Лекция 3. МОДЕЛИ ДАННЫХ В ГИС ( об объектах в модели.
advertisement

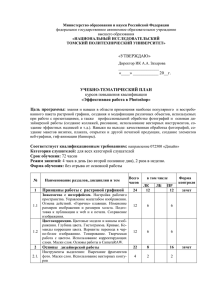
Лекция 3. МОДЕЛИ ДАННЫХ В ГИС (приблизительно 3 часа) Модель данных – способ описания однотипных пространственных объектов, топологические отношения между ними и дополнительные знания об объектах в модели. Классификация моделей данных в ГИС представлена на рис. 3.1. Рис. 3.1. Модели данных в ГИС. Векторные модели описывают совокупность различных объектов (реки, озера, контуры зданий, оси дорог и т.д.). Любой объект в векторной модели – некоторый набор координат на плоскости или в пространстве и совокупность атрибутов. В векторной нетопологической модели все объекты независимы друг от друга и произвольно размещаются в пространстве. Среди векторных нетопологических моделей выделяют два основных подвида: шейп-модель и САПР-модель. Шейп-модель В шейп-модели допустимы, в основном, 3 вида данных: точки, линии, и полигоны. Линии в шейп-модели представлены тремя видами: спагетти, струны и кольца. Спагетти должны состоять, по крайней мере, из одного отрезка, соединяющего две несовпадающие точки. Спагетти могут самопересекаться. На рис. 3.2 приведён пример объекта типа спагетти. Рис. 3.2. Пример данных типа «спагетти» Струны также должны состоять по крайней мере из одного отрезка, соединяющего две несовпадающие точки, струны не могут самопересекаться. На рис. 3.3. приведены примеры допустимой и недопустимой струн. Рис. 3.3. Пример данных типа «струна» (слева – допустимые, справа – нет) Кольца должны иметь совпадающие начальную и конечную точки и не должны иметь самопересечений. На рис. 3.4 приведены примеры допустимого и недопустимого кольца. Рис. 3.4. Пример данных типа «кольцо» (слева – допустимые, справа – нет) Все линейные объекты имеют некоторое значение длины, но всегда нулевую площадь. Полигоны в шейп-модели являются 2-мерными (площадными) объектами и определяются несколькими (не менее одного) контурами, заданными в виде последовательности замкнутых непересекающихся линий. По крайней мере, один из этих контуров должен быть внешним, а остальные – внутренними. Внутренние контуры при этом должны задаваться в порядке обхода контура по часовой стрелке, а внешние – против. На рис. 3.5 приведены пример полигона. Рис. 3.5. Пример данных типа «полигон» САПР-модель - создание на картографической основе сложных графических изображений (схема инженерных сетей, цифровая модель дороги, надписи, размерные линии и т.д.). Векторные топологические модели состоят из собственно описания отдельных объектов, а также из описаний топологии – отношений отдельных объектов между собой. Наиболее распространенными топологическими моделями являются покрытие и транспортная сеть. Векторная топологическая модель данных содержит три типа объектов – узлы дуги и регионы. Каждый из этих объектов имеет уникальный идентификатор ID, с помощью которого устанавливаются взаимные связи между ними. Слой карты, представленный в виде топологической модели данных, называется покрытием. Этот термин происходит из-за того, что взаимное наложение дуг и регионов в модели покрытия не допускается, а вся совокупность регионов «покрывает» всю плоскость (рис. 3.6). Узлы являются обычными точечными объектами, характеризуемыми координатами на плоскости ( x, y) . Дуги являются линейными объектами – ломаными, соединяющими пару узлов покрытия и проходящими через последовательность промежуточных точек. Кроме того, дуги характеризуются ссылками на два смежных (слева и справа) региона. Между собой дуги одного покрытия пересекаться не могут. Регионы (области, полигоны) являются площадными объектами. Они характеризуются набором контуров, каждый из которых, в свою очередь, описывается последовательностью дуг покрытия. Между собой регионы одного покрытия пересекаться не могут. Регионы бывают нескольких основных видов: Простой регион – регион, содержащий только один контур. Составной регион – регион, содержащий более одного контура. U 1 2 3 a k 10 A U 7 B 9 f C 8 j i b e 15 D 13 h 16 14 U U 17 12 11 6 c g d 5 4 Рис. 3.6. Пример данных модели «покрытия» (1-9 – узлы, 10-17 – промежуточные точки, a-k – дуги, A-D – регионы, A,B,D =простые регионы, C – составной регион) Модель транспортной сети Модель транспортной сети предназначена для описания в виде связанного графа схемы транспортных коммуникаций (автомобильных и железных дорог, авиалиний и водных маршрутов) с целью их последующего сетевого анализа. Транспортная сеть содержит 2 основных типа объектов (узлы и дуги), а также один дополнительный – маршруты (рис. 3.7). Узлы являются обычными точечными объектами, характеризуемыми координатами на плоскости ( x, y) . Узлы могут дополнительно характеризоваться такими параметрами, как запреты на выполнение некоторых поворотов и время их выполнения. Дуги являются линейными объектами – ломаными, соединяющими пару узлов транспортной сети и проходящими через последовательность промежуточных точек. Каждая дуга характеризуется длиной или временем движения по ней, разрешенными направлениями движения, классом дороги или пропускной способностью и др. Любой узел характеризуется валентностью – количеством пересекающихся в нем дуг. Для связи объектов служат атрибуты (например, названия пересекающихся улиц или коды и титулы пересекающихся дорог в сети). Дополнительно на транспортной сети могут быть определены объекты еще одного типа – маршруты движения транспорта. Каждый маршрут определяется как замкнутая упорядоченная последовательность узлов и дуг, а также различными числовыми характеристиками (например, расчетное время прохождения транспорта через остановки). Следует заметить, что модель транспортной сети похожа на модель покрытия без регионов. Однако, в отличие от покрытия, в транспортной сети допустимо взаимное пересечение дуг. Это необходимо, например, чтобы показать пересечение автомобильных дорог в разных уровнях. a b A 1 2 e l l 10 B 4 g h i A j 11 d 3 8 g f c A 12 j 5 r A k m m 9 B 6 n B B 7 Рис. 3.7. Пример данных модели «транспортная сеть» (1-7 – узлы, 8-12 – промежуточные точки, 7-9 – остановки, a-n – дуги, A-B – маршруты общественного транспорта) Растровая (ячеистая) модель данных Ячеистые модели описывают непрерывные поля данных (рельеф, фотоснимки местности и т.д.). В ячеистых моделях участки территории неразрывно разбиваются на одинаковые (регулярные) фрагменты или различные нерегулярные фрагменты (треугольники в нерегулярной триангуляционной модели). Каждой ячейке в регулярной модели сопоставляется определенный код (число, код цвета и т.д.) Триангуляционная модель данных (нерегулярная триангуляционная сеть, TIN) предназначена для описания поверхностей. В качестве моделируемой поверхности может выступать рельеф земной поверхности (рис. 3.8) или распределение какого-то параметра по земной поверхности, например, загрязнения окружающей среды, количества выпадающих осадков или среднегодовой температуры. Для моделирования поверхностей может использоваться и растровая модель, когда в каждом пикселе растра задается высота моделируемой поверхности. Однако триангуляционная модель имеет ряд преимуществ по сравнению с растровой: - более высокая точность моделирования, - меньшие затраты памяти, - возможность в явном виде представлять резкие изломы поверхности, т.е. точки и линии, вдоль которых резко меняется кривизна поверхности (вершины гор, границы оврагов, обрывы рек, границы искусственных сооружений). В растровой модели предполагается, что вся моделируемая поверхность является гладкой поверхностью. Рис. 3.8. Триангуляционная модель поверхности Земли Исходными данными для построения триангуляционной модели поверхности служат высотные отметки, изолинии (горизонтали на карте), а также различные структурные линии, меняющие форму поверхности. В основе триангуляционной модели данных лежит триангуляция – особая структура данных из вычислительной геометрии, определенная на плоскости. Триангуляция может быть различного вида. В триангуляционной модели данных часто используется так называемая триангуляция Делоне, в которой треугольники строятся так, чтобы они были «максимально равносторонними», а точнее так, что внутрь окружности, описанной вокруг любого треугольника, по возможности не должны попадать узлы триангуляции (рис. 3.9). Так как триангуляция определена на плоскости, то для моделирования поверхностей в каждом узле триангуляции дополнительно добавляется еще одна координата – высотная отметка. При этом поверхность как бы «вытягивается из плоскости». Рис. 3.9. Пример триангуляции Делоне Сравнительная характеристика векторных и растровых моделей. Векторные модели строятся на векторах, занимающих часть про- странства (в отличие от них, растровые модели занимают все пространство). Преимущества векторных моделей: - меньший объем памяти для хранения информации, - меньше затрат времени на обработку и представление информации, - более высокая точность представления информации. Особенности векторных моделей 1. Они дают доступ к данным в любой последовательности, 2. Позволяют легко работать с точечными объектами (например, замена условных обозначений), 3. Легко работать с линейными объектами (задачи анализа сетей, разработка маршрута движения и т.д.), 4. Векторные данные могут корректироваться с любой степенью точности. В растровых моделях вся исследуемая территория отображается в пространственных ячейках (пикселях), которые образуют регулярную сеть. Каждая ячейка растровой модели соответствует одинаковой по размерам поверхности объекта, но разным свойствам объекта, что отображается определенным цветом. Векторная модель дает информацию, где расположен объект, а растровая – что расположено в той или иной точке территории. Отсюда, основное назначений растровой модели - непрерывное отображение поверхности. Точность растровой модели определяется как ½ ширины и высоты ячейки, так как координаты точки могут относиться как к углу пикселя, так и к его центральной точке. Преимущества растровой модели. - Эти модели проще для обработки данных по параллельным алгоритмам, т.е. более быстро идет расчет для площадных объектов, - Некоторые задачи (например, создание буферной зоны) проще решать в растровых моделях (например, выделение полосы отвода автомобильной дороги, выделение приграничной экономической зоны и т.д.). Векторные модели получают разными способами. Самый распространенный векторизация - процедура выделения векторных объектов с растрового изображения и получение их в векторном формате. Таким образом, растровые модели позволяют вводить векторные данные, обратная задача решается сложнее.