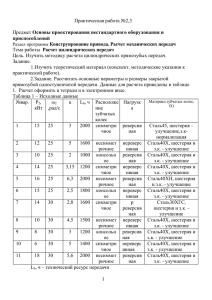
Расчет механических передач приводов нефтегазового оборудования
advertisement

Министерство образования и науки Российской Федерации федеральное государственное бюджетное образование учреждение высшего профессионального образования «Российский государственный университет нефти и газа (НИУ) имени И.М. Губкина» Кафедра технической механики С.А. Макушкин, В.Г.Певнев РАСЧЕТ МЕХАНИЧЕСКИХ ПЕРЕДАЧ ПРИВОДОВ НЕФТЕГАЗОВОГО ОБОРУДОВАНИЯ ЧАСТЬ I. МЕТОДИКИ РАСЧЕТА Москва 2017 УДК 621.81 Рецензент: д.т.н., профессор А.П.Евдокимов С.А. Макушкин, В.Г.Певнев. Расчет механических передач приводов нефтегазового оборудования. Часть I. Методики расчета. Учебно-методическое пособие по курсу «Детали машин и основы конструирования». -М.: РГУ нефти и газа им И.М. Губкина, 2017.- 106 с. Для использования в учебной практике предложено проектирование механических приводов оборудования рассматривать с позиции их модификации. Это позволяет путем сравнительного анализа альтернативных вариантов принимать оптимальные технические решения. Пособие содержит учебно-методические и справочные данные, необходимые для выбора, расчета и конструирования механических передач проектируемых приводов с деталями и узлами машин общетехнического назначения, которые широко распространены в нефтегазовом оборудовании. Учебно-методическое пособие предназначено для подготовки бакалавров, обучающихся по направлениям 21.03.01 «Нефтегазовое дело», 15.03.01 «Машиностроение», 15.03.02 «Технологические машины и оборудование», 20.03.01 «Техносферная безопасность», 27.03.01 «Стандартизация и метрология» ,. при выполнении ими курсовых проектов и работ, а также домашних заданий в ходе изучения курсов «Детали машин и основы конструирования» и «Прикладная механика». Работа может быть полезна магистрантам и аспирантам, а также использована в работе СКБ и УиНЦ им И.М. Губкина. Данное издание является собственностью РГУ нефти и газа имени И.М. Губкина и его репродуцирование (воспроизведение) любыми способами без согласия университета запрещается © РГУ нефти и газа имени И.М. Губкина, 2017 © С.А. Макушкин , В.Г.Певнев 2017 2 ВВЕДЕНИЕ Принцип модификации конструкций широко используется при проектировании машин, приборов, агрегатов и их механизмов, в том числе передаточных, которые могут состоять, в свою очередь, из одной или нескольких механических передач. Модификация позволяет добиваться одних и тех же или близких результатов по техническим характеристикам (параметрам) объектов проектирования различными конструктивными средствами. К основным характеристикам, которые необходимо обеспечить в результате расчета и конструирования механических передач при проектировании модификаций приводов оборудования, относятся выходные параметры на рабочем органе машинного агрегата: силовые ( Ft , Н или Т , Н м ), кинематические ( U 1 / n , V , м / с или , рад / с ) и геометрические, например D, мм - диаметр рабочего n органа (ведущего барабана или ведущей звездочки конвейера и т.п.). В техническом задании (ТЗ) на проектирование они заранее достигаются тремя конструктивными вариантами (модификациями) механическим приводов, которые включают в себя унифицированные электродвигатели серии 4А, компенсирующие муфты, а также: двухступенчатый коническо-цилиндрический редуктор и открытую цепную передачу – в приводе первой модификации (М1), открытую ременную передачу и одноступенчатый редуктор – в приводе второй модификации (М2), двухступенчатый планетарный редуктор – в приводе третьей модификации (М3). Практически существует гораздо больше модификаций механических приводов различной степени сложности. Часть из них отражена в типовых заданиях на курсовые проекты и курсовые и домашние работы при изучении студентами курсов «Детали машин и основы конструирования» и «Прикладная механика». Основными входными параметрами привода, получаемыми в результате расчетов, являются: мощность на входном (ведущем) валу передаточного механизма P P , Вт , или непосредственно мощность электродвигателя; 1 эд частота вращения ведущего вала n n 1 3 эд , об / мин . Остальные энергетические, кинематические и силовые параметры (,U , ni ,i ,Ti ) являются вспомогательными, промежуточными и определяются по соответствующим аналитическим зависимостям. При выполнении проектных (проектировочных) и проверочных (уточненных) расчетов могут использоваться также эмпирические зависимости. Исходя из принципа равнопрочности деталей машин, все элементы модифицированных приводов должны обеспечить требуемый срок службы t ( Lh ) при заданном типовом режиме нагружения или эквивалентного ему ступенчатом графике нагрузки. Пособие содержит справочные и методические материалы, необходимые для выбора , расчета распространенных механических передач и других частей приводов оборудования. В определенной мере в пособии адаптированы принципы и методы проектирования деталей и узлов машин, распространенных в нефтегазовом оборудовании, и приведены соответствующие сведения из учебной, справочной и методической литературы [1…17]. Пособие включает в себя методики (Часть I) и примеры (Часть II) расчета закрытых зубчатых (цилиндрических , конических, планетарных) и червячных передач, а также открытых (цепных и ременных) передач. При необходимости расчета закрытых конических передач с непрямыми зубьями, а также открытых цилиндрических и конических зубчатых передач читатели могут обратиться к литературе [1- 6]. Сведения о расчете цилиндрических передач одноступенчатых редукторов при постоянной нагрузке приведены в [11,12], тяжелонагруженных цепных передач бурового оборудования в [13], закрытых фрикционных и специальных плоско-, клино- и зубчатоременных, а также поликлиновых передач в [14]. 4 РАЗДЕЛ I РАСЧЕТ ЗУБЧАТЫХ ПЕРЕДАЧ РЕДУКТОРА ПРИВОДА ПЕРВОЙ МОДИФИКАЦИИ (М1) Условия задачи Рассчитать зубчатые передачи коническо-цилиндрического редуктора, входящего в привод к ленточному или цепному транспортеру. Исходные данные для расчета Кинематическая схема привода М1 приведена на рисунке 1. Привод первой модификации состоит из электродвигателя 1, компенсирующей муфты 2, двухступенчатого зубчатого редуктора 3 и открытой цепной передачи 4, соединяющей выходной вал редуктора 3 с приводным валом конвейера или транспортера 5. Принятые на схеме нагрузочные и кинематические обозначения: Pэ PI , PII , PIII , PIV — мощность на валах привода, кВт; n nI , n II , nIII , nIV — частота вращения валов, об/мин; э T TI , TII , TIII , TIV — крутящий момент на валах, Нм; э N I , N II , N III , N IV — число циклов нагружения валов. 1) Усилие на ленте Fл или на цепи Fц транспортера, Н. 2) Линейная скорость ленты V л или цепи Vц , м/сек. 3) Диаметр барабана ленточного транспортера Dб , мм или шаг цепи tц , мм и число зубьев звездочки Z зв транспортера. 4) Длина барабана Lб ,мм L или расстояние между звездочками зв ,мм. 5) Наклон зубьев: для цилиндрической передачи — косые зубья, для конической передачи — прямые зубья. Примечание - Для конической передачи можно использовать также круговые и косые (тангенциальные) зубья. 6) Режим нагружения суммарный срок службы привода t указывается в задании на проектирование. Типовые режимы нагружения указаны на рисунке 2. Режим нагружения может быть задан типовым или по графику нагрузки (рисунок 3). 5 IV Dзв=tц×Zзв Dзв Fц Vзв(tц,Zзв) 5 1 — электродвигатель, 2 — муфта, 3 — редуктор, 4 — цепная передача, 5 — ленточный или цепной транспортер Рисунок 1 - Кинематическая схема привода первой модификации 6 0 — постоянный, I — тяжелый, II — средний равновероятный, III — средний нормальный, IV — легкий, V — особо легкий Рисунок 2 - Типовые режимы нагружения а) б) Tn Tn T=const α1=1 T1 tn tΣ tn t1=k1tΣ T2=α2T1 T3=α3T2 T2 T3 t2=k2tΣ t3=k3tΣ tΣ а) при постоянных нагрузках, б) при переменных нагрузках T — момент, соответствующий пиковым нагрузкам, п t — суммарное время действия этих нагрузок, п T T 1 ном — номинальный крутящий момент электродви- гателя. Рисунок 3 - Графики нагрузок 7) На графике нагрузки пусковой крутящий момент T Т п Т ном макс , Tном где Tмакс Tном — берется из каталога выбранного электродвигателя. 7 Суммарное время работы передачи может быть задано заранее или определено по формуле t t год 365K год 24Kсут, K год , K сут — коэффициенты использования передачи в течение го- да и суток — указаны в задании; t год — общий срок службы передачи в годах. На рисунке 3 i Ti t , ki i T1 t , i = 1, 2 ,3…— число ступеней графика нагрузки. Здесь T1 — наибольший из длительно действующих крутящих моментов на графике нагрузки. Требования к оформлению работы Работа выполняется на сброшюрованных листах писчей бумаги формата А4 с обложкой, на лицевой стороне которой указывается: кафедра технической механики, домашняя работа «Расчет зубчатых передач», номер задания, номер группы, фамилия и инициалы студента и преподавателя, дата выполнения работы. Текст печатается на одной стороне листа, имеющего слева поле для подшивки листов (25 ÷ 30 мм), а также поля сверху и снизу 25 ÷ 30 мм), справа (15 ÷ 20 мм). Оформление работы следует выполнять в соответствии с ГОСТ 2.105-95 « Общие требования к текстовым документам». Схемы, рисунки и компоновку привода можно выполнять на миллиметровой бумаге или на отдельных страницах. 1 РАСЧЕТ ОБЩИХ ПАРАМЕТРОВ ПРИВОДА М1 1.1 Требуемая мощность на валу исполнительной машины (транспортера или другой машины) Для ленточного транспортера для цепного транспортера F V F V ц ц P , кВт P л л , кВт ц 1000 б 1000 где – FЛ (FЦ ), VЛ (VЦ ) - усилие и скорость ленты (цепи). Примечание - В ряде заданий требуемая мощность указана в данных для расчета. 8 1.2 Выбор значений коэффициента полезного действия (КПД) передачи и определение мощности электродвигателя 1.2.1 КПД передач (при последовательном направлении силового потока) Общий КПД об м ред отк КПД редуктора: для коническо-цилиндрического редуктора m , ред кон цил пк для редуктора с цилиндрическими зубчатыми колесами s m , ред цил пк s — число ступеней редуктора, т — число пар подшипников качения. Структура формул общего КПД должна соответствовать КПД отдельных элементов заданной схемы редуктора и открытых передач привода от двигателя к исполнительной машине. Открытые передачи могут располагаться между электродвигателем и редуктором или редуктором и узлом исполнительной машины. В первом случае применяют ременную передачу, во втором — цепную. для муфты м 0,99 В нашем примере: (табл. 1.1), для цепной передачи отк цеп 0,915 , при зацеплении конических колес кон 0,96 , для подшипников качения пк 0,99 , при зацеплении цилиндрических колес цил 0,97 . ред об кон 3 , цил пк м ред цеп 9 Т а б л и ц а 1.1 - Значения КПД механических передач (без учета трения в подшипниках) Значения КПД передачи Тип передачи закрытой открытой Зубчатые передачи: с цилиндрическими колесами 0,96...0,98 0,93...0,95 с коническими колесами 0,95...0,97 0,92...0,94 простая планетарная передача 0,95...0,97 — Цепная передача 0,93...0,95 0,90...0,93 Муфта компенсирующая 0,99...0,995 0,98...0,99 Ременная передача — 0,95..0,98 Примечания 1 КПД подшипников качения — 0,990...0,995, КПД подшипников скольжения — 0,980...0,990 на обе опоры каждого вала. 2 Приняв меньшие значения КПД, можно КПД подшипников и муфты не учитывать. . 1.2.2. Требуемая мощность на валу электродвигателя В нашем примере P P* , кВт , э об P P или P . б ц где Примечание - Здесь и далее индекс* у параметра означает предварительно выбранное его значение с последующим уточнением. Мощность электродвигателя РЭ принимается по параметрическому ряду (таблица 1.2) с учетом допускаемой 5% перегрузки по усло- 0,95P* . э э вию P 10 1.3 Предварительный кинематический расчет и выбор электродвигателя по каталогу 1.3.1 Частота вращения барабана ленточного транспортера , об/мин, 60000V л. n б Dб Для задания с цепным транспортером частота вращения звездочки, об/мин, 60000V ц. n ЗВ t z ц зв Примечание - В ряде заданий частота вращения вала исполнительной машины задается. 1.3.2 Рекомендуемые значения передаточных чисел [U] (в скобках приведены максимальные значения) Для цилиндрических колес [UЦИЛ] = 3,0…5,6 (6,3). Для простых планетарных передач [UПЛ] = 3,15…8 (12,5) Для конических колес [UКОН] = 2,0…4,0 (5,6). Для червячных передач [UЧЕР] = 10,0…40,0 (80). Для цепных передач [UЦЕП] = 1,5…3,5 (4,5) Для ременных передач: [UРЕМ] = 1,5…3,0 (4,0) — для клиноременных, [UРЕМ] = 3,0…5,0 (6,0) — для плоскоременных. 1.3.3 Предельные значения частоты вращения вала электродвигателя nЭ = nИМ∙[UОТК]∙[UРЕД], где U ред U U Б Т — для двухступенчатых редукторов и U U U — для трехступенчатых, U Б П Т отк — передаточное число ременных, цепных и других открытых передач; U Б , U Т , U П — передаточное число быстроходной, тихоходной и промежуточной ступеней. n им — частота вращения вала исполнительной машины. Для нашего случая n n n или n , тогда U ред им IV б зв nЭ = nIV ∙[UРЕД]∙[UОТК] = nIV ∙[UКОН]∙[UЦИЛ] ∙[UЦЕП] 11 1.3.4 Выбор электродвигателя В курсовом проекте и домашних заданиях рекомендуется брать электродвигатели трехфазные асинхронные с короткозамкнутым ротором серии 4А (таблицы 1.2 и 1.3). В курсовом проекте форма исполнения электродвигателя выбирается в зависимости от конструктивной увязки с редуктором (горизонтального исполнения, фланцевого типа и др.). Т а б л и ц а 1.2 - Технические данные электродвигателей серии 4А Мощность n , Tпуск Tм акс э Тип двигателя P , кВт Tном Tном об/мин э 1 2 Частота вращения 3000 об/мин 4А71В2УЗ 4А80А2УЗ 4А80В2УЗ 4A90L2У3 4А100S2УЗ 4А100L2УЗ 4А112М2УЗ 4А132М2УЗ 4А160S2УЗ 4А160М2УЗ 4А180S2УЗ 4А180М2УЗ 3 1,1 1,5 2,2 3,0 4,0 5,5 7,5 11,0 15,0 18,5 22,0 30,0 4 5 2810 2850 2850 2840 2880 2880 2900 2900 2940 2940 2945 2945 2,0 2,1 2,1 2,1 2,0 2,0 2,0 1,6 1,4 1,4 1,4 1,4 2,2 2,6 2,6 2,5 2,5 2,5 2,8 2,8 2,2 2,2 2,5 2,5 1420 1415 1425 1435 1430 1445 1455 1460 1465 1465 1470 1470 2,0 2,0 2,0 2,0 2,0 2,0 2,2 2',2 1,4 1,4 1,4 1,4 2,2 2,2 2,4 2,4 2,4 2,2 3,0 3,0 2,3 2,3 2,3 2,3 920 935 950 2,0 2,0 2,0 2,2 2,2 2,2 Частота вращения 1500 об/мин 4А80А4УЗ 4А80В4УЗ 4А90L4УЗ 4А100S4УЗ 4А100L4УЗ 4А112М4УЗ 4А132S4УЗ 4А132М4УЗ 4А160S4УЗ 4А160М4УЗ 4А180S4УЗ 4А180М4УЗ 1,1 1,5 2,2 3,0 4,0 5,5 7,5 11,0 15,0 18,5 22,0 30,0 Частота вращения 1000 об/мин 4А80В6УЗ 4А90L6УЗ 4А100L6УЗ 1,1 1,5 2,2 12 Окончание таблицы 1.2 1 2 4А112МА6УЗ 3,0 4А112МВ6УЗ 4,0 4А132S6УЗ 5,5 4А132М6УЗ 7,5 4A160S6У3 11,0 4А160М6УЗ 15,0 4А180М6УЗ 18,5 4А200М6УЗ 22,0 4A200L6У3 30,0 Частота вращения 750 об/мин 4А90LВ8УЗ 1,1 4А100L8УЗ 1,5 4А112МА8УЗ 2,2 4А112МВ8УЗ 3,0 4А132S8УЗ 4,0 4А132М8УЗ 5,5 4А160S8УЗ 7,5 4А160М8УЗ 11,0 4А180М8УЗ 15,0 4А200М8УЗ 18,5 4А200L8УЗ 22,0 4А225М8УЗ 30,0 3 4 5 955 960 965 970 975 975 975 975 980 2,0 2,0 2,0 2,0 1,2 1,2 1,2 1,2 1,2 2,5 2,5 2,5 2,5 2,0 2,0 2,0 2,0 2,0 700 700 700 700 720 720 730 730 730 735 730 735 1,6 1,6 1,8 1,8 1,8 1,8 1,4 1,4 1,2 1,2 1,2 1,2 1,9 1,9 2,2 2,2 2,6 2,6 2,2 2,2 2,0 2,0 2,0 2,0 Примечания 1 Частоты вращения 3000, 1500, 1000, 750 об/мин синхронные. 2 В графе n указана расчетная (номинальная) частота вращения электро- э двигателя с учетом скольжения. Структура условного обозначения на примере электродвигателя 4А112МВ8УЗ: 4 — порядковый номер серии; А — вид двигателя (асинхронный); 112 — высота оси вращения вала от основания (h — см. таблицу 1.3); М (или S, L) — установочный размер по длине станины; В (или А) — условная длина сердечника статора; 8 — число полюсов (2, 4, 6, 8); У — климатическое исполнение; 3 — категория климатического исполнения. Форма исполнения электродвигателей: М100 — электродвигатели горизонтальные, станина на лапах; М200 — то же и дополнительно с фланцами на щите; М300 — горизонтальные, с фланцем на щите, без лап; М302 — вертикальные, с фланцем на щите, без лап. 13 Т а б л и ц а 1.3 - Основные размеры электродвигателей исполнения M100 Габаритные Тип дви- Число меры, мм гателя полюсов l30 h31 4А71 2, 4, 6, 8 285 201 4А80А 2, 4, 6, 8 300 218 4А80В 2, 4, 6, 8 320 4A90L 2, 4, 6, 8 350 243 4A100S 2, 4, 6, 8 365 265 4A100L 2, 4, 6, 8 395 4А112М 2, 4, 6, 8 452 310 480 4A132S 4, 6, 8 350 4А132М 2, 4, 6, 8 530 2 4A160S 624 4, 6, 8 430 2 4А160М 667 4, 6, 8 2 662 4A180S 4, 6, 8 470 2 4А180М 702 4, 6, 8 2 760 4А200М 4, 6, 8 790 535 2 800 4A200L 4, 6, 8 830 2 810 4А225М 575 4, 6, 8 840 раз- Установочные и присоедиМасса, нительные размеры, мм кг d30 l1 d1 b10 l31 l10 170 40 19 112 45 90 15,1 17,4 186 50 22 125 50 100 20,4 208 50 24 140 56 125 28,7 132 36,0 235 60 28 160 63 140 42,0 260 80 32 190 70 140 56,0 77,0 302 80 38 216 89 178 93,0 42 130,0 178 135,0 48 358 110 254 108 42 145,0 210 48 160,0 48 203 165 55 175 410 110 279 121 48 241 185 55 195 110 55 255 267 140 60 270 450 318 133 110 55 280 305 140 60 310 110 55 355 494 356 149 311 140 65 355 Примечание- d0=7мм при h=71мм;10мм при 80,90мм;12мм при 100,112,130мм. 14 Электродвигатели выбираются по каталогу (табл. 1.2 и 1.3) в соответствии с выбранной мощностью и частотой вращения вала двигателя. Допустим, что мощность электродвигателя Pэ 5,5кВт , а частота вращения вала электродвигателя должна выбираться в пределах 600...1870 об/мин. Этому соответствует nсинхр = 750, 1000, 1500 об/мин (таблица 1.2). Таким образом, мы можем взять три электродвигателя (таблица 1.4). Т а б л и ц а 1.4 - Возможные варианты выбора электродвигателей n , Тип Габарит, Масса, Tмакс P , кВт э кг э Tном электродвигателя мм, (l ) 30 об/мин 56 4А112М4УЗ 5,5 1445 452 2,2 77 4A132S6Y3 5,5 965 480 2,5 4А132М8УЗ 5,5 720 530 93 2,6 Выбор электродвигателя производится на основе ряда требований и, в частности, по габаритам, массе и экономическим соображениям. Наименьший размер и массу имеет первый электродвигатель. Обозначение выбранного электродвигателя — М100: 4А112М4УЗ, P 5,5 кВт, n 1445 об/мин . э э В расчетно-пояснительной записке следует привести эскиз ЭД и указать все его размеры. 1.4 Разбивка передаточных чисел по ступеням передачи 1.4.1 Общее передаточное число привода n u э , об n им где nэ — частота вращения вала электродвигателя, n им — частота вращения вала исполнительной машины (конвейера, силовой установки и др.) В нашем случае nим n IV . 15 При наличии открытой передачи (ременной, цепной и др.) u u u об ред отк . При отсутствии открытой передачи u u об ред . 1.4.2 Разбивка передаточного числа редуктора u ред uоб uотк . В общем случае: для двухступенчатых редукторов u u u , ред Б Т для трехступенчатого редуктора u u u u . ред Б П Т Значением uотк (ременные и цепные передачи) можно задаться (см. п. 1.3.2). Затем необходимо произвести разбивку передаточных чисел по ступеням редуктора. Стандартизованный ряд передаточных чисел: 1 ряд 1 1,25; 1,6; 2,0; 2,5; 3,15; 4,0; 5,0; 6,3; 8,0; 10,0… 2 ряд 1,12; 1,4; 1,8; 2,24; 2,8; 3,55; 4,5; 5,6; 7,1; 9,0… Выбор соответствующей методики разбивки передаточных чисел определяет габариты редуктора по длине и высоте, массу и условия смазки зубчатых колес. Для условия погружения колес в масляную ванну можно воспользоваться следующими рекомендациями: а) для двухступенчатых цилиндрических редукторов горизонтального расположения, выполняемых с развернутой схемой монтажа ступеней u u ; u 1,2...1,3 u ред , Б Б Т где u Б и uТ — передаточные отношения быстроходной и тихоходной ступеней; б) для вертикальных редукторов с развернутой схемой монтажа u u ; u 0,7...0,9 u ред ; Б Т Б 16 в) для соосных редукторов горизонтальных и вертикальных u u ; u u ред ; Б Т Б г) для коническо-цилиндрических редукторов uкон 0,6...0,8 ; u u u u 1,1 u ред или Т цил Б кон uцил д) для цилиндрическо-червячного редуктора u ред u Т uБ , где u Б = 1,6…3,15 передаточное число цилиндрической переда- чи; Пример. Общее передаточное число привода М1 n 1445 u u э 28,9 и u u , об n об ред цеп 50 б * Предварительно принимаем uцеп 1,8 в рекомендуемых пределах uцеп 1,5...3,5 . Тогда передаточное число редуктора u 28,9 u* об 16,05 ред * 1,8 uцеп По рекомендации (см. п. д): u* u* u* . ред цил кон и u* 1,1 16,05 4,4 цил Принимаем по стандартизованному ряду (1-й ряд) uцил 5,0 16,05 * Откуда получаем uкон 5 3,21 . Принимаем по стандартизованному ряду (1-й ряд) u кон 3,15 и уточняем передаточное отношение редуктора u u u 3,15 5,0 15,75 . ред цил кон Тогда u 29 u об 1,85 . цеп u 15 , 75 ред Передаточные числа открытых передач могут быть не стандартными. 17 1.5 Определение кинематических и силовых параметров на валах привода 1.5.1 Определение мощности Направление силового потока – последовательное (рисунок 1) I вал: P P I э м пк 2 ; II вал: P P II э м кон пк P III вал: P III э м ред ; P IV вал: P IV э об Примечание – В приводах с параллельными передачами, например, в многопоточных передачах и с раздвоенными зубчатыми колесами КПД, указанный в таблице 1.1, учитывается только один раз. 1.5.2 Определение частот вращения, об/мин n n , I вал I э II вал n III вал n IV вал n II nэ uкон , III nэ u ред , nэ n . IV б u редuцеп Формула перевода частоты вращения, об/мин, в угловую скорость вращения, рад/сек, n 30 . 1.5.3 Определение крутящих моментов, Нм P 1000 Pi Ti T 9550 i или , i n i i P, кВт , n, об мин; ω,рад/сек; i=I,II,III,IV. где Результаты расчетов свести в таблицу (вид таблицы см. ч.2 данного пособия). 18 2 ВЫБОР МАТЕРИАЛОВ, ДОПУСКАЕМЫХ НАПРЯЖЕНИЙ И РАСЧЁТНЫХ КОЭФФИЦИЕНТОВ 2.1. Предварительный выбор материалов и термической обработки для шестерни и колеса Основным материалом для изготовления зубчатых колес является сталь. Обоснованный выбор марки стали и термической обработки позволит определить оптимальные, с точки зрения техникоэкономических показателей, габариты передачи, а также обеспечит ее долговечность. В начале расчета марка стали и термическая обработка с соответствующими механическими характеристиками выбирается предварительно, следуя рекомендациям по проектированию деталей машин. Затем определяют допускаемые напряжения. После проектного расчета с определением основных размеров передачи и разработки эскизной компоновки привода производят проверочный расчет зубьев на выносливость по контактным напряжениям и изгибу. Результат этих расчетов покажет необходимость выбора новой марки стали и вида ее термической обработки. В таблице 2.1 указаны механические характеристики марок сталей в зависимости от термической обработки и размеров заготовки. Для нормализованных и улучшенных сталей ( H HB350 ) в целях лучшей приработки зубьев и повышения нагрузочной способности косозубых передач твердость шестерни рекомендуют назначать больше твердости колеса: а) для прямозубых колес HB HB HB20...40 , шест кол б) для косозубых колес HB HB HB90...110 . шест кол Для закаленных сталей ( H HB350 ) разность твердостей шестерни и колеса не требуется, т.к. зубья колес в этом случае не прирабатываются. Поэтому, поверхностную твердость зубьев назначают примерно одинаковой H шест H кол . В таблице 2.2 приведены некоторые сочетания марок сталей и термической обработки для шестерни и колеса в зависимости от крутящего момента на колесе ( Tкол ) для одноступенчатых редукторов. Это дает возможность получить для нагруженных зубчатых передач меньшие размеры. 19 Однако, при выборе материалов двух-, трехступенчатых редукторов необходимо также учитывать их кинематические схемы, габаритные ограничения и возможность сборки.. Т а б л и ц а 2.1 - Марки стали, термообработка и механические характеристики Размеры, мм , т Марка НВ сердцеТермоHRC МПа стали вина обработка поверхD S max max ность 35 45 45 45 40Х 40Х 40Х 35ХМ 35ХМ 35ХМ 40ХН 40ХН 40ХН 45Х 45Х 45Х 20ХНМ 18ХГТ 12ХН3А 25ХГМ 40ХНМА 125 80 200 125 125 315 200 200 315 200 200 315 200 200 80 50 125 80 80 200 125 125 200 125 125 200 125 125 210...240 240...290 230...260 300.. .320 300.. .320 230...260 270...300 270...300 230...260 300...320 300...320 230..260 280...300 280...300 — — — — — — 45...50 — — 48...53 — — 50..55 — — 50...55 200 125 300...400 56...63 800 У+ Ц 125 80 270...300 50. ..56 780 У+ А любой любая 140.. .190 любой любая 170...210 265 320 450 580 640 785 785 670 790 790 630 785 785 650 780 780 Н Н У У У У У+ З У У У+ З У У У+ З У У У+ З 45Л 315 200 180...200 — 310 Н Примечания 1 Н — нормализация, У — улучшение, З — закалка ТВЧ, Ц — цементация и закалка ТВЧ, А — азотирование. 2 Dmax —диаметр заготовки колеса, S max — толщина заготовки. 20 Т а б л и ц а 2.2 - Некоторые сочетания марок стали и термической обработки для зубчатых колес одноступенчатых редукторов Условия нагружения T кол , Нм Вид зубьев Прямые < 500 Косые Прямые 500…1500 Косые Зубчатые коМарка стали леса Вид термической обработки шестерня 45 У колесо 35 Н шестерня 40ХН У колесо 45 Н шестерня 40Х колесо 45 шестерня 40ХН колесо 40Х шестерня З У 40ХН Прямые > 1500 У З колесо 40Х шестерня 12ХН3А Ц Косые колесо 20ХНМ В расчетах используется среднее значение твердости материалов шестерни и колеса HB HBmax HBm min 2 21 2.2 Эквивалентное и базовое число циклов нагружения и коэффициент долговечности при расчете зубьев на контактную выносливость При постоянной нагрузке T = const число циклов перемены напряжений N 60nnc t . При переменной нагрузке T = var эквивалентное число циклов перемены напряжений N HE K HE N , где n — частота вращения соответствующего зубчатого колеса, об/мин; nC — число зацеплений зуба за один оборот зубчатого колеса (равно числу колес, находящихся в зацеплении с рассчитываемым); t —срок службы привода в часах (стандартизованный ряд в часах:…5000, 6300, 8000, 10000, 12500, 16000, 20000, 32000…), K HE — коэффициент эквивалентного числа циклов при расчете на контактную выносливость, определяемый по таблице 2.3 или по формулам K HE T ti i Tmax ti mH 2 mH или K HE ki i 2 , где k i и i — параметры графика нагрузки; i = 1, 2, 3… — по числу ступеней графика нагрузки (рисунок 3). T t i i , ki i , T1 t где T1 — наибольший из длительно действующих крутящих моментов на графике нагрузки. По рисунку 3 имеем Tном T1 . При постоянной нагрузке КНЕ=1. Эквивалентное число циклов нагружения зубьев на каждом валу редуктора: I вал N HE160t n1nc K HE , 22 II вал N HE 2 N HE3 III вал N HE1 , U Б N HE1 U Б UТ , Т а б л и ц а 2.3 - Выбор коэффициентов K HE , K FE , m H , mF . При расчете на выносливость при изгибе термообработка K FE 1,000 I — тяжелый 0,500 0,300 улучшение, нормализация 1,000 0,250 6 0,180 IV — легкий 0,125 V — особо легкий 0,063 термо- F обработка 0 — постоянный II — средний равновероятный любая III — средний нормальный m закалка объемная, поверхностная Режим работы При расчете на контактную выносливость термоm K HE H обработка 0,140 6 0,060 0,038 0,013 K m FE F 1,00 0 0,20 0 0,10 0 9 0,40 0 0,01 6 0,00 4 Выбор коэффициента долговечности определяется числом циклов перемены напряжений относительно базового числа циклов N Hо по кривой усталости (показатель степени кривой контактной усталости mH 6 ). Коэффициент долговечности K HL при расчете на контактную выносливость: при N HE N Ho K HL 1 , при N HE N Hо K HL mH N Ho N HE 1 . При этом K HL 2,6 при однородной структуре материала (нормализация, улучшение, объемная закалка), K HL 1,8 для поверхностно23 упрочненных зубьев (поверхностная закалка, цементация, азотирование). Базовое число циклов N Hо определяется по формуле N Hо 30HB 2,4 или по таблице 2.4. Т а б л и ц а 2.4 - Базовое число циклов N Hо ≤215 230 250 270 290 315 340 380 420 465 515 570 630 HB 215 HRC ≤ 20 22 25 28 31 34 37 40 44 48 52 57 61 N Hо , млн.циклов 10 12,5 16 20 25 31,5 40 50 63 80 100 125 150 2.3 Эквивалентное и базовое число циклов и коэффициент долговечности при расчете зубьев на выносливость при изгибе При постоянной нагрузке T = const число циклов перемены напряжений при изгибе определяется также, как при контактных напряжениях (см.п.2.2) N 60nnc t , При переменной нагрузке T = var эквивалентное число циклов перемены напряжений N FE K FE N . K FE — коэффициент эквивалентного числа циклов выносливости при изгибе, определяемый по таблице 2.3 или по формулам m T F t i i T max mF , K или K k FE FE i i t i Показатель степени кривой усталости при изгибе mF определяется по таблице 2.3. При постоянной нагрузке КFЕ=1. 24 Коэффициент долговечности K FL при расчете на выносливость по напряжениям изгиба: при N N FE Fo K FL 1, при N FE N Fî K FL mF N Fo N FE 1. Если mF 6 , то K FL K FL max 4 ; если mF 9 , то K FL K FL max 2,5 . 6 Базовое число циклов N Fо 4 10 для всех сталей. 2.4 Допускаемые напряжения при расчете зубьев на контактную выносливость Величина допускаемых контактных напряжений определяется по формуле H HoSK HL Z R ZV K L K хH , H где Ho - предел контактной выносливости, соответствующий базовому числу циклов перемены напряжений, в зависимости от принятой термообработки (таблица 2.5). Т а б л и ц а 2.5 - Значения пределов контактной выносливости Способ термичеТвердость поской или химиковерхности зубьев Группа стали термичес-кой обраНВ, HRC ботки зубьев Улучшение, нормализация Поверхностная закалка Цементация ≤ HB350 HRC40…56 HRC54…64 Формулы предела контактной выносливости , МПа Ho Углеродистые и 2HBm + 70 легированные стали 17HRC + 200 Легированные стали 25 23HRC S H — коэффициент безопасности. Для объемно-упрочненных зубьев (улучшение, нормализация, объемная закалка) S H 1,1 , для поверхностно-упрочненных зубьев (поверхностная закалка, цементация) S H 1,2 . Z R , Z V , K L , K хH — коэффициенты, учитывающие результирующее влияние на величину допускаемых напряжений шероховатости сопряженных поверхностей зубьев, окружной скорости в зацеплении, смазки зубьев и размеров колес. В домашнем задании и в курсовом проектировании произведение этих коэффициентов можно принять Z R ZV K L K хH 0,9...1,0 . При уточненном расчете значения этих коэффициентов брать из действующих стандартов. Таким образом, получаем H Ho K HL SH 0,9 . Расчетные допускаемые контактные напряжения для передачи в целом принимают (индекс 1 – шестерня, индекс 2 – колесо): а) для прямозубых колес H H min , б) для косозубых и шевронных колес H 0,45 H 1 H 2 . При этом необходимо выполнить условия: H min H 1,25 H min ; H min H 1,15 H min для цилиндрических колес для конических колес В приведенных выше формулах ний [σH]1 и [σH]2 . 26 [σH]min - меньшее из значе- 2.5 Допускаемые напряжения при расчете зубьев на выносливость при изгибе Величина допускаемых напряжений при расчете на выносливость при изгибе определяется по формуле F Fo K FL K FC SF Y Y Y S R хF , где Fo - предел выносливости зубьев при изгибе, соответствующий базовому числу циклов перемены напряжений в зависимости от принятой термообработки (таблица 2.6). Т а б л и ц а 2.6 гиб Способ термической или химико-термической обработки зубьев - Значения пределов выносливости зубьев на из- Твердость поверхности зубь- Группа стали ев НВ, HRC Улучшение, нормализация ≤ HB350 Поверхностная закалка Цементация HRC56…63 HRC45…55 HRC56…62 kFC – Формулы предела выносливости при изгибе , МПа Fo Углеродистые и легированные 1,8∙HBm стали 900 Легированные 650 стали 750…850 коэффициент, учитывающий двухстороннее приложение нагрузки; kFC=1 – для одностороннего приложения нагрузки; kFC=0,7…0,8 – для двухстороннего приложения нагрузки (ревер- сивные передачи, сателлиты планетарных передач и т.п. (большие значения при твердости колес более 350HB); S F 1,75 — коэффициент безопасности при изгибе для всех термообработанных сталей; YS , YR , YхF — коэффициенты, учитывающие концентрации напряжений, шероховатость поверхностей у ножки зуба, размеры зубьев. При приближенном расчете 27 YS YR YхF 1 . При уточненном расчете значения этих коэффициентов брать из действующих стандартов. 2.6 Допускаемые контактные напряжения при кратковременных перегрузках (при пусках ЭД) Кратковременная перегрузка, т.е. крутящий момент Т Т Т max , не учтена при расчете на усталость и может п ном Т ном привести к потере статической прочности зубьев. Поэтому после проверки передачи на сопротивление усталости необходимо проверить статическую прочность зубьев при перегрузках. Расчетные условия для определения допускаемых напряжений. При однородной структуре материала зубьев (нормализация, улучшение, объемная закалка) H max 2,8 Т При поверхностно-упрочненных зубьях (поверхностная закалка, цементация) H max 44 HRC Расчетные допускаемые контактные напряжения при кратковременных перегрузках для передачи в целом принимают так же, как и в п.2.4. 2.7 Допускаемые напряжения изгиба при кратковременных перегрузках F max Fo K FL2max K st При твердости не более HB350 При твердости более HB350 KFLmax=4, Kst=1,3 KFLmax=2,5, Kst=1,2 28 2.8 Расчетные коэффициенты 2.8.1 Коэффициенты ширины шестерни Коэффициент ширины шестерни относительно диаметра делительной bw окружности bd1 d . 1 Этот коэффициент выбирается в зависимости от твердости зубьев и расположения колес относительно опор. При симметричном расположении колес относительно опор bd1 0,8...1,4 , при несимметричном расположении - bd1 0,6...1,2 , при консольном расположении - bd1 0,3...0,6 . Примечания 1 Большие значения при твердости хотя бы одного из колес пары не более HB350; 2 Для шевронных передач bd1 , необходимо увеличить в 1,3... 1,4 раза; 3 В многоступенчатых редукторах для быстроходной, промежуточной и Б П Т тихоходной передач принимают bd1 bd1 bd1 . Коэффициент ширины колеса относительно модуля зацепления b w bm m . n Для прямозубых колес mn =m. Значения bm для зубчатых передач редукторного типа рекомендуют не более: а) bm 30...25 при твердости не более HB350; б) bm 20...15 при твердости более HB350. Коэффициент ширины колеса относительно межосевого расстояния bа . Значения bа стандартизованы: 0,1; 0,125 ; 0,16; 0,25; 0,315; 0,4; 0,5; 0,63; 0,8… Для предварительного расчета редукторов можно принять: 0,315 — прямозубые, 0,4 — косозубые, bа bа bа 0,63 — шевронные передачи, bа 0,2...0,3 — раздвоенная ступень. 29 Для соосных редукторов: 0,4 — тихоходная ступень, 0,25 — быстроходная стуbа bа пень. Указанные коэффициенты должны быть между собой увязаны (знак минус — для внутреннего зацепления): u 1 ba bd1 2 — в пределах указанных выше значений. a ba w bm m n 2.8.2 Коэффициенты расчетной нагрузки K H и K F При расчете на контактную прочность зубьев: K H K H K HV K H . При расчете на прочность зубьев по изгибу: K F K F K FV K F . Эти коэффициенты определяются при проверочных расчетах. При проектных расчетах можно принимать предварительно: K * K * 1...1,25 — при симметричном расположении колес отH F * * носительно опор, K H K F 1,1...1,35 — при несимметричном, K * K * 1,2...1,45 — при консольном. H F Меньшие значения при твердости одного из колес не более HB350. 3 РАСЧЕТ ЦИЛИНДРИЧЕСКИХ ЗУБЧАТЫХ ПЕРЕДАЧ 3.1 Проектный расчет. Определение основных параметров Проектный расчет двух- или трехступенчатого зубчатого редуктора с цилиндрическими колесами проводится только для тихоходной ступени редуктора, а межосевые расстояния быстроходной и промежуточной ступеней принимаются стандартизованными по межосевому расстоянию тихоходной ступени. Для цилиндро-червячных, червячно-цилиндрических и коническоцилиндрических редукторов проектный расчет проводится для всех передач. 30 3.1.1 Межосевое расстояние , мм, T2 p K H a K U 1 3 w a u 2 ba H 2 , где Ka 495МПа K 430МПа a 1 3 1 3 — для прямозубых колес; — для косозубых колес; U=Z2/Z1>1 — передаточное число рассчитываемой ступени зуб- чатой передачи (знак минус — для внутреннего зацепления); , где Z1, Z2– число зубьев соответственно меньшего (шестерни) и большего (колеса) из зубчатых колес, - расчетный крутящий момент на большем зубчатом колесе (колесе), Н∙м: а) для одинарного зацепления расчетный и номинальный крутящие моменты на большем зубчатом колесе равны T2р T2р= T2; Примечание - В случае понижающей частоту вращения передачи (редуктор) большее колесо находится на ведомом валу, а в случае повышающей ( мультипликатор) – на ведущем валу. б) для планетарных, многопоточных и раздвоенных зубчатых передач цилиндрических редукторов номинальный крутящий момент делится на число силовых потоков NС с учетом неравномерности распределения нагрузки Т2р= кС∙ Т2 / NС , где кС – коэффициент, учитывающий неравномерность распределения нагрузки. При наличии устройств выравнивающих нагрузку принимают кС =1,1…1,2, в противном случае кС =1,5…2. ba —предварительно принимают согласно п.2.8.1; H — расчетные значения допускаемых контактных напряжений, МПа (см.п.2.4); K H —принимают по табл. 3.5, либо приближенно согласно п.2.8.2. 31 В начале расчета многоступенчатых передач определяют межосевое расстояние тихоходной ступени и округляют его по стандартизованному ряду чисел. Ряд стандартизованных межосевых расстояний aW, мм: 40, 50, 63, 80, (90), 100, (112), 125, (140), 160, (180), 200, (225), 250, (280), 315, (355), 400, (450), 500. В скобках указаны значения второго ряда чисел. Для двух- и трехступенчатых редукторов с цилиндрическими колесами межосевые расстояния определяются по соотношению: а) для двухступенчатых редукторов: быстроходная ступень a * WБ стандарт aWТ 1,56 1,6 ; б) для трехступенчатых редукторов: промежуточная ступень a * WП стандарт aWТ 1,56 1,6 , быстроходная ступень a * * WБ стандарт aWП 1,56 1,6 . * Значения a WП , a WБ округляются по стандартизованному ряду; в) для соосных редукторов aWБ aWТ 3.1.2 Определение основных геометрических параметров цилиндрических зубчатых колес с внешним зацеплением Модуль зацепления и ширина колеса. bw ba m a В общем случае: n W bm bm Рекомендуемые коэффициенты bа и bm см. п. 2.8.1. 32 В приближенных расчетах m 0,01...0,02 a n w при твердости одного из колес не более 350НВ, mn 0,016 ...0,0315 aw при твердости обоих колес более 350НВ. Значения модуля округляются по стандартизованному ряду. Для прямозубых передач mn=m. При выборе модуля для прямозубых колес надо подбирать та2 aw кие числа, чтобы дробь была целым числом. m Для соосных редукторов a wБ a wТ модуль быстроходной сту пени следует брать примерно на 20% меньше, чем тихоходной ступени m nБ 0,8m nТ . m, мм: 1; (1,25); 1,5; (1,75); 2; (2,25); 2,5; (2,75); 3; (3,5); 4; (4,5); 5; (5,5); 6; (7); 8; (9); 10 мм. Ряд стандартизированных модулей В скобках указаны значения 2-го ряда чисел. Расчетная (рабочая) ширина зубчатого венца колес Определяется по формуле b a . W ba W Числа и угол наклона зубьев Суммарное число зубьев зубчатых колес 2a z z z w cos , 1 2 m n 0 для прямозубых, 8 20 для косозубых, 25 40 для шевронных. Первоначально принимают 10 ( cos10 0,9848 ). Вычисленное значение z округлить до целого числа, после чего уточнить угол . Число зубьев шестерни и колеса (см. рисунок 1) z z 3 U 1 (округлить до целого числа), z4 z z3 . Т 33 Уточняем передаточное число z4 z3 . Проверяем отклонение от заданного передаточного числа U Тфакт U Т U Тфакт U 100 % 4% UТ Диаметры колес Диаметры делительных и начальных окружностей без смещения исходного контура зубьев равны и вычисляются по формулам m z d d m z n 3 , 3 w3 t 3 cos m z d d m z n 4 . 4 w4 t 4 cos Диаметры округлить до сотых долей миллиметра. Проверка : d d4 a 3 . WТ 2 Ширина зубчатого венца колеса b b a кол W ba WТ (результат округлить до целого числа). Ширина зубчатого венца шестерни с целью компенсации возможной погрешности сборки bшест bкол : b b 5...10 мм . шест W 3.1.3 Уточнение расчетных геометрических коэффициентов: а) коэффициент ширины по модулю b bm W , mn б) коэффициент ширины по диаметру шестерни b bd 3 w3 , d w3 в) коэффициент ширины по межосевому расстоянию b w4 . ba aWТ 34 3.1.4 Остальные размеры зубчатых передач Высота зубьев цилиндрических колес: ha mn , высота ножки зуба высота головки зуба полная высота зуба h f 1,25 mn , hha h f 2,25mn . Диаметры зубьев окружностей вершин da и впадин df зубьев зубчатых колес ( i – шестерня ,колесо): Zi d d 2h m 2 , ai wi ai n cos Zi d d 2h m 2,5 , fi wi fi n cos Окружной шаг m n p m t t cos . Толщина зуба по делительной окружности: S pt . 2 Т а б л и ц а 3.1 - Сводная таблица основных геометрических параметров цилиндрической зубчатой косозубой передачи Числовые значения результатов расчета Наименование параметров шестерня колесо Модуль нормальный, мм Число зубьев Угол наклона зуба, ° Направление линии наклона зуба Исходный контур Коэффициент смещения исходного контура Степень точности Диаметр начальной (делительной) окружности, мм Диаметр окружности вершин зубьев, мм mn z3 правое ГОСТ z4 левое х0 8-В* d w3 d a3 bw3 d w4 da4 bw 4 Длина зуба (ширина зубчатого венца), мм Толщина зуба по делительной окружности, мм S Межосевое расстояние, мм aw * В задаче принята одинаковая степень точности по нормам кинематической точности, плавности работы, контакта зубьев; в зацеплении принят гарантированный боковой зазор нормального сопряжения: ст. 8-8-8В или ст. 8-В. 35 3.1.5 Основные геометрические зависимости для прямозубых цилиндрических передач с внутренним зацеплением. Пример таких передач: зубчатая пара корончатое колесо- сателлит в планетарной передаче ( см.ч.2 раздел VI). Межосевое расстояние определяется по формуле: d d a w.кол w.шест w 2 Число зубьев шестерни z шест Число зубьев колеса 2aW m(uТ 1) (округлить до целого числа). z кол 2a w m z шест. Диаметры колес: начальной (делительной) окружности d m z шест(кол) шест(кол) , окружностей вершин зубьев d a.шест d шест 2m ; окружностей впадин зубьев d d 2,5m ; f .шест w.шест d a.кол d d f .кол кол d 2m ; w.кол 2,5m 3.1.6 Усилия в зацеплении цилиндрических передач Окружная сила , Н, (Т, Н·м, d, мм) 2000 T шест F , t d шест F tg W t Радиальная сила Fr cos . Угол зацепления W 20 ( tg 20 0,364 ). — угол наклона зубьев колес (для прямозубых 00 ) . 36 F F tg а t Осевая сила Примечание - В прямозубых передачах Fa 0 , в шевронных передачах осевые силы уравновешиваются на колесе и не передаются на подшипники. Суммарная (нормальная) сила в зацеплении F t F n cos cos . W 3.2 Проверочные расчеты цилиндрической зубчатой передачи 3.2.1 Проверочный расчёт на контактную выносливость активных поверхностей зубьев. По стандартизованной методике расчета (знак «–» относится к внутреннему зацеплению) Ft U 1 H Z M Z H Z K H K H K HV H , U bw d1 где H — фактическое (расчетное) контактное напряжение в полюсе зацепления, МПа; H — допускаемое контактное напряжение, МПа; Ft — окружная сила в зацеплении, Н; bw — ширина колеса, мм; U — передаточное число; Z M , Z H , Z , K H , K H , K Hv — расчетные коэффициенты (см. ниже). Определение расчетных коэффициентов. Z M — коэффициент, учитывающий механические свойства материа1 2 лов; для стальных колес Z M 275МПа . Z H — коэффициент, учитывающий форму сопряженных поверхностей зубьев, определяется по таблице 3.2 или по формуле Z H 1,76 cos . Т а б л и ц а 3.2 - Выбор коэффициента Z H ZH 0 1,76 10 1,74 15 1,71 20 1,67 37 25 1,62 30 1,56 35 1,50 40 1,42 Z — коэффициент, учитывающий суммарную длину контактных линий: ( для прямозубых передач и косозубых при 0,9 bw sin mn — коэффициент осевого перекрытия) 4 3 ; Z для косозубых и шевронных при 0,9 Z 1 . — коэффициент торцевого перекрытия 1 1 cos , z 1 z 2 1,88 3,2 где z1 и z 2 — число зубьев шестерни и колеса. Знак «–» относится к внутреннему зацеплению. K H — коэффициент, учитывающий распределение нагрузки между зубьями для косозубых колес (таблица 3.4) при окружной скорости колес n1 d1 V ,м с, 60 1000 и степени точности по таблице 3.3. Т а б л и ц а 3.3 - Рекомендуемые степени точности по нормам плавности работы Передача Степень точности при окружной скорости V , м/с до 5 от 5 до 10 Цилиндрическая прямо8 зубая Цилиндрическая косозу8 бая Коническая прямозубая 7 7 8 — 38 Т а б л и ц а 3.4 - Выбор коэффициента K H для косозубых колес Значения K H при окружной скорости V , м/с Степень точности 1 2,5 5 10 15 20 25 6 1,00 1,01 1,02 1,03 1,04 1,05 1,06 7 1,02 1,03 1,05 1,07 1,09 1,12 — 8 1,03 1,05 1,09 1,13 — — — Примечание - Для прямозубых колес K H 1 . K H — коэффициент, учитывающий распределение нагрузки по ширине венца зубьев при расчете на контактную выносливость (таблица 3.5). Выбор производится в зависимости от: а) твердости зубьев колеса; b U 1 w ba б) коэффициента ширины зуба bd1 d 2 w1 (знак «–» относится к внутреннему зацеплению); в) расположения колес относительно опор Т а б л и ц а 3.5 - Выбор коэффициентов K H и KF при твердости колеса не более HB350 b bd1 w d w1 Симметричное расНесимметричное рас- Консольное расположение шестерположение шестерни положение однони относительно относительно опор го из колес опор K 0,2 0,4 0,6 0,8 1,0 1,2 1,4 1,6 H 1,0 1,0 1,01 1,03 1,04 1,05 1,07 1,08 K F 1,0 1,01 1,02 1,05 1,08 1,10 1,13 1,16 K H 1,0 1,02 1,04 1,05 1,08 1,10 1,14 1,16 K F 1,01 1,04 1,07 1,10 1,15 1,20 1,25 1,32 K H 1,07 1,15 1,24 1,35 — — — — K F 1,13 1,28 1,50 1,70 — — — — Примечание - При твердости колеса более HB350 см. справочную литературу или увеличить табличные значения K H на 0,1 ÷ 0,15 и K F на 0,12 ÷ 0,17 . 39 K H V — коэффициент, учитывающий динамическую нагрузку, возни- кающую в зацеплении (таблица 3.6). Т а б л и ц а 3.6 - Выбор коэффициента K H V Степень Твердость по- Значения K H V при окружной скорости V , м/с верхности точности зубьев колеса ≤ 1 2 4 6 8 10 7 ≤ HB350 > HB350 8 ≤ HB350 > HB350 1,04 1,02 1,03 1,00 1,04 1,01 1,03 1,01 1,07 1,03 3,05 1,01 1,08 1,02 1,06 1,01 1,14 1,05 1,09 1,02 1,16 1,04 1,10 1,02 1,21 1,06 1,14 1,03 1,24 1,06 1,16 1,03 1,29 1,07 1,19 1,03 1,32 1,07 1,22 1,04 1,36 1,08 1,24 1,04 1,40 1,08 1,26 1,05 Примечания 1 Верхние значения K HV для прямозубых колес, нижние — для косозубых. 2 Для степеней точности 6 и 9 см. справочную литературу. Формулу для расчета фактических контактных напряжений преобразуем, подставив удельную окружную контактную нагрузку F W t k k k Ht b H HV H , Н / мм w В результате получим (знак «–» относится к внутреннему зацеплению) W (U 1) Ht Z Z Z [ ] H H M H d U 1 Результат расчета сравнить с допускаемыми напряжениями. При выполнении соотношения 0,85 H H 1,05 H передача спроектирована оптимально. Если при расчете получено соотношение H 1,05 H , то передача недопустимо перегружена. 40 В этом случае необходимо: 1) увеличить ba , т.е. ширину венца bW ,не меняя межосевое расстояние; 2) увеличить межосевое расстояние, не меняя значение ba ; 3) подобрать новую марку стали или другую термическую обработку, которые обеспечат более высокие допускаемые напряжения зубчатых колес. 3.2.2 Проверочный расчет зубьев на выносливость при изгибе Расчетная формула W F YF Y Y Ft F , mn F - удельная окружная нагрузка при из t k k k Ft b F FV F w гибе, Н/мм, где W m — модуль нормальный (для прямозубых колес mn=m), мм; n b — ширина венца, мм; w , F F — фактические (расчетные) и допускаемые напряжения при изгибе, МПа; K K Y , Y , Y , K F F , F , FV — расчетные коэффициенты (см. ниже). Y — коэффициент, учитывающий форму зубьев: F для прямозубых колес Y f z , F для косозубых колес где zV Y f z , F V z cos3 . Коэффициент формы зуба YF определяется по таблице 3.7 в зависимости от вида зацепления- внешнее или внутреннее. 41 Т а б л и ц а 3.7 - Выбор коэффициента YF Внешнее зацепление z zV 17 20 22 25 28 30 32 37 40 45 50 ≥ 100 YF 4,28 4,08 4,00 3,90 3,82 3,80 3,78 3,71 3,70 3,68 3,65 3,62 3,61 3,60 Внутреннее зацепление 40 50 63 ≥ 70 z 4,02 3,88 3,80 3,75 YF 60 80 Y — коэффициент, учитывающий перекрытие зубьев. Для прибли женных расчетов принимают Y 1 . Y — коэффициент, учитывающий наклон зубьев: для прямозубых колес Y 1, для косозубых колес Y 1 K 140 . F — коэффициент, учитывающий распределение нагрузки между зубьями. Для прямозубых колес K F 1 . Для косозубых передач при степени точности 6 — K F 0,72 , при степени точности 7 — K F 0,81 , при степени точности 8 — 1,02 . K 0,91 , при степени точности 9 — K F F K F — коэффициент, учитывающий распределение нагрузки по ширине зубчатого венца при изгибе, определяется по таблице 3.5. K FV — коэффициент, учитывающий динамическую нагрузку при изгибе, возникающую в зацеплении, определяется по таблице 3.8. 42 Т а б л и ц а 3.8 - Выбор коэффициента K FV Твердость по- Значения K V Степень FV при окружной скорости верхности точности 2 4 6 8 зубьев колеса ≤ 1 ≤ HB350 7 > HB350 ≤ HB350 8 > HB350 1,08 1,03 1,03 1,01 1,10 1,03 1,03 1,01 1,16 1,06 1,05 1,02 1,20 1,06 1,06 1,02 1,33 1,11 1,09 1,03 1,38 1,11 1,12 1,03 1,50 1,16 1,13 1,05 1,58 1,17 1,16 1,05 , м/с 10 1,80 1,27 1,22 1,08 1,96 1,29 1,26 1,08 1,67 1,22 1,17 1,07 1,78 1,23 1,21 1,07 Примечания 1 Верхние значения K F V для прямозубых колес, нижние — для 2 Для степеней точности 6 и 9 см. справочную литературу. косозубых. Окончательная проверка выносливости зубьев по напряжениям из F гиба проводится для того из двух колес, у которого отношение Y F меньше. Значительная недогрузка по напряжению от изгиба может быть уменьшена в общем случае за счет уменьшения модуля зацепления. Однако, уменьшение модуля может привести к нарушению рекомендаций по его выбору, поэтому пересчет производить не стоит. 3.2.3 Проверочный расчет цилиндрической зубчатой передачи на кратковременную перегрузку Расчетные максимальные контактные напряжения Tmax H max H Tном H max , где H — фактическое контактное напряжение, МПа; Tmax — пусковая характеристика выбранного электродвигателя сеTном рии 4А (см. п. 1.3.4). Tmax Расчет на прочность при изгибе F max F Tном F max , где F — фактическое напряжение изгиба, МПа. 43 4 РАСЧЕТ КОНИЧЕСКОЙ ПЕРЕДАЧИ 4.1 Проектный расчет прямозубой конической передачи 4.1.1 Расчетные коэффициенты конических зубчатых передач Коэффициент ширины шестерни относительно среднего диаметра bd1 при консольном расположении шестерни относительно опор вала bd1 bw 0,3...0,6 . d1 Большие значения bd1 при твердости хотя бы одного из колес пары не более HB350. Коэффициент ширины шестерни относительно торцевого модуля b w 10 : . bm m bm е Это условие ограничивает уменьшение модуля зуба с увеличением b при приближении к вершине конуса, что может привести к поломке при перекосе зубьев. Коэффициент ширины шестерни относительно конусного расстояb w 0,315 K ния K bе : . be R е Примечание - Допускается использовать вместо K be обозначение be . Предварительно следует принять K bе 0,285 с последующим его уточнением. 4.1.2 Диаметр внешней делительной окружности колеса, мм, d e 2 1000 3 T2 K H* U 1 Kbe Kbe H 2 где T2 - крутящий момент на большем коническом колесе, Нм; K * H принимают по таблице 4.3, либо приближенно для консольного закрепления (см. п. 2.8.2); U — передаточное число конической передачи; H — допускаемое контактное напряжение для прямозубых колес, МПа (см. п. 2.4 а). При K be 0,285 формула упрощается 44 d e2 1730 T K * U 2 H 3 H 2 . Значения T2 , U принять из кинематического расчета. Ближайшее значение d e2 , мм, принять по стандартизованному ряду (как и aW ): 40, 50, 63, 80, (90), 100, (112), 125, (140), 160, (180), 200, (225), 250, (280), 315, (355), 400 В скобках даны значения второго ряда. При определении d e2 для коническо- цилиндрических редукторов необходимо учитывать компоновку передач с тем, чтобы ведомое коническое зубчатое колесо не задевало третий вал (см. рисунок 1). Поэтому необходимо, вначале определить d e2 из габаритных ограничений, а затем подобрать материал и выполнить проверочные расчеты. Т а б л и ц а 4.1 - Рекомендуемые основные стандартизованные параметры конических передач по ГОСТ 27142-86 Номинальные передаточные числа U 1,8 2,0 2,24 2,5 2,8 3,15 3,55 4,0 d , мм e2 Ширина конического колеса bW, мм 100 16 16 16 15 15 15 — 112 18 18 17 17 17 17 — 125 20 20 19 19 19 19 19 18 140 22 22 22 21 21 21 21 21 160 26 25 25 25 24 24 24 24 180 30 28 28 28 28 26 26 26 200 32 32 32 30 30 30 30 30 225 36 36 36 34 34 34 34 32 250 40 40 40 38 38 38 38 36 280 45 45 45 42 42 42 42 42 315 50 50 50 48 48 48 48 45 355 60 55 55 55 55 55 52 52 400 65 63 63 60 60 60 60 60 45 4.1.3 Определение основных геометрических размеров прямозубых конических зубчатых колес Определяем ширину конического колеса bW при kbe =0.285 по таблице 4.1 или по формуле 1U 2 b K R K d w be e be e2 2U * Предварительно принимая bm 10 , находим me по формуле и уточняем по стандартизованному ряду (также как mn в цилиндрических передачах). Модуль внешний делительный b m W . e * bm Допускается применение нестандартных модулей me, если это не связано с применением специального инструмента. При нарезании зубьев на зубострогальных станках модули могут быть нестандартными и дробными. d e2 Число зубьев колеса z2 me . Округляем z2 до целого числа. z2 z Число зубьев шестерни 1 U . Также округляем z1 до целого числа. Уточняем de2 de2 z2 me . Фактическое передаточное число: z U 2 . z1 ф Проверяем отклонение от заданного передаточного числа U U U ф U 100 % 4% В дальнейших расчетах полагаем U U ф . 46 Внешний делительный диаметр шестерни de1 z1me . Внешнее конусное расстояние 2 1 U 2 2 2 2 R 0,5 de1 de2 0,5m z1 z2 d e e e2 2U . Углы 1 и 2 составят: tg U , arctgU , 2 2 190 2 . Уточняем расчетные геометрические коэффициенты b W 10 ; bm m e b W 0,3...0,6 ; bd1 d 1 b K W 0,315 . be R e 47 Средние делительные диаметры шестерни (индекс i=1) и колеса (индекс i=2) di m zi , где m — средний делительный модуль m me 10,5Kbe . 4.1.4 Остальные геометрические параметры прямозубых конических колес Для геометрического расчета принимаем: а) осевая форма зуба: 1-я форма — нормально понижающиеся зубья, когда вершины делительного (начального) и внутреннего конусов совпадают; б) исходный контур: стандартизованный, W 20 ; в) коэффициент смещения х = 0. Геометрические зависимости для конических зубчатых колес с косыми (тангенциальными) и спиральными зубьями см. в справочной литературе. Высота головки зуба на внешнем делительном диаметре hae me . Высота ножки зуба на внешнем делительном диаметре h fe 1,2me . Высота всего зуба на внешнем делительном диаметре he hae h fe 2,2me . Диаметры вершин и впадин зубьев на внешнем делительном диаметре (для шестерни индекс i=1, для колеса i=2): daei dei 2hae cos i me Zi 2cos i , d fei dei 2h fecos i me Zi 2,4cos i . 48 Толщина зуба по дуге внешнего делительного конуса p m e e S , e 2 2 где pe — шаг окружной делительный. Т а б л и ц а 4.2 - Сводная таблица основных геометрических параметров конической зубчатой передачи (быстроходная ступень) Числовые значения результатов Наименование параметров шестерня колесо расчета Внешний модуль, мм me z 1 Число зубьев Тип зуба Осевая форма зуба Исходный контур Коэффициент смещения контура Степень точности z 2 прямой 1 стандартизованный w 20 исходного х = 0 Ст.7-В Внешний делительный диаметр, мм d e1 de2 Внешний диаметр вершин зубьев, мм dae1 d ae2 Средний делительный диаметр, мм d 1 d Толщина зуба по дуге внешнего дели- S e тельного конуса, мм bw Ширина колес, мм Угол делительного конуса, ° 1 Внешнее конусное расстояние, мм Re 2 2 4.1.5 Усилия в зацеплении конических колес Для прямозубой передачи: а) среднее окружное усилие на шестерне и колесе, Н, 2000 T1 F F F t t1 t2 d1 , где Т1 – крутящий момент на шестерне ( на I валу) , Н∙м. 49 б) радиальная сила на шестерне (колесе) F F tg cos ,Н r1(2) t 1(2) , где 20 ; в) осевая сила на шестерне (колесе) F F tg sin ,Н a1(2) t 1(2) , Отметим, что Fa1 Fr 2 , а Fa2 Fr1 Примечание- Для передач с косыми и круговыми зубьями формулы для определения сил в зацеплении см. справочную литературу. 4.2 Проверочный расчет конической прямозубой передачи 4.2.1 Проверочный расчет зубьев на контактную выносливость Расчет прямозубых колес ведется по формуле T2 K H K HV U 31620 H . H 3 1 Kbe Kbe de2 где T2 — крутящий момент на большем колесе , Нм; d — внешний делительный диаметр, мм; e2 U — фактическое передаточное число конической передачи; H и H — соответственно фактическое (расчетное) и допускаемое контактные напряжения, МПа; K K H , Hv — расчетные коэффициенты ; K — коэффициент ширины колеса по Re (см. п. 4.1.3). be K H — коэффициент неравномерности нагрузки по длине зуба вы- бирается по таблице 4.3 в зависимости от вида опор (подшипников качения) валов и отношения bd1 50 Kbe 1U 2 2 Kbe . Т а б л и ц а 4.3 - Выбор коэффициента K H при твердости колеса не более HB350 Относительная ширина Опоры валов bw Kbe 1U 2 bd1 d 2 Kbe 1 Шариковые опоры Роликовые опоры 0,2 0,4 Значения K H 1,07 1,14 1,04 1,08 0,6 0,8 1,0 1,23 1,13 1,34 1,18 — 1,23 Примечание - При твердости колеса более HB350 см. справочную литературу или увеличить табличные значения K H на 0,20 ÷ 0,25. K HV — коэффициент динамичности, выбирается по таблице 3.6 при степени точности условно пониженной на одну ступень против фактической в зависимости от средней окружной скорости V1 , м/с d n 1 1 V 1 60 1000 . При определении H в случае перегрузки H 1,05 H или недогрузки H 0,85 H , рекомендуются аналогичные корректировки, что и для цилиндрических передач (см. п. 3.2.1) , приняв вместо межосевого расстояния размер de2, а вместо ψba параметр kbe. 4.2.2 Проверочный расчет зубьев на выносливость при изгибе Ft K F K FV YF F F , 0,85m bw где Ft 2000 T1 d1 — окружное усилие, Н; m — средний делительный модуль, мм; bw — расчетная ширина колес , мм; 51 F и F — соответственно фактическое (расчетное) и допускаемое напряжения на выносливость при изгибе, МПа; K K Y F , FV , F — расчетные коэффициенты . K F — коэффициент неравномерности нагрузки по длине зуба, вы- бирается по таблице 4.4. Т а б л и ц а 4.4 - Выбор коэффициента K F при твердости колеса не более HB 350 Относительная ширина bw Kbe 1U 2 bd1 d 2 Kbe 1 Опоры валов Шариковые опоры Роликовые опоры 0,2 0,4 Значения K F 1,13 1,29 1,08 1,15 0,6 1,47 1,35 0,8 1,70 1,45 1,0 — — Примечание - При твердости колеса более HB350 см. справочную литературу или увеличить табличные значения K F на 0,20 ÷ 0,25. K FV — коэффициент динамичности, выбираемый по таблице 3.8 по тем же параметрам, что и K HV ; Y — коэффициент формы зуба, выбирается по таблице 3.7 в завиF симости от числа зубьев эквивалентного колеса zV : z1(2) zV 1(2) cos 1(2) . Проверку выносливости зубьев на изгиб выполняем для того из F колес, для которого отношение Y меньше. F 4.2.3 Проверка прочности зубьев на кратковременную перегрузку ( см.п.3.2.3). 52 РАЗДЕЛ II РАСЧЕТ ЦЕПНОЙ ПЕРЕДАЧИ ПРИВОДА ПЕРВОЙ МОДИФИКАЦИИ (М1) Исходные данные для расчета 1) Конструктивное исполнение — открытая цепная передача. 2) Кинематическая схема - составить самостоятельно в соответствии с техническим заданием (ТЗ) на проектирование с указанием угла наклона линии центров передачи , условий и режимов ее эксплуатации 3) Мощность P1 , частота вращения n1 крутящий момент T1 на ведущей (малой) звездочке: P1 PIII , Вт , n1 nIII , об мин , T1 TIII , Н м . 4) Передаточное число U U цеп . 5) Срок службы t , час, и параметры ступенчатого графика нагрузки ( см.раздел I) t n1 z1 d2 da2 n2 ψ β d1 da1 z2 а 53 1 ВЫБОР ВИДА ЦЕПНОЙ ПЕРЕДАЧИ И ОПРЕДЕЛЕНИЕ ЕЕ ПАРАМЕТРОВ 1.1 Выбор вида цепи В понижающих частоту вращения приводах машин цепную передачу устанавливают между тихоходным валом редуктора и приводным валом исполнительного механизма (устройства) машины. Это обусловлено тем, что по сравнению с ременными передачами, цепная передача обладает большей нагрузочной способностью, но повышенные динамические нагрузки (соударение шарниров с зубьями звездочек), износ и шум передачи огранивают высокие скорости цепи. Однако, в проектируемых приводах эти скорости не настолько высоки, чтобы использовать трудоемкие зубчатые цепи. Поэтому применим стандартизованные приводные роликовые цепи однорядные (ПР) и многорядные (2ПР, 3ПР, 4ПР) . Параметры некоторых приведены в таблицах 1.1 и 1.2. Выбор количества рядов цепи является задачей оптимизации проектируемого привода, т. к. однорядная цепь приводит к увеличению длины цепи и соответственно габаритов привода. Использовать четырехрядную цепь не рационально из-за большой неравномерности передаваемой нагрузки между рядами цепи, что в расчетах учитывается коэффициентом рядности цепи: K ряд 1 — для однорядной; K ряд 1,7 — для двухрядной; K ряд 2,5 — для трехрядной; K ряд 3,0 — для четырехрядной. Поэтому в расчетах желательно параллельно рассмотреть цепи с различным числом рядов (ПР, 2ПР и 3ПР), а затем выбрать оптимальный вариант, в частности, по габаритам привода. Обычно в заданиях на проектировочные расчеты ограничений по габаритам привода не задано. Тогда первоначально можно выбрать шаг t однорядной цепи одним из методов (см.ниже), а затем по результатам проверочных расчетов скорректировать шаг и число рядов цепи . 54 Т а б л и ц а 1.1 - Цепи приводные роликовые однорядные типа ПP, двухрядные - 2 ПР и трехрядные - 3 ПР ( по ГОСТ 13568-97) Обозначение цепи Fразр, кН Aш , мм2 В, мм не более q, кг/м не менее ПР-8-4,6 4,6 11 12 0,20 ПР-9, 525-9,1 9,1 28 17 0,45 ПР-12, 7-9-1 9 16,5 8,7 0,30 ПР-12, 7-9 9 21 12 1,35 ПР-12, 7-18-1 18 40 19 0,65 ПР-12, 7-18* 18 50 21 0,75 ПР-15, 875-23-1 23 51 20 0,80 ПР-15, 875-23* 23 67 24 1,0 ПР-19, 05-32* 32 106 33 1,9 ПР-25, 4-57* 57 178 39 2,6 ПР-31, 75-89* 89 260 46 3,8 ПР-38, 1-127* 127 395 58 5,5 ПР-44, 45-172* 172 470 62 7,5 ПР-50, 8-227* 227 642 72 9,7 2ПР-12,7-31,8 31,8 100 35 1,4 2ПР-15, 875-46 46 134 41 1,9 2ПР-19, 05-64 64 212 54 3,5 2ПР-25, 4-114 114 356 68 5,0 2ПР-31, 75-177 177 520 82 7,3 2ПР-38, 1-254 254 790 104 11,0 2ПР-44, 45-344 344 940 110 14,4 2ПР-50, 8-454 454 1284 130 19,1 3ПР-12, 7-45,4 45,4 150 50 2,0 3ПР-15, 875-69 69 201 57 2,8 3ПР-19, 05-96 96 318 86 5,8 3ПР-25, 4-171 171 534 98 7,5 3ПР-31, 75-266 266 780 120 11,0 3ПР-38, 1-381 381 1185 150 16,5 3ПР-44, 45-517,2 517,2 1410 160 21,7 3ПР-50, 8-680,4 680,4 1926 190 28,3 Обозначения: шаг цепи, мм, далее статическая разрушающая нагрузка, в кН , далее цифра 1 означает уменьшенный габарит цепи по ширине; Аш — площадь проекции опорной площади шарнира (условная площадь), В — габарит цепи по ширине, q — масса 1 м цепи (погонная масса кг/м). * Цепи, которые изготавливают двухрядными и трехрядными. 55 Т а б л и ц а 1.2 - Параметры, общие для однорядных, двухрядных и трехрядных цепей Шаг цепи t .мм BBH l p db dp 8,0 9,525 12,7 15,875 19,05 25,4 31,75 38,1 44,45 50,8 3,00 5,72 2,4 ÷ 7,75 6,48 ÷ 9,65 12,7 15,88 19,05 25,4 25,4 31,75 2,31 3,28 3,66 ÷ 4,45 5,08 5,96 7,95 9,55 11,1 12,7 14,29 5,00 6,35 7,75 ÷ 8,51 10,16 11,91 15,88 19,05 22,23 25,70 28,58 h 7,5 8,5 10,0 ÷ 11,8 14,8 18,2 24,2 30,2 36,2 42,4 48,3 Обозначения: BBH — расстояние между внутренними пластинами цепи, мм l p — длина ролика, мм, d b — диаметр валика (оси) шарнира, мм, d p — внешний диаметр ролика, мм, h — ширина пластины, мм. 1.2 Выбор числа зубьев звездочек Для повышения плавности работы, долговечности и уменьшения шума в передачах со средними скоростями ( Vц 2 6 м с и U 1 5 ) число зубьев малой звездочки рекомендуют выбирать по эмпирической зависимости z 29 2U z 19 . 1 1 min Для более тихоходных передач ( Vц 2 м с ) число зубьев малой звездочки допустимо уменьшить до z1 min 11...15 . Число зубьев ведомой звездочки z 2 z1 U 120 . Результат округлить до целого числа с наименьшей погрешностью по U. Примечание - Рекомендации по выбору чисел z1 и z 2 с учетом числа звеньев цепи Lt неоднозначны. Однако, для более равномерного износа зубьев и цепи назначаем z1 и z 2 нечетными, выбрав Lt — четным числом. 56 1.3 Предельный шаг цепи Стандартные цепи построены так, что с увеличением шага цепи увеличиваются ее статическая прочность и площадь опорной поверхности шарнира, а, следовательно, и нагрузочная способность. С другой стороны, увеличение шага цепи приводит к повышенным динамическим нагрузкам и шуму передачи, особенно, при высоких скоростях цепей. По этим причинам шаг цепи ограничивают в зависимости от быстроходности передачи (таблица1.3). Таблица 1.3 - Предельные значения шага цепи tmax в зависимости от частоты вращения ведущей звездочки n1, 2500 1250 1000 900 800 630 500 400 300 об/мин tmax, 9,525 12.70 15.87 19.05 25.40 31.75 38.10 44.45 50.80 мм 1.4 Корректирующие коэффициенты z01 K 1.4.1 Коэффициент числа зубьев z z , 1 где z01 25 — число зубьев малой звездочки типовой передачи. n01 K 1.4.2 Коэффициент частоты вращения n n , 1 где n01 — частота вращения малой звездочки типовой передачи. В расчет принимаем n01 , ближайшую по величине к n1 , об/мин, из ряда чисел в таблице1.5: 50; 200; 400; 600; 800. 1.4.3 Коэффициент условий эксплуатации K K K K K K K э д а н рег реж с , K — коэффициент динамичности (характера) нагрузки: д K 1,0 — нагрузка равномерная или близкая к ней ( для ленточных д конвейеров, насосов, компрессоров и т. п); 57 K 1,2 1,8 — нагрузка переменная, с толчками: д для цепных транспортеров K д 1,3 ; для трансмиссий, смесителей, мешалок, мельниц и т.п. K д 1,5 ; при сильных ударах — для молотковых дробилок, барабанных грохотов и т. п. принять K д 1,8 . K a — коэффициент межосевого расстояния a : Kа 1 при a 30 50 t , Kа 1,25 при a 25 t , K а 0,8 при a 60 80 t . K H — коэффициент наклона цепи к линии горизонта: K 1 при угле 60 . н K 1,25 при угле 60 . н K K — коэффициент способа регулировки натяжения цепи: рег 1,0 — периодическое натяжение цепи положением одной из рег звездочек; K 1,1 — натяжение отжимной звездочкой или натяжным ролирег ком; K 1,25 — натяжение нерегулируемое. рег K — коэффициент, учитывающий режим (сменность) реж работы: K 1 — односменный, реж K 1,25 — двухсменный, реж K 1,45 — трехсменный. реж K можно условно принять в зависимости от типового режима реж нагружения: 0, I, II — трехсменная работа, II, III, IV — двухсменная работа, IV, V — односменная работа. 58 При ступенчатом режиме нагружения (эквивалентном заданному графику нагрузки) типовой режим нагружения можно выбрать по таблице 1.4 в зависимости от коэффициента эквивалентности K H E (см.раздел I п.2.2). Таблица 1.4 - Выбор типового режима работы по коэффициенту K H E K HE 1,0 0,500 0,250 0,180 0,125 0,063 Типовой режим нагружения 0 I II III IV V (работы) Примечание - Пояснение типовых режимов работы см. Раздел I, рис. 2. K — коэффициент смазки, учитывающий ее качество и среду с эксплуатации. Т. к. передача открытая, то среда эксплуатации запыленная, а качество смазки удовлетворительное, обеспечиваемое густым внутришарнирным смазыванием через 120 ÷ 180 часов при скорости цепи Vц 4 м с или капельно (20 капель/мин) при Vц 7 м с . В этом случае K 1,3 . с При сильной запыленности или возможности загрязнения цепи необходимо периодическое внутришарнирное смазывание через 6 ÷ 8 часов: K 1,8 при Vц 4 м с , с K 3 при Vц 4 7 м с . с Если передача работает в отсутствии пыли при V 4 м с , то при ц капельном смазывании (4 ÷ 10 капель/мин) K 0,8 ; с при густом внутришарнирном смазывании через 120 ÷ 180 часов — K 1,0 . с Однако, добиться таких условий для открытой передачи затруднительно. Поэтому предварительно можно принять K 1,3 . с 59 1.5 Методики выбора цепи 1.5.1 Выбор цепи по условному давлению в шарнире * Формула для предварительного определения шага t , мм, роликовой цепи имеет вид t * 28 3 где T1 K э z1 [ po ]m , m - число рядов цепи; K - коэффициент эксплуатации; э Т1- крутящий момент на малой звездочке, Н.м; [ p o ] - допускаемое давление в шарнирах типовой цепи, МПа, по таблице 1.5. Т а б л и ц а 1.5 - Допускаемое условное давление p0 в шарнире роликовой цепи для типовой передачи при z1 15 30 n01 , об/мин 50 200 400 600 800 p0 , МПа 12,7 ÷ 15,875 35,0 31,5 28,7 26,2 24,2 при t, мм 19,05 ÷ 25,4 35,0 30,0 26,6 23,4 21,0 31,75 ÷ 38,1 35,0 26,2 24,2 21,0 18,5 44,45 ÷ 50,8 35,0 21,7 21,0 17,5 15,0 Т.к. величина шага пока не известна, в формулу подставляем среднее значение давления при минимально и максимально возможном шаге , соответственно, при 12,7мм и 50,8 мм при заданной частоте вращения звездочки. Окончательно, по таблице 1.1. выбираем стандартную цепь, шаг которой не должен превышать предельных значений (таблица 1.3). 1.5.2 Выбор цепи по расчетной мощности передачи Определяют расчетную мощность проектируемой передачи по формуле, кВт, P P K K K , расч 1 э z n где Р1- мощность на малой звездочке, кВт. 60 Затем выбирается цепь по таблице 1.6, исходя из требуемого Pрасч, при соблюдении условия Pрасч K ряд [ Pрасч ] , где [Pрасч] — допускаемая расчетная мощность типовой однорядной передачи по таблице 1.6. Если однорядная цепь недостаточна или имеет слишком большой шаг (см.таблицу 1.3) , то, варьируя коэффициентами Кряд = 1; 1,7; 2,5 , выбираем многорядную цепь. Таблица 1.6 - Допускаемая расчетная мощность, [Pрасч], кВт, при z01 25 и n01 типовых однорядных передач Обозначение цепи ГОСТ 13568-97 ПР-12, 7-9-1 ПР-12, 7-18-1 ПР-12, 7-18 ПР-15, 875-23-1 ПР-15, 875-23 ПР-19, 05-32 ПР-25, 4-57 ПР-31, 75-89 ПР-38, 1-127 ПР-44, 45-172 ПР-50, 8-227 Частота вращения малой звездочки n01 , об/мин 50 0,19 0,35 0,45 0,57 0,75 1,41 3,20 5,83 10,5 14,7 29,9 200 0,68 1,27 1,61 2,06 2,70 4,80 11,0 19,3 34,8 43,7 68,1 400 1,23 2,29 2,91 3,72 4,88 8,38 19,0 32,0 57,7 70,6 110,0 600 1,69 3,13 3,98 5,08 6,67 11,4 25,7 42,0 75,7 88,3 138,0 800 2,06 3,86 4,90 6,26 8,22 13,5 30,7 49,3 88,9 101,0 157,0 1.5.3 Выбор цепи при габаритных ограничениях В этом случае шаг цепи определяется из геометрических соображений с последующим проверочным расчетом. Например, в рассматриваемом приводе М1 для удобства монтажа и уменьшения габаритов исполнительного механизма рационально принять делительный диаметр большей (ведомой) звездочки в пределах d 2* 0,9 1,2 D , D — для барабана ленточного конвейера; где диаметр D б Dзв — для звездочки цепного конвейера. 61 Тогда предварительное значение шага цепи , мм, 0 t * D sin 180 t z 2 max Далее, по таблице 1.1. выбираем стандартную цепь, шаг которой не должен превышать предельных значений (таблица 1.3). В качестве габаритного ограничения часто используют межосевое расстояние, и предварительное значение шага цепи в этом случае рекомендуют принимать по соотношению t* a / 30...50 , мм 1.6 Геометрические параметры цепной передачи Диаметры делительных окружностей звездочек определяют по формуле ( i=1,2 ), мм, d i t 180 . sin zi Минимальное межосевое расстояние, мм, ограничивается минимально допустимым зазором между звездочками (30...50 мм): amin где dai d a1 d a 2 30...50 , 2 - диаметры вершин звездочек, мм, (i=1,2 ) d 0 t 0,5 ctg 180 , ai Zi По соображениям долговечности цепи на практике рекомендуют принимать a 30...50 t. . Число звеньев цепи (длина цепи в шагах) 2a z1 z 2 z 2 z1 t * 100 120 Lt . t 2 2 a Полученное значение округлить до целого четного числа уточнить межосевое расстояние. 62 Lt и z z2 z z2 t z z1 a L 1 L 1 8 2 расч 4 t t 2 2 2 2 2 . Монтажное межосевое расстояние из условия нормального провисания цепи, мм, a a , монт расч где a 0,002 0,004 a расч . a a монт принять целым числом в пределах a min a a max . монт монт монт Величину 2 ПРОВЕРОЧНЫЙ РАСЧЕТ ЦЕПНОЙ ПЕРЕДАЧИ При несоблюдении приведенных ниже условий необходимо изменить шаг или число рядов цепи и скорректировать проектировочные расчеты. 2.1 Проверка долговечности цепи Число ударов цепи, с-1 z n 508 1 1 . 15Lt Размерность в формуле: t n1, об/мин; t, мм. 2.2 Проверка на отсутствие резонансных колебаний цепи Критическая частота вращения малой звездочки, об/мин,: P1 9,510 5 n n , кр1 z a 1 1 монт Vц q где q — погонная масса цепи, кг/м (таблица 1.1); t z n1 V ц 601000 - средняя скорость цепи, м/с. Размерность в формуле: Р1 , кВт; амонт, мм 63 2.3 Проверка цепи по запасу прочности при кратковременной перегрузке Натяжение ведущей ветви цепи при кратковременной перегрузке F K F F , 1 max П t f T K П max - кратность перегрузки (пусковая характеристика T электродвигателя); где P 2000 Т1 Ft 1 Vц d1 - окружная сила, передаваемая цепью, Н; F 103 a q g K , Н — натяжение от провисания f расч f (силы тяжести) ведомой ветви цепи ( a р а с ч ,мм, g = 9,81 м/с2 — ускорение свободного падения); K f 1 5 cos 2 — коэффициент, учитывающий наклон линии центров звездочек к линии горизонта. Коэффициент запаса прочности цепи S S F разр F1max S 7 0,25 t n1 10 3 , где t, мм; n1, об/мин. 2.4 Проверка цепи на износостойкость по условному давлению Из условия не выдавливания смазочного материала в шарнирах цепи, условное давление в шарнире цепи Ft p p p 0 , Aш Kэ где А — площадь шарнира по таблице 1.1; ш p0 — допускаемое условное давление в шарнире цепи, определяемое по таблице 1.5 для выбранной цепи. 64 3 НАГРУЗКИ В ВЕТВЯХ ЦЕПИ И НА ВАЛЫ ЗВЕЗДОЧЕК y ψ φ FВ F1 β γ ψ x F2 Натяжение ведущей ветви цепи при номинальном режиме работы F K F F F , 1 д t V f где K д — коэффициент динамичности (см. п. 1.4); FV q V 2 Н — центробежная сила; q, кг/м — по таблице 1.1; Натяжение ведомой ветви F2 FV F f . Нагрузка на валы где F F12 F22 2 F1 F2 cos2 , В d 2 d1 , arcsin 2 a 2 — угол между ветвями цепи, a a расч . 65 Угол между вектором FB и линией центров передачи F1 F2 sin . F F cos 2 1 arctg Угол наклона вектора F В к горизонту , где — угол наклона цепи к горизонту. Величины F В и используют в уточненных расчетах вала редуктора, предварительно разложив F В на горизонтальную F F cos Bx В и вертикальную F F sin составляBy В ющие. Отметим, что для цепной передачи, работающей по принципу зацепления, а не трения, величина Ff не имеет такого решающего влияния, как для ременной передачи. Обычно Ff составляет всего несколько процентов от Ft. Для распространенных на практике тихоходных и среднескоростных передач (V < 10 м/с) Ff составляет не более 5% от Ft, а FV - не более 0,5% от Ft. При этом в практических расчетах можно принимать F 0 2 Тогда и ; F F K F B 1 д t F F cos Bx 1 F F sin By 1 66 РАЗДЕЛ III РАСЧЕТ ЧЕРВЯЧНОЙ ПЕРЕДАЧИ ПРИВОДА ВТОРОЙ МОДИФИКАЦИИ (М2) Условия задачи Рассчитать одноступенчатую червячную передачу с архимедовом червяком (ZA), входящую в привод к ленточному или цепному транспортеру. Исходные данные для расчета 1) Кинематическая схема привода М2 (рисунок 1). Привод второй модификации состоит из электродвигателя 1, ременной передачи 2, одноступенчатого червячного редуктора 3 и компенсирующей муфты 4, соединяющей выходной вал редуктора с приводным валом барабана ленточного конвейера 5. Принятые на схеме нагрузочные и кинематические обозначения: P PI , PII , PIII — мощность на валах передачи, кВт; э n nI , n II , nIII — частота вращения валов, об/мин; э T TI , TII , TIII — крутящий момент на валах, Нм; э N I , N II , N III — число циклов нагружения валов; z1 — число заходов червяка; z 2 — число зубьев червячного колеса. 2) Усилие на ленте F л или на цепи Fц транспортера, Н. 3) Линейная скорость ленты V л или цепи Vц , м/с. 4) Диаметр барабана ленточного транспортера Dб , мм или шаг цепи звездочки t, мм и Z зв — число зубьев звездочки транспортера. 5) Режим нагружения и суммарный срок службы привода те же, что и для привода М1. 6) Параметры электродвигателя: тип, марку, мощность стоту вращения P э и ча- n первоначально принять такими же, что и в э приводе М1 (см. раздел I). 67 1 — электродвигатель, 2 — ременная передача, 3 — червячный редуктор, 4 — муфта, 5 — исполнительный механизм. Рисунок 1 (М2) - Кинематическая схема привода второй модификации. 1 РАСЧЕТ ОБЩИХ ПАРАМЕТРОВ ПРИВОДА М2 Выбор электродвигателя и определение силовых и кинематических параметров проводится с учетом КПД червячной и ременной передачи: 0,7 ÷ 0,75 — при z1 = 1 (uчер > 30), ηчер= 0,76 ÷ 0,85 — при z1 = 2 (uчер = 15 ÷ 30), 0,86 ÷ 0,92 — при z1 = 4 (uчер = 8 ÷ 15); 68 0,96 ÷ 0,98 — для плоскоременной передачи, 0,95 ÷ 0,97 — для клиноременной передачи; ηрем= а также КПД муфты м 0,98 0,99 0,99 0,995 . пк и подшипников качения Учитывая более низкий КПД червячных передач по сравнению с КПД зубчатых передач, мощность первоначально выбранного электродвигателя может оказаться недостаточной для нормальной работы исполнительного механизма. Общий КПД привода М2 об рем ред м , где КПД червячного редуктора ред 2 . черв пк Требуемая мощность на валу электродвигателя, кВт P , P* э об где P P или P ; б ц F V Pб л л , кВт 1000 Pц Fц Vц 1000 , кВт P 0,95P* мощность выбранного электродвигателя доэ э При статочна. В противном случае необходимо выбрать электродвигатель большей мощности, используя таблицу1.2 разд. I. Общее передаточное число привода М2 остается таким же, как в приводе М1, т.к. частоты вращения электродвигателя и исполнительного механизма не изменились n u э . об n III Передаточное число червячного редуктора принимаем u *чер uкон uцил 10 и уточняем по стандартизованному ряду: 10; (11,2); 12,5; (14); 16; (18); 20; (22,4); 25; (28); 31,5; (35,5); 40 В скобках указаны значения второго ряда чисел. Примечание - u кон и u цил определяются при расчете привода М1 (см. раздел I). 69 Тогда передаточное число ременной передачи будет U рем U об U чер (округлить до сотых ). Проверить условие 1,5 ≤ Uрем ≤ 3,0. В случае, если частота вращения электродвигателя изменена ( например, увеличена) по сравнению с приводом М1, тогда при разбивке общего передаточного числа Uоб по ступеням можно задаться передаточным числом червячной передачи в пределах U об U U* об 10 40 . чер [U рем ] 1,5 3,0 Затем выбрать из стандартизованного ряда чисел U чер и уточнить U рем U об U чер так, чтобы соблюдалось условие 1,5 ≤ Uрем ≤ 3,0 . В результате должны быть уточнены: 1) мощности на валах привода, кВт: P P II Э рем пк , P P , I Э 2) частоты вращения валов, об/мин: nI n n n , , II u I э рем 3) угловые скорости валов, рад/с: I э n I 30 , II P P ; III Э об n III I u рем , 4) крутящие моменты на валах, Н∙м: P 1000Pi i T T 9550 или , i i n i i где P, кВт , n,об мин, ω, рад/сек; i=I,II,III. Результаты расчетов свести в таблицу. . 70 n II uчер ; III II uчер ; 2 ВЫБОР МАТЕРИАЛОВ И ОПРЕДЕЛЕНИЕ ДОПУСКАЕМЫХ НАПРЯЖЕНИЙ Исходные данные для расчета 1) Крутящий момент на колесе T2 TIII , Н м ; 2) Частота вращения червяка n1 nII , об мин ; 3) Передаточное число u uчер ; 4) Срок службы передачи t , час . 5) Параметры графика нагрузки: k1, k2, k3, α1, α2, α3 (см.раздел I риT max 2,4 сунок 3), T . ном 2.1 Материалы червяков и червячных колёс Червяки. Наилучшее качество работы червячной передачи обеспечивают червяки, изготовленные как из цементируемых сталей (15Х, 20Х, 12ХНЗА, 18ХГТ) с твёрдостью после термообработки HRC 58...63, так и из среднеуглеродистых сталей (45, 40Х, 38ХГН, 40ХН) с поверхностной или объёмной закалкой до твёрдости HRC 50...55 с последующим шлифованием и полированием рабочих поверхностей червяка. Улучшенные, нормализованные (твердость HB ≤ 350) и чугунные червяки применяют в тихоходных и малонагруженных передачах, а также при отсутствии оборудования для их шлифовки. Червячные колёса. Материалы, применяемые для червячных колёс (таблица 1.1), можно условно разбить на три группы по убыванию их противозадирных антифрикционных свойств. Группа 1. Бронзы высокооловянистые (6...10% Sn) с присадками фосфора и никеля. Эти бронзы отличаются хорошими противозадирными свойствами. Их применяют в высокоскоростных передачах при скоростях скольжения VS до 30 м/с. Группа 2. Бронзы безоловянистые и латуни. Значительно дешевле оловянистых, но обладают худшими антифрикционными свойствами и поэтому применяются при скоростях скольжения VS до 5 м/с. Группа 3. Мягкие серые чугуны. Применяют в механических и ручных приводах при VS до 2 м/с. 71 Выбор группы материала производят, определив скорость скольжения по эмпирической формуле V * 3,7 4,6 n 10 4 3 T2 , м с . S 1 Т а б л и ц а 1.1 - Материалы для червячных колёс Механические Рекомендуемый Способ свойства, МПа Группа Марка материала отливки предел VS , м/с В Т ВИ З К БрОНФ 10-1-1 Ц З БрОЦС6-3-3 К БрОЦС5-5-5 К БрСуН7-2 К З БрАЖ-9-4 К Ц БрАЖН10-4-4 К, Ц БрАЖМц 10-3-1,5 К З ЛАЖМц66-6-3-2 К Ц ЛМцС58-2-2 К ЛМцОС58-2-2-2 К СЧ12-28 — СЧ15-32 — СЧ 18-36 — 200 250 290 180 200 220 180 400 500 500 600 500 600 650 700 340 500 — — — БрОФ-10-1 1 2 3 140 150 170 90 90 90 — 200 200 200 200 200 240 240 240 140 380 — — — — — — — — — — — — — — — — — — — — 280 320 360 25 25 30 12 12 12 25 5 5 5 5 5 5 5 5 5 5 2 2 2 2.2 Допускаемые напряжения Основными причинами выхода из строя закрытых и открытых червячных передач являются поверхностные разрушения, схватывание и износ зубьев. Схватывание особенно опасно при изготовлении венцов червячных колёс из чугуна или твёрдых безоловянистых бронз. Усталостное выкрашивание наблюдается главным образом в передачах с колёсами из стойких против заедания оловянистых бронз. Изломы наблюдаются возле очагов износа, причём ломаются только зубья мелкомодульных колёс. 72 Поэтому, основным расчётом как для закрытых, так и для открытых червячных передач является расчёт на контактную выносливость и износостойкость зубьев колеса, предотвращающий выкрашивание, износ и заедание. Расчёт на выносливость зубьев при изгибе выполняют как проверочный. Витки червяка, изготовленного из стали, значительно прочнее бронзовых или чугунных зубьев червячного колеса, в связи с чем витки червяка на прочность не рассчитывают. Допускаемые напряжения при расчёте на контактную прочность и износостойкость рабочих поверхностей зубьев червячного колеса H и на выносливость зубьев по напряжениям изгиба F определяют в зависимости от выбранной группы материала червячного колеса по таблице 2.1. Т а б л и ц а 2 . 1- Допускаемые напряжения для зубьев червячных колес Группа материала (см.таблицу1.1 ) F H 1 0,75 ...0,9 В K HL CV F 0 0,25 Т 0,08 В K FL 2 250 3 175 210 35VS F 1 0,16 В 300 25V S F 0 0,225 ВИ F 1 0,075 ВИ Примечания 1 Индекс -1 — при симметричном цикле нагружения (передача реверсивная), 0 — при отнулевом цикле нагружения. 2 Меньшие значения выбираются при твердости червяка не более HB 350, большие — при шлифовке и полировке червяка при твердости HRC ≥ 45. В таблице 2.1 CV — коэффициент, учитывающий интенсивность из- нашивания зубьев, определяется по формуле 0,352 C 1,66 V V S таблице: V , м/с S 5 6 7 ≥8 CV 0,95 0,88 0,83 0,8 73 или по K HL — коэффициент долговечности при расчёте на контактную усталостную прочность (выносливость). 10 7 8 K HL 1,15 , N HE где N HE — эквивалентное число циклов перемены напряжений: при постоянной нагрузке N HE N 60t n2 , n1 где n2 nIII или n2 U - частота вращения червячного колеса; при переменной нагрузке N HE K HE N . K FL — коэффициент долговечности при расчёте на выносливость по напряжениям изгиба: K FL 9 106 1, N FE где N FE — эквивалентное число циклов перемены напряжений: при постоянной нагрузке N N 60 t n , FE 2 при переменной нагрузке N FE K FE N . 7 7 7 При N HE 2510 и N FE 25 10 , принимается N HE 25 10 и N FE 25 107 . Следовательно, коэффициенты долговечности принимают значе 1,0 . 0,67 K 1,15 и 0,54 K ния FL HL K K HE и FE — коэффициенты приведения, с помощью которых суммарное число циклов перемены напряжений заменяют эквивалентным, соответствующим постоянной нагрузке, эквивалентной по усталостному воздействию действительной нагрузке на передачу. 74 При ступенчатом нагружении передачи коэффициенты K HE и K FE определяют по зависимостям: K HE ki i4 , где K FE ki i9 , ki — параметры графика нагрузки . i , График нагрузки тот же, что и при расчете привода М1 (см. раздел I, рисунок 3б). Для типовых режимов работы значения K H E и K FE приведены в таблица. 2.2. Т а б л и ц а 2.2 - Коэффициенты приведения K H E Режим рабо- 0 1 2 3 K HE 1,0 0,41 0,20 0,12 ты K FE 1,0 0,2 0,10 0,04 1,0 0,77 0,5 0,45 и K FE 4 0,081 0,016 0,38 5 0,034 0,004 0,31 2.2.2 Предельные допускаемые напряжения при действии максимальной нагрузки При действии на зубья червячного колеса кратковременных перегрузок T2пик требуется проверка зубьев на отсутствие пластических деформаций или хрупкого разрушения рабочих поверхностей зубьев по контактным напряжениям H max H max и напряжениям при изгибе F max F max . При этом используется таблица 2.3 и свойства выбранного материала колеса. Т а б л и ц а 2.3 - Допускаемые максимальные напряжения зубьев червячного колеса Группа материала (таблица 1.1) H max 1 4T 2 2T 3 1,5 75 F max 0,8T В 0,6 В 3 ПРОЕКТНЫЙ РАСЧЕТ ЧЕРВЯЧНОЙ ПЕРЕДАЧИ 3.1 Определение расчетных и стандартизованных параметров червячной передачи 3.1.1 Число заходов червяка и зубьев червячного колеса Число заходов червяка z1 определяется по таблице 3.1 в зависимости от передаточного числа U. Т а б л и ц а 3.1- Значение числа заходов червяка сти от передаточного числа U 8...15 15...28 U z 1 4 4; 2 z в зависимо1 28...35,5 ≥ 36 1; 2 1 Число зубьев колеса z2 z1 U . По условию не подрезания зубьев z2 28 3.1.2 Коэффициент диаметра червяка q Рекомендуют 0,212 z 2 q 0,4 z 2 * Предварительно принимают q 0,25 z 2 Полученное значение округляют до ближайшего стандартизованного по табл. 3.2. Целесообразно ориентироваться на минимальные (из указанных в таблице) значения q, так как с уменьшением q увеличивается угол подъёма витков червяка и, следовательно, КПД передачи. Однако, из условия жесткости червяка необходимо, чтобы значение q превышало минимально допустимое значение qmin 0,212 z2 . Т а б л и ц а 3.2 - Значения q в зависимости от стандартных значений т. т 2; 2,5; 3,15; 5; 6,3 8; 10; 12,5 16 20 8; 4; 510; 12,5; 8; 10; 12,5; 8; 10; 12,5; 8; 10; 12,5; 8; 10 q 16; 18 14; 16; 20 16; 20 16 76 3.1.3 Межосевое расстояние Межосевое расстояние червячной передачи определяют по формуле , мм, 2 z 5400 q K T a* 2 1 3 2, w q z H 2 где K – коэффициент нагрузки (см.п.4.1.1). Предварительно K≈1,1…1,3; T2, Н∙м, [σH], МПа При q 0,25 z2 формула упрощается K T2 a* 610 3 w H 2 Для стандартного редуктора полученное значение межосевого расстояния округляют до ближайшей величины (мм): 40, 50, 63, 80, (90), 100, (112), 125, (140), 160, (180), 200, (225), 250, (280), 315, (355), 400, (450), 500. В скобках указаны значения второго ряда чисел. 3.1.4 Модуль передачи 2 a w m* q z2 , Полученное значение модуля округляют до ближайшего стандартизованного по таблице 3.2. 3.1.5 Проверка параметров по коэффициенту смещения a x w 0,5z 2 q . m Если x 1 , то необходимо изменить q и z 2 так, чтобы соблюдалось условие x 1 . При этом проверить условие 0,212 z2 q 0,4 z2 . После выбора стандартизованных значений aw , т и q их можно согласовать со стандартизованными комплексами параметров aw , т, q, z1 , z 2 , u и х (см. приложение М2,стр.86). 77 3.1.6 Геометрические параметры червячной передачи. Червяк Делительный диаметр d1 mq . Начальный диаметр d w1 m(q 2 x) . Диаметр вершин витков d a1 d1 2m . Диаметр впадин витков d f 1 d1 2,4m . Длина нарезной части червяка b1 (таблица 3.3) Т а б л и ц а 3.3 - Длина нарезной части червяка z1 = 4 z1 = 1 и 2 Коэффициент смещения х b1 (10,5 z2 ) m b1 (10,5 z2 ) m -1 -0,5 0 +0,5 +1 b1 (8 0,06 z2 ) m b1 (9,5 0,09 z2 ) m b1 (11 0,06 z 2 ) m b1 (12,5 0,09 z2 ) m b1 (11 0,1 z2 ) m b1 (12,5 0,1 z2 ) m b1 (12 0,1 z2 ) m b1 (13 0,1 z2 ) m Примечание- Для шлифуемых и фрезеруемых червяков длину b1 увеличивают на 25 мм при модуле m 10 мм , на 35…40 мм при m=10…16 мм, на 50 мм при m 16 мм . 78 Червячное колесо Делительный (начальный) диаметр d 2 d w2 m z2 . Диаметр окружности вершин зубьев d a2 d 2 2m1 x . Диаметр окружности впадин зубьев d f 2 d 2 2m1,2 x . Наружный диаметр d aМ 2 и ширина венца колеса b2 в зависимости от числа заходов червяка определяют по таблице 3.4 — условный угол обхвата червяка зубом колеса, определяется точками пересечения дуги окружности диаметром dw1+1,5m b2 с контуром венца колеса 2 arcsin d 1,5m w1 Т а б л и ц а 3.4 - Наружный диаметр и ширина венца червячного колеса z1 1 2 4 d aМ 2 b2 d a2 2m d a2 1,5m 0,75d a1 d a2 m 0,67d a1 3.2 Скорость скольжения в зацеплении и КПД передачи 3.2.1 Скорость скольжения витков червяка относительно зубьев колеса, м/с V mn1 V w1 Vw21 Vw22 z12 q 2 x 2 , S cos 19100 w где Vw1 , Vw2 — окружные скорости соответственно на начальном диаметре червяка и червячного колеса, м/с Vw1 d w1 n1 60 1000 d w2 n2 V w2 601000 Углы подъёма витка червяка: z1 arctg - делительный угол подъёма витка ; q 79 . - начальный угол подъёма витка V z arctg 1 arctg w2 . w q2x Vw1 3.2.2 Коэффициент полезного действия Коэффициент полезного действия учитывает потери на трение в зацеплении, в опорах и на перемешивание смазки в картере tg w tg ( w ') , где 'arctg f ' - приведенный угол трения (см. таблицу 3.5), f ' - приведенный коэффициент трения, величина которого зависит от материалов червячной пары, от скорости скольжения и чистоты обработки поверхностей. При ' w передача движения в обратном направлении (от колеса к червяку) становится невозможной - самотормозящая червячная пара. Свойство самоторможения червячных передач используют в грузоподъемных и других механизмах. КПД самотормозящей передачи мал и всегда меньше 0,5. Для надежности самоторможения рекомендуют ' 2 w . 3.3 Силы в зацеплении Окружная сила на колесе, равная осевой силе на червяке ,Н, F F t2 a1 2000 T2ф d w2 , где T2ф T1 U ред - фактический крутящий момент на колесе. Окружная сила на червяке, равная осевой силе на колесе F F t1 a2 2000 T1 d w1 . Связь между окружными силами Ft 2 z1 F F tg w / t1 q 2 x t2 ред Радиальные силы на колесе и архимедовом червяке F F F F tg , r r1 r2 t2 w где W — угол зацепления. Для стандартного W 20 Fr 0,364 Ft 2 80 . Т а б л и ц а 3.5 - Значение угла трения ' между витками червяка и зубьями колеса при шлифованном или полированном червяке Скорость скольжения Угол трения ' для групп материалов V 1 2и3 S 0,01 6°10′ 7°20′ 0,1 4°30′ 5°10′ 0,25 3°40′ 4°20′ 0,5 3°10′ 3°40′ 1 2°30′ 3°10′ 1,5 2°20′ 2°50′ 2 2°00′ 2°30′ 2,5 1°40′ 2°20′ 3 1°30′ 2°00′ 4 1°20′ 1°40′ 7 1°00′ 1°30′ 10 0°55′ 1°20′ 15 0°50′ 1°10′ Примечание - Значения угла трения даны с учетом потерь на перемешивание масла и потерь в подшипниках (качения) валов. 4 ПРОВЕРОЧНЫЕ РАСЧЕТЫ В проверочных расчётах определяют фактические контактные напряжения H и напряжения изгиба F и сравнивают их с допускаемыми H и F . Для этого уточняют значение допускаемого напряжения H (см. п. 2.2.1) с учётом точного значения VS (см. п. 3.2.1) . 4.1 Расчетные коэффициенты для проверки прочности червячной передачи 4.1.1 Коэффициент нагрузки K K K K K . H F V где K — коэффициент неравномерности распределения нагрузки по ширине венца колеса. При постоянной нагрузке K 1 , 3 z2 при переменной K 1 1 81 , где — коэффициент деформации червяка, зависящий от z1 и q (см. таблицу 4.1) — коэффициент, учитывающий влияние режима работы передачи на приработку зубьев червячного колеса и витков червяка 1 T2i ti . T2 ti Значения для типовых режимов нагружения даны в таблице 2.2. При ступенчатом графике нагрузки 1 k1 2 k2 3 k3 ... Т а б л и ц а 4.1 - Коэффициент деформации червяка и делительный угол подъема линии витков червяка q z1 , 8 10 12,5 14 16 18 20 6°20′ 5°9′ 4°5′ 4°05′ 3°35′ 3°11′ 2°52′ 1 72 108 154 190 214 257 248 14°2′ 11°19′ 9°5′ 8°8′ 7°7′ 6°20′ 5°43′ 2 57 86 121 152 171 204 197 26°43′ 21°48′ 17°45′ 15°57′ 14°2′ 12°31′ 11°19′ 4 47 70 98 123 134 163 157 Коэффициент динамической нагрузки KV , зависит от скорости скольжения VS и принятой степени точности изготовления червячной пары (таблица 4.2). Т а б л и ц а 4.2 - Значение динамического коэффициента KV Степень точности 6 7 8 9 Скорость скольжения, VS , м/с 1,5 1,5…3 3…7,5 — — 1,00 1,00 1,00 1,10 1,15 1,25 1,35 1,25 — — 82 7,5…12 1,10 1,20 — — 4.1.2 Коэффициент формы зуба F Коэффициент F принимают по таблице 4.3 в зависимости от числа зубьев эквивалентного прямозубого колеса ZV z2 cos3 w Т а б л и ц а 4.3 - Зависимость коэффициента формы зуба F от числа зубьев эквивалентного колеса Z V Z V 20 24 26 28 30 32 35 37 40 45 50 60 80 100 150 300 F 1,98 1,88 1,85 1,80 1,76 1,71 1,64 1,61 1,55 1,48 1,45 1,40 1,34 1,30 1,27 1,24 4.2 Расчётные напряжения при проверочных расчетах Проверочные расчёты на контактную выносливость K T2ф 5400 q 2 x z q 2 x 3 15200 2 K T2ф H ; H d w2 z2 a q 2 x d w1 w на выносливость зубьев по изгибу F 0,74YF K Ft 2 b2 mcos w F . Результат расчёта следует признать неудовлетворительным, если H 1,05 H (передача перегружена), а также в случае H 0,85 H (передача значительно недогружена). В этих случаях следует повторить расчёт, изменив соответствующим образом межосевое расстояние или другие геометрические параметры. В большинстве случаев расчётные напряжения изгиба в зубьях колёс значительно ниже допускаемых, так как нагрузочная способность червячных передач ограничивается контактной прочностью и износостойкостью зубьев червячного колеса. В случае F F следует увеличить модуль m и выполнить повторный расчёт. 83 4.3 Проверка передачи на кратковременную перегрузку Проверка передачи на кратковременную перегрузку по контактным напряжениям и напряжениям изгиба: максимальные контактные напряжения T2 max H max . T2 максимальные напряжения изгиба T F max F 2 max F max . T2 Допускаемые максимальные напряжения H max и F max для зубьев колеса см. таблицу 2.3. 4.4 Проверка червячной передачи на теплостойкость Для удовлетворительной работы червячного редуктора необходимо обеспечить условие H max H tМ 1000 1 P1 t0 t М , KT A где t М — температура масла (корпуса) редуктора, °С; t 0 20С — температура окружающего воздуха; P1 — мощность на входном валу, кВт; КТ = 10…17 Вт м С — коэффициент теплопередачи без искусственного охлаждения (большие значения — при хороших условиях охлаждения); А — площадь поверхности охлаждения корпуса редуктора, м2; t М 95С — максимально допустимая температура масла. Площадь поверхности охлаждения корпуса редуктора определяют (рисунок 1 раздел III М2) по формуле : 2 A 2H (L B) c L B B 2 d a1 ; где H 2aw 0,4daM 2 ; L 1,3d aM 2 ; c – коэффициент теплоотвода от днища корпуса: c = 1…1,5. При этом c = 1,5, если между днищем и фундаментом есть зазор для протекания воздуха. Приближенно площадь поверхность охлаждения корпуса редуктора можно оценить по таблице 4.4. 84 Т а б л и ц а 4.4 - Зависимость поверхности охлаждения корпуса червячного редуктора от межосевого расстояния передачи a , мм 80 100 125 140 160 180 200 225 250 280 w А, м2 0,19 0,24 0,36 0,43 0,54 0,67 0,8 1,0 1,2 1,4 Если t М t М , то должен быть предусмотрен отвод избыточного тепла следующими способами: 1) корпус редуктора делают ребристым. При этом учитывают только 50% поверхности ребер. 2) устанавливают вентилятор. 1000 1 P1 t 20 t М При этом М 0,7 KТ 0,3KТВ A Коэффициент KTВ при обдуве вентилятором назначают по таблице 4.5 Т а б л и ц а 4.5 - Зависимость коэффициента теплоотвода KTВ от частоты вращения вала вентилятора n , об мин 750 1000 1500 3000 B K TВ 24 29 35 50 3) устанавливают в корпусе редуктора змеевик с проточной водой. 2 При этом принимают KT 80180 Вт м С . 4.5. Предварительная проверка червяка на жесткость Прогиб червяка L3 Ft21 Fr21 y y 0,005 0,008 m , 48 I пр E где I пр — приведенный осевой момент инерции, мм4, d 4f 1 d a1 I 0,375 0,625 пр 64 d f1 ; L 1,3 d aM 2 - расстояние между опорами червяка, мм E 2 10 5 МПа — модуль упругости стального червяка. 85 86 РАЗДЕЛ IV РАСЧЕТ РЕМЕННЫХ ПЕРЕДАЧ ПРИВОДА М2 Исходные данные для расчета 1) Кинематическая схема: составить самостоятельно в соответствии с техническим заданием (ТЗ) на проектирование с указанием угла наклона линии центров передачи к горизонту , условий и режимов ее эксплуатации. 2) Мощность P1 , частота вращения n1 , крутящий момент T1 на ведущей (малой) звездочке: P1 PI , kВт , n1 nI , об мин , T1 TI , Н м . 3) Передаточное число U U рем U общ U ред . 4) Суммарный срок службы t , час. Базовый срок службы передачи принять как при среднем режиме работы ТБ = 2000 часов. β 87 1 ВЫБОР ВИДА РЕМЕННОЙ ПЕРЕДАЧИ И ОПРЕДЕЛЕНИЕ ЕЕ ПАРАМЕТРОВ В понижающих частоту вращения приводах машин ременную передачу устанавливают между валом электродвигателя и быстроходным валом редуктора (в рассматриваемом примере — червячного). В зависимости от формы поперечного сечения ремня различают: передачи с плоскими ремнями из различных материалов (кордошнуровые, прорезиненные и синтетические), клиновые (нормального и узкого сечения), поликлиновые (клинья на общем узком основании вдоль ленты, прорезиненные) и зубчатоременные (зубья на плоском основании поперек ленты — синтетические). Последние относятся больше к передачам зацепления, поэтому в качестве примера в учебной проектировочной работе их рассматривать не будем (см. справочную литературу). Расчет поликлиновых ремней, обладающих более высокой тяговой способностью по сравнению с плоскими и клиновыми ремнями, приведен в [1], [2], [3]. Плоские ремни имеют обычно меньшую тяговую способность и большие размеры. Поэтому их рассмотрим в методике расчета только частично для сравнения с наиболее распространенными в приводах машин клиновыми ремнями нормального сечения. Величина коэффициента скольжения при нормальных рабочих нагрузках в клиноременной передаче зависит от материала ремня (кордшнуровой ремень - 0,01 , кордтканевый - 0,02 , прорезиненный - 0,01 , синтетический - 0,015 ). Примем среднее значение 0,015 . 1.1 Геометрические и кинематические параметры ременной передачи Предварительно, диаметр ведущего (меньшего) шкива определим по формулам, мм ( Т1 , Н . м ): d1* 30 40 3 Т1 , 88 Диаметр малого шкива надо уточнить по стандартизованному ряду чисел, мм: 50; 63(71); 80; 90; 100; 112; 125; 140; 160; 180; 200; 224; 250; 280; 320; 360; 4004 450; 500; 560; 630; 710; 800; 900; 1000; 1120; 1400; 1800; 2000. Клиновой ремень имеет приведенный коэффициент трения о шкив, приблизительно, в три раза больше, чем коэффициент трения прорезиненного плоского ремня. Поэтому есть возможность уменьшить диаметр шкива по сравнению с результатом расчета по формуле, выбрав вначале стандартизованное сечение клинового ремня по таблице 1.1, а затем - минимальный диаметр малого шкива d1min , расчетную длину ремня Lmin и наибольшее число ремней zmax из таблиp це 1.2 . При этом, если возможны два варианта сечения ремня, то расчеты ведут параллельно для обоих вариантов, выбрав затем из них оптимальный. Т а б л и ц а 1.1- Выбор нормального сечения клинового ремня по частоте вращения малого шкива n1 и мощности P1 P1 , кВт n1 , об/мин <2 2 3,15 5 8 12,5 20 31,5 < 750 0 А Б Б Б В В Г < 1000 0 А А Б Б В В В < 1500 0 А А Б Б Б В В < 3000 0 А А А Б Б Б В Примечания 1 По международным стандартам (ISO) сечение ремней обозначаются 0 Z, А А, Б В, ВС, Г D, Д Е. 2 При промежуточных значениях мощности, близких к средним, выбирают два возможных сечения. 89 Т а б л и ц а 1.2 - Предельные значения диаметра малого шкива d1min , расчетной длины ремня Lmin и количества ремней zmax p Сечение ремня d1min , мм 0 63 А 90 Б 125 В 200 Г 315 Lmin p , мм 400 500 800 1800 3000 zmax 4 6 7 8 8 Диаметр ведомого (большего) шкива предварительно d2* d1 U 1 , мм , Округляем до ближайшего диаметра го ряда чисел (см. выше). Фактическое передаточное число Uф d2, мм, из стандартизованно- d2 d1 1 . Расхождение между заданным и фактическим передаточными числами не должно превышать 4%. Окружная скорость ведущей ветви ремня, м/с, V1 d1 n1 60 1000 , где d1 , мм ; n1 , об мин . Межосевое расстояние Расчетное значение межосевого расстояния: для плоскоременной передачи a 2 d1 d 2 , в крайнем случае a amin 1,5 d1 d 2 ; для клиноременной передачи при 120 o и U 7 0,55 d1 d 2 h a 1,5 d1 d 2 , min min т. е. anл 3akл . где h — высота трапецеидального сечения ремня (таблица 1.10). При выборе межосевого расстояния учесть рекомендации таблицы 1.3, приняв d p 2 d2 . 90 Т а б л и ц а 1.3 - Выбор межосевого расстояния в зависимости от передаточного числа u 1 2 3 4 5 6 a, мм 1,5d p 2 1,2d p 2 d p2 0,95d p 2 0,9d p 2 0,8d p 2 Примечания 1. d p 2 — расчетный диаметр клинового ремня по нейтральному слою сечения. 2. Для плоскоременных передач можно определить межосевое расстояние, увеличив табличное а в 1,5 — 2 раза. Длина ремня При выбранном межосевом расстоянии расчетная длина ремня предварительно определяется из выражения: d1 d 2 d 2 d1 2 * L 2a . p 2 4a Для плоскоременной передачи уточняют LР по стандартизованному ряду чисел, мм: 500; 550; 600; 650; 700; 750; 800; 850; 900; 950; 1000; 1050; 1100; 1150; 1200; 1250; 1300; 1400; 1500; 1600; 1700; 1800; 2000; 2500; 3000; 3500; 4000. Для клиноременной передачи расчетную длину ремня L p уточняют по первому (предпочтительному) стандартизованному ряду чисел, мм, так, чтобы L p Lmin p (таблица 1.2) : 400; 450; 500; 560; 630; 710; 800; 900; 1000; 1120; 1250; 1400; 1600; 1800; 2000; 2240; 2500; 2800; 3150; 3550; 4000; 4500; 5000; 5600; 6300; 7100; 8000; 9000; 10000; 11200 (второй ряд чисел приведен в таблице 1.10 — в скобках). Окончательно межосевое расстояние 2 2 L d d 2L d d 8 d d 2 p 1 2 1 2 2 1 p a . 8 91 В дальнейшем найденные параметры ременных передач могут быть откорректированы по результатам проверочных расчетов. 1.3 Расчет ремней по тяговой способности передачи Ограниченное число типоразмеров стандартных клиновых ремней позволило определить допускаемую нагрузку для каждого типоразмера ремня, а расчет передачи свести к подбору типа и числа ремней по методике, изложенной ниже. Параметры, выбранного ранее (п.1.1) типа трапецеидального сечения ремня, приведены в таблице 1.10. Требуемое количество клиновых ремней в передаче P 1 z z max , [P ] C p z где [ Pp ] — допускаемая расчетная мощность, которая может быть передана одним ремнем, кВт C C C C P P V U L , p 0 C кл p где P0 — допускаемая приведенная мощность, передаваемая одним клиновым ремнем, кВт, (таблица 1.11) типовой передачи с длиной ремня L0 (таблица 1.11), углом наклона линии центров 0 , 1 180 , U 1 , V1 10 м с при спокойной (равномерной) нагрузке. Коэффициент числа ремней C z и другие коэффициенты выбираем из таблиц 1.4 ÷ 1.9. После подстановки [ Pp ] и Cz 1,0 0,85 находим z , округлив результат до целого числа. Общая площадь поперечного сечения клинового ремня Aкл A0 z , где A0 — площадь трапецеидального сечения ремня (таблица 1.10); z — количество клиновых ремней в передаче. Для сравнения ниже приведен расчет плоскоременной передачи. Площадь поперечного сечения плоского ремня, мм: A b , где — толщина, b — ширина ремня. Толщина плоского ремня определяется с учетом условия 92 * d1 d1min , d1min где допускаемое отношение 30 — для прорезиненных рем ней. Толщина ремня уточняется по табличным значениям чисел, мм: 2,8; 3,75; 4,5; 5; 6,25; 7,5; 9, приняв таб * . Ширина ремня, мм, Ft , b K п где K п — допускаемая приведенная удельная окружная сила: K п K0 C C Cd CV Cu CL C p , где K 0 — допускаемая удельная окружная нагрузка для типовой плоскоременной передачи; для прорезиненных ремней K0 1,6 2,3 Н мм при напряжениях от предварительного натяже- ния ремня 0 2МПа (большие значения K 0 при 1 1min ). Частные корректирующие коэффициенты определить по таблицам 1.4 ÷ 1.9. При этом коэффициент режима работы плоскоременной передачи (таблица 1.9): 1 C C пл 1. p p кл Cp Окончательно с учетом Cu 1 (таблица 1.7) и CL 1 (таблица 1.8) получается: K п K0 C C Cd CV 1кл . Cp Используя рекомендации таблиц 1.4 ÷ 1.9, получим искомую ширину плоского ремня , мм, b* n Ft K 93 n , P1 V1 K которую уточним по стандартизованному ряду, приняв bст b* , мм: 20; 25(30); 35; 40; 50(60); 63(70); 71(75); 80(85); 90; 100 и т. д. до 250. Окончательно, площадь поперечного сечения плоского ремня: Aпл таб bсм . Т а б л и ц а 1.4 - Корректирующие коэффициенты отличия реальных ременных передач от типовых Коэффициент C — учет угла обхвата Передача Плоскоременная Таблица 1.5 Клиноременная Таблица 1.5 1,0 1,0 0,9 1,0 C — учет угла наклона и способа натяжения ремня* 0...60 60...80 80...90 0,8 1,0 Примечание - Для передач с автоматическим натяжением (самонатяжные) C 1 при всех углах наклона линии центров шкивов к горизонту. * C d — учет диаметра малого шкива d1 60 мм d1 80 мм d1 120 мм CV — учет скорости Cu — учет передаточного числа C L — учет длины ремня C p — коэффициент режима и нагрузки C z — учет ожидаемого количества ремней z z 1 z 2;.3 z 4;.5 z6 94 1,0 1,0 1,1 1,0 1,2 1,0 Таблица 1. 6 Таблица 1.6 1,0 табл. 1.7 1,0 табл. 1.8 Таблица 1.9 Таблица 1.9 — — 1 0,95 — — 0,90 0,85 Т а б л и ц а 1.5 - Коэффициент угла обхвата C Угол обхвата 1 , Передача 18 80 100 110 120 130 140 150 160 170 0 Плоскоремен0,7 0,7 0,8 0,8 0,8 0,9 0,9 0,9 — 1,0 ная 2 7 2 5 8 1 4 7 0,6 0,7 0,7 0,8 0,8 0,8 0,9 0,9 0,9 Клиноременная 1,0 2 3 8 3 6 9 2 5 8 Т а б л и ц а 1.6 - Коэффициент скорости Скорость ремня V V1 , м Передача 5 10 15 Плоскоременная 1,03 1,00 0,95 Клиноременная 1,04 1,00 0,95 CV с 20 0,88 0,85 25 0,79 0,74 30 0,68 0,60 Примечание - Для передач с автоматическим натяжением (самонатяжных) CV 1 при всех V . Т а б л и ц а 1.7 - Коэффициент передаточного числа CU U 1 1,2 1,4 1,6 1,8 2 2,2 2,5 2,8 CU 1 1,07 1,09 1,1 1,12 1,12 1,13 1,135 1,14 Примечание - Для плоскоременной передачи CU 1 . Т а б л и ц а 1.8 - Коэффициент длины ремня C L Сечение ремня Длина ремня, мм 0 (Z) А(A) Б(B) В(C) 1 2 3 4 5 400 0,79 — — — 450 0,80 — — — 500 0,81 — — — 560 0,82 0,79 — — 600 0,83 0,80 — — 670 0,85 0,82 — — 750 0,88 0,84 — — 850 0,91 0,86 — — 900 0,92 0,87 0,82 — 95 Г(D) 6 — — — — — — — — — ≥3 1,15 1000 1250 1500 1 1800 2000 2360 2500 3000 4000 4500 5000 6000 8000 9000 10000 0,94 0,98 1,03 2 1,06 1,08 1,20 1,30 — — — — — — — — 0,89 0,93 0,98 3 1,01 1,03 1,07 1,09 1,13 1,17 — — — — — — 0,84 0,88 0,92 4 0,95 0,98 1,01 1,03 1,07 1,13 1,15 1,18 1,22 — — — — — — 5 0,86 0,88 0,92 0,93 0,97 1,02 1,04 1,07 1,11 1,18 1,21 1,23 — — — 6 — — — — 0,86 0,91 0,93 0,96 1,00 1,06 1,09 1,11 Примечание - Для плоскоременной передачи CL 1 . Т а б л и ц а 1.9 - Коэффициент нагрузки К1 и режима работы C кл p Характер нагрузки Машины и оборудование C pкл K1 Спокойная, равномерная или Центробежные насосы и компрес1,00 2,50 близкая к ней нагрузка соры, ленточные конвейеры Поршневые насосы и многоцилинУмеренные колебания дровые компрессоры, цепные 1,10 1,00 транспортеры, смесители Реверсивные приводы, поршневые Значительные колебания насосы и компрессоры, якорные ме- 1,25 0,50 шалки, трансмиссии, смесители Ударная и резко неравномер- Молоты, мельницы, барабанные 1,55 0,25 ная нагрузка грохоты, молотковые дробилки Примечания 1 При частых и резких пусках двигателя с большими пусковыми моментами C pкл повышать на 0,15. C pкл 2 При двухсменной работе повышать на 0,15, при трехсменной — на 0,35. 3 Рекомендации по выбору количества смен работы приведены в Разделе II. 96 Т а б л и ц а 1.10 - Размеры клиновых ремней и их допускаемые полезные напряжение Сечение L0 0 (Z) (1320) А(A) (1700) Б(B) (2240) В(C) (3750) Г(D) (6000) t 0 Размеры сечения Расчетная длина ремня по 0 1,18 , 0 1,47 , нейтральному слою L p , мм МПа МПа 63 71 80 1,32 1,42 1,54 — 1,59 1,71 ≥ 90 1,62 1,82 90 1,32 100 1,48 112 1,58 — 1,64 1,76 ≥125 1,67 1,87 125 1,32 140 1,48 138 160 1,64 — 1,64 1,84 ≥180 1,71 2,01 b0 , h , bp , A0 , мм 2 мм мм мм мм 10 6 13 8 8,5 47 11 17 10,5 14 22 13,5 19 32 19 27 t 0 , МПа D1 , 81 200 225 230 250 ≥280 315 475 1,48 1,66 1,80 1,87 1,48 1,64 1,85 2,03 2,20 1,64 355 1,69 1,89 400 1,87 ≥450 1,88 2,12 2,20 400(425); 450(475); 500(530); 560(600); 630(670); 710(750); 800(850); 900(950); 1000 и более до 2500 560(600); 630(670); 710(750); 800(850); 900(950); 1000(1060); 1120(1180); 1250(1320); 1400(1500) и более до 4000 800(850); 900(950); 1000(1060); 1120(1180); 1250(1320); 1400(1500); 1600(1700); 1800(1900); 2000 и более до 6300 1800(1900); 2000(2120); 2240(2360); 2500(2620); 2800(3000); 3150(3350); 3550 и более до 10000 3150(3350); 3550(3750); 4000(4250); 4500(4750); 5000(5300); 5600(6000); 6300(6700); 7100(7500); 8000(8500); 9000(9500); 10000(10600);11200 Примечания 1 L0 — длина эталонного (типового) ремня, мм. 2 Параметры трапецеидального сечения ремней: трапеции, h — высота, b0 — ширина большего основания bp — ширина ремня по нейтральному слою. 3 При числе пробегов ремня V1 5с 1 и сравнительно больших диаметрах Lp d1 d1min (таблица 1.2) принимать напряжения от предварительного натяжения ремня 0 1,47 МПа, в остальных случаях 0 1,18 МПа. 97 Т а б л и ц а 1.11 - Мощность P0 , передаваемая одним ремнем Расчетный Мощность P , кВт, при скорости, м/с 0 Сечение диаметр L0 , мм меньшего шкива,мм 63 71 80 0(Z) (1320) 90 100 112 90 100 112 А(A) 125 (1700) 140 160 180 125 140 160 Б(B) 180 (2240) 200 224 250 180 200 224 250 В(C) 280 (3750) 315 355 400 450 355 400 450 500 Г(D) (6000) 560 630 710 800 3 5 10 15 20 25 30 0,33 0,37 0,40 0,44 0,46 0,48 0,56 0,62 0,70 0,74 0,80 0,85 0,88 0,92 1,07 1,20 1,30 1,40 1,47 1,54 1,57 1,85 2,08 2,28 2,46 2,63 2,76 2,89 3,00 4,46 4,94 5,36 5,70 5,90 6,30 6,56 6,82 0,49 0,56 0,62 0,67 0,70 0,78 0,84 0,95 1,05 1,15 1,23 1,32 1,38 1,39 1,61 1,83 2,01 2,15 2,26 2,39 2,50 2,77 3,15 3,48 3,78 4,07 4,32 4,54 4,70 6,74 7,54 8,24 8,80 9,24 9,75 10,3 10,7 0,82 0,95 1,07 1,16 1,24 1,32 1,39 1,60 1,82 2,00 2,18 2,35 2,47 2,26 2,70 3,15 3,51 3,79 4,05 4,29 4,30 4,59 5,35 6,02 6,63 7,19 7,70 8,10 8,50 11,4 13,0 14,4 15,5 16,6 17,9 18,6 19,4 1,03 1,22 1,41 1,56 1,67 1,80 1,75 2,07 2,39 2,66 2,91 3,20 3,39 2,80 3,45 4,13 4,66 5,08 5,45 5,85 6,15 5,80 6,95 7,94 8,86 9,71 10,5 11,1 11,7 14,8 17,2 19,3 21,0 22,5 24,1 25,5 26,8 1,11 1,37 1,60 1,73 1,97 2,12 1,88 2,31 2,74 3,10 3,44 3,80 4,05 — 3,83 4,73 5,44 6,00 6,50 7,00 7,40 6,33 7,86 9,18 10,4 11,5 12,6 13,3 14,2 16,8 20,0 22,8 25,0 27,0 29,2 31,0 32,6 — 1,40 1,65 1,90 2,10 2,30 — 2,29 2,82 3,27 3,70 4,12 4,47 — — 4,88 5,76 6,43 7,05 7,70 8,20 — 7,95 9,60 11,1 12,5 13,8 15,0 15,9 17,1 21,1 24,6 27,5 29,8 32,5 34,9 37,0 — — — 1,85 2,04 2,38 — — 2,50 3,14 3,64 4,16 4,56 — — 4,47 5,53 6,38 7,15 7,90 8,50 — 7,06 9,05 10,9 12,5 14,1 15,4 16,6 15,4 20,2 24,5 27,0 31,0 33,9 36,6 39,9 98 2 ПРОВЕРОЧНЫЙ РАСЧЕТ РЕМЕННЫХ ПЕРЕДАЧ 2.1 Проверка по углу обхвата Угол обхвата малого шкива d 2 d1 1 , a где допускаемая величина 1 при u 7 : 1 150 — для плоскоременных передач, 1 120 — для клиноременных передач. 1 180 57 2.2. Проверка долговечности ремня по частоте пробегов V 1 пл 5с 1 . Для плоскоременной передачи L V 1 10 15с 1 кл Для клиноременной передачи . L p 2.3 Проверка прочности ремня Прочностной проверочный расчет ведется по опасному сечению ведущей ветви ремня при набегании на малый шкив, в котором действуют максимальные напряжения, МПа, [ ] , max 1 V u p где 1 — напряжения растяжения: 1 F0 Ft A A0 2 A2 A0 z , где F0 — сила предварительного натяжения ремня; A и A0 — площадь сечения ремня соответственно плоского и клинового. z – число клиновых ремней (см. п. 1.3) Для плоскоременной передачи F0 A 0 , где 0 2 МПа — допускаемое предварительное напряжение для плоского прорезиненного ремня. 99 Для клинового ремня F0 A0 0 можно приближенно найти по данным A0 и 0 из таблиц 1.10 или определить F0 расчетом (предпочтительнее): F 0 где F t 1000 P1 V1 0,85Ft CL C кл p zC F ,Н , V 2000 T1 — окружная сила, Н, при P1, кВт d1 и V1, м/с; C , C , C кл — коэффициенты (таблицы 1.5, 1.8, 1.9); L p FV V A0 — центробежная сила, Н (обычно учитывается только в скоростных передачах при V>10м/с) V — напряжения от центробежных сил: V V 2 10 6 , МПа , где 1000 ...1200 кг м3 — плотность материала плоского ремня; 1250 ...1400 кг м3 — плотность материала клинового ремня. — напряжения изгиба и E , МПа , и E, МПа — модуль упругости материала ремня (Е=80…100МПа для прорезиненных ремней); — относительная линейная деформация (удлинение): для плоскоременной передачи d , 1 для клиноременной передачи h d , 1 где и h — толщина плоского и клинового ремня соответственно. [ p ] — допускаемые напряжения растяжения: для плоского ремня [ p ] 8МПа , для клинового ремня [ p ] 10 МПа . 100 Коэффициент тяги передачи, характеризующий степень ее загруженности, определяется по формуле Ft 2 zF0 2.4. Проверка ресурса наработки передачи В соответствии со стандартами ресурс наработки ремней при среднем режиме нагрузки (умеренные колебания) Tср 2000 час . При других условиях T T K K , ср 1 2 где K1 — коэффициент режима нагрузки (таблица 1.9); K 2 — коэффициент климатических условий: K 2 1 — центральные зоны, K 2 0,75 — зоны с холодным климатом. Количество используемых за заданный срок службы передачи t комплектов ремней (округлить до большего целого числа) t C . T 3. СИЛЫ НАТЯЖЕНИЯ ВЕТВЕЙ РЕМНЯ И НАГРУЗКА НА ВАЛЫ Натяжение ведущей ветви одного ремня F F1 F0 t . 2z Натяжение ведомой ветви одного ремня F F2 F0 t . 2z Нагрузка на валы со стороны ременной передачи в уточненном расчете определяется по формуле F z F12 F22 2 F1 F2 cos2 , В 10 0 где 90 2 , (α1 -угол обхвата малого шкива) 101 Угол между вектором FB и линией центров передачи F F sin Ft arctg tg . arctg 1 2 arctg tg 2 z F 0 F1 F2 cos где φ - коэффициент тяги передачи (п.2.3). Угол наклона вектора F В к горизонту , где — угол наклона цепи (см. исходные данные для расчета). Горизонтальная и вертикальная составляющие нагрузки на валы привода F F cos Bx В F F sin By В . В приближенных расчетах сила, действующая на валы ременной передачи, может быть оценена по формуле FB z2F0 sin 1 . 2 y ψ FВ F1 γ n1 α1 θ β ψ x F2 102 ЛИТЕРАТУРА 1 Анурьев В. И. Справочник конструктора-машиностроителя. В 3 т . М.: Машиностроение, 2001. 2 Гвоздев Ю.А., Семеновых А.В., Сказыткин А.Ф. Курсовое проектирование деталей машин. Учебное пособие по курсу «Прикладная механика». – М.: ГАНГ им. И.М. Губкина, 1997. – 196с. 3 Дунаев П.Ф., Леликов О.П. Детали машин. Курсовое проектирование. — М.: Машиностроение, 2004. – 560с. 4 Елецких А.Е. Расчет цилиндрических и конических зубчатых передач. — М.: МИНХ и ГП им. И.М. Губкина, 1985. – 78с. 5 Котова В.Н., Молчанов А.Г., Певнев В.Г. Цепные передачи в приводах нефтегазового оборудования. – М.: РГУ нефти и газа им. И.М. Губкина, 2006. – 36с. 6 Котова В.Н., Молчанов А.Г., Певнев В.Г.Фрикционные передачи в приводах нефтегазового оборудования. – М.: РГУ нефти и газа им. И.М. Губкина, 2006. – 56с. 7 М.Н. Иванов, В.А. Финогенов. Детали машин.— 12-е изд. испр. — М.: Высшая школа, 2008. — 408 с. 8 Методические указания к курсовому проектированию по курсу «Детали машин» / Под ред. А.Г. Кана. – М: МИНГ им. И.М. Губкина. Часть I, 1986. – 56с., Часть II, 1987. – 46с., Часть III, 1988. – 62с., Часть IV, 1988. – 68с. 9 Обищенко Л.Н. Расчет механических передач привода нефтепромыслового оборудования. – М.: РГУ нефти и газа им. И.М. Губкина, 2004. – 60с. 103 10 Расчет на прочность деталей машин: Справочник / И. А. Биргер, Б.Ф. Шорр, Г. Б. Иосилевич. — М.: Машиностроение, 1993. — 640 с. 11 Романов М.Я., Константинов В.А. Покровский Н.А. Сборник задач по деталям машин. — М.: Машиностроение, 1984. – 238с. 12 Сборник задач по курсу «Детали машин». Изд. 2. // Под ред. В.Ф. Замковца. – М.:ГАНГ им. И.М.Губкина,1992.-76с. 13 Семеновых А.В., Сказыткин А.Ф., Гвоздев Ю.А. Справочник по материалам к расчету деталей машин. – М.: МИНГ им. И.М. Губкина, 1990. – 90с. 14 Сказыткин А.Ф. Расчет червячных передач. — М.: РГУ нефти и газа им. И.М. Губкина, 2001. – 32с. 15 Чернавский С.А. и др. Курсовое проектирование деталей машин. — М.: Машиностроение, 1988. – 416с. 16 Чернавский С.А. Проектирование механических передач. — М.: Машиностроение, 1984. – 558с. 17 Шейнблит А.Е. Курсовое проектирование деталей машин. — Калининград: Янтарный сказ, 1999. – 456с. 104 СОДЕРЖАНИЕ ВВЕДЕНИЕ ............................................................................................. 3 РАЗДЕЛ I РАСЧЕТ ЗУБЧАТЫХ ПЕРЕДАЧ РЕДУКТОРА ПРИВОДА ПЕРВОЙ МОДИФИКАЦИИ (М1) ............................... 5 1 РАСЧЕТ ОБЩИХ ПАРАМЕТРОВ ПРИВОДА М1 ................... 8 2 ВЫБОР МАТЕРИАЛОВ, ДОПУСКАЕМЫХ НАПРЯЖЕНИЙ И РАСЧЁТНЫХ КОЭФФИЦИЕНТОВ ............................................. 19 3 РАСЧЕТ ЦИЛИНДРИЧЕСКИХ ЗУБЧАТЫХ ПЕРЕДАЧ ....... 30 4 РАСЧЕТ КОНИЧЕСКОЙ ПЕРЕДАЧИ ..................................... 44 РАЗДЕЛ II РАСЧЕТ ЦЕПНОЙ ПЕРЕДАЧИ ПРИВОДА ПЕРВОЙ МОДИФИКАЦИИ (М1) ..................................................................... 53 1 ВЫБОР ВИДА ЦЕПНОЙ ПЕРЕДАЧИ И ОПРЕДЕЛЕНИЕ ЕЕ ПАРАМЕТРОВ ................................................................................. 54 2 ПРОВЕРОЧНЫЙ РАСЧЕТ ЦЕПНОЙ ПЕРЕДАЧИ ............... 63 3 НАГРУЗКИ В ВЕТВЯХ ЦЕПИ И НА ВАЛЫ ЗВЕЗДОЧЕК .. 65 РАЗДЕЛ III РАСЧЕТ ЧЕРВЯЧНОЙ ПЕРЕДАЧИ ПРИВОДА ВТОРОЙ МОДИФИКАЦИИ (М2) ................................................... 67 1 РАСЧЕТ ОБЩИХ ПАРАМЕТРОВ ПРИВОДА М2 ................. 68 2 ВЫБОР МАТЕРИАЛОВ И ОПРЕДЕЛЕНИЕ ДОПУСКАЕМЫХ НАПРЯЖЕНИЙ................................................................................ 71 3 ПРОЕКТНЫЙ РАСЧЕТ ЧЕРВЯЧНОЙ ПЕРЕДАЧИ ............... 76 4 ПРОВЕРОЧНЫЙ РАСЧЕТ ......................................................... 81 РАЗДЕЛ IV РАСЧЕТ РЕМЕННЫХ ПЕРЕДАЧ ПРИВОДА М2 87 1 ВЫБОР ВИДА РЕМЕННОЙ ПЕРЕДАЧИ И ОПРЕДЕЛЕНИЕ ЕЕ ПАРАМЕТРОВ ........................................................................... 88 2 ПРОВЕРОЧНЫЙ РАСЧЕТ РЕМЕННЫХ ПЕРЕДАЧ .............. 99 3. СИЛЫ НАТЯЖЕНИЯ ВЕТВЕЙ РЕМНЯ И НАГРУЗКА НА ВАЛЫ ............................................................................................... 101 ЛИТЕРАТУРА ................................................................................... 103 105 УЧЕБНО-МЕТОДИЧЕСКОЕ ПОСОБИЕ МАКУШКИН СЕРГЕЙ АНАТОЛЬЕВИЧ, ПЕВНЕВ ВИКТОР ГРИГОРЬЕВИЧ РАСЧЕТЫ МЕХАНИЧЕСКИХ ПЕРЕДАЧ ПРИВОДОВ НЕФТЕГАЗОВОГО ОБОРУДОВАНИЯ ЧАСТЬ I. МЕТОДИКИ РАСЧЕТА _________________________________________________________ Подписано в печать __________. Формат 60x90/16. Усл. п.л. Гарнитура «Таймс». Печать офсетная. Тираж 100 экз. Заказ № ________________________________________________________ Издательский центр РГУ нефти и газа имени И.М. Губкина 119991, Москва, Ленинский проспект, 65 Тел./факс: __________ 106