МЕТОДИЧЕСКИЕ УКАЗАНИЯ к домашнему заданию по курсу УТС “Исследование нелинейной системы автоматического регулирования“
advertisement

МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к домашнему заданию по курсу УТС
“Исследование нелинейной системы
автоматического регулирования“
ОПРЕДЕЛЕНИЕ ИСХОДНЫХ ДАННЫХ
Исходные данные для выполнения домашнего задания приведены в
приложениях 1 и 2. Таблица приложения 1 состоит из четырех разделов. Разделы I и II содержат константы, входящие в уравнения объекта регулирования и чувствительного элемента соответственно, раздел III содержит данные
по коэффициенту усиления серводвигателя и номер нелинейности. В таблицах приложения 2 приведены характеристики нелинейных элементов.
Номер варианта задания состоит из четырех цифр. Первые три цифры
показывают номера столбцов в разделах таблицы 1: первая цифра - в разделе
I, вторая - в разделе II, третья - в разделе III. Четвертая цифра показывает номер варианта (1 или 2) в таблице 2.
Цель задания - исследование нелинейной САР методом гармонической
линеаризации, определение параметров и устойчивости автоколебаний, построение переходного процесса.
ОПИСАНИЕ НЕЛИНЕЙНОЙ СИСТЕМЫ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
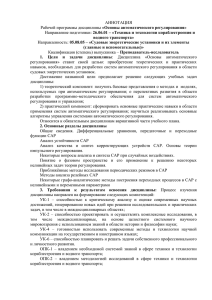
Объектом исследования в домашнем задании является система стабилизации физического параметра (давления, температуры и т.д.) теплоэнергетической установки. Функциональная схема нелинейной системы автоматического регулирования приведена на рис.1. Система состоит из объекта регулирования ОР, чувствительного элемента ЧЭ, серводвигателя (электрического, гидравлического, пневматического типа) СД и нелинейного элемента.
Первые три из перечисленных элементов САР рассматриваются как типовые
линейные звенья, описываемые следующими дифференциальными уравнениями (в относительных координатах):
- объект регулирования
Tо dy/dt + y = kо1 h + kо2 f ;
- чувствительный элемент
Tк dη/dt + η = - k1 y ;
- серводвигатель (без обратной связи)
dh/dt = kc U.
Здесь y - регулируемая величина; h - регулирующее воздействие; ϕ возмущающее воздействие; η - отклонение выходной координаты ЧЭ; Tо и Tк
- постоянные времени ОР и ЧЭ соответственно; kо1, kо2, k1, kс - коэффициенты
усиления по соответствующим воздействиям.
Рассматриваются характерные для теплоэнергетических установок режимы работы системы стабилизации при изменении внешнего возмущающего воздействия f и неизменной настройке g=0 (в относительных координатах). В этом случае ошибка регулирования ε равна отклонению выходной координаты чувствительного элемента η, поэтому принято ε=η.
При построении нелинейных моделей САР обычно учитывается лишь
наиболее сильно выраженная нелинейность, которую имеет нелинейный элемент (НЭ) с типовой статической характеристикой (приложение 2).
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1. Составление дифференциального уравнения и передаточной функции линейной части системы.
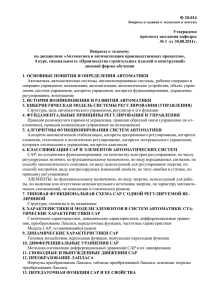
При исследовании автоколебаний в системе нелинейную САР необходимо представить в виде совокупности линейной части и нелинейного элемента (рис.2). Линейная часть (ЛЧ) цепи регулирования состоит из последовательно соединенных серводвигателя СД, объекта регулирования ОР и чувствительного элемента ЧЭ (рис.3).
Составление дифференциального уравнения и передаточной функции
Wл(p) линейной части цепи регулирования осуществляется либо решением
системы дифференциальных уравнений линейных звеньев, записанных в
операторной форме, либо по передаточным функциям звеньев. Дифференциальное уравнение линейной части цепи регулирования может быть записано
в общем виде следуюшим образом:
D(p) η + R(p) U = 0,
(1)
где D(p) - собственный оператор линейной части; R(p) - оператор входного
воздействия.
2. Составление гармонически линеаризованных уравнений нелинейного элемента и системы.
Из приближенных методов исследования нелинейных систем наибольшее распространение получил метод гармонической линеаризации, позволяющий определить амплитуду и частоту периодических режимов (автоколе-
баний). Так как анализируется периодический режим работы системы, рассматривается прохождение колебаний через нелинейный элемент.
При выводе гармонически линеаризованного уравнения нелинейного
элемента допускается, что при подаче на вход элемента гармонических колебаний вида η=ηо sin ωt на выходе элемента также имеем гармонические колебания вида U=Uо sin(ωt+ϕ) с той же частотой (тем же периодом T). В действительности колебания на выходе по форме могут существенно отличаться от
синусоидальных. Например, они могут быть ступенчатыми, как это показано
на рис.4 для нелинейности релейного типа. Однако, любой периодический
сигнал с помощью разложения в ряд Фурье может быть представлен в виде
суммы бесконечного множества гармонических составляющих (гармоник)
различной частоты, кратной частоте входного сигнала (рис.4). Предполагается, что линейная часть системы из-за своей инерционности обладает фильтрующими свойствами и амплитуды высших гармоник при прохождении через линейную часть уменьшаются во много раз. Поэтому высшими гармониками можно пренебречь, оставив лишь первую гармонику с частотой, равной
частоте входного сигнала. Указанное свойство автоматических систем и является физическим основанием для применения метода гармонической линеаризации.
Гармонически линеаризованное уравнение в операторной форме для
рассматриваемых типов нелинейностей может быть представлено в виде
z = {q(a) + [q1(a)/ω] p } η ,
(2)
где q(a) и q1(a) - коэффициенты гармонической линеаризации, выражения которых для каждой типовой нелинейности приведены в таблице 2. Особенность уравнения (2) в том, что коэффициенты q(a) и q1(a) в общем случае переходного процесса системы являются переменными в связи с изменением
амплитуды колебаний. Наиболее простой смысл имеет гармонически линеаризованное уравнение для идеальной релейной характеристики (рис.5.). Здесь
гармоническая линеаризация соответствует замене реального нелинейного
элемента некоторой прямой линией, проходящей через начало координат и
направленной под таким углом α, чтобы эта прямая приближенно заменяла
тот участок нелинейности, который охватывается колебаниями с данной амплитудой. Здесь коэффициент гармонической линеаризации q(a) соответствует тангенсу угла наклона указанной прямой.
Объединение уравнения (1) линейной части и гармонически линеаризованного уравнения (2) нелинейного элемента дает дифференциальное уравнение системы
{D(p) + R(p) {q(a) + [q1(a)/ω] p }} η = 0 ,
характеристическое уравнение которого имеет вид
(3)
D(p) + R(p) {q(a) + [q1(a)/ω] p } = 0,
(4)
где p - корень уравнения.
3. Определение параметров автоколебаний.
Параметры автоколебаний исследуемой системы определяются методом подстановки условия p=iω в характеристическое уравнение (4), которое
приобретает вид комплексного выражения
U(ω) + iV(ω) = 0
и сводится к двум уравнениям
U(ω) = 0 ;
(5)
V(ω) = 0 .
При решении системы уравнений (5) определяется амплитуда автоколебаний aп выходной координаты η чувствительного элемента. С учетом малой инерционности чувствительного элемента можно принять в первом приближении, что амплитуда автоколебаний выходной координаты САР aпу определяется следующим образом: aпу=aп / k1.
Способ решения системы уравнений (5) зависит от номера нелинейности (третья цифра варианта задания).
3.1. Типовые нелинейности 1,2,5,6,7.
Для перечисленных нелинейностей в уравнении гармонической линеаризации q1(a)=0, поэтому из второго уравнения системы (5) сразу определяется частота автоколебаний ωп. В вариантах задания, содержащих данные нелинейности, не задано значение коэффициента передачи серводвигателя kс.
При анализе автоколебаний представляет интерес влияние конструктивных
параметров САР на параметры автоколебаний. Постройте зависимость амплитуды автоколебаний выходной координаты САР aпу от коэффициента передачи СД kс. Диапазон изменения kс принять 0 - 10.
3.2. Типовые нелинейности 3,4,8.
Для вариантов задания с данными типами нелинейностей определите
частоту ωп и амплитуду aпу автоколебаний при заданном значении коэффициента передачи серводвигателя kс (таблица 1). При решении системы урав-
нений (5) можете использовать любые методы решения системы алгебраических уравнений. Предпочтительно применение стандартных программ для
ЭВМ. Возможно также использование одного из описанных ниже графических способов (подпункты 3.2.1 и 3.2.2).
3.2.1. Графический способ 1.
Из гармонически линеаризованного уравнения САР в операторной
форме (3) получаем связь передаточной функции линейной части цепи регулирования и оператора гармонически линеаризованного уравнения нелинейного элемента
W(p) = R(p) / D(p) = 1 /{q(a) + [q1(a)/ω] p }.
После подстановки p=iω в левой части данного уравнения получаем выражение амплитудно-фазовой частотной характеристики (АФЧХ) линейной части
цепи регулирования
Yл(iω) = 1 / [q(a) + i q1(a)] = [q(a) - iq1(a)] / [q2(a) + q12(a)].
(6)
В правой части уравнения (6) для разделения комплексного выражения на
действительную и мнимую части проведено домножение числителя и знаменателя дроби на комплексно сопряженное знаменателю выражение.
Решение уравнения (6) осуществляется графически. На комплексной
плоскости строятся годограф АФЧХ линейной части цепи регулирования
Wл(iω) как функция частоты колебаний ω и график правой части уравнения
(6) как функции амплитуды колебаний a (рис.6). В точке пересечения годографа Wл(iω) и графика правой части уравнения (6) параметры CАР соответствуют параметрам автоколебаний ω=ωп, a=aп.
3.2.2. Графический способ 2.
По формулам коэффициентов гармонической линеаризации, приведенным в таблице 2, строятся графики зависимостей q(a) и q1(a) (рис.7,а,б). Из
уравнений (5) записываются выражения для коэффициентов гармонической
линеаризации, правые части которых в качестве переменной содержат частоту колебаний - q=f(ω) и q1=f(ω). По этим зависимостям строятся графики
(рис.7,в,г), которые располагаются рядом с графиками q(a) и q1(a). По указанным графикам значения ωп и aп определяются методом приближений. Для
этого задается какое-либо значение q (линия 1 на рис.7,а,в) и проверяется соответствие значений q1 на рис.7,б,г. При несоответствии выбирается новое
значение q и т.д. до совпадения q1 на рис.7,б,г (линия 2). Соответствующие
значения a и ω являются решениями уравнений (5), т.е. параметрами авто-
колебаний aп и ωп. Отсутствие периодического решения (действительные положительные числа aп и ωп) системы уравнений (5) означает, что автоколебания в нелинейной САР не возникают.
4. Оценка устойчивости автоколебаний.
Автоколебания в нелинейной САР возникнут только в том случае, если
периодическое решение системы уравнений (5) будет устойчивым. Оценка
устойчивости автоколебаний проводится путем задания некоторого приращения Δa к амплитуде aп автоколебаний. При наличии устойчивых автоколебаний в САР внесение такого возмущения должно с течением времени приводить к восстановлению исходной амплитуды aп. Устойчивые автоколебания характеризуются сходящимся к aп процессом при Δa>0 (рис.8,а) и расходящимся до aп при Δa<0 (рис.8,б). При неустойчивых автоколебаниях наоборот - при Δa>0 процесс расходится от aп (рис.8,в), при Δa<0 - сходится от aп к
нулю (рис.8,г).
Для анализа устойчивости автоколебаний удобно использовать критерий устойчивости Михайлова, применяемый для линеаризованных уравнений
САР. Выражение для вектора Михайлова получается из характеристического
уравнения подстановкой чисто мнимого корня p=iω. При периодическом
решении годограф Михайлова проходит через начало координат комплексной плоскости U(ω) - iV(ω) (рис.9). Для исследования устойчивости периодического решения дают малое приращение (положительное или отрицательное) Δa амплитуде и строят годограф Михайлова для этого измененного
значения амплитуды a=aп+Δa.
Согласно критерию Михайлова, если новый годограф займет положение 1 (рис.9) при Δa>0 и положение 2 при Δa<0, то переходные процессы в
системе будут такими, что колебания с амплитудой, большей aп, затухают, а
колебания с амплитудой, меньшей aп, расходятся (система неустойчива в малом и устойчива в большом). Следовательно, переходные процессы с обеих
сторон сходятся к исследуемому периодическому процессу с амплитудой aп.
Это означает его устойчивость, т.е. в САР имеют место автоколебания. Если
же при Δa>0 получится кривая 2, а при Δa<0 - кривая 1, то переходные процессы в обе стороны расходятся от периодического решения с амплитудой aп
и оно неустойчиво (система устойчива в малом и неустойчива в большом),
автоколебания не возникнут.
Для САР, описываемых уравнениями 3,4 порядков, можно не строить
годограф Михайлова, а определить его смещение в ту или иную сторону аналитически. Для этого надо определить, куда будет смещаться точка годографа Михайлова, лежащая в начале координат (рис.10). Если при Δa>0 точка 0
будет перемещаться в направлении А1, то периодическое решение устойчиво,
если в направлении А2 - неустойчиво. Направление перемещения точки 0 определяется проекциями (∂U/∂a)п и (∂V/∂a)п, где U и V - вещественная и мни-
мая части выражения вектора Михайлова, а индекс “п” означает подстановку
в выражения производных значений a=aп и ω=ωп.
Как видно из рис.10, для устойчивости периодического решения вектор
с проекциями (∂U/∂a)п, (∂V/∂a)п, показывающий смещение точки годографа в
начале координат, должен лежать с определенной стороны от касательной
MN к годографу Михайлова в этой точке, направление которой, в свою очередь, определяется проекциями (∂U/∂ω)п и (∂V/∂ω)п. Из расположения вектора движения точки 0 по отношению к вектору касательной MN (рис.10) видна
устойчивость или неустойчивость периодического решения. Взаимное расположение вектора и касательной определяется знаком выражения
(7)
(∂U/∂a)п (∂V/∂ω)п - (∂U/∂ω)п (∂V/∂a)п .
Для устойчивости автоколебаний необходимо, чтобы вектор движения
точки 0 с проекциями (∂U/∂a)п и (∂V/∂a)п лежал справа от касательной MN,
если смотреть вдоль годографа Михайлова в сторону возрастания ω. В этом
случае выражение (7) положительно. Если выражение (7) отрицательно, то
автоколебания неустойчивы.
Определите устойчивость автоколебаний либо графически путем построения годографа Михайлова, либо аналитически по знаку выражения (7).
Вещественная U(ω) и мнимая V(ω) части вектора Михайлова соответствуют
выражениям U(ω) и V(ω) из системы уравнений (5). Для вариантов задания, в
которых не задано значение коэффициента передачи серводвигателя, принять
kс=5 и взять значение aпу с построенного графика зависимости aпу(kс).
Если используется графический вариант критерия Михайлова, постройте годографы, соответствующие aп и aп+Δa в области начала координат
комплексной плоскости. Величину отклонения амплитуды принять Δa=0,1 aп
(положительное или отрицательное значение).
При аналитическом методе оценки устойчивости по знаку выражения
(7) после получения выражений производных определите их числовые значения для конкретных значений параметров автоколебаний.
5. Построение переходного процесса в нелинейной САР.
Для построения переходного процесса в нелинейной САР используется
универсальная программа расчета динамических характеристик САР на
ЭВМ – МВТУ Перед расчетом переходного процесса составьте структурную
схему нелинейной САР и соответствующую схему моделирования. Необходимые нелинейные характеристики есть в таблице типовых блоков МВТУ.
При построении переходного процесса используется единичное ступенчатое
внешнее возмущающее воздействие на ОР. Для типовых нелинейностей,
имеющих зону нечувствительности, единичное воздействие может оказаться
недостаточным для функционирования всей цепи регулирования. В этом
случае используйте уровень ступенчатого воздействия, равный 10 относи-
тельным единицам. Для вариантов задания, в которых не задано значение коэффициента передачи серводвигателя, принять kс=5. Время расчета переходного процесса выбирается из условия установления в САР автоколебаний
(если они возникают).
После расчета зарисуйте график переходного процесса изменения выходной координаты системы. По переходному процессу подтверждается наличие в нелинейной САР автоколебаний и проводится сопоставление их параметров (амплитуды и частоты) со значениями aп и ωп, полученными методом гармонической линеаризации.
Рис. 1. Функциональная схема нелинейной САР
Рис. 2. Функциональная схема
нелинейной САР с линейной частью и
нелинейным элементом
Рис. 3. Функциональная схема линейной части нелинейной САР
Рис. 4. Изменение выходной величины нелинейного элемента
релейного типа при подаче на его вход синусоидального сигнала
Рис. 5. К пояснению смысла гармонической линеаризации
идеальной релейной характеристики
Рис. 6. К пояснению первого графического способа
определения амплитуды и частоты автоколебаний
Рис. 7. К пояснению второго графического способа
определения амплитуды и частоты автоколебаний
Рис. 8. Переходные процессы в нелинейной САР при возникновении
устойчивых (а, б) и неустойчивых (в, г) автоколебаний
Рис. 9. Годограф Михайлова для
различных значений амплитуды
автоколебаний
Рис. 10. Смещение годографа Михайлова для устойчивых
и неустойчивых автоколебаний
Приложение 1
Номер
раздела
I
II
III
Параметр
KO
TO, c
K1
TK, с
KC, c-1
Номер НЭ
1
0.5
1
1.0
0.10
1
2
0.5
5
1.0
0.12
2
Номер варианта
3
4
5
1.0
1.0
1.5
10
15
20
1.2
1.2
1.4
0.14
0.16
0.18
5
5
3
4
5
6
1.5
25
1.4
0.20
6
7
2.0
30
1.6
0.22
7
8
2.0
35
1.6
0.24
5
8