Файзуллин Ф.И. Оптимизация аппарата внешней фиксации
advertisement

Министерство образования и науки Российской Федерации
КАЗАНСКИЙ (ПРИВОЛЖСКИЙ) ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
ИНСТИТУТ МАТЕМАТИКИ И МЕХАНИКИ ИМЕНИ ЛОБАЧЕВСКОГО
КАФЕДРА ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ
Специальность: 010800 Механика и математическое моделирование
ВЫПУСКНАЯ КВАЛИФИКАЦИОННАЯ РАБОТА
(Бакалаврская работа)
ОПТИМИЗАЦИЯ АППАРАТА ВНЕШНЕЙ ФИКСАЦИИ
Работа завершена:
"___"________2015 г. _________________________________(Ф.И. Файзуллин)
Работа допущена к защите:
Научный руководитель
к.ф-м.н.,
"___"___________2015 г. ______________________________(О.А. Саченков)
Заведующий кафедрой
проф., д.ф-м.н.
"___"___________2015 г. ______________________________(Ю.Г. Коноплев)
Казань — 2015
2
СОДЕРЖАНИЕ
Введение………………………………………………………………3
Методы решения……………………………………………………..4
Тетраэдальный конечный элемент………….......................11
Гексоганальный конечный элемент…………………........13
Постановка задачи………………………………………………….14
Результаты решения………………………………………………..20
Выводы………………………………………………………………24
Список литературы…………………………………………………25
3
ВВЕДЕНИЕ
Высокий
уровень распространенности
заболевания
тазобедренного
сустава у детей и определяет медицинскую и социальную значимость
проблемы. Среди заболеваний тазобедренного сустава в детском возрасте
болезнь Пертеса отмечена в 25-30% (Низковская М.М., Грацианский В.П., 1940;
Абальмасова Е.А., 1983; Овчинников Г.И., 1991). Прогноз при лечении болезни
Пертеса при тяжелом поражении эпифиза до 89,5% случаев заканчивается
остаточной деформацией головки бедренной кости и вертлужной впадины и
развитием коксартроза (Лимин А.Л., 1974). Хирургический метод лечения
остеохондропатии головки бедра у детей имеет решающее значение.
Целью нашей работы является изучение и расчет аппарата внешней
фиксации (патент на изобретение №2440050 «Способ лечения болезни
Пертеса»), применяемый для медицинской реабилитации детей и подростков с
болезнью Легга-Кальве-Пертеса.
4
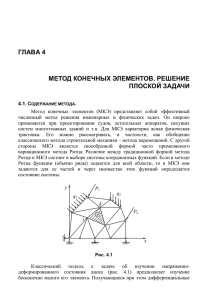
МЕТОД КОНЕЧНЫХ ЭЛЕМЕНТОВ
Определение распределения напряжений и деформаций в упругой
сплошной среде важная и актуальная задача современной инженерии.
Предметом исследования могут являться двумерные задачи о плоском
напряженном и деформированном состояниях, и конечно же, исследование
трехмерных деформируемых твердых тел. Важным является выбор формы
элемента и функций аппроксимации перемещений для конкретных задач
механики, что зависит от типа задач, физики материала и определяет точность
приближенного решения. Ниже изложен подход известный как метод
перемещений. При подходящем выборе поля перемещений - решение должно
сходиться к аналитическому.
Конечный элемент е определяется узловыми точками i, j, т и т. д. и
прямолинейными границами.
Рис.1. Плоская область, разбитая на конечные элементы.
5
Зададим перемещения произвольной точки внутри элемента векторстолбцом
(1.1)
где компоненты [N] являются функциями формы, а
представляют собой
узловые перемещения для выбранного элемента.
Функции
подстановке
должны быть выбраны таким образом, чтобы при
в
(1.1)
координат
перемещения. В общем случае:
узлов
получались
соответствующие
(единичная матрица),
тогда как
что, достигается выбором линейных относительно х и у функций.
Если перемещения известны во всех точках элемента, то в этих точках
можно определить и деформации по формуле Коши. В матричном виде это
выражение представимо
(1.2)
В случае плоского напряженного состояния представляют интерес
деформации в плоскости, которые определяются через перемещения
.
Матрица [В] легко получить из соотношения (1.1), по определенным
функции формы
.
6
В общем случае материал, который находится внутри элемента, может
иметь начальные деформации. Если обозначить их через
, то напряжения
будут
и
определяться
разностью
между
актуальными
начальными
деформациями.
В рассматриваемый момент времени в теле могут существать остаточные
напряжения
. Эти напряжения можно добавить к общему выражению.
Таким образом, в предположении упругого поведения соотношения между
напряжениями и деформациями представимы в виде:
(1.3)
где [D] — матрица упругости, содержащая характеристики материала.
Для частного случая плоского напряженного состояния необходимо
рассмотреть три компоненты напряжений, соответствующие введенным
деформациям. В принятых обозначениях они записываются в виде
.
Матрицу
[D]
легко
получит
из
обычных
соотношений
напряжениями и деформациями для изотропного материала [8-11]:
,
,
,
Откуда
.
Обозначим силы в узлах через вектор-столбец:
между
7
Каждая из сил
должна иметь столько же компонент, сколько и
узловых перемещений
в соответствующем узле и действовать в указанном
направлении. Распределенные нагрузки {р} определяются как нагрузки,
приходящиеся на единицу объема материала элемента и действующие в
заданном направлении.
В частном случае, например для плоского напряженного состояния
узловые силы записываются в виде
где
U
и
V—компоненты,
соответствующие
перемещениям
u
и
v.
Распределенная нагрузка имеет вид
,
где X и Y—компоненты «объемных сил».
Чтобы сделать узловые силы статически эквивалентными действующим
граничным
напряжениям
и
распределенным
нагрузкам
стоит
задать
виртуальное узловое перемещение и приравнять внешнюю и внутреннюю
работы,
совершаемые
различными
силами
и
напряжениями
на
этих
виртуальных перемещениях.
Пусть
—виртуальное перемещение в узле. Тогда используя
соотношения (1.1) и (1.2) получим соответственно перемещения и деформации
элемента в матричном виде
и
(1.4)
Определим работу, совершаемую узловыми силами, как произведение
компонент каждой силы на соответствующие возможные перемещения:
(1.5)
8
Аналогично
определим
внутреннюю
работу
напряжений
и
распределенных сил, приходящаяся на единицу объема:
(1.6)
Или
(1.7)
Приравнивая работы внешних сил и суммарную внутреннюю, после
интегрирования по всему объему элемента, получим
(1.8)
Тогда для можно приравнять коэффициенты в правой и левой частях.
После подстановки (1.2) и (1.3) получаем
(1.9)
Полученная зависимость является одной из основных характеристик
конечного элемента. Матрица жесткости в этом случае принимает вид
(1.10)
Узловые силы, обусловленные распределенными нагрузками, могут быть
выписаны как
(1.11)
а силы, обусловленные начальной деформацией, выражаются следующим
образом
(1.12)
Узловые силы, соответствующие начальным напряжениям, могут быть
записаны
(1.13)
9
Если система начальных напряжений удовлетворяет уравнениям статики,
то того как будет собран ансамбль силы, определяемые соотношением (1.13),
тождественно равны нулю.
Составление ансамбля и дальнейшее решение, получаемых систем
линейных уравнений производятся с помощью известных численных методов.
В общем случае в узлах могут быть приложены сосредоточенные внешние
силы. Тогда для сохранения условия равновесия в узлах введем дополнительно
матрицу сил
(1.14)
Если на границе заданы перемещения, то таких затруднений не возникает.
Если на границе задана распределенная внешняя нагрузка {q} на единицу
площади,
тогда
в
узлах
граничного
элемента
следует
приложить
дополнительную нагрузку, что можно сделать, используя принцип виртуальной
работы:
(1.15)
где интегрирование проводится по границе элемента. Стоит отметить, что
записанное выше выражение было справедливо для {q} , если число компонент
{q} совпадает с {f}.
На рис. 1 показан граничный элемент для случая плоского напряженного
состояния. Интегрирование в (1.15) обычно выполнить числено. Часто из
физических соображений поверхностная нагрузка заменяется узловыми силами,
которые определяются из условий статического равновесия.
После, того как из решения общей системы уравнений определены
узловые перемещения, по соотношениям (1.2) и (1.3) можно определить
напряжения в точках элемента
(1.16)
10
Матрица напряжений элемента выражается как
(1.17)
К этой матрице должны быть добавлены начальные напряжения
и
(1.18)
Отсутствие составляющей напряжения, вызванного распределенной
нагрузкой
равновесия.
, объясняется тем, что рассматриваются только условия общего
11
ТЕТРАЭДРАЛЬНЫЙ КОНЕЧНЫЙ ЭЛЕМЕНТ
Функции перемещений
Рис. 2. Тетраэдральный элемент. (При нумерации узлов следует придерживаться
определенного порядка, начиная, например, с точки р, остальные узлы нумеруются в
направлении против часовой стрелки по отношению к ней — pijm или mipj и т. д.)
На рис. 2 изображен тетраэдральный элемент ijpm в системе координат х,
у и z. Перемещение в любой точке определяется по компонентам и, v и w в
направлениях глобальных координат х, у и z. Таким образом можно записать
вектор перемещений:
(1.19)
В трехмерном случае необходимо задать четыре узловых значения, для
определения перемещений в узлах. По аналогии их можно записать в виде
(1.20)
Приравнивая эти выражения перемещениям в узловых точках, получим
четыре характерных уравнения
и т.д.,
из которых определяются коэффициенты
(1.21)
12
Эти соотношения можно переписать в виде
(1.22)
где
(1.23)
Величина V в данном случае представляет собой объем тетраэдра.
Коэффициентами
,
,
,
обозначены определители
,
,
Остальные коэффициенты получаются циклической перестановкой индексов
p,i,j,m .
Как видно из рис. 2, узлы р, i, j, m пронумерованы в соответствии с
правилом правой руки.
Перемещение
элемента
определяется
двенадцатью
компонентами
перемещений его узлов:
(1.24)
Где
13
и т.д,
Перемещение произвольной точки можно выразить через функции формы
(1.25)
где скалярные величины определяются соотношениями
и т. д.,
(1.26)
а I — единичная матрица размерности .
Эти
функции
перемещений
будут
непрерывности на границах между элементами.
удовлетворять
требованиям
14
ГЕКСАГОНАЛЬНЫЙ КОНЕЧНЫЙ ЭЛЕМЕНТ
Можно построить трехмерные элементы с дополнительными узлами и
других элементарных форм. Однако правила обеспечения непрерывности
между элементами необходимо вывести математически. Что в терминах
функции формы является требованием единственности определения узловых
значений.
Рис. 3. Правильные призмы с узлами на границе и соответствующие плоские и
линейные элементы.
Для
трехмерных
нормализованных
координат
можно
следующие функции формы:
Для элементов первого порядка (8 узлов):
(1.27)
Для элементов второго порядка (20 узлов): угловые узлы
получить
15
(1.28)
типичный узел на ребре
,
,
,
.
Функция формы для элементов показанного на рис. 3 типа может быть
построена в виде полинома Лагранжа. Обобщая все вышесказанное, запишем
(1.29)
16
РАСЧЕТНАЯ МОДЕЛЬ
В работе рассмотрена рис.1, рис.2 конструкция аппарата внешней
фиксации для проведения ротационной остеотомии проксимального участка
бедренной кости. Аппарат представляет собой металлические сектора, на
который крепятся стержни, проходящие через костную ткань. Сектора
соединены шпильками, позволяющие менять их ориентацию со скоростью
порядка одного миллиметра в день.
Рис.4.
Рис.5.
Модели деталей аппарата, как и сама модель аппарата была построена в
программе NX Siemens. На рисунках ниже изображены модели деталей
аппарата.
17
Рис.6. Стержень (см. рис. 4.7,5)
Рис.8. Крепление 1(см. рис. 4.10)
Рис.10. Крепление 3(см. рис. 4.10)
Рис.7. Шпилька(см. рис. 4.9)
Рис.9. Крепление 2(см. рис. 4.10)
Рис.11. Крепление 4(см. рис. 4.10)
18
Рис.12. Специальная дуга(см. рис. 4.4,8)
После прикрепления деталей друг к другу получим окончательную
сборку конструкции рис.13
Рис.13. Сборка
Далее привязывается все детали аппарата между собой рис.14
Рис. 14. Условие привязки деталей между собой
19
Построенная модель позволяет моделировать различные положения
конструкции. Ниже представлены рисунки различных расположений рис. 15-17,
при различных углах разворота сектора.
Рис.15. Расположение аппарата под углом 131
Рис.16. Расположение аппарата под углом 42
Рис.17. Расположение аппарата под углом 12
Для
построенной
модели
было
произведено
конечно-элементное
разбиение. В конечно-элементной модели были использованы два типа
конечных элементов (КЭ):
4-ёх узловой тетраэдальный КЭ с линейной
20
аппроксимацией
рис.15
и
4-ёх
узловой
гексагональный
с
линейно
аппроксимацией рис.16.
Рис.18. Тетраэдальный КЭ
Тетраэдральный
конечный
Рис.19. Гексоганальный КЭ
элемент
применялся
для
деталей
с
нерегулярной геометрией. После применения конечного элемента, в местах
соединения деталей накладывались условия совместности узлов сетки рис.20
для того, чтобы решение не “распадалась”.
Конструкция изготавливается из стали 12Х18Н10Т, с механическими
11
характеристиками E 2 10 Па, 0.3,[ T ] 600МПа,[ cp ] 140МПа
21
Рис.20. Условие совместности узлов сетки
Далее с одной стороны задаем условие закрепления (фиксация), а с
другой задаем момент рис. 21, после чего можно переходить к расчетам
конструкции.
Рис.21. Условие закрепления и момент
В работе были проведены расчеты на прочность и жесткость.
Прочностная оценка производилась согласно теории Мизеса-Генки.
Тогда критерий прочности будет: max( i ) [ T ]
22
Рис.22. Перемещения (мм).
На рис.22 видно, что максимальные перемещения находится на первой
скобе. Для оценки жесткости ограничивались максимальные перемещения:
max(| U |) [U ]
Рис.23. Напряжение по Мизесу (МПа)
Максимальные напряжения при нагружении локализуются на стержнях и
шпильках, как показано на рис.23. При расчетной нагрузке M = 1 Нм
максимальное значение интенсивности напряжение составило 22.18 МПа.
Коэффициент запаса конструкции при этом составляет 27, коэффициент запаса
по нагрузкам при этом составляет 20.
23
Рис.24. Касательные напряжения (МПа)
Особое внимание уделялось оценке напряженного состояния в местах
соединения деталей, где крепеж осуществляется за счет резьбового соединения.
Надежность этих узлов, обеспечивает жесткость всей конструкции. В этом
случае выражение прочности соединения осуществляется согласно выражению:
max( max ) [ cp ]
Производилась оценка максимальных касательных напряжения на
шпильках, крепежах и т.д. в зоне соединения деталей. Коэффициент запаса в
этом случае составлял 14-43.
Рис.25. Максимальные перемещения (мм) при различном угле разворота скобы
24
Рис.26. Касательные напряжения
в шпильках при различном угле разворота
(МПа)
Рис.27. Касательные напряжения
в стержнях при различном угле разворота
(МПа)
25
Рис.28. Касательные напряжения в стержнях и шпильках (МПа)
На основании оценки прочности конструкции и крепежных элементов
коэффициент запаса по нагрузкам выбираем 10, то есть максимальный
прикладываемый момент к работающей конструкции не должен превышать
10Нм.
26
ВЫВОДЫ
В работе рассмотрена конструкция аппарата внешней фиксации и была
построена трехмерная модель аппарата в программе NX Siemens. Для
определения
напряженно-деформируемого
состояния
конструкции
был
использован метод конечных элементов. При разбиении деталей конструкции
использовались 4ех узловой тетраэдальный и 8ми узловой гексоганальный
конечные элементы с линейными аппроксимациями. В местах соединения
деталей применялось условие стыковки общих узлов сетки. Для опорных
стержней было задано условие закрепления (жесткая заделка) и для поворотных
стержней были заданы статические граничные условия - приложен момент.
Были проведены расчеты на жесткость и прочность конструкции,
результатами которых являлись поля распределения перемещений узлов и
компонент тензора напряжений в элементах. На основании полученных
результатов была проведена оценка прочности конструкции (по теории Мизеса)
и резьбовых соединений (по максимальным касательным напряжениям).
Результаты полученные при решении показали, что аппарат выдержит
конструкционные нагрузки до 10 Нм.
27
Список литературы:
1. NX Advanced Simulation. Инженерный анализ. /Гончаров П. С., Артамонов И.
А., Халитов Т. Ф., Денисихин С. В., Сотник Д. Е. – М.: ДМК Пресс, 2012. – 504
стр.
2. Биргер И.А., Иосилевич Г.Б. Резьбовые соединения / И.А.Биргер,
Г.Б.Иосилевич.– М.: Машиностроение, 1973.
3. Дианов Х.А., Ефремов Н.Г., Мицкевич В.Г. Детали машин. Курс лекций /
Х.А.Дианов, Н.Г.Ефремов, В.Г. Мицкевич.– М., 2003.
4. Зубчанинов В.Г. Механика сплошных сред. – Тверь: ТГТУ, 2000. – 703 с.
5. Лейбезон Л.С. Краткий курс теории упругости. – М.: Гостехиздат, 1942. – 304
с.
6. Работнов Ю.Н. Механика деформируемого твердого тела. – М.: Наука, 1979.
– 744 с.
7. Тимошенко С.П., Гере Дж. Механика материалов /С.П.Тимошенко, Дж.Гере
– М.: Мир, 1976. – 669 с.
8. Галлагер Р. Метод конечных элементов. Основы: Пер. с англ. — М.: Мир,
1984
9. Деклу Ж. Метод конечных элементов: Пер. с франц. — М.: Мир, 1976
10. Зенкевич О. Метод конечных элементов в технике — М.: Мир, 1975.
11. Зенкевич О., Морган К. Конечные элементы и аппроксимация / О.Зенкевич,
К.Морган: Пер. с англ. — М.: Мир, 1986
12. Сегерлинд Л. Применение метода конечных элементов — М.: Мир, 1979. —
392 С.
13. Седов, Р.Л. О расчёте параметров динамических стабилизирующих
конструкций на основе математической модели трёхпозвонкового комплекса
человека /Р.Л.Седов, С.В.Орлов, Н.Д.Бобарыкин //Математическое
моделирование. 2010. Т. 22. № 2. С. 113-123.
14. Щербаков, С.В. Создание программы расчёта стержневых конструкций
методом конечных элементов / С.В.Щербаков, Р.М.Шахбанов
//Фундаментальные и прикладные проблемы техники и технологии. 2010. № 23. С. 91-95.
15. Способ расчёта на прочность протяженных тонкостенных конструкций с
неосесимметричной формой поперечного сечения /И.В. Кудрявцев, Е.С.
Барыкин, О.Б. Гоцелюк, А.О. Морданов, Е.Ю.Горохова //Молодой ученый.
2012. № 12. С. 84-90.
28
16. Коренева Е.Б. Решения задач расчёта тонкостенных конструкций с
использованием специальных функций/ Е.Б.Коренева //Вестник МГСУ. 2011. №
4. С. 65.
17. Классификация моделей систем твёрдых тел, используемых в численных
расчётах динамического поведения машиностроительных конструкций
/В.Н.Иванов, И.В.Домбровский, Ф.В.Набоков, Н.А.Шевелев, В.А.
Шимановский. //Вестник Удмуртского университета. Математика. Механика.
Компьютерные науки. 2012. № 2. С. 139-155.
18. Шершнева М.В. Метод расчёта ресурса стержневых конструкций на основе
энергетического варианта ползучести и длительной прочности/ М.В.Шершнева
//Вестник Самарского государственного технического университета. Серия:
Физико-математические науки. 2012. № 1. С. 141-149.