На правах рукописи - Уральский государственный горный
advertisement

На правах рукописи
Двинина Людмила Борисовна
ОБОСНОВАНИЕ ДИНАМИЧЕСКИХ РЕЖИМОВ
ПРИ ПРОЕКТИРОВАНИИ ШАХТНЫХ ПОДЪЕМНЫХ
УСТАНОВОК
Специальность 05.05.06 – «Горные машины»
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
кандидата технических наук
Екатеринбург - 2008
Работа выполнена в Государственном образовательном
учреждении высшего профессионального образования «Уральский
государственный горный университет»
Научный руководитель –
доктор технических наук, доцент
Ляпцев Сергей Андреевич
Официальные оппоненты:
доктор технических наук, профессор
Кожушко Герман Георгиевич,
кандидат технических наук, доцент
Полухина Наталья Владленовна
Ведущая организация – ОАО Институт «Уралгипроруда»
Защита состоится «29» декабря 2008 г. в 10 часов на заседании
диссертационного совета Д. 212.280. 03 при ГОУ ВПО «Уральский
государственный горный университет» в зале заседаний Ученого
совета по адресу: 620144, г. Екатеринбург, ул. Куйбышева, 30
С диссертацией можно ознакомиться в научной библиотеке
ГОУ ВПО «Уральский государственный горный университет».
Автореферат разослан «28» ноября 2008 г.
Ученый секретарь диссертационного совета
Хазин М.Л.
1
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность темы. В настоящее время, когда спрос на полезные
ископаемые
продолжает
оставаться
высоким,
отечественная
горнодобывающая промышленность нуждается в высокопроизводительных и
надежных
шахтных
подъемных машинах для поддержания своей
конкурентоспособности. Вопросам совершенствования подъемных установок
и разработки теории рудничного подъема уделялось первостепенное
внимание на протяжении всей истории развития добычи полезных
ископаемых подземным способом. Однако, несмотря на долгую и богатую
историю развития темы,
практика проектирования и эксплуатации
подъемных установок показывает, что технические возможности выбранного
оборудования часто остаются недоиспользованными, а размеры и вес
оборудования завышенными.
Это объясняется тем, что исследование
динамических режимов
шахтного подъема проводится без учета импульсных характеристик, таких
как импульс действующего усилия, импульсное ускорение, импульсный
коэффициент
массивности
установки,
относительная
скорость,
относительное время движения, оценить влияние которых на динамические
параметры оказалось возможным на основе теории подобия по принятым
критериям подобия. Поэтому актуальной остается задача совершенствования
методов расчета и проектирования динамических режимов шахтных
подъемных установок с целью обеспечения рациональных технических
характеристик.
Цель работы - научное обоснование и разработка проектных
рекомендаций
по
выбору
рациональных
динамических
режимов,
способствующих повышению эффективности работы шахтных подъемных
установок.
Идея работы заключается в применении методов теории подобия для
разработки проектных рекомендаций, позволяющих выбирать рациональные
динамические режимы шахтных подъемных установок.
2
Научная новизна результатов исследований состоит в разработке
теоретической
динамических
и
методологической
режимов
шахтного
базы
выбора
подъема
на
рациональных
основе
критериев
механического подобия подъемных установок, что включает:
- определение кинематических, динамических и электродинамических
характеристик подъемных установок с учетом импульсных параметров
динамических режимов при различной степени уравновешенности шахтного
подъема и различных графиках скорости;
- определение критериев механического подобия шахтных подъемных
установок;
- разработку проектных рекомендаций и динамической классификации
подъемных установок
по принятым критериям подобия, позволяющих
рационализировать выбор динамических режимов шахтного подъема.
Научные положения, выносимые на защиту:
1. Расчеты по безразмерным параметрам и показателям характеризуют
подъемную установку как единую электромеханическую систему, дополняя и
уточняя конструктивные расчеты по размерным параметрам и показателям.
2.
Кинематические,
динамические
и
электродинамические
характеристики подъемных установок зависят от импульсных параметров:
импульса
действующей
коэффициента
силы,
массивности
импульсного
установки,
ускорения,
относительной
импульсного
скорости,
относительного ускорения и относительного времени движения.
3. Критериями механического подобия шахтных подъемных установок
являются степень статической неуравновешенности подъема, относительное
ускорение, степень неполноты графика скорости (множитель скорости),
относительное время движения, коэффициент, учитывающий условия
охлаждения двигателя,
относительная длительность паузы подъема,
коэффициент асимметрии графика скорости.
4. Проектные рекомендации и динамическая классификация по
установленным критериям подобия позволяют выбирать рациональные
3
динамические режимы для повышения эффективности работы шахтных
подъемных установок.
Методы исследования: математическое моделирование динамических
процессов методами теории подобия, прикладной динамики шахтных
подъемных
установок, теории
механики,
теории
механизмов и
численного
решения
машин, теоретической
систем
алгебраических,
дифференциальных и интегральных уравнений.
Обоснованность и достоверность научных результатов обеспечена
использованием
методов
моделирования,
построенных
на
критериях
подобия, и подтверждена строгостью математических выкладок, сравнением
теоретических исследований с практическими данными по шахтному
подъемному оборудованию, а также с результатами исследований других
авторов.
Расхождение
результатов
теоретических
исследований
с
практическими данными не превышает 10%.
Практическая ценность диссертации состоит в разработке проектных
рекомендаций в виде диаграмм и уравнений подобия, позволяющих
выбирать
рациональные динамические режимы шахтных подъемных
установок
на стадии проектирования и модернизации существующего
оборудования
Апробация работы. Основные положения и научные результаты
обсуждались
на
Всероссийской
научно–технической
конференции
«Математическое моделирование механических явлений» (г. Екатеринбург,
2004
г.),
на
3-й
Международной
научно–технической
конференции
«Нетрадиционные технологии и оборудование для разработки сложно структурных месторождений полезных ископаемых» (г. Екатеринбург,
2005 г.),
на
научно–технической
конференции
«Математическое
моделирование механических явлений» (г. Екатеринбург, 2007 г), на 4-й
Международной
оборудование
научно–технической
для
горной
и
конференции
нефтегазовой
«Технологическое
промышленности»
(г. Екатеринбург, 2006 г.), на 6-й Международной научно–технической
4
конференции «Технологическое оборудование для горной и нефтегазовой
промышленности» (г. Екатеринбург, 2008 г.).
Публикации. По теме диссертации опубликовано 7 печатных работ,
одна из которых входит в список рекомендованных ВАК.
Структура и объем работы. Диссертация состоит из введения, пяти
глав,
заключения,
приложений,
библиографического
списка
из
85
наименований; содержит 127 страниц машинописного текста, 1 таблицу,
42 рисунка.
ОСНОВНОЕ СОДЕРЖАНИЕ РАБОТЫ
1. Состояние вопроса и задачи исследований
Важнейшими факторами надежного, эффективного и безопасного
функционирования подъемных машин являются совершенные методы
расчета
при
проектировании
и
модернизации
электромеханического
оборудования шахтного подъема.
Основой
для
проектирования
подъемных
установок
служат
фундаментальные работы основоположников российской школы горных
механиков М. М. Федорова, А. П. Германа, В. С. Тулина, Ф. В. Флоринского,
Б. В. Уманского, Ф. Н. Шклярского, З. М. Федоровой, А. С. Ильичева, Г. М.
Еланчика, С. А. Казака, А. И. Илюхина, А. Г. Степанова и др. ученых.
Анализ современных методик расчета и практики проектирования
шахтного подъема выявил принципиальные моменты, ограничивающие
возможности достоверной оценки переходных режимов шахтного подъема,
такие как:
1) методики проектирования динамических режимов базируются на
абсолютной системе единиц без учета относительных безразмерных
параметров и показателей, поэтому не приняты во внимание такие важные
характеристики, как импульс действующей силы, импульсное ускорение
подъема, относительная скорость движения, относительное ускорение,
относительное время движения;
5
2) рекомендации на проектирование даются не по всему комплексу
параметров и показателей, а по отдельным признакам, например, по весу
полезного груза Q , по скорости движения Vmax с учетом динамической
постоянной подъема
C , по времени движения
T
и т. д., причем
наблюдается большой диапазон значений выше указанных рекомендаций у
различных авторов;
3) существуют различные подходы при определении константы
динамического режима и массивности установки, что приводит к большому
разбросу значений этих величин;
4) величина, названная механической постоянной времени движения
Tм и применяемая при исследованиях переходных некруговых процессов,
некритично рекомендована для исследования замкнутых круговых процессов
шахтного подъема.
При исследованиях динамических режимов шахтного подъема единых
результатов достигнуто не было в силу того, что они изолированно
рассматривали частные стороны единого сложного электромеханического
процесса, так как базировались на абсолютных параметрах и показателях.
Изучение динамических процессов в целом, во всем многообразии
основных и сопутствующих факторов оказалось возможным на основе
теории подобия, базирующейся на безразмерных определяющих параметрах,
так называемых критериях подобия.
Учение о подобии явлений представлено в трудах Ньютона, Бертрана,
Букингама, Релея, Рейнольдса, Нуссельта, а позднее в трудах российских
ученых А. А. Федермана, Л. И. Седова, М. В. Кирпичева, Г. К. Дьяконова,
В. А. Веникова, А. А. Гухмана и др. исследователей.
На
основании
проведенного
анализа
состояния
вопроса
для
достоверной оценки динамических режимов шахтных подъемных установок
с
целью
рационального
выбора
поставлены следующие задачи:
электромеханического
оборудования
6
- исследовать кинематические, динамические и электродинамические
характеристики подъемных установок в относительных единицах с учетом
импульсных параметров динамических режимов при различной степени
уравновешенности шахтного подъема и различных графиках скорости;
- определить критерии механического подобия шахтных подъемных
установок;
- разработать проектные рекомендации на основе уравнений и
диаграмм
подобия
по
установленным
критериям
с
целью
выбора
рациональных динамических режимов шахтных подъемных установок;
- разработать динамическую классификацию подъемных установок на
основе относительных динамических параметров;
- систематизировать задачи прикладной динамики шахтного подъема
путем объединения их по подобным эксплуатационным режимам на основе
проектных диаграмм подобия.
2. Исследование кинематического и динамического подобия
импульсов усилий шахтных подъемных установок
Выбор критериев подобия переходных режимов подъемных установок
возможен путем приведения основного динамического уравнения шахтного
подъема к безразмерному виду. Общим динамическим уравнением для всех
видов подъемных установок является уравнение
F Fст Fд kQ sin (p q)( L 2x) sin ma ,
(1)
где F – усилие на ободе барабана; Fст – усилие от статических сопротивлений;
Fд – динамическая составляющая движущего усилия; k – коэффициент
шахтных сопротивлений; Q – вес поднимаемого груза; p – вес одного метра
головного каната; q – вес одного метра хвостового каната; L , ( H ) –
наклонная (вертикальная) высота подъема; – угол наклона ствола;
m – приведенная масса установки; a – линейное ускорение или замедление
установки.
7
В технической литературе коэффициент шахтных сопротивлений для
разных установок имеет разные значения и принимается в пределах
k 1,05 1,25 .
Усилие от статических сопротивлений определяется по формуле
Fст Fст.с Fст.х ,
(2)
где Fст.с - постоянная составляющая статического усилия, рассматриваемая в
данной работе в виде следующей зависимости:
Fст.с k ст Q ,
(3)
где k ст - коэффициент, учитывающий не только шахтные сопротивления, но
число сосудов и угол наклона ствола; k ст k sin .
Fст.х - переменная составляющая статического усилия
Fст.х (p q)(L 2x ) sin .
Для вертикального подъема с высотой
(4)
H угол наклона ствола
900 , sin 1,0 , и при начальном значении x 0 общим динамическим
уравнением для всех видов подъемных установок следует считать следующее
уравнение, преобразованное из уравнений (1)…(4):
F Fст.с (p q) H ma .
(5)
В относительных (безразмерных) единицах уравнение (5) называется
критериальным и принимает вид
f
F
2x
1 1 x 1
,
Fст.с
H
(6)
где - степень статической неуравновешенности подъема, представляющей
отношение переменной составляющей статического усилия к его постоянной
составляющей
Fст.х (p q) H
,
Fст.с
k ст Q
(7)
- относительное ускорение
ma
,
Fст .с
(8)
8
x - текущее значение статической неуравновешенности подъема
2x
2x
x 1
или x 1
.
L
H
(9)
Безразмерные параметры и связаны между собой уравнением (6),
которое характерно для динамических режимов всего многообразия
шахтного
подъема.
Эти
параметры
представляют
собой
отношения
одноименных величин, имеющих одно и то же значение в сходственных
точках подобных явлений, поэтому могут быть приняты за критерии подобия
динамических режимов шахтных подъемных установок.
Учет импульсных характеристик переходных режимов шахтного
подъема позволил в представленной работе установить
подобия, как:
такие критерии
– относительное время движения сосуда; – степень
неполноты графика скорости; s – коэффициент асимметрии графика
скорости; – коэффициент, учитывающий условия охлаждения двигателя;
– относительная длительность паузы. Указанные критерии характеризуют
подъемную установку как единую электромеханическую систему, поэтому в
данной диссертационной работе были положены в основу проектных
рекомендаций.
Электромеханические
процессы
шахтного
подъема
могут
быть
представлены импульсами сил при разгоне, установившемся движении и
торможении, а также импульсным ускорением подъема, импульсным
коэффициентом
массивности
установки,
относительной
скоростью,
относительным временем движения и относительным ускорением подъема.
В уравнении импульса действующей силы учитывается время действия
t
силы:
S F dt .
(10)
0
В этом случае импульс движущего усилия
S S1 S2 S3
(11)
9
где
S1 – импульс движущего усилия при разгоне; S2 – импульс движущего
усилия при равномерном движении; S3 - импульс движущего усилия при
торможении.
Импульсный характер переходных режимов исследован при различной
степени уравновешенности подъемной установки, т.е. для случаев статически
уравновешенной, неуравновешенной и переуравновешенной установок.
При различных графиках скорости возможны еще три вида минимумов
импульса движущего усилия, такие как:
1) минимум импульса среднеквадратичного усилия;
2) минимум импульса эквивалентного усилия;
3) минимум импульсов сил, формирующихся за счет скорости
вращения вала двигателя.
Выбор режимов по минимумам импульсов среднеквадратичного и
эквивалентного
усилий
обеспечивает
рациональные
показатели
динамических режимов такие как, безусловный минимум эквивалентного
усилия,
безусловный
максимум
относительной
производительности
установки, снижение габаритов, веса и расхода электроэнергии.
Выбор режимов по минимуму импульсов сил, формирующихся за счет
скорости вращения вала двигателя, возможен не только для любого графика
скорости, но и для любой заданной частоты операций.
3. Исследование электродинамического подобия эквивалентных
усилий и мощности привода и шахтного подъема
Форма графиков скорости, как показали исследования, существенно
влияет на все параметры переходных режимов, тем самым, определяя вид
критериев подобия и содержание диаграмм подобия динамических режимов.
Мощность
на
валу
эквивалентная мощность
редуктора по формуле
подъемного
двигателя
определяется
как
на окружности органа навивки с учетом КПД
N дв
Nэ
.
р
(12)
10
В свою очередь, эквивалентная мощность подъема определяется с
учетом эквивалентного усилия и максимальной мощности подъема по
Nэ
формуле
где
Fэ Vmax
,
1000
Fэ - эквивалентное усилие подъема;
(13)
Vmax - максимальная скорость
подъема.
Эквивалентное
усилие
подъема
определяется
с
учетом
среднеквадратичного усилия и условий охлаждения двигателя по формуле
Fэ
где
Fср.к
,
(14)
Fср.к - среднеквадратичное усилие; - коэффициент, учитывающий
1
условия охлаждения двигателя 0,25 .
Так как коэффициент представляет функциональную зависимость
f (, ) , то он является параметром эквивалентных значений усилий и
мощности, следовательно, может быть признан за один из критериев подобия
динамических режимов. При разработке диаграмм подобия были приняты
следующие значения:
1,0 ; 1 0,05 ; 1,15 .
Эквивалентное усилие и эквивалентная мощность при любых графиках
скорости
определены
среднеквадратичного
с
учетом
усилия
для
принятых
статически
критериев
подобия
и
уравновешенного
и
неуравновешенного подъемов.
В условиях параболического графика скорости при статически
уравновешенном подъеме среднеквадратичное усилие определяется по
формуле
Fср.к Fст2 .с (1
12
),
4
(15)
а для статически неуравновешенного подъема среднеквадратичное усилие
определяется по формуле
Fср.к y T 1 Fст2 .с [1 12(2 0,4)] ,
(16)
11
где
Fср.к - среднеквадратичное усилие подъема;
Fст.с - постоянная
составляющая статического усилия; T - время движения сосуда.
В условиях трапецеидального графика скорости среднеквадратичное
усилие подъема определяется как сумма интегралов:
T
Fср.к
F dt T
2
1
.
(17)
0
Учет импульсных характеристик движущих усилий приводит к
выражению для расчета среднеквадратичного усилия по формулам (18) и
(19), т.е. для уравновешенного подъема
F dt F
2
2
ст .с
T m 2 Vmax (a1 a 3 ) ,
(18)
для неуравновешенного подъема
F dt F
2
2
ст .. с
Относительное
p 2 H 2 T m 2 Vmax (a 1 a 3 ) 4pHmV max
среднеквадратичное
усилие
(4 )
.
3
(19)
подъема
при
неравнобедренном графике скорости для статически уравновешенного
подъема
При
ср.к
Fср.к
Fст.с
F dt
2
Fст2 .с T
равнобедренном
2 3
1
.
( 1)(1 s 2 ) 4
графике
скорости
(20)
относительное
среднеквадратичное усилие подъема для статически уравновешенного
подъема
ср.к
Fср.к
Fст.с
23
1
,
( 1) 4
(21)
для статически неуравновешенного подъема
ср.к
23
4
2
4
{1
(4 ) [( 4 ) 2 (3 4)]} .
4
2
( 1)
3
15
(22)
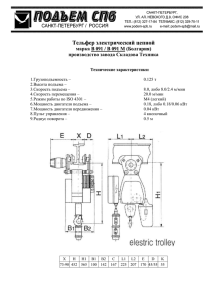
Сравнительная оценка параболического и трапецеидального графиков
скорости показана на рис.1 в виде следующих отношений:
пар N э.пар Fпар
;
;
,
тр N э. тр Fтр
12
где
пар ,
тр
- коэффициенты пусковых перегрузок двигателя
параболического и трапецеидального графиков скорости.
Рис.1. Сравнение параболического и трапецеидального графиков
скорости по эквивалентным значениям усилия, мощности
и пусковой перегрузке двигателя
4. Уравнения подобия и диаграммы подобия динамических
режимов шахтного подъема
Уравнения подобия шахтных подъемных установок представлены
формулами
отношений
абсолютных
параметров
и
показателей,
13
характеризующих динамические режимы двух и более установок, при
равенстве следующих критериев подобия:
2 1 , 2 1 , 2 1 ,
s2 s1 , 2 1 , 2 1 , 2 1 , Vmax 2 Vmax 1 .
(23)
При полном динамическом подобии, т.е. при равенстве массивностей
установок
2 1 ,
уравнениями подобия следует считать следующие
зависимости:
ускорений
a 2 a1 ;
(24)
скоростей
Vmax 2
H2
;
Vmax 1
H1
(25)
времени движения
T2
H2
;
T1
H1
(26)
эквивалентных усилий
Fэ 2 k ст 2 A час2 H 2
;
Fэ1 k ст1A час1 H1
(27)
относительной производительности
эквивалентных мощностей
быстродействия установок
A F 2 k ст1 H1
;
A F1 k ст 2 H 2
(28)
N э 2 Fст.с 2 H 2
;
N э1 Fст.с1 H1
(29)
Б2
H1
.
Б1
H2
(30)
Рассмотрены уравнения подобия также при частичном (неполном)
динамическом подобии, когда не существует равенства всех независимых
критериев подобия, т.е. при неравенстве массивностей установок 2 1 .
Уравнения подобия показывают, что самые разные подъемные
установки – вертикальные, наклонные и т.п. могут иметь динамически
14
подобные режимы и сами могут быть подобными, и, наоборот, однотипные
установки могут иметь неподобные динамические режимы.
Это объясняется тем, что динамические режимы имеют большое
количество не только абсолютных, но и относительных параметров и
показателей, тогда как в существующей литературе рекомендации на
проектирование даются лишь по отдельным признакам.
С помощью
уравнений подобия появляется возможность выбора
рациональных динамических режимов по многим параметрам и показателям,
определяющих
наименьшие
энергетические
затраты
и
наименьшие
габаритные размеры шахтных подъемных установок.
Наряду с критериями подобия при разработке диаграмм подобия
учтены показатели динамического режима. Моделью для таких показателей
явился динамический режим любой проектируемой или действующей
установки. Экстремумы показателей на диаграммах подобия выражены в
виде рельефных линий, что позволило осуществить визуальный выбор
требуемого режима. В представленных исследованиях приняты следующие
показатели динамического режима:
- тепловые потери в двигателе;
- эквивалентное усилие и эквивалентная мощность;
- пусковая перегрузка двигателя;
- импульсы действующего и эквивалентного усилий;
- относительная производительность установки;
- КПД рекуперации энергии при торможении;
- КПД, учитывающий потери избытка кинетической энергии установки
при механическом торможении;
- КПД, учитывающий реостатные потери энергии;
- КПД, учитывающий комбинацию двух выше указанных потерь
энергии.
15
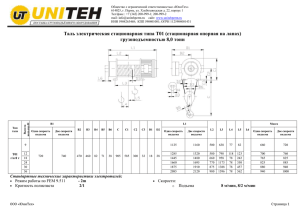
Рассмотрены элементы кинематики и динамики в безразмерных
величинах, а также условные и безусловные экстремумы динамических
режимов электропривода шахтного подъема (рис.2).
Рис. 2. Безразмерные усилия неуравновешенного подъема f
при равнобедренном графике скорости и коэффициенте
асимметрии s 0,0
Определена
установки:
относительная
A
безразмерная
AF
c A Tм ( 2 w ) 2 .
2
производительность
(31)
16
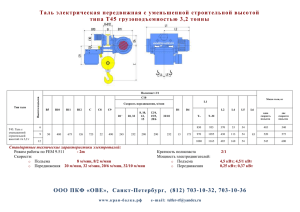
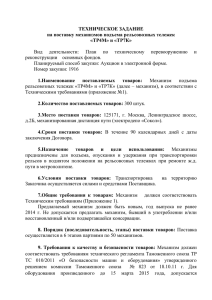
На рис. 3 показано, что максимум производительности A зависит в
большей степени от времени движения и
в меньшей степени от формы
графика скорости.
Рис.3. Зависимость относительной производительности A от
времени движения и степени неполноты графика скорости
В существующих методиках выбор динамического режима обычно
производится по одному из параметров, например, по скорости движения или
по перегрузочной способности двигателя, что нередко приводит к
ошибочным результатам при выборе электромеханического оборудования.
В представленной работе рассмотрен выбор динамического режима по
скорости движения с учетом таких параметров, как тепловые потери в
двигателе и перегрузочная способность двигателей.
17
Диаграммы подобия динамических режимов шахтного подъема
построены для равнобедренных графиков скорости, однако с помощью этих
диаграмм можно
решать все вопросы динамических режимов и для
неравнобедренных графиков скорости. Рельеф диаграмм подобия наглядно
показывает все условные и безусловные экстремумы параметров и
показателей, позволяющих визуально оценивать и выбирать заданный режим
из множества режимов. На рис. 3 указаны рекомендации в виде буквенных
обозначений,
данные
Г.М. Еланчиком
прослеживается
и
в
свое
проф.
историческая
время
акад.
В.С. Тулиным.
тенденция
М.М. Федоровым,
В
проф.
этих
рекомендациях
повышения
быстродействия
подъемных машин.
Разработаны методы выбора рациональных параметров шахтных
подъемных установок по диаграммам подобия, при которых заданные
энергетические затраты обеспечивают максимальные КПД установок.
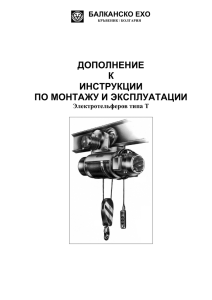
Пример диаграммы подобия показан на рис.4.
5. Проектирование динамических режимов шахтного подъема
Рассмотренные проектные рекомендации по рациональному выбору
динамических режимов шахтных подъемных установок ориентируются на
динамический режим базовой (модельной) подъемной установки.
Уравнения подобия рассмотрены как при равенстве массивностей
2 1 , т.е. при полном динамическом подобии подъемных установок, так и
при неравенстве массивностей 2 1 , т.е. при частичном (неполном)
подобии.
На основе уравнений подобия предложены методики проектирования
динамических режимов при постоянной и переменной высоте подъема в
условиях постоянной и переменной массивности установки, а также
рассмотрено проектирование подобных
и неподобных динамических
режимов в условиях постоянной подъемной установки.
18
Показан выбор динамического режима по заданной мощности
двигателя и пусковой перегрузке двигателя при реконструкции действующих
установок, когда вопросы реконструкции действующих установок возникают
либо при необходимости увеличения производительности установки, либо
при углублении ствола шахты.
Рис.4. Изолинии степени неполноты графика скорости
(множителя скорости) и относительного ускорения γ
в зависимости от времени и пусковой перегрузки λ
19
ЗАКЛЮЧЕНИЕ
В диссертации на базе выполненных исследований решена актуальная
задача выбора рациональных динамических режимов на основе проектных
рекомендаций в виде уравнений и диаграмм подобия режимов с целью
совершенствования конструкции шахтных подъемных установок.
Основные научные выводы и практические рекомендации заключаются
в следующем:
1. Показано, что проектные рекомендации по выбору рациональных
динамических режимов шахтных подъемных установок должны базироваться
как на размерных, так и безразмерных кинематических и динамических
параметрах (критериях подобия), характеризующих установку как единую
электромеханическую систему.
2. Установлено, что рационализация параметров шахтного подъема
возможна на основе проектных рекомендаций в виде уравнений и диаграмм
подобия по принятым критериям подобия, позволяющих производить
пересчет параметров базового динамического режима на проектируемый
режим.
3. Уточнен импульсный характер режимов работы шахтных подъемных
установок, зависящий от таких важных динамических параметров, как
импульс действующей силы, импульсное ускорение подъема, импульсный
коэффициент
массивности установки, относительная скорость подъема,
относительное время движения. Учет времени в уравнении импульса
движущей силы позволил правильно оценить относительные параметры
динамических режимов шахтного подъема.
4. Обоснованы кинематические, динамические и электродинамические
параметры
импульсных
режимов
статически
уравновешенного,
неуравновешенного и переуравновешенного подъема при различных формах
графиков скорости. Доказано, что трапецеидальный неравнобедренный
график скорости обеспечивает наилучшие результаты по максимальному
использованию скоростей и ускорений, по минимальным пусковым
20
перегрузкам двигателей, по частоте операций и производительности по
энергетическим
разработке
показателям
диаграмм
динамических
подобия
режимов,
(графический
метод
поэтому,
при
исследований)
трапецеидальный график скорости был принят в качестве основного.
Теоретически обоснована возможность применения двухпериодных
графиков скорости при аналитическом методе исследования по уравнениям
подобия.
5. Показано, что диаграммы подобия позволяют визуально оценивать и
выбирать из множества режимов заданный режим, а также выбирать
максимальные КПД установок при заданных энергетических затратах.
Формулы КПД показывают, что для наименьшего расхода энергии в
условиях статически уравновешенного подъема должны применяться
равнобедренные графики скорости, а для неуравновешенного подъема
необходимо применять неравнобедренные графики скорости с ускорением,
большим, чем замедление. Это позволит снизить потери энергии на нагрев
двигателя и торможение установки в процессе замедления.
6. Установлено, что уравнения подобия справедливы и точны для всех
электроприводов с повторно-кратковременными режимами работы, если при
проектировании
сохраняются
все
безразмерные
параметры
базовой
(модельной) установки. Уравнения подобия показывают, что самые разные
установки – вертикальные, наклонные и т.п. могут иметь динамически
подобные режимы и сами могут быть подобными, и, наоборот, однотипные
установки могут иметь неподобные динамические режимы.
7. Установлено, что частоте подъемных операций в условиях заданной
производительности соответствует безусловный минимум зквивалентного
усилия
подъема,
что
создает
широкие
возможности
для
выбора
рационального динамического режима.
8. Разработана динамическая классификация шахтных подъемных
установок на основе относительного времени движения и импульсного
21
коэффициента массивности установки, которые исчерпывающим образом
характеризуют динамику шахтного подъема.
10. Систематизированы задачи прикладной динамики шахтного
подъема путем объединения их по подобным эксплуатационным режимам на
основе диаграмм подобия, что позволит не только сократить расчеты
динамических режимов, но и получить достоверную оценку этих режимов
при проектировании нового оборудования и реконструкции действующих
установок.
Основные научные результаты диссертации опубликованы
в следующих работах
Статьи, опубликованные в ведущем рецензируемом научном
журнале, входящем в перечень ВАК
1. Двинина, Л. Б. Теоретическое определение импульсов усилий
шахтных подъемных установок / Л. Б. Двинина, С. А. Ляпцев // Изв. вузов.
Горный журнал. - 2006. - № 6. - С. 139…146.
Статьи, опубликованные в материалах конференций
2. Двинина, Л. Б. Применение методов статистической динамики при
оценке расчетных характеристик нагружения деталей шахтных подъемных
машин / Л. Б. Двинина // Математическое моделирование механических
явлений: материалы Всероссийской науч. - техн. конф. -
Екатеринбург:
УГГУ, 2004. - С. 16…18.
3. Двинина, Л. Б. Критерии подобия динамических режимов шахтного
подъема / Л. Б. Двинина, Л. А. Двинин, С. А. Ляпцев С. // Нетрадиционные
технологии и оборудование для разработки сложно - структурных
месторождений полезных ископаемых: материалы Второй междунар. науч. техн. конф., 15-17 февр. 2005, г. Екатеринбург.- Екатеринбург: УГГУ, 2005. С. 83…87.
22
4. Двинина, Л. Б. Типовые диаграммы подобия при расчете и анализе
переходных режимов шахтных подъемных установок / Л. Б. Двинина, Л. А.
Двинин, С. А. Ляпцев // Технологическое оборудование для горной и
нефтегазовой промышленности: материалы Четвертой междунар. науч. техн. конф. 15-17 мая 2006, г. Екатеринбург. - Екатеринбург: УГГУ, 2006. С.160…163.
5. Двинина, Л. Б. Уравнения подобия динамических режимов шахтного
подъема / Л. Б. Двинина, Л. А. Двинин, С. А. Ляпцев // Технологическое
оборудование для горной и нефтегазовой промышленности: материалы
Шестой междунар. науч. - техн. конф., 10-11 апреля 2008, г. Екатеринбург. Екатеринбург: УГГУ, 2008. - С. 264…267.
6. Двинина, Л. Б. Динамическая классификация подъемных установок /
Л. Б. Двинина, Л. А. Двинин С. А. Ляпцев // Технологическое оборудование
для горной и нефтегазовой промышленности: материалы Шестой междунар.
науч. - техн. конф., 10-11 апреля 2008, г. Екатеринбург. - Екатеринбург:
УГГУ, 2008. - С. 267…268.
7. Двинина Л. Б. Выбор динамического режима шахтных подъемных
установок по скорости подъема / Л. Б. Двинина, Л. А. Двинин С. А. Ляпцев //
Технологическое оборудование для горной и нефтегазовой промышленности:
материалы Шестой междунар. науч. - техн. конф. , 10-11 апреля 2008, г.
Екатеринбург. - Екатеринбург: УГГУ, 2008. - С. 268…274.
23
Подписано в печать 27.11.2008 г. Формат 60х841/16. Бумага офсетная.
Печать на ризографе. Печ. л. 1,0. Тираж 100 экз. Заказ №
Издательство УГГУ
Отпечатано с оригинал-макета в лаборатории множительной техники
издательства УГГУ
620144, г. Екатеринбург, ул. Куйбышева, 30
Уральский государственный горный университет