3-13 -
advertisement

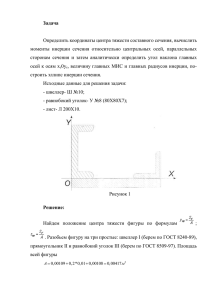
1. ВВЕДЕНИЕ 1.1. Допущения сопротивления материалов Сопротивление материалов – это наука о прочности, жесткости и устойчивости. Прочность – это способность материала выдерживать заданные нагрузки, не разрушаясь. Жесткость – это способность конструкции сопротивляться деформированию при действии заданных нагрузок. Устойчивость – это способность конструкции сохранять свою форму при действии заданных нагрузок. Основные допущения, используемые в сопротивлении материалов : 1. В отличие от теоретической механики, материал считается не абсолютно твердым, а деформируемым. 2. В большинстве задач материал считается абсолютно упругим, то есть принимает первоначальную форму после снятия нагрузки. 3. Материал считается сплошным, то есть не учитывается то, что он состоит из атомов, кристаллов и считается, что материал полностью заполняет весь объем конструкции. 4. Материал считается однородным, то есть весь объем материала обладает одинаковыми механическими свойствами. 5. Материал считается изотропным, то есть имеет одинаковые механические свойства во всех направлениях. Материалы, не обладающие этим свойством, называются анизотропными. 6. Абсолютные деформации элементов конструкции считаются малыми по сравнению с размерами этих элементов. 7. Выполняется принцип суперпозиции или независимости действия сил, то есть, если на конструкцию действуют несколько сил, то усилия, напряжения и перемещения, возникающие в этой конструкции от действия этих сил, будут равны сумме усилий, напряжений и перемещений от действия каждой силы отдельно. F2 F1 B F2 B B F1 F2 F 2 B F1 B F1 F2 Рис. 1.1 B B F2 B F1 F1 B F1 B B F1 F2 F2 B Рис.1.2 На рис. 1.1 показан пример применения принципа суперпозиции, а на рис. 1.2 приведен пример, в котором этот принцип не работает. 3 F F F 2 A A Рис. 1.3 8. Принцип Сен-Венана. Если на небольшую, по сравнению с размерами конструкции область, действует заданная система сил, то ее можно заменить равнодействующими: силой и моментом, отбросив при рассмотрении конструкции эту малую область , рис. 1.3. 1.2. Схематизация конструкций и нагрузок Реальный объект – это та конструкция, которую необходимо рассчитать. Расчетная схема – это реальный объект, освобожденный от несущественных подробностей. На рис.1.4,а. представлен реальный объект подъемный кран, а на рис.1.4,б. и рис.1.4,в.- расчетные схема троса и стрелы крана. В сопротивлеl нии материалов расl сматриваются следующие расчетные Q схемы: Стержень (брус, l Q Q Q троса вал, балка) – это элемент конструка б в ции, у которого один размер – длина, Рис.1.4 намного больше двух других размеров поперечного сечения. Оболочка – это элемент конструкции, у которого один размер, толщина, намного меньше двух других размеров. Пластинка – это оболочка с плоской срединной поверхностью. F H mHM H q M б Рис. 1.5 К расчетной схеме прикладывают нагрузки : 4 1. Внешние – силы взаимодействия элементов конструкции с окружающими ее телами и внутренние – силы взаимодействия между соседними частицами тела ( молекулами, кристаллами ). 2. Сосредоточенные : сила ( рис.1.5,а ), момент ( рис.1.5,б ) и распределенные по длине ( рис.1.5,в ), по площади и по объему. 3. Статические и динамические в зависимости от скорости их изменения во времени. 4. Постоянные и временные в зависимости от времени их действия. 1.3. Метод сечений, внутренние силы Рассмотрим некоторое тело, на которое действуют заданные нагрузки. В каждом месте тела на него действуют свои нагрузки, для их определения используют метод сечений. Мысленно рассекаем тело на две части какойлибо поверхностью, чаще всего используем плоскость ( рис.1.6,а). Затем мысленно одну из частей отбрасываем, и рассматриваем равновесие оставшейся части ( рис.1.6,б ). F1 1 F2 F2 а F3 F1 F1 2 1 1 F4 F4 F2 F2 б F2 F2 F M в Рис 1.6 Между I и II частями тела существуют внутренние силы взаимодействия, произвольно направленные. Приведем эти силы взаимодействия к центру тяжести сечения, получим главный y вектор F и главный момент M ( рис.1.6,б ). MY Разложим главный вектор и главный QY момент по осям координат ( рис.1.7). Проекции главного вектора: MK - продольная сила, N QX , QY - поперечные силы. z Проекции главного момента: MX N M K - крутящий момент, M X , M Y - изгибающие моменты. QX x Для того, чтобы найти все эти шесть внутренних сил, необходимо составить Рис 1.7 5 шесть уравнений равновесия статики пространственной системы сил. F F m X 0 , откуда находим Q X . Z 0 , откуда находим N . Y 0 , откуда находим M Y . F 0 , откуда находим Q . m 0 , откуда находим M m 0 , откуда находим M Y Y . K . X X Z Только после того, как мы нашли из уравнений равновесия все силы, можем знать, какие виды нагружения испытывает тело: растяжение, изгиб или что-либо другое. Напряжения. Выделим в сечении малый участок площадью A . Приведем все силы, действующие на участке A , к центру тяжести этого участка ( рис.1.8,а ). Получим главный F вектор этих сил F . Главный момент буF1 дет отсутствовать вследствие малости плечей сил при их приведении к центру 1 F2 F1 а 1 A n F2 б F - среднее A напряжение на площадке A . Напряжение H измеряется в 2 Па . Стянем площадку м A в точку и получим напряжение в F точке . p lim A0 A тяжести. Тогда p pCP Разложим напряжение в точке p на Рис. 1.8 две составляющие: перпендикулярную к площадке - нормальное напряжение и лежащую в плоскости площадки - касательное напряжение ( рис.1.8,б ). Перемещения. При действии нагрузок на конструкцию она меняет свою форму, и каждая точка конструкции перемещается. Перемещения бывают линейными (обозначаются , ) и угловыми ( , ). Проекции линейного перемещения на координатные оси x, y, z обозначаются u, v, w. Деформации. Абсолютные деформации - это изменения первоначальных размеров в теле при нагружении. Относительная линейная деформация - это изменение при действии нагрузки длины единичного отрезка, выделенного в теле. Ее проекции на оси обозначаются X , Y , Z . Относительная угловая деформация - это изменение при действии нагрузки 6 прямого угла, выделенного двумя отрезками в теле. Проекции угловой деформации на координатные плоскости обозначаются XY , XZ , YZ . 1.4. Геометрические характеристики плоских сечений Рассмотрим произвольное поперечное сечение стержня. Простейшая геометрическая характеристика сечения – это площадь ( рис. 1.9 ) А = dA (м2) Величины А Sx = ydA (м ) и 2 А Sy = xdA (м2) А ( 1.1 ) называются статическими моментами сечения ( или площади ) относительно осей х и у. Y Статический момент сложной фиdA A гуры относительно некоторой оси равен сумме статических моментов простых фигур, составляющих эту сложy ную, относительно той же оси. Оси, Ρ проходящие через центр тяжести сечеX ния, называются центральными. Стаx тические моменты сечения относиРис 1.9 тельно центральных осей равны нулю. Статические моменты площади также можно вычислять по формулам: Sx = Ayc , Sy = Axc , ( 1.2 ) где xc и ус – координаты центра тяжести площади сечения. Чаще всего статические моменты площади используются для определения положения центра тяжести сложной фигуры. Пример определения положения центра тяжести сложной фигуры. Разделим сложную фигуру ( рис. 1.10 ) на простые, найдем у них центры тяжести и определим их координаты, а также их площади. хс1 = В/2, уc1 = H/2, A1 = BH ; хc2 = B + b/2, уc2 = h/2, A2 = bh ; хc3 = Xотв, уc3 = Yотв, А3 = d2/4. Так как SY = Axc , то Sy Sy I Sy II Sy III A1x c1 A 2 x c2 A 3x c3 xc . A A A A A A A 1 2 3 1 2 3 Аналогично, из SX = Ayc следует, что 7 S Sx I Sx II Sx III A1 yc1 A 2 yc 2 A 3 yc3 Yc X A A A A A A A 1 2 3 1 2 3 Координаты xc и ус центра тяжести сложной фигуры найдены. Величины: Ix= y2dA (м4) А и Iy = x2dA (м4) А ( 1.3 ) называются осевыми моментами инерции сечения относительно осей х и у. Ix 0, Iy 0. Величины: Ixy = xy dA (м4) , ( 1.4 ) А Ip = 2dA (м4) ( 1.5 ) А называются центробежным моментом инерции сечения относительно системы осей х, у и полярным моментом инерции системы относительно полюса 0. Ixy 0, IP 0. IP = 2 dA = (x2+y2)dA = x2dA + y2dA = IY + IX . А Величины: А А Wx = Ix/ ymax ; А Wy = Iy / xmax (м3) ( 1.6 ) называются осевыми моментами сопротивления относительно осей х и у, а величина Wp = Ip / max. ( 1.7 ) - полярным моментом сопротивления. 8 Величины: Ix A ix = ; iy = Iy (м) A ( 1.8 ) называются радиусами инерции относительно осей х и у. Примеры определения геометрических характеристик . Прямоугольное сечение ( рис. 1.11 ). Элементарную площадку dA выберем в виде полоски b*dy. h h 2 2 2 y3 b h3 h3 bh 3 2 . Ix y dA y bdy b ( ) 3 8 8 12 3 A h h 2 2 Y R d dy h С с X B Рис. 1.11 Аналогично ; Iy d d D Рис. 1.12 Рис. 1.13 hb 3 Ix bh 3 bh 2 ; Wx 12 6 h ymax 12 2 и Wу b2h . 6 Круглое сечение ( рис. 1.12 ). Ip = 2dA . Элементарную площадку A dA выберем в виде кольца радиусом и толщиной d. Если развернем кольцо в полоску, то получим, что dA = 2πd. R I = A 2dA = 22πd =2π( O Так как Ip = Ix + Iy , то 4 ) 4 Ix = Iy = R = R 4 = 0 2 d 4 d 4 ( ) = 0,1d4. 2 2 32 Ip R 4 d 4 = = 0,05d4. 2 4 64 9 Wp = Ip max Wx =Wy = = R 4 R 3 d 3 = = 0,2d3. 2R 2 16 Ix = Ix R 3 d 3 = = 0,1d3 . 4 32 R y max Кольцевое сечение ( рис.1.13 ). Моменты инерции сложной фигуры равны сумме моментов инерции простых фигур, составляющих эту сложную. Тогда для кольца Ip = Ip большого круга – Ip меньшего круга= D 4 d 4 D 4 d4 d4 4 (1 4 ) 0,1D (1 4 ) . 32 32 32 D D 4 4 4 4 4 Ix = Iy D d D (1 d 4 ) 0,05D 4 (1 d 4 ) . 64 64 64 D D Моменты сопротивления сложной фигуры не равны сумме моментов сопротивления простых фигур, составляющих эту сложную πD4 d4 (1 ) 3 4 4 Ip 4 32 D πD (1 d ) 0,2D 3 (1 d ) Wp D ρ max 16 D4 D4 2 Если бы мы ошибочно считали, что моменты сопротивления сложной фигуры равны сумме моментов сопротивления простых фигур, составляющих эту сложную, то в результате получили бы d3 Wp 0,2D3 0,2d 3 0,2D3 (1 ) , что неверно !!!. 3 D 4 4 πD d (1 ) 4 64 Ix πD3 d4 d4 D Wx W y (1 ) 0,1D 3 (1 ) D 4 4 y max 32 D D 2 Связь между моментами инерции относительно параллельных осей. Рассмотрим некоторое поперечное сечение, в котором известен центр тяжести сечения С и через него проведены оси х и у ( рис. 1.14 ). Пусть известны моменты инерции сечения относительно центральных осей: Ix, Iy, Ixy, а также расстояния a, b до произвольных осей х1 и у1. Требуется определить: Y Y1 Ix1, Iy1, Ix1y1 . B Выразим х1 и у1 через х и у: dA x1 = x – b, y1 = y – a. Тогда y1 O1 y 10 x1 O X1 a X x Рис. 1.14 Ix1 = y12 dA = (y – a)2dA = = y2dA - A A 2a ydA + a A 2 A 2yadA + A A a2dA = = y2dA – A dA = A = Ix –2aSx + a2A. Так как. ось х – центральная ось, то Sx = 0. Тогда Ix1 = Ix + a2A, аналогично Iy1 = Iy + b2A. ( 1.9 ) Ix1y1= x1y1dA= (x–b)(y–a)dA= xydA -b ydA - a xdA + ab dA= A A A A A A = Ixy – bSx – aSy + abA = Ixy +abA . ( 1.10 ) Эти формулы используются, когда оси х и у – центральные. Из этих формул следует, что Ix = Ix1 – a2A и Iy = Iy1 – b2A , то есть осевые моменты инерции относительно центральных осей является наименьшими по сравнению с осевыми моментами инерции относительно всех осей, параллельных центральным. Связь между моментами инерции относительно осей повернутых друг к другу на угол . Известны моменты инерции относительно произвольных осей Ix, Iy, Ixy и угол . Требуется найти моменты инерции Ix1, Iy1, Ix1y1 относительно повернутых осей ( рис.1.15 ). y y1 dA B x1 E D F K O G x Рис. 1.15 Выразим координаты повернутой системы осей через координаты заданной системы осей. x1 = OE = OK + KE = OK + GF =OG cos +GB sin = x cos + y sin. y1 = OD = BE = BF – FE = BF – KG = BG cos - OG sin = y cos - x sin. Тогда 11 Ix1 = y12 dA = A A * xy dA + sin 2 A Iy1 = ( y cos- x sin )2 dA = cos2 y2 dA – 2 sin cos* A x dA = Ix cos + Iv sin –Ixy sin2. 2 2 2 ( 1.11 ) A x12 dA = A ( x cos+y sin )2 dA = cos2 A * xy* dA + sin 2 A x2 dA + 2 cos sin* A y dA = Iy cos + Ix sin + Ixy sin2. 2 2 2 ( 1.12 ) A Ix1y1 = x1y1 dA = A =cos2 ( x cos + y sin )( y cos - x sin ) dA = A x y dA + sin cos A y2 dA - sin cos A = Ixy ( cos2 - sin2 ) + A x2 dA – sin2 Ix Iy sin2α ( Ix – Iy ) = sin2α + Ixy cos2. 2 2 xy dA= A ( 1.13 ) Сложим ( 1.11) и ( 1.12 ) . Получим Ix1 + Iy1 = Ix + Iy = const, то есть сумма осевых моментов инерции относительно взаимно перпендикулярных осей проходящих через данную точку есть величина постоянная. Главные оси инерции. Главные моменты инерции. Если меняется угол при повороте осей, то будут меняться Ix1 , Iy1 и Ix1y1, но всегда Ix10, Iy1 0 и Ix1y1 0 . При некотором положении угла = 0, центробежный момент инерции Ix1y1 обратиться в ноль. Зафиксируем это положение осей ( рис.1.16 ). Оси, относительно которых Ix0y0 = 0, Y называются главными и обозначаются х0 - у0 или u - v. Найдем положение Y0 X0 главных осей. Для этого в формуле ( 1.13 ) вместо подставим 0, 0 а вместо Ix1, Iy1 подставим Ix0, Iy0. O X Рис. 1.16 Ix0y0 = 12 Ix - Iy sin 2 0 Ixycos20 = 0. 2 2 I xy sin 2 0 cos 2 0 Ix Iy Ix - Iy sin 2 0 = -Ixycos20; 2 Окончательно tg 2 0 2 I xy ( 1.14 ) Ix Iy Подставляем значение 0 в ( 1.11 ) и в ( 1.12 ) , найдем осевые моменты инерции относительно главных осей Iu = Ix0 = Ixcos20 + Iysin20 – Ixysin20 ( 1.15 ) Iv = Iy0 = Iycos20 + Ixsin20 + Ixysin20 ( 1.16 ) Осевые моменты инерции относительно главных осей называются главными моментами инерции. Исследуем значение осевого момента инерции на экстремум в зависимости от угла . Возьмем производную от выражения ( 1.11 ) по и приравниваем ее к нулю. dIy1 / d = Ix2sincos - Iy2cos sin + Ixy2cos2 = 0. (Ix – Iy)sin2 = - Ixy 2cos2. sin2/cos2 = - 2Ixy / (Ix – Iy) = tg2, то есть α=α0 Осевые моменты инерции относительно главных осей принимают экстремальные значения по сравнению с осевыми моментами инерции относительно всех взаимно перпендикулярных осей , проходящих через данную точку. Главные оси, проходящие через центр тяжести, называются главными центральными осями, а соответствующие моменты инерции – главными центральный моментами инерции. Один из этих моментов инерции является наименьшим по сравнению со всеми осевыми моментами инерции сечения относительно любой оси. Выражения ( 1.15 ) и ( 1.16 ) можно преобразовать таким образом, чтобы в них не входил угол . Вычтем выражение ( 1.16 ) из выражения ( 1.15 ). Iu - Iv = Ix(cos20-sin20)-Iy(cos20-sin20)-2Ixysin20=(Ix-Iy)cos20-2Ixysin20 Из уравнения ( 1.14 ) следует, что Тогда -2 Ixy= ( Ix - Iy ) tg 2 0 13 sin 2 2 α Ix Iy 0 I u I v (I x I y )(cos2 ) (I x I y )sc 2 α 0 cos2 0 cos2 0 0 ( 1.17 ) 2 4I xy (I x I y )( 1 tg 2 2 α ) (I x I y )( 1 ) (I x I y ) 2 4I 2xy . 0 2 (I x I y ) Сложим выражения ( 1.15 ) и ( 1.16 ) Iu + Iv = Ix+ Iy . ( 1.18 ) Сложим выражения ( 1.17 ) и ( 1.18 ), затем вычтем из выражения (1.18) выражение ( 1.17 ) и, разделив результаты на 2, окончательно получим Ix Iy 1 ( 1.19 ) I u I max (I x I y ) 2 4I 2xy 2 2 v min 14