През. "Стрела времени и ..."
advertisement

Стрела времени и открытые
динамические системы
Резник Александр Михайлович
Зав. отделом нейротехнологий
Доктор технических наук
Март 2014
СТРЕЛА ВРЕМЕНИ
2
Аристотель: «Время есть нечто, исчисляемое
в движении, когда мы в последнем обращаем
внимание на “до” и “после”».
Popper K. The arrow of time // Nature. – 1956.
Рейхенбах Г. Направление времени. – М.: Иностр.
лит., 1962.
Чернин А.Д. Физика времени. – М., 1987
Кухаренко Ю. А. Рождение стрелы времени из
квантового хаоса// Наука и технология в России.
1997. № 3(20)
ДИНАМИЧЕСКАЯ СИСТЕМА
ОБЩАЯ СИСТЕМА - отношение на
множестве абстрактных объектов:
Объекты входа и выхода:
X {Vi : i I x }
Динамическая система
S ^ { X t , Yt : t T }
3
S ^ {Vi : i I }
Ix Iy
I I x IY
Y {Vi : i I y }
{ X t , Yt , St }
Временные объекты:
Вход: X t выход: Yt состояние:
St
“Претерпеваемым состоянием в одном смысле
называется качество, в отношении к которому
возможны изменения, … а в другом смысле так
называются реальные процессы или изменения в
области этих свойств”
Аристотель
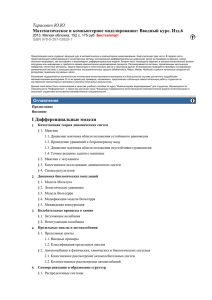
Динамическая система и
внешний мир
Вход Xt
Выход Yt
СИСТЕМА
Состояние
Время
St
ВНЕШНИЙ МИР
4
Yt F ( St , X t )
St ( St , X tt )
S t
t
( St , X t )
Время
Концепция открытого внешнего мира:
поведение динамической системы не зависит
от состояния внешнего мира.
(в пределах интервала наблюдения системы)
Проблема обращения времени 5
Концепция “открытого внешнего мира” позволяет обращать
уравнение состояния, пользуясь линейным приближением:
S t ( S t 1 , X t ) ( X t ) S t 1
( X t ) St S
t 1
S tT1
St
T
S t 1S t 1
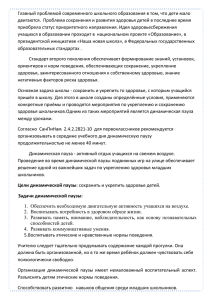
На этом основаны методы линейной регресии, применяемые для
управления динамическими системами (ПИД - контроллеры) или для
прогнозирования будущего поведения процессов во времени.
Цель
управления
Уставка
Критерий
оптимальности
Модель
объекта
ПИДконтроллер
Объект
управления
выход
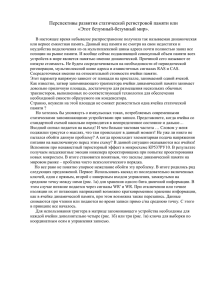
The RESTORE Reconfigurable Control for Tailless Fighter Aircraft X-36 Flight
Test Program successfully demonstrated a damage/fault tolerant neural
network adaptive flight control system on a tailless unmanned air vehicle.
6
Figure 1. The X-36 demonstrates the
maneuver capability of a tailless fighter
Figure 2. Boeing's RESTORE technology is based
on dynamic inversion and minimizes dependence
on system identification. This modular structure is
particularly conducive for technology transfer to
other flight control systems using dynamic
inversion, including that found on the X-36.
Примеры нейроуправления
Последовательное
нейроуправление
Нейронная
сеть
Объект
управления
Адаптивное нейроПИД- управление
Схема метода адаптивной критики
режим управления
режим обучения
7
Открытые динамические
системы
8
Открытая система в теории систем — система, которая
непрерывно взаимодействует с ее средой. Взаимодействие может принять форму информации, энергии, или
материальных преобразований на границе с системой, в
зависимости от дисциплины, которая определяет
понятие.
(Википедия)
“Отправной точкой процесса создания любых моделей
являются наблюдения и предположение о существовании взаимосвязи между ними. Первичное понятие
системы следовало бы определять опираясь как раз на
подобные данные“.
М. Месарович, Я. Такахара Общая теория систем.
Математические основы И-во МИР: М. 1978, стр.293.
Наблюдения и наблюдатели
9
Наблюдение – взаимодействие динамических систем,
выступающих как объект и субъект наблюдения, сопровождаемое изменением их состояний. Состояние – это то,
что изменяется в динамической системе при наблюдении.
Множество состояний динамической системы конечно.
.
Инициатором наблюдения выступает объект, изменяющий
свое состояние. Выступая как субъект, динамическая
система пребывает в стабильном состоянии, в ожидании
наблюдения. При поступлении наблюдения субъект
становится объектом, инициирует ответное наблюдение и
возвращается в следующее стабильное состояние.
Последовательности наблюдений 10
и циклы состояний системы
xt
Наблюдатель как
“черный
ящик”
.
Последовательность
наблюдений
st
{xt , yt }ti T ;
i
Последовательность
состояний наблюдателя
i
yt *
{ti ti t i1 }tiT
{x , y }t0 t [st0 st ]
Циклы состояний
si
si
si
Наблюдения
Время
Состояния
Замкнутый мир
Внешний мир
Динамич.
система
Субъект
Объект
Окружение
Объект
Наблюдения
.
11
st 1
s
Субъект
t
Цикл St
st
xt
st#1
st
st 1
yt
s
#
t
x(t 1)
y(t 1)
s
#
t 1
{ yt , x(t 1) , y(t 1) , x(t 2) }
st 3
x(t 2) y(t 2)
#
t 2
s
x(t 3)
Состояния
системы
Состояния
окружения
Пространство замкнутого мира 12
Базисное
множество:
.
Пространство
наблюдателя:
,
.
,
tT (st s # );
t
st st ;
;
Образование луча
Пустые субъекты
t
s # st# #
t
st st ; rs s T
t
Поведение системы в базисе:
Траектория в пространстве:
Векторы наблюдения:
st s#
t
{st }tT T
{ st }tT T
yt r#t
xt r t
j
объект
(
i
i i
ii
r t
i i
субъект
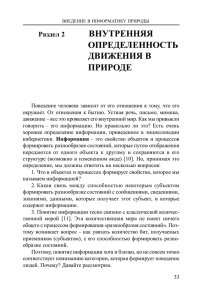
Материальный замкнутый мир 13
st
xt
.
st#1
st
st 1
yt
s
#
t
x(t 1)
Замкнутая траектория лучей
= искривление пространства
в замкнутом мире
y(t 1)
st#1
st 3
x(t 2) y(t 2)
st#2
x(t 3)
{ yt , x( t 1) , y( t 1) , x( t 2 ) }
{t# , ( t 1) , (#t 1) , ( t 2 ) }
Замкнутость траекторий лучей отвечает проекции линейной
последовательности наблюдений на множество циклов
состояний динамической системы. Искривление пространства
отражает материальную природу открытой динамической
системы и ее окружения
Уиллер Дж. Гравитация, нейтрино и вселенная. -М.-ИЛ,1962:
Пенроуз Р. Новый ум короля: М.: И-во. ЛКИ, 2008,
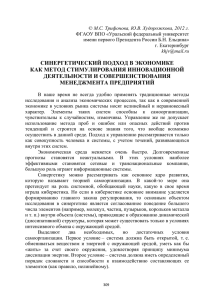
Структура замкнутого мира
динамической системы
Окно наблюдений
Последовательн
ость
наблюдений.
Замкнутый мир
система
Виртуальные
партнеры
окружения
Траектории
внутренних
наблюдений
14
15
Енергия замкнутого мира
Квант энергии фотона:
h
E h
- частота,
- постоянная Планка.
Потенциальная энергия диполя:
Edip h dip ;
c
1
ДИПОЛЬ - наипростейший
замкнутый мир динамической
системы
ПС-пустой
субъект
Элемент
базиса
dip c1
-скорость луча
- кривизна замкнутого мира диполя
- размер ПС
При разрушении замкнутого мира его потенциальную
энергию получает луч, образованный свободными
элементами базиса
16
Сложные замкнутые миры
В сложном замкнутом мире система и ее окружение - это
множества, обменивающиеся подмножествами базисных
элементов, образующимих замкнутые миры, отражающие
различные значения наблюдений. Такие миры обладают
пространственной ориентацией, которая может влиять на
условия наблюдения
Спин
Вероятность обмена наблюдениями между ними зависит
от расстояния, спина, взаимной ориентации, которые не
доступны для наблюдения. Для описания таких обменов
применяют понятие поля как распределения вероятности
результата наблюдения в пространстве-времени.
17
Линейная модель мира
Уравнение состояния
динамической системы:
St ( St 1 , t )
t ( t 1 , r ,t ) ( t k ,{ r ,t }t k t ) ~
t 1 ( t 1 ) r ,t t 1 Wt 1 r ,t
Модификация линейного оператора при наблюдении:
xt xt st 1 st Wt 1 Wt
Дополнение линейного
пространства
WT T T
t 1 t
x
t 1
( I Wt ) r ,t 1 ( r ,t 1 )T ( I Wt )
Wt 1 Wt
( r ,t 1 )T ( I Wt ) r ,t 1
Метрика пространства
t
dt 1, Lt ( r ,t 1 )T ( I Wt ) r ,t 1
Развивающиеся системы 18
1. В сложном замкнутом мире обмен наблюдениями
происходит в форме обмена подмножествами базиса,
образующими собственные замкнутые миры.
2. Возможно образование замкнутых миров, представляющих генетические цепочки, способные наследовать
свойства исходной динамической системы.
3. Образование генетических цепочек составляет основу
развития, реализующего процессы размножения-гибели.
4. Развивающаяся система отражает предисторию
развития генотипа во времени.
Стохастическая динамическая
система
,
Pt (Y / X )
ВходX(t)
Оточуюче середовище
Pt (S )
-вероятность S
экземпляр системы
,
19
( S , Y / X )
ВыходY(t
(Y / S , X ) - Генотип системы
Pt (Y / X ) Pt ( S )(Y / S , X ) - Уравнение вход/выход
Pt ( S ) Pt ( S )Q( St , St , X tt ) - Уравнение состояния
Q( St , St , X tt ) - Оператор развития
Инфинитезимальный оператор 20
развития
Pt ( S ) Pt ( S ) Q( St , St , X tt )
t
t
Pt ( S )
Pt ( S ) H ( S t , X t )
0
t
Инфинитезимальный оператор выражает скорость изменения
вероятности пребывания системы в состоянии S при данном
значении входа. Эволюцию системы описывает выражение:
.
Pt ( S ) 0
t
Pt ( S ) Pt0 ( S ) exp H ( S , X )
t0
1.Різник О.М. Загальна модель розвитку //
Математичні машини і системи. -2005.
№ 1. –С. 84-98.
Открытая динамическая
нейронная сеть
Z (t ) {z } ;
*
* N*
n n 1
21
N * N1 N N 0
Условие аттрактора:
Z * (t ) F (S * (t )) W *Z * (t ); ii 0
W 11Z 1 (t ) W 1 Z 1 (t ) W 1 Z 0 (t )
S * (t ) W 1Z 1 (t ) W Z 1 (t ) W 0 Z 0 (t )
W 01Z 1 (t ) W 0 Z 1 (t ) W 0 Z 0 (t )
Набор динамических атракторов:
1,1
1,m
1, M
R ... R ...
R
* R1, 0 ... R1,m1... R1,M 1
R 0,1... R 0,m .... R 0,M
* W **
W ( )
*
1
*
*
Динамические аттракторы 22
Динамические хопфилдовские
ансамбли коры мозга
Хопфилдовский
ансамбль
выходи
ансамбля
i-й ансамбль
входы
j-й ансамбль
23
Выводы
24
1. Парадокс «стрелы времени» решается просто: не
существует динамических систем, уравнения состояний
которых не имеют обратных решений.
2. Понятие наблюдения является универсальным и
основанная на нем модель динамической системы
может использоваться в любой предметной области.
3. Модель открытой динамической системы на основе
понятия наблюдения позволяет представить общие
принципы развития и эволюции в природе и обществе.
4. Структуры нервной ткани мозга отражают процесс
развития интеллекта.
5. Есть основания полагать, что деятельность мозга
представляет динамический обмен сообщениями в
замкнутых динамических системах.