МИНОБРНАУКИ РОССИИ
————————————————–
Санкт-Петербургский государственный электротехнический
университет „ ЛЭТИ “ им. В. И. Ульянова (Ленина)
АЛГЕБРА И ГЕОМЕТРИЯ
В ПРИМЕРАХ и ЗАДАЧАХ
Часть 2
Учебное пособие
Санкт-Петербург
Издательство СПбГЭТУ „ ЛЭТИ “
2021
МИНОБРНАУКИ РОССИИ
————————————————–
Санкт-Петербургский государственный электротехнический
университет „ ЛЭТИ “ им. В. И. Ульянова (Ленина)
АЛГЕБРА И ГЕОМЕТРИЯ
В ПРИМЕРАХ и ЗАДАЧАХ
Часть 2
Учебное пособие
Санкт-Петербург
Издательство СПбГЭТУ „ ЛЭТИ “
2021
УДК 511.86(07)+514(07)
ББК B 14я7+B 15я7
A45
Авторы: Н. А. Бодунов, А. А. Дороденков, С. А. Колбина,
Н. М. Червинская.
A45 Алгебра и геометрия в примерах и задачах: учеб. пособие: в 2 ч. Ч. 2.
СПб.: Изд-во СПбГЭТУ „ЛЭТИ“, 2021. 80 с.
ISBN 978-5-7629-2688-1 (Ч.2)
ISBN 978-5-7629-2690-4
Соответствует рабочим программам дисциплины „Алгебра и геометрия“ для бакалавров технических факультетов, факультета экономики и
менеджмента и открытого факультета.
Включает в себя большое количество примеров решения типовых задач. Содержит разной сложности упражнения для самостоятельной работы
студентов.
Предназначено для студентов указанных факультетов.
УДК 511.86(07)+514(07)
ББК B 14я7+B 15я7
Рецензенты: кафедра высшей математики ВШТЭ СПбГУПТД;
д-р техн. наук, проф. А. П. Господариков (СПГУ).
Утверждено
редакционно-издательским советом университета
в качестве учебного пособия
ISBN 978-5-7629-2688-1 (Ч.2)
ISBN 978-5-7629-2690-4
c СПбГЭТУ „ЛЭТИ“, 2021
ВВЕДЕНИЕ
Данное издание является продолжением первой части сборника примеров и упражнений по основным разделам дисциплины „Алгебра и геометрия“ [1].
Во вторую часть пособия вошли разделы: „Векторная алгебра“, „Элементы аналитической геометрии“, „Пространства Cn и Rn “, „Собственные
числа и собственные векторы матрицы“, „Квадратичные формы“.
Каждый раздел начинается с краткого изложения теоретического материала, необходимого для решения задач. Вводимые определения, алгоритмы, теоремы иллюстрируются примерами. В конце каждого раздела
содержатся разнообразные упражнения по рассматриваемым темам. Наиболее трудные из них отмечены значком ∗. Все упражнения имеют ответы.
Для изучения теоретического материала рекомендуем использовать
учебные пособия [2], [3], а также учебник [4].
Пособие дополняет издания [5], [6] и может быть использовано студентами для самостоятельного выполнения заданий, а также преподавателями, ведущими занятия по дисциплине „Алгебра и геометрия“.
5.
ВЕКТОРНАЯ АЛГЕБРА
Подробно теоретический материал этого раздела изложен в учебном
пособии [2].
5.1.
Векторное пространство R3
Рассмотрим множество всех направленных отрезков (геометрических
−→
векторов). Будем обозначать такие векторы ~a или AB, где точка A – нача−→
ло, а точка B – конец вектора AB. Длину вектора будем обозначать |~a| и
−→
|AB| соответственно.
Вектор, начало и конец которого совпадают, называется нулевым и
обозначается ~0. Длина нулевого вектора равна нулю.
Векторы, длина и направление которых совпадают, отождествляются.
Это означает, что вектор не меняется при параллельном переносе.
Векторы ~a и ~b называются коллинеарными, если они лежат на одной
прямой или на параллельных прямых, в противном случае векторы называются неколлинеарными.
Векторы ~a, ~b и ~c называются компланарными, если они лежат в одной
плоскости или на параллельных плоскостях, в противном случае векторы
называются некомпланарными.
Упорядоченная тройка некомпланарных векторов ~a, ~b и ~c называется
правой, если наименьший поворот от вектора ~a к вектору ~b, наблюдаемый
3
из конца вектора ~c, происходит против часовой стрелки. В противном случае тройка векторов ~a, ~b и ~c называется левой.
Геометрические векторы можно складывать и умножать на число.
При сложении векторов используют хорошо известные из школьного
курса правило треугольника (рис. 5.1) или правило параллелограмма
(рис. 5.2).
~a
~b
~a
~
~c = ~a + b
~
~c = ~a + b
~b
Рис. 5.2
Рис. 5.1
При умножении ненулевого вектора ~a на число λ получается коллинеарный ему вектор λ~a, длина которого находится по правилу: |λ~a| = |λ||~a|, а
направление при ~a 6= ~0 совпадает с направлением вектора ~a, если λ > 0, и
противоположно направлению ~a, если λ < 0. При λ = 0 вектор λ~a является
нулевым.
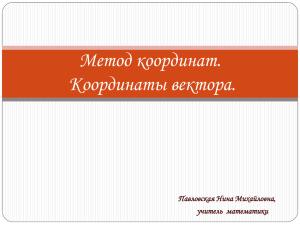
С помощью трех попарно ортогональных единичных векторов ~i, ~j, ~k,
образующих правую тройку (называемых также координатными ортами),
и некоторой точки O зададим систему координат (рис. 5.3). Точка O называется началом координат. Оси OX, OY , OZ, определяемые векторами,
называются координатными осями (соответственно – ось абсцисс, ось ординат, ось аппликат); плоскости, проходящие через каждые две координатные
оси, – координатными плоскостями (OXY , OXZ, OY Z).
Начало любого вектора можно поместить в начало координат. Поэто−−→
му любой вектор ~a можно отождествить с вектором OM , начало которого
−−→
находится в точке O, а конец – в некоторой точке M (~a = OM ), называемым радиусом-вектором точки M .
−−→
Ясно (рис. 5.3), что вектор OM однозначно определяется координатами точки M (x, y, z) и, кроме того, этот вектор представляется в виде
−−→
~a = OM = x~i + y~j + z~k.
−−→
При этом числа x, y, z называют координатами вектора OM и пишут
−−→ x
~a = OM = y .
z
Таким образом, любому вектору ~a ставится в соответствие упорядоченная тройка вещественных чисел, и поэтому множество геометрических
4
векторов обозначают R3 .
Длину вектора ~a находят по формуле
q
|~a| = x2 + y 2 + z 2 .
Z
z
Введенные ранее операции сложения векM
торов и умножения вектора на число выполz~k
~a
няются по следующим правилам.
Если
координаты векторов
~k
~j
известны
x1
x2
y
~i O
~a = y1 и ~b = y2 , то
x~i
z1
z2
x
y~j
X
x1
x2
x1 + x2
~a + ~b = y1 + y2 = y1 + y2 .
Рис. 5.3
z1
z2
z1 + z2
x
Если ~a = y – некоторый вектор, а λ –
z
число, то
x
λx
λ~a = λ y = λy .
z
λz
Y
Разность векторов ~a и ~b можно рассматривать как сумму векторов ~a
и (−1 · ~b):
~a − ~b = ~a + (−1 · ~b).
1
Умножение вектора ~a на число (λ 6= 0) означает деление вектора ~a
λ
на число λ.
−−−−→
Если известны координаты начала и конца некоторого вектора M1 M2
(начало находится в точке M1 (x1 , y1 , z1 ), а конец – в точке M2 (x2 , y2 , z2 )),
то его координаты находят по правилу
x
−
x
2
1
−−−−→
M1 M2 = y2 − y1
z2 − z1
(из координат конца вычитают координаты начала).
5
5.2.
Скалярное произведение векторов в R3
Скалярным произведением (~a, ~b) векторов ~a, ~b ∈ R3 называется вещественное число, равное произведению длин векторов на косинус угла
между ними:
c
(~a, ~b) = |~a| · |~b| cos(~a, ~b).
Для скалярного произведения используются также обозначения:
< ~a, ~b > или ~a · ~b.
Ясно, что если векторы ~a и ~b перпендикулярны (ортогональны), то
выполняется условие
(~a, ~b) = 0.
π
(Угол между векторами равен ).
2
Кроме того, если хотя бы один из векторов нулевой, то скалярное произведение таких векторов также равно нулю, поскольку длина нулевого
вектора равна нулю.
Свойства скалярного произведения векторов:
1. (~a, ~a) ≥ 0, (~a, ~a) = |~a|2 = 0 ⇔ ~a = ~0.
2. (~a, ~b) = (~b, ~a).
3. (λ~a, ~b) = λ(~a, ~b), (~a, λ~b) = λ(~a, ~b), где λ ∈ R.
3
4. (~a + ~b, ~c) = (~a, ~c) + (~b, ~c), где ~a, ~b, ~c ∈ R
.
a1
b1
~
Если известны координаты векторов ~a = a2 , b = b2 , то скалярное
b3
a3
произведение векторов ~a и ~b находят по правилу
(~a, ~b) = a1 b1 + a2 b2 + a3 b3 .
Из определения скалярного произведения следует правило нахождения косинуса угла между векторами:
(~a, ~b)
c
cos(~a, ~b) =
.
|~a| · |~b|
c
Зная cos(~a, ~b), можно найти угол между векторами ~a и ~b.
1
Для произвольного вектора ~a рассмотрим вектор ~a0 = ~a. Ясно, что
|~a|
длина вектора ~a0 равна 1. Такой вектор называется ортом вектора ~a, а
переход от вектора ~a к вектору ~a0 называется нормированием вектора ~a.
6
a1
~
Рассмотрим произвольный вектор ~a = a1~i + a2~j + a3 k = a2 .
a3
Углы, которые образует этот вектор с координатными осями OX, OY
и OZ, обозначим α, β и γ (рис. 5.4).
Числа cos α, cos β и cos γ называютZ
ся направляющими косинусами вектора
~a. Нетрудно показать (покажите самостоγ ~a
ятельно), что
~k
a
a
a
β
cos(α) = 1 , cos(β) = 2 , cos(γ) = 3 ,
α
|~a|
|~a|
|~a|
т. е. cos α, cos β и cos γ являются координатами орта ~a0 вектора ~a:
cos(
α)
~a
~a0 =
= cos(β) .
|~a|
cos(γ)
При этом
~i
O
~j
Y
X
Рис. 5.4
cos2 α + cos2 β + cos2 γ = 1.
~b
~b
Пр~a~b ~a
Рис. 5.5
~b
~a
Пр~a~b
Рис. 5.6
Пр~a~b
~a
Рис. 5.7
Число Пр~a~b, определяемое по правилу
c
Пр~a~b = |~b| cos(~a, ~b),
называют проекцией вектора ~b на вектор ~a. Для ненулевых векторов проc
екция положительна, если угол (~a, ~b) острый (рис. 5.5), отрицательна, если
c
угол (~a, ~b) тупой (рис. 5.6), и равна нулю, если угол между векторами прямой (рис. 5.7).
При этом
(~a, ~b) = |~a| · Пр~a~b = |~b| · Пр~b~a.
7
Если ~b – нормированный вектор (|~b| = 1), то скалярное произведение
вектора ~a на вектор ~b есть проекция вектора ~a на вектор ~b:
(~a, ~b) = Пр~b~a.
Пример 5.1. Длина вектора ~a равна 6, угол между векторами ~a и
~b равен 2π , скалярное произведение векторов ~a и ~b равно (−12). Найти
3
длину вектора ~b.
Решение. Из определения скалярного произведения следует, что
|~b| =
(~a, ~b)
.
c~
|~a| cos(~a, b)
Используя данные из условия примера, получим
−12
−12
= 4.
=
6
·
(−0.5)
6 · cos( 2π
)
3
−1
−5
Пример 5.2. Даны векторы: ~a = −5, ~b = 2 .
−3
3
Найти вектор ~c = −~a − 3~b, скалярные произведения (~a, ~b), (~b, ~c) и
длины векторов ~a, ~b.
Решение. По правилу умножения вектора на число получим
1
15
~
−~a = 5 , −3b = −6 ,
3
−9
|~b| =
по правилу сложения векторов:
1 + 15
16
~c = 5 − 6 = −1 .
3−9
−6
Найдем скалярные произведения:
(~a, ~b) = −1 · (−5) + (−5) · 2 + (−3) · 3 = −14,
(~b, ~c) = −5 · 16 + 2 · (−1) + 3 · (−6) = −100.
Скалярное произведение (~b, ~c) можно найти, используя свойства скалярного произведения:
(~b, ~c) = (~b, −~a − 3~b) = (~b, −~a) + (~b, −3~b) = −(~b, ~a) − 3(~b, ~b) =
8
2
= −(~a, ~b) − 3|~b| = 14 − 3((−5)2 + 22 + 32 ) = −100.
Найдем длины векторов:
q
q
√
√
2
2
2
2
2
2
~
|~a| = (−1) + (−5) + (−3) = 35, |b| = (−5) + 2 + 3 = 38.
−3
5
~
Пример 5.3. Даны векторы: ~a = −15 , b = −2 .
−9
−3
√
Известно, что длина вектора ~x равна 35, вектор ~x коллинеарен вектору ~a и образует тупой угол с вектором ~b. Найти координаты вектора
~x.
Решение. Так как искомый вектор ~x коллинеарен вектору ~a, то их
координаты
т. е. существует такое число λ, что
пропорциональны,
−3λ
~x = λ~a = −15λ . Следовательно,
−9λ
q
√
|~x| = |λ~a| = |λ||~a| = |λ| (−3)2 + (−15)2 + (−9)2 = |λ| 315.
√
Из условия известно, что |~x| = 35, значит, выполняется равенство
√
√
1
|λ| 315 = 35, или 315λ2 = 35. Отсюда получаем λ2 = , т. е. λ принимает
9
1
1
одно из двух значений: или − . Чтобы выбрать правильно значение λ,
3
3
воспользуемся еще одним условием задачи: угол между векторами ~x и ~b
– тупой. Это означает, что косинус угла отрицательный, следовательно,
скалярное произведение (~x, ~b) должно быть тоже отрицательно.
−1
1
Если λ = , то ~x = −5 , при этом
3
−3
(~x, ~b) = −1 · 5 + (−5) · (−2) + (−3) · (−3) = 14 > 0,
1
1
т. е. не удовлетворяет требованию. Значит, λ = − и ~x = 5 . Проверим
3
3
знак скалярного произведения:
(~x, ~b) = 1 · 5 + 5 · (−2) + 3 · (−3) = −14 < 0,
что соответствует требованию.
5
7
3
~
Пример 5.4. Даны векторы: ~a = −4 , b = −4 , ~c = −6 .
2
2
1
9
Известно, что вектор ~x ортогонален векторам ~a и ~b, а скалярное произведение (~x, ~c) = 8. Найти вектор ~x.
x1
Решение. Пусть искомый вектор ~x = x2 .
x3
Используя условие ортогональности векторов, имеем (~x, ~a) = 0 и
(~x, ~b) = 0. Добавляя к этим равенствам равенство (~x, ~c) = 8 из условия,
получаем систему из трех линейных уравнений с тремя неизвестными:
5x1 − 4x2 + 2x3 = 0,
7x − 4x2 + 2x3 = 0,
1
3x1 − 6x2 + x3 = 8.
Решая систему методом Гаусса–Жордана, получаем единственное
ре
0
шение: x1 = 0, x2 = −2, x3 = −4, т. е. искомый вектор ~x = −2 .
−4
Замечание. В некоторых задачах все рассматриваемые векторы
лежат в одной плоскости. Если выбрать систему координат так, чтобы данная плоскость совпадала с координатной, например с плоскостью
OXY , тогда одна из координат всех векторов будет равна нулю. Любой
вектор определяется двумя координатами, а третью можно не писать.
Множество всех векторов, лежащих
обозначают R2 .
в одной плоскости,
b
a
При этом для любых векторов ~a = 1 и ~b = 1 :
b2
a2
(~a, ~b) = a1 b1 + a2 b2 ,
q
|~a| = a21 + a22 .
−→
3
,
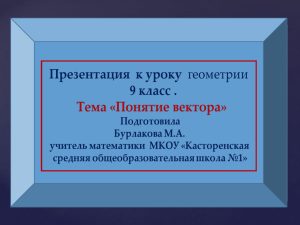
Пример 5.5. Дан треугольник 4ABC, известно, что AB =
−4
−−→
1
BC =
. Найти высоту CH треугольника 4ABC (рис. 5.8).
5
Решение.
−→
−−→
−→
−→
\
−3
Пусть угол ϕ = BA, BC, где BA = −AB =
.
4
Тогда
−→ −−→
−→
−−→
(BA, BC)
\
cos ϕ = cos(BA, BC) = −→ −−→ =
|BA||BC|
10
−3 · 1 + 4 · 5
17
√
=√
= √ .
9 + 16 1 + 25 5 26
Треугольник 4BCH – прямоугольный, поэтому
BH
. Отсюда
cos ϕ =
BC
√
17
17
BH = BC · cos ϕ = 26 √ = .
5
5 26
По теореме Пифагора CH 2 = s
BC 2 − BH 2 , следова 2
19
17
= .
тельно, искомая высота CH = 26 −
5
5
5.3.
C
ϕ
A
H
B
Рис. 5.8
Векторное произведение векторов в R3
Векторным произведением ~a × ~b векторов
~a, ~b ∈ R3 называется такой вектор ~c ∈ R3 , что
1) вектор ~c ортогонален векторам ~a и ~b;
c
2) |~c| = |~a||~b| sin(~a, ~b);
3) векторы ~a, ~b, ~c образуют правую тройку.
Векторное произведение обозначается
~c
также [~a, ~b].
Из определения векторного произведеB
ния следует, что ~a × ~b = ~0, если векторы ~a
~b
и ~b коллинеарны или хотя бы один из них –
A
нулевой вектор.
~a
Длина вектора, являющегося векторD
~
ным произведением векторов ~a и b, численно
Рис. 5.9
равна площади параллелограмма, построенного на этих векторах (рис. 5.9):
C
c
SABCD = |~a||~b| sin(~a, ~b) = |~a × ~b| = |~c|.
Свойства векторного произведения векторов:
1. ~a × ~b = −(~b × ~a).
2. (λ~a) × ~b = ~a × (λ~b) = λ(~a × ~b) для любого числа λ.
3. (~a + ~b) × ~c = ~a × ~c + ~b × ~c и ~a × (~b + ~c) = ~a × ~b + ~a × ~c ,
где ~a, ~b, ~c ∈ R3 .
b1
a1
~
Если известны координаты векторов: ~a = a2 и b = b2 , то их
a3
b3
11
векторное произведение вычисляется по формуле
~i a1 b1
~i ~j ~k
~a × ~b = det ~j a2 b2 = det a1 a2 a3 .
~k a3 b3
b1 b2 b3
3
1
~
Пример 5.6. Даны векторы: ~a = −1 , b = 2 .
2
−1
Найти: 1) ~a × ~b; 2) (2~a + ~b) × ~b; 3) (~a − 3~b) × (~a − ~b).
Решение. 1) Векторное произведение векторов ~a и ~b найдем, вычислив
определитель матрицы
~i 3 1
~a × ~b = det ~j −1 2 = −3~i + 5~j + 7~k.
~k 2 −1
2) Используя свойства векторного произведения, получим:
−3
−6
~
~
~
~
~
~
~
(2~a + b) × b = 2(~a × b) + (b × b) = 2(~a × b) + ~0 = 2(~a × b) = 2 5 = 10 .
7
14
3) Аналогично получаем
(~a − 3~b) × (~a − ~b) = (~a × ~a) − (~a × ~b) − 3(~b × ~a) + 3(~b × ~b) =
−6
~
~
~
~
~
= 0 − (~a × b) + 3(~a × b) + 30 = 2(~a × b) = 10 .
14
Пример 5.7. Даны точки: A(−3, 6, −2), B(−1, 4, −3), C(−7, 9, 5).
Найти площадь треугольника 4ABC и высоту, опущенную из вершины C
(рис. 5.10).
Решение.
−→ −→
Построим векторы AB и AC
ихкоординаты,
используя ко и найдем
−→ 2 −→ −4
ординаты точек A, B, C: AB = −2 , AC = 3 .
−1
7
Треугольник 4ABC можно рассматривать как треугольник, построенный
−→ −→
на векторах AB и AC. Следовательно, площадь треугольника численно
−→ −→
равна половине длины вектора AB × AC.
12
Найдем векторное произведение:
~i 2 −4
−→ −→
AB × AC = det ~j −2 3 = −11~i − 10~j − 2~k.
~k −1 7
C
Значит,
A
H
B
1 −→ −→
S4ABC = |AB × AC| =
2
q
Рис. 5.10
1
1√
15
=
(−11)2 + (−10)2 + (−2)2 =
225 = .
2
2
2
1
С другой стороны, S4ABC = · AB · CH, где CH – искомая высота
2
треугольника; AB – основание, на которое она опущена:
√
−→
AB = |AB| = 4 + 4 + 1 = 3.
Следовательно, CH =
2
2 15
S4ABC = ·
= 5.
AB
3 2
2π
c
Пример 5.8. Известно, что |~a| = 1, |~b| = 2, (~a, ~b) =
.
3
Найти длины следующих векторов: 1) ~a × ~b; 2) (~a + 3~b) × (3~a − ~b).
Решение. 1) Из определения векторного произведения имеем
√
3 √
2
π
c
=2·
= 3.
|~a × ~b| = |~a||~b| sin(~a, ~b) = 1 · 2 · sin
3
2
2) Пользуясь свойствами векторного произведения, получим
(~a + 3~b) × (3~a − ~b) = 3(~a × ~a) − (~a × ~b) + 9(~b × ~a) − 3(~b × ~b) =
= 3 · ~0 − (~a × ~b) − 9(~a × ~b) − 3 · ~0 = −10(~a × ~b).
Значит,
√
~
~
~
~
|(~a + 3b) × (3~a − b)| = | − 10(~a × b)| = | − 10||~a × b| = 10 3.
π
c
Пример 5.9. Известно, что |~a| = |~b| = 5, (~a, ~b) = . Вычислить
4
площадь треугольника, построенного на векторах (~a − 2~b) и (3~a + 2~b).
Решение. Площадь искомого треугольника равна половине площади
параллелограмма, построенного на векторах (~a − 2~b) и (3~a + 2~b).
Используя определение векторного произведения, получим
1
S4 = |(~a − 2~b) × (3~a + 2~b)|.
2
13
Используя свойства, преобразуем векторное произведение
(~a − 2~b) × (3~a + 2~b) = 3(~a × ~a) + 2(~a × ~b) − 6(~b × ~a) − 4(~b × ~b) =
= 2(~a × ~b) + 6(~a × ~b) = 8(~a × ~b).
Следовательно,
√
√
1
1
π
2
1
c~
~
~
= 50 2.
S4 = |8(~a × b)| = · 8|~a||b| sin(~a, b) = · 8 · 5 · 5 · sin = 100 ·
2
2
2
4
2
5.4.
Смешанное произведение векторов в R3
Смешанным произведением векторов ~a, ~b, ~c ∈ R3 называется число,
равное скалярному произведению вектора ~a на векторное произведение
векторов ~b и ~c:
(~a, ~b × ~c).
Смешанное произведение векторов (~a, ~b × ~c) обозначают также ~a · ~b · ~c.
Геометрический смысл смешанного произведения векторов:
модуль смешанного произведения векторов ~a, ~b, ~c равен объему V параллелепипеда, построенного на этих векторах (рис. 5.11):
|(~a, ~b × ~c)| = V.
~c
~b
~a
Рис. 5.11
Если
векторов:
координаты
известны
c1
b1
a1
~
~a = a2 , b = b2 , ~c = c2 , то их смешанное
c3
b3
a3
произведение равно определителю матрицы, элементами которой являются координаты векторов
~a, ~b, ~c:
a1 b1 c1
a1 a2 a3
(~a, ~b × ~c) = det a2 b2 c2 = det b1 b2 b3 .
a3 b3 c3
c1 c2 c3
Свойства смешанного произведения векторов:
1. Три вектора ~a, ~b, ~c компланарны тогда и только тогда, когда
(~a, ~b × ~c) = 0.
2. При вычислении смешанного произведения векторы ~a, ~b, ~c можно
циклично переставлять: (~a, ~b × ~c) = (~b, ~c × ~a) = (~c, ~a × ~b).
3. (~a, ~b × ~c) = (~a × ~b, ~c).
14
Пример 5.10. Даны точки: A(−3, 2, −2), B(1, 2, −3), C(−5, 1, 5),
D(1, 4, −16). Определить, лежат ли эти точки в одной плоскости.
−→ −→ −−→
Решение.
Построим
векторы
AB, AC, AD и найдем их координаты:
−→ 4 −→ −2 −−→ 4
2 .
AB = 0 , AC = −1 , AD =
−1
7
−14
−→ −→ −−→
Остается определить, компланарны ли векторы AB, AC, AD. Если
они компланарны, то точки A, B, C, D лежат в одной плоскости. В противном случае точки не лежат в одной плоскости. Компланарность векторов
проверим, используя смешанное произведение векторов:
4
−2
4
−→ −→ −−→
(AB, AC × AD) = det 0 −1 2 = 0.
−1 7 −14
Поскольку смешанное произведение векторов равно нулю, векторы
−→ −→ −−→
AB, AC, AD компланарны, а значит, точки A, B, C, D лежат в одной плоскости.
Пример 5.11. Даны точки: A(1, 7, 3), B(−5, 6, 5), C(5, 6, −4),
D(3, 6, 8). Найти объем пирамиды с вершинами в заданных точках (рис.
5.12).
−→ −→ −−→
Решение.
Построим
векторыAB, AC, AD и найдем их координаты:
−→ −6 −→ 4 −−→ 2
AB = −1 , AC = −1 , AD = −1 .
2
−7
5
Объем пирамиды ABCD – это шестая часть объ−→
D
ема параллелепипеда, построенного на векторах AB,
−→ −−→
AC, AD. Используя геометрический смысл смешанного произведения векторов, получим
1 −→ −→ −−→
C
B
VABCD = |(AB, AC × AD)| =
6
−6
4
2
A
1
1
= det −1 −1 −1 = |102| = 17.
6
6
Рис. 5.12
2 −7 5
5.5.
Упражнения
5.1. Точки K(2, −4), M (6, 1), N (−2, 3) – середины сторон треугольника
ABC. Найдите координаты вершин треугольника.
5.2. Точка M (2, 2) – точка пересечения диагоналей параллелограмма
ABCD. Известны координаты двух его вершин: A(−2, 6), B(2, 8). Найдите
координаты вершин C и D.
15
5.3. Даны две точки на плоскости: точка A(3, −3) и точка M , лежащая на
оси OX. Расстояние между этими точками равно 5. Найдите координаты
точки M .
5.4. Даны точки на плоскости: A(−3, 5), B(4, −6), C(2, 2). Найдите координаты точки D, равноудаленной
A, B, C.
от точек
3
−1
5.5. Даны векторы ~a = 2, ~b = 3 . Найдите скалярное произведение
1
−5
векторов ~a и ~b и угол между
векторами.
4
−3
~
5.6. Даны векторы ~a = −3 , b = 1 . Найдите скалярное произведе2
5
ние векторов 3~a − ~b и ~a
+ 2~b.
3
x
~
5.7. Даны векторы ~a = −2 , b = 3 . При каком значении x скалярное
1
−8
~
произведение векторов
~aи b равно 2?
−2
5.8. Дан вектор ~a = x . При каком значении x длина вектора ~a равна 7?
3
2
3
~
5.9. Даны векторы ~a = −1, b = x. При каком значении x вектор ~a
3
4
ортогонален вектору ~b?
3
x
5.10. Даны векторы ~a = 4 , ~b = y . При каких значениях x и y
−2
4
векторы ~a и ~b коллинеарны?
−3
−1
−9
~
~
5.11. Даны векторы ~a = 1 , b = 2 , ~c = 7 . Найдите вектор d,
2
4
4
~
~
коллинеарный вектору ~a, такой,
что вектор
d + ~c ортогонален вектору b.
3
1
~
5.12. Даны векторы ~a = −2 , b = −2. Найдите: а) |~a|, б) |~b|, в) (~a, ~b),
2
6
[
г) Пр~b~a, д) Пр~a~b, е) cos (~a, ~b), ж) направляющие косинусы вектора ~a.
4
3
5.13. Даны векторы ~a = 1 , ~b = 0 . Найдите Пр~a~b и направляющие
−2
−4
16
косинусы вектора ~a.
5.14. Вектор ~a образует с осями OX, OY , OZ углы, соответственно
равные
3
√
2π π π
, , . Докажите, что вектор ~a перпендикулярен вектору ~b = 3 2.
3 4 3
−3
π π
5.15. Вектор ~a образует углы ,
с осями OX и OZ соответственно.
4 3
Какой угол образует вектор ~a с осью OY ?
5.16. Длина вектора ~a равна 7, длина вектора ~b равна 8, угол между этими
5π
векторами равен
. Найдите скалярное произведение векторов ~a и ~b.
6
5.17. Длина вектора ~a равна 3, скалярное произведение векторов ~a и ~b
равно 6, угол между этими векторами равен arccos(0.4). Найдите длину
вектора ~b.
5.18. Длина вектора ~a равна 4, длина вектора ~b равна 3, угол между этими
2π
векторами равен
. Найдите: а) скалярное произведение векторов 3~a − 2~b
3
~
и ~a + 2b; б) длину вектора 3~a − ~b.
5.19.* Длины векторов ~a и ~b равны 1, угол между этими векторами равен
2π
. Найдите проекцию вектора 2~a − ~b на вектор ~a + ~b.
3
5.20.* Длина вектора ~a равна 2, длина вектора ~b равна 3, угол между
π
этими векторами равен . Найдите острый угол между диагоналями па6
раллелограмма, построенного на векторах ~a и ~b.
5.21. Длина вектора ~a равна 12, длина вектора ~b равна 3. При каких значениях λ векторы ~a − λ~b и ~a + λ~b перпендикулярны.
−1
~
5.22. Найдите векторное произведение векторов ~a и b, если а) ~a = −3,
2
−2
1
−1
~b = −8; б) ~a = 1 , ~b = 5 .
4
4
−3
−1
2
~
5.23. Даны векторы ~a = −2 , b = 1. Найдите единичный вектор,
2
2
~
перпендикулярный векторам
~aи b.
3
−2
~
5.24. Даны векторы ~a = 2 , b = 4 . Найдите вектор, перпендику−6
4
√
лярный векторам ~a и ~b, длина которого равна 3 5.
17
1
2
1
~
5.25. Даны векторы ~a = 2, b = 3, ~c = −2 . Известно, что вектор ~x
3
5
1
ортогонален векторам ~a и ~b, а скалярное произведение (~x, ~c) = 4. Найдите
вектор ~x.
−1
−2
~
5.26. Даны векторы ~a = 2 , b = −1. Найдите площадь треугольни1
4
ка, построенного на векторах ~a и ~b.
π
c
5.27. Известно, что |~a| = 5, |~b| = 2, (~a, ~b) = .
6
~
Найдите длины векторов: а) ~a × b, б) (2~a + ~b) × (3~a − 4~b).
π
c
5.28. Известно, что |~a| = 1, |~b| = 2, (~a, ~b) = , m
~ = ~a − 2~b, ~n = 4~a + ~b.
3
Найдите скалярное произведение векторов m
~ и ~n и длину вектора
m
~ × ~n.
3π
c
5.29. Известно, что |~a| = 2, |~b| = 4, (~a, ~b) =
,m
~ = 3~a + ~b, ~n = 4~a − ~b.
4
Найдите площадь параллелограмма, построенного на векторах m
~ и ~n.
π
c
5.30. Известно, что |~a| = 1, |~b| = 3, (~a, ~b) = , m
~ = 2~a − 3~b, ~n = 3~a + ~b.
3
Найдите площадь треугольника, построенного на векторах m
~ и ~n.
5.31. Даны точки A(−1, 2, 0), B(3, 1, −2), C(−2, 4, 1). Найдите вектор,
перпендикулярный треугольнику ABC.
5.32. Даны точки: A(−1, −1, 3), B(2, −5, 3), C(−3, −2, 1). Найдите площадь треугольника ABC.
5.33. Даны точки: A(−2, 9, −3), B(−6, 3, 5), C(−4, 4, 3). Найдите площадь
треугольника с вершинами в этих точках и высоту, опущенную из вершины A.
5.34. Найдите единичный вектор, перпендикулярный треугольнику ABC,
если:
а) A(−1, 3, −5), B(4, −2, 1), C(1, −4, 2);
б) A(3, 2, 1), B(−1, −2, 0), C(3, 1, 2).
5.35. Даны точки A(−3, 1, 2), B(0, 1, −1), C(−4, −1, 2). Найдите вектор,
перпендикулярный треугольнику
ABC,
которого
равна 6.
длина
1
2
2
~
5.36. Даны векторы ~a = 2 , b = 1 , ~c = −2 . Найдите смешанное
2
−2
1
произведение векторов ~a, ~b, ~c.
18
3
2
2
~
5.37. Даны векторы ~a = −2, b = 1, ~c = −1 . Найдите объем
1
3
1
параллелепипеда, построенного на векторах ~a, ~b, ~c.
−2
−2
5.38. Определите, компланарны ли векторы: ~a = 4 , ~b = 1 ,
−1
6
0
~c = −1 .
−5
1
1
~
5.39. Определите, при каком значении λ векторы ~a = 2 , b = 0,
3
1
λ
~c = 1 компланарны.
0
1
−1
1
~
~
5.40. Найдите Пр~c(~a × b), если: а) ~a = −2 , b = 1 , ~c = −1;
3
2
3
−1
−2
−1
б) ~a = 1 , ~b = −1, ~c = 2 .
−3
2
−2
5.41. Даны точки: A(−3, 2, −2), B(1, 2, −3), C(−5, 1, 5), D(0, −2, −2). Определите, лежат ли эти точки в одной плоскости.
−→
5.42. Найдите объем треугольной призмы, построенной на векторах AB,
−→ −−→
AC, AD, если A(−2, 1, 3), B(−3, 0, 1), C(1, −4, 2), D(−3, 5, 0).
5.43. Найдите объем пирамиды с вершинами:
а) A(−1, 1, −5), B(4, −2, 1), C(1, −4, 2), D(−4, 2, 0);
б) A(2, −4, −8), B(15, −8, 0), C(−9, 4, −12), D(0, −3, 1).
5.44. Найдите длину высоты пирамиды ABCD, опущенной из вершины
D, если A(2, 6, 4), B(1, 5, 2), C(3, 4, 3), D(4, 7, 1).
5.6.
Ответы
5.1. A(−6, −2), B(10, −6), C(2, 8). 5.2. C(6, −2), D(2, −4). 5.3. M (7, 0)
16
2
или M (−1, 0). 5.4. D(−5, −4). 5.5. −2, arccos(− √ ). 5.6. −8. 5.7. .
3
7 10
5.8. x = 6 или x = −6. 5.9. x = 18. 5.10. x = −6, y = −8.
19
9
19
19
3
2
19
, д)
, е)
, ж) , − ,
5.11. d~ = −3. 5.12. а)7, б) 3, в) 19, г)
3
7
21
7
7
−6
√
6
20
4
1
2
π
2π
. 5.13. √ , √ , √ , − √ . 5.15. или
. 5.16. −28 3. 5.17. 5.
7
3
3
21
21
21
21
√
5
5.18. a) −12, б) 98. 5.19. 0.5. 5.20. arccos( √ ). 5.21. 4, −4.
61
4
−23
2
2
1 2
2
1
5.22. а) 2 , б) −2 . 5.23. − ~i + ~j + ~k, ~i − ~j − ~k. 5.24. 6~i + 3~k,
3
3
3 3
3
3
5
−11
√
√
110
. 5.27. a) 5, б) 55. 5.28. 11, 9 3.
−6~i − 3~k. 5.25. ~i − 2~j − ~k. 5.26.
2
√
√
√
33 3
221
5.29. 28 2. 5.30.
. 5.31. 3~i − 2~j + 7~k. 5.32.
. 5.33. S = 6,
4
2
23 ~
25 ~
5
4
4
7 ~
i− √
j−√
k, б) − √ ~i + √ ~j + √ ~k.
h = 4. 5.34. а) √
1203
1203
1203
57
57
57
~
~
~
~
~
~
5.35. 4i + 2j − 4k, −4i − 2j + 4k. 5.36. 21. 5.37. 0. 5.38. Нет. 5.39. λ = −1.
5
43
145
6
5.40. а) − √ , б) −3. 5.41. Нет. 5.42. . 5.43.
, 1174. 5.44. √ .
3
6
11
3
6.
ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ ГЕОМЕТРИИ
В аналитической геометрии рассматриваются геометрические объекты (множества точек) и способы их задания в заранее выбранной системе
координат.
6.1.
Уравнение прямой на плоскости
Выберем на плоскости некоторую декартову прямоугольную систему
координат OXY .
Любая прямая, лежащая в плоскости, задается уравнением
Ax + By + C = 0,
где A и B одновременно не обращаются в ноль, которое называется общим
уравнением прямой.
Каждую прямую, которая образует с осью OX некоторый угол α, не
π
равный (рис. 6.1), можно задать также с помощью уравнения
2
y = kx + b,
20
при этом k = tg α называется угловым коэффициентом прямой. Если прямая параллельно оси OX, то угол α принимается равным нулю.
Уравнение y = kx + b называют уравнением прямой с угловым коэффициентом.
Пусть две прямые заданы уравнениями:
y = k1 x + b1 ,
y = k2 x + b2 .
Y
Условием параллельности прямых служит равенство их угловых коэффициентов:
b
α
k1 = k2 .
O
Прямые перпендикулярны тогда и только тогда, когда выполняется равенство
Рис. 6.1
X
k1 · k2 = −1.
Заметим, что если в общем уравнении прямой коэффициент B 6= 0, то
прямую можно задать уравнением с угловым коэффициентом. Если
C
B = 0, то уравнением Ax + C = 0 (x = a, где a = − ) задается прямая,
A
параллельная оси OY .
6.2.
Уравнение плоскости
Выберем в пространстве некоторую декартову прямоугольную систему
координат OXY Z.
Любую плоскость P можно задать точкой M0 (x0 , y0 , z0 ), лежащейв этой
плоскости,
A
A
B
~
n
=
и ненулевым вектором ~n = B , перпендикуC
C
M0 (x0 , y0 , z0 )
лярным плоскости (рис. 6.2). Уравнение плосP
кости в этом случае записывается в виде
A(x − x0 ) + B(y − y0 ) + C(z − z0 ) = 0
Рис. 6.2
(A2 + B 2 + C 2 6= 0),
где (x, y, z) – координаты произвольной точки, лежащей в плоскости. При
этом вектор ~n называется нормальным вектором, или вектором нормали
этой плоскости.
Если в последнем уравнении раскрыть скобки и обозначить
D = −Ax0 − By0 − Cz0 , получится уравнение
21
Ax + By + Cz + D = 0,
называемое общим уравнением плоскости.
При любых значениях A, B и C (A2 +B 2 +C 2 =
6 0) это уравнение задаA
ет некоторую плоскость, для которой вектор ~n = B является вектором
C
нормали.
Пример 6.1. Написать уравнение плоскости P, проходящей через
точки A(4, −2, −3), B(−4, 3, −1), C(−2, 2, −1).
Решение.
Способ 1. Чтобы написать уравнение плоскости, достаточно найти
нормальный вектор плоскости и точку, лежащую
в плоскости.
−8
−6
−→
−→
Векторы AB = 5 и AC = 4 лежат
2
2
−→ −→
~n = AB × AC
в плоскости P (рис. 6.3). Их векторное произведе−→
ние – вектор, перпендикулярный векторам AB и
−→
B
C
AC, является нормальным вектором плоскости P.
P
A
Найдем его координаты:
Рис. 6.3
~i −8 −6
−→ −→
~n = AB × AC = det ~j 5 4 = 2~i + 4~j − 2~k.
~k 2 2
Согласно условию задачи известны 3 точки,
лежащие в плоскости. Для того чтобы написать уравнение плоскости, можно выбрать любую из них, например точку C(−2, 2, −1). Запишем уравнение плоскости:
2(x + 2) + 4(y − 2) − 2(z + 1) = 0.
Раскроем скобки и получим общее уравнение плоскости P:
2x + 4y − 2z − 6 = 0.
Способ 2. Пусть точка M (x, y, z) – произвольная точка искомой плос−−→ −→ −→
кости P. Тогда 3 вектора AM , AB и AC лежат в данной плоскости, т. е.
являются компланарными, и поэтому их смешанное произведение равно
нулю:
−−→ −→ −→
AM · AB · AC = 0.
22
−−→ −→
Если точка M не принадлежит плоскости P, то векторы AM , AB и
−→
AC не являются компланарными и равенство не выполняется. Таким образом, полученное уравнение является уравнением плоскости P. Запишем
это уравнение, используя координаты векторов:
x
−
4
−8
−6
−−→
−
→
−
→
AM = y + 2 , AB = 5 , AC = 4 .
z+3
2
2
Их смешанное произведение равно определителю матрицы, составленной из координат векторов, поэтому уравнение плоскости P преобразуется
к виду
x − 4 −8 −6
det y + 2 5 4 = 0.
z+3 2 2
Вычислив определитель, получим:
2(x − 4) + 4(y + 2) − 2(z + 3) = 0
или
2x + 4y − 2z − 6 = 0.
6.2.1.
Взаимное расположение двух плоскостей
Рассмотрим две плоскости P1 и P2 , заданные уравнениями
A1 x + B1 y + C1 z + D1 = 0,
A2 x + B2 y + C2 z + D2 = 0.
Взаимное расположение плоскостей удобно анализировать, используя
их нормальные векторы.
A1
A2
Обозначим через ~n1 = B1 , ~n2 = B2 нормальные векторы плосC1
C2
костей P1 и P2 соответственно.
23
~n2
P2
~n1
~n2
α
P2
~n2
α
~n1
P1
~n1
P1
P1
P2
Рис. 6.4
Рис. 6.5
Рис. 6.6
Если плоскости P1 и P2 перпендикулярны (рис. 6.4), то перпендикулярны их нормальные векторы ~n1 и ~n2 , поэтому условием перпендикулярности
плоскостей является равенство нулю скалярного произведения нормальных
векторов:
(~n1 , ~n2 ) = 0.
Если плоскости P1 и P2 параллельны (рис. 6.5), то их нормальные
векторы ~n1 и ~n2 коллинеарны:
~n1 = λ~n2 , где λ 6= 0.
Пусть плоскости P1 и P2 пересекаются и образуют двугранные углы
(рис. 6.6). Наименьший из этих углов называется углом между плоскостяπ
ми. Обозначим этот угол α = (P\
1 , P2 ) (0 ≤ α ≤ ). При этом справедлива
2
формула
(~n1 , ~n2 )
cos(P\
n\
n2 )| =
.
(6.1)
1 , P2 ) = cos(α) = | cos(~
1, ~
|~n1 ||~n2 |
Пример 6.2. Написать уравнение плоскости, параллельной плоскости −6x + 3y − 6z + 1 = 0 и проходящей через центр окружности
(x + 3)2 + (y − 2)2 = 5, лежащей в плоскости OXY .
Решение. По условию задачи плоскости должны быть параллельны,
значит, нормальные векторы этих плоскостей должны быть коллинеарны. Из заданного
плоскости получим нормальный вектор этой
уравнения
−6
плоскости: ~n = 3 . В качестве нормального вектора искомой плоско−6
2
сти можно взять этот вектор или коллинеарный ему вектор ~n1 = −1
2
(~n = −3~n1 ).
24
Точка, являющаяся центром окружности (x + 3)2 + (y − 2)2 = 5, лежит
в плоскости OXY . Ее координаты (−3, 2, 0). Используя вектор ~n1 и эту
точку запишем уравнение плоскости:
2(x + 3) − (y − 2) + 2(z − 0) = 0.
Раскроем скобки и получим общее уравнение искомой плоскости:
2x − y + 2z + 8 = 0.
Пример 6.3. Найти угол между плоскостями P1 и P2 , уравнения
которых соответственно −x + y + 2 = 0 и x − 2y − 2z + 3 = 0.
Решение. Запишем нормальные векторы плоскостей P1 и P2 соответственно:
−1
1
~n1 = 1 , ~n2 = −2 .
0
−2
Найдем косинус угла между плоскостями P1 и P2 , используя косинус
угла между этими векторами (формула (6.1)):
√
2
1
−3
(~
n
,
~
n
)
1
2
cos(P\
n\
n2 )| =
.
= √ =√ =
1 , P2 ) = | cos(~
1, ~
|~n1 ||~n2 |
2
3 2
2
√
π
2
)= .
Следовательно, угол между плоскостями (P\
1 , P2 ) = arccos(
2
4
6.3.
Уравнение прямой
Выберем в пространстве некоторую декартову прямоугольную систему
координат OXY Z.
Прямая однозначно задается, если известZ
ны точка M0 (x0 , y0 , z0 ), лежащая
на прямой,
k
k
d~ = l
и ненулевой вектор d~ = l , параллельный
m
m
M0 (x0 , y0 , z0 )
L
этой прямой (в частности, лежащий на прямой)(рис. 6.7).
O
Y
Такой вектор называется направляющим
X
вектором прямой. Координаты любой точки
M (x, y, z), лежащей на этой прямой, удовлеРис. 6.7
творяют уравнениям:
x − x0
y − y0
z − z0
=
=
,
k
l
m
25
которые называются каноническими уравнениями прямой, или так называемым параметрическим уравнениям прямой:
x = x0 + kt,
y = y0 + lt,
z = z0 + mt, t ∈ R.
Если прямая задана параметрическими уравнениями, то каждой точке
M (x, y, z), лежащей на прямой, соответствует некоторое значение параметра t.
Прямая в пространстве может быть также задана как линия пересечения двух плоскостей:
A1 x + B1 y + C1 z + D1 = 0,
A2 x + B2 y + C2 z + D2 = 0.
Пример 6.4. Написать уравнения прямой, проходящей через две заданные точки M1 (x1 , y1 , z1 ) и M2 (x2 , y2 , z2 ).
Решение. Чтобы написать уравнения прямой, необходимо знать точку, лежащую на прямой, и направляющий вектор этой прямой.
В задаче известны две точки, принадлежащие прямой. Можно выбрать
любую из них. Будем использовать точку M1 (x1 , y1 , z1 ). В качестве
направ
x
−
x
2
1
−−−−→
ляющего вектора искомой прямой возьмем вектор M1 M2 = y2 − y1 .
z2 − z1
Запишем канонические уравнения искомой прямой:
x − x1
y − y1
z − z1
=
=
.
x2 − x1
y2 − y1
z2 − z1
Параметрические уравнения прямой имеют вид
x = x1 + t(x2 − x1 ),
y = y1 + t(y2 − y1 ),
z = z1 + t(z2 − z1 ), t ∈ R.
Пример 6.5. Написать канонические уравнения прямой L, являющейся линией пересечения плоскостей P1 : x − 2y − z + 9 = 0 и
P2 : 4x − y + 3z + 8 = 0.
Решение. Способ 1. Координаты точек, лежащих на прямой L, удовлетворяют уравнениям обеих плоскостей, т. е. являются решениями системы линейных уравнений:
x − 2y − z = −9,
4x − y + 3z = −8.
26
Решим эту систему методом Гаусса–Жордана:
x y z
x y z
I
⇔ 1 −2 −1 −9
⇔
1 −2 −1 −9
4 −1 3 −8 +I · (−4)
0 7 7 28 : 7
x y z
x y z
⇔ 1 −2 −1 −9 +II · 2 ⇔ 1 0 1 −1 .
II
0 1 1 4
0 1 1 4
Система имеет бесконечно много решений. Найдем их. Зададим свободную неизвестную z = t, где t – произвольное число, и получим все
решения системы:
x = −1 − t,
y = 4 − t,
z = t,
t ∈ R.
Эта система представляет собой параметрические уравнения прямой
L. Задавая разные значения t получаем координаты точек, лежащих на
прямой. Например, значению t = 0 соответствует точка
M0 (−1, 4, 0). На−1
~
правляющим вектором прямой является вектор d = −1.
1
Тогда канонические уравнения прямой L можно представить в виде
x+1 y−4 z
=
= .
−1
−1
1
Способ 2. Запишем
нормальные
векторы плоскостей P1 и P2 соответ
1
4
ственно: ~n1 = −2, ~n2 = −1 .
−1
3
Векторное произведение векторов ~n1 и ~n2 яв~n1
ляется вектором, который ортогонален векторам
P2
~n1 и ~n2 , его можно поместить параллельным пе~n2
d~
реносом как в плоскость P1 , так и в плоскость P2 .
~
d
P1
Значит, он параллелен прямой L и, следовательно, является направляющим вектором этой пря- L
мой (рис. 6.8). Найдем координаты направляющего вектора:
Рис. 6.8
~i 1 4
d~ = ~n1 × ~n2 = det ~j −2 −1 = −7~i − 7~j + 7~k.
~k −1 3
27
Направляющим вектором прямой L является найденный вектор
~
d = −7~i − 7~j + 7~k, а также любой ненулевой коллинеарный ему вектор.
Например, в качестве направляющего вектора можно взять вектор
d~1 = −~i − ~j + ~k.
Координаты точки, принадлежащей прямой, – это любое решение системы уравнений
x − 2y − z = −9,
4x − y + 3z = −8.
Зададим z = 0. Относительно переменных x и y получится система
из двух уравнений, имеющая единственное решение x = −1, y = 4. Точка
M0 (−1, 4, 0) принадлежит прямой L.
Канонические уравнения этой прямой имеют вид
x+1 y−4 z
=
= .
−1
−1
1
6.3.1.
Взаимное расположение прямой и плоскости
Рассмотрим
в пространстве прямую L с направляющим вектором
k
x − x0
y − y0
z − z0
~
d = l :
=
=
k
l
m
m
A
и плоскость P с нормальным вектором ~n = B : Ax + By + Cz + D = 0.
C
Прямая L параллельна плоскости P (в частности, лежит в этой плоскости) (рис. 6.9) тогда и только тогда, когда векторы d~ и ~n перпендикулярны,
~ ~n) = 0.
т. е. (d,
Прямая L перпендикулярна плоскости P (рис. 6.10) тогда и только
тогда, когда векторы d~ и ~n коллинеарны (d~ = λ~n, λ 6= 0).
d~
L
~n
~n
d~
~n
~
β d
α
P
P
P
L
L
Рис. 6.9
Рис. 6.10
Рис. 6.11
Если векторы не перпендикулярны и не коллинеарны, то прямая L и
28
π
d
плоскость P пересекаются под некоторым углом α = (L
, P) (0 < α < )
2
(рис. 6.11), для нахождения которого можно использовать формулу
~
d
~ ~n)| = (d, ~n) .
sin(α) = | cos(β)| = | cos(d,
~ n|
|d||~
(6.2)
x−1 y+2 z−2
=
=
и
0
7
7
0
~
Решение. Запишем направляющий вектор прямой L: d = 7 и нор7
−1
мальный вектор плоскости P: ~n = 2 .
1
Согласно (6.2)
√
~
3
(
d,
~
n
)
21
d
~ ~n)| =
d
sin(L
, P) = | cos(d,
.
= √ √ =
~ n|
2
7 2 6
|d||~
Пример 6.6. Найти угол между прямой L:
плоскостью P: −x + 2y + z + 5 = 0.
Следовательно, искомый угол между прямой и плоскостью
√
3
π
d
(L
, P) = arcsin( ) = .
2
3
Пример 6.7. Исследовать взаимное расположение прямой L:
x = 2 − 4t,
y = t,
z = −3 + 2t, t ∈ R
и плоскости P: 5x − 6y + 2z + 18 = 0. Если они пересекаются, то найти
координаты точки пересечения.
Решение. Для исследования взаимного расположения прямойи плос
−4
кости будем использовать направляющий вектор прямой L: d~ = 1 и
2
5
нормальный вектор плоскости P: ~n = −6 .
2
Прямая L параллельна плоскости P или лежит в плоскости P тогда,
когда направляющий вектор d~ ортогонален нормальному вектору ~n, т. е.
29
скалярное произведение этих векторов равно нулю. Проверим выполнение
этого условия:
~ ~n) = −20 − 6 + 4 = −22 6= 0.
(d,
Условие не выполняется. Следовательно, прямая L не параллельна
плоскости P.
Прямая L перпендикулярна плоскости P в том случае, когда направляющий вектор d~ коллинеарен нормальному вектору ~n. Очевидно, это условие
также не выполняется:
d~ 6= λ~n.
Прямая L не перпендикулярна плоскости P.
Значит, прямая L пересекает плоскость P в точке M0 под некоторым
π
углом α (0 < α < ).
2
Поскольку точка M0 принадлежит как плоскости, так и прямой, то ее
координаты удовлетворяют как уравнению плоскости P, так и уравнениям
прямой L:
5x − 6y + 2z + 18 = 0,
x = 2 − 4t,
y = t,
z = −3 + 2t.
Найдем значение параметра t, соответствующее точке M0 , подставив
выражения для x, y и z в уравнение плоскости:
5(2 − 4t) − 6t + 2(−3 + 2t) + 18 = 0 ⇔ t = 1.
Задав t = 1 в уравнениях прямой, получим координаты точки пересечения плоскости P и прямой L: M0 (−2, 1, −1).
Пример 6.8. Найти точку K, симметричную точке M (−4, 8, 6) относительно плоскости P: x − 3y − z + 12 = 0.
Решение. Искомая точка K лежит на прямой L, проходящей
через
1
точку M перпендикулярно плоскости P (рис. 6.12). Вектор ~n = −3 (нор−1
мальный вектор плоскости P) является направляющим вектором прямой
L. Используя этот вектор и точку M напишем параметрические уравнения
прямой L:
x = −4 + t,
y = 8 − 3t,
z = 6 − t, t ∈ R.
30
Найдем координаты точки N , являющейся точкой
пересечения прямой L и плоскости P. Ее координаты
удовлетворяют уравнениям системы
P
x = −4 + t,
y = 8 − 3t,
z = 6 − t,
x − 3y − z + 12 = 0.
M
~n
N
K
L
Рис. 6.12
Определим значение параметра t, соответствующее точке N , подставив выражения для x, y и z в уравнение плоскости:
−4 + t − 3(8 − 3t) − (6 − t) + 12 = 0 ⇔ t = 2.
Отсюда x = −2, y = 2, z = 4. Следовательно, N (−2, 2, 4).
Точки M , N и K лежат на прямой L. Нетрудно заметить, что точка N является серединой отрезка M K. Зная координаты одного конца
M (−4, 8, 6) и середины N (−2, 2, 4) отрезка, можно найти координаты другого его конца. Координаты середины отрезка равны полусумме координат
его концов. Пусть K(xk , yk , zk ), тогда выполняются соотношения
−4 + xk
8 + yk
6 + zk
, 2=
, 4=
.
2
2
2
Решив уравнения, получим xk = 0, yk = −4, zk = 2. Значит, K(0, −4, 2).
x−2
y+3
z+7
Пример 6.9. Известно, что прямая L1 :
=
=
при1
−1
−2
x−2
y+5
z
надлежит плоскости P, а прямая L2 :
=
=
параллельна
0
−1
−1
этой плоскости. Написать уравнение плоскости P.
Решение. Из уравнений прямых L1 и L2 получим направляющие векторы этих прямых:
1
0
~n
d~1 M1
d~1 = −1 , d~2 = −1 .
P
d~2
−2
−1
−2 =
Поскольку прямая L1 принадлежит плоско- L1
L2
сти P, а прямая L2 параллельна этой плоскости,
то векторы d~1 и d~2 можно поместить в плоскость
P параллельным переносом (рис. 6.13). Векторное
Рис. 6.13
~
~
произведение векторов d1 и d2 – вектор, нормаль-
31
ный плоскости P. Найдем его координаты:
~i 1 0
~n = d~1 × d~2 = det ~j −1 −1 = −~i + ~j − ~k.
~k −2 −1
Точка M1 (2, −3, −7) принадлежит прямой L1 , а значит, и плоскости
P. Используя эту точку и вектор ~n напишем уравнение плоскости P:
−(x − 2) + (y + 3) − (z + 7) = 0.
Раскрыв скобки получим общее уравнение плоскости:
−x + y − z − 2 = 0.
6.4.
Упражнения
6.1. Напишите уравнение прямой, проходящей через точку M (−1, 3) параллельно прямой y = −4x + 1.
6.2. Напишите уравнение прямой, проходящей через точку M (2, −1) перпендикулярно прямой y = 2x − 5.
6.3. Напишите уравнения прямых, проходящих через точку M (1, −3) параллельно и перпендикулярно прямой y = 3x − 2.
6.4. Напишите уравнение прямой, проходящей через точки M (3, −2) и
N (5, −1).
6.5. Найдите точку пересечения прямых y = −x + 5, y = 3x + 9.
6.6. Найдите расстояние от точки M (−3, −2) до прямой y = −4x + 3.
6.7. Даны точка M (8, 2) и прямая y = −2x+3. Найдите точку пересечения
прямой, проходящей через заданную точку M перпендикулярно заданной
прямой.
6.8. Даны точка M (−3, 4) и прямая y = 3x + 2. Найдите точку N , являющуюся проекцией точки M на заданную прямую.
6.9. Даны координаты вершин треугольника ABC. Напишите уравнения
стороны AB, медианы CM , высоты CD. Вычислите площадь треугольника
ABC: а) A(3, 0), B(4, 2), C(−1, 1); б) A(2, 6), B(−2, 4), C(−4, 10).
6.10. Точки A(−3, −1) и B(2, 4) являются вершинами ромба. На прямой
y = −2x + 8 лежит одна из диагоналей ромба. Найдите площадь ромба.
6.11. Получите уравнение множества точек плоскости, расстояние от которых до точки A равно расстоянию до точки B, если A(−1, −4), B(2, 3).
6.12. Получите уравнение множества точек плоскости, расстояние от которых до точки A(−2, −4) меньше расстояния до точки B(−4, 6).
6.13. При каком значении a точка M (2, −1, a) лежит в плоскости
x + 2y − z + 5 = 0?
32
6.14.
x−1
2
6.15.
x+2
−1
6.16.
При каком значении a точка M (3, a, 1) лежит на прямой
y+1 z−3
=
=
?
−3
−2
При каких значениях a и b точка M (a, 3, b) лежит на прямой
y+3 z−1
=
=
?
2
−2
Напишите уравнение плоскости, проходящей
через
точку M (−1, 2, 4)
2
~
перпендикулярно вектору: а) ~i, б) ~j, в) k, г) ~n = 3 .
−1
6.17. Напишите уравнение плоскости, проходящей через точку M (−2, 3, −1)
x+1 y−1 z+2
перпендикулярно прямой
=
=
.
4
4
−2
6.18. Напишите уравнение плоскости, проходящей через точку M (−1, 4, −3)
параллельно векторам ~a = 4i − 7j + 5k и ~b = 3i − 5j + 4k.
6.19. Напишите уравнение плоскости, проходящей через точки M (−1, −4, 3)
и N (−3, 3, −4) параллельно вектору ~a = −i + 8j − 7k.
6.20. Напишите уравнение плоскости, проходящей через 3 заданные точки:
а) M1 (−2, 3, −1) , M2 (−1, 4, 2), M3 (2, 5, −1);
б) M1 (−3, 1, −1), M2 (−1, 2, 1), M3 (−4, 2, 0).
6.21. Напишите уравнение плоскости, которая пересекает координатные
оси OX, OY и OZ в точках M1 (2, 0, 0), M2 (0, 3, 0), M3 (0, 0, 5) соответственно. Постройте эту плоскость.
6.22. Напишите уравнение плоскости, которая пересекает координатные
оси OY и OZ в точках A(0, 2, 0), B(0, 0, 4) соответственно и проходит параллельно оси OX. Постройте эту плоскость.
6.23. Напишите уравнение плоскости, которая пересекает координатные
оси OX и OY в точках A(3, 0, 0), B(0, 1, 0) соответственно и проходит параллельно оси OZ. Постройте эту плоскость.
6.24. Напишите уравнение плоскости, которая проходит через ось OZ и
точку A(1, 3, 0). Постройте эту плоскость.
6.25. Напишите канонические и параметрические уравнения прямой, проходящей через точку M (1, 2, 3) перпендикулярно плоскости:
а) OXY ; б) OY Z; в) OXZ; г) x − 4y + 2z − 5 = 0.
6.26. Напишите канонические и параметрические уравнения прямой, проходящей через точку M (2, 0, 3) параллельно оси: а) OX; б) OY ; в) OZ.
6.27. Напишите канонические уравнения
прямой, проходящей через точку
x = −2 + t,
y = 2t,
M (1, −2, 0) параллельно прямой: а)
z = 1 − 3t, t ∈ R;
x+4 y−1 z+3
x − 3z + 2 = 0,
б)
=
=
; в)
2x − y + 4z − 3 = 0.
0
2
−1
33
6.28. Напишите канонические уравнения прямой, проходящей через точки
M (2, 3, −1) и N (−3, 2, −4).
6.29. Проверьте, лежат ли на одной прямой 3 данные точки: A(−3, 5, 4),
B(2, 4, 6), C(7, 3, 8).
x − y − z + 1 = 0,
6.30. Напишите канонические уравнения прямой
−3x − 2y + z + 2 = 0.
−x − 3y − 6 = 0,
6.31. Напишите параметрические уравнения прямой
2x + 5y − z + 2 = 0.
−4
6.32. Точка M (3, 1, 4) принадлежит прямой L, векторы ~a = 0 ,
1
−6
~b = 1 перпендикулярны этой прямой. Напишите канонические урав0
нения прямой L.
6.33. Установите взаимное расположение прямой
x+1 y−2 z+4
=
=
и плоскости P : 3x + y − 4z − 15 = 0.
L:
3
−1
2
6.34. При каком значении параметра a прямая
x + 10 y − 7 z + 2
L:
=
=
параллельна плоскости P : 5x−3y +4z = 1.
a
2
−6
y−3
z
x−3
=
=
лежит в
6.35. При каких значениях C и D прямая
2
−3
7
плоскости 2x − y + Cz + D = 0.
6.36. Установите взаимное расположение прямых L1 и L2 , заданных соответственно уравнениями
x−2 y
z + 1 x = 5 − 8t,
y = 4 − 6t,
= =
и
4
3
−2
z = 3 + 4t, t ∈ R.
6.37. Установите взаимное расположение прямых L1 и L2 , заданных соответственно уравнениями
x y−1 z+2
=
=
;
2
−3
1
x+4 y+3 z−1
=
=
.
3
2
4
6.38. Найдите координаты точки пересечения прямых, заданных уравнеx−1 y+1 z+4 x−4 y+4 z+1
ниями:
=
=
и
=
=
, или докажите, что
2
−1
−2
−3
2
1
эти прямые не пересекаются.
6.39. Найдите координаты точки пересечения прямых
x−1 y−2 z−3 x+2 y−4 z+1
=
=
и
=
=
.
1
2
4
3
−2
4
34
2x + 2y − z − 10 = 0,
6.40. Докажите, что прямая L1 :
и прямая
x − y − z − 22 = 0
x+7 y−5 z−9
L2 :
=
=
параллельны.
3
−1
4
6.41. Определите величины углов между осями координат и прямой
x−2 y+4 z−1
= √ =
.
L:
−1
1
2
6.42. √
Определите величины углов, которые образует плоскость
P:
3y − z − 4 = 0 с координатными плоскостями.
6.43. Найдите угол между плоскостями P1 и P2 :
а) P1 : 2x − 2z + 5 = 0, P2 : x + y + 3 = 0;
б) P1 : 3x + 2y − 6z + 1 = 0, P2 : x − 2y + 2z + 3 = 0.
6.44. Найдите угол между прямой L и плоскостью P:
x−3 y+2 z+4
а) L :
=
=
, P : −x + y − 2z − 4 = 0;
1
0
1
x−2 y+1 z−3
б) L :
=
=
, P2 : 3x − y − z + 3 = 0.
−2
1
2
6.45. Напишите уравнение прямой, проходящей через точку M0 (1, −2, 3)
x−5 y−4 z−3
перпендикулярно прямым L1 :
=
=
и
3
1
−2
x+2 y+4 z−1
L2 :
=
=
.
2
−5
4
6.46. Напишите уравнение плоскости, проходящей через точку M (3, −1, −4)
x−6 y−3 z+5
=
=
и
параллельно прямым L1 :
4
3
−3
x+1 y−4 z−2
L2 :
=
=
.
3
4
−1
6.47. Напишите уравнение плоскости, проходящей через прямую L1 :
x−6 y+3 z+1
x−1 y+2 z−5
=
=
параллельно прямой L2 :
=
=
.
1
−3
2
3
−2
−2
6.48. Напишите уравнение плоскости, проходящей через прямую
x−1 y
z+1
L:
= =
и точку M (0, 1, 2).
2
1
0
6.49. Напишите уравнение плоскости, проходящей через две параллельные
x+3 y−1 z−2
x+6 y−4 z−1
прямые: L1 :
=
=
и L2 :
=
=
.
−2
3
−3
6
−9
9
6.50. Напишите уравнение плоскости, проходящей через точку M (3, −1, −5)
перпендикулярно плоскостям 3x − 2y + 2z + 7 = 0 и 5x − 4y + 3z + 1 = 0.
x−1
y+1
z+2
6.51. Найдите точку пересечения прямой L :
=
=
и
2
−1
3
плоскости P : 2x + 3y − z − 5 = 0.
x−3
y+2
z−5
6.52. Найдите точки пересечения прямой L :
=
=
с
−1
2
5
координатными плоскостями.
35
6.53. Найдите точку, являющуюся проекцией точки M (1, −1, 2) на плоскость P : −x + 2y + z + 7 = 0.
6.54. Найдите координаты точки N , которая является проекцией точки
x+3 y−4 z+3
M (3, 8, 2) на прямую L :
=
=
.
4
−2
1
6.55. Найдите точку N , симметричную точке M (4, 3, 2) относительно плоскости P : x − y + 2z + 1 = 0.
6.56. Найдите точку N , симметричную точке M (5, 1, 2) относительно пряx−4 y+2 z+1
мой L :
=
=
.
2
3
1
6.57. Найдите расстояние от точки M (−2, −4, 3) до плоскости
P : 2x − y + 2z + 3 = 0.
6.58. Найдите расстояние от точки M (1, 2, 3) до прямой
x+2 y−1 z−4
L:
=
=
.
3
0
−1
6.59. Плоскости P1 и P2 заданы соответственно уравнениями:
−x − 2y + 2z − 8 = 0 и −2x − 4y + 4z + 20 = 0. Покажите, что эти плоскости
параллельны, и найдите расстояние между ними.
x+3
y−1
z−1
6.60. Найдите расстояние между прямыми L1 :
=
=
2
−1
1
x
=
−4t,
y = 3 + 2t,
и L2 :
z = 3 − 2t, t ∈ R.
6.61. Точка M (1, 2, −1) расположена посредине между параллельными
плоскостями P1 и P2 . Уравнение плоскости P1 известно: −x+y +2z −5 = 0.
Напишите уравнение плоскости P2 .
6.62. Точка M (1, −3, −2) расположена посредине между параллельными
x−7 y−3 z+8
прямыми L1 и L2 . Уравнения прямой L1 известны:
=
=
.
−1
−4
1
Напишите уравнения прямой L2 .
6.63. Напишите параметрические уравнения прямой L, проходящей через
точку M (2, 3, −4) параллельно плоскостям, которые заданы уравнениями:
−2x − 4y + 2z = 5 и x + 3y− 3z = 6.
x = 2,
y = −5 − t,
6.64. Даны прямая L :
и плоскость
z = −t, t ∈ R
P1 : −x + y − z − 2 = 0. Напишите уравнение плоскости P2 , перпендикулярной плоскости P1 , проходящей через прямую L.
x−4 y−2 z+2
6.65. Даны прямая L :
=
=
и плоскость
4
0
−2
P : x + 2y − z − 4 = 0. Напишите уравнения прямой, являющейся проекцией прямой L на плоскость P.
36
6.5.
Ответы
1
8
6.1. y = −4x − 1. 6.2. y = − 12 x. 6.3. y = 3x − 6, y = − x − .
3
3
√
6.4. −x + 2y + 7 = 0. 6.5. (−1, 6). 6.6. 17. 6.7. (2, −1). 6.8. (0.3, 2.9).
1
1
6.9. а) (AB) : y = 2x − 6, (CM ) : y = 1, (CD) : y = − x + , SMABC = 4.5;
2
2
1
5
б) (AB) : y = x + 5, (CM ) : y = − + 5, (CD) : y = −2x + 2, SMABC = 14.
2
4
6.10. S = 30. 6.11. 3x + 7y + 2 = 0. 6.12. −x + 5y − 8 < 0. 6.13. a = 5.
6.14. a = −4. 6.15. a = −5, b = −5. 6.16. а) x = −1, б) y = 2, в) z = 4,
г) 2x + 3y − z = 0. 6.17. 2x + 2y − z − 3 = 0. 6.18. −3x − y + z + 4 = 0.
6.19. −7x + 7y + 9z − 6 = 0. 6.20. а) −3x + 6y − z − 25 = 0,
x y z
y z
x y
б) −x−4y+3z+4 = 0. 6.21. + + = 1. 6.22. + = 1. 6.23. + = 1.
2 3 5
2 4
3 1
x
=
1,
x−1 y−2 z−3
y = 2,
6.24. y − 3x = 0. 6.25. а)
=
=
;
,
0
0
1
z = 3 + t, t ∈ R
x−1
y−2
z − 3 x = 1 + t,
y−2
z−3
x−1
y = 2,
=
=
;
=
=
;
б)
, в)
1
0
0
0
1
0
z = 3, t ∈ R
x = 1,
x−1
y−2
z − 3 x = 1 + t,
y = 2 + t,
y = 2 − 4t,
, г)
=
=
;
.
1
−4
2
z = 3, t ∈ R
z = 3 + 2t, t ∈ R
y
z − 3 x = 2 + t,
x−2
y
z−3
x−2
y = 0,
= =
;
, б)
= =
;
6.26. а)
1
0
0
0
1
0
z = 3, t∈ R
x = 2,
x−2 y
z − 3 x = 2,
y = t,
y = 0,
, в)
= =
;
.
0
0
1
z = 3, t ∈ R
z = 3 + t, t ∈ R
z
x−1 y+2
z
x−1 y+2
=
=
, б)
=
=
,
6.27. а)
1
2
−3
0
2
−1
x−1 y+2 z
x−2 y−3 z+1
в)
=
= . 6.28.
=
=
. 6.29. Лежат.
3
10
1
−1
−3
−5
x = 24 + 3t,
x y−1 z
y = −10 − t, .
6.30. =
= . 6.31.
3
−2
5
z = t, t ∈ R
x−3 y−1 z−4
6.32.
=
=
. 6.33. Прямая L лежит в плоскости P.
1
6
4
6.34. a = 6. 6.35. C = −1, D = −3. 6.36. Параллельны. 6.37. Скрещиπ π π
вающиеся. 6.38. (−5, 2, 2). 6.39. (1, 2, 3). 6.41. , , .
3 4 3
37
π π
π
13
π
3
, . 6.43. а) , б) arccos( ). 6.44. а) , б) arcsin( √ ) .
6 3
3
21
3
11
x−1 y+2 z−3
=
=
. 6.46. 9x − 5y + 7z − 4 = 0.
6.45.
−6
−16
−17
6.47. 10x + 8y + 7z − 29 = 0. 6.48. x − 2y + z = 0.
6.49. 6x + 7y + 3z + 5 = 0. 6.50. 2x + y − 2z − 15 = 0. 6.51. (−3, 1, −8).
6.52. (4, −4, 0), (2, 0, 10), (0, 4, 20). 6.53. (2, −3, 1). 6.54. (1, 2, −2).
6.55. (2, 5, −2). 6.56. (7, 1, −2). 6.57. 3. 6.58. 1. 6.59. 6.
√
x+5 y+9 z−4
6.60. 11. 6.61. −x + y + 2z + 7 = 0. 6.62.
=
=
.
−1
−4
1
x = 2 + 3t,
x y−2
y = 3 − 2t,
6.63.
. 6.64. 2x+y −z +1 = 0. 6.65. =
=
3
−2
z = −4 − t, t ∈ R
z
.
=
−1
6.42. 0,
7.
7.1.
ПРОСТРАНСТВА Cn И Rn
Основные понятия
Вектором ~x размерности n будем называть упорядоченный набор x1 ,
x2 , . . ., xn из n комплексных (вещественных)
чисел. Такие векторы будем
x1
записывать в виде матриц-столбцов: ~x = ... , а числа x1 , x2 , . . ., xn будем
xn
называть координатами вектора ~x.
Для таких векторов определим операции сложения и умножения на
число по
правилам:
x1
y1
x1 + y 1
..
;
если ~x = ... , ~y = ... , то ~x + ~y =
.
x + yn
x
yn
n
n
αx1
x1
.
если ~x = .. , α – число, то α~x = ... .
xn
αx
n
0
~
Обозначим нулевой вектор: 0 = ... .
0
Множество всех таких векторов размерности n с введенными операциями сложения и умножения на число будем называть векторным пространством Cn ( Rn ).
38
Пусть ~a1 , ~a2 , . . ., ~am – векторы пространства Cn (Rn ) и α1 , α2 , . . .,
αm – некоторые числа.
Выражение
α1~a1 + α2~a2 + . . . + αm~am
называется линейной комбинацией векторов ~a1 , ~a2 , . . ., ~am с коэффициентами α1 , α2 , . . ., αm .
Составим из векторов ~a1 , ~a2 , . . ., ~am линейную комбинацию и приравняем нулевому вектору:
α1~a1 + α2~a2 + . . . + αm~am = ~0.
Это равенство является уравнением относительно неизвестных α1 , α2 ,
. . ., αm .
Если уравнение имеет единственное нулевое решение
α1 = α2 = . . . = αm = 0,
то множество векторов ~a1 , ~a2 , . . ., ~am называется линейно независимым
или говорят, что векторы ~a1 , ~a2 , . . ., ~am линейно независимы.
Если рассматриваемое уравнение имеет ненулевые решения (хотя бы
одно из чисел α1 , α2 , . . ., αm не равно нулю), то множество векторов ~a1 , ~a2 ,
. . ., ~am называется линейно зависимым (векторы ~a1 , ~a2 , . . ., ~am линейно
зависимы).
Пример 7.1. Показать, что если множество векторов содержит нулевой вектор, то оно линейно зависимо.
Решение. Рассмотрим в Cn (Rn ) множество векторов, содержащее нулевой вектор:
~a1 , ~a2 , . . . , ~am , ~0.
Составим из векторов линейную комбинацию и приравняем нулевому
вектору:
α1~a1 + α2~a2 + . . . + αm~am + αm+1~0 = ~0.
Очевидно, что это равенство будет выполняться, если задать
α1 = α2 = . . . = αm = 0 и αm+1 = 1 (αm+1 можно положить равным
любому отличному от нуля числу). Поскольку один из коэффициентов не
равен нулю, то рассматриваемое множество векторов линейно зависимо.
Пример 7.2. Показать, что 2 ненулевых вектора ~a1 , ~a2 ∈ R3 (R2 )
линейно зависимы тогда и только тогда, когда они коллинеарны.
Решение. Рассмотрим 2 вектора ~a1 , ~a2 ∈ R3 (R2 ). Запишем уравнение
α1~a1 + α2~a2 = ~0.
39
Предположим, векторы линейно зависимы. Значит, хотя бы одно из
чисел α1 , α2 отлично от нуля. Пусть, для определенности, α1 6= 0. Тогда
α
~a1 = − 2 ~a2 ,
α1
α
т. е. векторы ~a1 и ~a2 коллинеарны ( ~a1 = λ~a2 , λ = − 2 ).
α1
Предположим теперь, что векторы ~a1 и ~a2 коллинеарны и ~a1 = λ~a2 .
Тогда выполняется равенство
~a1 − λ~a2 = ~0,
при этом коэффициент α1 = 1 6= 0. Значит, векторы ~a1 и ~a2 линейно
зависимы.
Из этого примера следует, что линейная независимость двух векторов
~a1 , ~a2 ∈ R3 (R2 ) равносильна неколлинеарности векторов ~a1 и ~a2 .
Пример 7.3. Показать, что 3 ненулевых вектора ~a1 , ~a2 , ~a3 ∈ R3
линейно зависимы тогда и только тогда, когда они компланарны.
Решение. Рассмотрим теперь 3 ненулевых вектора ~a1 , ~a2 , ~a3 ∈ R3 .
Запишем уравнение
α1~a1 + α2~a2 + α3~a3 = ~0.
Предположим, векторы линейно зависимы, т. е. хотя бы одно из чисел
α1 , α2 , α3 не равно нулю. Пусть, для определенности, α1 6= 0, тогда
α
α
~a1 = λ~a2 + µ~a3 (λ = − 2 , µ = − 2 ).
α1
α1
Вектор ~a1 представляется как линейная комбинация двух ненулевых
векторов, это означает, что вектор ~a1 лежит в плоскости векторов ~a2 и ~a3 ,
а значит, векторы ~a1 , ~a2 , ~a3 компланарны.
Докажите самостоятельно, что из компланарности трех ненулевых векторов ~a1 , ~a2 , ~a3 следует линейная зависимость этих векторов.
Из рассмотренного примера следует, что линейная независимость трех
векторов равносильна их некомпланарности.
−1
1
1
2
0
6
Пример 7.4. Даны векторы ~a1 =
0, ~a2 = 5 , ~a3 = 10 про1
14
4
странства R4 . Установить, линейно независимо множество векторов или
нет?
Решение. Составим из векторов ~a1 , ~a2 , ~a3 линейную комбинацию и
приравняем нулевому вектору:
α1~a1 + α2~a2 + α3~a3 = ~0.
40
Запишем данное векторное уравнение в координатной форме:
1
−1
1
0
2
0
6 0
α1
0 + α2 5 + α3 10 = 0 .
4
1
14
0
Получаем однородную систему линейных уравнений:
α1 − α2 + α3 = 0,
2α1 + 6α3 = 0,
5α2 + 10α3 = 0,
4α1 + α2 + 14α3 = 0
относительно неизвестных коэффициентов α1 , α2 , α3 .
Решим систему методом Гаусса–Жордана:
α1 α2 α3
I
1 −1 1 0
2
0 6 0 + I · (−2) ⇔
0
5 10 0
4 1 14 0 + I · (−4)
α1 α2 α3
1 −1 1 0
0
2 4 0
:2⇔
0
5 10 0
0 5 10 0
α1 α2 α3
α1 α2 α3
+ II
1 −1 1 0
1 0
3 0
II
⇔
⇔
1 2 0
2 0
0
0 1
⇔
0
5 10 0 + II · (−5)
0 0
0 0
0 5 10 0 + II · (−5)
0 0
0 0
α1 + 3α3 = 0,
⇔
α2 + 2α3 = 0.
Система уравнений имеет бесконечно много ненулевых решений:
α1 = −3t,
α = −2t,
2
α3 = t, t ∈ R, t 6= 0.
Полагая, например, t = 1 получим равенство:
−3~a1 − 2~a2 + ~a3 = ~0,
из которого следует линейная зависимость данных векторов.
Рассмотрим теперь в Cn (Rn ) n векторов ~a1 , ~a2 , . . ., ~an .
Теорема 7.1. (Признак линейной независимости n векторов
в Cn и Rn .) Множество, состоящее из n векторов ~a1 , ~a2 , . . ., ~an пространства Cn (Rn ), линейно независимо тогда и только тогда, когда
41
det A 6= 0, где A = [~a1~a2 . . . ~an ] – матрица, составленная из координат
этих векторов.
Из теоремы следует, что линейная зависимость множества векторов
~a1 , ~a2 , . . ., ~an равносильна тому, что det A = 0.
3
λ
−1
Пример 7.5. Даны векторы ~a1 = 1 , ~a2 = 2 , ~a3 = 1 .
1
1
−3
При каких значениях λ множество векторов ~a1 , ~a2 , ~a3 является линейно независимым?
Решение. Составим из векторов ~a1 , ~a2 , ~a3 матрицу и найдем ее определитель:
3 λ −1
det A = det 1 2 1 = 4λ − 20.
1 1 −3
Из теоремы 7.1 следует, что при выполнении условия det A 6= 0, т. е.
при λ 6= 5, векторы ~a1 , ~a2 , ~a3 линейно независимы.
Рассмотрим теперь в Cn (Rn ) m векторов ~a1 , ~a2 , . . ., ~am .
Теорема 7.2.
зависимы.
Если m > n, то векторы ~a1 , ~a2 , . . ., ~am линейно
Теорема 7.3. Множество ненулевых векторов ~a1 , ~a2 , . . ., ~am ∈ Cn
(Rn ) линейно зависимо тогда и только тогда, когда хотя бы один вектор
множества представим в виде линейной комбинации других векторов
этого множества.
В частности, если m = 2, то данная теорема означает, что существует
такое число λ 6= 0, для которого
~a2 = λ~a1 .
При этом говорят, что вектор ~a2 выражается через вектор ~a1 , а число λ
называют коэффициентом пропорциональности координат этих векторов.
2−i
1 − 3i
2
, ~a2 =
.
Пример 7.6. В C даны векторы ~a1 =
1+i
i
Установить, является ли множество векторов ~a1 , ~a2 линейно независимым (линейно зависимым)? Если векторы линейно зависимы, то выразить
один из этих векторов через другой.
Решение. Составим из векторов ~a1 , ~a2 матрицу A и найдем ее определитель:
42
2 − i 1 − 3i
det A = det
= (2−i)(1+i)−i(1−3i) = 2+2i−i+1−i−3 = 0.
i
1+i
Поскольку det A = 0, то векторы ~a1 , ~a2 линейно зависимы. Значит,
один вектор выражается через другой:
1 − 3i
2−i
~a2 = k~a1 ⇔
=k
.
1+i
i
Тогда 1 + i = ki. Следовательно, k =
равенство: ~a2 = (1 − i)~a1 .
Справедливы следующие теоремы.
1+i
= 1 − i и выполняется
i
Теорема 7.4. Если множество векторов линейно независимо, то
любое его подмножество линейно независимо.
Теорема 7.5. Если множество векторов содержит линейно зависимое подмножество, то оно само является линейно зависимым.
7.2.
Базис в Cn и Rn
Любой упорядоченный набор из n линейно независимых векторов
пространства Cn (Rn ) называется базисом этого векторного пространства.
Из примеров 7.2 и 7.3 следует, что любой набор из двух неколлинеарных векторов ~a1 , ~a2 является базисом в R2 , а любой набор из трех некомпланарных векторов ~a1 , ~a2 , ~a3 образует базис в R3 .
Пусть ~a1 , ~a2 , . . ., ~an – некоторый набор векторов в Cn (Rn ). Из теоремы 7.1 следует, что если векторы удовлетворяют условию
det[~a1~a2 . . . ~an ] 6= 0,
то они образуют базис.
Рассмотрим в Cn ( Rn ) набор векторов
1
0
0
~i1 = 0. , ~i2 = 1. , . . . , ~in = 0. .
..
..
..
0
0
1
Поскольку det[~i1~i2 . . .~in ] = det I = 1 6= 0 (I – единичная матрица), то
эти векторы линейно независимы и образуют базис. Этот базис называется
стандартным базисом в Cn и Rn .
Пусть ~b – произвольный вектор Cn ( Rn ) и ~a1 , ~a2 , . . ., ~an – некоторый
базис в Cn (Rn ).
43
Представление вектора ~b в виде
~b = β1~a1 + β2~a2 + . . . + βn~an
называется разложением вектора ~b по векторам базиса ~a1 , ~a2 , . . ., ~an .
Числа β1 , β2 , . . ., βn называются координатами вектора ~b в базисе ~a1 ,
~a2 , . . ., ~an .
Теорема 7.6. В Cn (Rn ) любой вектор можно разложить по векторам базиса и такое разложение единственно.
Пример 7.7. Даны векторы: ~a1 = ~i + ~j, ~a2 = −~i + 2~j, ~b = −3~i + 3~j.
Доказать, что векторы ~a1 и ~a2 образуют базис в R2 . Разложить вектор
~b по векторам этого базиса.
1
−1
Решение. Векторы ~a1 =
и ~a2 =
не коллинеарны, следова1
2
2
тельно, они линейно независимы
и образуют базис в R .
−3
Представим вектор ~b =
в виде линейной комбинации базисных
3
векторов:
~b = β1~a1 + β2~a2 .
Запишем это уравнение в координатной форме:
−3
1
−1
= β1
+ β2
.
3
1
2
Получим систему линейных уравнений
β1 − β2 = −3,
β1 + 2β2 = 3
относительно неизвестных β1 , β2 .
Решим систему методом Гаусса–Жордана:
β1 β2
β1 β2
I
⇔ 1 −1 −3
⇔
1 −1 −3
1 2 3 + I · (−1)
0 3 6 :3
β1 β2
β1 β2 β1 = −1,
⇔ 1 −1 −3 + II ⇔ 1 0 −1 ⇔
β2 =
2.
II
0 1 2
0 1 2
Заданный вектор раскладывается по векторам базиса ~a1 , ~a2 :
~b = −~a1 + 2~a2 .
Вектор ~b имеет координаты −3, 3 в стандартном базисе ~i, ~j и координаты −1, 2 в базисе ~a1 , ~a2 .
44
7.3.
Скалярное произведение в Cn и в Rn
x1
y1
.
Скалярным произведением (~x, ~y ) векторов ~x = .. , ~y = ... в
xn
yn
n
пространстве C называется число, равное сумме произведений координат первого вектора на числа, сопряженные координатам второго вектора:
(~x, ~y ) = x1 y1 + x2 y2 + . . . + xn yn .
Эту формулу можно записать, используя правило умножения матриц:
(~x, ~y ) = ~y ∗ · ~x.
Свойства скалярного произведения в Cn :
1. (~x, ~x) ≥ 0, (~x, ~x) = 0 ⇔ ~x = ~0.
2. (~x, ~y ) = (~y , ~x).
3. (λ~x, ~y ) = λ(~x, ~y ), (~x, λ~y ) = λ(~x, ~y ).
4. (~x, ~y + ~z) = (~x, ~y ) + (~x, ~z), (~x + ~y , ~z) = (~x, ~z) + (~y , ~z).
1 + 2i
−i
Пример 7.8. Даны векторы: ~a = 2 , ~b = 1 − 2i .
1 − 3i
2i
Найти скалярные произведения (~a, ~b), (~b, ~a), (3i~a, (1 − 2i)~b).
Решение. По определению:
(~a, ~b) = (1 + 2i)i + 2(1 + 2i) + (1 − 3i)(−2i) = i − 2 + 2 + 4i − 2i − 6 = −6 + 3i,
(~b, ~a) = −i(1 − 2i) + (1 − 2i)2 + 2i(1 + 3i) = −i − 2 + 2 − 4i + 2i − 6 = −6 − 3i.
Видим, что (~b, ~a) = (~a, ~b) (выполняется свойство 2).
Для вычисления (3i~a, (1−2i)~b) воспользуемся указанными выше свойствами скалярного произведения:
(3i~a, (1 − 2i)~b) = 3i(1 − 2i)(~a, ~b) = 3i(1 + 2i)(~a, ~b) =
= (3i − 6)(−6 + 3i) = −18i − 9 + 36 − 18i = 27 − 36i.
Особенности скалярного произведения в Rn
Поскольку для любого вещественного числа y справедливо
равенство
x1
y1
.
y = y, то формула скалярного произведения векторов ~x = .. , ~y = ...
xn
yn
n
в R принимает вид
(~x, ~y ) = x1 y1 + x2 y2 + . . . + xn yn .
45
Скалярное произведение векторов в Rn равно сумме произведений соответствующих координат векторов.
Эта формула является обобщением скалярного произведения векторов
3
в R на случай n-мерного пространства.
Кроме того, в Rn свойства скалярного произведения 2 и 3 записываются в виде:
2. (~x, ~y ) = (~y , ~x).
3. (λ~x, ~y ) = λ(~y , ~x), (~x, λ~y ) = λ(~y , ~x).
Свойства 1 и 4 записываются так же, как в Cn .
7.4.
Норма векторов в Cn и в Rn
Если каждому вектору ~x ∈ Cn (Rn ) поставить в соответствие вещественное число ||~x||, удовлетворяющее условиям:
1) ||~x|| ≥ 0, ||~x|| = 0 ⇔ ~x = ~0,
2) ||λ~x|| = |λ| · ||~x|| (λ – число),
3) ||~x + ~y || ≤ ||~x|| + ||~y ||,
то число ||~x|| называют нормой вектора ~x, а условия 1), 2), 3) – аксиомами
нормы.
Норму вектора можно вводить по-разному.
Норму, определяемую по правилу
q
||~x|| = (~x, ~x),
называют нормой, порожденной скалярным произведением, или евклидовой нормой.
x1
Если ~x = ... – вектор пространства Cn , то
xn
q
p
||~x|| = (~x, ~x) = x1 x1 + x2 x2 + . . . + xn xn =
q
= |x1 |2 + |x2 |2 + . . . + |xn |2 .
x1
Для вектора ~x = ... пространства Rn :
x
q
qn
||~x|| = (~x, ~x) = x1 2 + x2 2 + . . . + xn 2 .
Для любых векторов ~x, ~y ∈ Cn (Rn ) справедливо неравенство
|(~x, ~y )| ≤ k~xk · k~y k,
46
называемое неравенством Коши–Буняковского–Шварца.
Пусть ~x – произвольный ненулевой вектор в Cn (Rn ). Если этот вектор разделить на его норму (нормировать), то получится вектор, норма
которого равна единице:
~x
= ~x0 (||~x0 || = 1).
||~x||
7.5.
Ортогональный базис в Cn (Rn )
Два вектора ~x, ~y ∈ Cn (Rn ) называются ортогональными, если скалярное произведение этих векторов равно нулю:
(~x, ~y ) = 0.
Теорема 7.7. Множество из ненулевых попарно ортогональных
векторов линейно независимо.
Из теоремы следует, что упорядоченный набор ~a1 , ~a2 , . . ., ~an из n попарно ортогональных векторов ((~ai , ~aj ) = 0, i 6= j, i = 1, 2, . . . , n,
j = 1, 2, . . . , n) образует базис в Cn (Rn ), который называется ортогональным.
Ортогональный базис называется ортонормированным, если норма
каждого вектора этого базиса равна единице:
0,
i 6= j;
(~ai , ~aj ) =
1,
i = j, i = 1, 2, . . . , n, j = 1, 2, . . . , n.
Теорема 7.8. Пусть ~a1 , ~a2 , . . ., ~an – ортогональный базис в пространстве Cn (Rn ), ~b – произвольный вектор в Cn (Rn ), тогда в разложении вектора ~b по векторам базиса:
~b = β1~a1 + β2~a2 + . . . + βn~an
координаты этого вектора находятся по формулам
βi =
(~b, ~ai )
,
||~ai ||2
i = 1, 2, . . . , n
и называются коэффициентами Фурье.
Если базис ~a1 , ~a2 , . . ., ~an ортонормированный, то ||~ai ||2 = 1 для всех
векторов ~ai . Для такого базиса координаты βi определяются по правилу
βi = (~b, ~ai ),
i = 1, 2, . . . , n.
47
1
1
Пример 7.9. Доказать, что векторы ~a1 = 2, ~a2 = −1 ,
1
1
−3
~a3 = 0 образуют ортогональный базис в пространстве R3 . Разложить
3
2
~
вектор b = 4 по этому базису.
−6
Решение. Вычислим скалярные произведения векторов ~a1 , ~a2 , ~a3 :
(~a1 , ~a2 ) = 1 · 1 + 2 · (−1) + 1 · 1 = 0,
(~a1 , ~a3 ) = 1 · (−3) + 2 · 0 + 1 · 3 = 0,
(~a2 , ~a3 ) = 1 · (−3) + (−1) · 0 + 1 · 3 = 0.
Следовательно, ненулевые векторы ~a1 , ~a2 , ~a3 попарно ортогональны и
образуют ортогональный базис в R3 .
Разложим вектор ~b по этому базису:
~b = β1~a1 + β2~a2 + β3~a3 .
Находим коэффициенты Фурье:
β1 =
(~b, ~a1 ) 2 · 1 + 4 · 2 + (−6) · 1 4 2
=
= = ,
6
6 3
||~a1 ||2
8
(~b, ~a2 ) 2 · 1 + 4 · (−1) + (−6) · 1
=
=
−
,
β2 =
3
3
||~a2 ||2
(~b, ~a3 ) 2 · (−3) + 4 · 0 + (−6) · 3
24
4
β3 =
=
=
−
=
−
.
18
18
3
||~a3 ||2
В итоге получим:
~b = 2~a1 − 8~a2 − 4~a3 .
3
3
3
7.6.
Упражнения
7.1. Векторы ~a и ~b линейно зависимы. Может ли множество векторов ~a,
~b, ~c быть линейно независимым? Ответ обоснуйте.
7.2. Векторы ~a и ~b линейно независимы. Может ли множество векторов ~a,
2~a − 5~b, ~b быть линейно независимым? Ответ обоснуйте.
7.3. Векторы ~a и ~b линейно зависимы. Может ли множество векторов ~a,
~a + ~b, ~b быть линейно независимым? Ответ обоснуйте.
48
7.4. Векторы ~a, ~b, ~c линейно независимы. Может ли множество векторов
3~a, −2~b, 4~c быть линейно зависимым? Ответ обоснуйте.
7.5. Векторы ~a, ~b, ~c линейно независимы. Может ли множество векторов
−~a и 2~b быть линейно зависимым? Ответ обоснуйте.
7.6. Векторы ~a, ~b, ~c линейно независимы. Может ли множество векторов
2~a, −~b, 3~c быть линейно зависимым? Ответ обоснуйте.
7.7. Векторы ~a и ~b линейно независимы. Может ли множество векторов ~a,
~0, ~b быть линейно независимым? Ответ обоснуйте.
7.8. Векторы ~a и ~b линейно независимы. Может ли множество векторов ~a,
~a + 2~b быть линейно зависимым? Ответ обоснуйте.
7.9. Векторы ~a1 , ~a2 , ~a3 линейно независимы. Будет ли линейно независимо
множество векторов: а) ~b1 = 2~a1 − ~a2 + ~a3 , ~b2 = ~a2 − 2~a3 , ~b3 = −~a1 + 3~a3 ;
б) ~b1 = ~a1 + ~a2 + ~a3 , ~b2 = ~a1 − 2~a3 , ~b3 = 2~a1 + ~a2 − ~a3 ?
7.10. Векторы ~a1 , ~a2 , ~a3 линейно независимы. Найти линейную зависимость между векторами ~b1 = ~a1 + ~a2 , ~b2 = ~a2 − ~a3 , ~b3 = ~a1 − ~a2 + ~a3 ,
~b4 = ~a2 + ~a3 .
7.11. Известно, что столбцы матрицы A линейно независимы, A – квадратная матрица. Верно ли, что столбцы матрицы A−1 линейно независимы?
Ответ обоснуйте.
7.12. Известно, что столбцы матрицы A линейно зависимы, A – квадратная
матрица. Верно ли, что столбцы матрицы A2 линейно зависимы? Ответ
обоснуйте.
7.13. Известно, что столбцы матрицы A линейно независимы, A – квадратная матрица. Сколько решений может иметь система линейных уравнений
A~x = ~b (~x – неизвестная матрица-столбец)?
7.14. Известно, что столбцы матрицы A линейно зависимы, A – квадратная матрица. Сколько решений может иметь система линейных уравнений
A~x = ~b (~x – неизвестная матрица-столбец)?
7.15. а) Покажите, что векторы ~i, ~j линейно независимы.
б) Покажите, что любые 2 коллинеарных вектора пространства R2 линейно
зависимы.
в) Покажите, что любые 3 вектора пространства R2 линейно зависимы.
7.16. а) Покажите, что векторы ~i, ~j, ~k линейно независимы.
б) Покажите, что любые 3 компланарных вектора пространства R3 линейно зависимы.
в) Покажите, что любые 4 вектора пространства R3 линейно зависимы.
В упражнениях 7.17–7.28 определите, линейно зависимы или линейно
независимы заданные векторы. В случае линейной зависимости векторов
приведите пример разложения одного вектора из заданного множества по
49
другим векторам.
−2
6
1
5
1
1
−1
3 −9
7.17. 2 , 3 . 7.18. , . 7.19. −2 , 2 , −6.
1
−3
−4
2
0
−1
2
2
−6
0
1
−1
1
0
1
1
7.20. −2 , 2 , −6 . 7.21. −1 , 3 , 2 , −4.
0
0 −1
3
−2
−1
−2
1
−1
1
0
2
0
2 0 6
, , . 7.23. −1 , 0 , 0 .
7.22.
0 5 10
0 0 −1
4
1
14
4 −1
2
1
0
2
1
−1
0
0
1 1 −1
, , . 7.25. −1 , 0 , −1 , 0 .
7.24.
−1 −1 1
0 0 1 1
0 1 0
−1 0 −1
3
1 + 2i
−3 + 4i
2i
2
i
1
7.26.
,
. 7.27.
,
. 7.28.
,
.
i
−2 + i
1 − 2i
2+i
2+i
1 − 2i
0
1
λ
~
7.29. Даны векторы ~a = −1 , b = −2 , ~c = −4 . При каких значе4
−5
3
ниях λ множество векторов
, ~b, ~c является
~a
линейно
независимым?
3
2
0
~
7.30. Даны векторы ~a = −2, b = λ, ~c = 1 . При каких значениях
4
1
−5
λ множество векторов ~a, ~b,~c является
зависимым?
линейно
z
z
7.31. Даны векторы ~x = 1 , ~y = 1 ∈ C2 . При каких значениях z1 и
z2
z2
z2 множество векторов ~x, ~y является линейно
зависимым?
3+λ
4
7.32. При каком значении λ векторы ~x =
и ~y =
не образуют
1
2
базис в R2 ?
1
1
7.33. При каких значениях λ множество векторов ~a1 = 1 , ~a2 = λ,
1
2
1
~a3 = 3 образует базис в пространстве R3 ?
3
7.34. При каком значении λ множество векторов
50
1
λ
3
~a1 = 2 , ~a2 = 3 , ~a3 = 1
3
5
2
является линейно зависимым? При этом λ найдите зависимость между векторами. Подберите такой вектор ~a4 , что множество векторов ~a1 , ~a3 , ~a4 образует базис в R3 .
1 + 3i ~
2−i
7.35. Образуют ли векторы ~a =
,b =
базис в C2 ?
3i
2
7.36. Покажите, что векторы ~a1 , ~a2 образуют базис в R2 . Разложите вектор ~b поэтому
базису:
2
−1 ~
−1
1
3 ~
5
а) a~1 =
, a~2 =
,b=
; б) a~1 =
, a~2 =
,b=
.
1
1
4
−2
1
−3
1
−i
7.37. Покажите, что векторы a~1 =
, a~2 =
образуют базис в C2 .
i
−1
2
−
i
Разложите вектор ~b =
по этому базису.
−3 + 2i
7.38. Покажите, что векторы ~a1 , ~a2 , ~a3 образуют базис в R3 . Разложите
вектор ~b поэтому базису:
3
0
0
6
1
1
~
а) a~1 = 0 , a~2 = −2 , a~3 = 0 , b = −4 ; б) a~1 = 0 , a~2 = 1,
3
0
0
3
0 0
1
−2
1
1
−1
2
a~3 = 1, ~b = 0 ; в) a~1 = 2 , a~2 = 2, a~3 = 2 , ~b = −4.
−1
0
1
−1
−1
0
−2
2
2
−1
7.39. Даны векторы 0 , 1 , 2 , 0 . Из этого множества вы−3
0
−3
0
3
берите векторы,
которые образуют базис в пространстве R . Разложите
1
~
вектор b = −4 по этому базису.
9
7.40. Покажите, что векторы ~a1 , ~a2 , ~a3 образуют базис в C3 . Разложите
~
вектор
базису:
bпо этому
0
1 − 4i
i
0
a~1 = 0, a~2 = i , a~3 = 0, ~b = −2 + 2i.
i
−1
0
0
7.41. Покажите, что векторы ~a1 , ~a2 , ~a3 , ~a4 образуют базис в R4 . Разложите
вектор ~b по этому базису:
51
1
0
=
−1,
0
1
2
=
−1,
2
0
1
0
4
1
0
1
6
~
а) a~1
a~2 =
0 , a~3 = 0, a~4 = 0, b = −1;
−1
1
1
5
1
0
−1
2
−1
3
1
1
~
б) a~1
a~2 =
0 , a~3 = 1, a~4 = 0 , b = 3.
1 0 1
1
−3
−4
−1
−2
~ ~
~
~
7.42. Даны векторы ~a =
3 , b = 5 . Найдите (~a, b), (b, ~a), ||~a||, ||b||,
4
−5
(4~a, −5~b), (−5~a, 4~b), (3~a − 2~b, ~b).
7.43. Для заданных векторов ~a, ~b найдите скалярные произведения (~a, ~b),
(~b, ~a) и нормы ||~a||, ||~b||:
1
i
−1 + 2i ~
4i
а) ~a =
,b=
; б) ~a = 2, ~b = −i .
2i
1−i
i
3+i
−2 ~
−1 + 2i
7.44. Даны векторы ~a =
,b=
.
2−i
3i
~ a + 4i~b).
Найдите ((1 − 2i)~a, (1− 2i)~b), (2i~a, 2i~
a), (b, 2~
−2 + i
−1 − i
7.45. Даны векторы ~a = −i , ~b = −2 .
3
3i
~
~
Найдите (~a, ~b), ((−5 −3i)~a, ~b), (~a,(−5 − 3i)
b), (−2~a + 3b, ~a).
−3
−1 − i
−2
−2
~
7.46. Даны векторы ~a =
5 , b = 3i . Найдите нормы этих век1
−2 + i
торов.
i
−2 + i
7.47. Даны векторы ~a = −3 − i, ~b = 1 + i . Найдите (~a, ~b) и норми−2 + i
i
руйте эти векторы.
7.48. k~ak = 2. Найдите скалярные произведения (~a, −i~a), (−i~a, ~a), (−i~a, −i~a),
((1 + i)~a, (1 + i)~a).
7.49. (~a, ~b) = −2i, (~a + ~b, ~b) = 9 − 2i. Найдите k~bk.
7.50. ~a, ~b ∈ Rn , k~ak = 2, k~bk = 3. Найдите скалярное произведение
(2~a + ~b, 2~a − ~b).
7.51. k~ak = 2, (~a, ~b) = −2−2i. Найдите скалярное произведение (2~a +~b, i~a).
52
7.52. k~ak = 2, (~a, ~b) = i. Найдите скалярное произведение (~a + ~b, ~a).
7.53. k~ak = k~bk = 3, (~a, ~b) = 2 + i. Найдите скалярные произведения
(~a + ~b, ~a + ~b), (~a + ~b, ~a − ~b).
7.54. k~ak = 2, ~b = α~a. При каком значении α скалярное произведение
(~a, ~b) = 16i?
7.55. k~ak = 2. Найдите скалярное произведение ((−3 + i)~a, (−3 + i)~a).
7.56. (~a, ~b) = 3 + i, (2~a, ~a − i~b) = 6 + 6i. Найдите k~ak.
7.57. k~ak = 4, k~bk = 3. Возможно ли равенство (~a, ~b) = 10i?
7.58. k~ak = 4, k~bk = 3. Возможно ли равенство (~a, ~b) = −12?
7.59. k~ak = 4, k~bk = 3. Возможно ли равенство (~a, ~b) = 14?
7.60. ~a ∈ C6 . Возможно ли равенство (~a, 6~a) = 24 + 24i? Если возможно,
то чему равна k~ak?
7.61. Проверьте,
ортогональны
или нет векторы ~a, ~b:
−2
−1
−1
+
2i
2i
1
+
3i
а) ~a = 3 , ~b = 2 ; б) ~a =
, ~b =
; в) ~a =
,
2
−2 + i
1−i
4
−2
2i
3
~b = 2i ; г) ~a = −4i , ~b = i .
3−i
3 + 2i
2i
7.62. Установите,
каком значении α заданные векторы
при
ортогональны:
−3
4
α
2
6i
i
~
~
~
а) ~a = 2 , b = 1 ; б) ~a =
,b=
; в) ~a = −4i, b = 3 .
αi
2i
α
−5
5
2i
−1 − i
7.63. Найдите значения α и β, при которых вектор ~a = α + iβ ортого−3i
2+i
~
нален вектору b = −i .
2
1
−3
2
α
1
−1
~
7.64. Даны векторы ~a =
0 , b = −2, ~c = 2 . Найдите значения α
1
4
β
и β, при которых вектор ~c
ортогонален
~a
и ~b.
векторам
−1 + 2i
−i
~
7.65. Даны векторы ~a = −3 + i , b = −1 + i . Проверьте, ортого−1 + 2i
−i
нальны или нет эти векторы, и нормируйте их.
53
1
2
4
−1
~
7.66. Даны векторы a~1 = 1, a~2 = 1 , a~3 = −5, b = 2 . Дока1
−3
1
−2
жите, что векторы a~1 , a~2 , a~3 образуют ортогональный базис в R3 , найдите
~b по этому базису.
коэффициенты Фурье и разложите
вектор
3
−1
2
−5
~
~
7.67. Даны векторы ~a = −3 , b = 0 , ~c = 4 , d = 2 . Дока3
1
2
−3
жите, что векторы ~a, ~b, ~c образуют ортогональный базис в R3 . Постройте
ортонормированный базис, найдите коэффициенты Фурье вектора d~ и разложите вектор d~ по этому
базису.
1
1
1
−1
7.68. Даны векторы 1 , 1 , 0 , 1 . Из этого множества выбе−1
2
−2
0
3
рите векторы, которые образуют ортогональный
базис в пространстве R .
6
~
Найдите коэффициенты Фурье вектора b = 8 и разложите вектор ~b по
−9
этому базису.
1
1
7.69. Проверьте ортогональность векторов a~1 = 2 , a~2 = 1 , дополни3
−1
те систему до ортогонального базиса в R3 , постройте ортонормированный
3
3
~
базис в R . Найдите коэффициенты Фурье вектора b = −2 и разложите
1
вектор ~b по этому базису.
7.70.Даны
векторы
1
0
−2
1
2
−2
, a~2 = 1 , a~3 = 2, a~4 = 0 , ~b = 0 .
a~1 =
−1
−1
1
−3
1
2
1
1
1
3
Докажите, что векторы a~1 , a~2 , a~3 , a~4 образуют ортогональный базис в R4 .
Найдите коэффициенты Фурье вектора ~b и разложите вектор ~b по этому
базису.
−2
1
3
1
7.71. Проверьте ортогональность векторов a~1 =
1 , a~2 = 2 и до1
−3
полните систему до ортогонального базиса в R4 .
54
7.72. Используя ортогональный базис, полученный в упражнении 7.71, постройте
базис. Найдите коэффициенты Фурье вектора
ортонормированный
−5
3
~b = и разложите вектор ~b по этому базису.
−1
−3
i
1
i
−i
~
7.73. Даны векторы a~1 = 1 , a~2 = i , a~3 = −1 , b = i . Дока0
−2
i
1
3
жите, что векторы a~1 , a~2 , a~3 образуют ортогональный базис в C . Найдите
коэффициенты Фурье вектора ~b и разложите вектор ~b по этому базису.
7.7.
Ответы
7.1. Нет. 7.2. Нет. 7.3. Нет. 7.4. Нет. 7.5. Нет. 7.6. Нет. 7.7. Нет.
7.8. Нет. 7.9. а) Да; б) нет. 7.10. −2~b1 + 3~b2 + 2~b3 + ~b4 = ~0. 7.11. Верно.
7.12. Верно. 7.13. Одно. 7.14. Бесконечно много или ни одного.
7.17. Линейно независимы. 7.18. ~a2 = −3~a1 . 7.19. ~a1 = 2~a2 + ~a3 .
7.20. Линейно независимы. 7.21. ~a3 = 2~a2 + ~a4 . 7.22. ~a3 = 3~a1 + 2~a2 .
7.23. Линейно независимы. 7.24. ~a3 = 2~a1 − 3~a2 . 7.25. ~a1 = −~a2 +~a3 −~a4 .
7.26. ~a2 = (1 + 2i)~a1 . 7.27. Линейно независимы. 7.28. ~a2 = −i~a1 .
7.29. λ 6= 1. 7.30. λ = −1. 7.31. z2 = λz1 , λ ∈ R. 7.32. λ = −1.
7.33. λ 6= 2. 7.34. λ = 4, ~a3 = ~a2 − ~a1 , ~a4 = [0, 0, 1]T . 7.35. Да.
7.36. а) ~b = ~a1 + 3~a2 ; б) ~b = 2~a1 + ~a2 . 7.37. ~b = (2 + i)~a1 + 2~a2 .
7.38. а) ~b = 2~a1 + 2~a2 + ~a3 ; б) ~b = −2~a1 + ~a2 − ~a3 ; в) ~b = 2~a1 − 2~a2 − 2~a3 .
7.39. ~b = −3~a1 − 4~a2 − 3~a4 . 7.40. ~b = (−4 − i)~a1 + (2 + 2i)~a2 + i~a3 . √
7.41. а) ~b = ~a1 + 2~a2 + 3~a3 + 4~a4 ; б) ~b = −~a1 + 3~a2 +√
2~a3 . 7.42. 9, 9, 35,
√
−180, −180, −113. 7.43. а) 6 + 6i, 6 − 6i, 3, 3 2; б) 1 + 4i, 1 − 4i,
√70, √
6, 2 3. 7.44. −5 − 10i,
25 + 53i,
√ 36, −2 − 52i.
√ 7.45. 1 − 10i, −35 + 47i,
1
−27 + 30i. 7.46. ||~a|| = 39, ||~b|| = 2 5. 7.47. −2 + 6i, ~a0 = √ ~a, ~b0 = 12~b.
2 5
7.48. 4i, −4i, 4, 8. 7.49. 3. 7.50. 7. 7.51. 2 − 6i. 7.52. 4 − i. 7.53. 22, −2i.
7.54. α = −4i. 7.55. 40. 7.56. 2. 7.57. Да. 7.58. Да. 7.59. Нет. 7.60. Нет.
7.61. а) Да; б) да; в) нет; г) да. 7.62. а) α = −2; б) α = −3; в) α = 11i.
1 ~
7.63. α = 7, β = −3. 7.64. α = −2, β = 1. 7.65. Да, ~a0 = √
a, ~b0 = 12~b.
2 5
1
3
8
10
2
4
7.66. ~b = − ~a1 + ~a2 − ~a3 . 7.67. ~b = − √ ~a1 + √ ~a2 − √ ~a3 .
3
7
21
3
2
6
23
2
1
4
7.68. ~b = ~a1 − ~a2 + ~a4 . 7.69. ~a3 = [5, −4, 1]T , ~b = ~a1 + ~a3 .
3
3
7
7
2
7
1
1
T
7.70. ~b = ~a1 + ~a2 + ~a3 + ~a4 . 7.71. ~a3 = [−1, −1, 1, 0] , ~a4 = [1, 0, 1, 1]T .
5
15
6
6
55
√
5
1
9
15~a1 + √ ~a2 + + √ ~a3 − √ ~a4 .
15
3
3
−1
+
i
−1
−
i
−1
−
2i
7.73. ~b =
~a1 +
~a2 +
~a3 .
2
6
3
7.72. ~b =
8.
СОБСТВЕННЫЕ ЧИСЛА И СОБСТВЕННЫЕ ВЕКТОРЫ
МАТРИЦЫ
Подробно теоретический материал этого раздела изложен в учебном
пособии [3].
8.1.
Основные понятия
Пусть A – квадратная матрица. Если для некоторого ненулевого век~ существует такое число λ, что выполняется равенство
тора X
~ = λX
~
AX
~ 6= ~0),
(X
~ –
то число λ называется собственным числом матрицы A, а вектор X
собственным вектором матрицы A, соответствующим этому собственному числу.
Собственные числа матрицы являются корнями так называемого характеристического уравнения матрицы:
det(A − λI) = 0.
Для матрицы A n-го порядка определитель det(A − λI) является многочленом степени n относительно λ и называется характеристическим
многочленом матрицы A.
Любая квадратная матрица порядка n имеет ровно n собственных чисел, среди которых могут быть равные (кратные).
Пусть λi является одним из собственных чисел λ1 , . . ., λn матрицы A.
~ i , соответствующих этому собДля определения собственных векторов X
ственному числу, следует решить уравнение
~ i = ~0,
(A − λi I)X
являющееся однородной системой линейных уравнений относительно коор~ i . Поскольку det(A−λI) = 0, эта система имеет бесконечно
динат вектора X
~ i 6= ~0 является собственным вектором
много решений. Каждое решение X
матрицы A, соответствующим собственному числу λi .
Пример
1
рицы A =
3
8.1.
Найти собственные числа и собственные векторы мат2
.
6
56
Решение. Найдем сначала собственные числа матрицы. Для этого
решим характеристическое уравнение det(A − λI) = 0:
1−λ
2
det
= 0 ⇔ (1 − λ)(6 − λ) − 6 = 0 ⇔
3
6−λ
⇔ λ2 − 7λ = 0 ⇔ λ(7 − λ) = 0.
Корни уравнения λ1 = 0, λ2 = 7 – искомые собственные числа матрицы A.
Найдем теперь соответствующие им собственные векторы.
~ 1 = ~0, являющееся
Рассмотрим λ1 = 0. Решим уравнение (A − λ1 I)X
однородной
линейных уравнений относительно координат векто системой
~ 1 = x1 . Применим метод Гаусса–Жордана:
ра X
x2
1−0
2 0
1 2 0
1 2 0
⇔
⇔
⇔
0 0 0
3
6−0 0
3 6 0
x1 = −2α
, α 6= 0.
⇔ x1 + 2x2 = 0 ⇔
x2 = α
−2
α
~1 =
В итоге получаем множество всех собственных векторов X
,
α
α 6= 0, соответствующих собственному числу λ1 = 0.
~ 2 = ~0, равноРассмотрим теперь λ2 = 7. Решим уравнение (A − λ2 I)X
сильное однородной
системе линейных уравнений относительно координат
~ 2 = x1 :
вектора X
x2
1−7
2 0
−6 2 0
1 − 31 0
⇔
⇔
⇔
3
6−7 0
3 −1 0
0 0 0
1
x1 = β
, β 6= 0.
⇔ x1 − x2 = 0 ⇔
x2 = 3β
3
~ 2 = β , β 6= 0 является собственным вектором,
Любой вектор вида X
3β
соответствующим собственному числу λ2 = 7.
Некоторые свойства собственных чисел и собственных
векторов матрицы
Пусть A – квадратная матрица порядка n.
1. Если A – верхняя или нижняя треугольная матрица (в частности, диагональная), то ее диагональные элементы являются ее собственными числами.
57
2. Собственные числа матриц A и AT совпадают.
3. Если λ – собственное число матрицы A, то λ является собственным числом матрицы A∗ .
4. Для любой невырожденной квадратной матрицы T порядка n
матрицы A и T AT −1 имеют одинаковые наборы λ1 , . . ., λn собственных
чисел. Матрицы A и T AT −1 называются подобными.
~ является собственным вектором матрицы A, соот5. Пусть X
ветствующим собственному числу λ. Тогда:
~ является собственным вектором матрицы Am (m = 2, 3, ...),
a) X
соответствующим собственному числу λm ;
~ является собб) если A – невырожденная матрица, то вектор X
ственным вектором матрицы A−1 , соответствующим собственному чис1
лу .
λ
6. Произведение собственных чисел матрицы равно ее определителю:
λ1 · λ2 · . . . · λn = det A.
7. Сумма собственных чисел матрицы равна сумме ее диагональных
элементов:
λ1 + λ2 + . . . + λn = a11 + a22 + . . . + ann .
Сумма диагональных элементов матрицы называется следом матрицы
и обозначается tr A.
1 −5
Пример 8.2. Дана матрица A =
. Найти собственные числа
5 1
матриц A, A2 , A−1 .
Решение. Найдем сначала собственные числа матрицы A. Для этого
решим характеристическое уравнение det(A − λI) = 0:
1 − λ −5
det
= 0 ⇔ (1 − λ)2 + 25 = 0 ⇔ λ2 − 2λ + 26 = 0.
5
1−λ
Это уравнение имеет комплексные корни λ1 = 1 + 5i, λ2 = 1 − 5i,
являющиеся собственными числами матрицы A. Вещественная матрица
может иметь комплексные собственные числа.
Воспользуемся свойством 5 и определим теперь собственные числа
матриц A2 , A−1 :
а) для матрицы A2 :
λ1 = (1 + 5i)2 = −24 + 10i, λ2 = (1 − 5i)2 = −24 − 10i;
б) для матрицы A−1 :
1
1
5i
1
1
5i
λ1 =
=
− , λ2 =
=
+ .
1 + 5i 26 26
1 − 5i 26 26
58
Заметим, что все рассмотренные в этом примере матрицы являются
вещественными, при этом они имеют комплексные собственные числа.
Собственный базис матрицы
Базис в пространстве Cn (Rn ), составленный из собственных векторов
матрицы A порядка n, называется собственным базисом этой матрицы.
Теорема 8.1. Множество собственных векторов матрицы A, соответствующих различным собственным числам, линейно независимо.
Из теоремы следует, что если все собственные числа матрицы A различны, то множество собственных векторов, взятых по одному для каждого
собственного числа, образует базис в пространстве Cn . Этот базис является
собственным базисом матрицы A.
Если среди собственных чисел матрицы A есть равные, то для нее не
всегда удается выделить собственный базис.
8.2.
Самосопряженные матрицы
Пусть A является самосопряженной матрицей (A = A∗ ).
Заметим, что если A – вещественная матрица, то для нее понятия
самосопряженная и симметричная совпадают (A = A∗ ⇔ A = AT ).
Теорема 8.2. Если A – самосопряженная матрица, то
а) все ее собственные числа вещественные;
б) собственные векторы, соответствующие различным собственным числам, ортогональны.
1 −5i
Пример 8.3. Дана самосопряженная матрица A =
. Найти
5i 1
ее собственные числа и собственные векторы.
Решение. Решим характеристическое уравнение det(A − λI) = 0:
1 − λ −5i
det
= 0 ⇔ (1 − λ)2 − 25 = 0 ⇔ λ2 − 2λ − 24 = 0.
5i 1 − λ
Собственные числа матрицы A (корни этого уравнения) – вещественные числа: λ1 = −4, λ2 = 6.
Определим теперь собственные векторы этой матрицы.
1) λ1 = 1 + 5i. Методом
Гаусса–Жордана решим уравнение
~ 1 = ~0 (X
~ 1 = x1 ) :
(A − λ1 I)X
x2
1 −i 0
1 − (1 + 5i)
−5
0
−5i −5 0
⇔
⇔
⇔
5
1 − (1 + 5i) 0
5 −5i 0
0 0 0
59
x1 = iα
⇔ x1 − ix2 = 0 ⇔
, α 6= 0.
x2 = α
i
α
i
~1 =
Получим X
=α
, α 6= 0 – собственные векторы, соответствуюα
1
щие собственному числу λ1 = 1 + 5i.
~ 2 = ~0 (X
~ 2 = x1 ) :
2) λ1 = 1 − 5i. Решим уравнение (A − λ2 I)X
x2
1 − (1 − 5i)
−5
0
5i −5 0
1 i 0
⇔
⇔
⇔
5
1 − (1 − 5i) 0
5 5i 0
0 0 0
x1 = −iβ
⇔ x1 + ix2 = 0 ⇔
, β 6= 0.
x2 = β
−i
β
−i
~2 =
Каждый вектор вида X
=β
, β 6= 0 является собственным
β
1
вектором, соответствующим собственному числу λ2 = 1 − 5i.
Убедимся в ортогональности найденных собственных векторов матрицы A:
~ 1, X
~ 2 ) = (α i , β −i ) = αβ(i · i + 1 · 1) = 0.
(X
1
1
Приведение самосопряженной матрицы к диагональному виду
Теорема 8.3. Для любой самосопряженной матрицы существует собственный ортонормированный базис (даже если среди собственных
чисел матрицы есть одинаковые).
Рассмотрим самосопряженную матрицу A порядка n. Пусть λ1 , . . .,
λn – собственные числа этой матрицы. Выберем ортонормированные собственные векторы ~u1 , . . ., ~un , по одному для каждого собственного числа:
A~ui = λi~ui ,
||~ui || = 1,
i = 1, . . . , n,
(~ui , ~uj ) = 0 i 6= j.
Составим из векторов ~u1 , . . ., ~un матрицу:
U = [~u1~u2 . . . ~un ].
Матрица, столбцы которой являются ортонормированными векторами
пространства Cn , называется унитарной, а вещественная матрица, столбцы которой являются ортонормированными векторами пространства Rn ,
называется ортогональной.
60
Если матрица U – унитарная, то ее обратная матрица U −1 также является унитарной и совпадает с сопряженной матрицей U ∗ :
U −1 = U ∗ .
В вещественном случае матрица U −1 является ортогональной и равна транспонированной матрице U T :
U −1 = U T .
Докажите это свойство самостоятельно.
Теорема 8.4. Любая самосопряженная (вещественная симметричная) матрица A представима в виде произведения трех матриц:
A = U ΛU ∗ (A = U ΛU T ),
(8.1)
U ∗ AU = Λ (U T AU = Λ).
(8.2)
при этом
Здесь
λ1 0 . . . 0
0 λ2 . . . 0
Λ = diag[λ1 , λ2 , . . . , λn ] =
...
0 0 . . . λn
– диагональная матрица, составленная из собственных чисел матрицы
A, а U = [~u1~u2 . . . ~un ] – унитарная (ортогональная) матрица, составленная из ортонормированных собственных векторов этой матрицы, соответствующих собственным числам λ1 , . . ., λn .
Представление матрицы A в виде (8.1) называется каноническим разложением матрицы A, а равенство (8.2) называется приведением этой
матрицы к диагональному виду.
0 1 1
Пример 8.4. Найти собственный базис матрицы A = 1 3 −2
1 −2 3
и привести матрицу к диагональному виду.
Решение. Заданная матрица A является вещественной симметричной
матрицей. Поэтому все ее собственные числа вещественные, а собственные
векторы, соответствующие различным собственным числам, ортогональны. Матрица A имеет собственный ортонормированный базис. Для нее
существует каноническое разложение, и эту матрицу можно привести к
диагональному виду.
61
Найдем сначала собственные числа матрицы. Решим характеристическое уравнение
0−λ
1
1
3 − λ −2 = 0 ⇔ −λ3 + 6λ2 − 3λ − 10 = 0.
det 1
1
−2 3 − λ
Корни характеристического многочлена λ1 = −1, λ2 = 2, λ3 = 5 –
искомые собственные числа матрицы A.
Найдем соответствующие им собственные векторы.
Рассмотрим λ1 = −1. Для определения собственных векторов решим
~ 1 = ~0, равносильное однородной системе линейных
уравнение (A − λ1 I)X
x1
~
уравнений относительно координат вектора X1 = x2 :
x3
x1 x2 x3
1 1 1
1
4 −2
1 −2 4
x1 x2 x3
I
0
1 1 1
⇔
0
0 + I · (−1)
3 −3
0 + I · (−1)
0 −3 3
x1 x2 x3
1 1 1
⇔
0 1 −1
0 −3 3
0
⇔
0 : 3
0
x1 x2 x3
0 +II · (−1)
1 0 2
0
⇔
⇔
II
0
0 1 −1
0
0 + II · (3)
0 0 0
0
x1 = −2α
x1 + 2x3 = 0,
x = α , α 6= 0.
⇔
⇔
x2 − x3 = 0
2
x3 = α
−2α
−2
~
α
В итоге получим X1 =
= α 1 , α 6= 0 собственные векторы,
α
1
соответствующие собственному числу λ1 = −1.
Аналогично находятся собственные векторы, соответствующие собственным числам λ2 = 2 и λ3 = 5. Получите их самостоятельно.
1
~
Собственному числу λ2 = 2 соответствуют векторы X2 = β 1,
1
0
~
β 6= 0, а собственному числу λ2 = 5 – векторы X3 = γ −1, γ 6= 0.
1
62
Правильность нахождения собственных векторов подтверждается их
ортогональностью:
−2
1
~ 1, X
~ 2 ) = (α 1 , β 1) = αβ(−2 + 1 + 1) = 0,
(X
1
1
−2
0
~
~
(X1 , X3 ) = (α 1 , γ −1) = αγ(0 − 1 + 1) = 0,
1
1
1
0
~
~
(X2 , X3 ) = (β 1 , γ −1) = βγ(0 − 1 + 1) = 0.
1
1
~ 1, X
~ 2, X
~ 3 ортогональны.
Для любых чисел α, β, γ векторы X
Выберем для каждого собственного числа по одному нормированному
собственному вектору:
−2
1
1
1 0
1
1 , ~u2 = √ 1 , ~u3 = √ −1 .
~u1 = √
6 1
3 1
2 1
Составим из этих векторов матрицу
−2 1
√ √
0
6
3
1
−1
√ √1 √
U = [~u1~u2~u3 ] =
.
6
3
2
1
1
1
√ √ √
6
3
2
Полученная матрица является ортогональной. Ее столбцы – ортонормированные векторы. Для нее U −1 = U T .
Обозначим Λ следующую диагональную матрицу:
λ1 0 0
−1 0 0
Λ = 0 λ2 0 = 0 2 0 .
0 0 λ3
0 0 5
Заданная матрица A приводится к диагональному виду:
U T AU = Λ.
Убедитесь самостоятельно, что для найденных матриц справедливо
это равенство.
63
8.3.
Упражнения
1
1 2
8.1. Вектор
является собственным вектором матрицы A =
. Ка1
0 3
кому собственному числу матрицы A он соответствует?
2 0
8.2. Какому собственному числу матрицы A =
соответствует ее
−1 1
~ = 3 ?
собственный вектор X
−3
0
~
8.3. Вектор X = 2 является собственным вектором матрицы
2
2 0 0
A = 0 −4 0 . Какому собственному числу этой матрицы он соответ0 0 −4
ствует?
~ — общий собственный вектор матриц A и B. Будет ли он
8.4. Вектор X
собственным вектором матрицы A · B?.
~ = 3X.
~ Какому собственному числу матрицы
8.5. Известно, что (A − 2I)X
~
A соответствует ее собственный вектор X?
~ = 7X.
~ Какому собственному числу матрицы
8.6. Известно, что (2A + I)X
~
A соответствует ее собственный вектор X?
~ — собственный вектор матрицы A, соответствующий
8.7. Известно, что X
~
собственному числу λ = −4. Чему равен вектор (A + I)X?
~ — собственный вектор матрицы A, соответствующий
8.8. Известно, что X
~ Какому собственнособственному числу λ = −3. Чему равен вектор A2 X?
~
му числу матрицы A2 соответствует вектор X?
~ — собственный вектор матрицы A, соответствующий
8.9. Известно, что X
~ Какому собственнособственному числу λ = −2. Чему равен вектор A5 X?
~
му числу матрицы A5 соответствует вектор X?
~ — собственный вектор матрицы A, соответствую8.10. Известно, что X
щий собственному числу λ = 5. Матрица A невырожденная. Чему равен
~ Какому собственному числу матрицы A−1 соответствует
вектор A−1 X?
~
вектор X?
2
2
2
~ =
– собственный вектор матрицы A =
.
8.11. Известно, что X
3
3 3
~
Какому собственному числу
A3 соответствует вектор X?
матрицы
1
3
1
~ =
8.12. Известно, что X
– собственный вектор матрицы A =
.
1
1 3
~
Какому собственному числу матрицы A−1 соответствует вектор X?
64
8.13. Известно, что A – квадратная матрица 3-го порядка. Ее собственные
числа: λ1 = −3, λ2 = 4, λ3 = 2. Чему равен определитель матрицы A?
8.14. Известно, что A – квадратная матрица 4-го порядка. Ее собственные
числа: λ1 = −2, λ2 = −2, λ3 = 5, λ4 = 5. Существует ли для матрицы A
обратная матрица? Ответ обоснуйте.
8.15. Известно, что A – квадратная матрица 3-го порядка. Ее собственные
числа: λ1 = 2, λ2 = 1, λ3 = 0. Существует ли для матрицы A обратная
матрица? Ответ обоснуйте.
2 1
8.16. Дана матрица A =
. Найдите собственные числа следующих
1 2
матриц: A, A3 , A−1 AT − 5I,
2A + I.
2 1
8.17. Дана матрица A =
. Найдите собственные числа следующих
6 3
матриц: A, A2 , A−1 .
−1 2
8.18. Дана матрица A =
. Найдите собственные числа следую2 −1
щих матриц: A, A4 , A−1 A+ 3I, 3AT − 2I.
2 i
8.19. Дана матрица A =
. Найдите собственные числа следующих
i 2
матриц: A, A∗ , A−1 A2 , A+ 3I. 2 −i
8.20. Дана матрица A =
. Найдите собственные числа следующих
i 2
матриц: A, A∗ , A−1 A2 , A +
3I.
1 1+i
8.21. Дана матрица A =
. Найдите собственные числа сле1+i 1
∗ −1 2
дующих матриц: A, A∗ , (A
) A .
a
a
8.22. Дана матрица A = 11 12 . Известны ее определитель и сумма ее
a21 a22
диагональных элементов: det A = −12, a11 + a22 = 4. Найдите собственные
числа матрицы A.
В упражнениях 8.23–8.34 найдите характеристический многочлен, собственные числа и собственные векторы заданных матриц.
1 1
1 1
1 2
.
8.23. A =
. 8.24. A =
. 8.25. A =
0 3
2 2
−1 3
1 0 0
1 3
0 3
. 8.28. A = 0 2 0 .
8.26. A =
. 8.27. A =
−3 1
−3 6
0 0
−3
1 −1 0
2 0 0
1 1 1
8.29. A = 0 2 −1. 8.30. A = 1 2 0. 8.31. A = 2 2 2.
0 0 3
0 1 2
3 3 3
65
1 2 0 0
2 0 0
i 0 0
0 1 2 0
8.32. A = −1 1 1. 8.33. A = 0 0 2. 8.34. A =
0 0 2 1.
0 −1 3
0 −2 0
0 0 0 2
В упражнениях 8.35–8.45 найдите характеристический многочлен, собственные числа и собственные векторы заданных матриц, убедитесь в ортогональности собственных векторов матрицы, соответствующих различным
собственным
числам.
1 4
14 13
1 2i
8.35. A =
. 8.36. A =
. 8.37. A =
.
4
1
13
14
−2i
1
1 −1 1
7 9 5
4 −4 2
8.38. A = −1 1 −1. 8.39. A = 9 21 9. 8.40. A = −4 4 −2.
5 9 7
2 −2 1
1 −1 1
0 0 1
1 1 1
1 0 i
8.41. A = 0 1 0 . 8.42. A = 1 1 1 . 8.43. A = 0 1 0.
1 0 0
1 1 1
−i 0 1
1 −1 −1 −1
6
3 − 3i
4
−1 1 −1 −1
8.44. A = 3 + 3i 10 3 + 3i. 8.45. A =
−1 −1 1 −1.
4
3 − 3i
6
−1 −1 −1 1
В упражнениях 8.46–8.52 найдите собственный ортонормированный
базис матрицы, приведите матрицу к диагональному виду. При выполнении заданий используйте результаты, полученные для соответствующей
матрицы, в упражнениях 8.35–8.45.
7 9 5
14 13
1 2i
8.46. A =
. 8.47. A =
. 8.48. A = 9 21 9.
13 14
−2i 1
5 9 7
4 −4 2
1 1 1
8.49. A = −4 4 −2 . 8.50. A = 1 1 1.
2 −2 1
1 1 1
1 −1 −1 −1
6
3 − 3i
4
−1 1 −1 −1
8.51. A = 3 + 3i 10 3 + 3i. 8.52. A =
−1 −1 1 −1.
4
3 − 3i
6
−1 −1 −1 1
a b
8.53. Покажите, что у матрицы A =
(a, b ∈ R, b 6= 0) не суще−b a
ствует вещественных собственных
чисел.
14 13
8.54.* Для матрицы A =
найдите одну такую матрицу B, для
13 14
которой выполняется равенство B 3 = A. (Воспользуйтесь каноническим
66
разложением матрицы A).
4 −4 2
8.55.* Для матрицы A = −4 4 −2 найдите одну такую матрицу B,
2 −2 1
для которой выполняется равенство B 2 = A. (Воспользуйтесь каноническим разложением матрицы A).
8.56.* Пусть λ является собственным числом унитарной или ортогональной матрицы U . Докажите, что |λ| = 1.
~ есть собственный вектор матрицы A, соответствующий соб8.57. Пусть X
~ является
ственному числу λ. Докажите, что для любого числа c 6= 0 X
собственным вектором матрицы cA, соответствующим собственному числу
cλ.
~ есть собственный вектор матрицы A, соответствующий
8.58.* Пусть X
~ является собственным вектором
собственному числу λ. Докажите, что X
матрицы Am , m = 2, 3, ..., соответствующим собственному числу λm .
~ есть собственный вектор невырожденной матрицы A, соот8.59.* Пусть X
~ является собственветствующий собственному числу λ. Докажите, что X
1
ным вектором матрицы A−1 , соответствующим собственному числу .
λ
~
8.60. Пусть X есть собственный вектор матрицы A, соответствующий соб~ является собственному числу λ. Докажите, что для любого числа c X
ственным вектором матрицы A+cI, соответствующим собственному числу
λ + c.
8.4.
Ответы
8.1. λ = 3. 8.2. λ = 2. 8.3. λ = −4. 8.4. Да. 8.5. λ = 5.
1
1
8.6. λ = 3. 8.7. −3~x. 8.8. 9~x, λ = 9. 8.9. −32~x, λ = −32. 8.10. ~x, λ = .
5
5
1
8.11. λ = 125. 8.12. λ = . 8.13. det A = −24. 8.14. Да, det A = 100.
4
8.15. Нет, det A = 0. 8.16. A : λ1 = 1, λ2 = 3; A3 : λ1 = 1, λ2 = 27;
1
A−1 : λ1 = 1, λ2 = ; AT − 5I : λ1 = −4, λ2 = −2; 2A + I : λ1 = 3, λ2 = 7.
3
8.17. A : λ1 = 0, λ2 = 5; A2 : λ1 = 0, λ2 = 25; матрица A−1 не существует.
1
8.18. A : λ1 = 1, λ2 = −3; A4 : λ1 = 1, λ2 = 81; A−1 : λ1 = 1, λ2 = − ;
3
T
A + 3I : λ1 = 4, λ2 = 0; 3A − 2I : λ1 = 1, λ2 = −11. 8.19. A : λ1 = 2 + i,
2 1
2 1
λ2 = 2 − i; A∗ : λ1 = 2 − i, λ2 = 2 + i; A−1 : λ1 = − i, λ2 = + i;
5 5
5 5
A2 : λ1 = 3 + 4i, λ2 = 3 − 4i; A + 3I : λ1 = 5 + i, λ2 = 5 − i. 8.20. A : λ1 = 1,
1
λ2 = 3; A∗ : λ1 = 1, λ2 = 3; A−1 : λ1 = 1, λ2 = ; A2 : λ1 = 1, λ2 = 9;
3
67
A + 3I : λ1 = 4, λ2 = 6. 8.21. A : λ1 = 2 + i, λ2 = −i; A · A∗ : λ1 = 2 − i,
2 1
λ2 = i; (A∗ )−1 : λ1 = + i, λ2 = −i; A2 : λ1 = 3 + 4i, λ2 = −1.
5 5
~ 1 = α , α 6= 0,
8.22. λ1 = 6, λ2 = −2. 8.23. P2 (λ) = λ2 − 4λ + 3, λ1 = 1, X
0 ~ 2 = β , β 6= 0. 8.24. P2 (λ) = λ2 − 3λ, λ1 = 0, X
~ 1 = −α ,
λ2 = 3, X
β α
~ 2 = β , β 6= 0. 8.25. P2 (λ) = λ2 − 4λ + 4, λ1 = λ2 = 2,
α 6= 0, λ2 = 3, X
2β
α
−
α
i
~ 1,2 =
~1 =
X
, α 6= 0. 8.26. P2 (λ) = λ2 − 2λ + 10, λ1 = 1 + 3i, X
,
α
α
~ 2 = βi , β ∈ C\{0}. 8.27. P2 (λ) = λ2 − 6λ + 9,
α ∈ C\{0}, λ2 = 1 − 3i, X
β
~ 1,2 = α , α 6= 0. 8.28. P3 (λ) = (1 − λ)(2 − λ)(−3 − λ),
λ1 = λ2 = 3, X
α
α
0
0
~
~
~
λ1 = 1, X1 = 0 , α 6= 0, λ2 = 2, X2 = β , β 6= 0, λ3 = −3, X3 = 0 ,
0
0
γ
α
~
γ 6= 0. 8.29. P3 (λ) = (1−λ)(2−λ)(3−λ), λ1 = 1, X1 = 0 , α 6= 0, λ2 = 2,
0
−β
γ
~
~
X2 = β , β 6= 0, λ3 = 3, X3 = −2γ, γ 6= 0. 8.30. P3 (λ) = (2 − λ)3 ,
0
2γ
0
~ 1,2,3 = 0 , α 6= 0. 8.31. P3 (λ) = −λ2 (λ − 6),
λ1 = λ2 = λ3 = 2, X
α
−α − β
γ
2
2
~
~
λ1 = λ2 = 0, X1,2 = α , α + β 6= 0, λ3 = 6, X3 = 2γ, γ 6= 0.
β
3γ
0
3
~
8.32. P3 (λ) = (2 − λ) , λ1 = λ2 = λ3 = 2, X1,2,3 = α, α 6= 0.
α
α
2
~
8.33. P3 (λ) = (i − λ)(λ + 4), λ1 = i, X1 = 0 , α ∈ C\{0}, λ2 = 2i,
0
0
0
~
~
X2 = −βi , β ∈ C\{0}, λ3 = −2i, X3 = γi, γ ∈ C\{0}.
β
γ
68
α
~ 1,2 = 0 , α 6= 0, λ3 = λ4 = 2,
8.34. P4 (λ) = (1−λ)2 (2−λ)2 , λ1 = λ2 = 1, X
0
0
4β
2β
2
~ 3,4 = , β 6= 0. 8.35. P2 (λ) = λ − 2λ − 15, λ1 = 5, X
~ 1 = α , α 6= 0,
X
β
α
0
~ 2 = −β , β 6= 0. 8.36. P2 (λ) = λ2 − 28λ + 27, λ1 = 27,
λ2 = −3, X
β
α
~1 =
~ 2 = −β , β 6= 0. 8.37. P2 (λ) = λ2 − 2λ − 3,
X
, α 6= 0, λ2 = 1, X
α
β
α
i
−
β
i
~1 =
~2 =
λ1 = 3, X
, α ∈ C\{0}, λ2 = −1, X
, β ∈ C\{0}.
α
β
α−β
2
~
α , α2 + β2 6= 0,
8.38. P3 (λ) = −λ (λ − 3), λ1 = λ2 = 0, X1,2 =
β
γ
~
λ3 = 3, X3 = −γ, γ 6= 0. 8.39. P3 (λ) = −(λ − 2)(λ − 3)(λ − 30), λ1 = 2,
γ
−α
β
γ
~
~
~
0 , α 6= 0, λ2 = 3, X2 = −β , β 6= 0, λ3 = 30, X3 = 2γ,
X1 =
α
β
γ
α−β
2
~ 1,2 = α , α2 + β2 6= 0,
γ 6= 0. 8.40. P3 (λ) = −λ (λ−9), λ1 = λ2 = 0, X
2β
2γ
~ 3 = −2γ, γ 6= 0. 8.41. P3 (λ) = −(λ − 1)2 (λ + 1), λ1 = λ2 = 1,
λ3 = 9, X
γ
−γ
α
2
2
~
~
X1,2 = β , α + β 6= 0, λ3 = −1, X3 = 0 , γ 6= 0.
α
γ
−α − β
~ 1,2 = α , α2 + β2 6= 0,
8.42. P3 (λ) = −λ2 (λ − 3), λ1 = λ2 = 0, X
β
γ
~
λ3 = 3, X3 = γ, γ 6= 0. 8.43. P3 (λ) = −λ(λ − 1)(λ − 2), λ1 = 0,
γ
69
−αi
0
~
~
X1 = 0 , α ∈ C\{0}, λ2 = 1, X2 = β, β ∈ C\{0}, λ3 = 2,
0
α
γi
~
X3 = 0 , γ ∈ C\{0}. 8.44. P3 (λ) = −(λ − 2)(λ − 4)(λ − 16), λ1 = 2,
γ
−α
β
~ 1 = 0 , α ∈ C\{0}, λ2 = 4, X
~ 2 = −(1 + i)β, β ∈ C\{0}, λ3 = 16,
X
β
α
γ
~
X3 = (1 + i)γ, γ ∈ C\{0}. 8.45. P4 (λ) = (λ − 2)3 (λ + 2),
γ
−α − β − γ
2
α
~ 1,2,3 =
, α + β2 + γ2 6= 0, λ4 = −2,
λ1 = λ2 = λ3 = 2, X
β
γ
4
4 2
−
δ
3
δ
4 43 32
2
1
~ 4 = , δ 6= 0. 8.54. B =
X
. 8.55. B =
− 3 3 − 3 .
δ
1 2
2
2 1
δ
−
3
3 3
9.
КВАДРАТИЧНЫЕ ФОРМЫ
Подробно теоретический материал этого раздела изложен в учебном
пособии [3].
9.1.
Основные понятия
Пусть
a11 a12 . . . a1n
a21 a22 . . . a2n
A=
..
..
...
.
.
an1 an2 . . . ann
(aij = aji ,
i = 1, . . . , n,
j = 1, . . . , n)
– вещественная симметричная матрица (A = AT ) порядка n.
n
Квадратичной формой
называется функция Φ : R −→ R, которая
x1
~
каждому вектору X = ... ставит в соответствие вещественное число по
xn
правилу
~ = Φ(x1 , . . . , xn ) = (AX,
~ X).
~
Φ(X)
70
~
Матрица A называется матрицей квадратичной формы Φ(X).
Квадратичную форму можно записать используя операцию умножения матриц:
~ X)
~ =X
~ T AX,
~
(AX,
x1
~ = ... :
а также через координаты вектора X
xn
~ X)
~ =
(AX,
n
n X
X
aij xi xj .
i=1 j=1
a b
Рассмотрим квадратичную форму двух переменных. Пусть A =
b c
~ = x . Тогда
– матрица этой квадратичной формы и X
y
a b x
x
a b x
Φ(x, y) = (
,
) = [x y]
= ax2 + 2bxy + cy 2 .
b c y
y
b c y
Аналогично
квадратичная форма
трех переменных с матрицей
a d e
x
~ = y имеет вид
A = d b f и вектором X
e f c
z
a d e
x
x
y , y ) =
Φ(x, y, z) = ( d b f
e f c
z
z
a d e
x
y = ax2 + by 2 + cz 2 + 2dxy + 2exz + 2f yz.
= [x y z] d b f
e f c
z
Нетрудно заметить, что
квадратичную
форму n переменных
с симa11 . . . a1n
x1
.
.
~
..
..
метричной матрицей A =
и вектором X = ... можно
an1 . . . ann
xn
представить в виде
Φ(x1 , . . . , xn ) =
n
X
aii x2i + 2
i=1
71
X
i<j
aij xi xj .
9.2.
Приведение квадратичной формы к каноническому виду
Рассмотрим квадратичную форму n переменных:
~ = (AX,
~ X).
~
Φ(X)
Матрица A квадратичной формы является вещественной симметричной матрицей. Она имеет собственный ортонормированный базис ~u1 , . . .,
~un .
x1
~ = ... можно разложить по этому базису:
Любой вектор X
xn
~ = x0 ~u1 + x0 ~u2 + . . . + x0n~un ,
X
1
2
~ в этом базисе.
где x01 , . . ., x0n – координаты вектора X
Теорема 9.1. Если ~u1 , . . ., ~un – собственный ортонормированный базис матрицы A, составленный из собственных векторов, соответствующих ее собственным числам λ1 , . . ., λn :
A~ui = λi~ui ,
||~ui || = 1,
(~u1 , ~uj ) = 0,
i = 1, . . . , n,
i 6= j,
то в этом базисе квадратичная форма преобразуется к виду
~ = λ1 (x0 )2 + . . . + λn (x0n )2 ,
Φ(X)
1
где λ1 , . . ., λn – собственные числа матрицы A; x01 , . . ., x0n – координаты
~ в выбранном собственном ортонормированном базисе матривектора X
цы квадратичной формы.
Такой вид квадратичной формы называется каноническим.
Пример 9.1. Дана квадратичная форма 6x2 + 4xy + 9y 2 . Найти собственный ортонормированный базис матрицы квадратичной формы и привести квадратичную форму к каноническому виду.
Решение.
Запишем матрицу заданной квадратичной формы:
6 2
A=
.
2 9
Найдем ее собственные числа. Для этого решим характеристическое
уравнение
6−λ
2
det
= 0 ⇔ (6 − λ)(9 − λ) − 4 = 0 ⇔
2
9−λ
⇔ λ2 − 15λ + 50 = 0.
72
Корни уравнения λ1 = 5, λ2 = 10 являются собственными числами
матрицы A.
~ 1 = ~0, где X
~ 1 = x , определим собственРешив уравнение (A − λ1 I)X
y
ные векторы, соответствующие собственному числу λ1 = 5:
1 2 0
1 2 0
x = −2α
⇔
⇔ x + 2y = 0 ⇔
, α 6= 0.
2 4 0
0 0 0
y=α
−2
α
−2
~1 =
Таким образом, любой вектор X
=α
, α 6= 0 является
α
1
собственным вектором, соответствующим его собственному числу λ1 = 5.
Собственные векторы, соответствующие
собственному числу λ2 = 10,
~ 2 = β = β 1 , β 6= 0.
определяются аналогично: X
2β
2
~ 2 = ~0, где
Получите
их самостоятельно (решите уравнение (A − λ2 I)X
~ 2 = x ).
X
y
Поскольку A – симметричная матрица, то ее собственные векторы,
соответствующие различным собственным числам, ортогональны:
~ 1, X
~ 2 ) = −2α · β + α · 2β = 0.
(X
Для каждого
собственного
числа выберем по одному собственному век~a1
−2
1
,
тору: ~a1 =
, ~a2 =
. Затем эти векторы нормируем: ~u1 =
1
2
||~a1 ||
~a
~u2 = 2 , в результате получим собственный ортонормированный базис
||~a2 ||
матрицы A:
" 2 #
" 1 #
√
−√
5
~u1 =
, ~u2 = 25 .
1
√
√
5
5
~ = x с координатами x и y по
Разложим произвольный вектор X
y
этому базису:
" 2 #
" 1 #
√
√
−
x
0
0
0
0
5
~
X = x ~u1 + y ~u2 ⇔
=x
+ y 25 .
y
√1
√
5
5
~ в собственном ортонормированном
Здесь x0 , y 0 – координаты вектора X
базисе матрицы A.
Согласно теореме 9.1 в выбранном базисе квадратичная форма приводится к каноническому виду:
6x2 + 4xy + 9y 2 = 5(x0 )2 + 10(y 0 )2 .
73
Убедимся в этом.
Выразим исходные координаты x, y через новые координаты x0 , y 0 :
(
x = − √2 x0 + √1 y 0 ,
y =
5
5
√1 x0 + √2 y 0 .
5
5
Подставим полученные выражения в квадратичную форму:
2
2
1
6x2 + 4xy + 9y 2 = 6 − √ x0 + √ y 0 +
5
5
1 0
1 0
2 0
1 0
2 0 2
2 0
√ x + √ y +9 √ x + √ y
=
+ 4 −√ x + √ y
5
5
5
5
5
5
4 0 2 4 0 0 1 0 2
2 0 2 3 0 0 2 0 2
=6
(x ) − x y + (y ) + 4 − (x ) − x y + (y ) +
5
5
5
5
5
5
1 0 2 4 0 0 4 0 2
+9
(x ) + x y + (y ) =
5
5
5
= 5(x0 )2 + 10(y 0 )2 .
Квадратичная форма преобразована к каноническому виду.
9.3.
Классификация квадратичных форм
~ = (AX,
~ X)
~ и ее матрица A называются:
Квадратичная форма Φ(X)
~ > 0 для всех X
~ 6= 0;
– положительно определенными, если Φ(X)
~ < 0 для всех X
~ 6= 0;
– отрицательно определенными, если Φ(X)
~ может прини– знакопеременными (знаконеопределенными), если Φ(X)
мать как положительные, так и отрицательные значения;
~ ≤ 0 для всех X
~ 6= 0;
– неположительно определенными, если Φ(X)
~ ≥ 0 для всех X
~ 6= 0.
– неотрицательно определенными, если Φ(X)
Поскольку любая квадратичная форма преобразуется к каноническому виду
~ = λ1 (x0 )2 + . . . + λn (x0n )2 ,
Φ(X)
1
~ = (AX,
~ X)
~ является:
то квадратичная форма Φ(X)
– положительно определенной при λi > 0, i = 1, . . . , n;
– отрицательно определенной при λi < 0, i = 1, . . . , n;
– знакопеременной (знаконеопределенной), если среди собственных чисел
матрицы A есть как положительные, так и отрицательные;
– неположительно определенной при λi ≤ 0, i = 1, . . . , n;
– неотрицательно определенной при λi ≥ 0, i = 1, . . . , n.
74
Любая квадратичная форма всегда принадлежит одному из перечисленных типов.
Проверить положительную или отрицательную определенность квадратичной формы можно также используя способ, называемый критерием
Сильвестра.
Пусть
a11 a12 . . . a1n
a21 a22 . . . a2n
A=
..
..
...
.
.
an1 an2 . . . ann
– квадратная матрица порядка n.
Главными минорами матрицы называются числа
a11 a12 a13
a
a
M1 = a11 , M2 = det 11 12 , M3 = det a21 a22 a23 . . . , Mn = det A.
a21 a22
a31 a32 a33
Теорема 9.2. (Критерий Сильвестра.) Квадратичная форма с
матрицей A:
1) положительно определена тогда и только тогда, когда все главные миноры матрицы A положительны: Mi > 0, i = 1, . . . , n;
2) отрицательно определена тогда и только тогда, когда все главные миноры матрицы A с нечетными номерами отрицательны: M1 < 0,
M3 < 0, . . ., а миноры с четными номерами положительны: M2 > 0,
M4 > 0, . . . .
Пример 9.2. Дана квадратичная форма
Φ(x, y, z) = 6x2 + 19y 2 + 6z 2 + 16xy + 10xz + 16yz.
Определить тип этой квадратичной формы.
Решение. Способ 1. Запишем матрицу квадратичной формы
6 8 5
A = 8 19 8 .
5 8 6
Найдем ее собственные числа:
6−λ
8
5
19 − λ
8 = 0 ⇔ −λ3 + 31λ2 − 111λ + 81 = 0.
det 8
5
8
6−λ
Корни этого уравнения λ1 = 1, λ2 = 3, λ3 = 27 – собственные числа
матрицы квадратичной формы.
75
Все собственные числа матрицы A положительные, следовательно,
квадратичная форма положительно определена.
Способ 2. Воспользуемся критерием Сильвестра. Найдем значения главных миноров матрицы A:
6 8 5
6 8
= 50, M3 = det 8 19 8 = 81.
M1 = 6, M2 = det
8 19
5 8 6
Все главные миноры больше нуля, значит, квадратичная форма положительно определена.
9.4.
Упражнения
В упражнениях 9.1–9.5 задана матрица квадратичной формы. Напишите квадратичную форму, используя разные способы
ее представления.
−1 2 5
2 4
0 −3
9.1. A =
. 9.2. A =
. 9.3. A = 2 4 −3.
4 −3
−3 5
5 −3 7
1 0 −2 −3
3 −1 −4
0 3 0
4
.
9.4. A = −1 0 2 . 9.5. A =
−2 0 5
1
−4 2 1
−3 4 1 −1
В упражнениях 9.6–9.10 запишите матрицу заданной квадратичной
формы.
9.6. Φ(x, y) = x2 − 4xy − 2y 2 . 9.7. Φ(x, y) = −2x2 + 6xy.
9.8. Φ(x1 , x2 ) = 4x21 +3x22 −2x1 x2 . 9.9. Φ(x, y, z) = x2 +z 2 −4xy+6xz −2yz.
9.10. Φ(x1 , x2 , x3 , x4 ) = 2x21 + 3x22 + x24 − 2x1 x2 + 8x1 x4 − 6x2 x4 + 4x3 x4 .
В упражнениях 9.11–9.18 найдите собственный ортонормированный
базис матрицы заданной квадратичной формы, приведите квадратичную
форму к каноническому виду.
9.11.
9.14.
9.17.
7x2 − 12xy − 2y 2 . 9.12. x2 − 4xy + 4y 2 . 9.13. −6x2 − 6xy − 14y 2 .
−4x2 + 4xy − y 2 . 9.15. 6x2 + 4xy + 9y 2 . 9.16. −x2 − 10xy − y 2 .
x2 + y 2 + 4z 2 + 2xy + 4xz + 4yz. 9.18. 3x2 + 5y 2 + 3z 2 − 4xy + 8xz − 4yz.
В упражнениях 9.19–9.25 определите, является ли заданная квадратичная форма положительно (отрицательно, неположительно, неотрицательно) определенной или знакопеременной.
9.19. 3x2 − 8xy − 3y 2 . 9.20. 5x2 − 6xy + 2y 2 . 9.21. −4x2 + 6xy − 5y 2 .
9.22. x2 + 4xy + 4y 2 . 9.23. 17x2 + 17y 2 + 11z 2 − 16xy + 8xz − 8yz.
9.24. 3x2 + 5y 2 + 3z 2 − 4xy + 8xz − 4yz.
9.25. −4x2 − 4y 2 − z 2 + 8xy − 4xz + 4yz.
76
В упражнениях 9.26–9.30 определите, является ли заданная матрица положительно (отрицательно, неположительно, неотрицательно) определенной или знакопеременной.
1 −1 1
2 1
−5 2
9.26.
. 9.27. A =
. 9.28. A = −1 1 −1.
1 3
2 −1
1 −1 1
1 1 1
−11 6 −6
6 −6 3 .
9.29. A = 1 2 1 . 9.30. A =
1 1 3
−6 3 −6
9.31. При каких значениях параметра a квадратичная форма
ax2 − 4xy + y 2 положительно определена?
9.32. При каких значениях параметра a квадратичная форма
−4x2 + 2axy − y 2 отрицательно определена?
В упражнениях 9.33–9.36 приведите квадратичную форму к каноническому виду, запишите уравнение в системе координат, определяемой собственным ортонормированным базисом матрицы квадратичной формы, и
постройте на плоскости линию, координаты которой удовлетворяют заданному уравнению.
9.33. x2 −6xy+9y 2 = 10. 9.34. x2 +8xy+7y 2 = 0. 9.35. 6x2 +6xy+14y 2 = 0.
9.36. 14x2 − 6xy + 6y 2 = −5.
9.5.
Ответы
1 −2
−2 3
4 −1
9.6. A =
. 9.7. A =
. 9.8. A =
.
−2 −2
3 0
−1 3
2 −1 0 4
1 −2 3
−1 3 0 −3
.
9.9. A = −2 0 −1. 9.10. A =
0
0 0 2
3 −1 1
4 −3 2 1
1 1
1 −2
9.11. −5(x0 )2 + 10(y 0 )2 , ~u1 = √
, ~u2 = √
. 9.12. 5(y 0 )2 ,
2
1
5
5
1 −1
1
1 2
1
, ~u2 = √
. 9.13. −15(x0 )2 − 5(y 0 )2 , ~u1 = √
,
~u1 = √
3
5 1 5 2
10
1 −3
1 1
1 −2
0
2
~u2 = √
. 9.14. −5(y ) , ~u1 = √
, ~u2 = √
.
2
1
10 1
5
5
1
1
1
−2
9.15. 10(x0 )2 + 5(y 0 )2 , ~u1 = √
, ~u2 = √
. 9.16. −6(x0 )2 + 4(y 0 )2 ,
2
1
5
5
1 1
1 −1
1 −2
0
2
0 ,
~u1 = √
, ~u2 = √
. 9.17. 6(z ) , например, ~u1 = √
2 1
2 1
5 1
77
1
1
1
1
1 −1
0
2
0
2
0
2
−5 , ~u3 = √ 1 . 9.18. −(x ) +3(y ) +9(z ) , ~u1 = √
0 ,
~u2 = √
30 2
6 2
2 1
1
1 1
1
~u2 = √ 2 , ~u3 = √ −1 . 9.19. Знакопеременная. 9.20. Положитель6 1
3 1
но определенная. 9.21. Отрицательно определенная. 9.22. Неотрицательно определенная. 9.23. Положительно определенная. 9.24. Знакопеременная. 9.25. Неположительно определенная. 9.26. Положительно определенная. 9.27. Отрицательно определенная. 9.28. Неотрицательно определенная. 9.29. Положительно определенная. 9.30. Отрицательно опреде0 2
0
ленная. 9.31. a > 4. 9.32.
−2 < a < 2. 9.33.
(y ) = 1, две прямые: y = 1
1 3
1 −1
и y 0 = −1, ~u1 = √
, ~u2 = √
. 9.34. 9(x0 )2 − (y 0 )2 = 0, две
1
3
10
10 1 1
1 −2
0
0
0
0
прямые: y = 3x и y = −3x , ~u1 = √
, ~u2 = √
.
5 2
5 1
1
1
,
9.35. 15(x0 )2 + 5(y 0 )2 = 0, это уравнение точки (0, 0), ~u1 = √
3
10
1 −3
~u2 = √
. 9.36. 15(x0 )2 + 5(y 0 )2 = −5, это уравнение пустого мно1
10
1 −3
1 1
жества, ~u1 = √
, ~u2 = √
.
10 1
10 3
Список литературы
1. Алгебра и геометрия в примерах и задачах: учеб. пособие: в 2 ч.
Ч. 1 / Н. А. Бодунов, А. А. Дороденков, С. А. Колбина, Н. М. Червинская.
СПб.: Изд-во СПбГЭТУ „ЛЭТИ“, 2020. 64 с.
2. Линейная алгебра: учеб. пособие / А. Л. Белопольский, Н. А. Бодунов, А. Л. Меркулов, А. П. Щеглова. СПб.: Изд-во СПбГЭТУ „ЛЭТИ“,
2012. 140 с.
3. Колбина С. А., Пилюгин С. Ю. Линейная алгебра (дополнительные
главы): учеб. пособие. СПб.: Изд-во СПбГЭТУ „ЛЭТИ“, 2009. 60 с.
4. Беклемишев Д. В. Курс аналитической геометрии и линейной алгебры. М.: Физматлит, 2008. 312 с.
5. Бондарев А. С., Червинская Н. М. Линейная алгебра в примерах и
задачах: учеб. пособие. СПб.: Изд-во СПбГЭТУ „ЛЭТИ“, 2002. 139 с.
6. Типовые расчеты по курсу „Алгебра и геометрия“: учеб. пособие /
А. Л. Белопольский, Н. А. Бодунов, Е. З. Боревич и др. СПб.: Изд-во
СПбГЭТУ „ЛЭТИ“, 2017. 80 с.
78
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
5. ВЕКТОРНАЯ АЛГЕБРА . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
5.1. Векторное пространство R3 . . . . . . . . . . . . . . . . . . . . . 3
5.2. Скалярное произведение векторов в R3 . . . . . . . . . . . . . . 6
5.3. Векторное произведение векторов в R3 . . . . . . . . . . . . . . 11
5.4. Смешанное произведение векторов в R3 . . . . . . . . . . . . . . 14
5.5. Упражнения . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.6. Ответы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
6. ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ ГЕОМЕТРИИ . . . . . . . . . . 20
6.1. Уравнение прямой на плоскости . . . . . . . . . . . . . . . . . . . 20
6.2. Уравнение плоскости . . . . . . . . . . . . . . . . . . . . . . . . . 21
6.2.1.Взаимное расположение двух плоскостей . . . . . . . . . . 23
6.3. Уравнение прямой . . . . . . . . . . . . . . . . . . . . . . . . . . 25
6.3.1.Взаимное расположение прямой и плоскости . . . . . . . . 28
6.4. Упражнения . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
6.5. Ответы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
7. ПРОСТРАНСТВА Cn И Rn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
7.1. Основные понятия . . . . . . . . . . . . . . . . . . . . . . . . . . 38
7.2. Базис в Cn и Rn . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
7.3. Скалярное произведение в Cn и в Rn . . . . . . . . . . . . . . . 45
7.4. Норма векторов в Cn и в Rn . . . . . . . . . . . . . . . . . . . . 46
7.5. Ортогональный базис в Cn (Rn ) . . . . . . . . . . . . . . . . . . 47
7.6. Упражнения . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
7.7. Ответы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
8. СОБСТВЕННЫЕ ЧИСЛА И СОБСТВЕННЫЕ ВЕКТОРЫ
МАТРИЦЫ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
8.1. Основные понятия . . . . . . . . . . . . . . . . . . . . . . . . . . 56
8.2. Самосопряженные матрицы . . . . . . . . . . . . . . . . . . . . . 59
8.3. Упражнения . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
8.4. Ответы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
9. КВАДРАТИЧНЫЕ ФОРМЫ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
9.1. Основные понятия . . . . . . . . . . . . . . . . . . . . . . . . . . 70
9.2. Приведение квадратичной формы к каноническому виду . . . . 72
9.3. Классификация квадратичных форм . . . . . . . . . . . . . . . . 74
9.4. Упражнения . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
9.5. Ответы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Список литературы . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Бодунов Николай Александрович
Дороденков Александр Александрович
Колбина Светлана Анатольевна
Червинская Нина Михайловна
АЛГЕБРА И ГЕОМЕТРИЯ
В ПРИМЕРАХ И ЗАДАЧАХ
Часть 2
Учебное пособие
Редактор Э. К. Долгатов
Подписано в печать 30.03.21. Формат 60×84 1/16. Бумага офсетная.
Печать цифровая. Гарнитура „Times New Roman“. Печ. л. 5,0.
Тираж 744 экз. Заказ .
Издательство СПбГЭТУ „ЛЭТИ“
197376, С.-Петербург, ул. Проф. Попова, 5