ОПТИМАЛЬНОЕ РАСПОЛОЖЕНИЕ УЗЛОВ
advertisement

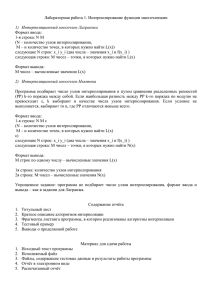
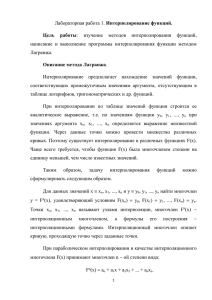
Синтез механизмов УДК 621.01 Э.Е. ПЕЙСАХ ОПТИМАЛЬНОЕ РАСПОЛОЖЕНИЕ УЗЛОВ ИНТЕРПОЛИРОВАНИЯ ПРИ СИНТЕЗЕ ЦИКЛОВЫХ И НЕЦИКЛОВЫХ РЫЧАЖНЫХ МЕХАНИЗМОВ Введение При синтезе передаточных рычажных механизмов решается задача о приближении функции перемещения, воспроизводимой проектируемым механизмом, к заданной функции на заданном отрезке. Известны различные методы аналитического синтеза, основанные на математической теории приближения функций. В литературе по теории механизмов описаны, в частности, следующие методы [1]: интерполирование, квадратическое приближение, наилучшее приближение (или приближение по Чебышеву). При интерполировании искомые параметры механизма определяются из такого условия: две указанных выше функции должны совпадать в n точках, называемых узлами интерполирования. При квадратическом приближении или наилучшем приближении искомые параметры механизма определяются из условия обращения в минимум соответственно среднего квадратического отклонения или максимального отклонения от заданной функции на заданном отрезке. В математическом отношении наиболее простым является метод интерполирования, наиболее сложным – метод наилучшего приближения. По этой причине многие задачи синтеза удалось решить аналитически только при помощи метода интерполирования. Что касается методов квадратического приближения и наилучшего приближения, то их не удаётся реализовать в аналитической форме и в "чистом" виде (то есть без упрощающих допущений) даже для простейших задач синтеза из-за возникающих математических трудностей. Между тем, упомянутые упрощающие допущения вносят существенные коррективы в первоначальную постановку задачи и поэтому приводят к заметным отклонениям получаемых решений от теоретически ожидаемых результатов. Отметим, что даже после введения упрощающих допущений в постановку задачи её решение всё равно оказывается более сложным в сравнении с методом интерполирования. В данной статье показано, что при синтезе рычажных механизмов на основе метода интерполирования можно получить такой результат, при котором достигается минимум среднего квадратического или максимального отклонения от заданной функции на заданном отрезке. Указанный результат обеспечивается за счёт оптимального расположения узлов интерполирования. Описывается итерационная процедура поиска, обеспечивающая определение оптимального расположения узлов интерполирования. Таким образом, метод интерполирования в соединении с оптимальным расположением узлов интерполирования позволяет получить решения, которые соответствуют исходным условиям задачи синтеза механизмов по методу квадратического приближения или наилучшего приближения (без упрощающих допущений), но которые не удаётся найти двумя указанными методами из-за математических трудностей. Предлагаемая методика синтеза передаточных рычажных механизмов излагается на примере четырёхзвенного пространственного механизма ВССП (рис. 1). Требуется найти такие значения постоянных параметров механизма ВССП, при которых функция перемещения s s () выходного звена 4 будет мало отличаться от заданной функции S S () на заданном отрезке [0, ] . Здесь: угол поворота входного звена 2. Неизвестные постоянные параметры механизма определяются по методу интерполирования аналитически на основании соответствующего алгоритма в предположении, что узлы интерполирования известны. Задача решается для случая, когда число узлов интерполирования n 6 . Рассмотрены два типа задач синтеза передаточных механизмов: синтез цикловых механизмов (когда 2 ) и синтез нецикловых механизмов (когда 0 2 ). 22 http://tmm.spbstu.ru Оптимальное расположение узлов интерполирования … В узлах интерполирования функции s s () и S S () совпадают. Степень близости двух указанных функций на интервалах, расположенных между узлами интерполирования, зависит от выбора этих узлов. Описанная в статье методика выбора узлов интерполирования позволяет найти такое их расположение, при котором достигается минимум одного из двух критериев – максимального отклонения max или среднеквадратического отклонения q . Здесь речь идёт об отклонении функции перемещения s s () от заданной функции S S () при [0, ] . В статье рассмотрены также другие вопросы синтеза механизма ВССП: условия существования механизма на заданном отрезке; исключение "дефекта ветвления"; свойство кинематической эквивалентности и его использование; выбор наиболее оптимального значения свободного параметра (одного из постоянных параметров механизма), при котором достигается минимум максимального угла давления. В прилагаемом к статье библиографическом списке приведены публикации, в которых рассмотрены отдельные вопросы, относящиеся к теме статьи, в частности: общие проблемы аппроксимационного синтеза рычажных механизмов [1, 11], синтез механизма ВССП [2, 3, 5-7, 9-12, 14-17], анализ и области существования механизма ВССП [18], расположение узлов интерполирования [1, 4, 8, 11, 13], учёт угла давления при синтезе механизма ВССП [6, 7, 12, 15, 17], свойство кинематической эквивалентности для структуры ВССП [15, 17, 18], проблема дефекта ветвления при синтезе [14, 15]. Функция перемещения механизма ВССП Введём следующие обозначения (рис. 1): неподвижная система координат; неподвижная ось, направленная по прямой, проходящей через точки D и C (DX Oy); постоянные параметры механизма ВССП; h1, h2, h3, l12, 1 угловая координата входного звена 2 (угол откладывается от оси Oy против часовой стрелки, если смотреть с конца оси Ox); X координата точки C выходного звена 4, измеряемая вдоль неподвижной оси DX; 0, X0 начальные значения угла и координаты X; угол поворота входного звена ( 0 ); s перемещение выходного звена ( s X X 0 ); Oxyz DX X X ( ) s s () функция положения выходного звена; функция перемещения выходного звена. Постоянные параметры механизма должны удовлетворять таким условиям: h1 0 , h2 0 , h3 0 , l12 0 , cos 1 0 . (1) Условие cos 1 0 связано с тем, что исключается из рассмотрения плоский меха- низм ВССП, для которого cos 1 0 . Зависимость между входом и выходом X механизма ВССП, представленная в неявном виде, выражается следующим уравнением: F (, X ) X 2 2B1 () X B2 () 0 , Теория Механизмов и Машин. 2005. №2. Том 3. (2) 23 Синтез механизмов Рис. 1. Механизм ВССП где B1 () h2 sin 1 sin l12 cos 1 ; (3) 2 B2 () h12 h22 l12 h32 2h1h2 cos . Разрешая уравнение (2) относительно X, получаем функцию положения механизма: X () B1 () M D1 () , (4) где D1 () дискриминант квадратного уравнения (2), определяемый по формуле D1 () B1 ()2 B2 () ; (5) M – признак сборки механизма, который может быть равен +1 или 1 и находится по формуле: M sign( BC u 3 ) 1 или - 1 . (6) В качестве начального положения выходного звена выбрано такое его положение, которое это звено занимает при заданном начальном положении входного звена механизма. Вследствие этого выполняется условие: X 0 X ( 0 ) . Из этого условия на основании равенства (2) получаем соотношение: 2 X 02 2(h2 sin 1 sin 0 l12 cos 1 ) X 0 h12 h22 l12 h32 2h1h2 cos 0 0 . (7) Отсюда видно, что один из семи параметров h1, h2, h3, l12, 1, X0, 0 является зависимым от других шести. В качестве зависимого параметра выбираем h3. Тогда параметры h1, h2, l12, 1, X0, 0 будут взаимно независимыми. Из равенства (7) находим: h32 ( X 0 l12 cos 1 h2 sin 1 sin 0 ) 2 (h1 h2 cos 0 ) 2 (l12 sin 1 h2 cos 1 sin 0 ) 2 . (8) С учётом равенства (8) преобразуем формулу (3) для B2 () : 24 http://tmm.spbstu.ru Оптимальное расположение узлов интерполирования … B2 () 2h1h2 cos 2h1h2 cos 0 X 02 2 X 0 (h2 sin 1 sin 0 l12 cos 1 ) . (9) При указанном выше выборе шести постоянных взаимно независимых параметров признак сборки M не может принимать произвольного значения, а определяется по формуле: M sign h2 sin 1 sin 0 l12 cos 1 X 0 . (10) Функция перемещения механизма, представленная в неявном виде, выражается следующим уравнением: G(, s) s 2 2s( A1 () X 0 ) X 02 2 A1 () X 0 A2 () 0 , (11) где A1 () h2 sin 1 sin( 0 ) l12 cos 1 ; A2 () 2h1h2 cos( 0 ) 2h1h2 cos 0 X 02 2 X 0 (h2 sin 1 sin 0 l12 cos 1 ) . (12) Разрешая уравнение (11) относительно s, получаем функцию перемещения механизма: s() ( A1 () X 0 ) M D() , (13) где дискриминант D() определяется по формуле: D() A1 ()2 A2 () . (14) Механизм существует при данном и не находится в мёртвом положении, если выполняется условие D() 0 . (15) Из равенств 0 , s X X 0 и X 0 X ( 0 ) следует, что s (0) 0 . Семейство кинематически эквивалентных механизмов ВССП Введём следующие обозначения: r1 l12 cos 1 , r2 h1h2 , r3 h2 sin 1 . (16) С учётом обозначений (16) формулы (11), (13), (14) и (10) принимают такой вид: G(, s) s 2 2sX 0 r1 r3 sin( 0 ) 2r2 cos( 0 ) cos 0 2r3 X 0 sin( 0 ) sin 0 0 ; (17) s() ( X 0 r1 r3 sin( 0 ) M D() ; (18) D() X 0 r1 r3 sin( 0 )2 2r2 cos( 0 ) cos 0 2r3 X 0 sin( 0 ) sin 0 ; M sign X 0 r1 r3 sin 0 . (19) (20) Отсюда видно, что функция перемещения s s () зависит от пяти постоянных параметров r1 , r2 , r3 , 0 , X 0 . В то же время в прежнем выражении (13) для функции перемещения s s () фигурировало шесть параметров h1, h2, l12, 1, 0, X0. Таким образом, все механизмы структуры ВССП, у которых четыре постоянных параметра h1, h2, l12, 1 удовлетворяют трём соотношениям (16) (при условии, что параметры r1 , r2 , r3 , 0 , X 0 заданы) вос- Теория Механизмов и Машин. 2005. №2. Том 3. 25 Синтез механизмов производят одну и ту же функцию перемещения (18). Будем считать, что все такие механизмы образуют некоторое семейство механизмов. Все механизмы ВССП, входящие в данное семейство, будем называть кинематически эквивалентными. Поскольку число соотношений (16) на единицу меньше числа параметров h1, h2, l12, 1, то указанное семейство механизмов является однопараметрическим. В качестве параметра этого семейства может быть взят любой из постоянных параметров h1, h2, l12, 1 механизма. Примем h2 в качестве параметра семейства. Величины r1 , r2 , r3 , 0 , X 0 , определяющие некоторое семейство кинематически эквивалентных механизмов ВССП, будем называть базисными константами данного семейства. Базисные константы r1 , r3 , 0 , X 0 могут иметь произвольные значения, а константа r2 должна быть неотрицательной, то есть r2 0 . Параметр h2 семейства должен удовлетворять условию h2 r3 . Используя соотношения (16), выразим постоянные параметры h1, l12, 1 механизмов, принадлежащих указанному выше семейству, через базисные константы r1 , r2 , r3 в функции параметра семейства h2: h1 r r r2 , sin 1 3 , cos 1 1 1 sin 2 1 , l12 1 , h2 h2 cos 1 (21) где sign( r1 ) если r1 0, 1 1 or 1 если r1 0. (22) На основании формул (8) и (21) выразим зависимый постоянный параметр h3 через базисные константы r1 , r2 , r3 , 0 , X 0 и параметр семейства h2 : h32 h22 r22 h22 r12 r32 h22 r32 ( X 0 r1 ) 2 2r3 X 0 sin 0 2r2 cos 0 . (23) Угол давления Угол давления в механизме ВССП – это острый угол между осью X движения ползуна и линией, проходящей через центры B и C сферических шарниров (см. рис. 1). Угол давления характеризует качество передачи движения и сил от входного звена 2 к выходному звену 4. Условия передачи движения и сил более благоприятны при приближении угла давления к нулю и менее благоприятны – при его приближении к 90. При 90 передача движения невозможна. Угол давления находится по формуле: () arccos D() h3 . (24) Из формулы (24) видно, что разные механизмы, принадлежащие одному и тому же семейству кинематически эквивалентных механизмов ВССП, имеют различные значения угла давления , так как параметр h3 зависит от выбора значения параметра семейства h2 . Постановка задачи синтеза механизма ВССП Задана функция S S () , 0 (здесь: 0 2 ). Заданная функция должна удовлетворять условию: S (0) 0 . Требуется найти такие значения постоянных параметров 26 http://tmm.spbstu.ru Оптимальное расположение узлов интерполирования … механизма, при которых функция перемещения s s () будет мало отличаться от заданной функции S S () на заданном отрезке [0, ] . Сформулированное требование назовём основным условием синтеза. В зависимости от величины заданного отрезка [0, ] , будем различать два типа задач синтеза передаточных механизмов: синтез цикловых механизмов (когда 2 ) и синтез нецикловых механизмов (когда 0 2 ). При синтезе цикловых механизмов заданная функция S S () должна удовлетворять условию: S (2) S (0) 0 . В данной статье рассматриваются оба указанных выше типа задач синтеза. Кроме основного условия синтеза должны быть учтены также и дополнительные условия, которые мы разделим на обязательные и желательные. Обязательные условия: 1) отсутствие разрыва кинематической цепи механизма на всём заданном отрезке [0, ] изменения угла поворота входного звена; 2) отсутствие "дефекта ветвления" (механизм должен оставаться в одной и той же сборке на всём заданном интервале движения). При решении задачи будем учитывать одно желательное условие синтеза: необходимо стремиться к уменьшению максимального угла давления max . Задача синтеза решается в два этапа. На первом этапе учитываются основное условие и обязательные условия синтеза и осуществляется синтез семейства кинематически эквивалентных механизмов ВССП. Целью синтеза на этом этапе является поиск базисных констант r1 , r2 , r3 , 0 , X 0 семейства. На втором этапе учитывается желательное условие синтеза и ставится задача поиска такого оптимального значения параметра h2 семейства, при котором достигается минимум максимального угла давления max (величина max является функцией только одного параметра h2 ). В результате второго этапа определяется один конкретный механизм среди механизмов синтезированного семейства. Функция отклонений Для оценки качества полученного решения задачи синтеза вводится в рассмотрение функция отклонений () . Она определяется по формуле: () s () S () , 0. (25) У найденного в результате синтеза механизма функция отклонений () должна мало отличаться от нуля на всём заданном отрезке. Предельные отклонения Для оценки качества приближения функции перемещения s s () механизма к заданной функции S S () на заданном отрезке [0, ] будем использовать экстремальные значения функции отклонений () . Экстремумы (минимумы и максимумы) функции отклонений будем называть предельными отклонениями от нуля. Введём обозначения: m число точек предельных отклонений; 1 , 2 , …, m предельные отклонения; e1 , e 2 , …, em значения независимой переменной , при которых достигаются предельные отклонения. Теория Механизмов и Машин. 2005. №2. Том 3. 27 Синтез механизмов Среди m предельных отклонений выделим наибольшее по модулю, которое назовём максимальным отклонением и обозначим через max . Кроме того, введём в рассмотрение среднеквадратическое отклонение q , которое определяется по формуле q N 1 ((i )) 2 , N 1 i 0 (26) где i i ; i 0, 1, ..., N ; / N . (27) Целое число N рекомендуется назначать так, чтобы соблюдалось условие: 1 . Синтез механизма на основе метода интерполирования Для решения задачи синтеза будем использовать метод интерполирования. При интерполировании значения заданной функции S S () и функции перемещения s s () , воспроизводимой механизмом, совпадают в n точках, называемых узлами интерполирования. Введём обозначения: k , S k (k 1, 2, ...,n) заданные значения угла поворота входного звена и линейного перемещения s выходного звена в узлах интерполирования. Значения S k в узлах интерполирования определяются по формуле: S k S ( k ) , k 1, 2, ..., n . Узел интерполирования номер 1 совместим с левой границей заданного отрезка [0, ] , то есть примем: 1 0 . В случае синтеза нецикловых механизмов узел интерполи- рования номер n совмещаем с правой границей отрезка [0, ] , то есть примем: n . Что касается синтеза цикловых механизмов, то узел интерполирования номер n не совпадает с правой границей отрезка [0, ] , поскольку 2 . Дело в том, что при синтезе цикловых механизмов функция s s () является периодической с периодом 2. Поэтому левая и правая границы отрезка [0, ] соответствуют одному и тому же положению механизма и одному и тому же узлу интерполирования номер 1, но при этом считается, что на левой границе 1 0 , а на правой границе 1 2 2 . Значения k угла в узлах интерполирования удовлетворяют следующим услови- ям: а) при синтезе цикловых механизмов 1 0 , 0 2 3 ... n 2 , (28) б) при синтезе нецикловых механизмов 1 0 , 0 2 3 ... n1 , n . (29) Заметим, что S1 0 , так как S (1 ) S (0) 0 . Узлы интерполирования с номерами k 2, 3, ..., p будем называть промежуточными узлами. Число промежуточных узлов интерполирования равно p 1 . Числа p и n связаны таким соотношением: - при синтезе цикловых механизмов, n p (30) n 1 - при синтезе нецикловых механизмов. 28 http://tmm.spbstu.ru Оптимальное расположение узлов интерполирования … Выходные параметры синтеза определяются из системы уравнений s( k ) S k (k 1, 2, ..., n) . (31) Первое из уравнений (31) выполняется тождественно, так как s(1 ) s(0) 0 и S1 0 . Поэтому в дальнейшем будем рассматривать уравнения (31) для k 2, 3, ..., n . На основании равенства (17) систему уравнений (31) можно преобразовать к такому виду: G ( k , S k ) 0 (k 2, 3, ..., n) . (32) Запишем уравнения (32) в развёрнутой форме: S k2 2S k X 0 r1 r3 sin( 0 k ) 2r2 cos( 0 k ) cos 0 2r3 X 0 sin( 0 k ) sin 0 0 (k 2, 3, ..., n) . (33) Будем считать, что все пять параметров r1 , r2 , r3 , 0 , X 0 , фигурирующих в системе n 1 уравнений (33) являются неизвестными. Число уравнений будет совпадать с числом неизвестных в том случае, если принять: n 6 . Таким образом, число узлов интерполирования равно шести. Уравнения (33) являются нелинейными. Однако их можно преобразовать таким образом, что они становятся линейными. Введём обозначения: a1k S k , a 2k 1 cos k , a3k sin k , 1 a 4k S k cos k , a5k S k sin k , bk S k2 ; 2 p1 X 0 r1 , p2 r2 cos 0 r3 X 0 sin 0 , p 4 r3 sin( r5 ) , p3 r2 sin 0 r3 X 0 cos 0 , p5 r3 cos 0 . (34) (35) С учётом обозначений (34) и (35) система уравнений (33) принимает следующий вид: a1k p1 a2k p2 a3k p3 a4k p4 a5k p5 bk (k 2, 3, 4, 5, 6) . (36) Мы получили линейную систему пяти уравнений с пятью неизвестными p1 , p2 , p3 , p4 , p5 . Коэффициенты a1k , a2k , a3k , a4k , a5k и правые части bk уравнений (36) зависят от заданных величин k , S k (k 2, 3, 4, 5, 6) . Расчёт базисных констант семейства В результате решения линейной системы уравнений (36) определяются неизвестные p1 , p2 , p3 , p4 , p5 . Теперь, используя соотношения (35), выразим базисные константы r1 , r2 , r3 , 0 , X 0 искомого семейства кинематически эквивалентных механизмов через величины p1 , p2 , p3 , p4 , p5 . Получаем: r3 2 p 42 p52 , sin 0 r4 p3 p5 p 2 p 4 p 42 p52 , r2 p p4 , cos 0 5 , r3 r3 r3 ( p 2 p5 p3 p 4 ) p 42 p52 Теория Механизмов и Машин. 2005. №2. Том 3. (37) , r1 X 0 p1 , 29 Синтез механизмов где sign( p2 p5 p3 p4 ), если p2 p5 p3 p4 0, 2 1 or 1, если p2 p5 p3 p4 0. (38) Проверка условия существования механизма на заданном отрезке Синтезированный механизм должен существовать на всём заданном отрезке [0, ] изменения угла поворота входного звена (первое обязательное условие синтеза). Механизм будет существовать в том случае, если выполняется условие: D() 0 при всех [0, ] . (39) Условие (39) можно записать в другом виде: Dmin min D() 0 . (40) 0 Величину Dmin можно найти аналитически, так как уравнение d D() d 0 после соответствующих преобразований приводится к алгебраическому уравнению 4-й степени следующего вида: c0u 4 c1u 3 c2u 2 c3u c4 0 , где u sin( 0 ) ; (41) c0 , c1 , c2 , c3 , c4 коэффициенты, которые выражаются через r1 , r2 , r3 на основании формул: c 0 r34 , c1 2r1r33 , c2 r12 r32 r34 r22 , c3 c1 , c4 r12 r32 . (42) Величину Dmin можно найти также и по приближённой формуле Dmin min i 0,1,..., N D ( i ) , (43) где i последовательные значения независимой переменной (см. формулу (27)). Исключение "дефекта ветвления" Как отмечалось выше, на всём заданном интервале движения механизм должен оставаться в одной и той же сборке (второе обязательное условие синтеза). При выполнении этого условия будет отсутствовать так называемый дефект ветвления. Данное условие можно сформулировать в такой форме: в шести положениях механизма, соответствующих шести узлам интерполирования, признак сборки M должен иметь одно и то же значение. Из формулы (18) видно, что при известных значениях и s признак сборки M определяется по формуле: M (, s) sign s X 0 r1 r3 sin( 0 ) . (44) Найдём признак сборки M M (k ) в узлах интерполирования: M ( k ) M ( k , S k ) sign S k X 0 r1 r3 sin( 0 k ) (k 1, 2, ..., 6) . (45) Дефект ветвления будет исключён при выполнении следующих условий: M ( k ) M (1) sign( X 0 r1 r3 sin 0 ) 30 (k 2, 3, 4, 5, 6) . (46) http://tmm.spbstu.ru Оптимальное расположение узлов интерполирования … Определение функции перемещения и функции отклонений Предположим, что условия (40) и (46) выполняются. Это означает, что получено семейство кинематически эквивалентных механизмов ВССП. Базисные константы r1 , r2 , r3 , 0 , X 0 этого семейства определяются по формулам (37). Все механизмы, принадлежащие этому семейству, воспроизводят одну и ту же функцию перемещения s s () . Эта функция совпадает с заданной функцией S S () в шести точках (узлах интерполирования). Можно сказать, что графики функций s s () и S S () пересекаются шесть раз на заданном отрезке [0, ] . В случае синтеза цикловых механизмов функции s s () и S S () совпадают ещё и в седьмой точке, а именно: при 2 . Функция перемещения s s () для всех механизмов, принадлежащих найденному семейству, определяется по формуле (18). Расчёт производится для ряда последовательных значений аргумента , определяемых по формуле (27). Затем для тех же значений аргумента вычисляются дискретные значения функции отклонений () по формуле (25). Таким образом, функции s s () и () определяются в табличной форме. Расчёт максимального отклонения и среднеквадратического отклонения Табличное представление функции отклонений () используется для определения следующих величин: числа m предельных отклонений; самих предельных отклонений 1 , 2 , …, m ; значений e1 , e 2 , …, em независимой переменной , при которых достигаются предельные отклонения. Между двумя соседними узлами интерполирования всегда находится хотя бы одно предельное отклонение j . Отсюда следует, что число m предельных отклонений зависит от числа n узлов интерполирования и от типа решаемой задачи синтеза. Для механизма ВССП: m 5 при синтезе нецикловых механизмов; m 6 при синтезе цикловых механизмов. Как правило, предельные отклонения 1 , 2 , …, m чередуются по знаку. Расчёт предельных отклонений завершается определением максимального отклонения max и среднеквадратического отклонения q (последнее вычисляется по формуле (26)). Постановка задачи оптимального выбора узлов интерполирования Качество приближения функции перемещения s s () синтезированного механизма к заданной функции S S () на заданном отрезке [0, ] будем оценивать при помощи таких критериев, как максимальное отклонение max или среднеквадратическое отклонение q. На величину как max , так и q , влияют два фактора: 1) число n узлов интерполирования, 2) выбор координат 2 , 3 , …, p промежуточных узлов. Число n узлов интерполирования, равное в рассматриваемой задаче шести, достаточно велико. Поэтому достигается, как правило, хорошее приближение функции перемещения s s () к заданной функции S S () . Наиболее простой способ выбора промежуточных узлов это распределить узлы интерполирования равномерно на заданном отрезке [0, ] . Как показали результаты решения нескольких тестовых задач, при указанном способе выбора промежуточных узлов максиТеория Механизмов и Машин. 2005. №2. Том 3. 31 Синтез механизмов мальное отклонение max получается обычно достаточно малым. Но величина max может быть ещё уменьшена (в ряде случаев в 2-3 раза), если промежуточные узлы интерполирования 2 , 3 , …, p выбрать рациональным образом. Известна рекомендация [1, 4], в соответствии с которой узлы интерполирования выбираются в точках, совпадающих с нулями полинома Чебышева n-го порядка. При таком выборе узлов интерполирования действительно, как правило, уменьшается величина max в сравнении со случаем их равномерного распределения на заданном отрезке. Но всё же ещё остаётся возможность дальнейшего уменьшения критерия max за счёт соответствующего выбора промежуточных узлов интерполирования. Поставим задачу: найти оптимальное расположение промежуточных узлов интерполирования 2 , 3 , …, p , при котором минимизируется или максимальное отклонение max (задача 1), или среднеквадратическое отклонение q (задача 2). В качестве минимизируемой целевой функции H H ( 2 , 3 , ..., p ) будем использовать критерий max (в задаче 1) или критерий q (в задаче 2). Нужно найти такие значения варьируемых параметров 2 , 3 , …, p , при которых достигается минимум целевой функции. На основании условий (28) и (29) на варьируемые параметры накладываются ограничения в виде неравенств: 0 2 3 ... p . (47) Отметим, что в соответствии с формулой (30) при n 6 имеем: p 5 в случае синтеза нецикловых механизмов и p 6 в случае синтеза цикловых механизмов. Следовательно, число p 1 варьируемых параметров равно 4 или 5 соответственно. Однократное вычисление значения целевой функции H H ( 2 , 3 , ..., p ) при известных значениях варьируемых параметров 2 , 3 , …, p будем называть "пробой". Как следует из алгоритма, описанного в предыдущих разделах статьи, при выполнении каждой "пробы" целевой функции производятся следующие вычисления: расчёт значений S k S ( k ) для k 2, 3, ..., 6 ; расчёт коэффициентов a1k , a 2k , a3k , a 4k , a5k и bk для k 2, 3, ..., 6 по формулам (34); расчёт базисных констант r1 , r2 , r3 , 0 , X 0 семейства кинематически эквивалентных механизмов по формулам (37); расчёт Dmin и проверка условия существования (40) семейства механизмов; решение системы пяти линейных уравнений (36) и определение неизвестных p1 , p2 , p3 , p4 , p5 ; расчёт признака сборки M M (k ) в шести узлах интерполирования ( k 1, 2, ..., 6 ) по формуле (45) и проверка условий (46) с целью исключения "дефекта ветвления"; определение функции перемещения s s () и функции отклонений () в табличной форме на основании формул (18) и (25) для последовательных значений (27) аргумента в пределах от 0 до ; расчёт предельных отклонений 1 , 2 , …, m от нуля и значений e1 , e 2 , …, em независимой переменной , при которых они достигаются; определение максимального отклонения max или среднеквадратического отклонения q; 32 http://tmm.spbstu.ru Оптимальное расположение узлов интерполирования … расчёт значения целевой функции, равной max или q . Минимум целевой функции H H ( 2 , 3 , ..., p ) будем определять на основа- нии предлагаемого детерминированного метода поиска. Метод поиска При поиске применена процедура, обеспечивающая спуск к минимуму целевой функции H H ( 2 , 3 , ..., p ) за несколько итераций. Первоначальные значения k ( 0) варьируемых параметров k равномерно распреде- лены на заданном отрезке [0, ] и определяются по формуле: k (k 2, 3, ..., p) . ( 0) (k 1) ( p) Результатом поиска на j-й итерации являются новые значения k варьируемых параметров k ( j 1, 2, ...; k 2, 3, ..., p ) . Поиск организован таким образом, что значение ( j) H ( j ) H ( (2 j ) , 3( j ) , ..., (pj ) ) целевой функции в конце j-й итерации меньше чем в её начале. Поиск на каждой итерации производится в ограниченной области варьируемых параметров 2 , 3 , …, p . Эта область представляет собой ( p 1) -мерный "куб". Ребро "куба" имеет длину 2 d ( j ) , где j – порядковый номер итерации. Величина d (1) назначается пользователем. Величина d ( j ) при j 1 определяется по формуле: d ( j ) 1 ( j 1) d . От2 сюда видно, что ребро "куба" с каждой новой итерацией уменьшается вдвое. ( j 1) ( j 1) На j-й итерации центр "куба" имеет координаты: 2 , 3 , …, (pj 1) . Отсюда видно, что положение "куба" в ( p 1) -мерном пространстве варьируемых параметров на рассматриваемой итерации зависит от результатов поиска, достигнутых на предыдущей итерации. Приведённые выше данные о координатах центра "куба" и размере его ребра позволяют найти промежуток [a k , bk ] , в пределах которого может изменяться варьируемый параметров k на j-й итерации. Левая и правая границы указанного промежутка определяются по формулам: a k( j ) (k j 1) d ( j ) , bk( j ) (k j 1) d ( j ) ( k 2, 3, ..., p ; j 1, 2, ... ). (48) Покроем рассматриваемый ( p 1) -мерный "куб" пространственной сеткой с шагом d ( j ) . Узлы сетки возьмём в точках с координатами k a k( j ) , 1 ( j) a k bk( j ) , bk( j ) 2 (k 2, 3, ..., p) . Общее число узлов сетки равно N1 3 p1 . В случае синтеза цикловых механизмов N1 35 243 , а при синтезе нецикловых механизмов N1 34 81 . Теперь определяем значения целевой функции H во всех узлах сетки (т. е. применяем метод сканирования выбранной области). Сравнивая N1 полученных чисел между собой, найдём среди них наименьшее. Это наименьшее значение целевой функции обозначим через H ( j ) . Соответствующие значения переменных 2 , 3 , …, p обозначим через (2j ) , Теория Механизмов и Машин. 2005. №2. Том 3. 33 Синтез механизмов 3( j ) , …, (pj ) и примем их в качестве оптимальных значений варьируемых параметров, найденных на j-й итерации. Шаг сетки d (1) для первой итерации рекомендуется принять равным (4 p) . В этом случае в процессе поиска не будут нарушаться условия (47). Но можно и увеличить значение шага d (1) , но не более чем до (3 p) . Последовательные значения H (1) , H (2) , H (3) , ..., получаемые в процессе поиска, уменьшаются и сходятся к некоторому пределу. Этот предел является одним из локальных минимумов целевой функции. Но часто найденный локальный минимум оказывается одновременно и глобальным минимумом. Таким образом, в результате поиска мы получаем наиболее оптимальное расположение промежуточных узлов интерполирования. Поиск минимума целевой функции прекращается, когда шаг сетки d на текущей итерации становится меньше заданной малой величины d lim . Из этого условия можно найти необходимое число итераций, которое мы обозначим через J. Нетрудно показать, что J – это целое число, удовлетворяющее условию: L 1 J L 2 , где L log 2 (4 p d lim ) . При 360 , p 6 , d lim 0.1 получаем: J 9 . Таким образом, общее число "проб" T целевой функции H при описанном выше детерминированном методе поиска её минимума составляет: T J N1 . Пусть J 9 , N1 243 . Тогда находим: T 2187 . В случае, когда в качестве целевой функции выбрано максимальное отклонение max , наблюдается обычно не только уменьшение max , но и сокращение разности между наибольшим и наименьшим среди модулей предельных отклонений 1 , 2 , …, m . В пределе указанная разность стремится к нулю. Это означает, что все m предельных отклонений становятся равными друг другу по модулю, чередуясь при этом по знаку. Выравнивание модулей предельных отклонений, вместе с чередованием их знака, свидетельствует о том, что описанная выше методика синтеза рычажных механизмов (аналитический синтез по методу интерполирования + оптимальный выбор промежуточных узлов интерполирования) приводит к получению такого же результата, который получался бы при его синтезе по методу наилучшего равномерного приближения (по Чебышеву). Как известно, метод синтеза рычажных механизмов по Чебышеву описан лишь теоретически [1], но его не удалось реализовать в аналитической форме даже для простейших задач синтеза из-за возникающих математических трудностей. Выбор механизма, оптимального по углу давления На первом этапе решения рассматриваемой задачи было получено семейство кинематически эквивалентных механизмов ВССП. Перейдём ко второму этапу решения задачи. Цель второго этапа – поиск такого оптимального значения параметра h2 найденного семейства, при котором достигается минимум максимального угла давления max (минимаксная задача). В результате второго этапа мы должны найти один конкретный механизм ВССП. Максимальный (наименее благоприятный) угол давления max на заданном отрезке [0, ] получаем на основании формулы (24): Dmin max arccos h3 34 . (50) http://tmm.spbstu.ru Оптимальное расположение узлов интерполирования … Величина Dmin определена ранее (она является одинаковой для всех механизмов, принадлежащих найденному семейству). Из формулы (50) видно, что разные механизмы семейств имеют различные значения максимального угла давления max , так как max зависит от параметра h3 . В свою очередь, h3 зависит от выбора значения параметра семейства h2 . Минимальное значение максимального угла давления max определяется по формуле: Dmin ( max ) min arccos (h3 ) min . (51) Отсюда видно, что для определения ( max ) min нужно найти минимум функции h3 h3 (h2 ) и значение h2 (h2 ) opt , при котором достигается этот минимум. Искомый минимум определяется из уравнения d h3 d h2 0 . Для составления указанного уравнения используется зависимость (23). После соответствующих преобразований получаем уравнение 4-й степени следующего вида: v 4 2r32 v 3 (r34 r22 r12 r32 )v 2 2r22 r32 v r22 r34 0 , (52) где v h22 . Можно показать, что уравнение (52) всегда имеет один вещественный корень, удовлетворяющий условию v r32 . Найдём указанный корень, обозначив его через v opt . Далее вычисляем (h2 ) opt v opt и (h3 ) min h3 (( h2 ) opt ) . Таким образом, задача поиска одного оптимального (по углу давления) механизма среди механизмов семейства решена аналитически, так как она сводится к определению корней алгебраического уравнения (52) 4-й степени. Синтез механизма завершается определением всех семи его постоянных параметров. Четыре из них, а именно X 0 , 0 , h2 и h3 , уже найдены. Три других постоянных параметра h1 , l12 , 1 определяются по формулам (21). Пример 1 (синтез нециклового механизма) Пусть требуется воспроизвести функцию S () 2 225 , 0 75 , при помощи механизма ВССП. Исходные данные: 75 , p 5 , N 75 , d 3.75 , d lim 0.01 . Первый и шестой узлы интерполирования являются фиксированными и имеют координаты: 1 0 , S1 0 ; 6 75 , S 6 25 . Узлы интерполирования с номерами 2, 3, 4, 5 являются промежуточными. В таблице 1 приведены результаты решения задачи синтеза для четырёх вариантов выбора четырёх промежуточных узлов интерполирования: 1) равномерное распределение промежуточных узлов на заданном отрезке [0, 75] ; 2) выбор узлов в точках, совпадающих с нулями полинома Чебышева 6-го порядка; 3-4) предлагаемый метод поиска оптимального решения при H max или H q соответственно. Каждому из четырёх полученных решений соответствует определённое семейство кинематически эквивалентных механизмов ВССП. Все механизмы, принадлежащие какомулибо семейству, воспроизводят одну и ту же функцию положения s s () . Из данных, приведённых в таблице 1, видно, что механизмы всех шести семейств обеспечивают высокое качество приближения функции положения к заданной функции. Теория Механизмов и Машин. 2005. №2. Том 3. 35 Синтез механизмов Таблица 1 Результаты синтеза механизма ВССП (пример 1) 1 , 2 , 3 , 4 , 5 max , q (1.65, 0.63, 0.56, 1.03, 4.45 10 5 , Варианты решения 2 , 3 , 4 , 5 Равномерное распределение 15, 30, 45, 60 Нули полинома Чебышева 6-го порядка 10.05, 27.45, 47.55, 64.95 (0.90, 1.12, 1.51, 2.02, Поиск на основе условия: max min 11.85, 30.78, 50.65, 66.42 (1.60, 1.60, 1.60, 1.60, Поиск на основе условия: q min 12.81, 30.50, 49.23, 64.82 (1.68, 1.26, 1.27, 1.46, 4.45) 10 5 1.49 10 5 2.51) 10 5 1.18 10 5 1.60) 10 5 2.20) 10 5 2.51 10 5 , 1.60 10 5 , 1.13 10 5 2.20 10 5 , 1.08 10 5 Но наилучшим, с точки зрения критерия max , является третье семейство. Так, для механизмов этого семейства отношение максимального отклонения max 1.60 10 5 к 6 размаху движения ведомого звена S 6 25 равно 0.64 10 . У механизмов третьего семейства все пять предельных отклонений равны по модулю и чередуются по знаку. Следовательно, получено наилучшее (чебышевское) приближение. В результате оптимизационного поиска максимальное отклонение max уменьшено в 4.45/1.60 = 2.78 раза, а среднеквадратическое отклонение q – в 1.49/1.08 = 1.38 раза. На рис. 2 приведён график функции отклонений () для механизмов третьего семейства. Семейство кинематически эквивалентных механизмов является однопараметрическим. От выбора параметра h2 семейства зависит, в частности, значение максимального уг- ла давления max . На рис. 3 показан график зависимости max от параметра h2 для механизмов третьего семейства. Среди механизмов, принадлежащих каждому из шести семейств, был найден один механизм с наименьшим значением максимального угла давления max . Ниже приведены данные, характеризующие синтезированный механизм, принадлежащий третьему семейству: постоянные параметры h1 0.531 , h2 78.947 , h3 154.069 , l12 547.571 , 1 351.7960 , X 0 399.163 , 0 89.4654 ; признак сборки M 1 ; максимальный угол давления max 38.35 . Время вычислений для разных вариантов составляет не более 6 секунд (производительность компьютера: 2.5 GHz). 36 http://tmm.spbstu.ru = () Оптимальное расположение узлов интерполирования … max Рис. 2. График функции отклонений () (для примера 1) h2 Рис. 3. График функции max f (h2 ) (для примера 1) Пример 2 (синтез циклового механизма) Пусть требуется воспроизвести функцию (угол в градусах) 9 при 0 160 , 501 cos 8 S () 501 cos 9( 160) при 160 360 10 при помощи механизма ВССП. На рис. 4 показан график заданной функции S S () . Теория Механизмов и Машин. 2005. №2. Том 3. 37 Синтез механизмов S = S () Исходные данные: 360 , p 6 , N 360 , d 15 , d lim 0.1 . Первый узел интерполирования является фиксированным и имеет координаты: 1 0 , S1 0 . Узлы интерполирования с номерами 2, 3, 4, 5 и 6 являются промежуточными. Рис. 4. График заданной функции S S () (для примера 2) В таблице 2 приведены результаты решения задачи синтеза для трёх вариантов выбора пяти промежуточных узлов интерполирования. Таблица 2 Результаты синтеза механизма ВССП (пример 2) Варианты решения 2 , 3 , 4 , 5 , 6 1 , 2 , …, 8 max , q Равномерное распределение 60, 120, 180, 240, 300 0.6397, 0.1571, 0.0202, 0.2833, 0.0412, 0.2804, 0.3398, 0.6702 0.6702, 0.3026 Поиск на основе условия: max min 41.76, 118.19, 200.39, 260.16, 319.82 0.3070, 0.1262, 0.1362, 0.3148, 0.3148, 0.3143, 0.3137, 0.3146 0.3148, 0.2013 Поиск на основе условия: q min 42.78, 119.09, 202.66, 259.94, 318.12 0.3191, 0.1318, 0.1251, 0.2759, 0.3663, 0.2882, 0.2859, 0.3313 0.3663, 0.1994 Каждому из трёх полученных решений соответствует определённое семейство кинематически эквивалентных механизмов ВССП. Все механизмы, принадлежащие какому-либо семейству, воспроизводят одну и ту же функцию положения s s () . На заданном отрезке [0, 360] эта функция совпадает с заданной функцией S S () в шести узлах интерполи- 38 http://tmm.spbstu.ru Оптимальное расположение узлов интерполирования … рования, а также в точке 360 . Для всех решений, приведённых в таблице 2, предельные отклонения j функции s s () от функции S S () достигаются восемь раз, т. е. m 8. Механизмы 2-го и 3-го семейств, найденных в результате поиска, обеспечивают достаточно высокое качество приближения функции положения к заданной функции. Так, для механизмов второго семейства отношение максимального отклонения max 0.3148 к полному размаху движения ведомого звена s max 100 равно 0.00315 . В результате поиска максимальное отклонение max уменьшено в 0.6702/0.3148 = 2.13 раза, а среднеквадратическое отклонение – в 0.3026/0.1994 = 1.52 раза. На рис. 5 приведён график функции отклонений () для механизмов второго семейства. Интересно отметить, что функция () имеет в промежутке [0, 360) восемь нулей, что на два больше чем число узлов интерполирования, равное шести. Среди механизмов, принадлежащих каждому из полученных семейств, был найден один механизм с наименьшим значением максимального угла давления max . Ниже приведены данные, характеризующие синтезированный механизм, принадлежащий второму семейству: постоянные параметры h1 131.806 , h2 4230.045 , h3 12644.573 , l12 11908.930 , 1 160.4538 , X 0 43.234 , 0 189.0219 ; признак сборки M 1 ; максимальный угол давления max 39.09 . = () Время вычислений для разных вариантов составляет около 20 секунд. Рис. 5. График функции отклонений () (для примера 2) Заключение 1. Таким известным аналитическим методам синтеза рычажных механизмов, как чебышевское приближение и квадратическое приближение, присущи две характерные особенности: с одной стороны, продуктивная идея, с другой стороны, невозможность практическо- Теория Механизмов и Машин. 2005. №2. Том 3. 39 Синтез механизмов го воплощения этой идеи в реальный механизм при использовании указанных методов в "чистом" виде (то есть без упрощающих допущений) из-за математических трудностей. 2. Продуктивная идея, свойственная чебышевскому приближению и квадратическому приближению (получение минимума максимального отклонения или среднеквадратического отклонения от заданной функции на заданном отрезке), может быть практически реализована, если при синтезе рычажного механизма использовать метод интерполирования в сочетании с оптимальным выбором узлов интерполирования. Соответствующая методика описана в данной статье на примере пространственного механизма ВССП. 3. Механизм ВССП обладает свойством кинематической эквивалентности. Любой механизм структуры ВССП принадлежит некоторому однопараметрическому семейству кинематически эквивалентных механизмов (к. э. м.). При синтезе механизма ВССП фактически синтезируется семейство к. э. м. Для того, чтобы получить конкретный механизм, нужно выбрать значение параметра синтезированного семейства к. э. м. 4. Расчёт базисных констант семейства к. э. м. (при заданном расположении узлов интерполирования) осуществляется на основе аналитического метода синтеза, описанного в статье. 5. Проверка наличия или отсутствия "дефекта ветвления" при синтезе семейства механизмов ВССП производится на основе простого способа, в котором используются значения признака сборки механизма в узлах интерполирования. 6. Максимальное или среднеквадратическое отклонение от заданной функции может быть минимизировано при соответствующем выборе узлов интерполирования на заданном отрезке приближения. Поиск оптимального расположения узлов интерполирования может быть осуществлён при помощи предлагаемой в статье процедуры. 7. При поиске оптимального расположения узлов интерполирования необходимо учитывать различия, свойственные двум типам задач – синтез цикловых механизмов и синтез нецикловых механизмов. Эти различия проявляются как в постановке задачи, так и в алгоритме поиска. 8. Как известно, число n узлов интерполирования, которое назначается заранее при составлении соответствующих уравнений, основанных на методе интерполирования, должно удовлетворять условию: n n par , где npar число всех взаимно независимых постоянных параметров проектируемого механизма. В статье установлено, что фактическое число na точек, в которых функция перемещения механизма совпадает с заданной функцией, может быть больше чем n и даже больше чем npar . Случаи, когда n a n или n a n par , обнаруживаются при поиске оптимального расположения n узлов интерполирования. В этих случаях достигается обычно дополнительное уменьшение максимального отклонения max в сравнении со случаем, когда n a n . 9. Выбор значения параметра синтезированного семейства к. э. м. производится таким образом, чтобы соответствующий механизм имел минимально возможное значение максимального угла давления по сравнению с другими механизмами того же семейства. СПИСОК ЛИТЕРАТУРЫ 1. Левитский Н.И. Проектирование плоских механизмов с низшими парами. – М.-Л.: Изд. АН СССР, 1950. 2. Левитский Н.И., Шахбазян К.Х. Синтез пространственных четырёхзвенных механизмов с низшими парами. – Труды семинара по теории машин и механизмов, 1953, т. XIV, вып. 54, с. 5-24. – М.: Изд. АН СССР. 3. Зиновьев В.А. Проектирование пространственных четырёхзвенных механизмов по полному числу параметров. – Труды семинара по теории машин и механизмов, 1954, т. XIV, вып. 55, с. 49-62. – М.: Изд. АН СССР. 40 http://tmm.spbstu.ru Оптимальное расположение узлов интерполирования … 4. Freudenstein, F. Approximate synthesis of four-bar linkages. Transactions of ASME, 1955, Vol. 77, pp. 853-861. 5. Шахбазян К.Х. Аналитический метод проектирования пространственного кривошипно-шатунного механизма с низшими парами. – Труды семинара по теории машин и механизмов, 1960, т. XX, вып. 78, с. 5-9. – М.: Изд. АН СССР. 6. Шахбазян К.Х. Синтез пространственного передаточного механизма с наивыгоднейшим углом давления. – Труды третьего совещания по основным проблемам ТММ. Анализ и синтез механизмов. – М.: Машгиз, 1963. 7. Белецкий В.Я. 1966. Вычисление полного числа параметров пространственного передаточного кривошипно-ползунного механизма с наивыгоднейшим углом давления. – В кн.: Анализ и синтез механизмов. – М.: Машиностроение, 1966, с. 31-38. 8. McLarnan, C.W. 1968. On linkage synthesis with minimum error. Journal of Mechanisms, Vol. 3, pp. 101-105. 9. Rao, A.V.M., Sandor, G.N., Kohli, D., Soni, A.H. 1973. Closed form synthesis of spatial function generating mechanism for the maximum number of precision points. Transactions of ASME, Journal of Engineering for Industry, Vol. 95, No. 3, pp. 725-736. 10. Luck, K., Modler, K.-H. 1978. Einfache Raumgetriebe für getriebetechnische Grundauf-gaben. Technische Universität Dresden, 1978, 10 S. 11. Suh, C.H., Radcliffe, C.W. 1978. Kinematics and mechanisms design. New York, John Wiley & Sons, Inc. 12. Полухин В.П., Васильев А.С. 1979. К динамическому синтезу пространственных кривошипно-ползунных механизмов. – В кн.: Механика машин. – М.: Наука, 1979, вып. 56, с. 29-32. 13. Haines, R.S. 1983. The spacing of precision points in full-cycle mechanism synthesis. Transactions of ASME, Journal of Mechanisms, Transmissions, and Automation in Design, Vol. 105, pp. 648-653. 14. Sandor, G.N., Xirong Zhuang. 1984. On the elimination of the branching problem in the synthesis of spatial motion generators with spheric joints. Part 1: Theory. Transactions of ASME, Journal of Mechanisms, Transmissions, and Automation in Design, Vol. 106, pp. 312-318. 15. Пейсах Э.Е., Кикин А.Б. Квадратический синтез пространственного механизма ВССП по полному числу параметров без дефекта ветвления с наивыгоднейшим углом давления. Теория механизмов и машин, Харьков, 1988, вып. 44, с. 23-31. 16. Cossalter, V., Da Lio, M., Doria, A. 1993. Optimum synthesis of spatial function generator mechanisms. Meccanica, 28, Kluwer Academic Publishers, pp. 263-268. 17. Peisach E. Kinematically equivalent spatial mechanisms with revolute pair at input and prismatic pair at output. In book: Advances in Robot Kinematics. Theory and Applications, Kluwer Academic Publishers, Edited by Jadran Lenarcic and Federico Thomas, 2002. 18. Пейсах Э.Е. Структура и кинематика пространственных рычажных механизмов. – С.-Петербург: Изд. университета технологии и дизайна, 2004, 212 с. Поступила в редакцию 24.04.2005 Теория Механизмов и Машин. 2005. №2. Том 3. 41