Примеры решения задачи контрольной 2
advertisement

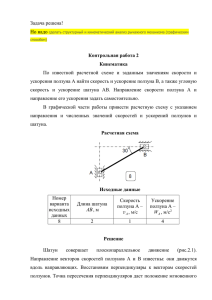
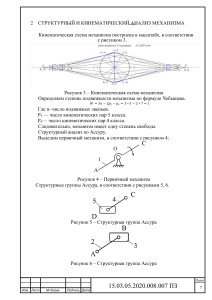
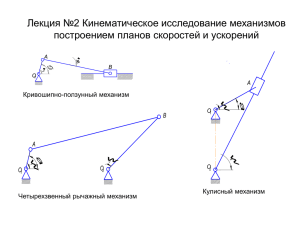
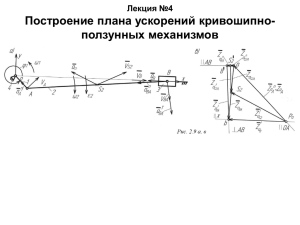
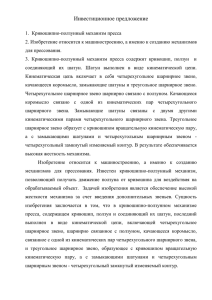
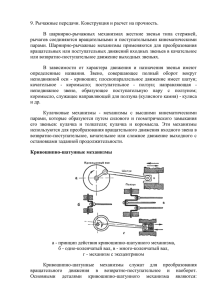
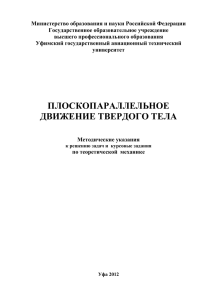
Примеры решения задачи контрольной 2 Пример 1 Кривошипно-ползунный механизм (рис. 1), состоящий из кривошипа ОА, шатуна АВ и ползуна В, совершает движение в плоскости рисунка. Прямая х, по которой движется ползун В, не проходит через ось вращения О кривошипа и в этом случае В х кривошипно-ползунный механизм называют нецентральным. Длины звеньев: ОА = АВ = 1 м, Ползун В движется по закону х = − 10 𝑆𝑖𝑛(𝜋𝑡/6) Механизм изображен в момент времени 𝑡1 = 1𝑐; 𝛼 = 60𝑜 α О А В данном положении механизма определить угловое Рис.1 ускорение 𝜀𝑧ОА кривошипа ОА. Решение. Найдем ускорение 𝑾В ползуна В. В проекции на ось x 𝜋2 πt 𝑊𝐵𝑥 = 𝑥̈ = 10 𝑆𝑖𝑛 ( ) = 1,36 м/с2 36 6 𝑡=𝑡1 Направление вектора 𝑾В определяется знаком проекции. Изобразим все составляющие ос ̃вр ускорений. 𝑾ос АВ - к полюсу В. 𝑾А - к полюсу О. 𝑾А – произвольно, но ̃вр перпендикулярно ОА. 𝑾 АВ – произвольно, но 𝑾 В В перпендикулярно АВ. х ̃𝐴вр 𝑾 ос 𝑾𝐴В α А 𝑾𝐴ос вр ̃𝐴В 𝑾 О Рис.3 Случайность выбора направления вращательных ускорений обозначено волной над буквой. Это значит, что вычисленные значения этих ускорений могут быть отрицательными. В этом случае ускорения направлены противоположно изображенным. Выразим ускорение шарнира А через ускорение полюса В вр ос ̃𝐴вр + 𝑾𝐴ос = 𝑾𝐵 + 𝑾 ̃𝐴𝐵 𝑾 + 𝑾𝐴𝐵 (1) вр ̃𝐴вр и 𝑊 ̃𝐴𝐵 В этом уравнении две неизвестные: 𝑊 . Искомое угловое ускорение 𝜀𝑧ОА входит в вр ̃𝐴 𝑾 ̃𝐴вр = 𝜀𝑂𝐴 𝑂𝐴 𝑊 ̃вр Чтобы избавиться от неизвестной 𝑾 𝑨𝑩 проектируем (1) на АВ: вр ос ̃𝐴 𝑆𝑖𝑛𝛼 + 𝑊𝐴ос 𝐶𝑜𝑠𝛼 = 𝑊𝐵 𝐶𝑜𝑠𝛼 + 𝑊𝐴𝐵 𝑊 Отсюда ̃𝐴вр = 𝑊 1 ос (WB Cosα + 𝑊𝐴𝐵 − 𝑊𝐴ос 𝐶𝑜𝑠α) 𝑆𝑖𝑛α Где м ос ; 𝑊𝐴𝐵 = 𝜔AB 2 AB; 𝑊𝐴ос = 𝜔OA 2 ОА с2 Найдем неизвестные пока модули угловых скоростей ω𝐴𝐵 и ω𝑂𝐴 WB = 1,36 Стержень АВ совершает плоское движение, поэтому 𝜔AB = 𝑉𝐵 BP Где Р- мгновенный центр скоростей стержня АВ. В VB х Чтобы найти Р, определим скорость 𝑽𝐵 π 𝜋𝑡 𝑉𝐵𝑥 = 𝑥̇ = −10 Cos ( ) = −4,53 м/с 6 6 𝑡=𝑡1 α ωOA О Знак минус указывает на то, что вектор 𝑽𝐵 направлен против оси А P ω AB x (Рис.2). Значит скорость 𝑽А направлена вертикально вниз, и VA Рис.2 мгновенный центр Р находится на пересечении перпендикуляров к скоростям 𝑽𝐵 и 𝑽А . Стержень АВ в данный момент вращается против часовой стрелки вокруг Р 𝑉𝐵 4,53 = = 5,17 c −1 ABSinα 0,87 Шарнир А принадлежит обоим стержням. Поэтому модуль его скорости равен 𝜔𝐴𝐵 = 𝑉А = 𝜔AB AP = 𝜔ОА ОА Отсюда ωОА = ωAB 𝐴𝑃 𝐴𝐵𝐶𝑜𝑠𝛼 0,5 = ωAB = 5,17 = 2,58 c −1 OA OA 1 Теперь ос 𝑊𝐴𝐵 = ω𝐴𝐵 2 𝐴𝐵 = 26,72 м ; с2 𝑊𝐴ос = ω𝑂𝐴 2 ОА = 6,66 м с2 1 1 м ос ] [(WB − 𝑊𝐴ос )Cosα + 𝑊𝐴𝐵 = 1,15 [ (1,36 − 6,66) + 26,72] = 27,68 2 𝑆𝑖𝑛α 2 с вр ̃𝐴 означает, что на Рис.2 выбрано правильное направление Положительность 𝑊 ускорения: ̃𝐴вр = 𝑊 ̃𝐴вр = 𝑊𝐴вр 𝑊 Видим, что искомое угловое ускорение εOA направлено по часовой стрелке и равно по модулю вр εOA 𝑊 = 𝐴 = 27,68 с−2 OA Матричный способ Столбец проекций ускорения ползуна В в данном положении 1,36 𝑥̈ 𝑊𝐵 = ( ) =( ) м/с2 В 0 y α О х А + 0 Соотношение ускорений в данном положении 𝑊𝐴 = 𝑊𝐵 + 𝑊𝐴𝐵 В развернутом виде Рис.1 ℰ𝑧𝑂𝐴 𝑡=𝑡1 Ω2OA (ℰ𝑧𝑂𝐴 + Ω2OA )(𝑂𝐴) = 𝑊𝐵 + (ℰ𝑧𝐴𝐵 + Ω2AB )(𝐵𝐴) 2 −𝜔𝑂𝐴 = ( 𝑂𝐴 𝜀𝑧 −𝜀𝑧𝑂𝐴 2 ); −𝜔𝑂𝐴 −𝑂𝐴 −1 𝑂𝐴 = ( )=( ) 0 0 ℰ𝑧𝐴𝐵 + Ω2AB Подставляя, получаем 2 −𝜔𝑂𝐴 ( 𝑂𝐴 𝜀𝑧 2 −𝜔𝐴𝐵 = ( 𝐴𝐵 𝜀𝑧 −𝜀𝑧𝐴𝐵 2 ); −𝜔𝐴𝐵 −0,5 −𝐴𝐵𝐶𝑜𝑠𝛼 𝐵𝐴 = ( )=( ) −0,87 −𝐴𝐵𝑆𝑖𝑛𝛼 2 −𝜀𝑧𝑂𝐴 −1 −𝜔𝐴𝐵 1,36 2 ) ( 0 ) = ( 0 ) + ( 𝐴𝐵 −𝜔𝑂𝐴 𝜀𝑧 Раскрывая, получаем систему −𝜀𝑧𝐴𝐵 −0,5 ) ( ) 2 −0,87 −𝜔𝐴𝐵 2 2 𝜔𝑂𝐴 = 1,36 + 0,5𝜔𝐴𝐵 + 0,87𝜀𝑧𝐴𝐵 2 −𝜀𝑧𝑂𝐴 = −0,5𝜀𝑧𝐴𝐵 + 0,87𝜔𝐴𝐵 Отсюда 𝜀𝑧𝐴𝐵 = 1 2 2 ) (𝜔𝑂𝐴 − 1,36 − 0,5𝜔𝐴𝐵 0,87 0,5 2 2 2 ) 2 2 (𝜔𝑂𝐴 − 1,4 − 0,5𝜔𝐴𝐵 − 0,87𝜔𝐴𝐵 = 0,57𝜔𝑂𝐴 − 1,16𝜔𝐴𝐵 − 0,8 0,87 Чтобы вычислить искомое угловое ускорение 𝜀𝑧𝑂𝐴 найдем угловые скорости ω𝑂𝐴 и ω𝐴𝐵 из 𝜀𝑧𝑂𝐴 = соотношения скоростей 𝑉𝐴 = 𝑉𝐵 + 𝑉𝐴𝐵 ; ΩOA OA = 𝑉𝐵 + ΩAB BA; Матрицы 0 ΩOA = ( OA ωz ΩAB Подставляя, получаем 0 ( OA ωz 0 = ( AB ωz −ωOA z ); 0 −ωAB z ); 0 𝑥̇ −4,5 𝑉𝐵 = ( ) =( ) м/с 0 𝑡=𝑡1 0 −1 𝑂𝐴 = ( ) 0 𝐵𝐴 = ( −ωOA 0 −1 −4,5 z )( ) = ( ) + ( AB 0 0 0 ωz −0,5 ) −0,87 −ωAB −0,5 z )( ) −0,87 0 В развернутом виде 0 = −4,5 + 0,87ωAB z OA AB ωz = 0,5ωz Отсюда получаем ранее найденные значения угловых скоростей −1 ωAB z = 5,17с ; −1 ωOA z = 2,58 c Значения положительны. Значит, оба стержня вращаются против часовой стрелки. Получаем тот же результат 2 2 𝜀𝑧𝑂𝐴 = 0,57𝜔𝑂𝐴 − 0,28𝜔𝐴𝐵 − 0,8 = 0,57 ∙ 6,65 − 1,16 ∙ 26,72 − 0,8 = = 3,79 − 31 − 0,8 = −27,7 c −2 Отрицательное значение указывает на то, что угловое ускорение направлено по часовой стрелке. Пример 2 (формулы) Дано: ОА = АВ = 1м, 𝛼 = 30𝑜 𝜑 = (6/𝜋)𝐶𝑜𝑠(𝜋𝑡/3) Найти 𝜀АВ в данный момент 𝑡1 = 1 сек, Векторный способ 𝜔𝑧𝑂𝐴 = 𝜑̇ = −2𝑆𝑖𝑛 WAoc О , А α WBAbp В WB 3 𝑡=𝑡1 = −√3 𝑐 −1 2𝜋 𝜋𝑡 𝜋 𝐶𝑜𝑠 = − 𝑐 −2 3 3 𝑡=𝑡1 3 м 𝜋м вр 2 = 𝜔𝑂𝐴 𝑂𝐴 = 3 2 ; 𝑊𝐴 = 𝜀𝑂𝐴 𝑂𝐴 = 𝑐 3 𝑐2 вр вр 𝒐𝒄 𝒐𝒄 𝑾𝑩 = 𝑾𝑨 + 𝑾𝑨 + 𝑾𝑩𝑨 + 𝑾𝑩𝑨 𝜀𝑧𝑂𝐴 = 𝜑̈ = − WAbp AB 𝜋𝑡 WBAoc 𝑊𝐴𝑜𝑐 n Проекция на n вр вр 0 = −𝑊𝐴𝑜𝑐 𝑆𝑖𝑛𝛼 + 𝑊𝐴 𝐶𝑜𝑠𝛼 − 𝑊𝐵𝐴 τ вр вр 𝑊𝐵𝐴 = 𝑊𝐴 𝐶𝑜𝑠𝛼 − 𝑊𝐴𝑜𝑐 𝑆𝑖𝑛𝛼 = ( вр 𝜀𝐴𝐵 𝜋 3 м − ) 2 2 √3 2 𝑐 𝑊 𝜋 3 = 𝐵𝐴 = ( − ) 𝑐 −2 𝐴𝐵 2 √3 2 Матричный способ 𝑊𝐵 = (𝜀 + Ω2 )(𝑂𝐴) + (𝜀𝐴𝐵 + ΩAB 2 )(𝐴𝐵) В осях τ, n −𝜑́2̇ 𝜀+Ω =( 𝜑̈ 2 −𝜑̈ ) −𝜑́2̇ 𝑊 𝑊𝐵 = ( 𝐵𝜏 ) 0 𝜀𝐴𝐵 + ΩAB (𝑂𝐴) = ( 2 ́̇ 2 −𝜑𝐴𝐵 =( 𝜑𝐴𝐵 ̈ −𝑂𝐴 𝐶𝑜𝑠𝛼 ) 𝑂𝐴 𝑆𝑖𝑛𝛼 (1) −𝜑𝐴𝐵 ̈ ) ́̇ 2 −𝜑𝐴𝐵 (𝐴𝐵) = ( Раскрывая (1), находим во второй строчке 0 = −𝜑̈ 𝑂𝐴𝐶𝑜𝑠𝛼 − 𝜑́2̇ 𝑂𝐴𝑆𝑖𝑛𝛼 + 𝜑𝐴𝐵 ̈ 𝐴𝐵 Откуда получаем тот же результат 3 π 𝜑𝐴𝐵 ̈ = 𝜑́2̇ 𝑆𝑖𝑛𝛼 + 𝜑̈ 𝐶𝑜𝑠𝛼 = ( − ) 𝑐 −2 > 0 2 2 √3 𝐴𝐵 ) 0