Теоретические основы автоматики. Контрольная работа. Задача 1 Линеаризация статической характеристики объекта управления
advertisement

(...В представленной на сайте версии работы изменены числовые данные. Для получения
работы с корректными величинами, обратитесь на www.diplomant-spb.ru ...)
Теоретические основы автоматики. Контрольная работа.
Задача 1
Линеаризация статической характеристики объекта управления
Объектом управления является трубчатый подогреватель, статическая
характеристика которого описывается нелинейным уравнением
ABG
CG
(1)
где G – расход теплоносителя (входная величина), т/ч, – температура
нагретой жидкости (выходная величина), С, A, B, C – константы.
Необходимо:
1. Найти линеаризованное уравнение статической характеристики в
окрестности точки исходного равновесного состояния при G0 20т/ч.
2. Построить график исходной и линеаризованной зависимостей.
3. Найти ошибку линеаризации на границах участка, ограниченного
отклонениями исходного параметра на величину D, т/ч, от исходной
рабочей точки.
Исходные данные для расчета:
A 770
B 190
C 37
D6
Решение
Линеаризация уравнения – это замена точного нелинейного уравнения
y f (x) приближенным линейным yл fл(x) . Для удобства обозначим y ,
x G . Точка исходного равновесного режима характеризуется параметрами
x
G
20
т/чи y
80
.175
C
0
0
0
0
.
Для линеаризации заданной аналитически нелинейной зависимости y f (x)
ее раскладывают в ряд Тейлора для точки исходного равновесного состояния
x1
(
n
)
f
(
x
)
f
(
x
) 2
f
(
x
) n
0
0
0
y
f
(
x
)
f
(
x
)
(
x
x
)
(
x
x
)
...
(
x
x
)
0
0
0
0
1
!
2
!
n
!
(...В представленной на сайте версии работы изменены числовые данные. Для получения
работы с корректными величинами, обратитесь на www.diplomant-spb.ru ...)
и приближенно заменяют f(x) двумя первыми членами этого ряда.
f
(
x
)
y
f
(
x
)
f
(
x
)
0
(
x
x
)
0
0
.
1
!
Таким образом, вместо нелинейной
рассматривать линейную зависимость
зависимости
y f (x)
y
f
(
x
)
f
(
x
)
f
(
x
)(
x
x
)
л
л
0
0
0
.
будем
(1)
Это уравнение может быть преобразовано в уравнение прямой вида
yл kxb,
f(
x
)
f(
x
)
x
0
0
0
где k f(x0) , b
.
Найдем производную
'
A
Bx
f
(
x
)
0
.
x
C
x
x
0
A
Bx
C
x
)
B
(
A
Bx
)
(
2
C
x
(
C
x
)
Подставив заданные значения параметров A, B, C и
x x0 ,
получим
(
37
20
)
190
(
770
190
20
)
f
(
x
)
1
.
927
0
2
(
37
20
)
b
80
.
175
1
.
927
20
41
.
641
Тогда линеаризованное уравнение принимает вид
y
1
.
927
x
41
.
641
л
(1)
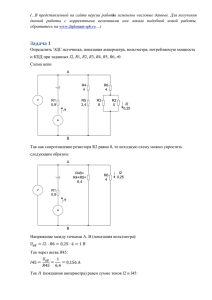
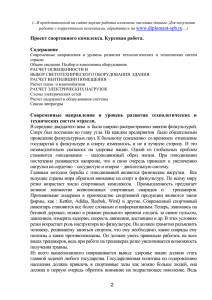
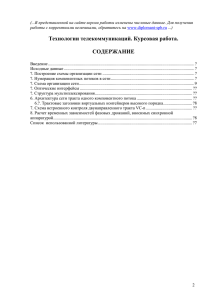
Построим по формулам (1) и (1) графики исходной нелинейной зависимости
(кривая 1) и линеаризованной (кривая 1), приведенные на рисунке.
(...В представленной на сайте версии работы изменены числовые данные. Для получения
работы с корректными величинами, обратитесь на www.diplomant-spb.ru ...)
Обычно при линеаризации уравнений входные и выходные переменные
представляют в виде отклонений от исходного равновесного состояния, то
есть
yyлy0 и xxx0.
Тогда из уравнения (1) получим
yf(x0)
x
Переход к этому уравнению отражает перенос начала координат из точки 1 в
точку с координатами x1, y1.
Для заданной в задаче зависимости уравнение статической характеристики в
отклонениях имеет вид
y1
.927
x
(1)
Найдем
ошибку
линеаризации
на
границах участка, определенного
т/ч от исходной рабочей точки.
Реальные значения температуры получим из исходного нелинейного
уравнения (1), подставив значения входного параметра 11 т/ч и 11 т/ч. Тогда
соответствующие значения выходного параметра будут
770
190
14
y
67
.
255
C
x
14
37
14
770
190
26
y
90
.
635
C
x
26
37
26
Определим расчетные значения выходного параметра на границах заданного
участка по линеаризованной характеристике. Согласно полученному
уравнению (1) при отклонение входного параметра от исходной точки на
(...В представленной на сайте версии работы изменены числовые данные. Для получения
работы с корректными величинами, обратитесь на www.diplomant-spb.ru ...)
y
11
.560
C
т/ч отклонения выходного параметра составят
. таким
образом, на нижней границе заданного участка получим
y
80
.
175
11
.
560
68
.
615
C
л
x
14
и соответственно на верхней границе
y
80
.
175
11
.
560
91
.
735
C
л
x
26
Тогда ошибка линеаризации составит:
на нижней границе
y
y
68
.
615
67
.
255
1
.
360
C
x
14
л
x
14
x
14
на верхней границе
y
y
91
.
735
90
.
635
1
.
100
C
x
26
л
x
26
x
26
(...В представленной на сайте версии работы изменены числовые данные. Для получения
работы с корректными величинами, обратитесь на www.diplomant-spb.ru ...)
Задача 1
Структурные преобразования и оценка устойчивости линейных САР
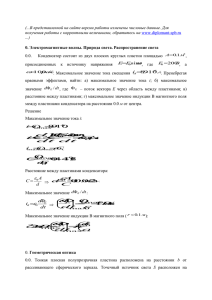
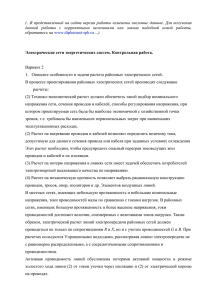
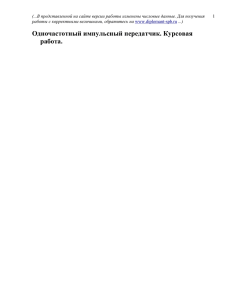
На рисунке показана
регулирования (САР).
структурная
схема
системы
автоматического
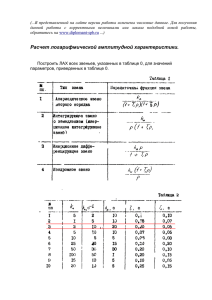
Передаточные функции системы имеют вид:
W
1(p) k1
Усилительное звено
W
2(p)k2p
Дифференцирующее звено
W
3(p) k3
Усилительное звено
k4
W
4(p)
p
Интегрирующее звено
k
5
W
(
p
)
5
(
T
p
1
)(
T
p
1
)
1
2
Инерционное звено второго порядка
Необходимо:
1. Определить передаточную функцию разомкнутой системы.
2. Определить передаточную функцию замкнутой системы по каналу
задающего воздействия g.
3. Определить устойчивость системы.
Исходные данные для расчета:
k1 2.0
k2 3.3
k3 1.4
k4 0.06
k5 1.1
T1 5.1
5
(...В представленной на сайте версии работы изменены числовые данные. Для получения
работы с корректными величинами, обратитесь на www.diplomant-spb.ru ...)
T2 0.52
Решение
1. Получение передаточных функций разомкнутой и замкнутой системы
При последовательном соединении звеньев общая передаточная функция
соединения определяется произведением передаточных функций отдельных
звеньев
n
W
(p
)
W
p
)
i(
i
1
При параллельном соединении на входы всех звеньев поступает один и тот
же сигнал хвх, а выходные сигналы звеньев складываются. В этом случае
передаточная функция всего соединения находится как сумма передаточных
функций отдельных звеньев.
n
W
(p
)
W
p
)
i(
i
1
При соединении с обратной связью на вход звена с передаточной функцией
W1 ( p) одновременно с входным сигналом x вх подается сигнал обратной
связи x ос , полученный на выходе звена с передаточной функцией Wос (p) ,
входным сигналом для которого является x вых . Общая передаточная функция
этого соединения имеет вид
W
(
p
)
1
W
(
p
)
1
W
(
p
)
W
(
p
)
1
ос
когда
x1xвхxос
,
– отрицательной обратной связи, когда
x1xвхxос
.
Важным частным случаем является соединение с единичной отрицательной
обратной связью. При этом Wос(p) 1 и xосxвых. Общая передаточная
функция соединения в этом случае имеет вид
W
(p
)
W
(p
) 1
1
W
(p
)
1
6
(...В представленной на сайте версии работы изменены числовые данные. Для получения
работы с корректными величинами, обратитесь на www.diplomant-spb.ru ...)
Звенья с передаточными функциями W2 (p) , W3 (p) и W4 (p) соединены
параллельно, следовательно, их общая передаточная функция
2
k
p
k
p
k
k
2
3
4
4
W
(
p
)
W
(
p
)
W
(
p
)
W
(
p
)
k
p
k
234
2342
3
p p
Теперь в направлении прямого хода информации имеем цепочку
последовательно включенных звеньев с передаточными функциями W1 (p) ,
W234(p) и W5 ( p) . Общая передаточная функция этой цепи и является
передаточной функцией разомкнутой системы W(p)
2
k
p
k
p
k
k
2
3
4
5
W
(
p
)
W
(
p
)
W
(
p
)
W
(
p
)
k
1
234
5
1
p(
T
p
1
)(
T
p
1
)
1
2
2
k
k
(
k
p
k
p
k
)
1
5
2
3
4
W
(
p
)
p
(
T
p
1
)(
T
p
1
)
1
2
p) используем
выражение для соединения с единичной отрицательной обратной связью.
Тогда
W
(p
)
(p
)
1
W
(p
)
Представим W(p) в виде
A
(p)
W
(p)
B
(p),
где
A ( p)
и
B( p)
– операторные многочлены числителя и знаменателя
W ( p) .
Тогда
A
(
p
)
A
(
p
)
B
(
p
)
(
p
)
A
(
p
) A
(
p
)
B
(
p
)
1
B
(
p
)
Отсюда
2
k
k
k
p
k
k
k
p
k
k
k
1
2
5
1
3
5
1
4
5
(
p
)
3
2
T
T
p
(
T
T
k
k
k
)
p
(
1
k
k
k
)
p
k
k
k
1
2
1
2
1
2
5
1
2
5
1
4
5
Подставив заданные значения коэффициентов и постоянных времени,
получим
2
7
.
260
p
3
.
080
p
0
.
132
(
p
)
3
2
2
.
652
p
12
.
880
p
4
.
080
p
0
.
132
7
(...В представленной на сайте версии работы изменены числовые данные. Для получения
работы с корректными величинами, обратитесь на www.diplomant-spb.ru ...)
1. Оценка устойчивости системы (по критерию Гурвица)
Приравняв к нулю знаменатель выражения (1), найдем характеристическое
уравнение замкнутой системы
3
2
2
.
652
p
12
.
880
p
4
.
080
p
0
.
132
0
Обозначим
a0 2.652
a1 12
.880
a2 4.080
a3 0.132
Все коэффициенты больше нуля.
Определитель Гурвица
a
.
880
0
.
132
0
1a
3 012
a
2
.
652
4
.
080
0
3
0a
20
0a
0 12
.
880
0
.
132
1a
3
Система автоматического регулирования (САР) устойчива, если при
определитель Гурвица и все его диагональные миноры положительны.
a0 0
12
.880
0
1
a
a
12
.
880
0
.
132
1
3
52
.
200
0
2
a
a
.
652
4
.
080
0
22
3a3
20
Система устойчива.
Задача 1
Расчет переходного процесса в линейной системе автоматического
регулирования
Объектом регулирования является бак, наполненный жидкостью.
Регулируемый параметр – уровень H. Возмущающим воздействием,
приводящим к нарушению материального баланса аппарата, а
следовательно, и к отклонению H от заданного значения H зд , является
изменение нагрузки аппарата, т.е. расхода жидкости G p . Уровень
измеряется с помощью датчика LE, автоматический регулятор LC на
основе сравнения текущего значения H с заданным H зд вырабатывает
сигнал
управляющего
воздействия,
который
с
помощью
8
(...В представленной на сайте версии работы изменены числовые данные. Для получения
работы с корректными величинами, обратитесь на www.diplomant-spb.ru ...)
исполнительного механизма ИМ и регулирующего
преобразуется в изменение текущего притока G п .
органа
РО
Вместо текущих значений переменных H, G п и G p удобней
рассматривать их отклонения от некоторых исходных значений.
Обозначим:
yHHзд
– отклонение уровня от заданного значения (y – выходной
параметр),
f G
pG
p0
– отклонение расхода относительно начального значения
(возмущающее воздействие),
uG
пG
п0
– отклонение притока относительно начального значения
(управляющее воздействие),
При указанных обозначениях
управления имеет вид
дифференциальное
уравнение
объекта
dy
T
y
k
u
k
u
ff,
dt
где t – время, T – постоянная времени ОУ, k f – коэффициент передачи
ОУ по каналу возмущения, k u – коэффициент передачи ОУ по каналу
управления.
Предполагается, что возмущающее воздействие имеет вид скачкообразной
функции
f(t0
1(t), const,
где 1(t) – функция единичного скачка, определяемая следующим образом
1 при
t
0
1
(
t)
0 при
t
0
Необходимо:
1. Представить математическую модель ОУ в виде структурной схемы,
определить передаточные функции ОУ по каналам управления и
возмущения.
2. Построить кривую переходного процесса в ОУ при отсутствии
автоматического регулятора (АР) и возмущении f, подаваемом в виде
скачка заданной величины .
3. Найти структурную схему исследуемой САР.
4. Найти передаточную функцию системы по каналу возмущающего
воздействия.
9
(...В представленной на сайте версии работы изменены числовые данные. Для получения
работы с корректными величинами, обратитесь на www.diplomant-spb.ru ...)
5. Построить график переходного процесса в САР при скачкообразном
изменении возмущения на величину .
6. Найти время переходного процесса в объекте без регулятора и в САР.
Исходные данные для расчета:
T9c
2
kf 3
.6c/м
2
ku1
.4c/м
2 3
2
.
1
10
м/с
Тип регулятора: П
kp 2.2
Для упрощения расчетов допускаем, что передаточные функции датчика,
исполнительного механизма и регулирующего органа равны единице.
Решение
1. Анализ объекта управления
Запишем уравнение движения ОУ в операторном виде
(
Tp
1
)
y
(
p
)
k
u
(
p
)
k
f
(
p
)
u
f
,
где y(p), u(p), f(p) – изображения по Лапласу величин y(t), u(t), f(t),
соответственно.
Найдем из этого уравнения изображение выходного параметра
k
k
y
(
p
)
uu
(
p
)
f f
(
p
)
Tp
1
Tp
1
или
y
(
p
)
W
(
p
)
u
(
p
)
W
(
p
)
f
(
p
)
u
f
k
W
) u –
u(p
Tp
1
передаточная функция ОУ по каналу управления,
k
W
) f –
f(p
Tp
1
передаточная функция ОУ по каналу возмущения.
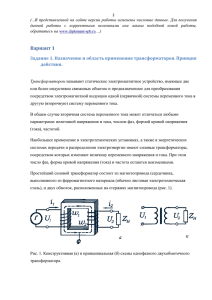
Таким образом, объект может быть представлен в виде структурной схемы
10
(...В представленной на сайте версии работы изменены числовые данные. Для получения
работы с корректными величинами, обратитесь на www.diplomant-spb.ru ...)
Для построения графика переходного процесса в ОУ положим в уравнении
u(p) 0 , получим
y
(
p
)
W
p
)
f(
p
)
f(
Поскольку передаточная функция Wf (p) соответствует типовому
инерционному (апериодическому) звену первого порядка, то при заданном
2
(
t
)
1
(
t
)
2
.
1
10
1
(
t
) переходной процесс
возмущающем воздействии f
может быть найден по известной формуле
t
/
T
2
t
/
9
y
(
t
)
k
(
1
e
)
2
.
1
10
3
.
6
(
1
e
)
f
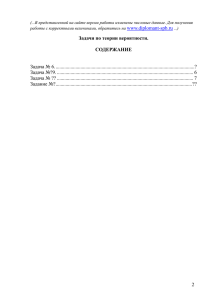
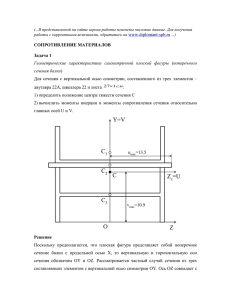
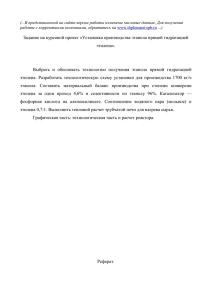
График переходного процесса приведен на рисунке.
Из графика переходного процесса следует, что выходной параметр y
асимптотически приближается к новому установившемуся значению
y
k
0
.
0756
м
уст
f
.
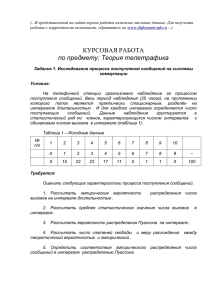
1. Составление структурной схемы и определение передаточной функции
замкнутой системы автоматического регулирования
Структурная схема рассматриваемой САР приведена на рисунке.
11
(...В представленной на сайте версии работы изменены числовые данные. Для получения
работы с корректными величинами, обратитесь на www.diplomant-spb.ru ...)
На схеме изображены объект управления и автоматический регулятор.
Вследствие действия возмущений f возникают отклонения выходного
параметра y. Текущие значения выходного параметра y в элементе сравнения
ЭС сравниваются с задающим воздействием g (т.е. со значением H зд ). В
результате сравнения вычисляется отклонение g y . В зависимости от
величины и знака этого отклонения АР формирует управляющее воздействие
u, действие которого на ОУ противоположно действию возмущающего
воздействия f.
Передаточная функция регулятора имеет следующий вид (П-регулятор)
W
(
p
)
W
(
з
)
k
p
п
p
,
где
kp
– коэффициент усиления регулятора.
В соответствии с рассмотренной структурной схемой найдем передаточную
функцию замкнутой системы по возмущению
k
f
y
(
p
)
W
(
p
)
k
Tp
1
f
(
p
)
f
f
k
f
(
p
)1
W
(
p
)
W
(
p
)1
(
1
k
k
)
u Tp
p
u
p
u
k
p
Tp
1
1. Построение переходного процесса в САР при возмущающем воздействии
Передаточная функция f (p) связывает выходной параметр и возмущающее
воздействие следующим образом
y
(
p
)
p
)
f(
p
).
f(
Возмущающее воздействие задано в следующем виде
f(t)
1(t) .
Ему соответствует изображение
f
(
p
)
L
{
f
(
t
)}
L
{
1
(
t
)}
p
12
(...В представленной на сайте версии работы изменены числовые данные. Для получения
работы с корректными величинами, обратитесь на www.diplomant-spb.ru ...)
Тогда изображение выходного параметра y(p) может быть представлено в
виде следующего выражения
k
b
f
y
(
p
)
,
p
[
Tp
(
1
k
k
)]
p
(
a
p
a
)
p
u
0
1
где b kf ,
a0 T ,
a11kpkf
.
Для отыскания оригинала используем таблицы соответствия, в которых
приведены наиболее встречающиеся оригиналы и соответствующие им
изображения
y(p) к табличному виду представим его как
b
1
y
(p
)
a0 a1
p
pa
0
Тогда оригинал
a
a
1
1
t
b
at
b
a
y
(
t
)
1
e0
1
e0
a
a
1
1
a
0
a
0
Подставив вместо коэффициентов а1, а1, b параметры системы, получим
1
k
k
p
u
k
T t
f
y
(
t
)
1
e
1
k
k
p
u
График переходного процесса приведен на рисунке
13
(...В представленной на сайте версии работы изменены числовые данные. Для получения
работы с корректными величинами, обратитесь на www.diplomant-spb.ru ...)
1. Определение длительности переходных процессов
Время переходного процесса t п определяется как время, в течение которого
после момента подачи возмущающего воздействия выходной параметр y(t)
будет отличаться от нового установившегося значения на заранее
yyуст
Обычно принимают
нового
0.05
yОУ
уст
,
установившегося значения, которое равно для объекта
П
0
.0185
м
уст
, для САР с П-регулятором y
), найдем
ОУ
y
0
.0756
м
уст
- для объекта без регулятора
tОУ
п 27с;
- для варианта САР с П-регулятором
П
tп
6.6 с.
1. Заключение
Применение П-регулятора позволило уменьшить время переходного
процесса по сравнению с объектом без регулирования с 17 с до 1.1 с и
уменьшить установившееся значение отклонения выходного параметра в
2
2
(1kpku)
10
м до
1
.85
10
м
раз с 0.56
. Наличие остаточного
отклонения выходного параметра (статической ошибки) является
характерной особенностью систем с объектом рассмотренного типа и Прегулятором. Уменьшить статическую ошибку можно увеличивая
коэффициент передачи регулятора при этом, однако, следует ожидать
увеличение колебательности системы.
14
(...В представленной на сайте версии работы изменены числовые данные. Для получения
работы с корректными величинами, обратитесь на www.diplomant-spb.ru ...)
15