we study some asymptotic
properties of solutions of the Hutchinson–Wright equation, the Lasota–Wazevska equation, and
the Nicholson equation.
Keywords: functional-differential equation, positivity of the Cauchy function, Hutchinson–Wright
equation, Lasota–Wazevska equation, Nicholson equation.
Пусть R = (−∞, +∞), R+ = [0, +∞), ∆ = {(t, s) ∈ R2+ : t s}, ∆l = {(t, s) ∈ [0, l] × [0, l] :
t s}. Через L1 будем обозначать пространство суммируемых на R+ функций таких, что
∞
∞
|x(t)|dt < ∞, с нормой x = |x(t)| dt.
0
0
Рассмотрим дифференциальное уравнение с распределенным переменным запаздыванием
t−τ (t)
k(t, s)x(s)ds = f (t), t ∈ R+ ,
(1)
(Lx)(t) = ẋ(t) + a(t)x(t) +
t−τ (t)−h(t)
где k :
R2+
→ R+ , τ : R+ → R+ , h : R+ → (0, +∞), a : R+ → R+ , функции k(t, ·), a и f локальt−τ
(t)
k(t, s) ds
но суммируемы, функции k(·, s), τ , h измеримы по Лебегу, функция ρ(t) =
t−τ (t)−h(t)
локально суммируема. Решение уравнения (1) принято считать ([1], с. 9) принадлежащим
классу абсолютно непрерывных на каждом отрезке функций. Здесь и далее будем предполагать, что при отрицательных значениях аргумента функция x равна нулю. В дальнейшем
если пределы интегрирования становятся отрицательными в некоторых точках, то подинтегральную функцию будем полагать равной нулю при отрицательных значениях аргумента.
Поступила 02.04.2009
50
ПРИЗНАКИ ПОЛОЖИТЕЛЬНОСТИ ФУНКЦИИ КОШИ
51
Как известно ([1], с. 84, теорема 1.1), решение уравнения (1) при любом заданном начальном условии x(0) и любой правой части f существует, единственно и представимо в
виде
t
C(t, s)f (s)ds.
(2)
x(t) = X(t)x(0) +
0
Функцию C(t, s) называют функцией Коши уравнения (1), а функцию X(t) = C(t, 0) —
фундаментальным решением уравнения (1). Функция Коши является решением однородного уравнения ([2], с. 96–97)
t−τ (t)
∂
k(t, ξ)C(ξ, s) dξ, t s 0,
(3)
C(t, s) = −a(t)C(t, s) −
∂t
t−τ (t)−h(t)
с начальным условием C(s, s) = 1. При η < s полагаем C(η, s) = 0.
Формула (2) позволяет свести вопросы о знакоопределенности и монотонности решения
уравнения (1) к вопросу о положительности функции Коши уравнения (1).
Одним из наиболее известных эффективных методов получения признаков положительности функции Коши является так называемая теорема о дифференциальном неравенстве.
Приведем ее здесь в удобной для нас форме в предположениях о параметрах уравнения (1),
перечисленных выше. Эта теорема потребуется нам в двух вариантах: для полуоси и для
конечного отрезка.
Теорема 1 ([2], с. 65–66, лемма 2.4.3; [3], теорема 1). Если существует такая абсолютно
непрерывная на R+ (на отрезке [0, l]) функция v, что v(t) > 0 при всех t ∈ R+ (t ∈ [0, l]), а
(Lv)(t) 0 при почти всех t ∈ R+ (t ∈ [0, l]), то C(t, s) > 0 при всех (t, s) ∈ ∆ ((t, s) ∈ ∆l ).
Отметим, что в большинстве работ, посвященных исследованию линейных функционально-дифференциальных уравнений, рассматривались уравнения с сосредоточенным запаздыванием, для которых и были получены эффективные признаки знакоопределенности
(неосцилляции) решения (см. [2]; [4], § 31; [5]–[10]). Работ, где изучались уравнения с распределенным запаздыванием, значительно меньше. Как правило, результаты для таких
уравнений получают как следствия из теорем для уравнений более общего вида (см. [6],
[11]–[13]). Поэтому эти признаки часто далеки от точных.
В данной работе, являющейся логическим продолжением работ [14]–[16], уравнение с
распределенным запаздыванием является основным объектом изучения. Цель исследования — получение точных эффективных признаков положительности функции Коши уравнения (1).
1. Признаки положительности функции Коши
Изучим сначала частный случай уравнения (1) при a(t) ≡ 0:
t−τ (t)
k(t, s)x(s) ds = f (t),
(Lx)(t) ≡ ẋ(t) +
t−τ (t)−h(t)
t ∈ R+ .
(4)
Из условий на параметры уравнения (1) следует ρ(t) 0. Исключая тривиальный случай
ρ(t) ≡ 0, будем предполагать, что ρ(t) > 0, начиная с некоторого T . Рассмотрим функцию
t
ϕ(t) = ρ(s) ds, которая является монотонной, а по теореме об абсолютной непрерывности
T
интеграла — непрерывной. Значит, на множестве значений функции ϕ существует однозначная обратная функция ϕ−1 .
52
Т.Л. САБАТУЛИНА
Уточним вопрос о множестве значений функции ϕ. Заметим, что здесь существенно различаются случаи сходящегося и расходящегося интегралов от функции ρ.
∞
Если ρ(s) ds = ∞, то функция ϕ осуществляет взаимно-однозначное отображение мноT
жества [T, +∞) на R+ . При этом ϕ(T ) = 0 и lim ϕ(t) = +∞.
t→+∞
∞
Если ρ(s) ds = l < ∞, то функция ϕ осуществляет взаимно-однозначное отображение
T
множества [T, +∞) на полуинтервал [0, l). При этом ϕ(T ) = 0 и lim ϕ(t) = l.
t→+∞
Сделаем в уравнении (4) замену переменных t = ϕ−1 (u), s = ϕ−1 (v):
u−T (u)
K(u, v)x(v) dv = f (u), u ∈ R+ .
(Ly)(u) ≡ ẏ(u) +
u−T (u)−H(u)
(5)
Функция Коши Y уравнения (5) связана с функцией Коши C уравнения (4) равенством
Y (u, v) = C(ϕ(u), ϕ(v)) и является решением уравнения
u−T (u)
∂
Y (u, v) = −
K(u, ξ)Y (ξ, v) dξ,
(6)
∂u
u−T (u)−H(u)
где
ϕ−1
(u)
−1
ϕ−1 (u)−τ
(ϕ (u))
ρ(v) dv, H(u) =
T (u) =
ϕ−1 (u)−τ (ϕ−1 (u))
ρ(v) dv,
ϕ−1 (u)−τ (ϕ−1 (u))−h(ϕ−1 (u))
K(u, v) =
k(ϕ−1 (u), ϕ−1 (v))
.
ρ(ϕ−1 (u))ρ(ϕ−1 (v))
Ядро уравнения (6) обладает свойством
u−T (u)
K(u, v) dv = 1.
u−T (u)−H(u)
Лемма. Пусть в уравнении (6) u ∈ [0, l). Тогда
а) sup |Y (u, v)| < ∞;
(u,v)∈∆l
б) для любого ε > 0 найдется θ ∈ (0, l) такое, что при всех u, v, θ v u < l,
справедливо неравенство |Y (u, v) − 1| ε;
в) при любом фиксированном v существует lim Y (u, v).
u→l
Доказательство. Из оценки
u s−T (s)
|Y (u, v)| e
v
s−T (s)−H(s)
K(s,ζ) dζds
= eu−v el
функции Коши ([2], с. 98, свойство 2) следует а).
Проинтегрируем уравнение (6) по первому аргументу на отрезке [u1 , u2 ] и оценим разность
u2 ζ−T (ζ)
K(ζ, ξ)|Y (ξ, v)| dξ dζ el (u2 − u1 ).
(7)
|Y (u2 , v) − Y (u1 , v)| u1
ζ−T (ζ)−H(ζ)
Значит, для фиксированного v семейство {Y (u, v)} при u → l фундаментально, следовательно, в силу полноты R существует lim Y (u, v), т. е. п. в) доказан.
u→l
ПРИЗНАКИ ПОЛОЖИТЕЛЬНОСТИ ФУНКЦИИ КОШИ
53
Для доказательства б) ∀ε > 0 найдем такое θ ∈ (0, l), что справедливо l−θ < εe−l . Полагая
в неравенстве (7) u1 = v, u2 = u, получаем, что для всех v θ выполнено |Y (u, v) − 1| el (l − v) < εel e−l = ε.
Учитывая, что u → l тогда и только тогда, когда t → ∞, с помощью леммы получаем
следующую теорему.
Теорема 2. Пусть ρ ∈ L1 . Тогда
а) sup |C(t, s)| < ∞;
(t,s)∈∆
б) для любого ε > 0 найдется θ > 0 такое, что при всех t, s : θ s t, справедливо
неравенство |C(t, s) − 1| ε;
в) при любом фиксированном s существует lim C(t, s).
t→∞
Установим некоторые признаки положительности функции Коши уравнения (4).
Теорема 3. Функция Коши уравнения (4) положительна, если
t
1
vrai sup
ρ(s) ds .
e
t
t−τ (t)−h(t)
(8)
Доказательство. Пусть ρ ∈
/ L1 . Применим теорему 1 (случай полуоси) к уравнению (5),
взяв v(u) = e−eu . Неравенство (8) принимает вид vrai sup(T (u) + H(u)) 1e . Найдем
(Lv)(u) = −ee−eu +
u−T
(u)
u−T (u)−H(u)
u
K(u, w)e−ew dw −e−eu e − ee(T (u)+H(u)) 0. Тогда
Y (u, w) > 0 при всех (u, w) ∈ ∆. Значит, C(t, s) > 0 при всех (t, s) ∈ ∆.
Случай ρ ∈ L1 доказывается по той же схеме, только уравнение (6) рассматривается на
конечном отрезке и к нему нужно применить второй вариант теоремы 1.
Следующий пример показывает, что константу
1
e
в оценке (8) нельзя увеличить.
Пример. Пусть в уравнении (4) k(t, s) = kn, τ (t) = 1, h(t) = n1 , x(0) = 1, где k — положительное действительное, а n — натуральное числа. Перепишем семейство таких уравнений
в виде
ẋn (t) + kxn (t − 1) = kxn (t − 1) − kn
t−1
1
t−1− n
xn (s) ds.
С помощью формулы (2) последнему равенству можно придать эквивалентную интегральную форму
t
s−1
X(t − s)
(xn (s − 1) − xn (ξ)) dξ ds,
(9)
xn (t) = X(t) + kn
0
1
s−1− n
где X(t) — фундаментальное решение уравнения с сосредоточенным запаздыванием
ẋ(t) + kx(t − 1) = 0.
(10)
и меняет знак при k > 1e .
t
ρ(s) ds =
Пусть k > 1e . Тогда для исследуемого семейства уравнений (4) vrai sup
t
t−τ (t)−h(t)
k 1 + n1 > 1e при любом n, т. е. неравенство (8) не выполнено. Рассмотрим точку t0 , находящуюся в малой окрестности первого нуля функции X, причем X(t0 ) < 0, т. е. X(t)
монотонно убывает на отрезке [0, t0 ] и меняет знак в одной точке из данного отрезка.
Известно ([2], с. 66–67), что функция X положительна при k 1
e
54
Т.Л. САБАТУЛИНА
Так как интеграл
t0
0
|X(s)| ds = M не зависит от n, то по теореме Кантора о равномерной
непрерывности для ε ∈ (0, |X(t0 )|) найдется такое n, что при |t2 − t1 | < 1/n выполняется
ε
. Из уравнения (9) получаем
|xn (t2 ) − xn (t1 )| < kM
t0
t0
ε
ε
|X(t0 ) − xn (t0 )| < k
|X(t0 − s)| ds =
|X(s) |ds = ε,
kM 0
M 0
т. е. при достаточно больших n решение уравнения (4) будет отличаться от решения уравнения (10) в точке t0 не больше, чем на ε. Значит, в силу выбора ε решение уравнения (4)
меняет знак. Следовательно, функция Коши уравнения (4) также меняет знак, а так как
величину k(1 + 1/n) можно сделать сколь угодно близкой к 1e , то константу 1e в неравенстве
(8) нельзя увеличить.
Подчеркнем, что построенный пример доказывает точность постоянной 1e на классе всех
ядер k(t, s), которые могут принимать сколь угодно большие значения. Если же рассматриваются уравнения, ядра которых имеют общую оценку, то постоянную 1e можно увеличить.
Введем функцию α = φ(β), заданную параметрически равенствами
−ξ )
ξ 2 e−2+ξ/(1−e
1
2
,
β
=
α= −
ξ 1 − e−ξ
eξ − 1
где ξ0 — положительный корень уравнения
ξ
e−ξ = 1 − .
2
,
ξ ξ0 ,
(11)
Теорема 4 ([16]). Пусть sup k(t, s) = k, sup τ (t) = τ , sup h(t) = h и
t,s
t
t
функция Коши уравнения (4) положительна.
τ
h
φ kh2 . Тогда
В случае τ = 0 из теоремы 4 легко получить
Следствие 1 ([16]). Пусть τ = 0. Тогда функция Коши уравнения (4) положительна, если
kh2 ξ(2 − ξ), где ξ — положительный корень уравнения (11).
Приближенные вычисления дают ξ ≈ 1.5936, а ξ(2 − ξ) ≈ 0.6476.
Отметим некоторые асимптотические свойства функции Коши, связанные с ее положительностью.
Теорема 5. Пусть выполнено неравенство (8). Тогда для любого фиксированного s функция C(t, s) имеет при t → ∞ конечный предел, причем
а) если ρ ∈ L1 , то lim C(t, s) > 0;
t→∞
б) если ρ ∈ L1 , то lim C(t, s) = 0.
t→∞
Доказательство. а) Пусть ρ ∈ L1 . Рассмотрим уравнение (6) на отрезке [0, l], доопределив
его коэффициенты при u = l. Из неравенства (8) следует
1
vrai sup(T (u) + H(u)) = vrai sup(T (u) + H(u)) .
e
u∈[0,l)
u∈[0,l]
Из теоремы 1 (случай конечного отрезка) вытекает Y (l, v) > 0. Из непрерывности Y (u, v)
по первому аргументу получаем lim C(t, s) = lim Y (ϕ(t), ϕ(s)) = lim Y (u, v) = Y (l, v) > 0.
t→∞
t→∞
u→l
б) Пусть ρ ∈
/ L1 . По теореме 3 C(t, s) > 0 при всех (t, s) ∈ ∆. Следовательно, Y (u, v) > 0
при всех (u, v) ∈ ∆l . Поэтому в силу уравнения (6) она монотонно убывает по первому
ПРИЗНАКИ ПОЛОЖИТЕЛЬНОСТИ ФУНКЦИИ КОШИ
55
аргументу. Значит, существует предел y(v) = lim Y (u, v) 0. Учитывая, что Y (u, v) > y(v),
u→∞
перепишем (7) в виде
u ζ−T (ζ)
1 − Y (u, v) =
v
ζ−T (ζ)−H(ζ)
K(ζ, ξ)Y (ξ, v) dξ dζ y(v)(u − v).
Допустим, что y(v) > 0. Тогда функция в левой стороне неравенства ограничена, а в
правой не ограничена. Получаем противоречие, следовательно, lim Y (u, v) = 0. Значит,
u→∞
lim C(t, s) = 0, так как u → ∞ соответствует t → ∞.
t→∞
2. Некоторые обобщения
Перейдем
к исследованию уравнения (1) общего вида. Сделав замену x(t) = e−
t
f (t) = e− 0 a(s) ds g(t), получаем
t−τ (t)
t
k(t, s)e s a(θ) dθ y(s) ds = g(t), t ∈ R+ .
ẏ(t) +
t−τ (t)−h(t)
t
0
a(s) ds
y(t),
(12)
t
Уравнение (12) является уравнением вида (4) с ядром k(t, s)e s a(θ) dθ . Следовательно, для
него справедливы теоремы 2–5 из раздела 1.
Обозначим через C функцию Коши уравнения (1), а через C0 — функцию Коши уравнения (12). Ясно, что
t
(13)
C(t, s) = e− s a(θ) dθ C0 (t, s).
Таким образом, если одна из функций C и C0 положительна, то и другая тоже положительна.
t−τ
t
(t)
k(t, s)e s a(θ)dθ ds и потребуем, чтобы
Для уравнения (12) введем функцию r(t) =
t−τ (t)−h(t)
она была локально суммируемой и r(t) > 0, начиная с некоторого T .
Из теоремы 5 и равенства (13) следует
Теорема 6. Пусть vrai sup
t
t
t−τ (t)−h(t)
r(s) ds 1e . Тогда C(t, s) > 0 и при любом фиксиро-
ванном s существует lim C(t, s), причем
t→∞
а) если r ∈ L1 и a ∈ L1 , то lim C(t, s) > 0;
t→∞
/ L1 , то lim C(t, s) = 0.
б) если r ∈
/ L1 или a ∈
t→∞
Для уравнения (1) с ограниченными параметрами более сильный результат дает непосредственное применение теоремы 1 (случай полуоси). Обозначим a = sup a(t), k = sup k(t, s),
t
t,s
τ th
1−et
2
на множестве
τ = sup τ (t), h = sup h(t), а также введем функцию ψ(t) = t−ah+kh e
t
t
t
R+ , доопределив ее в нуле по непрерывности: ψ(0) = −ah − kh2 .
Возьмем v(t) = e−αt , α > 0, и применим к уравнению (1) теорему 1. В силу предположеt−τ
(t)
k(t, s)e−αs ds ний на параметры уравнения, получаем (Lv)(t)≡−αe−αt +a(t)e−αt +
t−τ (t)−h(t)
−αe−αt + ae−αt + k
t−τ
(t)
t−τ (t)−h(t)
e−αs ds −αe−αt ψ(αh). Следовательно, если найдется α > 0,
56
Т.Л. САБАТУЛИНА
при котором ψ(αh) 0, то L(e−αt ) 0 и условие теоремы 1 выполнено. В результате задача свелась к следующей: при каких условиях на параметры ah, kh2 , hτ для функции ψ
найдется хотя бы одна точка ζ, в которой ψ(ζ) 0?
Исследуя поведение функции ψ на R+ , получаем, что функция ψ (t) не обращается в нуль
ни в одной точке и, более того, ψ (t) < 0 при любых t (в связи с непрерывностью функции
ψ (t)). Отсюда следует, что ψ (t) монотонно убывает, а значит, уравнение ψ (t) = 0 либо не
имеет корней, либо его решение единственно. Это решение, если оно существует, является
единственной точкой максимума функции ψ(t).
Пусть ah, kh2 , hτ — значения параметров, при которых система
⎧
2 t τ 1−et
⎪
= 0,
⎨ ψ(t) ≡ t − ah + kh e h t
τ
et h t ⎪
⎩ ψ (t) ≡ 1 + kh2
e 1 − t hτ + 1 − 1 + t hτ = 0
2
t
имеет решение на R+ . Очевидно, множество точек с координатами (ah, kh2 , hτ ) образует
в пространстве параметров поверхность, являющуюся границей области положительности
функции Коши.
Теорема 7. Для положительности функции Коши уравнения (1) достаточно, чтобы
точка M (ah, kh2 , τ /h) принадлежала области, ограниченной плоскостями, образованными
осями координат, и поверхностью, заданной параметрическими уравнениями
τ
ξ 1 − eξ
ξ 2 e−ξ h
2
, ξ ξ0 ,
=
,
kh
ah = ξ + ξ τ
e ξ h + 1 − 1 + 1 − ξ hτ
eξ ξ hτ + 1 − 1 + 1 − ξ hτ
где ξ0 — положительный корень уравнения (11).
В работе [15] изучалось уравнение (1) в предположении, что a(t) ≡ a, k(t, s) ≡ k. Достаточное условие положительности функции Коши этого уравнения описывалось теоремой,
совпадающей с теоремой 7. В этой же работе приведена геометрическая интерпретация
области положительности функции Коши.
Введем функцию α = ω(β), заданную параметрически следующими равенствами:
ξ 1 − eξ
ξ2
, β= ξ
, ξ ξ0 ,
α=ξ+ ξ
e (ξ − 1) + 1
e (ξ − 1) + 1
где ξ0 — положительный корень уравнения (11).
Следствие 2 ([16]). Пусть τ = 0, sup k(t, s) = k, sup a(t) = a, sup h(t) = h и ah ω kh2 .
t,s
t
Тогда функция Коши уравнения (1) положительна.
t
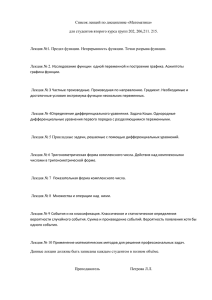
На рис. 1 закрашена область положительности функции Коши (в случае τ = 0), которую в случае ограниченных ядра и запаздывания дает
6. Применение следствия 2
теорема
позволяет расширить эту область до кривой ah = ω kh2 .
Заметим, что теорема 3 и теорема 4 (соответственно, теорема 6 и теорема 7) имеют разные
области применимости: теоремы 3 и 6 позволяют работать с уравнениями, ядра которых
имеют суммируемые особенности; теоремы 4 и 7 в этом случае неприменимы. Для уравнений
с ограниченными параметрами работают все четыре теоремы, но чем ближе коэффициенты
к постоянным, тем лучший результат дают теоремы 4 и 7 по сравнению с теоремами 3 и 6,
и, наконец, для случая автономных уравнений теоремы 4 и 7 превращаются (см. [15]) в
критерии положительности функции Коши.
ПРИЗНАКИ ПОЛОЖИТЕЛЬНОСТИ ФУНКЦИИ КОШИ
57
Рис. 1. Область положительности функции Коши
3. Приложения к биологическим моделям
3.1. Уравнение Хатчинсона–Райта. Рассмотрим уравнение Хатчинсона–Райта, описывающее динамику популяции с учетом последействия, когда запаздывание предполагается распределенным,
1 t
k(t, s)N (s) ds , t > 0.
(14)
Ṅ (t) = r(t)N (t) 1 −
K t−h(t)
Здесь постоянная K > 0, k : R2+ → (0, +∞), h, r : R+ → (0, +∞), функция k(t, ·) локально
t
k(t, s) ds = 1. При отрисуммируема, функции k(·, s), r, h измеримы по Лебегу на R+ ,
t−h(t)
цательных t решение доопределено начальной функцией ϕ. Будем считать, что при t < 0
либо ϕ(t) < K, N (0) < K, либо ϕ(t) > K, N (0) > K. Так как оба случая можно рассматривать по одной схеме, то далее будем анализировать только первый из них. Заметим, что
если ϕ(t) ≡ K, то N (t) ≡ K.
Легко видеть, что для уравнения (14) N (t) ≡ K является точкой равновесия. С помощью
замены переменных N (t) = Ke−x(t) уравнение (14) сводится к уравнению
t
ẋ(t) = −r(t)
k(t, s)f (x(s)) ds,
(15)
t−h(t)
где f (x) = 1 − e−x . Для уравнения (15) точкой равновесия является x = 0.
Введем функцию g(x) = x − f (x) = x + e−x − 1. Очевидно, g(x) > 0 при x = 0, а g(0) = 0.
Перепишем уравнение (15) в виде
t
t
k(t, s)x(s) ds = r(t)
k(t, s)g(x(s)) ds
ẋ(t) + r(t)
t−h(t)
t−h(t)
или в силу представления (2) в эквивалентной интегральной форме
t
s
C0 (t, s)r(s)
k(s, θ)g(x(θ)) dθ ds.
x(t) = X0 (t)x(0) +
0
s−h(s)
(16)
58
Т.Л. САБАТУЛИНА
Здесь X0 (t) и C0 (t, s) — фундаментальное решение и функция Коши уравнения
t
ẋ(t) + r(t)
k(t, s)x(s) ds = 0,
(17)
t−h(t)
к которому применимы результаты, полученные в данной работе. В зависимости от условий
на параметры исходной задачи к уравнению (17) целесообразно применять разные теоремы. Если никаких условий, кроме приведенных выше, на параметры r, k и h не накладывать, то лучшим вариантом будет применение теоремы 3. Для уравнения (17) ρ(t) =
t
t
k(t, s) ds = r(t). Следовательно, если vrai sup
r(s) ds 1e , то C0 (t, s) > 0. Тоr(t)
t
t−h(t)
гда из соотношения (16) вытекает
t−h(t)
x(t) X0 (t)x(0).
(18)
Значит, если x(0) > 0, то x(t) > 0, а f (x(t)) > 0. Поэтому из уравнения (15) получаем
ẋ(t) < 0, т. е. x(t) монотонно убывает и, следовательно, имеет предел на бесконечности.
Возвращаясь к функции N , получаем следующую теорему.
Теорема 8. Пусть vrai sup
t
t
r(s) ds t−h(t)
1
e.
Тогда решение уравнения (14) монотонно
возрастает, ограничено константой K и имеет предел, причем
а) если r ∈ L1 , то lim N (t) < K;
t→∞
б) если r ∈ L1 , то lim N (t) = K.
t→∞
Доказательство. Пункт а) следует из неравенства (18) и теоремы 5. Остается доказать б).
Перепишем уравнение (15) в виде
t
s
x(t) − x(0) = −
r(s)
k(s, θ)f (x(θ)) dθ ds.
0
s−h(s)
Допустим, что lim N (t) < K, т. е. lim x(t) = c > 0 и f (x) 1 − e−c > 0. Тогда x(0) −
x(t) > (1 −
e−c )
t→∞
t
0
t→∞
r(s) ds, но функция в левой части ограничена, а в правой не ограничена.
Следовательно, допущение неверно и lim N (t) = K.
t→∞
Пусть теперь параметры уравнения (15) подчинены более жестким условиям — например, уравнение (15) является автономным. Тогда лучший результат дает применение следствия 1.
Теорема 9. Пусть r(t) ≡ r, k(t, s) ≡ h1 , h(t) ≡ h и rh ξ(2 − ξ), где ξ — положительный корень уравнения (11). Тогда решение уравнения (14) монотонно возрастает и имеет
предел lim N (t) = K.
t→∞
3.2. Уравнение Lasota–Wazewska. Рассмотрим обобщенное уравнение Lasota–Wazewska с распределенным запаздыванием, которое описывает продолжительность существования красных кровяных телец,
t
k(t, s)e−γN (s) ds, t > 0.
(19)
Ṅ (t) = −µN (t) + p
t−h(t)
ПРИЗНАКИ ПОЛОЖИТЕЛЬНОСТИ ФУНКЦИИ КОШИ
59
Здесь постоянные µ, p, γ положительны, k : R2+ → (0, +∞), h : R+ → (0, +∞), функция
t
k(t, s) ds=1.
k(t, ·) локально суммируема, функции k(·, s), h измеримы по Лебегу на R+ ,
t−h(t)
При отрицательных t решение доопределено начальной функцией ϕ; для определенности
снова будем считать, что ϕ(t) > N ∗ при t < 0, N (0) > N ∗ , где N ∗ — точка равновесия,
∗
определяемая как решение уравнения N ∗ = µp e−γN .
С помощью замены переменных N = x + N ∗ уравнение (19) сводится к уравнению
t
∗
ẋ(t) = −µx(t) − µN
k(t, s)f (x(s)) ds,
(20)
t−h(t)
где f (x) = 1 − e−γx . Для уравнения (20) точкой равновесия является x = 0.
Введем функцию g(x) = γx − f (x) = γx + e−γx − 1. Очевидно, g(x) > 0 при x = 0, а
g(0) = 0. Перепишем уравнение (20) в виде
t
t
∗
∗
ẋ(t) + µx(t) + µγN
k(t, s)x(s) ds = µN
k(t, s)g(x(s)) ds
t−h(t)
t−h(t)
или в силу представления (2) в эквивалентной интегральной форме
s
t
∗
C0 (t, s)
k(s, θ)g(x(θ)) dθ ds.
x(t) = X0 (t)x(0) + µN
(21)
Здесь X0 (t) и C0 (t, s) — фундаментальное решение и функция Коши уравнения
t
ẋ(t) + µx(t) + µγN ∗
k(t, s)x(s) ds = 0,
(22)
0
s−h(s)
t−h(t)
которое является частным случаем уравнения (1), исследованного в разделе 2. Для уравнеt
t
k(t, s)eµ(t−s) ds, a(t)≡µ. Следовательно, если vrai sup
r(s) ds ния (22) r(t)=µγN ∗
1
e,
t
t−h(t)
t−h(t)
то по теореме 6 C0 (t, s) > 0 и lim C(t, s) = 0. Тогда из соотношения (21) вытекает, что
t→∞
x(t) X0 (t)x(0). Значит, если x(0) > 0, то x(t) > 0, а f (x(t)) > 0. Поэтому из уравнения (20) получаем ẋ(t) < 0, т. е. x(t) монотонно убывает и, следовательно, имеет предел на
бесконечности. Теперь в силу представления (2) запишем уравнение (20) в виде
t
s
−µt
∗
−µ(t−s)
e
k(s, θ)f (x(θ)) dθ ds.
x(t) = e x(0) − µN
0
s−h(s)
Откуда x(t) e−µt x(0). Возвращаясь к функции N , получаем следующую теорему.
Теорема 10. Пусть µγN ∗ vrai sup
t
t
s
k(s, θ)eµ(s−θ) dθ ds t−h(t) s−h(s)
1
e.
Тогда решение урав-
нения (19) стремится к N ∗ , монотонно убывая, и имеет двустороннюю оценку
X0 (t)(N (0) − N ∗ ) N (t) − N ∗ e−µt (N (0) − N ∗ ),
(23)
где X0 (t) — фундаментальное решение уравнения (22).
Если уравнение (20) автономно, то лучший результат дает применение следствия 2.
Теорема 11. Пусть k(t, s) ≡ h1 , h(t) ≡ h и µh ω(µγhN ∗ ). Тогда решение уравнения (19)
стремится к N ∗ , монотонно убывая, и имеет двустороннюю оценку (23).
60
Т.Л. САБАТУЛИНА
3.3. Уравнение Nicholson’а. Рассмотрим уравнение с распределенным запаздыванием,
моделирующее популяцию мясных мух (Nicholson’s Blowflies equation),
t
k(t, s)N (s)e−αN (s) ds, t > 0.
(24)
Ṅ (t) = −δN (t) + p
t−h(t)
Предполагаем, что p > δe2 > 0, α > 0, k : R2+ → (0, +∞), h : R+ → (0, +∞), функция k(t, ·)
t
k(t, s) ds = 1.
локально суммируема, функции k(·, s), h измеримы по Лебегу на R+ ,
t−h(t)
При отрицательных t решение доопределяем начальной функцией ϕ, считая, что ϕ(t) > N ∗
при t < 0, N (0) > N ∗ , где N ∗ = α1 ln pδ — точка равновесия уравнения (24).
С помощью замены переменных N = αx + N ∗ уравнение (24) сводится к уравнению
t
k(t, s)f (x(s)) ds,
(25)
ẋ(t) = −δx(t) − δ
t−h(t)
−x
где f (x) = ln pδ (1 − e−x ) − xe
равновесия является x = 0.
.p Для уравнения (25)p точкой
−
1
x
−
f
(x)
=
ln
−
1
x
−
ln pδ (1 − e−x ) + xe−x . Вычислим
Введем
функцию
g(x)
=
ln
δ
δ
g (x) = ln pδ − 1 (1 − e−x ) − xe−x , g (x) = ln pδ − 2 e−x + xe−x . Пусть x > 0. Тогда g (x) >
0, т. е. g (x) монотонно возрастает. Так как g (0) = 0, то g (x) > 0, т. е. g(x) монотонно
возрастает. Поскольку g(0) = 0, то g(x) > 0. Теперь пусть x < 0. Тогда g (x) < 0, т. е. g(x)
монотонно убывает. Так как g(0) = 0, то g(x) > 0. Значит, g(x) > 0 при x = 0, а g(0) = 0. С
учетом представления (2) перепишем уравнение (25) в виде
t
s
C0 (t, s)
k(s, θ)g(x(θ)) dθ ds,
x(t) = X0 (t)x(0) + δ
0
s−h(s)
где X0 (t) и C0 (t, s) — фундаментальное решение и функция Коши уравнения
t
p
ẋ(t) + δx(t) + δ ln − 1
k(t, s)x(s) ds = 0.
δ
t−h(t)
(26)
Повторяя рассуждения, примененные к уравнению (19), в силу теоремы 6 и следствия 2
приходим к следующим результатам.
t
Теорема 12. Пусть p > δe2 , δ ln pδ − 1 vrai sup
t
s
t−h(t) s−h(s)
k(s, θ)eδ(s−θ) dθ ds 1e . Тогда ре-
шение уравнения (24) стремится к N ∗ , монотонно убывая, и имеет двустороннюю оценку
X0 (t)(N (0) − N ∗ ) N (t) − N ∗ e−δt (N (0) − N ∗ ),
(27)
где X0 (t) — фундаментальное решение уравнения (26).
Теорема 13. Пусть p > δe2 , k(t, s) ≡ h1 , h(t) ≡ h и δh ω δh ln pδ − 1 . Тогда решение
уравнения (24) стремится к N ∗ , монотонно убывая, и имеет двустороннюю оценку (27).
4. Сравнение с известными результатами, комментарии
Проведенные в разделах 1–3 исследования показывают, что функционально-дифференциальные уравнения с распределенным запаздыванием обладают рядом интересных свойств.
ПРИЗНАКИ ПОЛОЖИТЕЛЬНОСТИ ФУНКЦИИ КОШИ
61
С одной стороны, уравнение с сосредоточенным запаздыванием в некотором смысле действительно можно считать “предельным” случаем уравнения с распределенным запаздыванием, но предельный переход, как показывает пример (см. с. 53–54), становится возможным, только если ядро уравнения (1) не ограничено. В этом случае наблюдается согласование свойств решений этих уравнений. Действительно, положим в уравнении (4) h(t) ≡ h,
k(t, s) = r(t)
h . Тогда при h → 0 из однородного уравнения (1) получаем
ẋ(t) + r(t)x(t − τ (t)) = 0,
для которого неравенство vrai sup
t
t
t−τ (t)
r(s) ds 1
e
(28)
является точным достаточным усло-
вием положительности функции Коши уравнения (28) ([2], c. 66). Тот же результат дает
теорема 3. В этом смысле 1e можно считать универсальной константой для целого класса
функционально–дифференциальных уравнений, разрешенных относительно производной.
Признаки положительности функции Коши (знакоопределенности решения), аналогичные
теоремам 3 и 6, получены в работах [6], [11]–[13].
С другой стороны, если ядро уравнения (1) является ограниченным по совокупности
переменных, то, как показывают теоремы 4 и 7, уравнение (1) начинает существенно отличаться от уравнения с сосредоточенным запаздыванием. Пренебрежение этими отличиями
приводит к неточным, а порою — и к ошибочным результатам.
Остановимся более подробно на результатах работы [17], в которой также изучаются
биологические модели, рассмотренные в разделе 3.
Пусть в уравнении (14) r(t) ≡ r, k(t, s) ≡ h1 , h(t) ≡ h. Теорема 5 из работы [17] утверждает, что при rh > 1e решение уравнения (14) осциллирует около положения равновесия K.
Однако из теоремы 9 следует, что решение уравнения (14) остается неосциллирующим при
rh ξ(2 − ξ) ≈ 0.6476, т. е. область неосцилляции может быть существенно расширена.
Рассмотрим уравнения (19) и (24). Пусть k(t,
s) ≡ h1 , h(t) ≡ h. Согласно следствию 4 и
теореме 8 из работы [17] при γN ∗ (eµh −1) > 1e и ln pδ −1 (eδh −1) > 1e решения уравнения (19)
и (24) соответственно осциллируют около своих положений равновесия N ∗ . Но из теорем
11 и 13 следует, что решения
уравнения
(19) и (24) остаются неосциллирующими при µh ω(µγhN ∗ ) и δh ω δh ln pδ −1 соответственно. Насколько может быть расширена область
неосцилляции, видно из рис. 1: область включает не только закрашенную часть, но и часть,
простирающуюся до кривой ω.
Литература
[1] Азбелев Н.В., Максимов В.П., Рахматуллина Л.Ф. Введение в теорию функционально-дифференциальных уравнений (Наука, М., 1991).
[2] Азбелев Н.В., Симонов П.М. Устойчивость решений уравнений с обыкновенными производными (Издво Пермск. ун-та, Пермь, 2001).
[3] Berezansky L., Braverman E., Domoshnitsky A. First order functional differential equations: nonoscillation
and positivity of Green’s functions, Functional differential equation 1–2, 57–94 (2008).
[4] Мышкис А.Д. Линейные дифференциальные уравнения с запаздывающим аргументом (Наука, М.,
1972).
[5] Коплатадзе Р.Г., Чантурия Т.А. О колеблющихся и монотонных решениях дифференциального уравнения первого порядка с отклоняющимся аргументом, Дифференц. уравнения, № 8, 1463–1465 (1982).
[6] Гусаренко С.А., Домошницкий А.И. Об асимптотических и осцилляционных свойствах линейных
скалярных функционально-дифференциальных уравнений первого порядка, Дифференц. уравнения 25
(12), 2090–2103 (1989).
[7] Györi I., Ladas G. Oscillation theory of delay differential equations with applications (Clarendon Press,
Oxford University Press, New York, 1991).
62
Т.Л. САБАТУЛИНА
[8] Erbe L.H., Kong Q., Zhang B. Oscillation theory for functional differential equations (Marcel Dekker, New
York, 1995).
[9] Berezansky L., Braverman E. On non-oscillation of a scalar delay differential equation, Dynam. Systems
Appl. 6, 567–580 (1997).
[10] Agarwal R.P., Domoshnitsky A. Nonoscillation of the first order differential equations with unbounded
memory for stabilization by control signal, Appl. Math. Comput. 173, 177–195 (2006).
[11] Morgenthal K. Über das asymptotische der Lösungen einer linearen Differentialgleichung mit Nachwirkung,
Z. Anal. Anwendungen 4 (2) 107–124 (1985).
[12] Sugie J. Ostillating solutions of scalar delay-differential equations with state dependence, Applicable Analysis
27, 217–227 (1988).
[13] Berezansky L., Braverman E. On oscillation of equations with distributed delay, Z. Anal. Anwendungen 20
(2), 567–580 (2001).
[14] Malygina V.V. Positiveness of the Cauchy function and stability of a linear differential equation with
distributed delay, Memoirs on Diff. Equations and Math. Physics 41, 87–96 (2007).
[15] Малыгина В.В., Сабатулина Т.Л. Знакоопределенность решений и устойчивость линейных дифференциальных уравнений с переменным распределенным запаздыванием, Изв. вузов. Математика, № 8, 73–77
(2008).
[16] Sabatulina T.L. On the positiveness of the Cauchy function of integro-differential equations with bounded
aftereffect, Functional differential equation 3–4, 273–282 (2008).
[17] Berezansky L., Braverman E. Linearized oscillation theory for a nonlinear equation with a distributed delay,
Mathematical and Computer Modelling 48, 287–304 (2008).
Т.Л. Сабатулина
аспирант, кафедра вычислительной математики и механики,
Пермский государственный технический университет,
614000, г. Пермь, Комсомольский пр., д. 29a,
e-mail: tlsabatulina@list.ru
T.L. Sabatulina
Postgraduate, Chair of Computational Mathematics and Mechanics,
Perm State Technical University,
29a Komsomol’skii Ave., Perm, 614000 Russia,
e-mail: tlsabatulina@list.ru