ФГБОУ ВПО «ГОСУДАРСТВЕННЫЙ АГРАРНЫЙ УНИВЕРСИТЕТ СЕВЕРНОГО ЗАУРАЛЬЯ» Кафедра лесного хозяйства,
advertisement

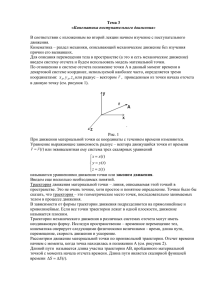
Министерство сельского хозяйства Российской Федерации ФГБОУ ВПО «ГОСУДАРСТВЕННЫЙ АГРАРНЫЙ УНИВЕРСИТЕТ СЕВЕРНОГО ЗАУРАЛЬЯ» МЕХАНИКО-ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ Кафедра лесного хозяйства, деревообработки и прикладной механики РАСЧЕТНО-ГРАФИЧЕСКАЯ РАБОТА по дисциплине прикладная механика Вариант 27 Студент: Протасов Алексей Леонидович Группа: Б-ЭЭ32 Руководитель проекта: Пяльченков Владимир Алексеевич Тюмень, 2014 Задание 1) По заданным размерам построить кинематическую схему механизма в расчетном положении, которое определяется углом φ. Угол φ откладывается в направлении угловой скорости ω1 от оси О-О. 2) Определить скорости точек А, В и С. Для этого построить план скоростей. 3) Определить угловую скорость звена 2 ω2 . Указать на схеме направление ω2 круговой стрелкой. 4) Определить ускорения точек A, B, C, S1, S2. Для этого построить план ускорений. Точки S1, S2 – центры масс звеньев. Находятся на серединах полных длин соответствующих звеньев. 5) Определить угловое ускорение звена 2 ε2. Указать на схеме направление ε2 круговой стрелкой. РГР 05-03 ТММ Изм. Лист № докум. Разраб. Протасов А.Л. Провер. Пяльченков Реценз. Н. Контр. Утверд. Подпись Дата Лит. Расчетно-графическая работа Лист Листов 2 5 гр. Б-ЭЭ 32 Дано: угловая скорость кривошипа является постоянной и равна ω1=30 с-1, е=26 мм, ОА = 30 мм, АВ = 90 мм, AС = 38 мм, AS2=26 мм, φ=45°, m1=0,8ОА кг, m2=0,8ВС кг, m3=2m2 кг. 1. Определение скоростей точек звеньев и угловых скоростей звеньев для заданного положения механизма. 1.1. Определение скорости точки А. VA = ω1 ∙ OA = 30 ∙ 0.03 = 0.9 м/с Вектор скорости VA перпендикулярен кривошипу ОА. Выбираем масштаб плана скоростей μV = 0,01 м/с мм Найдём отрезок, изображающий вектор скорости VA на плане: VA 0.9 РV a = = = 90мм μV 0.01 Из полюса плана скоростей PV откладываем данный отрезок в направлении, перпендикулярном ОА в направлении угловой скорости 1 . 1.2. Определение скорости точки В. Запишем векторное уравнение: VB VA VBA . Направления векторов скоростей: VB ||X − X, VBA BA . Продолжим строить план скоростей. Из конца вектора VA (точка a) проводим направление вектора VBA . Из полюса (точка PV) проводим направление вектора VB . На пересечении двух проведённых направлений получим точку b. Измеряя длины полученных отрезков и умножая их на масштаб V , получим значения скоростей: VB = PV b ∙ μV = 94 ∙ 0.01 = 0.94 м/с VBA = ab ∙ μV = 98 ∙ 0.01 = 0.98 м/с 1.3. Определение скорости точки С. Воспользуемся следствием из теоремы подобия. Составим пропорцию: AB ab , AC ac ab ∙ AC 99 ∙ 36 ac = = = 39.6 мм AB 90 Данный отрезок откладываем на продолжении отрезка ab. Точку c соединяем с полюсом PV. Величина скорости точки С: VC = PV c ∙ μV = 129 ∙ 0.01 Лист РГР 05-03 ТММ АВ. 1.4. Определение угловой скорости шатуна 2 Изм. Лист № докум. Подпись Дата ω2 = VBA 0.98 = = 10.8 c −1 AB 0.09 Для определения направления 2 переносим вектор VBA в точку В шатуна АВ и смотрим как она движется относительно точки А. Направление этого движения соответствует 2 . В данном случае угловая скорость 2 направлена против часовой стрелки. Таблица 1 Значение Величина Масштабный Отрезок скорости, Скорость Направление отрезка на коэффициент на плане м/с плане, мм μV VA PV a VA OA 103 VB VBA VC PV b VB ||X − X 94 ab VBA BA 99 2 PV c 1,024 𝜇𝑉 = 0,01 м 0,94 мм 0,98 129 1,29 1 10,8 c Против часовой стрелки 2. Определение ускорений точек звеньев и угловых ускорений звеньев для заданного положения механизма. 2.1. Определение ускорения точки А. Так как угловая скорость 1 является постоянной, то a A a An . aA = ω12 ∙ OA = 322 ∙ 0.032 = 33 м/с2 Вектор ускорения aA направлен параллельно кривошипу ОА от точки А к точке О. Выбираем масштаб плана ускорений μa = 0.3 м/с2 мм . Найдём отрезок, изображающий вектор ускорения aA на плане: aA 33 Pa a = = = 110 мм μa 0.3 Из полюса плана ускорений Pa откладываем данный отрезок в направлении, параллельном АО. 2.2. Определение ускорения точки В. Запишем векторное уравнение: aB aA aBA . Вектор относительного ускорения aBA раскладываем на нормальную и n aBA . касательную составляющие: aBA aBA Нормальное относительное ускорение равно: n aBA = ω22 ∙ AB = 10.82 ∙ 0.09 = 10.5 м/с2 n Найдём отрезок, изображающий вектор ускорения aBA на плане: n aBA 10.5 an = = = 35 мм μa 0.3 РГР 05-03 ТММ Изм. Лист № докум. Подпись Дата Лист 3 n Продолжаем строить план ускорений. Вектор ускорения aBA направлен параллельно АВ. Откладываем отрезок an из точки a плана ускорений в указанном направлении от точки В к точке А. Вектор ускорения aBA направлен перпендикулярно АВ. Проводим это направление из точки n плана ускорений. Вектор ускорения aB направлен параллельно оси x–x. Проводим это направление из полюса Pa. Две прямые линии, проведённые из точек n и Pa в указанных направлениях, пересекаются в точке b. Найдем величины ускорений. Измеряя длины полученных отрезков и умножая их на масштаб a , получим: aB = Pa b ∙ μa = 103 ∙ 0.3 = 30.9 м/с2 aτBA = nb ∙ μa = 38 ∙ 0.3 = 11.4 м/с2 aBA = ab ∙ μa = 52 ∙ 0.3 = 15.6 м/с2 2.3. Определение ускорения точки С. Воспользуемся следствием из теоремы подобия. Составим пропорцию: AB ab , AC ac ab ∙ AC 52 ∙ 36 ac = = = 20 мм AB 90 Данный отрезок откладываем на продолжении отрезка ab. Точку c соединяем с полюсом Pa Величина ускорения точки С: aC = Pa c ∙ μa = 111 ∙ 0.3 = 33.3 м/с2 2.4. Определение ускорения точки S1. Воспользуемся следствием из теоремы подобия. Составим пропорцию: OA P a P a∙AS 101∙16 = a , as1 = a 1 = = 50.5 мм a S1 AS1 as1 AS2 as2 OA 32 Данный отрезок откладываем на прямой Paa от точки a. Величина ускорения: = Pa s1 ∙ μa = 51 ∙ 0.3 = 15.3 м/с2 2.5. Определение ускорения точки S2. Воспользуемся следствием из теоремы подобия. Составим пропорцию: AB ab ab∙AS2 52∙27 = , as2 = = = 15.6 мм AB 90 Данный отрезок откладываем на прямой ab от точки a. Точку s2 соединяем с полюсом Pa. Величина ускорения: aS2 = Pa s2 ∙ μa = 99 ∙ 0.3 = 29.7 м/с2 2.6. Определение углового ускорения шатуна АВ. τ aBA 11.4 ε2 = = = 126.6 с−2 AB 0.09 Для определения направления 2 переносим вектор aBA в точку В шатуна АВ и смотрим как она движется относительно точки А. Направление этого движения соответствует 2 . В данном случае угловое ускорение 2 Лист РГР 05-03 ТММ 4 Изм. Лист № докум. Подпись Дата направлено против часовой стрелки. Ускорение aA aB aC n aBA aBA aBA aS1 aS 2 Отрезок Направление Длина Масштабный на плане отрезка на коэффициент плане, мм a 110 aA || AO ⃗⃗⃗⃗ Pa a 103 aB || X - X ⃗⃗⃗⃗ Pa b 111 Pa c 35 ⃗⃗⃗⃗⃗⃗ an anBA || AB м/с2 38 ⃗⃗⃗⃗⃗⃗ nb aτBA ⊥ AB 0.3 мм 52 ab Pa s1 Pa s2 2 51 99 29,7 2 126,6 c По часовой стрелки № докум. Подпись Дата 11,4 15,6 15,3 РГР 05-03 ТММ Изм. Лист Таблица 2 Значение ускорения м/с2 33 30,9 33,3 10,5 Лист 5