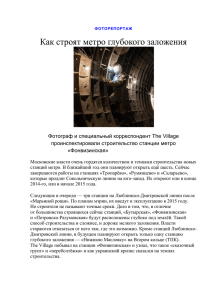
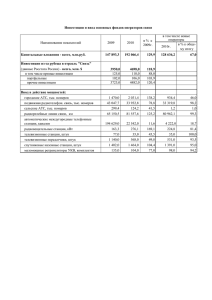
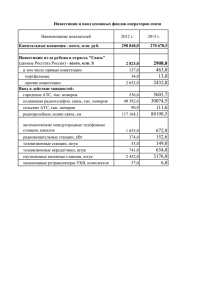
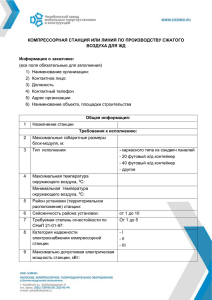
Вступление В этой главе излагаются основные принципы радиосвязи, применимые к навигационному оборудованию, а также практические знания о том, как использовать эти системы в полете по приборам. Эта информация обеспечивает основу для всех процедур по приборам, включая стандартные процедуры вылета по приборам (SIDS), процедуры вылета (DPS), схемы удержания и подходы, поскольку каждый из этих маневров состоит в основном из точного полета по приборам ориентации и точного отслеживания с использованием навигационных систем. Основные принципы радиосвязи Радиоволна - это электромагнитная (ЭМ) волна с частотными характеристиками, которые делают ее полезной. Волна будет проходить большие расстояния в космосе (в атмосфере или за ее пределами), не теряя слишком большой силы. Антенна используется для преобразования электрического тока в радиоволну, чтобы он мог перемещаться в пространстве к приемной антенне, которая преобразует его обратно в электрический ток для использования приемником. Как Распространяются Радиоволны Вся материя обладает различной степенью проводимости или сопротивления радиоволнам. Сама Земля действует как величайший резистор для радиоволн. Излучаемая энергия, проходящая вблизи земли, вызывает напряжение в земле, которое вычитает энергию из волны, уменьшая силу волны по мере увеличения расстояния от антенны. Деревья, здания и залежи полезных ископаемых в разной степени влияют на прочность. Излучаемая энергия в верхних слоях атмосферы также подвергается воздействию, поскольку энергия излучения поглощается молекулами воздуха, воды, и пыль. Характеристики распространения радиоволн варьируются в зависимости от частоты сигнала и конструкции, использования и ограничений оборудования. Наземная волна Наземная волна распространяется по поверхности Земли. Вы можете лучше всего представить себе путь наземной волны в туннеле или переулке, ограниченном поверхностью Земли и ионосферой, которая удерживает наземную волну от выхода в космос. Как правило, чем ниже частота, тем дальше будет распространяться сигнал. Наземные волны можно использовать в навигационных целях, потому что они надежно и предсказуемо движутся по одному и тому же маршруту изо дня в день и не подвержены влиянию слишком большого количества внешних факторов. Диапазон частот наземных волн, как правило, составляет от самые низкие частоты в радиочастотном диапазоне (возможно, такие же низкие, как 100 Гц) примерно до 1000 кГц (1 МГц). Хотя на частотах выше этого, до 30 МГц, присутствует составляющая наземной волны, наземная волна на этих более высоких частотах теряет силу на очень коротких расстояниях. Небесная волна Небесная волна на частотах от 1 до 30 МГц хороша для больших расстояний, потому что эти частоты преломляются или “изгибаются” ионосферой, в результате чего сигнал отправляется обратно на Землю с высоты неба и принимается на больших расстояниях. [Рисунок 7-1] Используемые высокочастотными (ВЧ) радиостанциями в самолетах, сообщения могут передаваться через океаны, используя мощность всего от 50 до 100 Вт. Частоты, которые создают небесную волну, не используются для навигации, поскольку путь передачи сигнала от передатчика к приемнику сильно варьируется. Волна – это “отскочил” от ионосферы, которая постоянно меняется из-за различного количества солнечного излучения, достигающего его (ночные/дневные и сезонные колебания, активность солнечных пятен и т.д.). Поэтому небесная волна ненадежна для навигационных целей. Для целей авиационной связи небесная волна (HF) надежен примерно на 8090 процентов. КВ постепенно заменяется более надежной спутниковой связью. Рисунок 7-1. Распространение наземных, космических и небесных волн. Космическая волна Когда они способны проходить через ионосферу, радиоволны 15 МГц и выше (вплоть до многих ГГц) считаются космическими волнами. Большинство навигационных систем работают с сигналами, распространяющимися в виде космических волн. Частоты выше 100 МГц почти не имеют компонентов наземных или небесных волн. Это космические волны, но (за исключением глобальной системы позиционирования (GPS)) навигационный сигнал используется до того, как он достигнет ионосферы, поэтому влияние ионосферы, которое может вызвать некоторые ошибки распространения, минимально. Ошибки GPS, вызванные прохождением через ионосферу, являются значительными и корректируются системой GPS-приемника. Космические волны имеют еще одну характеристику, вызывающую озабоченность пользователей. Космические волны отражаются от твердых объектов и могут быть заблокированы, если объект находится между передатчиком и приемником. Ошибка местоположения и местности, а также ошибка модуляции винта / ротора в системах с очень высоким всенаправленным диапазоном (VOR) вызваны этим отскоком. Искажение курса системы посадки по приборам (ILS) также является результатом этого явления, что привело к необходимости установления критических зон ILS. Как правило, космические волны являются “прямой видимостью”, но волны более низких частот будут несколько “изгибаться” за горизонт. Сигнал VOR на частоте от 108 до 118 МГц является более низкой частотой, чем у оборудования для измерения расстояния (DME) на частоте от 962 до 1213 МГц. Поэтому, когда воздушное судно летит “за горизонт” станции VOR/DME, DME, как правило, первыми прекращают функционировать. Помехи при приеме радиоволн Статические помехи искажают радиоволну и мешают нормальному приему сигналов связи и навигации. Низкочастотное бортовое оборудование, такое как автоматический пеленгатор (ADF) и LORAN, особенно подвержено статическим помехам. Использование очень высоких частот (УКВ) и сверхвысоких частот (УВЧ) позволяет избежать многих эффектов шума разряда. Статический шум, слышимый на навигационных или коммуникационных радиочастотах, может быть предупреждением о помехах дисплеям навигационных приборов. Некоторые из проблемы, вызванные статикой осадков (P-статикой), заключаются в следующем: Полная потеря УКВ-связи. Ошибочные показания магнитного компаса. Самолет, летящий с одним низко расположенным крылом при использовании автопилота. Пронзительный визг на аудио. Звук моторной лодки на аудио. Потеря всей авионики. Неработающая навигационная система очень низкой частоты (VLF) Неустойчивые показания приборов. Слабые передачи и плохой прием радиосигналов. Огонь Святого Эльма. Традиционные Навигационные Системы Ненаправленный радиомаяк (NDB) Ненаправленный радиомаяк (NDB) - это наземный радиопередатчик, который передает радиосигнал во всех направлениях. ADF, при использовании с NDB, определяет пеленг от самолета до передающей станции. Индикатор может быть установлен в отдельном приборе на панели самолета. [Рисунок 72] Стрелка ADF указывает на наземную станцию NDB для определения относительного пеленга (RB) на передающую станцию. Это количество измеренных градусов по часовой стрелке между курсом самолета и направлением, с которого берется пеленг. Магнитный курс самолета (MH) – это направление, в котором самолет нарисован относительно магнитного севера. Магнитный пеленг (MB) – это направление на радиопередающую станцию или от нее, измеренное относительно магнитного севера. Рисунок 7-2. Прибор и приемник индикатора ADF. Компоненты NDB Наземное оборудование, NDB, передает в диапазоне частот от 190 до 535 кГц. Большинство ADFS также настраивают частоты полосы AM-вещания выше полосы NDB (от 550 до 1650 кГц). Однако эти частоты не одобрены для навигации, поскольку станции не идентифицируют себя непрерывно, и они гораздо более восприимчивы к распространению небесных волн, особенно от заката до рассвета. Станции NDB способны передавать голосовую информацию и часто используются для передачи автоматизированной системы наблюдения за погодой (AWOS). Воздушное судно должно находиться в зоне действия НБР. Покрытие зависит от мощности передающей станции. Прежде чем полагаться на показания ADF, определите станцию, прослушав идентификатор азбуки Морзе. Станции NDB обычно состоят из двух букв или буквенно-цифровой комбинации. Компоненты ADF Бортовое оборудование включает в себя две антенны, приемник и индикаторный прибор. Антенна “sense” (ненаправленная) принимает сигналы почти с одинаковой эффективностью со всех направлений. “Петлевая” антенна лучше принимает сигналы с двух направлений (двунаправленных). Когда входы контурной и чувствительной антенны обрабатываются совместно в радиоприемнике ADF, результатом является возможность хорошо принимать радиосигнал во всех направлениях, кроме одного, тем самым устраняя всю неоднозначность направления. Индикаторный прибор может быть одного из четырех видов: фиксированная карта ADF, поворотный компас-карта ADF или радиомагнитный индикатор (RMI) с одной или двумя иглами. Фиксированная карта ADF (также известный как индикатор относительного пеленга (RBI)) всегда указывает на ноль в верхней части прибора, а стрелка указывает RB на станцию. На рисунке 7-3 показан RB, равный 135°; если MH равен 045°, MB до станции составляет 180°. (MH + RB = МБ до станции.) Рисунок 7-3. Относительный пеленг (RB) на индикаторе с фиксированной картой. Обратите внимание, что на карте всегда указано 360°, или север. В этом случае относительный пеленг на станцию составляет 135° вправо. Если бы самолет находился на магнитном курсе 360°, то магнитный пеленг (MB) также будет 135°. ADF с подвижной картой позволяет пилоту поворачивать текущий курс самолета к верхней части прибора так, чтобы головка стрелки указывала MB на станцию, а хвост указывал MB от станции. На рисунке 7-4 показан курс 045°, МБ до станции 180° и МБ от станции 360°. Рисунок 7-4. Относительный пеленг (RB) на индикаторе подвижной карты. Если поместить магнитный курс самолета (MH) 045° под верхним индексом, относительный пеленг (RB) 135° вправо также будет магнитным пеленгом (без условий ветра), который приведет вас к передающей станции. RMI отличается от ADF с подвижной картой тем, что он автоматически поворачивает карту азимута (дистанционно управляемую гирокомпасом) для отображения курса самолета. RMI имеет две стрелки, которые могут использоваться для отображения навигационной информации либо с ADF, либо с приемника VOR. Когда игла приводится в движение ADF, головка иглы указывает МБ НА станцию, настроенную на приемнике ADF. Хвост иглы - это подшипник ОТ станции. Когда игла RMI приводится в действие приемником VOR, игла указывает, где воздушное судно находится радиально относительно Станция ВОР. Стрелка указывает на азимут станции, как указано на карте азимута. Хвост иглы указывает на радиус VOR, на котором в данный момент находится или пересекает воздушное судно. На рисунке 7-5 показан курс 005°, МБ до станции составляет 005°, а МБ от станции составляет 185°. Рисунок 7-5. Радиомагнитный индикатор (RMI). Поскольку магнитный курс самолета автоматически изменяется, относительный пеленг (RB), в данном случае 095°, будет указывать магнитный пеленг (095°) к станции (без ветровых условий) и магнитному курсу, который приведет вас туда. Функция ADF ADF можно использовать для определения вашего местоположения, отслеживания входящих и исходящих сообщений и перехвата пеленга. Эти процедуры используются для выполнения схем удержания и подходов к неточным приборам. Ориентация Стрелка ADF указывает на станцию, независимо от курса или положения самолета. Таким образом, обозначенный RB представляет собой угловое соотношение между курсом воздушного судна и станцией, измеренное по часовой стрелке от носа воздушного судна. Подумайте о показаниях носа / хвоста и левой / правой стрелки, визуализируя циферблат ADF с точки зрения продольной оси самолета. Когда стрелка указывает на 0°, нос самолета указывает непосредственно на станцию; при указателе на 210° станция находится на 30° слева от хвоста; при указателе на 090°, станция находится на правом конце крыла. Только RB не указывает местоположение воздушного судна. RB должен быть связан с курсом воздушного судна, чтобы определить направление на станцию или от нее. Станционный проезд Когда вы находитесь рядом со станцией, небольшие отклонения от желаемой дорожки приводят к большим отклонениям стрелки. Поэтому важно как можно скорее установить правильный угол коррекции дрейфа. Внесите небольшие поправки в курс (не более 5 °), как только стрелка покажет отклонение от курса, до тех пор, пока она не начнет устойчиво вращаться в направлении положения кончика крыла или не покажет неустойчивые колебания влево / вправо. Вы находитесь на траверзе станции, когда стрелка указывает на 90 ° от вашего пути. Удерживайте свой последний скорректированный постоянный курс и время прохождения станции, когда стрелка покажет положение кончика крыла или установится в положении 180° или около него. Временной интервал от первых признаков близости станции до положительного прохождения станции меняется в зависимости от высоты — от нескольких секунд на низких уровнях до 3 минут на большой высоте. Самонаведение ADF может использоваться для “дома” на станции. Самонаведение - это полет самолета по любому курсу, необходимому для того, чтобы стрелка указывала прямо в положение 0° RB. Чтобы подключиться к станции, настройте станцию, определите сигнал азбуки Морзе, а затем поверните самолет, чтобы перевести стрелку азимута ADF в положение 0° RB. Повороты следует выполнять с помощью указателя курса. Когда поворот будет завершен, проверьте стрелку ADF и при необходимости внесите небольшие исправления. На рисунке 7-6 показано наведение, начиная с начального MH 050° и RB 310°, что указывает на необходимость поворота налево на 50° для получения нулевого значения RB. Поверните налево, разворачиваясь на 50° минус 50° равно 360°. Затем вносятся небольшие поправки в заголовок, чтобы обнулить стрелку ADF. Рисунок 7-6. Самонаведение ADF с Боковым ветром Если ветра не будет, самолет вернется на станцию по прямой трассе над землей. При боковом ветре самолет будет следовать окольным путем к станции с подветренной стороны от прямого пути к станции. Отслеживание Для отслеживания используется заголовок, который будет поддерживать желаемый путь к станции или от нее независимо от условий бокового ветра. Интерпретация указателя курса и стрелки выполняется для поддержания постоянного расстояния до станции или от нее. Чтобы отследить входящий, поверните к курсу, который приведет к нулевому RB. Сохраняйте этот курс до тех пор, пока отклонение от курса не будет обозначено смещением стрелки, которое произойдет при наличии бокового ветра (стрелка движется влево = ветер слева; стрелка движется вправо = ветер справа). Быстрая скорость пеленга изменение с постоянным курсом указывает либо на сильный боковой ветер, либо на близость к станции, либо на то и другое. При определенном (от 2° до 5°) изменении показаний стрелки поверните в направлении отклонения стрелки, чтобы перехватить начальный MB. Угол перехвата должен быть больше, чем количество градусов дрейфа, в противном случае воздушное судно будет медленно дрейфовать из-за ветра, толкающего воздушное судно. Если повторять достаточно часто, путь до станции будет казаться круговым, а расстояние значительно увеличится по сравнению с прямым путем. Угол перехвата зависит от скорости дрейфа, скорости самолета и близости станции. Поначалу стандартно удваивать RB при повороте на ваш курс. Например, если ваш курс совпадает с вашим курсом, а стрелка указывает на 10° влево, поверните на 20° влево, вдвое больше начального RB. [Рисунок 7-7] Это будет ваш угол перехвата для захвата RB. Удерживайте этот курс, пока стрелка не отклонится на 20 ° в противоположном направлении. То есть отклонение иглы равно углу перехвата (в данном случае 20°). Трасса была перехвачена, и самолет будет оставаться на трассе до тех пор, пока RB остается на том же количестве градусов, что и угол коррекции ветра (WCA), угол между требуемой трассой и курс воздушного судна, необходимый для отслеживания воздушного судна по нужному маршруту. Возглавьте перехват, чтобы избежать промаха по трассе. Поверните на 10° по направлению к входящему курсу. Теперь вы входите с углом коррекции 10° влево. ПРИМЕЧАНИЕ: На рисунке 7-7 для самолета, ближайшего к станции, WCA составляет 10° влево, а RB - 10° вправо. Если эти значения не изменятся, воздушное судно будет следовать непосредственно к станции. Если вы заметили отклонение от курса в исходном направлении, снова поверните к исходному курсу перехвата. Когда желаемый курс будет перехвачен повторно, поверните на 5° в сторону входящего курса, продолжая вход с коррекцией дрейфа на 15°. Если начальная коррекция дрейфа на 10° является чрезмерной, как показано отклонением иглы от ветра, поверните параллельно требуемому курс и позвольте ветру вернуть вас на прежний курс. Когда стрелка снова обнулится, поверните против ветра с уменьшенным углом коррекции дрейфа. Рисунок 7-7. ADF Отслеживает Входящие сообщения.