МИНИСТЕРСТВО ВЫСШЕГО И СРЕДНЕГО СПЕЦИАЛЬНОГО
ОБРАЗОВАНИЯ РЕСПУБЛИКИ УЗБЕКИСТАН
ФЕРГАНСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
Кафедра «Электроника и приборостроение»
ТЕКСТЫ ЛЕКЦИЙ
по дисциплине “ТЕОРИЯ СПЕЦИАЛЬНЫХ СИСТЕМ УПРАВЛЕНИЯ”
Фергана – 2022
МИНИСТЕРСТВО ВЫСШЕГО И СРЕДНЕГО СПЕЦИАЛЬНОГО
ОБРАЗОВАНИЯ РЕСПУБЛИКИ УЗБЕКИСТАН
ФЕРГАНСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
Кафедра «Электроника и приборостроение»
ТЕКСТЫ ЛЕКЦИЙ
по дисциплине “ТЕОРИЯ СПЕЦИАЛЬНЫХ СИСТЕМ УПРАВЛЕНИЯ”
утверждено Учебно-методическим советом ФерПИ
“_____” _________2022 г.
Фергана – 2022
Тексты лекций предназначен на студентов специальности 60711400 «Автоматизация и управление технологическими процессами и
производством» и соответствует новым государственным стандартам
образования и рабочим программам.
Курс охватывает широкий спектр информации, которая понадобится
студентам для прохождения практического курса автоматизации
технологических процессов.
Тексты лекций был рассмотрен на заседании кафедры
Протокол № _____ от _________________ 20____ гг.
Методическое указание рассмотрено и утверждено
методическим советом Ферганского политехнического института.
Составитель:
Учебно-
Ощепкова Э.А. ассистент
1-Лекция
Понятие управления. Принципы построения систем управления. Примеры систем
автоматического управления.
План:
1. Система автоматического управления (САУ)
2. Теория автоматического управления (ТАУ)
3. Пример системы регулирования температуры. Функциональная и блок схемы
Автоматическое управление в технике - совокупность действий, направленных на
поддержание или улучшение функционирования управляемого объекта без
непосредственного участия человека в соответствии с заданной целью управления. АУ
широко применяется во многих технических и биотехнических системах для выполнения
операций, не осуществимых человеком в связи с необходимостью переработки большого
количества информации в ограниченное время, для повышения производительности труда,
качества и точности регулирования, освобождения человека от управления системами,
функционирующими в условиях относительной недоступности или опасных для
здоровья. Цель управления тем или иным образом связывается с изменением во времени
регулируемой (управляемой) величины — выходной величины управляемого объекта. Для
осуществления цели управления, с учётом особенностей управляемых объектов различной
природы и специфики отдельных классов систем, организуется воздействие на
управляющие органы объекта — управляющее воздействие. Оно предназначено также для
компенсации эффекта внешних возмущающих воздействий, стремящихся нарушить
требуемое поведение регулируемой величины. Управляющее воздействие вырабатывается
устройством управления (УУ). Совокупность взаимодействующих управляющего
устройства и управляемого объекта образует систему автоматического управления.
Система автоматического управления (САУ) поддерживает или улучшает
функционирование управляемого объекта. В ряде случаев вспомогательные для САУ
операции (пуск, остановка, контроль, наладка и т.д.) также могут быть автоматизированы.
САУ функционирует в основном в составе производственного или какого-либо другого
комплекса.
САУ классифицируются в основном по цели управления, типу контура управления
и способу передачи сигналов. Первоначально перед САУ ставились задачи поддержания
определённых законов изменения во времени управляемых величин. В этом классе систем
различают системы автоматического регулирования (CAP), в задачу которых входит
сохранение постоянными значения управляемой величины; системы программного
управления, где управляемая величина изменяется по заданной программе; следящие
системы, для которых программа управления заранее неизвестна.
Способ компенсации возмущений связан с типом контура управления системы. В
разомкнутых САУ на УУ не поступают сигналы, несущие информацию о текущем
состоянии управляемого объекта, либо в них измеряются и компенсируются главные из
возмущений, либо управление ведётся по жёсткой программе, без анализа каких-либо
факторов в процессе работы. Основной тип САУ — замкнутые, в которых осуществляется
регулирование по отклонению, а цепь прохождения сигналов образует замкнутый контур,
включающий объект управления и УУ; отклонения управляемой величины от желаемых
значений компенсируются воздействием через обратную связь, вне зависимости от причин,
вызвавших эти отклонения. Объединение принципов управления по отклонению и по
возмущению приводит к комбинированным системам. Часто, помимо основного контура
управления, замыкаемого главной обратной связью, в САУ имеются вспомогательные
контуры (многоконтурные системы) для стабилизации и коррекции динамических свойств.
Одновременное управление несколькими величинами, влияющими друг на друга,
осуществляется в системах многосвязного управления или регулирования.
Теория автоматического управления (ТАУ) изучает принципы построения систем
автоматического управления и закономерности протекающих в них процессов, которые она
исследует на динамических моделях действительных систем с учётом условий работы,
конкретного назначения и конструктивных особенностей управляемого объекта и
автоматических устройств, с целью построения работоспособных и точных систем
управления.
Проблема синтеза и анализа систем автоматического управления — основная
проблема ТАУ. Решение её требует изучения динамических свойств САУ, для чего
необходимо математическое описание поведения всех элементов системы в переходных
процессах. В общем случае процессы в объектах описываются системами обыкновенных
дифференциальных уравнений или уравнений в частных производных в зависимости от
того, имеют ли объекты сосредоточенные или распределенные параметры. Элементы
автоматических устройств также описываются системами дифференциальных уравнений.
Специфичен для ТАУ последующий переход от линейных уравнений к передаточным
функциям — операторным выражениям дифференциальных и разностных уравнений.
Передаточные функции позволяют легко представить математическую модель системы в
виде структурной схемы, состоящей из типовых динамических звеньев. ТАУ вводит
понятия динамических характеристик — передаточных функций, частотных и временных
характеристик, упрощающих составление математических моделей системы и
последующие анализ и синтез систем. Динамический анализ САУ выясняет их
работоспособность и точность. Необходимым условием работоспособности САУ служит
их устойчивость. Для её исследования разработаны критерии устойчивости, позволяющие
определять условия устойчивости и необходимые запасы её по косвенным признакам,
минуя весьма трудную операцию интегрирования уравнений движения системы.
Устойчивость достигается изменением параметров системы и её структуры. В нелинейных
САУ исследуется возможный для этих систем режим автоколебаний. Если же по самому
принципу действия САУ, например для релейных систем, эти колебания неизбежны, то
устанавливаются допустимые параметры — амплитуда и частота автоколебаний. Точность
САУ оценивается показателями, которые в совокупности называется качеством
управления, важнейшие показатели качества САУ: статические и динамические
погрешности и время регулирования. Эти показатели определяются сравнением
действительного переходного процесса изменения управляемых величин с требуемым
законом их изменения; обычно они указываются для одного из типовых законов изменения
управляемой величины. В ТАУ, так же как и при анализе устойчивости, пользуются
косвенными методами анализа качества, не требующими решения исходных уравнений.
Для этого вводятся критерии качества — косвенные оценки показателей качества. При
действии на САУ случайных возмущений наиболее распространён критерий качества
динамической точности — средняя квадратичная ошибка. Эта величина относительно
просто может быть связана со статистическими характеристиками возмущающих
воздействий и параметрами передаточной функции системы. САУ, в которой достигнут
экстремум
какого-либо
показателя
качества,
именуется оптимальной
системой. Нелинейные системы обладают более широкими возможностями достижения
оптимума определённого показателя качества, чем системы линейные. Это обусловило
применение нелинейных связей для повышения качества систем управления.
Анализ системы управления устанавливает свойства системы с уже заданной
структурой. Построение алгоритма управления и разработка соответствующей ему
структуры системы, выполняющей заданную цель при требуемом качестве управления,
установление значений параметров этой системы составляет содержание проблемы
синтеза. До начала разработки системы управления сообщаются необходимые для этого
исходные данные: свойства управляемого объекта, характер действующих на него
возмущений, цель управления и требуемая точность управления.
К объекту управления относится его управляющий орган, через который передаётся
воздействие на объект от управляющего устройства. Известные характеристики
управляющего органа сразу же определяют характеристики исполнительного механизма
управляющего устройства. Но на этом обрывается цепь частей системы управления,
свойства которых определяются однозначно их взаимным влиянием друг на друга. Так
вводится понятие неизменяемой части системы управления — неизменяемой в том смысле,
что свойства её заданы до начала конструирования алгоритма управления и, как правило,
не могут быть изменены. Заданная цель управления определяет и способ управления. В
результате выясняется в общих чертах блочная схема системы управления. В основном
пользуются 2 методами решения проблемы синтеза — аналитическим и последовательных
приближений.
При первом либо находится вид передаточной функции автоматического устройства
или алгоритм управления, либо при выбранной структуре указанного устройства
устанавливаются значения его параметров, дающие экстремум критерию качества. Этот
метод позволяет сразу найти оптимальное решение, но он часто приводит к сложными
громоздким вычислениям.
Во втором методе по заданному критерию качества определяется передаточная
функция автоматического устройства и затем для полученной системы сравниваются
заданные показатели качества с их действительными значениями. Если приближение
оказывается допустимым, расчёт считается законченным и можно приступить к
конструированию устройства. Если же приближение оказывается недостаточным, то
изменяется вид передаточной функции до получения варианта, удовлетворяющего
заданным требованиям точности. При построении сложных систем управления, кроме
теоретических методов, применяется моделирование с применением аналоговых и
цифровых вычислительных машин, на которых воспроизводятся уравнения, описывающие
всю систему управления в целом, и по результатам расчётов, заканчивающихся при
достижении требуемых показателей качества, устанавливается структура устройства
управления. Такой метод синтеза близок по идее к методу последовательных приближений.
Моделирование позволяет оценить влияние таких факторов, как нелинейность
ограничения координат, переменность параметров, которые ставят почти непреодолимые
преграды для аналитического исследования. Применение вычислительных машин
освобождает от трудностей расчёта. Они также используются в составе САУ для
выполнения сложных алгоритмов управления, которые особенно характерны для
адаптивных и оптимальных систем и систем с прогнозированием конечного результата
управления. Решение проблемы синтеза САУ способствовало появлению новых
эффективных принципов управления и развитию важных самостоятельных направлений в
ТАУ: оптимальное управление, статистичная динамика и чувствительность систем
управления. Теория оптимального управления позволила установить структуры систем
управления, обладающих предельно высокими показателями качества при учёте реальных
ограничений, накладываемых на переменные. Показатели оптимальности могут быть
весьма разнообразными. Выбор их зависит от конкретно поставленной задачи. Такими
показателями служат показатели динамических свойств всей системы в целом, критерии
экономичности режимов управляемых объектов и др. Распространены оптимальные по
быстродействию системы, которые переводят объект из одного состояния в другое за
минимальный промежуток времени.
Статистическая динамика систем управления изучает действие на эти системы
случайных возмущений. Методы этой теории позволяют синтезировать системы
управления, обеспечивающие минимум динамической погрешности, решать задачи
построения сглаживающих и прогнозирующих следящих систем, определять динамические
свойства управляемых объектов по данным опыта при их нормальном функционировании
без внесения пробных возмущений. Статистические методы исследования широко
распространены для изучения различных типов систем управления. Большое значение эти
методы приобретают для приспосабливающихся систем. Теория чувствительности систем
управления изучает зависимость динамических свойств этих систем от их меняющихся
параметров и характеристик. Показатель чувствительности служит мерой зависимости
указанных свойств от вариаций параметров. Теория чувствительности позволяет в ряде
случаев указать пути осуществления беспоисковых самонастраивающихся систем.
Системы автоматического регулирования (САР) применяются для регулирования
отдельных параметров (температура, давление, уровень, расход и т.д.) в объекте
управления. В современных системах автоматического управления (САУ) системы
автоматического регулирования являются подсистемами САУ и их применяют для
регулирования различных параметров при управлении объектом или процессом.
Принцип действия всякой системы автоматического регулирования (САР)
заключается в том, чтобы обнаруживать отклонения регулируемых величин,
характеризующих работу объекта или протекание процесса от требуемого режима и при
этом воздействовать на объект или процесс так, чтобы устранять эти отклонения.
Для осуществления автоматического регулирования к регулируемому объекту
подключается автоматический регулятор, вырабатывающий управляющее воздействие на
регулирующий орган. Это управляющее воздействие вырабатывается регулятором в
зависимости от разности между текущим значением регулируемой величины (температуры,
давления, уровня жидкости и т.д.), измеряемой датчиком, и желаемым её значением,
устанавливаемым задатчиком. Регулируемый объект и автоматический регулятор вместе
образуют систему автоматического регулирования.
Основным признаком САР, является наличие главной обратной связи, по которой
регулятор контролирует значение регулируемого параметра.
Пример системы регулирования температуры
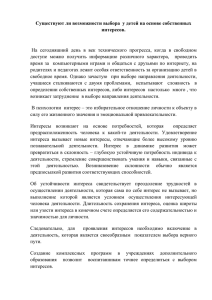
На рис. 1.1 показана блок схема системы регулирования температуры в объекте, а
на Рис. 1.2 функциональная схема САР, показывающая общий принцип работы любой
системы автоматического регулирования.
Рис. 1.1 Блок схема системы регулирования температуры в объекте
Если температура в объекте равна заданной, то сигнал с датчика X1 равен сигналу с
задатчика X0 и сигнал ошибки на входе регулятора е = X1 - X0 = 0, сигнала на выходе
регулятора нет, ИМ не работает и клапан открыт на заданную величину, поддерживая
заданную температуру. Если, например, температура в объекте увеличиться, увеличиться
сигнал с датчика X1, возникнет ошибка «е», заработает ИМ и, прикроет клапан РО для
уменьшения подачи тепла, температура в объекте уменьшится до заданной.
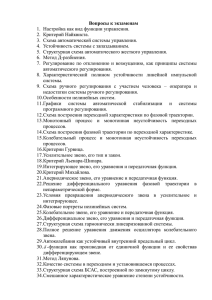
Рис. 1.2 Функциональная схема САР
З – задатчик, для установки заданного значения параметра X0
Д – датчик (термопара, терморезистор, датчик уровня, скорости и др. для разных
систем)
Р – регулятор
ИМ – исполнительный механизм (эл. мотор с редуктором, пневмоцилиндры и др.)
РО – регулирующий орган (кран, вентиль, заслонка и др.)
О – объект регулирования (печь, эл. мотор, резервуар и др.)
У – регулирующее (управляющее) воздействие
Z – помеха (возмущение)
Х – регулируемый параметр
X1– сигнал на выходе датчика
е = X1- X0 ошибка, возникает при отклонении параметра от задания
X0 – заданное значение регулируемого (управляемого) параметра может быть
постоянным X0 или изменяемым (Ut).
Сигнал с задатчика может быть:
-постоянным X0 = const. для поддержание постоянства регулируемого параметра
температуры, давления, уровня жидкости и т. д. (системы стабилизации);
-может изменяться во времени U(t) по определённой программе (программное
регулирование);
-может изменяться во времени U(t) в соответствии с измеряемым внешним
процессом (следящее регулирование).
Контрольные вопросы:
1. Что служит необходимым условием работоспособности САУ?
2. Как вы понимаете функциональную схему САР?
3. Назовите основную проблему ТАУ и каким образом она решается?
2-Лекция
Фундаментальные принципы управления
План:
1. Принцип разомкнутого управления
2. Принцип компенсации (управление по возмущению)
3. Принцип обратной связи (регулирование по отклонению)
Зная статические и динамические свойства системы управления (т.е. свойства
объекта и средств управления), можно построить математическую модель системы и найти
алгоритм управления, обеспечивающий заданный алгоритм функционирования при
известных, задаваемых в качестве исходных данных воздействиях.
Однако модель всегда приближенно описывает систему, а возмущающие
воздействия могут изменяться не известным заранее способом. Поэтому полученный таким
образом алгоритм управления не всегда обеспечивает выполнение заданного алгоритма
функционирования.
В сложных системах алгоритм управления увязывают не только со свойствами
системы и алгоритмом функционирования, но и с фактическим состоянием системы в
процессе функционирования.
В настоящее время в технике используют три фундаментальных принципа
управления:
разомкнутого управления
компенсации
обратной связи
Принцип разомкнутого управления: алгоритм управления вырабатывается только
на основе заданного алгоритма функционирования и не контролируется другими
факторами – возмущениями или выходными координатами процесса.
Принцип разомкнутого управления применим в системах любой сложности, если
возмущающие воздействия не оказывают заметного влияния на ее работоспособность.
Например, экосистема Земли для населения является разомкнутой системой
управления, имеющей саморегулирование, и до последнего времени результаты
хозяйственной деятельности человека компенсировались самовосстановлением флоры и
фауны, водного режима и состава атмосферы.
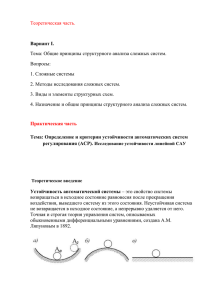
Общая функциональная схема системы показана на рис. 2.1
Рис. 2.1
Задание алгоритма функционирования φ0(t) может вырабатываться как специальным
техническим устройством – задатчиком программы 1, так и выполняться в виде
конструктивного элемента управляющего устройства 2, передающего управляющее
воздействие на объект 3. В последнем случае блок 1 отсутствует. В обоих случаях схема
представляет собой вид разомкнутой цепи, в которой основное воздействие передается от
входного элемента к выходному. Близость φ0 и φ обеспечивается только конструкцией и
подбором физических закономерностей, действующих во всех элементах.
Примером разомкнутого управления является механизм привода клапанов
газораспределения в четырехтактных ДВС и в двухтактных ДВС с прямоточно-клапанной
продувкой. Как известно, точность воспроизведения рассчитанных параметров наполнения
и выпуска зависит от точности изготовления механизма и степени износа его элементов.
Отсутствие реакции на фактическое состояние системы – неустранимый недостаток.
Поэтому при конструировании механизма газораспределения необходимо выбирать ход
клапана, исключающий удар поршня о клапан при зависании последнего.
Принцип компенсации (управление по возмущению).
Если возмущающие воздействия столь велики, что разомкнутая цепь не
обеспечивает требуемой точности выполнения алгоритма функционирования, в некоторых
случаях применяют метод измерения возмущения и внесения корректив в алгоритм
управления по результатам замеров.
Когда отклонение регулируемой величины зависит не только от управляющего ξ, но
и от возмущающего воздействия λ, т.е. φ =F1(ξ1, λ), в принципе можно подобрать
управляющее воздействие ξ=F2(λ) таким образом, чтобы в установившихся режимах
отклонение отсутствовало:
Δφ = φ0-F2(ξ 1,λ) = 0
В простейшем линейном случае, если характеристика объекта в статике
φ0 = k0· ξ – k λ · λ,= const,
ξ= φ 0/k0+k λ·λ/k0
Функциональная схема регулирования по возмущению показана на рис. 2.2.
Нагрузка измеряется с помощью измерительного устройства 4. На вход управляющего
устройства 2 подается сигнал, равный сумме заданного значения φ0 и величины,
пропорциональной нагрузке.
Рис. 2.2
Принцип компенсации применяется в электрических генераторах постоянного тока
(генераторы с компаундной обмоткой возбуждения).
Принцип обратной связи (регулирование по отклонению)
Достоинством регулирования по отклонению является отсутствие необходимости
измерять возмущающие воздействия. Например, в ДВС основным возмущающим
воздействием является изменение момента сопротивления на валу, возможно также
изменение теплоты сгорания и цетанового числа топлива, параметров воздуха на
всасывании. Замер этих возмущающих воздействий затруднителен.
На рис. 2.3 показана схема, в которой коррективы в алгоритм управления вносятся
по фактическому значению координат в системе. Измерительное устройство 4, подает на
вход управляющего устройства 2 сигнал, пропорциональный отклонению управляемой
координате φ. Схема имеет вид замкнутой цепи, т.е. в ней осуществляется принцип
управления по замкнутому контуру.
Рис. 2.3
Введенную дополнительную цепь называют обратной связью, т.к. передача
воздействия в дополнительной связи противоположно направлению передачи основного
воздействия на объект. Сумматор Σ осуществляет вычитание φ из φ 0, т.е. вырабатывает
величину Δφ, называемую отклонением, или ошибкой управления.
Наиболее распространенная задача управления – поддержание заданных законов
изменения во времени параметров объекта (регулирование). Поэтому целесообразно
вырабатывать управляющее воздействие в функции не только Δ φ, но также его
производных и интегралов по времени.
Δφ= φ0 – φ
Для осуществления регулирования необходимо, чтобы функция f являлась
неубывающей функцией Δφ и одного с ней знака. Относительно других аргументов ее знак
определяется из анализа.
Если функция отвечает изложенному требованию, объект 3 и регулятор 2 образуют
замкнутую систему, называемую системой автоматического регулирования.
Специальные системы управления
В дизель-генераторных установках применяются специальные системы управления,
в которых используется принцип компенсации и принцип обратной связи. Это делается с
целью улучшения характеристик переходного процесса и сохранения заданного
распределения нагрузок дизель-генераторов разной мощности, включенных параллельно на
сеть переменного тока. Структурная схема системы показана на рис.2.4
Рис.2.4
Основной канал регулирования - по принципу компенсации, через регулятор
нагрузки РН. Если частота вращения выходит за допустимые пределы, подключается
второй канал регулирования через регулятор скорости РС.
Контрольные вопросы:
1. Как вы понимаете фундаментальный принцип разомкнутого управления
2. Как вы понимаете принцип компенсации (управление по возмущению)
3. Как вы понимаете принцип обратной связи (регулирование по отклонению)
3-Лекция
Классификация систем автоматического управления
План:
1. Стабилизация. Программное управление
2. Следящие системы. Системы с поиском экстремума показателя качества
3. Оптимальное управление. Адаптивные системы
Имеется шесть основных видов автоматического управления.
Стабилизация – система поддержания постоянства управляемой величины.
Желаемый закон в них имеет вид:
φ0 (t) =const
Особенность регулирования по отклонению: если используются регуляторы,
состоящие из элементов, обладающих аналитическими статическими характеристиками
(т.е. не зависимыми от времени), то регулирование по отклонению осуществляется с
определенной ошибкой.
Если схема включает простейшие линейные преобразовательные звенья, ей будут
соответствовать следующие уравнения статики:
φ=ko·ξ-kλ·λ;
ξ=kp·Δφ=kp·(φ0-φ),
где φ0 - задание алгоритма функционирования,
φ – текущее значение параметра, приходящее от датчика,
ξ – управляющее воздействие,
λ – возмущающее воздействие,
ko,kλ,kp постоянные коэффициенты, называемые соответственно коэффициентами
передачи объекта, регулятора и нагрузки.
Тогда значение φ равно:
Т.е. значение регулируемой величины зависит от нагрузки и уменьшается с ее
ростом.
Регулирование, в котором установившаяся ошибка при постоянном заданном
значении φ0 зависит от нагрузки, называется статическим.
Установившаяся статическая ошибка:
Статизм δ равен относительной крутизне регулировочной характеристики:
δ = - dφ/dλ
Если характеристика прямолинейна, то
В некоторых системах статическая ошибка нежелательна. В частности, в установках
с генераторами электрического тока необходимо поддерживать регулируемый параметр
постоянным во всем диапазоне нагрузок, т.е. иметь астатическое регулирование. Для
получения астатического регулирования в регуляторе нужно устранить жесткую
зависимость между положением регулирующего органа и значением регулируемой
величины, для этого в цепь регулирования вводят астатическое звено. Примером
астатического звена является интегрирующее звено, описываемое уравнением:
или dξ/dt=kΔφ
Регулятор будет находиться в равновесии только в том случае, когда dξ/dt=Δφ=0, т.е.
когда регулируемая величина равна заданному значению, Регулировочная характеристика
идеального астатического регулирования представляет собой прямую линию,
параллельную оси нагрузки. На практике из-за неточности регулирования регулируемая
величина находится внутри некоторой зоны значений, заключенной между двумя линиями,
параллельными оси нагрузки.
Практически все автоматизированные установки с ДВС управляются системами
стабилизации.
Программное управление
При программном управлении по заданному алгоритму функционирования строится
специальное устройство – датчик программы, вырабатывающее требуемое значение
управляемой координаты φ0(t). Таким образом, независимо от принципа управления, если
в системе имеется датчик программы, он относятся к классу систем программного
управления.
На практике используют две разновидности программного управления: с временной
программой и с пространственной программой.
В системах первого вида датчик программы вырабатывает непосредственно
функцию φ0(t). Примером могут служить заводные игрушки, в которых равномерное
движение двигателя с помощью профилированных кулачков преобразуется в движение
φ0(t). В ДВС это системы управления газораспределением и подачей топлива.
Второй вид используется в металлообработке (копировальные станки, станки с
ЧПУ).
Следящие системы
В следящих системах алгоритм функционирования заранее не известен.
Регулируемая величина в таких системах должна воспроизводить изменение некоторого
внешнего фактора, следить за ним. Например, автоматическое зенитное орудие должно
поворачиваться, следя за полетом цели. Простые следящие системы на основе сельсинов
применяются в установках с ДВС – например, при дистанционном управлении с мостика
установкой оборотов двигателя (машинный телеграф).
Солнечные трекеры - это устройства, которые отслеживают солнечный путь в
течение всего дня и ориентируют фотоэлектрические панели, отражатели, линзы или
другие оптические устройства на солнце. Поскольку положение солнца на небе меняется со
временем (около 15 градусов в час), а угол высоты и азимутальный угол непрерывно
меняются, используются трекеры для выравнивания системы сбора для максимального
производства энергии.
Изначально микроконтроллер считывает напряжение с выхода панели. Напряжение
считывается через канал АЦП микроконтроллера. Входные данные сравниваются с
заданным пороговым уровнем. Отслеживание инициируется, когда входные данные
превышают предварительно установленный пороговый уровень. Панель сначала
поворачивается по часовой стрелке на шаг, а затем против часовой стрелки на два шага.
Затем он возвращается в исходное положение.
Напряжение измеряется после каждого шага. Эти данные сравниваются с
предыдущими данными, хранящимися в памяти. Процесс продолжается до тех пор, пока
напряжение увеличивается. После пересечения максимального значения (оптимального
положения), когда считываемое напряжение на следующем шаге оказывается ниже, чем
предыдущие данные, панель поворачивается обратно в непосредственное предыдущее
положение. Это оптимальное положение для максимальной мощности при определенной
нагрузке. Как только оптимальное положение найдено, микроконтроллер устанавливает
таймер и ожидает следующего цикла работы через заданное время. Этот процесс будет
продолжаться до тех пор, пока не будет нажата кнопка сброса.
Системы с поиском экстремума показателя качества.
Применяется в системах автоматической настройки радиоприемника.
Экстремальное управление начинают с поиска – выполняют пробные движения в какомлибо выбранном направлении, затем анализируют реакцию системы на эти пробы и по
результатам анализа вырабатывают управляющее воздействие в виде импульса,
приближающего систему к экстремуму.
Оптимальное управление
В таких системах имеется понятие критерия оптимальности, который вычисляется
на основании информации о текущих координатах системы и о внешних воздействиях.
Вычисления производятся счетно-решающим устройством для всей области задаваемых
граничных условий выходных координат и внешних воздействий. Счетно-решающее
устройство по заложенной в него программе вычисляет оптимальное управление ξ.
Оптимальные системы могут быть разомкнутыми и замкнутыми.
Адаптивные системы.
В реальных условиях внешние воздействия иногда приводят к изменению не только
координат, но и параметров системы (коэффициентов уравнений).
Системы, автоматически изменяющие значения своих параметров или структур при
непредвиденных изменениях внешних условий на основании анализа состояния или
поведения системы так, чтобы сохранялось заданное качество ее работы, называются
адаптивными. Обычно адаптивная схема в качестве ядра содержит схему, реализующую
один из фундаментальных принципов управления, а контур адаптации пристраивают к ней
как вторичный, осуществляющий коррекцию параметров. Адаптивные системы
применяются в управлении баллистическими ракетами.
Контрольные вопросы:
1. Исследуйте функцию на экстремум различными методами
2. Сколько основных видов автоматического управления вы знаете?
3. В каких производствах применяют следящие системы управления?
5-Лекция
Типовые входные сигналы
План:
1. Ступенчатое, импульсное и гармоническое типовые воздействия
2. Примеры типовых звеньев
Для оценки динамических свойств системы и отдельных звеньев принято
исследовать их реакцию на типовые входные воздействия, которые наиболее полно
отражают особенности реальных возмущений. Во - первых, это позволяет сравнивать
отдельные элементы между собой с точки зрения их динамических свойств. Во - вторых,
зная реакцию системы на типовые воздействия, можно судить о том, как она будет вести
себя при сложных изменениях входной величины.
Наиболее распространенными типовыми воздействиями являются: ступенчатое,
импульсное и гармоническое воздействия. Любой сигнал u(t), имеющий сложную форму,
можно разложить на сумму типовых воздействий ui(t) и исследовать реакцию системы на
каждую из составляющих, а затем, пользуясь принципом суперпозиции, получить
результирующее изменение выходной величины y(t) суммируя полученные таким образом
составляющие выходного сигнала yi(t).
Особенно важное значение в ТАУ придают ступенчатому воздействию
1(t) =
.
Все остальные воздействия могут быть сведены к нему. Так, например, реальный
импульсный сигнал может быть представлен двумя ступенчатыми сигналами одинаковой
величины, но противоположными по знаку, поданными один за другим через интервал
времени t (рис.5.1).
Зависимость изменения выходной величины системы от времени при подаче на ее
вход единичного ступенчатого воздействия при нулевых начальных условиях называется
переходной характеристикой и обозначается h(t).
Не менее важное значение в ТАУ уделяется импульсной переходной
характеристике, которая описывает реакцию системы на единичное импульсное
воздействие при нулевых начальных условиях, обозначают ω(t). Единичный импульс
физически представляет из себя очень узкий импульс, ширина которого стремится к нулю,
а высота - к бесконечности, ограничивающий единичную площадь. Математически он
описывается дельта - функцией d(t) = 1’(t).
Переходная и импульсная переходная характеристики называются временными
характеристиками. Каждая из них является исчерпывающей характеристиками системы и
любого ее звена при нулевых начальных условиях. По ним можно однозначно определить
выходную величину при произвольном входном воздействии.
Зная передаточную функцию W(p) = K(p)/D(p), выражение для переходной функции
можно найти из формулы Хевисайда:
, где pk - корни характеристического уравнения D(p) =
0. Взяв производную от переходной функции можно получить выражение для импульсной
переходной функции ω(t) = h’(t).
1.2 Переходные характеристики элементарных звеньев
Звеном системы называется ее элемент, обладающий определенными свойствами в
динамическом отношении. Звенья систем регулирования могут иметь разную физическую
основу (электрические, пневматические, механические и др. звенья), но относится к одной
группе. Соотношение входных и выходных сигналов в звеньях одной группы описываются
одинаковыми передаточными функциями.
Простейшие типовые звенья:
усилительное,
интегрирующее,
дифференцирующее,
апериодическое,
колебательное,
запаздывающее.
1) Усилительное звено.
Звено усиливает входной сигнал в К раз. Уравнение
звена у = К*х, передаточная функция W(s) = К. Параметр К
называется коэффициентом усиления.
у
К
t
Выходной
Рис. 1 сигнал такого звена в точности повторяет входной сигнал, усиленный в К
раз (см. рис. 1).
Примерами таких звеньев являются: механические передачи, безынерционные
усилители, жесткий механический рычаг, редуктор, потенциометр, электронный усилитель
и т.п. др.
2) Интегрирующее.
2.1) Идеальное интегрирующее.
Выходная величина идеального интегрирующего звена пропорциональна интегралу
входной величины.
t
y K x ( t )dt ; W(s) =
у
0
t
Рис. 2
K
s
При подаче на вход звена воздействия выходной сигнал
постоянно возрастает (см. рис. 2).
Это звено астатическое, т.е. не имеет установившегося режима. Интегрирующее
звено неограниченно "накапливает" входное воздействие. Примеры интегрирующих
звеньев: электродвигатель, поршневой гидравлический двигатель, емкость и т.п. Введение
его в САУ превращает систему в астатическую, то есть ликвидирует статическую ошибку.
2.2) Реальное интегрирующее.
Передаточная функция этого звена имеет вид:
у
W(s) =
t
Рис. 3
K
.
s(Ts 1)
Переходная характеристика в отличие от идеального звена
является кривой (см. рис. 3).
Примером интегрирующего звена является двигатель постоянного тока с
независимым возбуждением, если в качестве входного воздействия принять напряжение
питания статора, а выходного - угол поворота ротора.
3) Дифференцирующее.
3.1) Идеальное дифференцирующее.
Выходная величина пропорциональна производной по времени от входной:
yK
dx( t )
;
dt
W(s) = K*s
При ступенчатом входном сигнале выходной сигнал представляет собой импульс (функцию). Идеальное дифференцирующее звено реализовать невозможно, так как
величина всплеска выходной величины при подаче на вход единичного ступенчатого
воздействия всегда ограничена. На практике используют реальные дифференцирующие
звенья, осуществляющие приближенное дифференцирование входного сигнала.
3.2) Реальное дифференцирующее.
у
t
Идеальные дифференцирующие звенья физически не
реализуемы. Большинство объектов, которые представляют
собой дифференцирующие звенья, относятся к реальным
дифференцирующим звеньям. Переходная характеристика и
передаточная функция этого звена имеют вид:
Рис. 4
W(s) =
Ks
.
Ts 1
4) Апериодическое (инерционное).
Этому звену соответствуют ДУ и ПФ вида:
T
dy
y Kx ;
dt
W(s) =
K
.
Ts 1
Определим характер изменения выходной величины этого звена при подаче на вход
ступенчатого воздействия величины х0.
Изображение ступенчатого воздействия: X(s) =
x0
. Тогда изображение выходной
s
величины:
Y(s) = W(s) X(s) =
K x0
1
= K x0
.
Ts 1 s
s(Ts 1)
Разложим дробь на простые:
1
A
T
1
B As BTs B 1
1
=
+
=
= = s Ts 1 s s 1
s(Ts 1) Ts 1 s
s(Ts 1)
T
1
Оригинал первой дроби по таблице: L-1{ } = 1, второй:
s
L-1{
1
s
1
T
}= e
t
T
у
.
К
Тогда окончательно получаем:
t
t
T
Рис. 5
y(t) = K x0 (1 - e ).
Постоянная Т называется постоянной времени.
Большинство тепловых объектов являются апериодическими звеньями. Например,
при подаче на вход электрической печи напряжения ее температура будет изменяться по
аналогичному закону (см. рис. 5). Примеры апериодического звена: термопара,
электродвигатель, четырехполюсник из сопротивления и емкости или сопротивления и
индуктивности.
5) Колебательное звено имеет ДУ и ПФ вида
y
d2y
dy
T
T1
y Kx ,
2
dt
dt
T1< 2T2
2
2
K. x0
T1 2T2
t
W(s) =
K
.
T s T1s 1
2 2
2
Рис. 6
При подаче на вход ступенчатого воздействия амплитудой х 0 на переходная кривая
будет иметь один из двух видов: апериодический (при Т1 2Т2) или колебательный (при
Т1 < 2Т2).
6) Запаздывающее.
y(t) = x(t - ),
W(s) = e-s.
Выходная величина у в точности повторяет входную величину х с некоторым
запаздыванием . Примеры: движение груза по конвейеру, движение жидкости по
трубопроводу.
Контрольные вопросы:
1. Что представляет собой передаточная функция непрерывной системы?
2. Какие простейшие типовые звенья вы знаете?
3. Приведите пример интегрирующего звена?
6-Лекция
Передаточная функция. Примеры передаточной функции.
План:
1. Передаточная функция
2. Примеры передаточной функции
Передаточные функции. Отношение оператора воздействия к собственному
оператору называют передаточной функцией или передаточной функцией в операторной
форме.
Передаточной функцией или передаточной функцией в форме изображений
Лапласа называют отношение изображения выходной величины к изображению входной
величины при нулевых начальных условиях. Если звено (система) имеет несколько входов,
то при определении передаточной функции относительно какой-либо одной входной
величины остальные величины полагают равными нулю.
Найдем передаточные функции в форме изображений Лапласа для звена,
описываемого уравнением
a0 y a1 y a2 y b0u b1u c0 f ,
(6.1)
Перейдем в обеих частях этого уравнения к изображениям Лапласа:
La0 y a1 y a2 y Lb0u b1u c0 f .
Используя свойства линейности и дифференцирования оригинала (1-е и 2-е свойства
преобразования Лапласа), при нулевых начальных условиях получим
(a0 s 2 a1s a2 )Y ( s ) (b0 s b)U ( s) c0 F ( s ) ,
(6.2)
где Y (s) Ly(t ); U (s) Lu(t ); F (s) L f (t ).
Полагая последовательно F(s)=0 и U(s)=0 и определяя каждый раз отношение
выходной величины к входной, получим
W1 ( s )
W1 ( s )
b0 s b1
Y ( s)
;
2
U ( s ) a0 s a1 s a2
c0
Y (s)
2
F ( s ) a0 s a1 s a2
(6.3)
Используя передаточные функции (6.3), уравнение (6.2) в изображениях Лапласа
можно записать
Y(s) = W1(s) U(s) + W2(s) F(s).
(6.4)
Это уравнение, как и уравнение (6.3), адекватно исходному дифференциальному
уравнению (6.1) только при нулевых начальных условиях. Если начальные условия не
равны нулю, то уравнениями (6.3) и (6.2) как математическими описаниями исходного
звена пользоваться нельзя.
Передаточная функция — один из способов математического описания
динамической системы. Используется в основном в теории управления, связи и цифровой
обработке сигналов. Представляет собой дифференциальный оператор, выражающий связь
между входом и выходом линейной стационарной системы. Зная входной сигнал системы
и передаточную функцию, можно восстановить выходной сигнал.
В теории управления передаточная функция непрерывной системы представляет
собой отношение преобразования Лапласа выходного сигнала к преобразованию Лапласа
входного сигнала при нулевых начальных условиях. Преобразование ДУ по Лапласу дает
возможность ввести удобное понятие передаточной функции, характеризующей
динамические свойства системы.
Например, операторное уравнение
3s2Y(s) + 4sY(s) + Y(s) = 2sX(s) + 4X(s)
можно преобразовать, вынеся X(s) и Y(s) за скобки и поделив друг на друга:
Y(s)*(3s2 + 4s + 1) = X(s)*(2s + 4)
W(s)
Y(s)
2s 4
2
.
X(s) 3s 4s 1
Полученное выражение называется передаточной функцией.
Передаточной функцией называется отношение изображения выходного воздействия Y(s)
к изображению входного X(s) при нулевых начальных условиях.
W(s)
Y(s)
X(s)
(1)
Передаточная функция является дробно-рациональной функцией комплексной
переменной:
B(s) b 0 b1s b 2 s 2 ... b m s m
W (s)
,
A(s) a 0 a 1s a 2 s 2 ... a n s n
где B(s) = b0 + b1s + b2 s2 + … + bm sm - полином числителя,
А(s) = a0 + a1s + a2 s2 + … + an sn - полином знаменателя.
Передаточная функция имеет порядок, который определяется порядком полинома
знаменателя (n).
Из (1) следует, что изображение выходного сигнала можно найти как
Y(s) = W(s)*X(s).
Так как передаточная функция системы полностью определяет ее динамические
свойства, то первоначальная задача расчета АСР сводится к определению ее передаточной
функции.
Пример
Представить математическое описание и передаточную функцию для R-L цепи,
представленной на рис.2.2
Решение:
Для R-L цепи можно представить следующее дифференциальное уравнение
Рис.1 R-L цепь
Решив уравнение (2) относительно тока I и подставив в уравнение (1), получим
(3)
Где T = R/ L – постоянная времени RL-цепи.
Представим уравнение (3) в операторном виде
Отсюда передаточная функция данного звена будет иметь вид
(4)
Графически это звено изобразится следующим образом
Рис. 2
Контрольные вопросы:
1. Что называется передаточной функцией или передаточной функцией в форме
изображений Лапласа?
2. Где используется и что представляет собой передаточная функция?
3. Приведите пример передаточной функции
7-Лекция
Временные и частотные характеристики систем автоматического управления
План:
1. Частотные характеристики и частотная передаточная функция
2. Фазовая частотная характеристика (ФЧХ) и амплитудно-фазовая частотная
характеристика (АФЧХ)?
3. Импульсная переходная характеристика
Частотные характеристики
Важное значение при описании линейных стационарных систем (звеньев) имеют
частотные характеристики. Они получаются при рассмотрении вынужденных движений
системы (звена) при подаче на ее вход гармонического воздействия.
Для линейных систем справедлив принцип суперпозиции, который можно
сформулировать следующим образом: реакция системы на несколько одновременно
действующих входных воздействий равна сумме реакций на каждое воздействие в
отдельности. Это позволяет ограничиться изучением систем только с одним входом. В
общем случае уравнение линейной стационарной системы с одним входом можно записать
так:
a
0
p n a1 p n1 an y b0 p m b1 p m1 bm u .
(7.1)
Ее передаточная функция по определению
W ( p)
b0 p m b1 p m1 bm
.
a0 p n a1 p n1 an
(7.2)
Функцию W(jω), которую получит из передаточной функции (7.2) при постановке в
нее p= jω:
b0 ( j ) m b1 ( j ) m1 bm
W ( j )
.
a0 ( j ) n a1 ( j ) n1 an
(7.3)
называют частотной передаточной функцией. Частотная передаточная функция является
комплекснозначной функцией от действительной переменной ω, которая называется
частотной.
Функцию W(jω) можно представить в виде
W ( j ) U ( ) jV ( ) A( )e j ( ) ,
(7.4)
где
A( ) U 2 ( ) V 2 ( )
(7.5)
( ) arg W ( j ) .
Если arg W ( j) 2 , то
( ) arg
V ( )
.
U ( )
На комплексной плоскости (рис.7.1) частотная передаточная функция W(jω)
определяет вектор OC , длина которого равна А(ω), а аргумент (угол, образованный этим
вектором с действительной положительной полуосью) φ(ω). Кривую, которую описывает
конец этого вектора при изменении частоты от 0 до ∞ (иногда от –∞ до ∞), называют
амплитудно-фазовой частотной характеристикой (АФЧХ).
Рис. 7.1 Амплитудно-фазовая частотная характеристика (АФЧХ)
Частотную передаточную функцию будем называть также амплитудно-фазовой
частотной функцией. Ее действительную часть U(ω) = Re W(jω) и мнимую часть
V(ω)=ImW(jω) будем называть соответственно вещественной и мнимой частотной
функцией. График вещественной частотной функции [кривая зависимости U=U(ω)]
называют вещественной частотной характеристикой, а график мнимой частотной
функции – мнимой частотной характеристикой.
Модуль А(ω)=|W(jω)| называют амплитудной частотной функцией, ее график –
амплитудной частотной характеристикой.
Аргумент φ(ω)=argW(jω) называют фазовой частотной функцией, ее график –
фазовой частотной характеристикой.
Кроме перечисленных частотных характеристик используют еще логарифмические
частотные характеристики (ЛЧХ), логарифмические амплитудные частотные
характеристики (ЛАЧХ) и логарифмические фазовые частотные характеристики (ЛФЧХ).
Назовем функцию
L() 20 lg A() 20 lg W ( j)
логарифмической
амплитудной
частотной
функцией.
График
зависимости
логарифмической амплитудной частотной функции L( ) от логарифма частоты (lg )
называют логарифмической амплитудной частотной характеристикой (ЛАЧХ). При
построении ЛАЧХ по оси абсцисс откладывают частоту в логарифмическом масштабе: на
отметке, соответствующей значению lg , пишут само значение , а не значение lg , а по
оси ординат – L( ). Логарифмической фазовой частотной характеристикой (ЛФЧХ)
называют график зависимости фазовой частотной функции φ(ω) от логарифма частоты lgω.
При его построении по оси абсцисс, как и при построении ЛАЧХ, на отметке,
соответствующей значению lgω, пишут значение ω.
Единицей L(ω) является децибел, а единицей логарифма частоты в ЛЧХ – декада.
Декадой называют интервал, на котором частота изменяется в 10 раз. При изменении
частоты в 10 раз говорят, что она изменилась на одну декаду.
Временные характеристики
Другой важной характеристикой автоматических систем (звеньев) являются
переходные и импульсные переходные функции и их графики – временные характеристики.
Их используют при описании линейных систем, как стационарных, так и нестационарных.
Переходной функцией системы (звена) называют функцию, описывающую
изменение выходной величины системы (звена), когда на ее вход подается единичное
ступенчатое воздействие при нулевых начальных условиях. Переходную функцию обычно
обозначают h(t). Иначе: переходная функция h(t) есть функция, описывающая реакцию
системы (звена) на единичное ступенчатое воздействие при нулевых начальных условиях.
Аналитически единичное ступенчатое воздействие можно описать единичной
функцией
1 при t 0;
1(t )
0 при t 0.
График переходной функции – кривая зависимости функции h(t) от времени t –
называют переходной или разгонной характеристикой.
Импульсной переходной или весовой функцией (функцией веса) системы (звена)
называют функцию, описывающую реакцию системы (звена) на единичное импульсное
воздействие при нулевых начальных условиях; обозначают эту функцию ω(t). График
импульсной переходной функции называют импульсной переходной характеристикой.
Переходную и импульсную переходную характеристики называют временными
характеристиками.
При определении весовой функции было использовано понятие единичного
импульса. Физически единичный импульс можно представить как очень узкий импульс,
ограничивающий единичную площадь. Математически он описывается функцией δ(t),
которую называют дельта-функцией; дельта-функция является обобщенной функцией.
Контрольные вопросы:
1. Что называют фазовой частотной характеристикой (ФЧХ) и амплитудно-фазовой
частотной характеристикой (АФЧХ)?
2. Что называют импульсной переходной характеристикой?
3. Временные и частотные характеристики систем автоматического управления
8-Лекция
Элементарные звенья и их характеристики: пропорциональное звено,
интегрирующее звено, дифференцирующее звено
План:
1. Типовые или элементарные звенья
2. Пропорциональное звено, интегрирующее звено, дифференцирующее звено
Выше звено было определено как математическая модель элемента. Вообще же
звеном называют математическую модель элемента, соединения элементов или любой
части системы. Звенья, как и системы, могут описываться дифференциальными
уравнениями довольно высокого порядка, и в общем случае их передаточные функции
могут быть записаны в виде
W ( s) (b0 s m b1s m1 bm ) (a0 s n a1s n1 an ) .
(8.1)
Но всегда их можно представить как соединения типовых или элементарных
звеньев, порядок дифференциальных уравнений которых не выше второго.
Из курса алгебры известно, что полином произвольного порядка можно разложить
на простые множители – множители вида
k1s, (d1s d 2 ), (d1s 2 d 2 s d 3 ) ,
(8.2)
поэтому передаточную функцию (8.1) можно представить как произведение простых
множителей вида (8.2) и простых дробей вида
k1 s , k (d1s d 2 ) , k (d1s 2 d 2 s d 3 ) .
(8.3)
Звенья, передаточные функции которых имеют вид простых множителей (8.2) или
простых дробей (8.3), называют, типовыми или элементарными звеньями.
Прежде чем переходить к изучению элементарных звеньев, вспомним формулы для
модуля и аргумента комплексного числа. Пусть комплексное число представлено в виде
отношения двух произведений комплексных чисел
m
n
Z zi
~z
k
i 1
k 1
~
zk ~
zk e j arg zk , то для модуля и аргумента комплексного числа
Так как zi zi e j arg zi , ~
имеем
m
Z
z
i
i 1
n
~z
m
n
i 1
k 1
; arg Z arg zi arg ~
zk .
k
k 1
Таким образом, справедливо следующее правило модулей и аргументов
комплексных чисел: модуль комплексного числа, представленного в виде отношения двух
произведений комплексных чисел, равен отношению произведения модулей сомножителей
числителя к произведению модулей сомножителей знаменателя, а его аргумент – разности
суммы аргументов сомножителей числителя и суммы аргументов сомножителей
знаменателя.
Пропорциональное звено. Пропорциональным называют звено, которое
описывается уравнением у(t) = ku(t), или, что то же, что и передаточной функцией W(s)=k.
Частотные и временные функции этого типового звена имеют следующий вид:
W (jω) = k; U(ω) = k; V(ω) = 0; А(ω) = k;
φ(ω) = 0; L(ω) = 20lgk; h(t)=k1(t); ω(t) = δ(t).
На рис.8.1 представлены некоторые из характеристик пропорционального звена:
амплитудно-фазовая частотная характеристика (рис.8.1,а) есть точка на действительной
оси; фазовая частотная характеристика (и ЛФЧХ) совпадает с положительной полуосью
частот; логарифмическая амплитудная частотная характеристика (рис.8.1,б) параллельна
оси частот и проходит на уровне L(ω)=20lgk. Переходная характеристика (рис.8.1, в)
параллельна оси времени и проходит на уровне h = k.
Рис.8.1
Интегрирующее звено. Интегрирующим называют звено, которое описывается
уравнением ру = ku или передаточной функцией W(s) = k/s.
Частотная передаточная функция W(jω) = k/jω = -jk/ω. Остальные частотные и
временные функции имеют следующий вид:
U(ω)=0; V(ω)=-k/ω; A(ω)=k/ω; φ(ω) = -π/2; L(ω) = 20lgk-20lgω; h(t) = kt; ω(t)=k.
Амплитудно-фазовая частотная характеристика (рис.8.1а) интегрирующего звена
совпадает с отрицательной мнимой полуосью. ЛФЧХ (рис.8.2,б) параллельна оси частот и
проходит на уровне φ = -π/2; сдвиг фазы не зависит от частоты и равен -π/2. ЛАЧХ
(рис.8.2,б) – наклонная прямая, проходящая через точку с координатами ω = 1 и L(ω) = 20
lgk. Как видно из уравнения L(ω) = 20lgk - 20lgω, при увеличении частоты на одну декаду
ордината L(ω) уменьшается на 20дБ. Поэтому наклон ЛАЧХ равен -20дБ/дек (читается:
минус двадцать децибел на декаду). Переходная характеристика представляет собой
прямую, проходящую через начало координат с угловым коэффициентом наклона, равным
k (рис.8.2,в).
Рис.8.2.
Дифференцирующее звено. Дифференцирующим называют звено, которое
описывается уравнением у = kpu или передаточной функцией W(s) = ks. Частотные и
временные функции имеют следующий вид:
W(jω) = jkω; U(ω) = 0; V(ω) = kω; А(ω) = kω;
φ(ω) = π/2; L(ω) = 20lgk + 20lgω; h(t) = δ(t); ω(t) = δ(t).
Амплитудно-фазовая частотная характеристика (рис.8.3,а) совпадает с
положительной мнимой полуосью. ЛФЧХ (рис.8.3,б) параллельна оси частот и проходит на
уровне φ = π/2; сдвиг фазы не зависит от частоты и равен π/2. ЛАЧХ есть прямая,
проходящая через точку с координатами ω = 1 и L(ω) = 20lgk и имеющая наклон 20дБ/дек
(читается: плюс двадцать децибел на декаду); L(ω) увеличивается на 20дБ при увеличении
частоты на одну декаду.
Рис.8.3
Контрольные вопросы:
1. Что называют пропорциональным звеном?
2. Что называют интегрирующим звеном?
3. Что называют дифференцирующим звеном?
9-Лекция
Элементарные звенья и их характеристики: апериодическое звено,
колебательное звено, консервативное звено
План:
1. Апериодическое звено или инерционное звено первого порядка
2. Колебательное звено
3. Консервативное звено
Апериодическое звено. Апериодическим звеном первого порядка называют звено,
которое описывается уравнением
(Тр + l)y = ku
или передаточной функцией
W(s) = k/(Ts + 1).
(9.1)
Это звено также называют инерционным звеном или инерционным звеном первого
порядка. Апериодическое звено в отличие от вышерассмотренных звеньев характеризуется
двумя параметрами: постоянной времени Т и передаточным коэффициентом k.
Частотная передаточная функция
W(jω) = k/(Tjω +1).
(9.2)
Умножив числитель и знаменатель на комплексно-сопряженное знаменателю число,
получим
U(ω) = k/[(Tω)2 + 1]; V(ω) = -kTω/[(Tω)2 + 1].
(9.3)
Амплитудную и фазовую частотные функции можно определить, воспользовавшись
правилом модулей и аргументов.
Так как модуль числителя частотной передаточной функции (9.4) равен k, а модуль
знаменателя
T 2 1 , то
A() k
T 2 1 .
(9.4)
Аргумент числителя W(jω) равен нулю, а аргумент знаменателя arctgωT, поэтому
φ(ω) = arg W(jω) = - arctg ωT. Из (9.4).
L() 20 lg A() 20 lg k 20 lg
T 2 1 .
(9.5)
Решив дифференциальное уравнение (2.44) при u = 1(t) и нулевом начальном
условии (х(0) = 0), получим h(t) = k(1 - е-t/T). Весовая функция
ω(t) = h(t) = (k/T) е-t/T.
АФЧХ апериодического звена (рис.9.1,а) есть полуокружность, в чем нетрудно
убедиться, исключив из параметрических уравнений (9.3) АФЧХ частоту.
Логарифмическая амплитудно-частотная характеристика представлена на рис.9.1,б.
На практике обычно ограничиваются построением так называемой асимптотической ЛАЧХ
(ломаная линия на том же рис.9.1,б).
Только в критических случаях, когда небольшая погрешность может повлиять на
выводы, рассматривают точную ЛАЧХ. Впрочем, точную ЛАЧХ можно легко построить по
асимптотической ЛАЧХ если воспользоваться следующей зависимостью (ΔL – разность
между асимптотической и точной ЛАЧХ):
Tω
ΔL
...
...
0,10
0,04
0,25
0,25
0,40
0,62
0,50
0,96
1,0
3,0
2,0
0,96
2,5
0,62
4,0
0,25
10,0
0,04
Частоту ω1=1/Т, при которой пересекаются асимптоты, называют сопрягающей.
Точная и асимптотическая ЛАЧХ наиболее сильно отличаются при сопрягающей частоте;
отклонение при этой частоте примерно равно 3 дБ.
Уравнение асимптотической ЛАЧХ имеет вид
20 lg k при 1 ;
L( )
20 lg k 20 lg T при 1.
Рис.9.1
Оно получается из уравнения (2.48), если в нем под корнем при ω < ω1 пренебречь
первым слагаемым, а при ω ≥ ω1 – вторым слагаемым. Согласно полученному уравнению,
асимптотическую ЛАЧХ можно строить следующим образом: на уровне L(ω) = 20lgk до
частоты ω = ω1 провести прямую, параллельно оси частот, а далее через точку с
координатами ω = ω1 и L(ω) = 20lgk – прямую под наклоном – 20 дБ/дек.
По АФЧХ или ЛАЧХ легко определить параметры Т и k апериодического звена
(рис.9.1).
Логарифмическая фазовая частотная характеристика изображена на рис.9.1,б. Эта
характеристика асимптотически стремится к нулю при ω → 0 и k –π/2 при ω→∞. При ω =
ω1 фазовая частотная функция принимает значение -π/4, т.е. φ(ω1) = π/4. ЛФЧХ всех
апериодических звеньев имеют одинаковую форму и могут быть получены по какой-либо
одной характеристике параллельным сдвигом вдоль оси частот влево или вправо в
зависимости от постоянной времени Т. Поэтому для построения ЛФЧХ апериодического
звена можно воспользоваться шаблоном или номограммой (рис.9.1,г).
Переходная характеристика апериодического звена (рис.9.1,в) представляет собой
экспоненциальную кривую. По ней можно определить параметры: передаточный
коэффициент, равный установившемуся значению h(∞); постоянную времени, равную
значению t, соответствующему точке пересечения касательной к характеристике в начале
координат с ее асимптотой (рис.9.1,в).
Форсирующее звено. Форсирующим звеном, или форсирующим звеном первого
порядка называют звено, которое описывается уравнением
y = k(Tp + 1) u
или, что то же, передаточной функцией
W(s) = k (Ts + 1).
Это звено, как и апериодическое, характеризуется двумя параметрами: постоянной
времени Т и передаточным коэффициентом k.
Частотная передаточная функция
W(jω) = k (Tjω +1).
Остальные частотные и временные функции имеют следующий вид:
АФЧХ (рис.9.2,а) есть прямая, параллельная мнимой оси и пересекающая
действительную ось в точке U = k. ЛАЧХ изображена на рис.9.2,б. Как и в случае
апериодического звена, на практике ограничиваются построением асимптотической ЛАЧХ
(ломаная линия). Частоту ω = 1/Т, соответствующую точке излома этой характеристики,
называют сопрягающей частотой.
Уравнение асимптотической ЛАЧХ форсирующего звена
20 lg k при 1 ;
.
L( )
20
lg
k
20
lg
T
при
.
1
Асимптотическая ЛАЧХ при < 1; параллельна оси частот и проходит на уровне
L = 20 lgk, а при ≥ 1 имеет наклон 20 дБ/дек.
ЛФЧХ форсирующего звена можно получить зеркальным отражением относительно
оси частот ЛФЧХ апериодического звена и для ее построения можно воспользоваться тем
же шаблоном и номограммой (см.рис.9.2,г), которыми пользуются для построения
последней.
Рис.9.2
Колебательное, консервативное и апериодическое второго порядка звенья.
Звено, которое можно описать уравнением
T
2
0
или в другой форме
p 2 T1 p 1 y ku ,
T
где Т = То,
2
p 2 2Tp 1 y ku ,
(9.6)
= T1/(2T), или передаточной функцией
W ( s ) k /(T 2 s 2 2Ts 1)
(9.7)
называют колебательным, если 0 < < 1, консервативным, если
1.
апериодическим звеном второго порядка, если
=
Коэффициент ε
0 (T1=0), и
называют
коэффициентом демпфирования.
Колебательное звено. (0< <1). Частотная передаточная функция
W ( j ) k / 1 T 2 2 j 2T
Умножив числитель и знаменатель на комплексно-сопряженное знаменателю выражение,
получим вещественную и мнимую частотные функции:
2kT
k (1 T 2 2 )
V
(
)
.
U ( )
;
(1 T 2 2 ) 2 (2T ) 2
(1 T 2 2 ) 2 (2T ) 2
Фазовая частотная функция, как это видно из АФЧХ (рис. 9.3, а), изменяется
монотонно от 0 до — и выражается формулой
2T
arctg 1 T 2 2 ïðè 1 / T
( )
2T
arg tg
ïðè 1 / T
1 T 2 2
Логарифмическая фазовая частотная характеристика (рис. 9.3, б) при 0
асимптотически стремится к оси частот, а при — к прямой . Ее можно
построить с помощью шаблона. Но для этого необходимо иметь набор шаблонов,
соответствующих различным значениям коэффициента демпфирования.
Амплитудная частотная функция
A( ) k / (1 T 2 2 ) 2 (2T ) 2 ,
логарифмическая амплитудная функция
L( ) 20 lg k 20 lg (1 T 2 2 ) 2 (2T ) 2
Уравнение асимптотической ЛАЧХ имеет вид
20 lg kïðè 1
L( )
20 lg k 40 lg Tïðè 1
(9.8)
где
1 1 / T является сопрягающей частотой. Оно получается из уравнения (2.51),
1 cоставить только единицу, а при 1 — слагаемое T 4 4 .
Асимптотическая ЛАЧХ (рис. 9.3, б) при 1 параллельна оси частот, а при 1
если под корнем при
имеет наклон — 40 дБ/дек.
Следует иметь в виду, что асимптотическая ЛАЧХ (рис. 9.3, б) при малых значениях
коэффициента демпфирования довольно сильно отличается от точной ЛАЧХ. Точную
ЛАЧХ можно построить по асимптотической ЛАЧХ, воспользовавшись кривыми
отклонений точных ЛАЧХ от асимптотических (рис. 9.3, г).
Решив дифференциальное уравнение (2.49) колебательного звена при u=1(t) и
нулевых начальных условиях [у(0)=у(0)=0], найдем переходную функцию:
2 2 t
h(t ) k 1
e sin( t 0 ),
где
/ T ; 1 / T ; 0 arctg
2
1 2
Весовая функция
(t ) h(t )
k ( 2 2 )
e t sin t.
По переходной характеристике (рис. 9.3, в) можно определить параметры колебательного
звена следующим образом.
Рис 9.3
Рис 9.4
Передаточный коэффициент k определяют по установившемуся значению h()
переходной функции. Постоянную времени Т и коэффициент демпфирования
можно
найти из уравнений
Tk 2 ; A1 / A2 eTk
или
2 / Tk ;
1
A
ln 1 ,
Tk A2
где Тк — период колебаний; А1 и А2 — амплитуды двух соседних колебаний
относительно установившегося значения (рис. 9.3, в).
Консервативное звено ( =0). Передаточная функция
W ( s ) k /(T 2 s 2 1).
Частотная передаточная функция
W ( j ) k /(1 T 2 2 ).
Фазовая частотная функция, как это следует из АФЧХ /рис. 9.4, а),
0ïðè 1 / Ò;
ïðè 1 / Ò
( )
Это выражение можно получить из фазовой частотной функции колебательного звена
предельным переходом при 0 . Нетрудно выписать выражения для остальных
частотных функций; ЛЧХ приведены на рис. 9.4, б.
Переходная функция
h(t ) k (1 cos 2t ); 1 1 / T
Переходная характеристика (рис. 9.4, в) представляет собой график гармонических
колебаний.
Апериодическое звено второго порядка ( 1) . Передаточную функцию (2.50)
при
1 можно преобразовать к виду
W ( s)
где
T1, 2
T
2 1
k
,
(T1s 1)(T2 s 1)
.
Апериодическое звено второго порядка можно представить как последовательное
соединение двух апериодических звеньев первого порядка. Оно не относится к числу
элементарных звеньев.
Контрольные вопросы:
1. Какими параметрами характеризуется апериодическое звено?
2. Логарифмическая фазовая частотная характеристика апериодического звена?
3. Колебательное, консервативное и апериодическое второго порядка звенья. Уравнение.
10-Лекция
СТРУКТУРНЫЕ СХЕМЫ СТАЦИОНАРНЫХ ЛИНЕЙНЫХ СИСТЕМ.
ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ОТКРЫТОЙ СИСТЕМЫ
План:
1. Основные правила преобразования структурных схем
2. Частотные характеристики разомкнутых систем
Структурной схемой в теории автоматического управления называют графическое
изображение математической модели автоматической системы управления в виде
соединений звеньев. Звено на структурной схеме условно обозначают в виде
прямоугольника с указанием входных и выходных величин, а также передаточной функции
внутри него. Иногда вместо -передаточной функции указывают уравнение или характеристику. Звенья могут быть пронумерованы и их передаточные функции, уравнения или
характеристики представлены вне структурной схемы.
Входные и выходные величины записывают в виде изображений, если передаточные
функции задают в форме изображений. Если же передаточные функции задают в
операторной форме или звенья описывают дифференциальными уравнениями, то входные
и выходные переменные записывают в виде оригинала.
Сравнивающие (рис. 10.1, а, б) и суммирующие (рис. 10.1, в) звенья изображают в
виде круга, разделенного на секторы. В сравнивающем звене сектор, на который подается
«вычитаемое», затемняют (рис. 10.1, б) или перед соответствующим входом ставят знак
минус (рис. 10.1, а).
Структурную схему широко используют на практике при исследовании и
проектировании автоматических систем управления, так как она дает наглядное
представление о связях между звеньями, о прохождении и преобразовании сигналов в
системе.
При математическом описании автоматическую систему обычно изображают в виде
блок-схемы и для каждого «блока» (элемента) записывают уравнения, исходя из
физических законов, которым подчиняются процессы в нем. Структурную схему можно
составить на основании этой блок-схемы и полученных уравнений или только на основании
последних. И дальнейшие преобразования, необходимые для получения уравнений и
передаточных функций системы, проще и нагляднее производить по структурной схеме.
Звено на структурной схеме не обязательно изображает модель какого-либо
отдельного элемента. Оно может быть моделью элемента, соединения элементов или
вообще любой части системы.
Основные правила преобразования структурных схем. 1. Последовательное
соединение звеньев (рис. 10.2, а). При последовательном соединении выходная величина
каждого предшествующего звена является входным воздействием последующего звена.
При преобразовании структурных схем цепочку из последовательно соединенных звеньев
можно заменить одним
в)
б)
а)
y1
y=y1-y2
y=y1-y2
y1
y1
y=y 1+y2
y2
y2
y2
Рис. 10.1
звеном (рис. 10.2, б) с передаточной функцией W (s), равной произведению передаточных
n
функций отдельных звеньев: W ( s ) Wi ( s ).
i 1
б)
a)
y1
W1
W2
y2 yn-1
Рис 10.2
yn
Wп
y0
yn
W
Запишем уравнения звеньев y1=W1y0, y2=W2y1,……., yn=Wnyn-1.
Исключив из этой системы переменные y1, y2,…..,yn-1, получим
Yn=W1W2…..,Wny0,
откуда
n
W Wj
j 1
2.
Параллельное соединение звеньев (рис. 10.3, а). При параллельном
соединении на вход всех звеньев подается один и тот же сигнал, а выходные величины
складываются. Цепь из параллельно соединенных звеньев можно заменить одним звеном
(рис. 2.15, б) с передаточной функцией W (s), равной сумме передаточных функций
входящих в нее звеньев:
n
W ( s) Wi ( s)
i 1
.
Для вывода этой формулы составим уравнения для каждых звеньев:
y1=W1y0; y2=W2y0;………..;yn=Wny0
n
Сложив эти уравнения и учитывая, что y Wi ( s ) получим искомую формулу.
i 1
3.
Звено, охваченное обратной связью (рис. 2.16, a). Принято считать, что звено
охвачено обратной связью, если его выходной сигнал через какое-либо другое звено
подается на вход. При этом если сигнал у1 обратной связи вычитается из входного
воздействия у0, т.е. е1=у0–у1, то обратную связь называют отрицательной. Если сигнал у1
обратной связи складывается с входным воздействием у0, т.е. е1=у0+у1 то обратную связь
называют положительной.
Разомкнем обратную связь перед сравнивающим звеном (рис. 10.4, а). Тогда
получим цепь из двух последовательно соединенных звеньев. Поэтому передаточная
функция W разомкнутой цепи (рис. 10.4, а) равна произведению передаточной функции Wn
прямой цепи и передаточной функции Wo c обратной связи: W = WnWo.c (рис. 10.4, б).
Передаточная функция Ws замкнутой цепи с отрицательной обратной связью–звена,
охваченного отрицательной обратной связью, – равна передаточной функции прямой цепи,
деленной на единицу плюс передаточная функция разомкнутой цепи:
W3 Wn /(1 W )
Для вывода этой формулы выпишем уравнения для каждого звена:
y Wn e1 ; y1 Wo.c y; e1 y0 y1
В этой системе последнее уравнение –уравнение сравнивающего звена –называют
уравнением замыкания.
Исключив переменные е1 и у1 из приведенной системы, получим уравнение
у=Wn(у0–Wo.cy) или (1 + Wn Wo.c)y=Wny0. Отсюда
W3 Wn /(1 WnWo.c ) Wn /(1 W )
Если обратная связь положительна, то аналогично получим
W3 Wn /(1 W ).
Передаточная функция замкнутой цепи с положительной обратной связью равна
передаточной функции прямой цепи,
а)
y0
а)
W1
y
Wп
y1
y2
y1
y2
y0
e1
Wо.с
W2
б)
Wn
б)
y0
yп
y0
y
в)
y
W
W
y0
(+)
Рис 10.3
y1
e1
Wn
y
Рис10.4
деленной на единицу минус передаточная функция разомкнутой цепи. Если
передаточная функция Wо,c=1, то обратная связь называется единичной и структурная
схема изображается так, как показано на рис. 2.16, в. Передаточная функция W 3 при этом
принимает вид W3=Wn/(l+Wn) при отрицательной обратной связи и W3 = Wn(l – Wn) при
положительной обратной связи.
При преобразовании структурных схем возникает необходимость переноса и
перестановки сумматоров и узлов. Рассмотрим, какие изменения в схеме при этом нужно
произвести.
4. Перенос сумматора (рис. 10.5). Легко показать, что при переносе сумматора по
ходу сигнала необходимо добавить звено с передаточной функцией, равной передаточной
функции звена, через которое переносится сумматор (рис. 10.5, а). Если сумматор
переносится против хода сигнала, то необходимо добавить звено с передаточной функцией,
равной обратной передаточной функции звена, через которое переносится сумматор (рис.
10.5, б).
При переносе сумматора возникают неэквивалентные участки линии связи. Эти
участки на рис. 10.5 заштрихованы.
5. Перенос узла (рис. 10.6, а). При переносе узла также необходимо добавить звено.
Если узел переносится по ходу сигнала, то добавляется звено с передаточной функцией,
равной обратной передаточной функции звена, через которое переносится узел (рис. 10.6,
б). Если узел переносится против хода сигнала, то добавляется звено с передаточной
функцией, равной передаточной функции звена, через которое переносится узел (рис. 10.6,
в).
f
W2
f
a)
y1
y0
e1
y1
y2
W1
W2
y2
W1
W2
f
W1-1
f
б)
y0
y1
W1
e1
y2
y0
W2
W1
W2
Рис 10.5
Рис.10.6
Рис.10.7
6. Перестановка узлов и сумматоров (рис. 10.7). Узлы можно переставлять местами
(рис. 10.7, а). Точно так же можно переставлять сумматоры, не добавляя звена (рис. 10.7,
б). При перестановке узла и сумматора (перенос узла через сумматор) необходимо добавить
звено – суммирующее или сравнивающее (рис. 10.7, в, г).
При переносе узла через сумматор, а также при перестановке сумматоров возникают
неэквивалентные участки линии связи. Эти участки на рисунке заштрихованы.
Частотные характеристики. При исследовании и проектировании автоматических
систем обычно используют амплитудно-фазовые и логарифмические частотные
характеристики разомкнутых систем. Передаточные функции W(s) разомкнутых
одноконтурных, а иногда и многоконтурных систем можно преобразовать к виду
n
W ( s) Wi ( s )
i 1
где Wi (s ) – передаточные функции элементарных звеньев.
(10.1)
В этом случае модули и аргументы частотных передаточных функций системы и
звеньев A( ) W ( j ) ; Ai ( ) Wi ( j ) ; ( ) arg W ( j ); i ( ) arg Wi ( j ) в
соответствии с правилом модулей и аргументов комплексных чисел связаны между собой
соотношениями
n
A( ) Ai ( );
(10.2)
i 1
n
( ) i ( )
(10.3)
i 1
Вещественные и мнимые частотные функции системы определяются равенствами
U ( ) A( ) cos ( );
V ( ) A( ) sin ( ).
(10.4)
Пользуясь полученными соотношениями (10.2)-(10.4), можно построить АФЧХ. Из
(10.2) очевидно
n
L( ) Li ( )
(10.5)
i 1
где L( ) =20lgА( ) и Li ( ) =20lgАi( ) –логарифмические амплитудные частотные
функции.
Из (10.3) и (10.5) вытекает следующее правило построения ЛЧХ (ЛАЧХ и ЛФЧХ)
систем, передаточные функции которых преобразованы к виду (2.54): строят ЛЧХ
отдельных звеньев и затем их графически складывают.
На основании (2.58) можно также сформулировать несколько иной, более простой
порядок построения ЛАЧХ. Проиллюстрируем это сначала на конкретном примере.
Пусть W ( s) 100 ( s 1) / S v (10 s 1)(0,01s 2 0,1s 1) .
Логарифмическая амплитудная частотная функция
L( ) 40 v 20 lg 20 lg 2 1 20 lg (1 0,01 2 ) 2 (0,1 ) 2 .
Асимптотическая ЛАЧХ рассматриваемой системы состоит из четырех асимптот
(рис. 10.8, а, б, в) и строится следующим образом. Вычислим сопрягающие частоты:
1 1 / 10 0,1; 2 1; 3 1/ 0,1 10.
Здесь 1 , 2 и 3 - сопрягающие частоты апериодического, форсирующего и
колебательного звеньев соответственно.
Напомним, что при построении асимптотической ЛАЧХ элементарных звеньев при
частотах, меньших сопрягающей частоты, под корнем оставляют только единицу
(остальными членами пренебрегают), а при частотах, больших сопрягающей частоты, члены с наивысшей степенью . Поэтому в рассматриваемом примере при 1
L( ) 40 v20 lg .
Это уравнение первой асимптоты. Согласно этому уравнению, первую асимптоту
проводят через точку с координатами 1 и L 20 lg k с наклоном – v20 дБ/дек. Она
кончается на первой сопрягающей частоте.
При
1 2 аналогично имеем
L( ) 40 v20 lg 20 lg 10 20 v20 lg 20 lg .
Это уравнение второй асимптоты. Ее
наклон изменяется на – 20 дБ/дек и
обусловливается
апериодическим
звеном.
Вторую асимптоту проводят от конца первой
асимптоты до второй сопрягающей частоты
согласно ее уравнению с наклоном (- v20–20)
дБ/дек.
При
2 3
L( ) 20 v20 lg 20 lg 20 lg 20 v20 lg .
Это уравнение третьей асимптоты. Ее
наклон
изменяется
на
20
дБ/дек
и
обусловливается форсирующим звеном. Третью
асимптоту проводят от конца второй асимптоты
до третьей сопрягающей частоты с наклоном – v20 дБ/дек.
При
3 .
L( ) 20 v20 lg 40 lg 0,1 60 v20 lg 40 lg .
Рис.10.8
Это уравнение последней, четвертой,
асимптоты. Ее наклон изменяется по отношению к третьей асимптоты на –40 дБ/дек
и обусловливается колебательным звеном.
Теперь нетрудно сформулировать общее правило построения асимптотической
ЛАЧХ системы с передаточной функцией вида
n
W ( s) Wi ( s )
i 1
где Wi (s ) – передаточные функции элементарных звеньев.
Правило построения асимптотической ЛАЧХ.
1.
Вычисляют сопрягающие частоты и значение 201gk, где k –передаточный
коэффициент системы, равный произведению передаточных коэффициентов звеньев
n
(k ki ).
i 1
2. Строят первую асимптоту, которую проводят допервой сопрягающей частоты через
точку с координатами =1 и L=201gk с наклоном – v20 дБ/дек. Здесь v равно разности
между числами интегрирующих и дифференцирующих звеньев.
3. Проводят вторую асимптоту от конца первой асимптоты до второй сопрягающей
частоты. Ее наклон изменяется на 20,–20, 40 или – 40 дБ/дек в зависимости от того, является
ли 1 сопрягающей частотой форсирующего, апериодического, форсирующего второго
порядка или колебательного звена соответственно.
4. Строят каждую последующую асимптоту аналогично второй. Изменение наклона (i+1)-й
асимптоты зависит от того, сопрягающей частотой какого элементарного звена является i
.
Если какая-либо сопрягающая частота является кратной и ее кратность равна , т.е.
имеется одинаковых элементарных звеньев, то изменение наклона при этой частоте в
раз больше, чем при соответствующей простой частоте.
Контрольные вопросы:
1. Как изображают сравнивающие и суммирующие звенья?
2. Правило построения асимптотической ЛАЧХ?
3. Уравнения первой и второй асимптот?
11-Лекция
Представление системы автоматического управления в виде «ввода-вывода»
План:
1. Модель вход- состояние-выход (ВСВ)
2. Вектор состояния и вектор входных сигналов
3. Системы с одним входом и одним выходом
Модель вход- состояние-выход (ВСВ) или модель в пространстве состояний (SS
модель).
Такие модели описывают состояние исследуемого объекта системой
дифференциальных уравнений первого порядка, записанных относительно некоторых
переменных – переменных состояния. В набор переменных состояния могут входить любые
внутренние переменные при условии, что все они в совокупности однозначно определяют
текущее состояние системы в любой момент времени. Это, в частности, означает, что
переменные, не входящие в этот набор, могут быть выражены через переменные состояния
и входные переменные посредством алгебраических уравнений. Состояние линейной
электрической цепи, например, однозначно определяется токами в индуктивностях и
напряжениями на емкостях. Остальные токи и напряжения цепи могут быть рассчитаны
через указанные величины и параметры источников энергии.
Пусть система управления описывается n переменными состояния и имеет r входов
и m выходов.
Рис. 11.1. Структурная схема многомерной системы
Состояние системы описывается дифференциальными уравнениями первого порядка
относительно каждой из переменных состояния. Эти уравнения для линейных систем
имеют следующий вид:
Матрицы-столбцы, состоящие из переменных состояния и входных сигналов, называются
вектором состояния и вектором входных сигналов соответственно:
где полужирное начертание символа x или u означает вектор (матрица- столбец).
Тогда процессы в системе управления можно описать в компактном виде
дифференциальным уравнением состояния
X=Ax+Bu
(1)
которое часто называют просто уравнением состояния. Уравнение состояния
связывает скорость изменения состояния системы с самим состоянием и входными
сигналами. В общем случае выходные сигналы линейной системы связаны с переменными
состояния и входными сигналами уравнением выхода
y=Cx+Du
где
(2)
– вектор выходных переменных
В (1) и (2) используются следующие матрицы
А – матрица коэффициентов системы – квадратная матрица состояний размерности
n x n, где n – число переменных состояния;
B – матрица входа размера n x r, где r – число входных величин;
C – матрица выхода размерности m x n;
D – матрица обхода, определяющая прямую зависимость выхода отвхода, имеющая
размерность m x r.
Элементы матриц А, В, С и D обозначаются такими же, как и матрицы, но
строчными, буквами.
Для наглядности размерности можно указать над матрицами уравнения состояния:
Стрелки над матрицами поставлены для демонстрации следующего известного
правила. Произведение B·U матриц в указанном порядке возможно в том и только в том
случае, если число столбцов матрицы B равно числу строк матрицы U. В матрице,
являющейся произведением двух матриц, число строк равно числу строк левого
сомножителя, а число столбцов – числу столбцов правого сомножителя. Данное правило
можно изобразить с помощью стрелок над размерами матриц: перемножать можно матрицы
с одинаковыми внутренними размерами, а наружные размеры дают размерность
результирующей матрицы.
Системы с одним входом и одним выходом называют SISO системами (SISO – singleinput ∕ single-output). Системы с несколькими входами и выходами называют MIMO
системами (multiple-input ∕ multiple-output). Уравнения (1.28) и (1.29) могут быть записаны
как для MIMO, так и для SISO систем. Если система имеет один вход, т.е. r = 1, то матрица
B является столбцом (n x 1), а вектор u превращается в скалярную переменную. Если
система имеет только один выход (m = 1), то вектор y превращается в скалярную
переменную, а матрица C имеет вид строки длиною 1 х n.
Смысл модели в переменных состояния заключается в том, что она, сохраняя
соотношения между входами и выходами системы, позволяет одновременно исследовать
поведение внутренних ее переменных. При надлежащем выборе они могут описывать
различные физические величины (токи, напряжения, скорости, ускорения, перемещения,
температуры и т.п.), представляющие интерес для исследователя.
В программе MatLab линейные системы в пространстве состояний являются
частным случаем LTI (Linear Time-Invariant, линейных стационарных) систем и называются
SS (State Space, в пространстве состояний) моделями.
Контрольные вопросы:
1. Модель вход- состояние-выход (ВСВ)?
2. Вектор состояния и вектор входных сигналов?
3. Системы с одним входом и одним выходом?
12-Лекция
Изображение системы автоматического управления в пространстве. Таблица
переменных состояния
План:
1. Понятие пространство состояний
2. Переходная матрица состояния
3. Изображение системы автоматического управления в пространстве
Пространство состояний ― конечномерное пространство, ко- торому принадлежит
вектор состояния обыкновенного дифферен- циального уравнения в форме Коши.
Линеаризация ― выделение из векторного дифференциального уравнения в форме
Коши линейной части с помощью матриц Якоби (производных Фреше) при малых
отклонениях относительно вы- бранной (номинальной, рабочей) траектории «вход —
состояние».
Переходная матрица состояния ― фундаментальная матрица решений векторного
линейного однородного дифференциального уравнения с переменными коэффициентами,
которая позволяет перейти из начального состояния в любое другое в пространстве
состояний.
Матричная экспонента ― переходная матрица состояния ви-
да e At для линейного однородного дифференциального уравнения
с постоянными коэффициентами x˙ Ax, x ℝ .
Формула Коши ― частное решение векторного линейного неоднородного
дифференциального уравнения с переменными коэффициентами в виде интеграла от
произведения переходной матрицы состояния и функции в правой части уравнения.
Преобразование подобия ― переход к другому базису в пространстве состояний линейного
векторного дифференциального уравнения посредством невырожденной замены
координат, при которой передаточная функция системы остается неизменной.
Масштабирование ― приведение входных и выходных сигналов модели системы к
безразмерному виду, когда модуль каждо- го масштабированного скалярного сигнала не
превышает единицы.
Звено, охваченное обратной связью (рис. 2.16, a). Принято считать, что звено
охвачено обратной связью, если его выходной сигнал через какое-либо другое звено
подается на вход. При этом если сигнал у1 обратной связи вычитается из входного
воздействия у0, т.е. е1=у0–у1, то обратную связь называют отрицательной. Если сигнал у1
обратной связи складывается с входным воздействием у0, т.е. е1=у0+у1 то обратную связь
называют положительной.
Разомкнем обратную связь перед сравнивающим звеном (рис. 10.4, а). Тогда
получим цепь из двух последовательно соединенных звеньев. Поэтому передаточная
функция W разомкнутой цепи (рис. 10.4, а) равна произведению передаточной функции Wn
прямой цепи и передаточной функции Wo c обратной связи: W = WnWo.c (рис. 10.4, б).
Передаточная функция Ws замкнутой цепи с отрицательной обратной связью–звена,
охваченного отрицательной обратной связью, – равна передаточной функции прямой цепи,
деленной на единицу плюс передаточная функция разомкнутой цепи:
W3 Wn /(1 W )
Для вывода этой формулы выпишем уравнения для каждого звена:
y Wn e1 ; y1 Wo.c y; e1 y0 y1
В этой системе последнее уравнение –уравнение сравнивающего звена –называют
уравнением замыкания.
Исключив переменные е1 и у1 из приведенной системы, получим уравнение
у=Wn(у0–Wo.cy) или (1 + Wn Wo.c)y=Wny0. Отсюда
W3 Wn /(1 WnWo.c ) Wn /(1 W )
Если обратная связь положительна, то аналогично получим
W3 Wn /(1 W ).
Передаточная функция замкнутой цепи с положительной обратной связью равна
передаточной функции прямой цепи,
а)
y0
а)
W1
y
Wп
y1
y2
y1
y2
y0
e1
Wо.с
W2
б)
Wn
б)
y0
yп
y0
y
в)
y
W
W
y0
(+)
Рис 10.3
y1
e1
Wn
y
Рис10.4
деленной на единицу минус передаточная функция разомкнутой цепи. Если
передаточная функция Wо,c=1, то обратная связь называется единичной и структурная
схема изображается так, как показано на рис. 2.16, в. Передаточная функция W 3 при этом
принимает вид W3=Wn/(l+Wn) при отрицательной обратной связи и W3 = Wn(l – Wn) при
положительной обратной связи.
При преобразовании структурных схем возникает необходимость переноса и
перестановки сумматоров и узлов. Рассмотрим, какие изменения в схеме при этом нужно
произвести.
4. Перенос сумматора (рис. 10.5). Легко показать, что при переносе сумматора по
ходу сигнала необходимо добавить звено с передаточной функцией, равной передаточной
функции звена, через которое переносится сумматор (рис. 10.5, а). Если сумматор
переносится против хода сигнала, то необходимо добавить звено с передаточной функцией,
равной обратной передаточной функции звена, через которое переносится сумматор (рис.
10.5, б).
При переносе сумматора возникают неэквивалентные участки линии связи. Эти
участки на рис. 10.5 заштрихованы.
Контрольные вопросы:
1. Изображение системы автоматического управления в пространстве?
2. Преобразование подобия что означает?
3. Приведение входных и выходных сигналов модели системы к безразмерному виду
13-Лекция
Связь "вход – состояние – выход" и понятие пространства состояний
План:
1. ТАУ Модели "вход – состояние – выход"
2. Понятие пространства состояний
3. Канонические формы уравнений состояния
ТАУ Модели "вход – состояние – выход"
ТАУ предлагает два основных подхода к анализу и синтезу линейных САУ. Первый
базируется на структурных схемах и ПФ отдельных элементов и всей системы. В связи с
этим его часто называют операторно-структурным. Другой его особенностью является
использование физических величин в качестве переменных. Подробно этот подход
рассмотрен при изучении ММ типа "вход – выход".
Второй подход отличается описанием САУ системой ОДУ первого порядка,
составленных относительно переменных состояния. Переменные состояния при таком
описании САУ аналогичны обобщенным координатам, используемым в теоретической
механике. Сам подход к исследованию САУ получил название метода пространства
состояний или метода переменных состояния.
Понятие пространства состояний
Согласно методу пространства состояний (МПС) все переменные величины,
характеризующие САУ, разделяют на три группы:
1) входные переменные или входные (управляющие) воздействия um;
2) выходные
воздействия;
3) переменные
поведение САУ.
переменные yp,
(координаты)
характеризующие
состояния xn,
реакцию
САУ
характеризующие
на входные
динамическое
Взаимосвязь названных переменных поясняют схемой САУ, на которой систему
изображают в виде "черного ящика".
Отдельные части САУ характеризуют ПФ W1(s) и W2(s). Как следует из схемы,
переменные состояния xn являются промежуточными величинами. Их относят к
содержимому "черного ящика". Следовательно, они скрыты от прямого наблюдения. Кроме
того, переменные состояния не всегда являются физическими величинами. Иногда для
удобства математического моделирования САУ целенаправленно отказываются от
физического содержания переменных состояния. Поэтому в общем случае xn(t) являются
абстрактными переменными. Однако они должны однозначно выражаться через
физические величины yp(t).
В общем случае исследуемую САУ считают многомерной . Для упрощения работы с
многомерными величинами их представляют в векторно-матричном виде. Так,
совокупность входных переменных представляют в виде вектора входа совокупность
выходных переменных – в виде вектора выхода а совокупность переменных состояния – в
виде вектора состояния
Согласно МПС множество всех значений, которые может принять вектор входа U в
момент времени t, образует пространство входа исследуемой САУ. Аналогично,
множество всех значений, которые может принять вектор выхода Y в момент времени t,
образует пространство выхода, а множество всех значений, которые может принять вектор
состояния X в момент времени t, образует пространство состояний САУ.
Как было отмечено, векторно-матричные уравнения описывают многомерную САУ.
Эта же совокупность уравнений служит ММ одномерной САУ, т.е. системы с одним входом
и одним выходом. При использовании МПС такие САУ часто называют системами
со скалярным входом и выходом, так как входная и выходная величины являются
скалярными. Уравнения состояния и выхода одномерной системы имеют вид
Канонические формы уравнений состояния
Разработано множество эквивалентных форм (представлений) уравнений состояния,
различающихся между собой видом матриц A, B и C. Одни из форм используются чаще, так
как обладают в некоторых случаях известными преимуществами перед другими. Такие
формы записи уравнений состояния называются каноническими. Считают, что удобство
канонических форм заключается в следующем. Во-первых, канонические представления
матриц обеспечивают минимальное количество ненулевых элементов, что заметно
упрощает вычисления. Во-вторых, канонические представления приводят к простым
алгоритмам синтеза оптимальных регуляторов замкнутых САУ /3/.
Таким образом, в результате приведения уравнений к канонической форме более
простую структуру принимают две из трех матриц: A и B (управляемые формы)
или A и C (наблюдаемые формы). Управляемые канонические формы используют при
синтезе регулятора, а наблюдаемые канонические формы – при синтезе наблюдателя.
Первая управляемая каноническая форма
Первой управляемой канонической формой называют специальные матрицы
Очевидно, что коэффициенты характеристического полинома A(s) составляют
последний столбец матрицы A. Матрицы такого вида называют матрицами Фробениуса.
Элементы таких матриц определяют без вычислений. Характеристический многочлен A(s)
совпадает со знаменателем ПФ системы управления. Корни данного многочлена
определяют устойчивость и качество переходных процессов в САУ.
Матрица входа B рассматриваемого канонического представления также имеет
специальный вид. Вследствие скалярного входного воздействия матрица B представляет
собой вектор-столбец, элементы которого также не требуется вычислять.
Принятые переменные состояния являются выходными сигналами интеграторов.
Первую управляемую каноническую форму называют также канонической формой
дуальной фазовой переменной /20/.
Управляемое каноническое представление
Второй управляемой канонической формой или управляемым каноническим
представлением (УКП) называют специальные матрицы
Очевидно, что коэффициенты характеристического полинома A(s) составляют
последнюю строку матрицы коэффициентов A. Коэффициенты характеристического
полинома таких матриц определяют без вычислений, так как матрица коэффициентов (2.88)
является матрицей Фробениуса.
Матрица входа B рассматриваемой канонической формы также имеет специальный
вид. Вследствие скалярного входного воздействия матрица B представляет собой векторстолбец. Его элементы также не требуется вычислять. К матрице C таких специальных
требований не предъявляют. В рассматриваемом случае C = [1 0 0 … 0].
Рассматриваемое УКП отличается также переменными состояния. В качестве
последних принимают выходную (управляемую) величину y(t) и (n – 1) ее производных
Такие переменные являются нормальными (2.65). В связи с этим рассматриваемую
вторую управляемую каноническую форму или УКП называют нормальной формой. Таким
образом, одномерная САУ описывается уравнениями состояния в данной канонической
форме (УКП)
Очевидно, что первые n уравнений системы имеют нормальную форму Коши и
совпадают с системой ОДУ (2.68).
Полученная ММ системы управления может быть изображена в виде структурной
схемы, представленной на рисунке 2.32.
В более общем случае, когда вектор выхода C = [ c1 c2 … cn ], структурная схема
САУ приобретает каноническую форму с общим выходом. Такую САУ описывают
уравнениями состояния
Наблюдаемое каноническое представление
Если САУ описывается неоднородным дифференциальным уравнением с
производными входной величины в правой части, для приведения ММ к первой
наблюдаемой канонической форме (НКП) принимают другие переменные состояния X. Их
вводят следующими уравнениями состояния
Каноническая форма Жордана
Это представление уравнений состояния также отличается специальным видом
матрицы коэффициентов A, которая в данном случае имеет форму Жордана
Как видно, матрица коэффициентов A является диагональной. Это свойство
матрицы упрощает вычисления, так как матрица Жордана имеет наибольшее количество
нулевых элементов. Матрицы входа и выхода в рассматриваемом представлении являются
векторами соответственно и C = [c1 c2 … cn], а D – скаляром вида D = d0.
Следовательно, одномерную САУ описывают уравнениями состояния и выхода
вида
Управляемое каноническое представление является дуальным ко второму
наблюдаемому каноническому представлению дуальной системы.
Контрольные вопросы:
1. Как еще называют первую управляемую каноническую форму?
2. Матрицы входа и выхода?
3. Как можно упростить работу с многомерными величинами?
14-Лекция
Матрица перехода. Аналитический взгляд на получение переходной матрицы.
Получение изображение матриц переходов по схеме переменных состояния.
План:
1. Простейшие типовые звенья
2. Управляемое каноническое представление
3. ТАУ Модели "вход – состояние – выход"
Звеном системы называется ее элемент, обладающий определенными свойствами в
динамическом отношении. Звенья систем регулирования могут иметь разную физическую
основу (электрические, пневматические, механические и др. звенья), но относится к одной
группе. Соотношение входных и выходных сигналов в звеньях одной группы описываются
одинаковыми передаточными функциями.
Простейшие типовые звенья:
усилительное,
интегрирующее,
дифференцирующее,
апериодическое,
колебательное,
запаздывающее.
1) Усилительное звено.
Звено усиливает входной сигнал в К раз. Уравнение
звена у = К*х, передаточная функция W(s) = К. Параметр К
называется коэффициентом усиления.
у
К
t
Выходной
Рис. 1 сигнал такого звена в точности повторяет входной сигнал, усиленный в К
раз (см. рис. 1).
Примерами таких звеньев являются: механические передачи, безынерционные
усилители, жесткий механический рычаг, редуктор, потенциометр, электронный усилитель
и т.п. др.
2) Интегрирующее.
2.1) Идеальное интегрирующее.
Выходная величина идеального интегрирующего звена пропорциональна интегралу
входной величины.
t
y K x ( t )dt ; W(s) =
у
0
t
Рис. 2
K
s
При подаче на вход звена воздействия выходной сигнал
постоянно возрастает (см. рис. 2).
Это звено астатическое, т.е. не имеет установившегося режима. Интегрирующее
звено неограниченно "накапливает" входное воздействие. Примеры интегрирующих
звеньев: электродвигатель, поршневой гидравлический двигатель, емкость и т.п. Введение
его в САУ превращает систему в астатическую, то есть ликвидирует статическую ошибку.
2.2) Реальное интегрирующее.
Передаточная функция этого звена имеет вид:
у
W(s) =
t
Рис. 3
K
.
s(Ts 1)
Переходная характеристика в отличие от идеального звена
является кривой (см. рис. 3).
Примером интегрирующего звена является двигатель постоянного тока с
независимым возбуждением, если в качестве входного воздействия принять напряжение
питания статора, а выходного - угол поворота ротора.
3) Дифференцирующее.
3.1) Идеальное дифференцирующее.
Выходная величина пропорциональна производной по времени от входной:
yK
dx( t )
;
dt
W(s) = K*s
При ступенчатом входном сигнале выходной сигнал представляет собой импульс (функцию). Идеальное дифференцирующее звено реализовать невозможно, так как
величина всплеска выходной величины при подаче на вход единичного ступенчатого
воздействия всегда ограничена. На практике используют реальные дифференцирующие
звенья, осуществляющие приближенное дифференцирование входного сигнала.
3.2) Реальное дифференцирующее.
у
t
Идеальные дифференцирующие звенья физически не
реализуемы. Большинство объектов, которые представляют
собой дифференцирующие звенья, относятся к реальным
дифференцирующим звеньям. Переходная характеристика и
передаточная функция этого звена имеют вид:
Рис. 4
4) Апериодическое (инерционное).
W(s) =
Ks
.
Ts 1
Этому звену соответствуют ДУ и ПФ вида:
T
dy
y Kx ;
dt
W(s) =
K
.
Ts 1
Определим характер изменения выходной величины этого звена при подаче на вход
ступенчатого воздействия величины х0.
Изображение ступенчатого воздействия: X(s) =
x0
. Тогда изображение выходной
s
величины:
Y(s) = W(s) X(s) =
K x0
1
= K x0
.
Ts 1 s
s(Ts 1)
Разложим дробь на простые:
1
A
T
1
B As BTs B 1
1
=
+
=
= = s Ts 1 s s 1
s(Ts 1) Ts 1 s
s(Ts 1)
T
1
Оригинал первой дроби по таблице: L-1{ } = 1, второй:
s
-1
L {
1
s
1
T
}= e
t
T
у
.
К
Тогда окончательно получаем:
t
t
Рис. 5
y(t) = K x0 (1 - e T ).
Постоянная Т называется постоянной времени.
Большинство тепловых объектов являются апериодическими звеньями. Например,
при подаче на вход электрической печи напряжения ее температура будет изменяться по
аналогичному закону (см. рис. 5). Примеры апериодического звена: термопара,
электродвигатель, четырехполюсник из сопротивления и емкости или сопротивления и
индуктивности.
5) Колебательное звено имеет ДУ и ПФ вида
y
d2y
dy
T
T
y Kx ,
1
dt 2
dt
T1< 2T2
2
2
K. x0
T1 2T2
t
Рис. 6
W(s) =
K
.
T s T1s 1
2 2
2
При подаче на вход ступенчатого воздействия амплитудой х0 на переходная кривая
будет иметь один из двух видов: апериодический (при Т1 2Т2) или колебательный (при
Т1 < 2Т2).
6) Запаздывающее.
y(t) = x(t - ),
W(s) = e-s.
Выходная величина у в точности повторяет входную величину х с некоторым
запаздыванием . Примеры: движение груза по конвейеру, движение жидкости по
трубопроводу.
Контрольные вопросы:
1. Что представляет собой передаточная функция непрерывной системы?
2. Какие простейшие типовые звенья вы знаете?
3. Приведите пример интегрирующего звена?
15-Лекция
Понятие устойчивости. Общая постановка задачи устойчивости по А.М. Ляпунову.
Теорема А.М. Ляпунова
План:
1. Понятие устойчивости
2. Общая постановка задачи устойчивости по А. М. Ляпунову
3. Теорема А. М. Ляпунова об устойчивости движения по первому приближению
Понятие устойчивости
На любую автоматическую систему всегда действуют различные внешние
возмущения, которые могут нарушить ее нормальную работу. Правильно спроектированная система должна устойчиво работать при всех внешних возмущениях.
В простейшем случае понятие устойчивости системы связано со способностью ее
возвращаться (с определенной точностью) в состояние равновесия после исчезновения
внешних сил, которые вывели ее из этого состояния. Если система неустойчива, то она не
возвращается в состояние равновесия, из которого ее вывели, а либо удаляется от него, либо
совершает вокруг него недопустимо большие колебания.
Наблюдения показывают, что некоторые положения равновесия системы устойчивы
к небольшим возмущениям, а другие принципиально возможные равновесные положения
практически не могут быть реализованы.
Наглядно устойчивость равновесия представлена на рис. 15.1, где изображен шар,
расположенный в некотором углублении (рис. 15.1, а), на некоторой выпуклой поверхности
(рис. 15.1, б), на плоскости (рис. 15.1, в).
Положение равновесия шара характеризуется точкой Ао. В случае, изображенном на
рис. 15.1, а, при всяком отклонении шара от положения равновесия, например в точку Al он
будет стремиться снова возвратиться к положению равновесия – в точку А0 (при отсутствии
сил трения) или к некоторой конечной области, окружающей положение равновесия,
например в точку А2 (при наличии сил трения). Такое положение равновесия устойчиво.
Случай, изображенный на рис. 15.1, б, соответствует неустойчивому положению
равновесия. Рис. 15.1, в соответствует безразличному равновесию. На рис. 3.1,г состояние
равновесия устойчиво лишь до тех пор, пока отклонение не вышло за некоторую границу,
определяемую, например, точкой В. Выйдя за эту границу, шар уже не вернется в точку Ао,
а будет двигаться вправо от точки В либо все время удаляясь, либо до нового состояния
равновесия в зависимости от формы поверхности, т. е. в конечном счете в зависимости от
уравнений движения шара.
Поэтому в общем случае, рассматривая нелинейные системы, вводят понятие
устойчивости «в малом», «в большом» «в целом». Система устойчива «в малом», если
констатируют лишь факт наличия области устойчивости, но не определяют каким-либо
образом ее границы. Систему называют устойчивой «в большом», когда определены границы области устойчивости, т. е. определены границы области начальных отклонений, при
которых система возвращается в исходное состояние, и выяснено, что реальные начальные
отклонения принадлежат этой области. В том случае, когда система возвращается в
исходное состояние при любых начальных отклонениях, систему называют устойчивой «в
целом». Устойчивость «в целом» для определенного класса нелинейностей называют
абсолютной» устойчивостью.
Рис.15.1
Так, например, случай, изображенный на рис. 15.1, а, соответствует устойчивости «в
целом», а случай, изображенный на рис. 15.1, г, может соответствовать либо устойчивости
«в большом», либо устойчивости «в малом». Очевидно, что система, устойчивая «в целом»,
будет устойчива «в большом» и «в малом»; система, устойчивая «в большом», будет
устойчива и «в малом».
На рис. 15.1, д изображено еще одно принципиально возможное для нелинейных
систем состояние равновесия, которое называют полуустойчивым.
Для того чтобы дать определение устойчивости равновесия, вводят понятие о
невозмущенном состоянии равновесия, соответствующем состоянию покоя в точке А0 на
рис. 15.1, а, и возмущенном состоянии, соответствующем, например, точке А1 в которую
внешняя сила привела шар и затем прекратила свое действие. Система будет устойчивой,
если из возмущенного состояния она перейдет в некоторую заданную область, окружающую невозмущенное состояние равновесия.
В рассмотренном выше примере с шаром вопрос об устойчивости решается
довольно просто. Однако следует заметить, что в общем случае далеко не всегда ясно, при
каких условиях равновесное положение системы будет устойчивым.
Понятие устойчивости можно распространить и на более общий случай, когда в
качестве невозмущенного состояния рассматривают не положение равновесия системы, а
ее движение, например движения системы по некоторой наперед заданной траектории.
Допустим, что заданное движение системы при отсутствии возмущений должно
определяться некоторым законом изменения независимых координат y1 (t ), y 2 (t ),......, y n (t ).
По аналогии со случаем равновесия положения, заданное движение называют
невозмущенным движением. Внешние возмущения, действующие на систему, вызовут
отклонение действительного движения системы от заданного. Действительное движение
системы называют возмущенным движением. Пусть действительное движение системы
определяется независимыми координатами y1 (t ), y 2 (t ),......, y n (t ) . В общем случае
y1 (t ) y1 (t ) y 2 (t ) y 2 (t ),........, y n (t ) y n (t ) .
Заданное невозмущенное движение будет устойчивым, если после приложения
внешних сил {возмущений), которые затем снимают, возмущенное движение по истечении
некоторого времени войдет в заданную область Iyi (t ) yi (t ) i , где i =const– заданные
величины, i = 1,2,...,n.
Чтобы проиллюстрировать сказанное, предположим, что невозмущенное движение
происходит по траектории А, а возмущенное движение происходит по траектории Б (рис.
15.2, а). Возьмем на этих траекториях две произвольные точки NA и NБ, отвечающие одному
и тому же моменту времени t. При устойчивом движении траектория Б должна быть близка
к траектории А.
Рис.15.2
Следует заметить, однако, что близость траекторий А и Б является необходимым
условием устойчивости движения, но недостаточным. Действительно, расстояние между
точками NA и NБ, отвечающими одному и тому же моменту времени, может возрастать не
только для расходящихся, но и для близких траекторий (рис. 15.2, б).
Общая постановка задачи устойчивости по А. М. Ляпунову
Впервые строгое определение устойчивости было дано русским ученым А. М.
Ляпуновым в 1892 г. в работе «Общая задача об устойчивости движения». Отсутствие
такого определения часто приводило к недоразумениям, так как движение, устойчивое в
одном смысле, может оказаться неустойчивым при другом понимании этих слов, и
наоборот. Определение устойчивости А. М. Ляпунова оказалось настолько удачным и
наилучшим образом удовлетворяющим многим техническим задачам, что оно в настоящее
время принято как основное.
Пусть
движение
системы
автоматического
управления
дифференциальными уравнениями, которые могут быть приведены к виду
описывается
dy i / dt Yi ( y1 , y 2 ,...., y n , t ).
(15.1)
где y i -вещественные переменные, характеризующие состояние системы управления
(обобщенные координаты); Yi – известные функции переменных y1 , y2 ,...., yn и времени t,
удовлетворяющие условиям существования и единственности решения.
Исходное состояние системы при t=t0 однозначно определяется начальными
значениями переменных y i которые обозначим y1 0, y 20 ,...., y n 0 .
Каждой совокупности начальных
единственное решение (3.1) для всех t >t0
значений
y1 0, y 20 ,...., y n 0 соответствует
yi yi ( y10 , y 20 ,....., y n 0 , t ).
(15.2)
Решение (15.2) описывает какое-либо движение системы, определяемое исходным
состоянием.
Некоторое вполне определенное движение системы, подлежащее исследованию на
устойчивость, называют невозмущенным движением.
Заметим, что выбор невозмущенного движения является произвольным. Это может
быть любое возможное движение системы, как установившееся, так и неустановившееся.
Допустим, что в качестве невозмущенного движения выбрано такое, которое описывается
заданными функциями времени
y1 y1 (t ); y 2 y 2 (t );.........; y n y n (t )
(15.3)
Предположим, что функции
дифференциальных уравнений (3.1), т. е.
yi yi (t )
являются
частным
dyi (t ) / dt Yi ( y1 , y2 ,....., yn , t ),
решением
(15.4)
удовлетворяющим начальным условиям при t=t0
y1 y1 (t 0 ); y 2 y 2 (t 0 );.........; y n y n (t 0 ) .
(15.5)
В частном случае, когда параметры системы не изменяются со временем и функции
Yi не зависят явно от t, движения (3.3) являются установившимися. Им отвечают решения
yi = const,
(15.6)
Yi ( y1 , y 2 ,......, y n ) 0 .
(15.7)
служащие корнями уравнений
Изменим условия (15.5), дав начальным значениям переменных y1 , y2 ,......, yn небольшие
по модулю приращения
1 , 2 ,......, n , т. е. пусть при t=t0
y1 y1 (t 0 ) 1 ; y 2 y 2 (t 0 ) 2 ;.........; y n y n (t 0 ) n .
(15.8)
Движение системы, отвечающее измененным начальным условиям (15.8), называют
возмущенным движением. Другими cловами, возмущенным движением системы называют
всякое иное движение системы, отличное от невозмущенного.
Введем новые переменные
xi yi (t ) yi (t ) ,
(15.9)
равные разности переменных yi в возмущенном и невозмущенном движении. Переменные
xi называют отклонениями или вариациями величин yi . Если все отклонения равны нулю
х1=0; х2=0; ...;хn=0,
(15.10)
то возмущенное движение yi(t) будет совпадать с невозмущенным движением y i (t ) , т. е.
невозмущенному движению отвечают нулевые значения переменных хi.
Пусть при t=t0 переменные xi принимают какие-либо начальные значения xi0, из
которых по крайней мере одно не равно нулю:
xi xi 0 i .
(15.11)
Начальные значения отклонений (3.11) называют возмущениями.
А.М. Ляпуновым было дано следующее определение устойчивости: невозмущенное
движение называют устойчивым по отношению к переменным хi, если при всяком
произвольно заданном положительном числе , как бы мало оно ни было, можно выбрать
другое такое положительное число ( ) , что при всяких возмущениях xi0,
удовлетворяющих условию
n
xi20
(15.12)
i 1
и при любом t t0 будет выполняться неравенство
n
xi2 (t ) ,
(15.13)
i 1
в противном случае движение неустойчиво.
Практически устойчивость данного невозмущенного движения означает, что при
достаточно малых начальных возмущениях возмущенное движение будет сколь угодно
мало отличаться от невозмущенного движения. Если невозмущенное движение
неустойчиво, то возмущенное движение будет отходить от него, как бы малы ни были
начальные возмущения.
Если невозмущенное движение устойчиво и при этом любое возмущенное движение
при достаточно малых начальных возмущениях стремится к невозмущенному движению,
т. е.
lim xi (t ) 0 ,
t
(15.14)
то невозмущенное движение называют асимптотически устойчивым .
При асимптотической устойчивости изображающая точка с течением времени
должна неограниченно стремиться к началу координат, не выходя из сферы .
Отметим некоторые особенности определения устойчивости по А. М. Ляпунову. Вопервых, предполагают, что возмущения налагаются только на
начальные
условия,
иначе
говоря,
возмущенное
движение
происходит
при тех же силах (источниках энергии), что и невозмущенное движение.
Во-вторых, устойчивость рассматривают на бесконечно большом промежутке времени. Втретьих, возмущения предполагаются малыми. Несмотря на эти ограничения, определение
А.М. Ляпунова устойчивости движения является эффективным и плодотворным в
приложениях.
Теорема А. М. Ляпунова об устойчивости движения по первому приближению
Когда известно общее решение дифференциальных уравнений движения (15.1),
можно непосредственно определить значения переменных yi(t) в возмущенном движении,
составить вариации xi yi (t ) yi (t ) и, исследуя их, решить вопрос об устойчивости
невозмущенного движения yi (t ) . Однако, как правило, исследование устойчивости
движения производят не путем анализа общего решения, а методами, основанными на
качественном анализе дифференциальных уравнений возмущенного движения, которым
удовлетворяют отклонения (вариации) xi.
Чтобы вывести уравнения возмущенного движения, найдем из (15.9) переменные
yi (t ) yi (t ) xi (t ) и подставим эти значения yi (t ) в дифференциальные уравнения
движения (3.1).
Тогда
dy i (t ) / dt dxi (t ) / dt Yi ( y1 x1 , y 2 x2 ,......, y n xn )
(15.15)
Если правые части уравнений (3.15) допускают разложение в степенные ряды Тейлора, то
после этого разложения по степеням xi получим
dyi dxi (t )
dY
Yi ( y1 , y 2 ,......., y n , t ) ( i ) 0 x1 ..........
dt
dt
dx1
dY
( i ) 0 x n Ri ( x1 , x 2 ,......., x n ),
dx n
(15.16)
где Ri ( x1 , x2 ,.......,xn ) – совокупность членов, зависящих от отклонений xi в степени выше
первой.
Учитывая (3.4), будем иметь
dxi (t ) / dt ai1 x1 ai 2 x2 ........ ain xn Ri ( x1 , x2 ,......,xn )
(15.17)
В уравнениях (3.17) коэффициенты
aik (
dYi
) x 0
dxk k
(15.18)
в общем случае являются функциями времени t; в частности, они могут быть постоянными.
В дальнейшем, если не будет оговорено особо, будем считать коэффициенты aik
постоянными.
Уравнения (15.17) называют дифференциальными уравнениями возмущённого
движения.
Если отклонения xi достаточно малы, то, пренебрегая Ri ( x1 , x2 ,......,xn ) , получим
линеаризованные уравнения
axi / dt ai1 x1 ai1 x1 ....... ain xn , i 1,2,.....n.
(15.19)
называемые уравнениями первого приближения.
Во многих случаях устойчивость движения исследуют по уравнениям первого
приближения. Это объясняется не только простотой этого метода, но также и тем, что
знания процессов, происходящих в реальных системах, позволяют надежно определять
только первые линейные члены. Однако на основании уравнений первого приближения
можно дать иногда неверное заключение об устойчивости движения. Поэтому, естественно,
возникает вопрос об определении условий, при выполнении которых по уравнениям
первого приближения можно дать правильные ответы об устойчивости движения. Эту исключительно важную и принципиальную для теории автоматического управления задачу
впервые поставил и решил А. М. Ляпунов.
Системе уравнений (15.19) соответствует характеристическое уравнение, которое
можно записать следующим образом:
D( s)
a11 s
a12
....
a1n
a21
a22 s
....
a2 n
.......
........
.......
......
an1
an 2
........ ann s
0
(15.20)
Из (3.20) можно найти его корни si где ( i=1,2,...,n, которые в общем случае имеют
вид si i ji , где i - и i – вещественные и мнимые части корней соответственно.
Для исследования устойчивости систем по их линеаризованным уравнениям
принципиально важны следующие теоремы А. М. Ляпунова, которые приведем без
доказательства.
Теорема 1. Если вещественные части всех корней si характеристического уравнения
(3.20) первого приближения отрицательны, то невозмущенное движение асимптотически
устойчиво.
Теорема 2. Если среди корней si характеристического уравнения (15.20) первого
приближения имеется хотя бы один корень с положительной вещественной частью, то
невозмущенное движение неустойчиво.
Если среди корней характеристического уравнения имеется один или несколько
нулевых корней, а вещественные части остальных корней отрицательны, то этот случай
называют критическим. Как показал Ляпунов, в критическом случае устойчивость
(неустойчивость) невозмущенного движения не может быть оценена по уравнениям
первого приближения, так как она зависит от вида нелинейной функции R i (х1, х2,..., хn), и
поэтому в этом случае требуется рассмотрение дифференциальных уравнений
возмущенного движения (15.17) в их исходном виде.
Теоремы Ляпунова имеют весьма важное значение, так как они позволяют судить об
устойчивости нелинейных систем по их линеаризованным уравнениям (уравнениям
первого приближения).
Условия устойчивости линейных систем автоматического управления
Покажем, как на основе изложенного выше определения устойчивости А. М.
Ляпунова можно найти условия устойчивости линейных (линеаризованных) систем
автоматического управления.
Дифференциальное уравнение линейной системы автоматического управления,
записанное для регулируемой выходной величины х(t) при наличии управляющего
воздействия g(t), имеет вид
(a0 p n a1 p n1 ..... an ) x(t ) (b0 p m b1 p m1 ..... bm ) g (t )
(15.21)
где a0 , a1 ,.....,an и b0 , b1 ,.....,bm – постоянные коэффициенты, а р=d/dt–оператор
дифференцирования.
Изменение регулируемой величины х(t) при произвольном внешнем воздействии
g(t) представляет собой решение уравнения (3.21):
x(t ) xb (t ) xñb (t )
(15.22)
В (15.22) первое слагаемое xb (t ) – вынужденная составляющая, имеющая тот же
характер, что и правая часть уравнения (15.21). Она определяется как частное решение
неоднородного дифференциального уравнения (15.21) с правой частью:
(a0 p n a1 p n1 ..... an ) xb (t ) (b0 p m b1 p m1 ..... bm ) g (t )
(15.23)
Второе слагаемое xñb (t ) –свободная (переходная) составляющая, которая определяется
общим решением однородного дифференциального уравнения (15.21) без правой части:
(a0 p n a1 p n1 ..... an ) xcb (t ) 0
(15.24)
Обычно в теории автоматического управления интересуются устойчивостью
вынужденной составляющей xb (t ) переходного процесса. Поэтому за невозмущенное
движение системы необходимо принять вынужденную составляющую переходного
процесса xb (t ) . Тогда возмущенным движением будет любое возможное в системе
изменение регулируемой величины х(t), а отклонением или вариацией– свободная
составляющая xcb (t ) x(t ) xb (t ) .
Возмущениями, по А. М. Ляпунову, являются начальные значения xcb , которые
возникли в момент t=t0 под действием внезапно подействовавших дополнительных
внешних сил, т.е. начальные значения xcb 0 . Дифференциальными уравнениями
возмущенного движения первого приближения в данном случае будут уравнения (15.24).
В соответствии с определением устойчивости по А. М. Ляпунову система будет
асимптотически устойчивой, если с течением времени при t свободная составляющая
будет стремиться к нулю, т. е. xcb (t ) 0 . Чтобы найти эту составляющую, необходимо
решить дифференциальное уравнение (3.24):
d n xcb (t )
d n1 xcb (t )
a0
a1
...... an xcb (t ) 0
dt n
dt n1
Решение уравнения (15.25) находят как
(15.25)
xcb (t ) Ce st . Дифференцируя это
выражение n раз и подставляя в (15.25), после сокращения на общий множитель Ce
получаем
a0 s n a1s n1 ..... an 0
st
(15.26)
Полученное алгебраическое уравнение (15.26) называют характеристическим
уравнением. Его корни sl, s2,.....,sn будут определять характер переходного процесса в
системе. Нетрудно заметить, что по своему виду левая часть уравнения (15.26) совпадает с
дифференциальным оператором при выходной величине в уравнении (15.21), поэтому
характеристическое уравнение получают обычно, приравнивая к нулю дифференциальный
оператор при выходной величине в исходном дифференциальном уравнении (15.21), т. е.
a0 p n a1 p n1 ..... an 0
(15.27)
Следует заметить, однако, что в характеристическом уравнении (15.27), р=s означает
уже не символ дифференцирования, а некоторое комплексное число.
Рис.15.4
Решение характеристического уравнения степени n содержит n корней. Корни
характеристического уравнения обыкновенного линейного дифференциального уравнения
с постоянными коэффициентами могут быть вещественными, комплексными попарно
сопряженными, мнимыми попарно сопряженными, нулевыми. В общем случае
s i i j i
(15.28)
На рис. 15.4 показаны возможные положения корней в комплексной плоскости
корней s при
s1 1 ; s2 2 j2 ; s3 2 j 2 ; s4 0; s5 5 ; s6 6 ;
s7 6 j6 .
Если все корни разные, то их называют простыми. Если среди корней есть
одинаковые, то их называют кратными.
Обычно корни с отрицательными вещественными частями принято называть
левыми, поскольку они в комплексной плоскости корней расположены слева от мнимой
оси, а корни с положительными вещественными частями – правыми корнями.
Условие устойчивости линейной системы формулируется следущим образом: для
того чтобы линейная система была асимптотически устойчива, необходимо и достаточно,
чтобы все корни ее характеристического уравнения (15.27) были левыми.
Вычисление корней просто лишь для характеристического уравнения первой и
второй степеней. Существуют общие выражения для корней уравнений третьей и четвертой
степеней, но эти выражения громоздки и практически малопригодны. Общие выражения
для корней уравнений более высоких степеней вообще невозможно написать через
коэффициенты характеристического уравнения. Поэтому важное значение приобретают
правила, которые позволяют определять устойчивость системы без вычисления корней. Эти
правила называют критериями устойчивости. С помощью критериев устойчивости можно
не только установить, устойчива система или нет, но и выяснить, как влияют на
устойчивость те или иные параметры и структурные изменения в системе.
Критерии устойчивости могут быть разделены на алгебраические и частотные. С
математической точки зрения все критерии устойчивости эквивалентны, однако
целесообразный выбор того или иного критерия устойчивости при решении конкретных
задач позволяет провести исследование устойчивости наиболее простым путем.
Контрольные вопросы:
1. Дайте понятие устойчивости системы
2. Общая постановка задачи устойчивости по А. М. Ляпунову
3. Условия устойчивости линейных систем автоматического управления
16-ЛЕКЦИЯ
Алгебраические критерии устойчивости. Критерий устойчивости Рауса. Критерий
устойчивости Гурвица. Критерий устойчивости Льенара-Шипара.
План
1. Алгебраические критерии устойчивости. Критерий устойчивости Рауса.
2. Критерий устойчивости Гурвица
3. Критерий устойчивости Льенара-Шипара
Алгебраические критерии устойчивости позволяют судить об устойчивости системы
по коэффициентам характеристического уравнения
D( s) a0 s n a1s n 1 ....... an 0
(16.1)
Из алгебраических критериев устойчивости наиболее широкое распространение получили
критерии устойчивости Рауса и Гурвица.
Прежде чем познакомиться с ними, заметим, что необходимым условием устойчивости
системы
любого
порядка
является
положительность
всех
коэффициентов
характеристического уравнения (16.1):
а0>0; а1>0; …...; аn>0.
(16.2)
Действительно, в соответствии с теоремой Безу уравнение (3.30) можно представить
в виде произведения множителей, содержащих корни s1, s2,…., sn:
a0 ( s s1 )( s s2 )......(s sn ) 0
(16.3)
Если все корни характеристического уравнения будут отрицательны, то все
множители выражения (16.3) будут иметь вид
a0 ( s 1 )( s 2 )......(s n ) 0
где si i значения корней.
(16.4)
Производя перемножение в (16.4), получим (16.1), в котором все коэффициенты
будут определяться положительными членами
i
выражения (16.4), т. е. будут
положительны.
Если характеристическое уравнение (16.1) имеет комплексные корни
отрицательными вещественными частями, то оно может быть представлено в виде
с
a0 ( s 1 )( s 2 j2 )( s 2 j2 ).......(s n ) или
a0 ( s 1 ) ( s 2 22 ) .......(s n )
2
(16.5)
Уравнение (16.5) также приводится к виду уравнения (16.1) с положительными
коэффициентами.
Для систем первого и второго порядков необходимое условие устойчивости является
и достаточным условием устойчивости, поскольку в этом случае при положительных
коэффициентах характеристического уравнения все его корни являются левыми. Однако
для систем третьего и высших порядков положительность коэффициентов
характеристического уравнения является необходимым условием устойчивости, но не
достаточным. В этом случае все вещественные корни характеристического уравнения (если
они есть) левые, комплексные же корни могут быть и правыми.
Критерии устойчивости Рауса и Гурвица позволяют по коэффициентам
характеристического уравнения (3.30) без вычисления его корней сделать вывод об
устойчивости системы.
Критерий устойчивости Рауса. Этот критерий устойчивости был в 1877 г.
предложен английским математиком Э. Раусом в виде некоторого правила (алгоритма),
которое наиболее просто поясняется табл. 3.1.
В первой строке табл. 16.1 записывают в порядке возрастания индексов
коэффициенты характеристического уравнения (16.1), имеющие четный индекс:
a0 , a2 , a4 , a6 ....; во второй строке — коэффициенты (16.1) с нечетным индексом:
a1 , a3 , a5 , a7 ,.....
Любой из остальных коэффициентов таблицы определяют как
ck ,i ck 1,i 2 ri ck 1,i 1
(16.6)
где
ri c1,i 2 / c1, i 1
(16.7)
В (16.6) и (16.7) k— индекс, означающий номер столбца табл. 3.IT i — индекс,
означающий номер строки табл. 16.1.
Заметим, что число строк таблиц Рауса равно степени характеристического
уравнения плюс единица (n+1).
После того как таблица Рауса заполнена, по ней можно судить об устойчивости
системы. Условие устойчивости Рауса формулируется так: для того чтобы система
автоматического управления была'устойчива, необходимо и достаточно, чтобы
коэффициенты первого столбца таблицы Рауса имели один и тот же знак, т. е. при а0>0 были
положительными:
c11 a0 0; c12 a1 0; c13 0;........; c1n 1 0;
(16.8)
Таблица 16.1.
Коэффициент
i
Строка
Столбец
(i )
1
2
3
4
-
1
a0 c11
a2 c21
a4 c31
….
-
2
a1 c12
a3 c22
a5 c32
….
r3 a0 / a1
3
c13 a2 r3a3
c23 a4 r3a5
c33 a6 r3a7
….
r4 a1 / c13
4
c14 a3 r4c23
c24 a5 r4c33
c34 a7 r4c43
….
r5 c13 / c14
5
c15 c23 r5c24
c25 c33 r5c34
c35 c43 r5c44 ….
….
….
….
….
….
….
ri c1,i 2 / c1, i 1
i
c1, i c2, i 2
c2, i c3, i 2
c3, i c4, i 2
….
ri c2, i 1
ri c3, i 1
ri c4, i 1
….
….
….
….
….
….
Если не все коэффициенты первого столбца положительны, то система неустойчива,
а число правых корней характеристического уравнения равно числу перемен знака в первом
столбце таблицы Рауса.
Критерий Рауса особенно удобен, когда заданы числовые значения коэффициентов
характеристического уравнения (16.1). В этом случае определение устойчивости можно
выполнить довольно быстро даже при характеристических уравнениях высокого порядка.
Форма алгоритма, с помощью которого составляют таблицу Рауса, очень удобна для
программирования ЭВМ, поэтому критерий Рауса нашел широкое применение при
исследовании влияния на устойчивость либо коэффициентов характеристического
уравнения, либо отдельных параметров системы, не очень сложным образом входящих в
эти коэффициенты, с помощью быстродействующих ЭВМ.
Критерий устойчивости Гурвица. В 1895 г. немецким математиком А. Гурвицем
был разработан алгебраический критерий устойчивости в форме определителей,
составляемых из коэффициентов характеристического уравнения системы.
Из коэффициентов характеристического уравнения (3.30) строят сначала главный
определитель Гурвица
a1
a3
a5
a7
...
0
a0
a2
a4
a6
...
0
0
a1
a3
a5
...
0
0
a0
a2
a4 ...
..
...
...
...
... ...
.
0
0
0
0
n
(16.9)
an
Таблица 16.2.
Коэффициент
Стро
i
ка
Столбец (k )
1
2
3
4
(i )
-
1
a0 1
a2 21
a4 62
a6 100
-
2
a1 6
a3 44
a5 52
a7 0
r3 a 0 / a1
3
c13 21 0,167
c 23 62 0,167
c33 100 0,167
0
44 13,65
52 53,3
0 100
c14 44 0,44
c24 52 0,44
c34 0 0,44
53,3 20,6
100 8
0 0
c15 53,3 0,66
c25 100 0,66
8 48
0 100
1 / 6 0,167
r4 a1 / c13
4
6 / 13,65
0
0,44
r5 c13 / c14
5
13,65 / 20,6
0
0
0
0
0
0
0,66
r6 c14 / c15
6
20,6 / 48
c16 8 0,43
c26 0 0,43
100 35
0 0
0,43
r7 c15 / c16
7
c17 100
48 / 35
(1,37) 0
1,37
100
0
по следующему правилу: по главной диагонали определителя слева направо выписывают
все коэффициенты характеристического уравнения от a1 до аn в порядке возрастания индексов. Столбцы вверх от главной диагонали дополняют коэффициентами
характеристического уравнения с последовательно возрастающими индексами, а столбцы
вниз — коэффициентами с последовательно убывающими индексами. На место коэффициентов с индексами больше n (n-порядок характеристического уравнения) и меньше
нуля проставляют нули.
Отчеркивая в главном определителе Гурвица, как показано
диагональные миноры, получаем определители Гурвица низшего порядка:
1 a1; 2
a1
a3
a0
a2
a1
a3
a5
...
a1
a3
a5
a0
a2
a4
...
; 3 a0
a2
a1
a3
...
0
a1
a4 ; k 0
a3
.
.
...
.
.
.ak
пунктиром,
(16.10)
Номер определителя Гурвица определяется номером коэффициента по диагонали,
для которого составляют данный определитель. Критерий устойчивости Гурвица
формулируется следующим образом: для того чтобы система автоматического управления
была устойчива, необходимо и достаточно, чтобы все определители Гурвица имели знаки,
одинаковые со знаком первого коэффициента характеристического уравнения а0, т. е. при
а0 > 0 были положительными.
Таким образом, при а0>0 для устойчивости системы необходимо и достаточно
выполнения следующих условий:
1 a1 0;
a1
.............
a3 a5 ...
a0
a2
a4 ...
n 0
a1
a3 ...
.
.
.
.
0
0
0
...
a1 a3 a5
a a3
2 1
0 3 a0 a2 a4 0
a0 a 2
0 a1 a3
(16.11)
......................
..........................
0
0
0 0
.
an
Раскрывая, например, определители Гурвица для характеристических уравнений
первого, второго, третьего и четвертого порядков, можно получить следующие условия
устойчивости:
1) для уравнения первого порядка (n=1), т. е. а0s+а1=0, условия устойчивости
а0>0; a1>0;
(16.12)
2) для уравнения второго порядка (n=2), т. е. a0s2+a1s+a2=0, условия устойчивости
а0>0; а1>0; а2>0;
(16.13)
3) для уравнения третьего порядка (n=3), т. е. а0s+a1s2+a2s+a3=0, условия
устойчивости
a0>0; а1>0; а2>0; а3>0;
а1а2—а0а3>0;
(16.14)
(16.15)
4) для уравнения четвертого порядка (n=4), т. е. a0s4+a1s3+a2s2+a3s+a4=0, условия
устойчивости
a0>0; al>0; а2>0; а3>0; a4>0;
2
a3(a1a2-a0a3)— a1 a 4 >0.
(16.16)
(16.17)
Таким образом, необходимым и достаточным условием устойчивости для систем
первого
и
второго
порядков
является
положительность
коэффициентов
характеристического уравнения. Для уравнения третьего и четвертого порядков кроме положительности коэффициентов необходимо соблюдение дополнительных неравенств
(16.16) и (16.17).
При n 5 число подобных дополнительных неравенств возрастает, процесс
раскрытия определителей становится довольно трудоемким и громоздким. Поэтому
критерий устойчивости Гурвица обычно применяют при n 4 . При n 5 целесообразно
применять формулируемый ниже критерий устойчивости Льенара—Шипара либо при
использовании критерия устойчивости Гурвица переходить к численным методам с
использованием ЭВМ.
В последнем столбце главного определителя Гурвица (16.9) отличен от нуля только
один коэффициент аn, поэтому
n an n 1
(16.18)
Из (16.18), видно, что при аn>0 для проверки устойчивости системы достаточно
найти только определители Гурвица от 1 до n 1 . Если все определители Гурвица
низшего порядка положительны, то система находится на границе устойчивости, когда
главный определитель равен нулю:
n an n 1 .
(16.19)
Последнее равенство возможно в двух случаях: аn=0 или n 1 =0. В первом случае
система находится на границе апериодической устойчивости (один из корней характеристического уравнения равен нулю); во втором случае — на границе колебательной
устойчивости (два комплексно-сопряженных корня характеристического уравнения
находятся на мнимой оси).
Используя критерий Гурвица, можно при заданных параметрах системы принять за
неизвестный какой-либо один параметр (например, коэффициент усиления, постоянную
времени и т. д. ) и определить его предельное (критическое) значение, при котором система
будет находиться на границе устойчивости.
Следует заметить, что критерий Гурвица можно получить из критерия Рауса,
поэтому иногда критерий Гурвица называют критерием Рауса-Гурвица.
Критерий устойчивости Льенара-Шипара. Для исследования устойчивости
систем автоматического управления, имеющих порядок характеристического уравнения
n 5 , удобно применять одну из модификаций алгебраического критерия устойчивости
Гурвица, предложенную в 1914 г. П. Льенаром и Р. Шипаром.
Доказано, что в том случае, когда все коэффициенты характеристического
уравнения (3.30) положительны (а0>0, а1>0,.....,аn>0), из того факта, что положительны все
определители 1 , 3 , 5 ,..... с нечетными индексами, следует и положительность
определителей А. Гурвица 2 , 4 , 6 ,..... с четными индексами, и наоборот.
Поэтому в тех случаях, когда выполнены необходимые условия устойчивости, т. е.
а0>0, а1>0,.....,аn>0, необходимые и достаточные условия устойчивости сводятся к тому,
чтобы
среди
определителей
Гурвица
1 , 2 ,......., n были положительны все
определители с четными (или же все определители с нечетными) индексами.
Таким образом, для того чтобы система автоматического управления была
устойчива, необходимо и достаточно, чтобы выполнялись следующие неравенства:
a0 0,
a1 0,
...,
an 0,
1 0, 3 0, 5 0, ...,
a0 0,
a1 0,
...,
(16.20)
или
an 0,
2 0, 4 0, 6 0, ....
(16.21)
Последняя формулировка критерия устойчивости, называемая критерием
устойчивости Льенара-Шипара, требует раскрытия меньшего числа определителей, чем
обычный критерий Гурвица, а поэтому особенно удобна при исследовании устойчивости
систем автоматического управления высокого порядка.
Контрольные вопросы:
1. Чему равно число строк таблиц Рауса?
2. Какие знаки должны иметь определители Гурвица для того, чтобы система
автоматического управления была устойчива?
3. Почему критерий Гурвица называют критерием Рауса-Гурвица?
17-ЛЕКЦИЯ
Частотные критерии устойчивости. Принцип аргументов.
Широкое распространение на практике получили частотные критерии
устойчивости, которые позволяют обойтись без вычисления корней характеристического
уравнения. В этих критериях исследуется уравнение характеристической кривой,
получающейся заменой в (2.94) р на j
B j= an j + an1 j
n
n1
+ ... + a1 j+ a0 = P+ jQ ;
P= a0 a2 2 + a4 4 ; Q= a1 a3 3 + a5 5 .
Критерий Михайлова. В соответствии с данным критерием САУ будет устойчивой,
если при возрастании частоты от 0
до вектор B j повернется на угол
годограф вектора B jω при измене-
n / 2 .
Другими словами, САУ устойчива, если
нии частоты от 0 до + последовательно "обходит" п квадрантов в положительном
направлении (против часовой стрелки). На рис. 2.21, а показаны примеры годографов для
устойчивых систем с n = 1, n = 2, ..., n = 5 . Так, при n = 2 изменение аргумента равно и годограф проходит через два квадранта. На рис. 2.21, б
приведен годограф неустойчивой систе- мы с n = 4 . Система находится на границе
устойчивости, если ее годограф пересекает начало координат, обходя при этом
квадрантов. Здесь частота является одновременно корнем уравнений P= 0 и
Q= 0 .
n 1
На основе рассмотрения функций P , Q 0, формулируется критерий
перемежаемости корней: если
между двумя соседними корнями Q 0 лежит корень уравнения P 0
(или между двумя соседними корнями
P 0 находится корень уравнения Q 0 ), и сума корней равна
будет устойчива.
n,
то система
Критерий Найквиста (Найквиста-Михайлова или амплитудно-фазовый критерий
устойчивости). Данный критерий позволяет делать вывод об устойчивости САУ с
обратной связью на основе рассмотрения частотных характеристик ра- зомкнутой
системы.
Для разомкнутой САУ критерий формулируется следующим образом: САУ с
включенной обратной связью будет устойчивой, если АФХ разомкнутой системы Wраз
j при возрастании частоты от 0 до не охватывает точки с ко- ординатами 1, j0
(рис. 2.29, а, б). Заметим, что случай, представленный на рис. 2.23, а соответствует
абсолютной ус-
тойчивости, а на рис. 2.23, б – относительной. Относительно устойчивая система при
уменьшении передаточного коэф- фициента может стать неустойчивой. Если годограф
проходит через точку 1, j0 (рис. 2.23, в), то система находится на границе устойчивости,
и если АФХ Wраз j охватывает точку 1, j0 , то замкнутая САУ будет неустойчива
(рис. 2.23,
г).
В случае многоконтурных САУ с местными обратными связями и систем,
содержащих неустойчивые звенья, ра- зомкнутая система может быть неустойчивой. Здесь
замкнутая САУ будет устойчивой, если АФХ Wраз j охватывает точку 1, j0 в
положительном направлении n1 / 2 раз, где n1 – число корней характеристического
уравнения с положительной вещественной частью для разомкнутой системы. За положительное направление
принимается переход Wраз j
из верхней полуплоскости в нижнюю при возрастании , переход из нижней
полуплоскости в верхнюю считается отри- цательным.
18-ЛЕКЦИЯ
Частотные критерии устойчивости. Принцип аргумента. критерий устойчивости
Михайлова. критерий устойчивости Найквиста
План:
1. Частотные критерии устойчивости. Принцип аргумента.
2. Критерий устойчивости Михайлова
3. Критерий устойчивости Найквиста
Частотные критерии устойчивости позволяют судить об устойчивости систем
автоматического управления по виду их частотных характеристик. Эти критерии являются
графоаналитическими и получили широкое распространение, так как позволяют
сравнительно легко исследовать устойчивость систем высокого порядка, а также имеют
простую геометрическую интерпретацию и наглядность.
Принцип аргумента. В основе частотных критериев устойчивости лежит следствие
из известного в теории функций комплексного переменного принципа аргумента, который
кратко излагается ниже.
Пусть дан некоторый полином n-й степени D(s)=a0sn+a1sn-1+…..+an. Этот полином в
соответствии с теоремой Безу можно представить в виде D(s)=a0(s-s1)(s-s2)......(s-sn), где
si i ji – корни уравнения D(s)=0.
На комплексной плоскости s каждый корень геометрически может быть изображен
вектором, проведенным из начала координат к точке si (рис. 18.1, а). Длина этого вектора
равна модулю комплексного числа si т. е. |si|, а угол, образованный вектором с
положительным направлением действительной оси, – аргументу или фазе комплексного
числа si т. е. Arg si.
Величины (s-si) геометрически изображаются векторами, проведенными из точки si
к произвольной точке s (рис. 18.1, б). В частном случае при s j получим
D( j ) a0 ( j s1 )( j s2 ),....,( j sn ).
(18.1)
Концы элементарных векторов ( j si ) будут находиться на мнимой оси в точке
s j (рис. 18.1, в).
В выражении (18.1) D( j ) представляет собой вектор, равный произведению
элементарных векторов ( j si ) и действительного числа а0.
Модуль этого вектора равен произведению модулей элементарных векторов и а0:
D( j ) a0 j s1 j s2 ..... j sn ,
(18.2)
а аргумент или фаза его равна сумме аргументов элементарных векторов:
ArgD ( j ) Arg ( j s1 ) Arg ( j s2 ) ..... Arg ( j sn )
(18.3)
Условимся считать вращение против часовой стрелки положительным. Тогда при
изменении от до каждый элементарный вектор повернется на угол , если его
начало, т. е. корень si, расположено слева от мнимой оси, и на угол , если корень
расположен справа от мнимой оси (рис. 18.2).
Предположим, что полином D(s) имеет m правых корней и n-m левых.
Рис. 18.1
Рис.18.2
Рис.18.3
от до изменение (приращение) аргумента вектора
D( j ) , равное сумме углов поворота векторов ( j si ) , равно
Тогда при изменении
ArgD( j )
(n m) m (n 2m) (18.4)
Отсюда вытекает следующее правило: изменение {приращение) аргумента D( j )
при изменении частоты от до равно разности между числом левых и правых
корней уравнения D(s)=0, умноженной на .
Очевидно, что при изменении частоты
D( j ) будет вдвое меньше:
ArgD( j )
от 0 до изменение аргумента вектора
( / 2)(n 2m)
0
(18.5)
В основу всех частотных критериев устойчивости положено уравнение (18.4),
определяющее приращение аргумента D( j ) при изменении от до , или (18.5)
– при, изменении
от 0 до .
Критерий
устойчивости
Михайлова.
Этот
критерий
устойчивости,
сформулированный в 1938 г. советским ученым А.В. Михайловым, является, по существу,
геометрической интерпретацией принципа аргумента и позволяет судить об устойчивости
системы на основании рассмотрения некоторой кривой, называемой кривой Михайлова.
Пусть
дано
характеристическое
уравнение
системы.
Левую
характеристического уравнения называют характеристическим полиномом
D( s ) a0 s n a1s n 1 ........ an
Если подставить в этот полином чисто мнимое значение
часть
(18.6)
s j , то получим комплексный
полином
D( j ) a0 ( j ) n a1 ( j ) n 1 ........ an X ( ) jY ( ) D( )e j ( )
(18.7)
где
X ( ) an an 2 2 an 4 4 ....,
Y ( ) (an 1 an 3 2 an 5 4 ...)
(18.8)
называют соответственно вещественной и мнимой функциями Михайлова; функции D( )
и ( ) представляют собой модуль и фазу (аргумент) вектора D( j ) .
При изменении частоты со вектор D( j ) , изменяясь по величине и направлению,
будет описывать своим концом в комплексной плоскости некоторую кривую, называемую
кривой (годографом) Михайлова.
В соответствии с (18.5) угол поворота вектора D( j ) вокруг начала координат при
изменении частоты
от 0 до равен
ArgD( j )
(n 2m).
0 2
Отсюда определяем число правых корней полинома D (s), т. е.
n / 2 ArgD( j )
m
2
0
.
(18.9)
Из (18.9) видно, что число правых корней m будет равно нулю при одном-единственном
условии
ArgD( j )
n / 2.
0
(18.10)
Условие (18.10) является необходимым, но не достаточным условием устойчивости.
Для устойчивости системы необходимо и достаточно, чтобы все n корней
характеристического уравнения были левыми; иначе говоря, среди них не должно быть
корней, лежащих на мнимой оси и обращающих в нуль комплексный прлином D( j ) , т.
е. должно выполняться еще одно условие
D( j ) 0
(18.11)
Формулы (18.10) и (18.11) представляют математическое выражение критерия
устойчивости Михайлова: для того чтобы система автоматического управления была
устойчива, необходимо и достаточно, чтобы вектор кривой Михайлова D( j ) при
изменении от 0 до повернулся, нигде не обращаясь в нуль, вокруг начала координат
против часовой стрелки на угол n / 2 , где n –порядок характеристического уравнения.
Заметим, что для устойчивых систем кривая Михайлова начинается при 0 на
вещественной положительной полуоси, поскольку при а0>0 все коэффициенты
характеристического уравнения положительны и D(0)=аn>0. Кроме того, для устойчивых
систем, описываемых обыкновенными дифференциальными уравнениями с постоянными
коэффициентами, фаза (аргумент) ( ) с ростом частоты со должна возрастать монотонно, т. е вектор D( j ) должен поворачиваться только против часовой стрелки,
поскольку с ростом частоты монотонно возрастают имеющие одинаковые (положительные)
знаки фазы элементарных векторов ( j si ) , являющиеся слагаемыми фазы вектора
D ( j ) .
Учитывая сказанное выше, критерий устойчивости Михайлова можно
сформулировать так: для того чтобы система автоматического управления была устойчива,
необходимо и достаточно, чтобы кривая (годограф) Михайлова при изменении частоты
от 0 до , начинаясь при 0 на вещественной положительной полуоси, обходила
только против часовой стрелки последовательно n квадрантов координатной плоскости, где
n–порядок характеристического уравнения.
Кривая Михайлова для устойчивых систем всегда имеет плавную спиралевидную
форму, причем конец ее уходит в бесконечность в том квадранте координатной плоскости,
номер которого равен степени характеристического уравнения.
На рис. 18.4 показаны типичные кривые Михайлова для устойчивых систем,
описываемых уравнениями, начиная от первого (n=1) и кончая пятым (n=5) порядком. Для
удобства сравнения коэффициенты аn во всех случаях приняты одинаковыми.
Признаком
неустойчивости
системы
является
нарушение
числа
и
последовательности пройденных кривой Михайлова квадрантов координатной плоскости,
вследствие чего угол поворота вектора D( j ) оказывается меньше, чем n / 2 .
На рис. 3.10 показаны кривые Михайлова для неустойчивых и нейтральных систем.
Рис. З.10, а- при 0 кривая Михайлова начинается на отрицательной вещественной
полуоси; система неустойчива. Рис. 3.10, б- порядок уравнения n=5, а кривая Михайлова
находится вся в одном квадранте (этому соответствует характеристическое уравнение
D( s ) a0 s 2 a1s 4 a2 0 );
система
неустойчива.
Рис.
18.5,
в–нарушена
последовательность прохождения квадрантов; система неустойчива. Рис. 18.5, г–кривая
Михайлова начинается в начале координат, т. е. в характеристическом уравнении имеется
по крайней мере один нулевой корень; система находится на границе апериодической
устойчивости; небольшая деформация кривой Михайлова (прерывистая линия) делает
систему устойчивой. Рис. 18.5, д–кривая Михайлова Проходит при некотором значении
k через начало координат, т. е. в характеристическом уравнении имеются чисто
мнимые корни jk ; система находится на границе колебательной устойчивости;
частоты
небольшая деформация кривой Михайлова делает систему устойчивой (прерывистая
линия). Рис. 18.5, e- кривая Михайлова проходит через начало координат, но небольшой
деформацией кривой Михайлова удовлетворить условиям устойчивости нельзя; система
неустойчива.
Построение кривой Михайлова практически производится
контрольных точек, либо методом вспомогательных годографов.
либо
методом
Рис. 18.4.
Первый метод сводится к определению ряда точек кривой Михайлова, соответствующих
фиксированным значениям частоты , включая (обязательно) частоты точек пересечения
кривой с осями координат, которые находятся как корни уравнений (18.12) и (18.13). При
втором методе предварительно определяют годографы отдельных звеньев системы и по
ним строят искомую кривую Михайлова, применяя правила умножения и сложения
векторов.
Рис. 18.5
Анализируя годографы Михайлова, можно установить следующее следствие из
критерия устойчивости Михайлова. При последовательном прохождении кривой
Михайлова квадрантов координатной плоскости вещественная и мнимая оси пересекаются
ею поочередно. В точках пересечения кривой Михайлова с вещественной осью обращается
в нуль мнимая функция Михайлова Y ( ) , а в точках пересечения кривой с мнимой осью
обращается в нуль вещественная функция X ( ) . Поэтому значения частот, при которых
происходит пересечение кривой с вещественной или мнимой осью, должны являться
корнями уравнений
X ( ) =0;
(18.12)
Y ( ) =0.
(18.13)
Вещественную X ( ) и мнимую Y ( ) функции Михайлова можно представить
графически в виде кривых (рис. 18.6). Точки пересечения этих кривых с осью абсцисс дают
значения корней уравнений (18.12) и (18.13). Если значения
уравнения
(3.63),
а
1 , ;
3 , ; 5 ,.....
-
0 , 2 , 4 , …. есть корни
уравнения
(18.12),
причем
0 2 4 ....,1 3 5 ...., то для устойчивой системы обязательно соблюдение
неравенства
0 1 2 3 4 5 ......
(18.14)
Рис. 18.6.
В связи с указанным следствием можно привести другую формулировку критерия
устойчивости Михайлова: система, автоматического управления будет устойчива тогда и
только тогда, когда вещественная X ( ) и мнимая Y ( ) функции Михайлова,
приравненные нулю, имеют все действительные и перемежающиеся корни, причем общее
число этих корней равно порядку характеристического уравнения п, и при 0
удовлетворяются условия
X (0) 0, Y 1 (0) 0 .
На рис. 18.6, а приведен пример графиков X ( ) и Y ( ) для устойчивой системы,
а на рис. 18.6, б - для неустойчивой системы.
Для уравнений до шестого порядка включительно условие перемежаемости корней
дает возможность легко провести аналитическое исследование устойчивости, не
вычерчивая кривую Михайлова. При этом обычно определяют только корни уравнения
Y ( ) =0. Перемежаемость корней уравнений X ( ) =0 и Y ( ) =0 можно проверить
подстановкой в X ( ) найденных корней уравнения Y ( ) =0. Как видно из рис. 18.6,а,
знаки X ( ) при подстановке возрастающих по абсолютной величине корней должны
чередоваться.
Критерий устойчивости Найквиста. Этот частотный Критерий устойчивости,
разработанный в 1932 г. американским ученым Г. Найквистом, позволяет судить об
устойчивости замкнутой системы по виду амплитудно-фазовой характеристики
разомкнутой системы.
Пусть передаточная функция разомкнутой системы
R( s) b0 s m b1s m 1 bm
W ( s)
, mn
Q( s) c0 s n c1s n 1 cn
Подставляя в (18.15)
(18.15)
s j , получаем частотную передаточную функцию
разомкнутой системы:
R( j ) b0 ( j ) m b1 ( j ) m 1 bm
W ( j )
U ( ) jV ( ) A( )e j ( ) (18.16)
n
n 1
Q( j ) c0 ( j ) c1 ( j ) cn
где U ( ) и Y ( ) – действительная и мнимая части частотной передаточной функции
соответственно; модуль A( ) и фаза
( ) частотной передаточной функции равны
V ( )
A( ) U 2 ( ) V 2 ( ); ( ) Arctg
.
U ( )
Если изменять частоту
от до , то вектор W ( j ) будет меняться по
величине и фазе. Кривую, описываемую концом этого вектора в комплексной плоскости,
называют амплитудно-фазовой характеристикой разомкнутой системы (рис. 18.7).
Рис. 18.7.
Амплитудно-фазовая характеристика симметрична относительно вещественной оси,
поэтому обычно вычерчивают только ту часть ее, которая соответствует положительным
частотам >0 (сплошная линия на рис. 18.7), а ветвь этой характеристики,
соответствующая отрицательным частотам <0 (пунктирная линия на рис. 18.7), может
быть найдена как зеркальное отражение ветви, соответствующей положительным частотам,
относительно вещественной оси.
Рассмотрим вспомогательную функцию
( s) 1 W ( s) 1 R( s) / Q( s) Q( s) R( s) / Q( s), D( s) / Q( s),
где
D( s) Q( s ) R( s) a0 s n a1s n 1...... an –
замкнутой системы;
характеристический
(18.17)
полином
Q( s ) c0 s n c1s n 1 ..... cn – характеристический полином
разомкнутой системы; R ( s ) b0 s b1s
m
m 1
bm – полином степени m.
Заметим, что так как в реальных системах степень полинома R(s) не выше степени
полинома Q(s), т. е. m n , то степени числителя и знаменателя дроби (18.17) одинаковы и
равны n.
Подставляя в (18.17)
s j , получим
( s) 1 W ( j ) Q( j ) R( j ) / Q( j ) D( j ) / Q( j ).
(18.18)
Пусть характеристическое уравнение замкнутой системы D(s)=0 имеет m правых
корней и n-m левых корней, а характеристическое уравнение разомкнутой системы Q(s)=0
имеет l правых и n- l левых корней.
При изменении частоты
от до изменение угла поворота вектора ( j )
на основе принципа аргумента будет
Arg ( j )
ArgD( j ) ArgQ( j ) (n m) m (n l ) l 2 (l m)
(18.19)
Для устойчивости замкнутой системы необходимо и достаточно, чтобы все корни ее
характеристического уравнения были левыми, т. е. m=0. Отсюда суммарный поворот
вектора ( j ) устойчивой системы вокруг начала координат должен быть равен
Arg ( j )
2l
(18.20)
где l – число правых корней характеристического уравнения разомкнутой системы.
Обычно рассматривают только положительные частоты
поворота вектора ( j ) будет вдвое меньше, т. е.
Arg ( j )
>0, в этом случае угол
l 2l / 2
0
(18.21)
Таким образом, если разомкнутая система является неустойчивой и имеет l правых
корней, то замкнутая система будет устойчива тогда и только тогда, когда амплитуднофазовая характеристика вспомогательной, функции ( j ) при изменении частоты от 0
до охватывает начало координат в положительном направлении l /2 раз.
Легко заметить, что число оборотов вектора
( j ) вокруг начала координат равно
числу оборотов вектора W ( j ) вокруг точки (-1, j0).
На основании сказанного вытекает следующая формулировка критерия
устойчивости Найквиста: если разомкнутая система автоматического управления
неустойчива, то, для того чтобы замкнутая система автоматического управления была
устойчива, необходимо и достаточно, чтобы амплитудно-фазовая характеристика
разомкнутой системы W ( j ) при изменении частоты от 0 до охватывала точку (-1,
j0) в положительном направлении l /2 раз, где l - число правых корней характеристического
уравнения разомкнутой системы.
На рис. 18.8, а показана амплитудно-фазовая характеристика ( j ) , а на рис. 18.8,
б – амплитудно-фазовая характеристика W ( j ) , соответствующие устойчивой замкнутой
системе, которая в разомкнутом состоянии была неустойчива и имела число правых корней
l =2. Обычно в реальных системах W ( j ) 0 , и поэтому ( j ) 1.
При сложной форме характеристики W ( j ) могут возникнуть затруднения при
определении числа ее оборотов вокруг критической точки (-1, j0). В этом случае для
суждения об устойчивости удобно применять «правило переходов», предложенное Я. 3.
Цыпкиным.
Назовем переход характеристики W ( j ) через отрезок вещественной оси слева от
точки, (-1, j0), т. е. через отрезок ( , -1), при возрастании положительным, если он
происходит сверху вниз, и отрицательным, если он происходит снизу вверх. Если
характеристика W ( j ) начинается на отрезке ( , -1) при =0 или заканчивается на
нем при
,
то в этих случаях считают, что она совершает полперехода.
Тогда критерий Найквиста можно сформулировать так: если разомкнутая система
автоматического управления неустойчива, то, для того чтобы замкнутая система автоматического управления была устойчива, необходимо и достаточно, чтобы разность между
числом положительных и отрицательных переходов амплитудно-фазовой характеристики
разомкнутой системы W ( j ) через отрезок вещественной оси ( , -1) при изменении
частоты от 0 до была равна l /2, где l – число правых корней характеристического
уравнения разомкнутой системы.
Если система автоматического управления в разомкнутом состоянии устойчива, т. е.
l =0, то приращение аргумента вектора ( j ) равно нулю:
Arg ( j )
2l 0
(18.22)
Это означает, что для устойчивости замкнутой системы необходимо, чтобы амплитуднофазовая характеристика ( j ) не охватывала начало координат (рис. 18.9, а), а
амплитудно-фазовая характеристика W ( j ) не охватывала точку с координатами (-1, j0),
(рис. 18.9, б).
Таким образом, для этого наиболее часто встречающегося на практике случая
получаем следующую формулировку критерия Найквиста: если разомкнутая система
автоматического управления устойчива, то замкнутая система автоматического управления
будет устойчива, если амплитудно-фазовая характеристика разомкнутой системы W ( j )
не охватывает точку (-1, j0).
Рис. 18.8.
Рис. 18.9.
Амплитудно-фазовые
характеристики
разомкнутых
статических
систем
автоматического управления при изменении частоты от до образуют замкнутый
контур. У астатических разомкнутых систем, которые содержат интегрирующие звенья ,
амплитудно-фазовые характеристики не образуют замкнутого контура. Для таких систем
характеристическое уравнение разомкнутой системы имеет корни, равные нулю, и может
быть записано в виде
Q( s ) s Q1 ( s) 0,
(18.23)
где –порядок астатизма; Q1 ( s ) –полином, не имеющий корней, равных нулю.
Частотная передаточная функция разомкнутой астатической системы, содержащей
интегрирующие звенья,
W ( j ) W ( s) s j R( s) / s Q1 ( s )
s j
R( j ) / ( j ) Q1 ( j ) .
(18.24)
При 0 частотная передаточная функция астатической системы обращается в
, а ее амплитудно-фазовая характеристика претерпевает разрыв. Поэтому в этом случае
трудно решить вопрос об устойчивости замкнутой системы, так как неясно, охватывает ли
амплитудно-фазовая характеристика W ( j ) точку (-1, j0).
j при изменении частоты от до изменяют при переходе через
начало координат фазовый угол скачком c / 2 до / 2 , но в каком направлении
Векторы
происходит их поворот в момент перехода через начало координат, сказать невозможно.
Чтобы освободиться от этой неопределенности, идя по мнимой оси при изменении, частоты
от до , обходят начало координат в плоскости корней справа по полуокружности
бесконечно малого радиуса r (рис. 18.10), т.е. считают не s=0, a
s re j (r 0, / 2 / 2).
Обходу начала координат по малой дуге re
передаточная функция разомкнутой системы
W ( s)
R( s )
s Q1 ( s)
s 0
j
в плоскости корней соответствует
R(0)
1
Q1 (0) (re j )
(18.25)
где bm и cm – свободные члены полиномов R(s) и Q1(s).
При r 0 модуль R , а аргумент
меняется от
/ 2
до - / 2 при
изменении от - / 2 до / 2 . Таким образом, во время движения по полуокружности
бесконечно малого радиуса в плоскости корней частотная передаточная функция
разомкнутой системы W ( j ) может быть представлена в виде вектора бесконечно
большой длины, поворачивающегося на комплексной плоскости по часовой стрелке на
угол, равный - (от / 2 до - / 2 ).
от 0 до , т. е. при r 0 и 0 / 2 , частотная
передаточная функция W ( j ) будет изменяться по дуге бесконечно большого радиуса,
описывая угол от 0 до - / 2 .
При изменении
Рис. 18.10
Рис. 18.11
На рис. 18.11 показана амплитудно-фазовая характеристика
астатической системы с астатизмом первого порядка 1.
разомкнутой
На основе сказанного выше для определения устойчивости систем с астатизмом
любого порядка достаточно построить одну ветвь амплитудно-фазовой характеристики
разомкнутой системы, соответствующую положительным частотам, дополнить ее - / 2
дугой окружности бесконечно большого радиуса и затем применить критерий
устойчивости Найквиста.
Рис. 18.12
Рис. 18.13
Например, если разомкнутая астатическая система неустойчива, то замкнутая
система будет устойчива, если при изменении частоты от 0 до амплитудно-фазовая
характеристика разомкнутой астатической системы W ( j ) , дополненная дугой - / 2
бесконечно большого радиуса, охватит точку (-1, j0) в положительном направлении l / 2 ,
раз, где l -число правых корней характеристического уравнения разомкнутой системы.
На рис. 18.12 приведена амплитудно-фазовая характеристика разомкнутой системы
с астатизмом второго порядка =2. Замкнутая система в этом случае будет неустойчива,
так как амплитудно-фазовая характеристика W ( j ) , дополненная дугой / 2
бесконечно большого радиуса, всегда охватывает точку (-1, j0) в отрицательном
направлении (по часовой стрелке).
На рис. 18.13 приведена амплитудно-фазовая характеристика разомкнутой системы
с астатизмом второго порядка, которая после дополнения ее дугой / 2
бесконечно большого радиуса не охватывает точку (-1, j0) (число положительных и
отрицательных переходов через отрезок ( , -1) равно нулю). Следовательно, замкнутая
система будет устойчива.
Одним из достоинств критерия Найквиста является то, что он может быть применен
и в тех практически важных случаях, когда неизвестны уравнения некоторых звеньев
системы либо даже неизвестно уравнение всей разомкнутой системы в целом, но
амплитудно-фазовая характеристика разомкнутой системы может быть получена
экспериментально. Кроме того, критерий Найквиста позволяет, как это будет показано
ниже, довольно просто исследовать устойчивость систем с запаздыванием.
Так как параметры системы определяют обычно приближенно и в процессе работы
они могут изменять свое значение, то важна оценка удаления амплитудно-фазовой
характеристики разомкнутой системы W ( j ) от точки (-1, j0). Это удаление определяет
запас устойчивости, который характеризуется двумя величинами: запасом устойчивости по
фазе и запасом устойчивости по амплитуде.
Рис. 18.14
Рис. 18.15
Запас устойчивости по фазе определяют как величину угла
частоты
(c ) для
c , при которой W ( )c 1 ; по амплитуде – как величину отрезка оси абсцисс h,
заключенного между критической точкой (-1, j0) и амплитудно-фазовой характеристикой
(рис. 18.14).
С ростом коэффициента усиления разомкнутой системы модуль амплитуднофазовой характеристики также растет и при некотором значении коэффициента усиления
K=Kкр, называемого критическим коэффициентом усиления, амплитудно-фазовая
характеристика пройдет через точку (-1, j0), т. е. система будет на границе устойчивости.
При K K kp система будет неустойчива.
Однако встречаются системы (с внутренними обратными связями), в которых потеря
устойчивости может произойти не только при увеличении коэффициента усиления, но
также и при его уменьшении. Этим случаям могут соответствовать так называемые
клювообразные амплитудно-фазовые характеристики (рис. 18.15). В этих случаях запас
устойчивости по амплитуде определяется величинами двух отрезков h оси абсцисс,
заключенных между критической точкой (-1, j0) и амплитудно-фазовой характеристикой.
Чтобы система обладала требуемым запасом устойчивости при заданных величинах
h и , около критической точки (-1, j0) вычерчивается некоторая запретная область в виде
сектора, ограниченного величинами h и , в которую амплитудно-фазовая
характеристика W ( j ) не должна входить (рис. 18.15).
Контрольные вопросы:
1. Как можно судить об устойчивости системы на основании принципа аргумента
2. Как можно судить об устойчивости системы на основании критерия устойчивости
Михайлова?
3. Как можно судить об устойчивости системы на основании критерия устойчивости
Найквиста?
19-ЛЕКЦИЯ
Логарифмический частотный критерий устойчивости
План:
1. Логарифмические частотные характеристики разомкнутой системы
2. Критерий устойчивости Найквиста
3. Амплитудно-фазовая характеристика разомкнутой системы
В инженерной практике широкое применение получил анализ устойчивости систем
автоматического управления, основанный на применении логарифмических частотных
характеристик разомкнутой системы. Это обусловлено прежде всего тем, что построение
логарифмических
частотных
характеристик
разомкнутых
систем,
особенно
асимптотических логарифмических частотных характеристик, значительно проще, чем
построение годографа амплитудно-фазовых характеристик.
Покажем, каким требованиям должны удовлетворять логарифмическая амплитудночастотная характеристика (ЛАХ) и логарифмическая фазочастотная характеристика (ЛФХ)
разомкнутой системы, при которых обеспечивалась бы устойчивость системы в замкнутом
состоянии.
Как было показано выше, устойчивость связана с числом переходов амплитуднофазовой характеристики W ( j ) отрезка ( , -1) отрицательной вещественной полуоси.
W ( j ) пересекает отрицательную
вещественную полуось, ЛФХ пересекает одну из линий (2i 1) , где i – 0,1,2,3,.... (рис.
Когда
амплитудно-фазовая
характеристика
19.1). Переходы через эти линии не опасны с точки зрения устойчивости, если они
совершаются справа от точки (- 1, j0), т. е. если при этом модуль амплитудно-фазовой
характеристики меньше единицы W ( j ) 1 и, следовательно, если ординаты ЛАХ отрицательны, т. е. LmA( ) 20 lg W ( j ) 0 . Поэтому область отрицательных ЛАХ при.
исследовании устойчивости интереса не представляет.
Положительному переходу (сверху вниз) через отрезок ( , -1) характеристики
W ( j ) соответствует пересечение ЛФХ при LmA( ) 0 прямых (2i 1) снизу вверх
(точка 2 на рис. 3.21), а отрицательному переходу сверху вниз (точка 1 на рис. 19.1).
Критерий устойчивости Найквиста применительно к логарифмическим частотным
характеристикам может быть сформулирован следующим образом: для того чтобы система
автоматического управления была устойчива, необходимо и достаточно, чтобы разность
между числом положительных и отрицательных переходов логарифмической
фазочастотной характеристикой прямых (2i 1) , i = 0,1, 2,..., во всех областях, где
логарифмическая амплитудно-частотная характеристика положительна LmA( ) 0 , была
равна l / 2 ( l –число правых корней характеристического уравнения разомкнутой
системы).
На рис. 19.1 приведены для примера амплитудно-фазовая характеристика
разомкнутой системы W ( j ) и соответствующие ей ЛАХ и ЛФХ. Из анализа этих ЛАХ и
ЛФХ видно, что разность между числом положительных и отрицательных переходов ЛФХ
прямых при LmA( ) 0 равна нулю. Таким образом, если разомкнутая система была
устойчива ( l =0), то и замкнутая система будет устойчива, при этом запасы устойчивости
по амплитуде равны h1 и h2, а запас устойчивости по фазе равен .
Рис. 19.1
Контрольные вопросы:
1. Почему область отрицательных ЛАХ при исследовании устойчивости не
представляет интереса?
2. Логарифмические частотные характеристики разомкнутой системы
3. Амплитудно-фазовая характеристика разомкнутой системы
20-ЛЕКЦИЯ
Построение областей устойчивости в плоскости параметров системы. Понятие о D –
разбиении. Устойчивость систем с запаздыванием и систем с иррациональными
звеньями
План:
1. Понятие о D – разбиении
2. Устойчивость систем с запаздыванием и систем с иррациональными звеньями
3. Критическое время запаздывания
При исследовании устойчивости большое практическое значение имеет построение
областей устойчивости в плоскости одного или каких-либо двух параметров, влияние
которых на устойчивость исследуют, а также построение семейства областей устойчивости
в плоскости двух параметров при различных фиксированных значениях третьего
параметра.
Уравнение границ областей устойчивости можно находить, пользуясь любым
критерием устойчивости. Однако чаще всего на практике применяют наиболее общий
метод построения областей устойчивости, который был предложен Ю.И. Неймарком и
назван им методом D-разбиения.
Понятие о D-разбиении. Рассмотрим характеристическое уравнение замкнутой
системы n-го порядка, которое делением на коэффициент при переменном s с наивысшей
степенью всегда может быть приведено к виду
D( s) s n a1s n 1 ........ an 0, a0 1 .
(20.1)
Представим себе n-мерное пространство, по координатным осям которого отложены
коэффициенты уравнения (20.1). Это пространство называют пространством
коэффициентов. Каждой точке пространства коэффициентов соответствуют конкретные
числовые значения коэффициентов уравнения (20.1) и соответствующий им полином n-го
порядка. Уравнение (20.1) имеет n корней, расположение которых на комплексной
плоскости корней s зависит от числовых значений коэффициентов ai.
Если изменять коэффициенты ai уравнения (20.1), то его корни в силу их
непрерывной зависимости от коэффициентов будут перемещаться в комплексной
плоскости корней, описывая корневые годографы.
Чтобы представить сказанное выше геометрически, рассмотрим характеристическое
уравнение третьего порядка (n=3)
D( s ) s 3 a1s 2 a2 s a3 0.
(20.2)
Если взять три взаимно перпендикулярные оси и откладывать по ним значения
коэффициентов a1, a2, a3 то получим трехмерное пространство коэффициентов, каждой
точке которого соответствуют вполне определенный полином третьей степени и вполне
определенные три корня в комплексной плоскости корней s (рис. 20.1).
Например, точке М, имеющей координаты a1M , a2 M , и a3M, соответствует
3
2
полином DM ( s ) s a1M s a2 M s a3M , имеющий три корня s1M , s2 M , и s3 M в
плоскости корней (рис. 20.1, а). Другой точке, например N, имеющей координаты
a1N , a2 N , и a3 N , соответствует полином DN ( p) s 3 a1N s 2 a2 N s a3 N , корни
которого s1N , s2N , и s3 N и. т. д.
При некотором значении коэффициентов уравнения (20.2) один из корней попадает
в начало координат или пара корней попадает на мнимую ось, т. е. корни его будут иметь
вид 0 или j k и, следовательно, соответствующая точка в пространстве параметров
будет удовлетворять уравнению
D( jk ) ( jk )3 a1 ( jk ) 2 a2 ( jk ) a3 0
(20.3)
Этому уравнению при соответствует некоторая поверхность S, часть
которой показана на рис. 20.1, б.
При изменении коэффициентов a i корни характеристического уравнения также
изменяются и попадают на мнимую ось тогда, когда точка в пространстве коэффициентов
попадет на поверхность S. При пересечении такой поверхности S корни переходят из одной
полуплоскости корней в другую. Следовательно, поверхность S разделяет пространство
коэффициентов на области, каждой точке которых соответствует определенное одинаковое
число правых и левых корней. Эти области обозначают D(m) , где m — число правых
корней характеристического уравнения. Разбиение пространства коэффициентов на
области е одинаковым числом правых корней внутри каждой области и выделение среди
полученных областей области устойчивости называют методом D-разбиения.
Рис. 20.1
Для характеристического уравнения третьего порядка в пространстве коэффициентов можно наметить четыре области: D(3), D(2), D(1), D(0). Последняя область D(0) будет
областью устойчивости.
Рис. 20.2
Если изменяются не все коэффициенты, а часть из них, например два-а1 и а2 при
а3=const, то вместо поверхности получим линию, которая является сечением поверхности S
плоскостью а3=const. Эта линия разделит плоскость коэффициентов а1—а2 на области с
одинаковым числом правых корней (рис. 20.2).
Для уравнений более высокого порядка (n>3) вместо обычного трехмерного
пространства получаются многомерное пространство и гиперповерхности, разбивающие
это пространство на области, что сильно усложняет задачу, а рассмотрение теряет
наглядность.
Так как переход через границу D-разбиения в пространстве коэффициентов
соответствует переходу корней характеристического уравнения через мнимую ось, то
уравнение границы D-разбиения в общем случае
D( j ) ( j ) n a1 ( j ) n 1 ...... an 0
(20.4)
Из (12.4) видно, что уравнение границы D-разбиения может быть получено из
характеристического уравнения системы заменой s j . Границу D-разбиения можно
строить не только в пространстве коэффициентов a i характеристического уравнения, но и
в пространстве параметров системы (постоянных времени, коэффициентов усиления и т.
д.), от которых зависят коэффициенты характеристического уравнения.
Устойчивость систем с запаздыванием и систем с иррациональными звеньями
Системы автоматического управления могут содержать звенья, и которых
зависимость между входной u (t ) и выходной y (t ) величинами имеет вид
y(t ) u(t )
(20.5)
где –постоянная величина, называемая временем запаздывания. Такие звенья называют
запаздывающими, так как они воспроизводят изменения входной величины без искажения,
но с некоторым постоянным запаздыванием .
Передаточная функция запаздывающего звена
Wзап ( s ) e s
(20.6)
Рис. 20.3
Звенья с чистым запаздыванием часто встречаются в различных технологических
процессах, когда материал перемещается из одной точки в другую с помощью ленточных
транспортеров; в системах регулирования толщины листа при прокатке; в системах
магнитной записи и воспроизведения и т. д.
Системы автоматического управления, содержащие хотя-бы одно запаздывающее
звено, называют системами с запаздыванием. Процессы в системах с запаздыванием
описываются дифференциально-разностными уравнениями.
Структурная схема одноконтурной системы автоматического управления,
содержащей одно запаздывающее звено, может быть представлена либо так, как показано
на рис.20.3,а, если запаздывающее звено находится в прямой цепи, либо так, как показано
на рис.20.3,б, если запаздывающее звено находится в цепи обратной связи.
Передаточная функция разомкнутой системы с запаздыванием равна
W ( s) Wзап ( s)W ( s)
где W ( s )
R( s) s
e
Q( s )
(20.7)
R( s )
–передаточная функция разомкнутой системы без учета запаздывания,
Q( s )
представляющая собой дробно-рациональную функцию оператора s.
Заметим, что если в одноконтурной системе имеется несколько последовательно
соединенных запаздывающих звеньев, то они могут быть заменены одним запаздывающим
звеном с эквивалентной постоянной времени запаздывания, равной сумме всех постоянных
времен запаздывания.
Если запаздывающее звено находится в прямой цепи, то передаточная функция
замкнутой системы
W ( s)
R( s)e s
Wgx ( p)
R ( s) / D ( s)
1 W ( s) Q( s) R( s)e s
(20.8)
Если же запаздывающее звено находится в цепи обратной связи, то передаточная
функция замкнутой системы
Wgx ( p)
W ( s)
R( s)e s
R ( s)
1 W ( s) Q( s) R(s)e s D ( s)
(20.9)
Из (20.8) и (20.9) видно, что независимо от места включения запаздывающего звена
характеристическое уравнение системы с запаздыванием имеет вид
D ( s ) Q( s ) R( s )e s 0
(20.10)
s
Это характеристическое уравнение из-за наличия множителя e
является не
полиномом, а трансцендентной функцией оператора s и в отличие от обыкновенного
алгебраического уравнения имеет бесконечное множество корней. Так как
e
s
s 2 2 s 3 3
1 s
....,
2I
3I
то (20.10) можно рассматривать как уравнение «бесконечной степени».
Для того чтобы линейная система с постоянным запаздыванием была устойчива,
необходимо и достаточно, чтобы все корни уравнения (20.10) были левыми. Нахождение
корней уравнения (20.10) затруднительно, поэтому для исследования устойчивости систем
с запаздыванием используют критерии устойчивости.
Следует иметь в виду, что алгебраические критерии устойчивости Рауса и Гурвица
в их обычной форме для исследования систем с запаздыванием непригодны, причем для
устойчивости линейных систем первого и второго порядков с запаздыванием только
положительности коэффициентов характеристического уравнения уже становится
недостаточно. Существуют различные алгебраические критерии устойчивости для систем
с запаздыванием, которые являются аналогами критериев Рауса и Гурвица, однако в
инженерной практике они широкого применения не нашли из-за их относительной сложности.
Для исследования устойчивости систем с запаздыванием можно применять
основанные на принципе аргумента частотные критерии устойчивости Михайлова и
Найквиста либо метод D -разбиения.
Уравнение кривой (годографа) Михайлова системы с запаздыванием получают
после подстановки s j в характеристическое уравнение (20.10), т. е.
D ( j , e j ) Q( j ) R( j )e j 0
(20.11)
j
Наличие в (20.11) множителя e
делает очертания кривой Михайлова
достаточно сложными, и формулировка этого критерия для систем с запаздыванием
становится не такой простой, как для обычных систем. Как показал Я.3. Цыпкин, для
исследования устойчивости систем с запаздыванием очень удобно применять критерий
устойчивости Найквиста.
Заключение об устойчивости замкнутой системы с запаздыванием делается на
основании исследования поведения амплитудно-фазовой характеристики W ( j )
разомкнутой системы с запаздыванием относительно точки (-1, j0). Формулировка критерия
устойчивости Найквиста для систем с запаздыванием в этом случае аналогична
формулировке для обычных систем, имеющих дробно-рациональные передаточные
функции.
Частотную передаточную функцию W ( j ) разомкнутой системы с запаздыванием
находят, подставляя
s j :
W ( j ) W ( j )e j A( )e j A( )e j ( )
(20.12)
где W ( j ) U ( ) jV ( ) – амплитудно-фазовая характеристика разомкнутой системы
без учета запаздывания;
A( ) W ( j ) U 2 ( ) V 2 ( ) -амплитудно-частотная характеристика;
( ) Arctg
V ( )
фазочастотная характеристика разомкнутой системы без учета
U ( )
запаздывания;
( ) ( )
(20.13)
-фазочастотная характеристика разомкнутой системы с запаздыванием.
Из (20.12) и (20.13) видно, что наличие запаздывающего звена не меняет модуля
A( ) амплитудно-фазовой характеристики разомкнутой системы W ( j ) , а вносит лишь
дополнительный отрицательный фазовый сдвиг , пропорциональный частоте, причем
коэффициентом пропорциональности является время запаздывания т.
Зная амплитудно-фазовую характеристику W ( j ) разомкнутой системы без
запаздывания,
легко
построить
амплитудно-фазовую
характеристику
W ( j )
разомкнутой системы с запаздыванием. Для этого каждый модуль A(i ) вектора ам-
i по часовой
стрелке. С ростом частоты угол будет быстро расти, а модуль A( ) обычно
уменьшается, поэтому амплитудно-фазовая характеристика W ( j ) разомкнутой системы
плитудно-фазовой характеристики W ( j ) нужно повернуть на угол
с запаздыванием имеет вид спирали, закручивающейся вокруг начала координат (рис.20.4).
«Закручивание» амплитудно-фазовой характеристики из-за наличия дополнительного
фазового сдвига , вообще говоря, ухудшает условие устойчивости, так как вся
амплитудно-фазовая характеристика приближается к критической точке (-1, j0). Однако
иногда при сложной форме амплитудно-фазовой характеристики W ( j ) введение
постоянного запаздывания может улучшить условия устойчивости.
Рис. 20.4.
Изменяя время запаздывания т в широких пределах, можно найти такое его
значение, при котором замкнутая система будет находиться на границе устойчивости. В
этом случае характеристика W ( j ) будет проходить через точку (-1, j0). Время
запаздывания
kp и соответствующее ему значение частоты kp при которых W ( j )
проходит через, точку (–1,/0), называют критическими.
Для критического случая справедливо следующее условие:
W ( j ) W ( jkp )e
j kp kp
A(kp )e
j ( kp ) kp kp
1
(20.14)
Условие (20.14) можно записать раздельно для амплитуд и фаз вектора, W ( jkp ) :
A(kp ) W ( jkp ) 1
(20.15)
(kp ) (kp ) kp kp (2i 1)
(20.16)
где i = 0, 1, 2, 3, …...
Из (13.11) можно найти сначала
kp
kp , а затем из (20.16) найти kp , т. е.
(kp ) (2i 1) (kp ) 2
i
kp
kp
kp
(20.17)
Для систем автоматического управления с запаздыванием основное значение имеет
минимальное критическое время запаздывания (при i =0), которое является в то же время
и граничным
kp
(kp )
kp
Arctg
kp
Vkp
U kp
(kp )
kp
(20.18)
где
(kp ) Arctg
V (kp )
kp
-запас устойчивости по фазе.
Рис. 20.5.
Рис.20.6.
При сложном выражении для частотной передаточной функции W ( j )
разомкнутой системы определение критического времени запаздывания просто выполнить
графически. Условие A(kp ) W ( jkp ) 1 определяется пересечением годографа
W ( j ) с окружностью единичного радиуса с центром в начале координат (рис.20.5).
Точка пересечения определяет одновременно
разделен на
kp и угол (kp ) , который, будучи
kp , даст значение критического времени запаздывания.
Если имеется несколько точек пересечения годографа W ( j ) с окружностью
единичного радиуса, например при
1kp , 2 kp и 3kp (рис.20.6), то система будет иметь
несколько критических граничных времен запаздывания:
1kp (1kp ) / 1kp ; 2kp (2 kp) / 2kp ; 3kp (3 kp ) / 3kp ;
причем минимальное время запаздывания равно
при 1kp , а также при
kp min 1kp . Система будет устойчива
2 kp 3kp . Система будет неустойчива при 1kp 2kp а также
3kp . Наблюдаемое в этом случае чередование участков устойчивости и
неустойчивости системы при непрерывном изменении (а также других параметров сипри
стемы) является характерной особенностью многих систем с постоянным запаздыванием.
Обычно для повышения быстродействия и точности системы время запаздывания
стремятся уменьшить, поэтому критерий устойчивости формулируется лишь для
минимального времени запаздывания.
Система автоматического управления будет устойчива, если время запаздывания
меньше минимального критического времени запаздывания: kp min .
Критическое время запаздывания легко определяют и в том случае, когда для
исследования системы с запаздыванием применяют логарифмические амплитудночастотные (ЛАХ) и фазочастотные (ЛФХ) характеристики. В этом случае окружность
единичного радиуса представляют осью абсцисс. ЛАХ системы с запаздыванием совпадает
с ЛАХ исходной системы без запаздывания. Дополнительный фазовый сдвиг, который надо
учесть при построении ЛФХ системы с запаздыванием, определяют из (13.9). Точки
пересечения ЛАХ с осью абсцисс определяют критические частоты ikp а запасы по фазе
(с учетом кратности), отнесенные к соответствующим критическим частотам, определяют
критические времена запаздывания ikp .
Звенья с распределенными параметрами, описываемые уравнениями в частных
производных, имеют иногда передаточные функции вида
W (s) K / s ;
(20.19)
W ( s ) K /(1 sT );
(20.20)
W ( s) e
s
,
(20.21)
где К – коэффициент усиления звена.
Выражения (20.20) и (20.21) отличаются от передаточных функций интегрирующего
и инерционного звеньев только квадратным корнем. По аналогии с интегрирующими и
инерционными звеньями такие звенья называют пол у интегрирующими и
полуинерционными. Звенья, имеющие передаточные функции вида (20.19), (20.20), (20.21),
называют иррациональными звеньями. Выражение (20.21) не только иррационально, но и
трансцендентно. С иррациональными звеньями приходится встречаться, рассматривая
различные диффузионные и тепловые объекты, линии связи с потерями, с распределенными сопротивлениями и емкостями и т. п.
Устойчивость замкнутых систем автоматического управления, содержащих
иррациональные звенья, может быть исследована с помощью критерия устойчивости
Найквиста. Формулировка критерия устойчивости Найквиста в этом случае аналогична
формулировке для обычных систем автоматического управления, содержащих звенья с
дробно-рациональными передаточными функциями.
Контрольные вопросы:
1. Как можно найти уравнение границ областей устойчивости?
2. Частотная передаточная функция разомкнутой системы?
3. Звенья с распределенными параметрами
21-ЛЕКЦИЯ
Методы оценки качества регулирования линейных систем. Общие положения.
Оценка качества регулирования в установившемся режиме.
План:
1. Общие положения
2. Оценка качества регулирования в установившемся режиме.
3. Коэффициенты ошибок
Общие положения
При исследовании систем автоматического регулирования приходится решать
задачу обеспечения требуемых показателей качества переходного процесса:
быстродействия, колебательности, перерегулирования, характеризующих точность и
плавность протекания процесса. Будем предполагать, что система автоматического
регулирования описывается системой линейных дифференциальных уравнений с
постоянными коэффициентами. При изменении воздействия g(t) на входе системы
(рис.21.1) выходную величину х(t) можно записать так:
x(t ) xсв (t ) xв (t ),
(21.1)
где х(t) – решение дифференциального уравнения, описывающего систему; xсв (t ) –
свободная составляющая переходного процесса, соответствующая общему решению
однородного дифференциального уравнения.
Если последнее не имеет кратных корней, то
n
xсв (t ) Ci e sit ,
(21.2)
i 1
где Ci – постоянная интегрирования, значение которой определяют параметры системы и
начальные условия; si – корни характеристического уравнения замкнутой системы
D(s) 0; xв (t ) -вынужденная составляющая переходного процесса, обусловленная
законом изменения g(t).
Рис. 21.1.
Из (21.1) видно, что качество переходного процесса можно оценить по его составляющим xсв (t ) и xв (t ) . В этом смысле различают две группы показателей: первая
группа–показатели качества переходного процесса
xсв (t ) ; вторая – показатели,
характеризующие вынужденную (установившуюся) составляющую xв (t ) , по которой
определяют точность системы.
Показатели качества, определяемые непосредственно по кривой переходного
процесса, называют прямыми оценками качества. Кривая переходного процесса может
быть получена теоретически или экспериментально. В тех случаях, когда расчет
переходного процесса связан с большими трудностями, используют косвенные оценки
качества.
Оценка качества регулирования в установившемся режиме.
Коэффициенты ошибок
Рассмотрим показатели качества, характеризующие вынужденную составляющую
ошибки в (t ) системы. Если на входе системы (рис.21.1) действует сигнал g(t), то
установившаяся ошибка регулирования системы
â (t ) g (t ) xâ (t ) , где xв (t ) –
вынужденная составляющая регулируемой величины (13.1).
Если g(t) дифференцируема во всем интервале 0 t , то ошибка системы
â (t )
может быть представлена в виде ряда:
в (t ) C0 g (t ) C1dg (t ) / dt
1
1
C2 d 2 g (t ) / dt 2 .... Cm d m g (t ) / dt m ,
2!
m!
(21.3)
где коэффициенты С0, Cl, C2, ... принято называть коэффициентами ошибок. Формула (21.3)
получена следующим образом.
Передаточная функция замкнутой системы относительно ошибки (рис.13.1)
Wg ( s) 1/1 W ( s) EB ( s) / G( s).
(21.4)
Из (21.4) можно найти выражение для изображения ошибки:
EB (s) G(s) /1 W (s).
(21.5)
Разложим передаточную функцию по ошибке Wg (s ) в ряд по возрастающим
степеням s в окрестности точки s=0, что соответствует большим значениям времени
(t ) , т. е. значению установившейся ошибки при заданном управляющем воздействии.
В соответствии с (13.5) можно записать
1
1
1
E B ( s ) C0 C1 s C2 s 2 C3 s 3 .... Cm s m G ( s ),
2!
3!
m!
(21.6)
Если передаточная функция Wg (s ) является дробно-рациональной функцией
Wg ( s )
b0 s m b1s m1 ...... bm1s bm
a0 s n a1s n1 ...... an1s an
то разложение в ряд W g (s ) можно осуществить делением числителя на знаменатель,
располагая члены полинома в порядке возрастания степеней. Переходя в (21.6) от
изображений к оригиналам, можно получить для в (t ) выражение (21.3). Коэффициенты
ошибок С0, Cl, C2, ... определяют по формулам разложения функции W g (s ) в ряд Тейлора:
d 2Wg ( s )
C1
;
ds
s 0
2
m
d W g ( s )
d Wg ( s )
C2
; Cm
.
2
m
ds
s 0
ds
s 0
C0 Wg ( s ) s 0 ;
(21.7)
Если g(t)–1(t), то все производные
dg (t ) / dt d 2 g (t ) / dt 2 .... d m g (t ) / dt m 0 , тогда
C0 Wg (0), a C1
Сm d m g (t )
dg (t ) С2 d 2 g (t )
......
0
dt
2! dt 2
m! dt m
В данном случае C0 Wg (0), – значение установившейся ошибки в замкнутой системе.
Если g(f) = t, то dg(t)/dt =1, a d g (t ) / dt ... d g (t ) / dt
2
2
m
0; ; коэффициенты
m
C0 Wg (0), ;
dW g ( s)
2
2
m
m
C1
, a C 2 d g (t ) / dt ... C m d g (t ) / dt 0 и т. д.
ds s 0
Коэффициент С0 называют коэффициентом статической или позиционной ошибки;
коэффициент С1 – коэффициентом скоростной ошибки, С2 – коэффициентом ошибки от
ускорения.
В статических системах коэффициент С0 отличен от нуля. В системах с астатизмом
первого порядка С0=0, C1 0 . В системах с астатизмом второго порядка С0=С1=0; C2 0
. Увеличение числа интегрирующих звеньев приводит к повышению порядка астатизма
системы, т. е. к нулевым значениям нескольких коэффициентов ошибок, но при этом
усложняется обеспечение устойчивости системы.
Контрольные вопросы:
1. Какую задачу приходится решать при исследовании систем автоматического
регулирования?
2. Оценка качества регулирования в установившемся режиме?
3. Коэффициенты ошибок
22-ЛЕКЦИЯ
Оценка качества переходного процесса при воздействии ступенчатой функции.
Корневые методы оценки качества регулирования
План:
1. Прямые оценки качества
2. Корневые методы оценки качества регулирования
3. Колебательность системы
Переходный процесс в системе зависит не только от свойств САУ, но и от характера
внешнего воздействия, которое в общем случае может быть сложной функцией времени.
Поведение системы рассматривают при следующих типовых воздействиях: единичной
ступенчатой функции 1(f), импульсной (t ) и гармонической функций. Прямые оценки
качества получают по кривой переходной характеристики h(t), т. е. при воздействии
единичной ступенчатой функции
I при t 0,
g (t ) I (t )
0 при t 0
и нулевых начальных условиях.
Эту характеристику можно построить для выходной величины или для отклонения
св (t ) (рис.22.1,а,б). К прямым оценкам качества относят:
1. Время регулирования t p – минимальное время, по истечении которого
регулируемая величина будет оставаться близкой к установившемуся значению с заданной
точностью
ñâ (t ) 0 при t t p
или
h(t ) hóñò
(22.1)
где – постоянная величина, значение которой нужно оговаривать (задается величина
в процентах от установившегося значения выходной величины h уст ).
Рис. 22.1
2. Перерегулирование – максимальное отклонение переходной характеристики от
установившегося значения выходной величины, выраженное в относительных единицах
или процентах:
hmax 1 h уст
h уст
100
где hmax 1 – значение первого максимума, или
СВ (t ) max 1
hуст
100
СВ (t ) max 1
СВ (0)
100.
Допустимое значение перерегулирования в каждом конкретном случае будет
подсказано опытом эксплуатации системы, обычно 10 30% , но в некоторых случаях
допускается и до 70%. Иногда перерегулирование недопустимо совсем.
3. Частоту колебаний
переходных характеристик.
2 / T ,
где Т – период колебаний для колебательных
4. Число колебаний n, которое имеет переходная характеристика h(t) или св (t ) за
время регулирования (tp).
При проектировании систем чаще всего допускают n 1 2 , а иногда и до 3– 4, но
в некоторых случаях колебания в системе недопустимы.
5. Время достижения первого максимума tmax.
6. Время нарастания переходного процесса tH – абсциссу первой точки пересечения
кривой переходной характеристики h(t) с уровнем установившегося значения h уст или кривой отклонения св (t ) с осью абсцисс.
8. Декремент затухания
,
равный отношению модулей двух смежных
перерегулирований:
hmax 1 hуст / hmax 2 hуст .
Перечисленные показатели качества могут быть дополнены другими, но это
обусловлено спецификой конкретной системы.
Определение приведенных выше прямых оценок качества переходного процесса
проиллюстрировано на рис.22.1, а, б.
Рис.22.2.
Переходные процессы, возникающие в системах при скачкообразных воздействиях,
принято делить на три группы: монотонные, апериодические и колебательные. У
монотонных процессов первая производная выходной величины x(t) не меняет знак (кривая
а на рис.22.2), у апериодических знак производной x(t) меняется не более одного раза
(кривая б на х рис. 22.2), а у колебательных – первая производная x(t) меняет свой знак
периодически (теоретически бесконечное число раз) (кривая в на рис. 22.2).
Нужно отметить, что в настоящее время при бурном развитии вычислительной
техники трудности, связанные с расчетом переходных процессов и выбором возможных
вариаций параметров системы, существенно уменьшаются, поэтому роль прямых оценок
качества при проектировании САУ возрастает.
Корневые методы оценки качества регулирования
Известно, что характер переходного процесса в системе определяют по ее реакции
на единичное ступенчатое воздействие. Переходная характеристика h(t) системы может
быть вычислена с помощью обратного преобразования Лапласа (по формулам разложения
Хевисайда):
P( s)
1
h(t ) L1 Wgx ( s ) L1
.
sD ( s )
s
Если D(s) не имеет кратных корней, то
h(t )
P(0) n P( si ) si t
e ,
D(0) i 1 si D l ( si )
(22.2)
где si – корни характеристического полинома замкнутой системы D(s)=0; D'( si )=dD(s)/ds|
s si – первая производная характеристического полинома D(s) по s при s= si .
Из (22.2) видно, что на характер переходного процесса влияют и числитель и
знаменатель передаточной функции замкнутой системы Wgx (s) . Если числитель Wgx (s)
не имеет нулей, т. е. представляет собой постоянную величину, то характер переходных
процессов можно оценить по ее полюсам, т. е. корням характеристического уравнения
замкнутой САУ D(s)=0.
Для приближенной оценки качества переходного процесса в системе нужно на
плоскости корней s выделить область, в которой располагаются корни ее характеристического уравнения. Чаще всего эту область представляют трапецией (рис.22.3).
Корни характеристического уравнения располагаются внутри этой трапеции ABCD, на ее
сторонах и основаниях хотя бы по одному корню, а вне ее – ни одного. Для выделения этой
области на плоскости корней вычисляют параметры: степень устойчивости , колебательность
мнимой оси.
и значение
вещественной части максимально удаленного корня от
Рис. 22.3
Степенью устойчивости
называют расстояние от
мнимой оси до ближайшего корня или ближайшей пары
сопряженных комплексных корней. Степень устойчивости
определяет ближайшее к мнимой оси основание трапеции AD
(рис.22.3).
Пусть общее решение дифференциального уравнения
системы
n
x(t ) Ci e si t
(22.3)
i 1
где si – корни характеристического уравнения D(s) = 0.
Составляющая этого решения, определяемая степенью устойчивости, запишется в виде
x (t ) C e t
(22.4)
x (t ) C e t sin t
(22.5)
для случая вещественных корней или
для случая, когда среди корней есть пара комплексно-сопряженных.
В большинстве случаев переходный процесс можно считать закончившимся тогда,
когда затухнет составляющая переходного процесса, определяемая степенью устойчивости,
т. е. порядок величины времени затухания процесса можно грубо оценить по наиболее
медленно затухающей составляющей x (t ) [см. (22.4), (22.5)]. В случае, когда ближайшим
к мнимой оси является вещественный корень, из (22.3) можно получить следующую
зависимость: t
ln
1
. Если принять, например, =0,05, то время переходного
1
3 / . В том случае, когда ближайшей к мнимой оси является пара
0,05
комплексных корней, из (22.4) можно найти верхнюю границу времени переходного
1 1
процесса: t ln
процесса t
1
1
ln
Если сместить мнимую ось влево на величину
, тогда один корень окажется на
мнимой оси, а система – на границе устойчивости. Это соответствует обращению в нуль
старшего определителя Гурвица: n an n 1 0 . Это условие дает уравнение, по
которому, задаваясь коэффициентами, можно определить или решить обратную задачу.
Пусть характеристическое уравнение системы
D( s ) a0 s n a1s n 1 ... an 1s an 0
Введем новую переменную z s . Подставив значение
s z в уравнение D(s)=0,
получим новое смещенное уравнение:
A0 z n A1 z n 1 ... An 1 z An 0
(22.6)
где
Ai
1 d n i D
(n i )! ds n i s
(22.7)
Если в смещенном уравнении окажется An 0, то ближайшим к мнимой оси
окажется нулевой корень, а если An 0, то пара сопряженных комплексных корней.
Условие границы устойчивости для системы, описанной уравнением (22.6), по критерию
Гурвица n 1 0 при соблюдении всех остальных условий устойчивости Гурвица.
Колебательностью системы называют тангенс угла, образованного
отрицательной вещественной полуосью и лучом из начала координат к корню, у которого
отношение мнимой части к действительной максимально (рис.15.1):
tg ( / ) max ,
где
– значение мнимой части корней D(s);
– действительная часть.
(22.8)
При известных параметрах системы можно определять значение колебательности
(задача анализа колебательности) или решать обратную задачу – задачу синтеза САУ по
заданной колебательности. Для этого в характеристическое уравнение системы вводится
замена s jze
jM
, равноценная повороту мнимой оси на угол ( / 2 M ) , при этом пара
сопряженных комплексных корней окажется на мнимой оси, а фиктивная система – на
границе устойчивости. Колебательность является оценкой переходного процесса сверху,
при увеличении возрастает число колебаний n за время регулирования и возрастает
перерегулирование.
Реальный переходный процесс может иметь значительно лучшее качество.
Запишем смещенное характеристическое уравнение:
B0 z n B1 z n 1 ... Bn 1 z Bn 0
(22.9)
где
Bi j n i e j ( n i )M ai .
(22.10)
В (22.9) часть коэффициентов – комплексные числа.
Так как фиктивная система находится на границе устойчивости, то (22.10) имеет
пару сопряженных мнимых корней si j i ji .
Если в (22.10) подставить
j вместо z и разделить смещенный характеристический
полином на мнимую и действительную части, то их можно поочередно приравнять нулю,
получив при этом систему двух уравнений
и( M , i ) 0;
Исключив из этой системы
( M , i ) 0;
i , получим искомое значение M и tg M .
Эту задачу можно решать, используя свойства корней алгебраических уравнений по
формулам Виета.
Контрольные вопросы:
1. Что относится к прямым оценкам качества?
2. Корневые методы оценки качества регулирования
3. Колебательность системы
23-ЛЕКЦИЯ
Интегральные оценки качества переходных процессов
План:
1. Интегральные оценки качества переходных процессов
2. Интегральная квадратичная оценка
3. Методика расчета системы по минимуму обобщенной квадратичной оценки
Интегральные оценки качества являются интегралами по времени от некоторых
функций переходного процесса свободной составляющей выходной величины xñâ (t ) или
ошибки ñâ (t ) . Цель использования таких критериев состоит в том, чтобы получить общую
оценку быстродействия и отклонения регулируемой величины от установившегося
значения. Широко используются линейные и квадратичные интегральные оценки.
Линейные оценки вычисляются по формуле
J 0 e t t n ñâ
(23.1)
0
Рис. 23.1
Рис. 23.2
Однако чаще используют моменты i-го порядка, т. е. оценки вида
J 00 ñâ (t )dt;
(23.2)
0
J 01 t ñâ (t )dt;
(23.3)
0
J 0n t n ñâ (t )dt.
0
(23.4)
Простейшей из этих оценок является J 00 (23.2). Если система устойчива, то
lim ñâ (t ) 0 , интеграл J 00 стремится к конечному значению, равному площади под
t
ñâ(t ) (рис. 23.1). Чем выше быстродействие системы, тем меньше величина J 00 ,
поэтому параметры системы следует выбирать так, чтобы J 00 стремился к минимуму, т. е.
d J 00 /dA=0, где А - варьируемый параметр системы. Недостатком этой оценки является то,
кривой
что она применима к монотонным или апериодическим процессам. При колебательном
процессе (рис. 23.2) площади, ограниченные
ñâ(t ) , складывают алгебраически и
минимуму J 00 может соответствовать процесс с большим числом колебаний n, т. е., с
малым быстродействием и даже с незатухающими колебаниями.
Для
ñâ (s ) изображение по Лапласу
E ( s) e st ñâ (t )dt
0
Сравнивая это выражение с (4.47) для J 00 , можно записать
J 00 ñâ (t )dt Eñâ (0).
(23.5)
0
Разложим e
st
в ряд по степеням st:
e st 1 st 0,5 s 2t 2 .....
(23.6)
Подставим (23.6) в выражение для определения Eñâ (s ) , т. е.
0
0
0
0
Eñâ ( s) e st ñâ (t )dt ñâ (t )dt s t ñâ (t )dt 0,5s 2 t 2 ñâ (t )dt
(23.7)
J 00 sJ 01 0,5s 2 J 02 ....
Если разложить Eñâ (s ) по степеням s в ряд:
dEñâ
d 2 Eñâ
Eñâ ( s) Eñâ (0) (
) s 0 s 0,5(
) s 0 ....,
ds
ds2
(23.8)
то, сопоставляя (23.7) и (23.8), можно сделать следующее заключение, приравнивая
выражения при равных степенях s:
J 00 Eñâ (0);
0
J 01 (
dEÑÂ
)s 0 ;
ds
(23.9)
d 2 EÑÂ
J 01 (
)s 0 ;
ds2
(23.10)
…………………………………………………….
J 01 (1)(
d n EÑÂ
)s 0 .
dsn
(23.11)
Если сравнить результаты (23.8), (23.9)-(23.11) с коэффициентами ошибок,
n
приведенными в § 4.2, то J 00 C0 ; J 01 ( 1)C1 ;........; J 0 n ( 1) Cn , где С0, С1, …,
Cn – коэффициенты ошибок.
Квадратичные интегральные оценки вычисляются по формулам
2
J 20 ÑÂ
(t )dt;
(23.12)
0
2
2
J 21 ÑÂ
(t ) 12 ÑÂ
(t ) dt;
(23.13)
0
……………………………………………………..
2
2
(n)
J 2 n СВ
(t ) 12 СВ
(t ) n2 СВ
(t ) dt;
2
(23.14)
0
где 1 ,
2 , ……., n , – постоянные величины.
Оценки J 21 , ……, J 2 n называют обобщенными квадратичными оценками.
Геометрический смысл интегральной квадратичной оценки пояснен на рис. 23.3.
Выбирая параметры системы по минимуму квадратичной интегральной оценки J 20 ,
приближаем кривую
ÑÂ (t ) к осям ÑÂ и t.
Методы вычисления этих оценок предложены А. И. Мандельштамом и Н. Д.
Папалекси в 1909 г. В 1937 г. акад. А. А. Харкевич применил эту оценку для исследования
режимов работы усилителей, в 1948 г. А. А. Красовский и А. А. Фельдбаум использовали
ее для исследования качества линейных систем автоматического регулирования.
Рассмотрим
ÑÂ (t ) hóñò
методы
вычисления
h(t ) . По определению,
квадратичных
1
Lh(t ) H ( s) Wgh ( s).
s
интегральных
оценок
По теореме о предельных переходах,
hóñò lim h(t ) lim sH ( s) Wgh (0);
t
t
следовательно,
1
EÑÂ ( s) Wgh (0) Wgh ( s).
s
Поскольку Wgh (s) – дробно-рациональная функция, то и H(s) можно записать в виде
. дробно-рациональной функции:
b0 s m b1s m 1 ... bm 1s bm
H ( s)
.
a0 s n a1s n 1 ... an 1s an
(23.15)
Рис. 23.3
При m<n оценку J 20 , (23.15) можно вычислить, используя коэффициенты b0 , …,
bm , и a0 , ..., an (4.60), по формулам, при веденным ниже без вывода [4]:
2
J 20 СВ
(t )dt
0
где
.
b b
1
( B0 0 B1 1 ... Bm 2 m 2 Bm 1 m 1 Bm m ) m 2m 1
2
2a n
an
(23.16)
- определитель Гурвица, составленный из коэффициентов:
an
a n2
0
a n 1
0
an
a n2
....
0
0
0
a n 1
....
0
.
.
.
.
.
0
0
0
a n4
....
0
a n 3 ....
0
.... a1
.
(23.17)
в котором все коэффициенты с меньшим индексом 0 и большим я заменяют нулями.
Определители 0 ,..., m получают из (23.17) заменой столбца (v+1) столбцом an 1 , an 0,
….,0, a v=0, 1,.....,m.
Коэффициенты B0 , B1 , ..., Bm 1 , Bm определяют как
B1 bm2 1 2bm bm 2 ;
2bm 1 2bm 1 ... 2(1) bm bm 2 ;
(23.18)
2
b m b0 .
B0 bm2 ;
B bm2
Интегральную квадратичную оценку J 20 , можно вычислять по заданной частотной
характеристике замкнутой системы.
Пусть E ( j ) - изображение Фурье для функции
ñâ (t ) , на основании теоремы
свертки в комплексной области для L ñâ (t ) ñâ (t ) можно записать
J 20
0
2
ñâ (t )dt
17 при s=0
1
2
EÑÂ ( j ) d
0
ñâ (t ) hóñò h(t ) EÑÂ ( j )
1
jWgh (0) Wgh ( j )
j
(23.19)
(23.20)
где Wgh ( j ) – комплексный коэффициент усиления замкнутой системы.
Таким образом, по (23.19) и (23.20) можно вычислить J 20 . Выражение (23.19) есть
формула Рэлея*.
Существуют таблицы расчета интеграла J 20 в функции коэффициентов b0 , …, bm и
a0 , …, an изображения по Лапласу сигнала ошибки EÑÂ (s ) для m n 1 и до n 10 .
При выборе параметров системы по минимуму оценки J 20 часто получают
нежелательную колебательность процесса, так как приближение процесса h(t) к идеальному
скачку вызывает резкое увеличение начальной скорости, что, в свою очередь, может
вызвать высокое перерегулирование, уменьшив при этом запас устойчивости. В
обобщенных квадратичных оценках J 21 ,…, J 2 n накладывают ограничение не только на
(t ) , но и на скорость отклонения (t ) в J 21 , а также и на
производные второго, третьего и высших порядков в J 22 ,…, J 2 n , что означает
приближение кривой не к ступенчатой функции, а к экспоненте в случае J 21 и к более
плавной, но сложной кривой в случае использования J 22 ,…, J 2 n . При выборе параметров
САУ по минимуму J 21 ,…, J 2 n , существен выбор постоянных 1 ,…., n определяющих вес
величину отклонения
производных в обобщенных квадратичных оценках (4.58), (4.59). Значительное увеличение
1 ,…., n приводит к отсутствию перерегулирования, но увеличивает время регулирования.
При малых 1 ,…., n уменьшение колебательности будет незначительным. Выбор 1 ,….,
n осуществляется с учетом постоянной времени экстремали, к которой целесообразно
приближать процесс.
Остановимся на методике расчета системы по минимуму обобщенной квадратичной
оценки:
2
2
J 21 ñâ
(t ) 12 ñâ
(t ) dt
0
Этот интеграл можно представить в виде суммы двух интегралов:
0
0
J 21 св (t ) 1 св (t ) dt 2 1 св (t ) св (t )dt св (t ) 1 св (t ) dt 2 1 св (t ) св (t )dt.
2
0
2
0
Если система устойчива, то lim св (t ) 0 , тогда
t
2 1 св (t )d св (t ) 1 cв2 (t ) 1 1 cв2 (0)
0
0
Кроме того, интеграл J 21 будет иметь минимально возможное значение
2
J 21
min 1 св (0)
(23.21)
св (t ) 1 св (t ) 0.
(23.22)
1d св (t ) / dt св (t ) 0
(23.23)
при
Если
то решение дифференциального уравнения (23.23)
cв (t ) cв (0)e t /
1
(23.24)
является оптимальным по минимуму (экстремальным) переходным процессом (где
1 –
постоянная времени этого процесса).
При выборе параметров системы по минимуму J 21 обычно имеет место отклонение
J 21
min от наименьшего значения J 21 min , т.е. J 21 min J 21 min 0.
А. А. Фельдбаумом [10] было показано, что переходный процесс будет отличаться
от экстремального на величину, меньшую
/ 1 , т.е.
св (t ) / 1 .
По величине
(23.25)
можно оценить отклонение истинного переходного процесса ñâ (t ) от
экстремального. При увеличении порядка системы увеличивается и ширина зоны
/ 1
, при этом уменьшается точность оценки качества системы (приближения переходного
процесса к экстремали); во избежание этого используют оценки вида (23.25). Величину 1
задают по требуемому времени регулирования t p , т. е. t p / 6 1 t p / 3 .
Следует заметить, что задача выбора параметров по минимуму J 20 или J 21
решается аналитически лишь в несложных случаях для САУ невысокого порядка. В
противном случае расчеты существенно усложняются и задачу следует решать численно на
ЦВМ.
Рассмотрим примеры выбора оптимального значения какого-либо параметра
системы по минимуму J 20 и J 21 .
Контрольные вопросы:
1. От чего возникает нежелательная колебательность процесса?
2. На какую величину переходный процесс будет отличаться от экстремального?
3. Интегральные оценки качества переходных процессов
24-ЛЕКЦИЯ
Частотные методы оценки качества регулирования
План:
1. Частотные методы исследования систем управления
2. Основные свойства вещественных частотных характеристик и соответствующих
им переходных процессов
Частотные методы исследования систем управления широко используют в
инженерной практике. Они основаны на привычном для инженеров графическом
изображении динамических характеристик системы, поэтому нашли применение при расчетах систем автоматического управления и позволили разработать ряд удобных
инженерных методов анализа и синтеза систем автоматического регулирования. В
большую роль в пропаганде и развитии частотных методов сыграли работы В. В.
Солодовникова. В них приведены метод оценки качества по вещественным частотным
характеристикам, метод построения переходных процессов по вещественным
трапецеидальным характеристикам при ступенчатых воздействиях, а также метод синтеза
корректирующих устройств. В работах была доказана возможность применения частотных
методов к различным системам с распределенными параметрами и с запаздыванием.
Применение этих методов позволяет определить такие важные показатели качества, как
быстродействие, перерегулирование, колебательность процесса. Эти вопросы хорошо
освещены в литературе, и имеется большое количество вспомогательных таблиц и
графиков, что в значительной степени упростило инженерные расчеты.
Прежде всего остановимся на аналитической зависимости между переходной
характеристикой и частотными характеристиками системы. Если на линейную систему
воздействует гармонический сигнал, то и установившееся значение выходной величины
будет гармоническим:
X ( j ) Wgx ( j )G( j ),
(24.1)
где X ( j ) – изображение выходной величины x(t) по Фурье; G ( j ) – изображение
входной величины g(t) по Фурье; Wgx (/со) – комплексный коэффициент усиления
замкнутой системы.
При воздействии на систему единичной ступенчатой функции g(t)=1(t) выходная
величина, являющаяся переходной характеристикой системы h(t), определяется через
вещественную частотную или мнимую частотную характеристику замкнутой системы:
x(t ) h(t )
2 P( )
0
sin td.
(24.2)
где P ( ) – вещественная частотная характеристика замкнутой САУ;
x(t ) h(t )
2 Q( )
0
costd P(0).
(24.3)
где Q( ) – мнимая частотная характеристика замкнутой системы.
Определение переходной характеристики по (24.2), (24.3) возможно лишь
численными методами с применением ЦВМ. Но возможен и другой путь, связанный с
аппроксимацией вещественной и мнимой частотных характеристик линейно-кусочными
функциями. Это позволяет получить достаточно удобные выражения для приближенного
построения переходной характеристики.
Если на систему действует произвольное возмущение, то переходный процесс
определяется по обобщенным вещественной и мнимой характеристикам:
Pîá ( ) Re Wgx ( j )G ( j ) ;
Qîá ( ) lm Wgx ( j )G ( j ) .
(24.4)
где G( j ) g (t )e jt dt – изображение входного воздействия g(t) по Фурье. При этом
0
необходимо, чтобы полюсы функции располагались слева от мнимой оси.
Рассмотрим основные свойства вещественных частотных характеристик и
соответствующих им переходных процессов. Из (24.2) следуют основные свойства P ( )
и h(t ) . Приведем их без доказательств.
1. Свойство линейности: если вещественную частотную характеристику можно
представить суммой
i n
2 Pi ( )
hi (t )
sin td ,
0
P ( ) Pi ( );
(24.5)
то и переходный процесс h(t ) может быть представлен суммой составляющих:
n
h(t ) hi (t ).
(24.6)
i 1
2. Соответствие масштабов по оси ординат для P ( ) и h(t ) . Если умножить P ( )
на постоянный множитель а, то соответствующие значения h(t ) тоже умножаются на этот
множитель а.
Рис. 24.1
Рис. 24.2
3. Соответствие масштабов по оси абсцисс для P ( ) и h(t ) . Если аргумент со в
соответствующем выражении частот ной характеристики умножить на постоянное число
(рис. 24.1, а), то аргумент и в соответствующем выражении переходного процесса будет
делиться на это число (рис. 24.1, б), т. е.
h(t / a)
2 P(a )
0
sin td.
4.
Начальное значение вещественной
конечному значению переходной характеристики:
(24.7)
частотной
характеристики
равно
характеристики
равно
lim P( ) lim x(t ) lim h(t ).
Начальное значение мнимой частотной характеристики Q(0)=0.
5.
Конечное значение вещественной частотной
начальному значению оригинала переходной характеристики:
Представляют интерес разрывы непрерывности и пики в вещественной частотной
характеристике. Предположим, что при
1 вещественная частотная характеристика
имеет разрыв непрерывности P(1 ) , при этом характеристическое уравнение системы
будет иметь мнимый корень si j1 , т. е. в системе устанавливаются незатухающие гармонические колебания, если остальные корни левые. Характеристика для этого случая
показана на рис. 24.2, а. По-видимому, высокий и острый пик частотной характеристики, за
которым P ( ) переходит через нуль, при частоте, близкой к
1 соответствует медленно
затухающим колебаниям (рис. 24.2, б).
Рис. 24.3
6. Чтобы переходная характеристика системы имела пере регулирование, не превышающее
18% 18% , вещественная частотная характеристика должна быть положительной
невозрастающей функцией частоты (рис. 24.3), т. е. P( ) 0, dP( ) / d 0 .
7. Условия монотонного протекания переходного процесса. Чтобы переходный
процесс имел монотонный характер, достаточно, чтобы соответствующая ему
вещественная частотная характеристика P ( ) была положительной, непрерывной
функцией частоты с отрицательной, убывающей по абсолютному значению производной
(рис. 24.4, а, б), т. е.
Рис. 24.4
P( ) 0, dP( ) / d 0
8.
Определение наибольшего значения перерегулирования
max переходного
процесса по максимуму вещественной частотной характеристики P ( ) (рис. 24.5):
max 1,18 Pmax P(0)/ P(0).
(24.8)
где Pmax – максимальное значение P ( ) ; Р(0)–начальное значение P( 0) .
Рис. 24.5
Рис. 24.6
9. Если вещественная частотная характеристика близка к трапецеидальной, т. е.
может быть аппроксимирована трапецией с диапазоном частот
2 и коэффициентом
1 / 2 (рис. 24.6), то время регулирования переходного процесса системы
заключено в пределах / 2 t p 4 / 2 . Оценить время регулирования t p и
наклона
перерегулирование можно по кривым, приведенным на рис.24.7. Это применимо для систем
с невозрастающей вещественной частотной характеристикой.
Рис. 24.7
Если вещественная частотная характеристика P ( ) имеет максимум Pmax , то
в и время регулирования оценивают по кривым рис. 24.8, а, б в
зависимости от отношения Pmax /P(0). При этом время регулирования заключено в пределах
3 / 2 t p 8 / 2 .
перерегулирование
Рис. 24.8
Остановимся на приближенном методе построения графиков переходных процессов
в системе по вещественным частотным характеристикам при воздействии единичной
функции g(t)=1(t) и нулевых начальных условиях.
Контрольные вопросы:
1. Какие показатели позволяют определить частотные методы исследования систем
управления?
2. Перечислите основные свойства вещественных частотных характеристик и
соответствующих им переходных процессов?
3. Основные свойства соответствующих им переходных процессов?
25-ЛЕКЦИЯ
Обеспечение устойчивости, повышение качества регулирования и синтез линейных
автоматических систем
План:
1. Общие положения. Корректирующие устройства
2. Преобразовательные элементы
3. Повышение точности в установившихся режимах
Общие положения
Первой проблемой, которая решалась теорией автоматического регулирования,
было обеспечение устойчивости автоматических систем. Позднее центральной задачей
стало достижение необходимого качества регулирования. Систематизация и обобщение
накопленных знаний привели к созданию методов научного проектирования (синтеза)
систем с заданными показателями точности регулирования и быстродействия.
В настоящей лекции излагаются основные сведения о способах и средствах
улучшения свойств линейных систем автоматического регулирования. Затем
рассматриваются наиболее употребительные методы их синтеза.
Проблема обеспечения требуемых свойств линейных автоматических систем весьма
сложна. В ней могут быть выделены прежде всего следующие частные задачи: обеспечение
устойчивости (стабилизация); повышение запаса устойчивости (демпфирование);
повышение точности регулирования в установившихся режимах (уменьшение или
устранение статической ошибки воспроизведения задающего воздействия, уменьшение или
устранение влияния постоянных возмущений); улучшение переходных процессов
(увеличение быстродействия, максимальное уменьшение динамических ошибок
воспроизведения воздействия и от возмущений).
Иногда несколько частных задач могут быть решены совместно, в других случаях
они оказываются противоречивыми. В зависимости от назначения системы и
предъявляемых к ней требований одни задачи становятся основными, а другие отодвигаются на второй план или снимаются.
Всякая система автоматического регулирования должна быть устойчивой. Однако
запас устойчивости в системе стабилизации (с постоянным или редко изменяемым
задающим воздействием) может быть значительно меньше, чем в следящей системе (с
непрерывно или часто изменяющимся задающим воздействием). Если параметры
регулируемого объекта определены приближенно или могут изменяться в процессе эксплуатации системы, то необходим больший запас устойчивости, чем при точно установленных
и неизменных параметрах.
В системах стабилизации обеспечивается максимально возможное или хотя бы
необходимое уменьшение влияния возмущений. В следящих системах, кроме того,
обеспечивается максимально возможное или необходимое быстродействие и уменьшение
как статических, так и динамических ошибок воспроизведения задающего воздействия.
Требования в отношении быстродействия должны соответствовать мощности
исполнительного элемента регулятора. Использование элементов для нужных
преобразований сигнала управления не должно приводить к существенному повышению
уровня помех, присутствующих в задающем воздействии.
Когда устойчивость и необходимое качество не могут быть достигнуты простым
изменением параметров системы (коэффициентов передачи, постоянных времени
отдельных звеньев), тогда эта задача решается введением в систему дополнительных
устройств, называемых корректирующими.
Корректирующие устройства
Корректирующее устройство включают в систему автоматического регулирования
по-разному. Возможно последовательное включение корректирующего устройства в
прямую цепь системы (рис. 25.1, а), в этом случае оно называется последовательным
корректирующим устройством. Его передаточная функция на рис. 25.1, а обозначена Wk1. .
Последовательное корректирующее устройство включают непосредственно после
датчика рассогласования или же после предварительного усилителя. Второй вариант
включения используют чаще. Дело в том, что уровень сигнала рассогласования обычно
весьма мал н корректирующее устройство снижает чаще всего уровень сигнала, поэтому
при первом варианте включения последовательного корректирующего устройства
потребуется иметь предварительный усилитель значительно более высокой
чувствительности, чем при втором варианте.
Применение последовательных корректирующих устройств наиболее удобно в
системах, у которых сигнал управления представляет собой напряжение постоянного тока.
В этих случаях корректирующее устройство выполняют обычно из пассивных
электрических четырехполюсников, обеспечивающих разнообразное преобразование
сигнала. Еще большие возможности дают активные электрические четырехполюсники постоянного тока.
В системах, у которых сигналом управления является модулированное напряжение
переменного тока, последовательные корректирующие устройства менее удобны по той
причине, что электрические четырехполюсники переменного тока имеют существенные
недостатки и применяются редко, для использования же пассивных четырехполюсников
постоянного тока оказываются необходимыми дополнительные элементы (рис. 25.2).
Модулированный сигнал переменного тока сначала выпрямляется фазочувствительным
демодулятором ФД и затем фильтром Ф отфильтровываются высшие гармоники. Только
после
этого
осуществляется
соответствующее
преобразование
сигнала
четырехполюсником постоянного тока. Преобразованный сигнал постоянного тока вновь
превращается модулятором М в модулированный сигнал переменного тока, если это
необходимо для действия последующих элементов системы.
а)
x
g
W3
Wk1
W2
W1
y
-
б)
x
W3
g
-
-
W2
W1
y
Wk2
Рис. 25.1
Параллельно-встречное корректирующее устройство показано на рис. 25.1,б. В
данном случае корректирующее устройство является обратной- связью, чаще всего'
отрицательной, которая охватывает один из элементов прямой цепи системы. Этим
элементом обычно является исполнительный элемент или выходной каскад усилителя
(усилитель мощности). Такое корректирующее устройство называют параллельным. Его
передаточную функцию будем обозначать Wk 2 .
ФД
Ф
ЧПТ
M
Рис. 25.2
Передаточная функция участка цепи с параллельным корректирующим устройством
W2 W2 /(1 W2Wk 2 ).
(25.1)
Обычно в достаточно широком и существенном для качества системы диапазоне
частот справедливо неравенство
W2 ( j )Wk 2 ( j ) 1.
(25.2)
Тогда в этом диапазоне частот
W2 ( j ) 1 / Wk 2 ( j ).
(25.3)
Таким образом, при удовлетворении неравенства (25.2) свойства участка цепи с
параллельным корректирующим устройством определяются только лишь свойствами этого
корректирующего устройства.
Указанное обстоятельство является большим достоинством параллельного
корректирующего устройства. При удовлетворении неравенства (25.2) свойства участка W2
прямой цепи, Охваченного параллельным корректирующим устройством, и их изменения в
процессе действия системы ре влияют на ее свойства. Несущественные нелинейности этого
участка и изменения его параметров (коэффициентов передаточной функции W 2) не
сказываются на динамических свойствах системы. Это справедливо только при неизменных
параметрах самого параллельного корректирующего устройства.
Достоинство данного корректирующего устройства также в том, что его вход
подключен к выходу исполнительного элемента или усилителя мощности, т. е. к выходу
мощного элемента с высоким уровнем сигнала. Поэтому в качестве параллельных
корректирующих устройств могут быть использованы даже достаточно мощные элементы.
Но широко используют и пассивные четырехполюсники постоянного тока, и тогда весьма
просто обеспечить сложное преобразование сигнала участком цепи с параллельным
корректирующим устройством.
Следует заметить, что влияние местных обратных связей, реализующих
параллельные корректирующие устройства, весьма разнообразно. Корректирующие
обратные связи делятся на жесткие и гибкие. Жесткая обратная связь действует на систему
как в переходном, так и в установившемся режиме, т. е. Wæîñ (0) 0 , и реализуется она
безынерционным или инерционным звеном. Гибкая обратная связь действует лишь в
переходных режимах, реализуется она или чисто дифференцирующим с передаточной
функцией
W0 ( s ) k0 s,
или инерционно-дифференцирующим звеном
W0 ( s) k0 s /(T0 s 1).
Предположим, что звено с передаточной функцией W охвачено отрицательной обратной
связью с передаточной функцией W0. Тогда эквивалентная передаточная функция этого
участка цепи Wý W /(1 WW0 ) .
Наиболее характерны следующие случаи. Пусть апериодическое звено охвачено
жесткой обратной связью, т. е. W k /(Ts 1) и W0 k0 . В этом случае
Wý k /(Ts 1 kk0 ) ký /(Tý s 1),
(25.4)
где k ý k /(1 kk0 ) и Tý T /(1 kk0 ) .
Таким образом, жесткая отрицательная обратная связь не изменяет структуру
апериодического звена, но уменьшает его инерционность, т. е. уменьшает постоянную
времени. Одновременно уменьшается передаточный коэффициент звена.
Если обратная связь гибкая, т. е. W0 k0 s , то
Wý k /(Ts 1 kk0 s) k /(Tý s 1),
где Tý T kk0 .
(25.5)
Следовательно, гибкая отрицательная обратная связь не изменяет структуру и не
влияет на передаточный коэффициент апериодического звена. Она лишь увеличивает его
инерционность – его постоянную времени.
Пусть интегрирующее звено охвачено жесткой обратной связью W k / s и
W0 k0 . В этом случае
Wý k /( s kk0 ) k ý /(Tý s 1),
(25.6)
где k ý 1 / k0 и Tý 1 /( kk0 ).
Таким образом, жесткая отрицательная обратная связь превращает интегрирующее
звено в апериодическое.
Если обратная связь гибкая, т. е. W0 k0 s , то
Wý k /( s kk0 s k ý / s,
(25.7)
где k ý k /(1 kk0 ).
Гибкая обратная связь не изменяет структуру интегрирующего звена, но уменьшает
его передаточный коэффициент (увеличивает постоянную времени интегрирования
Tý 1 / k ý .
Предположим, что колебательное звено охвачено жесткой обратной связью, т. е.
W k /(T 2 s 2 2Ts 1) и W0 k0 . При этом
Wý k /(T 2 s 2 2Ts 1 kk0 ) k ý /(Tý2 s 2 2 ýTý s 1),
где k ý k /(1 kk0 ); Tý T / 1 kk0 ;
(25.8)
ý / 1 kk0 .
Жесткая отрицательная обратная связь не изменяет структуру колебательного звена,
но уменьшает постоянную времени и коэффициент демпфирования. Уменьшается также
передаточный коэффициент звена.
При гибкой обратной связи возможны два варианта. Если
k 0 2T (1 ) / k ,
(25.9)
то
Wý k / T 2 s 2 2Ts 1 kk0 s k / T 2 s 2 2 ýTs 1 ,
где
(25.10)
ý kk0 /( 2T ).
Слабая отрицательная гибкая связь не изменяет структуру колебательного звена и
лишь увеличивает его коэффициент Демпфирования.
Если же
k0 2T (1 ) / k ,
(25.11)
то
Wý k /(T1s 1)(T2 s 1)
где T1 0,5(r
(25.12)
r 2 4T 2 ); T1 0,5(r r 2 4T 2 ); r 2T kk0 .
Сильная отрицательная гибкая связь превращает
последовательное соединение двух апериодических звеньев.
колебательное
звено
в
Еще один случай: идеальное усилительное звено охвачено инерционной обратной
связью, т.e. W k и W0 k0 /(T0 s 1) .Тогда
Wý k (T0 s 1) /(T0 s 1 kk0 ) ký (T0 s 1),
(25.I3)
где k ý k /(1 kk0 ); Tý T0 (1 kk0 ).
Таким образом, инерционная отрицательная обратная связь превращает идеальное
усилительное звено в реальное форсирующее звено, создающее производные от входного
сигнала.
Из рассмотренных примеров можно, заключить, что даже простейшие
отрицательные обратные связи могут существенно изменить свойства типовых
динамических звеньев. Еще больщий. эффект дают сложные отрицательные и
положительные обратные связи. В [1, 3] подробно изложено влияние сложных обратных
связей на свойства типовых динамических звеньев и их соединений. Следовательно, если
основные элементы регулятора по своей физической природе позволяют создать обратные
связи, то динамические свойства этих элементов зачастую могут быть изменены в нужном
направлении.
Параллельное корректирующее устройство – это третий вариант включения
устройства в САУ (см. рис. 25.1, в). Включенное таким образом корректирующее
устройство будем называть прямым параллельным и его передаточную функцию будем
обозначать WK3.
Иногда прямое параллельное корректирующее устройство оказывается весьма
удобным, так как при меньшей сложности обеспечивает нужное преобразование сигнала
управления.
Пусть, например, W3 k3 ; Wk 3 kk 3 /(Ts 1) . Тогда передаточная функция
данного участка цепи
W3 W3 Wk 3 k3 (T3s 1) /(Ts 1)
где k3 k3 kk 3 , T3 k3T /( k3 kk 3 ) .
Следовательно, при малой разности (k3 kk 3 ) получается реальное форсирующее
звено с большой постоянной времени дифференцирования. Уменьшение передаточного
коэффициента этого участка прямой цепи должно быть скомпенсировано соответствующим увеличением передаточного коэффициента усилителя.
Синтезируют корректирующее устройство на основании некоторого комплекса
требований к свойствам системы. Сначала определяют требуемое значение передаточной
функции Wk1 последовательного корректирующего устройства. Затем выясняют, при каких
значениях передаточных функций Wk 2 параллельного корректирующего устройства и Wk 3
прямого параллельного корректирующего устройства будет получен тот же эффект, после
чего уже можно решать, какое корректирующее устройство целесообразнее создавать.
Составим формулы для такого расчета.
По каждой из структурных схем (см. рис. 25.1) составим передаточные функции
разомкнутой цепи и приравняем эти выражения друг другу. Получаем
WW k1 W /(1 W2Wk 2 ) (1 Wk 3W3 ).
(25.14)
где W W1W2W3 .
Из (25.14) определяют формулы перехода от одного вида корректирующего
устройства к другому:
Wk1 1 /(W W2Wk 2 ) 1 Wk 3 / W3 ;
Wk 2 (1 Wk1 ) /(W2Wk1 ) Wk 3 /W2 (W3 Wk 3 );
Wk 3 W3 (Wk1 1) W2W3Wk 2 /(1 W2Wk 2 ).
(25.15)
Если значение передаточной функции Wk 2 оказывается отрицательным, то
параллельное корректирующее устройство должно включаться в виде положительной
обратной связи. При отрицательном значении передаточной функции Wk 3 выходной сигнал
прямого параллельного корректирующего устройства должен вычитаться из выходного
сигнала участка W3 .
В настоящее время корректирующие устройства являются основным способом
повышения качества линейных непрерывных систем регулирования по отклонению.
Иногда в системе одновременно используют два корректирующих устройства:
последовательное и параллельное или параллельное и прямое параллельное. Таким
образом, функции, которые должны выполнять корректирующее устройство, распределяются между двумя корректирующими устройствами. Они могут быть выполнены из более
простых элементов.
Составим формулы для замены последовательного корректирующего устройства
двумя: последовательным и параллельным; такой вариант наиболее вероятен.
g
x
W3
W’k1
-
-
W2
W1
y
W’k2
Рис. 25.3
Итак,
пусть
определена
передаточная
функция
Wk1
последовательного
корректирующего устройства (рис. 25.1, а), при которой система будет иметь необходимые
динамические свойства. Однако из-за сложности Wk1 решено создать в системе два
корректирующих устройства: последовательное и параллельное (рис. 25.3). Определяем
передаточные функции разомкнутой цепи каждой из этих систем и приравниваем их друг
другу:
WW k1 WWk1 /(W W2Wk2 ).
(25.16)
Из этого равенства следует, что
Wk1 Wk1 (1 W2Wk2 ); Wk2 (Wk1 Wk1 ) /(W2Wk1 ).
(25.17)
Можно выбрать передаточную функцию Wk2 параллельного корректирующего
устройства и по первому из равенств (25.17) определить необходимое значение Wk1
передаточной функции последовательного корректирующего устройства или же выбрать
передаточную функцию Wk1 последовательного корректирующего устройства и тогда
второе из равенств (25.17) определит необходимое значение Wk2 передаточной функции
параллельного корректирующего устройства.
Аналогично можно составить формулы для замены последовательного
корректирующего устройства последовательным и прямым параллельным или же
параллельным и прямым параллельным.
Преобразовательные элементы
Корректирующие устройства систем регулирования осуществляют преобразование
сигнала управления. С этой целью их составляют из элементов, которые удобно называть
преобразовательными. Используются электрические (наиболее широко), механические,
гидравлические, пневматические и иные преобразовательные элементы. Рассмотрим
основные из них.
Пассивные четырехполюсники постоянного тока. Это электрические цепи из
резисторов, конденсаторов и индуктивностей. Общая схема пассивного четырехполюсника
показана на рис. 25.4. Входное и выходное напряжения постоянного тока обозначены
соответственно через è1 и è 2 ; z1 ( s ) R1 1 /(C1s ) L1s и z2 ( s ) R2 1 /(C2 s ) L2 s –
операторы сопротивлений четырехполюсника;
Ri , Ci , Li – соответственно активные
сопротивления, емкости и индуктивности; z H – полное сопротивление нагрузки.
Если напряжение è 2 приложено к нагрузке с бесконечно большим полным
сопротивлением z H , то передаточная функция пассивного четырехполюсника
WÏ ( s) z2 ( s) /z1 ( s) z2 ( s).
(25.18)
Варьируя вид операторов сопротивлений z1 ( s ) и z 2 ( s ) и значения Ri , Ci , Li можно
получить
большое
количество
четырехполюсников,
описываемых
различными
передаточными функциями WÏ . Стоимость пассивных четырехполюсников низкая, а
стабильность параметров достаточно высокая. Этими достоинствами объясняется широкое
использование их в системах автоматического регулирования, у которых сигналом
управления является напряжение постоянного тока.
Основной недостаток пассивных четырехполюсников заключается в том, что они
ослабляют сигнал; кроме того, при конечном значении полного сопротивления нагрузки
преобразование сигнала отклоняется от желаемого, соответствующего виду передаточной
функции WÏ , составленной по (5.18).
Наиболее характерные схемы пассивных четырехполюсников постоянного тока
показаны в табл. 5.1. Там же приведены их передаточные функции и логарифмические
частотные характеристики.
Принято разделять четырехполюсники на дифференцирующие, интегрирующие и
интегродифференцирующие. Дифференцирующие четырехполюсники (схемы 1 и 2 в табл.
25.1) в определенном диапазоне частот дифференцируют сигнал и создают положительный
сдвиг по фазе. Интегрирующие четырехполюсники (схемы 3, 4 в табл. 25.1) в некотором
диапазоне частот обеспечивают интегрирование сигнала, создают отрицательный сдвиг по
фазе.
Z1
u1
Z2
u2
Zн
Рис. 25.4.
Таблица- 25.1
Интегродифференцирующие четырехполюсники (схема 5 в табл. 25.1) в одном диапазоне
дифференцируют сигнал, а в другом диапазоне его интегрируют.
Иногда оказывается целесообразным соединить два пассивных четырехполюсника
последовательно (рис. 25.5, а). Передаточную функцию такого соединения определяют по
формуле
Wý WÏ 1WÏ
2
(25.19)
только при условии, что сумма полного сопротивления z12 z22 второго
четырехполюсника значительно, по крайней мере на порядок, больше полного
сопротивления z21 первого четырехполюсника.
Чаще пассивные четырехполюсники соединяют последовательно через
разделительный усилитель (рис. 25.5, б). Если входное сопротивление усилителя не влияет
на передаточную функцию WÏ 1 первого четырехполюсника, то передаточная функция
соединения
Wý WÏ 1k yWÏ 2 ,
(25.20)
где k y - передаточный коэффициент усилителя.
Преимущество второй схемы еще и в том, что разделительный усилитель
компенсирует понижение уровня сигнала, вызываемое пассивными четырехполюсниками.
Активные четырехполюсники постоянного тока. Общая схема такого
четырехполюсника представлена на рис. 25.6. В активных четырехполюсниках
используются операционные усилители с весьма большим передаточным коэффициентом
(k y 50 103 и более), поэтому передаточная функция четырехполюсника с достаточной
точностью равна
Wà z2 / z1.
(25.21)
Знак минус указывает на то, что знак напряжения è 2 противоположен знаку è1
(фаза сигнала изменяется на 180°).
Z2
Z1
u1
u2
Рис. 25.6
Активные четырехполюсники удается выполнять так, что они осуществляют почти
идеальное дифференцирование или интегрирование сигнала, тем более в ограниченной
полосе частот. Передаточный коэффициент может быть значительным. Легко осуществить
суммирование нескольких сигналов на входе. Все это весьма существенные достоинства
активных четырехполюсников. Однако они значительно сложнее и дороже пассивных
четырехполюсников.
Таблица 25.2
В табл. 25.2 приведены простейшие схемы активных четырехполюсников, их
передаточные функции и частотные характеристики. Схема 1 является
дифференцирующей, при R1 0 ее передаточная функция принимает вид Wa T1s .
Схема 2 – интегрирующая, при R2 0 ее передаточная функция Wa T1s . Схема 3 –
интегродифференцирующая.
Варьируя операторы сопротивлений z1 ( s ) и z 2 ( s ) и параметры их элементов,
можно получить активные четырехполюсники с более сложными передаточными
функциями.
Повышение точности в установившихся режимах
В системе регулирования по отклонению установившаяся ошибка имеет три
составляющие:
óñò g f × .Ý , (5.24)
где
g – ошибка воспроизведения задающего воздействия f – ошибка, вызываемая
действием возмущений;
× .Ý – ошибка чувствительного элемента, измеряющего
рассогласование.
Составляющая
× .Ý
зависит
от
физической
природы
и
конструкции
чувствительного элемента. Она может быть уменьшена лишь использованием
высокоточного элемента. При этом может потребоваться снижение уровня сравниваемых
сигналов и, следовательно, увеличение передаточных коэффициентов остальных элементов
регулятора.
Установившаяся ошибка может быть представлена в виде ряда (4.3). При этом
коэффициенты ошибок воспроизведения C0 , C1 ..., Cm вычисляют по передаточной
функции W f (s)
замкнутой системы для ошибки воспроизведения, а коэффициенты
ошибки от возмущения C0 f , C1 f ..., Cmf – по передаточной функции Wg (s ) замкнутой
системы для ошибки относительно возмущения по формулам (4.7).
Нужно, заметить, что в статической системе
C0 1 /(1 k ); C0 f k f /(1 k )
(25.25)
где k – передаточный коэффициент разомкнутой системы; k f – передаточный коэффициент
прямой цепи от возмущения f до выходной координаты y.
Следовательно, уменьшение, установившейся ошибки при постоянных значениях
задающего воздействия и; возмущения достигается увеличением передаточного
коэффициента разомкнутой системы. Однако с увеличением статической точности в,
большинстве случаев уменьшаются, запасы устойчивости и при. значительном увеличении
k система становится неустойчивой.
Противоречие между статической точностью и устойчивостью проиллюстрировано
на рис. 25.9, где сплошными линиями показаны логарифмические частотные
характеристики разомкнутой системы с передаточной функцией
W k /(T1s 1)(T2 s 1)(T3 s 1)
(25.26)
при k=20, T1=0,5 с, Т2 = 0,025 с, Т3 = 0,01 с. Если передаточный коэффициент увеличить до
k – 60, то ЛАЧХ принимает положение, показанное пунктиром. Частота среза увеличилась
и запас устойчивости по фазе уменьшился с
260 до 1 30 . Столь малый запас по
фазе совершенно недопустим.
При повышении статической точности путем увеличения передаточного
коэффициента k разомкнутой системы необходимы мероприятия для обеспечения
достаточного запаса устойчивости. Они будут рассмотрены в следующем параграфе. Возможно, вообще говоря, создание такой структуры системы, которая допускает
неограниченное увеличение передаточного коэффициента k разомкнутой цепи [21.
22
Рис. 25.9
Другой путь повышения статической точности – обеспечение астатизма. В
астатической системе младшие коэффициенты ошибки имеют следующие значения:
C0 0; C1 1 / k ; C0 f 0; C1 f k f / k ,
f
-
g
-
W3
K2/S
y
W1
Рис. 25.10
где k – передаточный коэффициент разомкнутой системы, называемый в данном случае
добротностью системы по скорости (или коэффициентом добротности по скорости).
Таким образом, в астатической системе отсутствует установившаяся ошибка от
постоянного задающего воздействия и постоянных возмущений.
Астатизм достигается введением интегрирующего звена в прямую цепь системы.
Для астатизма относительно возмущения интегрирующее звено должно быть введено до
точки, в которой приложено возмущение (рис. 25.10).
Влияние интегрирующего звена на динамические свойства системы приведено на
рис. 25.11, где сплошными линиями показаны логарифмические частотные характеристики
системы с передаточной функцией (25.11). При введении в разомкнутую цепь этой системы
интегрирующего звена характеристики принимают положение, показанное пунктиром.
Фазочастотная характеристика переместилась вниз на –90°, а амплитудно-частотная
характеристика повернулась вокруг точки а по направлению часовой стрелки . В результате
запас устойчивости по фазе уменьшился с 260 до недопустимо малого значения
1 60
. Система остается устойчивой, но переходный процесс будет сильно колебательным.
Кроме того, уменьшилась частота среза и переходные процессы будут более продолжительными.
Однако в других ситуациях введение интегрирующего звена может не только не
ухудшить, а даже улучшить динамические свойства системы. Пусть, например, постоянные
времени системы с передаточной функцией (25.26) имеют следующие значения: Т1= 0,05 с,
Т2 = 0,0025 с, иТ3 = 0,001 с. Логарифмические частотные характеристики разомкнутой
системы показаны на рис. 25.12 сплошными линиями.
Рис. 25.11
Рис. 25.12
При введении интегрирующего звена характеристики принимают положение,
показанное пунктирными линиями. В данном случае интегрирующее звено уменьшило
частоту среза, но запас устойчивости по фазе увеличился с
210 до 1 430 . Хотя
быстродействие системы уменьшилось, но уменьшилась и колебательность.
Таким образом, при повышении статической точности путем введения
интегрирующего звена могут оказаться необходимыми мероприятия по сохранению
запасов устойчивости САУ.
Значительно лучшие результаты получают при получении астатизма с помощью
изодромного
звена,
т.
е.
звена
с
передаточной
функцией
WÈ ( s) k È (TÈ s 1) / s 1 k È / s , где TÈ 1 / k È – постоянная времени изодрома.
Если постоянная времени TÈ достаточно велика, то запас устойчивости может быть
сохранен неизменным. Уменьшение передаточного коэффициента разомкнутой системы
должно быть скомпенсировано увеличением коэффициента усиления усилителя. Следует
учитывать, что при большом значении TÈ могут увеличиться старшие коэффициенты
ошибки.
Астатизм САУ относительно задающего воздействия можно обеспечить более
простыми способами: неединичной обратной связью и масштабированием [3].
Структурная схема системы с неединичной обратной связью показана на рис. 25.13,
а. В установившемся режиме регулируемая координата связана с постоянным задающим
воздействием соотношением
y k Ï g 0 /(1 k Ï k0 ),
(25.27)
где k Ï – передаточный коэффициент прямой цепи системы.
Если
выполнить основную обратную связь системы с коэффициентом
k0 1 1 / k Ï , то y g 0 у – g0 и система относительно задающего воздействия будет
астатической.
Структурная схема системы с масштабированием входной величины показана на
рис. 25.13, б. Ее особенность – наличие усилительного звена с передаточным коэффициентом m на входе. В установившемся режиме
y mg 0 k /(1 k ),
(25.28)
где k– передаточный коэффициент разомкнутой системы.
При m 1 1/ k получаем y g 0 и система является астатической относительно
задающего воздействия.
б)
a)
y
g
Wn
-
y
m
g
K0
Рис 25.13
W
-
Недостаток этих способов в том, что астатизм обеспечивается только при
сохранении указанных соотношений между передаточными коэффициентами. Неточное
определение передаточного коэффициента какого-либо элемента системы и его изменение
в процессе эксплуатации ведут к появлению статической ошибки. Астатизм, достигнутый
введением интегрирующего или изодромного звена, сохраняется и при изменении параметров системы. Однако нужно иметь в виду, что введение двух интегрирующих звеньев
в систему, состоящую из усилительных, апериодических и колебательных звеньев, сделает
ее структурно-неустойчивой. Возможно обеспечение астатизма и более высокого порядка.
При этом из-за введения большого числа интегрирующих или изодромных звеньев и
мероприятий, обеспечивающих требуемые динамические свойства, структура САУ
значительно усложняется.
Компенсация внешнего воздействия (обеспечение инвариантности). Рассмотренные
выше способы улучшения статических и динамических свойств системы связаны лишь с
изменениями параметров элементов САУ и структуры ее отдельных участков, но при этом
не затрагивают принципа действия системы.
Помимо принципа регулирования по отклонению существует принцип
регулирования по внешнему воздействию. Значительный эффект дает их одновременное
использование. В этом случае системы называются комбинированными. Кроме замкнутого
контура они имеют дополнительную цепь влияния внешнего воздействия – возмущения или
задающего.
Контрольные вопросы:
1. Какие способы и средства улучшения свойств линейных систем автоматического
регулирования вы знаете?
2. Наиболее употребительные методы синтеза линейных систем автоматического
регулирования?
3. Влияние интегрирующего звена на динамические свойства системы?
26-ЛЕКЦИЯ
Обеспечение устойчивости и повышение запаса устойчивости. Синтез
корректирующих устройств по логарифмическим амплитудно-частотным
характеристикам
План:
1. Логарифмические частотные характеристики разомкнутой системы с передаточной
функцией
2. Введение дополнительных звеньев
Обеспечение устойчивости и повышение запаса устойчивости
Способы придания системам автоматического регулирования устойчивости и
достаточного запаса устойчивости (способы стабилизации и демпфирования)
разнообразны. В предыдущей лекции рассматривалась возможность решения этой задачи
выбором основных элементов регулятора и изменением их динамических свойств с
помощью местных обратных связей. Выясним, как влияет на устойчивость изменение
наиболее характерного параметра – постоянной времени апериодического звена.
На рис. 26.1 сплошными линиями изображены логарифмические частотные
характеристики разомкнутой системы с передаточной функцией (5.26). При увеличении T1
с 0,5 до 1 с характеристики принимают положение, показанное пунктирными линиями.
Увеличение постоянной времени T1 приводит к увеличению запаса устойчивости по фазе с
260 до 1 60 0 . Заметим, что сопрягающая частота 1 1 / T1 расположена левее
частоты среза cp .
Если же сопрягающая частота апериодического звена расположена правее частоты
среза cp , то увеличение постоянной времени этого звена уменьшит запас устойчивости.
Очевидно, что изменение постоянной времени колебательного звена влияет на запас
устойчивости аналогичным образом. Влияние постоянной времени форсирующего звена
[звена с передаточной функцией Wô k (Ts 1) ] противоположно.
Итак, если сопрягающая частота апериодического или колебательного звена
расположена левее частоты среза логарифмической амплитудно-частотной характеристики
разомкнутой системы, а сопрягающая частота форсирующего звена расположена правее
частоты среза, то увеличение постоянной времени каждого из этих звеньев ведет к увеличению запаса устойчивости. Указанная зависимость справедлива лишь при условии, что
сопрягающая частота расположена на некотором удалении (около одной декады) от частоты среза.
Рис. 26.1
Рис. 26.2
Встречаются, однако, структуры, для которых указанное правило не выполняется.
Пусть, например, передаточная функция разомкнутой системы
W k (T0 s 1) /(T1s 1)(T2 s 1)(T3s 1),
где k 100; T0 0,1c; T1 1c; T2 0,5c; T3 0,01c.
Логарифмические частотные характеристики этой системы показаны на рис. 26.2
сплошными линиями. При изменении T1 с 1 до 10 с характеристики принимают положение,
показанное на рис. 5.17 пунктиром. Запас устойчивости по фазе с
610 уменьшился до
1 47 0 .
Другой и наиболее применяемый путь стабилизации и демпфирования системы –
введение в ее прямую цепь дополнительных звеньев. С этой целью используют сложные
динамические звенья.
В зависимости от структуры и параметров системы введение одного и того же звена
может дать различные результаты. Введение интегрирующего звена может вести и к
уменьшению, и к увеличению запаса устойчивости. Поэтому правильный выбор
дополнительного звена можно сделать только зная структуру и параметры системы.
Рассмотрим наиболее характерные случаи стабилизации и демпфирования систем
путем введения дополнительных звеньев. Предположим, что разомкнутая система
описывается передаточной функцией при k 100; T1 0,05c; T2 0,01c; T3 0,001c.
В разомкнутом состоянии система устойчива и ее логарифмические частотные
характеристики, изображенные на рис. 26.3 сплошными линиями, свидетельствуют о
неустойчивости замкнутой системы, так как фаза достигает –180° при частоте, меньшей
частоты среза.
Введем в прямую цепь системы дополнительное звено с передаточной функцией
WÄ TÄ s 1 , где TÄ =8 с. Тогда характеристики системы принимают положение,
показанное на рис. 26.3 пунктирными линиями, и на основании их можно видеть, что
замкнутая система становится устойчивой. Запас по фазе составляет
1 510 .
Увеличением постоянной времени T Ä дополнительного звена запас устойчивости по фазе
можно увеличить.
Устойчивость достигнута введением апериодического звена, постоянная времени
которого значительно больше постоянных времени имеющихся апериодических звеньев.
При этом высокочастотная часть логарифмической амплитудно-частотной характеристики
сместилась вниз. Так же изменилась и логарифмическая фазочастотная характеристика.
Такой прием обеспечения устойчивости или повышения запаса устойчивости называют
демпфированием с подавлением высоких частот (демпфированием с внесением
отрицательных фазовых сдвигов).
Апериодическое звено с большой постоянной времени представляет собой фильтр
низких частот и подавляет высокочастотные помехи. В этом достоинство данного вида
демпфирования. Значительное уменьшение частоты среза и, следовательно,
быстродействия системы является весьма существенным недостатком.
Рис. 26.3
Если ось абсцисс пересекается асимптотой ЛАЧХ, имеющей наклон –20дБ/дек, и
слева от частоты среза cp только одна сопрягающая частота, то система остается
устойчивой и запас устойчивости не изменяется при увеличении передаточного
коэффициента k разомкнутой системы. Нужно только одновременно с увеличением k
пропорционально увеличивать постоянную времени апериодического звена. Предположим
далее, что в рассматриваемую систему введено дополнительно идеальное форсирующее,
звено с передаточной функцией WÄ TÄ s 1 , где T Ä =0,01 с. На рис. 26.4 изображены
логарифмические частотные характеристики разомкнутой цепи исходной системы
(сплошные линии) и системы с дополнительным звеном (пунктирные линии). В замкнутом
состоянии система с дополнительным звеном будет устойчивой, запас по фазе составляет
1 430 .
Рис. 26.4
Теперь устойчивость достигнута введением не апериодического, а форсирующего
звена. В результате высокочастотная часть ЛАЧХ сместилась вверх. Такое же изменение и
у ЛФЧХ, поэтому данный прием называют демпфированием с поднятием высоких частот
(демпфированием с внесением положительного фазового сдвига).
Введением форсирующего звена могут быть обеспечены устойчивость и
необходимый запас устойчивости при любой передаточной функции исходной системы
(если она становится структурно устойчивой). Одновременно увеличивается и быстродействие. Однако существенно увеличивается и влияние высокочастотных помех.
Последнее обстоятельство является серьезным недостатком данного вида
демпфирования и ограничивает его применение.
Предположим еще, что в рассматриваемую систему введено дополнительно сложное
звено с передаточной функцией
WÄ (T2 Ä s 1)(T3 Ä s 1) /(T1 Ä s 1)(T4 Ä s 1),
где T1 Ä = 0,1 с; T2 Ä = T3 Ä = 0,01 с и T4 Ä =0,001 с.
Рис. 26.5
На рис. 26.5 показаны логарифмические частотные характеристики разомкнутой
цепи исходной системы (сплошные линии) и системы с дополнительным звеном
(пунктирные линии). В замкнутом состоянии система с дополнительным звеном устойчива,
запас устойчивости по фазе
1 49 0 .
Устойчивость достигнута смещением вниз среднечастотной части ЛАЧХ, и данный
прием называют демпфированием с подавлением средних частот. Этот вид демпфирования
промежуточный между двумя первыми, и применяют его наиболее часто.
Рассмотренные приемы стабилизации и демпфирования систем автоматического
регулирования являются основными, но далеко не исчерпывают всех возможностей.
Контрольные вопросы:
1. Сопрягающая частота апериодического звена
2. Введение в систему прямую цепь дополнительных звеньев
3. Что представляет собой апериодическое звено с большой постоянной времени?
27-ЛЕКЦИЯ
Синтез корректирующих устройств по логарифмическим амплитудно-частотным
характеристикам
Под синтезом будем понимать проектирование регулятора для системы
автоматического управления по заданным требованиям к точности и качеству переходных
процессов.
Исходными в задаче синтеза являются следующие данные.
Передаточная функция объекта управления W0(p) или его структурная схема,
которая может содержать возмущающее воздействие. В общем случае структурная схема
может быть представлена в виде двух звеньев, одно из которых включено до возмущающего
воздействия (W0l на рис. 1 а), а второе - после него (W02 на рис. 1 а).
Предельно допустимые значения оценок качества регулирования. Как правило,
задаются максимальные значения относительной статической или скоростной ошибки,
времени переходного процесса и перерегулирования.
Рис. 1 а. Структурная схема объекта управления
Рис. 1 б. Структурная схема простейшей
системы автоматического регулирования
Для того чтобы получить систему автоматического регулирования,
обеспечивающую равенство выходной переменной заданию на регулятор (с определенной
точностью), необходимо охватить объект управления отрицательной обратной связью (рис.
1.б). Далее может потребоваться решение следующих частных задач: обеспечение
устойчивости, повышение запасов устойчивости, повышение точности регулирования,
улучшение переходных процессов. Для этого в систему вводятся дополнительные звенья,
называемые корректирующими устройствами.
Таким образом, можно считать, что решение задачи синтеза заключается в выборе
корректирующих устройств.
Различают следующие четыре основных вида корректирующих устройств по схеме
их подключения:
Последовательные корректирующие устройства,
последовательно с объектом управления (рис. 2)
включаемые
в
схему
Логарифмические частотные характеристики САУ до (а) и после введения
производной от ошибки (б)
Существенным здесь является то, что при введении воздействия по производной
фазовый сдвиг получает положительное приращение. Вследствие этого повышаются
запасы устойчивости системы. Введение производной от ошибки может служить и
стабилизирующим средством: превращать неустойчивую замкнутую систему в устойчивую
Увеличение общего коэффициента усиления разомкнутой системы
Увеличение коэффициента усиления - метод повышения точности системы. При
увеличении коэффициента усиления части системы, включенной в схему до возмущающего
воздействия, уменьшаются все виды установившихся ошибок. С другой стороны,
увеличение кх ведет к уменьшению запасов устойчивости, а значит, и качества переходного
процесса. Поэтому часто приходится это делать одновременно с введением производной от
ошибки.
Увеличение кх осуществляется последовательным введением усилительного звена в
общую цепь
Введение интеграла от ошибки б) метод преобразования статической системы в
астатическую, а значит, и увеличения ее точности. Вследствие изменения фазы на -90°
уменьшаются запасы устойчивости системы и качество переходного процесса. Иногда это
может привести и к неустойчивости замкнутой системы.
Структурные схемы САУ с введением дополнительного коэффициента усиления
(а) и интеграла от ошибки (б)
Изодромное корректирующее устройство
ЛАЧХ и ЛФЧХ изодромного корректирующего устройства показаны на рис. 7, а. Из
них видно, что это устройство изменяет лишь низкочастотную часть ЛАЧХ разомкнутой
системы, влияющую только на точность системы, а отрицательный сдвиг фазы в части,
существенной для условия устойчивости, невелик.
Изодромное корректирующее устройство объединяет в себе введение интеграла и
производной от ошибки. Оно позволяет получить астатическую систему, сохраняя свойство
устойчивости и качество переходных процессов.
Процедура синтеза регулятора
В процедуре синтеза последовательного корректирующего устройства частотным
методом можно выделить пять этапов.
Этап 1 - определение коэффициента усиления корректирующего устройства
Коэффициент усиления корректирующего устройства определяется из условия
обеспечения требуемой статической или скоростной ошибки.
Этап 2 - построение ЛА ЧХ объекта управления с учетом коэффициента усиления
корректирующего устройства
Часто модель объекта управления представляет собой последовательную цепочку
типовых звеньев. В этом случае выполняется построение приближенной асимптотической
ЛАЧХ (в виде ломаной линии)
Этап 3 - построение желаемой ЛА ЧХ разомкнутой системы
Желаемая ЛАЧХ разомкнутой системы строится на основе требований к качеству
регулирования. При этом низкочастотный участок ЛАЧХ определяется требованиями к
точности, а среднечастотный, оказывающий наибольшее влияние на частотные
характеристики замкнутой системы, - требованиями к качеству переходных процессов.
Контрольные вопросы:
1. Сколько основных видов различают корректирующие устройства?
2. К чему предъявляются требования низкочастотного участка ЛАЧХ?
3. Какие знаете методы повышения точности системы?