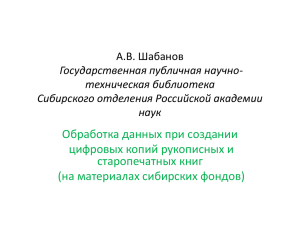
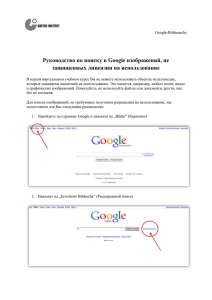
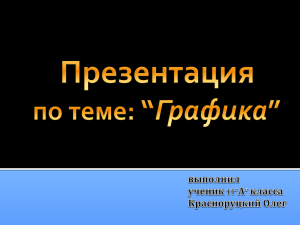
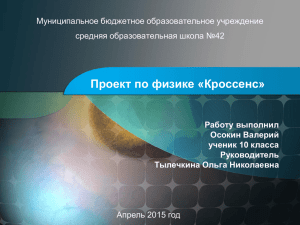
Пусть элементы изображения p, q и z имеют координаты (x, y), (s, t) и (v, w) соответственно. Функция D называется функцией расстояния или метрикой, если: а) D(p, q) ≥ 0, причем D(p, q) = 0 тогда и только тогда, когда p = q, б) D(p, q) = D(q, p), в) D(p, z) ≤ D(p, q) + D(q, z). Евклидово расстояние (метрика L2) между элементами p и q определяется следующим образом: De ( p, q) [( x s ) 2 ( y t ) 2 ] 0, 5 Расстояние D4 (метрика L1) между элементами p и q определяется следующим образом: D4(p,q) = |x−s|+|y−t| В этом случае пиксели, находящиеся на расстоянии D4, меньшем или равном r, от заданной точки (x, y), образуют повернутый на 45° квадрат с центром в этой точке. Пиксели с расстоянием D4 ≤ 2 от центральной точки образуют следующие замкнутые линии равных расстояний: Пиксели с расстоянием D4 = 1 являются четверкой соседей для элемента (x, y) Метрика L∞ Расстояние D8 (метрика L∞) между элементами p и q определяется следующим образом: D8(p,q) = max(|x – s|, |y – t|) В этом случае пиксели, находящиеся на расстоянии D8, меньшем или равном r, от заданной точки (x, y), образуют квадрат с центром в этой точке. Например, пиксели с расстоянием D8 ≤ 2 от центральной точки образуют следующие замкнутые линии равных расстояний: Пиксели с расстоянием D8 = 1 являются восьмеркой соседей для элемента (x, y) Поэлементные и матричные операции Два изображения размерами 2x2 Поэлементные операции, выполняются попиксельно над соответствующими элементами изображений. Поэлементное произведение этих двух изображений вычисляется так: Матричное произведение Арифметические операции над изображениями являются поэлементными операциями. Они применяются к паре соответствующих пикселей двух изображений. Эти операции применяются к соответственным парам элементов изображений f и g для x = 0, 1, 2,..., M – 1 и y = 0, 1, 2,..., N – 1, где, M и N — число строк и столбцов изображений соответственно. Ясно, что s, d, p и v тоже являются изображениями с размерами MxN. Заметим, что в определенной таким образом арифметике участвуют изображения одинаковых размеров Процессы пространственной обработки описываются уравнением g(x, y)=T[f(x, y)], где f(x, y) — входное изображение, g(x, y) — обработанное изображение (отклик), а T — оператор над f, определенный в некоторой окрестности точки (x, y). Оператор T может быть применим к одному изображению или же к набору изображений. функция преобразования яркости (или функцией отображения), имеет вид s = T(r) где r и s - переменные, обозначающие соответственно значения яркостей изображений f и g в каждой точке (x, y). Функция повышения контраста. Пороговая функция. Представление 8-битового изображения в виде набора битовых плоскостей Гистограммой с уровнями яркости в диапазоне [0, L – 1] называется дискретная функция h(rk) = nk, где rk есть k-й уровень яркости, а nk — число пикселей на изображении, имеющих яркость rk. - Нормировка гистограммы Нормировка гистограммы осуществляется путем деления каждого из ее значений на общее число пикселей в изображении, обозначаемое произведением MN. Значения нормированной гистограммы будут p(rk) = nk/MN для k = 0, 1, …, L – 1. p(rk) есть оценка вероятности появления пикселя со значением яркости rk. Сумма всех значений нормированной гистограммы равна единице. Гистограммы являются основой для многочисленных методов пространственной обработки. Видоизменение гистограммы (гистограммная обработка) может быть использовано для улучшения изображений. Содержащаяся в гистограмме информация весьма полезна в других задачах, таких как сжатие и сегментация изображений. Гистограммы достаточно просты как для программного вычисления, так и для аппаратной реализации, что делает их удобным инструментом для обработки изображений в реальном времени. Преобразование (отображение) вида ( L 1) k s k T (rk ) ( L 1) p r (r j ) nj MN j 0 j 0 где MN есть общее число пикселей на изображении, nk — число точек яркости rk, а L — максимально допустимое число уровней яркости на изображении (т. е. 256 для 8-битового изображения), называется эквализацией или линеаризацией гистограммы. Суть ее заключается в растягивании гистограммы, делая ее более равномерной. k выборочное среднее выборочная дисперсия 1 m N M 1 N 1 f ( x, y) x0 y 0 1 MN 2 M 1 N 1 [ f ( x, y) m] 2 x0 y 0 для x = 0, 1, 2, …, M – 1 и y = 0, 1, 2, …, N – 1 L1 m ri p(ri ) i 0 L1 (ri m) 2 p(ri ) 2 i 0 Фильтр состоит из окрестности и заданной операции, которая выполняется над пикселями изображения, попадающими в окрестность. Изображение Маска a b g ( x, y ) w( s, t ) f ( x s, y t ) x a y b g(x,y) = w(-1,-1) f(x-1, y-1)+ w(-1,0) f(x-1,y) + …+ w(0,0) f(x,y) + … + w(1,0) f(x+1,y) + w(1,1) f(x+1,y+1) В каждой точке (x, y) изображения отклик g(x, y) задается суммой произведений коэффициентов фильтра на соответствующие значения пикселей в области, покрытой маской фильтра: f(x,y) 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 1 2 3 4 5 6 7 8 9 w(x,y) 0 0 0 0 0 0 0 0 0 0 a b g ( x, y ) w( s, t ) f ( x s, y t ) x a y b полный результат начало 1 4 7 0 0 0 0 0 0 2 5 8 0 0 0 0 0 0 3 6 9 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 9 6 3 0 0 0 0 0 0 8 5 2 0 0 0 0 0 0 7 4 1 0 0 0 обрезанный 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 9 6 3 0 0 8 5 2 0 0 7 4 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 096 0 0 0 0 0 0 0 0 085 0 0 0 0 0 0 0 0 7 0 0 4 0 3 0 0 0 0 0 0 2 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 000 0 0 0 0 1 0 0 0 000 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 9 8 7 6 5 4 2 2 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 4 7 0 0 0 0 0 0 2 5 8 0 0 0 0 0 0 3 6 9 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 4 7 0 0 2 5 8 0 0 3 6 9 0 0 0 0 0 0 Линейные сглаживающие фильтры однородный усредняющий фильтр взвешенное среднее Общая формула фильтрации изображения размерами MxN фильтром взвешенного среднего по окрестности mxn (m и n — нечетные) задается выражением a g ( x, y ) b w(s, t ) f ( x s, y t ) s a t b a b w(s, t ) s a t b Результаты сглаживания усредняющим фильтром с квадратной маской размерами m = 3, 5, 9, 15 и 35 Важным применением пространственного сглаживания является расфокусировка изображения, позволяющая создать грубый образ объектов, которые могут представлять интерес. При этом яркость мелких объектов смешивается с фоном, в то время как большие объекты остаются в виде пятен и могут быть легко обнаружены. Изображение размерами 528x485 пикселей, полученное космическим телескопом «Хаббл». Изображение, обработанное сглаживающей маской размерами 15x15 элементов. Результат применения порогового обнаружения к изображению. Медианный фильтр заменяет значение пикселя на значение медианы распределения яркостей всех пикселей в окрестности (включая и исходный). Медианные фильтры весьма популярны потому, что для определенных типов случайных шумов они демонстрируют отличные возможности подавления шума при значительно меньшем эффекте расфокусировки, чем у линейных сглаживающих фильтров с аналогичными размерами. В частности, медианные фильтры эффективны при фильтрации импульсных шумов, иногда называемых шумами «соль и перец», которые выглядят как наложение на изображение случайных черных и белых точек. 1. Рентгеновский снимок монтажной платы, искаженный импульсным шумом. 2. Подавление шума усредняющим фильтром по окрестности 3x3. 3. Подавление шума медианным фильтром по окрестности 3x3. Фильтры повышения резкости основаны на первой и второй производных. Производные дискретной функции определяются в терминах разностей. Первая производная должна быть: (1) равной нулю на областях с постоянным уровнем яркости; (2) ненулевой в начале и в конце ступеньки или склона яркости; (3) ненулевой на склонах яркости. f f ( x 1) f ( x) x Вторая производная должна быть: (1) равной нулю на плоских участках; (2) ненулевой в начале и в конце ступеньки или склона яркости; (3) равной нулю на склонах постоянной крутизны. 2 f g ( x, y ) 2 f ( x 1) f ( x 1) 2 f ( x) x В случае функции двух переменных f(x, y) определяется как 2 f 2 f 2 f 2 2 x y Для частной второй производной по x 2 f f ( x 1) f ( x 1) 2 f ( x) x 2 Для частной второй производной по y 2 f f ( y 1) f ( y 1) 2 f ( y) 2 y Дискретная формулировка двумерного лапласиана двух переменных 2 f ( x, y ) f ( x 1) f ( x 1) 2 f ( x) f ( y 1) f ( y 1) 2 f ( y ) Маски фильтра, используемая для реализации уравнения 2 f ( x, y ) f ( x 1) f ( x 1) 2 f ( x) f ( y 1) f ( y 1) 2 f ( y ) Повышение резкости изображения с помощью лапласиана 1. Нерезкое изображение Северного полюса Луны 2. Изображение с повышенной резкостью при использовании маски 1 3. Изображение с повышенной резкостью при использовании маски 2 Процедура, для повышения резкости изображений. Заключается в вычитании из изображения его нерезкой (сглаженной) копии. Эта процедура, называемая нерезким маскированием, состоит из следующих шагов. 1. Создание нерезкого изображения. 2. Вычитание нерезкого изображения из исходного изображения (результирующая разность называется маска). 3. Прибавление маски с заданным весом к исходному изображению. g(x,y) = f(x,y) + kgmask(x,y), k (k ≥ 0)весовой коэффициент. При k = 1 мы получаем нерезкое маскирование, как определено выше. При k > 1 процесс называется фильтрацией с подъемом высоких частот. Выбор k < 1 снижает вклад нерезкой маски.