Лаб 2
advertisement

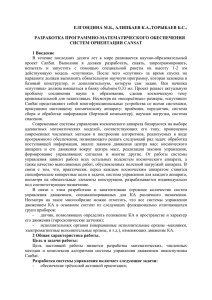
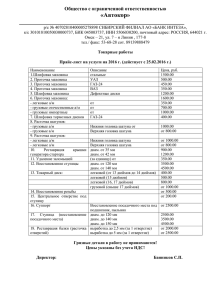
Санкт-Петербургский Государственный Морской Технический Университет Кафедра № 60 Лабораторная работа №3 «Определение момента трения в приборных подшипниках по методу выбега» Выполнил: студент группы 34РК1 Репонин Е.Н. Проверил: преподаватель Жадовский Д.А. 2008 г. 1. Цель работы Ознакомление с установкой и методикой работы по определению момента трения в приборных подшипниках по методу выбега. Практическое определение момента трения различных типов подшипников. 2. Схемы лабораторной установки а) Кинематическая схема: Испытуемый подшипник 1 наружным кольцом устанавливается в подставку 2 и закрепляется гайкой 3. Во внутреннее кольцо подшипника устанавливается маховик 4 с отверстиями, расположенными по внешнему контуру маховика. При помощи гири 5 маховику сообщается начальная скорость вращения. Маховик вращается до полного останова, обусловленного действиями момента трения в подшипнике. Дифференциальное уравнение движения маховика имеет вид: d J M ТР dT Где J - момент инерции маховика (н м с 2 ) , M ТР - момент трения в подшипнике ( Н м) , d 1 - угловое ускорение торможения маховика 2 . dT с После двойного интегрирования уравнения и преобразований: 4 J n T2 Где n - число оборотов маховика, T - время от начала движения до полной остановки маховика. M ТР Для определения n и T служит электроизмерительный блок, включающий светодиод 7, фотодиод 8 и электронную плату, установленную в корпусе 9. б) Структурная электрическая схема: 3. Методика определения момента трения подшипников по методу выбега Для определения M ТР требуется знать момент инерции маховика: 2 r42 M3 2 M1 2 M2 2 2 2 2 J R1 r1 R2 r2 R3 r3 n1 M 4 a J подш 2 2 2 2 M i i Vi где M i , Vi - массы и объемы соответствующих частей маховика; кг 1,18 10 3 3 м r2 Поскольку значение J подш и n1 M 4 a 2 4 на три порядка меньше, чем 2 значение других слагаемы в формуле и они имеют разные знаки, то этими слагаемыми можно пренебречь: J M M1 2 M R1 r12 2 R22 r22 3 R32 r32 2 2 2 R1 131 мм R2 101 мм R3 116 мм a 116 мм r1 6 мм r2 62 мм r3 62 мм r4 7,5 мм h1 6 мм h2 12 мм h3 6 мм h 2 R 2 r 0,9586 10 h 2 R 2 r 0,7247 10 V1 h1 2 R1 2 2 r4 2 r1 1,283 10 3 м 3 2 V2 V3 2 2 2 2 3 3 M1 V1 1,514 кг M 2 V2 1,131 кг M 3 V3 0,855 кг J 0,021 кг м 2 2 2 3 м3 2 3 м3 2 2 3 3. Таблица замеров и расчетных параметров. № подшипников I II III Точка закрепления шнура 1 2 3 4 1 2 3 4 1 2 3 4 n, оборотов 3,6 4,5 5,0 4,3 4,7 5,7 5,7 6,3 16,6 16,5 16,7 14,8 T, сек. 12,2 11,6 12,8 12,1 12,0 13,8 14,2 14,2 35,6 35,0 36,3 32,5 M ТР , Нм 0,006281 0,008685 0,007925 0,007627 0,008476 0,007773 0,007341 0,008114 0,003401 0,003498 0,003291 0,003639 M ТР средний, Нм 0,00763 0,00793 0,00346