ГЛАВА 4 МЕТОД КОНЕЧНЫХ ЭЛЕМЕНТОВ. РЕШЕНИЕ ПЛОСКОЙ ЗАДАЧИ
advertisement

ГЛАВА 4
МЕТОД КОНЕЧНЫХ ЭЛЕМЕНТОВ. РЕШЕНИЕ
ПЛОСКОЙ ЗАДАЧИ
4.1. СОДЕРЖАНИЕ МЕТОДА.
Метод конечных элементов (MKЭ) представляет собой эффективный
численный метод решения инженерных и физических задач. Он широко
применяется при проектировании судов, летательных аппаратов, несущих
систем многоэтажных зданий и т.п. Для МКЭ характерна ясная физическая
трактовка. Его можно рассматривать, в частности, как обобщение
классического метода строительной механики - метода перемещений. С другой
стороны МКЭ является своеобразной формой часто применяемого
вариационного метода Ритца. Различие между традиционной формой метода
Ритца и МКЭ состоит в выборе системы координатных функций. Если в методе
Ритца функции (обычно ряды) задаются для всей области, то в МКЭ они
задаются для ее частей и через множество этих функций определяется
состояние системы.
y
P1
q2
q1
k
Pn
е
i
j
x
Рис. 4.1
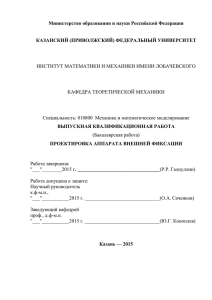
Классический подход
к
задаче об
изучении напряженнодеформированного состояния диска (рис. 4.1) предполагает изучение
бесконечно малого его элемента. Получающиеся при этом дифференциальные
МЕТОД КОНЕЧНЫХ ЭЛЕМЕНТОВ. РЕШЕНИЕ ПЛОСКОЙ ЗАДАЧИ
67
уравнения в частных производных (равновесия и геометрические) совместно с
физическими уравнениями и контурными условиями позволяют определить
напряжения, деформации и перемещения в каждой точке диска.
Метод конечных элементов предполагает иной подход. Рассматривается
элемент конечных размеров, за счет чего осуществляется переход от сплошной
системы с бесконечным числом степеней свободы, к системе с конечным
числом степеней свободы.
Разделим воображаемыми линиями диск, изображенный на рис. 4.1, на
некоторое количество элементов конечных размеров, например, треугольной
формы и примем за узловые точки их вершины. Очевидно, что если диск
находится в равновесии то и его элемент, определенный узлами i, j, k, под
воздействием напряжений (усилий) от смежных элементов, также уравновешен.
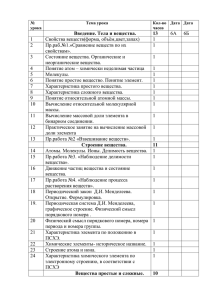
Приложим затем к е-му элементу вместо фактических усилий, действующих
вдоль его граней статически эквивалентные узловые силы, т. е. силы,
вызывающие внутри элемента действительное напряженно-деформированное
состояние (рис. 4.2.).
y
Rky
k
y
Vk
Rkx
k
yk
Riy
Uk
Vi
x
x
i Rk Ri
Rky
yi
Rkx
j
O
x
i
Vj
Ui
Uj
yj
O
(а)
j
xi
xk
xj
x
(б)
Рис. 4.2
Поставив в соответствие каждому узловому усилию узловое
перемещение (рис. 4.2, (б)) представим сплошной диск набором конечных
элементов, взаимодействующих между собой в конечном числе узловых точек.
Такой подход позволяет в дальнейшем использовать один из известных
классических методов строительной механики, например метод перемещений
(возможно также применение метода сил, либо смешанного). Для этого
необходимо установить матрицы жесткости всех конечных элементов и, из
условия равновесия узлов, получить разрешающие уравнения задачи.
Найденные узловые перемещения не дают, однако, полной характеристики
напряженно-деформированного состояния диска. Необходим переход от этих
величин к перемещениям, напряжениям и деформациям внутри конечных
элементов, т.е. речь идет о решении плоской задачи для каждого конечного
68
ГЛАВА 4
элемента, находящегося под воздействием узловых перемещений. Такой
переход
в
МКЭ
осуществляется
приближенно,
путем
задания
интерполяционных (координатных) функций (функций формы), что и делает
метод приближенным. Функции эти (обычно полиномы) такие, что
обеспечивают неразрывность перемещений при переходе от одного элемента к
другому.
Естественно, что при реализации МКЭ возникает необходимость
приведения действующих на конструкцию нагрузок к сосредоточенным
узловым силам.
Обычно все зависимости, связанные с конечным элементом, строятся в
местной системе координат, с последующим переходом в общую систему для
всей области. Это позволяет заранее получить необходимые соотношения для
часто применяемых типов конечных элементов.
Решение задач по методу конечного элемента содержит следующие
этапы:
1. Разбиение заданной области на конечные элементы. Нумерация узлов и
элементов.
2. Построение матриц жесткости конечных элементов.
3. Сведение нагрузок и воздействий, приложенных к конечным элементам, к
узловым силам.
4. Формирование общей системы уравнений; учет условий закрепления.
Решение системы уравнений.
5. Определение напряжений и (при необходимости) деформаций в.
конечных элементах.
4.2. ДИСКРЕТИЗАЦИЯ ОБЛАСТИ.
Разбиение области на подобласти представляет собой первый шаг на пути
к решению задачи, и именно этот шаг не имеет теоретического обоснования.
Искусство разбиения области зависит от имеющихся инженерных навыков.
Плохое или несовершенное разбиение будет приводить к ошибочным
результатам, если даже остальные этапы метода осуществляются с достаточной
точностью.
Дискретизация области (тела) включает задание числа, размеров и формы
подобластей, которые используются для построения дискретной модели
реального тела. При этом, с одной стороны, элементы должны быть выбраны
достаточно малыми, чтобы получить приемлемые результаты, а с другой
стороны,
применение
достаточно
крупных
элементов
сокращает
вычислительную работу. Нужно иметь некоторые общие соображения об
окончательных результатах, с тем, чтобы можно было уменьшить размеры
элементов в тех областях, где ожидаемый результат может сильно меняться.
При решении задач методом конечных элементов используются
элементы различных типов. Наиболее распространенные типы элементов
приведены в табл. 4.1. Ниже будут рассматриваться в основном трехузловые
треугольные КЭ, как наиболее простые и чаще других применяемые для
МЕТОД КОНЕЧНЫХ ЭЛЕМЕНТОВ. РЕШЕНИЕ ПЛОСКОЙ ЗАДАЧИ
69
решения плоской задачи.
Таблица 4.1
Название элемента
стержень
Форма элемента
2
1
Возможное
применение
для анализа
стержни,
фермы
Число
степеней
свободы
2
балки, рамы,
стержни
6
плоская
задача
6
плоская
задача
12
плоская
задача
8
треугольная
пластина
изгиб плит
9
Прямоугольная
пластина
изгиб плит
оболочек
12
объемная
задача
12
плоская
задача
6
балка
2
1
плоский
треугольник
3
1
2
треугольник с 6
узлами
4
1
плоский
четырехугольник
треугольник в
полярных
координатах
2
4
1
тетраэдр
5
6
3
3
2
Разбиение области на элементы. Процесс дискретизации может быть
ГЛАВА 4
70
разделен на 2 этапа: разбиение тела на элементы и нумерация элементов и
узлов. При разбиении любой двумерной области на элементы сначала тело
делится на четырехугольные и треугольные подобласти или зоны, которые
затем подразделяются на треугольники. Границы между подобластями должны
проходить там, где изменяются геометрия, приложенная нагрузка или свойства
элементов.
Наиболее просто можно разбить треугольную подобласть на элементы,
если выбрать определенное число узлов вдоль каждой стороны, соединить
соответствующие узлы прямыми линиями и точки пересечения этих линий
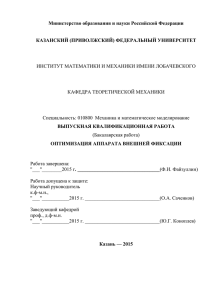
считать узлами. Треугольная зона, показанная на рис. 4.3. разбита на девять
элементов после размещения четырех узлов на каждой стороне. Варьирование
расстояния между узлами на сторонах зоны позволяет изменять размеры
элементов. Если на стороне треугольной подобласти выбрано n узлов, число
треугольных элементов в результате разбиения равняется (n1)2.
Рис. 4.3
Четырехугольные зоны обычно разбивают на элементы соединением узлов на
противоположных сторонах. Пересечения линий определяют внутренние
узловые точки. Внутренние четырехугольники могут рассматриваться как
элементы или могут быть разбиты на треугольные элементы проведением
короткой диагонали в каждом внутреннем четырехугольнике.
Треугольная и четырехугольная зоны могут иметь общую границу.
Число узлов на этой границе для обеих зон должно быть одинаковым и
относительное положение узлов должно совпадать.
В задачах механики твердого деформируемого тела необходимо отметить
узлы, которые имеют известные перемещения. Для обозначения неподвижных
узлов применяется символ неподвижного шарнира. Если узел может
перемещаться только в одном направлении, используется символ подвижного
шарнира. Учет узловых условий такого типа осуществляется путем
видоизменения общей системы уравнений, решение которой определяет
узловые перемещения.
Нумерация узлов. Нумерация узлов влияет на эффективность вычислений,
МЕТОД КОНЕЧНЫХ ЭЛЕМЕНТОВ. РЕШЕНИЕ ПЛОСКОЙ ЗАДАЧИ
71
необходимых для получения решения. Использование МКЭ приводит к системе
линейных алгебраических уравнений, большое число коэффициентов которой
равно нулю. Рассмотрение матрицы коэффициентов системы показывает, что
все ненулевые коэффициенты и некоторые нулевые находятся между двумя
линиями, параллельными главной диагонали. Расстояние между главной
диагональю и этими линиями называется шириной полосы матрицы. Все
коэффициенты вне этой полосы равны нулю и они не должны сохраняться в
памяти ЭВМ. Правильная вычислительная программа использует только те
коэффициенты матрицы, которые находятся внутри указанной полосы.
Уменьшение ширины полосы приводит к сокращению времени вычислений.
Ширина полосы B вычисляется по формуле
(4.1)
B R 1Q ,
где R – максимальная по элементам величина наибольшей разности между
номерами узлов в отдельном элементе; Q – число неизвестных (число степеней
свободы в каждом узле). Минимизация величины В связана с минимизацией R,
что, в частности, может быть осуществлено последовательной нумерацией
узлов при движении в направлении наименьшего размера тела. Правильная
нумерация узлов экономит машинную память более чем на 60%. Нумерация
элементов не влияет на вычислительные аспекты задачи.
4.3. МАТРИЦА ЖЕСТКОСТИ ТРЕУГОЛЬНОГО КОНЕЧНОГО ЭЛЕМЕНТА
ЗАДАЧИ.
ПЛОСКОЙ
Определение перемещений элемента по узловым значениям (построение
матрицы функций формы). Как уже отмечалось, переход от узловых
перемещений к перемещениям внутри конечного элемента выполняется
приближенно, путем применения интерполяционных функций в виде
полиномов.
Поскольку в плоской задаче необходимо одновременно определять
перемещения U и V, рассмотрим вначале решение поставленной задачи для
двухузлового линейного элемента и трехузлового треугольного элемента,
имеющих в каждом узле по одной степени свободы (как, например, в
температурной задаче).
Одномерный элемент представляет собой прямолинейный отрезок
длиной L с двумя узлами, по одному на каждом конце отрезка (рис. 4.4). Узлы
обозначаются индексами i и j, узловые значения через i и j
,соответственно. Начало системы координат находится вне элемента. Полином
для функции принят линейным, в виде
(4.2)
1 2 x .
Коэффициенты 1 и 2 могут быть определены с помощью условий в узловых
точках:
= i при x = Xi ;
= j при x = Xj .
ГЛАВА 4
72
Эти узловые условия приводят к системе двух уравнений
i 1 2 X i ,
j 1 2 X j ,
решение которой дает
i X j j X i
1
2
L
j i
L
,
(4.3)
.
(4.4)
t C
i
Ti =120 C
= 1 + 2 x
Tj = 90 C
j
i
i
j
xi
j
x
L
x
1,5 cм
xj
6 см
Рис. 4.4
Подставляя найденные значения 1 и 2 в формулу (4.2) получаем для
выражение
i X j j X i
L
j i
которое может выть переписано в виде
Xj x
L
i
L
x,
x Xi
j.
L
(4.5)
Линейные функции от x в формуле (4.5) называются функциями формы.
Эти функции в дальнейшем обозначаются через N. Каждая функция формы
должна быть снабжена нижним индексом для обозначения узла, к которому она
относится. В соотношение (4.5) входят следующие функции формы:
Ni
Xj x
L
и Ni
x Xi
.
L
МЕТОД КОНЕЧНЫХ ЭЛЕМЕНТОВ. РЕШЕНИЕ ПЛОСКОЙ ЗАДАЧИ
73
Соотношения ( 4.5 ) можно записать в матричной форме
N i i N j j [ N ]{} ,
где [ N ] [ N i
(4.6)
i
N j ] – матричная строка и {} – вектор столбец.
j
Пример 1. Одномерный элемент используется для аппроксимации
распределения температуры в стержне. В результате решения задачи
установлено, что температура в узлах i и j равна 120° и 90°, соответственно.
Найти температуру в точке на расстоянии 4 см от начала координат.
Температура t внутри элемента определяется соотношением
X x
x Xi
Ti
t j
Tj .
L
L
Xi = 1,5 см, Ti = 120° C, x = 4,0 см;
Xj = 6,0 см, Ti = 90° C, L = Xi – Xj = 4,5 см;
6,0 4,0
4 1,5
t
120
90 53,33 50 103,33C .
4,5
4,5
Двумерный элемент. Двумерный элемент показан на рис. 4.5. Это треугольник
с прямолинейными сторонами и тремя узлами.
k
i
j
k
y
i
j
x
Рис 4.5
Интерполяционный полином принимается линейным
1 2 x 3 y .
В узлах выполняются следующие условия:
i при x X i и y Yi ;
j при x X j и y Y j ;
Φk при x X k и y Yk .
(4.7)
ГЛАВА 4
74
Подставив эти величины в формулу (4.7) получим систему уравнений
i 1 2 X i 3Yi ,
j 1 2 X j 3Y j ,
k 1 2 X k 3Yk ,
решение которой позволяет определить 1 , 2 и 3
1
X jYk X k Y j i X k Yi X iYk j X iY j X jYi k ,
2A
1
Y j Yk i Yk Yi j Yi Y j k ,
2
2A
1
X k X j i X i X k j X j X i k .
3
2A
Определитель системы связан с площадью треугольника А соотношением
1 X i Yi
1 X j Yj 2A.
(4.8)
1 X k Yk
Подставляя выражения 1 , 2 , 3 в формулу (4.7) можно преобразовать
1
выражения для к виду, подобному (4.6)
N i i N j j N k k N ,
где
N N i
Nj
N k , i
j
(4.9)
k ;
ai X j Yk X k Y j
Ni
Nj
1
ai bi x ci y , где bi Y j Yk
2A
ci X k X j
;
a j X k Y j X jYk
1
a j b j x c j y , где b j Yk Yi
2A
cj Xi Xk
;
(4.10)
ak X iY j X jYi
Nk
1
ak bk x ck y , где bk Yi Y j
2A
ck X j X i
.
Пример 2. Требуется построить функции формы и вычислить значение
давления в точке В с координатами Х = 2, Y = 1,5 , если заданы узловые
значения Р (рис. 4.6).
МЕТОД КОНЕЧНЫХ ЭЛЕМЕНТОВ. РЕШЕНИЕ ПЛОСКОЙ ЗАДАЧИ
75
P N i Pi N j Pj N k Pk .
P, Н/см2
Pi = 40
Pk = 46
Pj = 31
(0, 0)
y
i
k
(2, 5)
j
(4, 0.5)
x
Рис. 4.6
Подстановка значений координат узлов в (4.8) дает
1
ai X jYk X k Y j 45 2 19,
2
a j X k Yi X iYk 20 05 0,
1
ak X iY j X jYi 0 40 0,
2
1
bi Y j Yk 5 4,5,
2
b j Yk Yi 5 0 5,
1
0,5,
2
ci X k X i 2 4 2,
bk Yi Y j 0
c j X i X k 0 2 2,
ck X j X i 4 0 4,
1 0
0
2 A 1 4 0,5 20 1 19.
1 2 5
ГЛАВА 4
76
После подстановки констант в функции формы выражение для Р принимает
вид:
1
1
19
4
,
5
x
2
y
P
5
x
2
y
P
x
4
y
Pk .
i
j
19
2
Значение давления Р в точке В с координатами (2, 1,5) равно
1
P 7 40 734 546 39,37 Н/см2.
19
P
Треугольный элемент плоской задачи. На рис. 4.6 показан типичный
конечный элемент с узлами i, j, k, пронумерованными против часовой стрелки.
Перемещения каждого узла имеют две компоненты
u i
,
i
i
(4.11)
а шесть компонент перемещений узлов элемента образует вектор
T { i } { j } { k } .
Перемещения внутри элемента определяется соотношением ( 4.9 )
U N iU i N jU j N kU k ,
V N iVi N jV j N kVk ,
(4.12)
(4.13)
(4.14)
Объединив (4.13) и (4.14) в одно уравнение, получим
Ni
U
N
0
V
0
Ni
Nj
0
0
Nj
Nk
0
0
.
N k
(4.15)
Соотношения между деформациями и перемещениями узлов конечного
элемента (построение градиентной матрицы). Полную деформацию внутри
плоского конечного элемента можно охарактеризовать тремя составляющими
{ }T { x , y , xy }.
Деформации и перемещения связаны между собой известными
дифференциальными соотношениями (уравнениями Коши)
u
x x
y v ,
y
xy u v
y x
(4.16)
МЕТОД КОНЕЧНЫХ ЭЛЕМЕНТОВ. РЕШЕНИЕ ПЛОСКОЙ ЗАДАЧИ
N i
x
0
N i
y
или
N i
x
0
N i
y
N i
x
0
N i
y
N k
x
0
N i
y
N i
x
0
N k
y
77
U
i
0 Vi
N k U j
y V j
N k U
k
x V
k
{ } [ B ]{ },
bi
B 1 0
2A
ci
0
ci
bi
bj
0
cj
0
cj
bj
(4.17)
(4.18)
bk
0
ck
0
ck .
b j
(4.19)
Матрица [В] называется градиентной. Она не зависит от координат точки
внутри элемента, и, следовательно, деформации в нем постоянны.
Пример 3. Используя данные примера 2, построить градиентную матрицу
элемента. Записав уравнения перемещений и используя (4.17) получим
U N iU i N jU j N kU k ,
V N iVi N jV j N kVk ,
Ni
1
19 4,5x 2 y , N j 1 5x 2 y , N k 1 1 x 4 y ,
19
19
19 2
Используя зависимости (4.17), получим
0
5
0 0,5
0
4,5
1
B
0 2
0 2
0
4 .
19
2 4,5 2
5
4 0,5
Матричное представление физических соотношений. Определение
напряжений в КЭ через перемещения узлов (построение матрицы
напряжений). Для случая плоской задачи физические соотношения, т.е.
зависимости между напряжениями и деформациями с учетом вынужденных
(начальных) деформаций { 0 } могут быть представлены в виде:
x
x
x0
y D y D y 0
xy
xy
xy 0
(4.20)
Матрица [D] называется матрицей упругих постоянных и имеет следующий
вид:
1) плоское напряженное состояние в изотропном материале:
ГЛАВА 4
78
1
0
D E 1 0 ,
1
1
0 0
2
(4.21)
2) плоское деформированное состояние в изотропном материале:
1
D E 1
1 1 2 1
0
1
1
0
0 ,
1 2
21
0
(4.22)
где Е – модуль упругости, – коэффициент Пуассона.
Используя (4.18) и (4.20) напряжения в конечном элементе можно
выразить через перемещения его узлов.
{ } [ D][ B]{ } [C ]{ } ,
(4.23)
где С DB.
Матрица [С] называется матрицей напряжений и служит для получения
напряжений при известных перемещениях узлов элемента.
Пример 4. Используя матрицу градиентов [В], построенную в примере 3 и зная,
что E 6 106 H см 2 , 0,25 , построить матрицу напряжений [С].
Матрица упругих постоянных в данном случае имеет вид (плоское
напряженное состояние)
1
0
1
0
,
25
0
8
6 106
E
0,25
1
D
0
1
0 8 105 2
2
2
1
1 1 0.25
3
0
0
0
0 0
2
8
8 2 0
4,5
0
5
0 0,5
1
C DB 8 10 5 2 8 0
0
2
0 2
0
19
0 0 3
2 4,5 2 5
4
36
4,2 10 4 9
6
4
16
- 40
- 10
13,5
6
4
16
4
1
2 0
8 0 ,
0 3
0
4
0,5
-8
- 32 .
- 15 - 12 1,5
Вариационный принцип Лагранжа. Построение матрицы жесткости
конечного элемента. На вариационных принципах базируется большинство
МЕТОД КОНЕЧНЫХ ЭЛЕМЕНТОВ. РЕШЕНИЕ ПЛОСКОЙ ЗАДАЧИ
79
современных приближенных численных методов решения задач теории
упругости. Вариационный принцип (и уравнение) Лагранжа может быть
сформулирован следующим образом: из множества кинематически допустимых
перемещений, перемещения, действительно имеющие место, сообщают
потенциальной
энергии
упругой
системы
минимальное
значение.
Соответствующее уравнение записывается так
Э = 0.
Напомним, что бесконечно малое изменение, называемое варьированием, и
обозначенное в (4.24) символом , подобно дифференцированию. Оно
выполняется по тем же правилам, но не связано с действительным изменением
независимых переменных.
Полная потенциальная энергия упругой системы Э может быть разделена
на две части, одна из которых соответствует работе (энергии деформации)
внутренних сил U, а другая определяется работой приложенных (в частности
внешних) сил П (2.47).
После разбиения области на элементы это равенство должно быть
записано в виде суммы
Э
U
s
e
e ,
(4.24)
e 1
где s – общее количество конечных элементов.
Энергия деформации бесконечно малого объема dU в случае
статического приложения внешних сил и наличия вынужденных деформаций
может быть вычислена по формуле:
1
dU { }T { } { }T { 0 } .
2
(4.25)
Полная энергия деформации получается интегрированием этой величины
по объему тела.
Энергия деформации U e отдельного элемента е с применением (4.25) и
формул (4.18) и (4.23)
Ue
2 {
1
} [ B e ]T [ D e ][B e ]{ e } 2{ e }T [ B e ]T [ D e ]{ 0e } dV .
e T
(4.26)
Ve
Напомним, что транспонирование
выполняется по формуле
произведения
двух
матриц
[ ]T [ B]{ }T { }T [ B]T .
Ввиду симметрии матрицы упругих постоянных [ D]T [ D]. Работа,
совершаемая приложенными силами, может быть разделена на три различные
части: работа Пс, совершаемая внешними сосредоточенными силами; работа
Пр, которая получается в результате действия поверхностных сил (компонент
напряжений) на гранях конечного элемента; работа Пв, совершаемая
объемными силами.
ГЛАВА 4
80
Работу сосредоточенных сил легко определить, если в каждой точке
приложения сосредоточенной силы поместить узел. Поверхностные и
объемные силы в простейшем случае можно также привести к системе узловых
сосредоточенных сил. Работа сосредоточенной силы равна произведению
величины этой силы на длину пути, на котором эта сила действует. Обозначим
узловые силы через {P}, а узловые перемещения через {}, совершенную
работу можно записать в виде произведения матриц:
(4.27)
c { }T {P} {P}T { } .
Используя формулы (4.24) и (4.26), (4.27), получим выражение для полной
потенциальной энергии конечного элемента
Э
1 e T e T e
{ } [ B ] [ D ][B e ]{ e }dV { e }T {P e } { e }T [ B e ]T [ D e ]{ 0e }dV .
2
e
e
V
V
(4.28)
Чтобы минимизировать величину Э, дифференцируем выражение (4.28) по {}
и приравняем результат к нулю. В итоге получается
Э
{ }
[ B e ]T [ D e ][B e ]dV { e } [ B e ]T [ D e ]{ 0e }dV {P e } 0 . (4.29)
Ve
Ve
Запишем (4.29) в другой форме
[ K e ]{ e } {e }.
В (4.30) объемный интеграл
[K e ]
[ B e ]T [ D e ][B e ]dV
(4.30)
(4.31)
Ve
определяет матрицу жесткости конечного элемента. Вектор нагрузки
{e } [ B e ]T [ D e ]{ 0 }dV {P e }.
(4.32)
Ve
В случае постоянной толщины е-го конечного элемента
[ K e ] [ B e ]T [ D e ][ B e ] dV [ B e ]T [ D e ][ B e ]h e Ae
(4.33)
Ve
где he – толщина, Аe – площадь элемента.
Общее выражение для матричного произведения, входящего в (4.33), не
приведено из-за его громоздкости. Матрица жесткости является квадратной; ее
порядок равен числу степеней свободы конечного элемента. Для
рассматриваемого треугольного, трехузлового конечного элемента (рис. 4.2)
порядок МЖ – 66. Нетрудно показать, что МЖ является симметричной и
имеет блочную структуру
МЕТОД КОНЕЧНЫХ ЭЛЕМЕНТОВ. РЕШЕНИЕ ПЛОСКОЙ ЗАДАЧИ
81
K11 K12 K13 K14 K15
K 22 K 23 K 24 K 25
[ K ii ] [ K ij ] [ K ik ]
K 33 K 34 K 35
K e [ K ji ] [ K jj ] [ K jk ]
K 44 K 45
[ K ki ] [ K kj ] [ K kk ]
симметрично
K 55
где [Kij] – квадратная симметричная подматрица порядка r
K16
K 26
K 36
, (4.34)
K 46
K 56
K 66
(r = 2 – число
степеней свободы компонент перемещений в каждом из узлов элемента),
элементами которой являются реактивные усилия по соответствующим
направлениям (х или у) в i-м узле, отвечающие единичным перемещениям по
направлению, которое определено индексом j .
Интеграл, связанный с начальной деформацией в случае постоянной
толщины элемента
[ B e ]T [ D e ]{ 0e } dV [ B e ]T [ D e ]{ 0 }h e Ae .
(4.35)
Ve
Если начальная деформация элемента вызвана его тепловым
расширением, и { 0 }T T{1 1 0}, то для случая плоского напряженного
состояния
[ B e ]T [ D e ]{ 0e }h e Ae
Eh T
bi
21
ci
bj
cj
bk
ck T ,
(4.36)
где – коэффициент температурного расширения, T – изменение
температуры.
Пример 5. Построить матрицу жесткости элемента и вектор правой части для
изображенного ниже элемента в случае плоского напряженного состояния.
Элемент испытывает тепловое расширение вследствие повышения его
температуры на 15° С. В узле k приложены сосредоточенные силы.
100 H
y
h = 2 см, Е = 6106 Н/см2 ,
= 710-6 °С , = 0,25.
200 H
k
Запишем матрицу градиентов
bi
1
B 0
2A
ci
3 см
j
i
1 см
1 см
x
0
ci
bi
где A = (32)/2 = 3 см2
bj
0
cj
0
cj
bj
bk
0
ck
0
ck ,
bk
ГЛАВА 4
82
bi = Yj – Yk = - 3
ci = Xk – Xj = - 1
bj = Yk – Yi = 3
cj = Xi – Xk = - 1
bk = Yj – Yj = 0
ck = Xj – Xi = 2
0
3 0 0
3
B 1 0 1 0 1 0
6
1 3 1 3 2
Матрица упругих постоянных [D]
0
0,25
1
1
6
6 10
D E 2 1
0
0,25
1
1 0,252
1
0 0 1 2
0
0
0
2 .
0
0
6,4 10 6
0
8
3 8
8 2 0
2 8 0
0 0 3
Запишем матрицу жесткости элемента
3 0 1
24
0 1 3
2
8 2 0
6
6
3 0 1 6,4 10
6,4 10 24
BT D 1
2
8
0
3
6 0 1
8
8
2
0 0 3
0 0
0
2
0
0 2
4
24 6 3
2 8 9
3
0
3 0 0
6
24
6
3
h
6
,
4
10
Ke
0 1 0 1 0
9
8 6 2 8
1 3 1 3 2
0
0
6
4
16
0
15 69 3 6 12
75
15
35
3 19 18 16
69
3
75 15 6
12
K e 13333
.
3
19
15
35
18
16
6 18 6
18
12
0
12 16
0
32
12 16
6 3
8 9
6 3
,
8
9
0
6
16
0
0
2 ,
0
МЕТОД КОНЕЧНЫХ ЭЛЕМЕНТОВ. РЕШЕНИЕ ПЛОСКОЙ ЗАДАЧИ
83
Вектор нагрузки элемента {e } обусловлен как тепловым воздействием,
так и сосредоточенными силами. Вклад в вектор нагрузки теплового
воздействия определяется формулой (4.36)
t
e
3 2520
1 840
6
6
7 10 6 10 2 15 3 2520
.
1
840
21 0,25
0
0
2
1680
Вклад в {e } сосредоточенных сил определяется следующим вектором:
0
0
0
p e
.
0
100
200
Теперь можно записать систему уравнений для элемента е
75 15 69 3 6 12 U i 2520
35
3 19 18 16 Vi 840
75 15 6
12 U j 2520
13333
.
V
35
18
16
840
j
12
0 U k 100
32 Vk 1880
e
Существует два способа проверки правильности составления матрицы [K ].
Прежде всего она должна быть симметричной матрицей с положительными
коэффициентами на главной диагонали. Кроме того, сумма коэффициентов
любой строки или столбца матрицы должна обращаться в нуль.