Министерство науки и высшего образования Российской Федерации
КАЗАНСКИЙ НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ
ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ им. А.Н.ТУПОЛЕВА
В.И.ГАРКУШЕНКО
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Учебное пособие для самостоятельной работы
Казань 2021
2
УДК 681.3
В.И. Гаркушенко. Теория автоматического управления: Ч.1. Линейные системы. Учебное пособие. Казань: 2021. – 222 с.
Рассматриваются вопросы моделирования и исследования линейных систем автоматического управления. Излагаются основы методов построения математических моделей, преобразования уравнений динамики, исследования
устойчивости и динамических свойств, синтеза законов управления, наблюдающих устройств, а также способы решения практических задач с помощью
средств пакета MATLAB.
Рассматриваются вопросы, связанные с численным решением задач ТАУ
с помощью системы MATLAB.
Предназначено для бакалавров, обучающихся по направлению 27.03.04 –
«Управление в технических системах», и может быть использовано для инженерных специальностей технических вузов.
3
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ .................................................................................................................. 5
1.
ЛИНЕЙНЫЕ НЕПРЕРЫВНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ ...................... 6
1.1. Предмет и задачи теории автоматического управления ............................... 6
1.2. Исторический обзор .......................................................................................... 8
1.3. Основные принципы управления и моделирования систем ....................... 11
1.4. Классификация САУ .................................................................................... 24
1.5. Динамические модели САУ ........................................................................... 27
1.5.1. Линеаризация уравнений динамики ........................................................... 28
1.5.2. Преобразование Лапласа ............................................................................. 35
1.5.3. Передаточные функции ............................................................................... 46
1.5.4. Временные характеристики ........................................................................... 50
1.5.4.1. Структура движения системы ..................................................................... 51
1.5.4.2. Типовые входные сигналы .......................................................................... 54
1.5.4.3. Переходная характеристика ........................................................................ 56
1.5.4.4. Весовая характеристика............................................................................... 57
1.5.5. Частотные характеристики ............................................................................. 59
1.5.5.1. Свойства АФЧХ ........................................................................................... 62
1.5.5.2. Логарифмические частотные характеристики и их свойства .................. 64
1.5.6. Логарифмические частотные характеристики типовых звеньев ............... 68
1.5.6.1. Безынерционное (усилительное) звено ...................................................... 69
1.5.6.2. Дифференцирующее звено .......................................................................... 70
1.5.6.3. Интегрирующее звено.................................................................................. 70
1.5.6.4. Форсирующее звено первого порядка ....................................................... 71
1.5.6.5. Апериодическое звено ................................................................................. 73
1.5.6.6. Форсирующее звено второго порядка........................................................ 74
1.5.6.7. Колебательное звено .................................................................................... 76
1.5.6.8. Неминимально-фазовое форсирующее звено первого порядка .............. 78
1.5.6.9. Неминимально-фазовое апериодическое звено ........................................ 79
1.5.6.10. Звено чистого запаздывания ..................................................................... 80
1.5.6.11. Методика построения ЛАХ и ЛФХ .......................................................... 81
1.5.7. Структурные схемы САУ и их эквивалентное преобразование ................ 83
1.5.8. Многомерные системы ................................................................................... 92
1.5.9. Переход от операторного уравнения вход-выход к системе
дифференциальных уравнений ............................................................................. 96
1.5.10. Решение системы дифференциальных уравнений .................................. 99
1.6. Устойчивость САУ ........................................................................................ 103
1.6.1. Определение устойчивости по Ляпунову ................................................ 105
1.6.2. Устойчивость линейных систем ............................................................... 108
1.6.3. Теоремы Ляпунова об устойчивости по линейному приближению ..... 112
1.6.4. Алгебраические критерии устойчивости линейных систем .................. 114
1.6.4.1. Критерий Стодола ................................................................................... 114
1.6.4.2. Критерий Гурвица ................................................................................... 115
4
1.6.5. Частотные критерии устойчивости линейных систем ........................... 118
1.6.5.1. Метод D-разбиения построения области устойчивости...................... 118
1.6.5.2. Критерий устойчивости Михайлова...................................................... 120
1.6.5.3. Критерий устойчивости Найквиста ....................................................... 127
1.6.5.4. Логарифмический аналог критерия Найквиста ................................... 132
1.6.5.5. Запасы устойчивости .............................................................................. 133
1.6.5.6. Устойчивость систем с запаздыванием................................................. 135
1.6.5.7. Расширенный критерий Найквиста ....................................................... 137
1.7. Качество процессов автоматического регулирования .............................. 144
1.7.1. Прямые показатели качества ..................................................................... 145
1.7.2. Косвенные показатели качества ............................................................... 148
1.7.2.1. Алгебраические показатели качества.................................................... 148
1.7.2.2. Частотные показатели качества ............................................................. 151
1.7.2.3. Интегральные показатели качества ....................................................... 157
1.8. Синтез САУ .................................................................................................... 161
1.8.1. Синтез типовых регуляторов .................................................................... 162
1.8.2. Синтез последовательного корректирующего устройства .................... 170
1.8.2.1 Пример синтеза последовательного корректирующего устройства ... 178
1.8.3. Синтез параллельного корректирующего устройства ............................ 185
1.8.4. Синтез корректирующих устройств по команде и возмущению .......... 187
1.8.5. Синтез управления в пространстве состояний ........................................ 190
1.8. 5.1.Синтез управления при полном измерении .......................................... 190
1.8. 5.2.Синтез управления при неполном измерении ...................................... 204
1.8.6. Синтез управления при наличии возмущений ........................................ 209
1.8.6.1. Случай регулярных внешних воздействий ........................................... 209
1.8.6.2. Случай нерегулярных внешних воздействий ....................................... 213
5
ВВЕДЕНИЕ
В учебном пособии рассматриваются вопросы моделирования и исследования линейных, нелинейных и дискретных систем автоматического управления. Излагаются основы методов построения математических моделей, преобразования уравнений динамики, исследования устойчивости и динамических
свойств, синтеза законов управления, а также способы решения практических
задач с помощью средств пакета MATLAB. Представленные фрагменты программ могут быть использованы для решения дополнительных задач при самостоятельной работе для закрепления знаний и получения навыков исследования
САР с помощью ПЭВМ.
Содержание учебного пособия включает все необходимые сведения и доказательства утверждений, а также вопросы для самопроверки.
Ссылка на формулу, рисунок или таблицу является двузначной, где первая цифра означает номер раздела, а вторая цифра номер формулы и т.д.
Для освоения теоретического курса необходимо заучивать термины,
определения, утверждения, выделенные курсивом или заключенные в рамки.
Приведенные фрагменты программ необходимо выполнить на ПЭВМ и
сделать выводы.
В результате освоения дисциплины формируются компетенции:
ОПК-2 – Способен формулировать задачи профессиональной деятельности на
основе знаний, профильных разделов математических и естественнонаучных
дисциплин (модулей);
ОПК-4 – Способен осуществлять оценку эффективности систем управления,
разработанных на основе математических методов;
6
1. ЛИНЕЙНЫЕ НЕПРЕРЫВНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
1.1. Предмет и задачи теории автоматического управления
Практическая деятельность человека связана с совершением работы, состоящей из рабочих операций. Процесс выполнения работы связан с операциями управления, которые определяют начало, темп и конец выполнения рабочих
операций. Совокупность управляющих операций образует процесс управления.
Облегчение человеку выполнения рабочих операций называется механизацией, а операций управления – автоматизацией.
Операции управления частично или полностью могут выполняться техническими устройствами, которые называются автоматическими управляющими устройствами (УУ) или регуляторами, в которых реализованы законы
управления.
Совокупность технических устройств (машин, орудий труда, средств механизации), совершающих заданную работу, называется объектом управления
(ОУ), например, летательный аппарат (ЛА). Устройство, которое воздействует
при управлении на ОУ, называется управляющим органом (УО), которое конструктивно обычно входит в ОУ, например, рулевые органы ЛА.
Система, в которой все рабочие и управляющие операции выполняются
автоматическими устройствами без участия человека, называется системой
автоматического регулирования (САР). Если отдельные функции регулятора
выполняет человек, то такие системы называются автоматизированными системами управления (АСУ) или системами управления с оператором в контуре
управления. В дальнейшем будут рассмотрены САР.
На первых этапах развития техники использовались САР, в которых требовалось поддерживать регулируемую величину ОУ на заданном уровне
(например, уровень воды в паровом котле, температуру нагрева, обороты двигателя, напряжение на зажимах генератора). В современных системах автоматического управления (САУ) целью управления ОУ является не только регу-
7
лирование, но и обеспечение различных режимов с учетом ограничений
(например, движение мобильного робота при наличии препятствий, переориентация космического аппарата за наименьшее время).
ТАР – наиболее развитая и основная часть современной теории автоматического управления (ТАУ), в которой наряду с указанными задачами управления рассматриваются задачи адаптации, связанные с изменением условий
функционирования системы и ее свойств, а также задачи оптимального управления.
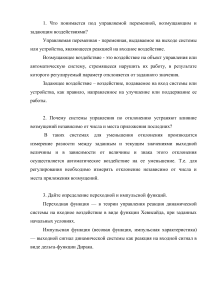
На рис. 1.1 приведена функциональная схема системы S, на вход которой
подается управляющий сигнал u и возмущение f, выходом системы является
сигнал y.
Рис. 1.1. Функциональная схема системы S
Основными задачами в ТАУ являются следующие задачи.
1. Задачей анализа является определение реакции выхода y при известной
математической модели S и известных сигналов u и f.
2. Задачей идентификации является определение математической модели
системы S по известному входу u и возмущению f и выходу y.
3. Задачей синтеза является определение управляющего сигнала u, обеспечивающего заданное изменение выхода y при известной модели системы S и
неизвестном возмущении f.
Отметим, что в инженерной практике при проектировании САУ на решение второй задачи уходит две трети времени. При этом следует иметь в виду,
что никакая математическая модель физической системы не является точной.
Она должна адекватно отражать поведение физической системы для заданного
режима работы и в то же время быть не слишком сложной для расчета управления. Иначе говоря, если с помощью принятой математической модели удается
8
построить регулятор, обеспечивающий требуемый режим работы системы, то
данная математическая модель системы является адекватной для выбранного
способа расчета и построения регулятора.
Цель изучения ТАУ состоит в овладении общими принципами и основными методами построения и исследования САУ и их использование при проектировании реальных систем.
1.2. Исторический обзор
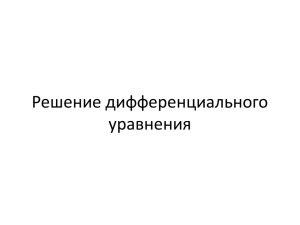
Как и любая другая наука ТАУ имеет свою историю становления и развития. Самое раннее из известных автоматических устройств относится ко II веку
до нашей эры. Это так называемые водяные часы, изобретенные Ктесибиосом,
в которых время измерялось с помощью капель воды, падающих с постоянной
скоростью через трубку из резервуара (рис. 1.2).
Рис. 1.2. Принципиальная схема водяных часов Ктесибиоса
Чтобы обеспечить постоянную скорость истечения воды qвых , необходимо было поддерживать постоянный уровень воды hв в резервуаре. Для этого
использовался плавающий клапан (поплавок), который перекрывал зазор для
поступления воды в резервуар, изменяя скорость qвх поступления воды. При
9
этом скорость поступления воды qвх зависит от разности hп hп* hп положения поплавка при полностью перекрытом зазоре hп* и текущем положении поплавка hп .
Тем самым, в данном устройстве регулируемой величиной является уровень воды в резервуаре hв , который через плавающий клапан изменяет количество поступления воды в резервуар. Иначе говоря, с помощью плавающего клапана в устройстве реализована обратная связь (ОС): поступление воды в резервуар зависит от уровня воды в резервуаре.
Капли воды падают в накопительную емкость, снабженную проградуированной шкалой. Уровень воды указывает промежуток времени с того момента,
когда нижний сосуд был пуст. Фактически накопление воды в нижнем сосуде
является операцией интегрирования (суммирования), которая в настоящее время используется в компьютерных вычислениях.
В масляном фонаре, изобретенном Филоном приблизительно в 250 году
нашей эры, поплавковый клапан позволял поддерживать постоянный уровень
масла, игравшего роль горючего.
Первой системой с обратной связью, изобретенной в Европе, был регулятор температуры Корнелиуса Дреббеля (1572-1633) из Голландии. Дени Папе
(1647-1712) в 1681 г. изобрел первый регулятор давления для паровых котлов,
работавший по принципу предохранительного клапана.
В России первой в истории системой с обратной связью был поплавковый
регулятор уровня воды в паровом котле, изобретенный Иваном Ивановичем
Ползуновым в 1765 г. С помощью поплавка измерялся уровень воды, а рычажный механизм воздействовал на клапан, регулировавший подачу воды в котел.
Первым автоматическим регулятором промышленного назначения считается центробежный регулятор Джеймса Уатта, разработанный в 1769 г. для
управления скоростью вращения вала паровой машины.
Паровая машина не случайно стала первым объектом для промышленных
регуляторов, так как она не обладала способностью устойчиво работать сама по
10
себе. Часто возникала ситуация, когда подключенный к машине регулятор действовал не так, как ожидал конструктор: он начинал раскачивать машину. Делались попытки «успокоения» колебаний самого регулятора, считая, что этого
достаточно и для успокоения колебаний машины. При таком подходе теоретические исследования не могли стать фундаментом новой науки и были лишь
дополнительными проработками в рамках прикладной механики, придатком к
ее разделу о паровых машинах.
Коренное изменение в подходе к проблеме и в методологию исследования внесли три фундаментальные теоретические работы, содержавшие в себе,
по существу, изложение основ ТАР: работа Джеймса Клерка Максвелла (18311879) «О регуляторах» (1866) и работы Ивана Алексеевича Вышнеградского
(1831-1895) «Об общей теории регуляторов» (1876) и «О регуляторах прямого
действия» (1877). Данные работы заложили основы системного подхода к проблеме, рассмотрев регулятор и машину как единую динамическую систему.
Уже в те годы теория регулирования стала стимулировать разработки математических методов для исследования систем управления. По инициативе
Максвелла был разработан алгоритм для оценки расположения корней характеристического уравнения и устойчивости Эдвардом Джоном Раусом (1831-1907).
По просьбе словацкого инженера и ученого Ауреля Стодолы (1859-1942) в 1895
году немецкий математик Адольф Гурвиц (1859-1919) вывел детерминантный
критерий устойчивости.
В 1892 г. вышла классическая работа русского ученого, механика Александра Михайловича Ляпунова (1857-1918) «Общая задача об устойчивости
движения», которая заложила основы методов анализа устойчивости и синтеза
нелинейных систем, которые развиваются в настоящее время.
В первые десятилетия XX века ТАР, вышедшая из рамок прикладной механики, формируется как общетехническая дисциплина. В этот период появляется целый ряд работ, рассматривающих приложение теории и распространяющих ее выводы на самые разнообразные технические процессы. С кратким
очерком развития ТАУ этого и последующего периода можно ознакомиться в
11
книгах советского ученого, педагога Авенира Аркадьевича Воронова (19101992) [5].
1.3. Основные принципы управления и моделирования систем
Основами становления ТАР являются: 1) изобретение обратной связи; 2)
системный подход; 3) привлечение математических методов.
На языке системного подхода любую физическую систему можно
абстрактно представить в виде модели с причинно-следственными связями.
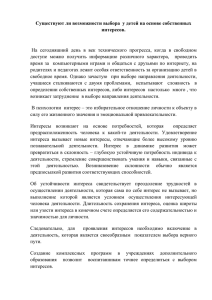
Обобщенная функциональная схема САУ представлена на рис. 1.3.
Рис. 1.3. Обобщенная функциональная схема САУ
Здесь объект управления характеризуется совокупностью переменных
y1,..., yl , которые называются выходами объекта. В дальнейшем будем говорить: y t y1 (t ),..., yl (t )
T
объект
управления
имеет
– вектор выхода системы. Кроме выходов любой
совокупность
входов
u1,..., um ,
при
этом
u t u1 t ,..., um t – вектор входа системы. Такая система называется мноT
гомерной, частным случаем которой является одномерная система, со скалярным входом и выходом.
Предполагается, что передача сигналов осуществляется по направлению
стрелки, но не обратно, что отражает причинно-следственную связь протекающих процессов.
Под требуемым режимом работы системы понимается желаемый закон
изменения выходных переменных. Например, требуется выполнение условия
12
yi t gi t , i 1, l с заданной точностью за конечное время при наличии со-
вокупности
внешних
воздействий
f1(t ),..., f p (t )
и
помех
измерений
1(t ),..., l (t ) . Обеспечение указанных условий возлагается на регулятор.
Если управляющие сигналы формируются независимо от текущего состояния системы, то говорят, что система является разомкнутой, т.е. на рис. 1.3
обратные связи в этом случае отсутствуют. При этом управляющие воздействия
рассчитываются заранее на основании априорных данных о регуляторе, ОУ и
внешних воздействий.
Если при выработке управляющих воздействий используется информация
о состоянии объекте, то система называется замкнутой.
Поскольку в процессе управления возникают ошибки или рассогласования i t gi t yi t , i 1, l , то управляющие воздействия вырабатываются в
зависимости от этих ошибок. Такой принцип построения САУ называется
принципом обратной связи или регулированием по отклонению, в соответствии
с которым регулятор вырабатывает управляющее воздействие на устранение
возникших ошибок.
Возможен и другой принцип построения САУ: предположим, что известны возмущающие воздействия, тогда можно выработать управление, компенсирующее возмущение. Такой принцип называется принципом регулирования по
возмущению. Но возмущения, как правило, неизвестны, поэтому для реализации этого принципа используются специальные устройства оценки неизвестных возмущений. Обычно регулирование по возмущению используется совместно с регулированием по отклонению.
Любая система управления состоит из отдельных функциональных элементов (ФЭ), соединенных между собой.
В качестве примера рассмотрим функциональную схему водяных часов
Ктесибиоса (рис. 1.2), представленную на рис. 1.4, где ФЭ выделены в отдельные блоки, точки обозначают ветвление сигнала, перечеркнутый кружок со
стрелками означает суммирование сигнала, если сектор закрашен, то это озна-
13
чает вычитание сигнала.
Рис. 1.4. Функциональная схема водяных часов Ктесибиоса
Здесь вход системы hп* задан конструктивно, регулируемая величина или
выход hв изменятся во времени t , если разность q qвх qвых отлична от нуля. Если резервуар недостаточно заполнен водой, то втекает воды больше, чем
вытекает, т.е. причиной динамики в данной системе является емкость резервуара. С течением времени в установившемся режиме (в равновесном состоянии)
должен установиться баланс, приходящей и уходящей из резервуара воды, т.е.
qуст 0 . При этом ошибка hп
*
уст hп
hп уст 0 и величина hв уст будет
иметь заданное значение, зависящее от значения hп* . Таким образом, данная система работает по отклонению.
Если увеличить скорость вытекающей воды qвых , увеличив диаметр
трубки, то увеличится значение установившейся ошибки hп уст .
Если установившаяся ошибка по отношению к выбранному входному
воздействию не равна нулю, то такая система называется статической, а
если равна нулю – астатической по отношению к выбранному воздействию.
Позднее будет показано, что астатизм системы зависит также от вида
входного воздействия и количества емкостных элементов (интегрирующих
элементов) в контуре главной обратной связи.
14
Таким образом, система на рис. 1.4 является статической. Однако если
исключить вытекание воды из резервуара, полагая qвых 0 , то получим
hп
уст 0 ,
и система станет астатической. Ее астатизм определяется наличием
только накапливающей воду емкости резервуара, т.е. процессом интегрирования поступающей воды.
Если в резервуаре имеется утечка воды q у , то на рис. 1.4 следует положить q qвх qвых qу , и рассматривать q у в качестве возмущения, которое
увеличивает ошибку hпуст .
В функциональной схеме рис. 1.4 присутствуют все основные элементы
замкнутой САУ: ОУ – резервуар с втекающей и вытекающей водой; главная
ОС – поплавок, являющийся одновременно чувствительным элементом (измерительным устройством), регулирующим органом и регулятором; устройство
сравнения (УС) – формирователь ошибки hп hп* hп . Системы, в которых
чувствительный элемент непосредственно воздействует на регулирующий орган, называются системами прямого регулирования. Системы, в которых между
чувствительным элементом и исполнительным органом имеются усилительнопреобразовательное устройство, называются системами непрямого регулирования.
Следует отметить, что у резервуара трубка для отвода воды выполняет
роль местной обратной связи. Тогда всю систему в целом можно назвать двухконтурной (с двумя вложенными контурами обратной связи). При этом главная
ОС ограничивает поступление воды в резервуар, а местная ОС отводит воду из
резервуара.
От функциональной схемы рис. 1.4 можно перейти к структурной схеме,
представляющей собой структурное математическое описание системы или ее
модель.
Если функциональные элементы системы представить линейными зависимостями
с
соответствующими
коэффициентами
передачи
(например,
15
qвх k зп hп ), а также ввести символ дифференцирования s d / dt и символ
интегрирования, как обратную операцию дифференцирования, обозначенный
через 1/ s , то уравнение резервуара можно записать в виде:
t
hв (t ) hв (0) kрез q( )d hв (0)
kрез
s
0
q .
Тогда структурная схема система будет иметь вид рис. 1.5.
Рис. 1.5. Структурная схема системы рис. 1.4
Емкостные свойства проявляются в различных физических процессах.
1. В механике прямолинейное движение материальной точки с постоянной массой m под действием силы F по оси x согласно второму закону Ньютона записывается уравнением
mv F , x v ,
(1.1)
из которого с учетом начальных условий x(0), v(0) следует, что
t
t
1
v(t ) v(0) F ( )d , x(t ) x(0) v( )d ,
m0
0
(1.2)
и чем больше масса тела m , тем медленнее изменяется скорость v (t ) . Следовательно, масса тела m определяет емкостные свойства механического движения.
Уравнения (1.1) с учетом выражений (1.2) можно представить в виде структурной схемы, представленной на рис. 1.6, где k1 1/ m , начальные условия v (0) ,
x (0) – дополнительные входы.
16
Рис. 1.6
Рис. 1.7
Из структурной схемы следует, что причиной движения является сила, в
результате действия которой возникает ускорение v F / m , потом скорость v ,
а затем перемещение x , но не наоборот. В связи с этим не существуют физически реализуемые устройства, преобразующие перемещение в скорость, что в
общем случае означает невозможность точного дифференцирования входных
сигналов.
В качестве примера рассмотрим операцию дифференцирования y su ,
которую можно рассматривать как прохождение входного сигнала u через систему, представляющую собой оператор дифференцирования s. Пусть сигнал
u sin t , тогда по правилу дифференцирования получим y cos t . Однако с фи-
зической точки зрения это невозможно, поскольку в момент времени t 0 сигнал на входе u (0) 0 , а на выходе y (0) 1.
Если в уравнении (1.1) сила F F * k2v k3 x , то получим уравнение
mx k2 x k3 x F * ,
которому соответствует двухконтурная структурная схема рис. 1.7, где F * является входом, x – выходом системы.
Аналогичные результаты можно получить для вращения твердого тела
вокруг неподвижной оси с угловой скоростью и моментом инерции J относительно оси вращения под действием момента M с помощью уравнений
J M , .
2. В электротехнике емкостные свойства электрических процессов определяются двухполюсниками: индуктивностью L и емкостью C , – с помощью
уравнений связи напряжения u на зажимах двухполюсника и протекающего по
17
нему тока i :
t
t
1
1
i i(0) u ( )d , u u (0) i ( )d .
L0
C0
Например, для электрического контура рис. 1.8, в котором индуктивность
L , омическое сопротивление R , конденсатор C и внешний источник энергии
ЭДС e соединены последовательно, с учетом второго закона Кирхгофа справедливы уравнения в символьном виде:
uab e ubc ucd , i i (0)
1
1
uab , ucd ucd (0) i , ubc Ri ,
Ls
Cs
по которым построена структурная схема на рис. 1.9 для входа e и выхода ucd
с учетом обозначений k1 1/ L , k2 R , k3 1/ C .
Рис. 1.8
Рис. 1.9
Сравнивая рис. 1.7 и рис. 1.9 видим, что при k3 1 структурные схемы
совпадают с точностью до обозначений, поскольку совпадают по виду их исходные дифференциальные уравнения. Это наблюдение лежит в основе теории
моделирования физических процессов любой природы с помощью электрических схем на операционных усилителях.
Другой способ моделирования динамических систем связан с использованием, например, вычислительного пакета MatLab и системы Simulink [14], в
которой можно моделировать различные структурные схемы.
В качестве примера проведем моделирование в Simulink структурной
схемы рис. 1.9, которой соответствует модель на рис. 1.10. При заданных значений параметров, введенных в командной строке:
>> k1=1e3; k2=1e6; k3=1e6;
На рис. 1.11 приведена реакция выхода y ucd при подаче на вход
18
напряжения e 1 В при начальных условиях i (0) 0 , ucd (0) 0 .
Рис. 1.10. Модель структурной схемы рис. 1.9 в Simulink
Рис. 1.11. Реакция выхода y ucd при подаче на вход напряжения e 1 В
3. Примером электромеханической системы управления может служить
система регулирования скорости двигателя постоянного тока, принципиальная
схема которой приведена на рис. 1.12. Здесь с помощью управляющего воздействия g задаются требуемые обороты двигателя, которые контролируются с
помощью тахогенератора вырабатывающего напряжение, пропорциональное
оборотам двигателя uтг kтг , и наблюдаются на измерительном приборе.
Управляющее воздействие g перемещает движок потенциометра, на вход которого подается напряжение питания uп1 , а с выхода снимается сигнал
ug uп1R1 / R , где R R1 R2 . Полагая R1 k1g можно считать, что ug kп g ,
где kп uп1k1 / R . Сигнал u g подается на вход усилителя мощности с источником питания uп2 и коэффициентом усиления k y , с выхода которого напряжение
uy k yu g подается в якорную цепь двигателя постоянного тока (ДПТ) с омиче-
ским сопротивлением Rя и индуктивностью Lя .
19
Рис. 1.12. Принципиальная схема разомкнутой системы регулирования ДПТ
На независимую обмотку возбуждения двигателя (статорную обмотку)
подается постоянное напряжение uв . Если не учитывать насыщение, то магнитный поток в воздушном зазоре между статором и ротором пропорционален
току возбуждения iв , т.е. kвiв . Учитывая, что электромагнитный момент
двигателя M дв cдвiя , где iя – ток в цепи якоря, cдв – конструктивный коэффициент двигателя, то получим
M дв cдв kвiвiя cмiя ,
(1.3)
где cм cдвkвiв – постоянный коэффициент вращающего момента ротора двигателя, значение которого зависит от тока возбуждения iв . Ток в цепи якоря iя
связан с напряжением u y уравнением:
uу Rя iя Lя
diя
cе ,
dt
где – угловая скорость ротора двигателя, cе – коэффициент противо-ЭДС
якоря, который в системе единиц СИ равен по значению c м . Тем самым для тока якоря iя с учетом обозначения k L 1 / Lя справедливо уравнение в символьном виде:
iя iя (0)
kL
(uу Rя iя cе) .
s
(1.4)
Угловая скорость ротора двигателя зависит от электромагнитного момента двигателя M дв посредством уравнения динамики
20
J
d
M дв M c ,
dt
где J – приведенный момент инерции ротора двигателя с учетом инерции
нагрузки, M c – момент сопротивления на валу двигателя. Тем самым для угловой скорости с учетом обозначения k J 1/ J справедливо уравнение в символьном виде:
(0)
kJ
( M дв M c ) .
s
(1.5)
Уравнениям (1.3) - (1.5) соответствует структурная схема системы, представленная на рис. 1.13, из которой следует, что ДПТ является двухконтурной
системой, при этом система по каналу вход-выход разомкнутая.
Рис. 1.13. Структурная схема разомкнутой системы регулирования ДПТ
Недостатком разомкнутой системы является существенная зависимость
угловой скорости от момента сопротивления M c . Здесь при росте M c снижается : M c , поэтому для поддержания заданной скорости * необходимо участие человека, изменяющего значение g .
Для повышения точности подержания заданной скорости * при некотором значении M c* без участия человека используется обратная связь по скорости, как показано на рис. 1.14. Структурная схема системы представлена на
рис.1.15.
21
Рис. 1.14. Принципиальная схема замкнутой системы регулирования ДПТ
Рис. 1.15. Структурная схема замкнутой системы регулирования ДПТ
В этом случае на вход усилителя подается разность u ug uтг . Поэтому
здесь происходят следующие изменения: M c uтг u uу . Спустя некоторое время система перейдет в установившийся режим со значениями
uy уст , iя уст , уст * при M c M c* . Здесь значение ошибки * уст тем
меньше, чем больше значение коэффициента усиления k y , что следует из выражения uy уст kyu уст .
Для функционирования системы необходимо, чтобы u 0 , т.е. система
работает по отклонению и является статической по отношению к команде g и
возмущению M c .
Проведем моделирование в Simulink структурной схемы рис. 1.15, которой соответствует модель на рис. 1.16. При заданных значений параметров,
введенных в командной строке:
22
>> kp=0.5; ky=100; kL=1e3; ce=1; cm=ce; R=10; kJ=1; ktg=0.7;
На рис. 1.17 приведена реакция выхода y при g 1, M c 1 и начальных условиях i (0) 0 , (0) 0 .
Рис. 1.16. Модель структурной схемы рис. 1.15 в Simulink
Рис. 1.17. Реакция выхода y при g 1, M c 1
4. В теплотехнике во многих случаях поток тепла Q (Вт) через объект с
тепловым сопротивлением R (К/Вт) пропорционален разности температур на
его границах T1 и T2 (К):
Q T1 T2 / R ,
где R l /(kP) , l длина пути (м) теплового потока, проходящего через поверхность площадью P ( м 2 ), k – теплопроводность материала (Вт/(Км)).
Емкостные свойства тепловых процессов определяются аккумулирующей
способностью тела накапливать тепловую энергию, температура которого
23
определяется по формуле:
t
1
T T (0) Q( )d ,
C0
(1.6)
где Q – алгебраическая сумма входящих и исходящих тепловых потоков, C –
теплоемкость тела (Дж/К), зависящая от массы тела и свойства материала.
Например, тепловой баланс однородной жидкости с температурой T и
теплоемкостью C в баке (рис. 1.18) при температуре T0 окружающей среды,
при тепловых потоках Q1 (T T0 ) / R1 (через верхнюю и нижнюю стенки с
суммарным тепловым сопротивлением R1 ) и Q2 (T T0 ) / R2 (через боковые
стенки с суммарным тепловым сопротивлением R2 ), Qн (от нагревателя) записывается уравнением
1
1
Q Qн Q1 Q2 Qн
(T T0 ) .
R
R
1
2
(1.7)
Уравнениям (1.6), (1.7) соответствует одноконтурная структурная схема
системы на рис. 1.19 с входом Qн , выходом T и возмущением T0 , где k1 1/ C ,
k2 1/ R1 1/ R2 .
Рис. 1.18. Нагрев жидкости в баке
Рис. 1.19. Структурная схема
По структурной схеме рис. 1.19 можно аналогично предыдущему провести моделирование нагрева жидкости в баке с помощью Simulink.
Таким образом, при наличии емкостных свойств у элементов системы
различной физической природы и конечной скорости протекания процессов система является динамической.
24
Вопросы для самопроверки
1. Какую функцию выполняет регулятор в САУ?
2. Какие используются принципы управления?
3. В чем заключается принцип обратной связи?
4. Какая обратная связь считается главной?
5. Чем отличается статическая система от астатической системы?
6. От чего зависит статическая ошибка в замкнутой системе?
7. Чем отличается система прямого регулирования от непрямого регулирования?
8. Что является причиной динамических свойств системы?
9. Какая система является физически нереализуемой?
10. Каким образом можно использовать электрические схемы для моделирования различных процессов?
1.4. Классификация САУ
В рассмотренных выше простейших системах функциональные элементы
приняты линейными. Такие системы называются линейными. Если ФЭ представляются в виде нелинейных функций от одного или нескольких входных
сигналов, то такие системы называются нелинейными. Примером нелинейной
системы
может
быть
система,
представленная
уравнением
(1.1),
где
F F * f ( x, v) , f ( x, v) – нелинейная функция.
Если ФЭ не зависят от времени t , то система называется стационарной, в
противном случае – нестационарной. Учитывая, что время t может быть представлено решением уравнения dt / d mt , mt const , то нестационарную систему можно считать разновидностью нелинейной системы во времени . С
физической точки зрения все ФЭ являются стационарными и введение нестационарных ФЭ вызвано удобством математического описания или следствием математических преобразований. Например, если на катушку наматывается
видeопленка, то в некоторых случаях удобнее полагать момент инерции катушки зависящим от времени t , чем рассматривать сам процесс перемотки пленки.
25
Если на выходе ФЭ сигнал изменяется дискретно по времени и/или уровню (например, при использовании в контуре управления ЦВМ), то система с
такими ФЭ называется дискретной, в противном случае непрерывной.
Если возмущения, действующие на систему, являются случайными функциями времени, то система называется стохастической, в противном случае
детерминированной.
Если некоторые ФЭ системы описываются дифференциальными уравнениями в частных производных (упругая конструкция ЛА, линии электропередач, нагреваемые массы, длинные трубопроводы и др.), то система называется
распределенной, поскольку в модели ФЭ учитывается его пространственная
протяженность. Если ФЭ, проводящий сигнал, можно моделировать материальной точкой (как это было принято выше), в которой сосредотачиваются все его
параметры, то система с такими ФЭ называется сосредоточенной.
В зависимости от использования текущей информации САУ делятся на
обычные (неадаптивные) и адаптивные. В отличие от обычных САУ в адаптивных текущая информация используется не только для выработки управляющего сигнала, но и для изменения алгоритма управления и/или задающего
воздействия.
Подытоживая выше сказанное можно провести классификацию САУ по
виду ее математической модели (рис. 1.20) и принципу действия (рис. 1.21).
Наиболее простые системы для расчета и реализации, которые разрабатывались
на первом этапе развития ТАУ, соответствуют левым блокам на рис. 1.20,
рис.1.21.
Из предыдущего следует, что одномерную САУ можно представить в виде одной из обобщенных функциональных схем, представленной на рис. 1.22,
где задающее устройство (ЗУ) формирует входной сигнал g , поступающий на
устройство сравнения (УС), на выходе которого формируется ошибка или рассогласование g yос .
26
Рис. 1.20
Рис. 1.21
Известная ошибка и другие сигналы (команда g , возмущение f , отмеченные пунктирной линиями, если их удается измерить) подаются в управляющее устройство (УУ), на выходе которого формируется управляющий сигнал u ,
поступающий в усилитель мощности (УМ) и затем на управляющий орган
(УО), передающий воздействие на объект управления (ОУ). При этом поведение управляемой величины определяется видом входного воздействия и свойствами системы.
Рис. 1.22. Обобщенная функциональная схема САУ
В зависимости от характера изменения задающего воздействия g САУ
могут быть подразделены на следующие три класса:
1) системы стабилизации;
27
2) системы программного управления;
3) следящие системы.
В системах стабилизации управляющее воздействие представляет собой
заданную постоянную величину: g const (например, система регулирования
скорости ДПТ, поддержания заданной температуры жидкости в баке и т.п.).
В системах программного управления задающее воздействие является известной функцией времени g (t ) gпр (t ) (например, для осуществления заданного режим нагрева, режим полета ракеты и т.п.) или пространственной координатой (например, в системах управления металлообрабатывающих станков).
В следящих системах задающее воздействие заранее неизвестно, при этом
предполагается, что измерению доступно рассогласование (например, в системе управления радиолокатором по измерению отклонения электронной оси
прибора от направления на объект слежения).
Вопросы для самопроверки
1. В чем отличие непрерывных систем от дискретных систем?
2. В чем отличие линейных систем от нелинейных систем?
3. В чем отличие сосредоточенных систем от распределенных систем?
4. В чем отличие детерминированных систем от стохастических?
5. Какую функцию в системе выполняет управляющий орган?
6. На какие классы делятся САУ в зависимости от вида входного сигнала?
7. В чем отличие следящей системы от системы программного управления?
1.5. Динамические модели САУ
В общем случае движение управляемой системы можно представить в
виде системы нелинейных дифференциальных уравнений:
dxi
fi x1,.., xn , u1,.., um , i 1, n ,
dt
y j j x1,.., xn , u1,.., um , j 1, m
или в векторном виде
28
dx
f x, u , x t0 x0 ,
dt
(1.8)
y x ,
где x x1,..., xn – вектор состояния системы, y y1,..., yl – вектор выхода
T
T
системы, u u1,..., um – вектор входа системы.
T
Рассмотрим способы построения упрощенных математических моделей
системы (1.8) для решения основных задач ТАУ.
1.5.1. Линеаризация уравнений динамики
Для многих практических задач от уравнения (1.8) можно перейти к более
простым уравнениям в отклонениях от некоторого заданного режима работы
системы x t , которому соответствует номинальное управление u t . Эта пара функций должна удовлетворять уравнению движения:
dx
f x , u , x t0 x0 .
dt
(1.9)
В качестве требуемого движения могут быть постоянные величины:
dx
0 . Тогда уравнению (1.9) соответствует уравнение статики f x , u 0 .
dt
С помощью отклонений x , u координаты системы (1.8) можно выразить через координаты системы (1.9), полагая
x x x , u u u .
Тогда систему (1.8) можно записать в виде:
d x x
dt
f
x
x, u u .
Будем полагать, что функция f является достаточно гладкой функцией
аргументов x и u . Тогда аналогично предыдущему разложим правую часть по
степеням приращений:
dx d x
f
f
f x , u x u ...,
dt
dt
x
u
29
где матрицы
f
x
f1 f1 f1
...
x1 x2 xn
n n ,
...
f n f n
f
... n
x1 x2
xn
f
u
f1 f1
f
... 1
u1 u2
um
...
n m
f n f n
f
... n
u1 u2
um
вычисляются при x x , u u .
Полагая малыми отклонения x t , u t , слагаемыми в правой части
ряда с нелинейными приращениями можно отбросить с допустимой точностью.
Тогда с учетом уравнения (1.9) получим приближенное уравнение возмущенного движения в отклонениях:
d x f
f
x u , x(t0 ) x(t0 ) x* (t0 ) .
dt
x
u
Аналогично можно найти выражение для выхода системы в отклонениях
от его номинального значения:
y y y*
x ,
x
где
x
1 1 1
...
x1 x2 xn
...
l n .
l l
l
...
x1 x2
xn
Для простоты обозначений индекс можно опустить. Тогда с учетом
обозначений A
f
f
, B
, C
получим систему уравнений в матричной
x
x
u
форме
dx
Ax Bu , x t0 x0 ,
dt
(1.10)
y Cx .
Если в качестве номинального режима рассматривается динамический
30
режим, т.е. x и u функции времени, то элементы матриц A , B , C также будут функциями времени, и система называется нестационарной. Отметим, что
нестационарное уравнение (1.10), получено в результате математического преобразования стационарного уравнения (1.8).
Если в качестве номинального режима рассматривается статический режим, то матрицы A , B , C будут постоянными и система называется стационарной.
Пример 1.1. Рассмотрим движение ракеты вертикально вверх. При этом
на нее действуют постоянная сила притяжения G mg , сила сопротивления
среды Fc kv 2 , сила тяги P c
сгорания,
dm
, где c – скорость истечения продуктов
dt
dm
0 – секундный расход массы.
dt
d 2h
Тогда согласно второму закону Ньютона с учетом обозначений a 2 ,
dt
v
dh
получим уравнение динамики
dt
2
d 2h
dm
dh
m 2 P G Fc c
mg k .
dt
dt
dt
Переменными, характеризующими состояние движения ракеты, являются
высота полета h x1 , скорость
dh
x2 , масса m x3 , для которых справедливы
dt
следующие уравнения:
dx1
dt x2 ,
dx
dx2
c 3 x3 g kx22 ,
x3
dt
dt
dx3
dt u,
где u – скорость изменения массы является управляющей функцией.
Если разрешить систему уравнений относительно производных, то получим нормальную форму уравнений, т.е. в форме Коши:
31
dx1
dt x2 ,
kx22
c
dx2
ug
,
dt
x
x
3
3
dx
3 u,
dt
(1.11)
где ускорение g играет роль возмущающего фактора. Если в качестве выходных координат принять координаты x1 и x2 , то вектор выхода можно предста1 0
вить в виде y Cx , где C
– единичная матрица.
0 1
Следует отметить, что постоянное возмущение g также можно представить в виде решения дифференциального уравнения
dg
0 , g t0 g0 .
dt
Если рассматривать заданный режим движения ракеты xi* (t ) , i 1,3 ,
u* (t ) , то для получения уравнения (1.10) необходимо линеаризовать функцию
f 2 x2 , x3 , u
kx 2
c
ug 2 .
x3
x3
В результате получим нестационарную систему вида (1.10):
d x1
dt x2 ,
kx2*2 cu*
2kx2*
c
d x2
* x2 *2 *2 x3 * u,
x3
x3
x3
x3
dt
d x
3
u.
dt
(1.11)
Некоторые САУ удается представить в виде соединения ФЭ, каждый из
которых описывается дифференциальным уравнение не выше второго порядка:
F ( y, y, y, u , u , f ) 0 ,
(1.12)
Данное уравнение определяет зависимость выходной координаты y ФЭ, ее
скорости y и ускорения y от входной координаты u и возмущения f .
Отметим, что уравнение (1.12) соответствует физически реализуемой си-
32
стеме, поскольку порядок старшей производной входного сигнала u не превышает порядка старшей производной выхода y . В противном случае, если рассмотреть, например, уравнение F ( y, u ) y u 0 или y u и на вход ФЭ подать линейно нарастающий сигнал u t , t 0 , то на выходе должен возникнуть
сигнал y 1 . Иначе говоря, при сколь угодно малом значении входа u на выходе формируется сигнал y 1 . Это возможно только при бесконечно большом
усилении входного сигнала, что физически не реализуемо.
Заданному режиму работы системы соответствует режим работы ФЭ y * ,
u * , f * удовлетворяющий уравнению
F * F ( y* , y* , y* , u * , u * , f * ) 0 .
(1.13)
Тогда полагая y y* y , u u * u , f f * f , аналогично предыдущему
получим
F ( y , y , y , u, u, f ) F * F F
a0 y a1y a2 y b0 u b1u d 0 f 0,
(1.14)
Здесь приняты обозначения для коэффициентов разложения
a0
F
F
F
F
F
F
, a1
, a2
, b0
, b1
, d0
,
y
y
y
u
u
f
вычисленные для значений y y* , u u* , f f * . Очевидно, что если y * , u * ,
f * – функции времени, то коэффициенты также будут функциями времени и
уравнение (1.14) является нестационарным. В дальнейшем будем рассматривать
такие режимы работы системы, при которых коэффициенты уравнения ФЭ
(1.14) имеют постоянные значения, т.е. уравнение является стационарным.
Таким образом, в условиях принятых допущений от исходного нелинейного уравнения (1.12) в абсолютных координатах перешли к линейному уравнению (1.14) в отклонениях от заданного режима, т.е. осуществили линеаризацию уравнения (1.12).
С геометрической точки зрения функция F представляет гиперплоскость, касательную к поверхности заданной уравнением (1.12) в точке y * , y * ,
33
y * , u* , u* , f * .
Рассмотрим, например, функцию F ( y, u ) y (u ) 0 или y (u ) , тогда вместо уравнения (1.14) получим уравнение a0 y b0u 0 , где
a0
F
F
1, b0
k .
u
u
y
Тем самым получили уравнение в отклонениях y k u , где коэффициент k
определяет угол наклона касательной функции (u ) в точке А с координатами
u * , y* (u* ) (рис. 1.23). При этом в системе координат u , y функция
(u ) (u* ) заменяется прямой y k u с ошибкой аппроксимации, равной
отрезку bc. Отсюда следует, что чем меньше отклонение u , тем точнее линейная аппроксимация.
Уравнение (1.14) можно записать в относительных отклонениях (в безразмерной
форме) от заданного режима. Наиболее просто
это можно сделать в случае, когда y * , u * , f * –
постоянные значения не равные нулю. Для
этого надо умножить и поделить каждое слагаемое уравнения (1.14) на соответствующую
координату установившегося режима, в результате чего будет получено уравнение в относительных координатах y / y* , u / u* , f / f * с другими коэффициентами.
Для простоты обозначений в уравнении (1.14) знак приращения будем
опускать, полагая также a0 1 , поскольку на коэффициент a0 можно поделить
обе части уравнения. Тогда это уравнение запишем в виде
y a1 y a2 y b0u b1u d 0 f .
(1.15)
Задачей идентификации ФЭ с уравнением (1.15) является определение
значений параметров a1 , a 2 , b0 , b1 , d 0 , например, с помощью аналогового моделирования. Однако в правой части уравнения (1.15) имеется производная
34
входного сигнала u, которую физически реализовать не удается. Для устранения данного недостатка уравнение (1.15) перепишем в виде эквивалентной системы двух уравнений первого порядка с помощью вспомогательной переменной z
dy
:
dt
y z,
z b0u a2 y a1 z b1u d 0 f .
(1.16)
Далее с помощью вспомогательных переменных x1 y , x2 z b0 u уравнение
(1.16) с учетом замены z x2 b0u перепишем в виде:
x1 x2 b0u,
x2 a2 x1 a1 x2 (b1 a1b0 )u d0 f ,
(1.17)
или в матричной форме
x Ax bu df ,
(1.18)
y cT x ,
где x – n - вектор ( n 2 ); A n n - матрица; b , d – n -векторы; cT n - векторстрока («т» – символ транспонирования):
x
0
x 1 , A
a2
x2
1
0 T
b0
,
,
b
d
d , c [1 0] .
b a b
a1
1 1 0
0
Здесь размерность n вектора x совпадает с порядком дифференциального уравнения (1.15).
Уравнения (1.17) не содержат производных от входных сигналов, поэтому по ним можно построить структурную схему с помощью интегрирующих
блоков (рис. 1.24) для начальных условий x1 (0) y (0) , x2 (0) y (0) b1u (0) и
при необходимости составить электрическую модель ФЭ, а также получить
численное решение x(t ) , t 0 на ЦВМ.
Следует отметить, что для определения аналитического решения y(t ) ,
t 0 уравнения (1.15) при заданных функциях u (t ) , f (t ) нет необходимости
для перехода к уравнению (1.18). Для этого можно воспользоваться, например,
методом на основе преобразований Лапласа, который будет рассмотрен ниже.
35
Рис. 1.24
С помощью преобразований Лапласа также удается существенно упростить форму записи дифференциального уравнения (1.15) и использовать это
свойство для преобразования структурных схем САУ.
Вопросы для самопроверки
1. В каком случае можно проводить линеаризацию исходной нелинейной системы?
2. Что понимается под малыми отклонениями от номинального режима?
3. Как записать уравнение ФЭ в безразмерной форме?
4. При каких условиях система уравнений в отклонениях является нестационарной?
5. Каким образом проводится моделирование ФЭ при наличии производную от
входного сигнала?
1.5.2. Преобразование Лапласа
Будем
полагать,
что
функции
u (t ) ,
удовлетворяющей
условию
| u (t ) | Mect при M 0 и c 0 , ставится в соответствие изображение L{u (t )}
или одностороннее преобразование Лапласа U ( p) , определяемое выражением
L{u (t )} U ( p)
u(t )e
pt
dt
(1.19)
0
от комплексной переменной p j , определенной при любых p таких, что
36
Re p c . В этом случае подынтегральное выражение в (1.19) стремится к 0
при t и, следовательно, интеграл сходится. В выражении (1.19) нижний
предел интегрирования рассматривается для момента времени t 0 (при подходе слева). Это необходимо для учета предначального значения u (0) функции u (t ) , которая может иметь разрыв в момент времени t 0 и принимает конечное значение u (0) в момент времени t 0 (при подходе справа).
Если функция u (t ) не имеет разрыва в момент времени t 0 , т.е. выполняется условие u (0) u (0) u (0) , то вместо выражения (1.19) можно использовать формулу
L{u (t )} U ( p) u (t )e pt dt .
0
По изображению U ( p) с помощью обратного преобразования Лапласа
1
L {U ( p)} u (t )
1
j
2 j j
U ( p)e pt dp ,
(1.20)
определяется единственная функция u (t ) при t 0 . Такая функция, удовлетворяющая условиям сходимости интеграла (1.19), называются оригиналом. В
формуле (1.20) путь интегрирования на комплексной плоскости p выбирается
правее особых точек изображения U ( p) , при которых оно обращается в бесконечность. Учитывая сложность вычисления интеграла (1.20) обратное преобразование Лапласа L1{U ( p )} определяют с помощью таблиц соответствия оригиналов и изображений [9].
Таким образом, смысл преобразования Лапласа (1.19) заключается в том,
что функции времени u (t ) ставится в соответствие алгебраическое выражение
от переменной p . Это позволяет заменить операции над оригиналами более
простыми операциями над изображениями, что в дальнейшем будет использовано при упрощении структурных схем САУ.
Пример 1.2. Рассмотрим единичную функцию u (t ) 1(t ) , равную: 1 при
37
t 0 ; 0 при t 0 , с предначальным значением u (0) 1, как показано на
рис.1.25a.
Рис. 1.25. Единичная функция 1(t ) и единичный скачок 1(t )
Функция u (t ) 1(t ) является оригиналом, для которого выполняется неравенство | 1(t ) | Mect при M 1 и c 0 . Тогда согласно (1.19) при c 0 с
учетом равенства | e j t | 1 получим:
1
L 1(t ) 1(t )e pt dt e pt
p
0
0
1
lim e ( j )t lim e ( j )t
p t
t 0
1
1
1
lim e t e j t lim e t e j t 0 1 .
p t
p
p
t 0
Пример 1.3. Рассмотрим единичную ступенчатую функцию или единичный скачок, которая определяется по формуле
1 при t 0,
1(t )
0 при t 0,
с предначальным условием 1(0) 0 . В отличие от единичной функции 1(t )
единичный скачок 1(t ) терпит разрыв при t 0 , поскольку 1(0) 0 и 1(0) 1.
При этом функция 1(t ) является оригиналом, удовлетворяющая тем же ограничениям, что и функция 1(t ) . Поскольку эти функции отличаются лишь в момент
времени t 0 , то интеграл (1.19) для функции 1(t ) будет иметь тоже значение,
что и для функции 1(t ) , т.е. их преобразования Лапласа совпадают.
Таким образом, одному и тому же изображению соответствуют разные
38
функции, значения которых отличаются только в точке t 0 . Учитывая, что
функции совпадают при t 0 , то следует вывод: изображению Лапласа соответствует единственный оригинал для значений t 0 с начальным условием
u (0) в момент времени t 0 , т.е. при подходе справа к точке t 0 .
Пример 1.4. Аналогично определяется изображение для функции
u (t ) еat , удовлетворяющей неравенству | еat | Mect при M 1 и c a . Тогда
при c a или a 0 получим:
L еat еa t e pt dt e( pa ) t dt
0
0
1 ( p a ) t
e
pa
0
1
( a j )t
lim e ( a j )t
lim e
p a t
t 0
1
1
1
( a ) t j t
e
lim e ( a ) t e j t
.
0 1
lim e
p a t
pa
pa
t 0
Рассмотрим основные свойства преобразования Лапласа.
Теорема 1. Линейность преобразования Лапласа. Для любых оригиналов
ui (t ) и постоянных ci выполняется равенство:
n
n
n
n
pt
L ciui (t ) ci ui (t ) e dt ci ui (t ) e pt dt ciU i ( p) .
i 1 0
i 1
i 1
0 i 1
Пример 1.5. Найдем изображение для функции e jt cos t j sin t . Согласно примеру 1.4 при a j получим
L e jt
1
p j
p
2
2
j 2
.
2
2
p j p
p
p 2
С другой стороны, с учетом теоремы линейности имеем
L e jt L cos t jL sin t ,
и тем самым справедливы формулы
L cos t
p
, L sin t 2
.
2
p 2
p
2
Теорема 2. Дифференцирование оригинала. Изображение производной
оригинала u (t ) , если оно существует, при предначальном значении u (0) с
учетом условия | u (t ) | Mect и c имеет вид:
39
L u (t )
u(t )e
pt
0
dt
e
pt
du (t ) u (t )e
pt
0
0
p u (t )e pt dt
0
lim u (t )e ( j )t lim u (t )e ( j )t pU ( p )
t 0
t
0 u (0) pU ( p ) pU ( p ) u (0).
Аналогично для второй производной оригинала u (t ) при дополнительном
начальном значении u (0) с учетом предыдущей формулы получим
d
L u (t ) L u (t ) pL u (t ) u (0) p pU ( p) u (0) u (0)
dt
p 2U ( p) pu (0) u (0).
Очевидно, что для n - ой производной оригинала u (t ) при начальных значениях u (i ) (0) , i 0, n 1 по индукции получим
n1
L u ( n ) (t ) p nU ( p ) p ni 1u (i ) (0) .
i 0
В частном случае при нулевых начальных значениях u (i ) (0) 0 ,
i 0, n 1 получим простую формулу
L u ( n ) (t ) p nU ( p) .
Пример 1.6. Найдем изображение производной для функций 1(t ) и 1(t ) :
1
d
L 1(t ) p 1(0) 1 1 0 ,
p
dt
1
d
L 1(t ) p 1(0) 1 0 1.
p
dt
Полученные изображения указывают на принципиальное отличие функций 1(t ) и 1(t ) .
Пример 1.7. Найдем изображение производной для функций cos(t ) :
p
p
1
d
L cos(t ) p 2
cos(0) p 2
1 2
,
p 1
p 1
p 1
dt
40
которому соответствует оригинал sin(t ) при t 0 .
Теорема 3. Интегрирование оригинала. Найдем изображение для функции
t
оригинала q(t ) q(0) u ( )d , которая является решением дифференциально0
го уравнения q(t ) u (t ) с предначальным условием q(0) q(0) . Тогда используя теорему 2 получим
Lq(t ) pQ( p) q(0) U ( p) .
Отсюда следует, что
t
q (0) 1
Q( p ) L q (0) u ( ) d
U ( p) .
p
p
0
В частном случае при q(0) 0 получим простую формулу
t
1
Q ( p ) L u ( )d U ( p ) .
0
p
Пример 1.8. Изображение для функции u (t ) e at t k 1 имеет вид
L e t
p p a
где
–
t
at k 1
k 1 at pt
е e
0
dt
t
k 1 pt
e
dt ,
0
вспомогательный
оператор
Лапласа.
Здесь
условие
| t k 1 | Mect M 1 ct (ct )2 / 2! ... , c c a выполняется, например, при
значениях M , c , удовлетворяющих неравенству Mck 1 /(k 1)! 1 .
Воспользуемся теоремой 3 учитывая, что t
k 1
t
(k 1) k 2d . Тогда по0
лучим
t
0
k 1 pt
e
t k 2 pt
(k 1) k 2 pt
dt (k 1) d e dt
t e dt .
p
0
0
0
Применяя последовательно этот прием к правой части равенства с учетом обозначения 0! 1 , найдем
41
t
at k 1
L e t
k 1 pt
e
dt
0
(k 1)! (k 1)!
.
pk
( p a)k
В частном случае при a 0 отсюда следует формула
L t k 1
(k 1)!
k!
k
L
t
или
.
p k 1
pk
Теорема 4. Запаздывание аргумента оригинала. Если известен оригинал
u (t ) , то функция u (t ) , смещенная вправо функция u (t ) по оси абсцисс на
величину , при u (t ) 0 , t , также является оригиналом, изображение
которого имеет вид:
L u (t ) u (t )e
0
pt
dt
u(t )e
pt
dt
0
u(t )e
p (t )
d (t )
0
.
e p u (t )e ptdt e p U ( p).
0
Теорема 5. Свертка оригиналов. Для оригиналов u (t ) и w(t ) сверткой явt
t
0
0
ляется интеграл y (t ) u ( ) w(t )d u (t ) w( )d , изображение которого
с учетом условия w(t ) 0 при t 0 имеет вид
t
t
L y (t ) Y ( p) L u ( ) w(t )d u ( ) w(t )d e pt dt
0
0 0
pt
u ( ) w(t )d e dt u ( ) w(t )e p (t )dt d
0
0
0
0
p
u ( )e d w(t )e p (t )d (t )
0
0
p
u ( )e d w(t )e ptdt U ( p ) W ( p ).
0
0
Таким образом, для свертки справедливо изображение
Y ( p ) U ( p )W ( p ) .
42
Теорема 6. Начальное и конечное значение оригинала. По известному
изображению U ( p) требуется определить начальное u (0) и конечное значение
u () оригинала u (t ) . Воспользуемся формулой изображения для дифференци-
рования оригинала, принимая в качестве начального условия u(0) u( 0) , т.е.
значение функции u (t ) при подходе справа к точке t 0 :
u(t ) e
pt
dt pU ( p ) u( 0) ,
0
Отсюда следует, что при p или Re p , 0; Im p справедливо выражение
u(t ) e
p
lim
pt
e
u(t ) plim
dt
0
pt
dt 0 lim pU ( p ) u( 0) ;
p
0
при p 0 или Re p 0, 0; Im p 0 справедливо выражение
lim u(t ) e
p 0
0
pt
dt
e
u(t ) plim
0
pt
dt
0
pU ( p ) u( 0) .
u(t ) dt u() u( 0) plim
0
0
Из полученных выражений следуют формулы
u (0) lim u (t ) lim pU ( p) ,
t 0
p
(1.21)
u () lim u (t ) lim pU ( p)
t
p0
(1.22)
.
Отметим, что формулой (1.22) можно пользоваться только в том случае,
когда известно, что предел u () существует.
Пример 1.9. Для функции cos(t ) с предначальным значением cos(0) 1
согласно формуле (1.21) получим правильный результат:
u (0) lim cos(t ) lim p
t 0
p
p
1.
p2 1
Поскольку предел lim cos(t ) не существует, то формулой (1.22) пользоt
ваться нельзя, которая дает неверный результат:
43
u () lim cos(t ) lim p
t
p0
p
0.
p2 1
Пример 1.10. Для функции 1(t ) с предначальным значением 1(0) 0 согласно формулам (1.21), (1.22) найдем
1(0) lim 1(t ) lim p
t 0
p
1
1
1 , 1() lim 1(t ) lim p 1.
p
t
p0 p
Теорема 7. Определение оригинала с помощью разложения изображения
на сумму простейших дробей. Пусть задано изображение U ( p) m( p) / d ( p) ,
где
m( p ) b0 p m b1 p m1 ... bm1 p bm , m n ;
n
d ( p ) p n a1 p n 1 ... an 1 p an ( p pi ) .
i 1
Здесь корни pi уравнения d ( p) 0 называются полюсами, а корни уравнения
m( p) 0 называются нулями изображения U ( p) .
В случае различных полюсов pi ( i 1, n ) изображение U ( p) можно представить в виде:
U ( p)
cn
c1
c2
...
,
p p1 p p2
p pn
(1.23)
где коэффициенты разложения ci определяются по формуле
ci U ( p)( p pi ) p p , i 1, n ,
i
(1.24)
что следует из выражения (1.23). Из выражения (1.23) также следует, что порядок числителя m изображения U ( p) не превышает порядка n его знаменателя.
Тогда оригинал u (t ) с помощью обратного преобразования Лапласа для
разложения (1.23) с учетом выражения L1 1/( p pi ) e pit будет иметь вид
n
u (t ) ci e pit ,
(1.25)
i 1
В случае различных полюсов pi , i 1, кратности ni ( n n1 ... n )
44
изображение U ( p) представляется в виде
U ( p ) U i ( p ) ,
(1.26)
i 1
где каждое слагаемое также представляется в виде суммы
U i ( p)
ci1
p pi
ci 2
p pi
2
...
cini
p pi
ni
.
Здесь сначала определяется коэффициент cini по формуле
.
cini U ( p)( p pi ) ni
p pi
Затем находим разность изображений
U ( p) U ( p)
cini
p pi ni
m( p )
,
d ( p)
у которой после сокращения полином d ( p ) имеет полюс pi меньшей кратности, равной ni 1 . Тогда можно определить коэффициент ci ,ni 1 по формуле
ci ,ni 1 U ( p)( p pi ) ni 1
p pi
.
Повторяя последовательно этот прием, последним определяется коэффициент ci1 .
Тогда оригинал u (t ) для разложения (1.26) с помощью обратного преоб-
разования Лапласа с учетом выражения L1 1/( p pi )k e pit t k 1 /(k 1)! (при
0! 1 ) будет иметь вид
p t ni cik t k 1
u (t ) e i
(
k
1)!
i 1
k 1
.
(1.27)
В формулах (1.25), (1.27) вещественным полюсам pi соответствуют вещественные коэффициенты разложения ci или ci j , комплексно-сопряженным
полюсам
pi i j i ,
pi 1 pi i j i
соответствуют
комплексно-
45
сопряженные коэффициенты ci , ci 1 ci или ci j , ci 1, j ci j , поэтому в результате преобразований выражения (1.25), (1.27) будут вещественными.
Пример 1.11. Найдем оригинал изображения с помощью его разложения
на сумму простейших дробей:
U ( p)
p
p
c1
c2
,
2
( p j )( p j ) p j p j
p
2
для которого по формуле (1.24) найдем коэффициенты c1 c2 1/ 2 . Тогда оригинал определяется по формуле
1
u (t ) L
U ( p) c1e
jt
c2e
jt
e jt e jt
cos t .
2
Свойство 1.1. Из формулы (1.25) следует, что если все полюсы pi ,
i 1, n имеют отрицательные вещественные части
Re pi i 0 , то
lim u (t ) 0 . Это справедливо также для выражения (15), поскольку в этом
t
случае при любой степени k 1 существует lim e pit t k 1 0 . Такие решения
t
u (t ) называются асимптотически устойчивыми.
Свойство 1.2. Если хотя бы один полюс pi имеют положительную
вещественную часть Re pi i 0 , то lim u (t ) и такие решения u (t )
t
называются неустойчивыми.
Вопросы для самопроверки
1. Каким условиям должен удовлетворять оригинал и почему?
2. Какой единственный оригинал соответствует изображению Лапласа?
3. Чем отличается единичный скачок от единичной функции?
4. Чем отличаются изображения операций дифференцирования и интегрирования оригинала?
5. Какой оригинал соответствует произведению изображений?
6. В чем особенность начального значения оригинала, определяемого по из-
46
вестному его изображению?
7. В каких случаях по известному изображению можно найти конечное значение оригинала?
8. В чем преимущество использования преобразования Лапласа?
1.5.3. Передаточные функции
Для упрощения записи дифференциального уравнения (1.15) используются передаточные функции в символьном виде с использованием оператора
дифференцирования s и передаточные функции в изображениях Лапласа с
оператором p .
1) Передаточные функции в символьном виде
С учетом символа дифференцирования s d / dt , s 2 d 2 / dt 2 , рассмотренное ранее, уравнение (1.15) можно переписать в виде
s
2
a1s a2 y b1s b2 u d0 f ,
из которого следует выражение для выходной координаты
y Wyu ( s) u Wy f (s) f ,
(1.28)
где передаточные функции Wyu ( s ) и Wy f ( s) в символьном виде с учетом обозначений d ( s ) s 2 a1s a2 , m( s ) b1s b2 , l ( s ) d 0 определяются по формулам
Wyu ( s)
m( s )
l ( s)
, Wy f ( s )
.
d ( s)
d (s)
Здесь нижний индекс в передаточной функции указывает выход и соответствующий вход.
В общем случае для дифференциальных уравнений n-го порядка полиномы имеют вид:
m( s ) b0 s m b1s m1 ... bm1s bm ,
d ( s ) s n a1s n 1 ... an 1s an .
Передаточные функции в символьном виде нельзя рассматривать как
47
обычную дробь, например, сокращать общие множители числителя и знаменателя, они являются лишь удобным способом записи уравнений.
2) Передаточные функции в изображениях Лапласа
Проведем преобразование Лапласа левой и правой части уравнения (1.15)
с учетом свойства линейности и дифференцирования оригинала. Тогда с учетом
обозначений Y ( p) L{ y(t )} , U ( p) L{u (t )} , F ( p) L{ f (t )} и выражений
L{ y(t )} pY ( p) y(0) ,
L{ y (t )} p 2Y ( p) py (0) y (0) ,
L{u (t )} pU ( p) u (0)
из уравнения (1.15) после преобразования получим
p
2
a1 p a2 Y ( p ) y(0) p y(0) a1 y(0) b1 p b2 U ( p ) d0 f b1u(0) .
Отсюда найдем выражение для изображения выхода
Y ( p)
d0
b1 p b2
U ( p) 2
F ( p)
p a1 p a2
p a1 p a2
2
y ( 0) p y( 0) a1 y( 0) b1u( 0)
p 2 a1 p a2
(1.29)
.
В отличие от уравнения (1.28) выражение (1.29) является алгебраическим,
допускающим, например, сокращение общих множителей числителя и знаменателя дробей, и позволяющим определять решение y(t ) с помощью обратного
преобразования Лапласа.
На практике часто предначальные значения входа, выхода и их производных у ФЭ являются нулевыми, поэтому, полагая y(0) y(0) 0 , u (0) 0 , из
выражения (1.29) получим
Y ( p) Wyu ( p)U ( p) Wy f ( p) F ( p) ,
(1.30)
где передаточные функции Wyu ( p) и Wy f ( p) в изображениях Лапласа с учетом
обозначений d ( p) p 2 a1 p a0 , m( p) b1 p b0 , l ( p ) d 0 определяются по
формулам
48
Wyu ( p)
m( p)
l ( p)
, Wy f ( p )
.
d ( p)
d ( p)
Из выражения (1.30) следует принцип суперпозиции: реакция системы на
несколько входных воздействий равна сумме реакций на каждое воздействие в
отдельности.
В случае когда выход системы y зависит от одного входного сигнала u, то
для краткости будем писать Wyu ( p) W ( p) . Тогда изображение выхода имеет
вид
Y ( p ) W ( p )U ( p ) ,
(1.31)
где в общем случае для дифференциальных уравнений n-го порядка полиномы
имеют вид:
m( p) b0 p m b1 p m1 ... bm1 p bm
y
,
x
d ( p) p n a1 p n1 ... an1 p an .
Из выражения (1.31) следуют два определения передаточной функции:
Определение 1.1. Передаточной функцией называется:
1) отношение изображения выхода к изображению входа
W ( p)
Y ( p)
;
U ( p)
2) отношение оператора входа к оператору выхода
W ( p)
m( p )
,
d ( p)
при нулевых начальных условиях входа, выхода и их производных.
Следует отметить, что для физической реализуемости ФЭ с передаточной
функцией W ( p) необходимо, чтобы выполнялось условие m n . Это объясняется тем, что если m n , то при делении полинома m( p) на d ( p ) можно выделить целую часть в виде полинома, зависящего от переменной p , которой соответствуют операции дифференцирования входного сигнала u (t ) . Поскольку
49
операция дифференцирования физически не реализуема, то и ФЭ с передаточной функцией при m n физически нереализуем.
Например, передаточная функция
p2 p 1
1
W ( p)
p
p 1
p 1
физически не реализуема.
Пример 1.12. Найдем передаточные функции для системы стабилизации
скорости по уравнениям (1.3)-(1.5), из которых с учетом преобразования Лапласа при нулевых начальных условиях и исключения промежуточной переменную I я ( p ) , получим выражение для ( p) :
( p )
cм
Lя p Rя
U у ( p)
M c ( p) .
2
JLя p JRя p cм cе
JLя p JRя p cм cе
2
(1.31)
Обычно индуктивность Lя малая величина и ею можно пренебречь. Тогда выражение (1.31) с учетом принятых обозначений kдв 1 / cе , kдвf Rя / (cмcе ) ,
Tдв Jkдвf можно записать в виде:
( p) Wдв ( p)U у ( p) Wдвf ( p) M c ( p) ,
(1.32)
где передаточные функции
kдвf
kдв
f
, Wдв ( p )
Wдв ( p )
Tдв p 1
Tдв p 1
записаны в стандартном виде, т.е. когда свободные члены полиномов числителя и знаменателя не нулевой степени имеют значение единица. Удобство такой формы записи заключается в том, что коэффициенты, стоящие при операторах p , имеют размерность секунда в степени соответствующего оператора
p . Действительно, уравнению (1.32) с учетом обратного преобразования
Лапласа соответствует дифференциальное уравнение
Tдв
d
kдвuу kдвf M c ,
dt
50
из которого следует, что коэффициент Tдв , называемый постоянной времени,
имеет размерность секунда. При этом коэффициенты kдв , kдвf согласовывают
размерность входного и выходного сигналов и называются коэффициентами
передачи. Если у этих коэффициентов нет размерности, то они называются коэффициентами усиления.
Если в числителе и знаменателе передаточной функции W ( p) в изображениях Лапласа имеются одинаковые множители или, иначе говоря, одинаковые нули и полюса, то при определении оригинала y(t ) по изображению (1.31)
допускается сокращение указанных множителей. Однако следует иметь в виду,
что после сокращения общих множителей, понижается порядок передаточной
функции и соответствующее ей дифференциальное уравнение отличается от
исходного уравнения. Поэтому нельзя упрощать выражение передаточной
функции, если эта операция математически не обоснована.
Таким образом, передаточная функция W ( s) в символьном виде и в изображениях Лапласа W ( p) совпадают с точностью обозначения s p , если не
проводятся сокращения в передаточной функции W ( p) .
Вопросы для самопроверки
1. Чем отличается передаточная функция в символьном виде от передаточной
функции в преобразованиях Лапласа?
2. Какими принимаются предначальные условия для определения передаточных функций в символьном виде и в преобразованиях Лапласа?
3. Чем отличаются два определения передаточной функции?
4. Изменится ли оригинал выхода системы, если сократить общие множители в
числителе и знаменателе передаточной функции?
5. В чем измеряется постоянная времени передаточной функции и почему?
1.5.4. Временные характеристики
В задачу анализа динамики САУ входит исследование движения системы,
т.е. изменение состояния системы во времени. По виду реакции системы на
51
входные воздействия судят о ее динамических свойствах.
Рассмотрим сначала, из чего складывается движение системы при отработке входных воздействий.
1.5.4.1. Структура движения системы
Для пояснения сказанного рассмотрим реакцию выхода ФЭ по изображению Лапласа (1.29), полагая для простоты f (t ) 0 :
Y ( p)
y ( 0) p y( 0) a1 y( 0) b0u( 0)
b0 p b1
.
U
(
p
)
p 2 a1 p a2
p 2 a1 p a2
(1.33)
Выражение (1.33) представим в виде
Y ( p ) Yсв ( p ) Yвын ( p ) ,
(1.34)
где
Yсв ( p )
y( 0) p y( 0) a1 y( 0)
p 2 a1 p a2
(1.35)
соответствует свободному движению yсв (t ) , вызванному ненулевыми начальными условиями выходной координаты y(t ) ,
Yвын ( p )
b0 p b1
b u( 0)
U ( p) 2 0
.
p a1 p a2
p a1 p a2
2
(1.36)
соответствует вынужденному движению увын (t ) , вызванному входным воздействием u (t ) с учетом его начальных условий.
Если изображение входного сигнала U ( p)
m( p )
, то выражение (1.36) с
d ( p)
помощью формулы разложения (1.23) или (1.26) можно представить в виде
Yвын ( p )
b0u( 0)
m1 ( p )
m2 ( p )
.
p 2 a1 p a2 d ( p ) p 2 a1 p a2
(1.37)
Выражение (1.37) можно записать следующим образом
Yвын ( p) Yсоб ( p) Yуст ( p) ,
где
(1.38)
52
Yсоб ( p )
b0u( 0)
m1 ( p )
p 2 a1 p a2 p 2 a1 p a2
(1.39)
соответствует собственному движению yсоб (t ) , вызванному входным воздействием, но независящего от его вида,
Yуст ( p )
m2 ( p )
d ( p)
(1.40)
соответствует установившемуся движению yуст (t ) , зависящего только от вида
входного воздействия (полюсов уравнения d ( p ) 0 ).
Тогда окончательно можно записать
Y ( p ) Yпер ( p ) Yуст ( p ) ,
(1.41)
где
Yпер ( p ) Yсв ( p ) Yсоб ( p )
y( 0) p y( 0) a1 y( 0) m1 ( p ) b0u( 0)
p 2 a1 p a2
,
(1.42)
соответствует yпер (t ) yсв (t ) yсоб (t ) – переходное движение, которое зависит
от полюсов pi , i 1, n ( n 2 ) полинома оператора входа
d ( p ) p 2 a1 p a2 ( p p1 )( p p2 ) .
Таким образом, структура полного движения выхода y(t ) ФЭ с учетом
обратного преобразования Лапласа можно представить следующим образом
y(t ) yсв (t ) yвын (t ) yсв (t ) yсоб (t ) yуст (t ) yпер (t ) yуст (t ) , (1.43)
Представление (1.43) справедливо для решения дифференциального
уравнения произвольного порядка.
Согласно свойству 1.1 решения yсв (t ) , yсоб (t ) затухают при Re pi 0 ,
i 1, n , поэтому спустя некоторое время, называемое временем установления
переходного процесса t y (или временем регулирования tр ), будет выполняться
условие y(t ) yуст (t ) при t t y для произвольного входа u (t ) .
Если имеются полюса pi , у которых Re pi 0 , то согласно свойству 1.2 с
53
течением времени решения yсв (t ) , yсоб (t ) расходятся и определить yуст (t ) по
измерениям выхода y(t ) для заданного входа u (t ) не удается. Однако в этом
случае можно подобрать начальные условия y (0) , y (0) , u (0) , при которых числитель изображения (1.42) обращается в ноль и y(t ) yуст (t ) . Однако при этом
малые изменения начальных условий, вида входного сигнала, а также параметров системы приводят к проявлению свойства неустойчивости системы. Отсюда следует важный вывод:
Для определения свойств асимптотической устойчивости движения системы с помощью эксперимента необходимо учитывать произвольные
начальные условия, произвольные входные воздействия, а также малые изменения параметров системы.
Пример 1.13. Найдем реакцию системы
y y 1(t ) , y ( 0) y0 .
Переходя к преобразованию Лапласа, получим
Y ( p)
y (0)
1
.
p 1 p p 1
С учетом представления
1
1
1
,
p p 1 p 1 p
получим выражение для изображения Лапласе переходного движения
Yпер ( p ) Yсв ( p ) Yсоб ( p )
y( 0) 1
,
p 1
и установившегося движения
Yуст ( p )
1
.
p
Отметим, что переходное движение имеет вид
yпер (t ) L1 Yпер ( p) y(0) 1 et ,
то есть является неустойчивым, что ставит под сомнение существование уста-
54
новившегося движения. Однако при y (0) 1 получим yпер (t ) 0 , то есть система сразу переходит к установившемуся движению
y(t ) yпер (t ) yуст (t ) 1
при t 0 .
1.5.4.2. Типовые входные сигналы
Одним из способов анализа движения системы на практике является построение ее реакции выхода на типовые входные воздействия u (t ) , при нулевых начальных условиях (значениях входа, выхода и их производных). В качестве типовых входных воздействий используются сигналы, соответствующие
изучаемому свойству системы.
Различают следующие типовые сигналы.
1) Единичный скачок 1(t ) , который с физической точки зрения можно
рассматривать, как предел lim (t , ) 1(t ) функции (t , ) , указанной на
0
рис.1.26. Функция 1(t ) используется для имитации скачкообразного изменения
команды или возмущения.
Рис. 1.26
Рис. 1.27
2) Импульсная функция (t ) , являющаяся пределом прямоугольного импульса (t , ) d (t , ) / dt с единичной площадью (рис. 1.27) при 0 , которая определяется по формулам
при t 0,
(t )
0 при t 0,
(t )dt 1.
(1.44)
На графиках - функция обозначается стрелкой со знаком бесконечности ее
55
значения амплитуды и единицей – значения площади импульса. Данная функция используется для имитации короткого ударного воздействия.
Установим связь единичного скачка 1(t ) и импульсной функции (t ) . Для
этого найдем производную от функции 1(t ) :
при t 0;
d
0
.
1(t )
lim (t , ) при t 0.
dt
0
Поскольку интеграл
d
dt 1(t )dt d1(t ) 1() 1() 1 0 1 ,
то справедливо выражение
d
1(t ) (t ) .
dt
(1.45)
С помощью выражений (1.44) найдем изображение Лапласа для функции
(t ) :
L (t ) (t )e
0
pt
dt (0)e
p0
0
dt
(t )dt 1.
Данный результат также можно получить с помощью выражения (1.45):
1
d
L{ (t )} L 1(t ) p 1(0) 1 0 1 .
p
dt
Функцию (t ) удобно использовать для задания начальных условий системы с помощью входного воздействия. Например, для двух способов представления системы:
y ay , y (0) y0 ;
y ay y0 (t ) , y (0) 0 ,
получим одно и тоже изображение Лапласа
Y ( p)
y0
.
pa
Такой способ задания начальных условий позволяет рассматривать си-
56
стемы при нулевых начальных условиях и при необходимости задавать их с
помощью (t ) функций через входные воздействия.
3) Гармонический сигнал, определяемый по формуле u (t ) um cos t или
u (t ) um sin t , используется для имитации периодических воздействий, а так-
же может выступать в качестве эквивалентного входного сигнала, если для сигнала u (t ) известны его максимальные по модулю скорость umax и ускорение
umax . В этом случае эквивалентный сигнал можно записать в виде
uэ (t ) umax sin э t ,
где э umax / umax , umax u 2max / umax .
Для определения реакции системы y(t ) при нулевых начальных условиях
на типовое входное воздействие u (t ) можно воспользоваться выражением
Y ( p) W ( p)U ( p) .
Тогда при известном изображении U ( p) реакцию y(t ) можно найти с помощью обратного преобразования Лапласа
y(t ) L1 Y ( p) L1 W ( p)U ( p) ,
(1.46)
при использовании теоремы 7 и таблиц изображений и оригиналов.
Реакция выхода y(t ) при нулевых начальных условиях, построенная для
входного сигнала 1(t ) или (t ) с помощью выражения (1.46), называется временной функцией, а ее график – временной характеристикой.
В зависимости от вида входного воздействия временные характеристики
делятся на переходную характеристику и весовую характеристику. Рассмотрим их свойства.
1.5.4.3. Переходная характеристика
Определение 1.2. Реакция выхода системы y(t ) на единичный скачок 1(t )
при нулевых начальных условиях называется переходной функцией, которая обозначается символом h(t ) .
Учитывая, что для единичного скачка U ( p) 1/ p , переходная функция
57
согласно (1.46) определяется по формуле
W ( p )
h(t ) L 1H ( p ) L 1
.
p
(1.47)
По известному изображению H ( p) можно найти конечное значение оригинала h() lim h(t ) , если он существует, по формуле (1.22):
t
h() lim pH ( p) .
p0
(1.48)
1.5.4.4. Весовая характеристика
Определение 1.3. Реакция выхода системы y(t ) на импульсную функцию
(t ) при нулевых начальных условиях называется весовой функцией, которая обозначается символом w(t ) .
Учитывая, что для u (t ) (t ) изображение U ( p ) 1, весовая функция согласно (1.46) определяется по формуле
w(t ) L 1W ( p) .
(1.49)
Установим связь переходной и весовой функций. Согласно (1.47) имеем
H ( p)
W ( p)
.
p
Данное выражение перепишем в виде
pH ( p) W ( p) ,
которому соответствует уравнение для оригиналов:
d
h(t ) w(t ) .
dt
(1.50)
Уравнение (1.50) лежит в основе экспериментального метода определения весовой характеристики по измеренной переходной характеристике h(t ) .
Зная весовую характеристику w(t ) можно найти реакцию систему на произвольное входное воздействие u (t ) с помощью теоремы 5:
58
1
y (t ) L
t
t
W ( p)U ( p) w(t )u( )d w( )u(t )d .
0
(1.51)
0
Вычисление интеграла (1.51) можно проводить методами численного интегрирования.
По экспериментально найденной весовой характеристике можно построить приближенную передаточную функцию.
Пример 1.14. Рассмотрим систему с передаточной функцией
W ( p)
k
,
T p 1
для которой найдем переходную и весовую характеристику.
По формуле (1.47) получим
1
t
k
T
1 1
T
L
kL
k 1(t ) e .
p
p(T p 1)
p T p 1
1W ( p )
h(t ) L
1
C помощью формулы (1.49) найдем
1
1
k k T t
w(t ) L W ( p) L
e .
T
p
1
T
1
Решение аналогичной задачи для передаточных функций W ( p) общего
вида можно проводить с помощью вычислительного пакета MatLab. При этом
для построения характеристики h(t ) используется команда step, а для построения весовой характеристики команда impulse. С помощью фрагмента программы для принятых значений параметров k 10 , T 0,5 :
k=10;T=0.5;W=tf(k,[T 1]);step(W);hold on; impulse(W);grid
на рис. 1.28 приведены графики указанных характеристик.
59
Рис. 1.28
Вопросы для самопроверки
1. Чем отличается собственное движение от свободного движения системы?
2. Что характеризует переходное движение системы?
3. При каких условиях строятся временные характеристики?
4. Какой физический смысл имеет - функция?
5. В чем отличие переходной и весовой характеристик?
6. Как связаны переходная и весовая характеристики?
7. С помощью какой характеристики можно построить реакцию системы на
произвольное входное воздействие?
1.5.5. Частотные характеристики
Частотные характеристики строятся по установившейся реакции системы
на входной гармонический сигнал.
Пусть линейная система имеет один вход и один выход и записывается
дифференциальным уравнением
a0 y ( n) (t ) a1 y (n1) (t )
b0u ( m) (t ) b1u ( m1) (t )
an y (t )
bmu (t ),
(1.52)
которому при нулевых начальных условиях соответствует уравнение в изображениях Лапласа
Y ( p) W ( p)U ( p) ,
с передаточной функцией
60
m( p ) b0 p m b1 p m1
W ( p)
d ( p ) a0 p n a1 p n1
bm
,
an
(1.53)
где выполняется условие m n физической реализуемости системы.
Подадим на вход системы гармонический сигнал u (t ) um cos t , который
с помощью формулы Эйлера e jt cos t j sin t можно представить в виде
e jt e jt
u (t ) um
u1 (t ) u2 (t ) ,
2
где u1 (t ) ume jt / 2 , u2 (t ) ume jt / 2 .
Найдем отдельно реакции системы y1 (t ) и y2 (t ) на составляющие u1 (t ) и
u2 (t ) . Тогда реакция линейной y(t ) системы на u (t ) равна сумме реакций:
y (t ) y1 (t ) y2 (t ) .
При подаче на вход системы (1.52) сигнала u1 (t ) на выходе возникает переходной процесс y1 (t ) , который содержит переходную и установившуюся составляющие движения. Если переходное движение со временем затухает, то на
выходе системы установятся вынужденные гармонические колебания. Для их
определения установившееся решение будем искать в виде y1 (t ) A1u1 (t ) , которое
подставим
в
уравнение
u1(1) (t ) ( j )ume jt / 2 ( j )u1(t ) ,
(1.52).
u1(i ) (t ) ( j )i u1 (t ) ,
С
учетом
равенств
y1(i ) (t ) ( j )i A1u1 (t )
из
уравнения (1.52) найдем
d ( j ) A1u1 (t ) m( j )u1 (t ) .
Отсюда следует, что A1 m( j ) / d ( j ) W ( j ) . Функцию W ( j ) комплексного переменного можно представить как в декартовой
W ( j ) U ( ) jV ( ) ,
(1.54)
так и в полярной системе координат
W ( j ) A( )e j ( ) ,
(1.55)
где
A( ) | W ( j ) |
| m( j ) |
U 2 ( ) V 2 ( ) ,
| d ( j ) |
(1.56)
61
( ) arctg
V ( )
k , k 0,1,2,..
U ( )
(1.57)
При этом справедливы зависимости
U ( ) A( )cos ( ) , V ( ) A( )sin ( ) .
С помощью выражения (1.55) решение y1 (t ) можно записать в виде
y1 (t ) A1u1 A( )e j ( )ume jt / 2 A( )ume j (t ( )) / 2 .
Для определения вынужденного решения y2 (t ) на входной сигнал
u2 (t ) ume jt / 2 воспользуемся следующим свойством: в силу равенств
j j 1 и ( j )( j ) 1 все операции над комплексными выражениями будут
сохраняться с точностью до знака при замене j на j . В силу данного свойства
решение y2 (t ) будет иметь вид
y2 (t ) A( )ume j (t ( )) / 2 .
Тогда окончательно получим
e j (t ( )) e j (t ( ))
y(t ) y1(t ) y2 (t ) A( )um
A( )um cos t ( ) .
2
Таким образом, на выходе системы устанавливаются вынужденные гармонические колебания с амплитудой ym A( )um , частотой и фазовым сдвигом ( ) относительно входного сигнала. При этом A( ) , ( ) зависят от частоты и вида передаточной функции W ( p) и не зависят от амплитуды um
входного сигнала. Отсюда следует методика экспериментального определения
характеристик A( ) , ( ) :
1. С генератора синусоидальных колебаний на вход исследуемого объекта
подаётся гармоническое воздействие заданной частоты и произвольной, но
допустимой по величине амплитуды um .
2. После завершения переходного процесса измеряют амплитудные значения колебаний на выходе ym исследуемого объекта.
3. По осциллографу определяют разность в фазах выходных и входных
гармонических колебаний, выражают её в градусах или радианах и получают
62
аргумент ( ) .
4.
Вычисляют
модуль
частотной
характеристики
по
формуле
A( ) ym / um .
5. На генераторе изменяют частоту гармонических колебаний и для нового её значения повторяют всю процедуру, начиная с п.1.
Графики функций A( ) и ( ) при изменении 0 называются амплитудно-частотной характеристикой (АЧХ) и фазовой частотной характеристикой (ФЧХ) соответственно.
График функции W ( j ) , построенный на комплексной плоскости при
изменении 0 , называется амплитудно-фазовой частотной характеристикой (АФЧХ) (рис. 1.21). Очевидно, что по известным характеристикам A( )
и ( ) можно построить характеристику W ( j ) и наоборот. Следует отметить,
что если вектор W ( j ) на комплексной плоскости вращается против часовой
стрелки, то фазовый угол ( ) принимает положительное значение, если по
часовой стрелке, то отрицательное значение. Это следует из выражения
e j cos j sin , где при малом повороте против часовой стрелки значение
sin 0 , что соответствует 0 .
1.5.5.1. Свойства АФЧХ
Рассмотрим свойства АФЧХ физически реализуемых систем с передаточной функцией (1.53) при 0 .
1) При 0 АФЧХ начинается на вещественной оси (рис. 1.29):
W ( j 0) bm / an при an 0 .
2) При АФЧХ заканчивается на вещественной оси (рис. 1.29):
b / a при m n,
W ( j ) 0 0
при m n.
0
63
Рис. 1.29
3) Если an 0 , то можно записать d ( p) pd ( p) . Тогда при 0 и
bm / an1 0 получим
W ( j 0)
bm
b
m( j 0)
j m j ,
0 an1
j 0 d ( j 0) j 0 an1
при этом (0) / 2 (рис. 1.30).
Рис. 1.30
Рис. 1.31
4) Если an 0 , an1 0 , то можно записать d ( p) p 2d ( p ) . Тогда при
0 и bm / an2 0 получим
W ( j 0)
b
m( j 0)
m ,
2
0 an2
( j 0) d ( j 0)
при этом (0) (рис. 1.31).
Таким образом, если уравнение d ( p) 0 имеет нулевых корней, то
64
можно записать d ( p) p v d ( p) и начальное значение фазы (0) / 2 .
5) Если d ( p) ( p 2 *2 )d ( p) , то получим
W ( j )
m( j )
( j ) 2 *2 d ( j )
m( j )
2 *2 d ( j )
.
При * знаменатель обращается в ноль и АФЧХ имеет разрыв второго рода (рис. 1.32). Действительно, при * справедливы выражения:
m( j* )
m( j* )
=
при *;
*
*
d ( j )
0 d ( j )
W ( j* )
*
*
m( j ) =- m( j ) при *.
0 d ( j* )
d ( j* )
Отсюда следует, что при * значение фазы скачком меняется на .
Рис. 1.32
1.5.5.2. Логарифмические частотные характеристики и их свойства
В инженерной практике широкое применение получили логарифмические
частотные характеристики (ЛЧХ), отличающиеся от предыдущих частотных
характеристик масштабами представления.
Логарифмическая амплитудная частотная характеристика (ЛАХ)
определяется по формуле
L( ) 20lg A( ) .
(1.58)
Единицей измерения по оси ординат является децибел (дБ), заимствован-
65
ный из акустики, единицей деления является 20 дБ. Логарифмическая фазовая
частотная характеристика (ЛФХ) ( ) по оси ординат строится в равномерном натуральном масштабе с единицей деления / 4 . Общий для ЛАХ и ЛФХ
параметр – частота откладывается в логарифмическом масштабе lg( / * ) , характеризующем изменение частоты относительно базовой частоты * . Единица
десятикратного изменения частоты называется декадой. Значение * определяет начало координат в логарифмическом масштабе и может назначаться произвольно. В системных исследованиях обычно * 1 рад/с, в экспериментальных
условиях удобно начало координат связать с началом частотного диапазона генератора синусоидальных колебаний.
Таким образом, ЛАХ (1.58) является полностью логарифмической как по
оси ординат, так и по оси абсцисс, а ЛФХ является полулогарифмической. При
построении ЛЧХ по экспериментальным данным их преимущества никак не
проявляются. Более того, необходимы дополнительные вычисления по формуле
(1.58) и вычисление координат по оси абсцисс по формуле
lg
f
lg
,
*
f*
где 2 f , f – частота в герцах (Гц). Однако, только в логарифмических
масштабах возможно однозначное восстановление фазовой характеристики для
минимально-фазовых систем по логарифмической амплитудной характеристике. Это исключает необходимость измерения ( ) , что существенно упрощает
эксперимент.
Рассмотрим свойства ЛАХ и ЛФХ для произвольной передаточной функции (1.53). Для этого найдем корни полинома числителя (нули) и корни полинома знаменателя (полюса) передаточной функции, и полиномы числителя и
знаменателя передаточной функции (1.53) представим в виде произведения
простейших множителей:
66
W p
m( p )
d ( p)
k i p 1
i 1
p
v
i2 p 2 2i i p 1
i 1
(Ti p 1) (Ti
i 1
i 1
.
2
(1.59)
p 2iTi p 1)
2
Здесь множители Ti p 1 соответствуют вещественным корням pi 1 / Ti , а
множители Ti 2 p 2 2iTi p 1 при 0 i 1 комплексно-сопряженным корням
1 i2
pi ,i 1 j
уравнения d ( p) 0 . Аналогичные корни соответствуют
Ti
Ti
i
уравнению m( p) 0 . Множители p v соответствуют нулевым корням знаменателя при v 0 и числителя при v 0 . Коэффициенты i и i называются коэффициентами демпфирования.
Таким образом, передаточную функцию (1.59) можно представить в виде
произведения типовых передаточных функций:
N
W ( p) Wi ( p) ,
(1.60)
i 1
где типовые передаточные функции Wi ( p ) приведены в таблице 1.1.
Таблица 1.1.
№
Название типового звена
Передаточная
функция
Нули /полюса
1.
Безынерционное звено
k
2.
Дифференцирующее звено
p
p1 0
3.
Интегрирующее звено
p1 0
4.
Форсирующее звено первого
порядка
Апериодическое звено
1
p
Tp 1
5.
6.
7.
Форсирующее звено второго
порядка
Колебательное звено
p1 1/ T
1
Tp 1
p1 1/ T
T 2 p 2 2 Tp 1
p1,2 / T j 1 2 / T
1
T 2 p 2 2 Tp 1
p1,2 / T j 1 2 / T
67
Название типовых звеньев следует из вида их переходных характеристик
[1], поведение которых зависит от нулей и полюсов передаточной функции:
дифференцирующее и интегрирующее звено осуществляют дифференцирование и интегрирование входного сигнала соответственно; выход апериодического звена имеет монотонно нарастающий процесс, не превышающий установившегося значения; выход колебательного звена имеет затухающие колебания относительно установившегося значения.
Представленные в таблице 1.1 звенья с положительными коэффициентами, у которых нули или полюса имеют отрицательные вещественные части или
равные нулю, называются минимально-фазовыми. В таблице 1.2 приведены неминимально-фазовые звенья с отрицательными коэффициентами, у которых
нули или полюса имеют положительные вещественные части.
Таблица 1.2.
№
Название типового звена
1.
Неминимально-фазовое форсирующее звено первого порядка
Неминимально-фазовое апериодическое звено
2.
3.
4.
Неминимально-фазовое форсирующее звено второго порядка
Неминимально-фазовое колебательное звено
Передаточная
функция
Нули /полюса
Tp 1
p1 1/ T
1
Tp 1
p1 1/ T
T 2 p 2 2 Tp 1
p1,2 / T j 1 2 / T
1
T 2 p 2 2 Tp 1
p1,2 / T j 1 2 / T
Подставим в (1.60) p j и получим частотную передаточную функцию
N
W ( j ) Wi ( j )
(1.61)
i 1
С учетом выражения (1.55) можно записать
N
N
W ( j ) A( )e j ( ) Ai ( )e ji ( )
i 1
Отсюда следуют формулы
N
j i ( )
.
Ai ( ) e i 1
i 1
68
N
A( ) Ai ( ) ,
(1.62)
i 1
N
( ) i ( ) .
(1.63)
i 1
Переходя к логарифмической амплитудной частотной характеристике получим выражение
N
N
i 1
i 1
L( ) 20lg A( ) 20lg Ai ( ) 20lg Ai ( ) .
Тем самым справедлива формула
N
L( ) Li ( ) ,
(1.64)
i 1
т.е. ЛАХ произвольной передаточной функции равна сумме ЛАХ типовых звеньев.
Таким образом, для построения ЛАХ передаточной функции необходимо
знать ЛАХ типовых передаточных функций, приведенных в таблицах 1.1, 1.2.
Вопросы для самопроверки
1.
Какой физический смысл имеют АЧХ и ФЧХ системы при подаче на ее
вход гармонического сигнала?
2. Почему поворот фазового угла против часовой стрелки считается положительным?
3. В какой точке заканчивается АФЧХ?
4. Как экспериментально построить АЧХ и ФЧХ системы?
5. Имеет ли смысл АФЧХ для неустойчивых ОУ?
6. В чем отличие АЧХ и ЛАХ, ФЧХ и ЛФХ?
7. Каким свойством обладает ЛАХ передаточной функции?
1.5.6. Логарифмические частотные характеристики типовых звеньев
Рассмотрим свойства частотных характеристик типовых звеньев, приве-
69
денных в таблице 1.1. Для каждого звена проведем построение АФЧХ и соответствующих ЛАХ и ЛФХ.
1.5.6.1. Безынерционное (усилительное) звено
1) Для построения АФЧХ в передаточную функцию подставим p j и
выделим вещественную и мнимую часть:
W ( j ) k U ( ) jV ( ) .
Отсюда следует, что U ( ) k , V ( ) 0 . На рис. 1.25 приведен график АФЧХ в виде точки на вещественной оси.
При этом из графика видно, что при изменении 0
ФЧХ равна нулю.
2) Для построения ЛАХ и ЛФХ воспользуемся формулами
A( ) | W ( j ) | U 2 V 2 k ,
( ) arctg
V ( )
0
arctg 0 .
U ( )
k
Отсюда следует, что ЛАХ L( ) 20lg k , построенная в логарифмическом
масштабе lg имеют вид рис. 1.26, а ЛФХ ( ) 0 .
Рис. 1.26
С физической точки зрения из данных характеристик следует, что установившийся гармонический выходной сигнал имеет один и тот же коэффициент усиления на всех частотах и совпадает по фазе с входным сигналом. Это
объясняется тем, что безынерционное звено изменят только значение амплитуды входного сигнала.
70
1.5.6.2. Дифференцирующее звено
1) Для построения АФЧХ в передаточную функцию подставим p j и
выделим вещественную и мнимую часть:
W ( j ) j U ( ) jV ( ) .
Отсюда следует, что U ( ) 0 , V ( ) . На рис.1.27
приведен график АФЧХ, из которого следует, что при
изменении 0 ФЧХ равна / 2 .
2) Для построения ЛАХ и ЛФХ воспользуемся
формулами
A( ) | W ( j ) | U 2 V 2 ,
( ) arctg
V ( )
arctg .
U ( )
0 2
Отсюда следует, что ЛАХ L( ) 20lg , построенная в логарифмическом
масштабе lg , является графиком прямой линии с наклоном 20 дБ/дек относительно оси частот (рис. 1.28), а ЛФХ ( ) / 2 .
Рис. 1.28
1.5.6.3. Интегрирующее звено
1) Для построения АФЧХ в передаточную функцию подставим p j и
выделим вещественную и мнимую часть:
W ( j )
1
1
j U ( ) jV ( ) .
j
Отсюда следует, что U ( ) 0 , V ( ) 1/ . На рис.1.29 при-
71
веден график АФЧХ, из которого следует, что при изменении 0 ФЧХ
( ) равна / 2 .
2) Для построения ЛАХ и ЛФХ воспользуемся формулами
A( ) | W ( j ) | U 2 V 2 1/ ,
( ) arctg
V ( )
1
arctg
.
U ( )
0
2
Отсюда следует, что ЛАХ L( ) 20lg (1/ ) 20lg , построенная в логарифмическом масштабе lg , является графиком прямой линии с наклоном
20 дБ/дек относительно оси частот (рис. 6), а ЛФХ ( ) / 2 .
Рис. 1.30
Тем самым ЛЧХ интегрирующего звена симметричны ЛЧХ дифференцирующего звена относительно оси частот.
1.5.6.4. Форсирующее звено первого порядка
1) Для построения АФЧХ в передаточную функцию подставим p j и
выделим вещественную и мнимую часть:
W ( j ) Tj 1 U ( ) jV ( ) .
Отсюда следует, что U ( ) 1 , V ( ) T / 1 ,
где 1 1/T – сопрягающая частота. На рис. 1.31 приведен график АФЧХ, из которого следует, что при изменении 0 ФЧХ изменяется 0 ( ) / 2 .
2) Для построения ЛАХ и ЛФХ воспользуемся формулами
A( ) | W ( j ) | U 2 ( ) V 2 ( ) 1 2 / 12 ,
72
( ) arctg
V ( )
arctg .
U ( )
1
Отсюда следуют выражения для асимптот ЛАХ и ЛФХ:
при 1;
20 lg1 0,
L( ) 20 lg 1 2 / 12 20 lg( / 1 ) 20 lg 20 lg 1 , при 1;
при 1;
20 lg 2 3 дБ,
при 1;
0,
( ) arctg ( / 1 ) / 2, при 1;
/ 4, при ;
1
Графики ЛАХ и ЛФХ при 1 1 приведены на рис. 1.32.
Рис. 1.32
Из рис. 1.32 следует, что асимптотическая ЛАХ (отмечена пунктиром)
достаточно точно описывает ЛАХ за исключением окрестности сопрягающей
частоты 1 , в которой сопрягаются (пересекаются) две асимптоты. Это учитывается при приближенном ручном построении ЛАХ. Для приближенного построения
ЛФХ
следует
учитывать,
что
при
101
значение
( ) arctg10 84,29 , а при 1001 значение ( ) arctg100 89,43 .
73
1.5.6.5. Апериодическое звено
1) Для построения АФЧХ в передаточную функцию подставим p j и
выделим вещественную и мнимую часть:
W ( j ) 1/(Tj 1)
где
U ( )
1
1
,
1
1 2 / 12
2
,
/ 12
j
V ( )
/ 1
U ( ) jV (
1 2 / 12
/ 1
,
1 2 / 12
где
1 1/T – сопрягающая частота.
На рис. 1.33 приведен график АФЧХ, из которого следует, что при изменении 0 ФЧХ
изменяется / 2 ( ) 0 .
2) Для построения ЛАХ и ЛФХ воспользуемся формулами
A( ) | W ( j ) |
( ) arctg
1
| Tj 1 |
1
1
2
/ 12
,
V ( )
arctg
arctg .
U ( )
1
1
Отсюда следуют выражения для асимптот ЛАХ и ЛФХ:
L( ) 20lg 1 2 / 12 , ( ) arctg
,
1
которые отличаются от ЛАХ и ЛФХ форсирующего звена первого порядка
только знаком, т.е. симметричны им относительно оси частот (рис. 1.34).
74
Рис. 1.34
1.5.6.6. Форсирующее звено второго порядка
1) Для построения АФЧХ в передаточную функцию подставим p j и
выделим вещественную и мнимую часть:
W ( j ) T 2 ( j ) 2 2 T ( j ) 1 U ( ) jV ( ) .
Отсюда
следует,
2
V ( )
1
что
2
U ( ) 1 2 ,
1
, где 1 1/T – сопрягающая ча-
стота. На рис. 1.35 приведен график АФЧХ,
из которого следует, что при изменении
0 ФЧХ изменяется 0 ( ) .
2) Для построения ЛАХ используется выражение
A( ) | W ( j ) | U 2 ( ) V 2 ( )
1 2 / 12
2
4 2 2 / 12 .
При построении ЛФХ необходимо пользоваться составным выражением
выражение:
75
2 / 1
при 1 ;
arctg 1 2 / 2 ,
V ( )
1
( ) arctg
U ( )
2 / 1
arctg
, при 1 ,
2
2
1
/
1
которое соответствует изменению фазы 0 ( ) , как на рис. 1.35.
Тогда ЛАХ будет иметь вид: L( ) 20lg
1
2
/ 12
2
4 2 2 / 12 .
Для построения асимптот запишем следующие выражения:
при 1;
20 lg1 0,
L( ) 20 lg| W ( j ) | 20 lg( 2 / 12 ) 40 lg 40 lg 1 , при 1;
20 lg(2 / ),
при 1;
1
при 1;
0,
( ) / 2, при 1;
, при .
1
Графики ЛАХ и ЛФХ при 1 1 для различных значений 0 1 приведены на рис. 1.36. Для 0 при 1 значение ЛАХ L(1 ) 20lg (0) , а
ЛФХ имеет скачок фазы со значения 0 до . Физически это означает, что амплитуда гармонических колебаний выходного сигнала на частоте 1 стремится к нулю, т.е. сигнал на выходе системы отсутствует.
Рис. 1.36
76
1.5.6.7. Колебательное звено
1) Для построения АФЧХ в передаточную функцию подставим p j и
выделим вещественную и мнимую часть:
W ( j )
1
1
T ( j ) 2 T ( j ) 1
2
2
1 2 / 12
2
/ 12
2
4
2
2
/ 12
j
1
2 / 1
2
/ 12
2
4
2
2
U ( ) jV ( ),
/ 12
где 1 1/T – сопрягающая частота. Отсюда следует, что
U ( )
1
1 2 / 12
2
/ 12
2
4
2
2
/ 12
,
V ( )
1
2 / 1
2
/ 12
2
4
2
2
/ 12
.
На рис. 1.57 приведен график АФЧХ, из которого следует, что при изменении
0 ФЧХ изменяется ( ) 0 . При 0 ФЧХ имеет скачок фазы со
значения 0 до (на рис. 1.57 это отображено двумя стрелками) при этом АЧХ
принимает бесконечно большое значение.
Рис. 1.37
2) Для построения ЛАХ и ЛФХ воспользуемся формулами
A( ) | W ( j ) |
1
| T ( j ) 2 T ( j ) 1|
2
2
1
1
2
/ 12
2 / 1
при 1 ;
arctg 1 2 / 2 ,
V ( )
1
( ) arctg
U ( )
2 / 1
arctg
, при 1 .
1 2 / 12
2
,
4
2
2
/ 12
77
Отсюда следует выражение для ЛАХ:
L( ) 20lg
1
2
/ 12
2
4 2 2 / 12 .
Тем самым ЛАХ и ЛФХ колебательного звена отличаются от ЛАХ и
ЛФХ форсирующего звена второго порядка только знаком, т.е. симметричны
им относительно оси частот. Графики ЛАХ и ЛФХ при 1 1 для различных
значений 0 1 приведены на рис. 1.38. Для 0 при 1 значение ЛАХ
L(1 ) 20lg (0) , а ЛФХ имеет скачок фазы со значения 0 до . Физически
это означает, что амплитуда гармонических колебаний выходного сигнала на
частоте 1 стремится к бесконечности. Данное явление называется резонансом.
При 0 колебательное звено называется консервативным, имеющего
пару чисто мнимых полюсов p1,2 j1/ T .
Рис. 1.38
Аналогично определяются частотные характеристики для неминимальнофазовых звеньев, приведенных в таблице 1.2. Для данных звеньев АФЧХ отличаются от АФЧХ их аналогов знаком у реальной или мнимой части. Поэтому
АЧХ и ЛАХ неминимально-фазовых звеньев совпадают с соответствующими
78
АЧХ и ЛАХ минимально-фазовых звеньев, при этом отличаются только ФЧХ.
Чтобы не ошибиться в аналитическом представлении ЛФХ, необходимо предварительно построить АФЧХ и определить диапазон изменения фазы ( ) .
В качестве примера рассмотрим особенности неминимально-фазовое звеньев на примере аналогов форсирующего звена первого порядка и апериодического звена.
1.5.6.8. Неминимально-фазовое форсирующее звено первого порядка
1) Для построения АФЧХ в передаточную функцию W ( p) Tp 1 подставим p j и выделим вещественную и мнимую часть:
W ( j ) Tj 1 U ( ) jV ( ) .
Отсюда следует, что U ( ) 1 , V ( ) T / 1 , где
1 1/T – сопрягающая частота. На рис. 1.39 приведен
график АФЧХ, из которого следует, что при изменении 0 ФЧХ изменяется в пределах / 2 ( ) .
2) Для построения ЛАХ и ЛФХ воспользуемся формулами
A( ) | W ( j ) | U 2 ( ) V 2 ( ) 1 2 / 12 ,
( ) arctg
V ( )
k arctg k .
U ( )
1
Отсюда следует выражение для ЛАХ
L( ) 20lg 1 2 / 12 ,
которое совпадает с ЛАХ звена W ( p) Tp 1 .
Для того чтобы аналитическое выражение для ЛФХ соответствовало диапазону изменения фазы АФЧХ рис. 1.39, следует воспользоваться формулой
( ) arctg
.
1
Графики ЛАХ и ЛФХ при 1 1 приведены на рис. 1.40.
79
Рис. 1.40
1.5.6.9. Неминимально-фазовое апериодическое звено
1) Для построения АФЧХ в передаточную функцию W ( p)
1
подTp 1
ставим p j и выделим вещественную и мнимую часть:
W ( j )
где U ( )
1
/ 1
j
U ( ) jV ( ) ,
Tj 1 1 2 / 12
1 2 / 12
1
1
/ 1
, V ( )
, 1 1/T – сопрягающая частота.
2
2
1 / 1
1 2 / 12
На рис. 1.41 приведен график АФЧХ, из которого следует, что при изменении 0 ФЧХ изменяется ( ) / 2 .
2) Для построения ЛАХ и ЛФХ воспользуемся формулами
A( ) | W ( j ) |
( ) arctg
1
| Tj 1 |
1
1
V ( )
arctg .
U ( )
1
Отсюда следуют выражения для ЛАХ:
L( ) 20lg 1 2 / 12 .
2
/ 12
,
80
Графики ЛАХ и ЛФХ при 1 1 приведены на рис. 1.42.
Рис. 1.42
Построение частотных характеристик для неминимально-фазового форсирующего звена второго порядка и колебательного звена провести самостоятельно.
1.5.6.10. Звено чистого запаздывания
Наряду с рассмотренными типовыми звеньями в передаточную функцию
системы также может входить трансцендентное звено чистого запаздывания с
передаточной функцией W ( p ) e p , где – время запаздывания. При подаче
сигнала u (t ) на вход такого звена, на выходе, спустя время , формируется
сигнал u (t ) . Это следует из теоремы 4 преобразования Лапласа о запаздывании аргумента оригинала.
Построим частотные характеристики для звена чистого запаздывания.
1) Для построения АФЧХ в передаточную функцию подставим p j и
выделим вещественную и мнимую часть:
W ( j ) e j cos( ) j sin( ) U ( ) jV ( ) .
Отсюда следует, что U ( ) cos( ) , V ( ) sin( ) .
На рис. 1.43 приведен график АФЧХ, из которого следует,
81
что при изменении 0 ФЧХ изменяется ( ) 0 .
2) Для построения ЛАХ и ЛФХ воспользуемся формулами
A( ) | W ( j ) | cos 2 ( ) sin 2 ( ) 1 ,
( ) arctg
V ( )
sin( )
arctg
arctg tg ( ) .
U ( )
cos( )
Отсюда следует выражение для ЛАХ:
L( ) 20lg1 0 .
Таким образом, звено чистого запаздывания не изменяет амплитуду
входного сигнала, а вызывает только запаздывание его по фазе.
1.5.6.11. Методика построения ЛАХ и ЛФХ
На основе свойства ЛАХ (1.64) по известным ЛАХ типовых звеньев можно построить асимптотическую ЛАХ для произвольной передаточной функции,
приведенной к виду (1.59). Алгоритм построения состоит в следующем:
определяется значение 20lg k и отмечается на оси ординат;
определяются сопрягающие частоты i 1/ Ti , i 1/ i и вычисляются
значения lg i , которые откладываются на оси частот;
строится асимптотическая ЛАХ:
через точку 20lg k проводится слева направо прямая с наклоном 20v
дБ/дек до первой слева сопрягающей частоты, где v – число интегрирующих
звеньев в передаточной функции (если v 0 , то прямая проводится параллельно оси частот; если вместо интегрирующих звеньев присутствуют дифференцирующих звеньев, то следует принять v и наклон асимптоты будет
положительным);
в сопрягающей частоте ЛАХ терпит излом относительно предыдущего
участка на 20 дБ/дек или 40 дБ/дек. Если сопрягающей частоте соответствует звено первого порядка, то излом составляет 20 дБ/дек, для звена второго порядка (с комплексно-сопряженными корнями) соответственно 40 дБ/дек. Знак
"+" соответствует звеньям, расположенных в числителе, а знак "–" в знаменате-
82
ле передаточной функции;
далее проводится прямая до следующей сопрягающей частоты, в которой
ЛАХ терпит излом аналогично предыдущему;
в области высоких частот ЛАХ уходит в бесконечность с наклоном
20(m n) дБ/дек, где m – порядок числителя, n – порядок знаменателя переда-
точной функции.
На основе свойства ЛФХ (1.63) по известным ЛФХ типовых звеньев
можно построить ЛФХ для произвольной передаточной функции, приведенной
к виду (1.59):
ЛФХ строится в виде суммы ЛФХ типовых звеньев, входящих в передаточную функцию, при этом для минимально-фазовых звеньев в области низких
частот ЛФХ начинается со значения v / 2 рад, а в области высоких частот
ЛФХ стремится к значению (m n) / 2 рад.
По ЛАХ минимально-фазовой системы можно восстановить ее передаточную функцию и ЛФХ используя свойства ЛАХ и ЛФХ типовых звеньев.
Для построения АФЧХ по передаточной функции W ( p) в системе
MATLAB можно воспользоваться командой nyquist(W), для построения
ЛАХ и ЛФХ – командой bode(W) [2].
Вопросы для самопроверки
1. В чем особенность сопрягающей частоты?
2. Какой физический смысл имеет безынерционное звено?
3. В чем отличие ЛЧХ дифференцирующего от интегрирующего звена?
4. В чем отличие ЛЧХ форсирующего звена первого порядка от апериодического звена?
5. В чем отличие ЛЧХ форсирующего звена второго порядка от колебательного звена?
6. Какой наклон ЛАХ и значение ЛФХ имеет передаточная функция, содержа-
83
щая два интегрирующих звена?
7. Чем отличаются неминимально-фазовые звенья от минимально-фазовых?
8. Как изменяется сигнал на выходе звена чистого запаздывания?
9. Какое начальное и конечное значение имеет ЛФХ для минимально-фазовых
звеньев?
10. От чего зависит наклон ЛАХ в области низких и высоких частот?
1.5.7. Структурные схемы САУ и их эквивалентное преобразование
Функциональная схема САУ состоит из соединений ФЭ, выделенных отдельными блоками, точки обозначают ветвление сигнала, перечеркнутый кружок со стрелками означает суммирование сигнала, если сектор закрашен, то это
означает вычитание сигнала. Если ФЭ заменить их передаточными функциями,
то получится структурная схема системы.
Установим правила преобразования структурных схем для основных видов соединений ФЭ. Для простоты обозначений на структурных схемах вместо
изображений Лапласа сигналов будем указывать обозначения их оригиналов, в
передаточных функциях опускать переменную p .
1. Последовательное соединение передаточных функций ФЭ представлено на рис. 1.44, которому соответствует эквивалентная передаточная функция
W.
Рис. 1.44
Рис. 1.45
В соответствии со структурной схемой имеем следующие зависимости:
y1 W1u , y2 W2 y1 , …, y Wn yn1 .
Исключая последовательно промежуточные переменные y1 , …, yn1 получим
выражение
y Wn ...W2W1u Wu .
84
Таким образом, для последовательно соединенных передаточных функций эквивалентная передаточная функция определяется по формуле
n
W ( p) Wi ( p)
(1.65)
i 1
и структурную схему можно представить с помощью эквивалентного блока согласно рис. 1.45.
2. Параллельное соединение передаточных функций ФЭ представлено на
рис. 1.46, которому соответствует эквивалентная передаточная функция W .
В соответствии со структурной схемой имеем следующие зависимости:
y1 W1u , y2 W2u , …, y Wnu ,
y y1 y2 ... yn .
Исключая промежуточные переменные y1 , …, y n получим выражение
y W1 W2 ... Wn u Wu .
Таким образом, для параллельно соединенных передаточных функций эквивалентная передаточная функция определяется по формуле
n
W ( p ) Wi ( p ) .
(1.66)
i 1
Рис. 1.46
Рис. 1.47
3. Соединение с отрицательной обратной связью передаточных функций
ФЭ представлено на рис. 4, которому соответствует эквивалентная передаточная функция W .
В соответствии со структурной схемой имеем следующие зависимости:
85
g Wос y ,
y W.
(1.67)
Исключая промежуточную переменную получим выражение
y W g Wос y ,
из которого найдем
y
W
g,
1 Wраз
где Wраз WWос – передаточная функция разомкнутой системы (разомкнутой
перед устройством сравнения).
Таким образом, для соединения с отрицательной обратной связью эквивалентная передаточная функция выхода от входа определяется по формуле
Wyg ( p )
W ( p)
.
1 Wраз ( p )
Для соединений с обратной связью необходимо также знать передаточную функцию ошибки от входа g . Исключая из уравнений (1.67) промежуточную переменную y , получим выражение
g WосW ,
из которого найдем
1
g.
1 Wраз
Таким образом, для соединения с отрицательной обратной связью эквивалентная передаточная функция выхода от входа определяется по формуле
W g ( p )
1
.
1 Wраз ( p )
3. Обобщенная структурная схема соединения передаточных функций
ФЭ представлена на рис. 1.48, для которой справедливы следующие зависимости:
86
Рис. 1.48
В соответствии со структурной схемой имеем следующие зависимости:
g Wос y,
(1.68)
y W2 W1 W f f .
Найдем сначала зависимость выхода y от входных сигналов, исключая из
уравнений (1.68) промежуточную переменную . В результате получим уравнение
y W2 W1 g Wос y W f f ,
из которого следует выражение
W1W2
W f W2
y
g
f Wyg g Wy f f ,
1 Wраз
1 Wраз
с передаточными функциями по каналу "вход-выход"
Wyg ( p )
W1 ( p )W2 ( p )
,
1 Wраз ( p )
и каналу "возмущение-выход"
W f ( p )W2 ( p )
Wy f ( p )
.
1 Wраз ( p )
где Wраз ( p ) W1 ( p )W2 ( p )Wос ( p ) .
Найдем теперь зависимость ошибки от входных сигналов, исключая из
уравнений (1.68) промежуточную переменную y . После аналогичных преобразований получим выражение
W f W2Wос
1
g
f W g g W f f ,
1 Wраз
1 Wраз
87
с передаточными функциями по каналу "вход-ошибка"
W g ( p )
1
,
1 Wраз ( p )
и каналу "возмущение-ошибка"
W f ( p )W2 ( p )Wос ( p )
W f ( p )
.
1 Wраз ( p )
Для облегчения запоминания приведенных формул можно пользоваться
следующим правилом: в числителе искомой передаточной функции указывается произведение передаточных функций по пути прохождения выбранного
входного сигнала с учетом знаков сумматоров, через которые проходит сигнал,
до заданного выходного сигнала; в знаменателе передаточной функции указывается выражение 1 Wраз ( p) (для отрицательной обратной связи).
Общее правило определения передаточных функций для произвольных
структурных схем основано на формуле Мейсона [4, стр. 74]. Однако для простых структурных схем рекомендуется использовать их эквивалентные преобразования с помощью следующих операций.
1. Перенос узла через блок по ходу движения сигнала (рис. 1.49).
Рис. 1.49
Здесь для левой и правой схемы выполняются равенства: z u и z W 1Wu u .
2. Перенос узла через блок против хода движения сигнала (рис. 1.50).
Рис. 1.50
88
Здесь для левой и правой схемы выполняются равенства: z y Wu и z Wu .
3. Перенос сумматора через блок по ходу движения сигнала (рис. 1.51).
Рис. 1.51
Здесь для левой и правой схемы выполняются равенства: y W (u z ) и
y Wu Wz W (u z ) .
4. Перенос сумматора через блок против движения сигнала (рис. 1.52).
Рис. 1.52
Здесь для левой и правой схемы выполняются равенства: y Wu z и
y Wu WW 1z Wu z .
В процессе преобразования структурных схем необходимо стремиться
привести их к обобщенному виду рис. 1.48.
Пример 1.15. Преобразуем структурную схему на рис. 1.48. Для этого
перенесем второй сумматор против движения сигнала. Тогда получим эквивалентную структурную схему рис. 1.53, где и выход y связан с входными
сигналами с помощью выражения
W1W2
W2W f
W f W1W2
y
f
g
f,
g
1 Wраз
W1 1 Wраз
1 Wраз
которому соответствуют выше полученные передаточные функции.
89
Рис. 1.53
Пример 1.16. Для структурной схемы рис. 1.54 найти эквивалентную передаточную функцию выхода от входа.
Рис. 1.54
Для решения задачи необходимо привести структурную схему рис. 1.54 к
виду обобщенной структурной схемы рис. 1.48. Для этого узел 1 перенесем
вперед через передаточную функцию W3 . Тогда получим эквивалентную структурную схему рис. 1.55.
Рис. 1.55
Применяя последовательно правило построение эквивалентных передаточных функций для звеньев, охваченных обратной связью, получим выражения:
90
W3
W3
W2W3
W0W1W2
, W2
,
.
W
1 W3
1 W1W2
1 W2W3W31
Здесь после подстановки выражений передаточных функций получим
выражение W ( p) m( p) / d ( p) . При этом выход системы имеет вид
Y ( p ) W ( p )G( p )
m( p )
G( p ) ,
d ( p)
bm , d ( p ) a0 p n a1 p n 1
где, m( p ) b0 p m b1 p m1
an .
Отсюда следует, уравнение в изображениях Лапласа
d ( p)Y ( p) m( p)G( p) ,
которому с учетом обратного преобразования Лапласа соответствует дифференциальное уравнение
a0 y ( n ) (t ) a1 y (n 1) (t )
b0 g
( m)
(t ) b1g
( m 1)
(t )
an y (t )
bm g (t ).
(1.69)
Тем самым, с помощью передаточных функций и эквивалентных преобразований структурных схем удается исключать промежуточные переменные
системы исходных дифференциальных уравнений, по которым построена
структурная схема.
Следует отметить, что из уравнения (1.69) при g (t ) 0 в общем случае не
следует уравнение свободных движений выхода y(t ) , зависящих от начальных
условий y (0) , y (1) (0) , …, y ( n1) (0) , поскольку в полином d ( p ) входит полином
знаменателя передаточной функции W0 ( p ) .
Поэтому для анализа динамики свободных движений системы сначала
надо положить g (t ) 0 , а затем искать соответствующее дифференциальное
уравнение замкнутой системы.
Если, например, в уравнениях (1.68) положить g 0 , f 0 . Тогда получим уравнения
Wос y ,
из которых найдем
y W2W1 ,
91
1 Wраз y 0 .
Полагая Wраз ( p ) m( p ) / d ( p ) , получим уравнение в изображениях Лапласа
D( p)Y ( p) 0 ,
(1.70)
где D( p) d ( p) m( p) – характеристический полином замкнутой системы.
При этом свободное движение y(t ) определяется корнями характеристического уравнения D( p) 0 . Действительно, уравнению (170) в изображении Лапласа
соответствует дифференциальное уравнение
a0 y(n) (t ) a1 y(n1) (t )
an y(t ) 0 .
(1.71)
Тогда переходя к преобразованию Лапласа в уравнении (1.71) с учетом
начальных
условий
y (0) ,
y (1) (0) ,…,
y ( n1) (0)
получим
выражение
Y ( p) M ( p) / D( p) , где M ( p ) – полином, зависящий от начальных условий.
Согласно теореме 7 оригинал y (t ) L1{Y ( p)} зависит от корней уравнения
D( p ) 0 .
В системе MATLAB имеется возможность составить схему САУ путем
предварительного ввода моделей простых звеньев и последующего соединения
этих звеньев в единую структуру.
Пример 1.17. Для структурной схемы рис. 1.54 при заданных передаточных функциях можно найти передаточную функцию W для выхода y от входа
g с помощью следующих команд [2]:
Wa=append(W0,W1,W2,1,W3);
in=[1]; out=[5];
Q=[2 1 -5 0;3 2 -4 0;4 3 -5 0;5 4 0 0];
W=connect(Wa,Q,in,out)
Вопросы для самопроверки
1. В чем отличие эквивалентных передаточных функций для последовательного
и параллельного соединения передаточных функций?
2. Чем отличаются передаточные функции замкнутой системы при отрицательной и положительной обратной связи?
92
3. В чем смысл эквивалентных преобразований структурных схем?
4. Как определяется характеристическое уравнение одномерной системы?
5. Какую роль играют корни характеристическое уравнение системы?
1.5.8. Многомерные системы
Рассмотренные выше структурные схемы относятся к одномерным системам. Если в системе имеется несколько входов и выходов, то такая система
называется многомерной или многосвязной, если выходы в системе взаимосвязаны. Примером многомерной и многосвязной системы может служить летательный аппарат, у которого управляемыми величинами являются курс, углы
тангажа и крена, скорость и высота полета.
В многомерных системах при нескольких входных воздействиях ui (t ) ,
i 1, m изображение для выходной координаты yi (t ) i 1, l определяется выражением
m
Yi ( p) Wij ( p)U j ( p) ,
(1.72)
j 1
где Wij ( p) mij ( p) / dij ( p) , i 1, l ; j 1, m – передаточные функции ФЭ, которые
называются собственными при j i и перекрестными связями при j i , устанавливающими связь i - го выхода с j - м входом.
Выражение (1.72) можно записать в матричном виде:
Y ( p) W ( p)U ( p) ,
где Y ( p) [Y1 ( p) Y2 ( p)
Yl ( p)]T , U ( p) [U1 ( p) U 2 ( p)
(1.73)
U m ( p)]T ; W ( p) l m
- передаточная матрица с элементами Wij ( p) .
На структурной схеме выражение (1.73) представляется одним из многомерных блоков, изображенных на рис. 1.56а с двойными стрелками сигналов.
93
а
б
Рис. 1.56
Многомерные блоки также могут иметь различные соединения, как и одномерные блоки. При определении эквивалентных передаточных матриц используются матричные операции и их свойства. Например, для обобщенной
структурной схемы вида рис. 1.56б, где g – m – вектор, , y – l - вектор, f p вектор, матрицы W1 , W2 , Wос , W
f
соответствующих размеров, получим урав-
нения для выхода
f
El W2WW
1 ос y W2W1g W2W f ,
(1.74)
где El – l l - единичная матрица, имеющая отличные от нуля только диагональные элементы, равные единице. Отсюда получим выражение
y Wyg g Wyf f ,
или
Y ( p) Wyg ( p)G( p) Wyf ( p) F ( p) ,
где
1
W yg ( p ) El W2 ( p )W1 ( p )Wос ( p ) W2 ( p )W1 ( p ) ,
1
Wyf ( p ) El W2 ( p )W1 ( p )Wос ( p ) W2 ( p )W f ( p ) .
Найдем характеристическое уравнение системы (1.74). Для этого в уравнении (1.74) положим g 0 , f 0 , тогда получим уравнение свободного движения:
El W2 ( p)W1( p)Wос ( p) Y ( p) 0 ,
с характеристичексим уравнением
94
| El W2 ( p)W1( p)Wос ( p) |
D( p )
0,
d ( p)
(1.75)
Корни уравнения D( p) 0 определяют характер свободного движения y(t ) .
Запишем уравнение для рассогласования :
Em WосW2W1 g WосW2W f f ,
которому соответствует характеристическое уравнение
| Em Wос ( p)W2 ( p)W1( p) |
D( p )
0.
d ( p)
(1.76)
Из уравнений (1.175) и (1.176) следует равенство
| El W2 ( p)W1 ( p)Wос ( p) || Em Wос ( p)W2 ( p)W1( p) | ,
которое известно в матричном анализе, и выражается равенством
| El AB || Em BA | ,
(1.77)
где A l m , B m l – матрицы. Эффективность формулы (1.177) проявляется
при различных значениях размерностей m и n.
Если исходная многомерная система представлена уравнениями от переменных пространства состояний
x Ax Bu,
x(0) x0 ,
y Cx Du,
где x n - вектор состояния; u m - вектор входа, y l - вектор выхода; матрицы A , B , C , D соответствующих размеров, то с помощью преобразования
Лапласа L{x(t )} X ( p) , L{x(t )} pX ( p) x( 0) , x( 0) x(0) , L{u (t )} U ( p) ,
получим
pEn A X ( p) x(0) BU ( p),
Y ( p ) CX ( p ) DU ( p ).
Отсюда найдем выражение изображения для оригинала x(t ) :
1
1
X ( p) pEn A x(0) pEn A BU ( p) .
(1.78)
Тогда при начальных условиях x(0) 0 получим изображение вектора
выхода
95
Y ( p) W ( p)U ( p) .
где W ( p) l m - передаточная матрица определяется по формуле
1
W ( p) C pEn A B D .
(1.79)
Следует отметить, что передаточная функция системы (1.79) инвариантна
к преобразованию подобия вектора состояния x .
Действительно, в результате подстановки x M x , | M | 0 в уравнение
(1.77) и умножения слева на обратную матрицу M 1 получим
x M 1 AM x M 1Bu ,
y CM x D.
(1.80)
Передаточная функция данной системы в соответствии с формулой (1.79) будет
иметь вид
W ( p) CM pEn M 1 AM
1
M 1B D CM M 1 pEn A M
1
1
M 1B D
1
CMM 1 pEn A M M 1B D C pEn A B D W ( p ) .
Тем самым, передаточные функции исходной и преобразованной системы
(1.80) совпадают.
Для задания в системе MATLAB передаточных матриц можно использовать команду, формирующую массив одномерных передаточных функций.
Например, при заданных элементах передаточной матрицы
W ( p ) W12 ( p )
W ( p ) 11
,
W
(
p
)
W
(
p
)
21
22
можно воспользоваться командой W=[W11 W12;W21 W22]
Для определения корней характеристического уравнения D( p) 0 используется команда tzero(eye(l)+W)
Вопросы для самопроверки
1. В чем отличие передаточной матрицы от передаточной функции?
2. Всегда ли можно использовать эквивалентные преобразования для много-
96
мерных систем?
3. Как определяется характеристическое уравнение многомерной системы?
5. Что понимается под инвариантностью передаточной функции к подобному
преобразованию?
1.5.9. Переход от операторного уравнения вход-выход к системе дифференциальных уравнений
Многие электромеханические системы могут быть представлены векторным уравнением в операторах Лапласа:
D( p)Y ( p) M ( p)U ( p) ,
(1.81)
где Y ( p ) – l - изображение вектора выхода, U ( p) – m - изображение вектора
входа; D( p ) , M ( p ) – матричные полиномы вида
D( p ) A0 p k A1 p k 1
Ak , M ( p ) B0 p k B1 p k 1
Bk ,
с постоянными матрицами Ai l l , Bi l m , i 1, k . Если порядок полинома
M ( p ) ниже порядка полинома D( p ) , то в полиноме M ( p ) соответствующие
матрицы необходимо принять нулевыми.
Уравнению (1.81) соответствует матричное дифференциальное уравнение, если оператор p заменить символом дифференцирования s d / dt :
D( s) y M ( s)u .
(1.82)
Для решения данного уравнения на ЭВМ необходимо его представить в
форме Коши в переменных пространства состояний (1.77). Для этого перепишем уравнение (1.82) в виде схемы Горнера:
Ak y Bk u s Ak 1 y Bk 1u ... A1 y B1u s A0 y B0u ... 0 .
Введем вспомогательные переменные:
x1 A0 y B0u , x2 A1 y B1u x1 , … , xk Ak 1 y Bk 1 xk 1 ,
с помощью которых получим систему уравнений
97
x1 x2 A1 y B1u,
...
xk 1 xk Ak 1 y Bk 1u,
xk Ak y Bk u.
Полагая, что выполняется условие | A0 | 0 , найдем выражение для вектора выхода y A01 x1 A01B0u , который подставим в полученную систему:
x1 x2 A1 A01 x1 B1 A01B0 u,
...
1
1
xk 1 xk Ak 1 A0 x1 Bk 1 A0 B0 u,
1
1
xk Ak A0 x1 Bk A0 B0 u.
Вводя x [ x1T ,..., xkT ]T – n - вектор состояния ( n k l ) систему можно записать в виде (1.77) с матрицами
A1 A01
A 1
A B
0 0
Ak A01
El
0l
0l
0l
0l
B1 A01B0
0l
, B
, C A01 0l ( k 1) , D A01 B0 .
1
El
B A0 B0
k 1
1
0l
Bk A0 B0
Отметим, что существуют различные способы приведения системы (1.82)
к виду (1.77), которые не всегда приводят к правильному результату.
Пример 1.18. Уравнение
( s2 3s 2) y ( s 1)u
(1.83)
приводится к виду (1.77) с матрицами
3 1
1
,
A
B
1 , C 1 0 .
2
0
Также воспользуемся пакетом MATLAB с помощью следующего Scriptфайла:
s1=tf([1 1],[1 3 2]);
s2=ss(s1);
[A,B,C,D]=ssdata(s2)
98
В результате получим систему с матрицами
3 2
2
,
A
B
0 , C 0.5 0.5 .
1 0
Сравним полученные результаты. Вычислим следующие вспомогательные матрицы:
C 1 0
1 2
,
;
|
U
|
0
N
AB
CA 3 1 , | N | 1 ;
1 2
U B
U B
C 0.5 0.5
2 6
, | U | 4 ; N
AB
, | N | 0 ;
0
2
1
1
CA
Далее будет показано, что матрица U называется матрицей управляемости системы, а матрица N называется матрицей наблюдаемости системы. Для
управляемости и наблюдаемости системы необходимо и достаточно, чтобы
| U | 0 и | N | 0 .
В данном случае для исходного уравнения (1.83) получены две системы с
противоположными свойствами. Проанализируем исходное уравнение.
Решение y(t ) зависит от корней s1 1 , s2 2 характеристического
уравнения s 2 3s 2 0 , следовательно, система наблюдаемая.
Поскольку у изображения Лапласа
Y ( p)
p 1
1
U ( p)
U ( p)
( p 1)( p 2)
p2
сокращается множитель p 1 , то система неуправляемая.
Следовательно, рассмотренный способ приведения системы к виду (1.77)
дает правильный результат, а с помощью пакета MATLAB неверный результат.
Также к неверному результату приводит использование метода, который
рассматривается во многих учебниках по ТАУ (см., например, [5, стр. 92]). Согласно данному методу для одномерной системы с передаточной функцией
m( p ) b0 p m b1 p m1
W ( p)
d ( p ) a0 p n a1 p n1
при m n матрицы системы (1.77) имеют вид:
bm
an
99
0
A
0
an
1
0
0
an 1
0
an 2
С bm
bm1
b0
0
0
0
, B ,
1
a1
1
0
0 , D 0 .
Нетрудно проверить, что такая система приводит к такому же неверному результату как в системе MATLAB.
В системе MATLAB предусмотрена возможность задавать передаточные
функции (матрицы) W с помощью команды tf. При этом для перехода к системе (1.77) можно воспользоваться командой sys1=ss(W). Для обратного перехода используется команда sys2=tf(sys1).
Вопросы для самопроверки
1. Для чего необходим переход от передаточных матриц к уравнениям в пространстве состояний?
2. В чем преимущество и недостаток систем в переменных состояния по сравнению с их представлением передаточными матрицами?
3. В чем причина неверных результатов при переходе от операторного уравнения вход-выход к системе дифференциальных уравнений?
1.5.10. Решение системы дифференциальных уравнений
Рассмотрим способы построения решения системы (1.77).
1) Метод преобразования Лапласа
Перепишем уравнение (1.78), используя свойство обратной матрицы:
pEn A1
1
AT ( p) ,
d ( p)
где d ( p ) | pEn A | – характеристический полином n -го порядка; A( p) n n матрица алгебраических дополнений, элементы aij ( p ) которой определяются
как произведение ( 1)i j на определитель матрицы, полученной из матрицы
100
pEn A , вычеркиванием строки i и столбца j . Причем порядок полиномов
aij ( p ) не превышает значения n 1 .
Тогда получим
X ( p)
1
1
AT ( p) x(0)
AT ( p) BU ( p) .
d ( p)
d ( p)
(1.84)
С помощью обратного преобразования Лапласа по выражению (1.84)
находится оригинал x(t ) .
Также из выражения (1.78) согласно теореме о свертке следует выражение для оригинала
t
x(t ) (t ) x(0) (t ) Bu ( )d ,
(1.85)
0
где (t ) L1
pE A называется переходной матрицей, причем первое
1
n
слагаемое определяет свободной движение, а второе слагаемое вынужденное
движение системы (1.77).
2) Метод разложения в бесконечный ряд
Из выражения (1.85) следует, что решение x(t ) зависит от матрицы (t ) ,
которую можно искать независимо от входного сигнала u (t ) . Поэтому в уравнении (1.77) положим u (t ) 0 . Найдем решение однородного уравнения
x(t ) Ax(t ),
x(t0 ) x0 ,
(1.86)
полагая t t0 t . Решение x(t0 t ) разложим в ряд Тейлора относительно
начального значения x (t0 ) :
x(t ) x(t0 ) x(t0 )t
1
x(t0 )t 2
2!
1 (k )
x (t0 )t k
k!
(1.87)
Учитывая, что x(t0 ) Ax(t0 ) , x(t0 ) Ax(t0 ) A2 x(t0 ) , …, x ( k ) (t0 ) Ak x(t0 ) выражение (1.87) перепишем в виде
x(t ) (t ) x(t0 )
где
(1.88)
101
(t ) En At
1 2 2
1
A t ... Ak t k ... e At ,
2!
k!
(1.89)
т.е. переходная матрица равна матричной экспоненте.
Путем подстановки нетрудно убедиться, что решение (1.88) удовлетворяет уравнению (1.86):
2
k
x(t ) (t ) x(t0 ) A A2t ... Ak t k 1 ... x(t0 )
2!
k!
1
A En At ...
Ak 1t k 1 ... x(t0 ) A(t ) x(t0 ) Ax(t ).
(k 1)!
Отсюда следует первое свойство переходной матрицы:
(t ) A(t ) .
(1.90)
Поскольку выполняется равенство:
x(t ) (t ) x(t0 ) (t t0 ) (t0 ) x(0) (t ) x(0) ,
то, очевидно, что для произвольных начальных условий x (0) выполняется второе свойство
(t ) (t t0 ) (t0 ) .
(1.91)
или
e At e A(t t0 )e At0 .
С помощью формулы (1.91) решение (1.85) можно записать для начальных условий в произвольный момент времени:
t
x(t ) (t ) x(0) (t ) Bu( )d
0
t0
t
0
t0
(t t0 )(t0 ) x(0) (t t0 )(t0 ) Bu( )d (t ) Bu( )d
t0
t
(t t0 ) (t0 ) x(0) (t0 ) Bu( )d (t ) Bu( )d
0
t0
t
(t t0 ) x(t0 ) (t ) Bu( )d .
t0
102
3) Метод преобразования подобия
Из теории матриц известно, что если характеристическое уравнение
d ( p) | pEn A | p n a1 p n1
an 0
имеет различные корни pi , i 1, (собственные значения матрицы A) кратности ni ( n n1 ... n ), то с помощью преобразования M , | M | 0 любую вещественную матрицу A можно привести к блочно-диагональной форме Жордана
[12]:
A MJM 1 diag J j ( pi ) ,
(1.92)
ri
где J j ( pi ) – li li - жордановый блок ( li j ni ) вида
j
j
j 1
pi
0
J j ( pi )
0
1
pi
0
1
0
0
0
0
.
1
pi
Тогда формулу (1.89) с учетом свойства A2 MJM 1MJM 1 MJ 2 M 1
можно записать в виде
1
1
(t ) M En J t J 2t 2 ... J k t k ... M 1 Me J t M 1 .
2!
k!
(1.93)
а) В частном случае, когда li j 1 , J j ( pi ) pi и матрица J является диагональной. Тогда с учетом свойств диагональных матриц матричную экспоненту
p t
e J t можно представить в виде: e J t diag{e i } .
Для данного случая с помощью представления матриц
M [m1
nT
1
1
m2 ] , M
T
nn
формулу (1.93) можно переписать в виде
103
(t ) Me
J t
M
1
n
Qi e pi t .
(1.94)
i 1
где Qi mi niT n n - матрицы. Тогда решение однородной системы (1.86) при
t0 0 запишется в следующей форме
n
n
x(t ) (t ) x(0) Qi e x(0) e pit ci ,
i 1
pit
(1.95)
i 1
где ci Qi x(0) .
б) В общем случае, когда li j 1 , решение x(t ) представляется в виде аналогичном (1.95), содержащем слагаемые с множителями e pit , e pit t , …,
l j 1
e pit t i
/(li j 1)!
В системе MATLAB для вычисления матриц M и J в разложении (1.92),
можно осуществить с помощью команды [M,J]=jordan(A). Для вычисления
матричной экспоненты используется команда expm(A).
Вопросы для самопроверки
1. Какими способами можно найти переходную матрицу?
2. Какими свойствами обладает переходная матрица?
3. Что понимается под свободным и вынужденным движением системы?
4. В чем особенность представления матрицы в форме Жордана?
5. От чего зависит решение однородной системы линейных дифференциальных
уравнений?
1.6. Устойчивость САУ
Рассматриваются два подхода к определению устойчивости САУ.
1) Пусть заданное или невозмущенное движение системы описывается
уравнением
x* (t ) F ( x* (t ), u* (t )) , x* (t0 ) x0* ,
(1.96)
где x* n - вектор состояния, u* m - вектор управляющих воздействий, F () –
104
нелинейная вектор-функция, удовлетворяющая условиям существование и
единственности решения системы (1.96).
Предположим, что в момент времени t t0 из-за внешних возмущений
изменилось начальное условие, которое приняло значение x0 x0* x0 . При
этом возмущенное движение системы при t t0 отклоняется от невозмущенного движения x* (t ) и описывается уравнением
x(t ) F ( x(t ), u* (t )) , x0 x0* x0 .
(1.97)
Очевидно, что для нормальной работы системы необходимо, чтобы после
снятия возмущающих воздействий возмущенное движение системы стремилось
к невозмущенному движению при t . Данное свойство системы называют
устойчивостью системы или устойчивостью невозмущенного движения.
В частном случае, если x* (t ) 0 , система (1.96) при u* (t ) const находится в состоянии равновесия x* (t ) x* (t0 ) , которое определяется из уравнения
статики
F ( x* , u * ) 0 .
(1.98)
В силу нелинейности уравнения (1.97) может существовать множество состояний равновесия. При этом каждое положение равновесия может быть устойчивым, нейтральным и неустойчивым. Примером может служить движение физического маятника при наличии сил трения, представленного на рис. 1.57. В зависимости от положения точки С центра масс маятника его положение равновесия является устойчивым (а), нейтральным (б), неустойчивым (в).
Рис. 1.57
105
2) Другое определение устойчивости связано с реакцией системы на изменение управляющего воздействия u * . Пусть в момент времени t t0 управляющее воздействие приняло значение u (t ) u* (t ) u (t ) , где u (t ) – произвольное ограниченное воздействие, удовлетворяющее условию
|| u (t ) || u12 (t )
um2 (t ) umax .
При этом возмущенное движение системы, отклоняющееся от невозмущенного
движения x* (t ) , описывается уравнением
x(t ) F ( x(t ), u* (t ) u (t )) , x(t0 ) x0 .
(1.99)
Если отклонение x(t ) x(t ) x* (t ) при t0 t является ограниченным, т.е.
выполняется условие
|| x(t ) || x12 (t )
xm2 (t ) xmax ,
(1.100)
то система (1.96) называется устойчивой по входу.
Устойчивость по входу связана с понятием устойчивости невозмущенного движения.
1.6.1. Определение устойчивости по Ляпунову
Рассмотрим первый подход к определению устойчивости невозмущенного движения системы (1.96), полагая u * (t ) известным вектором. Для этого запишем уравнение (1.97) в отклонениях от невозмущенного движения системы
(1.96) полагая x(t ) x* (t ) x(t ) . Тогда вычитая из уравнения (1.97) уравнение
(1.96) получим
x(t ) F ( x* (t ) x(t ), u* (t )) F ( x* (t ), u* (t )) f ( x(t ), t ) .
Таким образом, возмущенное движение системы в отклонениях от невозмущенного движения описывается нестационарной системой
x(t ) f (x(t ), t ) , x(t0 ) x(t0 ) x* (t0 ) ,
(1.101)
где f (x(t ), t ) f (0, t ) 0 . При этом для системы (1.101) невозмущенным движением является решение x(t ) 0 .
106
Определение 1. Невозмущенное движение x* (t ) системы (1.96) (или
x(t ) 0 системы (1.101)) называется устойчивым по Ляпунову, если для любо-
го сколь угодно малого 0 найдется ( ) 0 такое, что при начальных условиях
|| x(t0 ) |||| x(t0 ) x* (t0 ) ||
выполняется неравенство || x(t ) |||| x(t ) x* (t ) || при t t0 .
В противном случае невозмущенное движение называется неустойчивым
по Ляпунову.
Определение 2. Если исходная система (1.96) (или (1.101)) устойчива по
Ляпунову и выполняется также условие lim x(t ) 0 , то невозмущенное двиt
жение x* (t ) системы (1.96) (или x(t ) 0 системы (1.101)) асимптотически
устойчиво.
Если исходная система асимптотически устойчива для любых начальных
отклонений, то невозмущенное движение устойчиво в целом.
Приведем геометрическую интерпретацию определения устойчивости по
Ляпунову для случая n 2 . На рис. 1.58 невозмущенное движение x* (t ) является осью трубки с внутренним и внешним радиусами. При этом возмущенное движение x(t ) , соответствующее кривой 1, является устойчивым по
Ляпунову, а кривой 2 – асимптотически устойчивым. На рис. 1.59 приведены
соответствующие возмущенные движения x(t ) в отклонениях от невозмущенного x(t ) 0 .
Рис. 1.58
Рис. 1.59
107
Примером устойчивой системы по Ляпунову является математический
маятник, приведенный на рис. 1.60. Здесь начальное угловое положение маятника | (t0 ) | . Поэтому при свободных колебаниях маятника
будет выполняться условие | (t ) | , т.е. движение маятника устойчиво по Ляпунову. Если движению маятника препятствует сопротивление среды, то его колебания будут затухающими и тем самым движение является асимптотически устойчивым.
В дальнейшем будем рассматривать систему (1.101) при x* (t ) const ,
u* (t ) const в отклонениях от невозмущенного движения, опуская для просто-
ты символ :
x f ( x) , x(t0 ) x0 ,
(1.102)
где f (0) 0 . Разлагая функции fi ( x) , i 1, n в ряд Тейлора, получим
fi ( x)
j 1 x j
n
fi ( x)
x j i ( x) ,
x 0
где i ( x ) – слагаемые содержащие члены выше первого порядка малости. Тогда
уравнение (1.102) можно переписать в виде:
x Ax ( x) , x(t0 ) x0 ,
(1.103)
где постоянная матрица A определяется по формуле
f1 ( x)
x
1
f ( x)
A
x x0
f n ( x)
x1
f1 ( x)
xn
.
f n ( x)
xn x0
Вопросы для самопроверки
1. Что понимается под устойчивостью системы?
2. В чем отличие устойчивости невозмущенного движения и устойчивости по
входу?
108
3. Какой геометрический смысл имеет устойчивость по Ляпунову?
4. Почему уравнение возмущенного движения в отклонениях от невозмущенного движения является нестационарным?
5. В чем отличие устойчивости по Ляпунову от асимптотической устойчивости?
1.6.2. Устойчивость линейных систем
При малых отклонениях вектора x функцией ( x) можно пренебречь и
тогда из системы (1.103) следует линейная система:
x Ax , x(t0 ) x0 .
(1.104)
Следует отметить, что возможны случаи, когда в системе (1.103) функция
( x) 0 , т.е. система является линейной, при этом отклонении вектора x могут
быть произвольными.
Для определения устойчивости системы (1.104) по Ляпунову необходимо
проанализировать поведение нормы вектора || x(t ) || , где решение x(t ) при
t0 0 в случае различных корней определяется по формуле (1.95) и удовлетво-
ряет неравенству
n
|| x(t ) || | e pit | || ci || .
i 1
Здесь комплексному корню pi соответствует комплексный вектор ci , норма которого равна корню квадратному из суммы квадратов модулей координат вектора ci .
Таким образом, поведение нормы вектора || x(t ) || зависит от функций
| e pit | , и в случае кратных корней pi – может зависеть от функций | e pit | , | e pit t | ,
…, | e pit t k | .
Рассмотрим различные случаи распределения корней pi i j i характеристического уравнения
d ( p) | pEn A | p n a1 p n1
an 0
на комплексной плоскости, которым соответствует выражение
(1.105)
109
e pit e(i ji )t eit e jit .
Отсюда с учетом равенства | e jit || cos it j sin it | 1 получим
| e pit || eit | | e jit || eit | .
1. Корни с отрицательной вещественной частью. При значении i 0
функция eit 0 , поэтому функция | e pit | 0 .
t
t
Несложно также показать, что функция | e pit t k | 0 для любого конечноt
го значения k .
2. Корни с положительной вещественной частью. При значении i 0
функция eit и, следовательно, функция | e pit | .
t
t
3. Корни с нулевой вещественной частью. При значении i 0 функция
e 0t 1 , и, следовательно, | e
pit
| 1 . При этом функция | e pit t k | .
t
0 0
Пример 1.19 Пусть система (1.104) имеет матрицу A
. Характе0 0
ристическое уравнение
p 0
d ( p ) | pEn A |
p2 0 ,
0 p
имеет кратные корни p1,2 0 . Тогда решение x(t ) можно записать с помощью
формулы (1.95) в виде
x(t ) E2 x(t0 ) x(t0 ) ,
т.е. x1 (t ) x1 (t0 ) , x2 (t ) x2 (t0 ) (рис. 1.61).
Таким образом, система устойчивая по Ляпунову.
0 1
Пример 1.20. Пусть у системы (9) матрица A
, т.е. представлена
0
0
в виде блока Жордана. Характеристическое уравнение
p
d ( p ) | pEn A |
0
1
p2 0 ,
p
110
имеет кратные корни p1,2 0 . Тогда решение x(t ) можно записать с помощью
формулы
x(t ) E2 A(t t0 ) x(t0 ) ,
т.е. x1 (t ) x1 (t0 ) (t t0 ) x2 (t0 ) , x2 (t ) x2 (t0 ) (рис. 1.62).
Рис. 1.61
Рис. 1.62
Таким образом, система неустойчивая по Ляпунову.
Отметим, что система примера 1.19 в отличие от системы примера 1.20 не
может быть приведена к дифференциальному уравнению 2-го порядка. Это отражается на устойчивости данных систем.
С учетом сказанного выше следует, корневой критерий устойчивости линейной системы:
Для асимптотической устойчивости линейной системы необходимо
и достаточно, чтобы все корни характеристического уравнения системы
имели отрицательные вещественные части, т.е. располагались в левой
комплексной полуплоскости. Если имеется хотя бы один корень с положительной вещественной частью, то система неустойчивая. Если имеются
корни, расположенные на мнимой оси, то устойчивость системы по Ляпунову зависит от структуры матрицы системы, то есть наличия жордановых блоков для данных корней.
При отсутствии жордановых блоков для корней с нулевой вещественной
частью и остальных корней, расположенных в левой полуплоскости, система
устойчива по Ляпунову. В этом случае также говорят, что система находится на
границе устойчивости. При этом в случае нулевых корней система находится
111
на границе апериодической устойчивости, в случае чисто мнимых корней – на
границе колебательной устойчивости.
В дальнейшем для краткости асимптотически устойчивую линейную систему будем называть просто устойчивой. При этом корни характеристического
уравнения системы, имеющие отрицательные вещественные части, т.е. расположенные в левой комплексной полуплоскости, будем называть левыми, а расположенные в правой комплексной полуплоскости – правыми.
Если исходная система имеет вид
x Ax Bu* , x(t0 ) x0 ,
(1.106)
то для исследования устойчивости запишем уравнение системы в отклонении
от установившегося режима xуст , который будем считать невозмущенным движением, удовлетворяющим уравнению
xуст Axуст Bu* .
(1.107)
Из уравнений (1.106), (1.107) следует уравнение в отклонении
x x xуст от установившегося режима
x Ax , x(t0 ) x0 xуст .
Отсюда следует вывод:
Устойчивость линейной системы не зависит от вида входного воздействия, а определяется корнями ее характеристического уравнения.
Для выхода y cT x системы (1.106) согласно (1.84) соответствует зависимость «вход-выход»
Y ( p) W ( p)U * ( p)
1
с передаточной матрицей W ( p) cT pEn A B
1 T T
c A ( p) B , у элементов
d ( p)
которой знаменателем является характеристический полином d ( p ) . Поэтому
справедливо следующее правило:
Для анализа устойчивости одномерных систем, представленных с помощью передаточных функций, необходимо приравнять к нулю полином ее
112
знаменателя и определить его корни.
Установим связь устойчивости линейной системы по входу с устойчивостью невозмущенного движения. Для этого рассмотрим систему
x Ax Bu , x(0) x0 ,
(1.108)
полагая u u * u , u * 0 , | u j | u j , j 1, m , т.е. || u || . Решение системы (1.108) имеет вид
t
x(t ) e x(0) e A(t ) Bu ( )d ,
At
0
для которого справедливо неравенство
n
|| x(t ) || | e
i 1
n pi (t )
| || ci || | e
| || ci || d ,
0 i 1
t
pit
(1.109)
где ci – вектор, зависящий от значений u j . Отсюда следует, что если корни
pi , i 1, n левые, то при t интеграл в правой части неравенства (1.109)
ограничен и, следовательно, || x(t ) || .
Таким образом, из условия устойчивости невозмущенного движения следует устойчивость системы по входу. Справедливо и обратное утверждение.
Вопросы для самопроверки
1. От чего зависит асимптотическая устойчивость линейной системы?
2. В каком случае система находится на границе устойчивости?
3. В каком случае система является неустойчивой?
4. Почему из асимптотической устойчивости линейной системы следует устойчивость системы по входу?
5. Можно ли утверждать, что если реакция системы на единичный скачок ограничена, то система является асимптотически устойчивой?
1.6.3. Теоремы Ляпунова об устойчивости по линейному приближению
Возвращаясь к исходной нелинейной системе (1.103) возникает вопрос об
ее устойчивости в зависимости от устойчивости ее линейного приближения –
113
системы (1.104). Впервые этот вопрос был поставлен и решен А.М.Ляпуновым
в 1892 году и сформулирован в виде следующих теорем.
Теорема 1. Если все корни характеристического уравнения линеаризованной системы (1.104) левые, то невозмущенное движение нелинейной системы (1.103) асимптотически устойчиво.
Теорема 2. Если среди корней характеристического уравнения линеаризованной системы (1.104) имеется правый корень, то невозмущенное движение
нелинейной системы (1.103) неустойчиво.
Теорема 3. Если характеристическое уравнения линеаризованной системы (1.104) имеет левые корни и корни, расположенные на мнимой оси (критический случай), то в этом случае нельзя судить об устойчивости нелинейной
системы (1.103) по линеаризованной системе (1.104).
Следует отметить, что устойчивость системы по тереме 1 определяется в
малой окрестности от положения равновесия и в общем случае устойчивость
нелинейной системы зависит от начальных условий.
Для исследования устойчивости линейных систем с помощью вычислительного пакета MATLAB коэффициенты характеристического уравнения системы (1.105) начиная со старшей степени полинома могут быть найдены с помощью команды p=poly(A). Корни характеристического уравнения определяются с помощью команды roots(p) или команды eig(A).
Пример 1.21. Определить устойчивость системы с матрицей
0 1 0
A 0 0 1 .
3 2 1
С помощью команд
A=[0 1 0;0 0 1;-3 -2 -1];a=poly(A),p=roots(a)
получим
a =
1.0000
1.0000
p =
0.1378 + 1.5273i
0.1378 - 1.5273i
-1.2757
2.0000
3.0000
114
Поскольку комплексно-сопряженные корни имеют положительную вещественную часть, то система неустойчива.
Вопросы для самопроверки
1. От чего зависит устойчивость нелинейной системы, имеющей линейное приближение?
2. В чем отличие условий устойчивости линейных и нелинейных систем?
3. В каком случае нелинейная система будет устойчивой по входу?
1.6.4. Алгебраические критерии устойчивости линейных систем
В инженерной практике не всегда удобно проверять устойчивость линейной системы по корням характеристического уравнения. Это связано в первую
очередь с необходимостью использования ЦВМ, поскольку для алгебраических
уравнений выше 3-его порядка требуется использование численных методов.
Кроме того, часто требуется определять область устойчивости системы по параметрам. При этом вычисление корней характеристического уравнения для
множества значений параметров является нерациональным. В связи с этим возникает задача определения устойчивости системы без вычисления корней, то
есть определения условий, при которых корни характеристического уравнения
левые. Методы решающие указанную задачу называются критериями устойчивости. В зависимости от метода решения задачи критериями устойчивости делятся на алгебраические и частотные критерии. Алгебраические критерии позволяют судить об устойчивости системы по коэффициентам характеристического уравнения системы, а частотные – по виду соответствующих частотных
характеристик.
Пусть задано характеристическое уравнение линейной системы
d ( p) | pEn A | a0 p n a1 p n1
an 0 , a0 1 .
(1.110)
1.6.4.1. Критерий Стодола
Утверждение. Для устойчивости системы с характеристическим уравнением (1.110) необходимо, чтобы коэффициенты ai 0 , i 0, n .
115
Доказательство. В соответствии с теоремой Безу уравнение (1.110) можно
представить в виде произведения множителей, содержащих корни pi , i 1, n :
d ( p ) a0 ( p p1 )( p p2 )
( p pn ) 0 .
(1.111)
Пусть все корни левые, причем для вещественных корней коэффициенты
pi 0 , а для комплексно-сопряженных корней pi i j i ,
pi 1 pi i j i множители
( p pi )( p pi 1 ) p 2 ( pi pi 1 ) p pi pi 1 p 2 2i p i2 i2
имеют полиномы 2-го порядка с положительными коэффициентами, поскольку
i 0 . Тем самым, если раскрыть полином (1.111) с положительными коэф-
фициентами и привести к виду уравнения (1.110), то его коэффициенты также
будут положительными. Отсюда следует критерий Стодола.
Очевидно, что возможны случаи, когда некоторые коэффициенты уравнения (1.111) отрицательные, а коэффициенты уравнения (1.110) положительные, т.е. критерий Стодола является только необходимым. Однако, если в уравнении (1.110) хотя бы один коэффициент ai 0 , то система неустойчива. Это
условие является достаточным для неустойчивости системы.
1.6.4.2. Критерий Гурвица
Утверждение. Для устойчивости системы с характеристическим уравнением (1.110) необходимо и достаточно, чтобы матрица Гурвица
a1
a
0
Ã0
0
a3
a2
a1
0
a5
a4
a3
0
0
0
an
имела положительные главные диагональные миноры:
1 a1 0 , 2
a1
a0
a3
0 , …, n | Ã | an n1 0 .
a2
Рассмотрим частные случаи:
116
а) при n 2 условие устойчивости определяется неравенствами
1 a1 0 , 2
a1
a0
0
a1a2 0 ,
a2
т.е. a0 1 0 , a1 0 , a2 0 , что совпадает с условием критерия Стодола, который в этом случае дает необходимое и достаточное условие устойчивости.
б) при n 3 условие устойчивости определяется неравенствами
1 a1 0 , 2
a1
a0
a3
a1a2 a0 a3 0 , 3 a3 2 0 ,
a2
из которых следует, что ai 0 , i 1,3 и должно выполняться условие a1a2 a0 a3 .
Таким образом, из критерия Гурвица следуют необходимые условия
устойчивости Стодола.
Пример 1.22. Пусть структурная схема САУ имеет
вид рис. 1.63, где
W ( p)
k
.
p(T1 p 1)(T2 p 1)
Требуется определить условие устойчивости замкнутой системы по коэффициенту усиления k .
Для решения задачи составим характеристическое уравнение замкнутой
системы, полагая 1 W ( p) 0 . Отсюда получим
D( p) p(T1 p 1)(T2 p 1) k 0
или
D( p) a0 p3 a1 p 2 a2 p a3 0 ,
где a0 T1T2 0 , a1 T1 T2 0 , a2 1 , a3 k 0 . Тогда условие устойчивости
замкнутой системы определяется неравенством a1a2 a0 a3 или с учетом подстановки
0k
T1 T2
.
T1T2
(1.112)
Критерий Гурвица удобно использовать для систем невысокого порядка
( n 6 ), поскольку с ростом порядка увеличивается объем аналитических вычислений. Если требуется определить область устойчивости по одному пара-
117
метру, то для систем высокого порядка можно воспользоваться символьными
вычислениями пакета MATLAB.
Пример 1.23. Требуется определить область устойчивости системы
0
x 0
k
1 0
0 1 x
1 2
по коэффициенту k с помощью символьных вычислений.
Для решения задачи воспользуемся следующим Script-файлом:
syms p k % символьные переменные
n=3; A=[0 1 0;0 0 1;-k -1 -2];
d=poly(A,'p')% определение характеристического уравнения
% вектор коэффициентов характеристического уравнения
aa=coeffs(d,p);n1=n+1;for i=1:n1; a(i)=aa(n1-i+1);end
% второй главный диагональный минор матрицы Грвица
delta2=[a(2) a(4);a(1) a(3)]
vpa(det(delta2),6)% выражение минора матрицы Гурвица
В результате выполнения данной программы на печать выводятся выражение характеристического уравнения, второй главный диагональный минор
матрицы Гурвица и его выражение:
d =
p^3+2*p^2+p+k
delta2 =
[ 2, k]
[ 1, 1]
detG =
2.-1.*k
Таким образом, условие устойчивости по коэффициенту k определяется
неравенством 0 k 2 .
Вопросы для самопроверки
1. Что понимается под критериями устойчивости системы?
2. В чем состоит достаточность критерия Стодола?
118
3. В чем отличие критерия Гурвица от критерия Стодола?
4. Когда критерий Стодола является необходимы и достаточным?
5. Чем вызваны ограничения использования критерия Гурвица?
1.6.5. Частотные критерии устойчивости линейных систем
При значении порядка системы n 6 использование критерия Гурвица
связано с решением сложных неравенств. В этом случае для определения области устойчивости более эффективным является частотный метод D - разбиения
Неймарка, который в отличие от алгебраического метода является численным
методом.
1.6.5.1. Метод D-разбиения построения области устойчивости
Сущность метода D – разбиения, предложенного Ю.И. Неймарком, по
одному параметру заключается в следующем. Пусть характеристическое уравнение системы имеет вид:
D( p, k ) d ( p) k m( p) 0 ,
(1.113)
где k неизвестный параметр, по которому требуется определить область устойчивости системы. Из уравнения (1.113) запишем выражение для параметра k в
операторной форме:
k ( p)
d ( p)
.
m( p )
При подстановки p j для значений определяется условие на комплексный параметр k ( j ) , при котором замкнутая система имеет корни на мнимой оси. Построенная кривая D - разбиения k ( j ) X ( ) jY ( ) при
является отображением мнимой оси плоскости корней. При
этом, если нанести штриховку на мнимой оси рис. 1.64, то при движении по D кривой k ( j ) , штриховка также будет располагаться слева. Тем самым D - кривая разбивает комплексную плоскость на области с различным содержанием устойчивых корней. При переходе из одной смежной области в дру-
119
гую через кривую D - разбиения один вещественный или пара комплексных сопряженных корней переходит через мнимую ось. Область, содержащая
наибольшее число левых корней называется претендентом на устойчивую область.
Если суммарное число переходов корней из области из области с
наименьшим числом в область с наибольшим числом левых корней равно n , то
область претендент будет областью устойчивости. Если число таких переходов
меньше n , то найденную область претендент необходимо проверить на устойчивость для любого фиксированного вещественного значения параметра k из
данной области с помощью какого-нибудь критерия устойчивости. Здесь можно
воспользоваться, например, критерием Гурвица с использованием численных
методов вычисления главных диагональных миноров.
Построение области устойчивости по параметру k методом D - разбиения
можно проводить в системе MATLAB с помощью функции nyquist для операторного выражения параметра k ( p ) .
Пример 1.24. Для примера 1.22 требуется построить кривую D-разбиения
при значении параметров T1 1 с, T2 0,1с.
Для решения задачи воспользуемся командой
T1=1; T2=0.1; nyquist(-tf([T1*T2 T1+T2 1 0],[1]))
На рис. 1.65 представлен отредактированный график кривой Dразбиения, разделяющей комплексную плоскость на три области. При этом область 1 является областью претендентом на устойчивость со значением параметра k , удовлетворяющего неравенству 0 k 11 , что совпадает с условием
устойчивости по критерию Гурвица (3).
120
Рис. 1.65
Метод D-разбиения также применяется для определения областей устойчивости по двум параметрам [1].
Вопросы для самопроверки
1. Что означает график D-кривой на комплексной плоскости?
2. Каким образом наносится штриховка на D-кривой?
3. Как определяется область претендент на устойчивость в методе D-разбиения?
4. Что означает переход через D-кривую из области претендента на устойчивость в соседнюю область?
5. Каким образом делается вывод об устойчивости области претендента?
1.6.5.2. Критерий устойчивости Михайлова
Пусть задано характеристическое уравнение
D( p) a0 p n a1 p n1
an 0 , a0 1 .
Рассмотрим свойства частотной характеристики D( j ) , которая называется годографом Михайлова, для значений 0 .
Учитывая, что характеристический полином можно представить в виде
D( p ) a0 ( p p1 )( p p2 )
( p pn ) ,
где pi , i 1, n – корни характеристического уравнения, то после подстановки
p j получим:
121
D( j ) | D( j ) | e
j arg D ( j )
n
n
( j pi ) | j pi | e j arg( j pi ) ,
i 1
(1.114)
i 1
где
n
| D( j ) | | j pi | ,
(1.115)
i 1
n
arg D( j ) arg( j pi ) .
(1.116)
i 1
Здесь принято обозначение arg() – аргумент от комплексного значения, равный
значению фазы. На рис. 3 для удобства комплексные значения представлены в
виде векторов.
1) Рассмотрим случай левых корней pi (рис. 1.66 а), где i j pi .
Найдем диапазон изменения (приращение) аргумента для функции i j pi
при изменении 0 . Очевидно, что вектор i (т. А) повернется на угол
/2 .
Рис. 1.66
Для комплексно-сопряженного значения pi i j i вектор i (т. В) повернется на угол / 2 . Тогда приращение аргумента для функции
( j pi )( j pi ) будет равно сумме приращений аргумента для каждого мно-
жителя:
arg[( j pi )( j pi )] / 2 / 2 2 / 2 .
0
Для вещественного корня ( i 0 , 0 ) получим приращение аргумента
122
arg[ j pi ] / 2 .
0
2) Рассмотрим случай правых корней pi (рис. 1.66 б). Очевидно, что приращения аргумента для правых корней будет отличаться только знаком.
3) Рассмотрим случай корней pi расположенных на мнимой оси (рис.
1.66в). Очевидно, что приращения аргумента здесь будет равно нулю.
Таким образом, левые корни характеристического уравнения (1.110) дают
положительное, а правые отрицательное приращение аргумента, а корни расположенные на мнимой оси не дают приращения аргумента.
На основе проведенного анализа с учетом формулы (1.116) можно сформулировать следующее свойство.
Свойство. Если характеристическое уравнение (1.110) имеет m правых и
n m левых корней, то приращение аргумента для годографа Михайлова
(1.114) будет равно:
arg D( j ) (n m) / 2 m / 2 (n 2m) / 2 .
0
(1.117)
Отсюда следует, что если построить годограф Михайлова D( j ) , который не проходит через начало координат, и определить из графика приращение
его аргумента, равное k / 2 , то из равенства k / 2 (n 2m) / 2 найдем
количество правых корней по формуле
m (n k ) / 2 .
(1.118)
Если приращение аргумента arg D( j ) n / 2 , то m 0 и, следова0
тельно, система устойчива. При этом годограф Михайлова вращается строго
против часовой стрелки.
При определении устойчивости системы по приращению аргумента годографа D( j ) необходимо исключать случаи расположения корней на мнимой
оси (на границе устойчивости). В этих случаях годограф Михайлова имеет характерный вид.
1. Если имеется пара чисто мнимых корней p1,2 j i , то согласно фор-
123
муле (1.115) при i значение | D( j ) | 0 , т.е. годограф Михайлова проходит через начало координат.
2. Если имеется нулевой вещественный корень p1 0 , то при 0 значение | D( j ) | 0 , т.е. годограф Михайлова начинается из начала координат.
Отметим, что для устойчивости системы в силу критерия Стодола все коэффициенты характеристического уравнения должны быть положительными,
то есть у полинома D ( p ) значение коэффициента an 0 и годограф Михайлова
при 0 должен начинаться на вещественной положительной полуоси.
С учетом указанных свойств теперь можно дать общую геометрическую
интерпретацию частотного критерия устойчивости Михайлова:
Для устойчивости системы с характеристическим полиномом D ( p )
необходимо и достаточно, чтобы годограф Михайлова D( j ) при изменении
0 начинался на вещественной положительной полуоси, строго вра-
щался против часовой стрелки, последовательно обходя n квадрантов (не
проходя через начало координат), и уходил в бесконечность в n -ом квадранте, где n – порядок характеристического полинома.
Для построения годографа Михайлова необходимо:
1) представить D( j ) X ( ) jY ( ) ;
2) найти точки пересечения с вещественной осью, полагая Y ( ) 0 и
определяя соответствующие положительные значения 1 , 2 , … в порядке
возрастания;
3) найти точки пересечения с мнимой осью, полагая X ( ) 0 и определяя соответствующие положительные значения 1 , 2 , … в порядке возрастания;
4) определить квадрант, в котором годограф уходит в бесконечность по
значениям X () , Y () .
По полученным точкам пересечения с осями координат в порядке возрастания частоты можно построить годограф Михайлова.
124
Из геометрической интерпретацию критерия Михайлова следует, что для
устойчивости системы необходимо и достаточно, чтобы пересечение осей
X ( ) , Y ( ) осуществлялось в последовательности 1 1 2 2 ... и го-
дограф Михайлова уходил в бесконечность в n -ом квадранте.
При нарушении хотя бы одного свойства в формулировках критерия
устойчивости свидетельствует о неустойчивости системы.
Построение годографа Михайлова можно проводить в системе MATLAB
с помощью функции nyquist для полинома D ( p ) .
Пример 1.25. Для примера 1.24 построить годографы Михайлова при
значениях k 0 , k 5 , k 11 , k 15 и сделать выводы об устойчивости системы.
Для решения задачи воспользуемся Script-файлом:
T1=1;T2=0.1;
k=0;[u,v,w]=nyquist((tf([T1*T2 T1+T2 1 k],[1])),{1e-8,10});
plot(squeeze(u),squeeze(v));hold on
k=5;[u,v,w]=nyquist((tf([T1*T2 T1+T2 1 k],[1])),{1e-8,10});
plot(squeeze(u),squeeze(v));
k=11;[u,v,w]=nyquist((tf([T1*T2 T1+T2 1 k],[1])),{1e-8,10});
plot(squeeze(u),squeeze(v));
k=15;[u,v,w]=nyquist((tf([T1*T2 T1+T2 1 k],[1])),{1e-8,10});
plot(squeeze(u),squeeze(v));grid
На рис. 1.67 представлены отредактированные графики годографов Михайлова: годограф 1 ( k 0 ) начинается из начала координат и соответствует
границе апериодической устойчивости системы; годограф 2 ( k 5 ) последовательно обходит три квадранта, что свидетельствует об устойчивости системы;
годограф 3 ( k 11 ) проходит через начало координат, тем самым система находится на границе колебательной устойчивости; годограф 4 ( k 15 ) соответствует неустойчивой системе, при этом годограф D( j ) поворачивается на
угол / 2 , то есть в формуле (1.118) значение k 1. Следовательно, полином
D ( p ) имеет m (3 1) / 2 2 правых корня.
С помощью команд
k=5;[u,v,w]=nyquist((tf([T1*T2 T1+T2 1 k],[1])),{1e-8,5});
figure(2);plot(w,squeeze(u),w,squeeze(v));grid
проводится построение вещественной X ( ) и мнимой Y ( ) характеристики
125
для устойчивой системы при k 5 (рис. 1.68), для которой выполняется условие чередования корней: 1 1 2 .
Рис. 1.67
Рис. 1.68
Пример 1.26. Для примера 122 найти условия устойчивости замкнутой
системы с помощью критерия Михайлова.
Запишем характеристическое уравнение замкнутой системы:
D( p) a0 p3 a1 p 2 a2 p a3 0 ,
где a0 T1T2 0 , a1 T1 T2 0 , a2 1 , a3 k 0 .
Тогда при p j получим
D( j ) a0 ( j )3 a1 ( j ) 2 a2 ( j ) a3 X ( ) jY ( )
где X ( ) a3 a1 2 , Y ( ) a2 a0 3 . Отсюда следует, что при 0 годограф D( j 0) a3 начинается на вещественной оси и при годограф D( j)
уходит в бесконечность в 3-ем квадранте, при этом стремится к углу
126
a2 a0 2
Y ( )
lim arctg
lim arctg
X ( )
a3 a1 2
lim arctg a
.
a1 2
0
Найдем точки пересечения с осью X ( ) , полагая Y ( ) 0 , то есть из
уравнения
Y ( ) a2 a0 3 0 ,
которое имеет не отрицательные корни 1 0 , 2 a2 / a0 .
Найдем точки пересечения с осью Y ( ) , полагая X ( ) 0 , то есть из
уравнения
X ( ) a3 a1 2 0 ,
которое имеет положительный корень 1 a3 / a1 .
Для устойчивости корней полинома D ( p ) должно выполняться условие
1 1 2 ,
из которого следует неравенство
0 a3 / a1 a2 / a0 ,
или
a3 / a1 a2 / a0 ,
что равносильно условию устойчивости Гурвица: a1a2 a0 a3 .
Вопросы для самопроверки
1. Какое приращение аргумента имеет годограф Михайлова при наличии корней, расположенных на мнимой оси?
2. Какой вид должен иметь годограф Михайлова, чтобы система была устойчивой, на границе колебательной и апериодической устойчивости?
3. Как определить число правых корней у характеристического уравнения системы?
4. Почему для устойчивости системы годограф Михайлова должен начинаться
на вещественной положительной полуоси?
5. Почему годограф Михайлова устойчивой системы вращается строго против
часовой стрелки?
127
1.6.5.3. Критерий устойчивости Найквиста
В отличие от критерия Михайлова частотный критерий устойчивости
Найквиста позволяет судить об устойчивости замкнутой системы по АФЧХ
разомкнутой системы, которая может быть построена аналитически или экспериментально.
Рассмотрим структурную схему замкнутой системы, представленную на
рис. 1.69, которую можно представить в виде рис. 1.70. Тем самым, замкнутую
одномерную систему всегда можно представить в виде рис. 1.71, где передаточная функция разомкнутой системы W ( p) W1 ( p)W2 ( p) охвачена отрицательной единичной обратной связью. Далее будем рассматривать такую систему с передаточной функцией W ( p) m( p) / d ( p) , у которой порядок числителя
m не превышает порядка знаменателя n , что соответствует условию физиче-
ской реализуемости.
Рис. 1.69
Рис. 1.70
Рис. 1.71
Для структурной схемы рис. 1.71 справедливо выражение изображения
выхода
Y ( p)
W ( p)
G ( p) ,
1 W ( p)
из которого следует уравнение свободного движения системы при G( p) 0 :
1 W ( p) Y ( p) 0 .
Характеристическое уравнение замкнутой системы определяется из уравнения
1 W ( p) 0 .
Введем вспомогательную функцию
F ( p) 1 W ( p)
D( p )
,
d ( p)
(1.119)
128
где d ( p) 0 – характеристическое уравнение разомкнутой системы n -го порядка, D( p) d ( p) m( p) 0 – характеристическое уравнение замкнутой системы n -го порядка.
1. Рассмотрим случай, когда характеристическое уравнение разомкнутой
системы d ( p) 0 имеет m правых и n m левых корней, а характеристическое
уравнение замкнутой системы D( p) 0 имеет l правых и n l левых корней.
Полагая p j , можно записать
F ( j ) | F ( j ) | e
j arg F ( j )
| D( j ) | e j arg D ( j )
.
| d ( j ) | e j arg d ( j )
Отсюда следует, что
arg F ( j ) arg D( j ) arg d ( j )
Тогда найдем приращение аргумента функции F ( j ) при изменении
0 :
arg F ( j ) arg D( j ) arg d ( j )
0
0
0
(n 2l ) / 2 (n 2m) / 2 2 (m l ) / 2.
(1.120)
Для устойчивости замкнутой системы необходимо и достаточно, чтобы
l 0 и тем самым, годограф F ( j ) при изменении 0 должен охваты-
вать начало координат в положительном направлении m / 2 раз.
Данное условие устойчивости можно переформулировать для АФЧХ
разомкнутой системы W ( j ) . На рис. 1.72 представлен годограф F ( j ) , вектор
Рис. 1.72
Рис. 1.73
129
которого вращается относительно начала координат. На рис. 1.73 соответственно представлен годограф W ( j ) F ( j ) 1 , вектор которого вращается относительно начала координат, а вектор F ( j ) вращается относительно точки
(1, j 0) .
Тем самым, можно сформулировать критерий Найквиста:
Для устойчивости замкнутой системы необходимо и достаточно, чтобы
АФЧХ разомкнутой системы W ( j ) при изменении 0 охватывал
точку (1, j 0) в положительном направлении m / 2 раз, где m – число правых
корней характеристического уравнения разомкнутой системы.
Из рис. 1.73 следует, что АФЧХ W ( j ) один раз охватывает точку
(1, j 0) в отрицательном направлении, т.е. 1 m / 2 . Тем самым замкнутая си-
стема неустойчива при любом m .
2. Рассмотрим случай, когда характеристическое уравнение разомкнутой
системы d ( p) 0 имеет корни, расположенные на мнимой оси. Это означает,
что полином d ( p ) , согласно теореме Безу, будет содержать множители вида p ,
p 2 *2 , которые приводят к скачкообразному изменению фазы АФЧХ W ( j )
(см. рис. 1.24). Другими словами передаточная функция W ( p) содержит интегрирующие и консервативные звенья. Для использования критерия устойчивости в полиноме d ( p ) заменим указанные множители приближенными множителями p , p 2 p *2 , где 0 – сколь угодно малое значение. Иначе говоря, корни, расположенные на мнимой оси сдвинули в левую полуплоскость
на бесконечно малое значение и тем самым пришли к случаю левых и правых
корней. При этом АФЧХ приближенной передаточной функции W ( j ) начинается на вещественной оси, изменение фазы происходит непрерывно с бесконечно большим значением модуля | W ( j ) | в окрестности точек 0 и * . К
построенной АФЧХ W ( j ) можно применить критерий Найквиста, полагая
0.
130
Таким образом, для использования критерия Найквиста в рассматриваемом случае необходимо построить АФЧХ W ( j ) и места разрывов ее характеристики по часовой стрелке (отрицательное приращение фазы) дополнить дугами бесконечно большого радиуса.
На рис. 1.74 приведена АФЧХ передаточной функции W ( p) , содержащей
два нулевых полюса (два интегрирующих звена). Очевидно, что АФЧХ W ( j ) ,
дополненная дугой бесконечно большого радиуса R , один раз охватывает
точку (1, j 0) в отрицательном направлении, то есть 1 m / 2 . Следовательно,
замкнутая система неустойчива при любом m .
Рис. 1.74
Рис. 1.75
На рис. 1.75 приведена АФЧХ передаточной функции W ( p) , содержащей
пару чисто мнимых полюсов (консервативное звено). Очевидно, что АФЧХ
W ( j ) , дополненная дугой бесконечно большого радиуса R , один раз
охватывает точку (1, j 0) в отрицательном направлении, то есть 1 m / 2 .
Следовательно, замкнутая система неустойчива при любом m .
Подсчет охватов удобно проводить с помощью правила Цыпкина, согласно которому число охватов точки (1, j 0) равно сумме переходов АФЧХ
W ( j ) с учетом знаков вещественной полуоси (, 1) . На рис. 176 показаны
возможные случаи переходов вещественной полуоси (, 1) . Если АФЧХ
W ( j ) касается вещественной полуоси (, 1) , то это эквивалентно тому, что
131
она совершает два полуперехода с обратными знаками, в сумме равных нулю.
Рис. 1.76
Тогда критерий Найквиста можно сформулировать так:
Для устойчивости замкнутой системы с единичной отрицательной обратной связью необходимо и достаточно, чтобы АФЧХ разомкнутой системы
W ( j ) при изменении 0 имела в сумме с учетом знаков m / 2 пере-
ходов вещественной полуоси (, 1) , где m – число правых корней характеристического уравнения разомкнутой системы.
На рис. 1.74, рис. 1.75 АФЧХ имеет один отрицательный переход.
На рис. 1.77 АФЧХ разомкнутой системы имеет отрицательный и положительный переход, сумма которых равна нулю. Тем самым условие устойчивости замкнутой системы 0 m / 2 выполняется при m 0 .
Рис. 1.77
Если АФЧХ разомкнутой системы не имеет переходов вещественной полуоси (, 1) , то сумма переходов равна нулю и замкнутая система устойчи-
132
вая, если разомкнутая система не имеет правых корней.
Вопросы для самопроверки
1. В чем отличие критерия Найквиста от критерия Михайлова?
2. В каком диапазоне частот требуется строить АФЧХ разомкнутой системы
для определения устойчивости замкнутой системы?
3. В каком случае замкнутая система находится на границе устойчивости?
4. Какой смысл имеет частота среза?
5. Как применяется критерий Найквиста для разомкнутой системы, имеющей
корни на мнимой оси?
6. В чем заключается правило переходов Цыпкина?
1.6.5.4. Логарифмический аналог критерия Найквиста
Установим связь переходов для АФЧХ с переходами для ЛАХ и ЛФХ.
Для этого рассмотрим рис. 1.78 и рис. 1.79, на которых отмечены характерные
точки.
133
На рис. 1.78 и рис. 1.79 отрицательному переходу соответствует убывание, а положительному возрастание значения ( ) .
Если АФЧХ разомкнутой системы, представленной рис. 1.78, зеркально
отобразить относительно вещественной оси, то ЛФХ на рис. 1.79 также зеркально отобразиться относительно оси частот, а ЛАХ при этом останется прежней. Для такой разомкнутой системы условие устойчивости по критерию Найквиста не изменится. В этом случае ЛФХ будет пересекать ось .
Таким образом, переходам АФЧХ вещественной полуоси (, 1) на
рис.1.78 соответствует область положительных значений L( ) , для которых
| W ( j ) | 1 , и значение ( ) ; 3 ; 5 ;
. Область, в которой | W ( j ) | 1
или L( ) 20lg | W ( j ) | 0 (на рисунках закрашена) не влияет на устойчивость
замкнутой системы. Значение частоты ср , при которой | W ( jср ) | 1 или
L(ср ) 1 называется частотой среза. В общем случае может существовать
несколько частот среза, т.е. несколько участков положительных значений ЛАХ.
С помощью переходов критерий Найквиста можно сформулировать так:
Для устойчивости замкнутой системы с единичной отрицательной обратной связью необходимо и достаточно, чтобы в области частот, где
L( ) 0 , сумма переходов с учетом знаков ЛФХ разомкнутой системы через
линии ( ) ; 3 ; 5 ;
равнялась m / 2 , где m – число правых корней
характеристического уравнения разомкнутой системы.
Пример 1.27. Для примера 122 при k 5 , T1 1 с, T2 0,1с найти условия
устойчивости замкнутой системы с помощью логарифмического аналога критерия Найквиста.
Построим ЛАХ и ЛФХ разомкнутой системы с помощью программы
MatLab:
k=5; T1=1; T2=0.1;
W=tf([5],[T1 1 0])*tf([1],[T2 1]);
bode(W)
Графики ЛАХ и ЛФХ представлены на рисунке, из которого следует, что
134
в области положительных значений ЛАХ фазовая характеристика не пересекает
ось , и, поскольку, разомкнутая система не содержит правых корней, то замкнутая система является устойчивой, что согласуется с примером 125.
1.6.5.5. Запасы устойчивости
Запасы устойчивости – это величины, которые количественно характеризуют удаление устойчивой системы от границы ее устойчивости. На комплексной плоскости для левых корней характеристического уравнения запасом
устойчивости можно считать наименьшее расстояние корня до мнимой оси. Запасом устойчивости замкнутой системы можно считать удаление АФЧХ разомкнутой системы от точки (1, j 0) .
Действительно, если АФЧХ разомкнутой системы W ( j ) при 0 0
проходит через точку (1, j 0) , то замкнутая система имеет пару чисто мнимых
корней. Это следует из условия W ( j0 ) 1 , которому соответствует уравнение
1 W ( j0 )
D( j0 )
0,
d ( j0 )
где характеристическое уравнение замкнутой системы D( j0 ) 0 должно
иметь пару чисто мнимых корней p1,2 j0 .
Если АФЧХ разомкнутой системы W ( j ) при 0 начинается из точки
(1, j 0) , то замкнутая система имеет нулевой корень.
Таким образом, при выполнении устойчивости замкнутой системы АФЧХ
разомкнутой системы не должна проходить вблизи точки (1, j 0) . Удаление от
этой точки характеризуется запасами по амплитуде A1 , A2 (рис. 1.78) или
135
L1 20lg A1 , L2 | 20lg A2 | (рис. 1.79), запасами по фазе З , равные ближайшим
углам между вещественной полуосью (, 0] и лучам, проходящим через начало координат и соответствующую точку W ( jср ) .
1.6.5.6. Устойчивость систем с запаздыванием
Система с запаздыванием имеет передаточную функцию разомкнутой системы, содержащую звено чистого запаздывания e p :
W ( p) W0 ( p)e p ,
(1.121)
где W0 ( p) m( p) / d ( p) – физически реализуемая передаточная функция. Поскольку характеристическое уравнение замкнутой системы
D( p) d ( p) m( p)e p 0
(1.122)
не является алгебраическим полиномом, то критерий Гурвица здесь не применим. Кроме того, функция e p 1 p p 2 2 / 2!
(1) N N / N !
являет-
ся бесконечным рядом степени p , т.е. уравнение (1.122) имеет бесчисленное
множество корней. Поэтому критерий Михайлова также не применим. Однако
ответить на вопрос об устойчивости корней характеристического уравнения
(1.122) можно с помощью критерия Найквиста. Для этого вместо передаточной
функции (1.121) будем использовать приближенную передаточную функцию
W ( p) W0 ( p)e p
m( p )
e p ,
N
d ( p)( p 1)
(1.123)
где – сколь угодно малое, N сколь угодно большое целое число. Очевидно,
что при 0 передаточная функция W ( p) W ( p) . Также отметим, что при
0 согласно критерию Найквиста устойчивость замкнутой системы не зависит от сколь угодно малой постоянной времени .
Передаточной функции (1.123) соответствует функция
F ( p) 1 W ( p)
d ( p)( p 1) N m( p)e p
,
d ( p)( p 1) N
у которой при N порядок полиномов числителя и знаменателя можно считать одинаковыми. Тогда согласно критерию Найквиста для устойчивости за-
136
мкнутой системы необходимо и достаточно, чтобы приращение аргумента
функции F ( j ) при изменении 0 было равно 2 m / 2 раз, где m –
число правых корней характеристического уравнения d ( p)( p 1) N 0 или
уравнения d ( p) 0 . При 0 функция F ( j ) F ( j ) и условие устойчивости сохраняется, т.е. совпадает с условием устойчивости системы без запаздывания. Поэтому для исследования устойчивости замкнутой системы с передаточной функцией разомкнутой системы (1.121) необходимо построить ее
АФЧХ и применить критерий Найквиста.
Выражение АФЧХ имеет вид:
W ( j ) W0 ( j )e j | W0 ( j ) | e j (0 ( ) ) .
(1.124)
Из формулы (1.124) следует, что при наличии запаздывания вектор
W0 ( j ) поворачивается на угол , не меняя своей длины, что приводит к
повороту АФЧХ по часовой стрелке. Если без учета запаздывания замкнутая
система устойчива и на частоте среза ср имеет запас устойчивости по фазе З ,
то система с запаздыванием выходит на границу колебательной устойчивости
при некотором критическом значении кр , если ср кр З , т.е. при
кр З / ср .
Для АФЧХ W0 ( j ) , представленной на рис. 180, найдем критические
Рис. 1.80
137
значения времени запаздывания по формуле кр i i / ср i , i 1,3 . Тогда согласно критерию Найквиста для m 0 замкнутая система будет устойчивой при
0 кр1 , кр2 кр3 и неустойчивой при кр1 кр2 .
Вопросы для самопроверки
1. Что означает частота среза?
2. Как определяются запасы устойчивости по АФЧХ разомкнутой системы?
3. Почему запасы устойчивости по амплитуде на АФЧХ нельзя откладывать от
точки (1, j 0) ?
4. Как влияет чистое запаздывание на вид АФЧХ?
5. Как влияет чистое запаздывание на устойчивость замкнутой системы?
1.6.5.7. Расширенный критерий Найквиста
Для расширения круга задач, решаемых с помощью критерия Найквиста,
рассмотрим физически реализуемую систему, у которой передаточная функция
разомкнутой системы имеет вид
W ( p, a ) W1 ( p )W2 ( p, a ) ,
(1.125)
где W1 ( p ) – известная передаточная функция физически реализуемого объекта
управления, W2 ( p, a ) – передаточная функция, зависящая от вектора параметров a .
Будем считать, что в точке a* и в ее сколь угодно малой окрестности характеристическое уравнение
1 W ( p, a ) 0
(1.126)
замкнутой системы имеет l m 2 N правых корней, где m количество правых полюсов передаточной функции W ( p, a* ) ; N – число охватов с учетом
знака точки (1, j 0) АФЧХ W ( j , a* ) . Данное свойство выполняется, например, для минимально-фазовых передаточных функций W2 ( p, a ) , где вектор a
состоит из малых постоянных времени ( a* 0 ), не влияющих согласно крите-
138
рию Найквиста на устойчивость замкнутой системы.
Найдем условия устойчивости корней характеристического уравнения
(1.126).
При выполнении равенства W1 ( j )W2 ( j , a ) 1 или существовании решения уравнения
W1 ( j ) 1/ W2 ( j , a )
(1.127)
при некоторых значениях a замкнутая система имеет корни характеристического уравнения p j , расположенные на мнимой оси. Заштрихуем мнимую
ось p j плоскости корней и ее отображение АФЧХ W1 ( j ) на другой комплексной плоскости так, чтобы при возрастании частоты от до эта
штриховка была слева. Учитывая симметричность АФЧХ относительно вещественной оси, будем строить W1 ( j ) и 1/ W2 ( j , a) при изменении от 0 до
. При этом точки p в левой (правой) полуплоскости корней преобразуются в
точки, лежащие слева (справа) от АФЧХ W1 ( j ) .
Пусть передаточная функция W2 ( p, a ) является минимально-фазовой при
любых допустимых значениях a . Тогда при изменении a число правых полюсов разомкнутой системы (1.125) останется равным m .
Построим АФЧХ 1/ W2 ( j , a) для фиксированного значения a . Если ее
график не пересекается с графиком АФЧХ W1 ( j ) или в точке пересечения не
выполняется равенство (1.127), то замкнутая система по-прежнему имеет l
правых корней, поскольку изменение правых корней связано с переходом некоторых корней через мнимую ось при выполнении равенства (1.127) и изменении числа охватов N .
Если указанные графики имеют общие точки при некоторых значениях
частоты и соответствующих параметрах a , то в этом случае некоторые корни
выходят на мнимую ось. В общей точке при фиксированной частоте * АФЧХ
W1 ( j * ) и изменении параметров вектора a корни на мнимой оси либо остают-
ся на ней, либо смещаются в левую или правую полуплоскость. Если осуществ-
139
ляется пересечение с незаштрихованной (с заштрихованной) стороны, то число
правых корней замкнутой системы уменьшается (увеличивается): на один в
точках пересечения W1 ( j 0) и W1 ( j ) ; на два в точке пересечения W1 ( j * ) при
* 0 . При этом участкам АФЧХ 1/ W2 ( j * , a) , для которых суммарное
уменьшение правых корней равно l , соответствуют значения параметров вектора a , обеспечивающих устойчивость замкнутой системы.
С учетом сказанного приходим к расширенной формулировке критерия
устойчивости Найквиста: для устойчивости замкнутой системы с передаточной
функцией разомкнутой системы (1.125), где W2 ( p, a ) минимально-фазовая передаточная функция, такая, что в точке a* и в ее сколь угодно малой окрестности число правых корней l характеристического уравнения (1.126) равно числу
правых корней уравнения 1 W ( p, a* ) 0 , необходимо и достаточно, чтобы в
общих точках графиков W1 ( j ) и 1/ W2 ( j , a) при соответствующей фиксированной частоте * существовали участки АФЧХ 1/ W2 ( j * , a) со стороны
внешней штриховки АФЧХ W1 ( j ) , при переходе на которые за счет изменения параметров вектора a суммарное уменьшение правых корней равнялось l .
Если указанные общие точки отсутствуют, то замкнутая система устойчива только при l 0 .
Если передаточная функция W2 ( p, a ) не является минимально-фазовой и
число правых корней характеристического уравнения (1.126) в точке a* и в ее
сколь угодно малой окрестности отличаются или оно заранее неизвестно, то
аналогичным участкам АФЧХ 1/ W2 ( j * , a) со стороны внешней штриховки
АФЧХ W1 ( j ) соответствуют области параметров a с наименьшим числом
правых корней. В этом случае для проверки устойчивости замкнутой системы
необходимо проверить ее устойчивость для фиксированного a из найденной
области с помощью любого метода.
Рассмотрим также частный случай, когда W2 ( p ) k . Пусть АФЧХ
W1 ( j ) имеет вид рис. 1.81 и значение m 0 .
140
При k 1 число охватов точки (1, j 0) равно N 1, поэтому замкнутая
система неустойчивая и имеет l 0 2(1) 2 правых корня.
Рис. 1.81
При уменьшении коэффициента k точка 1/ k пересекает АФЧХ W1 ( j )
в точке B с незаштрихованной стороны при 0 . Следовательно, два правых
корня характеристического уравнения 1 W ( p) 0 переходят в левую полуплоскость.
При дальнейшем уменьшении коэффициента k пересечение происходит в
точке A с заштрихованной стороны при 0 и, следовательно, два левых корня переходят в правую полуплоскость. Затем вновь после пересечения в точке
C два правых корня переходят в левую полуплоскость.
При увеличении коэффициента k и изменении его скачком от до
точка 1/ k пересекает АФЧХ W1 ( j ) в точке O с незаштрихованной стороны
при . Следовательно, один корень переходит в левую полуплоскость. При
дальнейшем увеличении коэффициента k пересечение происходит в точке D с
незаштрихованной стороны при 0 , т.е. еще один корень переходит в левую
полуплоскость.
Тем самым, область устойчивости замкнутой системы по коэффициенту
k определяется интервалами k4 k 0 , 0 k k1 , k2 k k3 , лежащими со сто-
роны штриховки.
Отметим, что если замкнутая система неустойчивая при любом коэффи-
141
циенте усиления, то такая система называется структурно неустойчивой. На
рис. 1.74 приведен пример структурно неустойчивой системы.
Пример 1.26. Найдем условие устойчивости замкнутой системы при
W1 ( p) 1 / p 3 , W2 ( p) a1 p 2 a2 p a3 , где вектор a состоит из коэффициентов
a1 0 , a2 0 , a3 0 со значениями a1* 0 , a2* 0 , a3* 1.
Выделим вещественную и мнимую часть выражения
1/ W2 ( j , a)
j
U ( , a) jV ( , a) ,
(a3 a1 2 ) ja2
(1.128)
где
a2 2
(a3 a1 2 )
,
.
U ( , a)
V
(
,
a
)
(a3 a1 2 ) 2 a22 2
(a3 a1 2 ) 2 a22 2
(1.129)
Непосредственной подстановкой можно проверить, что функции U ( , a)
и V ( , a) удовлетворяют уравнению
U (, a) C (a) 2 V 2 (, a) R 2 (a)
(1.130)
со значениями C (a) 0,5/ a2 , R (a ) 0,5/ a2 .
Тем самым график правой части уравнения (1.127) на комплексной плоскости представляет смещенную окружность по вещественной оси, а график левой части совпадает с вещественной отрицательной полуосью (рис.1.82), полученный из функции 1 / ( j )2 при положительном 0 . Этим объясняется
расположение штриховки на вещественной отрицательной полуоси.
Указанные графики пересекаются в точке A , в которой выполняется равенство 1/ 2 1/ a2 при * a2 , a3 a1 *2 . Здесь условие расположения
участка АФЧХ 1/ W2 ( j * , a) со стороны внешней штриховки АФЧХ W1 ( j )
можно записать в виде: V ( * , a) / U ( * , a) 0 . Отсюда следует неравенство
a3 a1 *2 или a3 a1a2 .
С помощью критерия Найквиста нетрудно показать, что в точке a* и в ее
сколь угодно малой окрестности, где a3 a1a2 , замкнутая система имеет l 2
142
правых корней. Тем самым, при переходе с участка 2 на участок 1 АФЧХ
1/ W2 ( j * , a) замкнутая система является устойчивой при выполнении нера-
венства a3 a1a2 , что совпадает с условием устойчивости по критерию Гурвица.
Рис. 1.82
Пример 1.27. Для передаточной функции разомкнутой системы
W ( p)
k
p(T1 p 1)(T2 p 1)
(1.131)
найти условие устойчивости замкнутой системы по параметру T2 0 для заданных значений k 3 , T1 1 с.
Передаточную функцию W ( p) представим в виде произведения (1.125),
где
W1 ( p)
k
1
, W2 ( p)
.
p(T1 p 1)
T2 p 1
Тогда в уравнении (1.127) будем иметь
W1 ( j )
k
, 1/ W2 ( j ) 1 jT2 .
j
2
Обозначая x T2 , построим график функции 1 jx правой части при
изменении x от 0 до . Изменяя от 0 до , построим график функции
W1 ( j ) левой части. На рис. 1.83 приведены указанные графики, построенные с
помощью Script-файла:
k=3;T1=1;W1=tf([k],[T1 1 0]);
nyquist(W1,{0.5,25});hold on
x=0:0.1:25; W2=-1-i*x; u=real(W2); v=imag(W2);plot(u,v)
143
Рис. 1.83
По АФЧХ W1 ( j ) найдем частоту 1 1, 41 рад/с, при которой происходит пересечение графиков.
Поскольку замкнутая система при W2 ( p ) 1 устойчивая, то значение
l 0 . Поэтому область устойчивости определяется интервалом AB , располо-
женным со стороны штриховки. Полагая W1 ( j1 ) a jb , где
a 1 ,
b 0,708 , потребуем выполнения неравенства T21 b , при котором интер-
вал AB располагается со стороны штриховки. Отсюда найдем T2 b / 1 0,5 .
Сравним полученный результат с критерием Гурвица, согласно которому
условие устойчивости замкнутой системы с передаточной функцией (1.131)
имеет вид: T2 T1 /(T1k 1) 0,5 .
Таким образом, расширенный критерий Найквиста в отличие от обычного
критерия позволяет определять области устойчивости по параметрам системы.
Вопросы для самопроверки
1. В чем отличие расширенного критерия Найквиста от обычного критерия?
2. По какому правилу определяется область устойчивости замкнутой системы
по параметрам с помощью расширенного критерия Найквиста?
3. Какой интервал частот используется для анализа устойчивости системы?
4. Какая система называется структурно неустойчивой?
144
1.7. Качество процессов автоматического регулирования
Для работоспособности системы помимо требования устойчивости
предъявляются определенные требования к качеству процессов автоматического регулирования. Под качеством САР понимается совокупность требований к
процессу регулирования для выбранной выходной координаты.
Рассмотрим обобщенную структурную схему на рис.1.84. Здесь выходной
сигнал y(t ) повторяет вид входного сигнала g (t ) при действии ограниченного
возмущения f (t ) таким образом, чтобы ошибка (t ) g (t ) yос (t ) была ограниченной. Если, например, Wос ( p ) kос , то (t ) g (t ) kос y (t ) и, следовательно, скорость выходного сигнала y(t ) при lim (t ) 0 не совпадает со скоростью
t
входного сигнала g (t ) . Если Wос ( p ) 1, то выход y(t ) отслеживает вход g (t ) .
Рис. 1.84
При произвольных входных сигналах g (t ) , f (t ) качество САР удобно
оценивать по ошибке (t ) g (t ) yос (t ) . Если входные сигналы g (t ) , f (t ) постоянные, то можно оценивать качество САР по выходу y(t ) .
Движение (t ) или y(t ) содержит переходное и установившееся движение. Переходное движение зависит от начальных условий, вызванных, в том
числе, входными сигналами, которое с течением времени для устойчивой системы затухает, т.е. стремится к нулю. Установившееся движение зависит только от вида входного воздействия. Оценка качества процессов или движения
САУ проводится для переходного и установившегося движения.
Показатели качества регулирования делятся на прямые и косвенные показатели качества.
145
1.7.1. Прямые показатели качества
В инженерной практике наибольшее распространение получили показатели качества для переходной характеристики выхода системы – реакции выхода системы y(t ) на ступенчатое входное воздействие g (t ) g 01(t ) , g 0 const
при отсутствии возмущения и нулевых начальных условиях (рис. 1.85).
Рис. 1.85
Здесь определяются следующие прямые показатели качества:
для установившегося движения
1установившаяся ошибка уст g0 yос уст ;
для переходного движения
2время регулирования tp – минимальное время, по истечении которого
выходная координата y(t ) входит в трубку величиной 2 yуст и не покидает
ее, т.е. выполняется условие | y(t ) yуст | yуст для t tp (обычно 0,05 );
3перерегулирование , которое определятся по формуле
ymax yуст
yуст
100 %.
(1.132)
146
4) время нарастания tí – минимальное время, при котором y(tн ) yуст .
5) число колебаний y(t ) на интервале времени 0 t tp .
Наилучшим считается процесс с наименьшими значениями указанных показателей качества или принадлежащий заданной закрашенной области
рис.1.85.
Переходные движения, вызванные ступенчатыми входными воздействиями, принято делить на три группы (рис. 1.86): 1-монотонные, 2апериодические и 3-колебательные.
У монотонных процессов первая производная
y(t ) не меняет знак, у апериодических знак
производной меняется не более одного раза, а
у колебательных производная y(t ) меняет знак
периодически.
Установившаяся ошибка устойчивой системы может быть найдена по теореме о конечном значении оригинала
уст lim (t ) lim pE( p) ,
t
p0
(1.133)
если известно, что существует предел уст lim (t ) const . Здесь изображение
t
ошибки по Лапласу E ( p) для системы рис. 1 определяется по формуле
E ( p)
1
G ( p) ,
1 W ( p)
где W ( p ) W1 ( p )W2 ( p )Wос ( p ) – передаточная функция разомкнутой системы.
а) Для входного сигнала g (t ) g 01(t ) , соответственно G ( p) g 0 / p . Тогда
получим изображение ошибки
E ( p)
g0
1
.
1 W ( p) p
Полагая W (0) bm / an k 0 , где k – коэффициент усиления разомкнутой системы, найдем
147
уст lim p ( p )
p 0
g0
ст .
1 k
(1.134)
Значение ошибки ст называется статической ошибкой.
Таким образом, установившаяся ошибка согласно выражению (3) зависит
от коэффициента передачи разомкнутой системы k , т.е. чем больше его значение, тем меньше установившаяся ошибка.
Астатизм системы обусловлен наличием в разомкнутой системе интегрирующих звеньев, т.е. ее передаточная функция может быть представлена в виде:
Wраз ( p )
m( p )
,
pv dv ( p)
где v 1,2,... – порядок астатизма, полином d v ( p ) не имеет нулевых корней.
Действительно, в этом случае при постоянном входном воздействии получим
уст
pv dv ( p)
g0
lim p v
0.
p 0
p d v ( p ) m( p ) p
б) Если входное воздействие является линейно нарастающей функцией
времени g (t ) g1t , соответственно G ( p) g1 / p 2 , и степень астатизма v 1
астатизм первого порядка), то
уст lim p
p 0
pd1 ( p )
g1 g1
ск ,
pd1 ( p ) m( p ) p 2 k
(1.135)
где k m(0) / d1 (0) 0 , ск – называется скоростной ошибкой.
Для системы с астатизмом второго порядка ( v 2 ) в этом случае установившаяся ошибка, очевидно, равна нулю.
Приведенные рассуждения можно обобщить для общего случая входного
l
сигнала, представленного в виде полинома g (t ) git i , которому соответi 0
ствует преобразование Лапласа G ( p )
l
l ! gl / pl 1 .
i 0
148
При наличии возмущения f (t ) установившаяся ошибка определяется
аналогично и равна сумме установившихся ошибок от входа g (t ) и возмущения
f (t ) , найденных отдельно.
Пример. Рассмотрим два варианта включения интегрирующего звена,
представленных на рис. 1, рис.2.
Рис. 1.
Рис. 2.
Для рис. 1
1
1
k
p
k
g
1
k
p
f
p
kp
g
f,
pk
pk
f
p
k
g
f.
pk
pk
для рис. 2
1
1
k
p
k
p
g
1
k
p
Следовательно, при постоянных входных сигналах получили разные установившиеся
ошибки по отношению к возмущению.
1.7.2. Косвенные показатели качества
При расчетах САР прямые показатели качества оцениваются с помощью
косвенных показателей, которые делятся на алгебраические, частотные и интегральные показатели.
1.7.2.1. Алгебраические показатели качества
Алгебраические показатели качества позволяют судить о качестве переходного процесса по коэффициентам или корням характеристического уравнения.
149
Рассмотрим корневые показатели качества, связанные с распределением левых корней на комплексной
плоскости (рис. 1.87). Здесь используют степень устойчивости и колебательности.
а) Степенью устойчивости называется расстояние
от мнимой оси до ближайшего левого корня. Степень
устойчивости характеризует быстродействие системы.
Это связано с тем, что быстрота затухания переходного
процесса в значительной мере определяется вещественной частью корня,
наиболее близко расположенного к мнимой оси. При этом справедлива оценка
для времени регулирования tp 3 5/ .
Если ближайшим к мнимой оси является вещественный корень, то ему
соответствует апериодическая составляющая переходного процесса e t c1 (апериодическая степень устойчивости).
Пример 1.28. Рассмотрим систему первого порядка
y(t ) ay(t ) k 1(t ) ,
для которой найдем решение y(t ) . Изображение выхода в преобразованиях
Лапласа при нулевом начальном условии y (0) 0 имеет вид
k
k1
1
,
( p a) p a p p a
Y ( p)
которому соответствует оригинал
y (t )
k
1(t ) e at .
a
Реакция выхода системы y(t ) при a k 10
представлена на рис. 1.88, из которого следует, что
время регулирования определяется из уравнения
y (tp )
1
1
at
1 e p 0,95 yуст 0,95 .
a
a
150
Отсюда найдем e
atp
0,05 или tp ln 0,05/ a 3/ a . Поскольку a , то
для системы первого порядка справедлива оценка tp 3/ . Здесь на рис. 1.88
время регулирования tp 0,3 с.
Если же ближайшей к мнимой оси окажется пара комплексносопряженных корней p1,2 j , то доминирующая составляющая переходного процесса e t ( A sin t B cos t ) является колебательной (колебательная
степень устойчивости).
Для определения степени устойчивости по характеристическому уравнению системы d ( p) 0 проведем замену p p . Тогда получим характеристическое уравнение d ( p, ) 0 , коэффициенты которого зависят от неизвестного параметра . С помощью критерия Гурвица можно найти область устойчивости по параметру 0 , верхняя граница которого определяет значение
степени устойчивости системы, поскольку при корнях уравнения d ( p, ) 0 ,
расположенных на мнимой оси, корни уравнения d ( p) 0 имеют степень
устойчивости .
в) При наличии комплексно-сопряженных корней используется степень
колебательности, которая характеризует быстроту затухания колебаний за
каждый период и определяется величиной tg , где – наименьший угол сектора, которому принадлежат левые корни на комплексной плоскости (рис.
1.87).
Действительно, для пары комплексно-сопряженных корней p1,2 j ,
0 , 0 , которым соответствует равенство tg / , составляющую решения можно представить в виде e t ( A sin t B cos t ) с периодом колебаний
Tê 2 / . Тогда через один период амплитуда e t уменьшится до величины
e ( t 2 / ) e t e2 / , т.е. чем больше величина / , тем слабее будет затухание колебаний для данной составляющей переходного процесса.
151
Отметим, что комплексно-сопряженным корням p1,2 j соответствует полином T 2 p 2 2T p 1 при 0 1, для которого справедливы равенства /T , 1 2 /T . Тогда получим / 1/ 2 1 , т.е. степень колебательности зависит от коэффициента демпфирования .
1.7.2.2. Частотные показатели качества
Частотные показатели качества позволяют судить о качестве переходного
процесса по частотным характеристикам замкнутой и разомкнутой системы.
Основанием для этого служит связь весовой характеристики системы с ее частотной характеристикой, построенной по передаточной функции или экспериментально.
Действительно, если известна передаточная функция системы (замкнутой
или разомкнутой) W ( p) , то согласно обратному преобразованию Лапласа весовую функцию можно найти по формуле
w(t )
1
j
2 j j
W ( p)e pt dp ,
(1.136)
где путь интегрирования в комплексной плоскости p выбирается правее полюсов изображения W ( p) , при которых оно обращается в бесконечность. Для
устойчивых систем полюса передаточной функции W ( p) лежат в левой полуплоскости, поэтому в формуле (1.136) можно положить 0 и p j . Учитывая, что при замене переменной p j изменяются пределы интегрирования
p
j
j
j
в формуле (1.136), получим формулу обратного преобразования
Фурье:
1
w(t )
2
W ( j )e
jt
d ,
(1.137)
где АФЧХ W ( j ) называется изображение Фурье весовой функции w(t ) для
значений t 0 . При этом w(t ) 0 , т.е. справедливо выражение
152
1
0
2
W ( j )e
jt
d .
(1.138)
Суммируя выражения (1.137) и (1.138) получим
1
w(t )
2
W ( j ) e
jt
e
jt
d W ( j )cos t d
1
0
1
W ( j )cos t d W ( j )cos t d
0
0
1
W ( j )cos t d W ( j )cos t d
0
1
.
W ( j ) W ( j ) cos t d.
0
С учетом равенства W ( j ) P( ) jQ( ) найдем
w(t )
2
P( )cos t d .
(1.139)
0
Для определения переходной функции проинтегрируем выражение
(1.139) по времени:
t
h(t ) w( )d
0
2
t
P( ) cos t dt d
0
0
2
P( )
0
sin t
d .
(1.140)
Тем самым, зная вещественную частотную характеристику P( ) , можно
построить переходную характеристику h(t ) одним из способов приближенного
вычисления интеграла (1.140), приведенного в [1]. При этом характер переходного процесса зависит от вида частотной характеристики P( ) .
а) Для замкнутой системы с передаточной
функцией
WЗ ( p )
W ( p)
где W ( p) – передаточная функ1 W ( p)
ция разомкнутой системы строится амплитудночастотная
характеристика
AЗ ( ) | WЗ ( j ) |
153
(рис.1.89). Здесь p – резонансная частота, при которой AЗ ( ) достигает максимального значения AЗ max ; п – частота, при которой AЗ (п ) 0,707 AЗ (0) ,
определяет полосу пропускания системы (0,п ) . Полоса пропускания не должна
быть слишком широкой, иначе система будет воспроизводить высокочастотные
помехи. Частота среза ср , при которой AЗ (ср ) 1, косвенно характеризует
время регулирования tp (1 2) 2 / ср , т.е. чем больше частота среза ср , тем
меньше длительность переходного процесса. Физически это связано с тем, что
чем более высокие частоты пропускает система, тем менее она инерционна в
своих реакциях на входные воздействия.
Другой оценкой качества переходного процесса является показатель колебательности M AЗ max / AЗ (0) , величина которого характеризует склонность системы к колебаниям. Чем выше значение M , тем менее качественна
система при прочих равных условиях.
При проектировании линейных САР принято задаваться значениями
M 1,1 1,7 . При этом значениям M 1,1 1,3 соответствует очень хорошее
демпфирование, значениям M 1,3 1,5 – хорошее демпфирование, значениям
M 1,5 1,7 – удовлетворительное демпфирование переходного процесса.
Обеспечение малых значений показатель колебательности 1 M 1,1
требует применения более сложных и дорогостоящих корректирующих средств
и ведет к неоправданному усложнению системы.
Для астатической САР AЗ (0) 1 , для статической САР
AЗ (0)
и при W (0)
W (0)
1 W (0)
1 значение AЗ (0) 1 . Поэтому в дальнейшем будем полагать
M AЗ max . Физически это означает, что в установившемся режиме выход си-
стемы равен входному постоянному сигналу.
По известной АФЧХ разомкнутой системы W ( j ) U ( ) jV ( ) можно
найти значение M с помощью выражения
154
| W ( j ) |
M
|1 W ( j ) |
U 2 ( ) V 2 ( )
1 U ( )
2
V ( )
.
2
Отсюда получим
2
U 2 ( ) V 2 ( ) 1 U ( ) V 2 ( ) M 2
или
U ( ) C 2 V 2 ( ) R 2 ,
(1.141)
где C M 2 /( M 2 1) , R M /( M 2 1) .
Задавая различные значения M по формуле
(1.141) можно построить семейство окружностей со
смещенным центром C и радиусом R на комплексной плоскости (рис. 1.90). Здесь угол является запасом устойчивости по фазе для той системы, у которой АФЧХ W ( j ) касается окружности M const в
точке B . Величину можно определить из треугольника OBO1 с учетом теоремы косинусов
R2 A2 C 2 2 AC cos ,
откуда
A2 C 2 R 2
cos
.
2 AC
С учетом выражений для C , R получим
M 2 A2 ( M 2 1)
arccos
.
2 AM 2
(1.142)
Из рис. 1.90 следует, что зависимость (1.142) существует только для модулей A , лежащих в пределах A1 A A2 , где A1 M /( M 1) , A2 M /( M 1) ,
M 1 . Вне этих пределов запас по фазе может быть любым, так как в этом случае конец вектора не может попасть в запретную область.
После построения АФЧХ разомкнутой системы W ( j ) показатель колебательности M определяется по точке касания к одной из окружностей.
155
На рис. 1.91 представлена АФЧХ и окружности (6), на которых для удобства вместо значений M указаны значения 20lg M . Здесь значению 20lg M 4
дБ соответствует M 1,58 .
Рис. 1.91
Для построения рис. 1.91 в системе MATLAB можно использовать команду nyquist(W);grid
Величина показателя колебательности M может быть определена и в
случае использования ЛАХ и ЛФХ. В этом случае граница запретной области
для ЛФХ при известной ЛАХ строится по показателю колебательности
M const (рис. 1.190) как отображение полуокружности на логарифмическую
плоскость (рис. 1.92) с учетом ее расположения относительно АФЧХ W ( j ) .
Порядок отображения состоит в следующем: некоторому значению амплитуды
A1 | W ( ji ) | A2 при частоте i соответствует точка Bi на окружности со зна-
чением модуля A(i ) | W ( ji ) | и фазы 180 i , которая отмечается на графике ЛФХ.
Пример 1.2.9. Для разомкнутой системы с передаточной функцией
156
W ( p)
k
p(T1 p 1)(T1 p 1)
при k 2 , T1 1 с, T2 0,01 с построить запретную область ЛФХ при M 1,54 .
Решение задачи в системе MATLAB проведем с помощью Script-файла:
k=2; T1=1; T2=0.01; M=1.54;
W=tf([k],[T1 1])*tf([1],[T2 1 0]);
[mag,phase,omega]=bode(W,{0.01,100}); [n,m]=size(omega)
subplot(2,1,1);
semilogx(omega,20*log10(mag(:))),grid on
subplot(2,1,2);
semilogx(omega,phase(:));hold on
for i=1:n; if mag(i)<M/(M+1)|mag(i)>M/(M-1);
fi(i)=-180;
else
fi(i)=-180+acos((M^2+mag(i)^2*(M^2-1))/(2*mag(i)*M^2))*180/pi;
end;
end;
semilogx(omega,fi), grid on
Результат выполнения программы после редактирования представлен на
рис. 1.92, где закрашенная запретная область указывает на то, что замкнутая
система имеет показатель колебательности M 1,54 .
Рис. 1.92
157
б) Для разомкнутой системы показатели качества замкнутой системы
также можно охарактеризовать запасами устойчивости по амплитуде и фазе для
ЛАХ и ЛФХ, рассмотренные в подразделе 1.6.4.4. В хорошо демпфированных
системах запасы устойчивости по модулю L1 , L2 находятся в пределах от 6 до
20 дБ, а запас по фазе З – от 30 до 60 . Время регулирования t p замкнутой системы связано с частотой среза разомкнутой системы cp выражением
tp b / cp , где b поправочный коэффициент, значение которого зависит от
вида вещественной частотной характеристики P( ) замкнутой системы [9].
1.7.2.3. Интегральные показатели качества
Интегральные показатели качества позволяют судить о характере переходного процесса по заданному функционалу, зависящего от переходной составляющей ошибки п (t ) (t ) уст (или отклонения от невозмущенного
движения), которая при t стремится к нулю.
В качестве функционала наиболее часто используются простейшая J 0
или улучшенная J1 интегральная квадратичная оценка:
J 0 п2 (t )dt ,
(1.143)
0
J1 п2 (t ) 12 п2 (t ) dt ,
(1.144)
0
где 1 0 – весовой коэффициент учитывает скорость п . Аналогично строятся
квадратичные оценки, учитывающие ускорение сигнала п (t ) и т.д. Оценка
(1.143) характеризует значение площади под кривой п (t ) : чем больше ее величина, тем хуже качество переходного процесса. В оценке (1.144) процесс считается наилучшим при наименьших значениях п (t ) , п (t ) . Это условие является
противоречивым, поскольку при малых значениях п (t ) процесс п (t ) будет затягиваться во времени, что приведет к росту значения J1 . Тем самым, для
158
оценки (1.144), в отличие от оценки (1.143), существует некоторый оптимальный процесс.
Достоинство оценок (1.143), (1.144) состоит в том, что по заданному
дифференциальному уравнению для п (t ) их вычисление можно свести к решению системы линейных уравнений. Рассмотрим эту процедуру для системы
второго порядка.
Пусть дифференциальное уравнение для переходной составляющей
ошибки имеет вид
п a1 п a2 п 0 ,
(1.145)
для которого введем вектор состояния x [ п , п ]T . Тогда систему (1.145) и
оценку (1.144) можно записать следующим образом:
x Ax ,
(1.146)
J1 xT (t )Qx(t )dt ,
(1.147)
0
где
0
A
a2
1 0
1
,
.
Q
2
a1
0 1
Найдем вспомогательную функцию V ( x) xT Kx , для которой выполняется свойство V ( x) xT Qx . Тогда
V ( x)dt dV ( x) V ( x()) V ( x(0)) x
0
0
T
(t )Qx(t )dt
0
Поскольку при t выполняется условие x (t ) 0 , то V ( x()) 0 и, следовательно,
V ( x(0)) xT (t )Qx(t )dt .
0
т.е. J1 V ( x(0)) xT (0) Kx(0) .
С учетом уравнения (11) получим
159
V ( x) xT Kx xT Kx xT AT K KA x xT Qx .
Поэтому для произвольных значений вектора x справедливо равенство
AT K KA Q ,
(1.148)
которое называется уравнением Ляпунова относительно неизвестной матрицы
K.
Уравнение (13) обладает свойством
( AT K KA)T AT K T K T A QT Q ,
из которого следует, что матрица K T также является решением уравнения
(1.148). Следовательно, матрица K K T , т.е. является симметричной.
Для рассматриваемой системы получим уравнение
0 a2 k11
1 a k
1 12
k12 k11
k22 k12
k12 0
k22 a2
1 0
1
,
2
a1
0
1
из которого следуют равенства
2a2 k12 1,
2k12 2a1k22 12 ,
k11 a1k12 a2 k22 0.
Отсюда найдем выражение для элементов матрицы K :
1 12 a2
a12 (1 12 a2 )a2
1
k12
, k22
, k11
.
2a2
2a1a2
2a1a2
Если задано начальное условие x(0) [ п (0),0]T , то
J1 x (0) Kx(0)
T
k11 п2 (0)
a12 (1 12 a2 )a2 2
п (0) .
2a1a2
(1.149)
При 1 0 получим выражение для J 0 :
a12 a2 2
J0
п (0) .
2a1a2
(1.150)
Известно, что оценка (1.144) принимает минимальное значение на решении уравнения
160
1 п п 0 ,
(1.151)
которое имеет вид п (t ) et /1 п (0) . Поэтому параметр 1 можно выбрать по
заданному времени регулирования tp 31 , т.е. 1 tp / 3 .
Из уравнения (1.145) следует уравнение (1.151), если положить a1 1a2
и устремить a2 . В этом случае при a21 0 из уравнения
a21 п 1 п п 0 ,
получим уравнение (1.151) и оценка J1 1 п2 (0) .
При одних и тех же начальных условиях на рис. 10 приведены переходные процессы для различных значений a2 при a1 1a2 , 1 1, где также указаны соответствующие значения оценки (14).
Таким образом, с помощью интегральных квадратичных оценок (8), (9)
можно не только оценивать качество переходных процессов, но и осуществлять
выбор l - вектора настраиваемых параметров системы из необходимых условий экстремума J1 / i 0 , i 1, l .
Рис. 1.93
Для решения уравнения Ляпунова (13) численным методом в системе
MATLAB можно использовать команду K=lyap(A',Q).
161
Вопросы для самопроверки
1. Что характеризуют основные показатели качества САР?
2. В чем отличие косвенных показателей качества от основных показателей?
3. От чего зависит установившаяся ошибка в замкнутой системы?
4. На чем основаны алгебраические показатели качества?
5. На чем основаны частотные показатели качества?
6. Что означает полоса пропускания системы?
7. Что характеризует частота среза?
8. Что характеризует показатель колебательности?
9. Как связан показатель колебательности с запасами устойчивости по амплитуде и фазе АФЧХ разомкнутой системы?
10. Как определяются интегральные квадратичные оценки?
1.8. Синтез САУ
Обеспечение желаемого качества САР, т.е. заданной точности и качества
переходного процесса, осуществляется двумя способами. Первый способ связан
с настройкой регулируемых параметров заданной структуры САР, например,
коэффициентов усиления, постоянных времени. Такой способ называется параметрическим синтезом. Если же изменением параметров не удается добиться заданного качества процессов, то используется второй способ, связанный с
изменением структуры САР за счет введения в канал управления регулятора, в
котором реализуется закон управления. В качестве регулятора может быть использован типовой регулятор с фиксированной структурой, настройкой параметров которого добиваются заданного качества САР. Если с помощью таких
регуляторов не удается обеспечить требуемое качество процессов, то используются специальные корректирующие устройства, структура и параметры которых определяются в результате решения задачи синтеза.
162
1.8.1. Синтез типовых регуляторов
В качестве типовых регуляторов в промышленности широко используются регуляторы, в которых реализуется закон управления от измеряемого сигнала ошибки (t ) :
t
d (t )
u (t ) k1 (t ) k2
k3 ( )d
dt
(1.152)
0
или в операторной форме записи:
u( p ) Wрег ( p ) ( p ) ,
где Wрег ( p) k1 k2 p k3 / p – передаточная функция регулятора в преобразованиях Лапласа, k1 0, k2 0, k3 0 – соответствующие коэффициенты усиления. Регулятор с законом управления (1.152) содержит пропорциональную,
дифференциальную и интегральную составляющую, и поэтому называется
ПИД-регулятором. Звено с передаточной функцией k2 p физически нереализуемо, поэтому на практике используется приближенная передаточная функция
k2 p /(Tp 1) , где T – малая постоянная времени.
Для определения параметров k1 , k2 , k3 , при которых обеспечивается заданное качество переходных процессов замкнутой системы, можно использовать различные методы.
1. Частотный метод определения параметров ПИД-регулятора.
Рассмотрим задачу выбора параметров ПИД - регулятора замкнутой системы с известной АФЧХ объекта управления с помощью расширенной формулировки критерия Найквиста полагая W2 ( p, a ) Wрег ( p ) .
Тогда передаточную функцию разомкнутой системы (1.125) можно представить в виде
(k2 p 2 k1 p k3 )
.
W ( p, a) W1( p)
p
(1.153)
Будем полагать, что в точке a* замкнутая система с передаточной функцией W ( p, a* ) W1 ( p) имеет l правых корней и соответствующий ей фрагмент
163
АФЧХ имеет, например, вид, изображенный на рис. 1.94.
Найдем условие на выбор параметров k1 0, k2 0, k3 0 , при которых
замкнутая система с передаточной функцией (1.153) разомкнутой системы имеет заданный запас устойчивости по фазе 3 . В этом случае на частоте среза cp
должно выполняться равенство
W ( jcp , a) e j ( 3 ) .
(1.154)
Рис. 1.94
Для определения условий, при которых выполняется равенство (1.154), с
учетом e j ( 3 ) e j3 запишем уравнение
W1( j ) 1/ W2 ( j, a) ,
(1.155)
(k3 k2 2 ) k1 j j3
где W2 ( j, a)
.
e
j
Тем самым выполнение условия (1.154) сводится к проверке устойчивости по расширенной формулировке критерия Найквиста с использованием
уравнения (1.154).
С учетом выражений (1.128)-(1.130) при a1 k2 , a2 k1 , a3 k3 , нетрудно
проверить, что график правой части уравнения (1.154) на комплексной плоско-
164
сти представляет смещенную окружность, повернутую против часовой стрелки
на угол 3 (рис. 1.94).
Значение частот среза cp , при которых выполняется равенство (1.154)
определяется в точках пересечения АФЧХ левой и правой части равенства
(1.155).
Например, на рис. 1.94 имеются две точки пересечения при двух значениях 1* и 2* 1* . При этом дуге окружности AB , лежащей со стороны штриховки АФЧХ W1 ( j ) , соответствуют параметры ki , i 1,3 , обеспечивающие запас по фазе не меньше 3 , если дуге окружности AOB соответствуют параметры, при которых l 2 .
Тем самым, заданный запас по фазе 3 может быть обеспечен для значений частоты среза 1* cp 2* . Для увеличения частоты среза (уменьшения
времени регулирования) можно увеличить значение коэффициента k1 , что приведет к уменьшению радиуса повернутой окружности. Если указанная окружность окажется полностью с незаштрихованной стороны, то желаемый запас по
фазе 3 не достигается.
При фиксированном коэффициенте k1 найдем условия на выбор коэффициентов k2 , k3 , полагая в точках пересечения W1 ( ji* ) ai jbi , i 1,2 , где значения ai , bi определяются из графика рис. 1.94. С учетом выражений (1.128),
(1.129) при a1 k2 , a2 k1 , a3 k3 , а также e j3 cos 3 j sin 3 из уравнения
(1.155) получим равенство
ai jbi U (i* )cos 3 V (i* ) sin 3 j U (i* ) sin 3 V (i* )cos3 .
Для того чтобы параметры k2 , k3 соответствовали дуге окружности AB
со стороны штриховки АФЧХ W1 ( j ) должны выполняться неравенства
165
b1 U (1* ) sin 3 V (1* )cos 3
,
tg1
a1 U (1* )cos 3 V (1* ) sin 3
tg2
b2 U (2* ) sin 3 V (2* )cos 3
,
a2 U (2* )cos 3 V (2* ) sin 3
из которых следуют условия:
k2 0, k3 0 ,
(1.156)
k3 k21*2
b1 cos 3 a1 sin 3
k11* ,
b1 sin 3 a1 cos 3
(1.157)
k3 k22*2
b2 cos 3 a2 sin 3
k12* .
b2 sin 3 a2 cos 3
(1.158)
Условия (1.156)-(1.158) также справедливы в случае, когда АФЧХ W1 ( j )
в области высоких частот имеет точки пересечения с дугой AOB , поскольку
дуга окружности AB является самой внешней по отношению к штриховке
АФЧХ W1 ( j ) .
Таким образом, если при фиксированном значении параметров из области
(1.156)-(1.158) в замкнутой системе достигается заданный запас по фазе не
меньше 3 , то это будет справедливо для каждой точки выпуклой области
(1.156)-(1.158).
Аналогично можно найти условия на выбор параметров ki , i 1,3 , при
которых замкнутая система имеет заданный запас устойчивости по модулю. В
этом случае на частоте пресечения АФЧХ W ( j , a) с вещественной осью
должно выполняться равенство W ( j , a) A3 , где 0 A3 1 . При этом в
(k3 k2 2 ) k1 j
уравнении (1.155) W2 ( j, a)
, где ki ki / A3 , i 1,3 , а параj
метры ограничены с помощью неравенств
k2 0, k3 0 ,
(1.159)
166
k3 k21*2 b1k11* / a1 ,
(1.160)
k3 k22*2 b2k12* / a2 .
(1.161)
При совместном выполнении условий (1.156)-(1.158) и (1.160), (1.161)
определяется область значений коэффициентов k i , i 1,3 , при которых обеспечиваются запасы устойчивости по фазе не меньше и по амплитуде не больше
заданных.
Пример 1.30. Для разомкнутой системы (1.153) с передаточной функцией
W1 ( p) 1/( p 1) 4 при k1 1 найдем параметры k2 , k3 , при которых в замкнутой
системе обеспечиваются запасы по фазе не меньше 3 60 град и амплитуде не
больше A3 0,1778 .
Фрагмент графика АФЧХ W1 ( j ) и АФЧХ 1/ W2 ( j, a) , построенных с
помощью вычислительного пакета MATLAB, имеют вид рис. 1.95, из которого
для неравенств (1.157), (1.158) найдены значения: 1* 0,37 , a1 0,123 ,
b1 0,765 ; 2* 1, 2 , a2 0,159 , b2 0,0587 . По данным значениям на рис. 3
построена область (1.156)-(1.158) ограниченная прямыми 1 и 2.
Рис. 1.95
Рис. 1.96
Соответственно для неравенств (1.160), (1.161) получены значения:
1* 1, 24 , a1 0,154 , b1 0,0604 ; 2* 2, 22 , a2 0,0059 , b2 0,0318 . По
данным значениям на рис. 3 построена область (1.159) - (1.161) ограниченная
167
прямыми 3 и 4.
Пересечение указанных областей на рис. 1.95 закрашено. При этом для
точки k 2 2 , k3 0,5 из данной области на рис. 1.96 приведена АФЧХ W ( j ) ,
у которой запас по фазе 3 66,7 град, запас по амплитуде A3 0,1496 . Тем
самым, для любой точки закрашенной области запасы по фазе не меньше 3 и
по амплитуде не больше A3 .
Полагая 3 0 , из неравенств (1.156)-(1.158) здесь можно определить область устойчивости по коэффициентам k2 , k3 , которую также можно найти с
помощью критерия Гурвица. Однако здесь при использовании данного критерия для передаточной функции W1 ( p ) , у которой порядок полинома знаменателя n 4 , приходится решать нелинейные неравенства.
Отметим, что большинство технических систем являются устойчивыми в
разомкнутом состоянии (m 0) или при их замыкании отрицательной обратной
связью ( l 0 ). В этом случае для синтеза ПИД - регулятора не требуется знание
математической модели разомкнутой системы, а достаточно знание ее АФЧХ
W1 ( j ) в области средних частот, которая может быть построена эксперимен-
тально по известной переходной характеристике устойчивой разомкнутой или
замкнутой системы. Если при малых значениях параметров k2 , k3 замкнутая
система с ПИД – регулятором остается устойчивой, то для настройки его параметров можно использовать полученные условия (1.156)-(1.158), (1.160),
(1.161).
Таким образом, с помощью расширенной формулировки критерия Найквиста установлено, что области устойчивости, допустимых запасов устойчивости по фазе и амплитуде по неотрицательным параметрам k2 , k3 ПИД – регулятора являются выпуклыми и определяются линейными неравенствами не зависимо от порядка системы.
2. Определение параметров регулятора с помощью интегральных оценок.
Для определения настраиваемых параметров i , i 1, l ОУ, типового ре-
168
гулятора можно использовать интегральную оценку (1.144). Указанные параметры определяются аналитически из необходимых условий экстремума
J1 / i 0 , i 1, l .
Настройку параметров также можно проводить экспериментально с реальным ОУ или его моделью, реализованной на ПЭВМ. Для этого по измеренным сигналам ï (t ) , ï (t ) вычисляется значение J1 ( (1) ) для некоторых значений параметров вектора (1) . Затем путем варьирования первого параметра
1(2) 1(1) 1 при фиксированных остальных параметрах определяется
наименьшее значение J1 ( (2) ) J1 ( (1) ) . После этого, варьируя второй параметр 2(3) 2(2) 2 , определяется наименьшее значение J1 ( (3) ) J1 ( (2) ) .
Данная процедура повторяется последовательно для каждого параметра до тех
пор, пока варьирование параметров не приводит к уменьшению значения J1 .
Такой метод называется методом последовательной оптимизации.
3. Реализация ПИД-регуляторов.
Регулятор с законом управления (1.152) представлен на структурной схеме рис. 1.97. Недостатком данной схемы является то, что при скачкообразном
изменении входного сигнала g (t ) его производная принимает большое значение. Поэтому сигнал u2 может принимать недопустимое значение, приводящее
к насыщению значения u .
Рис. 1.97
Рис. 1.98
169
Поскольку определение параметров ПИД-регулятора проводится из условия устойчивости замкнутой системы и не связано с видом входного сигнала g ,
то, очевидно, что устойчивость системы не изменится в результате эквивалентного преобразования структурной схемы рис. 1.97 при значении g 0 . Поэтому
для реализации ПИД-регулятора часто используется структура, изображенная
на рис. 1.98. В этой структуре дифференцируется только сигнал обратной связи.
Поскольку этот сигнал обычно изменяется медленно в силу инерционности
объекта управления, то управляющий сигнал u2 не будет принимать таких
больших значений, как в системе на рис. 1.97.
Иногда применятся еще одна модификация структуры регулятора, изображенная на рис. 1.99. В этой структуре входной сигнал передается только по
каналу интегрирования в виде сигнала u4 .
Рис. 1.99
Рис. 1.100
Поэтому при ступенчатом входном сигнале g в результате постепенного
увеличения сигнала u3 управляющий сигнал u не будет подвергать удару объект управления, как в системе на рис. 1.98.
Если кроме измерения выходного сигнала системы можно измерить и
скорость его изменения, то регулятор лучше всего реализовать с помощью схемы на рис. 1.100. При данном способе реализации дифференцирование вообще
отсутствует, хотя характеристическое уравнение замкнутой системы остается
тем же. Здесь не возникают проблемы, связанные с дифференцированием сигнала, т.е. усиления высокочастотного шума, присутствующего в измерениях
сигнала yос .
170
1.8.2. Синтез последовательного корректирующего устройства
В некоторых случаях не удается обеспечить требуемое качество процессов с помощью настройки параметров ПИД-регулятора. В этом случае проводится синтез корректирующего устройства, т.е. определяется структура и параметры регулятора. Рассмотрим процедуру синтеза последовательного корректирующего устройства, для системы, обобщенная структурная схема которой
имеет вид рис.1.101, где ООУ – обобщенный объект управления.
Рис. 1.101
Регулятор включает электронный усилитель с коэффициентом усиления
k y и последовательное корректирующее устройство с передаточной функцией
Wк ( p ) , Wк (0) 1 .
При подаче на вход постоянного сигнала g (t ) g 0 система называется системой стабилизации и для ее работоспособности в разомкнутой системе может отсутствовать интегрирующее звено. Если на вход поступает сигнал g (t )
неизвестной функции времени, то система называется следящей системой и для
ее работоспособности в замкнутой системе должны присутствовать интегрирующие звенья. Обычно сигнал g (t ) аппроксимируют кусочно-линейными функциями, и расчет коэффициента усиления k y проводят на входной сигнал
g (t ) g 0 g1t , где g1 – возможная максимальная по модулю скорость. В этом
случае в разомкнутой системе должно присутствовать хотя бы одно интегрирующее звено, которое обычно содержит ООУ.
171
Аналогично необходимость наличия интегрирующих звеньев зависит
также от вида возмущения f (t ) .
Независимо от типа системы требуется, чтобы в замкнутой системе вы*
полнялись следующие прямые показатели качества: уст уст
, tp tp* , * ,
*
где уст
, t p* и * – заданные ошибка, время регулирования и перерегулирова-
ние. Процедура синтеза состоит из двух этапов: статического и динамического
расчета.
I. Статический расчет.
*
По заданному значению ошибки уст
определяется требуемое значение
коэффициента усиления k y . Для простоты будем полагать, что внешнее воздействие отсутствует. Тогда для системы стабилизации согласно формуле (1.134)
установившаяся ошибка определяется по формуле:
уст lim p ( p )
p 0
g0
,
1 kраз
(1.162)
где kраз kуWк (0)W1 (0)W2 (0)Wос (0) – коэффициент усиления разомкнутой системы.
Для следящей системы согласно формуле (1.135) установившаяся ошибка
определяется по формуле:
уст lim p ( p )
p 0
g1
.
kраз
(1.163)
*
Отсюда с учетом условия уст уст
из формул (1.162), (1.163) определя-
ются условие на выбор коэффициента k y .
Аналогично определяется коэффициент усиления при наличии возмущения f (t ) .
II. Динамический расчет
По заданным значениям времени регулирования t p* и перерегулирования
* определяется передаточная функция WК ( p ) корректирующего устройства.
172
Для этого введем передаточную функция WН ( p ) разомкнутой нескорректированной системы с найденным коэффициентом k раз :
WН ( p ) kуW1 ( p )W2 ( p )Wос ( p ) .
(1.164)
При этом передаточная функция разомкнутой желаемой системы имеет вид
WЖ ( p ) WК ( p )WН ( p ) . Тогда по известной передаточной функции WЖ ( p )
определяется передаточная функция коррекции WК ( p ) WЖ ( p ) / WН ( p ) .
Для определения условий на выбор WЖ ( p ) запишем передаточную
функцию замкнутой системы по ошибке:
W g ( p )
1
.
1 WK ( p )WH ( p )
С учетом выражений WН ( p ) mH ( p ) / d H ( p ) , WЖ ( p ) mЖ ( p ) / d Ж ( p )
получим передаточную функцию корректирующего устройства
WK ( p )
WЖ ( p ) mЖ ( p )d H ( p )
.
WН ( p ) d Ж ( p )mH ( p )
При этом реальная передаточная функция разомкнутой системы имеет вид
WK ( p )WH ( p )
mЖ ( p )d H ( p ) mH ( p )
d Ж ( p )mH ( p ) d H ( p )
в которой не допускается сокращения одинаковых множителей числителя и
знаменателя передаточных функций WK ( p ) , WН ( p ) поскольку они относятся к
разным физическим устройствам, и их сокращение равносильно снижению
действительного общего порядка уравнения разомкнутой системы.
Тогда выражение передаточной функции замкнутой системы по ошибке
имеет вид
W g ( p )
из
которого
mH ( p )d H ( p )d Ж ( p )
1
,
1 WK ( p )WH ( p ) mH ( p )d H ( p )[ d Ж ( p ) mЖ ( p )]
с
учетом
обозначений
DЖ ( p ) d Ж ( p ) mЖ ( p ) , следует уравнение для ошибки :
l ( p ) DЖ ( p ) l ( p )d Ж ( p ) g .
l ( p) mH ( p)d H ( p) ,
173
Таким образом, характеристическое уравнение замкнутой системы
l ( p ) DЖ ( p ) 0
содержит не только корни желаемого характеристического полинома DЖ ( p ) ,
но и корни полинома l ( p ) , которые могут располагаться в близи границы
устойчивости (для минимально-фазовых систем) или даже быть неустойчивыми
(для неминимально-фазовых систем).
В то же время реакция системы (t ) на типовое входное воздействие g (t )
при нулевых начальных условиях не зависит от корней полиномов l ( p ) , поскольку для изображения Лапласа ( p ) допускается сокращение одинаковых
множителей l ( p ) в числителе и знаменателе передаточной функции, что может
создать обманчивую картину выполнения требуемого качества.
Для устранения данного недостатка проведем факторизацию числителя и
знаменателя передаточной функции
WН ( p )
mН+ ( p )mН ( p )
,
d Н+ ( p )d Н ( p )
где символы "+" и "–" обозначают полиномы, корни которых удовлетворяют и
не удовлетворяют требуемым запасам устойчивости соответственно.
Передаточную функцию разомкнутой желаемой системы примем в виде
WЖ ( p )
+
mЖ
( p )mН ( p )
.
+
dЖ
( p )d Н ( p )
Тогда получим передаточную функцию коррекции
WЖ ( p) m Ж ( p )mН ( p ) d Н ( p )d Н ( p ) m Ж ( p )d Н ( p )
,
WК ( p)
WH ( p) d Ж
( p)d Н ( p) mН ( p)mН ( p ) d Ж
( p )mН ( p )
в которой сокращаются общие множители числителя и знаменателя, поскольку
они относятся к одному физическому устройству.
Тогда с помощью передаточной функции разомкнутой системы
mЖ ( p )d Н ( p ) mН ( p )mН ( p )
WК ( p )WH ( p )
d Ж ( p )mН ( p ) d Н ( p )d Н ( p )
найдем передаточную функцию замкнутой системы по ошибке
174
dЖ
( p )mН ( p )d Н ( p )d Н ( p )
.
W g ( p )
mН ( p )d Н ( p )[ d Ж
( p )d Н ( p ) mЖ
( p )mН ( p )]
с характеристическим уравнением
mН ( p )d Н ( p )[ d Ж
( p )d Н ( p ) mЖ
( p )mН ( p )] 0 .
Поскольку корни полиномов mН ( p ) , d Н ( p ) являются допустимыми, то
полиномы
dЖ
( p) ,
mЖ
( p)
выбираются
так,
чтобы
корни
полинома
dЖ
( p )d Н ( p ) mЖ
( p )mН ( p ) удовлетворяли требуемым показателям качества.
Таким образом, при построении WЖ ( p ) необходимо включать в нее полиномы mН ( p ) , d Н ( p ) передаточной функции WН ( p ) .
В инженерной практике наибольшее распространение получил метод построения WЖ ( p ) с помощью ЛАХ. Поэтому процедура синтеза корректирующего устройства связана с построением ЛЧХ и состоит из следующих шагов.
1. По заданным значениям показателей качества переходного процесса
t p , ручным или машинным способом строится желаемая ЛАХ LЖ ( ) , которая изображается на графике ЛАХ нескорректированной системы LН ( ) .
а) Построение ЛАХ в области средних частот:
Определяется желаемая частота среза ср ж по заданным значениям показателей качества переходного процесса t p , с помощью изображенных на
рис.1.102 номограмм tpcp ( Pmax / P0 ) , и ( Pmax / P0 ) , где Pmax / P0 выполняет роль
вспомогательного параметра ( Pmax и P0 – максимальное и начальное значение
вещественной частотной характеристики замкнутой системы [9]). Здесь по желаемому перерегулированию , % по стрелке находим аргумент Pmax / P0 и соответствующее ему произведение tpcp . Отсюда по заданному значению t p
находим cpж .
175
Рис. 1.102
По дополнительным номограммам З ( Pmax / P0 ) и L1, L2 ( Pmax / P0 ) оцениваются запас устойчивости по фазе З и минимальные положительные значения краевых амплитуд L1 LЖ (с ) , L2 | LЖ (в ) | , по которым определяются
границы среднечастотного диапазона.
Через точку cp ж проводится отрезок ЛАХ с наклоном 20 дБ/дек, у которого слева от cp ж значение LЖ (с ) L1 , а справа LЖ (в ) L2 . Тем самым
определяется среднечастотный диапазон с в желаемой ЛАХ, где
L
1
с 10 20 срж ,
L2
в 10 20 срж ,
или
lg с lg срж L1 / 20 , lg в lg срж L2 / 20 .
Для обеспечения достаточного запаса устойчивости ширина среднечастотного диапазона должна быть не менее декады, а частота среза располагаться примерно в его середине. Дальнейшее построение желаемой ЛАХ в области
176
низких и высоких частот должно проводится таким образом, чтобы для реальных запасов устойчивости по амплитуде L*1 , L*2 и фазе З* выполнялись условия
L*1 L1 , L*2 L2 , З* З , которые обеспечивают заданные показатели качества
tp , .
б) Построение ЛАХ в области низких частот:
Сопрягается среднечастотный участок LЖ ( ) с низкочастотным участком LН ( ) нескорректированной системы с помощью сопрягающей части, т.е.
отрезка прямой в интервале частот н с при LЖ (н ) LН (н ) , наклон
которого не должен отличаться от наклона LН ( ) в этой области частот более,
чем на 20 или 40 дБ/дек. Сопряжение горизонтальным участком длиной более половины декады нежелательно, т.к. оно затягивает переходной процесс.
Иногда для сопряжения используется более чем один отрезок, что усложняет
схему корректирующего устройства.
Значение н не должно быть меньше значения сопрягающих частот характеристики LН ( ) , постоянные времени которых соответствуют корням полиномов mН ( p ) , d Н ( p ) в разложении передаточной функции WН ( p ) на множители.
в) Построение ЛАХ в области высоких частот:
Построение высокочастотного участка LЖ ( ) проводится из условия получения наиболее простого корректирующего устройства. Для этого необходимо, чтобы вправо от частоты в желаемая ЛАХ имела наклоны равные наклонам LН ( ) или отличные от них, не более чем на 20 или 40 дБ/дек, при этом
наклоны последних участков должны быть равны наклонам LН ( ) .
2. По виду желаемой ЛАХ восстанавливается передаточная функция
WЖ ( p ) , у которой коэффициент усиления разомкнутой системы равен k раз не-
скорректированной системы. Последовательность восстановления передаточной функции WЖ ( p ) по асимптотической ЛАХ LЖ ( ) осуществляется в соответствии с методикой построения ЛАХ по ее передаточной функции, приведенной выше.
3. По передаточной функции WЖ ( p ) строится ЛФХ Ж ( ) и определяются реальные запасы устойчивости по фазе и амплитуде L*1 , L*2 и З* .
177
4. Если L*1 L1 или L*2 L2 , или З* З , то необходимо повторить процедуру синтеза так, чтобы выполнялись условия L*1 L1 , L*2 L2 , З* З .
5. Определяются реальные показатели качества t p* , * полученной
замкнутой системы с передаточной функцией по переходной характеристике
W ( p) 1
hЖ (t ) L1 Ж
.
1 WЖ ( p ) p
6. Если tp* tp , * , то процесс синтеза закончен; в противном случае
необходимо повторить процедуру синтеза так, чтобы увеличить запасы устойчивости L*1 , L*2 и З* .
7. Передаточная функция последовательной коррекции определяется по
формуле WК ( p ) WЖ ( p ) / WН ( p ) или в результате ее восстановления по логарифмической характеристике
LК ( ) LЖ ( ) LН ( ) .
8. По найденной передаточной функции корректирующего устройства
составляется его электрическая схема, которая может быть реализована
различными способами [9]. Наиболее простым является способ реализации с
помощью последовательно соединенных пассивных и активных RC - цепей.
При этом исходная передаточная функция коррекции разбивается на
произведение передаточных функций типовых корректирующих цепей.
Указанное разбиение не является однозначным, поэтому его следует проводить
из условия простоты реализации корректирующего устройства. При этом
необходимо стремиться к тому, чтобы разница в постоянных времени
числителя и знаменателя типовой корректирующей цепи была наименьшей, что
снижает влияние шумов в межкаскадных соединениях.
Для исключения взаимного влияния пассивных корректирующих цепей
между ними устанавливаются операционные усилители с требуемым
коэффициентом усиления или повторители напряжения.
9. Определяется место включения корректирующего устройства с учетом
допустимых входных сигналов.
Отметим, что синтез корректирующего устройства можно проводить
также с использованием показателя колебательности [1].
178
1.8.2.1 Пример синтеза последовательного корректирующего устройства
В качестве примера синтеза последовательного корректирующего
устройства
рассмотрим
следящую
систему
рис.
1.101
с
выбранным
коэффициентом усиления k у на заданный входной сигнал g (t ) g 0 g1t , где
передаточные функции W1 ( p ) , W f ( p ) соответствуют к двигателю постоянного
тока с усилителем мощности:
kдвf
, W ( p)
;
W1 ( p )
p(Ty p 1)(Tдв p 1)
p(Tдв p 1)
kум kдв
f
W2 ( p ) kр – редуктору, связанного с нагрузкой, Wос ( p ) kос – редуктору
обратной связи.
Тогда
передаточная
функцию
нескорректированной
разомкнутой
системы имеет вид:
WН ( p )
kраз
p(Ty p 1)(Tдв p 1)
,
(1.165)
где kраз kу kум kдв kр kос . В качестве исходных данных примем значения:
kраз 100 , Tдв 0,1с, Ty 0,01 с.
Согласно рассмотренной выше методике, определение передаточной
функции WК ( p ) состоит из следующих шагов.
1. По передаточной функции (1.165) строится ее асимптотическая ЛАХ
LН ( ) (рис. 1.103), в виде суммы асимптотических ЛАХ типовых звеньев с
учетом сопрягающих частот 1 1 / Tдв =10 рад/с, 2 1 / Tу =100 рад/с.
Для построения точной ЛАХ LН ( ) и ЛФХ Н ( ) можно воспользоваться программой, составленной в Script-файле:
kpas=100;Ty=0.01;Tdv=0.1;%Исходные данные.
%Передаточная функция Wн(p);
Wn=tf([kpas],[Ty 1])*tf([1],[Tdv 1 0])
figure(1);margin(Wn);grid %Построение ЛАХ и ЛФХ для Wн(p);
%Вычисление корней характеристического уравнения 1+Wн(p)=0:
p=esort(tzero(1+Wn))
%Построение переходной характеристики замкнутой
%нескорректированной системы
179
Wz=feedback(Wn,1); figure(2);step(Wz);grid
180
Результат выполнения программы представлен на рис. 1.104, где указаны
запас по амплитуде 0,828 дБ и фазе 1,58 град.
Рис. 1.104
Также вычисляются корни характеристического уравнения 1 WН ( p ) 0 ,
которые имеют значения: –0,39 j 30,26;
–109,23, и осуществляется построе-
ние переходной характеристики замкнутой системы (рис. 3)
Рис. 1.105
181
Из полученных результатов следует, что нескорректированная система
устойчива, но обладает плохими динамическими свойствами. Поэтому в системе необходимо использовать корректирующее устройство.
2. Для заданных показателей качества tp* 0,75 С, * 30% определяется
структура передаточной функции WЖ ( p ) . С этой целью проведем факторизацию числителя и знаменателя передаточной функции
WН ( p )
где полином
kраз
d Н+ ( p )d Н ( p )
d Н+ ( p ) (Tдв p 1)(Ty p 1)
,
имеет корни
p1 1/ Tдв 10 ,
p2 1/Ty 100 , для которых время регулирования tp 3/ 3/10 0,3 с, что
меньше заданного значения t p* ; полином d Н ( p ) p имеет корень p1 0 , расположенный на мнимой оси. Тем самым передаточная функция разомкнутой
желаемой системы должна иметь вид
WЖ ( p )
+
mЖ
( p)
,
+
pd Ж
( p)
(1.166)
+
+
( p) и d Ж
( p ) определяются с помощью методигде неизвестные полиномы mЖ
ки построения LЖ ( ) . Сохранение интегрирующего звена в передаточной
функции (1.166), также необходимо для обеспечения астатизма системы к
входному сигналу g 0 .
а) Построение ЛАХ в области средних частот:
С помощью номограмм рис. 1.102 определяем желаемую частоту среза
срж 3,8 / tp* для * 30%. Тем самым находим срж 15,9 и lg срж 1,2 .
На рис.1.103 через точку cpж проводим отрезок ЛАХ с наклоном
20 дБ/дек, у которого слева от cpж
значение
Lж (4 ) L*1 , а справа
Lж (2 ) L*2 , где L*1 , L*2 15 дБ. Тем самым определяется среднечастотный
диапазон 4 2 .
б) Построение ЛАХ в области низких частот:
182
Проводим сопряжение среднечастотного участка LЖ ( ) с низкочастотным участком LН ( ) нескорректированной системы с помощью сопрягающей
части, т.е. отрезка прямой в интервале частот 3 4 при LЖ (3 ) LН (3 )
с наклоном 60 дБ/дек. При этом желаемая передаточная функция будет иметь
вид (1.165), у которой коэффициент усиления равен k раз нескорректированной
системы.
в) Построение ЛАХ в области высоких частот:
Построим высокочастотный участок LЖ ( ) из условия получения наиболее простого корректирующего устройства. Для этого необходимо, чтобы вправо от частоты 2 желаемая ЛАХ имела наклон равный наклону LН ( ) .
Результат построения асимптотической ЛАХ LЖ ( ) представлен на
рис.1, где 3 1 , 4 2,5 , 2 100 .
3. По виду желаемой ЛАХ восстанавливается передаточная функция
WЖ ( p )
kраз (T4 p 1)2
p(T3 p 1)2 (Ty p 1)2
,
где T3 1/ 3 1с, T4 1/ 4 0,4 с.
4. По передаточной функции WЖ ( p ) строятся ее точные ЛАХ и ЛФХ
Ж ( ) (рис. 1.106) и определяются запасы устойчивости по фазе и амплитуде:
L2 21,4 дБ и З 61,2 град, т.е. обеспечиваются желаемые запасы: L2 15 дБ,
З 60 град.
183
Рис. 1.106
5. Определяются показатели качества t p ,
полученной замкнутой
системы по переходной характеристике hж (t ) , представленной на рис. 1.107, из
которой следует, что tp 0,5 с, 15 %, т.е. выполняются заданные показатели
качества.
Рис. 1.107
6. Поскольку tp* tp , * , то процесс синтеза закончен.
7. Определяется передаточная функция последовательной коррекции по
184
формуле WК ( p ) WЖ ( p ) / WН ( p ) или с помощью ее логарифмической характеристики Lк ( ) Lж ( ) Lн ( ) , представленной на рис. 1, по виду которой восстанавливается передаточная функция WК ( p ) :
WК ( p )
(T4 p 1)2 (Tдв p 1)
(T3 p 1)2 (Ty p 1)
.
(1.167)
Таким образом, найдена структура и параметры передаточной функции
корректирующего устройства.
8. По найденной передаточной функции корректирующего устройства
составляется его электрическая схема. Для этого передаточную функцию
(1.167) представим в виде произведения двух передаточных функций:
WК ( p )
(T4 p 1)(Tдв p 1) (T4 p 1)
.
(T3 p 1)(Ty p 1) (T3 p 1)
Поскольку T3 T4 Tдв Ty , то для реализации первой передаточной
функции можно использовать интегро-дифференцирующую цепь постоянного
тока. Учитывая, что у второй передаточной функции T3 T4 , используем активную дифференцирующую цепь. Тогда электрическая схема корректирующего
устройства будет иметь вид рис. 1.108, где значения сопротивлений и емкостей
определяются по известным постоянным времени.
Рис. 1.108
9. Включение корректирующего устройства осуществляется после сигнала ошибки с учетом допустимого входного сигнала на операционном усилителе. Если сигнал рассогласования превышает допустимое значение, то его необ-
185
ходимо ослабить и затем соответственно усилить в следующих каскадах усилителей. Если уровень сигнала рассогласования мал, то необходимо сначала усилить сигнал перед корректирующим устройством и затем соответственно ослабить в следующих каскадах усилителей.
Вопросы для самопроверки
1. Какие существуют способы синтеза САР?
2. Какие типовые регуляторы используются в промышленности?
3. В каком случае нельзя обеспечить устойчивость замкнутой системы с ПИДрегулятором?
4. Каким образом определяются параметры ПИД-регулятора с помощью интегральных оценок?
5. Какие используются схемы реализации ПИД-регуляторов?
6. За счет чего в замкнутой системе обеспечивается заданная установившаяся
ошибка?
7. В чем смысл методики синтеза последовательного корректирующего устройства?
8. От чего зависит желаемая частота среза?
9. Каким образом определяется передаточная функция корректирующего
устройства с помощью ЛЧХ?
10. Как определяется электрическая схема корректирующего устройства по его
передаточной функции?
1.8.3. Синтез параллельного корректирующего устройства
Недостатком последовательной коррекции является чувствительность
показателей качества к изменению параметров системы. Для устранения этого
недостатка может быть использовано параллельно-встречное корректирующее
устройство, представленное на рис. 1.109 передаточной функцией WК1 ( p ) .
186
Рис. 1.109
Рис. 1.110
Данное корректирующее устройство охватывает обратной связью элемент прямой цепи с передаточной функцией W2 ( p ) , у которой параметры могут изменяться. Передаточная функция участка цепи с параллельным корректирующим устройством имеет вид
W2 ( p )
W2 ( p )
1 WК1 ( p )W2 ( p )
Обычно в достаточно широком и существенном для качества системы
диапазоне частот справедливо неравенство
| WК1 ( j )W2 ( j ) | 1
(1.168)
Тогда в этом диапазоне частот справедливо приближенное равенство
W2 ( j )
1
.
WК1 ( j )
Таким образом, при выполнении условия (1.168) свойства участка цепи с
параллельным корректирующим устройством определяются только лишь свойствами этого корректирующего устройства, т.е. изменение параметров передаточной функции W2 ( p ) практически не влияет на качество системы.
Другое достоинство данного корректирующего устройства заключается в
том, что в качестве устройства с передаточной функцией W2 ( p ) может быть
усилитель мощности или исполнительный элемент с высоким уровнем сигнала,
что облегчает реализацию коррекции.
Для реализации коррекции также используется прямое параллельное корректирующее устройство WК2 ( p ) , приведенное на рис. 1.110. Передаточная
187
функция участка цепи с параллельным корректирующим устройством имеет
вид W2 ( p ) WК2 ( p ) .
Синтез параллельной коррекции проводится по найденной передаточной
функции последовательной коррекции WК ( p ) с желаемой передаточной функцией WЖ ( p ) WК ( p )W1 ( p )W2 ( p)W3 ( p)Wос ( p) разомкнутой системы рис. 1.109 и
рис.1.110.
Затем для схемы рис. 1.109 определяется WК1 ( p ) из уравнения
WК ( p)W1 ( p)W2 ( p)W3 ( p)Wос ( p)
W1 ( p)W2 ( p)W3 ( p)Wос ( p)
,
1 WК1 ( p)W2 ( p)
которое имеет вид
WК1 ( p )
1 WК ( p )
.
WК ( p )W2 ( p )
(1.169)
Соответственно для схемы рис. 1.110 выражение WК2 ( p ) определяется из
уравнения
WК ( p)W1( p)W2 ( p)W3 ( p)Wос ( p) W1( p) W2 ( p) WК2 ( p) W3 ( p)Wос ( p) ,
которое имеет вид
WК2 ( p) WК ( p) 1W2 ( p) .
При реализации коррекции возможно одновременное использование последовательного и параллельного корректирующего устройства.
Недостатком параллельной коррекции является сложность ее реализации.
Например, у передаточной функции (1.169) порядок числителя может оказаться
выше порядка знаменателя, поэтому корректирующее устройство реализуется
приближенно.
1.8.4. Синтез корректирующих устройств по команде и возмущению
В некоторых случаях для целей управления можно использовать не только сигнал ошибки (t ) , но и входной сигнал g (t ) , возмущение f (t ) , если их
удается измерить. В этом случае структура регулятора будет иметь вид
188
рис.1.111, где WК ( p ) – известная передаточная функция, Wкg ( p ) и Wкf ( p ) – неизвестные передаточные функции корректирующих устройств по команде и
возмущению соответственно.
Рис. 1.111
Найдем передаточные функции Wкg ( p ) , Wкf ( p ) , при которых в замкнутой
системе обеспечивается независимость ошибки (t ) от команды g (t ) и возмущения f (t ) . Данное свойство называется инвариантностью системы по входу
и возмущению соответственно.
Запишем выражение ошибки для системы рис. 1.111:
g WосW2 W1 WК Wкg g Wкf f W f f ,
из которого с учетом обозначения Wраз WК W1 W2 Wос найдем
W2 Wос W f W1 Wкf
1 W1 W2 Wос Wкg
g
1 Wраз
1 Wраз
f.
Для выполнения условия 0 , необходимо и достаточно, чтобы выполнялись равенства
1 W1 W2 Wос Wкg 0 ,
W f W1 Wкf 0 .
Отсюда следуют выражения для искомых передаточных функций:
Wкg ( p) 1/ W1( p)W2 ( p)Wос ( p) ,
(1.170)
189
Wкf ( p) W f ( p) / W1( p) .
(1.171)
Необходимо отметить, что условия инвариантности (1.170), (1.171) не зависят от вида WК ( p ) , что позволяет независимо проводить синтез коррекций.
Для следящей системы с учетом выражений передаточных функций
kдвf
, W ( p)
, W2 ( p ) kр , Wос ( p ) kос
W1 ( p )
p(Tдв p 1)(Ty p 1)
p(Tдв p 1)
kум kдв
f
получим
p(Tдв p 1)(Ty p 1)
Wкg ( p )
Wкf
kyм kдв k р kос
( p)
kдвf (Ty p 1)
kyм kдв
,
.
(1.172)
(1.173)
Из выражений (1.172), (1.173) следует, что порядок числителя превышает
порядок знаменателя передаточной функции, т.е. данные передаточные функции физически нереализуемы. В тоже время, если в (1.173) пренебречь малой
постоянной времени Ty , то Wкf ( p ) kдвf / ( kyм kдв ) является коэффициентом передачи.
Таким образом, добиться полной компенсации воздействий g (t ) и f (t )
не удается. Однако можно существенно снизить влияние данных воздействий
за счет приближенных коррекций с малой постоянной времени T :
Wкg ( p )
Wкf
( p)
p(Tдв p 1)(Ty p 1)
kyм kдв kр kос (Tp 1)3
kдвf (Ty p 1)
kyм kдв (Tp 1)
.
,
(1.174)
(1.175)
В этом случае ЛАХ передаточных функций (1.172), (1.173) и (1.174),
(1.175) будут отличаться только в области высоких частот: в окрестности частоты среза 1 1/T и выше. Тем самым, частота входных воздействий g (t ) и
f (t ) должна быть существенно ниже частоты 1 .
190
Вопросы для самопроверки
1. В чем преимущество и недостаток параллельно-встречного корректирующего устройства?
2. Как осуществляется синтез параллельных корректирующих устройств?
3. Что понимается под инвариантностью САР?
4. Как определяются передаточные функции корректирующих устройств по
команде и возмущению?
5. Всегда ли возможно добиться инвариантности системы по команде и возмущению?
6. Какие передаточные функции являются физически нереализуемыми?
7. При каких условиях удается добиться приближенной инвариантности?
1.8.5. Синтез управления в пространстве состояний
Наряду с частотными методами синтеза управления также широко используются методы синтеза САУ с использованием переменных состояния.
При этом объект управления представляется системой дифференциальных
уравнений
x Ax bu,
y cT x,
(1.176)
где x(t ) – n - вектор состояния, u (t ) – управляющий сигнал, y(t ) – выход. В отличие от физических сигналов входа и выхода системы, вектор состояния в общем случае может не иметь физического смысла. Тем не менее, представление
системы в пространстве состояний позволяет формализовать задачи анализа и
синтеза САУ и повысить точность их расчета на ЭВМ для систем высокого порядка ( n 10 ) за счет использования численно устойчивых алгоритмов.
1.8.5.1. Синтез управления при полном измерении
Рассмотрим случай, когда все координаты вектора x(t ) имеют физический смысл и доступны измерению. Структурная схема замкнутой системы
стабилизации при отсутствии возмущающего воздействия представлена на рис.
191
1.112.
Рис. 1.112
Будем считать, что на вход системы поступает известный постоянный
сигнал g (t ) g 0 , измерению доступен сигнал выхода y(t ) . Тогда сигнал рассогласования (t ) g 0 y (t ) является измеряемым.
Закон управления формируется в виде:
u k0 k T x k0 g 0 y (t ) k T x
k0 g 0 cT x(t ) k T x k0 g 0 k T k0cT x r T x k0 g 0 ,
(1.177)
где r T k T k0cT .
Тогда замкнутую систему можно записать в виде:
x Ax b r T x k0 g0 A br T x bk0 g0 A*x bk0 g0 ,
(1.178)
где матрица A* A brT .
Требуется определить коэффициент k0 , вектор коэффициентов k , при которых в замкнутой системе (1.178) обеспечивается требуемое качество переходных процессов выхода y(t ) и выполняется условие уст 0 .
Также как при синтезе последовательной коррекции, процедура синтеза
состоит из двух этапов: статического и динамического расчета.
1. Статический расчет
Найдем коэффициент k0 при котором в замкнутой системе выполняется
условие уст 0 . Поскольку установившийся процесс достигается в устойчивой
системе, то предположим, что найдется вектор коэффициентов r T , при котором
192
матрица A* будет устойчивой, то есть корни pi* , i 1, n характеристического
уравнения
| pEn A* | p n a1* p n1
an* 0
(1.179)
имеют отрицательные вещественные части.
Учитывая, что для определителя матрицы выполняется равенство
| A* | (1)n p1* p2*
pn* ,
и отсутствуют нулевые корни, то | A* | 0 , и существует обратная матрица A*1 .
В установившемся режиме при x 0 получим уравнение
0 A* xуст bk0 g0 ,
(1.180)
из которого найдем
xуст A*1bk0 g0 .
Тогда выражение установившейся ошибки имеет вид
уст g0 cT xуст 1 cT A*1bk0 g0 ,
из которого при уст 0 найдем искомый коэффициент
k0 1/ cT A*1b ,
(1.181)
где A* A brT , вектор коэффициентов r T определяется ниже.
Таким образом, с помощью закона управления (1.177) удается обеспечить
астатизм системы к постоянному входному сигналу g . Это возможно, если
разомкнутая система содержит интегрирующее звено, то есть харакетристическоеуравнение разомкнутой системы
| pEn ( A bk T ) | 0 .
имеет нулевой корень. В этом случае должно выполняться равенство
| A bk T | 0 . Действительно, можно записать
| A bk T || A br T k0bcT || A* k0bcT |
| ( I n k0bcT A*1 ) A* || I n k0bcT A*1 || A* | .
Учитывая, что | A | 0 , с учетом свойства (1.77) и выражения (1.181) по*
193
лучим
| I n k0bcT A*1 | 1 k0cT A*1b 0 ,
что подтверждает наличие нулевого корня у характеристического уравнения
разомкнутой системы.
Недостатком в данном случае является то, что точность реализации астатизма системы зависит от точности определения параметров ОУ. В случае, когда передаточная функция ОУ содержит интегрирующее звено, астатизм системы не зависит от точности определения параметров ОУ.
2. Динамический расчет
Найдем вектор коэффициентов r T , при котором переходной процесс выхода y(t ) имеет заданное время регулирования t p* и перерегулирование * .
Для обеспечения прямых показателей качества tp tp* , * , будем использовать косвенные алгебраические показатели качества: распределение желаемых корней характеристического уравнения (1.179) на комплексной плоскости (см. подраздел 1.7.2.1).
В качестве варианта задания желаемых корней характеристического
уравнения (1.179) можно использовать, например, вещественные кратные корни, которым соответствует характеристическое уравнение
p n p n a1* p n1
an*1 p an* 0 .
Здесь множители коэффициентов ai* , i 1, n определяются c помощью треугольника Паскаля:
n=1
n=2
n=3
n=4
1
1 2 1
1 3 3 1
1 4 6 4 1
Например, для
n4
коэффициенты
определяются выражениями:
a1* 4 , a2* 6 2 , a3* 4 3 , a4* 4 .
Значение выбирается по заданному времени регулирования: / tp ,
194
где значения коэффициента определяются из таблицы 1.3
Таблица 1.3
n
1
2
3
4
5
6
3
4,8
6,3
7,8
9,2
10,5
При выборе кратных корней переходной процесс по выходу y(t ) , как
правило, имеет минимальное перерегулирование.
Для определения вектора r T введем отклонение x x xуст и, вычитая
из уравнения (1.178) уравнение (1.180), получим уравнение в отклонении от
установившегося режима:
x A br T x ,
(1.182)
с начальным условием x(0) x(0) xуст .
С помощью матрицы преобразования S , | S | 0 запишем выражение
S 1 A br T S S 1 AS S 1br T S A br T ,
где A S 1 AS , b S 1b , r T r T S . Отсюда справедливы также выражения
A SAS 1 ,
b Sb ,
r T r T S 1 .
Найдем характеристическое уравнение
| pEn A | p n a1 p n1
an 0
и будем строить матрицу преобразования S так, чтобы матрица A и вектор b
имели вид:
0
0
A
0
an
1
0
0
1
0
0
an1 an2
0
0
0
0
, b .
1
0
1
a1
Здесь коэффициенты ai , i 1, n также являются коэффициентами характери-
195
стического уравнения | pEn A | 0 , поскольку выполняется равенство
| pEn A || pEn SAS 1 || S ( pEn A) S 1 || S | | pEn A | | S 1 || pEn A | .
Для определения матрицы преобразования S используем матрицу управляемости U [b Ab ... An1b] . Учитывая свойство Ai SAi S 1 , получим вектора
~
b Sb , Ab SAS 1Sb SAb ,…., Aib SAi S 1Sb SAib ,…, An1b SAn1b ,
из которых сформируем матрицу U в виде:
U [ Sb SAb ... SAn1b ] S[b Ab ... An1b ] SU .
Отсюда найдем матрицу
~
S UU 1 ,
~
которая является неособой при | U | 0 , | U | 0 .
~
~
Условие | U | 0 всегда выполняется в силу структуры матрицы U , что
легко проверяется. Например, для системы 2-го порядка получим
0
A
a2
1
,
a1
0
b ,
1
U b
0 1 ,
Ab
1 a1
| U | 1.
Поэтому если | U | 0 , то есть ранг матрицы rank (U ) n , то существует
неособая матрица преобразования S . В этом случае говорят, что система
(1.176) является полностью управляемой, а матрица U называется матрицей
управляемости.
Для вектора коэффициентов r T [rn , ... , r1 ] получим матрицу
0
0
~ * ~ ~~ T
A A br
0
an*
1
0
0
1
0
0
an* 1 an* 2
0
0
,
1
a1*
где коэффициенты ai* определяются по формулам ai* ai ri , i 1, n .
Матрице A* соответствует характеристическое уравнение
196
| pEn A* | p n a1* p n1
an*1 p an* 0 .
(1.183)
Отсюда следует, что если задать желаемые коэффициенты ai* , i 1, n , которым соответствуют желаемые корни замкнутой системы pi* , i 1, n , то можно найти соответствующие коэффициенты ri ai ai* , i 1, n .
Таким образом, условие управляемости системы означает возможность назначения с помощью обратной связи произвольных корней характеристического уравнения замкнутой системы.
С помощью обратного преобразования искомый вектор r определяется
по формуле
r T r T S 1 .
(1.184)
По найденным значениям k0 , r T определяется вектор k T r T k0cT .
1.8.5.2. Синтез управления с учетом динамики исполнительного
устройства
На практике часто встречается задача синтеза управления системой с исполнительным устройством (ИУ), собственное движение которого протекает
значительно быстрее, чем собственное движение объекта управления (ОУ). При
этом быстродействие ИУ выше, чем требуемое быстродействие замкнутой системы. В этом случае нет необходимости (или нежелательно) использовать в
законе управления координаты состояния ИУ. Однако неучтенная динамика
ИУ может приводить к ухудшению качества переходного процесса регулируемой координаты ОУ. Поэтому возникает задача синтеза закона управления с
учетом динамики ИУ.
Уравнения динамики системы с выделенным ИУ можно представить в
виде двух подсистем:
x Ax b ,
y cT x,
(1.185)
где x –n- вектор состояния ОУ полностью измеряемый, y – регулируемая координата ОУ, – не измеряемый выход исполнительного устройства;
197
z Pz du,
(1.186)
hT z,
где z – m - вектор состояния исполнительного устройства недоступный для измерения, P –матрица с большим запасом устойчивости.
Также как в подразделе 1.8.5.1 будем считать, что на вход системы поступает известный постоянный сигнал g (t ) g 0 , измерению доступен сигнал
выхода y(t ) . Тогда сигнал рассогласования (t ) g 0 y (t ) является измеряемым.
Закон управления формируется по измеряемым координатам в виде:
u k0 k T x k0 g 0 y (t ) k T x
k0 g 0 cT x(t ) k T x k0 g 0 k T k0cT x r T x k0 g 0 ,
(1.187)
где r T k T k0cT .
Структурная схема замкнутой системы (1.185) - (1.187) представлена на
рис. 1.113.
Требуется определить коэффициент k0 , вектор коэффициентов k , при которых в замкнутой системе обеспечивается требуемое качество переходных
процессов выхода y(t ) и выполняется условие уст 0 .
Рис. 1.113
Процедура синтеза состоит из двух этапов: статического и динамического
расчета.
1. Статический расчет
Найдем коэффициент k0 при котором в замкнутой системе выполняется
условие уст 0 . Для этого рассмотрим установившийся режим при x 0 ,
198
z 0.
Тогда из уравнений (1.185) - (1.187) получим уравнения
0 Axуст bhT zуст ,
(1.188)
0 Pzуст d r T xуст k0 g0 .
(1.189)
Из уравнения (1.189) найдем выражение
zуст P 1d r T xуст k0 g0 ,
которое подставим в уравнение (1.188). В результате получим уравнение
0 Axуст bhT P 1d r T xуст k0 g0 ,
из которого найдем
xуст A bhT P 1drT
1
bhT P 1dk0 g0 .
Тогда выражение установившейся ошибки имеет вид
уст g0 cT xуст 1 cT A bhT P 1dr T
1
bhT P 1dk0 g0 ,
из которого при уст 0 найдем искомый коэффициент
k0
T
c
A bh P
T
1
1
dr
T
1
T
1
,
bh P d
(1.190)
где вектор коэффициентов r T определяется ниже.
2. Динамический расчет
Найдем вектор коэффициентов r T , при котором переходной процесс выхода y(t ) имеет заданное время регулирования t p* и перерегулирование * .
Для обеспечения прямых показателей качества tp tp* , * , будем использовать косвенные алгебраические показатели качества: распределение желаемых корней характеристического уравнения замкнутой системы на комплексной плоскости.
С помощью преобразования Лапласа при нулевых начальных условиях
199
уравнения (1.185), (1.186) представим в операторном виде:
1
x pEn A b ,
1
hT pEm P d r T x k0 g0 .
Введем обозначения передаточной функции ОУ
1
W ( p, r ) r T pEn A b ,
зависящей от вектора r , и передаточной функции ИУ
1
Wиу ( p ) hT pEm P d .
Тогда получим уравнение замкнутой системы относительно переменной :
Wиу ( p) W ( p, r ) k0 g 0
или
1 Wиу ( p)W ( p, r ) Wиу ( p)k0 g 0 ,
(1.191)
с характеристическим уравнением
1 Wиу ( p)W ( p, r ) 0 ,
(1.192)
или
1
W ( p, r ) Wиу
( p)
Отсюда получим уравнение относительно вектора коэффициентов
1
1
r T pEn A b Wиу
( p) .
При подстановке в данное уравнение желаемых значений корней pi* ,
i 1, n , получим систему линейных уравнений:
r T p1*En A
r T pn* En A
1
1
b Wиу1 ( p1* ),
b Wиу1 ( pn* ),
относительно неизвестного вектора r T .
Данную систему можно представить в матричной форме:
1 *
rT M Wиу
( p1 )
1 *
Wиу
( pn )
200
где
M p1*En A
1
b
pn* En A
1
b .
Здесь предполагается, что для различных корней pi* , i 1, n выполняется условия Wиу ( p1* ) 0 и матрица M неособая.
Тогда вектор r T определяется по формуле
1 *
rT Wиу
( p1 )
1 *
Wиу
( pn ) M 1 .
(1.193)
По найденным значениям k0 , r T определяется вектор k T r T k0cT .
Для проверки прямых показателей качества переходного процесса по выходу y(t ) , систему уравнений (1.185) - (1.187) с помощью расширенного вектора состояния xTp xT
zT можно записать в виде
x p Ap x p bp g0 ,
(1.194)
y cTp x p ,
где
A
Ap
T
dr
bhT
0 21
, cTp сT
, bp
P
dk0
01m .
Систему (1.194) необходимо проинтегрировать и построить переходной
процесс по выходу y(t ) . При этом корни характеристического уравнения замкнутой системы определяются из уравнения
D( p, r ) | pEnm Ap | p nm a1* p nm1 a2* p nm2 ... an*m1 0 ,
(1.195)
где a1* tr ( Ap ) – след матрицы, который зависит от корней pi* i* j i*
уравнения (1.195):
tr ( Ap )
n m
i* ,
i 1
(1.196)
201
Таким образом, коэффициент a1* , который должен быть положительным
для устойчивости системы, не зависит от коэффициентов вектора r , то есть
«центр масс» корней характеристического уравнения (1.195) не изменяется при
любых значениях вектора коэффициентов r . Иначе говоря, с помощью коэффициентов обратной связи сдвигаются влево n корней характеристического
уравнения замкнутой системы, а оставшиеся m корней, связанные с ИУ, сдвигаются вправо. Учитывая большой запас устойчивости корней характеристического уравнения ИУ, можно обеспечить запас устойчивости замкнутой системы.
Если принять i* , i 1, n m , где неточное равенство исключает вырожденность матрицы M , из формулы (1.196) найдем оценку наибольшего запаса устойчивости замкнутой системы
max tr ( Ap ) / (n m) .
(1.197)
Таким образом, для обеспечения заданного времени регулирования t p
необходимо по таблице 1.3 для порядка n m определить коэффициент , по
которому определяется необходимый запас устойчивости / t p , который
должен удовлетворять неравенству max . При этом корни pi* должны удовлетворять неравенствам
Re pi* max , i 1, n .
(1.198)
Если неравенство (1.198) не выполняется, то следует увеличить времени
регулирования t p .
Пример 1.32. Рассмотрим систему (1.185), (1.186) при n 2 , m 2 с матрицами
0 1
0 T
,
b
A
1 , c [1 0] ,
1 0
1
0
0
, d , hT [1 0] .
P
100 14,14
1
Требуется найти управление (1.187) с коэффициентом k0 и вектором ко-
202
эффициентов k , при которых в замкнутой системе обеспечивается требуемое
качество переходных процессов выхода y(t ) с временем регулирования
tp 1,6 c и выполняется условие уст 0 .
Решение: Отметим, что корни характеристического уравнения ОУ
| pEn A | p 2 1 0
имеют значения p1,2 j , а корни характеристического уравнения ИУ
| pEm P | p 2 14,14 p 100 0
имеют значения p1,2 7,07 j 7,072 , то есть ИУ обладает большим быстродействием, чем ОУ. При этом согласно формуле (1.196) получим a1 14,14 и по
формуле (1.197) найдем наибольший запас устойчивости max 3,535 .
По заданному времени регулирования tp 1,6 с, согласно таблице 1.3,
определим запас устойчивости замкнутой системы 4,8 / tp 3 . Тогда неравенству (1.198) соответствуют, например, два различных вещественных корня
p1* 3 , p2* 3,5 .
По формуле (1.193) найдем вектор r T . Для этого вычислим значения
1 *
Wиу
( p1 ) hT
p1*En
1 *
Wиу
( p2 ) hT
p2* En
p E
*
1 n
A
1
0,059
b
,
0,235
P
P
1
1
d 66,58 ,
1
d 62,76 ;
p E
*
2 n
1
A
1
0,047
b
.
0,212
Тогда получим
M p1*En A
1
b
p E
*
2 n
A
1
0,047
0,059
b
,
0,235 0,212
1 *
1 *
rT Wиу
( p1 ) Wиу
( p2 ) M 1 328,82 331,54 .
Корни характеристического уравнения замкнутой системы (1.195) равны
203
p1 3 , p2 3,5 , p3,4 3,82 j5,123 . Тем самым, корни ИУ сдвинулись
вправо, при этом «центр масс» корней характеристического уравнения (1.195)
не изменился.
По формуле (1.190) найдем значение коэффициента k0 428,82 . Тогда
найдем вектор k T 100 331,54 .
Для проведения расчетов и построения переходного процесса воспользуемся программой:
% Программа синтеза управления с учетом инерционности ИУ
n=2; A=[0 1;-1 0]; b=[0;1]; c=[1; 0];
m=2; P=[0 1;-100 -14.14]; d=[0;1]; h=[1; 0];
eig(A)
eig(P)
tp=1.6; % время регулирования
p1=-3; p2=-3.5; % желаемые корни
% Определение вектора rT
M=[inv(p1*eye(n)-A)*b inv(p2*eye(n)-A)*b];
s=[inv(h'*inv(p1*eye(m)-P)*d) inv(h'*inv(p2*eye(m)-P)*d)];
rT=s*inv(M);
% Определение коэффициента k0
k0=1/(c'*inv(A-b*h'*inv(P)*d*rT)*b*h'*inv(P)*d);
kT=rT+k0*c';
% Проверка устойчивости замкнутой системы
Ap=[A b*h';d*rT P]; bp=[zeros(n,1);d*k0]; cp=[c' zeros(1,m)];
eig(Ap)
% Построение переходного процесса выхода y(t)
g0=1; sys=ss(Ap,bp*g0,cp,0); step(sys); grid;
На рис. 1.114 приведен переходной процесс по выходу y(t ) , из которого
следует, что заданные прямые показатели качества замкнутой системы выполнены.
Рис. 1.114
204
1.8.5.2. Синтез управления при неполном измерении
На практике не всегда известна информация о векторе состояния x(t ) ОУ
или обобщенного ОУ, включающего ИУ, в силу трудности измерений или отсутствия физического смысла координат вектора x(t ) . В связи с этим рассмотрим задачу синтеза закона управления для случая, когда измеряются только выходной сигнал y(t ) и управляющий сигнал u (t ) .
Поскольку компоненты вектора x(t ) недоступны для измерения, введем
наблюдающее устройство (НУ), описываемое уравнением
xн Axн bu l ( y cT xн ) ,
(1.199)
где xí (t ) – n -вектор состояния, l – n -вектор параметров выбирается так, чтобы
выполнялось условие xн (t ) x(t ) при t . Если начальные условия вектора
x (0) заранее неизвестны, то принимается xн (0) 0 .
Вычтем из уравнения (1.176) уравнение (1.199), тогда с учетом y cT x и
обозначения x x xн получим
x ( A lcT )x .
(1.200)
Поскольку определитель матрицы равен определителю транспонированной матрицы, то выполняется равенство
| pEn ( A lcT ) || pEn ( AT cl T ) |
и, следовательно, вектор параметров l , назначающий желаемые корни характеристического уравнения
| pEn ( AT cl T ) | 0 ,
(1.201)
можно найти по приведенной выше методике, заменяя соответственно матрицу
A на AT , вектор b на c , вектор r на l , матрицу управляемости U на матрицу
N T [c AT c...( AT ) n1 c] ,
которая называется матрицей наблюдаемости системы (1.176). При этом задача синтеза имеет решение, если определитель | N T | 0 .
205
Таким образом, наблюдаемость системы означает возможность восстановления вектора состояния система за конечное время с заданной точностью.
Итак, для решения поставленной задачи необходимо выполнение условий
управляемости, наблюдаемости исходной системы (1.176).
Закон управления будем формировать в виде
u k0 k T xн ,
(1.202)
заменяя в исходном законе управления (1.177) вектор x(t ) на его оценку xн (t ) .
Структурная схема закона управления представлена на рис. 1.115. где
наблюдающее устройство описывается уравнением (1.199).
Рис. 1.115
Исходную систему (1.176), замкнутую управлением (1.202), можно представить в виде
x Ax b k0 g 0 cT x k T xн x x
(1.203)
( A br ) x bk0 g 0 bk x.
T
T
Учитывая, что x(t ) 0 при t , то в силу устойчивости системы (1.203)
решение x(t ) будет стремиться к установившемуся значению xуст , при котором
уст 0 .
Таким образом, для системы (1.176) определение параметров k 0 , k T и
вектора l .проводится независимо
Если вектор l выбрать так, чтобы корни pнi , i 1, n характеристического
уравнения (1.201) были левее корней pi* , i 1, n уравнения (1.183), то переход-
206
ной процесс системы (1.200) протекает быстрее, чем для вектора x(t ) и, следовательно, при x(t ) 0 выполняется условие xн (t ) x(t ) .
Если корни характеристического уравнения (1.200) по вещественной части сравнимы с корнями pi* , i 1, n уравнения (1.183), то за время переходного
процесса не удается оценить вектор x(t ) и в этом случае наблюдающее устройство является только корректирующим устройством.
Поскольку координата y(t ) измеряется, то размерность НУ может быть
понижена на один порядок.
Закон управления (1.199), (1.202) можно представим с помощью передаточных функций. Действительно, с помощью преобразования Лапласа уравнения (1.199) при нулевых начальных условиях получим
X н ( p) pEn ( A lcT )
1
bU ( p) lY ( p) .
Тогда закон управления (1.202) с учетом выражения y (t ) g (t ) (t ) можно
представить в виде
U ( p) k0 E ( p) k T pEn ( A lcT )
1
bU ( p) l[G( p) E ( p)] .
Отсюда следует выражение
U ( p ) WК ( p ) E ( p ) Wкg ( p )G( p ) ,
(1.204)
где
WК ( p )
k0 k T pEn ( A lcT )
1 k
T
pE
( A lc )
T
n
1
1
l
b
, Wкg ( p )
k T pEn ( A lcT )
1 k
T
pE
n
1
( A lc )
T
l
1
.
b
Согласно выражению (1.204) закон управления (1.199), (1.202) может
быть реализован с помощью корректирующих устройств по ошибке и команде.
При этом порядок числителя и знаменателя передаточных функций равен n ,
что в некоторых случаях значительно выше, чем в ранее рассмотренных корректирующих устройствах. Однако данный метод синтеза можно использовать
для многомерных систем, представленных уравнением вида
207
x Ax Bu,
y Cx,
(1.205)
где A n n , B n m , C l n – матрицы. При этом решение задачи синтеза
системы (1.205) проводится аналогично с заменой векторов b , cT на матрицы
B , C соответственно. Основная сложность рассмотренного метода связана с
заданием желаемых корней характеристического уравнения замкнутой системы. Здесь необходимо руководствоваться следующим правилом. Сначала необходимо определить корни уравнения | pEn A | 0 и выделить из них корни с
большим запасом устойчивости, которые необходимо включить в состав желаемых корней замкнутой системы. Физически это означает, что в системе имеются быстро затухающие движения, связанные с быстродействующими устройствами, для которых не требуется коррекция движения.
Для определения управляемости системы функция U=ctrb(A,B) формирует для пары матриц A n n , B n m матрицу управляемости
U [ B AB ... An1B] ,
размером n строк и n m столбцов. Система является управляемой, если матрица управляемости имеет полный ранг, равный n, который вычисляется с помощью команды rank(U).
Функция N=obsv(A,C) с помощью матрицы C l n формирует матрицу наблюдаемости
N T [C T ATC T ... (AT )n1C T ]
размерностью n строк и n l столбцов. Система наблюдаема, если матрица N
имеет полный ранг.
Для синтеза управления рассмотренным методом, который называется
методом модального управления, используются функции acker, place, reg и
estim, входящих в пакет прикладных программ Control System Toolbox.
Пример 1.33. Рассмотрим систему (1.176) второго порядка с матрицами
208
0,6 0,7
0 T
,
A
b
1 , c [1 0] .
0.01
0
Зададим корни уравнения (1.183) p1* 2 , p2* 2,5 и уравнения (1.200)
p1н 6 , p2н 7 .
Синтез закона управления проведем с помощью программы составленной
в Script-файле:
% Исходные данные
n=2; A0=[-0.6 0.7;0 0]; b0=[0;1]; c=[1 0]; g0=1; x0=[-1;0];
p(1)=-3; p(2)=-3.5;% желаемые корни эталонной модели
pn(1)=-6; pn(2)=-7;% желаемые корни эталонной модели НУ
% Синтез управления при полном измерении
r=-place(A0,b0,p);% синтез вектора r по корням p
% Синтез управления при неполном измерении
l=-place(A0',-c',pn)% синтез вектора l по корням pn
k0=-1/(c*inv(A0+b0*r)*b0);k=r+k0*c;
disp('Результаты');k0,k,l
В
результате
выполнения
программы
получим
значения:
k [5,06 5,9] , k0 15 , l [12,4 60] , для которых на рис. 1.116 и рис.1.117
приведены переходные процессы замкнутой системы (1.176), (1.185), (1.188)
при g 0 1 , x(0) [1 0]T . При этом в законе управления (1.202) принято значение xн1 y .
Из переходных процессов следует, что при t 1 с выполняется условие
xн2 (t ) x2 (t ) и выход y(t ) стремится к заданному значению.
Рис. 1.116
Рис. 1.117
209
1.8.6. Синтез управления при наличии возмущений
Рассмотренную методику синтеза управления можно использовать для
систем с учетом неизвестных внешних воздействий. Внешние возмущения
можно разделить на регулярные и нерегулярные возмущения. Регулярные возмущения с заданной точностью представляются в виде решения однородных
дифференциальных уравнений при неопределенных начальных условиях, а
ограниченные нерегулярные возмущения описываются с помощью неравенств.
1.8.6.1. Случай регулярных внешних воздействий
Рассмотрим случай регулярных внешних воздействий для системы вида
x Ax bu d f ,
y cT x,
(1.206)
где f (t ) – неизвестное внешнее воздействие, которое можно представить в виде f (t ) hT (t ) , где (t ) s - вектор решения дифференциального уравнения
à , (0) 0 ,
(1.207)
с неизвестным начальным условием 0 .
Например, постоянному воздействию f (t ) f 0 соответствует уравнение
0 , 0 f 0 . Линейно нарастающему воздействию f (t ) f 0 f1t соответствуют уравнения 1 2 , 2 0 , f (t ) 1 (t ) , 10 f 0 , 20 f1 и матрицы
0 1
, hT [1 0] . Гармоническому воздействию f (t ) f 0 sin t соответÃ
0 0
ствуют уравнения 1 2 , 2 21 , f (t ) 1 (t ) , 10 0 , 20 f 0 и матрицы
1 T
0
à 2
, h [1 0] .
0
Уравнения (1.206), (1.207) запишем в виде одного уравнения:
xp Ap xp bpu,
y cpT xp ,
(1.208)
210
A dhT
где xp ( x , ) – (n s) - расширенный вектор состояния, Ap
–
0
Ã
T
T T
b
(n s) (n s) -матрица, bp – (n s) -вектор, cpT [cT 0] – (n s) -вектор0
строка.
Для оценки вектора состояния xp используется НУ:
xpн Ap xpн bpu lp ( y cpT xpн ) .
(1.209)
где xрн ( xнT , нT )T – (n s) -вектор состояния. При выполнении условия наблюдаемости системы (1.208) может быть найден вектор параметров lp .
Полученную информацию о внешнем воздействии н можно использовать для его компенсации в случае, когда в уравнении (1.206) d b , то есть
точки приложения управления и возмущения совпадают. В этом случае закон
управления ищется в виде
u k0 k T xн hT н .
(1.210)
В этом случае исходную систему (1.206), замкнутую управлением (1.210),
можно представить в виде
x Ax b k0 g0 cT x k T xн x x hT ( н )
( A br ) x bk0 g0 bk x bh .
T
T
(1.211)
T
Учитывая, что x(t ) 0 , (t ) 0 при t , то в силу устойчивости системы (1.211) решение x(t ) будет стремиться к установившемуся значению xуст ,
при котором уст 0 .
Пример 1.34. Для системы, рассмотренной в примере 1.33, проведем синтез управления (1.209), (1.210) при действии гармонического возмущения
f (t ) f 0 sin t .
Зададим корни уравнения (1.183) p1* 2 , p2* 2,5 и НУ p1н 6 ,
p2н 6,5 , p3н 7 , p4н 7,5 . Синтез закона управления проведем с помощью
211
программы составленной в Script-файле:
% Исходные данные
n=2; A0=[-0.6 0.7;0 0]; b0=[0;1]; c=[1 0]; g0=1; x0=[-1;0];
p(1)=-3; p(2)=-3.5;%желаемые корни эталонной модели
% Синтез управления при полном измерении
r=-place(A0,b0,p);% синтез вектора r по корням p
% Синтез управления при неполном измерении
h=[1 0];G=[0 1;-1 0];Ap=[A0 b0*h;zeros(2,2) G];bp=[b0;zeros(2,1)];
cp=[c zeros(1,2)];
pnp(1)=-6; pnp(2)=-6.5;pnp(3)=-7; pnp(4)=-7.5;% желаемые корни НУ
lp=-place(Ap',-cp',pnp)% синтез вектора l по корням pn
k0=-1/(c*inv(A0+b0*r)*b0);k=r+k0*c;
disp('Результаты');k0,k,lp
В результате выполнения программы получим прежние значения k , k 0 и
новый вектор l [26,4 388,2 1706,8 2536,8] . Для полученных значений параметров на рис. 1.117 и рис. 1.118 приведены переходные процессы замкнутой
системы при g 0 1 , f (t ) 2cos t , x(0) [1 0]T .
Рис. 1.118
Рис. 1.119
Для сравнения на рис. 1.118 приведен график 1 с законом управления
(1.210), при котором обеспечивает уст 0 , и для сравнения график 2 с законом
управления u k0 k T xн при отсутствии компенсации возмущения.
Недостатком закона управления (1.210) является зависимость установившейся ошибки от точности модели (1.206) для реального ОУ.
Для устранения этого недостатка строится общая модель для команды
g (t ) hgT и возмущения f (t ) hTf (t ) :
212
à , (0) 0 .
(1.212)
н Aн l , н (0) н0 ,
(1.213)
Вводится НУ вида:
где l – s -вектор параметров, подлежащих определению.
Закон управления формируется в виде
u k1 k2T xд kнT н ,
(1.214)
где xд – n 1 -вектор динамического регулятора
xд Aд xд bд , xд (0) 0 .
(1.215)
Здесь матрица Aд обладает значительным запасом устойчивости, пара ( Aд , bд )
управляема. Например, матрицы Aд , bд можно принять в виде
1
0
0
0
Aд
0
0
n 1 n 2
0
1
0
n 3
0
0
0
0
, bд ,
1
0
1
1
где коэффициенты i , i 1, n 1 соответствуют устойчивому желаемому полиному
d ( p) p n1 1 p n2
n2 p n1 .
С помощью динамического регулятора (1.215) формируется вектор xд с
линейно независимыми координатами, зависящими от сигнала (t ) , тем самым
появляется дополнительная информация для целей управления. Замкнутая система (1.208), (1.213) - (1.215) будет работоспособной, если она является устойчивой при отсутствии воздействий g (t ) , f (t ) . Для обеспечения устойчивости
необходимо выбрать соответствующие значения k1 , k 2 , k н , например, с помощью задания желаемых коэффициентов характеристического уравнения замкнутой системы, порядок которого равен 2n s 1 . При этом число параметров, от которых зависят указанные коэффициенты, равно 2n 2 s 1 , то есть
можно произвольно задать s параметров. Тогда при наличии воздействий g (t ) ,
213
f (t ) в установившемся режиме будет выполняться условие уст 0 для множе-
ства векторов d , не обязательно совпадающих с вектором b , даже при наличии
отклонения параметров реального ОУ от его математической модели (1.206).
Поэтому закон управления (1.213) - (1.215) называют грубым законом управления установившегося движения.
Недостатком данного закона управления также, как и для систем с
наблюдающим устройством, является значительный начальный выброс координат вектора оценок, что приводит к броску управляющего сигнала и в некоторых случаях к увеличению перерегулирования выходной координаты. Поэтому на практике для исключения начального броска в режиме включения системы подключение устройств оценки осуществляется спустя некоторое время,
за которое осуществляется необходимая оценка. В этот промежуток времени
замкнутая система должна быть устойчивой за счет, например, обычного корректирующего устройства. После чего осуществляется переключение на регулятор с устройством оценки и компенсации внешних воздействий.
1.8.6.2. Случай нерегулярных внешних воздействий
Рассмотрим задачу оценки вектора состояния и нерегулярного внешнего,
ограниченного по величине и скорости, для системы, представленной в виде:
x(t ) Ax(t ) Bu(t ) Dw(t , x(t )), x(t0 ) x0 ,
y (t ) Cx(t ),
(1.216)
где x – n - вектор состояния; u – m - вектор управления, y(t ) – l - вектор
измеряемых выходных координат; w(t, x(t )) p - вектор возмущающих воздействий, зависящий в общем случае от вектора состояния x(t ) , ограниченный в
рассматриваемой области фазового пространства вместе с его производной
w(t , x(t )) ; A, B, C , D – постоянные матрицы причем матрицы B , C , D полного
ранга, C , A наблюдаемая пара.
Ставится задача построения наблюдающего устройства для определения
оценки векторов состояния xˆ (t ) и возмущения wˆ (t , x(t )) .
214
Найдем выражение для возмущения из уравнения (1.200):
w(t, x(t )) D x(t ) Ax(t ) Bu(t ) ,
где D DT D
1
(1.217)
DT . Выражение (1.217) в отличие от явной модели внешних
возмущений в виде однородных дифференциальных уравнений можно считать
неявной моделью возмущения.
Рассмотрим два подхода к использованию неявной модели возмущения.
1) Введем приближенную оценку возмущения w(t , x(t )) с помощью выражения
w(t ) (1 )D xˆ(t ) Axˆ(t ) Bu(t ) ,
(1.218)
где 0 – малый параметр, xˆ (t ) – оценка вектора состояния, формируемая
наблюдающим устройством вида:
xˆ(t ) Axˆ(t ) Bu(t ) Dw(t ) L y Cxˆ(t ) ,
(1.219)
где L – матрица коэффициентов, подлежащая определению.
После подстановки правой части уравнения (1.219) в выражение (1.218)
получим выражение
w(t ) (1 ) 1D L y Cxˆ(t ) ,
с учетом которого уравнение (1.219) примет вид
xˆ(t ) Axˆ(t ) Bu(t ) HL y Cxˆ(t ) , xˆ (t0 ) 0 ,
(1.220)
где H En 1 (1 ) DD .
При этом оценку вектора возмущения будем проводить по формуле
wˆ (t ) 1D L y Cxˆ(t ) .
(1.221)
Очевидно, что при произвольном возмущении w(t ) для справедливости
оценки (1.221) необходимо, чтобы rank DT L p . При этом должно выполняться условие l p .
С учетом выражения (1.221) уравнение (1.220) можно переписать в виде
xˆ(t ) Axˆ(t ) Bu(t ) Dwˆ (t )(1 ) L y(t ) Cxˆ(t ) .
(1.222)
215
Вычитая данное уравнение из уравнения (1.216) получим уравнение в отклонениях x(t ) x(t ) xˆ (t ) :
x(t ) A LC x(t ) D w(t , x(t )) (1 )wˆ (t ) ,
(1.223)
или с учетом выражения (1.221)
x(t ) A HLC x(t ) Dw(t , x(t )) .
(1.224)
Из уравнений (1.223), (1.224) следует, что для работоспособности наблюдающего устройства должно выполняться условие асимптотической устойчивости для свободных движений систем с матрицами A LC и A HLC . Тогда с
учетом ограничения возмущения будет ограничено решение x(t ) уравнения
(1.224) и, следовательно, уравнения (1.223), что возможно при ограниченном
векторе w(t ) w(t , x(t )) (1 ) wˆ (t ) . Тем самым при выполнении указанных
условий за счет выбора матрицы L наблюдающее устройство позволяет оценивать вектор внешних возмущений w(t , x(t )) .
2) Рассмотрим второй подход использования модели возмущения (1.217)
в наблюдающем устройстве, когда в качестве приближенной оценки w(t , x(t ))
используется решение wˆ (t ) уравнения
wˆ (t ) wˆ (t ) D xˆ(t ) Axˆ(t ) Bu(t ) L2 y Cxˆ(t ) ,
(1.225)
где – малый параметр, xˆ (t ) – оценка вектора состояния наблюдающего
устройства:
xˆ(t ) Axˆ(t ) Bu(t ) Dwˆ (t ) L1 y Cxˆ(t ) .
(1.226)
С учетом уравнения (1.226) уравнение (1.225) можно переписать в виде
wˆ (t ) 1 D L1 L2
y Cxˆ(t ) .
(1.227)
T
Вводя расширенный вектор xˆ p (t ) xˆT (t ) wˆ (t ) , запишем уравнение
наблюдающего устройства:
xˆ p (t ) Ap xˆ p (t ) B p u(t ) H p L p y C p xˆ p (t ) ,
где приняты обозначения: C p C 0l p ,
(1.228)
216
A
Ap
0 pn
En
D
B
L1
, B (t )
, L p L , H p 1
0 p p p
2
D
0 pm
0n p
.
1E p
При этом уравнение ОУ можно записать в эквивалентном виде
x p (t ) Ap x p (t ) B pu (t ) Dp w ,
T
где x p (t ) xT (t ) w(t ) , D p 0n p
(1.229)
T
I p .
Тогда вычитая уравнение (1.229) из уравнения (1.128) получим уравнение
в отклонениях x p (t ) x p (t ) xˆ p (t ) :
x p (t ) Pp x p (t ) D p w(t ) .
(1.230)
где Pp Ap H p Lp C p .
Из уравнения (1.230) следует, что для работоспособности наблюдающего
устройства должно выполняться условие асимптотической устойчивости для
свободных движений системы с матрицей Pp . Тогда при ограничении скорости
возмущения w(t ) будет ограничено решение x p (t ) .
Для определения матрицы коэффициентов Lp можно воспользоваться
различными методами.
Отметим, что особенностью наблюдающих устройств (1.220), (1.221) и
(1.228) является наличие в данных уравнениях матрицы H и H p , которые в зависимости от значения параметра влияют на точность оценивания внешнего
возмущения.
Пример. 1.35. Рассмотрим систему управления движением центра масс
подвижного объекта. Уравнения динамики системы имеют вид:
mh (t ) a1 (t ) b1 3 (t ) w1(t ) , T (t ) (t ) c1u (t ) w2 (t ) ,
(1.231)
где h – координата центра масс, – отклонение управляющего органа, m, a1 ,
b1 , c1 , T – постоянные параметры. Полагаем, что измерению доступны сигналы
h(t ) , (t ) .
Введем вектор состояния x [h, h, ]T . С помощью приведенных воз-
217
мущений w1 (t ) b1 3 (t ) w1(t ) / m , w2 (t ) w2 (t ) / T , представим нелинейную
систему (1.231) в виде линейной системы (1.216) с матрицами
0 1 0
0
0 0
1 0 0
A(t ) 0 0 a23 , b 0 , C
, D 1 0 ,
0 0 1
0 1
b3
0 0 a33
где a23 a1 / m , a33 1/ T , b3 c1 / T .
За исходные данные примем следующие значения: a23 1 , T 1, b3 1 ,
m 1 , b1 / m 0,3 . В качестве наблюдающего устройства используем систему
(1.228), в которой матрицу коэффициентов L p найдем методом модального
управления. Так, например, по заданным корням s1 3 , s2 3,5 , s3 4 ,
s4 4,5 , s5 5 характеристического уравнения | sI5 Ap LpC p | 0 найдем
матрицу
0
13,5 60,5 0 90
.
Lp
1
5,5 0 10,5
0
Затем, полагая 0,3 , найдем матрицу
E3
H p 1
D
032
0 1 0
,
D
0 0 1 ,
1
E2
которой соответствует матрица Pp с корнями характеристического уравнения
s1,2 0,775 j 6,433 , s3,4 3,25 j 6,54 , s5 11,95 .
Закон управления примем в виде линейной обратной связи. Полагая корни характеристического уравнения | sI3 A BK | 0 равными s1,2,3 1 , получим K 1 3 2 . Тогда закон управления имеет вид:
u (t ) k1x1 (t ) k2 xˆ2 (t ) k3 x3 (t ) .
Результаты моделирования замкнутой системы для заданных внешних
возмущений w1 (t ) 0,1sin t , w2 (t ) sin 2t при x1 (0) 1 , xˆ1 (0) 1 и остальных нулевых начальных значений координат, приведены на рис. 1.120 - 1.122.
На рис. 1.120 представлены графики переходных процессов для коорди-
218
наты x2 (t ) и ее оценки xˆ2 (t ) .
Рис.1.120
На рис. 1.121 и рис. 1.22 представлены процессы для приведенных возмущений w1 (t ) , w2 (t ) и их оценки wˆ1 (t ) , wˆ 2 (t ) соответственно.
Рис.1.121
Рис. 1.122
Полученные оценки wˆ1 (t ) , wˆ 2 (t ) можно использовать в законе управления
для подавления внешних возмущений w1 (t ) , w2 (t ) .
Вопросы для самопроверки
1. Что понимается под условием управляемости системы?
2. Что понимается под условием наблюдаемости системы?
3. Для какой цели используется НУ?
219
4. В каком случае НУ играет роль корректирующего устройства?
5. Каким образом можно обеспечить компенсацию неизвестного внешнего воздействия?
6. В чем недостаток систем с НУ?
7. Что понимается под грубым законом управления установившегося движения?
8. Каким способом можно построить модель внешних воздействий?