НИЖЕГОРОДСКИЙ ИНСТИТУТ
МЕНЕДЖМЕНТА И БИЗНЕСА
О.А. Шешенина
Математика
(Линейная алгебра)
Электронное учебное пособие
Часть 2
Нижний Новгород
2013
СОДЕРЖАНИЕ
ТЕМАТИЧЕСКИЙ ПЛАН
4
РАЗДЕЛ 1. МАТРИЧНАЯ АЛГЕБРА.
5
ТЕМА 1. МАТРИЦЫ И ДЕЙСТВИЯ НАД НИМИ.
ТЕМА 2. ОПРЕДЕЛИТЕЛИ.
ТЕМА 3. ОБРАТНАЯ МАТРИЦА.
ТЕМА 4. РАНГ МАТРИЦЫ.
РАЗДЕЛ 2. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ.
5
12
22
32
43
ТЕМА 5. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ. НАХОЖДЕНИЕ ЕДИНСТВЕННОГО РЕШЕНИЯ СИСТЕМЫ N ЛИНЕЙНЫХ УРАВНЕНИЙ C N НЕИЗВЕСТНЫМИ. 43
ТЕМА 6. РЕШЕНИЕ СИСТЕМ ЛИНЕЙНЫХ УРАВНЕНИЙ В ОБЩЕМ СЛУЧАЕ.
53
РАЗДЕЛ 3. ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ ГЕОМЕТРИИ.
ТЕМА 7. МЕТОД КООРДИНАТ.
ТЕМА 8. ВЕКТОРЫ НА ПЛОСКОСТИ И В ПРОСТРАНСТВЕ.
ТЕМА 9. ПРЯМАЯ НА ПЛОСКОСТИ.
ТЕМА 10. ПЛОСКОСТЬ И ПРЯМАЯ В ПРОСТРАНСТВЕ.
ТЕМА 11. КРИВЫЕ ВТОРОГО ПОРЯДКА.
РАЗДЕЛ 4. МАТРИЧНЫЙ АНАЛИЗ.
ТЕМА 12. ВЕКТОРНЫЕ ПРОСТРАНСТВА.
ТЕМА 13. ЕВКЛИДОВЫ ПРОСТРАНСТВА.
ТЕМА 14. ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ.
ТЕМА 15. КВАДРАТИЧНЫЕ ФОРМЫ.
66
66
71
82
93
103
111
111
117
119
130
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
136
КОНТРОЛЬНЫЕ ВОПРОСЫ
139
ЛИТЕРАТУРА
141
ИНТЕРНЕТ-РЕСУРСЫ
142
2
ПРЕДИСЛОВИЕ
Если вы хотите участвовать в большой жизни, то наполняйте свою голову
математикой, пока есть к тому возможность. Она окажет вам потом огромную
помощь во всей вашей работе. М.И. Калинин
Цель данного пособия – в ясной и доступной форме дать студентам базовые знания по математике в части линейной
алгебры, необходимые для формирования общекультурных и профессиональных компетенций бакалавра-экономиста,
бакалавра-менеджера, бакалавра по управлению персоналом.
Пособие состоит из 4 разделов и 15 тем, включающих в себя понятия, теоремы, примеры с подробными решениями,
контрольные вопросы, задачи для самостоятельного решения, глоссарий, список литературы, ответы к задачам.
Данный материал необходим для усвоения таких дисциплин, как: «Математика в экономике», «Эконометрика»,
«Информационные системы в экономике» и других.
Учебное пособие «Математика (Линейная алгебра)» соответствует программам дисциплин «Математика» (направления
подготовки: 080200 Менеджмент, 080400 Управление персоналом) и «Линейная алгебра» (направление подготовки: 080100
Экономика), удовлетворяющих требованиям Федерального государственного образовательного стандарта высшего
профессионального образования третьего поколения.
3
ТЕМАТИЧЕСКИЙ ПЛАН
Разделы
Раздел 1. Матричная
алгебра.
Раздел 2. Системы
линейных уравнений.
Раздел 3. Элементы
аналитической
геометрии.
Раздел 4. Матричный
анализ.
Итого:
Трудое
мкость
Очное обучение
Заочное обучение
Всего
Практич Самостоятел Всего
Практич Самостоятел
Лекц
Лек
аудиторны
еские
ьная работа аудиторн
еские
ьная работа
ии
ции
х часов
занятия
студентов ых часов
занятия
студентов
64
32
12
20
32
6
2
4
58
40
20
8
12
20
4
2
2
36
40
20
8
12
20
4
2
2
36
36
18
8
10
18
4
2
2
32
180
90
36
54
90
18
8
10
162
4
Раздел 1. Матричная алгебра.
Тема 1. Матрицы и действия над ними.
Определение. Матрицей называется прямоугольная таблица чисел, имеющая m строк и n столбцов одинаковой
длины. Числа, составляющие матрицу, называются элементами. Матрицы обозначаются заглавными латинскими буквами А,
В, С, Х, У,…, а их элементы соответствующими строчными буквами с двумя нижними индексами a ij , bik , c kj , x1 j , y i1 . Первый
из индексов указывает номер строки, а второй – номер столбца, на пересечении которых находится элемент. Число строк m
и число столбцов n определяют размер матрицы - m × n .
Произвольная матрица записывается в виде
a12 a1n
a
11
a21 a22 a2 n
.
Am×n =
a
a
a
m2
mn
m1
4 − 4.5
Пример 1.1. Матрица A = 1.2 − 2 имеет 3 строки и 2 столбца. Поэтому её размер 3 × 2 или A3×2 . Матрица A
7
1
состоит из элементов:
a11 = 4, a12 = −4.5, a21 = 1.2, a22 = −2, a31 = 7, a32 = 1 .
Определение. Матрица, состоящая из одной строки, называется матрицей-строкой или вектором-строкой, а из
одного столбца - матрицей-столбцом или вектором-столбцом.
Пример 1.2. (5 − 2 3) -матрица строка.
− 6
Пример 1.3. - матрица-столбец.
4
Определение. Матрица называется прямоугольной, если число ее строк не равно числу столбцов.
Определение. Матрица называется квадратной n -го порядка, если число ее строк равно числу столбцов и равно n .
5
2 − 3
-квадратная матрица второго порядка.
Пример 1.4.
4 1
Определение. Совокупность элементов квадратной матрицы n -го порядка a11 , a 22 ,..., a nn образует главную диагональ,
а a1n , a 2 n −1 ,..., a n1 -побочную диагональ.
Определение. Квадратная матрица называется треугольной, если ее элементы, лежащие над или под главной
диагональю равны нулю.
− 5 0 0
1 − 2
; 4 3 0 -треугольные матрицы.
Пример 1.5.
0 3
1 8 2
Определение. Квадратная матрица называется диагональной, если ее элементы, лежащие вне главной диагонали,
равны нулю.
−1 0 0
− 2 0
; 0 3 0 -диагональные матрицы.
Пример 1.6.
0 3
0 0 4
Определение. Квадратная матрица называется скалярной, если она является диагональной, причем ее элементы
главной диагонали равны.
0
−1 0
4 0
; 0 − 1 0 -скалярные матрицы.
Пример 1.7.
0 4
0 − 1
0
Определение. Квадратная матрица называется единичной, если у неё все элементы главной диагонали равны единице,
а остальные нулю. Единичная матрица обозначается с помощью буквы Е.
1 0
-единичная матрица второго порядка;
Пример 1.8. E =
0
1
6
1 0 0
E = 0 1 0 -единичная матрица третьего порядка.
0 0 1
Определение. Матрица, все элементы которой равны нулю, называется нулевой. Нулевая матрица обозначается с
помощью буквы О.
0 0 0
-нулевая матрица.
Пример 1.9. O =
0 0 0
Определение. Две матрицы и называются равными, если они имеют одинаковые размеры и совпадают поэлементно.
Определение. Произведением матрицы Am× n = (aij ) на число λ называется матрица Cm× n = (cij ) , элементы которой
равны cij = λaij (i=1..m, j=1..n).
2 4 − 1
на 3.
Пример 1.10. Умножить матрицу A =
−
1
5
2
2 4 − 1 3 ⋅ 2 3 ⋅ 4 3 ⋅ (−1) 6 12 − 3
=
=
3 ⋅ A = 3 ⋅
− 1 5 2 3 ⋅ (−1) 3 ⋅ 5 3 ⋅ 2 − 3 15 6
Определение. Суммой матриц Am× n = (aij ) и Bm× n = (bij ) называется матрица Cm× n = (cij ) , элементы которой равны
сij = aij + bij ( i = 1..m, j = 1..n ).
3 − 2
− 5 4
Пример 1.11. Найти сумму матриц A = 1 0 , B = 3
1 .
2 5
− 3 − 2
3 − 2 − 5 4 3 − 5 − 2 + 4 − 2 2
A + B = 1 0 + 3
1 = 1 + 3 0 + 1 = 4 1 .
2 5 − 3 − 2 2 − 3 5 − 2 −1 3
Разность двух матриц одинакового размера определяется через операцию сложения и операцию умножения на число:
A − B = A + (−1) ⋅ B .
7
Операция умножения двух матриц определена, когда число столбцов первой матрицы равно числу строк второй
матрицы.
Определение. Пусть даны матрица A = (a ij ) размером m × k и матрица B = (bij ) размером k × n . Произведением
матриц A и B называют матрицу C = (c ij ) (С=АВ) размером m × n с элементами:
cij = ai1 ⋅ b1 j + ai 2 ⋅ b2 j + ... + aik ⋅ bkj
i = 1..m, j = 1..n
В формировании элемента с ij произведения AB участвуют элементы i -ой строки матрицы A и j -го столбца матрицы
B . Поэтому правило умножения матриц называют также правилом умножения «строка на столбец».
Если произведение матриц AB существует, то произведение матриц BA может не существовать, т.е. порядок матрицсомножителей существенен.
Пример 1.12. Найти произведения матриц AB и BA , если
2
1 3
,
B = .
A =
− 5
5 − 2
Поскольку число столбцов матрицы A совпадает с числом строк матрицы B , то произведение AB существует.
Определим его размер A2×2 ⋅ B 2×1 = C 2×1
Вычислим элементы матрицы-произведения
1 3 2 1 ⋅ 2 + 3 ⋅ (−5) − 13
⋅ =
=
AB =
5
−
2
−
5
5
⋅
2
+
(
−
2
)
⋅
(
−
5
)
20
Число столбцов матрицы B не совпадает с числом строк матрицы A , поэтому произведение BA не существует.
Определение. Если определены оба произведения AB и BA и выполнено равенство AB = BA , то матрицы A и B
называют перестановочными.
1 2
1 3
и B =
Пример 1.13. Проверить, являются ли матрицы A =
перестановочными.
4
−
1
6
−
2
1 ⋅ 3 + 2 ⋅ (−2) 13 − 1
1 2 1 3 1⋅1 + 2 ⋅ 6
⋅
=
=
A2×2 ⋅ B2×2 =
4 − 1 6 − 2 4 ⋅ 1 + (−1) ⋅ 6 4 ⋅ 3 + (−1) ⋅ (−2) − 2 14
8
1 ⋅ 2 + 3 ⋅ (−1) 13 − 1
1 3 1 2 1⋅1 + 3 ⋅ 4
⋅
=
=
B2×2 ⋅ A2×2 =
6 − 2 4 − 1 6 ⋅ 1 + (−2) ⋅ 4 6 ⋅ 2 + (−2) ⋅ (−1) − 2 14
Следовательно, матрицы A и B перестановочные.
Свойства операций сложения и умножения матриц:
1. A + B = B + A
2. ( A + B ) + C = A + (B + C )
3. α ( A + B ) = αA + αB
4. A( BC ) = ( AB)C
5. A( B + C ) = AB + AC
6. ( A + B)C = AC + BC
7. α ( AB) = (αA) B
Пример 1.14. Проверить, что равенство A( BC ) = ( AB)C выполняется для матриц
3 0
3 −1 2
,
A = (1 2 ),
B =
C = 4 1 .
5 0 − 4
5 − 2
Вычислим произведение A(BC ) .
3 0
3 − 1 2
⋅ 4 1 =
B 2×3 ⋅ C 3×2 =
5 0 − 4
5 − 2
3 ⋅ 3 + (−1) ⋅ 4 + 2 ⋅ 5 3 ⋅ 0 + (−1) ⋅ 1 + 2 ⋅ (−2) 15 − 5
=
=
5 ⋅ 3 + 0 ⋅ 4 + (−4) ⋅ 5 5 ⋅ 0 + 0 ⋅ 1 + (−4) ⋅ (−2) − 5 8
15 − 5
= (1 ⋅ 15 + 2 ⋅ (−5) 1 ⋅ (−5) + 2 ⋅ 8) = (5 11)
A1×2 ⋅ ( B2×3 ⋅ C3×2 ) = (1 2 ) ⋅
−
5
8
Вычислим произведение ( AB)C
9
3 −1 2
=
A1×2 ⋅ B2×3 = (1 2 ) ⋅
5 0 − 4
= (1 ⋅ 3 + 2 ⋅ 5 1 ⋅ (−1) + 2 ⋅ 0 1 ⋅ 2 + 2 ⋅ (−4) ) = (13 − 1 − 6 )
3 0
( A1×2 ⋅ B2×3 ) ⋅ C3×2 = (13 − 1 − 6) ⋅ 4 1 =
5 − 2
= (13 ⋅ 3 + (−1) ⋅ 4 + (−6) ⋅ 5 13 ⋅ 0 + (−1) ⋅ 1 + (−6) ⋅ (−2) ) = (5 11)
Поскольку, A( BC ) = (5 11) и ( AB)C = (5 11) , то равенство A( BC ) = ( AB)C выполняется.
Определение. Целой положительной степенью A m (m > 1) квадратной матрицы A называется произведение m
матриц, равных A , т.е.
Am =
A ⋅
A
⋅ ...
A
⋅
m раз
По определению полагают, что A0 = E , A1 = A .
− 2 4
Пример 1.15. Найти A 2 , где A =
3 1
− 2 4 − 2 4 16 − 4
⋅
=
A 2 = A ⋅ A =
3 1 3 1 − 3 13
Определение. Выражение вида P( A) = α 0 E + α1 A + α 2 A 2 + ... + α m A m , где A и E - соответственно квадратная и
единичная матрицы одинакового порядка; α 0 ,α1 ,α 2 ,...,α m - числа, называется полиномом (многочленом) от матрицы.
Данное выражение рассматривают также как результат подстановки матрицы A вместо переменной x в обычный многочлен
степени m :
P( x) = α 0 + α1 x + α 2 x 2 + ... + α m x m
− 2 − 1
.
Пример 1.16. Вычислить значение многочлена f ( x) = 2 x 2 − 4 x + 5 от матрицы A =
1
3
10
Вместо x подставляем в функцию f (x) матрицу A , вместо числа 5 используем матрицу 5 ⋅ E , где E -единичная
матрица второго порядка, как и матрица A .
1
− 2 − 1 − 2 − 1 1
⋅
=
A 2 = A ⋅ A =
1 3
1 − 3 − 2
3
1 2
2
1
=
2 ⋅ A 2 = 2
− 3 − 2 − 6 − 4
− 2 − 1 − 8 − 4
=
4 ⋅ A = 4
4
12
1
3
1 0 5 0
=
5 ⋅ E = 5
0
1
0
5
2 − 8 − 4 5 0 15
6
2
−
+
=
.
f ( A) = 2 A 2 − 4 A + 5 E =
− 6 − 4 12 4 0 5 − 18 − 3
Определение. Матрица AT , получающаяся из матрицы А с помощью замены строк соответствующими столбцами,
называется транспонированной.
3 7
3 2 − 1
. Тогда AT = 2 1 .
Пример 1.17. Пусть матрица A =
7 1 0
− 1 0
Свойства транспонирования матрицы:
( )
T
=A
T
2. (αA) = αAT
T
3. ( A + B ) = AT + B T
T
4. ( AB ) = B T AT
1. AT
НАЧАЛО ТЕМЫ
СОДЕРЖАНИЕ
11
Тема 2. Определители.
Любой квадратной матрице можно поставить по определенным правилам в соответствие число, которое называется
определителем (детерминантом) матрицы. Пусть дана квадратная матрица
a12 ... a1n
a
11
a21 a22 ... a2 n
,
A=
... ... ... ...
...
a
a
a
n2
nn
n1
тогда ее определитель можно обозначить следующим образом:
a11 a12 ... a1n
... a2 n
,
A , det A .
... ...
an1 an 2 ... ann
Иногда для обозначения определителя произвольной матрицы используется символ ∆ .
Определителем матрицы первого порядка (a11 ) назовем число
a11 = a11 .
Пример 2.1. Пусть A = (5) . Тогда A = 5 = 5 .
Пример 2.2. Пусть B = (− 7 ) . Тогда B = − 7 = −7 .
a21
...
a22
...
a11 a12
назовем число
Определителем матрицы второго порядка
a
a
21
22
a11 a12
= a11 ⋅ a22 − a12 ⋅ a21 .
a21 a22
Схема вычисления определителя второго порядка:
12
a11 a12
a
a
a
a
= + 11 12 − 11 12
a21 a22
a21 a22 a21 a22
.
5 7
5 7
. Тогда A =
Пример 2.3. Пусть A =
= 5 ⋅ 2 − 7 ⋅ 1 = 10 − 7 = 3 .
2
1
2
1
2 −3
Пример 2.4.
= 2 ⋅ 4 − (−3) ⋅ 1 = 8 + 3 = 11.
1 4
a11 a12 a13
Определителем матрицы третьего порядка a21 a22 a23 назовем число
a
31 a32 a33
a11 a12 a13
a21
a31
a22
a32
a23 = {a11 ⋅ a22 ⋅ a33 + a31 ⋅ a12 ⋅ a23 + a21 ⋅ a32 ⋅ a13 } −
a33
(2.1)
−{a31 ⋅ a22 ⋅ a13 + a21 ⋅ a12 ⋅ a33 + a11 ⋅ a32 ⋅ a23 }
Правило треугольников вычисления определителей третьего порядка: первое из трех слагаемых, входящих в сумму
(2.1) со знаком «+», есть произведение элементов главной диагонали, второе и третье- произведения элементов, находящихся
в вершинах двух треугольников с основаниями, параллельными главной диагонали. Три следующих слагаемых, входящих в
данную сумму со знаком «-», определяются аналогично, но относительно побочной диагонали.
Схема правила треугольников вычисления определителя третьего порядка:
a11 a12 a13
a11 a12 a13 a11 a12 a13
a21
a22
a23 = + a21
a22
a23 − a21
a22
a23
a31
a32
a33
a32
a33
a32
a33
a31
a31
13
3 −4 6
Пример 2.5. Вычислить определитель 2 − 3 1 .
−3 5 1
3 −4 6
2 − 3 1 = {3 ⋅ (−3) ⋅ 1 + (−3) ⋅ (−4) ⋅ 1 + 2 ⋅ 5 ⋅ 6} −
−3
5
1
−{(−3) ⋅ (−3) ⋅ 6 + 2 ⋅ (−4) ⋅ 1 + 3 ⋅ 5 ⋅ 1} =
= {− 9 + 12 + 60} − {54 − 8 + 15} = 63 − 61 = 2 .
Правило Саррюса вычисления определителей третьего порядка: справа от определителя приписываются его первые
два столбца; первые три слагаемых входящих в сумму (2.1) со знаком «+», есть произведение элементов главной диагонали и
элементов на прямых, параллельных ей. Три следующих слагаемых, входящих в данную сумму со знаком «-», определяются
аналогично, но относительно побочной диагонали.
Схема правила Саррюса вычисления определителя третьего порядка:
3 −7 −2
Пример 2.6. Вычислить определитель 1
0
2 .
−2 3
1
14
3 −7 −2 3
−7
1
0
2
1
0
=
1 −2
3
−2 3
−
−
−
+
+
+
= {3 ⋅ 0 ⋅ 1 + (−7) ⋅ 2 ⋅ (−2) + (−2) ⋅ 1 ⋅ 3} − {(−2) ⋅ 0 ⋅ (−2) + 3 ⋅ 2 ⋅ 3 + (−7) ⋅ 1 ⋅ 1} =
= {0 + 28 − 6} − {0 + 18 − 7} = 22 − 11 = 11.
3 −7 −2
1
0
2 =
1
−2 3
Определение. Минором Мij элемента аij определителя матрицы A n-го порядка называется определитель матрицы (n1)-го порядка, которая получается из матрицы A вычёркиванием i-ой строки и j-го столбца.
Определение. Алгебраическим дополнением Aij элемента аij определителя матрицы называется его минор, взятый со
знаком (−1) i+ j :
Aij = (−1) i + j M ij .
Пример 2.7. Найти все миноры и алгебраические дополнения определителя
M 11 = − 11 = −11
A11 = (−1)1+1 ⋅ M 11 = M 11 = −11
M 12 = 4 = 4
A12 = (−1)1+ 2 ⋅ M 12 = − M 12 = −4
M 21 = − 7 = −7
A21 = (−1) 2+1 ⋅ M 21 = − M 21 = 7
M 22 = 3 = 3
A22 = (−1) 2+ 2 ⋅ M 22 = M 22 = 3
3
−7
4 − 11
.
3 −4 6
Пример 2.8. Найти все миноры и алгебраические дополнения определителя 2 − 3 1 .
−3 5 1
M 11 =
−3 1
5
1
= −3 − 5 = −8
A11 = (−1)1+1 ⋅ M 11 = M 11 = −8
15
M 12 =
M 13 =
M 21 =
M 22 =
M 23 =
M 31 =
M 32 =
M 33 =
2
1
=2+3=5
−3 1
2
−3
−3
5
−4 6
5
1
3
6
−3 1
A21 = (−1) 2+1 ⋅ M 21 = − M 21 = 34
= 3 + 18 = 21
A22 = (−1) 2+ 2 ⋅ M 22 = M 22 = 21
−4
−3
5
−3 1
3 6
= 15 − 12 = 3
= −4 + 18 = 14
= 3 − 12 = −9
2 1
3 −4
A13 = (−1)1+3 ⋅ M 13 = M 13 = 1
= −4 − 30 = −34
3
−4 6
= 10 − 9 = 1
A12 = (−1)1+ 2 ⋅ M 12 = − M 12 = −5
= −9 + 8 = −1
A23 = (−1) 2+3 ⋅ M 23 = − M 23 = −3
A31 = (−1) 3+1 ⋅ M 31 = M 31 = 14
A32 = (−1) 3+ 2 ⋅ M 32 = − M 32 = 9
A33 = (−1) 3+3 ⋅ M 33 = M 33 = −1
2 −3
Теорема (Лапласа). Определитель квадратной матрицы равен сумме произведений элементов любой строки или
столбца на их алгебраические дополнения:
∆ = ai1 Ai1 + ai 2 Ai 2 + ... + ain Ain
(разложение по элементам i-ой строки; i=1..n)
∆ = a1 j A1 j + a2 j A2 j + ... + anj Anj
(разложение по элементам j-го столбца; j=1..n).
16
− 3 2 −1
Пример 2.9. Найти определитель − 4 5 − 2 , используя теорему Лапласа.
7 4 1
Раскладывая данный определитель по элементам первой строки, получаем:
− 3 2 −1
− 4 5 − 2 = −3 ⋅ A11 + 2 ⋅ A12 − 1 ⋅ A13 =
7
4
1
= −3 ⋅ (−1)1+1 ⋅ M 11 + 2 ⋅ (−1)1+ 2 ⋅ M 12 − 1 ⋅ (−1)1+3 ⋅ M 13 = −3 ⋅ M 11 − 2 ⋅ M 12 − M 13 =
5 −2
−4 −2 −4 5
= −3 ⋅
− 2⋅
−
= −3 ⋅ 13 − 2 ⋅ 10 − (−51) = −8 .
4 1
7
1
7 4
3
0 7 1
Пример 2.10. Вычислить определитель
−1 − 5 2 − 4
.
1
2 3 5
4
0 9 1
Вычислим данный определитель разложением по элементам второго столбца:
∆ = 0 ⋅ A12 + (−5) ⋅ A22 + 2 ⋅ A32 + 0 ⋅ A42 = −5 A22 + 2 A32 = −5M 22 − 2 M 32
Выбор второго столбца для разложения определителя не случаен. Поскольку он содержит два нуля, то вместо четырех,
нужно вычислить только два минора.
3 7 1
3 7 1
M 22 = 1 3 5 = 4
M 32 = − 1 2 − 4 = −8
4 9 1
4 9 1
∆ = −5M 22 − 2 M 32 = −5 ⋅ 4 − 2 ⋅ (−8) = −4
17
Вычислить миноры M 22 и M 32 можно по правилу треугольников, по правилу Саррюса или по теореме Лапласа.
Студентам рекомендуется их вычислить самостоятельно.
Следствие (из теоремы Лапласа). Определитель квадратной матрицы равен сумме произведений элементов любой
строки или столбца, взятых с учетом знака (со знаком «+», если сумма нижних индексов элемента четная, и со знаком «-» в
противном случае), на их миноры.
Знак элемента, который нужно учитывать при разложении, принято указывать справа над элементом.
− 3 2 −1
Пример 2.11. Найти определитель − 4 5 − 2 , используя следствие из теоремы Лапласа.
− 3+
7 4 1
Вычислим данный определитель также разложением по элементам первой строки:
2 − − 1+
−4
5
7
4
= −3 ⋅
− 2 = −3 ⋅ M 11 − 2 ⋅ M 12 − M 13 =
1
5 −2
− 2⋅
−4 −2
−
−4 5
= −3 ⋅ 13 − 2 ⋅ 10 − (−51) = −8 .
4 1
7
1
7 4
Вычислим данный определитель разложением по элементам второго столбца:
− 3 2− − 1
− 4 5+
7
= −2 ⋅
4−
− 2 = −2 ⋅ M 12 + 5 ⋅ M 22 − 4 ⋅ M 32 =
1
−4 −2
+ 5⋅
− 3 −1
− 4⋅
−3
−1
= −2 ⋅ 10 + 5 ⋅ 4 − 4 ⋅ 2 = −8.
7
1
7
1
−4 −2
Из данного примера видно, что результат, полученный разложением по первой строке и по второму столбцу, один и тот
же. В этом и заключается суть теоремы Лапласа.
18
Пример 2.12. Вычислить определитель
3
1
−2
1
−1
2
0
1
5
−7
1
−2
.
−3 4 −3 1
Вычислим данный определитель разложением по элементам третьего столбца:
3
1 − 2+ 1
−1 2
1
3 1 1
3
1
1
−
−1 2
0
1
= −2 ⋅ 5 − 7 − 2 + 1 ⋅ − 1 2 1 + 3 ⋅ − 1 2
1 =
+
−2
5 −7 1
−3 4
1
−3 4 1
5 −7 −2
− 3 4 − 3− 1
= −2 ⋅ 0 + 1 ⋅ (−6) + 3 ⋅ 9 = 21 .
Вычислить три минора третьего порядка можно по правилу треугольников, по правилу Саррюса или по теореме
Лапласа. Студентам рекомендуется их вычислить самостоятельно.
Свойства определителей:
1. Если какая-либо строка (столбец) матрицы состоит из одних нулей, то ее определитель равен нулю.
2. Если все элементы какой-либо строки (столбца) определителя умножить на произвольное число, то весь определитель
умножится на это число.
3. При транспонировании квадратной матрицы ее определитель не изменяется.
4. Если две строки (два столбца) определителя поменять местами, то определитель сменит знак на противоположный.
5. Если определитель содержит две одинаковые строки (два столбца), то определитель равен нулю.
6. Если элементы двух строк (двух столбцов) определителя пропорциональны, то определитель равен нулю.
7. Если в определителе каждый элемент какой-либо строки (столбца) есть сумма двух слагаемых, то определитель равен
сумме двух определителей, в которых эта строка (столбец) заменена слагаемыми.
8. Если ко всем элементам любой строки (столбца) определителя прибавить соответствующие элементы другой строки
(столбца), умноженные на произвольное число, то определитель не изменится.
19
1
4
1
Пример 2.13. Вычислить определитель − 5 − 20
3 , используя его свойства.
−2
4
5
Воспользуемся свойством №8: прибавим к элементам второй строки соответствующие элементы первой строки,
умноженные на пять:
1
4
1
1 4 1
− 5 − 20
3 + 5I = 0 0
8 .
4
5
−2
4 5 −2
Раскладывая полученный определитель по элементам второй строки, получаем:
1 4 1
1 4
0 0 8 − = −8 ⋅
= −8 ⋅ (−11) = 88 .
4 5
4 5 −2
5
Пример 2.14. Вычислить определитель
2
0
4
− 7 7 14 − 14
5
7
8
2
, используя его свойства.
1
4 3 2
Воспользуемся свойством №2: вынесем общий множитель элементов второй строки 7 за знак определителя:
5 2 0 4
5 2 0
4
∆=
− 7 7 14 − 14
5
7
8
2
=7⋅
−1 1 2 − 2
5
7 8
2
4 3 2 1
4 3 2
1
Снова воспользуемся свойством №2: вынесем общий множитель элементов третьего столбца 2 за знак определителя:
20
5
∆ =7⋅
2 0
4
−1 1 2 − 2
5
7 8
5
=7⋅2⋅
2
2 0
4
−1 1 1 − 2
5
7 4
2
4 3 2 1
4 3 1 1
Воспользуемся свойством №8: вычтем из элементов четвертой строки соответствующие элементы второй строки и из
элементов третьей строки соответствующие элементы второй строки, умноженные на четыре:
5 2 0 4
5 2 0 4
∆ = 14 ⋅
−1 1 1 − 2
5
7 4
2 − 4 II
= 14 ⋅
−1 1 1 − 2
9
3 0
10
5 2 0 3
4 3 1 1 − II
Раскладывая полученный определитель по элементам третьего столбца, получаем:
5 2 0
4
5 2 4
− 1 1 1− − 2
∆ = 14 ⋅
= 14 ⋅ (−1) ⋅ 9 3 10
9 3 0 10
5 2 3
5 2 0
3
Воспользуемся свойством №8: вычтем из элементов первой строки соответствующие элементы третьей строки и затем
выполним разложение по элементам первой строки:
5 2 4 − III
0 0 1+
9 3
∆ = 14 ⋅ (−1) ⋅ 9 3 10
= −14 ⋅ 9 3 10 = −14 ⋅
= −14 ⋅ 3 = −42 .
5 2
5 2 3
5 2 3
НАЧАЛО ТЕМЫ
СОДЕРЖАНИЕ
21
Тема 3. Обратная матрица.
Определение. Матрица A −1 называется обратной по отношению к квадратной матрице A , если при умножении
этой матрицы на данную как справа, так и слева получается единичная матрица:
A ⋅ A −1 = A −1 ⋅ A = E .
Заметим, что обратная матрица определена для квадратной матрицы; в этом случае обратная матрица также является
квадратной, причем того же порядка. Для матриц, не являющихся квадратными, обратные матрицы не существуют.
Определение. Матрица называется невырожденной, если ее определитель отличен от нуля и вырожденной – в
противном случае.
5 3
является невырожденной, поскольку
Пример 3.1. Матрица
2 1
5 3
= 5 ⋅ 1 − 3 ⋅ 2 = −1 ≠ 0 .
2 1
6 3
является вырожденной, поскольку
Пример 3.2. Матрица
4 2
6 3
= 6 ⋅ 2 − 4 ⋅ 3 = 0.
4 2
Теорема (необходимое и достаточное условие существования обратной матрицы). Обратная матрица A −1
существует и единственна тогда и только тогда, когда матрица A невырожденная.
5 3
6 3
из примера 3.1. имеет обратную матрицу, а
из примера 3.2. не имеет обратной
Заметим, что матрица
2 1
4 2
матрицы.
Свойства обратных матриц:
1.
(A )
−1 −1
=A
22
1
A
2.
A −1 =
3.
( A ⋅ B )−1 = B −1 ⋅ A−1
4.
5.
(A ) = (A )
(A ) = (A )
−1 T
T −1
−1 m
m −1
~
Определение. Присоединённой к квадратной матрице A называется квадратная матрица A того же порядка,
элементами которой являются алгебраические дополнения соответствующих элементов определителя матрицы,
транспонированной к матрице A .
Из определения следует, что присоединённая матрица рассматривается только для квадратных матриц и сама является
квадратной, поскольку понятие алгебраического дополнения вводится для квадратных матриц.
Для получения присоединенной матрицы к матрице A можно сначала найти матрицу AТ , затем алгебраические
дополнения всех элементов определителя матрицы AТ и составить из них матрицу. Можно также сначала найти
алгебраические дополнения всех элементов определителя матрицы A , составить из них матрицу, а затем полученную
матрицу транспонировать.
Алгоритм вычисления обратной матрицы A −1 с помощью присоединенной матрицы:
1. Находим определитель исходной матрицы A . Если A = 0 , то матрица A вырожденная и обратная матрица A −1 не
существует. Если A ≠ 0 , то матрица A невырожденная, и обратная матрица A −1 существует.
2. Находим алгебраические дополнения всех элементов определителя матрицы A и составляем из них матрицу (Aij ) .
~
3. Транспонируем полученную матрицу, т.е находим присоединенную матрицу A .
4. Вычисляем обратную матрицу по формуле:
A−1 =
1 ~
⋅A
A
23
5. Проверяем правильность вычисления обратной матрицы A −1 , исходя из ее определения: A ⋅ A −1 = E или A −1 ⋅ A = E .
3 5
с помощью присоединенной матрицы.
Пример 3.3. Найти матрицу, обратную к A =
8 13
Находим определитель исходной матрицы:
A=
3
5
= 39 − 40 = −1.
8 13
Следовательно, матрица A невырожденная и обратная матрица A −1 существует.
Находим алгебраические дополнения всех элементов определителя матрицы A :
A12 = (−1)1+ 2 ⋅ M 12 = − M 12 = −8
M 11 = 13 = 13
A11 = (−1)1+1 ⋅ M 11 = M 11 = 13 M 12 = 8 = 8
M 21 = 5 = 5
A21 = (−1) 2+1 ⋅ M 21 = − M 21 = −5
A22 = (−1) 2 + 2 ⋅ M 22 = M 22 = 3
M 22 = 3 = 3
Составляем из них матрицу:
(Aij ) = −135
Находим присоединенную матрицу:
− 8
.
3
Т
13 − 5
~ 13 − 8
=
.
A =
− 5 3
− 8 3
Находим обратную матрицу:
13 − 5 − 13 5
1 ~
1 ~
~
=
.
⋅A=
⋅ A = − A = −
A
(−1)
− 3
− 8 3 8
Проверяем правильность вычисления обратной матрицы A −1 :
− 13 5 3 5 − 39 + 40 − 65 + 65 1 0
=
=
.
A −1 ⋅ A =
8
− 3 8 13 24 − 24
40 − 39 0 1
A −1 =
24
− 13 5
.
Значит, A =
8
− 3
−1
2 2
1
Пример 3.4. Найти матрицу, обратную к A = 2
3 6 с помощью присоединенной матрицы.
−1 − 2 1
Находим определитель исходной матрицы:
1+ 2 − 2 +
A= 2
3
−1 − 2
6 = 1⋅
1
3
6
−2 1
− 2⋅
2
6
−1 1
+ 2⋅
2
3
−1 − 2
= 15 − 16 − 2 = −3 .
Следовательно, матрица A невырожденная и обратная матрица A −1 существует.
Находим алгебраические дополнения всех элементов определителя матрицы A :
3 6
M 11 =
= 3 + 12 = 15
A11 = (−1)1+1 ⋅ M 11 = M 11 = 15
−2 1
M 12 =
M 13 =
M 21 =
M 22 =
2
6
−1 1
2
=2+6=8
3
−1 − 2
2
2
−2 1
1
2
−1 1
= −4 + 3 = −1
A12 = (−1)1+ 2 ⋅ M 12 = − M 12 = −8
A13 = (−1)1+3 ⋅ M 13 = M 13 = −1
=2+4=6
A21 = (−1) 2+1 ⋅ M 21 = − M 21 = −6
=1+ 2 = 3
A22 = (−1) 2+ 2 ⋅ M 22 = M 22 = 3
25
M 23 =
M 31 =
M 32 =
M 33 =
1
2
−1 − 2
2 2
= −2 + 2 = 0
= 12 − 6 = 6
A31 = (−1) 3+1 ⋅ M 31 = M 31 = 6
=6−4=2
A32 = (−1) 3+ 2 ⋅ M 32 = − M 32 = −2
= 3 − 4 = −1
A33 = (−1) 3+3 ⋅ M 33 = M 33 = −1
3 6
1 2
2 6
1 2
A23 = (−1) 2+3 ⋅ M 23 = − M 23 = 0
2 3
Составляем из них матрицу:
Находим присоединенную матрицу:
Находим обратную матрицу:
15 − 8 − 1
(Аij ) = − 6 3 0 .
6 − 2 − 1
Т
15 − 6 6
15 − 8 − 1
~
A = − 6 3
0 = − 8 3 − 2 .
6 − 2 − 1
−1 0 −1
15 − 6 6 − 5 2 − 2
1 ~
1
−1
A = ⋅A=
⋅ − 8 3 − 2 = 8 / 3 − 1 2 / 3 .
A
(−3)
− 1 0 − 1 1/ 3 0 1/ 3
−1
Проверяем правильность вычисления обратной матрицы A :
26
2 2
15 − 6 6 1
1
−1
A A=
⋅ −8 3 −2 2
3 6 =
(−3)
− 1 0 − 1 − 1 − 2 1
0 1 0 0
− 3 0
1
= − ⋅ 0 − 3 0 = 0 1 0
3
0
0 − 3 0 0 1
−5 2 −2
−1
Значит, A = 8 / 3 − 1 2 / 3 .
1/ 3 0 1/ 3
3 − 4 6
Пример 3.5. Найти матрицу, обратную к A = 2 − 3 1 с помощью присоединенной матрицы.
− 3 5 1
− 8 − 5 1
В примере 2.8 были найдены все алгебраические дополнения определителя данной матрицы: (Аij ) = 34 21 − 3 .
14 9 − 1
Тогда по теореме Лапласа:
A = a11 ⋅ A11 + a12 ⋅ A12 + a13 ⋅ A13 = 3 ⋅ (−8) + (−4) ⋅ (−5) + 6 ⋅ 1 = 2 .
Определитель матрицы A отличен от нуля, следовательно, обратная матрица существует. Находим присоединенную
матрицу:
27
T
Находим обратную матрицу:
− 8 34 14
− 8 − 5 1
~
A = 34 21 − 3 = − 5 21 9
14 9 − 1
1 − 3 − 1
17
7
− 8 34 14 − 4
1 ~ 1
A −1 = ⋅ A = ⋅ − 5 21 9 = − 5 / 2 21 / 2 9 / 2
A
2
1 − 3 − 1 1 / 2 − 3 / 2 − 1 / 2
−1
Проверяем правильность вычисления обратной матрицы A , исходя из определения:
17
7 3 − 4 6 1 0 0
−4
−1
A A = − 5 / 2 21 / 2 9 / 2 2 − 3 1 = 0 1 0 .
1 / 2 − 3 / 2 − 1 / 2 − 3 5 1 0 0 1
17
7
−4
−1
Значит A = − 5 / 2 21 / 2 9 / 2 .
1/ 2 − 3 / 2 − 1/ 2
Элементарные преобразования матрицы:
1. Перестановка строк (столбцов) матрицы.
2. Умножение всех элементов какой-либо строки (столбца) на действительное число, не равное нулю.
3. Прибавление к каждому элементу какой-либо строки (столбца) соответствующих элементов другой строки (столбца),
умноженных на действительное число.
Определение. Две матрицы называются эквивалентными, если одна получается из другой с помощью конечного
числа элементарных преобразований.
Для обозначения эквивалентности матриц применяется знак эквивалентности ~. Эквивалентность матриц А и В
записывается следующим образом: A ~ B .
Алгоритм вычисления обратной матрицы A −1 с помощью элементарных преобразований:
1. Приписываем к исходной матрице A справа единичную матрицу того же порядка, разделяя их чертой:
28
( A | E ).
2. С помощью элементарных преобразований или только строк или только столбцов приводим левую матрицу к
единичной, совершая одновременно точно такие преобразования над правой матрицей:
(E | B ) .
3. Полученная справа от вертикальной черты квадратная матрица является обратной к исходной матрице:
A −1 = B .
4. Проверяем правильность вычисления обратной матрицы A −1 , исходя из ее определения: A ⋅ A −1 = E или A −1 ⋅ A = E .
3 5
с помощью элементарных преобразований.
Пример 3.6. Найти матрицу, обратную к A =
8 13
Припишем к исходной матрице справа единичную матрицу второго порядка, разделяя их чертой:
3 5 1 0
.
8 13 0 1
Умножим элементы первой строки на 8, а второй - на 3:
3 5 1 0 ⋅ 8 24 40 8 0
~
8 13 0 1 ⋅ 3 24 39 0 3
Вычтем из элементов второй строки соответствующие элементы первой строки:
8 0
24 40 8 0
24 40
~
24 39 0 3 − I 0 − 1 − 8 3
Умножим элементы первой строки на 1/8, а второй - на (-1) :
8 0 ⋅ 1/ 8 3 5 1 0
24 40
~
0 − 1 − 8 3 ⋅ (−1) 0 1 8 − 3
Вычтем из элементов первой строки соответствующие элементы второй строки, умноженные на 5:
29
3 5 1 0 − 5 II 3
~
0
0 1 8 − 3
Умножим элементы первой строки на 1/3:
3 0 − 39 15 ⋅ 1 / 3 1
~
0 1
0
8
− 3
0
1
− 39 15
− 3
8
0
− 13
1
8
5
.
− 3
− 13 5
.
Проверочные действия студентам предлагается выполнить самостоятельно. Значит, A −1 =
8
3
−
2 2
1
Пример 3.7. Найти матрицу, обратную к A = 2
3 6 с помощью элементарных преобразований.
−1 − 2 1
Припишем к исходной матрице справа единичную матрицу третьего порядка, разделяя их чертой:
2 2 1 0 0
1
2
3 6 0 1 0 .
−1 − 2 1 0 0 1
Вычтем из элементов второй строки соответствующие элементы первой строки, умноженные на два, и прибавим к
элементам третьей строки соответствующие элементы первой строки:
2 2 1 0 0
1 2 2 1 0 0
1
−
−
−
2
3
6
0
1
0
2
I
~
0
1
2
2
1
0
.
−1 − 2 1 0 0 1 + I 0 0 3 1 0 1
Умножим элементы третьей строки на 1/3:
30
1 2 2 1 0 0
1 2 2 1 0 0
~ 0 −1 2 − 2 1 0 .
0 − 1 2 − 2 1 0
0 0 3 1 0 1 ⋅ 1/ 3 0 0 1 1/ 3 0 1/ 3
Вычтем из элементов первой строки и второй строки соответствующие элементы третьей строки, умноженные на 2:
1 2 2 1 0 0 − 2 III 1 2 0 1 / 3 0 − 2 / 3
−
−
−
−
−
−
/
3
3
1
2
8
/
0
0
1
~
2
0
1
2
0
1
2
III
.
0 0 1 1/ 3 0 1/ 3
0 0 1 1/ 3 0 1/ 3
Прибавим к элементам первой строки соответствующие элементы второй строки, умноженные на 2:
1 2 0 1 / 3 0 − 2 / 3 + 2 II 1 0 0 − 5 2 − 2
0 − 1 0 − 8 / 3 1 − 2 / 3
~ 0 − 1 0 − 8 / 3 1 − 2 / 3 .
0 0 1 1/ 3 0 1/ 3
0 0 1 1/ 3 0 1/ 3
Умножим элементы второй строки на (-1):
1 0 0 − 5 2 − 2
1 0 0 − 5 2 − 2
0 − 1 0 − 8 / 3 1 − 2 / 3 ⋅ (−1) ~ 0 1 0 8 / 3 − 1 2 / 3 .
0 0 1 1/ 3 0 1/ 3
0 0 1 1/ 3 0 1/ 3
−5 2 −2
−1
Проверочные действия студентам предлагается выполнить самостоятельно. Значит, A = 8 / 3 − 1 2 / 3 .
1/ 3 0 1/ 3
НАЧАЛО ТЕМЫ
СОДЕРЖАНИЕ
31
Тема 4. Ранг матрицы.
Определение. Минором порядка k заданной матрицы называется определитель любой квадратной матрицы k-го
порядка, которая находится на пересечении произвольных k строк и k столбцов исходной матрицы.
Теперь минор связывается с набором строк и столбцов, а не с элементом определителя. В определении минора порядка
k не указан вид исходной матрицы. Это значит, что оказавшееся ранее полезным понятие, обобщается на более сложные
ситуации.
4 5 2
Пример 4.1. В матрице 3 1 2 выписать миноры всех возможных порядков
− 2 0 5
Выпишем сначала все миноры первого порядка. Для этого выберем в данной матрице одну строку и один столбец,
например, 1-ю строку и 1-ый столбец. Тогда на их пересечении окажется только один элемент a11 = 4 . Рассмотрим минор,
состоящий из этого элемента 4 = 4 . Это и будет один из миноров первого порядка данной матрицы. Укажем остальные
миноры первого порядка:
5 =5
2 =2
3 =3
1 =1
− 2 = −2
0 =0.
Далее выпишем все миноры второго порядка. Для этого выберем в данной матрице две строки и два столбца, например,
4 5
1-ые и 2-ые. Тогда на их пересечении окажутся четыре элемента. Рассмотрим минор, состоящий из них
= −11 . Это
3 1
будет один из миноров второго порядка данной матрицы. Ниже выписаны остальные миноры второго порядка:
32
4 2
=2
3 2
4
=8
1 2
5
−2 0
3
5 2
1
= 10
=2
4
2
−2 5
3
2
= 24
5 2
= 25
0 5
= 19
1 2
=5
−2 0
−2 5
0 5
Минор третьего порядка в данном случае один и будет совпадать с минором самой матрицы, поскольку для его
построения выбираются все строки и все столбцы (по три).
4 5 2
1 2
3 2
3 1
3 1 2 = 4⋅
− 5⋅
+ 2⋅
= 4 ⋅ 5 − 5 ⋅ 19 + 2 ⋅ 2 = −71.
0 5
−2 5
−2 0
−2 0 5
Определение. Рангом матрицы называется максимальный порядок отличного от нуля минора этой матрицы.
Ранг матрицы A обозначается rang ( A) или r ( A) .
Из определения следует:
• Ранг матрицы не превосходит меньшего из ее размеров, т.е.
r ( Am× n ) ≤ min(m, n) .
• Ранг матрицы равен нулю тогда и только тогда, когда все элементы матрицы равны нулю, т.е.
r ( A) = 0 ⇔ A = O .
• Для квадратной матрицы n -го порядка ранг равен n тогда и только тогда, когда матрица невырожденная,т.е.
r ( An×n ) = n ⇔ A ≠ 0 .
Определение. Базисным минором матрицы называется любой отличный от нуля минор, порядок которого равен рангу
данной матрицы. Строки, которые входят в базисный минор, называются базисными строками, а столбцы – базисными
столбцами.
Заметим, что базисных миноров может быть несколько.
Пример 4.2. Определить ранг матрицы из примера 4.1. и указать базисный минор.
33
4 5 2
Максимально возможный порядок минора матрицы из примера 4.1. равен трем. Матрица 3 1 2 имеет только
− 2 0 5
4 5 2
один минор третьего порядка 3
1 2 и он отличен от нуля. Поэтому ранг исходной матрицы равен трем. Указанный
−2 0 5
минор является базисным.
3 1 − 2 7 0
и указать базисный минор.
Пример 4.3. Определить ранг матрицы А =
1
2
0
5
2
Данная матрица имеет 2 строки и 5 столбцов. По первому свойству ранга матрицы r ( А2×5 ) ≤ min(2,5) или r ≤ 2 .
Рассмотрим миноры второго порядка. Поскольку в данной матрице две строки, то обе их выберем при формировании
3 1
минора. Выберем также 1-ый и 2-ой столбцы. На их пересечении будет минор
= 5 . Он отличен от нуля, поэтому
1 2
r ( А) = 2 . Данный минор можно принять за базисный. Если выбирать другие столбцы, то получаться другие миноры второго
порядка, которые в данном случае также будут отличны от нуля. Всего в матрице А можно выделить 10 миноров второго
порядка. Ниже представлены некоторые из них:
3 −2
3 0
3 7
=2
=8
= 6.
1 0
1 2
1 5
Любой из них можно принять за базисный.
1 0 3 7
Пример 4.4. Определить ранг матрицы 1 0 2 7 и указать базисный минор.
3 0 5 21
34
Данная матрица имеет 3 строки и 4 столбца. По первому свойству ранга матрицы r ≤ min(3,4) или r ≤ 3 . Вычислим все
миноры третьего порядка:
1 0 3
1 0 7
0 3 7
1 3 7
1 0 2 = 0,
1 0
7 = 0,
1 2
7 = 0,
0 2
7 = 0.
3 0 5
3 0 21
0 5 21
3 5 21
Все миноры третьего порядка равны нулю, поэтому r ≤ 2 . Далее рассмотрим миноры второго порядка. Всего в данной
матрице можно выделить 18 таких миноров. В данном случае всех их выписывать не нужно, достаточно найти один,
отличный из нуля. Рассмотрим минор, находящийся на пересечении 1-ой, 2-ой строк и 1-го, 3-го столбцов:
1 3
= −1.
1 2
Следовательно, r = 2 . Данный минор можно принять за базисный. Базисными будут также миноры:
1 2
3 7
2 7
= −1
=7
= 7 .
3 5
2 7
5 21
Поиск ранга матрицы большого порядка перебором миноров является трудоемкой задачей. Рассмотрим далее более
эффективный метод определения ранга матрицы.
К введенным ранее трем типам элементарных преобразований матрицы добавим еще два:
4. Отбрасывание нулевой строки или столбца.
5. Транспонирование матрицы.
Теорема. Ранг матрицы не изменяется при ее элементарных преобразованиях.
1 2 0 −1 0
0 0 0 0 0
Пример 4.5. Определить ранг матрицы 3 6 0 2 0
5 10 0 − 1 0
0 0 0 0 0
Отбросим из данной матрицы нулевые строчки и столбцы:
3
0
1.
5
0
35
1 2 0 −1 0
0 0 0 0 0
3 6 0 2 0
5 10 0 − 1 0
0 0 0 0 0
3
0 1 2 − 1 3
1 ~ 3 6 2 1 .
5 5 10 − 1 5
0
Из второго столбца вычтем первый столбец, умноженный на два, и отбросим нулевой второй столбец:
−2I
1 2 − 1 3 1 0 − 1 3 1 − 1 3
3 6 2 1 ~ 3 0 2 1 ~ 3 2 1 .
5 10 − 1 5 5 0 − 1 5 5 − 1 5
Рассмотрим единственный минор третьего порядка.
1 −1 3
3 1
2 1
3 2
3 2 1 = 1⋅
− (−1) ⋅
+ 3⋅
= 11 + 10 − 39 = −18 .
−1 5
5 5
5 −1
5 −1 5
Он отличен от нуля, поэтому r = 3 .
Определение: Матрица называется ступенчатой при условии, что для всех ее строк верно, что если в i-ой строке
первый отличный от нуля элемент стоит на k-ом месте, то во всех последующих строках матрицы все элементы на первых k
местах равны нулю.
Пример 4.6. Ступенчатыми являются, например, матрицы:
36
3 5 −1 2 9
A1 = 0 0 4 2 1 ,
0 0 0 0 0
− 2 7 5 3
A2 = 0 6 7 2 ,
0 0 4 3
4
0
A3 = 0
0
0
5
0
0
0
0
2
2
0 .
0
0
Заметим, что любую матрицу можно привести к ступенчатому виду с помощью элементарных преобразований строк.
Теорема (о ступенчатой матрице). Ранг ступенчатой матрицы равен количеству ее ненулевых строк.
Пример 4.7. По теореме о ступенчатой матрице ранги матриц из примера 4.6. равны:
r ( A1 ) = 2 ,
r ( A2 ) = 3 ,
r ( A3 ) = 2 .
5
2 3
3 7
8
.
Пример 4.8. Определить ранг матрицы A =
1 − 6 1
7 − 2 15
Приведем исходную матрицу с помощью элементарных преобразований к ступенчатому виду:
5
2 3
1 − 6 1
1 − 6
8
8 − 3I 0 25
3 7
3 7
~
1 − 6 1 I ↔ III ~ 2 3
5 − 2 I 0 15
7 − 2 15
7 − 2 15 − 7 I 0 40
1
5 ⋅ 1/ 5
~
3 ⋅ 1/ 3
8 ⋅ 1 / 8
37
1 − 6
0 5
0 5
0 5
1
1 − 6
1
0 5
~
1 − II 0 0
1 − II 0 0
1
1
.
0
0
Полученная ступенчатая матрица имеет две ненулевых строки, следовательно, r ( A) = 2 .
3 −1 3
5 − 3 2
Пример 4.9. Определить ранг матрицы B =
1 − 3 − 5
7 − 5 1
5
3 4
.
0 − 7
4 1
2
Приведем исходную матрицу с помощью элементарных преобразований к ступенчатому виду:
3 −1 3
5 − 3 2
1 − 3 − 5
7 − 5 1
5
1 − 3 − 5
5 − 3 2
3 4
I ↔ III ~
0 − 7
3 −1 3
4 1
7 − 5 1
1 − 3 − 5
0 12 27
0 8 18
0 16 36
1 − 3 − 5
0 − 7
9
3 39 ⋅ 1 / 3 0 4
~
2 26 ⋅ 1 / 2 0 4
9
4 50 ⋅ 1 / 2 0 8 18
2
0 − 7
3 4 − 5I
~
2 5 − 3I
4 1 − 7 I
0 − 7
1 − 3 − 5
0 4
1 13
9
~
1 13 − II 0 0
0
2 25 − 2 II 0 0
0
0 − 7
1 − 3 − 5
0 4
9
1 13
III ↔ IV ~
0
0 0
0 0
0
0 −1
0 0
0 − 7
1 13
.
0 −1
0 0
Полученная ступенчатая матрица имеет три ненулевых строки, следовательно, r ( B) = 3 .
38
Определение. Линейной комбинацией матриц С1,С 2 ,...,С k называется матрица вида
λ1С1 + λ2С 2 + ... + λk С k ,
где λ1 , λ2 ,..., λk -действительные числа, называемые коэффициентами линейной комбинации.
Пример 4.10. Найти матрицу-строку, которая является линейной комбинацией заданных матриц-строк A1,A2 ,A3 ,A4 с
заданными числовыми коэффициентами k1 , k 2 , k 3 , k 4 , если:
k1 = 2,
k 2 = −3,
k3 = 0,
k 4 = 5,
A1 = (1 4 0 − 2),
◄
A2 = (− 3 2 1 5),
A3 = (5 6 − 3 7),
A4 = (− 2 0 3 4).
Умножим сначала матрицы-строки A1, A2 , A3 , A4 на коэффициенты k1 , k 2 , k 3 , k 4 соответственно:
k1 A1 = 2 ⋅ (1 4 0 − 2) = (2 8 0 − 4),
k 2 A2 = −3 ⋅ (− 3 2 1 5) = (9 − 6 − 3 − 15),
k3 A3 = 0 ⋅ (5 6 − 3 7) = (0 0 0 0),
k 4 A4 = 5 ⋅ (− 2 0 3 4) = (− 10 0 15 20).
Далее найдем требуемую линейную комбинацию:
k1 ⋅ A1 + k 2 ⋅ A2 + k3 ⋅ A3 + k 4 ⋅ A4 =
= (2 8 0 − 4) + (9 − 6 − 3 − 15) + (0 0 0 0) + (− 10 0 15 20) =
= (1 2 12 1). ►
Определение. Линейная комбинация называется тривиальной, если все ее коэффициенты равны нулю, и называется
нетривиальной в противном случае.
Определение. Система матриц называется линейно независимой, если любая нетривиальная линейная комбинация
этих матриц отлична от нулевой матрицы.
Определение. Система матриц называется линейно зависимой, если существует нетривиальная линейная комбинация
этих матриц, равная нулевой матрице.
Теорема. Система матриц линейно зависима тогда и только тогда, когда хотя бы одна из матриц является линейной
комбинацией остальных.
Пример 4.11. Выяснить, являются ли матрицы-столбцы линейно зависимыми.
39
3
2
1
− 1
1
3
В1 = ,
В2 = , В3 = .
1
1
1
2
3
1
◄
Рассмотрим линейную комбинацию матриц B1 , B2 , B3 с произвольными коэффициентами λ1 , λ2 , λ3 :
3 0
2
1
1
− 1 0
3
λ1 B1 + λ2 B2 + λ3 B3 = 0 или λ1 + λ2 + λ3 = .
1
1 0
1
3
2
1 0
Последнее соотношение запишем в виде равенства двух матриц-столбцов:
λ1 + 2λ2 + 3λ3 0
3λ1 + λ2 − λ3 0
=
λ1 + λ2 + λ3 0
3λ1 + 2λ2 + λ3 0
Данное равенство выполняется, например, при λ1 = 1, λ2 = −2, λ3 = 1 , т.е. существует нетривиальная линейная
комбинация этих матриц-столбцов, равная нулевой матрице. Следовательно, исследуемая система матриц является линейно
зависимой.►
Рассмотрим произвольную матрицу:
a11 a12 ... a1n
a21 a22 ... a2 n
.
Am×n =
... ... ....
...
a
a
a
...
m
m
mn
1
2
40
Выделим в матрице A cтроки и столбцы, которые также можно рассматривать, как матрицы-строки и матрицыстолбцы:
A1 = (a11 a12 ... a1n ),
a11
a12
a1m
A2 = (a21 a22 ... a2 n ),
a21
a22
a2 m
(4.1)
B1 =
, B2 =
,..., Bn =
.
...
...
...
...
a
a
a
Am = (am1 am 2 ... amn ),
m1
m2
mm
Тогда рассматривая линейную зависимость и линейную независимость матриц (4.1) можно говорить и о линейной
зависимости и линейной независимости строк (столбцов) исходной матрицы A .
Пример 4.12. Показать линейную независимость столбцов единичной матрицы 3-го порядка.
◄
Рассмотрим матрицы-столбцы, компонентами которых являются элементы столбцов единичной матрицы третьего
порядка:
1
0
0
B1 = 0 , B2 = 1 , B3 = 0 .
0
0
1
Составим матричное равенство:
0 0
0
1
λ1 В1 + λ2 В2 + λ3 В3 = 0 или λ1 0 + λ2 1 + λ3 0 = 0 .
1 0
0
0
где λ1 , λ2 , λ3 -некоторые действительные числа.
Последнее соотношение запишем в виде равенства двух матриц-столбцов:
λ1 0
λ2 = 0 ,
λ3 0
41
т.е. λ1 = 0, λ2 = 0, λ3 = 0 . Следовательно, только тривиальная комбинация столбцов единичной матрицы третьего порядка
равна нулевой матрице-столбцу, поэтому исходная система столбцов линейно независимая. ►
Аналогично можно показать линейную независимость строк или столбцов единичной матрицы любого порядка.
Теорема (основная теорема о ранге матрицы). Ранг матрицы равен числу ее линейно независимых строк и столбцов.
Задача определения числа независимых строк (столбцов) матрицы сводится к вычислению ее ранга.
Пример 4.13. Показать линейную зависимость матриц-столбцов в примере 4.11. с помощью основной теоремы о ранге
матрицы.
3
2
1
− 1
1
3
В1 = ,
В2 = , В3 = .
1
1
1
2
3
1
◄
Составим из B1 , B2 , B3 матрицу и найдем ее ранг:
3
1 2 3
1 2
1 2 3
1 2 3
3 1 − 1 − 3I 0 − 5 − 10 ⋅ (− 15 ) 0 1 2
0 1 2
~
~
~
1 1 1 − I 0 − 1 − 2 ⋅ (−1) 0 1 2 − II 0 0 0
1
(
)
⋅
−
I
II
3
2
1
3
0
4
8
0
1
2
0
0
0
−
−
−
−
4
Ранг данной матрицы равен двум, поэтому ее столбцы являются линейно зависимыми. По основной теореме о ранге
матрице заключаем, что два столбца из трех являются линейно независимыми. Для данной системы любая из пар матрицстолбцов является линейно независимой, поскольку ранг матриц, составленной из них также будет равен двум.►
НАЧАЛО ТЕМЫ
СОДЕРЖАНИЕ
42
Раздел 2. Системы линейных уравнений.
Тема 5. Системы линейных уравнений. Нахождение единственного решения системы n линейных
уравнений c n неизвестными.
Система m линейных уравнений с n переменными имеет вид:
a11 x1 + a12 x2 + + a1n xn = b1
a x + a x + + a x = b
21 1
22 2
2n n
2
,
(5.1)
am1 x1 + am 2 x2 + + amn xn = bm
где aij , bi ( i = 1..m; j = 1..n )-произвольные числа, называемые соответственно коэффициентами при переменных xi (i = 1..n) и
свободными членами уравнений.
Определение. Решением системы называется такая совокупность n чисел x1 = k1 , x2 = k 2 ,..., xn = k n , при подстановке
которых каждое уравнение системы обращается в верное равенство.
Определение. Система уравнений называется совместной, если она имеет хотя бы одно решение, и несовместной,
если она не имеет решений.
Определение: Совместная система уравнений называется определенной, если она имеет единственное решение, и
неопределенной, если решений больше одного.
3 x1 + 2 x2 = 9
совместная и определенная, так как имеет единственное решение
Пример 5.1. Система уравнений
3 x1 + x2 = 3
3 x1 + 2 x2 = 5
3 x1 + 2 x2 = 9
несовместная; система уравнений
совместная и
x1 = −1, x2 = 6 ; система уравнений
3 x1 + 2 x2 = 3
6 x1 + 4 x2 = 18
неопределенная, так как имеет более одного, а точнее, бесконечное множество решений x1 = 3 − 2 / 3c, x2 = c .
Ведем обозначения:
43
a11 a12 ... a1n
x
b1
1
a21 a22 ... a2 n
x2
b2
A=
X
B
=
=
;
;
...
... ,
...
... ... ....
a
a
a
x
...
m2
mn
m1
n
bm
где A - матрица коэффициентов при переменных; X - матрица-столбец переменных; B - матрица-столбец свободных членов.
Произведение AX существует, причем элементами полученной матрицы-столбца являются левые части (5.1). Поэтому
систему (5.1) можно записать в матричном виде
(5.2)
AX = B .
3 x + 7 x2 = 2
Пример 5.2. Записать в матричном виде систему линейных уравнений 1
.
+
2
=
13
5
x
x
1
2
Запишем данную систему в матричном виде, поясняя предыдущие рассуждения. Для данной системы A -матрица
коэффициентов при переменных; X - матрица-столбец переменных; B - матрица-столбец свободных членов имеют вид:
x
2
3 7
, X = 1 , B = .
A =
13
5 2
x2
Умножим A на X :
3 7 x1 3 ⋅ x1 + 7 ⋅ x2
.
=
AX =
5 2 x 5 ⋅ x + 2 ⋅ x
2
1
2
Элементы полученной матрицы равны элементам свободных членов системы
3 ⋅ x1 + 7 ⋅ x2 2
= .
5 ⋅ x + 2 ⋅ x 13
1
2
Следовательно, AX = B .
Определение. Системы уравнений называются эквивалентными, если они имеют одно и то же множество решений.
Элементарные преобразования системы линейных уравнений:
• перестановка уравнений;
• умножение обеих частей любого уравнения на любое действительное число, отличное от нуля;
44
прибавление к обеим частям одного уравнения соответственно обеих частей другого уравнения этой системы,
умноженного на любое действительное число.
Теорема. Система линейных уравнений, полученная путём элементарных преобразований над исходной системой,
эквивалентна ей.
Определение. Расширенной матрицей системы уравнений (5.1) называют матрицу, которая состоит из матрицы
коэффициентов при переменных системы и столбца свободных членов, разделенных чертой:
( A | B) .
3 x + 7 x2 = 2
является матрица:
Пример 5.3. Расширенной матрицей системы 1
5 x1 + 2 x2 = 13
•
3 7 2
5 2 13 .
Заметим, что элементарные преобразования системы уравнений соответствуют элементарным преобразованиям строк
расширенной матрицы, поэтому часто, решая систему линейных уравнений, используют расширенную матрицу.
Рассмотрим далее три метода решения систем n линейных уравнений с n неизвестными, имеющих единственное
решение.
Метод обратной матрицы.
Пусть число уравнений системы (5.1) равно числу переменных, т.е. m = n . В этом случае матрица A коэффициентов
при переменных будет квадратной. Предположим также A ≠ 0 . Тогда для матрицы A существует обратная матрица A −1 .
Умножим обе части матричного уравнения (5.2) на A −1 :
A−1 ⋅ A ⋅ X = A−1 ⋅ B .
Поскольку A−1 ⋅ A = E и E ⋅ X = X , то получим:
X = A−1 ⋅ B .
(5.3)
Следовательно, зная обратную матрицу для матрицы коэффициентов при неизвестных, единственное решение можно
получить по формуле (5.3).
45
3 x1 + 5 x2 = 1
Пример 5.4. Решить систему линейных уравнений
методом обратной матрицы.
8 x1 + 13 x2 = 3
Данная система имеет 2 уравнения и 2 переменные. Для исходной системы уравнений:
3 5
,
A =
8
13
x
X = 1 ,
x2
1
B = .
3
Матрица коэффициентов при переменных невырожденная, поскольку
3
5
= 39 − 40 = −1 ≠ 0 . Поэтому
8 13
существует обратная матрица, которая может быть найдена одним из способов, рассмотренных в теме 3 (студентам
предлагается найти обратную матрицу самостоятельно):
A=
− 13 5
.
А −1 =
8
−
3
− 13 5 1 − 13 + 15 2
⋅ =
= .
Далее по формуле (5.3) имеем: X = А −1 В =
8
− 3 3 8 − 9 − 1
Следовательно, исходная система имеет решение: x1 = 2,
x2 = −1.
x − y + z = −2
Пример 5.5. Решить систему линейных уравнений 2 x + y + z = 3 методом обратной матрицы.
x + y + 2z = 1
Данная система имеет 3 уравнения и 3 переменные. Для исходной системы уравнений:
46
x
1 −1 1
A = 2 1 1 , X = y,
1 1 2
z
− 2
B = 3 .
1
1 −1 1
Матрица коэффициентов при переменных невырожденная, поскольку A = 2
1
1 = 5 ≠ 0 . Поэтому существует
1 1 2
обратная матрица, которая может быть найдена одним из способов, рассмотренных в теме 3 (студентам предлагается найти
обратную матрицу самостоятельно):
3 − 2 1/ 5
3 / 5 − 2 / 5
1
1
−1
A = ⋅− 3 1
1 = − 3 / 5 1/ 5
1/ 5 .
5
1 − 2 3 1/ 5 − 2 / 5 3 / 5
Далее по формуле (5.3) имеем:
3/ 5 − 2 / 5 − 2 1
1/ 5
−1
Х = А В = − 3 / 5 1/ 5
1/ 5 ⋅ 3 = 2 .
1 / 5 − 2 / 5 3 / 5 1 − 1
Заметим, что последнее действие можно сделать следующим образом:
3 − 2 − 2
5 1
1
1
1
−1
X = A ⋅B= ⋅ −3 1
1 ⋅ 3 = ⋅ 10 = 2 .
5
5
1 −2 3 1
− 5 − 1
Следовательно, исходная система имеет решение:
47
x = 1,
y = 2,
z = −1 .
Метод Крамера.
Теорема (Крамера). Пусть у квадратной матрицы коэффициентов при переменных в системе из n линейных
уравнений с n переменными определитель ∆ = A ≠ 0 . Пусть ∆ j -определитель матрицы, получаемой из матрицы A заменой
j -го столбца столбцом свободных членов. Тогда система имеет единственное решение, имеющее вид
∆j
( j = 1..n ).
(5.4)
xj =
∆
Способ решения системы линейных уравнений, основанный на формулах Крамера (5.4), получил название метода или
правила Крамера. Заметим, что получить данные формулы можно из равенств (5.3).
x1 − 2 x 2 = −3
методом Крамера.
Пример 5.6. Решить систему линейных уравнений
3x1 + x 2 = 5
A:
Данная система имеет 2 уравнения и 2 переменных. Найдем определитель матрицы коэффициентов при переменных
∆= A =
1 −2
= 7.
3 1
Этот определитель не равен нулю, поэтому по теореме Крамера данная система имеет единственное решение.
Вычислим определители матриц ∆1 ,∆ 2 , полученных из матрицы A заменой соответственно первого и второго столбцов
столбцом свободных членов:
−3 −2
1 −3
∆1 =
=7,
∆2 =
= 14 .
5
1
3 5
Решение находим по формулам Крамера (5.4):
∆
∆
7
14
x1 = 1 = = 1,
x2 = 2 = = 2 .
∆ 7
∆
7
48
2 x + y − z = 0
Пример 5.7. Решить систему линейных уравнений 3 y + 4 z = −6 методом Крамера.
x +z =1
Данная система имеет 3 линейных уравнения и 3 переменные. Найдем определитель матрицы коэффициентов при
переменных A :
2 1 −1
∆= A = 0 3
4 = 13 .
1 0 1
Этот определитель не равен нулю, поэтому по теореме Крамера данная система имеет единственное решение.
Вычислим определители матриц ∆1 , ∆ 2 , ∆ 3 , полученных из матрицы A заменой соответственно первого, второго, третьего
столбцов столбцом свободных членов:
2 1 0
0 1 −1
2 0 −1
∆3 = 0 3 − 6 = 0 .
∆1 = − 6 3 4 = 13 ,
∆ 2 = 0 − 6 4 = −26 ,
1 0 1
1 0 1
1 1
1
Решение находим по формулам Крамера (5.4):
∆
∆ 13
∆
− 26
0
x = 1 = = 1,
y= 2 =
= −2,
z = 3 = = 0 .
∆ 13
∆
13
∆ 13
Метод Гаусса.
Классическим методом решения системы линейных уравнений является метод Гаусса. Он заключается в
последовательном исключении переменных.
Алгоритм решения систем линейных уравнений методом Гаусса подразделяется на два этапа.
На первом этапе осуществляется так называемый прямой ход, когда путём элементарных преобразований над строками
систему приводят к ступенчатой или треугольной форме, либо устанавливают, что система несовместна.
На втором этапе последовательно, начиная с последних по номеру переменных, находятся все остальные переменные.
49
При практическом решении системы линейных уравнений методом Гаусса удобнее приводить к ступенчатому виду не
саму систему уравнений, а расширенную матрицу этой системы, выполняя элементарные преобразования над ее строками.
При этом в расширенной матрице на месте матрицы коэффициентов при переменных нужно получить единичную матрицу,
тогда на месте свободных членов получиться столбец решений.
x − 2 y + 3z = 1
Пример 5.8. Решить систему линейных уравнений 2 x + y − 4 z = 2 методом Гаусса.
3 x − 4 y + 8 z = 6
Составим расширенную матрицу системы:
1 − 2 3 1
2 1 − 4 2 .
3 − 4 8 6
Реализуем прямой ход метода Гаусса. Исключим переменную x из второго и третьего уравнения. Это означает, что в
расширенной матрице нужно получить нули на местах (2,1) и (3,1). Для этого из второго уравнения вычтем две первых
строки, а из третьего - три первых строки:
3 1
1 − 2
1 − 2 3 1
−
−
2
1
−
4
2
2
I
~
0
5
10
0
3 − 4 8 6 − 3I 0 2
− 1 3
Умножим элементы второй строки на
1
:
5
3 1
1 − 2
1 − 2 3 1
0
5
10
0
1
/
5
~
−
0
1
2
0
⋅
−
0 2
− 1 3
0 2 − 1 3
50
Исключим переменную y из третьего уравнения. Это означает, что в расширенной матрице нужно получить нуль на
месте (3,2). Для этого из третьего уравнения вычтем две вторых строки:
1 − 2 3 1
1 − 2 3 1
~ 0 1 − 2 0 .
0 1 − 2 0
0 2 − 1 3 − 2I 0 0
3 3
Умножим элементы третьей строки на
1
:
3
1 − 2 3 1
1 − 2 3 1
~ 0 1 − 2 0 .
0 1 − 2 0
3 3 ⋅ 1 / 3 0 0
1 1
0 0
На данном этапе прямой ход метода Гаусса выполнен: матрица коэффициентов при переменных приведена к
x − 2 y + 3z = 1
треугольному виду. Полученной расширенной матрице соответствует система уравнений:
y − 2z = 0 .
z =1
Выполним обратный ход метода Гаусса. Из последнего уравнения следует, что z = 1. Подстановка найденного значения
z в первое и второе уравнение будет соответствовать появлению нулей на местах (1,3) и (2,3) в расширенной матрице.
Получим на этих местах нули с помощью элементарных преобразований:
1 − 2 3 1 − 3III 1 − 2 0 − 2
0 1 − 2 0 + 2 III ~ 0 1 0 2 .
0 0 1 1
0 0
1 1
51
Из второго уравнения следует, что y = 2 . Аналогично, подстановка значения y = 2 в первое уравнение будет
соответствовать появлению нуля на месте (1,2) в расширенной матрице. Прибавим к первой строке две вторых строки:
1 − 2 0 − 2 + 2 II 1 0 0 2
~ 0 1 0 2 .
0 1 0 2
0 0 1 1
0 0 1 1
На месте матрицы коэффициентов при переменных получилась единичная матрица. На данном этапе расширенной
матрице соответствует система уравнений:
x
y
=2
= 2,
z =1
в которой фактически указаны решения исходной системы. Заметим, что столбец решений находится на месте свободных
членов последней расширенной матрицы.
НАЧАЛО ТЕМЫ
СОДЕРЖАНИЕ
52
Тема 6. Решение систем линейных уравнений в общем случае.
Рассмотрим решение системы m линейных уравнений с n переменными в общем виде. Вопрос о разрешимости
произвольной системы рассматривается в следующих теоремах.
Теорема (Кронекера-Капелли). Система линейных уравнений совместна тогда и только тогда, когда ранг матрицы
системы равен рангу расширенной матрицы этой системы.
Теорема. Если ранг матрицы совместной системы равен числу переменных, то система имеет единственное решение.
Теорема. Если ранг матрицы совместной системы меньше числа переменных, то система имеет бесконечное
множество решений.
Решение произвольных систем линейных уравнений основано на методе Гаусса и рассмотрено ниже. А пока приведем
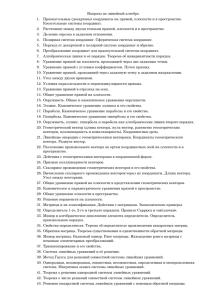
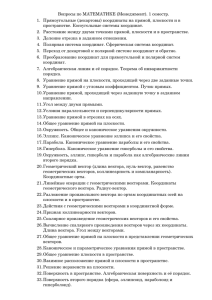
результаты приведенных теорем в виде схемы на рис.6.1.
Система m линейных уравнений
с n неизвестными
AX = B
Совместная
r(A)=r(A|B)=r
Определенная
r=n
Несовместная
r(A)≠r(A|B)
Неопределенная
r<n
Рис.6.1. Схема произвольной системы линейных уравнений.
53
При решении произвольной системы в первую очередь нужно выяснить ее совместность. Для этого нужно
расширенную матрицу исходной системы с помощью элементарных преобразований ( A | B ) привести к ступенчатому виду
( A1 | B1 ) . Затем найти ранги матрицы ( A1 ) и ( A1 | B1 ) , которые равны соответственно рангам матриц ( A) и ( A | B ) , т.е.
r ( A) = r ( A1 )
r ( A | B) = r ( A1 | B1 )
Если r ( A1 ) ≠ r ( A1 | B1 ) , то исходная система является несовместной, т.е. решений не имеет. Далее пусть
r ( A1 ) = r ( A1 | B1 ) = r и, следовательно, по теореме Кронекера-Капели система является совместной. Появление в матрице
( A1 | B1 ) нулевых строк свидетельствует о линейной зависимости строк матрицы ( A | B ) , т.е. уравнений исходной системы.
Число r показывает соответственно число линейно независимых уравнений системы. При r = n для нахождения решения
можно воспользоваться методами обратной матрицы, Крамера, Гаусса.
При r < n исходная система линейных уравнений является неопределенной, т.е. имеет бесконечное множество
решений.
Определение. Переменные называются базисными (основными), если определитель матрицы из коэффициентов при
них (базисный минор) отличен от нуля.
Поскольку матрица может иметь несколько базисных миноров, то возможны варианты выбора базисных переменных.
Итак, из всех переменных выделяют r базисных или основных переменных. Остальные n − r переменных называются
свободными или неосновными. Для того, чтобы выразить базисные переменные через свободные, далее в матрице ( A1 | B1 )
матрицу коэффициентов при базисных переменных приводят к единичной матрице (здесь используют идеи метода Гаусса).
От получившейся матрицы затем переходят обратно к системе линейных уравнений. Затем базисные переменные оставляют
слева от знаков равенства, а свободные переменные переносят вправо, т.е. выражают базисные переменные через свободные
переменные. Свободным переменным присваивают значения произвольных констант. Базисные переменные будут равны
выражениям, зависящим от этих констант. Назначая определенные значения этим константам, получаются решения
исходной системы. Поскольку вводимые константы могут принимать бесконечное число значений, то решений также будет
бесконечное множество.
Определение. Общим решением неопределенной системы линейных уравнений называется такое решение системы,
из которого можно получить все возможные решения изменением произвольных констант.
3 x1 + 2 x2 = 5
Пример 6.1. Исследовать систему уравнений
и найти решение, если возможно.
3 x1 + 2 x2 = 3
54
◄
Запишем расширенную матрицу системы:
3 2 5
3 2 3
Приведем эту матрицу к ступенчатому виду, используя элементарные преобразования:
3 2 5
3 2 5
~
3 2 3 − I 0 0 − 2
Следовательно:
3 2 5
= 2.
r ( A | B) = r
0 0 − 2
3 2
=1
r ( A) = r
0 0
Как видим r ( A) ≠ r ( A | B) , поэтому система решений не имеет.►
3 x1 + 2 x2 = 9
и найти решение, если возможно.
Пример 6.2. Исследовать систему уравнений
3 x1 + x2 = 3
◄
Запишем расширенную матрицу системы:
3 2 9
.
3 1 3
Приведем эту матрицу к ступенчатому виду, используя элементарные преобразования:
3 2 9
3 2 9
3 2 9
.
~
~
3 1 3 − I 0 − 1 − 6 ⋅ (−1) 0 1 6
Следовательно,
55
3 2
=2
r ( A) = r
0 1
3 2 5
= 2.
r ( A | B) = r
0 1 6
Поэтому r ( A) = r ( A | B) = 2 и равно числу неизвестных, поэтому система имеет единственное решение. Найдем его
методом Гаусса:
3 2 9 − 2 I 3 0 − 3 ⋅ 13 1 0 − 1
~
.
~
0 1 6
0 1 6
0 1 6
Следовательно, x1 = −1, x2 = 6 .►
3 x1 + 2 x2 = 9
и найти решение, если возможно.
Пример 6.3. Исследовать систему уравнений
6 x1 + 4 x2 = 18
◄
Запишем расширенную матрицу системы:
3 2 9
.
6 4 18
Приведем эту матрицу к ступенчатому виду, используя элементарные преобразования:
3 2 9
3 2 9
.
~
6 4 18 − 2 I 0 0 0
Следовательно:
3 2
=1
r ( A) = r
0 0
3 2 9
= 1.
r ( A | B) = r
0 0 0
Поэтому r = r ( A) = r ( A | B) = 1 , причем r меньше числа неизвестных, поэтому система имеет бесконечное множество
решений. Здесь будет одна базисная переменная ( r = 1 ) и одна свободная переменная ( n − r = 2 − 1 = 1). В качестве базисной
56
переменной можно взять как x1 , так и x2 , поскольку определитель матрицы из коэффициентов при них 3 ≠ 0 и 2 ≠ 0
соответственно. Пусть базисной переменной будет x1 , тогда x2 -свободная переменная.
Приведем матрицу коэффициентов при базисной переменной к единичной матрице первого порядка ( r = 1 , E1 = (1) ):
3 2 9 ⋅ 13 1 2 / 3 3
~
.
0 0 0
0 0 0
От получившейся матрицы перейдем к системе линейных уравнений. Поскольку последняя матрица имеет нулевую
строку, то второе уравнение можно не писать, т.е.:
x1 + 2 / 3 x2 = 3
Базисную переменную оставляем слева от знака равенства, а свободную переносим вправо, т.е. выражаем базисную
переменную через свободную:
x1 = 3 − 2 / 3 x2
Свободной переменной присваиваем произвольные значения:
х2 = с .
Следовательно, общее решение системы имеет вид:
x1 = 3 − 2 / 3с
.►
x2 = с
x1 + x2 + x3 = 3
Пример 6.4. Исследовать систему уравнений 2 x1 − x2 + x3 = 2 и найти решение, если возможно.
x1 + 4 x2 + 2 x3 = 5
◄ Приведем расширенную матрицу системы к ступенчатому виду, используя элементарные преобразования:
57
1 3
1 1 1 3
1 1 1 3
1 1
2 − 1 1 2 − 2I ~ 0 − 3 − 1 − 4
~ 0 3 1 4
1 4 2 5 − I 0 3
+ II 0 0 0 − 2
1
2
Следовательно:
1 1 1
r ( A) = r 0 3 1 = 2
0 0 0
1 1 1 3
r ( A | B) = r 0 3 1 4 = 3 .
0 0 0 − 2
Как видим, r ( A) ≠ r ( A | B) , поэтому система решений не имеет.►
x1 − x 2 + 3x3 = −5
Пример 6.5. Исследовать систему уравнений 3x1 − x 2 − x3 = 1 и найти решение, если возможно.
2 x + x − 9 x = 14
2
3
1
◄ Приведем расширенную матрицу системы к ступенчатому виду, используя элементарные преобразования:
1 − 1 3 − 5
1 − 1 3 − 5
1 − 1 3 − 5
1 − 1 3 − 5
~ 0 1 − 5 8 .
3 − 1 − 1 1 − 3I ~ 0 2 − 10 16 ⋅ 1 / 2 ~ 0 1 − 5 8
2 1 − 9 14 − 2 I 0 3 − 15 24 ⋅ 1 / 3 0 1 − 5 8 − II 0 0
0 0
Следовательно,
1 −1 3
r ( A) = r 0 1 − 5 = 2,
0
0 0
1 − 1 3 − 5
r ( A | B) = r 0 1 − 5 8 = 2.
0 0
0 0
Поэтому r = r ( A) = r ( A | B) = 2 и меньше числа неизвестных ( n = 3 ), поэтому система имеет бесконечное множество
решений. Здесь будет две базисных переменных ( r = 2 ) и одна свободная переменная ( n − r = 3 − 2 = 1 ). В качестве
58
базисных переменных выберем x1 и x2 , поскольку определитель матрицы из коэффициентов при них
1 −1
0
1
= 1 ≠ 0 . Тогда
x3 -свободная переменная.
Приведем матрицу коэффициентов при базисных переменных к единичной матрице второго порядка:
1 − 1 3 − 5 + II 1 0 − 2 3
0 1 − 5 8
~ 0 1 − 5 8.
0 0
0 0
0 0 0 0
От получившейся матрицы перейдем к системе линейных уравнений. Поскольку последняя матрица имеет нулевую
строку, то третье уравнение можно не писать, т.е.:
x1 − 2 x3 = 3
x 2 − 5 x3 = 8
Базисные переменные оставляем слева от знака равенства, а свободную переносим вправо, т.е. выражаем базисные
переменные через свободную:
x1 = 3 + 2 x3
x 2 = 8 + 5 x3
Свободной переменной присваиваем произвольные значения:
х3 = с .
Следовательно, общее решение системы имеет вид:
x1 = 3 + 2c
x2 = 8 + 5c .►
x = c
3
Пример 6.6. Исследовать систему уравнений и найти решение, если возможно:
59
x1 + x 2 − 2 x3 + 2 x 4 = −1
3 x + 5 x + 6 x − 4 x = −5
1
2
3
4
.
x
x
x
x
4
5
2
3
5
+
−
+
=
−
2
3
4
1
3 x1 + 8 x 2 + 24 x3 − 19 x 4 = −8
◄ Приведем расширенную матрицу системы к ступенчатому виду, используя элементарные преобразования:
1
3
4
3
1 −2
2 − 1
2 −1
1
1 1 − 2
1
5 6
− 4 − 5 − 3I 0 2 12 − 10 − 2 ⋅ 2 0
~
~
0
5 −2
3 − 5 − 4I
0 1 6
− 5 −1
8 24 − 19 − 8 − 3I 0 5 30 − 25 − 5 ⋅ 15 0
1 −2
1
6
1
6
1
6
2 − 1
1 1 − 2 2 − 1
0 1 6 − 5 − 1
− 5 − 1
~
− 5 − 1 − II
0 0 0
0 0
− 5 − 1 − II 0 0 0
0 0
Следовательно:
r ( A) = 2
r ( A | B) = 2 .
Поэтому r = r ( A) = r ( A | B) = 2 и r < 4 (меньше числа переменных), поэтому система имеет бесконечное множество
решений. Здесь будет две базисных переменных ( r = 2 ) и две свободных переменных ( n − r = 4 − 2 = 2 ). В качестве
1 1
базисных переменных выберем x1 и x2 , поскольку определитель матрицы из коэффициентов при них
= 1 ≠ 0 . Тогда
0 1
x3 , x4 -свободные переменные.
Приведем матрицу коэффициентов при базисных переменных к единичной матрице второго порядка:
1 1 − 2 2 − 1 − I 1 0 − 8 7 0
.
~
0 1 6 − 5 − 1
0
1
6
5
1
−
−
60
От получившейся матрицы перейдем к системе линейных уравнений. Поскольку последние две строки матрицы
нулевые, то третье и четвертое уравнение можно не писать, т.е.:
x1 − 8 x3 + 7 x4 = 0
.
x
+
6
x
−
5
x
=
−
1
3
4
2
Затем базисные переменные оставляем слева от знака равенства, а свободные переносим вправо и свободным
переменным присваиваем произвольные значения, т.е. находим общее решение системы:
x1 = 8c1 − 7c2
x2 = −1 − 6с1 + 5с2
.►
=
x
c
3 1
x4 = c2
Определение. Система линейных уравнений называется однородной, если все ее свободные члены равны нулю и
неоднородной в противном случае.
Однородная система имеет вид:
a11 x1 + a12 x2 + + a1n xn = 0
a21 x1 + a22 x2 + + a2 n xn = 0
или AX = 0 .
am1 x1 + am 2 x2 + + amn xn = 0
Однородная система линейных уравнений всегда совместна, так как она всегда имеет, по крайней мере, нулевое (или
тривиальное) решение:
x1 = 0, x2 = 0,..., xn = 0.
Решения системы линейных однородных уравнений обладают следующими свойствами:
• Если решение однородной системы умножить на любое действительное число, то получится решение той же самой
системы.
• Сумма двух решений однородной системы является решением этой же системы.
61
Из сформулированных свойств следует, что всякая линейная комбинация решений однородной системы также является
решением этой системы.
Фундаментальной системой решений называется
Определение. Система линейно независимых решений X 1 , X 2 ,..., X k однородной системы линейных уравнений
называется фундаментальной, если каждое решение исходной системы является их линейной комбинацией.
Теорема. Если ранг r матрицы коэффициентов при переменных однородной системы линейных уравнений меньше
числа переменных n, то всякая её фундаментальная система решений состоит из n-r решений.
Итак, общее решение однородной системы имеет вид
с1 X 1 + с 2 X 2 + ... + с k X k
где X 1 , X 2 ,..., X k -любая фундаментальная система решений, с1 , с2 ,..., сk -произвольные числа; k = n − r . Поэтому проблема
нахождения общего решения однородной системы линейных уравнений сводится к отысканию ее фундаментальной системы
решений.
Для нахождения фундаментальной системы решений однородной системы также, как и в случае неоднородной
системы, ее r базисных переменных выражают через свободные переменные. Затем поочередно заменяют n − r свободных
переменных элементами каждой строки единичной квадратной матрицы порядка n − r (этим достигается линейная
независимость векторов) и находят соответствующие значения базисных переменных. Из полученных значений переменных
формируют вектора.
Пример 6.7. Найти фундаментальную систему решений и общее решение системы:
x1 + x2 − 2 x3 + 2 x4 = 0
3 x1 + 5 x2 + 6 x3 − 4 x4 = 0
.
4 x1 + 5 x2 − 2 x3 + 3 x4 = 0
3 x1 + 8 x2 + 24 x3 − 19 x4 = 0
◄ Заметим, что левая часть системы взята из примера 6.6. Сначала матрицу коэффициентов при неизвестных приведем к
ступенчатому виду (как и в примере 6.6):
62
1
0
0
0
1 −2
1
6
0
0
0
0
2
− 5
0
0
Также в качестве базисных переменных выберем x1 и x2 , а свободных- x3 , x4 . Приведем матрицу коэффициентов при
базисных переменных к единичной матрице второго порядка:
1 1 − 2 2 − I 1 0 − 8 7
.
~
0 1 6 − 5
0 1 6 − 5
От получившейся матрицы перейдем к системе линейных уравнений и выразим базисные переменные через свободные:
x1 = 8 x3 − 7 x4
x2 = −6 x3 + 5 x4
1 0
. Свободным переменным
единичную матрицу Е2 =
0 1
присваиваем сначала значения элементов первой строки этой матрицы, т.е. x3 = 1, x4 = 0 . Из последней системы определяем
x1 = 8 ⋅ 1 − 7 ⋅ 0 = 8, x2 = −6 ⋅ 1 + 5 ⋅ 0 = −6 . Затем свободным переменных присваиваем значения элементов второй строки
единичной матрицы E2 : x3 = 0, x4 = 1 , тогда x1 = 8 ⋅ 0 − 7 ⋅ 1 = −7, x2 = −6 ⋅ 0 + 5 ⋅ 1 = 5 . Фундаментальная система исходной
системы линейных уравнений состоит из векторов
− 7
8
−
6
5
(6.1)
X1 = ,
X2 = .
0
1
1
0
Общее решение системы имеет вид:
Далее используем 2-го ( n − r = 4 − 2 = 2 ) порядка
63
x1 = 8c1 − 7c2
− 7
8
5
− 6
x2 = −6с1 + 5с2
или
.►
X = с1 ⋅ + с2 ⋅
x
=
c
0
1
3 1
1
0
x4 = c2
Теорема. Общее решение системы линейных уравнений AX = B равно сумме общего решения соответствующей ей
однородной системы AX = 0 и произвольного частного решения исходной системы AX = B :
X = X Ч + с1 X 1 + с2 X 2 + ... + сk X k ,
где X и X Ч -соответственно общее и частное решения системы AX = B , X 1 , X 2 ,..., X k -любая фундаментальная система
решений системы AX = 0 .
Пример 6.8. Убедиться в справедливости теоремы об общем решении системы линейных уравнений для данных из
примера 6.6.
x1 = 8c1 − 7c2
x2 = −1 − 6с1 + 5с2
.
◄
В примере 6.6. было получено общее решение системы в виде:
x
c
=
3 1
x4 = c2
8⋅0 − 7⋅0 0
− 1 − 6 ⋅ 0 + 5 ⋅ 0 − 1
= .
Найдем произвольное частное решение неоднородной системы при с1 = 0, с2 = 0 : X Ч =
0
0
0
0
В примере 6.7. была получена фундаментальная система решений (6.1) соответствующей однородной системы
уравнений.
Следовательно, согласно последней теореме:
64
x1 = 8c1 − 7c2
− 7
8
0
5
− 6
− 1
x2 = −1 − 6с1 + 5с2
.
X = X Ч + c1 X 1 + c2 X 2 = + с1 ⋅ + с2 ⋅ или X =
x
c
=
0
1
0
3 1
1
0
0
x4 = c2
Последнее выражение совпадает с общим решением, полученным в примере 6.6. Но в общем случае решения
неоднородной системы, полученные описанными выше двумя способами, визуально могут и не совпадать. ►
НАЧАЛО ТЕМЫ
СОДЕРЖАНИЕ
65
Раздел 3. Элементы аналитической геометрии.
Тема 7. Метод координат.
Определение. Координатной осью называется прямая линия с указанными на ней направлением, началом отсчета и
выбранной масштабной единицей.
Определение. Системой координат называется способ задания положения точек.
Рассмотрим совокупность одной (на прямой), двух (на плоскости), трех (в пространстве) или более пересекающихся
координатных осей в одной точке−начале координат. Если в качестве координатных осей берутся прямые,
перпендикулярные друг другу, то говорят, что задана прямоугольная или ортогональная система координат.
Прямоугольная система координат, в которой единицы измерения по всем осям равны друг другу, называется
ортонормированной или декартовой системой координат. Далее будем рассматривать только декартовую систему
координат (существуют также сферическая, цилиндричекая, полярная и др. системы координат).
На плоскости вводятся две координатных оси: ось Ox или ось абсцисс и ось Oy или ось ординат. В пространстве
вводятся три координатных оси: ось Ox или ось абсцисс, ось Oy или ось ординат, ось Oz или ось аппликат.
Определение. Координатой точки М на прямой называется расстояние от начала координат О до этой точки, взятое
со знаком «+», если направление отрезка ОМ совпадает с направлением оси, и со знаком «−» в противном случае.
Определение. Координатами точки в декартовой системе координат называется упорядоченный набор координат
проекций этой точки на координатные оси. Таким образом, точка на прямой имеет одну координату M 0 ( x0 ) (рис.7.1), на
плоскости – две координаты M 0 ( x0 , y0 ) (рис.7.2), в пространстве – три координаты M ( x0 , y0 , z 0 ) (рис.7.3).
66
y
M0
y0
1
M0
O
1
x
x0
O
Рис. 7.1. Координаты точки
на прямой.
x0
1
х
Рис. 7.2. Координаты точки
на плоскости.
z
z0
M0
1
1
O 1
y0
y
x0
х
Рис. 7.3. Координаты точки в пространстве.
Пусть здесь и далее нижний индекс у координаты точки совпадает с обозначением самой точки (если не оговорено
иначе). Так, например, x A -абсцисса точки A .
67
В таблице 7.1 приведены формулы вычисления расстояния между точками A и B .
на прямой Ох
Расстояние d между точками A и B .
на плоскости Оху
в пространстве Охуz
d = xB − x A
◄
( x B − x A )2 + ( y B − y A )2
d=
d=
Таблица 7.1.
( x B − x A )2 + ( y B − y A )2 + ( z B − z A )2
Пример 7.1. Построить на координатной плоскости отрезок с концами A(-3;2) B(1;-1) и найти его длину.
Отрезок AB представлен на рис. 7.4. Найдем его длину по формуле из таблицы 7.1.:
y
A
4
3
2
1
-4 -3 -2 -1-10 1 2 3 4
B
-2
-3
-4
х
Рис. 7.4. Рисунок к примеру 7.1.
d=
(1 − (−3) )2 + (− 1 − 2)2
= 4 2 + 32 = 5 .►
Определение. Любая третья точка С на прямой, проходящей через точки А и В, делит отрезок AB в некотором
AC
, причем выбирается знак «+», если точка С находится внутри отрезка AB, и знак «−» в
отношении λ , если λ = ±
CB
противном случае.
68
В частном случае λ = 1 точка С является серединой отрезка AB . Формулы для нахождения координат точки С ,
делящей отрезок АВ в отношении λ , приведены в таблице 7.2.
Пример 7.2. Найти координаты точки С, которая находится вне отрезка АВ и расположена от точки A(−4;3) в два раза
дальше, чем от точки B(1;5) .
◄
Из условия задачи следует, что C делит отрезок AB в отрицательном отношении λ = −2 (
приведенным в таблице 7.2, имеем:
xC =
x A + λx B − 4 − 2 ⋅ 1
=
= 6,
1− 2
1+ λ
yC =
АС
BС
= 2 ). По формулам,
y A + λy B 3 − 2 ⋅ 5
=
= 7.
1+ λ
1− 2
Следовательно, C (6;7) .►
Пример 7.3. Найти координаты точки С , которая является серединой отрезка с концами A(−1;3;5) и B(3;−3;−1) .
◄
По формулам, приведенным в таблице 7.2, имеем:
xC =
Следовательно, C (1;0;2) .►
y + yB 3 − 3
z + zB 5 −1
x A + xB − 1 + 3
=
= 0 , zC = A
=
= 2.
=
= 1 , yC = A
2
2
2
2
2
2
Координаты точки С деления отрезка АВ в отношении λ
на прямой Ох
на плоскости Оху
в пространстве Охуz
x + λx B
xC = A
x + λx B
1+ λ
xC = A
x + λx B
y + λy B
1+ λ
xC = A
yC = A
y + λy B
1+ λ
1+ λ
yC = A
z + λz B
1+ λ
zC = A
1+ λ
Координаты точки С - середины отрезка АВ
на прямой Ох
на плоскости Оху
в пространстве Охуz
Таблица 7.2.
69
xC =
◄
x A + xB
2
x A + xB
2
y A + yB
yC =
2
xC =
x A + xB
2
y + yB
yC = A
2
z + zB
zC = A
2
xC =
Теорема. Площадь треугольника с вершинами A( x A , y A ) , B ( x B , y B ) , C ( xC , yC ) вычисляется по формуле
1
1
1
1
S = ∆,
где
∆ = x A x B xC .
2
y A y B yC
Пример 7.4. Найти площадь треугольника с вершинами A(−2;3) , B (4;−5) , C (−3;1) .
По формуле 7.1 имеем:
1
1
1
1
1
1
1
1
∆ = x A x B xC = − 2 4 − 3 = −20
S = ∆ = − 20 = 10 .►
2
2
y A y B yC
3 −5 1
НАЧАЛО ТЕМЫ
(7.1)
СОДЕРЖАНИЕ
70
Тема 8. Векторы на плоскости и в пространстве.
Определение. Вектором на плоскости или в пространстве называется направленный отрезок, имеющий начальную
и конечную точки.
Вектора могут обозначаться как двумя прописными буквами (означающими начало и конец вектора), так и одной
строчной буквой с чертой или стрелкой сверху, или выделенными жирным шрифтом:
AB , AB , a , a , AB, a .
Начальную точку вектора можно выбирать произвольно, т.е их можно переносить параллельно самим себе.
Определение. Векторы, лежащие на одной прямой или на параллельных прямых, называются коллинеарными.
Определение. Два вектора называются ортогональными, если угол между ними равен π / 2 .
Коллинеарность векторов обозначается с помощью символа ||, а ортогональность - ⊥ .
Определение. Вектор 0 , у которого начало и конец совпадают, называется нулевым.
Предполагается, что нулевой вектор коллинеарен и ортогонален любому вектору.
Определение. Векторы, лежащие в одной плоскости или на параллельных плоскостях, называются компланарными.
Определение. Длиной (нормой или модулем) | AB | вектора AB называется число, равное длине отрезка AB ,
изображающего вектор.
Определение. Два вектора называются равными, если они коллинеарны, одинаково направлены и равны по длине.
Определение. Произведением вектора a на число λ называется вектор b = λa , длина которого равна | b |= λ ⋅ a , а
направление совпадает с направлением вектора a , если λ > 0 и противоположно ему, если λ < 0 .
Определение. Противоположный вектору a называется вектор (−1) ⋅ a или − a .
Определение. Суммой векторов a и b называется вектор c = a + b , начало которого совпадает с началом вектора a ,
а конец с концом вектора b , если b выходит из конца a (правило треугольника).
Определение. Разностью двух векторов a и b называется сумма вектора a и вектора − b , противоположного b .
В параллелограмме, построенном на векторах a = AB и b = AD , одна диагональ- вектор c = AC - представляет сумму
векторов a и b , а другая диагональ- вектор d = DB - их разность (рис.8.1).
Свойства линейных действий над векторами:
1. a + b = b + a
71
2. (a + b ) + c = a + (b + c )
3. α (a + b ) = αa + αb
4. a + 0 = a
5. 0 ⋅ a = 0
C
B
с =a +b
a
с =a −b
A
b
D
Рис.8.1. Сумма и разность векторов.
Определение. Координатами вектора называются координаты его конечной точки, при условии, что начальная точка
вектора лежит в начале координат.
Координатами вектора a = OM 0 на прямой Oх является одно число (a ( x0 )) , на плоскости Oxy - два числа
( a ( x0 ; y0 ) )(рис. 8.2.), а в пространстве Oxyz –три числа ( a = ( x0 ; y0 ; z 0 ) )(рис. 8.3.).
72
z
y
z0
M0
y0
a
a
O
O
x0
M0
y0
x
y
x0
Рис.8.2. Координаты вектора
на плоскости Oxy.
x
Рис.8.3. Координаты вектора
в пространстве Oxyz.
Длину вектора можно найти по формулам, приведенным в таблице 8.1.
на прямой Ох
a ( x0 )
a = x0
Таблица 8.1.
Длина вектора a
на плоскости Оху
a ( x0 , y 0 )
в пространстве Охуz
a ( x0 , y 0 , z 0 )
a = x02 + y02
a = x02 + y02 + z 02
Определение. Вектор единичной длины с направлением, совпадающим с направлением координатной оси, называется
единичным вектором или ортом этой оси.
Рассмотрим орты i , j , направленные вдоль осей Ox,Oy плоскости Oxy соответственно. Тогда вектор a = OM 0 = ( x0 ; y0 )
(рис.8.4) может быть представлен в виде
(8.1)
a = OM 0 = OA + OB = x0 ⋅ i + y0 ⋅ j
73
y
M0
B y0
a = x0 i + y 0 j
1
j
0
i 1
A x0
x
Рис.8.4. Разложение вектора по ортам координатных осей.
Аналогично, в пространстве Oxyz вектор a = OM 0 = ( x0 ; y0 ; z 0 ) может быть представлен в виде
OM 0 = x0 ⋅ i + y0 ⋅ j + z 0 ⋅ k ,
(8.2)
где i , j , k -орты, направленные вдоль осей Ox,Oy,Oz соответственно.
Формулы (8.1) и (8.2) называются разложением вектора по ортам координатных осей. Векторы x0i , y0 j , z 0 k
называются компонентами или составляющими вектора a = x0i + y0 j + z 0 k .
Используя разложение вектора по ортам координатных осей, можно получить формулы линейных действий над
векторами в координатах, которые приведены в таблице 8.2.
Таблица 8.2
Линейные действия над векторами в координатах
на прямой Ох
на плоскости Оху
в пространстве Охуz
a = ( x1 ), b = ( x 2 )
a = ( x1 , y1 ), b = ( x 2 , y 2 )
a = ( x1 , y1 , z1 ), b = ( x 2 , y 2 , z 2 )
λ ⋅ a = (λx1 )
λa = (λx1 , λy1 )
λa = (λx1 , λy1 , λz1 )
a ± b = ( x1 + x2 )
a ± b = ( x1 + x2 , y1 + y 2 ) a ± b = ( x1 ± x2 , y1 ± y 2 , z1 ± z 2 )
Пусть даны две точки A и B . Рассмотрим три вектора AB, OA, OB , где т. О -начало координат. Тогда, AB = OB − OA .
Координаты векторов OA, OB совпадают с координатами точек A и B соответственно. Поэтому, координаты вектора AB и
соответственно его длину, можно найти по формулам, приведенным в таблице 8.3.
74
Таблица 8.3.
Координаты и длина вектора AB
на прямой Ох
на плоскости Оху
в пространстве Охуz
AB( x B − x A )
AB( x B − x A , y B − y A )
AB( x B − x A , y B − y A , z B − z A )
AB = x B − x A
AB =
( x B − x A )2 + ( y B − y A )2
AB =
( x B − x A )2 + ( y B − y A )2 + ( z B − z A )2
Определение. Скалярным произведением двух векторов a и b называется число, обозначаемое как (a , b ) или a ⋅ b ,
равное произведению длин этих векторов на косинус угла ϕ между ними, т.е.
a ⋅ b = a ⋅ b ⋅ cos ϕ .
Теорема. Необходимым и достаточным условием ортогональности двух векторов является равенство нулю их
скалярного произведения, т.е.
a ⋅b = 0 ⇔ a ⊥ b .
Теорема. Два ненулевых вектора a и b составляют острый (тупой) угол тогда и только тогда, когда их скалярное
произведение положительно (отрицательно).
Свойства скалярного произведения:
1. a ⋅ b = b ⋅ a
2. (λ ⋅ a ) ⋅ b = λ ⋅ (a ⋅ b )
3. a ⋅ (b + с ) = a ⋅ b + a ⋅ c
4. a 2 = a
◄
2
π
Пример 8.1. Найти длину вектора с = 2a − 5b , если a = 3, b = 4, угол между векторами a и b равен ϕ = .
3
Используя свойства скалярного произведения, получаем:
c = c ⋅c =
2
(2a − 5b ) ⋅ (2a − 5b ) =
= 4 a − 20 ⋅ a ⋅ b + 25 b
2
4a 2 − 2 ⋅ 2a ⋅ 5b + 25b 2 =
2
= 4a 2 − 2 ⋅ 2a ⋅ 5b + 25b 2 = 4 a − 20 ⋅ a ⋅ b + 25 b
2
=
= 36 − 20 ⋅ 3 ⋅ 4 ⋅
1
+ 400 = 316 = 2 79 .►
2
75
Теорема (выражение скалярного произведения через координаты). Скалярное произведение векторов a = (a x , a y , a z ) и
b = (bx , b y , bz ) равно сумме произведений их одноименных координат:
a ⋅ b = a x ⋅ bx + a y ⋅ b y + a z ⋅ bz .
Следствие. Косинус угла ϕ между векторами a = (a x , a y , a z ) и b = (bx , b y , bz ) равен
a x ⋅ bx + a y ⋅ b y + a z ⋅ bz
cos ϕ =
a x2 + a 2y + a z2 ⋅ bx2 + b y2 + bz2
(8.3)
(8.4)
Следствие. Два вектора a = (a x , a y , a z ) и b = (bx , b y , bz ) ортогональны тогда и только тогда, когда сумма произведений
их одноименных координат равна нулю, т.е.
a ⊥ b ⇔ a x ⋅ bx + a y ⋅ b y + a z ⋅ bz = 0 .
Пример 8.2. Найти скалярное произведение векторов a = 2i − j + 7 k и b = −6i + 3 j + k .
◄
По формуле (8.3) имеем a ⋅ b = 2 ⋅ (−6) + (−1) ⋅ 3 + 7 ⋅ 1 = −8 .►
Пример 8.3. Доказать, что векторы a = (4;−2;1) , b = (2;3;−2) ортогональны.
◄
Найдем скалярное произведение векторов a и b по формуле (8.3):
a ⋅ b = 4 ⋅ 2 + (−2) ⋅ 3 + 1 ⋅ (−2) = 0 .
Следовательно, векторы a и b перпендикулярны.►
Определение. Упорядоченная тройка некомпланарных векторов a, b, c называется правой, если после приведения этих
векторов к общему началу c конца третьего вектора c кратчайший поворот от a к b виден совершающимся против часовой
стрелки. В противном случае данная тройка векторов называется левой.
На рисунке 8.5. тройка векторов a, b, c -правая, а на рисунке 8.6. a, b, c -левая.
76
c
a
c
b
Рис. 8.5. Пример правой тройки
векторов a, b, c .
Рассмотрим две группы троек векторов
b
a
Рис. 8.6. Пример левой тройки
векторов a, b, c .
ab c, b ca, cab ,
b ac, acb , cb a .
Из определения следует, что внутри каждой группы тройки векторов имеют одинаковую ориентацию, причем тройки
векторов первой и второй группы имеют противоположные ориентации.
Определение. Векторным произведением вектора a на вектор b называется вектор c , обозначаемый как c = a × b
или c = [a , b ] и удовлетворяющий следующим трем условиям:
1) вектор c ортогонален к каждому из векторов a и b ;
2) длина вектора с равна произведению длин векторов a и b на синус угла ϕ между ними, т.е.
c = [a , b ] = a ⋅ b ⋅ sin ϕ ;
3) вектор с направлен так, что тройка векторов a, b, c является правой.
Теорема. Необходимым и достаточным условием коллинеарности двух векторов является равенство нулю их
векторного произведения.
77
Свойства векторного произведения:
1. a × b = −(b × a ) ;
2. λ ⋅ (a × b ) = (λ ⋅ a ) × b = a × (λ ⋅ b ) ;
3. (a + b ) × c = a × c + b × c ;
Теорема. Векторное произведение вектора a = (a x , a y , a z ) на вектор
равенству:
i
j
k
a × b = ax
ay
az .
bx
by
bz
b = (bx , b y , bz ) удовлетворяет следующему
(8.5)
Следствие. Если два вектора a = (a x , a y , a z ), b = (bx , b y , bz ) коллинеарны, то их координаты пропорциональны, т.е
ax a y az
=
= .
bx b y bz
◄
Пример 8.4. Найти векторное произведение векторов a = 4i − 5 j + k и b = 3i + 7 k .
Воспользуемся формулой (8.5):
i
j
k
a ×b = 4
3
−5
1.
0
7
Вычислим данный определитель разложением по первой строке:
i
j
k
−5
1
4
1
4
a ×b = 4
−5
1 =i ⋅
− j⋅
+k ⋅
0
7
3
7
3
3
0
7
−5
= −35i − 25 j + 15k .►
0
78
Теорема. Площадь параллелограмма
, построенного на приведенных к общему началу векторах a и b равна длине,
а площадь треугольника S ∆ – половине длины векторного произведения a × b ,т.е.
1
= a ×b ,
S∆ = a × b .
2
Пример 8.5. Найти площадь треугольника с вершинами A(1;2;0), B(3;2;1), C(-2;1;2).
◄
Найдем координаты векторов AB и AC :
AB = (3 − 1;2 − 2;1 − 0) = (2;0;1)
.
AC = (−2 − 1;1 − 2;2 − 0) = (−3;−1;2)
Найдем их векторное произведение:
i
j
k
AB × AC = 2
0
1 =i ⋅
−1
2
−3
0
1
−1
2
− j⋅
2
1
−3
2
+k ⋅
2
0
−3
−1
(8.6)
= i − 7 j − 2k .
По формуле (8.6) имеем:
1
1 2
1
3
AB × AC =
1 + (−7) 2 + (−2) 2 =
54 =
6 .►
2
2
2
2
Определение. Смешанным произведением трех векторов a , b , и c называется число, обозначаемое a b c и равное
скалярному произведению вектора a × b на вектор c , т.е.
a b c = (a × b ) ⋅ c
Свойства смешанного произведения:
1. (a × b ) ⋅ c = a ⋅ (b × c )
2. a b c = b c a = c a b = −a c b = −b a c = −c b a
Теорема. Смешанное произведение векторов a = (a x , a y , a z ) , b = (bx , b y , bz )
и с = (с x , с y , с z ) удовлетворяет
следующему равенству:
S∆ =
79
◄
ax
ay
az
a b с = bx
by
bz .
cx
cy
cz
(8.7)
Пример 8.6. Найти смешанное произведение векторов a = (1;3;−2 ) b = (2;1;3) и с = (1;1;4 ) .
По формуле 8.7 имеем
1
3
−2
ab с = 2
1
3 = −16 .►
1
1
4
Теорема. Смешанное произведение a b c равно объему параллелепипеда V , построенного на приведенных к общему
началу векторах a , b и c , взятому со знаком плюс, если тройка векторов a , b , c правая, и со знаком минус, если тройка
a , b , c левая, т.е.
+ a b c ,
если a b c − правая тройка векторов;
V =
− a b c ,
если a b c − левая тройка векторов.
Следствие. Смешанное произведение a b c положительно, если тройка векторов a b c правая и отрицательно, если
тройка векторов a b c левая.
Следствие. Необходимым и достаточным условием компланарности трех векторов является равенство нулю их
смешанного произведения.
Следствие. Объем треугольной пирамиды, построенной на векторах a , b и c равно:
1
(8.8)
Vпир = a b c
6
Пример 8.7. Найти объём треугольной пирамиды с вершинами A(1;2;1), B(2;5;3), C(2;1;2), D(3;4;-2).
◄
Найдем координаты векторов AB , AC и AD (рис 8.6):
80
a = AB = (2 − 1;5 − 2;3 − 1) = (1;3;2),
A
a
b = AC = (2 − 1;1 − 2;2 − 1) = (1;−1;1),
c = AD = (3 − 1;4 − 2;−2 − 1) = (2;2;−3).
Вычислим смешанное произведение векторов a b c :
1
3
2
с
ab с = 1
D
−1
1 = 24
2
2
−3
По формуле (8.8) имеем:
b
B
C
Рис 8.7. Рисунок к
примеру 8.7.
1
⋅ 24 = 4 .►
6
Пример 8.8. Доказать, что точки A(3;-4;2),B(7;4;1),C(6;-2;3),D(1;0;-1) лежат в одной плоскости.
Найдем координаты векторов AB , AC и AD :
a = AB = (7 − 3;4 − (−4);1 − 2) = (4;8;−1),
Vпир =
◄
b = AC = (6 − 3;−2 − (−4);3 − 2) = (3;2;1),
c = AD = (1 − 3;0 − (−4);−1 − 2) = (−2;4;−3).
Далее вычислим смешанное произведение этих векторов:
4
8
ab с = 3
−2
2
4
−1
1 = 0.
−3
Оно равно нулю, следовательно, векторы AB , AC и AD компланарны и точки A,B,C,D лежат в одной плоскости.►
НАЧАЛО ТЕМЫ
СОДЕРЖАНИЕ
81
Тема 9. Прямая на плоскости.
Определение. Уравнением линии на плоскости называется уравнение с переменными x и y, которому удовлетворяют
координаты любой точки этой линии и только они.
Определение. Любой вектор (не равный нулевому), перпендикулярный прямой, называется нормальным вектором
или вектором нормали этой прямой.
Пусть некоторая прямая проходит через точку М 0 ( x0 , y0 ) перпендикулярно вектору n ( A, B ) . Выберем на прямой
произвольную точку M ( x, y ) (рис. 9.1.). Точка M принадлежит данной прямой тогда и только тогда, когда векторы
M 0 M ( x − x0 , y − y0 ) и n перпендикулярны, т.е. их скалярное произведение равно нулю:
M 0M ⋅ n = 0
A( x − x0 ) + B ( y − y0 ) = 0
n
(9.1.)
M
M0
Рис.9.1. Прямая линия, проходящая через точку M 0
перпендикулярно вектору n
Уравнение (9.1) представляет уравнение прямой, проходящей через точку M ( x0 , y0 ) перпендикулярно вект ору
n ( A, B) .
Обозначив в (9.1) C = − By 0 − Ax0 , получим уравнение
(9.2)
Ax + By + C = 0 ,
которое называется общим уравнением прямой на плоскости. Поскольку вектор n ( A, B ) не нулевой, то коэффициенты A и
B не равны нулю одновременно ( A 2 + B 2 > 0 ). Если прямая задана с помощью общего уравнения (9.2), то вектор n ( A, B)
будет являться вектором нормали для данной прямой.
82
Рассмотрим частные случаи общего уравнения прямой:
1. C = 0 , A ⋅ B ≠ 0 , прямая определяется уравнением Ax + By = 0 и проходит через начало координат.
C
2. A = 0 , B ⋅ C ≠ 0 , прямая определяется уравнением By + C = 0 , т.е. y = − , параллельна оси Ox.
B
C
3. B = 0, A ⋅ C ≠ 0 , прямая определяется уравнением Ax + C = 0, т.е. x = − , параллельна оси Oy.
A
4. B = C = 0, A ≠ 0 , прямая определяется уравнением Ax = 0, т.е. x = 0 , совпадает с осью Oy.
5. A = C = 0, B ≠ 0 , прямая определяется уравнением By = 0 , т.е. y = 0 , совпадает с осью Ox.
Пример 9.1. Построить прямые L1 : 2 x − 3 y + 6 = 0 ; L2 : 2 x + 4 y = 0 ; L3 : 3 x − 9 = 0 ; L4 : y + 4 = 0 .
L1 : При x = 0 в первом уравнении остаётся − 3 y + 6 = 0 , откуда 3 y = 6 , y = 2 . Значит прямая проходит через точку
(0;2) . При y = 0 получаем 2 x + 6 = 0 , x = −3 , т.е. прямая пересекает ось Ох в точке (−3;0) . Остается провести прямую через
найденные точки (0;2) и (−3;0) .
L2 : Прямая 2 x + 4 y = 0 проходит через начало координат. Пусть x = 2 . Тогда 2 ⋅ 2 + 4 y = 0 , т.е. y + 1 = 0 и y = −1 . Это
значит, что прямая проходит через точку (2;−1) . Остается провести прямую через две точки (0;0) и (2;−1) .
L3 : Из уравнения прямой получаем x = 3 . Эта прямая параллельна оси Оу и проходит через точку (3;0 ) .
L4 : Аналогично получаем y = −4 и, следовательно, прямая проходит через точку (0;−4 ) параллельно оси Ох.
Графики данных прямых представлены на рис.9.2.►
83
y
L2
L3
5
4
3
2
1
-5 -4 -3 -2 -1-10
-2
-3
-4
L1
1
2
3
4
5
х
L4
-5
Рис.9.2. Рисунок к примеру 9.1.
Пример 9.2. Написать общее уравнение прямой, проходящей через точку M (2;3) перпендикулярно вектору n = (2;−5) .
◄
Уравнение прямой будем искать в виде (9.1):
2( x − 2) − 5( y − 3) = 0 .
Упрощая данное выражение, получим
2 x − 5 y + 11 = 0 .►
Определение. Всякий ненулевой вектор, коллинеарный данной прямой, называется ее направляющим вектором.
Пусть некоторая прямая проходит через точку М 0 ( x0 , y0 ) параллельно вектору a (l , m) (см.рис.9.3). Рассмотрим
произвольную точку на этой прямой M ( x, y ) . Точка M принадлежит данной прямой тогда и только тогда, когда векторы
M 0 M ( x − x0 , y − y0 ) и a коллинеарны, т.е. M 0 M = ta , где t-параметр ( − ∞ < t < ∞ ), который определяет положение точки
M ( x, y ) на прямой. Из равенства M 0 M = ta получаем параметрические уравнения прямой:
x = x0 + t ⋅ l
y = y0 + t ⋅ m
(9.3)
84
a
M
M0
Рис.9.3. Прямая линия, проходящая через точку M 0
параллельно вектору a .
Разрешая уравнения в системе (9.3) относительно t и приравнивая полученные отношения, приходим к каноническому
уравнению прямой:
x − x0 y − y 0
(9.4)
=
l
m
Пусть прямая проходит через две точки M 1 ( x1 , y1 ), M 2 ( x 2 , y 2 ) . Вектор M 1 M 2 = ( x 2 − x1 , y 2 − y1 ) может быть
направляющим вектором данной прямой. Тогда параметрические уравнения и каноническое уравнение прямой в этом случае
будут иметь вид:
x = (1 − t ) x1 + tx 2
x − x1
y − y1
=
,
.
(9.5)
x 2 − x1 y 2 − y1
y = (1 − t ) y1 + ty 2
Вид параметрических и канонического уравнения прямой определяется неоднозначно, поскольку, во-первых, можно
произвольно выбрать точку на прямой, во-вторых, координаты направляющего вектора определены с точностью до общего
множителя.
Пример 9.3. Написать параметрические уравнения прямой, проходящей через точку M (1;−5) параллельно вектору
a (−3;4) .
◄
Для написания параметрических уравнений прямой воспользуемся формулами (9.3):
x = 1 − 3t
.►
y = −5 + 4t
Пример 9.4. Написать каноническое уравнение прямой, проходящей через точку M (1;−5) параллельно вектору
a (−3;4) .
◄
Для написания канонического уравнения прямой воспользуемся формулой (9.4):
85
x −1 y + 5
.►
=
(−3)
4
Пример 9.5. Написать параметрические и каноническое уравнения прямой, проходящей через точки M 1 (9;−2) и
M 2 (1;4) .
◄
Для написания параметрических уравнений прямой воспользуемся первой из формул (9.3):
x = 9(1 − t ) + t
,
y = −2(1 − t ) + 4t
а канонического- второй из формул (9.3):
x−9 y +2
x−9 y +2
или
.►
=
=
1− 9 4 + 2
−8
6
Пример 9.6. Даны вершины треугольника A(−3;1), B(−2;5), C (4;1) . Написать каноническое уравнение медианы AM .
◄
По формулам, приведенным в таблице 7.2 найдем координаты точки M -середины BC :
x + xC − 2 + 4
y + yC 5 + 1
=
=1
=
= 3.
xM = B
yM = B
2
2
2
2
Далее воспользуемся формулой (9.3) для написания уравнения медианы, проходящей через точки A(−3;1) и M (1;3) :
x + 3 y −1
x + 3 y −1
или
.►
=
=
1+ 3 3 −1
4
2
Перейдем от канонического уравнения прямой (9.4) к общему уравнению. Умножим равенство (9.4) на lm :
( x − x0 )m = ( y − y0 )l
mx − ly − mx0 + ly0 = 0 .
Введя обозначения A = m, B = −l , C = −mx0 + ly0 , получим общее уравнение прямой (9.2). Вектор n (m,−l ) является
нормальным вектором для данной прямой.
Пример 9.7. Даны вершины треугольника A(−3;1), B(−2;5), C (4;1) . Написать каноническое и общее уравнение высоты
AН .
◄
Запишем координаты вектора BC = (6;−4) . Рассмотрим вектор n (4;6) , перпендикулярный BC . Этот вектор является
направляющим для высоты AН , поэтому ее каноническое уравнение может быть записано в виде:
86
x + 3 y −1
=
.
4
6
Умножим это уравнение на 12, перенесем все влево от знака равенства, упростим выражение и в результате получим
общее уравнение высоты AН :
3 x − 2 y + 11 = 0 .►
Уравнение прямой (9.2) можно представить в «отрезках»:
x y
(9.6)
+ = 1,
a b
где a = −C / A, b = −C / B . Прямая, заданная уравнением (9.6) пересекает оси координат в точках (a,0) и (0, b) (cм.рис 9.4.).
y
y
ϕ
О
b
x
b
О
a
x
Рис. 9.4. График прямой линии,
Рис. 9.5. График прямой линии,
заданной уравнением (9.6).
заданной уравнением (9.7).
Из уравнения (9.4) выразим y :
(9.7)
y = kx + b ,
m
где k = , b = y 0 − kx0 . Уравнение (9.7) называется уравнением прямой с угловым коэффициентом. Параметр k равен
l
тангенсу угла ϕ ( k = tgϕ ) наклона прямой к оси Ox, а параметр b - ордината точки пересечения прямой с осью Оy
(см.рис.9.5.).
1
со знаком «+», если С < 0 , и
Умножим общее уравнение прямой (9.2) на нормирующий множитель t = ±
2
2
A +B
знаком «-» в противном случае.
Вводя обозначения:
87
tA = cos ϕ ,
tB = sin ϕ ,
tC = − p ,
получим нормированное уравнение прямой:
(9.8)
x ⋅ cos ϕ + y ⋅ sin ϕ − p = 0 .
Здесь нормальный вектор к прямой (9.8) единичной длины, имеет координаты n (cos ϕ , sin ϕ ) , где ϕ - угол между вектором n
и осью Ох, а p равно расстоянию от начала координат до этой прямой (см. рис. 9.6.).
y
p
n
0
ϕ
x
Рис.9.6. График прямой линии, заданной уравнением (9.8.)
Используя нормированный вид уравнения прямой (9.8) можно получить формулу для вычисления расстояния до нее от
произвольной точки M 0 ( x0 , y 0 ) до прямой:
d = x0 ⋅ cos ϕ + y 0 ⋅ sin ϕ − p
Если прямая задана общим уравнением Ax + By + C = 0 , то расстояние до нее от точки M 0 ( x0 , y 0 ) можно найти по
формуле:
Ax0 + By0 + C
.
(9.9)
d=
A2 + B 2
◄
Пример 9.8. Найти расстояние от точки M (3;2) до прямой 4 x − 3 y + 1 = 0 .
Найдем требуемое расстояние d , используя формулу (9.9.):
4⋅3 − 3⋅ 2 +1 7
d=
= = 1.4 .►
2
2
5
4 + (−3)
88
Пусть даны две прямые. Угол между ними равен углу между их направляющими векторами, нормальными векторами
или разности углов наклона этих прямых к оси Ох. Формулы для определения угла ϕ между двумя прямыми L1 и L2 при
разных вариантах задания этих прямых, представлены в таблице 9.1.
Таблица 9.1.
Соотношение для угла ϕ
Уравнение прямой L2
Уравнение прямой L1
между прямыми L1 и L2
A1 A2 + B1 B2
cos ϕ =
A2 x + B2 y + C 2 = 0
A1 x + B1 y + C1 = 0
A12 + B12 ⋅ A22 + B22
l1l2 + m1m2
x − x1 y − y1
x − x2 y − y 2
cos ϕ =
=
=
l1
m1
l2
m2
l12 + m12 ⋅ l22 + m22
k − k2
tgϕ = 1
y = k1 x + b1
y = k 2 x + b2
1 + k1 ⋅ k 2
Условия параллельности ( ϕ = 0 ) и перпендикулярности ( ϕ = π / 2 ) этих прямых, которые можно получить из формул,
представленных выше, представлены в таблице 9.2.
Таблица 9.2.
Условие
Условие
Уравнение
Уравнение
параллельности перпендикулярности
прямой L1
прямой L2
прямых L1 и L2
прямых L1 и L2
A1 B1
=
A1 x + B1 y + C1 = 0
A2 x + B2 y + C2 = 0
A1 ⋅ A2 + B1 ⋅ B2 = 0
A2 B2
x − x2 y − y 2
l1 m1
x − x1 y − y1
=
=
=
l1 ⋅ l2 + m1 ⋅ m2 = 0
l1
m1
l 2 m2
l2
m2
y = k1 x + b1
y = k 2 x + b2
k1 = k 2
1 + k1 ⋅ k 2 = 0
Пример 9.9. Найти угол между прямыми 3 x + 2 y − 1 = 0 и 5 x − y + 4 = 0 .
◄
Прямые заданы с помощью общего уравнения, поэтому для нахождения угла между ними воспользуемся следующей
формулой, данной в таблице 9.1.:
89
cos ϕ =
A1 A2 + B1 B2
=
3 ⋅ 5 + 2 ⋅ (−1)
=
13
1
2
.
=
=
2
13 ⋅ 26
2
A12 + B12 ⋅ A22 + B22
32 + 2 2 ⋅ 5 2 + (−1) 2
Следовательно, ϕ = π / 4 .►
Определение. Пучком прямых на плоскости называется множество всех прямых данной плоскости, имеющих одну
общую точку, которая называется центром пучка.
Если M 0 ( x0 , y 0 ) -центр пучка, то уравнение пучка можно задать следующим образом:
(9.10)
A( x − x0 ) + B( y − y 0 ) = 0 ,
где A и B –действительные числа, A 2 + B 2 > 0 .
Уравнение пучка прямых, центром которого служит точка пересечения прямых A1 x + B1 y + C1 = 0 и A2 x + B2 y + C 2 = 0
имеет вид:
(9.11)
α ( A1 x + B1 y + C1 ) + β ( A2 x + B2 y + C 2 ) = 0 .
где α и β –действительные числа, α 2 + β 2 > 0 .
Пример 9.10. Через точку пересечения прямых 2 x + 2 y-5 = 0 и 4 x-3 y + 2 = 0 провести прямую, параллельную оси x.
◄
Уравнение такой прямой должно иметь равный нулю коэффициент при x. Поэтому из пучка прямых
A(2 x + 2 y-5) + B(4 x-3 y + 2) = 0 надо выделить прямую с 2 A + 4 B = 0 , то есть A = -2 B . Эта прямая получается, например, при
A = -2, B = 1 и есть − 7 y + 12 = 0 .►
Рассмотрим взаимное расположение двух прямых на плоскости, заданных с помощью общих уравнений
A1 x + B1 y + C1 = 0 и A2 x + B2 y + C 2 = 0 с точки зрения линейной алгебры.
Если прямые пересекаются, то они имеют одну общую точку. Это значит, что система двух уравнений, составленная
из уравнений данных прямых:
0
A1 x + B1 y + C1 =
(9.12)
0
A2 x + B2 y + C2 =
90
A1
имеет единственное решение. По теореме Кронекера-Капелли r
A
2
A1 B1
≠ 0 и соответственно:
A2 B2
B1 A1
= r
B 2 A2
A1 B1
≠
.
A2 B2
B1 C1
= 2 . Это значит, что
B 2 C 2
(9.13)
B1
B1 C1
A
A1
= 2 . Это
= 1, r 1
Если прямые параллельны, то система (9.12) несовместная. В этом случае r
A
B2
B2 C 2
2
A2
A1
С1
A1
B1
значит, что
= 0,
≠ 0 и соответственно
A2
С2
A2
B2
A1 B1 С1
.
(9.14)
=
≠
A2 B2 С 2
Если прямые совпадают, то система (9.12) совместная и неопределенная. В этом случае
B1 C1
B1 A1
A1
= 1, следовательно, коэффициенты уравнений прямых пропорциональны
= r
r
A
B 2 C 2
B 2 A2
2
A1 B1 C1
=
=
.
A2 B2 C 2
(9.15)
Пример 9.11 Исследовать взаимное расположение следующих пар прямых:
а)
2 x − 3 y + 5 = 0 , 4 x − 5 y + 10 = 0 .
б)
2x − 3y + 5 = 0 , 4x − 6 y + 7 = 0 .
в)
2 x − 3 y + 5 = 0 , 4 x − 6 y + 10 = 0 .
91
◄
а)
Отношение коэффициентов при x равно
−3 3
2 1
= . Эти отношения различны, поэтому
= , а при y равно
−5 5
4 2
рассматриваемые прямые пересекаются (см. 9.13).
б)
В этом случае отношения коэффициентов удовлетворяют соотношению
2 −3 5
=
≠ ,
4 −6 7
Поэтому рассматриваемые прямые параллельны (см. 9.14).
в)
Здесь отношения коэффициентов удовлетворяют соотношению
2 −3 5
=
= ,
4 − 6 10
Поэтому рассматриваемые прямые совпадают (см. 9.15).►
Всякая прямая Ax + By + C = 0 делит плоскость на две полуплоскости. В одной из них для всех точек
верно Ax + By + C > 0 , а для другой Ax + By + C < 0 . Первая называется положительной полуплоскостью, а вторая –
отрицательной полуплоскостью относительно прямой Ax + By + C = 0 . В частности, начало координат принадлежит
положительной полуплоскости прямой Ax + By + C = 0 только тогда, когда С>0.
Пример 9.12. Какие из точек
A(2;1), B(−3;1), C (4;2) лежат на прямой 2 x − 5 y + 2 = 0 ? в отрицательной или
положительной полуплоскостях этой прямой?
◄
Вычислим значение выражения 2 x − 5 y + 2 , подставив в него вместо x и y координаты точек A,B,C:
A(2;1) :
2 x − 5 y + 2 = 2 ⋅ 2 − 5 ⋅ 1 + 2 = 1 > 0 , поэтому точка A принадлежит положительной полуплоскости относительно
прямой 2 x − 5 y + 2 = 0 .
B(−3;1) :
2 x − 5 y + 2 = 2 ⋅ (−3) − 5 ⋅ 1 + 2 = −9 < 0 , поэтому точка B принадлежит отрицательной полуплоскости относительно
прямой 2 x − 5 y + 2 = 0 .
C (4;2) :
2 x − 5 y + 2 = 2 ⋅ 4 − 5 ⋅ 2 + 2 = 0 , поэтому точка С лежит на прямой 2 x − 5 y + 2 = 0 .►.
НАЧАЛО ТЕМЫ
СОДЕРЖАНИЕ
92
Тема 10. Плоскость и прямая в пространстве.
Определение. Любой вектор (не равный нулевому), перпендикулярный к данной плоскости, называется ее
нормальным вект ором или вект ором нормали плоскост и.
Пусть плоскость проходит через точку M ( x0 , y0 , z 0 ) перпендикулярно ненулевому вектору n ( A, B, C ) . Возьмем
произвольную точку M ( x, y, z ) , лежащую в этой плоскости (рис. 10.1). Точка M принадлежит данной плоскости тогда и
только тогда, когда векторы M 0 M ( x − x0 , y − y0 , z − z 0 ) и n перпендикулярны, т.е. их скалярное произведение равно нулю
M 0 M ⋅ n = 0 , т.е.
(10.1)
A( x − x0 ) + B( y − y0 ) + C ( z − z 0 ) = 0 .
Уравнение (10.1) представляет уравнение плоскост и, перпендикулярной вект ору n ( A, B, C ) и проходящей через
данную точку M ( x0 , y0 , z 0 ) .
n( A, B, C )
M ( x, y , z )
M 0 ( x0 , y 0 , z 0 )
Рис. 10.1. Плоскость, проходящая через точку M 0
перпендикулярно вектору n .
Раскрыв скобки в уравнении (10.1), его можно привести к виду
Ax + By + Cz + D = 0 ,
(10.2)
где D = − Ax0 − By0 − Cz 0 , A 2 + B 2 + C 2 > 0 . Уравнение (10.2) называется общим уравнением плоскост и.
Заметим, что если плоскость задана общим уравнением (10.2), то вектор n ( A, B, C ) является вектором нормали к этой
плоскости.
93
Рассмотрим различные случаи расположения плоскости в пространстве в зависимости от коэффициентов общего
уравнения (10.2):
6. D = 0 – плоскость проходит через начало координат;
7. A = 0 – плоскость параллельна оси Oх;
8. A = D = 0 - плоскость содержит ось Ох;
9. A = B = 0 – плоскость параллельна плоскости Oxy.
Аналогично определяется расположение плоскости при равенстве нулю других сочетаний коэффициентов уравнения.
Пример 10.1. Написать общее уравнение плоскости, проходящей через точку M (2;3;5) перпендикулярно вектору
n (4;−3;2) .
◄
Для получения уравнения плоскости воспользуемся формулой (10.1):
4( x − 2) − 3( y − 3) + 2( z − 5) = 4 x − 3 y + 2 z − 9 = 0. ►
M 2 ( x2 , y 2 , z 2 )
M 1 ( x1 , y1 , z1 )
M ( x, y , z )
M 3 ( x3 , y 3 , z 3 )
Рис.10.2. Плоскость, проходящая через три данных точки M 1 , M 2 , M 3 .
Пусть точки, не лежащие на одной прямой, определяют некоторую плоскость. Возьмем на этой плоскости
произвольную точку M ( x, y, z ) и составим векторы M 1M 2 , M 1M 3 , M 1M . Точка M ( x, y, z ) лежит в одной плоскости с точками
M 1 , M 2 и M 3 тогда и только тогда, когда векторы M 1M 2 , M 1M 3 , M 1M компланарны, т.е. тогда и только тогда, когда
смешанное произведение этих трех векторов равно нулю, т.е.
x − x1
y − y1 z − z1
(10.3)
x2 − x1 y 2 − y1 z 2 − z1 = 0 .
x3 − x1 y3 − y1 z3 − z1
94
Уравнение
(10.3)
определяет
уравнение
плоскости,
проходящей
через
три
M 1 ( x1 , y1 , z1 ) , M 2 ( x2 , y 2 , z 2 ) , M 3 ( x3 , y3 , z3 ) .
Пример 10.2. Написать уравнение плоскости, проходящей через точки M 1 (0;1;3) , M 2 (2;−1;1) и M 3 (1;2;−1) .
◄
Для получения уравнения плоскости воспользуемся формулой (10.3):
x − 0 y −1 z − 3
x y −1 z − 3
− 2 = 0.
2 − 0 −1−1 1− 3 = 2 − 2
точки
1− 0 2 −1 −1− 3 1
1
−4
Разложим данный определитель по первой строке:
10 x + 6( y − 1) + 4( z − 3) = 0
Упростив полученное выражение, получим уравнение искомой плоскости:
5 x + 3 y + 2 z − 9 = 0 .►
Пример 10.3. Написать уравнение плоскости, проходящей через точку M (2;1;−3) параллельно двум векторам
a1 (3;1;−1) и a2 (−1;2;−1) .
◄
Нормальный вектор искомой плоскости найдем как векторное произведение векторов a1 (3;1;−1) и a2 (−1;2;−1) :
i
j
k
n= 3
1
− 1 = i + 4 j + 7k .
2
−1
−1
Уравнение искомой плоскости будем искать в виде:
x + 4 y + 7z + D = 0 .
Подставим в него координаты точки M и найдем D :
2 + 4 ⋅ 1 + 7 ⋅ (−3) + D = 0 ,
D = 15 .
Поэтому уравнение искомой плоскости имеет вид:
x + 4 y + 7 z + 15 = 0 .►
Уравнение плоскости (10.2) можно представить в «отрезках»:
x y z
+ + = 1,
a b c
(10.4)
95
где a = − D / A, b = − D / B, c = − D / C . Плоскость, заданная уравнением (10.4) пересекает оси координат в точках (a,0,0) ,
(0, b,0) и (0,0, с) .
1
Умножим общее уравнение плоскости (10.2) на нормирующий множитель t = ±
со знаком «+», если
A2 + B 2 + С 2
D < 0 , и знаком «-» в противном случае. Введя обозначения:
tA = cos α , tB = cos β , tC = cos γ , tD = − p ,
получим нормированное уравнение плоскости:
(10.5)
x ⋅ cos α + y ⋅ cos β + z ⋅ cos γ − p = 0 .
Здесь нормальный вектор к плоскости (10.5) единичной длины, имеет координаты n (cosα , cos β , cos γ ) , где α , β , γ - углы
наклона вектора n к осям Ох, Оу и Оz соответственно, а p равно расстоянию от начала координат до этой плоскости.
Используя нормированный вид уравнения плоскости (10.5) можно получить формулу для вычисления расстояния до
нее от произвольной точки M 0 ( x0 , y0 , z 0 ) :
d = x0 ⋅ cos α + y0 ⋅ cos β + z 0 ⋅ cos γ − p .
Расстояние от точки M 0 ( x0 , y 0 , z 0 ) до плоскости, определенной уравнением, Ax + By + Cz + D = 0 находится по
формуле:
Ax0 + By0 + Cz 0 + D
d=
(10.6)
A2 + B 2 + C 2
Пример 10.4. Найти расстояние от точки M (1;−2;3) до плоскости 6 x − 3 y + 2 z − 7 = 0 .
◄
Найдем требуемое расстояние d , используя формулу (10.6.):
6 ⋅ 1 − 3 ⋅ (−2) + 2 ⋅ 3 − 7
11 11
d=
=
= .►
2
2
2
7
49
6 + (−3) + 2
Углом между плоскостями в пространстве называется угол между нормальными векторами этих плоскостей. Если
две плоскости Q1 и Q2 заданы уравнениями A1 x + B1 y + C1 z + D1 = 0 и A2 x + B2 y + C 2 z + D2 = 0 , то величина угла между
ними вычисляется по формуле:
96
cos ϕ =
A1 A2 + B1 B2 + С1С 2
С12
С 22
.
+
+
+
+
⋅
Из этой формулы можно получить для плоскостей Q1 и Q2 условие параллельности ( ϕ = 0 ):
A1 B1 С1
=
=
A2 B2 С 2
и условие перпендикулярности ( ϕ = π / 2 ):
A1 ⋅ A2 + B1 ⋅ B2 + С1 ⋅ С 2 = 0 .
Пример 10.5. Найти угол между плоскостями 2 x − y + 2 z − 5 = 0 и 3 x + 4 y − 7 = 0 .
◄
Для решения задачи воспользуемся формулой (10.7):
2
2 ⋅ 3 + (−1) ⋅ 4 + 2 ⋅ 0
ϕ ≈ 82° .►
cos ϕ =
= ,
2 2 + (−1) 2 + 2 2 ⋅ 32 + 4 2 + 0 2 15
A12
B12
A22
B22
(10.7)
Общее уравнение прямой в пространстве задается как линия пересечения двух плоскостей :
A1 x + B1 y + C1 z + D1 = 0
.
(10.8)
A
x
B
y
C
z
D
0
+
+
+
=
2
2
2
2
Если прямая проходит через точку M 0 ( x0 , y0 , z 0 ) параллельно вектору a (l , m, k ) (направляющему вектору), то можно
получить параметрические уравнения прямой (аналогично получены параметрические уравнения прямой на плоскости в
теме 9):
x = x0 + t ⋅ l
(10.9)
y = y0 + t ⋅ m
z = z + t ⋅ k
0
Разрешая уравнения в системе (10.9) относительно t и приравнивая полученные отношения, приходим к
каноническому уравнению прямой:
x − x0 y − y 0 z − z 0
=
=
.
(10.10)
l
m
k
97
Пример 10.6. Написать каноническое уравнение прямой, проходящей через точку M (2;−4;0) параллельно вектору
a (2;1;−3) .
◄
Для написания канонического уравнения прямой воспользуемся формулой (10.10):
x−2 y+4
z
.►
=
=
2
1
(−3)
Пример 10.7. Найти точку пересечения прямой
◄
Получим параметрические уравнения прямой:
x − 3 y +1 z
с плоскостью 2 x − y + 3 z − 1 = 0 .
=
=
2
3
−1
x = 2t + 3
x − 3 y +1 z
=
=
= t или y = 3t − 1 .
2
3
−1
z = −t
Подставив их в уравнение плоскости, найдем t :
2(2t + 3) − (3t − 1) + 3(−t ) − 1 = 0 ,
t = 3.
Найденное значение t подставляем в параметрические уравнения прямой и находим координаты точки пересечения
M (9;8;−3) .►
Уравнение прямой, проходящей через две точки M 1 ( x1 , y1 , z1 ), M 2 ( x2 , y 2 , z 2 ) , имеет вид:
x − x1
y − y1
z − z1
.
(10.11)
=
=
x2 − x1 y 2 − y1 z 2 − z1
Пример 10.8. Написать каноническое уравнения прямой, проходящей через точки M 1 (5;−2;1) и M 2 (1;4;2) .
◄
Для написания канонического уравнения прямой воспользуемся формулой (10.11):
x − 5 y + 2 z −1
x − 5 y + 2 z −1
или
.►
=
=
=
=
1− 5 4 + 2 2 −1
−4
6
1
Пусть даны две прямые L1 и L2 с направляющими векторами a1 (l1 , m1 , k1 ) и a2 (l2 , m2 , k 2 ) . Тогда угол ϕ между этими
прямыми можно найти из соотношения:
98
l1l2 + m1m2 + k1k 2
cos ϕ =
+
.
(10.12)
+ ⋅
+
+
Из этой формулы можно получить для прямых L1 и L2 условие параллельности ( ϕ = 0 ):
l1 m1 k1
=
=
l 2 m2 k 2
и условие перпендикулярности ( ϕ = π / 2 ):
l1 ⋅ l2 + m1 ⋅ m2 + k1 ⋅ k 2 = 0 .
x − 2 y +1 z − 5 x − 6 y +1 z − 5
=
=
Пример 10.9. Найти угол между прямыми
и
.
=
=
6
3
−2
2
1
−2
◄
В качестве направляющего вектора первой прямой может быть вектор a1 (2;−2;1) , а второй прямой a2 (6;3;−2) . Для
определения угла между ними воспользуемся формулой (10.12):
2 ⋅ 6 + (−2) ⋅ 3 + 1 ⋅ (−2)
4
ϕ ≈ 80° .►
= ,
cos ϕ =
2 2 + (−2) 2 + 12 ⋅ 6 2 + 32 + (−2) 2 21
l12
m12
k12
l22
m22
k 22
Пример 10.10. Написать каноническое уравнение прямой, если она задана общим уравнением
x − 2 y + 3 z − 1 = 0
.
3 x + 2 y − z + 5 = 0
◄
Вычислим направляющий вектор данной прямой, как векторное произведений нормальных векторов плоскостей
x − 2 y + 3z − 1 = 0 , 3x + 2 y − z + 5 = 0 .
i
a=1
j
−2
k
3 = −4i + 10 j + 8k .
3
2
−1
Найдем какую-нибудь точку, лежащую на прямой. Положим x = 0 , а y и z найдем из системы:
y = −3.5
0 − 2 y + 3 z − 1 = 0
,
.
3 ⋅ 0 + 2 y − z + 5 = 0
z = −2
99
Итак, искомая прямая проходит через точку (0;−3.5;−2) параллельно вектору a (−4;10;8) , поэтому ее каноническое
уравнение имеет вид:
x
y + 3.5 z + 2
.►
=
=
−4
10
8
Определение. Совокупность всех плоскостей, проходящих через одну и ту же прямую, называется пучком
плоскостей.
A x + B1 y + C1 z + D1 = 0
, имеет вид:
Уравнение пучка плоскостей, проходящих через прямую 1
A
x
B
y
C
z
D
0
+
+
+
=
2
2
2
2
(10.13)
α ( A1 x + B1 y + C1 z + D1 ) + β ( A2 x + B2 y + C 2 z + D2 ) = 0 .
где α и β –действительные числа, α 2 + β 2 > 0 .
Определение. Совокупность всех плоскостей, проходящих через данную точку называется связкой плоскостей с
центром в этой точке.
Уравнение связки плоскостей с центром M 0 ( x0 , y0 , z 0 ) имеет вид:
(10.14)
A( x − x0 ) + B( y − y0 ) + C ( z − z 0 ) = 0 .
Пример 10.11. Написать уравнение плоскости, проходящей через прямую
пересечения плоскостей
4 x − 3 y − 5 z + 2 = 0 , x + 2 y + z − 5 = 0 перпендикулярно плоскости 3 x − y + z − 5 = 0 .
◄
Уравнение плоскости, проходящей через прямую пересечения данных плоскостей будет искать в виде (10.13):
α (4 x − 3 y − 5 z + 2) + β ( x + 2 y + z − 5) = 0 .
x(4α + β ) + y (−3α + 2 β ) + z (−5α + β ) + 2α − 5β = 0 .
Данная плоскость перпендикулярна плоскости 3 x − y + z − 5 = 0 , следовательно, ортогональны также вектора нормали
n1 (4α + β ;−3α + 2 β ;−5α + β ) и n2 (3;−1;1) этих плоскостей. Приравняем к нулю скалярное произведение нормальных
векторов n1 ⋅ n2 = 0 :
(4α + β ) ⋅ 3 + (−3α + 2 β ) ⋅ (−1) + (−5α + β ) ⋅ 1 = 0
10α + 2 β = 0
β = −5α .
Подставляя значение β = −5α в общее уравнение плоскости, записанное выше, получим:
x(−α ) + y (−13α ) + z (−10α ) + 27α = 0 .
100
Заметим, что α и β одновременно не могут быть равны нулю, причем β = −5α , поэтому α ≠ 0 . Разделим предыдущее
выражение на − α и получим уравнение искомой плоскости:
x + 13 y + 10 z − 27 = 0 .►
В теме 9 рассматривалось взаимное расположение двух прямых на плоскости с точки зрения линейной алгебры.
Аналогично можно рассмотреть взаимное расположение двух плоскостей, плоскости и прямой, или двух прямых в
пространстве.
Рассмотрим взаимное расположение двух плоскостей в пространстве, заданных с помощью общих уравнений
A1 x + B1 y + C1 z + D1 = 0 и A2 x + B2 y + C 2 z + D2 = 0 соответственно, и зависящее от решения системы
A1 x + B1 y + C1 z + D1 = 0
.
(10.15)
A2 x + B2 y + C 2 z + D2 = 0
Введем обозначения:
B1
C1
A1
D1
A=
, B = .
A
D
B2
C2
2
2
Если
r ( A) = r ( A | B) = 1 ,
т.е.
A1 B1 C1 D1
= = =
,
A2 B2 C2 D2
то
плоскости
совпадают.
Если
A1 B1 C1 D1
A
B
= =
≠
, то плоскости параллельны. В остальных случаях r ( A) = 2 , т.е. 1 ≠ 1
A2 B2 C2 D2
A2 B2
пересекаются.
Пример 10.12. Исследовать взаимное расположение следующих пар плоскостей:
а)
3x − 2 y + z − 3 = 0 ,
6x − 4 y + 2z − 6 = 0 ;
б)
3x − 2 y + z − 3 = 0 ,
6x − 4 y + 2z − 5 = 0 ;
в)
3x − 2 y + z − 3 = 0 ,
6x − 4 y − 2z − 6 = 0 .
◄
а)
Отношения коэффициентов удовлетворяют соотношению:
3 −2 1 −3
,
=
= =
6 −4 2 −6
поэтому рассматриваемые плоскости совпадают.
б)
Здесь отношения коэффициентов удовлетворяют соотношению
r ( A) = 1, r ( A | B) = 2 ,
или
т.е.
B1 С1
≠
, плоскости
B2 С 2
101
поэтому рассматриваемые плоскости параллельны.
в)
3 −2 1 −3
=
= ≠
,
6 −4 2 −5
В этом случае отношения коэффициентов при у и z различны
−2
1
, поэтому рассматриваемые плоскости
≠
−4 −2
пересекаются.►
Рассмотрим взаимное расположение прямой и плоскости в пространстве, заданных с помощью общих уравнений
A1 x + B1 y + C1 z + D1 = 0
и A3 x + B3 y + C3 z + D3 = 0 соответственно, и зависящее от решения системы
A2 x + B2 y + C 2 z + D2 = 0
Введем обозначения:
A1 x + B1 y + C1 z + D1 = 0
A2 x + B2 y + C 2 z + D2 = 0 .
A x + B y + C z + D = 0
3
3
3
3
(10.16)
C1
B1
D1
A1
A = A2
B2
C 2 , B = D2 .
D
A
B
C
3
3
3
3
Если r ( A) = 3 ( A ≠ 0 ), то прямая и плоскость пересекаются. Если r ( A) = 2, r ( A | B) = 3 , то прямая и плоскость
параллельны. Если r ( A) = 2, r ( A | B) = 2 , то все три плоскости проходят через заданную прямую, т.е. прямая лежит в
плоскости.
Всякая плоскость Ax + By + Cz + D = 0 делит пространство на два полупространства. В одном из них для всех точек
верно Ax + By + Cz + D > 0 , а для другого Ax + By + Cz + D < 0 . Первое называется положительным полупространством,
а второе – отрицательным полупространством относительно плоскости Ax + By + Cz + D = 0 .
НАЧАЛО ТЕМЫ
СОДЕРЖАНИЕ
102
Тема 11. Кривые второго порядка.
Определение. Кривой второго порядка называется геометрическое место точек плоскости, декартовы координаты
которых удовлетворяют уравнению второго порядка вида:
Ax 2 + Bxy + Cy 2 + Dx + Ey + F = 0 ( A 2 + B 2 + C 2 ≠ 0) .
В частности, окружность, эллипс, гипербола и парабола являются такими линиями.
Оси симметрии кривых второго порядка называют их осями, а центры симметрии их центрами.
Определение. Окружностью называется множество всех точек плоскости, удаленных от заданной точки A этой же
плоскости на одно и тоже расстояние R > 0 . Точка A является центром окружности, а R - радиусом окружности (рис
11.1).
В прямоугольной системе координат уравнение окружности имеет вид
y
(11.1)
( x − x0 ) 2 + ( y − y 0 ) 2 = R 2 ,
R
где ( x0 ; y0 ) - координаты центра, R - радиус окружности. Уравнение (11.1) называется
нормальным уравнением окружности.
A
В частности, если центр окружности совпадает с началом координат, то получаем
каноническое уравнение окружности примет вид
(11.2)
x2 + y2 = R2 .
Пример 11.1. Написать уравнение окружности радиуса R = 5 с центром в точке
0
x
B(−3;4) .
Рис.11.1. Окружность.
◄
Подставив значения радиуса и координат центра окружности - точки B в (11.1),
получим
( x − (−3)) 2 + ( y − 4) 2 = 5 2 или ( x + 3) 2 + ( y − 4) 2 = 5 2 ►.
Пример 11.2. Найти координаты центра и радиус окружности
x2 + y 2 − 4x − 5 = 0 .
◄
Дополнив члены, содержащие x , до полного квадрата, получим:
( x 2 − 4 x + 4) + y 2 − 4 − 5 = 0 или ( x − 2) 2 + y 2 = 32 ,
103
◄
Т.е. центр окружности находится в точке A(2;0) , а ее радиус R = 3 .►
Пример 11.3. Написать уравнение окружности с центром в точке A(2;−5) , проходящей через точку B(6;−2) .
Найдем длину отрезка AB , равную радиусу окружности
R = AB = (6 − 2) 2 + (−2 − (−5)) 2 = 5 .
Следовательно, уравнение искомой окружности имеет вид:
( x − 2) 2 + ( y + 5) 2 = 5 2 .►
Определение. Эллипсом называется геометрическое место точек плоскости, сумма расстояний от каждой из которых
до двух данных точек этой же плоскости, называемых фокусами, есть величина постоянная, большая, чем расстояние между
фокусами.
Пусть оси декартовой системы координат выбраны так, что фокусы данного эллипса располагаются на оси Ох
симметрично относительно начала координат (рис.11.2). Тогда в этой системе координат уравнение эллипса имеет вид
x2 y2
(11.3)
+
= 1.
a2 b2
причем a > b . Уравнение вида (11.3) называется каноническим уравнением эллипса.
При указанном выборе системы координат оси координат являются осями симметрии эллипса, а начало координат его центром. Точки пересечения с осями симметрии эллипса называются его вершинами. В рассматриваемом случае это
будут точки A1 (−a;0), A2 (a;0), B1 (0; b), B2 (0;−b) (рис.11.2). Отрезки A1 A2 и B1 B2 , а также их длины 2a и 2b называются
соответственно осями эллипса. Длины a и b называются соответственно полуосями эллипса.
Координаты фокусов: F1 (−c;0) , F2 (c;0) , где c - половина расстояния
y
между фокусами (рис.11.2). Числа a, b, c связаны соотношением:
B1
(11.4)
c2 = a2 − b2 .
M
Сумма расстояний от любой точки M эллипса до ее фокусов равна
b
MF1 + MF2 = 2a .
c
a
с
и
Эксцентриситетом эллипса называется величина ε =
A1
A2 x
O
F1
F2
a
характеризует его меру сжатия. Так как a > c , то для эллипса ε < 1 .
Очевидно, что если фокусы совпадают, то a = b и эллипс
B2
представляет собой окружность.
104
Рис.11.2. Эллипс.
Если в уравнении (11.3) a < b , то фокусы эллипса расположены на оси Oy симметрично относительно начала
координат. В этом случае
c
с2 = b2 − a2 ,ε = .
b
Уравнение эллипса с осями, параллельными осям координат, имеет вид
( x − x0 ) 2 ( y − y 0 ) 2
= 1,
+
a2
b2
где ( x0 , y0 ) -координаты центра эллипса.
Пример 11.4. Дано уравнение эллипса 25 x 2 + 48 y 2 = 1200 . Найти длины его полуосей, координаты фокусов,
эксцентриситет эллипса.
◄
Запишем уравнение эллипса в каноническом виде, разделив обе его части на 1200:
x2
y2
+ 2 = 1.
2
5
4 3
( )
Отсюда полуоси равны a = 4 3 , b = 5 .
Далее воспользуемся соотношением (11.4):
( )
2
c 2 = 4 3 − 5 2 = 48 − 25 = 23 . Следовательно, фокусы эллипса имеют координаты F1 (− 23;0) , F2 ( 23;0) .
23
= 0.7 .►
4 3
Пример 11.5. Написать каноническое уравнение эллипса, если расстояние между фокусами равно 8, а малая полуось
равна 3.
◄
Поскольку расстояние между фокусами равно 8, то 2с = 8 и с = 4 . Малая полуось равна 3, т.е. b = 3 . Из (11.4) находим
a:
4 2 = a 2 − 32 , a = 5 .
Следовательно, искомое уравнение имеет вид:
x2 y2
+
= 1 .►
25
9
Эксцентриситет эллипса равен ε =
105
Пример 11.6. Написать каноническое уравнение эллипса, проходящего через точку M (−2; 6 ) и имеющего меньшую
полуось b = 3 .
◄
Каноническое уравнение эллипса при b = 3 имеет вид:
x2 y2
+
= 1.
9
a2
4 6
Координаты точки M (−2; 6 ) должны удовлетворять этому уравнению, поэтому 2 + = 1 . Отсюда находим a 2 = 12 .
9
a
Следовательно, искомое уравнение эллипса имеет вид:
x2 y2
+
= 1 .►
12 9
Пример 11.7. Показать, что уравнение 5 x 2 − 10 x + 4 y 2 + 16 y − 59 = 0 определяет эллипс, найти его оси и координаты
центра.
◄
Перепишем уравнение кривой в виде:
y
5( x 2 − 2 x) + 4( y 2 + 4 y ) = 59
Дополняя выражения в скобках до полных квадратов, получим:
5( x 2 − 2 x + 1) + 4( y 2 + 4 y + 4) = 80 .
M
После преобразований имеем:
( x − 1) 2 ( y + 2) 2
2
2
c
5( x − 1) + 4( y + 2) = 80 или
+
= 1.
16
20
A1
A2
F2
F1
O
Последнее выражение и будет каноническим уравнением эллипса с
x
b
центром A(1;−2) . Полуоси эллипса равны a = 16 = 4, b = 20 = 2 5 .
Следовательно, оси эллипса равны 2a = 8, 2b = 4 5 . ►
Определение. Гиперболой называется геометрическое место точек
плоскости, абсолютная величина разности расстояний от каждой из
которых до двух данных точек этой же плоскости, называемых фокусами,
есть величина постоянная, меньшая, чем расстояние между фокусами.
Пусть оси декартовой системы координат выбраны так, что фокусы
a
Рис.11.3. Гипербола.
106
данной гиперболы располагаются на оси Ох симметрично относительно начала координат (рис.11.3). Тогда в этой системе
координат уравнение гиперболы имеет вид
x2 y2
(11.5)
−
= 1.
a2 b2
Уравнение вида (11.5) называется каноническим уравнением гиперболы.
При указанном выборе системы координат оси координат являются осями гиперболы, а начало координат - центром
гиперболы. Две точки пересечения гиперболы с одной из осей называются вершинами гиперболы. На рис. 11.3 вершинами
b
гиперболы являются точки A1 (−a;0) и A2 (a;0) . Асимптотами гиперболы является прямые y = ± x , к которым при
a
больших значениях x приближаются как угодно близко ветви гиперболы. Прямоугольник со сторонами 2a и 2b , диагонали
которого лежат на асимптотах гиперболы, а центр находится точке их пересечения, называется прямоугольником гиперболы.
Величины a и b называются соответственно действительной и мнимой полуосями гиперболы, 2a и 2b называют
соответственно действительной и мнимой осями.
Для любой точки гиперболы (11.5) абсолютная величина разности ее расстояний до фокусов равна MF1 − MF2 = 2a .
Фокусами данной гиперболы являются точки F1 (−c;0) и F2 (c;0) , где
с2 = a2 + b2 .
(11.6)
с
. Так как с > a , то для гиперболы ε > 1 .
a
Гипербола, симметричная относительно координатных осей, с фокусами, расположенными на оси Oy, описывается
уравнением вида
x2 y2
(11.7)
− 2 + 2 = 1.
a
b
В этом случае абсолютное значение разности расстояний от произвольной точки гиперболы до фокусов равно 2b .
с
b
Эксцентриситет этой гиперболы равен ε = , асимптоты определяются уравнениями y = ± x .
b
a
Две гиперболы, которые определяются уравнениями (11.5) и (11.7) называются сопряженными.
Уравнение гиперболы с осями, параллельными осям координат, имеет вид
Эксцентриситетом гиперболы называется величина ε =
107
где ( x0 , y0 ) -координаты центра гиперболы.
( x − x0 ) 2 ( y − y 0 ) 2
= 1,
−
b2
a2
Пример 11.8. Показать, что уравнение 9 x 2 − 16 y 2 = 144 является уравнением гиперболы. Найти длины ее полуосей,
координаты фокусов, эксцентриситет гиперболы, уравнения асимптот.
◄
Разделив обе части уравнения на 144, получим:
x2 y2
−
=1
4 2 32
Это уравнение является уравнением гиперболы, для которой полуоси a = 4 , b = 3 . Из соотношения (11.6) находим
2
с = 16 + 9 = 25 , т.е. с = 5 . Следовательно, фокусами гиперболы являются точки
F1 (−5;0) и F2 (5;0) . Эксцентриситет
3
гиперболы равен ε = 5 / 4 . Асимптотами данной гиперболы являются прямые y = ± x .►
4
Пример 11.9. Написать уравнение гиперболы, если ее фокусы лежат на оси Oy симметрично началу координат и
расстояние между ними равно 10, а длина действительной оси равна 6.
◄
Поскольку фокусы гиперболы лежат на оси Оу симметрично началу координат, то ее уравнение будем искать в виде
(11.7). Согласно условию 2с = 10 , 2b = 6 т.е. с = 5 , b = 3 . Из (11.6) находим мнимую полуось
a 2 = с 2 − b 2 = 5 2 − 32 = 16 , т.е. a = 4 . Следовательно, искомое уравнение гиперболы
y
имеет вид
M
x2 y2
−
+
= 1.►
16 9
Пример 11.10. Написать каноническое уравнение гиперболы, проходящей
p p
через точку M (2;2 3 ) и имеющей эксцентриситет, равный 5 .
2 2
с
◄
По условию ε = = 5 или c 2 = 5a 2 . Поскольку c 2 = a 2 + b 2 , то b 2 = 4a 2 .
O
x
a
F
Следовательно, каноническое уравнение гиперболы имеет вид
x2
y2
−
= 1.
a 2 4a 2
Рис.11.4. Парабола.
108
Координаты точки M (2;2 3 ) должны удовлетворять этому уравнению, поэтому
4
12
−
= 1 . Отсюда находим a 2 = 1 .
2
2
a
4a
Следовательно, искомое уравнение гиперболы имеет вид:
x2 y2
−
= 1.►
1
4
Определение. Параболой называется геометрическое место точек плоскости, каждая из которых равноудалена от
заданной точки этой же плоскости, называемой фокусом, и заданной прямой, называемой директрисой.
Пусть оси декартовой системы координат выбраны так, что ось Ox проходит через фокус данной параболы
перпендикулярно к директрисе и ее ветви направлены по направлению оси абсцисс; начало координат расположено
посередине между фокусом и директрисой (рис.11.4). Тогда в этой системе координат уравнение параболы имеет вид
(11.8)
y 2 = 2 px ,
где p -расстояние от фокуса до директрисы. Уравнение вида (11.8) называется каноническим уравнением параболы.
Уравнение директрисы параболы имеет вид
p
(11.9)
x=−
2
Парабола имеет одну ось и одну вершину, причем при указанном выше выборе координатной системы ось параболы
p
совмещена с осью Ox, а вершина находится в начале координат. Фокусом данной гиперболы является точка F ;0 .
2
Если координатная система выбрана так, что ось Ox совмещена с осью параболы, начало координат - с вершиной, но
ветви параболы направлены в направлении, противоположном оси абсцисс, то ее уравнение будет иметь вид
(11.10)
y 2 = −2 px .
Если в уравнениях (11.8) и (11.10) поменять x и y , то получим
x 2 = 2 py ,
(11.11)
(11.12)
x 2 = −2 py
уравнения параболы с вершиной в начале координат, ось которой совпадает с осью Oy, а ветви направлены по направлению
оси ординат в случае (11.11) и в противоположном направлении в случае (11.12).
109
Уравнение параболы с осью, параллельной координатной оси Ox и ветвями, направленными по направлению оси
абсцисс, имеет вид
( y − y 0 ) 2 = 2 p ( x − x0 ) ,
где ( x0 , y0 ) -координаты вершины параболы. Аналогично можно записать уравнения других парабол с осью, параллельной
любой из осей координат с направлением ветвей, как совпадающим с осями координат, так и с противоположным
направлением.
Пример 11.11. Дана парабола y 2 = 4 x . Написать уравнение ее директрисы и найти координаты ее фокуса.
◄
Сравнивая данное уравнение с каноническим уравнением параболы (11.8), видим, что 2 p = 4, p = 2 . Уравнение
p
p
директрисы имеет вид x = − = −1 . Фокусом является точка с координатами F ;0 или F (1;0) .►
2
2
Пример 11.12. Написать уравнение параболы, расположенной симметрично относительно оси Ox, проходящей через
точку A(6;6) , и имеющей вершину, находящуюся в начале координат.
◄
По условию задачи искомое уравнение параболы имеет вид y 2 = 2 px . Так как точка A(6;6) лежит на параболе, то ее
координаты должны удовлетворять уравнению параболы, а поэтому 6 2 = 2 p ⋅ 6 или p = 3 . Следовательно, искомое уравнение
параболы имеет вид y 2 = 6 x .►
Пример 11.13. Найти вершину, фокус и директрису параболы y = −2 x 2 + 4 x − 4 .
◄
Преобразуем уравнение параболы, выделив в правой части полный квадрат:
y = −2 x 2 + 4 x − 4 = −2( x 2 − 2 x) − 4 = −2( x 2 − 2 x + 1) − 2 = −2( x − 1) 2 − 2 .
1
Следовательно, ( x − 1) 2 = − ( y + 2) . Уравнение параболы имеет вид (11.12), те. Ветви параболы направлены вниз. Вершина
2
1
1
параболы имеет координаты (1;−2) . Параметр p = , поскольку 2 p = . Прямая x = 1 является осью симметрии параболы.
4
2
1
p
7
p
1
Координаты фокуса x = 1; y = −2 − = −2 , т.е. F (1;−2 ) . Уравнение директрисы y = −2 + = −1 .►
2
8
8
2
8
НАЧАЛО ТЕМЫ
СОДЕРЖАНИЕ
110
Раздел 4. Матричный анализ.
Тема 12. Векторные пространства.
Определение. Множество V элементов x,y,z,… называется линейным пространством, если для любых двух
элементов x,y из V определена их сумма x + y ∈V и для любого действительного числа α и любого элемента x из V
определено произведение αx ∈V , причем для любых элементов x, y , z ∈V и любых действительных чисел α , β справедливы
следующие аксиомы:
1) x + y = y + x ;
2) (x + y ) + z = x + (y + z ) ;
3) α (x + y ) = αx + αy ;
(12.1)
4) (α + β )x = αx + βx ;
5) α ( βx) = (αβ )x ;
6) 1 ⋅ x = x ;
7) существует нулевой элемент 0 ∈V такой, что x + 0 = x для любого x ∈V ;
8) для каждого элемента x существует противоположный элемент − x такой, что x + (−x) = 0 .
Линейное пространство могут образовывать элементы любой природы. Например, совокупность матриц размером
m × n образует линейное пространство, поскольку для них определены правила суммы матриц и умножения матрицы на
действительное число, удовлетворяющие аксиомам 1-8. Также, например, линейное пространство образует множество всех
решений системы линейных однородных уравнений.
Легко доказать следующие утверждения:
• в каждом линейном пространстве существует только один нулевой вектор;
• для каждого элемента линейного пространства существует только один противоположный элемент;
• для каждого элемента x линейного пространства верно 0 ⋅ x = 0 .
Определение. n -мерным вектором называется упорядоченный набор n действительных чисел. Числа, составляющие
вектор, называются координатами или компонентами.
Вектор записывается в виде:
x = ( x1 , x2 , ... , xn ) ,
111
где x1 , x2 , ... , xn -координаты вектора.
В определении вектора при n = 2 или n = 3 совокупность чисел можно интерпретировать как совокупность координат
вектора на плоскости или в пространстве.
Определение. Два n -мерных вектора x = ( x1 , x2 , ... , xn ) и y = ( y1 , y 2 , ... , y n ) называются равными, если равны все
компоненты векторов, т.е. xi = yi , (i=1..n).
Определение. Суммой двух векторов x = ( x1 , x2 , ... , xn ) и y = ( y1 , y 2 , ... , y n ) называется вектор z=x+y, компоненты
которого равны zi = xi + yi , (i=1..n).
Определение. Произведением вектора x на действительное число λ называется вектор y = λx , компоненты
которого равны yi = λxi , (i=1..n).
Пусть роль нуля играет нулевой вектор
0 = (0,0,...,0) ,
а противоположного вектора для x = ( x1 , x2 , ... , xn ) - вектор
− x = (−1) ⋅ x = (− x1 , − x2 , ... , − xn ) .
Данные операции сложения векторов и умножения вектора на число удовлетворяют аксиомам (12.1), поэтому
совокупность n -мерных векторов образует линейное пространство. Множество n -мерных векторов называют также
линейным векторным пространством.
Определение. Линейной комбинацией векторов a1 , a 2 ,..., a k называется вектор вида
λ1a1 + λ2a 2 + ... + λk a k ,
где λ1 , λ2 ,..., λk -действительные числа, называемые коэффициентами линейной комбинации.
Определение. Линейная комбинация называется тривиальной, если все ее коэффициенты равны нулю, и называется
нетривиальной в противном случае.
Определение. Система векторов называется линейно зависимой, если существует нетривиальная линейная
комбинация этих векторов, равная нулевому вектору. В противном случае система векторов называется линейно
независимой.
Для линейно независимой системы векторов только ее тривиальная линейная комбинация равна нулевому вектору.
Система векторов, среди которых есть нулевой вектор, всегда линейно зависима.
Если часть векторов некоторой системы векторов является линейно зависимой, то и вся система векторов является
линейно зависимой.
112
Теорема. Система векторов (число векторов ≥2) линейно зависима тогда и только тогда, когда хотя бы один из системы
векторов является линейной комбинацией остальных.
Векторы можно рассматривать как матрицы-строки или как матрицы-столбцы, а строки и столбцы матрицы как
векторы.
Тогда вопрос о линейной зависимости некоторой системы векторов можно рассматривать как вопрос о линейной
зависимости строк или столбцов соответствующей матрицы, т.е. о ее ранге (см. тему 4).
Определение. Линейное пространство называется n -мерным, если в нем существует n линейно независимых
векторов, а любые из (n + 1) векторов уже являются зависимыми. Число n называется размерностью пространства.
Пример 12.1. Определить размерность множества векторов на плоскости.
◄
Рассмотрим произвольные два неколлинеарных вектора a = (a1 , a 2 ) и b = (b1 , b2 ) . Составим из компонент данных
a
a
a a2
. Ранг матрицы A равен двум, поскольку векторы a и b неколлинеарны и 1 ≠ 2 . Поэтому
векторов матрицу A = 1
b1 b2
b1 b2
строки матрицы A линейно независимы, следовательно, линейно независимы и векторы a , b . Следовательно, любые два
неколлинеарных вектора на плоскости линейно независимы. Рассмотрим три произвольных вектора a = (a1 , a 2 ) , b = (b1 , b2 ) и
a1 a 2
с = (с1 , с 2 ) . Матрица B = b1 b2 , составленная из компонент векторов a , b и с, имеет ранг не больший двух, т.е. строки
c1 c 2
матрицы B линейно зависимы и соответственно линейно зависимы и векторы a , b и с. Следовательно, размерность такого
линейного векторного пространства равна двум. ►
Определение. Совокупность n линейно независимых векторов n - мерного пространства называется базисом.
Пример 12.2. Показать, что n -мерные векторы x = ( x1 , x2 ,..., xn ) образуют n -мерное линейное пространство, базисом
которого может быть совокупность векторов e1 = (1;0;0;...0) , e 2 = (0;1;0;...0) ,….., e n = (0;0;0;...1) .
◄
Векторы e1 , e 2 ,...,.e n линейно независимы, поскольку ранг матрицы, составленной из компонент данных векторов равен
n:
113
1 0 ... 0
0 1 ... 0
rang
=n.
... ... ... ...
0
0
...
1
Любые (n + 1) n -мерных векторов являются линейно зависимыми. Следовательно, пространство n -мерных векторов
является n-мерным линейным пространством, и векторы e1 = (1;0;0;...0) , e 2 = (0;1;0;...0) ,….., e n = (0;0;0;...1) образуют базис.►
Теорема (основная теорема о базисе). Каждый вектор линейного пространства единственным образом может быть
представлен в виде линейной комбинации векторов базиса.
Пусть e1 , e 2 ,...,.e n образуют базис некоторого n-мерного линейного пространства V . Тогда, в силу основной теоремы,
вектор x ∈V можно единственным образом записать в виде:
x = x1e1 + x2e 2 + .... + xne n
Числа x1 , x2 ,..., xn называются координатами вектора x в базисе e1 , e 2 ,...,.e n .
Пусть e1 , e 2 ,..., e n и e1′ ,e ′2 ,...,e ′n – два базиса в n-мерном пространстве. Будем называть их старым и новым
соответственно. Пусть каждый вектор нового базиса можно выразить в виде линейной комбинации векторов старого базиса:
или
e1′ = t11e1 + t 21e 2 + ... + t n1e n
e′2 = t12e1 + t 22e 2 + ... + t n 2e n
e′ = t e + t e + ... + t e
nn n
2n 2
1n 1
n
(12.2)
(e1′
(12.3)
e′2 ... e′n ) = (e1 e 2 ... e n )T ,
где
114
t11 t12
t
t
T = 21 22
... ...
t n1 t n 2
... t1n
... t 2 n
... ... .
... t nn
(12.4)
Матрица T называется матрицей перехода от старого базиса к новому базису. Заметим, что коэффициенты
разложения новых базисных векторов по старому базису образуют столбцы матрицы перехода.
Из (12.3) следует, что матрица перехода от нового базиса к старому равна T −1 , т.е.:
(e1 , e 2 ,..., e n ) = (e1′ ,e′2 ,...,e′n )T −1
(12.5)
Пусть вектор x имеет координаты x1 , x 2 ,...., x n в старом базисе и координаты x1′ , x 2′ ,...., x n′ в новом базисе, т.е.
(12.6)
x = x1e1 + x 2 e 2 + ....x n e n = x1′e1′ + x 2′ e ′2 + ....x n′ e ′n
Подставляя e1′ , e ′2 ,..., e ′n из (12.2) или (12.3) в (12.6) и приравнивая коэффициенты при векторах e1 , e 2 ,..., e n получим:
x1 = x1′t11 + x2′ t12 + .... + xn′ t1n
x1
x1′
x = x′t + x′ t + .... + x′ t
x
x′
2
1 21
2 22
n 2n
или 2 = T 2 .
...............................................
xn = x1′t n1 + x2′ t n 2 + .... + xn′ t nn
xn
xn′
Из (12.7) следует
x1
x1′
′
x
2
−1 x 2
=
T
′
x
n
xn
(12.7)
(12.8)
Формулы (12.7) и (12.8) называются формулами преобразования координат.
Пример 12.3. Дан вектор x = −e1 + 6e 2 + e 3 . Разложить вектор x по новому базису e1′ = 3e 2 + e 3 , e ′2 = e1 + e 3 ,
e ′3 = e1 + 2e 2 ,.
115
◄
Запишем матрицу перехода:
0
T = 3
1
1
0
1
1
2 .
0
Далее находим T −1 :
T
−1
2/5
− 2 / 5 1/ 5
= 2 / 5 − 1/ 5 3 / 5 .
3/ 5
1 / 5 − 3 / 5
Для определения координат вектора x в новом базисе воспользуемся формулой (12.8)
2 / 5 − 1 2
x1 − 2 / 5 1 / 5
x1′
−1
x2′ = T x2 = 2 / 5 − 1 / 5 3 / 5 6 = − 1 .
x 3/ 5
x′
1 / 5 − 3 / 5 1 0
3
3
Следовательно, в новом базисе искомый вектор имеет вид x = 2e1′ − e ′2 .►
НАЧАЛО ТЕМЫ
СОДЕРЖАНИЕ
116
Тема 13. Евклидовы пространства.
Определение. Линейное векторное пространство V называется евклидовым, если любым двум векторам x и y из V
ставится в соответствие число, называемое скалярным произведением и обозначаемое как (x, y ) , причем выполняются
следующие условия:
1) (x, y ) = (y , x) ;
2) (x + y , z ) = (x, z ) + (y , z ) ;
3) (λ ⋅ x, y ) = λ ⋅ (x, y ), где λ -действительное число;
4) (x, x) > 0 , если x - ненулевой вектор; (x, x) = 0 , если x - нулевой вектор.
Определим скалярное произведение векторов x = ( x1 , x2 ,..., xn ) и y = ( y1 , y 2 ,..., y n ) формулой:
(12.9)
(x, y ) = x1 y1 + x2 y 2 + ... + xn y n .
Заметим, что рассмотренное ранее скалярное произведение геометрических векторов совпадает с (12.9) при n = 2 и
n = 3.
Пример 13.1. Найти скалярное произведение векторов x = (−3;1;0;2) и y = (2;−1;3;4) .
◄
(x, y ) = −3 ⋅ 2 + 1 ⋅ (−1) + 0 ⋅ 3 + 2 ⋅ 4 = 1 .►
Определение. Длиной (нормой) вектора x = ( x1 , x2 ,..., xn ) в евклидовом пространстве называется величина
x = ( x, x) = x12 + x22 + ... + xn2
Заметим, что в двух- или трехмерном евклидовом пространстве длина вектора имеет вполне определенный
геометрический смысл.
Свойства длин векторов:
1)
x = 0 тогда и только тогда, когда x = 0 ;
2)
λx = λ x , где λ - действительное число;
(12.10)
( x, y ) ≤ x y ;
4)
x+ y ≤ x + y.
Определение. Углом между ненулевыми векторами x и y евклидова пространства называется число ϕ ,
определяемое из равенства:
3)
117
(x, y )
, где 0 ≤ ϕ ≤ π .
(12.11)
x⋅y
(x, y )
Согласно третьему свойству длин векторов − 1 ≤
≤ 1 , т.е. действительно − 1 ≤ cos ϕ ≤ 1.
xy
Определение. Два вектора называются ортогональными, если их скалярное произведение равно нулю.
Определение. Вектор называется нормированным, если его длина равна единице.
Заметим, что для нормирования ненулевого вектора x достаточно умножить его на коэффициент 1 / x , где x - норма
cos ϕ =
исходного вектора. Пусть задан вектор x = (1;−2;2) . Его длина равна x = 12 + (−2) 2 + 2 2 = 3 . Нормированный вектор имеет
вид x′ = (1 / 3;−2 / 3;2 / 3) .
Определение. Система векторов называется ортонормированной, если вектора системы нормированы и попарно
ортогональны.
Теорема. Ортонормированная система векторов линейно независима.
Теорема. Во всяком n -мерном евклидовом пространстве существует ортонормированный базис.
Заметим, что ортонормированным базисом в n -мерном векторном пространстве является, например, система n
единичных векторов, у которых i -я компонента равна единице, а остальные компоненты равны нулю:
e1 = (1;0;...;0), e 2 = (0;1;...;0), … e n = (0;0;...;1) .
НАЧАЛО ТЕМЫ
СОДЕРЖАНИЕ
118
Тема 14. Линейные преобразования.
Пусть даны два линейных пространства: V n размерности n и V m размерности m .
Определение. Если задан закон (правило), по которому каждому вектору x пространства V n ставится в соответствие
~
единственный вектор y пространства V m , то говорят, что задан оператор A , действующий из V n в V m , и записывают
~
y = A ( x) .
Определение. Оператор называется линейным, если для любых векторов x и y пространства V n и любого
действительного числа λ выполняются соотношения:
~
~
~
1) A(x + y ) = A(x) + A(y )
~
2) A(λx) = λA(x)
~
Вектор y = A(x) называется образом вектора x , а сам вектор x - прообразом вектора y .
Определение. Линейный оператор, действующий из линейного пространства V n в линейное пространство V n , т.е.
отображающие n -мерное линейное пространство в себя, называют линейным преобразованием пространства V n .
Далее будем рассматривать только линейные преобразования.
~
~
Пусть в линейном пространстве V n с базисом e1 , e 2 ,..., e n задано линейное преобразование A . Тогда А(e1 ) ,
~
~
А(e 2 ) ,…, А(e n ) – тоже векторы пространства V n . Поэтому их можно единственным способом разложить по векторам базиса:
Или в матричном виде
где
~
A(e1 ) = а11e1 + а21e 2 + ... + аn1e n
~
A(e 2 ) = а12e1 + а22e 2 + ... + аn 2e n
~
A
(e n ) = а1n e1 + а2 n e 2 + ... + аnn e n
(14.1)
~
~
~
( A(e1 ) A(e 2 ) ... A(e n )) = (e1 e 2 ... e n ) A ,
(14.2)
119
а11 а12 а1n
а
a
a
22
2n
A = 21
(14.3)
an1 an 2 ann
~
~
Матрица A называется матрицей преобразования A в базисе e1 , e 2 ,..., e n , а ее rang ( A) - рангом преобразования A .
Таким образом, каждому линейному преобразованию соответствует матрица в данном базисе. Верно и обратное:
всякой матрице n -го порядка соответствует линейное преобразование n -мерного пространства с заданным базисом.
Произвольный вектор x ∈V n относительно базиса e1 , e 2 ,..., e n имеет вид:
x1
x
(14.4)
x = x1e1 + x 2 e 2 + ....x n e n или x = (e1 e 2 ... e n ) 2 .
xn
~
Подействуем на вектор x преобразованием A , в результате получим вектор y :
~
~
~
~
~
y = A(x) = A( x1e1 + x2e 2 + ....xn e n ) = x1 A(e1 ) + x2 A(e 2 ) + ....xn A(e n )
Или в матричном виде
x1
x1
~
~
~
~
x2
x
(14.5)
y = A(x) = A(e1 ) A(e 2 ) ... A(e n ) = (e1 e 2 ... e n ) A 2 .
x
n
xn
(
)
Вектор y также может быть разложен по заданному базису e1 , e 2 ,..., e n :
120
y1
y
(14.6)
y = y1e1 + y 2e 2 + .... y n e n или y = (e1 e 2 ... e n ) 2 .
yn
Разложение вектора y по базису единственно, поэтому из (14.5),(14.6) получаем:
y1 а11 а12 а1n x1
y 2 а 21 a 22 a 2 n x 2
(14.7)
=
y
a
a
a
n2
nn x n
n n1
Таким образом, результатом действия линейного преобразования с матрицей An×n на некоторый n -мерный вектор
является n - мерный вектор, столбец координат которого можно получить умножением матрицы преобразования на столбец
координат исходного вектора.
3 2 1
~
Пример 14.1. Пусть в пространстве V 3 линейный оператор A задан матрицей A = − 1 2 1 в базисе e1 , e 2 , e 3 .
0 4 − 2
~
Найти образ y = A(x) вектора x = 3e1 − 2e 2 + e 3 .
◄
По формуле (14.7) имеем
y1 3 2 1 3 6
y 2 = − 1 2 1 − 2 = − 6 .
y 0 4 − 2 1 − 10
3
Поэтому, y = 6e1 − 6e 2 − 10e 3 .►
~
Теорема. Матрицы A и A′ линейного оператора A в старом базисе e1 , e 2 ,..., e n и новом базисе e1′ ,e ′2 ,...,e ′n связаны
соотношением
(14.8)
A′ = T −1 AT ,
121
где T -матрица перехода от старого базиса к новому.
Студентам предлагается доказать эту теорему самостоятельно.
1 1 3
~
Пример 14.2. Пусть в пространстве V 3 линейное преобразование A задано матрицей A = 2 − 1 3 в базисе e1 , e 2 , e 3 .
1 − 1 3
Найти матрицу преобразования в новом базисе e1′ ,e ′2 ,e ′3 , связанном со старым базисом матрицей перехода
1
1 1
T = 2 − 1 − 1
2 3
4
◄
Найдем матрицу, обратную матрице перехода
1/ 3
0
1/ 3
T −1 = 10 / 3 − 2 / 3 − 1 .
− 8 / 3 1/ 3
1
Матрица линейного преобразования в новом базисе имеет вид
1/ 3
0 1 1 3 1 1 1 5
7
9
1/ 3
−1
A′ = T AT = 10 / 3 − 2 / 3 − 1 2 − 1 3 2 − 1 − 1 = 21 11 16 .►
− 8 / 3 1/ 3
1 1 − 1 3 2 3 4 − 17 − 9 − 13
~
Определение. Вектор x называется собственным вектором линейного преобразования A , если найдется такое число
λ , что
~
(14.9)
А ( x ) = λx .
~
Число λ называется собственным числом линейного преобразования A (матрицы A ), соответствующим вектору x .
Из определения следует, что среди векторов линейного пространства выделяют собственные векторы, которые под
действием линейного преобразования переходят в векторы, коллинеарные самим себе.
Запишем равенство (14.9) в матричной форме:
122
AX = λX
или
( A − λE ) X = 0 ,
(14.10)
где X = ( x1 x2 ... xn )T -матрица-столбец из координат вектора x . Полученная однородная система всегда имеет тривиальное
решение x = 0 . Для существования нетривиального решения необходимо и достаточно, чтобы определитель системы (14.10)
равнялся нулю:
(14.11)
A − λE = 0 .
а
~
Например, для линейного преобразования A с матрицей A = 11
а 21
уравнения
а11 − λ
а21
а12
=0.
а22 − λ
а12
собственными числами служат корни λ1 и λ 2
а 22
(14.12)
Уравнение (14.11) называется характеристическим уравнением, а его левая часть – характеристическим
многочленом линейного преобразования, заданного матрицей A . Подстановка собственного числа в равенство (14.10) дает
систему уравнений для нахождения координат соответствующего собственного вектора.
~
Пример 14.3. Найти собственные числа и собственные векторы линейного преобразования A , заданного матрицей
5 4
.
A =
8 9
◄
В данном примере характеристическое уравнение (14.12) имеет вид:
5−λ
4
= (5 − λ )(9 − λ ) − 32 = 0 , т.е. λ 2 − 14λ + 13 = 0 .
8
9−λ
~
Решая полученное характеристическое уравнение, определяем собственные числа преобразования A λ1 = 1 и λ2 = 13.
Далее находим собственный вектор x1 = ( x1 , x2 ) , соответствующий λ1 = 1 . Для этого составляем матричное уравнение
(14.10):
4 x1 + 4 x 2 = 0
5 − 1 4 x1 0
= ,
,
9 − 1 x 2 0
8
8 x1 + 8 x 2 = 0
123
решение которого x 2 = − x1 . Поэтому векторы x1 = (c1 ;−c1 ) для любого с1 ≠ 0 являются собственными векторами
~
преобразования A с собственным значением λ1 = 1 .
Аналогично находим собственный вектор x 2 = ( x1 , x2 ) для λ 2 = 13 . Соответствующее матричное уравнение имеет вид:
4 x1 0
− 8 x1 + 4 x 2 = 0
5 − 13
=
,
.
9 − 13 x 2 0
8
8 x1 − 4 x 2 = 0
~
Отсюда векторы x 2 = (c2 ;2c2 ) для любого с 2 ≠ 0 являются собственными векторами преобразования A с собственным
значением λ 2 = 13 .►
Теорема. Характеристический многочлен преобразования в V n не зависит от выбора базиса в V n .
Теорема. Собственные векторы x1 , x 2 ,..., x n преобразования, отвечающие различным значениям собственных чисел
λ1 , λ 2 ,..., λ n линейно независимы.
~
Теорема. Пусть линейное преобразование A , действующее в V n , имеет n различных собственных значений
λ1 , λ 2 ,..., λ n , Матрица данного линейного оператора имеет диагональный вид (причем на ее диагонали расположены
~
~
собственные числа оператора A ) тогда и только тогда, когда базис образован собственными векторами A .
− 4 7 13
~
Пример 14.4. Пусть в пространстве V 3 линейное преобразование A задано матрицей A = − 7 6 11 в некотором
3 − 1 − 2
базисе. Найти новый базис, в котором матрица преобразования имеет диагональный вид.
~
◄
Составим характеристическое уравнение преобразования A :
7
13
− 4 − λ
3
−
λ
11
7
6
−
= −λ + 7λ − 6 = −(λ − 1)(λ − 2)(λ + 3).
3
− 1 − 2 − λ
Следовательно, собственные значения равны λ1 = 1, λ 2 = 2, λ3 = −3 . Полученные собственные значения различны,
поэтому в качестве базиса (в силу теоремы выше) нужно взять собственные вектора данного оператора.
Решая систему
124
Решая систему
Решая систему
13 x1 − 5 7 13 x1 0
− 4 −1 7
6 −1
11 x 2 = − 7 5 11 x 2 = 0 ,
−7
3
− 1 − 2 − 1 x3 3 − 1 − 3 x3 0
находим собственный вектор x1 = (c1 ;−3c1 ;2c1 ) , соответствующий λ1 = 1 .
7
13 x1 − 6 7 13 x1 0
− 4 − 2
−
7
6
−
2
11
x
=
−
7
4
11
2
x 2 = 0 ,
3
− 1 − 2 − 2 x3 3 − 1 − 4 x3 0
находим собственный вектор x 2 = (c2 ;−c2 ; c2 ) , соответствующий λ 2 = 2 .
7
13 x1 − 1 7 13 x1 0
− 4 + 3
6+3
11 x 2 = − 7 9 11 x 2 = 0 ,
−7
3
− 1 − 2 + 3 x3 3 − 1 1 x3 0
находим собственный вектор x 3 = (−c3 ;−2c3 ; c3 ) , соответствующий λ3 = −3 .
~
Поэтому в базисе, например, x1 = (1;−3;2) , x 2 = (1;−1;1) , x 3 = (−1;−2;1) , матрица оператора A примет вид
1 0 0
A′ = 0 2 0 .
0 0 − 3
Действительно, матрица перехода от старого базиса к новому и обратная для нее имеют вид
1 −1
1
1 − 2 − 3
T = − 3 − 1 − 2 ,
T −1 = − 1 3
5 .
2
−1 1
1
1
2
В силу (14.8)
125
1 −1 1 0 0
1 − 2 − 3 − 4 7 13 1
A′ = T −1 AT = − 1 3
5 − 7 6 11 − 3 − 1 − 2 = 0 2 0 .
−1 1
2 3 − 1 − 2 2
1
1 0 0 − 3
Как видим, получили ту же самую диагональную матрицу, на главной диагонали которой находятся собственные
значения матрицы A .►
~
Определение. Линейное преобразование A в евклидовом пространстве V n называется симметрическим, если для
любых векторов x и y из V n выполняется равенство
~
~
( A(x), y ) = (x, A(y )) .
Заметим, что символ симметрического оператора при скалярном умножении можно переносить с одного множителя на
другой.
Теорема. Для того, чтобы линейное преобразование было симметрическим, необходимо и достаточно, чтобы его
матрица в ортонормированном базисе была симметрична.
Теорема. Собственные векторы симметрического линейного преобразования, соответствующие различным
собственным числам, взаимно ортогональны.
Теорема. Характеристическое уравнение симметрического преобразования имеет только действительные корни.
Теорема. В евклидовом пространстве для симметрического преобразования существует ортонормированный базис,
состоящий из собственных векторов этого преобразования, в котором матрица преобразования диагональная, а по диагонали
стоят собственные числа.
~
Пример 14.5. Пусть в пространстве V 3 симметрическое линейное преобразование A задано матрицей
− 6 2 0
A = 2 − 3 0 в некотором базисе. Найти ортонормированный базис, в котором матрица преобразования имеет
0
0 4
диагональный вид, и соответствующую матрицу перехода.
◄
~
Составим характеристическое уравнение симметрического преобразования A :
126
−6−λ
2
0
2
−3−λ
0
0
0 = (4 − λ ){(6 + λ )(3 + λ ) − 4} = (4 − λ )(λ2 + 9λ + 14)
4−λ
Собственными числами являются λ1 = 4, λ2 = −7, λ3 = −2 .
Собственный вектор x1 = ( x1 , x2 , x3 ) , соответствующий собственному числу λ1 = 4 определяется из матричного
уравнения:
− 10 2 0 x1 0
2
7
0
−
x2 = 0 ,
0
0 0 x3 0
которое соответствует линейной системе
− 10 x1 + 2 x2 = 0
2 x1 − 7 x2 = 0 .
0=0
Следовательно, x1 = (0;0; c1 ) .
Собственный вектор x 2 = ( x1 , x2 , x3 ) , соответствующий собственному числу λ2 = −7 определяется из матричного
уравнения:
1 2 0 x1 0
2
4
0
x2 = 0 ,
0 0 11 x 0
3
которое соответствует линейной системе
x1 + 2 x2 = 0
2 x1 + 4 x2 = 0 .
11x = 0
3
127
Следовательно, x 2 = (−2c2 ; c2 ;0) .
Собственный вектор x 3 = ( x1 , x2 , x3 ) , соответствующий собственному числу λ3 = −2 определяется из матричного
уравнения:
− 4 2 0 x1 0
2 − 1 0 x2 = 0 ,
0
0 6 x3 0
которое соответствует линейной системе
− 4 x1 + 2 x2 = 0
2 x1 − x2 = 0 .
6 x3 = 0
Следовательно, x 3 = (c3 ;2c3 ;0)T .
Пусть c1 = c2 = с3 = 1 . Тогда получаем попарно ортогональные собственные векторы
0
x1 = 0
1
− 2
x2 = 1
0
1
x3 = 2 .
0
которые образуют ортогональный базис. Нормируем базисные векторы, разделив каждую координату на длину вектора.
Получим ортонормированный базис
0
x′1 = 0
1
− 2/ 5
x′2 = 1 / 5
0
1/ 5
x′3 = 2 / 5 .
0
В данном базисе матрица преобразования примет диагональный вид
128
0
4 0
A′ = 0 − 7 0 ,
0 0 − 2
а матрицей перехода является матрица, построенная на ортонормированных собственных векторах:
0 − 2 / 5 1/ 5
T = 0 1/ 5 2 / 5 .
0
0
1
НАЧАЛО ТЕМЫ
СОДЕРЖАНИЕ
129
Тема 15. Квадратичные формы.
Определение. Квадратичной формой L( x1 , x 2 ,..., x n ) от n переменных называется сумма, каждый член которой
является либо квадратом одной из переменных, либо произведением двух разных переменных, взятых с некоторым
коэффициентом.
Введем следующие обозначения для коэффициентов квадратичной формы: коэффициент при x i2 обозначим через a ii , а
коэффициент при x i x j , i ≠ j - через 2a ij . Поскольку x i x j = x j x i , то a ij = a ji . Тогда квадратичная форма примет вид:
n
n
L( x1 , x 2 ,..., x n ) = ∑ ∑ a ij x i x j , где a ij = a ji .
i =1 j =1
Квадратичную форму можно записать в матричном виде:
L( x1 , x 2 ,..., x n ) = ( x1
или
x2
a11
a
... x n ) 21
...
a n1
a12
a 22
...
an2
... a1n x1
... a 2 n x 2
... ... ...
... a nn x n
L( x1 , x 2 ,..., x n ) = X T AX ,
a11 a12 ... a1n
a
a
...
a
T
22
2n
где X = ( x1 x 2 ... x n ) -матрица-столбец переменных, A = 21
-матрица квадратичной формы.
...
... ... ...
a
a
...
a
n2
nn
n1
Заметим, что в силу равенства a ij = a ji , матрица квадратичной формы - симметричная.
Матрице столбцу X можно поставить в соответствие вектор x с координатами x1 , x2 ,..., xn в некотором базисе. Тогда
квадратичная форма является способом задания числовой функции векторного аргумента x .
Пример 15.1. Написать матричный вид квадратичной формы L( x1 , x 2 , x 3 ) = x12 + 5 x 22 − 4 x 32 + 6 x1 x 2 − 4 x 2 x 3 .
130
◄
Диагональные элементы матрицы квадратичной формы равны коэффициентам при квадратах переменных, значит
a11 = 1, a 22 = 5, a 33 = −4 . Другие элементы – половинам соответствующих коэффициентов квадратичной формы, значит
a12 = a 21 = 6 / 2 = 3 , a 23 = a 32 = −4 / 2 = −2 , a13 = a 31 = 0 / 2 = 0 . Следовательно, искомая матрица имеет вид:
0
1 3
A = 3 5 − 2 .►
0 − 2 − 4
~
Теорема. Пусть в евклидовом пространстве матрицы симметрического линейного оператора A и квадратичной формы
L , заданные в ортонормированном базисе, совпадают. Тогда квадратичная форма связана с оператором формулой:
~
(15.1)
L(x) = ( A(x), x)
Заметим, что квадратичной форме с матрицей A можно сопоставить симметрическое линейное преобразование также с
матрицей A , заданное в ортонормированном базисе.
Определение. Квадратную матрицу U называют ортогональной, если она удовлетворяет условию
U T ⋅U = E ,
где E -единичная матрица.
Свойства ортогональных матриц:
1) U = 1 ;
2) U −1 = U T ;
3) U T ⋅ U = E .
cos ϕ − sin ϕ
.
Ортогональной, например, является матрица
sin
cos
ϕ
ϕ
Теорема. В евклидовом пространстве матрица перехода от одного ортонормированного базиса к другому является
ортогональной. Любая ортогональная матрица осуществляет переход от одного ортонормированного базиса в другой
ортонормированный базис.
Теорема. Пусть линейное преобразование, переводящее вектор y в вектор x задано с помощью невырожденной
матрицы T . Тогда матрицы A и A′ квадратичных форм L(x) и L(y ) соответственно при линейном преобразовании векторов
связаны соотношениями:
131
A′ = T T AT ,
A = (T −1 )T A′T −1 .
(15.2)
Пример 15.2. Найти матрицу квадратичной формы L(x) = x12 − 4 x 22 + 6 x1 x 2 при линейном преобразовании векторов
x1 = − y1 + 2 y 2 , x2 = 3 y1 − 5 y 2 .
−1 2
. Матрица квадратичной формы
◄
Матрица линейного преобразования векторов имеет вид T =
3 − 5
1 3
. Матрицу искомой квадратичной формы находим из (15.2):
L(x) = x12 − 4 x 22 + 6 x1 x 2 имеет вид A =
3 − 4
91
− 1 3 1 3 − 1 2 − 53
,
=
A′ = T T AT =
−
−
−
−
91
156
5
3
4
3
5
2
2
2
а сама квадратичная форма имеет вид L(y ) = −53 y1 − 156 y 2 + 182 y1 y 2 .►
n
n
Определение. Квадратичная форма L( x1 , x 2 ,..., x n ) = ∑ ∑ a ij x i x j называется канонической, если ее коэффициенты a ij
i =1 j =1
при i ≠ j равны нулю:
L( x1 , x 2 ,..., x n ) = a11 x12 + a 22 x 22 + ... + a nn x n2
Заметим, что матрица канонической квадратичной формы является диагональной.
Теорема. Любая квадратичная форма может быть приведена к каноническому виду.
~
Любой квадратичной форме L можно сопоставить симметрическое линейное преобразование A . Тогда задачу о
приведении квадратичной формы к каноническому виду можно свести к задаче о приведении к диагональной форме матрицы
~
преобразования A .
Пример 15.3. Квадратичную форму L(x) = −5 x12 − 8 x 22 + 4 x1 x 2 привести к каноническому виду.
~
◄
Введем симметричный оператор A , матрицу которого примем равной матрице квадратичной формы
− 5 2
.
A =
2 − 8
Составим характеристическое уравнение
132
−5−λ
2
= λ2 + 13λ + 36 = 0
−8−λ
2
Собственные значения равны λ1 = −4 , λ 2 = −9 . Соответствующие собственные векторы x1′ = (2c1 ; c1 ) и x′2 = (c2 ;−2c2 ) .
Заметим, что данные векторы ортогональны: (x1′ , x ′2 ) = 2c1c 2 + c1 (−2c 2 ) = 0 . Ортонормированными являются векторы
x1′ = (2 / 5;1 / 5 ) , x ′2 = (1 / 5;−2 / 5 ) . В данном базисе исходная квадратичная форма имеет канонический вид
L(x ′) = −4 x1′ 2 − 9 x 2′ 2
Выполним проверочные действия. Действительно,
2
L(x ′) = −4 x1′ −
2
9 x 2′ 2
2
1
2
2
1
x1 +
x 2 − 9
x1 −
x2 =
= −4
5
5
5
5
= −5 x12 − 8 x 22 + 4 x1 x 2 . ►
Заметим, что при изменении базиса матрицы симметричного линейного преобразования ( A′ = T −1 AT , см. 14.8) и
квадратичной формы ( A′ = T T AT , см 15.2) преобразуются по разным законам. Заметим, что если матрица T осуществляет
переход от ортонормированного базиса к ортонормированному, то T -ортогональная матрица ( T −1 = T T ), так что в данном
случае законы преобразования совпадают.
Канонический вид квадратичной формы не является однозначно определенным. Например, в примере 15.3 возможен
следующий способ решения, путем выделения полного квадрата при переменной x 2 .
L(x) = −5 x12 − 8 x 22 + 4 x1 x 2 =
1
1
2
= −5 x12 − 2 x12 − 2 x1 x 2 + 4 x 22 + x12 = −4.5 x12 − 2(0.5 x1 − 2 x 2 ) .
4
2
В этом случае базис уже не будет являться ортонормированным. Но канонические квадратичные формы, полученные
разными способами, будут обладать некоторыми общими свойствами.
Теорема (закон инерции квадратичных форм). Число положительных, отрицательных и нулевых коэффициентов
при квадратах переменных канонической квадратичной формы не зависит от способа приведения квадратичной формы к
этому виду.
Теорема. Ранг матрицы квадратичной формы равен числу отличных от нуля коэффициентов канонической
квадратичной формы и не изменяется при линейных преобразованиях.
133
Определение. Квадратичная форма называется положительно (отрицательно) определенной, если при всех
значениях переменных, из которых хотя бы одно отлично от нуля,
L( x1 , x 2 ,..., x n ) > 0
( L( x1 , x 2 ,..., x n ) < 0)
Положительно определённые и отрицательно определённые формы называются знакоопределёнными. В противном
случае квадратичные формы являются знакопеременными.
Теорема. Для того чтобы квадратичная форма была положительно (отрицательно) определенной, необходимо и
достаточно, чтобы все собственные числа матрицы квадратичной формы были положительными (отрицательными).
Определение. Главным минором ∆ k порядка k (1 ≤ k ≤ n) квадратной матрицы An×n = (aij ) называется определитель
a11 a12 ... a1k
a
a22 ... a2 k
.
∆ k = 21
... ... ... ...
ak1 ak 2 ... akk
Теорема (критерий Сильвестра). Для того чтобы квадратичная форма была положительно (отрицательно)
определенной, необходимо и достаточно, чтобы все ее главные миноры были положительны (чередовали знаки, начиная с
отрицательного).
Пример 15.4. Доказать, что квадратичная форма L = 9 x12 + 5 x 22 + 12 x32 − 4 x1 x 2 − 10 x1 x3 + 2 x 2 x3 является положительно
определенной.
◄ Способ №1. Матрица квадратичной формы имеет вид
9 − 2 − 5
A = − 2 5
1 .
− 5 1 12
Составим характеристическое уравнение для данной матрицы
9−λ −2
−5
λ3 − 26λ2 + 183λ − 378 = 0 .
−2 5−λ
1 =0
−5
1
12 − λ
134
Решая уравнение, находим λ1 = 6, λ2 = 10 + 37 , λ3 = 10 − 37 . Все корни характеристического уравнения положительны,
следовательно, на основании теоремы исходная квадратичная форма является положительно определенной.
Способ №2. Найдем главные миноры матрицы квадратичной формы:
9 −2 −5
9 −2
∆1 = 9 = 9 > 0, ∆ 2 =
= 41 > 0, − 2 5
1 = 378 > 0 .
−2 5
− 5 1 12
Все главные миноры положительны. Следовательно, данная квадратичная форма является положительно определенной ►
НАЧАЛО ТЕМЫ
СОДЕРЖАНИЕ
135
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Алгебраическое дополнение
Базис пространства
Базисные столбцы
Базисные строки
Гипербола(ы)
асимптота
вершина
действительная ось
действительная полуось
мнимая ось
мнимая полуось
каноническое уравнение
сопряженная
центр
фокус
прямоугольник
ось
Вектор(ы)
нормали прямой
нормали плоскости
нормированный
длина
единичный
коллинеарные
компланарные
координаты
направляющий
нормальный
нулевой
ортогональные
противоположный
Вектор(ы) n-мерный(е)
координаты
образ
ортогональные
прообраз
Деление отрезка в заданном
отношении
Квадратичная_форма
знакоопределенная
знакопеременная
каноническая
отрицательно определенная
положительно определенная
Координатная ось
Координаты точки
Кривая второго порядка
Комбинация векторов
линейная
нетривиальная
тривиальная
Комбинация матриц
линейная
нетривиальная
тривиальная
Матрица(ы)
вырожденная
диагональная
единичная
квадратичной формы
квадратная
главная диагональ
побочная диагональ
невырожденная
нулевая
ортогональная
перестановочные
перехода
преобразования
присоединенная
прямоугольная
размер
расширенная
скалярная
столбец
строка
ступенчатая
транспонирование
треугольная
эквивалентные
элементарные преобразования
элементы
Метод
Гаусса
Крамера
обратной матрицы
Минор
базисный
главный
элемента определителя
Начало координат
Обратная_матрица
алгоритм
вычисления
с
помощью
присоединенной
матрицы
алгоритм
вычисления
с
помощью
элементарных
преобразований
Окружность
каноническое уравнение
нормальное уравнение
радиус
центр
Оператор
линейный
Определитель
свойства
Орт
Парабола
вершина
директриса
каноническое уравнение
ось
фокус
Переменные
базисные
неосновные
основные
свободные
Полупространство
отрицательное
положительное
Полуплоскость
отрицательная
положительная
Правило
Саррюса
треугольников
Преобразование
линейное
симметрическое
Произведение
вектора на число
матриц
матрицы на число
n-мерного вектора на число
Произведение векторов
векторное
скалярное
смешанное
Пространство
евклидово
линейное
линейное векторное
Пучок плоскостей
Пучок прямых на плоскости
Размерность пространства
Ранг
матрицы
преобразования
Решение системы линейных
уравнений
общее неопределенной системы
Связка плоскостей
Система векторов
линейно зависимая
линейно независимая
ортонормированная
Система координат
декартова
ортогональная
ортонормированная
прямоугольная
Система линейных уравнений
неоднородная
неопределенная
несовместная
однородная
определенная
решение
совместная
эквивалентные
Система матриц
линейно зависимая
линейно независимая
137
Собственное число
Собственный вектор
Сумма
векторов на плоскости и в
пространстве
матриц
n-мерных векторов
Теорема
закон инерции квадратичных
форм
критерий Сильвестра
Кронекера-Капелли
Лапласа
о ступенчатой матрице
основная о ранге матрицы
основная о базисе
Тройка векторов
левая
правая
Угол между векторами
Уравнение линии на плоскости
Уравнение плоскости в пространстве
нормированное
общее
проходящей через три точки
Уравнение прямой на плоскости
в отрезках
каноническое
нормированное
общее
с угловым коэффициентом
параметрические
Уравнение(я) прямой в пространстве
каноническое
общее
параметрические
Фундаментальная система решений
Характеристический многочлен
Характеристическое уравнение
Эллипс
каноническое уравнение
оси
оси симметрии
полуось
фокус
центр
эксцентриситет
СОДЕРЖАНИЕ
138
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Виды матриц. Линейные действия над матрицами. Транспонирование матриц.
2. Умножение матриц.
3. Определитель матрицы первого, второго, третьего порядка.
4. Миноры и алгебраические дополнения элементов определителя матрицы. Теорема Лапласа.
5. Свойства определителей.
6. Обратная матрица. Теорема существования и единственности обратной матрицы.
7. Элементарные преобразования матрицы. Эквивалентные матрицы.
8. Миноры произвольного порядка. Ранг матрицы. Базисный минор.
9. Свойства ранга матрицы. Ранг матрицы при элементарных преобразованиях.
10. Линейные комбинации строк и столбцов. Линейная зависимость и независимость строк (столбцов) матрицы.
11. Теорема о базисном миноре. Теорема о ранге матрицы.
12. Совместные, несовместные, определенные и неопределенные системы ЛУ. Эквивалентные системы ЛУ. Матричная
запись систем ЛУ. Расширенная матрица.
13. Метод обратной матрицы решения систем линейных уравнений.
14. Формулы Крамера.
15. Метод Гаусса.
16.Теорема Кронекера-Капелли.
17.Однородные и неоднородные системы. Свойства однородной системы ЛУ и ее решений.
18.Фундаментальная система решений. Теорема о решениях однородной системы уравнений.
19. Частное и общее решение неоднородной системы. Структура общего решения произвольной системы линейных
алгебраических уравнений.
20. Понятие вектора на плоскости и в пространстве. Коллинеарность и компланарность векторов. Линейные действия над
векторами и их свойства.
21.Скалярное произведение векторов: определения, свойства, выражение произведения через координаты векторов.
22.Векторное произведение векторов: определения, свойства, выражение произведения через координаты векторов.
23.Смешанное произведение векторов: определения, свойства, выражение произведения через координаты векторов.
24. Общее уравнение прямой на плоскости. Расстояние от точки до прямой.
25. Параметрические и каноническое уравнения прямой на плоскости.
26. Угол между двумя прямыми на плоскости.
27. Алгебраический критерий расположения прямых на плоскости.
28. Кривые второго порядка. Окружность.
29. Эллипс.
30. Гипербола.
31. Парабола.
32. Общее уравнение плоскости в пространстве. Расстояние от точки до плоскости.
33. Уравнение плоскости в пространстве, проходящей через три заданные точки.
34. Параметрические и каноническое уравнения прямой в пространстве.
35. Общее уравнение прямой в пространстве.
36. Алгебраические критерии взаимного расположения двух плоскостей в пространстве.
37. Алгебраические критерии взаимного расположения прямой и плоскости в пространстве.
38. Линейные действия над n-мерными векторами.
39. Векторное пространство.
40. Размерность и базис векторного пространства.
41. Линейные операторы. Собственные векторы и собственные значения линейного оператора.
42. Квадратичные формы.
140
ЛИТЕРАТУРА
Основная литература
1. Малугин В.А. Математика для экономистов: Линейная алгебра. – М.: Эксмо, 2006. -224 с.
2. Высшая математика для экономических специальностей: учебник и практикум/ под ред. проф. Н.Ш.Кремера. – М.:
Высшее образование, 2008.-893 с.
Дополнительная литература
1. Беклемишев Д.В. Курс аналитической геометрии и линейной алгебры – М.: Физматлит, 2009.- 312 с.
2. Данко П.Е., Попов А.Г., Кожевникова Т.Я. Высшая математика в упражнениях и задачах – М.: Оникс 21 век. , 2008. –
816 с.
3. Ильин В.А., Позняк Э.Г. Аналитическая геометрия. – М.: ФИЗМАТЛИТ, 2009 г, - 223 с.
4. Ильин В.А., Позняк Э.Г. Линейная алгебра. – М.: ФИЗМАТЛИТ, 2010 г, - 280 с.
5. Красс М.С., Чупрынов Б.П. Математика для экономистов. - СПб.: Питер, 2005. — 464 с.
6. Клетеник Д.В. Сборник задач по аналитической геометрии.. - СПб: Лань, 2010.-224с.
7. Соболь Б.В., Мишняков Н.Т., Поркшеян В.М. Практикум по высшей математике. –Ростов н/Д: Феникс, 2006.- 640с.
СОДЕРЖАНИЕ
141
ИНТЕРНЕТ-РЕСУРСЫ
1. http://www.exponenta.ru/educat/class/courses/student/la/examples.asp- примеры решения задач по линейной алгебре
2. http://www.exponenta.ru/educat/class/courses/student/an/examples.asp- примеры решения задач по аналитической
геометрии
3. http://a-geometry.narod.ru/- решения всех задач из книги: Клетеник Д.В. Сборник задач по аналитической геометрии.М.:Наука, 1980.-240с.4. http://www.pm298.ru/menu.php - справочник математических формул по высшей математике
5. http://www.pm298.ru/reshenie/menu.php - примеры решения задач по высшей математике
СОДЕРЖАНИЕ
142