Содержание - ReshimNa5.ru
advertisement

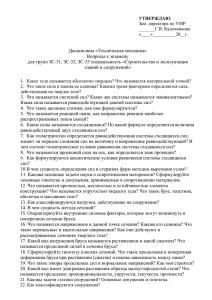
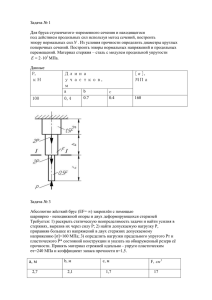
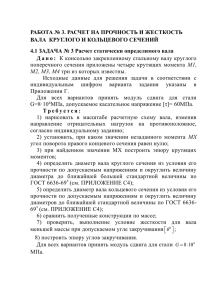
ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ СРЕДНЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ ИРКУТСКИЙ ЭНЕРГЕТИЧЕСКИЙ КОЛЛЕДЖ Техническая механика Методические указания по выполнению практических работ для студентов Иркутского энергетического колледжа, обучающихся по специальностям: 140206 Электрические станции, сети и системы 140203 Релейная защита и автоматизации электроэнергетических систем 140101 Тепловые электрические станции 140102 Теплоснабжение и теплотехническое оборудование Составила: Семенюк Л.А. Рецензент: . Рассмотрено на заседании ЦК Протокол №____от_________2007 г. Председатель ЦК _________________Сухтерева Р.И. 0 ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ СРЕДНЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ ИРКУТСКИЙ ЭНЕРГЕТИЧЕСКИЙ КОЛЛЕДЖ Л.А.Семенюк Методические указания по выполнению практических работ для студентов Иркутского энергетического колледжа, обучающихся по специальностям: 140206 Электрические станции, сети и системы 140203 Релейная защита и автоматизации электроэнергетических систем 140101 Тепловые электрические станции 140102 Теплоснабжение и теплотехническое оборудование Иркутск 2007 1 Содержание Общие методические указания ………………………………………………..……...............2 Определение равнодействующей плоской системы сходящихся сил ….….…....................3 Расчётные схемы балок и определение реакции их опор ……………………......................7 Определение параметров движения твердого тела ……………………..............................12 Работа и мощность.............................................................................................. .....................19 Построение эпюр продольных и нормальных напряжений при растяжении и сжатии, определение перемещений.......................................................................................................23 7. Расчеты на прочность при растяжении и сжатии.................................................................26 8. Построение эпюр крутящих моментов и определение диаметра вала из условий прочности и жесткости при кручении..................................................................................... Приложение А. Пределы прочности некоторых материалов …………………………………..…..31 Приложение Б Образец оформления титульного листа......................................................................32 Перечень рекомендуемой литературы ………………………………………….................................33 1. 2. 3. 4. 5. 6. Общие методические указания «Техническая механика» как учебная дисциплина состоит из «Теоретической механики», «Сопротивления материалов» и «Деталей машин». Основой изучения технической механики является теоретической механика, в которой изучаются общие законы механического движения тел и общие свойства этих движений. Равновесие является частным случаем механического движения. Его изучением занимается статика. В основе статики положены немногочисленные законы и теории, которые находят разнообразное применение. Наиболее эффективным путём изучения статики является не формальное заучивание законов статики, а активное изучение методов решения тех или иных типов практических задач. Методика решения таких задач рассматривается в настоящих методических заданиях. Методические указания содержат теоретическое обоснование, многовариантные задания, последовательность и примеры выполнения работ. Теоретические сведения даются в конспективной форме и должны быть дополнительно изучены на занятиях или по одному из учебных пособий. Основная часть расчетно-графических работ выполняется на практических занятиях, остальная выдаётся для самостоятельной работы в качестве домашних заданий. Многовариантные задания приводятся в конце каждой работы. Номер варианта соответствует списочному номеру в учёбном журнале. По выполненным работам студентами выполняются отчёты. Отчёты должны иметь титульный лист. Образцы отчёта находятся в кабинете технической механики. Решение должно сопровождаться необходимыми объяснениями. Решение приводится сначала в буквенном виде, затем подставляются численные значения. Все вычисления должны выполняться в международной системе СИ. Методические указания могут быть использованы студентами заочной формы обучения для самостоятельного изучения, закрепления знания и выполнения контрольных работ. 2 Практическая работа № 1 Определение равнодействующей плоской системы сходящихся сил Задания Заданы модули сил F1, F2, F3, пересекающихся в одной точке, и направление этих сил – углы α1, α2, α3 относительно оси Х (рис. 1.1 и табл. 1.1) . Цель работы – произвести графическое и аналитическое исследование плоской системы сходящихся сил, выявить уравновешена ли заданная система сил. Теоретическое обоснование Исследование любой системы сил начинают с определения взаимного расположения сил. Если линии действия всех сил расположены в одной плоскости и пересекаются в одной точке, то они образуют плоскую систему сходящихся сил. Силы, действующие на абсолютно твёрдое тело, допускаются переносить вдоль линии их действия, поэтому сходящиеся силы можно всегда приложить в точке пересечения их линий действия. Последовательно складывая сходящиеся силы, плоскую систему сходящихся сил приводят к одной равнодействующей. Один из главных вопросов при исследовании системы сил – является ли данная система сил уравновешенной или неуравновешенной. Необходимым и достаточным условием уравновешенности системы сходящихся сил является равенство нулю их равнодействующей силы. Материальная точка, к которой приложена уравновешенная система сил, находится в состоянии покоя или прямолинейного равномерного движения. Сложение сил можно произвести двумя способами: графически и аналитически. Графическое сложение плоской системы сходящихся сил производят построением силового многоугольника (рис. 1.2) . Рис. 1.1 Рис.1.2 Для этого из произвольной точки откладывается вектор силы F1, из конца которого откладывается вектор силы F2 и т.д. Равнодействующая сила является замыкающей стороной силового многоугольника. Графический способ позволяет довольно быстро и очень наглядно произвести сложения сил, но точность определения модуля и направления равнодействующей зависит от точности построений. Более точные результаты можно получить, применяя аналитический способ, оснований на вычислении всех заданных сил на оси Х и Y: Fix = Fi* cosαi, Fiy = Fi *sinαi, i = 1… n, (1.1) где Fi – модули заданных сил, α – угол между силой F; и осью х. Затем определяются проекции равнодействующей: F∑ x = ∑Fix, F∑y= ∑Fiy, (1.2) а по ним – модуль равнодействующей: 3 F∑ = F 2 ix Fiy2 (1.3) и направление: α = arctg F F iy (1.4) ix Порядок выполнения работы 1.Для заданной системы сходящихся сил в соответствии с вариантом построить в масштабе силовой многоугольник. Записать выбранный масштаб сил. Измерить линейкой длину вектора равнодействующей и транспортиром угол между равнодействующей и осью х. Учитывая масштаб построения, вычислить модуль равнодействующей силы. 2.Вычислить модуль и направление равнодействующей аналитическим методом проекций. 3.Определить относительные погрешности вычисления модуля и направления равнодействующей. При расхождении более 10% вычисления и построения следует проверить. 4.Сделать вывод об уравновешенности заданной системы сил. 5.Ответить на контрольные вопросы. Контрольные вопросы 1.Как производится графическое сложение сил, приложенных к твёрдому телу в одной точке? Влияет ли порядок сложения векторов при построении силового многоугольника на величину равнодействующей? 2.Каково направление равнодействующей силы в силовом многоугольнике? 3.Можно ли построив силовой многоугольник, сделав вывод об уравновешенности заданной системы? 4.Как определяется проекция силы на ось? В каком случае она равна нулю? 5.Каково аналитическое условие равновесия плоской системы сходящихся сил? 6.В каких случаях следует графический способ определения равнодействующей, а в каких – аналитический? 7.Как можно произвести уравновешивание плоской системы сходящихся сил? Пример выполнения Задание: F1 = 4 Н, α = 90 0 , F2 = 6Н, α2 = 200 0 , F3 = 3H, α3 = 70 0 1. Графическое определение равнодействующей. Выбираем масштаб сил – μF = 0.1 Н/ мм Модуль равнодействующей - Fãð = μF * 1 = 0.1*68 = 6.8, Направление равнодействующей - ãð = 134° 4 2. Аналитическое определение равнодействующей проекции заданных сил на оси х и у: F1x = F1* cosα1= 4*cos 90° = 0; F1y = F1* sin α1 = 4* sin90° = 4 H F2x = F2 * cosα2 = 6* cos 200° = -5.638 H; F2y = F2 * sin α2 = 6* sin 200° = - 1.368 H F3x = F3* cosα3 = 3* cos 70° = 1.026 H ; F3y = F3* sin α3 = 3*sin 70° = 2.819 H Проекции равнодействующей: F∑x = ∑Fix = 0 -5 .638 + 1.026 = - 4.612 H, F∑y =∑Fiy = 4 – 1.368 + 2.819 = 5.451 H, Модуль равнодействующей: F∑ àí = Направление равнодействующей: α àí 2 F x 2 F y 2 4,612 5,4512 = 7.140 H F x 5.451 arctg 130.230 = arctg F y 4.612 3. Относительные погрешности Погрешность вычисления модуля равнодействующей. F F uh F fy F uh * 100% = 6.8 7.140 * 100% = 5,00% 7,140 Погрешность вычисления направления равнодействующей гр ан гр *100% = 134 130,23 *100% = 2,81% 134 Вывод: система является неуравновешенной. Модуль равнодействующей - F∑ ан = 7.140 Н, направление - ан = 130,23°. Относительные погрешности не превышают 5% Литература: 1, С.19 26 : 2, С.47 53 5 Таблица 1.1 № варианта 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 F1 Заданные силы, Н F2 F3 4 1 3 9 8 4 2 3 1 7 2 3 4 5 8 7 6 5 4 3 2 8 1 3 4 5 3 2 6 9 8 6 4 1 7 3 1 4 7 8 8 2 9 7 1 5 3 4 7 5 7 6 7 9 6 2 4 3 5 7 2 9 6 4 9 1 9 5 3 9 5 9 2 8 3 8 9 3 1 6 9 4 8 6 8 9 6 8 3 4 6 Углы между силой и осью х, град α1 α2 α3 45 60 110 20 60 45 150 60 120 150 135 140 20 45 180 210 80 75 60 40 20 135 300 270 90 30 45 120 60 330 135 110 20 210 120 90 240 300 60 45 30 80 200 190 225 130 120 180 140 160 110 210 60 120 150 180 150 180 135 120 315 225 310 90 300 180 270 90 20 330 290 120 270 240 45 30 330 225 220 270 200 330 150 60 270 225 240 300 270 210 Практическая работа № 2 Расчётные схемы балок и определение реакции их опор Задание Задана горизонтальная двух опорная балка. Балка нагружена активными силами: сосредоточенной F, распределенной силой интенсивностью q и парой сил с моментом М (табл.2.1 и рис 2.6). Цель работы – построить расчётную схему балки, составить уравнения равновесия балки, определить реакции ее опор и выявить наиболее нагруженную опору. Теоретическое обоснование Во многих машинах и сооружениях встречаются конструктивные элементы, предназначенные преимущественно для восприятия нагрузок, направленных перпендикулярно их оси. Расчетные схемы таких элементов (валы, части металлоконструкции и др.) могут быть представлены балкой. Балки имеют опорные устройства для передачи усилий и сопряжения с другими элементами. Основными типами опор балок являются шарнирно – подвижная, шарнирно – неподвижная опоры и жесткая заделка. Шарнирно – подвижная опора (рис.2.1,а) допускает поворот балки вокруг оси шарнира и линейное перемещение на незначительное расстояние параллельно опорной плоскости. Точкой приложения опорной реакции является центр шарнира. Направление реакции R – перпендикуляр к опорной поверхности. Шарнирно – неподвижная опора (рис.2.1,6) допускает только поворот балки вокруг оси шарнира. Точкой приложения являются также центр шарнира. Направления реакции здесь неизвестно, оно зависит от нагрузки, приложенной к балке. Поэтому для такой опоры определяются две неизвестные – взаимно перпендикулярные составляющие Rx и Ry опорной реакции. Жесткая заделка (защемление) (рис.2.1,в) не допускает ни линейных перемещений, ни поворота. Неизвестными в данном случае являются не только величина, но и её точка приложения. Таким образом, для определения опорной реакции необходимо найти три неизвестные: составляющие Rx и Ry по осям координат и реактивный момент MR относительно центра тяжести опорного сечения балки. а б в Рис.2.1 Равновесие балки под действием любой системы заданных сил, расположенных в одной плоскости, может быть обеспечено одной жёсткой заделкой или двумя опорами – подвижной и неподвижной. Балки называются соответственно консольными (рис.2.2,а) или двух опорными (рис.2.2,б) а б Рис.2.2 7 На балку действуют заданные силы и пары сил. Силы по способу приложения делятся на распределенные и сосредоточенные. Распределенные нагрузки задаются интенсивно q, Н/м и длиной 1, м. равномерно распределенные нагрузки условно изображаются в виде прямоугольника, в котором параллельные стрелки указывают, в какую сторону действует нагрузка (рис.2.3). В задачах статики равномерно – распределенную нагрузку можно заменять равнодействующей сосредоточенной силой Q, численно равной произведению q*1, приложенной посредине длины и направленной в сторону действия q. Рис.2.3 Рис. 2.4 Сосредоточенные нагрузки приложены на сравнительно небольшой длине, поэтому считается, что они приложены в точке. Если сосредоточенная сила приложена под углом к балке, то для определения реакции опор удобно разложить её на две составляющие – Fx = Fcos α и Fy =F sin α (рис.2.4). Реакции опор балки определяются из условий равновесия плоской системы произвольно расположенных сил. Для плоской системы можно составить три независимых условия равновесия: ∑Fix = 0; ∑Fiy = 0; ∑Mio = 0 или ∑Мia = 0; ∑MiB = 0; ∑MiC = 0 или } (2.1) ∑MiA = 0; ∑MiB = 0; ∑Fix = 0. Где О, А ,В, С – центры моментов. Рационально выбрать такие уравнения равновесия, в каждое из которых входила бы по одной неизвестной реакции. Порядок выполнения работы 1. В соответствии с заданием изобразить балку и действующие заданные силы. Выбрать расположение координатных осей: совместить ось х с балкой, а ось у направить перпендикулярно оси х. 1. Произвести необходимые преобразования: силу, наклоненную к оси балки под углом а, заменить двумя взаимно перпендикулярными составляющими, а равномерно распределенную нагрузку – её равнодействующей. 2. Освободить балку от опор, заменив их действие реакциями опор, направленными вдоль осей координат. 3. Составить уравнения равновесия балки, чтобы решением каждого из трёх уравнений было определение одной из неизвестных реакций опор. 4. Проверить правильность определения реакций опор по уравнению, которое не было использовано для решения задач. 5. Сделать вывод о наиболее нагруженной опоре. 6. Ответить на контрольные вопросы. Контрольные вопросы 1.Сколько независимых уравнений равновесия можно составить для плоской системы параллельных сил? 2.Какие составляющие реакции опор балок возникают в шарнирно – подвижной, шарнирно – неподвижной опорах и жёсткой заделке? 3.Какую точку целесообразно выбрать в качестве центра момента при определении реакций опор? 4.Какая система является статически неопределимой? 8 Пример выполнения 1.Задание: q = 5 H/м, F = 25 H, M = 2 H*м, α = 60° 2.Преобразование заданных сил: Fx = F cos α = 25cos 60° = 12.500H, Fy = F sinα = 25 sin60° = 21.625H Q = q*1 = 5*6 =30 H. Рис.2.5 3.Составим расчётную схему (рис.2.5) 4.Уравнения равновесия и определение реакций опор: а) ∑Mia = 0; -Q *3 – Fy*7.5+ RB* 8.5 – M = 0; Q * 3 Fy * 7.5 M RB = 8.5 30 * 3 21.651 * 7.5 2 29.927 H : 8.5 б) ∑MiB =0: - RAy*8.5 + Q *5.5 + Fy *1 – M = 0: RAy = Q * 5.5 Fy *1 M 8.5 30 * 5.5 21.651 * 7.5 2 21.724 H : 8.5 в) ∑Fix=0: RAx + Fx =0: RAx= - Fx = - 12.500H. 5.Проверка: ∑Fiy = 0; RAy = Q – Fy + RB = 0; 21.724 – 30 – 21.651 + 29.927 = 0; 0 = 0 Вывод: Наиболее нагруженной является опора В – RB =29.927 Н. Нагрузка на опору А – RA = 2 R Ax R Ay 12.5 2 21.724 2 25.063H . 2 Литература: 1, C.35 36; 2, C.97 119. 9 Таблица 2.1 № схемы на рис. 2.6 q , Н/м 1 1 5 40 10 30 2 2 1 60 54 45 3 3 5 80 25 60 4 4 4 10 8 120 5 5 5 50 35 90 6 6 8 12 20 30 7 7 2 50 35 45 8 8 4 18 15 60 9 9 4 15 2 90 10 10 4 50 10 120 11 1 2 25 20 30 12 2 4,5 20 85 45 13 3 2,5 15 10 90 14 4 1 12 10 120 15 5 4,5 35 30 30 16 6 3,5 10 45 45 17 7 4 10 5 60 18 8 6,5 24 20 120 19 9 1,5 40 15 30 20 10 6 65 8 45 21 1 10 16 14 60 22 2 2 25 40 90 23 3 4 30 20 120 24 4 12 16 15 150 25 5 8 25 20 225 26 6 0,5 8 10 270 27 7 6 12 8 30 28 8 10 16 12 60 29 9 1 20 18 120 30 10 2 80 100 45 10 F, Н М, Н м № варианта , град Рис.2.6 1 2 3 4 5 6 7 8 9 10 11 Практическая работа № 3 Определение параметров движения твердого тела Задание Движение груза А задано уравнением y = at 2 + bt + c, где [y] = м, [t] = c. Цель работы – подставив заданные коэффициенты в общее уравнение движения, определить вид движения. Определить скорость и ускорение груза в моменты времени t 1 и t 2 , а также скорость и ускорение точки В на ободе барабана лебедки (рис.3.3 и табл.3.1). Теоретическое обоснование Точки тела движутся по окружностям вокруг неподвижной оси (ось вращения). Закон равномерного вращательного движения: φ = φ 0 + wt. (3.1) t 2 Закон равнопеременного вращательного движения: φ = φ 0 + w 0 t + 2 (3.2) 3 Закон неравномерного вращательного движения: φ = f(t ). Здесь φ – угол поворота тела за время t , рад; w – угловая скорость, рад/с; φ 0 - угол поворота, на который развернулось тело до начала отсчета; w 0 - начальная угловая скорость; ε - угловое ускорение, рад/с 2 Угловая скорость: w = ; w = w 0 + εt; (3.3) Угловое ускорение: ε = . Кинематические графики вращательного движения представлены на рис. 3.1а, б. а б Рис.3.1 Число оборотов вращения тела: z = φ(2π). Угловая скорость вращения: n, об/мин. 2т т w= 60 30 (3.4) Рис.3.2 12 Параметры движения точки вращающегося тела (рис.3.2): v – линейная скорость точки В v = wr, м/с; a t - касательное ускорение точки В (3.5) a t = εr, м/с 2 (3.6) а n - нормальное ускорение точки В а n = w 2 r, м/с 2 (3.7) Порядок выполнения работы 1. Определить вид движения, подставив заданные коэффициенты в общее уравнение движения. 2. Определить уравнения скорости и ускорения груза. 3. Определить полное число оборотов шкива. 4. Определить нормальное и касательное ускорения точки на ободе шкива в указанные моменты времени. 5. Ответить на контрольные вопросы. Контрольные вопросы 1. В чем заключается принцип кинетостатики? 2. Могут ли при поступательном движении тела траектории его точек не прямыми линиями? 3. Равна ли скорость перемещения груза скоростям точек на ободе вращающегося шкива? 4. Как повлияет на скорость груза увеличение диаметра шкива при неизменной угловой скорости? 5. Какое ускорение (касательное или нормальное) характерно для точек вращающегося тела? Пример выполнения Для перемещения груза применена барабанная лебедка, привод которой состоит из электродвигателя 1 и редуктора 2 (понижает угловую скорость вала двигателя до требуемой на барабане). Барабан 3 служит для преобразования вращательного движения в поступательное движение груза. Диаметр барабана d = 0,2 м, а уравнение его вращения φ = 30t + 6t 2 . Для момента времени t 1 = 0,5 с, определить все кинематические характеристики движения барабана, точки на его ободе, а также груза. Направление движения груза – вверх. 1. Определяем кинематические характеристики движения барабана. Угол поворота барабана за время t 1 φ1 = 30*0,5 + 6*0,5 2 = 16,5 рад. Угловая скорость барабана w = = (30t + 6t 2 )´ = 30 + 12t ≠ const – движение неравномерное. При t 1 = 0,5 с получим w 1 = 30 + 12*0,5 = 36 рад/с Угловое ускорение барабана ε = = (30 + 12t)´ = 12 рад/с 2 = const. Так как ускорение положительно и постоянно, то барабан вращается равноускоренно. 2. Кинематические характеристики движения любой точки на ободе барабана, например точки А , определяются через угловые характеристики движения барабана. Для момента времени t 1 получим: расстояние, пройденное точкой s = φ 1 r = 16,5 *0,1 = 1,65 м 13 Скорость точки v 1 = w 1 *r = 36*0,1 = 3,6 м/с; касательное ускорение a t = εr = 12*0,1 = 1,2 м/с 2 ; нормальное ускорение а n = w 2 r = 36 2 *0,1 = 130 м/с 2 . 3. Кинематические характеристики груза равны соответствующим характеристикам любой точки тягового троса, а значит, и точки А, лежащей на ободе барабана. Литература: 1, C.35 36; 2, C.97 119. Таблица 3.1 Вариант 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 а, м/с 2 . 2 0 3 0 3 3 2 0 4 0 0 3 4 2 0 4 0 3 4 2 2 0 3 0 3 3 2 0 4 0 в, м/с Параметр с, м r, м 0 3 4 2 0 4 0 3 4 2 2 0 3 0 3 3 2 0 4 0 2 3 4 3 2 0 3 2 4 4 3 4 0 5 2 0 4 2 0 3 2 3 4 0 2 0 3 2 4 0 0 3 4 2 0 4 0 3 4 2 Рис. 3.3 14 0,2 0,4 0,6 0,8 0,5 0,4 0,3 0,2 0,8 0,6 0,2 0,4 0,6 0,8 0,5 0,4 0,3 0,2 0,8 0,6 0,2 0,4 0,6 0,8 0,5 0,4 0,3 0,2 0,8 0,6 t1 , м 1 2 1 2 1 2 1 2 1 2 2 3 2 3 2 3 2 3 2 3 1 2 1 2 1 2 1 2 1 2 t2 , м 3 4 3 4 3 4 3 4 3 4 3 5 3 5 3 5 3 5 3 5 3 4 3 4 3 5 3 5 3 5 Практическая работа № 4 Работа и мощность. Общие теоремы динамики Задания Скорость кабины лифта массой m изменяется согласно графикам (рис.4.4). Используя принцип Даламбера определить натяжение каната кабины лифта на каждом участке движения. Определить максимальное натяжение каната. По максимальному натяжению каната определить максимальную потребную мощность для подъема груза. По заданной величине КПД механизма определить максимальную мощность двигателя (табл. 4.1). Цель работы – научиться рассчитывать мощность с учетом потерь на трение и сил инерции, определять параметры движения с помощью теорем динамики Теоретическое обоснование Принципом Даламбера называют метод, позволяющий решать задачи динамики приемами статики. Для характеристики действия силы на некотором перемещении точки ее приложения вводят понятие «работа силы». Работа служит мерой действия силы, работа – скалярная величина. Работа постоянной силы. Работа постоянной по модулю и направлению силы при прямолинейном перемещении определяется скалярным произведением вектора силы на вектор перемещения точки ее приложения. A = F S cos ( F , V ) = F S cosα (4.1) Работа силы трения: AFтр = Fтр S cos ( FТР ,V ) = fтр NS cos180 = - fтрNS (4.2) Работа силы, приложенной к вращающемуся твердому телу: А= M z d = A = Mz φ. (4.3) 0 Для характеристики работоспособности и быстроты совершения работы введено понятие мощности Мощность при поступательном движении P=Fυ cos α (4.4) где F- постоянная сила, H; υ – скорость движения, м/с; α- угол между направлениями силы и перемещения. Мощность при вращение P=Mω, (4.5) где М – вращающий момент, Н*м; ω – угловая скорость, рад/с. Коэффициент полезного действия КПД=Рпол/Рзатр (4.6) где Рпол – полезная мощность, Вт; Рзатр – затраченная мощность, Вт. Сила инерции F = - ma (4.7) где а – ускорение точки, м/с; m – масса, кг. Основные уравнения динамики Поступательное движение твёрдого тела: F = ma/ Вращательное движение твёрдого тела: Mz = τε где Mz - суммарный момент внешних сил относительно оси вращения, кг*м; ε – угловое ускорение, рад/с. Порядок выполнения работы 1. Используя принцип Даламбера определить натяжение каната кабины лифта на каждом участке движения. 2. Определить максимальное натяжение каната. 3. По максимальному натяжению каната определить максимальную потребную мощность для подъема груза. 4. По заданной величине КПД механизма определить максимальную мощность двигателя. 5. Ответить на контрольные вопросы. 15 Контрольные вопросы 1. Какие силы называют движущими? 2. Какие силы называют силами сопротивления? 3. Запишите формулы для определения работы при поступательном и вращательном движениях? 4. Можно ли задачи динамики решать с помощью уравнений равновесия? 5. Чему равна работа силы тяжести при горизонтальном перемещении тела? 6. Как изменится кинетическая энергия прямолинейно движущейся точки, если ее скорость увеличится в два раза? Пример выполнения График изменения скорости лифта при подъеме известен (рис.4.1). Масса лифта с грузом 2800 кг. Определить натяжение каната, на котором подвешен лифт на всех участках подъема. Решение 1. Рассмотрим участок 1 – подъем с ускорением. Составим схему сил (рис.4.2). Уравнение равновесия кабины лифта: n F ky 0; T1 G Fин1 0; T1 mg ma1 0 Где Т – натяжение каната; G – сила тяжести; F ин - сила инерции, растягивающая канат. Для определения ускорения на участке 1 учтем, что движение на этом участке равнопеременное, скорость v v0 at; v0 0, Следовательно, ускорение: a1 v1 5 1,25 м / с 2 t1 4 Определяем усилие натяжения каната при подъеме с ускорением 2800(9,81 + 1,25) = 30968 Н; Т 1 = 30,97 кН 2. Рассмотрим участок 2 – равномерный подъем. Ускорение и сила инерции равны нулю. Натяжение каната равно силе тяжести. Т 2 G 0; T2 G mg ; T2 2800 9,81 28kH 3. Участок 3 – подъем с замедлением. Ускорение направлено в сторону, обратную направлению подъема. Составим схему сил (рис.4.3) Уравнение равновесия: Fин3 T3 G 0 , отсюда T3 G Fин3 mg ma3 Ускорение (замедление) на этом участке определяется с учетом того, что v = 0. v 0 a3 t 3 0 ; a3 v0 5 м / с2 t3 6 Натяжение каната при замедлении до остановки: 5 T3 2800(9,81 ) 25144 H ; T3 25,14kH 6 Таким образом, натяжение каната меняется при каждом подъеме и опускании, канат выходит из строя в результате усталости материала. Работоспособность зависит от времени. Рис.4.1 Рис.4.2 16 Рис.4.3 Рис. 4.4 1 2 3 4 5 6 7 8 9 10 17 Таблица 4.1 Вариант 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 Масса, кг 500 700 750 800 600 800 600 450 900 850 500 550 600 650 700 750 800 850 900 850 800 750 700 650 600 550 500 450 500 600 Параметр КПД механизма 0,70 0,75 0,80 0,85 0,70 0,75 0,80 0,85 0,70 0,75 0,80 0,85 0,70 0,75 0,80 0,85 0,70 0,75 0,80 0,85 0,70 0,75 0,80 0,85 0,70 0,75 0,80 0,85 0,70 0,75 18 Рисунок 1 2 3 4 5 6 7 8 9 10 1 2 3 4 5 6 7 8 9 10 1 2 3 4 5 6 7 8 9 10 Практическая работа № 5 Построение эпюр продольных и нормальных напряжений при растяжении и сжатии, определение перемещений Задание Для заданного статически определимого стального бруса требуется: 1) построить эпюры продольных сил N и нормальных напряжений σ, записав в общем виде для каждого участка выражения N и σ и указав на эпюрах их значения в характерных сечениях; 2) определить общее перемещение бруса и построить эпюру перемещений δ i поперечных сечений, приняв модуль упругости Е = 2·10 5 МПа. Цель работы – научиться строить эпюры продольных сил и нормальных напряжений, и определять перемещения. Теоретическое обоснование Виды нагружения бруса, при котором в его поперечном сечении возникает только один внутренний силовой фактор – N , называемый растяжением или сжатием. Равнодействующая внешних сил прикладывается в центре тяжести поперечного сечения и действует вдоль продольной оси. Внутренние силы определяются с помощью метода сечений. Нормальная сила в сечении бруса является равнодействующей нормальных напряжений, действующих в плоскости поперечного сечения N = ∑F ix (5.1). Величина продольных сил в разных сечениях бруса неодинакова. График, показывающий изменение величины продольных сил в сечении бруса по его длине, называется эпюрой продольных сил. Закон распределения напряжений может быть определен из эксперимента. Установлено, что если на стержень нанести прямоугольную сетку, то после приложения продольной нагрузки вид сетки не изменится, она по-прежнему останется прямоугольной, а все линии прямыми. Поэтому можно сделать вывод о равномерном по сечению распределении продольных деформаций, а на основании закона Гука (σ = Eε) и нормальных напряжений S = const. Тогда N = S· F , откуда получим формулу для определения нормальных напряжений в поперечном сечении при растяжении σp= N МПа A (5.2) A – площадь около рассматриваемого участка бруса; N– равнодействующая внутренних сил в пределах этой площадки (согласно метода сечений). Для обеспечения прочности стержня должно выполняться условие прочности - конструкция будет прочной, если максимальное напряжение ни в одной точке нагруженной конструкции не превышает допускаемой величины, определяемой свойствами данного материала и условиями работы конструкции, то есть σ ≤ [σ ], τ ≤ [τ] (5.3) l При деформации бруса меняется его длина на и поперечный размер – на d . Эти величины зависят и от начальных размеров бруса. Поэтому рассматривают l l – продольная деформация; d / d – поперечная деформация. Экспериментально показано, что / (5.4) (5.5) , где μ = 0, …, 0,5 – коэффициент Пуассона. Примеры: μ=0 – пробка, μ=0,5 – резина, 0,25 0,30 – сталь. 19 В пределах упругой деформации выполняется закон Гука: E , где E – модуль упругости, или модуль Юнга. Порядок выполнения работы 1. Разбиваем брус на участки, ограниченные точками приложения сил (нумерацию участков ведем от незакрепленного конца); 2. Используя метод сечений, определяем величину продольных сил в сечении каждого участка: N = ∑F ix ; 3. Выбираем масштаб и строим эпюру продольных сил, т.е. под изображением бруса (или рядом) проводим прямую, параллельную его оси, и от этой прямой проводим перпендикулярные отрезки, соответствующие в выбранном масштабе продольным силам (положительное значение откладываем вверх (или вправо), отрицательное – вниз (или влево). 4. Определяем общее перемещение бруса и строим эпюру перемещений δ i поперечных сечений. 5. Ответить на контрольные вопросы. Контрольные вопросы 1. Что называется стержнем? 2. Какой вид нагружения стержня называются осевым растяжением (сжатием)? 3. Как вычисляется значение продольной силы в произвольном поперечном сечении стержня? 4. Что такое эпюра продольных сил и как она строится? 5. Как распределены нормальные напряжения в поперечных сечениях центрально-растянутого или центрально-сжатого стержня, и по какой формуле они определяются? 6. Что называется удлинением стержня (абсолютной продольной деформацией)? Что такое относительная продольная деформация? Каковы размерности абсолютной и относительной продольных деформаций? 7. Что называется модулем упругости Е? Как влияет величина Е на деформации стержня? 8. Сформулируйте закон Гука. Напишите формулы для абсолютной и относительной продольных деформаций стержня. 9. Что происходит с поперечными размерами стержня при его растяжении (сжатии)? 10. Что такое коэффициент Пуассона? В каких пределах он изменяется? 11. С какой целью проводятся механические испытания материалов? Какие напряжения являются опасными для пластичных и хрупких материалов? Пример выполнения Построить эпюры продольных сил и нормальных напряжений для нагруженного стального бруса (рис. 5.1). Определить удлинение (укорочение) бруса, если E ст 2 10 5 МПа Рис.5.1 20 Дано: F 1 = 2 kH, F 2 = 5 kH, F 3 = 2 kH, A 1 = 2 см 2 , А 2 4см 2 , l 1 = 100 мм, l 2 = 50 мм, l 3 = 200 мм, l = 150 мм. Решение. Определяем продольные силы и строим их эпюру: N 1 = - F 1 = - 2kH; N 2 = - F 1 + F 2 = -2 + 5 = 3 kH; N 3 = - F 1 + F 2 = 3 kH; N 4 = - F 1 + F 2 + F 3 = -2 +5 + 2 = 5 kH Определяем величину нормальных напряжений и строим их эпюру: N1 2 103 1 10Ì Ï à A1 2 102 N 2 3 103 2 15Ì Ï à A2 2 102 N3 3 103 3 7,5Ì Ï à A3 4 102 N 4 5 103 4 12,5Ì Ï à A4 4 102 Используя видоизмененный закон Гука, определяем удлинение бруса: l1 N1l01 2 103 100 0, 005 ì ì EA1 2 105 2 102 l2 N 2l02 3 103 50 0, 00375 ì ì EA2 2 105 2 102 l3 N3l03 3 103 200 0, 0075 ì ì EA3 2 105 4 102 N 4l04 5 103 150 0, 009375 ì ì EA4 2 105 4 102 l l1 l2 l3 l4 0,005 0,00375 0,0075 0,009375 0,015625 ì ì l4 21 Практическая работа № 6 Расчеты на прочность при растяжении и сжатии Задание Для конструкции и эпюры внутренних сил, построенных при выполнении практической работы № 5, материал – бронза, [σ] = 70 МПа, запас прочности [s] = 1,5. 1. Установить опасное сечение бруса и записать условие прочности. 2. Определить размеры постоянного поперечного сечения бруса в форме квадрата, круга, прямоугольника, приняв h/b=2,0; Цель работы – научиться проводить проектировочные и проверочные расчеты на прочность и жесткость при растяжении и сжатии. Теоретическое обоснование Основные типы расчетов на прочность Используя условие прочности (5.3), можно решать следующие основные типы расчетов: Проектировочный расчет: - определение по известной нагрузке и допускаемому напряжению размеров поперечного сечения стержня (6.1) - подбор материала пред N s Aтр (6.2) где A тр - требуемая площадь сечения; N – продольная сила; [s]- допускаемый коэффициент запаса прочности; пред - допускаемое напряжение. Проверочный расчет - проверка прочности стержня, т.е. определение по заданным нагрузке и размерам поперечного сечения стержня фактических напряжений и сравнение их с допускаемыми. (6.3) Определение максимальной нагрузки по заданным размерам поперечного сечения и [s] (6.4) Величина деформации стержня ∆L при растяжении или сжатии находится по формуле (6.5) где L – длина стержня до нагружения; N – продольная сила; Е – модуль упругости при растяжении, сжатии; А – площадь поперечного сечения стержня. Условие жесткости при растяжении и сжатии (6.6) где L – продольная деформация стержня; [L] – допускаемая деформация. 22 Наиболее рациональным следует признать сечение, обладающее минимальной площадью при заданной нагрузке на брус. В этом случае расход материала на изготовление бруса, будет минимальным. Для получения бруса минимальной материалоемкости нужно стремиться к тому, чтобы по возможности наибольший объем материала работал при напряжениях, равных допускаемым или близким к ним. Прежде всего рациональное сечение бруса должно удовлетворять условию равнопрочности растянутой и сжатой зон бруса. Иными словами необходимо, чтобы наибольшие напряжения растяжения (max ) наибольшие напряжения сжатия (max одновременно достигали допускаемых напряжений и ) . Порядок выполнения работы 1. С помощью метода сечений по виду и расположению нагрузок, устанавливают вид внутренних силовых факторов, возникающих в поперечных сечениях бруса, и делают вывод о виде нагружения бруса. 2. С помощью метода сечений определяют значение и знак ВСФ во всех сечениях по длине бруса, строят их эпюры и отыскивают опасное сечение бруса. 3. По виду ВСФ устанавливают вид напряжения, возникающего в точках опасного сечения. Расчетное напряжение (максимальное напряжение в опасной точке опасного сечения бруса) определяют как отношение ВСФ к поперечному размеру. 4. Определяют размеры поперечных сечений. 5. Ответить на контрольные вопросы. Контрольные вопросы 1. Какие внутренние силовые факторы возникают в сечении бруса при растяжении и сжатии? 2. Как распределяются по сечению силы упругости при растяжении и сжатии? 3. Какого характера напряжения возникают в поперечном сечении при растяжении и сжатии: нормальные или касательные? 4. Как распределены напряжения по сечению при растяжении и сжатии? 5. Запишите формулы для расчета нормальных напряжений при растяжении и сжатии. 6. Перечислите характеристики прочности. 7. В чем различие между предельным и допускаемым напряжениями? 8. Запишите условие прочности при растяжении и сжатии. Отличаются ли условия прочности при расчете прочности на растяжение и расчете на сжатие? Пример выполнения 1. В заданном брусе два участка 1 и 2. Так как силы нагружающие брус, расположены по его центральной продольной оси, то в поперечных сечениях возникает лишь один внутренний силовой фактор – продольная сила N, т. е. имеет место растяжение (сжатие) бруса. 2. Сечение будет опасным, если напряженность σ будет наибольшей (без учета знака). По эпюре (г), видно, что опасное сечение 4 или 2, где б max . 3. Запишем условие прочности: σ max = 4. Определяем коэффициент запаса прочности: [s] 2 = 5. N 2 3 103 N 4 5 103 15 Ì Ï à 12,5Ì Ï à ≤ [σ] ; max 4 A2 2 102 A4 2 102 max 2 70 4, 67 > 1,5; 15 [s] 4 = max 4 70 5, 6 > 1,5 12,5 Прочность бруса обеспечена, однако со значительной (более 25%) недогрузкой, что недопустимо из-за перерасхода материала. Из условия прочности определим новые рациональные размеры сечения каждого из участков бруса: 23 A2 6. N2 s 3 103 1,5 64,3 ì ì 2 ; 70 A4 N4 s 5 103 1,5 107 ì ì 70 Определяем размеры поперечного сечения бруса: A2 64,3 8, 0 ì ì квадрат – а = круг – d 4 A2 11, 7 ì ì , округляем до d = 12,0 мм A2 h b 2b 2 ; прямоугольник - 7. b A2 64,3 5, 68 ì ì , h 2 b 11,36 ì ì 2 2 округляем b = 6,0 мм, h = 11,5 мм Аналогичные расчеты проводят для участка 4 Проводим проверочный расчет: 2 N 2 3 103 46,9Ì Ï à 70Ì Ï à - прочность обеспечена A2 64, 0 Аналогичный расчет проводим для участка 4 а б в Рис.6.1 24 г 2 Практическое занятие №7 Построение эпюр крутящих моментов и определение диаметра вала из условий прочности и жесткости при кручении Задание Для стального вала круглого поперечного сечения определить значения внешних моментов, соответствующих передаваемым мощностям, и уравновешенный момент (табл.7.1 и табл.7.2). Построить эпюру крутящих моментов по длине вала. Определить диаметры вала по сечениям из расчетов на прочность и жесткость. Полученный больший результат округлить до ближайшего четного или оканчивающегося на 5 числа. При расчете использовать следующие данные: вал вращается с угловой скоростью 25 рад/с; материал вала — сталь, допускаемое напряжение кручения 30 МПа, модуль упругости при сдвиге 8 • 104 МПа; допускаемый угол закручивания [ 0 ] = 0,02 рад/м. Провести расчет для вала кольцевого сечения, приняв с = 0,9. Сделать выводы о целесообразности выполнения вала круглого или кольцевого сечения, сравнив площади поперечных сечений. Цель работы - научиться выполнять проектировочные и проверочные расчеты круглого бруса для статически определимых систем, проводить проверку на жесткость. Теоретическое обоснование Кручением называется нагружение, при котором в поперечном сечении бруса возникает только один внутренний силовой фактор – крутящий момент. Внешними нагрузками также являются две противоположно направленные пары сил. Распределение касательных напряжений по сечению при кручении (рис. 7.1) Касательное напряжение в точке А: Рис.7.1 (7.1) где А — расстояние от точки А до центра сечения. Условие прочности при кручении к Mk k ; Wp Wp d 3 16 Wp d 2 16 0,2d 3 (круг), 1 c (кольцо), 2 (7.2) (7.3) где Мк — крутящий момент в сечении, Н-м, Н-мм; Wp — момент сопротивления при кручении, м 3, мм3; [тк] — допускаемое напряжение при кручении, Н/м 2, Н/мм2. 25 Проектировочный расчет, определение размеров поперечного сечения (7.4) где d — наружный диаметр круглого сечения; dBn — внутренний диаметр кольцевого сечения; с = dBK/d. Определение рационального расположения колес на валу Рациональное расположение колес — расположение, при котором максимальное значение крутящего момента на валу — наименьшее из возможных. Для экономии металла сечение бруса рекомендуется выполнить кольцевым. Условие жесткости при кручении 0 Mk 0 ; G ≈ 0,4E GJ p (7.5) где G — модуль упругости при сдвиге, Н/м 2 , Н/мм 2 ; Е — модуль упругости при растяжении, Н/м 2 , Н/мм 2 . [φо] — допускаемый угол закручивания, [φо] = 0, 54-1 град/м; J p — полярный момент инерции в сечении, м 4, мм 4 . Проектировочный расчет, определение наружное диаметра сечения (7.6) Порядок выполнения работы 1. Построить эпюру крутящих моментов по длине вала для предложенной в задании схемы. 2. Выбрать рациональное расположение колес на валу и дальнейшие расчеты проводить для вала с рационально расположенными шкивами. 3. Определить потребные диаметры вала круглого сечения из расчета на прочность и жесткость и выбрать наибольшее из полученных значений, округлив величину диаметра. 4. Сравнить затраты металла для случая круглого и кольцевого сечений. Сравнение провести по площадям поперечных сечений валов. Площади валов рассчитать в наиболее нагруженном сечении (по максимальному крутящему моменту на эпюре моментов). Контрольные вопросы 1. Какие деформации возникают при кручении? 2. Какие гипотезы выполняются при деформации кручения? 3. Изменяются ли длина и диаметр вала после скручивания? 4. Какие внутренние силовые факторы возникают при кручении? 5. Что такое рациональное расположение колос на валу? 6. Что такое полярный момент инерции? Какой физический смысл имеет эта величина? 7. В каких единицах измеряется? Пример выполнения Для заданного бруса (рис.7.1) построить эпюры крутящих моментов, рациональным расположением шкивов на валу добиться уменьшения значения максимального крутящего момента. Построить эпюру крутящих моментов при рациональном расположении шкивов. Из условия 26 прочности определить диаметры валов для сплошного и кольцевого сечений, приняв с = d âí 0,5 . d Сравнить полученные результаты по полученным площадям поперечных сечений. [τ] = 35 МПа. Решение 1. Пользуясь методом сечений. Определяем крутящие моменты на участках вала (рис.7.2). Сечение 1 (рис.7.2а): Ì ê1 m3 400Í ì Сечение 2 (рис.7.2б): Ì ê2 m3 m2 800Í ì Сечение 3 (рис.7.3в): Ì ê3 m3 m2 m1 1000Í ì Рис.7.2 а б в Рис.7.3 2. Строим эпюру крутящих моментов. Значения крутящих моментов откладываем вниз от оси, т.к. моменты отрицательные. Максимальное значение крутящего момента на валу в этом случае 1000 Н·м (рис.7.1). 3. Выберем рациональное расположение шкивов на валу. Наиболее целесообразно такое размещение шкивов, при котором наибольшие положительные и отрицательные значения крутящих моментов на участках будут по возможности одинаковыми. Из этих соображений ведущий шкив, передающий момент 1000 Н·м, помещают ближе к центру вала, ведомые шкивы 1 и 2 размещают слева от ведущего с моментом 1000 Н·м, шкив 3 остается на том же месте. Строим эпюру крутящих моментов при выбранном расположении шкивов (рис.7.3). Максимальное значение крутящего момента на валу при выбранном расположении шкивов – 600 Н*м. 27 Рис.7.4 4. Определяем диаметры вала по сечениям при условии, что сечение – круг. Условие прочности при кручении: k M k / Wp k Момент сопротивления кручению: Wp Wp1 400 103 11, 4 103 ì ì 35 3 Wp1 600 103 17,1103 ì ì 35 3 Wp1 200 103 5, 7 103 ì ì 35 Mk k 3 Определяем диаметры вала по сечениям: d3 Wp 16 ;d 3 16Wp d1 3 16 11, 4 38,8 ì ì 3,14 d1 3 16 17,1 44, 25 ì ì 3,14 d1 3 16 5, 6 31, 0 ì ì 3,14 Округляем полученные значения: d1 40 ì ì , d1 45 ì ì , d1 35 ì ì 5. Определяем диаметры вала по сечениям при условии, что сечение - кольцо Моменты сопротивления остаются теми же. По условию ñ Полярный момент сопротивления кольца: Wp d3 16 dâí d 0,5 1 c 4 Формула для определения наружного диаметра вала кольцевого сечения: 28 16Wp d/ 3 1 c 4 1 1 c4 Расчет можно провести по формуле: d / d 3 Диаметры вала по сечениям: d1/ 10 3 16 11, 4 39, 6 ì ì 3,14 1 0,54 d2 / 10 3 16 17,1 45, 2 ì ì 3,14 1 0,54 d3/ 10 3 16 5, 6 32, 0 ì ì 3,14 1 0,54 Наружные диаметры вала кольцевого сечения практически не изменились. Для кольцевого сечения: d1/ 40, 0 ì ì , d 2 / 46, 0 ì ì , d 3 / 35, 0 ì ì 6. Для выводе об экономии металла, при переходе на кольцевое сечение, сравним площади сечений (рис.7.4) При условии что сечение – круг (рис.7.4а) A d2 4 Сплошное круглое сечение: A1 3,14 402 1256 ì ì 4 2 A2 3,14 452 1590 ì ì 4 2 A3 3,14 352 962 ì ì 4 При условии, что сечение – кольцо, ñ A/ d2 4 dâí dâí2 4 d 2 0,5 (рис.7.4б) d2 4 1 c 2 Кольцевое сечение: A/ 3,14 402 1 0,52 942 ì ì 4 2 A/ 3,14 462 1 0,52 1242 ì ì 4 2 A/ 3,14 352 1 0,52 729 ì ì 4 29 2 Сравнительная оценка результатов: A1 A2 A3 1,3 A1/ A2/ A3/ Следовательно, при переходе с кругового на кольцевое сечение экономия металла по весу составит 1,3 раза. а б рис.7.4 Таблица 7.1 30 Таблица 7.2 Вариант 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 a = b = с, м 1,1 1,2 1,3 1,4 1,5 1,6 1,7 1,8 1,9 2,0 1,1 1,2 1,3 1,4 1,5 1,3 1,4 1,5 1,6 1,7 1,8 1,9 2,0 1,1 1,2 1,3 1,4 1,5 1,4 1,9 Параметры Р1,кВт Р2,кВт 2,1 2,6 2,2 2,7 2,3 2,8 2,4 2,9 2,5 3,0 2,6 3,1 2,7 3,2 2,8 3,3 2,9 3,4 3,0 3,5 3,1 3,4 3,2 3,3 3,3 3,2 3,4 3,1 3,5 2,8 2,1 2,6 2,2 2,7 2,3 2,8 2,4 2,9 2,5 3,0 2,6 3,1 2,7 3,2 2,8 3,3 2,9 3,4 3,0 3,5 3,1 3,4 3,2 3,3 3,3 3,2 3,4 3,1 3,5 2,8 31 Р3,кВт 3,1 3,2 3,3 3,4 3,5 3,6 3,7 3,8 3,9 4,0 4,1 4,2 4,3 4,5 2,9 3,1 3,2 3,3 3,4 3,5 3,6 3,7 3,8 3,9 4,0 4,1 4,2 4,3 4,5 2,9 ПРИЛОЖЕНИЕ А Ориентировочные значения пределов прочности â, Ì Ï à Материал На растяжение На сжатие 310-600 330-750 430-780 - 150-440 300-630 320-600 650-1000 До 1400 - 300-900 400-1500 150-300 180-5-800-900 50 65 - Сталь: углеродистая горячекатаная углеродистая конструкционная легированная конструкционная Чугун: серый ковкий Латунь Бронза оловянная безолованная Алюминий Дюралюминий Титановый сплав ВТ4 Винипласт Полиэтилен - Модули упругости и коэффициенты Пуассона Материал Сталь углеродистая легированная литье Медь Модуль упругости, ГПа Е G 200-210 210 175 32 81 81 - Коэффициент Пуассона 0,24-0,26 0,25-0,33 0,25-0,33 ПРИЛОЖЕНИЕ Б ОБРАЗЕЦ ОФОРМЛЕНИЯ ОБЛОЖКИ К ПРАКТИЧЕСКИМ РАБОТАМ ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ СРЕДНЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ ИРКУТСКИЙ ЭНЕРГЕТИЧЕСКИЙ КОЛЛЕДЖ РАСЧЕТНО-ГРАФИЧЕСКИЕ РАБОТЫ ПО ПРЕДМЕТУ «ТЕХНИЧЕСКАЯ МЕХАНИКА» ВАРИАНТ 1 Выполнил: студент гр. 2ЭС1 Новиков А.В. Проверил: преподаватель Семенюк Л.А. Работа № 1 2 3 4 Оценка ИРКУТСК 2007 33 5 6 7 ПЕРЕЧЕНЬ РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ Основная и дополнительная литература основная №№ 1 2 3 Наименование Техническая механика. Сопротивление материалов Техническая механика. Руководство к решению задач по теоретической механике Автор А.А.Эрдеди, Н.А.Эрдеди А.И.Аркуша А.И.Аркуша Издательство, год издания М., ИЦ «Академия», 2003 г М., ВШ, 2002 г. М., ВШ, 2000 г. дополнительная №№ 1 2 Наименование Детали машин Автор А.А.Эрдеди, Н.А.Эрдеди А.М.Файн Сборник задач по теоретической механике 34 Издательство, год издания М., 2001 г. М, ВШ, 1987 г. ПРИЛОЖЕНИЕ В Расчетные схемы стержней к работе № 5,6 35 36 Таблица числовых вариантов Параметры задачи F, кН L, м 1 20 0,6 2 30 0,5 3 50 0,3 Числовые варианты 4 5 6 7 40 60 25 35 0,4 0,2 0,4 0,3 37 8 55 0,2 9 45 0,5 10 65 0,3