ivchin v a metod rascheta harakteristik rulevogo vinta v pri
advertisement

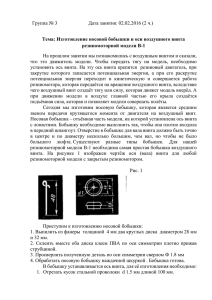
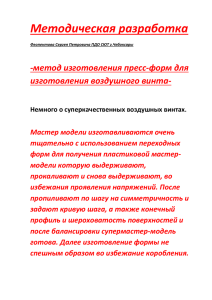
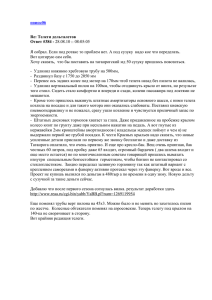
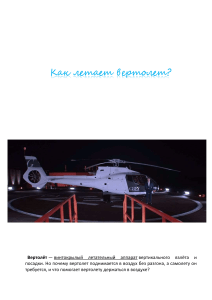
НАУЧНЫЙ ВЕСТНИК МГТУ ГА серия Аэромеханика и прочность 2007 № 111 УДК 629.735.45.015 МЕТОД РАСЧЕТА ХАРАКТЕРИСТИК РУЛЕВОГО ВИНТА В ПРИСУТСТВИИ КИЛЯ НА РЕЖИМЕ ВИСЕНИЯ В.А. ИВЧИН Статья представлена доктором технических наук, профессором Ципенко В.Г. Представлен метод расчета характеристик рулевого винта в присутствии киля. Метод расчета основан на дисковой вихревой теории винта и экспериментальных данных по исследованию взаимовлияния системы "винт + киль", показавших эффект, аналогичный влиянию земли на характеристики несущего винта. По разработанному методу проведено сравнение расчетных и экспериментальных данных и получено хорошее совпадение. Показано, что присутствие киля приводит к возникновению переменных нагрузок на валу рулевого винта и маховому движению лопастей на осевых режимах. Рулевой винт одновинтового вертолета, предназначенный для парирования крутящего момента несущего винта, работает, как правило, в присутствии киля. Присутствие килевой балки оказывает влияние на характеристики рулевого винта и приводит к увеличению потребных значений тяги и крутящего момента в трансмиссии вертолета, а также к увеличению потребного угла установки лопастей рулевого винта на режимах висения. До настоящего времени отсутствие метода расчета влияния киля на рулевой винт приводило к тому, что оценка нагрузок в трансмиссии и на валу рулевого винта в условиях его взаимодействия с килем носило приближенный характер. Испытания натурного рулевого винта и киля вертолета Ми-24, проведенные на винтовом стенде Московского вертолетного завода им. М.Л. Миля (МВЗ), показали, что киль благоприятно воздействует на аэродинамику рулевого винта, увеличивая его относительный к.п.д. [1]. Эти испытания также показали, что результаты натурных экспериментов достаточно сильно могут отличаться от исследований на моделях. Появление новых экспериментальных данных при проведении натурных исследований и при численных экспериментах позволило создать расчетный метод для определения характеристик системы "винт + киль" для использования в математических моделях одновинтовых вертолетов. Экспериментальные исследования характеристик натурной системы "винт + киль", проведенные на стенде МВЗ М.А. Грингаузом и В.А. Ивчиным [1], позволили получить новые экспериментальные данные по взаимовлиянию рулевого винта и киля. По предложению А.С. Бравермана эти исследования проводились с одновременными замерами сил и моментов на киле и на рулевом винте. Полученные экспериментальные результаты выявили ряд особенностей в аэродинамическом взаимодействии киля и рулевого винта, заключающиеся в следующем: – благоприятное влияние киля на рулевой винт, состоящее в увеличении относительного к.п.д. рулевого винта по сравнению с изолированным винтом; – влияние направления вращения винта на его характеристики в присутствии киля; – влияние направления тяги рулевого винта по отношению к килю. В последнее время также появились результаты расчетных исследований по оценке взаимовлияния киля и рулевого винта. Б. Крицким были проведены численные исследования работы системы "винт + киль" на основе применения метода дискретных вихрей [2], которые дали возможность обосновать подход к разработке инженерного метода расчета рулевого винта в присутствии киля. 54 В.А. Ивчин При разработке расчетного метода были приняты следующие положения: 1) аэродинамическое влияние киля на винт, в соответствии с расчетными исследованиями Б. Крицкого, рассматривается как эффект местной воздушной "подушки", приводящий к торможению индуктивного потока винта в области, расположенной над килем; 2) исходное распределение индуктивной скорости по диску винта находится по формулам Манглера-Сквайра [3] и В.Э. Баскина [4] для винта с постоянной по азимуту циркуляцией; 3) коэффициент торможения воздушного потока вследствие местного эффекта воздушной "подушки" определяется на основе экспериментальных данных и зависит от характеристик системы "винт + киль". Сила на киле от обдувки рулевого винта в соответствии с экспериментальными данными пропорциональна силе тяги рулевого винта и зависит от относительной площади киля, относительного расстояния между килем и винтом, направления тяги винта по отношению к килю и направления вращения винта. Для получения зависимости относительного коэффициента влияния киля на рулевой винт были использованы экспериментальные данные для натурной системы "винт + киль" [1] и данные зарубежных авторов, полученные на моделях [5]. На рис. 1 представлены для примера результаты экспериментальных исследований, проведенных на натурной системе "винт + киль" на МВЗ [1], для одного из исследованных вариантов. После анализа экспериментальных результатов полученные данные были использованы для корректировки данных работы [5]. 0.30 Изменение коэффициента крутящего момента при постоянном коэффициенте тяги винта из-за влияния киля, М=0.65. 0.30 0.25 0.25 Изменение угла установки лопастей при постоянном коэффициенте тяги винта из-за влияния киля, М=0.65. 0.20 0.20 0.15 ty ty 0.15 0.10 0.10 0.05 0.05 0.00 0.00 без.киля -0.05 без.киля -0.10 c.килем dMk c.килем -0.05 dFi -0.01 -0.10 -10 -5 0 5 10 Угол установки, градусы 15 0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 20 Коэффициент крутящего момента Рис. 1 На рис. 2 представлены исходные зависимости относительного увеличения потребной тяги рулевого винта из работы [5] и скорректированные для разработки программы расчета. Из графиков рис. 2 видно, что данные работы [5] превышают результаты эксперимента, полученные на натурном стенде МВЗ. На рис. 2 показаны приведенные зависимости, которые были применены в расчетах. В качестве расчетной модели рулевого винта рассматривался винт карданной схемы с двумя степенями свободы. Эта схема наиболее распространена для рулевого винта вертолета. Однако разработанная методика также применима и для шарнирного винта. За основу принята математическая модель трехлопастного рулевого винта вертолета Ми-8, разработанная для пилотажного стенда [6]. В математической модели винта каждая лопасть рассматривается отдельно, а движение оси конуса определяется интегрированием системы двух дифференциальных уравнений модифицированным методом Эйлера. Аналогичный подход применим и для шарнирного винта. В этом случае движение каждой лопасти интегрируется отдельно. 55 Метод расчета характеристик рулевого винта в присутствии киля на режиме висения Исходные зависимости Приведенные к эксперименту Sк/Fрв 1.5 Sк/Fрв 0.1 Относительное увеличение потребной тяги истемы "киль+винт", Трв/(Трв+Zк) Относительное увеличение потребной тяги истемы "киль+винт", Трв/(Трв+Zк) 1.5 0.2 1.4 0.3 0.4 1.3 Ми-24, Sк / Fрв=0.225 1 вариант 2 вариант 1.2 3 вариант ЦАГИ, Sк / Fрв=0.23 1.1 1 -0.6 -0.4 -0.2 "тянущий" 0 0.2 0.4 0.1 0.2 1.4 0.3 0.4 1.3 Ми-24, Sк / Fрв=0.225 1 вариант 1.2 2 вариант 3 вариант 1.1 1 0.6 -0.6 "толкающий" -0.4 -0.2 "тянущий" 0 0.2 0.4 0.6 "толкающий" Относительное расстояние между килем и винтом, Нк / Rрв Относительное расстояние между килем и винтом, Нк / Rрв Рис. 2 Основой разработанного метода является способ расчета индуктивных скоростей в плоскости диска рулевого винта с учетом влияния киля. Для расчета средней по диску индуктивной скорости применяется дисковая вихревая теория для винта с постоянной циркуляцией по азимуту, описанная во многих работах, например [4]. На режимах с положительным углом атаки средняя индуктивная скорость определяется на основе экспериментальных данных ЦАГИ [8] и метода расчета, изложенного в работе [9]. Расчет распределения индуктивных скоростей по диску рулевого винта в зависимости от режима полета производится по формулам К. Манглера и Х. Сквайра [3], а также В.Э. Баскина [4]. Как было показано в работе [2], влияние киля на рулевой винт заключается в торможении потока, протекающего через плоскость винта, независимо от направления тяги в области затенения килем рулевого винта. Поэтому предлагается расчетное поле индуктивных скоростей, определенное для изолированного винта, деформировать в области затенения килем в сторону снижения скорости потока воздуха, протекающего через винт. Расчет индуктивной скорости для винта, работающего вблизи киля, определяется в общем случае по следующей формуле: vi (ψ,r) = viokim, где kim = ki ⋅ km ⋅ kv – коэффициент распределения индуктивной скорости рулевого винта с учетом киля; ki = f(Vx,Vy,Ψ, r) – коэффициент распределения индуктивной скорости по Манглеру; km = Аkвк – коэффициент торможения потока в области затенения килем; kвк = f(sk/Fом, Hk/R) – электрический коэффициент влияния киля на рулевой винт; kv = f(V) – коэффициент влияния режима полета на эффект воздушной подушки. В этой формуле учитывается влияние параметров системы "винт + киль" (Sk/Fом, Hk/R) и режима полета на местный эффект воздушной подушки. Коэффициент kv, определяющий влияние скорости полета (V), принимается таким же, как было получено А.И. Акимовым в летных исследованиях эффекта воздушной подушки на несущем винте вертолета [10]. Коэффициент kвк определяется согласно графику, представленному на рис. 2. Значение постоянного коэффициента "А" в выражении для km, подбиралось путем параметрических расчетов, результаты которых сопоставлялись с данными эксперимента. По изложенному алгоритму была разработана программа расчета индуктивных скоростей рулевого винта в присутствии киля для динамической модели вертолета на пилотажном стенде. 56 В.А. Ивчин После разработки программы расчета были выполнены расчеты характеристик рулевого винта с целью проверки работоспособности программы и правильности заложенных алгоритмов. Для этого был рассмотрен режим установившегося висения, когда рулевой винт работает "на месте". Рассматривался режим с частотой вращения, соответствующей числу Маха концов лопастей М = 0,67 и шагу винта ϕ07 = 9°. Для дальнейшего сопоставления с результатами эксперимента конфигурация системы "винт + киль" была принята такой же, как на вертолете Ми-24, с соответствующими относительными параметрами Sk/Fом и Hk/R. На рис. 3 представлены графики изменения характеристик лопасти рулевого винта в зависимости от ее азимутального положения. Зона затенения рулевого винта килем приближенно располагается в секторе, ограниченном азимутами от 85° до 135°. Как видно из представленных графиков, в зоне затенения киля на лопасти возникают импульсные нагрузки в плоскости тяги. В этом состоит основной вывод о влиянии киля на РВ. Другой вывод состоит в том, что при увеличении шага винта до предельного значения (ϕмах = 26°) влияние местной воздушной подушки от киля практически пропадает. При этом шаге рулевого винта его тяга и маховое движение лопастей в присутствии киля и без него практически совпадают (рис. 3). 700 600 500 fрв= -9 град Тяга лопасти, кг 400 Область затенения fрв= 9 град 300 fрв=18 град 200 fрв=26 град Ср.зн. без киля 100 Ср.зн. с килем 0 -100 -200 -300 0 30 60 90 120 150 180 210 240 270 300 330 360 Угол взмаха, градусы Азимут лопасти, градусы 2.0 fрв= -9 град 1.5 fрв= 9 град fрв= 18 град 1.0 fрв= 26 град без киля 0.5 Область затенения килем 0.0 0 30 60 90 120 150 180 210 240 270 300 330 360 Азимут лопасти, градусы Рис. 3 Это является следствием того, что влияние воздушной подушки киля увеличивает углы атаки сечений лопасти, проходящей над ним. Когда шаг винта имеет максимальное значение, углы атаки сечений лопасти над килем попадают в область срыва, что приводит к падению подъемной силы. Для сравнения влияния киля на шарнирный и карданный винты на рис. 4 представлен совмещенный график махового движения лопасти при шаге винта φош = 9°. Как отмечалось выше, для шарнирного винта ao угол конуса лопастей составляет 0,76° и меньше, чем у карданного винта, конструктивный угол конусности которого составляет 1°. 57 Метод расчета характеристик рулевого винта в присутствии киля на режиме висения Маховое движение лопасти, М=0.67, Fi=9 град. 2.0 Карданный винт 1.5 Шарнирный винт 1.0 0.5 Область затенения килем 0.0 0 30 60 90 120 150 180 210 Азимут лопасти, градусы 240 270 300 330 360 Рис. 4 Следует отметить, что переменная часть махового движения лопастей для двух винтов также отличается. Это связано с тем, что на шарнирном винте каждая лопасть движется самостоятельно, в то время как карданный винт изменяет свою плоскость вращения только по первой гармонике с учетом взаимодействия всех трех лопастей. Под действием импульсного местного воздействия киля ось карданного винта совершает движение по третьей гармонике для трехлопастного винта. На рис. 5 представлены графики, показывающие движение конуса карданного рулевого винта вертолета Ми-24 в присутствии киля. На левом верхнем графике рис. 5 представлено изменение по времени углов наклона оси конуса винта в продольном (a1) и поперечном (b1) направлениях. Начальный момент времени соответствует нулевому отклонению конуса винта в обоих направлениях. Из графика видно, что установившееся положение конуса винта возникает через некоторое время, соответствующее аэродинамическому демпфированию, величина которого составляет n = γ/8, где γ – массовая характеристика лопасти. При принятых для расчетов характеристиках системы "винт + киль" и заданном шаге винта средний расчетный угол наклона конуса винта составляет а1 = 2,5° в продольном направлении и b1 = 2,8° в поперечном направлении. a1, b1, градусы Угол наклона плоскости винта в координатах ве ртолета: a1 и b1 0.6 0.5 0.4 0.3 0.2 0.1 0.0 -0.1 -0.2 -0.3 -0.4 -0.5 -0.6 Наклон плоскости вращения винта, градусы 0.4 o ψ =180 ψ=135o 0.3 a1 b1 0.2 0.1 0.0 1.0 2.0 3.0 Азимут, градусы 4.0 5.0 0.0 o o ψ =270 ψ =90 a1, b1, градусы Изменение коеффициентов махового движ е ния 1 гармоники 0.4 0.3 0.2 0.1 0.0 -0.1 -0.2 -0.3 -0.4 Область затенения килем -0.1 ψ =85o -0.2 a1 b1 -0.3 o ψ =0 0 90 180 Азимут, градусы 270 360 -0.4 -0.4 -0.3 -0.2 -0.1 0.0 0.1 0.2 0.3 0.4 Рис. 5 Присутствие киля и конечное число лопастей, равное 3, приводит к тому, что при прохождении каждой лопасти над областью затенения килем возникает импульс подъемной силы, приводящий к периодическому изменению среднего положения оси конуса винта. На нижнем левом графике рис. 5 показано изменение углов наклона конуса винта за один оборот винта при установившемся режиме работы винта. Из графика видно, что имеется периодическое изменение угла наклона конуса винта, кратное числу лопастей. Амплитуда колеба- 58 В.А. Ивчин ний лопастей оси винта при данных условиях расчета составляет величину 0,05° ÷ 0,06°, в то время как среднее суммарное отклонение конуса составляет ≈ 0,35°. На правом графике рис. 5 показан годограф движения оси конуса винта в координатах, связанных с килевой балкой вертолета. На графике отмечена расчетная область затенения рулевого винта килем, которая лежит в диапазоне азимутальных углов 85° ÷ 135°. Из графика видно, что среднее отклонение оси конуса винта составляет около 90° по отношению к азимутальному положению возмущения со стороны киля. Это соответствует положениям теории шарнирных винтов и является подтверждением правильности методики расчетов и программы интегрирования махового движения лопастей. Если рассматривать суммарные нагрузки на валу рулевого винта, то можно видеть их изменение с частотой, кратной числу лопастей, в зависимости от азимутального положения. На рис. 6 представлены такие графики. Из графиков видно, что нагрузки на валу рулевого винта имеют практически импульсный характер, причем импульсы нагрузок возникают в моменты нахождения одной из лопастей над килем. Амплитуда импульсной нагрузки зависит от режима работы винта и составляет 4 % ÷ 6 % от средних значений нагрузок для "тянущего" винта и 1,5 % ÷ 3 % для "толкающего". Тяга винта, кг; М=0.67, Fi=9 град. 750 700 650 600 550 0 30 60 90 120 150 180 210 Азимут лопасти, градусы 240 270 300 330 360 270 300 330 360 240 270 300 330 360 240 270 300 330 360 Мощность на валу винта, лс; М=0.67, Fi=9 град. 200 190 180 170 160 0 30 60 90 120 150 180 210 Азимут лопасти, градусы 240 Усилие на штоке, кг; М=0.67, Fi=9 град. -250 -300 -350 0 30 60 90 120 150 180 210 Азимут лопасти, градусы Сила на киле, кг; М=0.67, Fi=9 град. -70 -80 -90 -100 0 30 60 90 120 150 180 210 Азимут лопасти, градусы Рис. 6 Из графика также видно, что сила на киле носит периодический характер, изменяющийся в соответствии с прохождением каждой лопасти над ним, при этом среднее значение силы на киле составляет ≈ 90 кгс, а амплитуда переменной части – ± 8 кгс. Разработанный алгоритм и программа были введены в математическую модель на пилотажном стенде. Было выполнено моделирование различных режимов полета вертолета для оценки работы программы и анализа полученных результатов по характеристикам рулевого винта. Первоначально был рассмотрен режим работы рулевого винта в присутствии киля "на месте", чтобы получить данные для сравнения с эквивалентным режимом, полученным на винтовом стенде. Режим моделировался путем очень медленного изменения шага винта от минимального (–10°) до максимального значения (+26°), для того чтобы избежать переходного процесса при изменении шага винта. 59 Метод расчета характеристик рулевого винта в присутствии киля на режиме висения На рис. 7 представлены результаты моделирования в виде статических зависимостей коэффициентов сТ/σ и mК/σ рулевого винта для изолированного винта и винта, работающего в присутствии киля. На этом же рисунке также представлены данные, полученные при натурном моделировании рулевого винта и киля на винтовом стенде МВЗ. Тянущий винт, М=0.65. Тянущий винт, М=0.65. 0.35 0.10 эксперимент, без киля эксперимент, с килем 0.30 расчет, с килем 0.08 0.25 расчет, без киля 0.20 0.06 ty Mk 0.15 0.10 0.04 0.05 эксперимент, без киля 0.00 0.02 эксперимент, с килем -0.05 расчет, c килем расчет, без киля 0.00 -0.10 -10 -5 0 5 10 15 20 Угол установки, градусы 25 -10 30 -5 0 5 10 15 20 Угол установки, градусы 25 30 Рис. 7 Из сопоставления графиков видно, что получена хорошая сходимость расчетов с результатами эксперимента. Из расчетных графиков видно, что при максимальном шаге винта (+26°) благоприятное влияние киля на винт уменьшается вследствие увеличения области срыва на лопасти при ее прохождении над килем. Следует отметить, что расчетные графики показывают наличие переменной составляющей тяги и крутящего момента на валу винта. В эксперименте производилась регистрация только средних величин тяги и крутящего момента винта, поэтому данные об экспериментальных переменных величинах отсутствуют. На рис. 8 представлены зависимости тяги для системы "винт + киль", изолированного винта и винта в присутствии киля от скорости бокового перемещения вертолета. Vx=0, М =0.65, ϕ =9 o 1400 Винт в присутств ии киля 1200 система "в инт +киль" 1000 изолиров анный в инт киль Тяга, кг 800 600 400 200 0 -200 -400 Пе реме ще ние ВПРАВО -600 -40 -35 -30 -25 -20 -15 -10 -5 Пе ре ме ще ние ВЛЕВО 0 5 Vz, м/с Рис. 8 10 15 20 25 30 35 40 60 В.А. Ивчин Здесь же представлен график изменения силы на киле в зависимости от скорости и направления перемещения вертолета. Рассматривался случай бокового перемещения вертолета в обе стороны до скорости 150 км/ч при шаге винта 9°. ЛИТЕРАТУРА 1. Грингауз М.А., Ивчин В.А. Экспериментальное исследование взаимовлияния киля и хвостового винта на режиме висения на натурном аэродинамическом стенде // Труды 7 форума Российского вертолетного общества. – М., 2006. 2. Крицкий Б.С., Полуянов В.А. Численное моделирование взаимного влияния вертолетного рулевого винта и киля // Труды 5 форума Российского вертолетного общества. – М., 2002. 3. Mangler K.W., Squire H.B. The Induced Velocity Field of a Rotor. "ARC RSM", 1953, No. 2642. 4. Теория несущего винта; Под ред. А.К. Мартынова. – М.: Машиностроение, 1973. 5. Stepniewski W.Z., Keys C.N. Rotary – Wing Aerodynamics, Dover Publications, Inc, New York, 1984, Dover No. 0-486-64647-5. 6. Ивчин В.А., Черток О.Л. Разработка математической модели рулевого винта для исследований на пилотажном стенде динамических характеристик вертолетов при различных условиях полета // Труды 7 форума Российского вертолетного общества. – М., 2006. 7. Миль М.Л. и др. Вертолеты. Расчет и проектирование. Т.2. – М.: Машиностроение, 1967. 8. Антропов В.Ф. Экспериментальные исследования аэродинамических характеристик модели несущего винта на режимах крутого планирования (α = 40° ÷ 90°) // Технический отчет ЦАГИ. – М., 1980. 9. Тябрисова Н.У., Ивчин В.А. Математическое моделирование индуктивных скоростей при положительных углах атаки несущего винта и расчет границы "вихревого кольца" // Труды опытно конструкторского бюро №13, МВЗ им. М.Л. Миля. – М., 1997. 10. Акимов А.И. и др. Летные испытания вертолета – М.: Машиностроение, 1980. METHOD OF CALCULATING TAIL ROTOR HOVER PERFORMANCE WITH DUE ACCOUNT OF THE VERTICAL STABILISER Ivchin V.A. This article represents method of analysis the tail rotor performance with keel influence. Method is based on vortices theory and experiential research of interaction tail rotor and keel. This experimental data shows that tail rotor interacts with keel the same way as the main rotor interacts with ground. This article shows the coincidence result of analysis by represented method and experimental data. Also article shows that keel affect taking in account causes fluctuation load on tail rotor shaft and flapping motion bloods at hovering. Сведения об авторе Ивчин Валерий Андреевич, 1951 г.р., окончил МАИ (1974), кандидат технических наук, начальник отдела аэродинамики и динамики вертолета ОАО "Московский вертолетный завод им. М.Л. Миля", автор более 20 научных работ, область научных интересов – аэродинамика, динамика вертолета, математическое моделирование вертолета на пилотажных стендах, экспериментальные исследования аэродинамики винтов вертолета.