и эксплуатации адаптивных асу
advertisement

ПРЕДМЕТ ТЕОРИИ УПРАВЛЕНИЯ
Управление в широком смысле представляет собой воздействие на эволюцию
(развитие во времени) того или иного процесса с целью придания ему желаемых свойств.
При этом процесс может относиться к различным явлениям окружающего мира и
областям человеческой деятельности (загрязнение Мирового океана, освоение
космического пространства, социально-экономическая жизнь государств и коллективов
людей, дипломатия и военное дело, технология и наука, создание и использование
различных технических устройств и их комплексов, жизнедеятельность конкретного
организма и т.д.).
Направленные воздействия осуществляет управляющая система, в качестве
которой могут выступать человек, естественный или искусственный орган (устройство) и
др. Подчеркнем, что в любом случае определение или интерпретация цели управления
(желаемых свойств управляемого процесса) являются прерогативой человека или
коллектива людей. Так, с научной точки зрения явления природы не являются
целенаправленными, хотя очень многие вкладывают прямой смысл в утверждение: "Мир
устроен целесообразно".
С задачей управления непосредственно связан вопрос: чем и зачем управлять? При
соответствующем уточнении создается предпосылка решения задачи управления, что
связано с ответом на вопрос: как управлять? Исследование этого вопроса составляет
основное содержание теории управления.
В сложившейся математической теории управления первый вопрос является
внешним: обычно предполагаются известными математическая модель процесса и
необходимые сведения о состояниях модели в те или иные моменты времени, так что
ясно, чем надо управлять. Кроме того, цель управления формализована (указана в
подходящих терминах), а потому понятно, зачем надо управлять. Хотя в рамках теории
управления рассматриваются разнообразные модели управляемых объектов и ставятся
различные цели управления, вопрос об их адекватности реальным процессам и
неформальным целям управления не ставится. Такой подход к теории управления
позволяет широко использовать математические методы исследования. Практическая
значимость полученных результатов зависит от содержательности принятых моделей
управляемых процессов и целей управления.
Наибольшее развитие теория получила при исследовании процесса управления
моделями, описывающими движение относительно простых физических и механических
систем. Математические методы исследования проблемы управления лишь начинают
пробивать дорогу при изучении моделей окружающей среды, экономических и
социологических моделей, при описании сложных явлений в биологии, медицине и т.п.
Исходными являются понятия объект управления, цель управления, стратегия
управления. Объект управления (ОУ) характеризуется наличием входного процесса
(набором управляющих и возмущающих воздействий), выходного процесса
(управляемого процесса или выхода ОУ) и связями между входными и выходными
процессами. Теоретики часто отождествляют ОУ с оператором, отображающим заданное
множество входных процессов в множество выходных процессов. Это входо-выходное
отображение может иметь сложную функциональную форму, но обязано удовлетворять
условию причинности: значение выходного процесса в каждый момент времени не
должно зависеть от будущих значений входного процесса. Формализованное описание
входо-выходного отображения называют также математической моделью управляемого
процесса (управляемого объекта). Изменение входного управляющего процесса влечет
изменение выходного процесса. Решение задачи управления состоит в требовании указать
способ изменения во времени входного управляющего процесса, при котором выходной
процесс обладал бы предписанными свойствами (то есть обеспечивал бы поставленные
цели управления). Этот способ называют стратегией управления (СУ). Стратегия должна
быть допустимой, то есть использовать лишь те данные об ОУ, которые доступны в
соответствующий момент времени (эти данные могут изменяться, например, в результате
обновления информации в процессе управления), и обеспечивать выполнение некоторых
общих условий протекания процесса управления. (Важным из таких условий является
обеспечение устойчивости системы управления, это свойство означает, что для любого
ограниченного во времени входного процесса соответствующий выходной процесс также
должен быть ограничен во времени. В некоторых приложениях требование устойчивости
системы управления может выступать в качестве цели управления.) Задача управления
предполагает задание класса допустимых стратегий, и ее решение состоит в выборе из
этого класса стратегии, обеспечивающей выполнение ЦУ.
ПОНЯТИЕ ОБ АДАПТИВНОМ УПРАВЛЕНИИ
В инженерной практике обычно стремятся построить возможно более простую
модель управляемого процесса (которая тем не менее должна отражать основные его
свойства). Наличие простых моделей позволяет, в частности, более полно изучить процесс
управления путем имитации его с помощью аналоговых либо цифровых вычислительных
машин и в итоге выбрать наиболее подходящий режим работы системы управления.
Для современного производства характерны усложнение технологических
процессов, ужесточение допустимых отклонений управляемого процесса от
предписанных значений и т.д. Совершенствование методов управления в этих условиях
предполагает разработку более сложных математических моделей управляемых
процессов, позволяющих оптимизировать управление, а использование усложненных
моделей порождает проблему задания значений характеристик и параметров модели,
нужных для формирования требуемого управления. Более того, некоторые из таких
параметров могут дрейфовать во времени вследствие износа или старения тех или иных
устройств и механизмов, составляющих ОУ. Иногда можно учитывать подобный дрейф
параметров путем регулярной замены изношенных деталей либо путем переналадки
управляющей системы, но обычно это требует прерывания технологического процесса и
потому может оказаться экономически невыгодным либо даже невозможным по
производственным причинам. Широкое внедрение современных ЭВМ в процессы
управления технологическими процессами позволяет контролировать изменение
параметров без прерывания технологического процесса и использовать текущие значения
параметров (либо их оценки) для формирования управляющих воздействий. Если
параметры изменяются во времени достаточно медленно (что бывает во многих
прикладных задачах управления), то такие методы управления могут оказаться весьма
эффективными, поскольку не связаны с прерыванием технологического процесса для
тестирования управляемого процесса или ОУ.
Адаптивное управление — совокупность методов теории управления,
позволяющих синтезировать системы управления, которые имеют возможность изменять
параметры регулятора или структуру регулятора в зависимости от изменения параметров
объекта управления или внешних возмущений, действующих на объект управления.
Подобные системы управления называются адаптивными. Адаптивное управление
широко используется во многих приложениях теории управления.
Классификация адаптивных систем
По характеру изменений в управляющем устройстве адаптивные системы делят на
две большие группы:
самонастраивающиеся (изменяются только значения параметров регулятора)
самоорганизующиеся (изменяется структура самого регулятора).
По способу изучения объекта системы делятся на
поисковые
беспоисковые.
В первой группе особенно известны экстремальные системы, целью управления
которых является поддержание системы в точке экстремума статических характеристик
объекта. В таких системах для определения управляющих воздействий, обеспечивающих
движение к экстремуму, к управляющему сигналу добавляется поисковый сигнал.
Беспоисковые адаптивные системы управления по способу получения информации для
подстройки параметров регулятора делятся на
системы с эталонной моделью (ЭМ)
системы с идентификатором, в литературе иногда называют, как системы с
настраиваемой моделью (НМ).
Адаптивные системы с ЭМ содержат динамическую модель системы, обладающую
требуемым качеством. Адаптивные системы с идентификатором делятся по способу
управления на
прямой
косвенный(непрямой).
При косвенном адаптивном управлении сначала делается оценка параметров
объекта, после чего на основании полученных оценок определяются требуемые значения
параметров регулятора и производится их подстройка. При прямом адаптивном
управлении благодаря учёту взаимосвязи параметров объекта и регулятора производится
непосредственная оценка и подстройка параметров регулятора, чем исключается этап
идентификации параметров объекта. По способу достижения эффекта самонастройки
системы с моделью делятся на
системы с сигнальной (пассивной)
системы с параметрической (активной) адаптацией.
В системах с сигнальной адаптацией эффект самонастройки достигается без
изменения параметров управляющего устройства с помощью компенсирующих сигналов.
Системы, сочетающие в себе оба вида адаптации называют
комбинированными.
Самонастраивающаяся
система
автоматического
управления,
самоприспосабливающаяся система, в которой приспособление к случайно
изменяющимся условиям обеспечивается автоматическим изменением параметров
настройки или путём автоматического поиска оптимальной настройки. В любой
несамонастраивающейся автоматической системе управления имеются параметры,
которые влияют на устойчивость и качество процессов управления и могут быть
изменены при регулировке (настройке) системы. Если эти параметры остаются
неизменными, а условия функционирования (характеристики управляемого объекта,
возмущающие воздействия) существенно изменяются, то процесс управления может
ухудшиться или даже стать неустойчивым. Ручная настройка системы часто оказывается
обременительной, а иногда и невозможной. Использование в таких случаях
Самонастраивающаяся система технически и экономически целесообразно и даже может
оказаться
единственным
способом
надёжного
управления.
Самонастраивающаяся система подразделяют на поисковые и беспоисковые. В
поисковых Самонастраивающаяся система необходимое качество управления достигается
в результате автоматического поиска оптимальной (в некотором смысле) настройки.
Качество настройки характеризуется некоторым обобщённым показателем, связанным с
первичными параметрами настройки сложным, обычно не вполне стабильным и
недостаточно известным соотношением. Этот показатель измеряется непосредственно или
вычисляется по измеренным значениям первичных параметров. Параметрам настройки
придаются поисковые или пробные изменения. Анализ колебаний показателя качества
настройки, вызванных поисковыми воздействиями, позволяет установить, является ли
настройка оптимальной, т. е. соответствующей экстремуму (максимуму или минимуму)
показателя качества. Если имеют место отклонения от экстремума, то настройка
изменяется до тех пор, пока не приблизится к оптимальной. Поисковые системы могут
работать
при
изменении
внешних
условий
в
широких
пределах.
Беспоисковые системы имеют перед поисковыми системами определённое
преимущество, обусловленное тем, что поиск оптимального состояния отнимает
значительное время, т. е. время самонастройки поисковых систем ограничено снизу. В
беспоисковых систем используется некоторый контролируемый показатель качества
управления (например, значение производной контролируемого параметра по времени).
Автоматической настройкой параметров этот показатель поддерживается в заданных
пределах. В зависимости от вида показателя различают Самонастраивающаяся система с
контролем переходных процессов, с контролем частотных характеристик, с эталонной
моделью и др. Всё это - замкнутые беспоисковые системы с замкнутым контуром
самонастройки, в котором параметры настройки автоматически изменяются при выходе
показателя качества за допустимые пределы. Некоторые замкнутые беспоисковые
системы близки к обычным нелинейным системам автоматического управления с
пониженной чувствительностью к характеристикам объекта - к таким, например, как
релейные системы или управления системы с переменной структурой. Наряду с
замкнутыми применяют также разомкнутые системы - т. н. системы параметрической
компенсации. В этих системах контролируются воздействия, вызывающие изменение
свойств объекта, и по заранее рассчитанной программе изменяются параметры настройки
системы; контур самонастройки в этом случае разомкнут. Такая самонастройка может
быть почти мгновенной, однако её осуществление требует контроля окружающей среды и
достаточно точного знания законов воздействия среды на управляемый объект.
Самонастройка реализуется как специальной аппаратурой (в виде блоков самонастройки
или самонастраивающихся экстремальных регуляторов), так и адаптивными алгоритмами
центральных управляющих ЦВМ. Придание алгоритмам управления свойств
самонастройки (адаптации) существенно расширяет возможности управления
разнообразными процессами. Внедрение Самонастраивающаяся система позволяет
приблизиться к оптимальным режимам функционирования объектов, облегчает задачу
унификации систем управления, сокращает время на испытания и наладку, снижает
технологические требования на изготовление ряда узлов устройств управления,
освобождает обслуживающий персонал от трудоёмких операций настройки. Практическое
использование самонастраивающихся систем и самонастраивающихся алгоритмов - одна
из характерных черт технического прогресса в области управления.
Задачи синтеза адаптивных систем управления
Создание и совершенствование систем автоматического управления (САУ)
является одной из важных проблем, решение которой во многом определяет уровень
развития науки и техники. Поэтому задача создания качественно новых САУ,
обеспечивающих высокую точность управления и адаптации является актуальной. С
ужесточением условий эксплуатации систем управления выдвигаются дополнительные
требования к их качественным показателям.
В этих условиях при заданных ограничениях становится необходимым построение
оптимальных САУ, обеспечивающих минимальную погрешность при наличии
переменных во времени влияющих воздействий. При этом входное и влияющие
воздействия являются случайными функциями времени. Решение задачи оптимизации
(синтеза) измерительной системы позволяет найти оптимальное управление качеством
системы уже на стадии ее проектирования.
Задача синтеза. Задача синтеза системы автоматического управления (САУ)
рассматривается как задача определения структуры и параметров модели системы,
обеспечивающей оптимум заранее выбранного критерия качества при наличии влияющих
воздействий и заданных ограничениях.
В качестве САУ принята система, состоящая из датчиков, фиксирующих режим
работы плазмотрона и устройства обработки, реализующие операции согласования и
восстановления сигналов. На рис. 1 представлена обобщенная структурнофункциональная схема (модель) преобразования сигналов в САУ. Отдельные звенья
преобразования представляют собой функциональные устройства, которые могут быть
выполнены в виде отдельных технических устройств или объединены в некоторые
технические устройства. Последовательность звеньев в модели преобразования сигналов
фиксирована, причем в реальных САУ отдельные преобразования могут отсутствовать. В
целом САУ представляет собой иерархическую систему, нижнему уровню которой
соответствуют отдельные элементарные субсистемы преобразования, которые на
следующем уровне объединяются в указанные на рис. 1 звенья системы.
Согласно приведенной схеме на вход САУ поступают физические величины
,
которая преобразуется датчиком в электрический сигнал
, поступающий затем на
устройство обработки сигнала. В устройстве обработки реализуются последовательно
операции согласования сигналов и восстановления (определения оптимальных оценок
входной величины) сигнала на входе САУ. Реализация процесса нахождения
оптимальных оценок входной величины
может осуществляться, например, в
устройствах адаптивной коррекции, в состав которых входят звенья идентификации
моделей датчиков, либо самонастраивающиеся модели. Реализация процессов
согласования сигналов осуществляется в согласующих устройствах, в состав которых
могут входить усилители, фильтры, различного рода преобразователи – аналогоцифровые, цифро-аналоговые и т.д.
Большое внимание при синтезе любой САУ уделяется выбору решений, которые во
многом определяют качество синтезируемой системы. Причем при решении задачи
синтеза многозвенных систем, к которым относятся САУ, их конечное состояние является
результатом отдельных решений, принятых поэтапно для каждого звена (субсистемы).
Решение задачи синтеза целиком зависит от корректности постановки задачи – от
полноты тезауруса, включающего в себя класс моделей САУ, модели исследуемого
процесса и влияющих величин, критерий оптимальности и функции ограничений.
Некорректно поставленная задача, неправильно выбранное решение уже на стадии
математического моделирования могут привести к значительной погрешности САУ.
Поэтому перед выбором решения должен быть проведен анализ вопросов, уточняющих
постановку задачи. В результате должны быть определены:
модель исследуемого входного процесса либо его вероятностных характеристик;
класс моделей, в котором ищется оптимальная модель САУ;
модели влияющих величин либо их вероятностных характеристик;
критерий оптимальности;
функции ограничений.
Модель входного процесса. При построении оптимальной модели САУ
необходимо точное знание структуры и параметров входного воздействия, его
математической модели, что в большинстве случаев является практически неразрешимой
задачей. Поэтому при синтезе САУ обычно пользуются приближенными описаниями
математической модели входного воздействия, полученными на основании теоретических
данных, либо экспериментальных исследований по косвенным параметрам. Очевидно, что
приближенная модель не охватывает всего многообразия исследуемого процесса. Степень
приближения принятой модели у реальной во многом определяет качество
воспроизведения исследуемого процесса синтезируемой САУ. К тому же техническое
воплощение систем, обеспечивающий бесконечную совокупность реализаций, либо
бесконечную длительность одной реализации, принципиально не представляется
возможным. Современные технические средства позволяют воспроизводить реализацию
исследуемого процесса лишь в ограниченной области его изменения. Поэтому условия
для точного измерения параметров процесса принципиально никогда не могут быть
реализованы на практике. Однако при проведении целого ряда исследований
практический интерес представляет не весь процесс, а лишь его ограниченный участок.
Причем в зависимости от характера решаемых при исследовании задач одному и тому же
процессу могут быть приписаны различные математические модели. Принятая модель
процесса в основном и определяет задачу синтеза оптимальной САУ.
Класс моделей. Принадлежность САУ к тому или иному классу определяется
совокупностью признаков, характерных для данного класса. Совокупность признаков
САУ, в свою очередь, обусловлена характерными признаками отдельных ее субсистем,
либо одной определяющей субсистемы. При проведении поэтапной (поэлементной)
оптимизации системы в зависимости от функции цели могут использоваться как полные,
так и неполные рабочие модели. Последние, в свою очередь, могут отличаться от полных
моделей как по структуре, так и по составу параметров. В этом случае необходимо, чтобы
они были адекватны полным моделям по основным признакам, определяемым функциями
цели. При этом выполнение требования адекватности влечет за собой выполнение
условий, требующих реализации дополнительных условий в измерительной и
управляющей процедурах САУ.
Критерий оптимальности. Критерий оптимальности характеризует цель, которую
должна достичь синтезируемая САУ по своим определяющим показателям качества при
заданных ограничениях.
Критерий должен по возможности полно и точно характеризовать качество
системы. Выбирая критерий приходится решать задачу на оптимум, учитывая два
противоречивых фактора: сложность критерия, полноту и точность отображения
критерием назначения системы. Чем полнее и точнее критерий отображает систему, тем
он сложнее. Найти математическую зависимость всех качеств системы от ее
характеристик и объединить их в одном критерии обычно не удается. Поэтому в каждом
конкретном случае проводится анализ основных показателей качества и выделяется
главное качество системы, которое и используется как критерий.
Основными показателями качества для САУ являются точность, надежность,
устойчивость, удобство эксплуатации, габаритные размеры, электропотребление и т.д.
Когда предъявляются высокие требования к достоверности отработки управления,
определяющим показателем качества является точность. Она служит функцией цели при
синтезе САУ. Остальные показатели и, в первую очередь, такой, как надежность,
являются ограничивающими. В этом случае основная задача синтеза САУ состоит в
реализации оптимальной точности и выполнении условий физической реализуемости,
достаточной надежности, допустимых габаритных размеров, массы и т.д. Превышение
величины оптимальной точности может привести к резкому снижению остальных
качественных показателей и в результате – к непригодности САУ для работы в реальных
условиях.
Надежность в работе рассматривается как свойство системы безотказно выполнять
свои функции при сохранении точности в допустимых пределах. Она обусловлена как
эксплуатационной надежностью, оцениваемой безотказностью конструкции и схемы
САУ, так и метрологической, при которой метрологические характеристики, в частности
динамическая точность, сохраняются в допустимых пределах при работе в определенных
условиях эксплуатации и заданной продолжительности. Так как надежность САУ зависит
от надежности всех входящих в систему элементов, то при ее проектировании большое
внимание должно уделяться количественному и качественному выбору всех элементов
системы с точки зрения надежности. Для повышения надежности САУ при ее разработке
должны быть предусмотрены:
блочный или модульный принцип построения конструкции;
резервирование элементов системы, находящихся в особо напряженных условиях
работы;
регулярная метрологическая проверка САУ в процессе ее эксплуатации с
использованием либо встроенного, либо автономного устройства контроля и т.д.
В общем случае, погрешность САУ – случайный процесс. Ее полной
характеристикой является закон распределения, который может быть представлен в виде
условной, либо безусловной плотностей распределения вероятностей. Практически
использование плотности распределения вероятностей в качестве критерия погрешности
сопряжено с рядом трудностей и не всегда возможно. Поэтому принято оценивать
погрешности числовыми характеристиками, связанными тем или иным оператором с
законом распределения. К таким характеристикам относятся экстремальные и
интегральные характеристики, а также оценки, основанные на применении доверительных
интервалов.
При обработке сигналов, когда требуется наилучшее воспроизведение формы
полезного сигнала из его смеси с помехами, используются в основном два критерия:
критерий минимума среднеквадратичной ошибки и критерий максимума апостериорной
вероятности. Когда помехи не учитываются, может быть использован критерий минимума
модуля текущего значения ошибки.
Оптимизация адаптивных систем. Адаптивные системы в отличие от систем с
постоянными параметрами осуществляют автоматическую подстройку параметров
корректирующего устройства под переменные параметры датчиков, обеспечивая тем
самым выполнение основного условия коррекции в процессе нормального
функционирования систем. Адаптивные системы от остальных отличает наличие контура
управления корректирующим устройством. Он выполняет операции определения
характеристик сигналов системы в процессе ее нормального функционирования и
преобразования получаемых результатов определений в некоторый текущий критерий
управления с его последующей реализацией.
Классификация адаптивных систем. По характеру рабочей информации,
используемой для реализации процесса управления, адаптивные системы можно
разделить на две основные группы:
системы, содержащие в своем составе каналы параметрической идентификации и
осуществляющие управление параметрами корректирующего устройства непосредственно
через найденные оценки параметров датчиков;
системы (относящиеся к группе аналитических самонастраивающихся систем),
содержащие в своем составе контуры (модели) самонастройки и осуществляющие
управление параметрами корректирующего устройства через сигналы рассогласования
базовой субсистемы и самонастраивающейся модели.
По способу получения рабочей информации каждую из групп адаптивных систем
можно разделить на системы:
с непосредственным получением рабочей информации по основному параметру;
с получением рабочей информации по косвенным параметрам.
И, наконец, по способу отработки алгоритма управления адаптивные системы
можно разделить на системы:
с непрерывной отработкой алгоритма управления;
с периодической отработкой алгоритма управления.
Характерной особенностью адаптивных систем является то, что в них выполняются
одновременно процессы измерения, коррекции и управления. Системы при этом работают
в двух режимах – режиме обучения, в котором реализуются алгоритмы управления, и
режиме измерения (включая коррекцию). В режиме обучения процесс можно считать
завершенным, когда построена оптимальная модель базовой субсистемы, отвечающая
основному условию коррекции. В этом случае режим измерения завершается получением
оптимальных оценок процесса на входе САУ.
Синтез адаптивных систем методом функций Ляпунова
Существо задачи синтеза состоит в аналитическом поиске линейных законов
управления (регуляторов), обеспечивающих экстремум некоторого функционала,
заданного на движениях замкнутой нелинейной системы. При этом оптимизация
осуществляется на различных допустимых множествах линейных регуляторов, имеющих
произвольную или фиксированную структуру.
При этом в целом ряде ситуаций допустимые множества формируются так, чтобы корни
характеристического полинома соответствующего линейного приближения были
расположены в заданных областях открытой левой полуплоскости. Такую проблему
можно назвать задачей модальной оптимизации, поскольку она в явном виде связана с
вопросами теории модального управления.
В данной статье рассматриваются элементы формализованного подхода к постановке
указанной задачи и построению вычислительных схем ее решения на базе ряда идей
теории устойчивости Ляпунова.
В качестве исходной математической модели объекта управления будем принимать
систему обыкновенных дифференциальных уравнений вида
(1)
,
заданных на положительной полуоси времени
. Здесь
– вектор состояния
объекта,
– вектор управляющих воздействий,
– вектор возмущений,
действующих на объект. Будем считать, что – n-мерная вектор-функция с непрерывно
дифференцируемыми компонентами по совокупности аргументов.
Пусть заданы вектор функции
,
,
, определяющие
некоторое контролируемое (возможно – программное) движение объекта,
удовлетворяющие системе уравнений (1):
(2)
.
Обозначая через
,
,
отклонения соответствующих переменных
в (1) от указанного движения, определим этим соотношения
.
После подстановки (3) в (1) с учетом (2) получим уравнения возмущенного движения
объекта в отклонениях от контролируемого движения:
(4)
,
где
(3)
.
Из последних соотношений следует, что при условиях
,
,
система (4) находится в положении равновесия, что соответствует контролируемому
движению объекта управления, которое удовлетворяет системе (2). С учетом свойств
(5)
функции в (1), система (4) может быть линеаризована в окрестности нулевого
положения равновесия, что приводит к системе линейных дифференциальных уравнений
объекта управления вида
(6)
.
Матрицы системы (6) имеют своими компонентами соответствующие частные
производные от функции
, вычисленные при условиях
,
,
Как указано в работе [2], рассматриваемое контролируемое движение
.
,
,
можно сделать асимптотически устойчивым при
помощью обратных связей, если выполняются два условия:
1)
с
,
(7)
где
при
и
;
2) неуправляемая часть линейного приближения (6) является устойчивой системой.
В дальнейшем будем полагать, что матрицы
, ,
в (6) – постоянные, и будем
считать, что выполнены условия (7) а также равенство
,
гарантирующее полную управляемость по Калману.
Если приведенные выше условия выполняются то, согласно [2], нулевое положение
равновесия линейной системы с постоянными коэффициентами
(8)
(9)
может быть сделано асимптотически устойчивым с помощью регулятора прямого
действия
(10)
или с помощью регулятора непрямого действия
(11)
где
и
– постоянные матрицы.
Нетрудно показать, что аналогичное утверждение справедливо и для обобщенного
понятия регулятора непрямого действия, математическая модель которого может быть
представлена в следующем виде:
(12)
где
– вектор состояния регулятора. С помощью регулятора (12) можно
стабилизировать объект (9), обеспечивая произвольный спектр корней
характеристического полинома замкнутой системы, заданием матриц с постоянными
компонентами
. Замечание: вопрос о возможности введения в состав
регулятора производных до (
)-го порядка от измеряемых координат должен в
каждом конкретном случае обсуждаться особо.
С использованием понятия передаточной матрицы динамической системы от входа к
выходу, уравнения регулятора непрямого действия (12) могут быть представлены в виде
(13)
– передаточная матрица регулятора, где
– полиномиальная матрица размера
При этом справедливо равенство
– переменная Лапласа,
– полином степени
,
.
(14)
где
- единичная матрица размера
,
.
В дополнение к уравнениям линейного приближения (9), введем уравнение измерения, и
будем рассматривать линейную математическую модель объекта в виде
(15)
Здесь – постоянная матрица,
– вектор измеряемых координат, которые
используются при формировании регулятора
(16a)
или регулятора
(16b)
В последнем случае будем считать, что структура передаточной матрицы
фиксирована, причем выделен вектор
настраиваемых параметров, подлежащих
выбору в процессе синтеза.
Учитывая (3), замкнем нелинейную модель (1) линейным стационарным регулятором
(16б) и получим уравнения замкнутой нелинейной системы
(17)
На движениях системы (17) при условиях
некоторый неотрицательный функционал
,
,
зададим
(18)
,
который при прочих равных условиях превращается в функцию вектора настраиваемых
параметров регулятора.
В случае замыкания исходной нелинейной модели регулятором (16а), аналогично
получим
(19)
.
Определение 1. Регуляторы
и
будем называть оптимальными
по отношению к функционалу (19) и (18) соответственно, если они являются
стабилизирующими в указанном выше смысле и среди всех стабилизирующих
регуляторов вида (16а) и (16б) доставляют величинам
и
соответственно
наименьшие возможные значения.
Определение 2. Задачей модального синтеза (модальной оптимизации) будем называть
задачу поиска передаточной матрицы
(19а)
оптимального регулятора вида (16а)
на допустимом множестве
таком, что все корни характеристического полинома
замкнутой системы (15), (16а) располагались в заданной области
комплексной
плоскости.
Определение 3. Задачей модального параметрического синтеза (модальной
параметрической оптимизации) будем называть задачу поиска настраиваемых параметров
оптимального регулятора
, которую можно представить в виде
,(19б)
где множество
допустимых параметров таково, что все корни
характеристического полинома замкнутой системы (15), (16б) располагаются в заданной
области
комплексной плоскости.
Введем в рассмотрение понятие полноты структуры регулятора, для чего запишем
уравнения замкнутой линейной системы (15), (16б), предварительно представив уравнение
регулятора в развернутой форме (12):
(20)
Запишем характеристический полином
замкнутой линейной системы (20):
,
и в дальнейшем степень этого полинома будем обозначать через
.
Определение 4. Будем говорить, что структура регулятора (16б) является полной, если
степени полиномов в числителях и знаменателях компонентов передаточной матрицы
, а также размерность и состав компонентов вектора таковы, что с помощью
выбора этого вектора (т.е. назначения конкретных величин настраиваемых параметров)
можно обеспечить произвольный спектр корней характеристического полинома
замкнутой системы (20).
Определение 5. Степенью устойчивости полинома
называть число
с корнями
,
,...,
, будем
,
где – степень полинома
.
Прежде, чем непосредственно переходить к рассмотрению оптимизационных задач вида
(19а,б), предварительно рассмотрим один специальный подход к синтезу
стабилизирующих законов управления, который непосредственно базируется на втором
методе Ляпунова.
Пусть динамический объект управления описывается автономной нелинейной системой
обыкновенных дифференциальных уравнений вида
(21)
,
где вектор-функция
задана и непрерывна в некоторой области
,
включающей начало координат. Будем считать, что эта функция удовлетворяет условию
Липшица на любом замкнутом множестве
. Кроме того, будем полагать, что
система (21) имеет нулевое положение равновесия, т.е.
. Имеет место следующее
базовое утверждение теории Ляпунова:
Теорема Ляпунова об устойчивости. Если существует положительно определенная
функция
переменных, которая задана в области
, непрерывна там и имеет
непрерывные частные производные, причем такая, что ее производная по времени в силу
системы (21) является функцией отрицательно определенной, то движение
системы (21) является асимптотически устойчивым (в смысле Ляпунова).
В частности, теперь рассмотрим линейную стационарную систему обыкновенных
дифференциальных уравнений вида
(22)
,
где – матрица размера
с постоянными компонентами.
Известно, что необходимым и достаточным условием устойчивости нулевого положения
равновесия такой системы (или, что то же самое, всей системы (22) в целом) является
нахождение всех собственных чисел матрицы в открытой левой полуплоскости. Это
утверждение в подавляющем большинстве случаев используется в теории аналитического
синтеза стабилизирующих управлений.
Однако можно привести и другое (эквивалентное) утверждение, которое менее
распространено в практике аналитического синтеза, однако непосредственно связано с
теорией функций Ляпунова. На базе этого утверждения также можно построить
некоторые вычислительные методы аналитического синтеза, которые будут приведены
ниже.
Перед формулировкой утверждения, прежде всего, отметим, что для линейных систем
функция Ляпунова всегда может быть выбрана в виде квадратичной формы.
Действительно, зададим некоторую положительно определенную квадратичную форму
или, иными словами, зададим симметрическую матрицу c
положительными собственными значениями. Далее потребуем, чтобы нашлась другая
квадратичная форма
условием:
, которая связана с формой
следующим
(23)
.
Здесь через
Очевидно, что
обозначена полная производная функции
в силу системы (22).
(24)
Из (24) с учетом (23) имеем
, откуда следует
(25)
.
Полученное условие (25) называется уравнением Ляпунова и в данном случае служит для
нахождения неизвестной симметрической матрицы по заданным матрицам
(произвольная квадратная матрица) и (произвольная симметрическая матрица). При
этом справедливо следующее утверждение:
Теорема 1 (Теорема Ляпунова). Если в уравнении (25) матрица является гурвицевой, то
для любой симметрической положительно определенной матрицы это уравнение имеет
единственное решение – положительно определенную симметрическую матрицу
Обратно, если для какой либо симметрической положительно определенной матрицы
.
уравнение (25) допускает положительно определенное симметрическое решение
,
то матрица является гурвицевой.
Оригинальное доказательство этой теоремы приведено в работе [1]. Доказательство на
базе необходимого и достаточного условия (расположение собственных чисел матрицы
в открытой левой полуплоскости) асимптотической устойчивости приведено, например,
в работе [3] для случая
.
Связь теоремы 1 с теоремой об устойчивости очевидна. Действительно, задавая
произвольную положительно определенную матрицу R, мы гарантируем выполнение
условий теоремы 1 для функции Ляпунова
, если матрица найдена как
решение уравнения (25).
Заметим, что приведенная теорема 1 может быть сформулирована в другой,
эквивалентной, форме, связанной с понятием матричного неравенства. Предварительно
введем договоренность о том, что под записью
(
), где – симметрическая
матрица, будем понимать, что все ее собственные значения являются отрицательными
(положительными) вещественными числами. Справедливо следующее утверждение [4, 5]
и др.:
Теорема 2. Для того, чтобы матрица была гурвицевой, необходимо и достаточно, чтобы
существовало положительно определенное симметрическое решение
неравенства Ляпунова
, матричного
или, что то же самое, чтобы существовало симметрическое решение системы матричных
неравенств
Доказательство очевидно в силу теоремы 1.
Приведенные утверждения могут быть применены при анализе устойчивости линейных
стационарных систем. Для перехода к вопросам синтеза, вместо (22), рассмотрим
линейный объект управления с математической моделью вида
(26)
,
где через
обозначено управляющее воздействие. Будем считать, что матрица
имеет
постоянные компоненты, причем пара
является вполне управляемой.
Будем строить стабилизирующее управление для объекта (26) в виде обратной связи
(регулятора) по состоянию
,
(27)
где – постоянная матрица.
Сформулируем теорему, на базе которой можно формировать различные вычислительные
методы поиска матрицы
коэффициентов стабилизирующего регулятора (27).
Теорема 3. Для того, чтобы регулятор (27) стабилизировал объект управления (26),
необходимо и достаточно, чтобы матрица его коэффициентов была выбрана так, чтобы
существовала положительно определенная симметрическая матрица
удовлетворяющая условию
,
(28)
.
Доказательство. С учетом того, что матрица замкнутой системы определяется
выражением
, условие (28) непосредственно следует из теоремы 2.
Теорема 4. Матрица
коэффициентов любого регулятора (27), стабилизирующего объект
управления (26), может быть представлена в виде
матрица и прямоугольная матрица
матричных неравенств:
, где симметрическая
удовлетворяют следующей системе линейных
(29)
Доказательство. В соответствии с теоремой 3, для того, чтобы регулятор (27)
стабилизировал объект (26), необходимо и достаточно, чтобы матрица
его
коэффициентов обеспечивала существование положительно определенной
симметрической матрицы , удовлетворяющей условию
(30)
,
где
– матрица замкнутой системы. Преобразуем это условие, сначала
умножив его правую и левую часть слева на матрицу
повторив умножение на эту же матрицу справа:
обозначение
, а затем,
:
. Тогда, вводя
, вместо неравенства (30) имеем
,
откуда следует
,
или
. Отсюда, вводя обозначение
учитывая, что
, поскольку
(матрицы
и
и
симметрические), получим
.
Теперь будем считать, что мы имеем две независимые матричные переменные:
симметрическую матрицу
и прямоугольную матрицу
были эти матрицы, при условии
. Действительно, какими бы ни
всегда найдется матрица
,
обеспечивающая равенство
.
Итак, необходимое и достаточное условие устойчивости замкнутой системы с учетом
требования положительной определенности матрицы
принимает вид (29), что и
По существу, теорема 1.1.4 определяет схему построения произвольного
стабилизирующего регулятора вида (27). Действительно, если найти произвольную пару
матриц
и
, являющуюся решением системы линейных матричных
неравенств (29) (
– симметрическая,
– прямоугольная), то по формуле
(31)
можно определить матрицу коэффициентов регулятора.
В настоящее время теория линейных матричных неравенств находится в стадии
интенсивного развития как в аналитическом, так и в вычислительном плане. В частности,
в работе [5] получено следующее обобщение теоремы 2:
Теорема 5. Для того, чтобы все собственные значения матрицы находились в пределах
области
, заданной на комплексной плоскости выражением
(32)
,
где
, необходимо и достаточно, чтобы существовало
,
симметрическое решение
системы матричных неравенств вида
(33)
Замечание: в последней формуле использовано обозначение
.
АДАПТИВНАЯ ФИЛЬТРАЦИЯ ЦИФРОВЫХ ДАННЫХ
Пусть они постараются подчинить себе обстоятельства, а не подчиняются им
сами.
Гораций. Послания. Римский поэт, I в.д.н.э.
Если в этой теории Вы не увидите смысла, тем лучше. Можно пропустить
объяснения и сразу приступить к ее практическому использованию.
Валентин Ровинский. Теория карточных игр.
Киевский геофизик Уральской школы, ХХ в.
Содержание
Введение.
1. Общие сведения об адаптивной цифровой фильтрации. Основные области
применения. Адаптивный шумоподавитель. Адаптивный фильтр Винера. Адаптивный алгоритм
наименьших квадратов Уидроу-Хопфа. Рекурсивные схемы наименьших квадратов.
2. Основы статистической группировки информации. Предпосылки метода. Задача
статистической группировки. Использование априорных данных. Эффективность метода.
3. Статистическая регуляризация данных. Проверка теоретических положений метода.
Оценка сохранения разрешающей способности. Статистическая оценка регуляризации данных. Результаты
моделирования. Частотное представление. Пример практического использования.
4. Статистическая группировка полезной информации. Сущность аппаратной
реализации. Особенности аппаратной реализации. Реализация систем группировки информации. Пример
исполнения системы группировки информации.
ВВЕДЕНИЕ
В традиционных методах обработки данных информация извлекается из входных
сигналов линейными системами с постоянными параметрами алгоритмов преобразования
данных. Системы могут иметь как конечную, так и бесконечную импульсную
характеристику, но передаточная функция систем не зависит от параметров входных
сигналов и их изменения во времени.
Адаптивные устройства обработки данных отличаются наличием определенной
связи параметров передаточной функции с параметрами входных, выходных, ожидаемых,
прогнозируемых и прочих дополнительных сигналов или с параметрами их
статистических соотношений, что позволяет самонастраиваться на оптимальную
обработку сигналов. В простейшем случае, адаптивное устройство содержит
программируемый фильтр обработки данных и блок (алгоритм) адаптации, который на
основании определенной программы анализа входных, выходных и прочих
дополнительных
данных
вырабатывает
сигнал
управления
параметрами
программируемого фильтра. Импульсная характеристика адаптивных систем также может
иметь как конечный, так и бесконечный характер.
Как правило, адаптивные устройства выполняются узкоцелевого функционального
назначения под определенные типы сигналов. Внутренняя структура адаптивных систем и
алгоритм адаптации практически полностью регламентируются функциональным
назначением и определенным минимальным объемом исходной априорной информации о
характере входных данных и их статистических и информационных параметрах. Это
порождает многообразие подходов при разработке систем, существенно затрудняет их
классификацию и разработку общих теоретических положений /л38/. Но можно отметить,
что наибольшее применение при разработке систем для адаптивной обработки сигналов
находят два подхода: на основе схемы наименьших квадратов (СНК) и рекурсивной схемы
наименьших квадратов (РСНК).
11.1. ОБЩИЕ СВЕДЕНИЯ ОБ АДАПТИВНОЙ ЦИФРОВОЙ ФИЛЬТРАЦИИ [38, 43].
Основные области применения адаптивной фильтрации – очистка данных от
нестабильных мешающих сигналов и шумов, перекрывающихся по спектру со спектром
полезных сигналов, или когда полоса мешающих частот неизвестна, переменна и не
может быть задана априорно для расчета параметрических фильтров. Так, например, в
цифровой связи сильная активная помеха может интерферировать с полезным сигналом, а
при передаче цифровой информации по каналам с плохими частотными характеристиками
может наблюдаться межсимвольная интерференция цифровых кодов. Эффективное
решение этих проблем возможно только адаптивными фильтрами.
Частотная характеристика адаптивных фильтров автоматически регулируется или
модифицируется в соответствии с определенным критерием, позволяющем фильтру
адаптироваться к изменениям характеристик входного сигнала. Они достаточно широко
используются в радио- и гидролокации, в системах навигации, в выделении
биомедицинских сигналов, и многих других отраслях техники. В качестве примера
рассмотрим наиболее распространенные схемы адаптивной фильтрации сигналов.
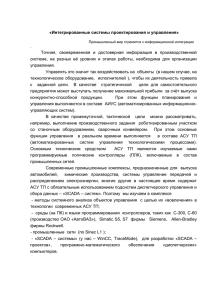
Адаптивный шумоподавитель. Блок-схема фильтра приведена на рис. 11.1.1.
Фильтр состоит из блока
цифрового фильтра с регулируемыми
коэффициентами
и
адаптивного
алгоритма для настройки и изменения
коэффициентов фильтра. На фильтр
одновременно подаются входные
сигналы y(k) и x(k). Сигнал y(k)
содержит полезный сигнал s(k) и
некоррелированный
с
ним
загрязняющий сигнал g(k). Сигнал
Рис. 11.1.1.
x(k) какого-либо источника шума,
коррелированный с g(k), который используется для формирования оценки сигнала ğ(k).
Полезный сигнал оценивается по разности:
š(k) = y(k) – ğ(k) = s(k) + g(k) – ğ(k).
(11.1.1)
Возводим уравнение в квадрат и получаем:
š2(k) = s2(k) + (g(k) – ğ(k))2 + 2.s(k) (g(k) – ğ(k)).
(11.1.2)
Вычислим математическое ожидание левой и правой части этого уравнения:
M[š2(k)] = M[s2(k)] + M[(g(k) – ğ(k))2] + 2M[s(k) (g(k) – ğ(k))].
(11.1.3)
Последнее слагаемое в выражении равно нулю, поскольку сигнал s(k) не
коррелирует с сигналами g(k) и ğ(k).
M[š2(k)] = M[s2(k)] + M[(g(k) – ğ(k))2].
(11.1.4)
В этом выражении M[s2(k)] = W(s(k)) – мощность сигнала s(k), M[š2(k)] = W(š(k)) – оценка
мощности сигнала s(k) и общая выходная мощность, M[(g(k) – ğ(k))2] = W(g) - остаточная
мощность шума, который может содержаться в выходном сигнале. При настройке
адаптивного фильтра к оптимальному положению минимизируется мощность остаточного
шума, а, следовательно, и мощность выходного сигнала:
min W(š(k)) = W(s(k)) + min W(g).
(11.1.5)
На мощность полезного сигнала настройка не влияет, поскольку сигнал не
коррелирован с шумом. Эффект минимизации общей выходной мощности будет
выражаться в максимизации выходного отношения сигнал/шум. Если настройка фильтра
обеспечивает равенство ğ(k) = g(k), то при этом š(k) = s(k). Если сигнал не содержит шума,
адаптивный алгоритм должен устанавливать нулевые значения всем коэффициентам
цифрового фильтра.
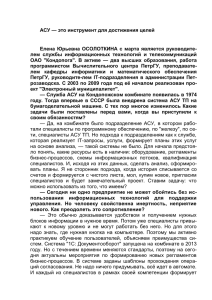
Адаптивный фильтр Винера. Входной сигнал y(k) фильтра, приведенного на рис.
11.1.2, включает компоненту, коррелированную с со
вторым сигналом x(k), и полезную компоненту,
некоррелированную с x(k). Фильтр формирует из x(t)
сигнал ğ(k) - оптимальную оценку той части у(k),
которая коррелированна с x(k), и вычитает ее из
сигнала y(k). Выходной сигнал:
N
Рис. 11.1.2.
e(k) = y(k) - ğ(k) = y(k) - HT Xk = y(k) -
h(n)
n 0
x(k-n),
где HT и Xk – векторы весовых коэффициентов фильтра и его входного сигнала.
Аналогично предыдущему методу, возводим в квадрат левую и правую части
уравнения, находим математические ожидания обеих частей и получаем уравнение
оптимизации выходного сигнала:
2PTH + HTRH,
(11.1.6)
2
2
где = M[y (k)] – дисперсия y(k), P = M[y(k)Xk] – вектор взаимной корреляции, R =
M[XkXkT] – автокорреляционная матрица.
В стационарной среде график зависимости от
коэффициентов H представляет собой чашеобразную
поверхность
адаптации
(рис.
11.1.3).
Градиент
поверхности:
d / dH = -2P + 2RH.
Каждому набору коэффициентов h(n) на этой
поверхности соответствует определенная точка. В точке
минимума градиент равен нулю и вектор весовых
коэффициентов фильтра является оптимальным:
Рис. 11.1.3.
Hopt = R-1P.
(11.1.7)
Эта формула называется уравнением Винера-Хопфа.
Задачей алгоритма автоматической настройки является подбор таких весовых
коэффициентов фильтра, которые обеспечивают работу в оптимальной точке поверхности
адаптации.
Однако практическое применение фильтра затрудняется использованием
корреляционных матриц R и P, априори неизвестных, и которые могут изменяться со
временем для нестационарных сигналов.
Адаптивный алгоритм наименьших квадратов Уидроу-Хопфа. По существу, это
модификация фильтра Винера, в которой вместо вычисления коэффициентов (11.1.7) за
один шаг используется алгоритм последовательного спуска в оптимальную точку при
обработке каждой выборки:
Hk+1 = Hk - ek Xk,
(11.1.8)
T
ek = yk - H Xk.
(11.1.9)
Условие сходимости к оптимуму:
0 < > 1/max,
(11.1.10)
где - параметр скорости спуска, max – максимальное собственное значение
ковариационной матрицы данных. Блок-схема алгоритма приведена на рис. 11.1.4.
Рис. 11.1.4. Алгоритм адаптации методом наименьших квадратов.
На практике точка максимальной оптимальности флюктуирует около теоретически
возможной. Если входной сигнал нестационарный, то изменение статистик сигнала
должно происходить достаточно медленно, чтобы коэффициенты фильтра успевали
следить за этими изменениями.
Рекурсивные схемы наименьших квадратов отличаются тем, что вычисление
каждой последующей выборки коэффициентов h(n) производится не только по
коэффициентам только одной предыдущей выборки, но и с определенной длиной
постепенно затухающей памяти по предшествующим выборкам, что позволяет снижать
флюктуации оценок при обработке стационарных сигналов.
11.2. ОСНОВЫ СТАТИСТИЧЕСКОЙ ГРУППИРОВКИ ИНФОРМАЦИИ.
При построении систем адаптивной фильтрации данных большое значение имеют
статистические характеристики обрабатываемых сигналов и шумов, их стационарность, и
наличие какой-либо дополнительной информации,
коррелированной
с
основной.
Возможность использования дополнительной информации при построении адаптивных
систем рассмотрим на конкретном примере – системе адаптивной фильтрации данных
непрерывных ядерногеофизических измерений.
Предпосылки метода. Физической величиной, регистрируемой в процессе ядернофизических измерений в геофизике, обычно является частота импульсных сигналов на
выходе детекторов ионизирующего излучения в интегральном или дифференциальном
режиме амплитудной селекции. Значения измеряемой величины, как статистически
распределенной по своей природе, могут быть определены только путем усреднения числа
актов регистрации ионизирующих частиц по интервалам времени. Зарегистрированное
количество импульсов определяет статистическую погрешность единичного измерения, а
временной интервал усреднения, обеспечивающий нормативную погрешность – их
производительность. Для методов с непрерывной регистрацией информации во времени
(или в пространстве) временное окно измерений определяет также временную (или
пространственную, с учетом скорости перемещения детектора) разрешающую
способность интерпретации результатов измерений, при этом эффективность регистрации
информации обычно ограничена условиями измерений и/или техническими средствами их
исполнения. Типичный пример - каротаж скважин, где возможности увеличения
интенсивности потоков информации ограничены параметрами эффективности
регистрации и чувствительности детекторов излучения, которые зависят от их типа и
размеров. Размеры детекторов, естественно,
существенно зависят от размеров
скважинных приборов, которые, в свою очередь, ограничены диаметрами скважин.
Ниже рассматривается возможность повышения точности и производительности
непрерывных ядерно-физических измерений, для наглядности, применительно к условиям
измерений в варианте скважинного гамма-опробования, хотя в такой же мере она может
быть использована в авто- и аэрогаммасъемке, при радиометрическом обогащении руд, в
рентгенорадиометрии и других методах ядерной геофизики. Предполагается, что
регистрация данных производится в цифровой форме с накоплением отсчета по
постоянным интервалам дискретизации данных (по времени и по пространству, при
условии постоянной скорости перемещения детектора).
В общем случае полезная (целевая) информация может присутствовать в нескольких
энергетических интервалах спектра излучения. Рабочими интервалами измерений обычно
считаются участки спектра, где полезная информация присутствует в "чистом" виде либо
в смеси с помехами (фоном), значение которых может быть учтено при обработке
результатов измерений. Так, например, при гамма-опробовании пород на содержание
естественных радионуклидов (ЕРН) регистрируется излучение с энергией более 250-300
кэВ, представленное в основном первичными и однократно рассеянными квантами,
плотность потока которых пропорциональна массовой доле ЕРН в породах. Плотность
потока излучения в низкоэнергетическом интервале спектра (20-250 кэВ, в основном
многократно рассеянное излучение) также зависит от массовой доли ЕРН, но эта
зависимость является параметрически связанной с эффективным атомным номером
излучающе-поглощающей среды в области детектора, вариации которого по стволу
скважины могут приводить к большой погрешности интерпретации результатов
измерений. Между тем плотность потока информации (относительно массовой доли
ЕРН) в интервале 20-250 кэВ много выше, чем в интервале более 250 кэВ, особенно при
регистрации излучения сцинтилляционными детекторами малых объемов, которые имеют
повышенную чувствительность именно к низкоэнергетической части спектра излучения.
Задача статистической группировки информации в потоках сигналов в общей и
наиболее простой форме может быть сформулирована следующим образом. Полезная
информация присутствует в двух статистически независимых потоках сигналов (в двух
неперекрывающихся интервалах спектра излучения). В первом потоке сигналов, условноосновном, полезная информация присутствует в "чистом" виде: плотность потока
сигналов пропорциональна определяемой физической величине. Во втором потоке,
условно-дополнительном,
на
полезную
информацию
наложено
влияние
дестабилизирующих факторов, значение которых неизвестно. При отсутствии
дестабилизирующих факторов коэффициент корреляции средних значений плотностей
потоков в этих двух потоках сигналов постоянен и близок к 1. Для снижения статистической погрешности измерений требуется осуществить извлечение полезной
информации из дополнительного потока сигналов и ее суммирование с основным
потоком.
Обозначим потоки, а равно и частоты основного и дополнительного потоков
сигналов индексами n и m (импульсов в секунду), связь потоков по частотам индексом х =
m/n. Определению подлежит частота потока n. Значение х может изменяться за счет влияния
дестабилизирующих факторов на поток m и в общем случае представляет собой случайную
величину, распределенную по определенному закону с плотностью вероятностей Р(х), математическим ожиданием x , и дисперсией Dx.
На основе теоремы Байеса, плотность вероятностей распределения частоты n по
измеренному за единичный интервал t числу отсчетов сигнала N определяется выражением:
PN(n) = P(n) Pn(N) P(N),
(11.2.1)
N -n
Pn(N) = (nТ) e N! ,
(11.2.2)
P(N) = Pn(N) P(n) dn,
(11.2.3)
n
где: P(n) - априорная плотность вероятностей частоты n, Pn(N) - апостериорное распределение вероятностей числовых отсчетов N (закон Пуассона). Принимая в дальнейшем в
качестве искомой величины значения отсчетов z=n по интервалам (экспозиция цифровых
отсчетов или скользящее временное окно аналоговых данных) и подставляя (11.2.2, 11.2.3) в
(11.2.1), получаем:
PN(z) = P(z) zN e-z
z
P(z) zN e-z dz.
(11.2.4)
При неизвестном распределении значений z априорная плотность распределения
P(z) принимается равномерной от 0 до , при этом из выражения (11.2.4) следуют
общеизвестные выражения:
z = Dz = N+1 N,
(11.2.5)
2
2
z = Dz z = 1 (N+1) 1N.
(11.2.6)
Значениями единиц в выражениях пренебрегаем, что не только корректно в
условиях "хорошей" статистики, но и необходимо в режиме последовательных
непрерывных измерений для исключения смещения средних значений.
Как следует из теории гамма-каротажа (ГК) и достаточно хорошо подтверждено
практикой гамма-опробования, пространственная разрешающая способность гаммакаротажных измерений при интерпретации результатов ГК на содержание естественных
радиоактивных элементов в породах по стволу скважин в среднем составляет 10 см, а в
скважинах малого диаметра может даже повышаться до 5-7 см. Однако реализация такой
разрешающей способности возможна только в условиях достаточно "хорошей"
статистики. Коэффициент усиления дисперсии помех цифровых фильтров деконволюции,
которые используются при интерпретации ГК, в среднем порядка 12 и изменяется от 4 до
25 в зависимости от плотности пород, диаметра скважин, диаметра скважинных приборов
и пр. Отсюда следует, что для достижения разрешающей способности в 10 см при
нормативной погрешности дифференциальной интерпретации не более 10-20 %
статистическая погрешность измерений не должна превышать 3-7 %. А это, в свою
очередь, определяет объем отсчета за единичную экспозицию не менее 200-1000
импульсов. При гамма-каротаже последнее возможно только для пород с относительно
высоким содержанием ЕРН (более 0.001 % эквивалентного урана), при использовании
детекторов больших размеров (с эффективностью регистрации более 10 имп/сек на 1
мкР/час) и при низкой скорости каротажа (не более 100-300 м/час). В той или иной мере
эта проблема характерна для всех методов ядерной геофизики, и особенно остро стоить в
спектрометрических модификациях измерений.
Вместе с тем следует отметить, что процесс непрерывных измерений имеет
определенную физическую базу как для применения методов регуляризации результатов
интерпретации данных, так и для регуляризации непосредственно самих статистических
данных (массивов отсчетов N) при их обработке.
Простейшим способом подготовки цифровых данных для интерпретации является
их низкочастотная фильтрация методом наименьших квадратов (МНК) или весовыми
функциями (Лапласа-Гаусса, Кайзера-Бесселя и др.). Однако любые методы
низкочастотной фильтрации данных снижают пространственную разрешающую
способность интерпретации, так как кроме снижения статистических флюктуаций
приводят к определенной деформации частотных составляющих полезной части сигнала,
спектр которого по условиям деконволюции должен иметь вещественные значения вплоть
до частоты Найквиста. В определенной мере ликвидировать этот негативный фактор
позволяет метод адаптивной регуляризации данных (АРД).
Выражения (11.2.5-6) получены в предположении полной неизвестности
априорного распределения P(z) для отсчетов в каждой текущей экспозиции . Между тем,
при обработке данных непрерывных измерений, и тем более каротажных данных, которые
обычно являются многопараметровыми, для каждого текущего отсчета при обработке
данных может проводиться определенная оценка распределения P(z). Как минимум,
можно выделить два способа оценки распределения P(z).
Способ 1. По массивам данных параллельных измерений каких-либо других
информационных параметров, значения которых достаточно четко коррелированны с
обрабатываемым массивом данных либо в целом по пространству измерений, либо в
определенном скользящем интервале сравнения данных. К таким массивам относятся,
например, предварительные каротажные измерения в процессе бурения скважин,
измерения другим прибором, с другой скоростью каротажа, в другом спектральном
интервале излучения, и даже другим методом каротажа. При гамма-опробовании оценка
распределения P(z) может производиться по параллельным измерениям интенсивности
потока m в низкочастотном интервале спектра горных пород.
Способ 2. При единичной диаграмме ГК оценка распределения P(z) в каждой
текущей точке обработки данных может выполняться по ближайшим окрестностям
данной точки, захватывающим более широкий пространственный интервал по сравнению
с интервалом отсчетов.
Использование априорных данных. Допустим, что кроме основного массива
данных N, подлежащего обработке (подготовке к интерпретации), мы располагаем
дополнительным массивом данных M, значения которого в определенной степени
коррелированы с массивом N. При отсутствии дополнительных массивов способ 2
позволяет получить массив М обработкой массива N цифровым фильтром МНК (или
любым другим весовым фильтром) со скользящим временным окном T 3 (M(k) = m(k)
сглаженного сигнала m(k) = n(k) ③ h, где h – оператор симметричного цифрового
фильтра). Отметим также, что 2-ой способ всегда может использоваться для
регуляризации данных независимо от наличия данных для 1-го метода.
Массив М позволяют дать оценку статистических характеристик распределения
P(z). Так, если для тех же интервалов времени в массиве М имеются отсчеты М = mk
(или приведенные к ним отсчеты какого-либо другого параметра), то можно записать:
(xz) M
P(x) e xz dx ,
PM(z) = x
(11.2.7)
x
M!
где Р(х) – априорная плотность распределения значений xk = mk/nk, которые в общем
случае также могут быть случайными. При равномерном распределении Р(х) от 0 до
для отсчета М равновероятно любое значение z, т.е. эффект от измерений в потоке m
отсутствует. Однако по исходным условиям задачи в потоке m обязательно присутствие
полезной информации, а, следовательно, и существование, как минимум,
определенных границ распределения Р(х) от х min > 0 до x max << , и среднего
значения x по пространству измерений. При этом из выражения (11.2.7) следует, что
наиболее вероятное значение z a , "априорное" для отсчетов z=n в потоке n по
измерениям в потоке m (отсчетам М), должно быть равно:
za = (M+1) x М x .
(11.2.8)
При статистической независимости величин х и М относительная средняя
квадратическая погрешность определения значений za по отсчетам в массиве М:
za2 = M2 + x2.
(11.2.9)
Отсюда дисперсия распределения значений za:
Dza = (DM+M2x2) x 2 = D(M) x 2,
(11.2.10)
D(M) = DM+M2x2 = DM+Dxm ,
(11.2.11)
DM = М+1 М, Dxm = M2x2,
где значение дисперсии DM определяется статистикой отсчетов в массиве М при х = const,
значение Dxm представляет собой дисперсию значений М за счет флюктуаций величины х,
а сумма D(M) определяет полную дисперсию отсчетов М.
Влияние Р(х) на форму распределения РМ(z) сказывается в его "растягивании" по
координате z относительно модального значения, при этом решение интеграла (11.2.7) в
первом приближении может быть представлено в следующем виде:
PM(z) b
a1
(bz )
e-bz.
(a 1)!
(11.2.12)
Для данного распределения:
z = za = ab,
Dza = ab2,
(11.2.13)
(11.2.14)
С учетом выражений (11.2.8) и (11.2.10):
a = MDM(Dza x 2) = MDMD(M),
(11.2.15)
b = DM(Dza x ) = x DМD(M).
(11.2.16)
Значение 'а' в выражении (11.2.15) принимается целочисленным. Выражение
(11.2.12) может быть принято для распределения (11.2.4) в качестве априорного
распределения вероятностей Р(z), при этом:
a N1
[z ( b 1)]
e-z(b+1).
(11.2.17)
(a N 1)!
Отсюда, математическое ожидание и дисперсия z:
z = (N+a)(b+1),
(11.2.18)
2
Dz = (N+a)(b+1) .
(11.2.19)
C использованием выражений (11.2.15-16):
z = N+(1-)M x ,
(11.2.20)
где и (1-) – весовые коэффициенты доверия отсчетам N и M:
= D(M)(DN x 2+D(M)).
(11.2.21)
Дисперсия и относительная средняя квадратическая погрешность отсчетов z:
ND(M) MD M
Dz = D(M)
,
(11.2.22)
[D N x 2 D(M)] 2
z2 =1(N+MDMD(M)).
(11.2.23)
Эффективность метода. Сравнение выражений (11.2.20-23) и (11.2.5-6) позволяет
дать оценку эффекта использования дополнительной информации из статистически
независимого от N потока М (произвольная дополнительная информация).
1. При x const имеет место х2 0, Dxm 0 и дисперсия отсчетов в массиве М
определяется только статистикой потока:
D(M) DM = M, z = (N+M) ( x +1),
z2 1(N+M) < N2 = 1N,
(11.2.24)
2
2
2
= N z = [N+M D(M)] N 1+MN,
что соответствует определению z по двум независимым измерениям и эффект
использования дополнительной информации максимален. Так, при M N, 2 и
погрешность измерений уменьшается в ~1.4 раза.
PN(z) = (b+1)
2. В общем случае Dxm 0, при этом D(M) > DМ и положительный эффект
снижается. В пределе: x , Dxm , D(M) , 1, z N, z N и
положительный эффект полностью вырождается. Во всех остальных случаях > 1 и z <
N. Отсюда следует, что при наличии коррелированной информации в массиве М
положительный эффект, в той или иной мере, всегда имеет место.
3. Положительный эффект тем больше, чем больше значение x = m/n, меньше
флюктуации х (величина х), и меньше значения отсчетов N = n. Положительный эффект
увеличивается именно в тех случаях, когда особенно остро ощущается недостаток
информации: при малых значениях плотности потока излучения и/или экспозиции
измерений.
Аналогичный эффект будет иметь место и при формировании отсчетов M по
окрестностям текущих точек обработки данных путем определения их среднего значения
(низкочастотное сглаживание массива n). Предварительное низкочастотное сглаживание
может применяться и для статистически независимого дополнительного массива m, что
будет повышать достоверность прогнозных отсчетов и увеличивать глубину
регуляризации, если это сглаживание при регуляризации по формулам (11.2.20 и 21) не
сказывается на изменении формы основного сигнала. Последнее определяется
соотношением частотных спектров основного сигнала и оператора сглаживания.
Возможны два способа реализации уравнения (11.2.20): непосредственно в
процессе измерений методом статистической группировки полезной информации (СГПИ)
в реальном масштабе времени, или методом статистической регуляризации данных (СРД),
зарегистрированных в виде временного (пространственного) распределения в
параллельных массивах отсчетов.
11.3. СТАТИСТИЧЕСКАЯ РЕГУЛЯРИЗАЦИЯ ДАННЫХ.
Как следует из выражения (11.2.21), для практического использования информации
из дополнительных потоков данных необходимо установить значения x и дисперсию
D(M), причем, исходя из задания последней по выражению (11.2.11), должно быть
известно значение x - относительной средней квадратической флюктуации величины х.
Применительно к СРД определение значений x и x по зарегистрированным массивам данных не представляет затруднений как в целом по пространству измерений, так и
в виде распределений в скользящем окне усреднения данных. Последнее эквивалентно
приведению Dxm => 0 для текущей точки обработки данных по информации ее ближайших
окрестностей и позволяет производить максимальное извлечение полезной информации
из дополнительных потоков сигналов, если частотный спектр распределения величины х
по пространству измерений много меньше частотного спектра полезного сигнала.
Отметим, что информация о распределении х также может иметь практическое значение
(в частности, при гамма-опробовании с дополнительным потоком сигналов в
низкоэнергетическом диапазоне спектра излучения - для оценки эффективного атомного
номера горных пород).
Проверка теоретических положений метода
АРД проводилась путем
статистического моделирования соответствующих массивов данных и их обработки
цифровыми фильтрами.
В таблице 1 приведены 4 группы результатов обработки по формулам (11.2.20-21)
двух статистически независимых и постоянных по средним значениям массивов данных n
и m (модели постоянных полей) при различных установках СРД по скользящему окну К с
счета текущих значений x i = mi/ni и Di(М) по массиву m. Текущая точка обработки данных
– по центру окна. Количество отсчетов в каждом массиве – 1000, распределение значений
отсчетов соответствует закону Пуассона. Определение прогнозных отсчетов Мi по
массиву m для использования в уравнении (11.2.20) проводилось со сглаживанием
отсчетов в скользящем окне Ks низкочастотного цифрового фильтра (вариант без
сглаживания при Ks = 1). В качестве низкочастотного фильтра в алгоритме СРД
используется (здесь и в дальнейшем) весовое окно Лапласа-Гаусса. Теоретическое
значение Dz.т. дисперсии результатов z определялось по выражению (11.2.22) с расчетом
дисперсии D(M) по выражению D(M) = M [1+ M (1/(Kc N )+1/(Kc M ))]. При сглаживании
прогнозных отсчетов значение DM в выражении (11.2.22) принималось равным DM. =
M Hs, где Hs – коэффициент усиления сглаживающим фильтром дисперсии шумов (сумма
квадратов коэффициентов цифрового фильтра). Дополнительно в таблице приводятся
зарегистрированные средние значения коэффициента снижения статистических
флюктуаций = n2/z2.
Таблица 1. Статистика результатов моделирования СРД.
(Основной массив n = 9.9, Dn = 9.7, дополнительный массив m = 9.9, Dm = 9.9, 1000 отсчетов.)
Kc
Ks
z
Dz
Dz.т.
Kc
Ks
z
Dz
Dz.т.
3
1
9,7
5,7
6,19
1,7
11
3
9,6
3,6
3,80
2,8
5
1
9,7
5,4
5,78
1,8
11
5
9,6
3,3
3,55
3,0
11
1
9,6
5,1
5,36
1,9
11
11
9,6
3,1
3,22
3,2
21
1
9,6
5,0
5,18
2,0
11
21
9,6
3,0
3,11
3,3
51
1
9,6
5,0
5,05
2,0
11
51
9,6
3,0
2,99
3,3
3
3
9,7
4,1
4,71
2,4
3
11
9,8
4,5
4,26
2,2
5
5
9,7
3,6
4,01
2,8
5
11
9,7
3,5
3,78
2,8
11
11
9,6
3,1
3,22
3,2
11
11
9,6
3,1
3,22
3,2
21
51
21
51
9,6
9,6
2,9
2,7
2,91
2,66
3,4
3,7
21
51
11
11
9,6
9,6
3,1
3,1
3,12
2,99
3,2
3,2
Как видно из данных таблицы, практические результаты фильтрации достаточно
хорошо совпадают с ожидаемыми по данным теоретических расчетов. Некоторое
уменьшение среднего значения z по отношению к исходному среднему значению n
определяется асимметричностью пуассоновского типа модели. При малых средних
значениях модельных отсчетов в массиве m это приводит к определенной статистической
асимметрии в работе СРД, т.к. при (+m)2 > (-m)2 среднестатистическое доверие к
дополнительной информации с отсчетами Mi+ меньше, чем с отсчетами Mi-. Этим же
фактором, по-видимому, вызвано и большее расхождение между теоретическими и
фактическими значениями Dz при малых значениях окна Кс. Можно также заметить, что
по значению коэффициента фильтрация выходит на теоретические значения ( 1+MN)
только при достаточно точном определении значений x i и Di(М), что требует увеличения
окна Кс счета этих параметров для полного использования дополнительной информации.
Эффект
использования
Таблица 2.
дополнительной информации, в полном
соответствии с выражением (11.2.22),
усиливается
при
предварительном
сглаживании статистических вариаций
отсчетов Mi и при увеличении значений
отсчетов дополнительного массива
(материалы по последнему случаю не
приводятся, т.к. не имеют какой-либо
дополнительной
информации).
В
спокойных по динамике полях еще
большая глубина регуляризации может
быть достигнута при счете значений x i
и Dm по сглаженному массиву М, что
позволяет повысить вес прогнозных отсчетов Mi. Результаты моделирования данного
варианта в тех же условиях, что и для таблицы 1, приведены в таблице 2. Такой же
эффект, в принципе, может достигаться и непосредственным введением дополнительного
коэффициента веса в выражение (11.2.20) в качестве множителя для значения D(M), что
позволяет осуществлять внешнее управление глубиной регуляризации.
Оценка сохранения разрешающей способности полезной информации была
проведена на фильтрации детерминированных сигналов n и m предельной формы – в виде
прямоугольных импульсов. Оценивались два фактора: сохранение формы полезного
сигнала и подавление статистических шумов, наложенных на полезный сигнал.
При установке СРД без усреднения данных по массиву М (К s = 1, прогноз Мi по
текущим значениям массива М) при любых значениях окна Кс выходной массив Z без
всяких изменений повторяет массив N, т.е. не изменяет полезный сигнал и полностью
сохраняет его частотные характеристики. Естественно, при условии, что массив М
пропорционален массиву N.
При Кs > 1 форма выходных кривых несколько изменяется и приведена на рис.
11.3.1. В индексах выходных кривых z приведена информация по установкам окон СРД:
первая цифра - окно счета дисперсии DM и текущего значения x i (в количестве точек
отсчетов), вторая цифра (через флеш) - окно сглаживания отсчетов М весовой функцией
Лапласа-Гаусса и определения прогнозных отсчетов Мi. Для сравнения с результатами
типовой низкочастотной фильтрации на рисунке приведена кривая n25 отсчетов N,
сглаженных весовой функцией Лапласа-Гаусса с окном 25 точек.
Рис. 11.3.1. СРД прямоугольного импульса. Счет Dm по несглаженному массиву М.
На рис. 11.3.1а приведен результат СРД прямоугольного импульса с амплитудным
значением 10 на фоне 5 при отношении m/n = 1 (равные значения отсчетов N и М).
Дисперсия DN в выражении (11.2.21) принималась равной значению отсчетов N
(статистика Пуассона). Как видно на рисунке, при сохранении фронтов сигнальной
функции сглаживание прогнозных значений Мi приводит к появлению искажения формы
сигнала по обеим сторонам скачка, интервал которого тем больше, чем больше значение
Ks. Амплитудное значение искажений, как это и следует из выражения (11.2.21), в первую
очередь зависит от соотношения текущих значений DN и D(M) и в меньшей степени от
глубины сглаживания прогнозных отсчетов.
Максимальную величину искажения для точек скачка в первом приближении
можно оценить из следующих соображений. Значения D(M) между точками скачка равны
D(M) = А2/4, где А - амплитуда скачка, при этом значения коэффициента для нижней и
верхней точек скачка определяются выражениями А2/(4DN+A2), где DN = N точки
скачка (для статистики Пуассона). Отсюда, при прогнозном значении М N+А/2 для
нижней точки скачка и M N-A/2 для верхней точки относительная величина изменений
N определится выражением 1/(2N/A+A), т.е. будет тем меньше, чем больше значения
А и N и больше отношение N/A, что можно наглядно видеть на рис. 11.3.1в. Из этого
выражения также следует, что максимальные искажения скачков, вносимые системой
СРД, будут всегда в несколько раз меньше, чем статистические флюктуации
непосредственных отсчетов = 1/ N на краях скачков.
При увеличении глубины регуляризации введением счета дисперсии D(M) по
сглаженному массиву М картина искажений несколько изменяется и приведена на рис.
11.3.2. Реакция СРД на сглаживание дисперсии D(M) проявляется в своеобразной
компенсации абсолютных отклонений отсчетов непосредственно по сторонам скачка
отклонениями противоположного знака в более дальней зоне от скачка. Максимальные
значения искажений остаются примерно на таком же уровне, как и для работы по
несглаженной дисперсии D(M), с несколько меньшей зависимостью от увеличения
значений N и А.
Рис. 11.3.2. СРД прямоугольного импульса. Счет Dm по сглаженному массиву М.
В приведенных примерах значение окна счета Кс принималось равным значению
окна сглаживания Кs дополнительного массива М. При Кс > Ks картина процесса
практически не изменяется. При обратном соотношении размеров окон вступает в
действие второй фактор - отклонение от фактических значений счета текущих значений xi
= m/n в малом окне Кс по массиву отсчетов, сглаженных с большим окном Ks. На
расстояниях от скачка функции, больших Кс/2, СРД переходит в режим предпочтения
сглаженных значений массива М, т.к. D(M) 0, что при Кс < Ks может приводить к
появлению существенной погрешности – выбросов на расстояниях Кс/2 от скачков.
Естественно, что при практических измерениях таких условий наблюдаться не будет и
эффект резко уменьшится, но для полного его исключения вариант Kc Ks можно считать
предпочтительным.
Рис. 11.3.3. СРД сигнала N по массиву M.
(Счет Dm по несглаженному массиву М).
Рис. 11.3.4. Коэффициент .
(Среднее статистическое по 50 циклам)
На рис. 11.3.3 приведен пример регистрации рандомизированного модельного
сигнала в виде прямоугольного импульса амплитудой 40 на фоне 10, на котором виден
принцип работы СРД. Как и следовало ожидать, СРД производит сглаживание
статистических флюктуаций фона и сигнала за пределами зоны Кс от скачка, отдавая
предпочтение сглаженным прогнозным значениям Мi, и не изменяет значения фона и
сигнала в пределах этой зоны в связи с резким возрастанием текущих значений D(M) в
выражении (11.3.21). Изменение коэффициента в зоне скачка, управляющего
формированием выходных отсчетов, приведено на рис. 11.3.4 (среднестатистическое по
50-ти циклам рандомизации для модельного импульса на рис. 11.3.3) и наглядно
показывает принцип адаптации СРД к динамике изменения значений обрабатываемых
сигналов.
по прямоугольным импульсам
по 50-ти циклам рандомизации исходных массивов N и M. В качестве
Статистическая оценка регуляризации данных
проводилась
примера на рисунках 11.3.5 и 6 приведены результаты обработки статистики массивов N
и Z. Кроме статистики циклов рандомизации проводилась суммарная обработка всех
циклов по общей статистике фона и вершины импульсов. Результаты обработки для тех
же установок фильтров приведены в таблице 3.
Рис. 11.3.5. Статистика сигнала N
(Измерения по 50-ти циклам).
Рис. 11.3.6. Статистика сигнала Z
(50 циклов. Счет Dm по несглаженному М)
Таблица 3.
Статистика значений фона и вершины импульсов (50 циклов).
Массивы и условия обработки
Фон
Сигнал
Основной входной массив N
Дополнительный входной массив М
Массив Z, счет Dm по несглаженному М
Массив Z, счет Dm по сглаженному М
Массив N, сглаженный весовым окном
Сред. отсчет
Дисперсия
Сред. отсчет
Дисперсия
9.96
9,89
9,87
9,84
11,5
9.97
9,49
5,47
4,76
17,9
50,1
50,2
49,7
49,9
48,5
52,0
47,4
22,3
18,6
29,2
Результаты моделирования подтверждают преимущество СРД перед простыми
методами сглаживания. В числовой форме это наглядно проявляется в снижении
дисперсии отсчетов выходного массива Z при практическом сохранении средних значений
массива N и для фоновых отсчетов, и для амплитудных значений сигнала. При простом
сглаживании "развал" фронтов сигнала (подавление высокочастотных составляющих
спектра сигнала), как и должно быть при использовании низкочастотных фильтров,
вызывает снижение по отношению к исходному массиву средних значений в максимумах
и повышение фоновых значений сигнала, которое тем больше, чем больше окно весовой
функции. Этот эффект особенно отчетливо проявляется в интервале окна фильтра по обе
стороны от резких изменений сигнала.
При
отсутствии
дополнительных
массивов
М,
коррелированных
с
регуляризируемым массивом N, формирование прогнозных значений Мi может
производиться по ближайшим окрестностям текущих значений Ni в скользящем окне Ks.
При строго корректном подходе текущая точка Ni не должна включаться в число счета
прогнозных значений Mi, но, как показало моделирование, это практически не влияет на
результаты регуляризации. При прогнозировании Mi по всем точкам окна Ks массив М
формируется любым методом сглаживания из массива N, и все особенности работы СРД
по сглаженным массивам М, рассмотренные выше, остаются без изменений при условии
счета значений Dm в окне Кс по массиву М. Для исключения выбросов по обе стороны от
скачков полезного сигнала счет Dm как дисперсии прогнозных значений Mi необходимо
выполнять непосредственно по массиву N.
Фундаментальной особенностью СРД является возможность последовательной
многократной
фильтрации
данных,
при
которой
может
осуществляться
преимущественное повышение степени регуляризации данных с минимальными
искажениями формы полезного сигнала. Для выполнения последнего размер окна Кс счета
xi и Dm устанавливается минимальным (3-5 точек), а глубина регуляризации данных
(степень подавления шумов) устанавливается количеством последовательных операций
фильтрации (до 3-5 проходов). Пример регуляризации модельного массива N в три
прохода приведен на рис. 11.3.7.
Рис. 11.3.7. СРД одиночного массива N (3 прохода. Счет Dm по массиву n)
Для сравнения пунктиром на рисунке приведено сглаживание массива 5-ти
точечным фильтром Лапласа-Гаусса, который имеет коэффициент подавления шумов,
эквивалентный 3-х проходному СРД (см. рис. 11.3.9).
На рисунках 11.3.8 и 11.3.9 приведены результаты статистической обработки 3-х
проходной СРД для 25 циклов моделирования в сравнении с 1-м проходом и с 5-ти
точечным фильтром Лапласа-Гаусса (кривая n5).
Рис. 11.3.8. Статистика средних значений
(25 циклов. Счет Dm по массиву n)
Рис. 11.3.9. Статистика дисперсий
(25 циклов. Счет Dm по массиву n)
Количество проходов может ограничиваться в автоматическом режиме, например,
по среднеквадратическому значению корректирующих отсчетов zi = Ni - zi в каждом
проходе по сравнению с предыдущим проходом, которое сначала резко уменьшается за
счет сглаживания флюктуаций, а затем, в зависимости от динамики сигнальной функции,
стабилизируется или даже начинает увеличиваться за счет искажения самого сигнала.
Частотное представление работы СРД хорошо видно на рис. 11.3.10, где
приведены модули спектров рандомизированного сигнала в виде меандра (средние
значения в минимуме - 20, в максимуме - 100, 25 периодов по 40 отсчетов, всего 1000
отсчетов) и результатов его обработки СРД (окно Кс= 3, окно Кs= 3).
Рис. 11.3.10. Модули спектров модельных сигналов.
Рис.11.3.11. Участок спектра.
(1– входной массив N, 2– выходной массив Z, один цикл CРД,
3– выходной массив Z,три цикла CРД), 4 – массив нерандомизированного меандра).
Модуль спектра основного полезного сигнала (в данном случае чистого меандра)
представляет собой последовательность отдельных частотных гармоник по всему
диапазону спектра. В спектре рандомизированного меандра эти частотные гармоники
суммируются со спектром шума, статистически равномерно распределенным по всему
частотному диапазону (спектр шума на рисунке для наглядности сглажен). СРД
осуществляет подавление шумовых составляющих сигнала, практически не затрагивая
частотных гармоник меандра и не изменяя их по амплитуде. Последнее можно видеть на
рис. 11.3.11, где представлен отрезок спектра сигналов в высокочастотной части главного
диапазона в области одной гармоники меандра (частотные составляющие шума не
сглажены). При 3-х цикловом СРД высокочастотные составляющие шумов подавляются
практически на порядок.
СРД приведен на рис. 11.3.12
при
опробовании участка скважины, пересекающей пласты каменной соли, на содержание
сильвинита по гамма-излучению Калия-40. По данным геологического опробования
пласты сильвинита в толще вмещающих пород (галита) имеют достаточно резкие границы
и однородны по содержанию сильвинита в пределах пластов. Исходная диаграмма ГК
(детектор CsJ(Tl) со свинцовым фильтром толщиной 2 мм) и результаты фильтрации
исходного массива данных ГК с использованием СРД и низкочастотного фильтра с
весовым окном Лапласа-Гаусса приведены на рис. 11.3.12.
Пример практического использования
Рис. 11.3.12. Диаграммы ГК.
Результаты интерпретации диаграмм ГК симметричным деконволюционным
цифровым фильтром (окно 13 точек) приведены на рис. 11.3.13. Как видно на рисунке,
деконволюция по несглаженной диаграмме ГК дает существенные вариации содержания
сильвинита в пределах пластов. Применение низкочастотной фильтрации диаграммы ГК
снимает флюктуации содержания в пределах пластов, но существенно сглаживает
границы пластов. Использование СРД позволяет устранить этот недостаток.
Рис. 11.3.13. Результаты интерпретации диаграмм ГК.
В заключение отметим, что СРД может использоваться для регуляризации не
только ядернофизических данных, но и любых других числовых массивов непрерывных
измерений, если радиус их корреляции не менее 3-5 отсчетов. В качестве примера на рис.
11.3.14 приведена диаграмма акустического каротажа, зарегистрированная с шагом
дискретизации данных 20 см, сглаживание которой проведено СРД без потери
пространственного разрешения.
Рис. 11.3.14. Диаграмма акустического каротажа и результат ее обработки СРД
(5 циклов, Kc = Ks = 3, физическое окно 0.6 м).
11.3. СТАТИСТИЧЕСКАЯ ГРУППИРОВКА ПОЛЕЗНОЙ ИНФОРМАЦИИ.
Что касается аппаратных способов реализации СГПИ, то он может быть выполнен
в реальном масштабе времени, если информация представлена потоком импульсов и
основным информативным параметром является скорость следования импульсов.
Сущность аппаратной реализации заключается в статистической (близкой к
статистической) нормированной выборке импульсов из дополнительного потока m и их
суммировании с основным потоком n с заданием условий выборки по отношению частоты
следования импульсов в потоках. Полагая для непрерывного режима измерений M+1 = М,
перепишем выражение (5.2.20) с подстановкой значения в следующем виде:
z = N + (M/ x -N)·M x /(M x +D(M)).
(11.3.1)
Умножим левую и правую части выражения на нормировочный коэффициент
размножения выходного потока K = l+R:
Z = K·z= N + RN+(M/ x -N)·KM x /(M x +D(M).
(11.3.2)
Заменим отсчеты RN выборкой сигналов из потока m:
RN = РвМ,
(11.3.3)
где Рв - вероятность выборки сигналов из потока m. Если вероятность выборки сигналов
поддерживать равной значению
Pв = R/ x ,
(11.3.4)
то при этом будет иметь место
M/ x -N = РвM/R-N 0,
(11.3.5)
и соответственно для выражения (11.3.2) имеем:
(M/ x -N)·KM x /(M x +D(M) 0,
(11.3.6)
Z = N+PвM N+RN.
(11.3.7)
При статистической независимости величины х от частоты потоков n и m
приведенные выражения действительны при определении значения x как в целом по
пространству измерений, так и для скользящих окон текущих значений x по
определенным интервалам предшествующих измерений. Действительно и обратное
заключение: если по определенному интервалу измерений выражение (11.3.5) обращается
в нуль, то установленная вероятность выборки соответствует условию (11.3.4). На этом
принципе может проводиться аппаратная реализация СГПИ с автоматической адаптацией
к условиям измерений: управление процессом выборки импульсов из потока m и
направление их на суммирование с потоком n по сигналам обратной связи с устройства,
следящего за обращением в нуль выражения (11.3.5).
Особенности аппаратной реализации СГПИ с автоматической адаптацией под
условия измерений заключаются в следующем.
Значение вероятности выборки Рв не может быть больше 1. Отсюда из (11.3.3)
следует, что для любых интервалов измерений должно выполняться условие М ≥ RN, а
соответственно по всему пространству измерений должно выполняться условие x ≥ R,
чем и обуславливается выбор коэффициента R. Значение коэффициента R принципиально
ограничивает степень положительного эффекта СГПИ (kmax 1+R), в отличие от СРД,
где такого ограничения не имеется.
Относительная статистическая погрешность измерений выходного потока отсчетов
Z соответствует выражению (11.2.23) при условии постоянного значения величины Рв, т.е.
при установке значения Рв по среднему значению величины x в целом по пространству
измерений. При автоматической адаптации под условия измерений значение вероятности
Рв по текущему среднему значению отношения n/m определенного предшествующего
интервала измерений также является статистически флюктуирующей величиной с
дисперсией распределения (без учета изменений действительного значения х):
Dp = R2(n+m)n/(m3T),
(11.3.8)
где Т- интервал усреднения информации при определении текущего значения x .
Соответственно, дисперсия и средняя квадратическая погрешность текущих отсчетов Z:
Dz = DN+ PвDM+M2Dp = N+РвМ+М2Dр,
(11.3.9)
2
2
2
z = (N+РвМ+М Dр)/(N+РвМ) .
(11.3.10)
При постоянной экспозиции измерений положительный эффект возрастает с
увеличением значения Т:
k = K2/(K+R2(n+m)/mT).
(11.3.11)
2
kmax 1+R, z 1/(N+РвМ) при Т .
(11.3.12)
В общем случае, с учетом средней квадратической ошибки прогнозирования xi
значений xi для текущих точек измерений по значениям x в предшествующих интервалах
при Т > :
Dz = N+РвМ+M2(Dp+Pв2 xi2).
(11.3.13)
Формирование значения Рв на основе информации по средним значениям x интервалов измерений, предшествующих текущим, определяет СГПИ как динамическую
систему с соответствующей постоянной времени реакции на изменение условий
измерений. Учитывая, что, во-первых, для любой точки пространства измерений должно
выполняться условие m > nR, и, во-вторых, увеличение интервала Т приводит к
возрастанию времени реакции на изменение условий измерений, значение Т
целесообразно ограничивать величиной порядка (5-10) значений текущих экспозиций.
Чем меньше пространственная частота распределения х по отношению к распределению
n, тем большее значение Т допустимо.
Реализация систем СГПИ значительно облегчается при чисто практическом
ограничении целевой задачи: получение максимального положительного эффекта в
экстремально неблагоприятных условиях производства измерений (при низких значениях
регистрируемой плотности потока излучения, при высокой скорости измерений) с
вырождением положительного эффекта по мере снижения статистической погрешности
измерений в основном потоке. Так, например, если при скважинном гамма-опробовании
статистическая погрешность измерений основного потока сигналов в зонах с повышенной
интенсивностью излучения снижается до 2-3%, то ее дальнейшее уменьшение не имеет
практического смысла, т.к. основная погрешность каротажной радиометрической
аппаратуры обычно не превышает 5%.
Использование данного целевого ограничения позволяет применить формирование
параметра Рв не в скользящем окне временного или пространственного усреднения
информации, а по определенному зарегистрированному объему предшествующей
информации, т.е. с автоматической вариацией интервала усреднения информации и
постоянной регулирования Pв в зависимости от частоты потоков сигналов, при этом объем
информации формирования Pв может задаваться с учетом характера вариаций величины
x и допустимого значения динамической погрешности измерений.
Для реализации такой возможности преобразуем выражение (11.3.5) по интервалу
усреднения t к виду:
Pвmt/R-nt+Q = q,
(11.3.14)
Pв = nR/m = q/,
(11.3.15)
q Q при t ,
где Q- средний уровень смещения числового эквивалента сигнала обратной связи системы
АРВ - автоматического регулирования вероятности выборки Рв,
при котором
обеспечивается выполнение равенства (11.3.15), - коэффициент пропорциональности
преобразования цифрового сигнала АРВ в сигнал Рв. Дифференциальное уравнение для
системы АРВ:
dq/dt = n-mq/R.
(11.3.16)
Решение дифференциального уравнения при начальных условиях t = 0 и q = О
(переходная функция АРВ):
q = R(n/m) [l-exp(-mt/R)].
(11.3.17)
Pв = R(n/m) [l- exp(-mt/R)] = R(n/m) [1- exp(-nt/q)].
(11.3.18)
Как видно из этих выражений, значение сигнала обратной связи АРВ
пропорционально отношению (n/m) частот потоков, а постоянная времени АРВ R/m
прямо пропорциональна значению коэффициента преобразования при обратной
пропорциональности от значения частоты дополнительного потока m, равно как и, с
учетом (11.3.15), прямо пропорциональна текущему значению сигнала обратной связи q
при обратной пропорциональности от значения частоты основного потока n. Первое
полностью эквивалентно второму при (n/m) const и q = Rn/m Q. В первом
приближении, с использованием выражения (11.3.8) и эквивалентности значения
статистических флюктуаций при Т≈2 для скользящего прямоугольного временного окна
и окна интенсиметра с экспоненциальной переходной функцией, для относительных
флюктуации значения Рв получаем:
р2 = (n+m)/(2Rn)= (n+m)/(2qm).
(11.3.19)
Выражение действительно для прямого измерения 2-интенсиметром отношения
(n/m) и является максимальной оценкой. Для более точной оценки следует учитывать, что
в данном случае интенсиметр является устройством с отрицательной обратной связью по
цепи АРВ, что несколько уменьшает значение флюктуации. Точная оценка может быть
проведена с использованием формулы Кэмпбелла для дисперсии случайной величины x(t),
образованной сложением импульсов пуассоновского потока [5], раздельно для потока n
при m = const и потока m при n = const, с последующим сложением квадратов
относительного среднего квадратического значения флюктуации. Так, для схемы,
приведенной ниже, получено значение р2 ≈ (R+1)m/(2nR2).
При выбранном для пространства измерений значении коэффициента R ≤ (m/n)min с
использованием выражения (11.3.19) параметры системы АРВ (коэффициент и среднее
значение Q для средней по пространству величины отношения n/m) могут
устанавливаться под заданное значение допустимых флюктуаций вероятности выборки
импульсов Рв:
≤ (l+(m/n)max)/(2Rp2).
(11.3.20)
В процессе измерений АРВ осуществляет непрерывную адаптацию под текущие
условия измерений (nq, m mR, Pв q/) с регулированием текущего значения Pв
по объему информации q = (n/m)R = n предшествующего интервала измерений путем
соответствующего изменения постоянной времени интегрирования этой информации в
зависимости от изменения частот потоков сигналов. При n/m const последнее имеет
абсолютный характер: р const, (l/n + l/m)/(2p2).
Следует отметить, что во многих методах геофизики существуют достаточно
благоприятные условия использования как СГПИ, так и СРД. Так, например,
применительно к скважинному гамма-опробованию с извлечением дополнительной
информации из низкоэнергетической части спектра излучения условия достаточно точной
реакции на изменения параметра x по стволу скважины являются весьма хорошими, т.к.
основной фактор вариации значений x - эффективный атомный номер среды, изменяется в
небольшом диапазоне с низкой пространственной частотой вариаций, причем в зонах
расположения активных пород, где требуется наиболее высокая точность интерпретации
результатов измерений и возможны значительные изменения атомного номера пород, за
счет увеличения плотностей потоков излучения постоянная времени АРВ будет
существенно уменьшаться, а пространственная разрешающая способность измерений
соответственно увеличиваться. Аналогичные условия характерны, как правило, и для
других методов ядерной геофизики.
Пример исполнения системы СГПИ
для двух импульсных потоков сигналов
приведен на рис. 11.3.1. Функциональная схема СГПИ содержит реверсивный счетчик
импульсов 1, на вход суммирования которого подаются импульсы основного потока n, а
на вход вычитания - импульсы дополнительного потока m, предварительно проходящие
через схему выборки импульсов 3 и счетчик-делитель частоты следования импульсов 4 с
коэффициентом пересчета R.
Информация
о
состоянии
счетчика 1 (сигнал q) с выходов
счетчика
подается
на
блок
формирования
сигнала
выборки
импульсов
3.
В
простейшем
случае
этот
Рис. 11.3.1. Базовая функциональная схема СГПИ.
блок
может
представлять
собой
1- реверсивный счетчик импульсов, 2- блок формирования
сигнала выборки импульсов, 3- схема выборки импульсов, 4пороговое устройство (по коду числа Q),
счетчик-делитель частоты на R, 5- блок суммирования потоков
открывающее схему 3, однако выборка в
импульсов.
этом случае имеет характер, близкий к
статистическому, только при достаточно малых различиях частоты потоков n и m/R
(порядка n<m/R<1.5n). По мере роста отношения m/n независимость выборки от
импульсов потока n в такой схеме вырождается, и требуются дополнительные устройства
адаптации под текущие условия измерений. В общем случае блок 3 выполняется в виде
пересчетной схемы с регулируемым коэффициентом пересчета импульсов потока m в
интервале 0<Рв<1 по значению кода q с выхода счетчика 1 (например, с использованием
статистических пересчетных схем, выполненных в виде генератора случайных кодов со
схемой формирования сигнала выборки очередного импульса из потока m путем
сравнения на больше-меньше текущих кодов с выхода счетчика 1 и с выхода генератора
кодов).
Импульсы основного потока n и импульсы выборки из потока m, частота которых
равна Рвm = R·n, поступают на вход блока 5 суммирования потоков сигналов.
Интенсивность потока импульсов на выходе блока 5 равна z = n+Рвm = (1+R)n. Блок 5
может содержать пересчетную схему с коэффициентом K=(1+R), при этом выходной
поток будет приводиться к масштабу основного потока n и появляется возможность
синхронного переключения коэффициентов пересчета схем 4 и 5 под различные условия
измерений, при этом установка оптимального значения коэффициента R может быть
переведена в режим автоматической с управлением по текущему значению (в
определенном интервале) информационного кода схемы 1. Альтернативное решение подача на вход суммирования схемы 5 потока импульсов с выхода схемы 4, при этом
частота потока z будет всегда в 2 раза больше потока n.
Попутно отметим, что при выводе информации q = R(n/m) в цифровом коде со
счетчика 1 данная схема может выполнять функции универсального цифрового
интенсиметра: средней частоты импульсов (n-var, m-const от генератора тактовой
частоты), среднего временного интервала между импульсами (m-var, n-const) и отношения
частот n/m двух статистически распределенных потоков импульсов.
Адаптивное управление сложными
системами
ВВЕДЕНИЕ
Развитие теории и практики АСУ связано с количественным и качественным
расширением сферы их применения. Этот процесс является многоплановым
и идет одновременно по различным направлениям. Одним из наиболее
перспективных является создание адаптивных АСУ сложными системами
(ААСУ СС).
На практике создание таких АСУ сдерживается недостаточной
разработанностью теории, стандартных, проверенных и отработанных на
практике методов их синтеза, а также недостатком соответствующих
инструментальных программных средств.
ГЛАВА 1. ОСНОВНАЯ ПРОБЛЕМА И КОНЦЕПЦИЯ ЕЕ
РЕШЕНИЯ
1.1. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ.
ОБЪЕКТ И ПРЕДМЕТ ИССЛЕДОВАНИЯ
При управлении каким–либо объектом, в том числе без участия человека,
обеспечивается постоянство определенной физической или иной величины,
характеризующей состояние объекта, или изменение этой величины в соответствии с
некоторым законом на основании конкретной информации о состоянии объекта и
окружающей среды. Осуществляется это с помощью автоматизированной системы
управления (АСУ).
Объектом исследования в данной работе являются автоматизированные системы
управления (АСУ).
АСУ состоит из двух основных частей: объекта управления и
управляющего устройства. Объектом управления может быть любое
управляемое техническое устройство или какой–либо технологический
процесс.
Состояние объекта управления зависит от приложенных к нему воздействий g(t) и от
собственных параметров, поэтому характеризуется выходной величиной y(t).
Воздействие g(t), поступающее на вход управляющего устройства и содержащее
информацию о требуемом значении y(t), называется задающим воздействием.
Воздействие z(t), поступающее от управляющего устройства на вход объекта для
обеспечения в нем желаемого процесса, называется управляющим воздействием.
Воздействие f(t), приложенное к объекту и вызывающее отклонение управляемого
параметра от заданного значения, называется возмущающим воздействием (помехой).
На рис. 1.1 приведена классическая функциональная схема АСУ [13], на которой
показаны основные элементы управляющего устройства (УУ).
Задающее воздействие g(t), которое является входным сигналом АСУ и определяет
требуемый закон изменения выходного сигнала y(t), поступает на чувствительный
элемент (ЧЭ). Кроме того на этот элемент подаются сигналы обратной связи y(t) и
возмущающего воздействия f(t).
С выхода ЧЭ сигнал x(t), который является функцией воздействия {x, y, f} и
характеризует ошибку (рассогласование) АСУ, усиливается усилителем (У) и поступает
на исполнительный механизм (ИМ).
Рис. 1. 1. Функциональная схема АСУ
ИМ вырабатывает и подает на объект управления (ОУ) управляющее воздействие
z(t).
Иногда при формировании управляющего воздействия кроме сигнала ошибки
учитываются его производная и интеграл.
Часто для обеспечения требуемых статических и динамических характеристик
системы используются корректирующие устройства: последовательные (КУ1) и
параллельные (КУ2).
В состав АСУ могут входить еще и специальные элементы для согласования
отдельных частей системы, а также вычислительные устройства для реализации
алгоритма работы управляющего устройства.
Предметом исследования данной работы являются вопросы создания и применения
адаптивных АСУ сложными системами (ААСУ СС).
Очевидно, АСУ является более общим понятием, чем ААСУ СС. Поэтому в
содержательной постановке задачи синтеза ААСУ имеется ряд особенностей и
специфических проблем, возникающих именно тогда, когда объектом управления
является сложная система.
Перед содержательной постановкой задачи синтеза ААСУ СС рассмотрим вопрос о
месте данных систем в общей классификации АСУ.
1.2. КЛАССИФИКАЦИЯ СИСТЕМ
АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ
Классификация АСУ существенным образом зависит от критериев классификации.
По виду используемой управляющим устройством информации различают
разомкнутые и замкнутые АСУ: в разомкнутых системах отсутствует обратная связь
между выходом объекта управления и входом управляющего устройства. В таких
системах управляемая величина не контролируется. При наличии обратной связи объект
управления и управляющее устройство образуют замкнутый контур, обеспечивающий
автоматический контроль за состоянием объекта управления.
По характеру изменения задающего воздействия АСУ можно отнести к
следующим видам:
автоматической стабилизации, задающее воздействие в которых постоянно; эти
системы предназначены для поддержания постоянства некоторого физического
параметра (температуры, давления, скорости вращения и т.д.);
- программного управления, задающее воздействие в которых изменяется по какому–
либо заранее известному закону (например, по определенной программе может
осуществляться изменение скорости вращения электропривода, изменение
температуры изделия при термической обработке и т.д.);
- следящие, задающее воздействие в которых изменяется по произвольному, заранее
неизвестному закону (используются для управления параметрами объектов
управления при изменении внешних условий).
В последние годы все большее значение приобретают адаптивные АСУ,
характеризующиеся действием на объект управления каких–либо абсолютно неизвестных
факторов. В результате возникает необходимость решения задачи управления в условиях
неопределенности исходных данных для принятия решения об управляющих
воздействиях. Эти системы могут приспосабливаться к изменениям внешней среды и
самого объекта управления, а также улучшать свою работу по мере накопления опыта, т.е.
информации о результатах управления.
-
В свою очередь адаптивные АСУ делятся на:
оптимальные, которые обеспечивают автоматическое поддержание в объекте
управления наивыгоднейшего режима;
- самонастраивающиеся, параметры объекта управления у которых не остаются
неизменными, а преобразуются при изменении внешних условий;
- самоорганизующиеся, алгоритм работы у которых не остается неизменным, а
совершенствуется при изменении параметров объекта управления и внешних условий;
- самообучающиеся, которые анализируют накопленный опыт управления объектом и
на основании этого автоматически совершенствуют свою структуру и способ
управления.
По характеру действия АСУ подразделяют на непрерывные и дискретного действия.
В непрерывных АСУ при плавном изменении входного сигнала также плавно изменяется
и выходной сигнал. В дискретных АСУ при плавном изменении входного сигнала
выходной сигнал изменяется скачкообразно. Методы управления, основанные на
применении цифровой техники, всегда приводят к дискретным АСУ.
По характеру изменения параметров сигналов АСУ можно разделить на линейные и
нелинейные, стационарные и нестационарные. По количеству самих параметров АСУ
являются одномерными или многомерными (многопараметрическими).
-
Необходимо отметить, что классификацию АСУ можно построить и на основе
других критериев, например, можно классифицировать АСУ по физической сущности
системы или ее основных звеньев, по мощности исполнительного устройства и т.д.
Каждый из упомянутых способов классификации АСУ чаще всего является независимым
от остальных. Это означает, что каждый из них можно представить как шкалу в
многомерном фазовом пространстве, тогда конкретным АСУ в этом пространстве будут
соответствовать точки или определенные области.
1.3. СОДЕРЖАТЕЛЬНАЯ ПОСТАНОВКА ЗАДАЧИ
СИНТЕЗА
АДАПТИВНЫХ АСУ СЛОЖНЫМИ СИСТЕМАМИ
Если объект управления представляет собой сложную систему, то будем называть
его сложным объектом управления (СОУ).
Введем понятие: цикл управления. Под циклом управления будем
понимать периодически повторяющийся цикл в АСУ, состоящий из
следующих видов работ:
измерение параметров текущего (исходного) состояния сложного объекта управления;
идентификация состояния СОУ;
прогнозирование поведения СОУ при условии отсутствия управляющего воздействия
(изучение тенденций);
- выработка управляющего воздействия;
- оказание управляющего воздействия на СОУ.
Моменты времени t изменяются дискретно: каждый момент времени соответствует
определенному циклу управления.
Пусть состояние СОУ в момент времени t характеризуется вектором параметров
p соу (t ) , а состояние окружающей среды в этот же момент времени – вектором
параметров: pсреды (t ) .
-
Управляющие факторы, воздействующие на поведение СОУ, разделим на
две группы:
-
воздействие окружающей среды в момент времени t , не зависящее от человека:
f среды ( j , t ) ;
-
воздействие управляющей подсистемы АСУ в момент времени t , контролируемое
человеком: f АСУ ( j , t ) .
Состояния СОУ в моменты времени t обозначим S (i, t ) , подмножество целевых
состояний – T (i, t ) .
Синтез АСУ СС в основном сводится к разработке математической модели СОУ,
которая должна обеспечить генерацию такого набора управляемых факторов f АСУ ( j , t ) ,
фактическое воздействие которых на СОУ в очередной цикл управления с максимальной
возможной вероятностью переведет его в заранее заданное целевое состояние T (i, t ) .
При этом модель должна учитывать:
-
текущее состояние СОУ и траекторию, по которой он перешел в это состояние
(последовательность предыдущих состояний);
влияние имеющихся и прогнозируемых неконтролируемых факторов среды на
поведение СОУ (предпосылки и тенденции);
предыдущий опыт реального влияния управляющих факторов на поведение СОУ,
находящийся в тех или иных состояниях (адаптивность) и определенных внешних
условиях.
1.4. НЕОПРЕДЕЛЕННОСТЬ ИСХОДНОЙ
ИНФОРМАЦИИ
КАК ОСНОВНАЯ ПРОБЛЕМА ПРИ СИНТЕЗЕ
АДАПТИВНЫХ АСУ СЛОЖНЫМИ СИСТЕМАМИ
Во многих случаях проектирования и эксплуатации АСУ обнаружилось
[333], что принятие априори некоторой неизменной математической
модели объекта управления неадекватно действительному положению
вещей. В одних случаях это результат того, что из-за сложности процессов,
протекающих в объекте управления, получение его математической
модели на основе известных физических или химических законов
оказывается практически неразрешимой задачей, в других – это может
быть результатом того, что в процессе эксплуатации АСУ под
воздействием внешних или внутренних неконтролируемых факторов
(возмущений) происходит изменение самого объекта управления.
Традиционно система определяется как сложная [273], если для
построения ее адекватной модели недостаточно априорной информации.
Это означает, что поведение сложной системы существенным образом
зависит от факторов, о влиянии которых практически ничего неизвестно.
Поэтому в случае, когда объектом управления является сложная система
(СС), о ее модели можно сказать лишь то, что неизвестны не только
коэффициенты или параметры аналитических выражений, описывающих
объект управления, но и даже сам вид этих выражений. Поэтому
построение содержательной аналитической модели сложного объекта
управления (СОУ) очень проблематично и, по–видимому, в этом случае
может идти речь лишь о построении моделей других классов.
Таким образом, основная проблема при создании адаптивных АСУ
сложными системами (ААСУ СС) состоит в выборе или разработке
математической модели, обеспечивающей настройку на специфику
объекта управления за счет использования апостериорной
информации о нем и среде, а также за счет дополнительной
информации, поступающей уже в процессе эксплуатации системы.
Первым этапом на пути конкретизации представлений об этой модели,
позволяющей наиболее адекватно описать сложный объект управления,
является определение ее класса.
Примечательно, что и классические, хорошо изученные "детерминистские"
объекты управления в общем случае не могут рассматриваться как
совершенно неизменные. На некоторых этапах эксплуатации или в
некоторых ситуациях они могут вести себя как сложные стохастические
системы. С середины 80–х годов школа И.Пригожина развивает подход,
согласно которому в развитии любой системы (в том числе и человека)
чередуются периоды, в течение которых система ведет себя то как "в
основном детерминированная", то как "в основном случайная" [273].
Естественно, реальная система управления должна устойчиво управлять
объектом управления не только на "детерминистских" участках его
истории, но и в точках, в которых его дальнейшее поведение становится в
высокой степени неопределенным и непредсказуемым. Уже одно это
означает, что необходимо разрабатывать подходы к управлению
системами, в поведении которых иногда или постоянно присутствует
существенный элемент случайности или того, что в настоящее время
математически описывается как случайность, а в действительности
(например, у сознательных существ) вполне может оказаться проявлением
свободы воли.
1.5. КЛАССИФИКАЦИЯ СИСТЕМ И
АВТОМАТИЗАЦИЯ
УПРАВЛЕНИЯ СЛОЖНЫМИ СИСТЕМАМИ
Прежде всего система – это целостная совокупность некоторых элементов, не
сводящаяся к простой сумме своих частей, т.е. представляющая собой нечто большее, чем
просто сумму частей. Это нечто, отсутствующее в частях системы, взятых самих по себе,
и совершенно необходимое, чтобы элементы образовали систему, представляет собой
интегрирующее начало.
Интегрирующее начало может быть как объективным, так и
субъективным, а системы, соответственно, естественными и
искусственными. Искусственная система есть средство достижения цели.
Но и естественные, например, экологические системы, человек, как
правило, рассматривает с точки зрения того, что они могут ему дать или
какими они должны быть, чтобы обеспечить человеку определенные
желательные условия, т.е. опять же с точки зрения соответствия
определенным целям.
Различные модели систем отличаются тем, насколько полно в этих
моделях отражены знания разработчиков модели о внутреннем строении
моделируемых систем, и насколько эти модели являются подходящими для
применения с точки зрения достижения целей АСУ.
Простейшей (полностью феноменологической) моделью системы является модель
"черного ящика" [273]. Так называют систему, о которой внешнему наблюдателю
доступны только лишь входные и выходные параметры, а внутренняя структура системы
и процессы в ней неизвестны. Входные параметры можно рассматривать как
управляющие воздействия, а желательные значения выходных – как цель управления. Ряд
важных выводов о поведении системы можно сделать, наблюдая только ее реакцию на
воздействия, т.е. наблюдая зависимости между изменениями входных и выходных
параметров. Такой подход открывает возможности изучения систем, устройство которых
либо совершенно неизвестно, либо слишком сложно для того, чтобы можно было по
свойствам составных частей и связям между ними сделать выводы о поведении системы в
целом. Поэтому понятие "черный ящик" широко применяется при решении задач
идентификации и моделировании реакции на управляющее воздействие в АСУ сложными
объектами управления.
Важно понимать, что "черный ящик" представляет собой именно систему, причем в
общем случае, сложную систему. Из этого следует очень важный вывод: оптимизировать
какой–либо отдельно взятый выходной параметр нельзя, так как это может привести к
уничтожению всей системы, т.е. выходные параметры необходимо рассматривать
системно, т.е. в единстве, комплексе.
Несмотря на свою кажущуюся простоту, построение модели "черного ящика" не
является тривиальной задачей. Дело в том, что любая реальная система взаимодействует
со средой бесчисленным множеством способов. Строя модель системы, из этого
бесчисленного множества связей отбирают конечное их число и включают их в список
входов и выходов. Критерием отбора при этом является целевое назначение модели,
существенность той или иной связи для достижения цели. То, что существенно и важно,
включается в модель, а то, что не существенно и не важно – не включается.
Но проблема как раз и заключается в том, что в действительности заранее никому не
может быть точно известно, какие входные параметры оказывают существенное влияние
на выходные целевые параметры, а какие нет. Это можно узнать, статистически
исследовав эволюцию некоторого объекта в течение длительного времени, что
проблематично, либо изучив достаточное количество аналогичных объектов,
находящихся на различных стадиях своей эволюции, т.е. вариабельных конкретных
"мгновенных" реализаций аналогичных объектов управления.
Но даже если такая информация имеется, то математически ее обработать, например
с применением факторного анализа, также далеко не просто, так как обычно размерность
реальных задач намного (на несколько порядков) превосходит возможности стандартных
статистических методов и пакетов.
Более развитой, чем "черный ящик" является модель состава системы, в
которой перечисляются составляющие ее элементы и подсистемы.
Совокупность необходимых и достаточных для достижения целей
управления элементов и подсистем с определенными отношениями между
ними называется структурой системы.
Суммируя модели "черного ящика", состава и структуры, по мнению авторов, можно
дать следующее синтетическое определение системы: "Система есть совокупность
взаимосвязанных элементов, обособленная от среды и взаимодействующая с ней как
единое целое для достижения определенной объективной или субъективной цели".
Существуют различные подходы к классификации систем:
-
по происхождению: искусственные, смешанные и естественные;
по степени изученности структуры (наличию информации): "черный ящик",
непараметризованный класс, параметризованный класс, "белый ящик";
по способу управления: управляемые извне, самоуправляемые, с комбинированным
управлением;
по ресурсной обеспеченности управления: энергетические ресурсы (обычные и
энергокритичные), материальные ресурсы (малые и большие), информационные
ресурсы (простые и сложные).
При недостатке априорной информации о сложном объекте управления
построение его содержательной модели затруднительно. В этих
условиях, по мнению авторов, возможно применить модель "черного
ящика", которая предполагает минимум знаний о структуре и связях
входных и выходных параметров моделируемого объекта.
При построении этой модели выходные параметры определяются исходя
из целей управления, а проблема выбора входных параметров, значимо
влияющих на выходные, в принципе может решаться различными
методами, например, такими как: многофакторный анализ,
дискриминантный анализ, методы проверки статистических гипотез,
методы теории информации.
В данной работе предлагаются различные варианты классификации
параметров, в зависимости от того, какие состояния объекта управления и
среды они характеризуют и в какой степени они зависят от человека.
Например, параметры могут быть разделены на четыре группы,
характеризующие:
1. Предысторию объекта управления и окружающей среды.
2. Характеристику актуального состояния объекта управления (которое рассматривается
как исходное состояние СОУ) и среды.
3. Не зависящие от человека факторы.
4. Зависящие от человека факторы (управляющие воздействия на объект управления).
Эта классификация позволяет изучить влияние на достижение целей
управления каждой из перечисленных групп факторов и выделить
наиболее существенные факторы как в каждой группе, так и по всем
группам в целом. Для этой цели в данном исследовании предлагается
применить итерационные методы снижения размерности пространства
признаков с переменным шагом, основанные на максимизации среднего
количества информации, которое система получает при предъявлении ей
признаков объектов обучающей и распознаваемой выборки.
Рассмотрим соотношение понятия "фактор", широко применяющегося в настоящем
исследовании, и понятия "управляющее воздействие", традиционного для теории АСУ. В
данном исследовании с единых позиций рассматриваются все причины, влияющие на
переход СОУ в различные состояния, в том числе целевые. Конечно, это прежде всего
управляющие воздействия. Но это и факторы среды, причем не только актуальные, но и
будущие (прогнозируемые). Это и состояния самого СОУ, как прошедшие (СОУ
рассматривается как автомат с памятью), так и актуальные, а также прогнозируемые.
Среди всех этих факторов есть и зависящие от человека, которые он может использовать в
качестве управляющих воздействий, а также и не зависимые от него, без учета которых,
однако, управление СОУ станет менее надежным. Все эти факторы и рассматриваются в
предлагаемой модели. Поэтому естественно, что в данном исследовании понятие фактор
толкуется более широко, чем термин "управляющее воздействие".
Более пристального внимания заслуживает также классификация систем по
ресурсной обеспеченности управления. Для того, чтобы модель реально заработала, или,
как говорят была актуализирована, необходимы затраты различных ресурсов, прежде
всего энергетических, материальных, информационных, финансовых, а также других.
Конечно, ресурсная обеспеченность меняется с течением времени, что связано
прежде всего с совершенствованием компьютерной техники и информационных систем, а
также зависит от возможностей конкретных исследователей и разработчиков. Поэтому
классификация этого типа, безусловно, является относительной. Несмотря на это,
подобная классификация имеет практическую ценность.
Большой называется система, поведение которой определяется всей
совокупностью ее элементов, взаимодействующих между собой, ни один из которых не
является определяющим [112, 273]. В рассматриваемом контексте термин "большая"
означает не пространственные размеры системы, а большое количество ее элементов. При
моделировании больших систем возникает проблема высокой размерности описания.
Например, если применяется многофакторная модель, то вычислительные и понятийные
(связанные с интерпретацией) трудности возникают уже при количестве факторов от семи
до десяти. В то же время многие реальные задачи требуют учета многих сотен и даже
тысяч различных факторов.
Известны два способа перевода больших систем в разряд малых: использование
более мощных вычислительных средств (компьютеров и программных систем) либо
осуществление декомпозиции многомерной задачи на совокупность слабо связанных
задач меньшей размерности (если характер задачи это позволяет). Если существует
возможность сгруппировать элементы системы в незначительное количество подсистем,
каждая из которых оказывает вполне определенное существенное влияние на поведение
системы в целом, а с другими подсистемами мало взаимодействует, то этим самым
описание функциональной структуры системы существенно упрощается.
На практике чаще всего исследователь самостоятельно решает неформализуемым
путем, какие факторы он будет исследовать, а какие нет.
Напомним ключевое для нашего изложения определение сложной системы.
Сложной называется система, адекватное моделирование которой требует учета
отсутствующей или недоступной информации [273]. Необходимо специально отметить,
что данное определение сложной системы считается классическим. Сложный объект
управления (СОУ) – это объект управления, являющийся сложной системой. В контексте
данного исследования несущественно, является ли СОУ динамическим, статическим,
стохастическим и т.д. Но эти варианты порождают частные случаи, некоторые из которых
конкретизируются в исследовании.
Если управление приводит к неожиданным, непредвиденным или нежелательным
результатам, т.е. отличающимся от ожидаемых (прогнозируемых) в соответствии с
моделью, то это объясняется недостатком существенной информации, что порождает
неадекватность модели и интерпретируется как сложность системы. Таким образом,
простота или сложность системы относительна и указывает на достаточность или
недостаточность информации о системе в действующей модели этой системы, т.е. связана
с возможностью построения адекватной модели.
Между большими и сложными системами имеется много общего: очень часто
большие системы одновременно являются и сложными. Но есть и существенное различие
между ними: адекватное моделирование больших систем оказывается возможным при
удовлетворении высоких требований к инструментам обработки (компьютерам и
программным системам), тогда как при моделировании сложных систем возникают более
фундаментальные проблемы, связанные с недостатком значимой информации.
1.6. ТРАДИЦИОННЫЕ ПУТИ РЕШЕНИЯ
ОСНОВНОЙ ПРОБЛЕМЫ,
ИХ ОГРАНИЧЕНИЯ И НЕДОСТАТКИ
1.6.1. ИДЕНТИФИКАЦИЯ ТЕКУЩЕГО СОСТОЯНИЯ
ОБЪЕКТА УПРАВЛЕНИЯ
Обычно понятия "параметры объекта управления" и "состояния объекта
управления" рассматриваются как синонимы, причем это обстоятельство
специально не уточняется. По этой причине считается, что АСУ управляют
состояниями объекта управления, хотя фактически под этим понимается
лишь управление его параметрами.
Решение об управляющем воздействии принимается в таких АСУ как бы
"вслепую", т.е. без формирования целостного образа объекта управления и
окружающей среды в их текущем состоянии, а также без прогнозирования
развития среды и реакции объекта управления на те или иные управляющие
воздействия на него, действующие одновременно с прогнозируемым
влиянием среды.
В случае, когда параметры объекта управления детерминистским и вполне
однозначным образом связаны с его состояниями, такой подход является
адекватным.
В данной работе предлагается рассматривать параметры объекта
управления как внешнее проявление его состояния, так как в общем случае
объект управления представляет собой сложную систему, в которой связь
между наблюдаемыми параметрами и состоянием системы имеет сложный и
неоднозначный характер.
Поэтому, по мнению авторов, когда объект управления является
сложной системой,
подход к управлению в АСУ, основанный на
управлении по параметрам, является неадекватным. В этом случае
выработка управляющего воздействия должна осуществляться на основе
данных о текущем состоянии объекта управления.
Итак, в общем случае задача идентификации состояния объекта на основе
информации о его параметрах представляет собой типичную задачу
распознавания образов. Следовательно, в случае СОУ идентификация его
состояния осуществляется в АСУ путем решения задачи распознавания
образов и чувствительный элемент (ЧЭ), изображенный на рис. 1.1,
преобразуется из системы измерения значений параметров в систему их
измерения и интеллектуального анализа.
Поясним эти выводы на наглядных примерах.
1.6.1.1. Пример 1–й (технический)
Рассмотрим автономную комбинированную фотоветроэлектроэнергетическую
установку (ФВЭУ), также представляющую собой типичный пример сложной
технической системы.
ФВЭУ включает следующие подсистемы (установки), изображенные на рис. 1.2:
Рис. 1. 2. Принципиальная схема ФВЭУ
-
фотоэлектроэнергетическую установку (ФЭУ);
ветроэлектроэнергетическую установку средней мощности (ВЭУ);
аккумуляторную батарею (накопитель);
потребитель, состоящий из нагрузок с двумя уровнями приоритетности;
систему автоматизированного управления (САУ).
Текущее состояние энергоресурсов системы определяется текущей
мощностью первичных энергоресурсов, а также запасом энергии в
накопителе. Потребность в мощности энергоустановки определяется
потребителем, включающем нагрузки различной приоритетности.
Целью САУ является наиболее полное и бесперебойное снабжение потребителей
электроэнергией при ее неравномерном поступлении в условиях нормального
эксплуатационного режима всех элементов энергосистемы. Таким образом, цель САУ
дуальна: это наиболее полное и качественное обеспечение как текущих, так и будущих
потребностей потребителя в электроэнергии [318].
Цель управления достигается путем выбора наиболее рационального режима
энергораспределения ФВЭУ:
1. При избытке вырабатываемой электроэнергии подключаются все потребители и
накопитель, если он разряжен.
2. При недостатке вырабатываемой электроэнергии: подключаются все группы нагрузок
или нагрузки, имеющие наивысший приоритет, накопитель при этом может работать
как на разряд, так и на заряд, в зависимости от его состояния и прогноза поступления
первичных энергоресурсов: если прогноз положительный, накопитель использовать
допустимо, если нет – то это нежелательно.
Выбор режима энергораспределения осуществляется на основе анализа информации о текущем состоянии ФВЭУ и будущем
состоянии первичных энергоресурсов.
Информация, характеризующая текущее состояние ФВЭУ:
- потребность в электроэнергии в разрезе выделенных групп нагрузок;
- выходная мощность ФЭУ;
- выходная мощность ВЭУ;
- резерв накопителя.
Информация, характеризующая будущее состояние первичных возобновляемых
энергоресурсов:
- краткосрочный прогноз мощности солнечного светового потока;
- краткосрочный прогноз мощности ветра.
В силу низкой предсказуемости и высокой динамичности как потребляемой
мощности, так и поступления возобновляемой энергии, а также зависимости последней от
погоды, времени суток и региона, алгоритм управления энергораспределением ФВЭУ не
может быть разработан в готовом виде при изготовлении системы и должен обладать
высокой степенью интеллектуальности и адаптивности.
Необходимо отметить, что несмотря на кажущуюся простоту автономных ФВЭУ она
является обманчивой и в настоящее время не разработано оптимального алгоритма
управления энергораспределением для этих систем в условиях дефицита вырабатываемой
мощности.
1.6.1.2. Пример 2–й (медицинский)
В качестве типичного и очевидного примера сложной системы возьмем
человека – пациента. Тогда систему "врач–пациент" можно рассматривать
как адаптивную систему управления сложной системой, цель которой
состоит в переводе пациента из некоторого текущего состояния "болезнь",
более или менее далекого от оптимального, в некоторое будущее
состояние "здоровье", более близкое к оптимальному, причем это
осуществляется с помощью лечебных управляющих воздействий.
Целевые состояния сложной системы в нашем примере представляют
собой подмножество пространства будущих состояний, в которых пациент
более или менее здоров.
Входными параметрами сложной системы являются:
-
история болезни пациента и его биография (траектория перехода пациента в текущее
состояние);
факторы внешней среды;
лечебные воздействия врача.
Выходными параметрами сложной системы в нашем примере являются
симптомы и синдромы (комплексы взаимосвязанных симптомов), т.е.
клиническая картина.
Принцип управления по параметрам, широко применяемый в АСУ простыми
системами, не является адекватным в случае сложных объектов управления. Дело в том,
что в случае сложных систем задача измерения выходных параметров перерастает в
задачу идентификации состояния сложной системы по ее параметрам, т.е. в задачу
распознавания образов. В нашем примере управление по выходным параметрам
соответствует ситуации, когда врач вместо того, чтобы лечить больного от заболевания,
являющегося причиной высокой температуры, просто даст ему жаропонижающее. Вместо
лечения болезни и устранения ее причин у пациента подавляются внешние проявления
болезни, т.е. происходит "залечивание" симптомов. Это "симтоматическое лечение"
считается допустимым только в крайних случаях ради облегчения состояния больного и,
если этим "лечение" и ограничивается, то обычно приводит к негативным последствиям.
Сейчас уже общепризнанно, что лечить надо не болезнь, и тем более не симптомы, а
самого больного.
Таким образом, перед тем, как принимать конкретные меры по лечению больного
врач должен сначала поставить ему диагноз. От диагноза прежде всего и зависит
правильный выбор плана лечения, т.е. конкретные лечебные воздействия и их
порядок. Без правильного диагноза не может быть адекватного лечения.
Диагностика, т.е. нозологическая идентификация, осуществляется на основе
симптоматики (клинической картины) с учетом данных истории болезни, отражающей
предысторию больного, а также факторов внешней среды (например пациент проживает в
районе с неблагополучной экологией, имеет вредную профессию или проблемы в семье).
В дальнейшем изложении второй технический пример (с ФВЭУ) будет
конкретизирован до уровня методологии, методики и алгоритма
синтеза адаптивной АСУ СС, а также до уровня численного
примера.
1.6.2. ПРИНЯТИЕ РЕШЕНИЙ
ОБ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЯХ
В модели сложного объекта управления, сформированной в адаптивной АСУ,
содержится обобщенная фактическая информация о том, какие управляющие воздействия
ранее на практике переводили сложный объект управления в таком текущем состоянии и с
такой предысторией в заданное целевое состояние. На основе этой информации и
принимается решение о выборе управляющих воздействий.
С позиций, развиваемых в данной работе, термин "принятие решений" едва
ли вообще в полной мере применим к традиционным АСУ. Дело в том, что
"принятие решений", как минимум, предполагает целостное видение
объекта в окружающей среде, причем не только в актуальном (текущем)
состоянии, но и в динамике и во взаимодействии как друг с другом, так и с
системой управления, предполагает рассмотрение различных
альтернативных вариантов развития всей этой системы, а также сужение
многообразия (редукцию) этих альтернатив на основе определенных
целевых критериев путем применения определенных управляющих
воздействий.
Конечно, традиционный метод является адекватным и его применение вполне
корректно и оправданно в тех случаях, когда объект управления действительно является
стабильной и жестко детерминированной системой, а влиянием окружающей среды на
него можно пренебречь.
Однако в случаях, когда объект управления представляет собой сложную систему,
традиционный метод малоэффективен.
Причина этого в том, что если объект управления динамичен, то модели, лежащие в
основе алгоритмов управления им, быстро становятся неадекватными, так как изменяются
отношения между входными и выходными параметрами, да и сам набор существенных
параметров тоже. По сути дела это означает, что традиционные АСУ способны управлять
состоянием объекта управления лишь вблизи точки равновесия путем слабых
управляющих воздействий на него, т.е. методом малых возмущений. Вдали же от
состояния равновесия с традиционной точки зрения поведение объекта управления
выглядит непредсказуемым и неуправляемым.
В итоге АСУ, основанные на детерминистском подходе, практически не
работают с большими сложными динамическими многопараметрическими
слабодетерминированными объектами управления, такими, например, как
макро– и микросоциально–экономические системы в условиях
динамичной экономики "переходного периода", иерархические элитные и
этнические группы, социум и электорат, физиология и психика человека,
природные и искусственные экосистемы, большие и сложные технические
системы (например, комбинированные системы энергоснабжения) и
многие другие. Если нет однозначной связи между входными и
выходными параметрами объекта управления (т.е. между входными
параметрами и состоянием объекта), иначе говоря если эта связь имеет
выраженный вероятностный характер, то детерминистские модели, в
которых предполагается, что результатом измерения некоторого параметра
является просто число, изначально неприменимы. Кроме того, в случае
управления сложными системами вид этой связи может быть просто
неизвестным, и тогда необходимо исходить из самого общего
предположения о том, что она вероятностная (стохастическая), определять
и уточнять вид этой связи непосредственно в процессе эксплуатации АСУ.
Таким образом, принципы идентификации состояния объекта управления
и выработки решения об управляющем воздействии, применяемые в
традиционных АСУ, не являются адекватными в случае, когда объект
управления представляет собой сложную систему.
Основная проблема состоит в том, что традиционные АСУ работают на
основе параметров объекта управления, закономерности связей которых
уже известны, изучены и отражены в математической модели, в случае же
сложных объектов управления создать такую модель на основе априорной
информации об объекте управления затруднительно.
В данном же исследовании поставлена задача разработки таких методов
проектирования АСУ, которые позволят создать системы, способные
выявлять и набор наиболее значимых параметров, и определять характер
связей между ними и состояниями объекта управления непосредственно в
процессе эксплуатации.
ГЛАВА 2. ПАРАМЕТРИЧЕСКАЯ МОДЕЛЬ АСУ
И АЛГОРИТМ ЕЕ ФУНКЦИОНИРОВАНИЯ
2.1. ЦЕЛИ И ТИПОВАЯ СТРУКТУРА АСУ.
ПАРАМЕТРИЧЕСКАЯ МОДЕЛЬ АДАПТИВНОЙ
АСУ СС
Цель применения АСУ обычно можно представить в виде некоторой
суперпозиции трех подцелей:
-
стабилизация состояния объекта управления в динамичной или агрессивной внешней
среде;
перевод объекта в некоторое конечное (целевое) состояние, в котором он приобретает
определенные заранее заданные свойства;
повышение качества функционирования АСУ (адаптация).
Как показано в главе 1 данной работы, в классическом варианте АСУ
рассматривается как система, состоящая из двух основных подсистем:
управляющей и управляемой, т.е. из субъекта и объекта управления
(рис. 2.1).
Рис. 2. 1. Типовая структура АСУ
Как правило, АСУ действует в определенной окружающей среде, которая
является общей и для субъекта, и для объекта управления (система
управления находится вне среды объекта управления в случае
автоматизированных систем дистанционного управления, рассмотрение
которых выходит за рамки данной работы).
Граница между тем, что считается окружающей средой, и тем, что
считается объектом управления относительна и определяется
возможностью подсистемы управления оказывать на них воздействие: на
объект управления управляющее воздействие может быть оказано, а на
среду нет.
В данной работе основное внимание уделяется применению методов распознавания
образов и принятия решений в структуре АСУ (в составе управляющей подсистемы), во–
первых, в подсистеме идентификации (мониторинга) состояний среды и объекта
управления, и, во–вторых, в подсистеме выработки управляющих воздействий.
Конкретизируем типовую структуру АСУ, используя представления о
входных и выходных параметрах объекта управления. В результате
получим параметрическую модель адаптивной АСУ сложными системами
(рис. 2.2).
Рис. 2. 2. Параметрическая модель адаптивной АСУ
сложными системами
Входные параметры
X
подразделяются на следующие группы:
-
характеризующие предысторию среды и объекта управления;
характеризующие актуальное состояние среды и объекта управления;
технологические (управляемые) параметры;
неуправляемые параметры (не зависящие от человека).
Выходные параметры Y – это свойства объекта управления, зависящие от входных
параметров (в т.ч. параметров, характеризующих среду):
Y Y(X )
В автоматизированных системах параметрического управления целью управления
является получение определенных значений выходных параметров объекта управления.
Однако, как было показано выше, в случае сложного объекта управления
(СОУ) необходимо ввести понятие "состояние объекта управления", так
как выходные параметры СОУ связаны с его состоянием сложным и
неоднозначным способом:
T T (Y ).
Поэтому возможность параметрического управления сложными объектами является
проблематичной и вводится более общее понятие "управление по состоянию СОУ". При
этом в предельном случае, когда связь выходных параметров и состояний объекта
управления имеет однозначный и детерминистский характер, управление по состояниям
сводится к управлению по параметрам.
Задача идентификации состояния СОУ по его выходным параметрам решается
подсистемой идентификации управляющей подсистемы, работающей на принципах
системы распознавания образов. При этом классами распознавания являются состояния
сложного объекта управления, а признаками – его выходные параметры.
Подсистема выработки управляющих воздействий, также основанная на алгоритмах
распознавания образов, решает следующие задачи:
- прогноз развития окружающей среды;
- прогноз развития объекта управления;
-
выбор управления
X
, переводящего объект управления в целевое состояние
При этом последовательно решаются следующие две обратные задачи распознавания:
T.
T
во–первых, по заданному целевому состоянию
определяются наиболее
характерные для данного состояния выходные параметры объекта управления:
T
Y T (T ),
во–вторых, по определенному на предыдущем шаге набору выходных параметров
Y определяются входные параметры X
, с наибольшей эффективностью переводящие
объект в состояние с этими выходными параметрами:
X Y T (Y ).
Подсистема реализации управляющих воздействий осуществляет
выбранное технологическое воздействие на объект управления.
Таким образом, цель АСУ представлена в форме суперпозиции трех
подцелей. Она может быть достигнута лишь при вполне определенной
функциональной структуре самой АСУ, которая представлена как в форме
традиционной типовой модели, так и в форме предложенной
детализированной параметрической модели.
В параметрической модели адаптивной АСУ СС конкретно определено
и обосновано место системы распознавания образов и принятия решений в
функциональной структуре управляющей подсистемы адаптивной АСУ СС.
2.2. АЛГОРИТМЫ ФУНКЦИОНИРОВАНИЯ
АДАПТИВНЫХ АСУ СС
2.2.1. ПРИМЕНЕНИЕ СИСТЕМЫ РАСПОЗНАВАНИЯ И ПРИНЯТИЯ
РЕШЕНИЙ В ПОДСИСТЕМАХ ИДЕНТИФИКАЦИИ И
ВЫРАБОТКИ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ
Как видно из рис. 2.2, система распознавания образов входит в состав как
подсистемы идентификации состояния объекта управления (мониторинга),
так и подсистемы выработки управляющих воздействий.
Однако применяется она в этих подсистемах по–разному.
В подсистеме идентификации система распознавания образов применяется для того,
чтобы классифицировать состояние сложного объекта управления, т.е. дать ему
обобщающую оценку, не сводящуюся к совокупности значений выходных параметров.
Таким образом, в подсистеме идентификации основным является режим распознавания.
Естественно, что без режима обучения системы распознавания этот режим вообще не
будет работать, а без режима верификации будет, но неизвестно как (что неприемлемо).
В подсистеме выработки управляющих воздействий по заданным целевым
состояниям определяются:
- предпосылки, т.е. не зависящие от человека факторы (предыстория, факторы среды),
необходимые для достижения этого состояния;
- управляющие воздействия, которые могут перевести (т.е. ранее переводили) сложный
объект управления в данном актуальном (исходном) состоянии, с данной
предысторией и находящийся в данной окружающей среде в заданное целевое
состояние.
Обе эти задачи, как будет обосновано ниже, относятся к обратным
задачам декодирования и для системы распознавания образов являются
стандартными.
Реализуются
они
в
режиме
анализа:
"Вывод
информационного портрета класса с фильтрацией по уровню признаков".
Адаптивность алгоритмов обеспечивается следующим. Накопление
информации о результатах предыдущих циклов управления в базе данных
примеров позволяет учесть при принятии решений о выборе управляющих
воздействий новые закономерности связи факторов и поведения объекта
управления. При высокой динамичности объекта управления ранее
накопленные примеры устаревают и их влияние на выбор управляющих
воздействий с течением времени уменьшается. Кроме того имеются такие
адаптивные возможности, как пересмотр экспертных оценок и изменение
списков классов распознавания и факторов.
После выработки управляющих воздействий с помощью режима
распознавания может быть осуществлен прогноз результатов их применения.
Таким образом, в подсистеме выработки управляющих воздействий режим анализа
обобщенных образов является основным, а режим распознавания – вспомогательным.
Естественно, без режима обучения и режима верификации этот режим также либо вообще
не будет работать, либо будет, но неизвестно как.
Следовательно, в подсистемах идентификации (мониторинга) и выработки
управляющих воздействий может быть применена практически одна и та же система
распознавания образов. Однако в этих подсистемах система распознавания используется
по–разному и в ней обрабатывается различная информация: в системе идентификации
используется лишь режим распознавания, а в подсистеме выработки управляющих
воздействий – прежде всего режим анализа, а также распознавания. В обеих подсистемах
используются режимы обучения и верификации решающих правил.
2.2.2. ПРИНЯТИЕ РЕШЕНИЯ ОБ УПРАВЛЯЮЩЕМ ВОЗДЕЙСТВИИ В АСУ
КАК РЕШЕНИЕ ОБРАТНОЙ ЗАДАЧИ ДЕКОДИРОВАНИЯ ТЕОРИИ
ИНФОРМАЦИИ И ОБРАТНОЙ ЗАДАЧИ РАСПОЗНАВАНИЯ ОБРАЗОВ
Рассмотрим глубокую аналогию между каналом передачи информации и объектом
управления.
Варианты структур каналов передачи информации
Канал передачи информации состоит из линии связи, модулятора и демодулятора,
кодирующего и декодирующего, а также решающих устройств, позволяющих с высокой
степенью достоверности принять и передать сообщение [351].
Для увеличения надежности передачи применяются также каналы обратной связи и
решающие устройства. Последние служат для классификации сомнительных сигналов и
отождествления их с достаточно высокой степенью достоверности с состояниями
источника информации или с определенным кодом (рис. 2.3).
Рис. 2. 3. Варианты структур каналов передачи информации
Информационная модель канала передачи информации
и аналогия со структурой АСУ
Обобщив варианты структур каналов передачи информации, получим следующую
информационную модель канала передачи информации (рис. 2.4):
ИП
f
z
ИИ
П1
x
ЛС-ПК
y
П2
u
ПИ
ЛС-ОК
Рис. 2. 4. Обобщенная информационная модель
канала передачи информации
Источник информации ИИ создает сигналы z, которые после кодирования и
модуляции в преобразователе П1 превращаются в сигналы x и поступают в линию связи
ЛС. Для удобства сигналы источника будем называть сообщениями, а сигналы x в линии
связи просто сигналами. В результате действия помех f сигнал y на приемной стороне
может отличаться от сигнала x. Помехи имеют случайный характер и подчиняются
статистическим законам. Фактически источником помех является окружающая среда,
имеющая сложную структуру, но на практике удобно считать, что помехи создаются
некоторым источником помех ИП с определенными статистическими свойствами и
поступают в линию связи в виде сигнала f. Приемная часть канала содержит
преобразователь П2, демодулирующий и декодирующий принятые сигналы y, и приемник
информации ПИ, перерабатывающий принятые сообщения u.
Сравним две информационные системы: канал передачи информации и
автоматизированную систему управления, проанализируем, чем они сходны и чем
отличаются друг от друга.
Сравнивая обобщенную информационную модель канала передачи
информации на рис. 6.4 и функциональную схему АСУ на рис. 1.1 мы
видим, что с формальной точки зрения у них есть очень много общего как
по структуре, так и по функциям (табл. 2.1).
Таблица 2. 1
СРАВНЕНИЕ ФУНКЦИОНАЛЬНОЙ СХЕМЫ АСУ
И ОБОБЩЕННОЙ ИНФОРМАЦИОННОЙ МОДЕЛИ
КАНАЛА ПЕРЕДАЧИ ИНФОРМАЦИИ
Автоматизированная
Канал передачи информации
система управления
ЧЭ – чувствительный элемент
ИИ – источник информации
У – усилитель
П1 – кодировщик – модулятор
К1 – последовательное
ЛС-ПК – линия связи – прямой канал
корректирующее устройство
К2 – параллельное
ЛС-ОК – линия связи – обратный канал
корректирующее устройство
ИМ – исполнительный механизм
П2 – демодулятор – декодировщик
ОУ – объект управления
ПИ – приемник информации
Кроме того, обе эти системы прежде всего представляют собой информационные
системы, т.е. предназначены для вполне определенных целей, которые достигаются путем
передачи и записи информации. Таким образом, именно информация переводит эти
системы из нефункционального состояния в функциональное, повышает их уровень
системности.
Различие между каналом передачи информации и АСУ состоит в различии
их целей, т.е. в том, ради чего в них передается информация:
в канале информация передается для сообщения приемнику;
в АСУ информация передается для изменения структуры и функций объекта
управления.
Необходимо отметить, что любой приемник информации при получении
информации изменяет свою структуру, а иногда и функции, но в теории связи этот факт
не играет особой роли и ему не уделяется особого внимания. Однако в теории и практике
автоматизированного управления именно это обстоятельство выступает на первый план,
так как именно ради изменения состояния объекта управления на него и оказывается
информационное управляющее воздействие.
Интересно, что врач-психотерапевт что-то говорит пациенту (гипнотику) вовсе не
ради того, чтобы сообщить ему некоторую информацию, а чтобы вылечить его, т.е.
перевести из болезненного состояния в здоровое. Учитель также воздействует на ученика
не столько ради сообщения ему некоторой информации, хотя этот момент и присутствует,
сколько ради того, чтобы научить его учиться, т.е. изменить его. Программист также
далек от того, чтобы сообщать компьютеру некоторую информацию, просто он
разрабатывает программную систему, т.е. сначала создает, а затем изменяет некоторый
информационный объект, который с его точки зрения безусловно представляет собой
объект управления ничуть не в меньшей степени, чем кувшин, формирующийся из глины,
под руками гончара с точки зрения последнего. Да и кувшин формируется из глины,
собственно говоря, по мере того, как информация образа кувшина перезаписывается через
руки гончара в глину, представляющую собой не что иное, как приемник и носитель
информации.
Эти глубокие аналогии могут быть развиты и продолжены, если исследовать роль
обратных связей, с одной стороны, для повышения помехоустойчивости канала передачи
информации, а с другой, – для управления в автоматизированных системах управления.
-
Помехоустойчивость передачи и приема информации
Повышение помехоустойчивости является одной из наиболее важных задач
передачи информации. Оно обеспечивается за счет введения определенной избыточности,
т.е. увеличения объема сигнала. Это возможно, если скорость передачи информации по
каналу это позволяет.
Применяются следующие методы повышения помехоустойчивости:
1. Увеличение мощности сигнала для увеличения отношения сигнал/шум.
2. Применение помехоустойчивого кодирования, т.е. введение дополнительных символов
в код передаваемого сообщения. Эти символы позволяют на приемной стороне
обнаружить и исправить ошибки. Введение дополнительных символов увеличивает
время передачи сообщения и/или частоту передачи символов.
3. Применение помехоустойчивых видов модуляции.
4. Применение помехоустойчивых методов приема (фильтрации).
5. Применение каналов с обратной связью.
Остановимся на последнем методе подробнее.
Если имеется дополнительный канал связи между источником и
приемником информации, то его можно использовать как канал обратной
связи, по которому от приемника к источнику может передаваться для
контроля достоверности приема:
- весь объем полученной информации;
- только информация об элементах сообщения, достоверность которых
сомнительна и которые требуется повторить.
Системы передачи первого типа называются системами с информационной обратной
связью, а второго типа – с решающей обратной связью.
В системах с решающей обратной связью на приемной стороне должно
быть интеллектуальное решающее устройство, обеспечивающее оценку
степени достоверности принимаемой информации: если уверенность в
достоверности высока, то обратный сигнал не посылается, если же
уверенность недостаточна, то делается запрос на повторную передачу.
Работа такой системы напоминает телефонный разговор, в котором слушающий
переспрашивает слова или фразы, которые он из-за плохой слышимости не смог
распознать. Это означает, что система декодирования в общем случае является системой
распознавания и решающее устройство в канале передаче информации с решающей
обратной связью по сути дела должно быть системой распознавания образов.
Интерпретация задачи выработки управляющего воздействия
в АСУ как обратной задачи декодирования теории информации
и обратной задачи распознавания образов
Теория систем связи является областью науки, в которой первоначально возникла, а
затем в основном и развивалась теория информации. В другие области науки теория
информация проникла исторически позже и не в получила в них столь мощного развития.
Тем не менее и это дало очень плодотворные и интересные результаты [2, 3, 35, 74, 111,
128, 136, 142, 161, 164, 184, 212, 250, 256, 351, 373, 382, 383, 389, 391, 404, 405].
По мнению авторов, существующие глубокие аналогии между каналом передачи
информации и автоматизированной системой управления, с одной стороны, а также
между процессом декодирования передаваемого сигнала в канале передаче информации и
процессом распознавания образов, с другой, позволяют обоснованно надеяться на то, что
эти аналогии могут быть с успехом продолжены и что на этом пути могут быть получены
новые интересные для теории и практики АСУ результаты.
С позиций теории информации объект управления естественным образом может
рассматриваться как канал связи (включая приемник информации), на вход которого
подается определенная информация в форме входных параметров. Входная информация
преобразует состояние объекта управления, т.е переводит его из начального состояния в
конечное, характеризующееся определенными выходными параметрами. Таким образом,
на выходе объекта управления входная информация приобретает форму выходных
параметров.
Канал связи считается идеальным, если на его выходе фиксируются те же
параметры, что и на входе. Поэтому в теории связи ставится задача создания каналов
связи, обеспечивающих формирование выходных параметров, тождественных входным.
Если рассматривать объект управления как канал связи, то очевидно, что он далек от
идеального с точки зрения теории информации, так как преобразует входные параметры в
выходные по сложным, более того, до конца не известным законам.
Формирование на выходе объекта управления определенных заранее заданных
параметров можно считать преобразованием этого объекта из исходного состояния,
характеризующегося набором входных параметров, в целевое состояние, которое
осуществлено путем подачи на его вход определенной информации (управляющего
воздействия).
Поэтому в теории автоматизированного управления ставится иная задача: зная с
определенной точностью закономерности преобразования входных параметров в
выходные разработать и подать на вход объекта управления (канала связи) такие входные
параметры, которые обеспечивают получение на его выходе заранее заданных выходных
параметров.
Идеальный канал связи не искажает входной информации, т.е. выходные параметры
не отличаются от входных. В шумящем канале связи связь выходных параметров с
входными носит сложный и неоднозначный характер, определяемый статистическими
характеристиками шума. Важнейшим разделом теории информации является теория
построения кодов, позволяющих обнаруживать и исправлять ошибки, возникающие из–за
шума в канале связи. Эти коды имеют определенные возможности, т.е. могут, например,
гарантировать абсолютную достоверность восстановления переданного с искажением
слова при однократной ошибке. Однако, когда количество ошибок превышает
помехоустойчивость кода, он выдает произвольные (случайные) результаты
декодирования, что является совершенно неприемлемым.
Поиск методов построения систем интеллектуального декодирования,
обеспечивающих устойчивую работу при очень большом
количестве ошибок в канале связи путем учета как статистики
различных видов ошибок, так и их динамики, приводит к идее
применения для этих целей алгоритмов распознавания образов.
Следовательно, в наиболее общей постановке задача декодирования с
исправлением ошибок может трактоваться как задача распознавания
образов, так как процесс декодирования по сути дела сводится к
идентификации, т.е. определению класса, к которому относится принятое
слово.
Системы распознавания тесно связаны с системами принятия решений, так как
распознавание есть не что иное, как принятие решения о принадлежности
распознаваемого объекта к определенному классу [295].
С позиций теории АСУ объект управления преобразует входные
параметры в выходные не случайным образом, а в соответствии со своей
функциональной структурой. Аналитически это преобразование задается
моделью, которая является аналитическим выражением (формулой),
детерминистским образом связывающей выходные параметры с входными.
Для простых объектов управления достаточно знать их модель, чтобы по
целевым выходным параметрам определить задающее их управление. Это
означает, что простые детерминистские объекты управления можно
рассматривать как каналы связи без помех.
Для сложных объектов управления связь выходных параметров с входными имеет
более сложный статистический характер, чем у детерминистских объектов. Кроме того на
эту связь влияют параметры, значения которых являются неопределенными. Тем не менее,
эта связь, безусловно, существует. Это означает, что сложный объект управления можно
рассматривать как зашумленный информационный канал, на вход которого действуют
управляемые параметры, влияние среды и неизвестных параметров рассматривается как
шум, а на выходе формируются выходные параметры.
В постановке теории информации данная, т.е. первая, задача управления по
параметрам формулируется следующим образом: "Определить, какую информацию
необходимо подать на вход объекта управления (т.е. какими должны быть его входные
параметры), чтобы получить на его выходе заранее заданную выходную информацию
(выходные параметры)".
Однако в случае сложного объекта управления его состояние не сводится к
значениям выходных параметров. Поэтому необходимо предварительно решить вторую
задачу, т.е. исходя из того, что целевые состояния объекта управления известны,
определить приоритетные выходные параметры, играющие основную роль в
детерминации этих состояний.
Кроме того, сама связь выходных и входных параметров у сложных объектов
управления имеет сложный и динамичный характер, который не может быть адекватно
описан статической детерминистской аналитической моделью. Вместе с тем применение
обучающейся системы распознавания образов обеспечивает решение и этой третьей
задачи, т.е. построение и адаптацию динамичной информационной модели объекта
управления и в том случае, когда он является сложной системой.
С позиций теории информации все эти три задачи относятся к обратным задачам
декодирования. Для систем распознавания образов, формирующих обобщенные образы
классов распознавания, это стандартная операция, не представляющая проблемы.
Предложено рассматривать сложный объект управления как зашумленный
информационный канал, на вход которого действуют управляемые параметры, влияние
среды рассматривается как шум, а на выходе формируются выходные параметры.
Обоснован важный в теоретическом отношении вывод о том, что принятие решения
об управляющем воздействии представляет собой решение обратной задачи
декодирования теории информации, или в общем случае – обратной задачи распознавания
образов.
2.2.3. ОБОБЩЕННАЯ СТРУКТУРА И АЛГОРИТМ
ФУНКЦИОНИРОВАНИЯ АВТОМАТИЗИРОВАННОЙ
СИСТЕМЫ РАСПОЗНАВАНИЯ ОБРАЗОВ И ПРИНЯТИЯ
РЕШЕНИЙ В СОСТАВЕ АДАПТИВНОЙ АСУ СС
Рассмотрим алгоритмы функционирования системы на примере ее
применения в подсистеме выработки управляющих воздействий (рис. 2.5).
Информация о состоянии среды и объекта управления, а также вариантах
управляющих воздействий поступает и на вход подсистемы распознавания, и на вход
подсистемы обучения, например с учителем (экспертом).
Рис. 2. 5. Обобщенная функциональная структура программной
инструментальной оболочки
В режиме распознавания работа по преобразованию информации о
вариантах управляющего воздействия в формализованный вид
осуществляется либо в режиме реального времени программным
интерфейсом с источником этой информации, либо оператором,
обслуживающим систему. При этом используются описательные шкалы,
позволяющие закодировать виды управляющих воздействий и состояния
среды и объекта управления. В результате выполнения данной операции
формируются специальные базы данных, которые называются
"распознаваемая выборка". Эти базы обрабатываются распознающим
алгоритмом, в результате чего формируется основной результат работы
подсистемы идентификации: автоматическая классификация будущих
возможных состояний объекта управления при различных вариантах
управляющих воздействий на него. При этом учитывается также состояние
среды и прогноз ее развития.
Однако режим распознавания не может быть практически использован, пока не
сформированы решающие правила, с которыми работает распознающий алгоритм. А эту
функцию выполняет режим обучения с учителем (экспертом).
Данный режим в подсистеме выработки управляющих воздействий работает во
многом аналогично тому, как и в подсистеме идентификации (мониторинга) состояний
среды и объекта управления, однако есть и существенные отличия. Главное из них
вытекает из отличия задач идентификации и прогнозирования. Математически эти задачи
практически не отличаются. При идентификации по актуальным признакам надо
классифицировать актуальное состояние, а при прогнозировании по прошлым и
актуальным признакам – будущее состояние. Таким образом, различие между этими
режимами состоит, в основном, в содержании исходной информации, а не в методах ее
обработки.
Исходя из вышесказанного можно предположить, что применение методов
распознавания образов и принятия решений в принципе позволяет решить задачи
подсистемы идентификации одновременно с выработкой управляющих воздействий.
При преобразовании неструктурированной информации о вариантах управления в
формализованный вид выполняются те же работы (и теми же исполнителями), что и в
подсистеме распознавания. Кроме того, дополнительно экспертами с использованием
классификационных шкал сообщается системе, к каким результатам на практике приводят
те или иные управляющие воздействия на объект управления, находящийся в
определенном актуальном состоянии и в данной окружающей среде. Вся эта информация
представляется в виде специальных кодированных бланков, используемых также для
ввода информации в компьютер. В результате ее ввода в базы данных получается так
называемая "обучающая выборка", которая по своей структуре очень похожа на
распознаваемую, но содержит еще и верифицированную классификационную
информацию, имеющую прогностическую ценность и предоставляемую экспертами.
Таким образом, обучающая выборка организуется на основе экспериментальных данных,
дополненных их экспертной оценкой. Эта выборка обрабатывается обучающим
алгоритмом, на основе чего им формируются решающие правила (обобщенные образы
классов распознавания, отражающие весь спектр будущих возможных состояний объекта
управления), а также определяется ценность признаков для решения задач подсистемы
идентификации, мониторинга и прогнозирования.
Признаки, не имеющие особой прогностической ценности, могут быть корректным
способом удалены из системы. Этот процесс осуществляется с помощью итерационных
алгоритмов (при этом обеспечивается выполнение ряда ограничений, таких как
результирующая размерность пространства признаков, его информационная избыточность
и т.п.), заданных пользователем.
Формирование решающих правил является основным результатом работы
подсистемы обучения, но не единственным. Эта система позволяет провести так
называемый типологический анализ.
Режим верификации (расчета интегральной и дифференциальной валидности, т.е.
контроля качества решающих правил) основан на использовании внутреннего критерия
качества алгоритма распознавания и может быть выполнен в любой момент (это должно
обязательно исполняться после каждой адаптации, а также по требованию экспертов). Для
активизации данного режима обучающая выборка копируется в распознаваемую,
осуществляется ее автоматическая классификация, результаты которой сравниваются с
независимой экспертной классификацией. На основе этого рассчитывается так называемая
внутренняя дифференциальная и интегральная валидность, которая является,
соответственно, детализированной и обобщающей характеристиками качества решающих
правил.
Однако адаптация, т.е. переформирование решающих правил, не обязательно
выполняется только при обнаружении неудовлетворительного качества их работы, как в
алгоритмах перцептронного типа [333] (в данном случае при неудовлетворительных
результатах прогнозирования эффекта управления). По мнению авторов, более
рационально проводить адаптацию каждый раз, когда становится доступной новая,
необходимая для этого информация. Поэтому в подсистеме идентификации предусмотрен
режим дозаписи распознаваемой выборки к обучающей, чтобы в последующем, когда за
счет использования обратной связи станет известна степень адекватности прогноза
результатов управления, этой верифицированной (т.е. достоверной) информацией
дополнить обучающую выборку и переформировать решающие правила.
Необходимо также отметить, что при адаптации могут быть легко изменены и
описательные, и классификационные (оценочные) шкалы, что позволяет плавно
расширить или изменить сферу функционирования АСУ.
Адаптивные АСУ сложными системами, созданные на основе предлагаемой
технологии, относятся к классу автоматизированных систем организационного
управления. Это означает, что и идентификация состояния среды и объекта управления, и
выработка управляющего воздействия осуществляются с участием человека, т.е. по
"человеко–машинной" технологии. Поэтому и управляющее воздействие реализуются
системой не "автоматически" и в форме, соответствующей характеру объекта управления.
Итак, модель СОУ формируется в процессе обучения. Выработка управляющего
воздействия осуществляется в подсистеме типологического анализа путем решения
обратной задачи распознавания (режим "Информационные портреты"). В режиме
распознавания осуществляется идентификация состояния СОУ и прогнозирование
результатов применения управляющего воздействия.
ГЛАВА 3. МЕТОДОЛОГИЯ И МЕТОДИКА СИНТЕЗА
И ЭКСПЛУАТАЦИИ АДАПТИВНЫХ АСУ
СЛОЖНЫМИ СИСТЕМАМИ
В данной главе просуммированы основные результаты предыдущих глав и на основе
этого получен главный итог теоретической части данной работы: методология
синтеза адаптивных АСУ СС. Далее эта методология конкретизирована до уровня
методики, алгоритма, а затем и конкретного примера реализации синтеза адаптивной
АСУ CC
(в
качестве
СОУ
выбрана
автономная
комбинированная
фотоветроэлектроэнергетическая установка – ФВЭУ).
3.1. МЕТОДОЛОГИЯ СИНТЕЗА ААСУ СС
Как было показано выше, объект определяется как сложный, если для
построения его аналитической модели недостаточно априорной
информации. Очевидно, классификация объекта как сложного
относительная, т.е. зависит не только от его объективной сложности, но и
от наличия у разработчиков АСУ достаточной информации о нем.
Следовательно, для построения аналитической модели сложного объекта
управления необходимо изучить (познать) его.
В качестве инструмента для первого этапа изучения (познания)
сложных систем, связанного с первичным накоплением и анализом
данных об их поведении под влиянием различных факторов, авторами
предложено применение обучающихся с учителем адаптивных моделей
распознавания образов и принятия решений, основанных на теории
информации вообще и на апостериорном подходе в частности.
Подобные модели предлагаются в настоящем исследовании.
Необходимо отметить, что их применение в АСУ не является традиционным.
Применение обучающейся с учителем адаптивной модели в реально
работающей АСУ позволяет выделить существенные признаки (факторы), а
также зависимости между ними и целевыми состояниями объекта
управления. Построение на этой основе содержательной аналитической или
какой-либо другой статической модели детерминистского типа уже не
является большой проблемой.
Таким образом, адаптивные АСУ сложными системами, построенные на
основе обучающихся и адаптивных моделей, могут
рассматриваться как инструментальные средства для разработки
традиционных АСУ.
Основная задача, возникающая при синтезе АСУ, состоит в определении
конкретного вида модели, которая представляет собой по существу математическую
модель объекта управления. Модель представляет собой некоторое аналитическое
выражение (или систему выражений), связывающее входные и выходные параметры
объекта управления. Для построения модели используется априорная информация об
объекте управления.
В случае сложного объекта управления пути построения модели неочевидны и
задача ее построения трансформируется в проблему. Это следует уже непосредственно
из самого определения сложной системы.
Само понятие "модели" также требует уточнения для случая СОУ. Выходные
параметры связаны с состояниями СОУ сложным, неоднозначным, а часто и просто
неизвестным образом, поэтому известных параметров СОУ недостаточно для полного и
однозначного определения его состояния. Следовательно, принимать решение об
управляющем воздействии на СОУ, зная только его выходные параметры, рискованно.
Управление СОУ должно осуществляться не по его параметрам, а по состояниям. Но
для этого, как минимум, надо уметь идентифицировать эти состояния. Следовательно, в
АСУ СОУ возникает задача вероятностной идентификации состояния сложного объекта
управления по его наблюдаемым (известным) параметрам. (Отметим, что для объектов
управления, которые полностью описываются своими параметрами, понятие "состояние
объекта" эквивалентно понятию "система параметров", поэтому оно в явном виде не
вводится, хотя и подразумевается.)
Данная задача должна решаться на основе математической модели СОУ. Для ее
построения целесообразно использовать более общие классы моделей, чем аналитические,
например, матричные (статистические) и информационные модели, которые относятся к
абстрактным моделям.
Подобные модели не могут быть непосредственно применены для управления. Они
требуют предварительной конкретизации, которая осуществляется путем учета
конкретной информации о фактическом поведении данного СОУ. Предлагается
компенсировать недостаток априорной информации о сложном объекте управления
апостериорной информацией о нем, т.е. окончательный синтез модели СОУ (его модели)
предлагается осуществлять не до начала эксплуатации АСУ, как обычно, а уже
непосредственно в процессе ее эксплуатации в адаптивном режиме.
Первая и основная цель всякого АСУ, в том числе и АСУ СОУ, состоит
в том, чтобы эффективно перевести объект управления в целевое состояние.
Но АСУ СОУ должны обеспечивать также и достижение второй задачи, а
именно: формирование конкретной информационной модели СОУ на основе
некоторой абстрактной модели и фактической информации о поведении
СОУ.
Из вышесказанного следует, что работы по разработке и внедрению
АСУ СОУ существенно отличаются от "стандартного варианта". Так, обычно
АСУ сначала полностью разрабатываются (включая модель объекта
управления и методы выработки управляющего воздействия), а затем
внедряются, причем уже на этапе экспериментальной эксплуатации
осуществляется реальное управление объектом управления. Этот цикл
"разработка–внедрение" может повторяться, в этом случае говорят о
разработке и внедрении новых версий АСУ.
В случае же АСУ СОУ конкретизация модели сложного объекта
управления и методов выработки управляющих воздействий осуществляется
не "за рабочим столом", а лишь на этапе экспериментальной эксплуатации.
При этом реальное управление СОУ не осуществляется, а лишь имитируется
(моделируется) в целях определения его эффективности и качества. Этап
экспериментальной эксплуатации, по сути являющийся адаптацией,
заканчивается тогда, когда качество управления достигает практически
приемлемого уровня. Только после этого начинается реальная эксплуатация
АСУ СОУ в опытно–производственном и производственном режимах.
Существуют два подхода в применении АСУ СОУ:
эксплуатация в режиме АСУ с фиксированной моделью;
эксплуатация в адаптивном режиме, когда периодически согласно
утвержденному регламента или при наступлении определенного события,
например, когда в АСУ накопится информация об определенном
количестве циклов управления [13], запускается режим перестройки
модели адаптации.
Следовательно, по своей сущности АСУ СОУ являются адаптивными,
но использоваться они могут и как стационарные [13]. Таким образом,
вторая цель адаптивных АСУ (адаптация модели) в контексте данного
исследования выступает на первый план, так как авторы предлагают
использовать адаптивные АСУ СОУ в качестве инструментальных систем
для синтеза АСУ, т.е. по сути дела в качестве систем автоматизации
проектирования АСУ (САПР АСУ). Имеется в виду, что абстрактные модели,
реализованные в адаптивных АСУ СОУ, достаточно универсальны для того,
чтобы путем адаптации (привязки) на основе данных о различных
конкретных СОУ обеспечить синтез широкого класса конкретных АСУ.
При проектировании адаптивной АСУ СОУ прежде всего возникает
задача выбора определенной абстрактной модели СОУ. К модели
предъявляют ряд довольно жестких требований, связанных с тем, что эта
модель должна обеспечивать выработку управляющего воздействия в АСУ
СОУ. Как минимум, это означает, что данная модель должна обеспечивать
решение следующих задач:
- формирование обобщенных образов состояний СОУ на основе обучающей
выборки (обучение);
- идентификацию состояния СОУ на основе его выходных параметров
(распознавание);
- определение влияния входных параметров на перевод СОУ в различные
состояния (обратная задача распознавания);
- прогнозирование поведения СОУ в условиях полного отсутствия
управляющих воздействий;
- прогнозирование поведения СОУ при различных вариантах управляющих
воздействий.
Чтобы решение этих задач представляло практический интерес, оно
должно обеспечиваться в режиме реального времени на реальных
размерностях данных и на стандартных компьютерах.
Учитывая эти требования, авторами предложено в качестве
абстрактной модели применить модель распознавания образов, которая
конкретизируется путем обучения с учителем (экспертом) на основе
информации о фактическом поведении СОУ.
Отметим, что с формально-математической точки зрения задачи
идентификации и прогнозирования не отличаются, различие состоит лишь в
содержании обрабатываемой информации: при идентификации по
актуальным признакам надо классифицировать актуальное состояние СОУ, а
при прогнозировании по прошлым и актуальным признакам (факторам) его
будущее состояние.
Возникло предположение, что различные методы распознавания в различной
степени удовлетворяют вышеперечисленным требованиям. И действительно,
аналитический обзор и анализ различных моделей распознавания образов, описанных в
специальной литературе, приводит к выводу, что, безусловно, выбор уже разработанной
абстрактной модели, удовлетворяющей всем этим требованиям одновременно,
представляет собой определенную проблему.
Поэтому авторами было признано целесообразным разработать модель
распознавания с учетом требований, предъявляемых в адаптивных АСУ сложными
объектами. Такая модель была разработана [318, 327, 329] на основе теории информации
и апостериорного подхода А.А.Харкевича [373], который предложил семантическую меру
целесообразности информации. В соответствии с этим подходом количество информации
измеряется изменением степени целесообразности поведения системы (в нашем случае
СОУ).
Рассмотрим подробнее применение данной модели в адаптивных АСУ
сложными объектами.
Как уже отмечалось выше, цель применения АСУ обычно можно
представить в виде некоторой суперпозиции трех подцелей:
1. Стабилизация состояния объекта управления в динамичной или агрессивной внешней
среде.
2. Перевод объекта в некоторое конечное (целевое) состояние, в котором он приобретает
определенные заранее заданные свойства.
3. Повышение качества функционирования АСУ (адаптация).
Эти цели имеют различные приоритеты в различных типах АСУ. В данном
исследовании на первый план выступает вторая цель, являющаяся более
общей.
В классическом варианте АСУ рассматривается как система, состоящая из двух
основных подсистем: управляющей и управляемой, т.е. из субъекта и объекта управления
(см. рис. 2.1). Причем АСУ действует в определенной окружающей среде, которая
является общей и для субъекта, и для объекта. Граница между тем, что считается
окружающей средой, и тем, что считается объектом управления относительна и
определяется возможностью подсистемы управления оказывать на них воздействие: на
объект управления управляющее воздействие может быть оказано, а на среду нет.
Как было указано выше, управляющая система (см. рис. 2.2) состоит из
следующих подсистем:
А. Подсистема
управления.
идентификации
состояний
окружающей
среды
и
объекта
Б. Подсистема выработки управляющих воздействий.
В. Подсистема реализации управляющих воздействий (исполнительный
орган).
Некоторые авторы [241] объединяют первые две подсистемы в одну, которую
называют управляющим органом.
А. Подсистема идентификации (мониторинга) по сути дела решает задачу
измерения, т.е. по определенным внешним признакам, на основе модели, она принимает
решения о принадлежности текущих состояний среды и объекта управления к
определенным классификационным категориям, т.е. к тем или иным градациям
измерительных шкал.
Б. Подсистема выработки управляющих воздействий анализирует влияние среды на
объект управления и вырабатывает такие управляющие воздействия, которые, действуя с
учетом прогнозируемого влияния среды, позволяют в определенном смысле "наилучшим
образом" достичь цели управления.
В. Подсистема реализации управляющих воздействий, т.е.
исполнительный орган, непосредственно осуществляет управляющее
воздействие на управляемый объект. Управляющие воздействия имеют
различную природу, соответствующую типу объекта управления.
Рассмотрим применение системы распознавания в подсистемах
идентификации и выработки управляющих воздействий адаптивных АСУ
СОУ. Как видно из рис. 2.2, система распознавания образов входит как в
подсистему идентификации состояния объекта управления (мониторинга),
так и в подсистему выработки управляющих воздействий.
Однако применяется она в этих подсистемах по–разному.
В подсистеме идентификации система распознавания образов применяется для того,
чтобы классифицировать состояние сложного объекта управления, т.е. дать ему
обобщающую (т.е. макро–) оценку, не сводящуюся к совокупности значений его
выходных параметров. Поэтому в подсистеме идентификации основным является режим
распознавания.
В подсистеме выработки управляющих воздействий по заданным целевым
состояниям СОУ определяют:
- предпосылки, т.е. не зависящие от человека факторы (включающие предысторию
СОУ, его актуальное состояние и факторы среды), необходимые для достижения этого
состояния;
- управляющие воздействия, которые могут перевести (т.е. ранее переводили) сложную
систему в данном актуальном состоянии, с данной предысторией и находящуюся в
данной окружающей среде в заданное целевое состояние.
Обе эти задачи относятся к обратным задачам декодирования теории
информации. Для предложенной авторами модели распознавания образов
они являются стандартными и реализуются в типологическом анализе при
выводе информационного портрета класса распознавания с фильтрацией по
уровню признаков.
После выработки управляющих воздействий прогнозируется результат
их применения. Для этого применяется режим распознавания.
Итак, в подсистеме выработки управляющих воздействий основным является
режим вывода информационных портретов (решения обратной задачи декодирования), а
режим распознавания вспомогательным.
Следовательно, в подсистемах идентификации (мониторинга) и выработки
управляющих воздействий практически может быть применена одна и та же система
распознавания образов. Однако в этих подсистемах система распознавания используется
по–разному и в ней обрабатывается различная информация:
в системе идентификации используется режим распознавания;
в подсистеме выработки управляющих воздействий режим вывода информационных
портретов (обратная задача распознавания).
В обеих подсистемах используются режимы обучения с учителем (экспертом) и верификации решающих правил. Без обучения
основные режимы вообще не работают, а без верификации работают, но неизвестно как.
3.2. АЛГОРИТМ СИНТЕЗА ААСУ СС
Рассмотрим подробнее предлагаемый авторами алгоритм синтеза
адаптивных АСУ сложными объектами с применением модели
распознавания образов.
Основная идея предлагаемого алгоритма состоит в том, что применение
обучающейся с учителем (экспертом) адаптивной модели позволяет выявить
информационные зависимости между факторами и целевыми состояниями
объекта управления, т.е. фактически конкретизировать абстрактную модель
СОУ, построить его модель и осуществить синтез АСУ (рис. 6.1).
Рис. 3. 1. Алгоритм синтеза
адаптивной АСУ сложными системами
Шаг 1–й (формальная постановка задачи): для начала работы по
конкретизации
модели
СОУ
разрабатывают
описательные
и
классификационные шкалы, необходимые для формализованного описания
предметной области. Описательные шкалы описывают признаки прошлых и
актуальных состояний среды и объекта управления, а классификационные –
все возможные, в том числе целевые, будущие состояния СОУ.
Шаг 2–й (формирование обучающей выборки): информация о состоянии
среды и объекта управления, а также вариантах управляющих воздействий
поступает на вход подсистемы обучения с учителем. Работа по
преобразованию информации о вариантах управляющего воздействия в
формализованный вид (кодирование) осуществляется оператором,
обслуживающим систему. При этом используются описательные шкалы,
позволяющие описать в формализованном виде варианты управляющих
воздействий, а также состояния среды и сложного объекта управления.
Кроме
того,
экспертами
(дополнительно)
с
использованием
классификационных шкал сообщается системе, к каким результатам на
практике приводят те или иные управляющие воздействия на объект
управления, находящийся в определенном актуальном состоянии и в данной
окружающей среде.
Вся эта информация представляется в виде специальных кодированных
бланков, используемых также для ввода информации в компьютер. В
результате ее ввода в базы данных получается так называемая "обучающая
выборка".
Шаг 3–й (обучение): обучающая выборка обрабатывается обучающим
алгоритмом, на основе чего им формируются решающие правила
(обобщенные образы состояний СОУ, отражающие весь спектр будущих
возможных состояний объекта управления), а также определяется ценность
факторов для решения задач подсистемы идентификации, мониторинга и
прогнозирования.
Шаг 4–й (оптимизация): факторы, не имеющие особой прогностической
ценности, корректным способом удаляются из системы. Данный процесс
осуществляется с помощью итерационных алгоритмов, при этом
обеспечивается выполнение ряда ограничений, таких как результирующая
размерность пространства факторов, его информационная избыточность и
т.п.
Шаг 5–й (подготовка данных для типологического анализа):
формирование решающих правил не является единственным результатом
работы подсистемы обучения. Эта система готовит также исходные данные
для типологического анализа, который включает: информационные
портреты, кластерно–конструктивный анализ, семантические сети, а также
когнитивные диаграммы состояний СОУ и факторов [196].
Шаг 6–й (адаптация модели). В подсистеме идентификации предусмотрен режим
дозаписи распознаваемой выборки к обучающей, чтобы в последующем, когда станет
известна степень адекватности прогноза результатов управления, этой верифицированной
(т.е. достоверной) оценочной информацией дополнить обучающую выборку и
переформировать решающие правила (обучающая обратная связь). При адаптации могут
быть легко изменены и описательные, и классификационные (оценочные) шкалы, что
позволяет плавно расширить или изменить сферу функционирования адаптивной АСУ
СОУ.
Шаг 7–й (верификация модели): если решающие правила построены (на шаге 3) и
оптимизированы (на шаге 4), но качество их работы неизвестно, то пользоваться ими для
принятия решений было бы опрометчиво. Верификация решающих правил основана на
использовании внутреннего критерия качества алгоритма распознавания и может быть
выполнена в любой момент, например по требованию экспертов, но в обязательном
порядке после каждой адаптации. Для выполнения данной функции обучающая выборка
копируется в распознаваемую, осуществляется ее автоматическая классификация (в
режиме распознавания), результаты автоматической классификации сравниваются с
независимой экспертной классификацией. На основе этого рассчитывается так называемая
внутренняя дифференциальная и интегральная валидность, которая является,
соответственно, детализированной и обобщающей характеристиками качества решающих
правил (все эти работы полностью автоматизированы).
Если результаты верификации конкретной модели СОУ удовлетворяют
разработчиков адаптивной АСУ и заказчиков, то АСУ переводится из
пилотного режима, при котором управляющие решения генерировались, но
не исполнялись, в режим опытно–производственной эксплуатации, когда они
реально начинают использоваться для управления. Если же модель признана
недостаточно адекватной, то необходимо расширять перечень факторов (так
как значимые факторы могли быть упущены из анализа), увеличивать объем
обучающей выборки, исключать артефакты, пересматривать экспертные
оценки и переформировывать коллектив экспертов, а также предпринимать
другие действия для улучшения качества модели (повторять шаги 1 – 7).
Необходимо отметить, что когда конкретная информационная модель
СОУ построена и оптимизирована, то разработать на ее основе
содержательную аналитическую или другую статическую модель
детерминистского типа, например, регрессионную, уже достаточно просто.
Таким образом, предложены методология и конкретный алгоритм
применения системы распознавания образов и принятия решений,
основанных на теории информации, для синтеза адаптивных АСУ СОУ,
обеспечивающих решение следующих задач:
- формирование обобщенных образов состояний СОУ на основе обучающей
выборки (обучение);
- идентификация состояния СОУ на основе его выходных параметров
(распознавание);
- определение влияния входных параметров на перевод СОУ в различные
состояния (обратная задача распознавания);
- прогнозирование поведения СОУ в условиях полного отсутствия
управляющих воздействий;
- прогнозирование поведения СОУ при различных вариантах управляющих
воздействий.
Выявленные в результате работы адаптивных АСУ зависимости
входных и выходных параметров сложных объектов управления позволяют,
при условии статичности этих закономерностей, построить АСУ с
постоянной моделью.
3.3. МЕТОДИКА СИНТЕЗА ААСУ СС.
ПРИМЕР СИНТЕЗА АДАПТИВНОЙ САУ
ФОТОВЕТРОЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ
УСТАНОВКОЙ
Рассмотрим применение предложенной методологии для синтеза операционного
уровня систем автоматического управления (САУ) автономными комбинированными
фотоветроэлектроэнергетическими установками (ФВЭУ), представляющими собой
типичный пример сложной технической системы.
В соответствии с приведенным выше общим алгоритмом синтеза ААСУ СС и
основываясь на результатах работы [316] рассмотрим численный пример синтеза САУ
ФВЭУ с применением предложенных в данной работе математической модели и
алгоритма.
Шаг 1-й: сконструируем классификационные и описательные шкалы (табл. 3.1 и
3.2):
Таблица 3. 1
КЛАССИФИКАЦИОННАЯ ШКАЛА
(РЕЖИМЫ ЭНЕРГОРАСПРЕДЕЛЕНИЯ)
№
п/п
1
2
3
4
5
6
7
8
9
10
11
Наименование градации
Режим– 1:
Режим– 2:
Режим– 3:
Режим– 4:
Режим– 5:
Режим– 6:
Режим– 7:
Режим– 8:
Режим– 9:
Режим–10:
Режим–11:
все
2–4
3–4
4
3
все
2–4
3–4
4
3
все
группы
группы
группы
группа
группа
группы
группы
группы
группа
группа
группы
потребителей
потребителей
потребителей
потребителей
потребителей
потребителей
потребителей
потребителей
потребителей
потребителей
потребителей
откл.
откл.
откл.
откл.
откл.
ПОДКЛ.
откл.
откл.
откл.
откл.
ПОДКЛ.
Заряд
Заряд
Заряд
Заряд
Заряд
Заряд
Разряд
Разряд
Разряд
Разряд
Разряд
накопителя
накопителя
накопителя
накопителя
накопителя
накопителя
накопителя
накопителя
накопителя
накопителя
накопителя
Таблица 3. 2
ОПИСАТЕЛЬНЫЕ ШКАЛЫ (ФАКТОРЫ)
Кодирование
Наименования шкал градаций
Шкала 1: "Текущий баланс энергосистемы"
1
1
> 0 для 1–й, 2–й, 3–й, 4–й групп нагрузок
2
2
> 0 только для 1–й, 2–й, 3–й групп нагрузок
X
3
3
> 0 только для 1–й, 2–й групп нагрузок
4
4
> 0 только для 1–й группы нагрузок
5
5
< 0 для 1–й группы нагрузок
Шкала 2: "Состояние заряженности аккумуляторной батареи"
1
6
Накопитель полностью заряжен 95% <= Q <= 100%
2
7
Накопитель хорошо
заряжен 75% <= Q <
95%
Y
3
8
Накопитель слабо
заряжен 30% <= Q <
75%
4
9
Накопитель полностью разряжен 0% <= Q <= 30%
Шкала 3: "Прогноз поступления возобновляемой энергии"
1
10
Прогнозируемый интегральный баланс положителен
Z
2
11
Прогнозируемый интегральный баланс отрицателен
Шаг 2-й: с использованием приведенных выше шкал представим
экспертные оценки целесообразности выбора различных режимов
энергораспределения из работы [316] в форме, соответствующей
требованиям обработки информации в автоматизированных системах
(табл. 3.3):
Таблица 3. 3
ОБУЧАЮЩАЯ ВЫБОРКА
№
п/п
Факторы
X
Y
Z
Режимы
№
энергораспределения
п/п
Факторы
X
Y
Z
Режимы
энергораспределения
1
1
6 10 11
21 1
6 11 6
2
1
7 10 10 11
22 1
7 11 5
6
3
1
8 10 9 10 11
23 1
8 11 4
5
6
4
1
9 10 8
24 1
9 11 3
4
5
5
2
6 10 10 11
25 2
6 11 5
6
6
2
7 10 9 10 11
26 2
7 11 4
5
6
7
2
8 10 8
9 10 11
27 2
8 11 3
4
5
6
8
2
9 10 7
8
28 2
9 11 2
3
4
5
9
3
6 10 9 10 11
29 3
6 11 4
5
6
10 3
7 10 8
9 10 11
30 3
7 11 3
4
5
6
11 3
8 10 7
8
9 10 11
31 3
8 11 2
3
4
5
6
12 3
9 10 1
7
8
32 3
9 11 1
2
3
4
5
13 4
6 10 8
9 10 11
33 4
6 11 3
4
5
6
14 4
7 10 7
8
9 10 11
34 4
7 11 2
3
4
5
6
15 4
8 10 1
7
8
9 10 11
35 4
8 11 1
2
3
4
5
16 4
9 10 1
1
7
8
36 4
9 11 1
1
2
3
4
17 5
6 10 7
8
9 10 11
37 5
6 11 2
3
4
5
6
18 5
7 10 1
7
8
9 10 11
38 5
7 11 1
2
3
4
5
6
19 5
8 10 1
1
7
8
9 10 11
39 5
8 11 1
1
2
3
4
5
6
20 5
9 10 1
1
1
7
8
9 10 11 40 5
9 11 1
1
1
2
3
4
5
9 10 11
9 10 11
9 10 11
9
6
6
6
6
6
Шаг 3-й: на основе математической модели, предложенной в [316], и
представленных
выше
исходных
данных
получим
матрицу
информативностей (табл. 3.4), которая показывает, какое количество
информации о целесообразности выбора того или иного режима
энергораспределения получает САУ, если установлено действие некоторого
фактора.
Данная матрица информативностей и представляет собой конкретную
информационную модель ФВЭУ, на основе которой САУ может
принимать решения о выборе наиболее целесообразного режима
энергораспределения. Выбирается тот режим, о котором в системе
факторов {X, Y, Z} содержится максимальное количество информации
(табл. 3.5):
Таблица 3. 4
МАТРИЦА ИНФОРМАТИВНОСТЕЙ
Факторы
№
п/п
1
2
3
4
5
6
1
–––
–––
–0,39
0,13
0,39
–––
Режимы энергораспределения ФВЭУ
2
3
4
5
6
7
8
9
––– ––– 0,05 0,21 0,34 ––– ––– 0,05
––– ––– 0,10 0,20 0,17 ––– ––– 0,10
0,03 0,04 0,08 0,02 –0,01 0,03 0,04 0,08
0,17 0,12 ––– –0,07 –0,09 0,17 0,12 –––
0,21 ––– –0,12 –0,18 –0,21 0,21 ––– –0,12
––– –0,04 0,06 0,16 0,25 ––– –0,04 0,06
10
0,24
0,23
0,05
–0,19
–0,15
0,19
11
0,47
0,17
–0,01
–0,25
–0,21
0,25
Дифф.
мощность
0,165
0,092
0,131
0,146
0,203
0,112
7
8
9
10
11
Детермин
ированнос
ть
–0,45
0,03
0,32
–––
–0,01
–0,03
0,07
0,14
–––
0,41
–0,02
0,02
0,05
–––
0,39
0,02
0,02
–0,07
–––
0,37
0,08
–0,04
–0,13
–––
0,37
0,06
–0,07
–0,16
–––
0,37
–0,03
0,07
0,14
0,42
–––
–0,02
0,02
0,05
0,39
–––
0,02
0,02
–0,07
0,38
–––
0,11
–0,01
–0,22
0,38
–––
0,06
–0,07
–0,16
0,38
–––
0,151
0,048
0,165
0,203
0,201
0,25
0,13
0,12
0,13
0,17
0,20
0,13
0,12
0,13
0,20
0,24
0,165
Таблица 3. 5
Код
11
10
9
6
8
5
7
1
4
3
2
ВЫБОР РЕЖИМА ФВЭУ (ПРИ X=1, Y=1, Z=1)
Наименование режима
%
Гистограмма
Режим–11: все гр.потр.ПОДКЛ. Разряд АБ
80
Режим–10:
3 гр.потр. откл. Разряд АБ
67
Режим– 9:
4 гр.потр. откл. Разряд АБ
56
Режим– 6: все гр.потр.ПОДКЛ. Заряд АБ
43
Режим– 8: 3–4 гр.потр. откл. Разряд АБ
33
Режим– 5:
3 гр.потр. откл. Заряд АБ
24
Режим– 7: 2–4 гр.потр. откл. Разряд АБ
22
Режим– 1: все гр.потр. откл. Заряд АБ
–1
Режим– 4:
4 гр.потр. откл. Заряд АБ
–5
Режим– 3: 3–4 гр.потр. откл. Заряд АБ
–33
Режим– 2: 2–4 гр.потр. откл. Заряд АБ
–42