плоскопараллельное движение твердого тела
advertisement

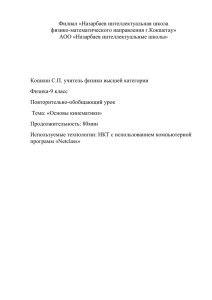
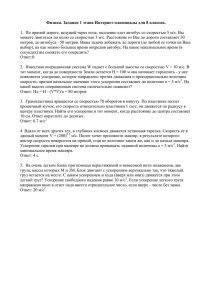
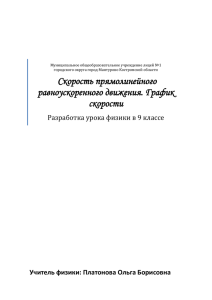
Министерство образования и науки Российской Федерации Государственное образовательное учреждение высшего профессионального образования Уфимский государственный авиационный технический университет ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА Методические указания к решению задач и курсовые задания по теоретической механике Уфа 2012 Министерство образования и науки Российской Федерации Государственное образовательное учреждение высшего профессионального образования Уфимский государственный авиационный технический университет Кафедра теоретической механики ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА Методические указания к решению задач и курсовые задания по теоретической механике Уфа 2012 Составители: С.Т. Ковган, В.М. Горбаненко УДК 531 ББК 22.21 (я7) Плоскопараллельное движение твердого тела: Методические указания к решению задач и курсовые задания по теоретической механике/Уфимск. гос. авиац. техн. ун-т; Сост.: С.Т.Ковган, В.М.Горбаненко. – Уфа, 2012. – 47с. Приведены краткие теоретические сведения по кинематике плоскопараллельного движения твердого тела. Содержат многовариантные курсовые задания и методические рекомендации по их выполнению. Предназначены для студентов, изучающих дисциплину “Теоретическая механика” и обучающихся по направлениям подготовки (специальность) 160700 – “Проектирование авиационных и ракетных двигателей” и бакалавров: 160300 – “Техническая эксплуатация летательных аппаратов и двигателей”, 160700 – “Двигатели летательных аппаратов”, 160100 – “Авиастроение”. Илл.49. Библиогр.: 4 назв Рецензенты: канд. ф.-м. наук, доцент М.М. Шакирьянов канд. техн. наук, доцент В.Ф. Харитонов Уфимский государственный авиационный технический университет, 2012 Составители: КОВГАН Станислав Трофимович ГОРБАНЕНКО Владимир Михайлович ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА Методические указания к решению задач и курсовые задания по теоретической механике Подписано к печати 2012 Формат 6084 1/16 Бумага офсетная. Печать плоская. Гарнитура times New Roman. Усл. печ. л.2,3 . Уч.-изд. л. 2,3. Усл. кр.-отт. 2,3. Тираж 150 экз. Заказ № ГОУ ВПО Уфимский государственный авиационный технический университет Центр оперативной полиграфии 450000, Уфа-центр, ул. К. Маркса, 12 Содержание Стр. Введение………………………………………………......…….......4 1. Краткие теоретические сведения……………….……...............4 2. Основы кинематического расчета плоских механизмов……..7 3. Содержание и методика выполнения задания ………………15 4. Требования к структуре и оформлению задания……………16 5. Варианты задания……………………………………………..17 6. Пример выполнения задания……………………...…………...36 7. Контрольные вопросы………………………………….............47 Список литературы…………………………………….………….47 Введение Настоящее методическое пособие предназначено для самостоятельной работы студентов. Его выполнение отвечает решению задачи формирования у учащихся необходимых компетенций, предусмотренных федеральными государственными образовательными стандартами высшего профессионального образования по направлениям подготовки специалистов 160700 – “Проектирование авиационных и ракетных двигателей” и бакалавров: 160300 – “Техническая эксплуатация летательных аппаратов и двигателей”, 160700 – “Двигатели летательных аппаратов”, 160100 – “Авиастроение”. В содержащихся в пособии заданиях необходимо определить основные кинематические параметры плоского механизма – линейные скорости и ускорения точек и угловые скорости и ускорения звеньев. При этом студенты приобретают навыки кинематического расчета плоских механизмов. Предложено 240 вариантов курсовых заданий. Приведен пример расчета аналогичного курсового задания. 1. Краткие теоретические сведения Плоскопараллельным (плоским) движением твердого тела называется такое движение, при котором все точки тела движутся в плоскостях параллельных некоторой неподвижной плоскости. При таком движении тела любая связанная с ним прямая, перпендикулярная неподвижной плоскости N (на рис.1.1 это, например, прямые А'A'' и B'B''), будет совершать поступательное движение, а значит, все кинематические характеристики точек на этой прямой будут тождественны. Таким образом, для изучения движения всего тела достаточно исследовать, как движется в плоскости Oxy, параллельной плоскости N, сечение этого тела, образующее некоторую плоскую фигуру. y A B x 0 A B N A B Рис.1.1 В свою очередь положение плоской фигуры в плоскости Oxy определяется положением какого-либо отрезка AB на этой фигуре. Анализируя движение этого отрезка в плоскости Oxy можно прийти к выводу о том, что плоское движение это сложное движение, слагающееся из переносного – поступательного вместе с полюсом, и относительного – вращательного вокруг этого полюса. За полюс может быть выбрана любая точка (например, точка A), и от этого будет зависеть поступательная часть движения, вращательная же часть движения от выбора полюса не зависит. В связи с таким представлением движения плоской фигуры, для поиска скоростей и ускорений отдельных ее точек применяются теоремы о сложении скоростей и ускорений, которые в теории плоскопараллельного движения имеют вид: VB V A VBA ; (1.1) WB W A WBA , (1.2) где и – скорость и ускорение полюса – точки А, а и соответственно скорость и ускорение точки B в ее относительном вращении вокруг полюса A (рис.1.2 – 1.3). Вектор направлен перпендикулярно отрезку AB и находится по модулю как VBA ω AB BA, где ωAB времени. (1.3) – угловая скорость плоской фигуры в данный момент A A VA WA AB AB AB VB VA VBA WA WBAn B WBA B Рис.1.2 Рис.1.3 Относительное ускорение касательной составляющих: состоит из нормальной и n W BA W BA W BA , (1.4) где нормальное относительное ускорение всегда положительное и направлено полюсу – точке A: n WBA ω 2AB BA; (1.5) А касательное относительное ускорение может быть как положительным, так и отрицательным и направлено перпендикулярно AB в соответствии с направлением углового ускорения плоской фигуры εAB : τ WBA ε AB BA. (1.6) 2. Основы кинематического расчета плоских механизмов Теория плоскопараллельного движения твердого тела имеет большое прикладное значение, так как в технике существует огромное количество механизмов, в которых все или значительная часть подвижных деталей совершает плоскопараллельное движение. При конструировании механизмов их кинематический расчет является одним из важнейших этапов. Механизмом называется устройство, служащее для преобразования движения. Механизм состоит из звеньев. Звеном называется твердое тело (или несколько неподвижных друг относительно друга твердых тел), входящее в состав механизма. Два соседних звена составляют пару. Звенья пары должны находиться в контакте, т. е. иметь общую точку и иметь возможность двигаться относительно друг друга. Звенья соединяются при помощи шарниров и ползунов. Механизм называется плоским, если точки его звеньев описывают траектории, лежащие в параллельных плоскостях. Каждое звено плоского механизма совершает плоскопараллельное движение. Частными случаями этого плоскопараллельного движения являются вращательное движение вокруг неподвижной оси, поступательное движение в одной плоскости, мгновеннопоступательное движение. Вращательное движение вокруг неподвижной оси Для звеньев, совершающих вращательное движение вокруг неподвижной оси (рис.2.1), кинематическими характеристиками являются угловая скорость О и угловое ускорение О. Точки такого звена (например, точка А) имеют линейную скорость, равную V A 0 R , (2.1) где R = ОА – расстояние от данной точки до центра вращения. Вектор скорости точки А перпендикулярен данному звену и направлен в соответствии с направлением угловой скорости. Ускорение точки вращающегося звена WA состоит из нормальной и касательной (тангенциальной) составляющих (рис. 2.2): W A W An W A , (2.2) которые соответственно равны: W An 02 R ; (2.3) W A 0 R . (2.4) A A WA VA WA n WA 0 Рис.2.1 O 0 0 O Рис.2.2 Вектор нормального ускорения направлен от данной точки к центру вращения. Вектор касательного ускорения перпендикулярен вектору нормального ускорения и совпадает с направлением вектора скорости, если вращение ускоренное, и противоположен вектору скорости, если вращение замедленное. Поступательное плоскопараллельное движение Если звено движется поступательно, то в каждый момент времени все его точки имеют одинаковые по модулю и направлению скорости и ускорения. Например, если в механизме имеется ползун (рис.2.3), движущийся в направляющих, то векторы скорости и ускорения всех точек ползуна направлены вдоль этих направляющих. На рис.2.4 изображен механизм, звенья которого образуют параллелограмм O1ABO2. Звено AB движется поступательно. В любом положении этого звена точки A, B и произвольно выбранная на нем точка M имеют одинаковые скорости и ускорения. VA WA A WA A VA WA Рис.2.3 n o o M VM WM WMn B VB WA O1 WB n O2 Рис.2.4 Общий случай плоскопараллельного движения В общем случае плоскопараллельного движения звена скорости его точек можно находить из векторного равенства (1.1). На практике для нахождения линейных скоростей точек звена вместо равенства (1.1) чаще пользуются полученной из него теоремой о проекциях скоростей, либо выведенном из этого же равенства понятием мгновенного центра скоростей. Теорема о проекциях скоростей: Проекции скоростей двух точек плоской фигуры на прямую, проходящую через эти точки, равны друг другу. легко доказывается путем проецирования векторного равенства (1.1) на прямую AB (рис.1.2): . (2.5) Понятие мгновенного центра скоростей: Мгновенным центром скоростей (МЦС) плоской фигуры, совершающей непоступательное движение (ω≠0), называется связанная геометрически с этой фигурой точка, скорость которой в данный момент времени равна нулю. Если известны направления векторов скоростей двух точек звена, то положение МЦС (обозначим СV)в общем случае определяют, проведя через эти точки перпендикуляры к соответствующим векторам скоростей (рис. 2.5). В точке пересечения этих перпендикуляров и находится МЦС – СV (доказывается с помощью теоремы о проекциях скоростей) Если МЦС взять за полюс, то из соотношений (1.1) и (1.3) будет следовать, что линейные скорости точек фигуры распределяются относительно CV так, как будто фигура вращается вокруг этой точки. По этой причине МЦС еще называют мгновенным центром вращения (Такая аналогия справедлива толь для скоростей, но не для ускорений!). A VA VM M VO O VB AB CV CV Рис.2.6 B Рис.2.5 Для звена AB можно написать универсальное соотношение , (2.6) из которого, например, зная полностью скорость точки A и скорость точки B по – направлению, можно определить угловую скорость звена AB и величину скорости точки B. Если звено представляет собой тело, катящееся без скольжения по поверхности неподвижного тела, то МЦС для этого звена совпадает с точкой касания звена с поверхностью неподвижного тела. Так для фигуры в виде круга (рис.2.6), катящегося без скольжения по прямой, МЦС находиться в точке соприкосновения круга с прямой. Формула, связывающая угловую скорость круга, скорость его центра и, например, скорость произвольной точки на ободе круга, будет выглядеть аналогично предыдущей: , (2.7) В некоторый момент времени звено может занять такое положение, что скорости двух его точек будут параллельны, тогда перпендикуляры к векторам скоростей также будут параллельны. Здесь может быть два случая: 1) Если перпендикуляры к скоростям сливаются в одну прямую, то мгновенный центр скоростей лежит на пересечении этой прямой с прямой, проведенной через концы векторов скоростей данных точек (рис. 2.7 – 2.8). 2) Если перпендикуляры не сливаются в одну прямую (рис.2.9), то СV находится в бесконечности, и из соотношения (2.5) очевидно, что AB=0. На основании теоремы о проекциях скорости всех точек звена равны друг другу. Такое движение звена для данного момента времени называется мгновенно поступательным. Но это определение относится только к скоростям точек звена, ускорения же точек различны: нормальные относительные ускорения точек равны нулю, а касательные относительные различны и нулю не равны, так как не равно нулю угловое ускорение звена. VA A B VA A A VA VB AB CV AB VB B VB B CV Рис.2.7 Рис.2.8 Рис.2.9 Применение теоремы о проекциях скоростей и понятия МЦС иллюстрирует рисунок 2.10, на котором изображен кривошипношатунного механизма – КШМ. Для произвольного положения КШМ угловую скорость шатуна AB и величину скорости ползуна B можно определить, найдя МЦС на пересечении перпендикуляров к скоростям точек A и B и используя затем формулу (2.5), при этом предварительно определяется VA=ωo·OA. Если же предварительно определить углы α и β, то используя (2.5), также можно найти скорость ползуна B. Здесь необходимо напомнить о том, что проекция вектора на прямую – алгебраическая величина, поэтому вектор искомой скорости должен быть направлен так, чтобы проекции скоростей были одного знака. CV AB VA VA A A B o B o O O VB Рис.2.10 VB Рис.2.11 Случай мгновенно-поступательного движения представлен на (рис.2.11) для положения КШМ, когда кривошип OB перпендикулярен направляющей ползуна скорости точек A и B оказываются параллельными, и перпендикуляры к ним не пересекаются. Следовательно, угловая скорость шатуна в данный момент равна нулю, а скорости всех точек шатуна, включая и точку B, одинаковы. Линейные ускорения точек механизма его звеньев находят, как правило, используя (1.2) в виде (2.8) Векторное уравнение (2.8) решается, если содержит не более двух неизвестных, к которым относится как модуль вектора, так и его направление. Проецируя его на координатные оси, получают два алгебраических уравнения, совместное решение которых дает возможность определить две неизвестные величины. В качестве примера рассмотрим диск, имеющий радиус R и катящийся по прямой без скольжения (рис.2.12). Ось диска (точка О) движется в данный момент времени со скоростью VO и ускорением WO. Требуется найти ускорение точки М, находящейся на ободе диска и заданной углом α. Приведем алгоритм решения в символьном виде. y VM WMO M n WMO O WO VO x CV Рис. 2.12 Как уже было показано по известному МЦС определяется угловая скорость диска: (2.9) Пользуясь тем, что расстояние от т. О до CV при качении диска от времени не зависит (OCV=R), а также тем, что точка О движется по прямой, определяем угловое ускорение диска: . (2.10) Взяв за полюс точку О с известным ускорением WO имеем для точки М: , (2.11) где , (2.12) . Проецируя (1.11) на оси, получаем: (2.13) (2.14) (2.15) Окончательно: (2.16) На рисунке вектор не показан, но при необходимости его можно построить по найденным проекциям, отложенным по осям в одинаковых масштабах. Заметим, что воспользоваться формулой (2.10) для нахождения углового ускорения, как это проделано в приведенном примере, можно только при условии, что расстояние от точки с известной скоростью до МЦС не изменяется со временем. В других случаях угловое ускорение звена остается неизвестным, а поэтому для решения уравнения вида (2.8) в проекциях на оси необходимо, чтобы в нем был известен какой либо другой параметр, например, задающий направление искомого ускорения. 3.Содержание и методика выполнения задания 3.1 По заданным угловым и линейным размерам аккуратно в масштабе выполнить чертеж механизма. Масштаб выбирается с условием возможности дополнительных, необходимых для решения, построений 3.2 Начиная от ведущего звена, для которого задано движение, определить линейные скорости всех обозначенных на исходном рисунке точек механизма и угловые скорости всех его звеньев, пользуясь понятием мгновенного центра скоростей. 3.3 С помощью теоремы о проекциях скоростей проверить правильность определения линейных скоростей. 3.4 Переходя последовательно от ведущего звена к звеньям, которым движение передается, написать векторные соотношения между линейными ускорениями всех обозначенных на исходном рисунке точек. 3.5 Спроецировать векторные соотношения на оси и из полученных алгебраических уравнений определить линейные ускорения всех указанных точек механизма и угловые ускорения всех его звеньев. При этом для каждого из векторных соотношений выбрать оптимальные системы координат с точки зрения получения наипростейшего вида уравнений. 4. Требования к структуре и оформлению задания 4.1 Прежде, чем приступить к выполнению задания необходимо проработать два теоретических раздела пособия и, при необходимости, дополнить их, пользуясь конспектом лекций и рекомендованной литературой. 4.2 Номер варианта указывается преподавателем. 4.3 Задание выполняется на стандартных листах формата А4 в соответствии с требованиями ЕСКД. 4.4 Титульный лист оформляется в соответствии с принятым в УГАТУ образцом. На титульном листе должно быть написано название министерства, ВУЗа, кафедры, полностью название задания и его варианты, указаны факультет и группа, фамилии и инициалы студента и преподавателя-консультанта.. 4.5 На второй странице должны быть размещены: условия и исходные данные задачи, взятые из методических указаний рисунок к задаче исходные данные задачи в системе единиц СИ 4.6 Решение должно сопровождаться краткими пояснениями; рисунки, чертежи, графики выполняются в выбранном масштабе. 4.7 Вычисления выполняются с относительной погрешностью, не превышающей 1–2 %. 5. Варианты заданий Ниже приводятся 30 задач с 8 вариантами числовых значений к каждой задаче. Номера задач и варианты назначаются преподавателем. Рисунки к задачам даны в конце раздела. Задача 1 (рисунок 5.1) Ведущее звено – кривошип ОА – вращается вокруг неподвижной оси О, имея в данный момент времени угловую скорость 0=2рад/с и угловое ускорение 0=4рад/c2. Кривошип ОА приводит в движение колесо 1, катящееся без скольжения по неподвижному колесу 2. С колесом 2 в точке В соединен шарнирно стержень ВD, точка D которого движется по горизонтальной прямой, проходящей через центр О. Радиусы колес: R1=20см, R2=10см. № вар. 1 2 3 4 5 6 7 8 70 120 30 50 150 20 45 135 45 45 210 30 60 210 20 120 90 30 150 60 15 120 150 45 Задача 2 (рисунок 5.2) Ведущее звено – кривошип ОА – вращается вокруг неподвижной оси О, имея в данный момент времени угловую скорость 0=2рад/с и угловое ускорение 0=3рад/c2. Ползун D движется по горизонтальной прямой, проходящей через центр О1. ОА=30см, АВ=100см, О1В=80см, ВС=30см. № вар. 1 2 3 4 5 6 7 8 75 120 45 40 150 80 60 45 45 165 60 30 120 45 90 30 20 210 100 30 150 60 120 45 135 30 90 15 90 120 60 30 Задача 3 (рисунок 5.3) Ползун В имеет горизонтальные направляющие. В данный момент времени известны проекции скорости и ускорения точки В на горизонтальную ось Оx : VBx=40см/c WBx= –80см/c2. К звену АВ в точке С прикреплен шарнирно стержень СD, конец которого D движется по вертикальной прямой. АВ=L, ОА=20см, СD=60см, АC= ВC. № вар. L,см 1 20 30 120 2 40 30 90 3 60 45 90 4 30 60 105 5 20 75 80 6 50 30 60 7 60 90 90 8 50 90 90 Задача 4 (рисунок 5.4) Ведущее звено – кривошип ОА – вращается вокруг неподвижной оси О, имея в данный момент времени угловую скорость 0= 2рад/с и угловое ускорение 0= –3рад/c2. Одним из звеньев механизма является жесткий равносторонний треугольник АВС со стороной 60см. Ползун D движется по горизонтальной прямой, проходящей через центр О, а ползун С имеет вертикальные направляющие. ОА=20см, ВD=80см. № вар. 1 2 3 4 5 6 7 8 0 135 30 70 70 50 90 45 150 60 80 30 60 45 45 120 Задача 5 (рисунок 5.5) Ведущее звено – стержень О1С – качается вокруг неподвижной оси О1, имея в данный момент времени угловую скорость 0=1рад/с и угловое ускорение 0=2рад/c2. Ползун В движется по горизонтальной прямой. ОА=30см, О1C=80см, АВ=120см, ВС=40см, h=20см. № вар. 1 2 3 4 5 6 7 8 60 45 90 30 45 45 0 30 30 20 0 45 270 45 120 270 30 90 45 0 120 15 0 60 Задача 6 (рисунок 5.6) Ведущее звено – стержень О1С – качается вокруг неподвижной оси О1, имея в данный момент времени угловую скорость 0=2рад/с и угловое ускорение 0= –4рад/c2 Ползун D движется по горизонтальной прямой, проходящей через центр О. ОА=30см, О1C=80см, АВ=50см, СD=80см, ВС=20см. № вар. 1 2 3 4 5 6 7 8 30 135 120 70 120 50 135 45 60 180 45 45 90 90 60 135 60 75 45 135 90 180 30 45 Задача 7 (рисунок 5.7) Ведущее звено – стержень О1В – качается вокруг неподвижной оси О1 и имеет в данный момент времени угловую скорость 0=2рад/с и угловое ускорение 0= –4рад/c2. Ползун D движется по горизонтальной прямой. ОА=30см, О1В=60см, АВ=60см, h=30см. № вар. 1 2 3 4 5 6 7 8 30 70 15 45 60 30 0 120 45 60 150 30 0 60 30 45 90 20 0 135 30 270 90 45 Задача 8 (рисунок 5.8) Ведущее звено – стержень ОА – вращается вокруг неподвижной оси О, имея в данный момент времени угловую скорость 0 =2рад/с и угловое ускорение 0= –4рад/с2 Ползун D движется по горизонтальной прямой, проходящей через центр О. ОА =20см, CD=60см, АВ=L, AC= CВ. № вар. 1 2 3 4 5 6 7 8 L,см 45 70 60 50 120 70 40 105 80 45 80 60 30 50 75 75 30 90 60 105 50 20 75 60 Задача 9 (рисунок 5.9) Ведущее звено – кривошип ОА планетарного механизма – вращается вокруг неподвижной оси О, имея в данный момент времени угловую скорость 0 =2рад/с и угловое ускорение 0=2рад/с2. Кривошип ОА приводит в движение шатун АВ, который оканчивается шестерней 2, жестко с ним связанной. От шатуна движение передается шестерне 1, имеющей ось О1, и коромыслу ВО1, свободно насаженному на ту же ось. Радиусы шестерен: R1=25см, R2=10см. ОА=10см, АВ=100см (в данный момент времени занимает вертикальное положение). № вар. 1 2 3 4 5 6 7 8 50 80 45 60 30 100 60 45 45 70 40 60 70 120 30 45 Задача 10 (рисунок 5.10) Ведущее звено – кривошип ОА – вращается вокруг неподвижной оси О, имея в данный момент времени угловую скорость 0 =3рад/с и угловое ускорение 0=9рад/с2. Ползун С движется по горизонтальной прямой, проходящей через центр О, а ползун D движется по прямой, проходящей в данный момент времени для данного положения механизма через шарнир В. ОА=10см, О1В=40см, ВС=СD=50см. № вар. 1 2 3 4 5 6 7 8 15 60 30 30 45 45 60 30 15 60 30 45 45 30 60 45 Задача 11 (рисунок 5.11) Ведущее звено – кривошип ОА – вращается вокруг неподвижной оси О, имея в данный момент времени угловую скорость 0=4рад/с и угловое ускорение 0= –4рад/с2. Одним из звеньев механизма является жесткий равносторонний треугольник АВС со стороной 30см. ОА=10см, СD=50см О1В=60см, О2D=40см, h=40см. № вар. 1 2 3 4 5 6 7 8 30 100 45 90 0 150 90 30 20 120 15 100 45 100 60 75 Задача 12 (рисунок 5.12) Ведущее звено – кривошип ОА – вращается вокруг неподвижной оси О, имея в данный момент времени угловую скорость 0=4рад/с и угловое ускорение 0=2рад/с2. Одним из звеньев механизма является жесткий равносторонний треугольник ВСО1 со стороной 20см, который вращается вокруг оси О1. Ползун D движется по вертикальной прямой DО1. Точки О и О1 лежат на горизонтальной прямой. ОА =10см, АВ=50см СD=50см. № вар. 1 2 3 4 5 6 7 8 45 120 50 90 60 60 90 20 180 90 270 0 45 80 60 130 Задача 13 (рисунок 5.13) Ведущее звено – кривошип ОА – вращается вокруг неподвижной оси О, имея в данный момент времени угловую скорость 0=2рад/с и угловое ускорение 0=2рад/с2. Кривошип ОА приводит в движение колесо , катящееся без скольжения по прямолинейному горизонтальному рельсу. Ось колеса В остается на горизонтальной прямой, проходящей через точку О. Радиус колеса R=20см, ОА =20см, АВ=Lсм. № вар. 1 2 3 4 5 6 7 8 L, см 45 150 50 30 120 80 60 45 60 75 60 75 45 150 45 15 180 60 45 120 35 75 60 70 Задача 14 (рисунок 5.14) Ведущее звено – кривошип ОА – вращается вокруг неподвижной оси О, имея в данный момент времени угловую скорость 0=2рад/с и угловое ускорение 0=2рад/с2. Кривошип ОА приводит в движение колесо 2, катящееся без скольжения по неподвижному колесу 1. С колесом 2 в точке В соединен шарнирно стержень ВD, точка D которого движется по вертикальной прямой, проходящей через центр О. В рассматриваемый момент времени точка В лежит на вертикальной прямой, проходящей через точку А. Радиус 2-го колеса – R2=20см, ОА =30см. № вар. 1 2 3 4 5 6 7 8 15 70 30 130 20 60 40 75 50 130 60 100 25 50 30 45 Задача 15 (рисунок 5.15) Ведущее звено – кривошип ОА – вращается вокруг неподвижной оси О, имея в данный момент времени угловую скорость 0=2рад/с и угловое ускорение 0=3рад/с2. Одним из звеньев механизма является жесткий равносторонний треугольник АВС со стороной 20см. Ползун D движется по горизонтальной прямой DО. ОА =10см, О1B =40см, h=10см. № вар. 1 2 3 4 5 6 7 8 30 135 15 15 150 30 50 80 45 70 50 30 0 120 15 90 90 30 300 90 30 0 150 30 Задача 16 (рисунок 5.16) Диск радиусом R катится без скольжения по горизонтальной прямой. Скорость и ускорение его оси С соответственно равны: VС=20см/c, WС=10см/с2. C диском с помощью шарнира D соединена пластина в виде прямоугольного треугольника АВС, которая движется в плоскости чертежа. Вершина А пластины скользит по горизонтальной прямой, по которой катиться диск. R=30см, DC=20см, АВ=а см, АD=b см. № вар. 1 2 3 4 5 6 7 8 a,см b,см 120 100 70 60 90 80 75 50 100 135 70 70 15 50 90 150 60 100 15 50 125 40 40 80 Задача 17 (рисунок 5.17) Ведущее звено – кривошип ОА – вращается вокруг неподвижной оси О, имея в данный момент времени угловую скорость 0=2рад/с и угловое ускорение 0=–4рад/с2. ОА =10см, ВС= DЕ=40см, ВD =60см, h=50см. № вар. 1 2 3 4 5 6 7 8 15 30 45 60 75 0 90 20 Задача 18 (рисунок 5.18) Ведущее звено – кривошип ОА – вращается вокруг неподвижной оси О, имея в данный момент времени угловую скорость 0=2рад/с и угловое ускорение 0=3рад/с2. Кривошип приводит в движение прямоугольную пластину АВСD, у которой точки В и Е скользят по двум взаимно перпендикулярным осям O x и Oy. ОА =АВ=АЕ=30см, ВС=DЕ=40см. № вар. 1 2 3 4 5 6 7 8 15 30 45 60 75 0 90 20 Задача 19 (рисунок 5.19) Ведущее звено – кривошип ОА – вращается вокруг неподвижной оси О, имея в данный момент времени угловую скорость 0=2рад/с и угловое ускорение 0= –4рад/с2. Ползун B движется по горизонтальной прямой, проходящей через центр О. ОА =20см, АВ=Lсм, СD=60см, DE=20см. № вар. 1 2 3 4 5 6 7 8 30 120 60 90 45 90 60 105 75 30 120 60 80 70 60 105 L,см 30 50 45 40 45 60 75 35 60 50 45 70 110 60 75 40 Задача 20 (рисунок 5.20) Ведущее звено – кривошип ОА – вращается вокруг неподвижной оси О, имея в данный момент времени угловую скорость 0=2рад/с и угловое ускорение 0=4рад/с2. Кривошип ОА приводит в движение колесо 2 , катящееся без скольжения внутри неподвижного колеса 1. С колесом 2 в точке В соединен шарнирно стержень ВС, точка С которого движется по горизонтальной прямой, проходящей через центр О. Радиус 2-го колеса R2=20см, ОА =30см. № вар. 1 2 3 4 5 6 7 8 30 70 15 60 110 45 120 35 30 75 90 15 75 120 15 90 50 60 90 125 45 45 90 30 Задача 21 (рисунок 5.21) Ведущее звено – кривошип ОА – вращается вокруг неподвижной оси О, имея в данный момент времени угловую скорость 0=1рад/с и угловое ускорение 0=3рад/с2. Кривошип ОА приводит в движение колесо 2, катящееся без скольжения внутри неподвижного колеса 1. Радиусы колес: R1=80см, R2=20см, ОА =30см, AB =100см, h =20см. № вар. 1 2 3 4 5 6 7 8 30 45 90 60 20 150 270 90 70 60 30 135 0 45 45 120 Задача 22 (рисунок 5.22) Стержень ВО1 имеет в данный момент времени угловую скорость 0=2рад/с и угловое ускорение 0=3рад/с2. Одним из звеньев механизма является жесткий равносторонний треугольник АВС со стороной 40см. Ползун D движется по горизонтальной прямой DО. ОА =30см, О1B =50см, h=50см. № вар. 1 2 3 4 5 6 7 8 45 70 30 50 270 90 90 90 0 120 270 90 45 150 20 80 15 30 30 30 45 50 30 60 Задача 23 (рисунок 5.23) Ведущим звеном механизма является жесткий равносторонний треугольник ВСО1 со стороной 20см. Треугольник, вращаясь вокруг неподвижной оси О1, имеет в данный момент времени угловую скорость 0=2рад/с и угловое ускорение 2 0=3рад/с . Ползун D движется по вертикальной прямой DО1. ОА =20см, АВ=80см, СD=40см. № вар. 1 2 3 4 5 6 7 8 15 60 0 120 60 90 30 90 120 0 270 30 90 30 45 60 Задача 24 (рисунок 5.24) Ведущее звено – ползун В, имеющий горизонтальные направляющие. В данный момент времени известны проекции скорости и ускорения точки В на горизонтальную ось Оx : VBx=60см/c , WBx= –40см/с2. ОА =20см, АВ=100см, О1С=80см, BС=30см, h=20см. № вар. 1 2 3 4 5 6 7 8 60 45 90 0 120 90 45 90 120 30 60 90 270 90 60 90 45 45 45 30 90 75 60 30 Задача 25 (рисунок 5.25) Ведущее звено – балансир ОА планетарного механизма вращается вокруг неподвижной оси О, имея в данный момент времени угловую скорость 0=2рад/с и угловое ускорение 2 0=2рад/с . Балансир ОА приводит в движение шатун АВ оканчивается шестерней 2, жестко с ним связанной. От шатуна движение передается шестерне 1, имеющей ось О1, и кривошипу ВО1, свободно насаженному на ту же ось. Радиусы шестерен: R1=30см, R2=20см. ОА =25см, АВ=100см. № вар. 1 2 3 4 5 6 7 8 β 75 45 90 30 30 60 60 20 45 0 120 15 60 30 45 20 Задача 26 (рисунок 5.26) Ведущее звено – кривошип ОА – вращается вокруг неподвижной оси О, имея в данный момент времени угловую скорость 0=2рад/с и угловое ускорение 0= –2рад/с2. Ползун В движется по горизонтальной прямой. ОА=20см, О1C=90см, АВ=100см, ВС=50см, h=10см. № вар. 1 2 3 4 5 6 7 8 60 30 90 0 120 30 90 90 45 270 90 60 300 60 90 90 90 120 0 120 60 90 60 90 Задача 27 (рисунок 5.27) Ведущее звено – кривошип ОА – вращается вокруг неподвижной оси О, имея в данный момент времени угловую скорость 0=2рад/с и угловое ускорение 0=4рад/с2. Ползун D движется по горизонтальной прямой, проходящей через точку О. ОА =20см, О1В=40см, АВ=50см, h=30см. № вар. 1 2 3 4 5 6 7 8 30 120 30 60 90 45 0 135 30 30 60 60 45 90 60 60 60 30 0 150 30 0 120 60 Задача 28 (рисунок 5.28) Ведущее звено – ползун С, который движется по вертикальной направляющей. С ползуном шарнирно соединена вершина С равностороннего треугольника АВС со стороной 50см. В данный момент времени известны проекции скорости и ускорения точки С на вертикальную ось Оy: VCY= –40см/c WCY=80см/с2. ОА =20см, ВD=60см. № вар. 1 2 3 4 5 6 7 8 30 150 45 60 70 30 0 120 90 30 -90 45 -50 45 40 90 Задача 29 (рисунок 5.29) Стержень О1В, качаясь вокруг неподвижной оси О1, имеет в данный момент времени угловое ускорение 0= –4рад/с2 и угловую скорость 0=2рад/с. Ползун D движется по горизонтальной прямой, проходящей через центр О1. ОА =10см, О1В=60см, СВ=30см. АВ=100см, № вар. 1 2 3 4 5 6 7 8 45 120 120 45 90 90 120 30 135 45 90 15 150 60 60 30 0 210 105 30 45 135 90 60 30 165 120 30 150 30 60 30 Задача 30 (рисунок 59) Ведущее звено – ползун D , имеющий вертикальные направляющие. В данный момент времени известны проекции скорости и ускорения точки B на вертикальную ось Oy: VDY=40см/с, WDY=-60см/с2. Ползун B движется по горизонтальной прямой, проходящей через точки В и О. ОА=40см, AВ=80см, AC=30см, CD=50см . № вар. 1 2 3 4 5 6 7 8 d,см 90 40 120 10 60 50 75 60 100 30 70 10 150 20 45 40 R1 B A 0 0 D 1 O R 2 2 Рис.5.1 01 D 0 0 0 C A B Рис.5.2 Y A C 0 D Рис. 5.3 B x B A 0 D 0 O C Рис.5.4 O1 A 0 B h O 0 C Рис.5.5 O1 O 0 0 D B A C Рис.5.6 A D O B 0 0 h O1 Рис.5.7 A 0 C 0 O B D Рис.5.8 0 0 A O 1 O1 B 2 Рис.5.9 D A 90 ° 0 0 O B C 70 O1 ° Рис.5.10 O1 h C A 0 0 D O 90 O2 B Рис.5.11 A 0 0 D O1 O B Рис.5.12 C ° A M O B 0 0 Рис.5.13 B 1 0 0 A O 2 D Рис.5.14 C A 0 0 O B h O1 Рис.5.15 D B C VC WC 90 o D A Рис.5.16 0 O 0 h A E C D 30 B Рис.5.17 C y B 0 A 0 D x O E Рис.5.18 A 0 C 0 B O E D Рис.5.19 1 2 A O C 0 B 0 Рис.5.20 A 2 O1 0 0 B 90 ° h O M Рис.5.21 1 C A D O B h O1 0 0 Рис.5.22 A D O O1 0 0 C B Рис.5.23 y A 01 x h O B C Рис.5.24 0 A 0 O 90 1 O1 2 B Рис.5.25 A 0 0 O1 O h B C Рис.5.26 A 0 0 D O h B O1 Рис.5.27 B y A x O D C Рис.5.28 O1 0 0 D O C A B Рис.5.29 y D A C O d Рис. 5.30 B x 6. Пример выполнения задания Для изображенного на рисунке 6.1 плоского механизма определить линейные скорости и ускорения точек C и D и угловые скорость и ускорение звена CD (шатун), если ведущее звено (кривошип) O1A вращается с постоянной угловой скоростью ω0 вокруг неподвижной оси O1 против часовой стрелки. Звено в виде равностороннего жесткого треугольника O2BС вращается вокруг неподвижной оси O2 Положение механизма определяется заданными углами и длинами звеньев. Дано: ω0 = 2 рад/c = const; φ = 150°; α = 130°; β = 75°; O1A = 30 см; AB = 100 см; O2B = O2C = BC; CD = 100 см. Рис. 6.1 Решение 6.1 Построение механизма по заданным данным Построим механизм в заданном положении (рисунок 6.2).в масштабе в соответствии с заданными угловыми и линейными размерами. 6.2 Расчет геометрии Значения всех остальных (не заданных) углов и линейных размеров рассчитываем из геометрических соображений. Из равнобедренного треугольника О1АК получим АК = 30 см. Тогда ВК = 70 см. Из треугольника О2ВК по теореме синусов определим О2В = 135,2 см. Тогда О2С так же равно 135,2 см. Из треугольника О2CD по теореме синусов определим, что угол О2DC = 7220. Рис.6.2 6.3 Определение скоростей точек и угловых скоростей звеньев Скорость точки А равна (6.1) Вектор скорости точки А направлен в сторону вращения кривошипа и перпендикулярен кривошипу O1A (рисунок 6.3).С другой стороны, точка А принадлежит и звену АВ, совершающему плоскопараллельное движение. Рис.6.3 Точка В, принадлежащая звену АВ и звену О2ВС, вращается вокруг точки О2. Следовательно, направление вектора скорости точки В известно (вектор скорости точки В перпендикулярен стороне О2В треугольника О2ВС). Мгновенный центр скоростей СV1 для звена АВ найдем на пересечении перпендикуляров к векторам скоростей точек А и В, проведенных через эти точки. При этом плоскопараллельное движение звена АВ можно представить как мгновенное вращение вокруг МЦС с мгновенной угловой скоростью равной (6.2) Тогда скорость точки В найдем в виде (6.3 Величины АСV1 и ВСV1 можно определить по теореме синусов из треугольника АВСV1. Тогда получим (6.4) Откуда АСV1=272,4см, а ВСV1=334,6см. В свою очередь точка В принадлежит звену О2ВС, которое вращается вокруг точки О2. Следовательно, угловая скорость звена О2ВС равна (6.5) Так как треугольник О2ВС представляет собой единое жесткое звено, то скорость точки С его можно определить по формуле (6.6) Вектор скорости точки С направлен перпендикулярно стороне О2С треугольника О2ВС. Точка С принадлежит одновременно и звену CD. Вектор скорости точки D, принадлежащей звену CD, направлен вдоль направляющих, по которым движется ползун D. Тогда мгновенный центр скоростей для звена CD будет лежать на пересечении перпендикуляров к векторам скоростей точек C и D, проведенных через эти точки. Из треугольника CDCV2 по теореме синусов найдем (6.7) Откуда получим CCV2 =43 см, DCV2 =126 см, тогда угловая скорость звена DC будет равна (6.8) Скорость точки D найдем по формуле (6.9) 4.4 Определение ускорений точек и угловых ускорений звеньев механизма. Точка А вращается вокруг точки О1. Следовательно, ускорение точки А состоит из нормального и касательного ускорений: (6.10) Так как угловая скорость вращения звена О1А постоянна, то угловое ускорение его 0 равно нулю и касательное ускорение точки А так же равно нулю: , , (6.11) Нормальное ускорение точки А равно W An ωo2 O1 A 2 2 30 120 см/c 2 (6.12) Вектор нормального ускорения точки А направлен от точки А в сторону центра вращения к точке О1 (рисунок 6.4). Ускорение точки В, как точки звена АВ, найдем, приняв за полюс точку А с известным ускорением. Тогда получим: (6.13) где ускорение полюса (точки А), ускорение точки B в ee относительном вращательном движении вокруг полюса A. Ускорение во вращательной части движения состоит из нормального и касательного ускорений. Поэтому , где величина нормального ускорения точки вращательном движении вокруг полюса А равна (6.14) В во n WBA ω 2AB BA 0,222 100 4,84 см/с2 . (6.15) n Вектор W BA направлен вдоль звена АВ от точки В в сторону полюса А - относительного центра вращения. τ n Вектор W BA направлен перпендикулярно вектору W BA . Его величина неизвестна. Предположительно направляем его, как показано на рисунке 6.4, считая, что угловое ускорение BA стержня АВ (дуговая стрелка на рисунке) направлено по ходу часовой стрелки. Рис.6.4 В свою очередь точка В, принадлежащая звену О2ВС, вращается вокруг центра О2. Поэтому ускорение точки В можно представить в виде векторной суммы нормального и касательного ускорений: (6.16) Вектор нормального ускорения точки В равен WBn 2 O2B 0,542 135,2 39,4 см/ c2. (6.17) Вектор W Bτ должен быть направлен перпендикулярно вектору W Bn . Его величина неизвестна. Предполагаем, что треугольное звено О2ВС вращается с угловым ускорением , направленным τ против часовой стрелки, тогда W B будет иметь направление, показанное на рисунке 5.4. Уравнение (6.13), с учетом равенств (6.14), (6.16), представим в виде (6.18) Двумя линиями подчеркнуты полностью известные векторы. Одной линией - векторы известные только по направлению, но не известные по величине. Неизвестные величины векторов можно найти, если спроецировать векторное равенство (6.18) на координатные оси, показанные на рисунке. Тогда получим два алгебраических уравнения с двумя неизвестными n n W BX W BX W AX W BAX W BAX . (6.19) n n W BY W BY W AnY W BAY W BAY . (6..20) Подставляя значения известных векторов и направляющих косинусов, получим систему уравнений с неизвестными величинами WB и W BA : 39,4 cos 45 WBτ cos 45 120cos 60 4 ,84; (6.21) τ 39,4 cos45 WBτ cos45 120cos30 0 WBA . (6.22) Решая уравнения (6.21) и (6.22) получим значения касательных ускорений: WB 131,3см / c 2 ; WBA 224,2см / c 2 . (6.23) Положительные значения найденных величин означает, что направления этих векторов и соответственно угловых ускорений звеньев были выбраны и показаны на рисунке 5.4 правильно. Так как касательные ускорения точки В во вращательном движении вокруг точки О2 и в относительном вращении вокруг точки А по определению равны WBτ ε Δ O2 B, (6.24) τ WBA εBA BA, (6.25) то из этих формул определяем угловые ускорения звеньев W B 131,3 0,97 рад/с 2 , O2 B 135,2 BA (6.26) W BA 224,2 2,24 рад/с 2 . BA 100 (6.27) Таким образом, угловая скорость и угловое ускорение звена О2ВС соответственно равны ω Δ 0,54 рад с ; ε Δ 0,97 рад с 2 . Ускорение точки С, как точки звена О2ВС, вращающегося вокруг точки О2, состоит из нормального и касательного ускорения (рисунок 6.4) WC WCn WC . Нормальное ускорение точки С равно WCn 2 O2C 0,542 135,2 39,4 Касательное ускорение точки С равно (6.28) см / c 2 . (6.29) WC O2C 0,97 135,2 131,1 см / c 2 . (6.30) Точка С одновременно принадлежит звену О2ВС и звену СD. Приняв точку С с найденным ускорением за полюс, получим ускорение точки D в виде . (6.31) где -ускорение точки D во вращательном движении вокруг точки С. Это ускорение также состоит из нормальной и касательной составляющих: . (6.32) Нормальное ускорение во вращательном движении точки D относительно полюса С равно n 2 WDC DC DC 1,702 100 289,0 см / c 2 . (6.33) Касательное ускорение W DC точки D в относительном вращении вокруг полюса C неизвестно по величине. Однако известно, что оно направлено перпендикулярно нормальному n ускорению WDC . Предполагая, что угловое ускорение звена CD направлено против хода часовой стрелки, направляем вектор W DC , как показано на рисунке 6.4. Уравнение (6.31) с учетом равенств (6.28) и (6.32) принимает вид . (6.34) Двумя линиями подчеркнуты векторы ускорений известные по величине и направлению. Одной линией подчеркнуты векторы ускорений, известные по направлению, но неизвестные по величине. Вектор W D должен быть направлен вдоль направляющих ползуна D. Предполагаем, что он направлен, как показано на рисунке 5.4, вниз по направляющим. Проецируя векторное уравнение (4.34) на координатные оси, получаем два алгебраических уравнения с двумя неизвестными: n τ n τ W DX W CX W CX W DCX W DCX ; (6.35) n τ n τ W DY W CY W CY W DCY W DCY . (6.36) Подставляя значения ускорений в уравнения (4.37), получим 0 39,4 cos 450 131,1sin 450 292,4 sin 720 20 WDC cos 720 20 (6.37) Откуда касательное ускорение точки D при ее вращении вокруг полюса С равно τ W DC 520,7 см/с 2 . Подставляя значения ускорений в уравнение (4.38), с учетом найденного значения WDC получим W D 39.4cos45 131,3cos45 - 292,4cos7220 (6.38) (-521,6)sin7220. Из этого уравнения находим 2 W D 519,9 см с . Угловое ускорение звена DC равно ε DC τ W DC - 520,7 5,21 рад 2 . с DC 100 (6.39) Знаки “-”, полученные для трех последних величин, означают, что WDCτ , W D и DC в действительности имеют направления, противоположные направлениям, показанным на рисунке 6.4 6. Контрольные вопросы 1. Какое движение называется плоскопараллельным? 2. Из каких движений складывается плоскопараллельное движение? 3. Частные случаи плоскопараллельного движения? 4. Как связаны скорости двух любых точек тела, совершающего плоскопараллельное движение? 5. Что такое мгновенный центр скоростей? 6. Как находится мгновенный центр скоростей в общем случае плоскопараллельного движения? 7. Частные случаи нахождения мгновенного центра скоростей. 8. Что такое теорема о проекциях скоростей? 9. Какое движение называется мгновенно поступательным? 10. Как связаны ускорения двух любых точек тела, совершающего плоскопараллельное движение? 11. Что такое мгновенный центр ускорений? 12. Как находится мгновенный центр ускорений? 13. Какое движение совершают звенья исследуемого механизма? 14. Определить по величине и направлению скорость точки (указанной преподавателем) исследуемого механизма. 15. Определить по величине и направлению ускорение точки (указанной преподавателем) исследуемого механизма. 16. Показать направление угловой скорости звена (по указанию преподавателя) исследуемого механизма. 17. Показать направление углового ускорения звена (по указанию преподавателя) исследуемого механизма. Список литературы 1. К.С. Колесников. Курс теоретической механики. М., МГТУ им. Н.Э.Баумана, 2005, -736 с. 2. С.М. Тарг. Курс теоретической механики. М., Высшая школа, 2004, -416с. 3. М.И. Бать, Г.Ю. Джанелидзе, А.С. Кельзон. Теоретическая механика в примерах и задачах. Т.1, СПб.:«Лань», 2010, 624с. . 4. Н.И. Никитин. Курс теоретической механики. М., Высшая школа, 2003, -719с