KUKA System Software
KUKA Roboter GmbH
KUKA System Software 8.3
Инструкция по эксплуатации и программированию для конечного пользователя
KUKA System
Software 8.3
Состояние на: 20.01.2015
Версия: KSS 8.3 END V4
KUKA System Software 8.3
© Авторское право 2015
KUKA Roboter GmbH
Zugspitzstraße 140
D-86165 Augsburg
Германия
Копирование данной документации, полностью или частично, равно как и предоставление ее
третьим лицам разрешается только с однозначного разрешения компании KUKA Roboter
GmbH.
В системе управления могут работать другие, не описанные в данной документации функции.
Несмотря на это, при новой поставке или при сервисном обслуживании право на данные функции отсутствует.
Мы проверили содержание печатного документа на соответствие описанному аппаратному и
программному обеспечению. Однако, так как отклонения исключить невозможно, полное соответствие нами не гарантируется. Содержащиеся в данном печатном документе сведения регулярно проверяются, и необходимые исправления включаются в следующее издание.
Возможны технические изменения, не оказывающие влияния на работу.
Перевод оригинальной документации
KIM-PS5-DOC
2 / 277
Публикация:
Pub KSS 8.3 END (PDF) ru
Структура книги:
KSS 8.3 END V4.1
Версия:
KSS 8.3 END V4
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
Содержание
Содержание
1
Введение .....................................................................................................
11
1.1
Целевая группа ........................................................................................................
11
1.2
Документация к промышленному роботу ...............................................................
11
1.3
Изображение указаний ............................................................................................
11
1.4
Товарные марки .......................................................................................................
12
2
Описание продукта ....................................................................................
13
2.1
Обзор промышленного робота ...............................................................................
13
2.2
Обзор системного программного обеспечения KUKA (KSS) ................................
13
2.3
Системные требования ...........................................................................................
14
2.4
Использование системного программного обеспечения KUKA по назначению .
14
2.5
Накопители USB KUKA ............................................................................................
14
3
Безопасность ..............................................................................................
17
3.1
Общая информация .................................................................................................
17
3.1.1
Указание об ответственности ............................................................................
17
3.1.2
Использование промышленного робота по назначению .................................
17
3.1.3
Декларация о соответствии требованиям ЕС и декларация изготовителя ...
18
3.1.4
Используемые термины .....................................................................................
19
3.2
Персонал ..................................................................................................................
21
3.3
Рабочая, безопасная и опасная зоны ....................................................................
22
Определение остановочных путей ....................................................................
22
3.4
Инициатор реакций останова ..................................................................................
23
3.5
Предохранительные устройства .............................................................................
24
3.5.1
Обзор предохранительных устройств ...............................................................
24
3.5.2
Система управления безопасностью ................................................................
25
3.5.3
Выбор режима работы ........................................................................................
25
3.5.4
Сигнал «Защита оператора» .............................................................................
26
3.3.1
3.5.5
Устройство АВАРИЙНОГО ОСТАНОВА ............................................................
26
3.5.6
Выход из вышестоящей системы управления безопасностью .......................
27
3.5.7
Внешнее устройство АВАРИЙНОГО ОСТАНОВА ............................................
27
3.5.8
Устройство подтверждения ................................................................................
28
3.5.9
Внешнее устройство подтверждения ................................................................
28
3.5.10
Внешний безопасный рабочий останов ............................................................
28
3.5.11
Внешний безопасный останов 1 и внешний безопасный останов 2 ...............
29
3.5.12
Контроль скорости в T1 ......................................................................................
29
Дополнительное защитное оснащение ..................................................................
29
3.6.1
3.6
Пошаговый режим ...............................................................................................
29
3.6.2
Программируемые концевые выключатели .....................................................
29
3.6.3
Механические концевые упоры .........................................................................
30
3.6.4
Механическое устройство ограничения зоны оси (опция) ...............................
30
3.6.5
Устройство контроля зоны оси (опция) .............................................................
30
3.6.6
Возможности перемещения манипулятора без приводной энергии ..............
30
3.6.7
Маркировки на промышленном роботе .............................................................
31
Внешние защитные приспособления ................................................................
31
3.7
3.6.8
Обзор режимов работы и защитных функций .......................................................
32
3.8
Меры безопасности .................................................................................................
33
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
3 / 277
KUKA System Software 8.3
3.8.1
Общие меры безопасности ................................................................................
33
3.8.2
Транспортировка ................................................................................................
34
3.8.3
Первый и повторный ввод в эксплуатацию ......................................................
34
Проверка технических данных и конфигурации системы безопасности ..
Режим ввода в эксплуатацию .......................................................................
36
37
3.8.4
Ручной режим ......................................................................................................
38
3.8.5
Моделирование ..................................................................................................
39
3.8.6
Автоматический режим работы .........................................................................
40
3.8.7
Техобслуживание и ремонт ...............................................................................
40
3.8.8
Вывод из эксплуатации, хранение и утилизация .............................................
42
3.8.3.1
3.8.3.2
3.8.9
Меры безопасности для Single Point of Control ................................................
42
3.9
Применяемые стандарты и предписания ..............................................................
43
4
Управление .................................................................................................
45
4.1
Переносное программирующее устройство KUKA smartPAD ..............................
45
4.1.1
Передняя сторона ..............................................................................................
45
4.1.2
Обратная сторона ...............................................................................................
47
4.1.3
Подключение и отключение пульта smartPAD .................................................
48
Пользовательский интерфейс KUKA smartHMI .....................................................
49
4.2.1
4.2
Клавиатура ..........................................................................................................
51
4.2.2
Линейка состояний .............................................................................................
51
4.2.3
Индикация состояния Интерпретатор заданий .............................................
53
Индикатор состояния Приводы и окно Условия перемещения ..................
53
4.3
4.2.4
Включение системы управления роботом и запуск KSS ......................................
55
4.4
Вызов главного меню ..............................................................................................
55
4.5
Завершение работы и повторный запуск KSS ......................................................
56
4.5.1
Выключение после сбоя подачи напряжения ..................................................
59
4.6
Включение/выключение приводов .........................................................................
60
4.7
Выключение системы управления роботом ..........................................................
60
4.8
Установка языка панели управления .....................................................................
60
4.9
Онлайновая документация и онлайн-справка .......................................................
61
4.9.1
Вызов онлайновой документации .....................................................................
61
4.9.2
Вызов онлайн-справки .......................................................................................
62
4.10 Смена группы пользователей .................................................................................
65
4.11 Смена режима работы ............................................................................................
66
4.12 Системы координат .................................................................................................
67
4.13 Перемещение робота вручную ...............................................................................
69
4.13.1
Окно Опции ручного метода ...........................................................................
70
Вкладка Общая информация .....................................................................
Вкладка Кнопки .............................................................................................
Вкладка Мышь ..............................................................................................
Вкладка Поз. KCP .........................................................................................
Вкладка Тек. база/инстр. .............................................................................
70
71
72
73
73
4.13.2
Активация вида перемещения ...........................................................................
74
4.13.3
Настройка ручной коррекции (HOV) ..................................................................
74
4.13.4
Выбор инструмента и базы ................................................................................
75
4.13.1.1
4.13.1.2
4.13.1.3
4.13.1.4
4.13.1.5
4 / 277
4.13.5
Осевое перемещение с помощью клавиш .......................................................
75
4.13.6
Декартово перемещение с помощью клавиш ..................................................
75
4.13.7
Конфигурация пространственной мыши ...........................................................
76
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
Содержание
4.13.8
Ориентация пространственной мыши ...............................................................
77
4.13.9
Декартово перемещение с помощью пространственной мыши .....................
78
4.13.10 Инкрементальное перемещение вручную ........................................................
79
4.14 Перемещение дополнительных осей вручную ......................................................
80
4.15 Шунтирование контроля рабочей зоны ..................................................................
80
4.16 Функции индикации ..................................................................................................
81
4.16.1
81
Измерение и индикация потребления энергии .................................................
4.16.2
Индикация актуальной позиции .........................................................................
83
4.16.3
Отображение цифровых входов/выходов .........................................................
83
4.16.4
Отображение аналоговых входов/выходов ......................................................
85
4.16.5
Отображение входов/выходов для внешней автоматики ................................
85
4.16.6
Индикация циклических флагов ........................................................................
87
4.16.7
Индикация флагов ..............................................................................................
87
4.16.8
Индикация счетчика ............................................................................................
88
4.16.9
Индикация таймера ............................................................................................
89
4.16.10 Вывод данных калибровки .................................................................................
90
4.16.11 Индикация информации о роботах и системе управления роботом ..............
91
4.16.12 Показ/обработка данных робота .......................................................................
91
4.17 Экспорт конфигурации системы безопасности (XML-экспорт) .............................
93
5
Первый и повторный ввод в эксплуатацию ........................................
95
5.1
Ассистент ввода в эксплуатацию ............................................................................
95
5.2
Проверка технических данных ................................................................................
95
5.3
Перемещение робота без вышестоящей системы управления безопасностью
96
5.4
Проверка активации модели робота с точным позиционированием ...................
97
5.5
Юстировка ................................................................................................................
98
5.5.1
Методы юстировки ..............................................................................................
99
5.5.2
101
Перемещение осей в предъюстировочное положение с помощью меток юстировки
5.5.3
Перемещение осей в предъюстировочное положение с помощью электронной
контактной измерительной головки ..................................................................................
102
5.5.4
Светодиоды юстировки ......................................................................................
104
5.5.5
Юстировка с помощью SEMD ............................................................................
105
Выполнение первичной юстировки (с помощью SEMD) .............................
Настройка смещения (с помощью SEMD) ...................................................
Проверка юстировки нагрузки со смещением (с помощью SEMD) ............
105
108
109
5.5.6
Юстировка с помощью стрелочного индикатора .............................................
111
5.5.7
Юстировка дополнительных осей .....................................................................
112
5.5.8
Юстировка по исходным данным ......................................................................
113
5.5.9
Юстировка с помощью MEMD и отметки в виде штриха .................................
5.5.5.1
5.5.5.2
5.5.5.3
5.5.9.1
5.5.9.2
5.5.9.3
5.5.9.4
5.5.10
Перемещение A6 в юстировочное положение (по отметке в виде штриха)
Выполнение первичной юстировки (с помощью MEMD) ............................
Настройка смещения (с помощью MEMD) ...................................................
Проверка юстировки нагрузки со смещением (с помощью MEMD) ...........
114
114
115
118
119
Деюстировка осей вручную ................................................................................
120
5.6
Изменение программируемых концевых выключателей ......................................
121
5.7
Калибровка ...............................................................................................................
123
Калибровка инструмента ....................................................................................
123
Калибровка TCP: метод XYZ 4 точки ...........................................................
Калибровка TCP: метод базы отсчета XYZ .................................................
125
127
5.7.1
5.7.1.1
5.7.1.2
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 / 277
KUKA System Software 8.3
5.7.1.3
5.7.1.4
5.7.1.5
Определение ориентации: метод ABC унив. ..............................................
Определение ориентации: метод ABC 2 точки ...........................................
Цифровой ввод ..............................................................................................
128
129
131
Калибровка базы ................................................................................................
131
Метод 3 точек .................................................................................................
Косвенный метод ...........................................................................................
Цифровой ввод ..............................................................................................
132
134
135
Калибровка стационарного инструмента ..........................................................
135
Калибровка внешней ТСР .............................................................................
Цифровой ввод внешнего TCP .....................................................................
Калибровка заготовки: прямой метод ..........................................................
Калибровка заготовки: косвенный метод ....................................................
135
137
138
139
5.7.4
Переименование инструмента/базы .................................................................
140
5.7.5
Линейный блок ....................................................................................................
140
Определение необходимости калибровки линейного блока .....................
Калибровка линейного блока .......................................................................
Цифровой ввод линейного блока .................................................................
141
141
143
Калибровка внешней кинематики ......................................................................
143
Калибровка исходной точки ..........................................................................
Цифровой ввод исходной точки ...................................................................
Калибровка базы инструмента .....................................................................
Цифровой ввод базы инструмента ..............................................................
Калибровка внешнего инструмента .............................................................
Цифровой ввод внешнего инструмента ......................................................
144
146
146
148
148
150
Данные нагрузки ......................................................................................................
150
5.7.2
5.7.2.1
5.7.2.2
5.7.2.3
5.7.3
5.7.3.1
5.7.3.2
5.7.3.3
5.7.3.4
5.7.5.1
5.7.5.2
5.7.5.3
5.7.6
5.7.6.1
5.7.6.2
5.7.6.3
5.7.6.4
5.7.6.5
5.7.6.6
5.8
5.8.1
Проверка нагрузок с помощью KUKA.Load .......................................................
150
5.8.2
Определение нагрузки с помощью KUKA.LoadDataDetermination ..................
151
5.8.3
Ввод данных полезной нагрузки ........................................................................
151
5.8.4
Ввод данных дополнительной нагрузки ............................................................
151
5.8.5
Проверка данных нагрузки онлайн ....................................................................
152
Экспорт/импорт длинных текстов ...........................................................................
153
5.10 Руководство по техобслуживанию .........................................................................
155
5.10.1
Протоколирование техобслуживания ...............................................................
156
5.10.2
Индикация протокола техобслуживания ..........................................................
158
6
Управление программами и проектами .................................................
159
6.1
Создание новой программы ....................................................................................
159
5.9
6.2
Создание новой папки .............................................................................................
159
6.3
Переименование файла или папки ........................................................................
159
6.4
Менеджер файловНавигатор ................................................................................
160
Выбор фильтра ...................................................................................................
161
6.4.1
6.5
Выбор или открытие программы ............................................................................
161
6.5.1
Выбор и отмена программы ...............................................................................
162
6.5.2
Открытие программы .........................................................................................
163
6.5.3
Переключение между навигатором и программой ..........................................
164
6.6
Структура программы KRL ......................................................................................
164
Позиция HOME ...................................................................................................
165
Выделение/затемнение частей программы ...........................................................
166
6.7.1
Выделение/затемнение строки DEF .................................................................
166
6.7.2
Вывод детального вида на дисплей ..................................................................
166
6.6.1
6.7
6 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
Содержание
6.7.3
6.8
Включение/выключение переноса строки .........................................................
167
Редактирование программ ......................................................................................
167
Ввод комментария или штампа .........................................................................
168
6.8.1
6.8.2
Удаление программных строк ............................................................................
169
6.8.3
Другие функции редактирования .......................................................................
169
Распечатка программы ............................................................................................
170
6.10 Архивирование и восстановление данных ............................................................
170
6.9
6.10.1
Обзор архивирования .........................................................................................
170
6.10.2
Архивирование данных на накопитель USB .....................................................
172
6.10.3
Архивирование данных в сети ...........................................................................
172
6.10.4
Архивирование журнала ....................................................................................
173
6.10.5
Восстановление данных .....................................................................................
173
6.10.6
Автоматическое архивирование данных для анализа ошибок (KrcDiag) .......
174
6.11 Управление проектами ............................................................................................
175
6.11.1
Окно Управление проектами ...........................................................................
175
6.11.2
Резервное копирование проектов, пакетов опций и данных RDC ..................
177
6.11.3
Восстановление проектов, пакетов опций и данных RDC ...............................
178
Выполнение программы ..........................................................................
179
7
7.1
Выбор вида выполнения программы ......................................................................
179
7.2
Виды выполнения программы .................................................................................
179
7.3
Предварительное число ..........................................................................................
180
7.4
Указатель записи .....................................................................................................
180
7.5
Установка коррекции программы (POV) .................................................................
183
7.6
Индикация состояния интерпретатора робота ......................................................
184
7.7
Запуск программы вперед (вручную) .....................................................................
184
7.8
Запуск программы вперед (автоматически) ..........................................................
185
7.9
Выбор записи ...........................................................................................................
185
7.10 Сброс программы .....................................................................................................
186
7.11 Запуск режима внешней автоматики ......................................................................
186
7.12 Перемещение назад посредством клавиши обратного пуска ..............................
187
7.12.1
Выполнение движений в обратном направлении ............................................
187
7.12.2
Принцип действия и особенности движения в обратном направлении .........
188
Особенности при использовании подпрограмм ..........................................
Особенности при сглаживании .....................................................................
Особенности при колебательных движениях ..............................................
Переход от движения назад к движению вперед ........................................
188
189
190
191
8
Основы программирования движений .................................................
193
8.1
Обзор видов движений ............................................................................................
193
8.2
Вид движения РТР ...................................................................................................
193
8.3
Вид движения LIN ....................................................................................................
194
8.4
Вид движения CIRC .................................................................................................
194
8.5
Сглаживание .............................................................................................................
195
8.6
Контроль ориентации LIN, CIRC .............................................................................
196
8.7
Вид движения Spline ................................................................................................
197
8.7.1
Профиль скоростей движений Spline ................................................................
199
8.7.2
Выбор записи при движениях Spline .................................................................
200
8.7.3
Изменения в блоках Spline .................................................................................
202
7.12.2.1
7.12.2.2
7.12.2.3
7.12.2.4
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
7 / 277
KUKA System Software 8.3
8.7.4
Сглаживание движений Spline ...........................................................................
204
8.7.5
Замена сглаженного перемещения CP блоком Spline ....................................
205
Переход SLIN-SPL-SLIN ................................................................................
208
Контроль ориентации CP-Spline .............................................................................
208
8.7.5.1
8.8
8.8.1
Комбинации функций Контроль ориентации и Круговой контур, контроль
ориентации ........................................................................................................................
211
8.9
Угол круга .................................................................................................................
212
8.10 Сингулярность ..........................................................................................................
212
9
Программирование для группы "Пользователь" (встроенные формуляры)
........................................................................................................................ 215
9.1
Имена во встроенных формулярах ........................................................................
215
9.2
Программирование движений PTP, LIN, CIRC ......................................................
215
9.2.1
Программирование движения РТР ...................................................................
215
9.2.2
Встроенный формуляр PTP ...............................................................................
216
9.2.3
Программирование движения LIN .....................................................................
216
9.2.4
Встроенный формуляр LIN ................................................................................
217
9.2.5
Программирование движения CIRC ..................................................................
217
9.2.6
Встроенный формуляр CIRC .............................................................................
218
9.2.7
Окно опций Фреймы ..........................................................................................
219
9.2.8
Окно опции Параметры перемещения (LIN, CIRC, PTP) ..............................
219
Программирование движений Spline .....................................................................
220
9.3.1
Указания по программированию движений Spline ...........................................
220
9.3.2
Программирование блока Spline .......................................................................
221
Встроенный формуляр блока CP-Spline ......................................................
Встроенный формуляр Блок PTP SPLINE ..................................................
Окно опции Фреймы (блок CP- и PTP-Spline) ............................................
Окно опции Параметры перемещения (блок CP-Spline) ..........................
Окно опции Параметры перемещения (блок PTP-Spline) ........................
222
223
224
224
225
Программирование сегментов блока Spline .....................................................
226
Программирование сегмента SPL или SLIN ...............................................
Программирование сегмента SCIRC ...........................................................
Встроенный формуляр сегмента CP-Spline ................................................
Программирование сегмента SPTP .............................................................
Встроенный формуляр сегмента SPTP .......................................................
Окно опции Фреймы (сегменты CP- и PTP-Spline) ....................................
Окно опции Параметры перемещения (сегмент CP-Spline) ....................
Окно опции Параметры перемещения (SPTP) .........................................
Окно опции Логические параметры ..........................................................
Заучивание пространственного смещения логических параметров .........
226
226
227
228
229
230
230
231
232
236
Программирование отдельных движений Spline .............................................
237
Программирование отдельного движения SLIN .........................................
Встроенный формуляр SLIN .........................................................................
Окно опции Параметры перемещения (SLIN) ...........................................
Программирование отдельного движения SCIRC ......................................
Встроенный формуляр SCIRC ......................................................................
Окно опции Параметры перемещения (SCIRC) .......................................
Программирование отдельного движения SPTP ........................................
Встроенный формуляр SPTP .......................................................................
237
237
238
239
239
240
241
242
Условный останов ..............................................................................................
242
Встроенный формуляр Spline Stop Condition ...........................................
243
9.3
9.3.2.1
9.3.2.2
9.3.2.3
9.3.2.4
9.3.2.5
9.3.3
9.3.3.1
9.3.3.2
9.3.3.3
9.3.3.4
9.3.3.5
9.3.3.6
9.3.3.7
9.3.3.8
9.3.3.9
9.3.3.10
9.3.4
9.3.4.1
9.3.4.2
9.3.4.3
9.3.4.4
9.3.4.5
9.3.4.6
9.3.4.7
9.3.4.8
9.3.5
9.3.5.1
8 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
Содержание
9.3.5.2
Условие останова: пример и тормозные характеристики ..........................
245
Область неизменного движения в блоке CP-Spline .........................................
246
Выбор строки в область неизменного движения ........................................
Максимальные пределы ................................................................................
247
248
9.4
Изменение параметров движения ..........................................................................
249
9.5
Повторное программирование точки ......................................................................
249
9.6
9.3.6
9.3.6.1
9.3.6.2
Программирование логических команд ..................................................................
250
9.6.1
Входы/выходы .....................................................................................................
250
9.6.2
Установка цифрового выхода – OUT ................................................................
250
9.6.3
Встроенный формуляр OUT ...............................................................................
250
9.6.4
Установка импульсного выхода – PULSE .........................................................
251
9.6.5
Встроенный формуляр PULSE ..........................................................................
251
9.6.6
Установка аналогового выхода — ANOUT .......................................................
252
9.6.7
Встроенный формуляр ANOUT статический ....................................................
252
9.6.8
Встроенный формуляр ANOUT динамический .................................................
252
9.6.9
Программирование времени ожидания — WAIT ..............................................
253
9.6.10
Встроенный формуляр WAIT .............................................................................
253
9.6.11
Программирование зависимой от сигнала функции ожидания — WAITFOR
254
9.6.12
Встроенный формуляр WAITFOR ......................................................................
254
9.6.13
Переключение на траектории – SYN OUT ........................................................
255
9.6.14
Встроенный формуляр SYN OUT, опция START/END .....................................
256
9.6.15
Встроенный формуляр SYN OUT, опция PATH ................................................
258
9.6.16
Установка импульсов на траектории — SYN PULSE .......................................
260
9.6.17
Встроенный формуляр SYN PULSE ..................................................................
261
9.6.18
Изменение логической команды ........................................................................
262
Сервис KUKA ..............................................................................................
263
10.1 Запрос службы поддержки ......................................................................................
263
10.2 Сервисная служба KUKA .........................................................................................
263
Индекс ..........................................................................................................
271
10
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
9 / 277
KUKA System Software 8.3
10 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
1 Введение
1
Введение
д
1.1
Целевая группа
Данная документация предназначена для пользователей со следующими знаниями:
основные знания о промышленных роботах.
Для оптимального использования нашей продукции мы рекомен
дуем нашим заказчиками пройти обучение в колледже компании
KUKA. Информацию об учебной программе можно найти на сайте www.kuka.com или получить непосредственно в филиалах компании.
1.2
Документация к промышленному роботу
Документация по промышленному роботу состоит из следующих разделов:
документация по механике робота;
документация по системе управления роботом;
инструкция по использованию и программированию программного
обеспечения системы;
инструкции по опциональному оборудованию и принадлежностям;
каталог деталей на электронном носителе данных.
Каждая инструкция представляет собой отдельный документ.
1.3
Изображение указаний
Безопасность
Данные указания служат для обеспечения безопасности и обязательны
для выполнения.
Эти указания означают наличие неизбежной
опасности или большой вероятности смертельного исхода или тяжелых телесных травм в случае, если не будут приняты меры предосторожности.
Эти указания означают возможность смертель
ного исхода или тяжелых телесных повреждений
в случае, если не будут приняты меры предосторожности.
Эти указания означают возможность легких те
лесных повреждений в случае, если не будут
приняты меры предосторожности.
Эти указания означают возможность материаль
ного ущерба в случае, если не будут приняты
меры предосторожности.
Эти указания содержат ссылки на информацию по безопасности
или общие меры безопасности.
Они не относятся к отдельным опасностям или мерам предосто
рожности.
Это указание служит для напоминания о порядке действий, предпринимаемых для предотвращения или устранения аварийных ситуаций или
неполадок:
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
11 / 277
KUKA System Software 8.3
Порядок действий, отмеченный данным указанием,
требует неукоснительного соблюдения.
Указания
Эти указания служат для облегчения работы или содержат ссылки на дополнительную информацию.
Указание для облегчения работы или ссылка на дополнительную
информацию.
1.4
Товарные марки
Windows является товарной маркой компании Microsoft Corporation.
WordPad является товарной маркой компании Microsoft Corporation.
12 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
2 Описание продукта
2
Описание продукта
2.1
Обзор промышленного робота
2
Промышленный робот состоит из следующих компонентов:
д
манипулятор;
система управления роботом;
переносное программирующее устройство;
соединительные кабели;
программное обеспечение;
дополнительное оборудование, принадлежности.
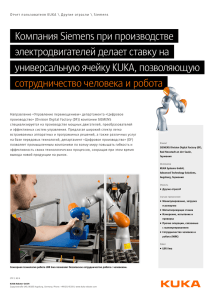
Рис. 2-1: Пример промышленного робота
2.2
1
Манипулятор
3
Переносное программирующее устройство
2
Система управления роботом
4
Соединительные кабели
Обзор системного программного обеспечения KUKA (KSS)
Описание
Системное программное обеспечение KUKA (KSS) выполняет все основные функции для эксплуатации промышленных роботов.
Проектирование траектории
Диспетчерские функции ввода-вывода
Управление данными и файлами
и т. п.
Могут быть установлены дополнительные технологические пакеты, содержащие инструкции по данному приложению и конфигурации.
smartHMI
Пользовательский интерфейс системного программного обеспечения
KUKA называется KUKA smartHMI (smart Human-Machine Interface, интеллектуальный интерфейс «пользователь-машина»).
Особенности интерфейса:
функция управления пользователями;
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
13 / 277
KUKA System Software 8.3
программный редактор;
робототехнический язык KRL – KUKA Robot Language;
встроенные формуляры для программирования;
индикация сообщений;
конфигурационное окно;
и другие функции.
(>>> 4.2 "Пользовательский интерфейс KUKA smartHMI" Страница 49)
В зависимости от пользовательских настроек панель управления может
отличаться от стандартной.
2.3
Системные требования
KSS 8.3 можно применять в следующих системах управления роботом:
2.4
KR C4;
с Windows Embedded Standard 7 V4.x;
и с 2 Гб рабочей памяти.
Использование системного программного обеспечения KUKA по назначению
Использование
Системное программное обеспечение KUKA предназначено только для
эксплуатации промышленного робота KUKA или управления кинематикой заказчика.
Версиями программного обеспечения KUKA разрешается пользоваться
только при соблюдении заданных системных требований.
Использование
не по назначению
Любое использование, отличающееся от использования по назначению,
рассматривается как неправильное и не допускается. За повреждения,
возникающие вследствие неправильного использования, фирма KUKA
Roboter GmbH ответственности не несет. В этом случае всю ответственность несет эксплуатирующая сторона.
К использованию не по назначению относится, например:
2.5
работа с кинематикой, не являющейся промышленным роботом
KUKA или кинематикой заказчика;
работа с KKS при условиях, отличающихся от заданных системных
требований.
Накопители USB KUKA
Для системы управления роботом KR C4 существуют следующие накопители USB KUKA:
Накопитель USB KUKA 2.0 NB 4ГБ
Носитель данных для программного обеспечения и архивов
Без возможности загрузки
№ арт. 00-197-266
Накопитель USB KUKA.Recover 2.1 8ГБ
14 / 277
Для создания и восстановления системных изображений
С возможностью загрузки
№ арт. 00-220-397
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
2 Описание продукта
Рис. 2-2: Накопитель USB KUKA 2.0 NB 4ГБ, (№ арт. 00-197-266)
Рис. 2-3: Накопитель USB KUKA.Recover 2.1 8ГБ (№ арт. 00-220-397)
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
15 / 277
KUKA System Software 8.3
16 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
3 Безопасность
3
Безопасность
з
3.1
Общая информация
т
3.1.1
Указание об ответственности
Устройство, описанное в настоящем документе, представляет собой
промышленный робот или один из его компонентов.
Компоненты промышленного робота:
Манипулятор
Система управления роботом
Ручной программатор
Соединительные кабели
Дополнительные оси (дополнительное оборудование)
например, линейный блок, поворотный откидной стол, устройство позиционирования
Программное обеспечение
Дополнительное оборудование, принадлежности
Промышленный робот выполнен в соответствии с существующим уровнем развития техники и общепринятыми правилами техники безопасности. Однако при неправомерном применении, не отвечающем его
назначению, существует опасность для жизни и здоровья, а также риск
повреждения промышленного робота и материального ущерба.
Эксплуатация промышленного робота допускается только в безупречном техническом состоянии, а также согласно назначению и с учетом
предписаний по технике безопасности и существующих рисков. Эксплуатация должна осуществляться согласно настоящему документу и декларации изготовителя, входящей в комплект поставки промышленного
робота. Неисправности, которые могут отрицательно повлиять на безопасность, необходимо незамедлительно устранять.
Информация по
технике безопасности
Указания по технике безопасности не могут быть истолкованы против
фирмы KUKA Roboter GmbH. Даже при соблюдении всех указаний по технике безопасности нет гарантии того, что в рамках эксплуатации промышленного робота исключена опасность травм или материального
ущерба.
Без разрешения фирмы KUKA Roboter GmbH вносить какие-либо изменения в конструкцию промышленного робота запрещено. В состав промышленного робота могут быть включены дополнительные компоненты
(инструменты, программное обеспечение и т. д.), не входящие в комплект поставки фирмы KUKA Roboter GmbH. Ответственность за повреждения промышленного робота или иного имущества, причиненные в
связи с установкой данных компонентов, несет пользователь.
Кроме главы «Безопасность» в данной документации содержатся дополнительные указания по технике безопасности. Они также подлежат обязательному соблюдению.
3.1.2
Использование промышленного робота по назначению
Промышленный робот предназначен исключительно для использования,
описанного в инструкции по эксплуатации либо инструкции по монтажу в
главе «Целевое назначение».
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
17 / 277
KUKA System Software 8.3
Любое использование, отличающееся от использования по назначению,
рассматривается как неправильное и не допускается. За повреждения,
возникающие вследствие неправильного использования, производитель
ответственности не несет. В этом случае всю ответственность несет эксплуатирующая сторона.
К использованию по назначению относится также соблюдение инструкций по эксплуатации и монтажу отдельных компонентов, а также, в частности, следование предписаниям по техническому обслуживанию.
Использование
не по назначению
3.1.3
Любое использование, отличающееся от использования по назначению,
рассматривается как неправильное и не допускается. К такому использованию относится, например:
транспортировка людей и животных;
использование в качестве помоста;
нарушение указанных в спецификации пределов эксплуатационной
нагрузки;
использование во взрывоопасных зонах;
использование без дополнительных защитных приспособлений;
использование под открытым небом;
использование для подземных работ.
Декларация о соответствии требованиям ЕС и декларация изготовителя
Данный промышленный робот является неполной машиной в соответствии с Директивой ЕС по машиностроению. Ввод промышленного робота
в эксплуатацию разрешается только при выполнении указанных ниже условий.
Промышленный робот интегрирован в установку.
Или: промышленный робот образует вместе с другими машинами
единую установку.
Или: промышленный робот оснащен всеми предохранительными устройствами и защитными приспособлениями, предусмотренными
для полной машины согласно Директиве ЕС по машиностроению.
Декларация о
соответствии
Установка соответствует Директиве ЕС по машиностроению. Данный
факт подтвержден методом оценки соответствия.
Системный интегратор должен составить декларацию о соответствии
всей установки согласно Директиве по машиностроению. Декларация о
соответствии является основополагающим фактором для нанесения
маркировки CE на установку. Эксплуатация промышленного робота допускается только в соответствии с действующими государственными законами, предписаниями и нормативами.
Системе управления роботом присвоен сертификат CE согласно Директиве по электромагнитной совместимости и Директиве по низковольтному оборудованию.
Декларация
изготовителя
Промышленный робот, являющийся неполной машиной, поставляется
вместе с декларацией изготовителя согласно Приложению IIA B Директивы по машиностроению 2006/42/ЕС. В комплект данной декларации изготовителя входит список выполненных принципиальных требований
согласно Приложению I и инструкция по монтажу.
В своей декларации изготовитель заявляет, что ввод в эксплуатацию неполной машины запрещен до тех пор, пока неполная машина не войдет
в состав другой машины, либо не будет собрана вместе с другими деталями в такую машину, которая отвечает положениям Директивы ЕС по
18 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
3 Безопасность
машиностроению и на которую имеется Декларация о соответствии тре
бованиям ЕС согласно Приложению IIA A.
3.1.4
Используемые термины
STOP 0, STOP 1 и STOP 2 являются определениями останова согласно
EN 60204-1:2006.
Понятие
Описание
Зона оси
Зона действия каждой оси, указанная в градусах или миллиметрах,
в пределах которой она может перемещаться. Зона перемещения
оси должна определяться для каждой оси отдельно.
Остановочный путь
Остановочный путь = путь реакции + тормозной путь
Остановочный путь является частью опасной зоны.
Рабочая зона
Зона, в которой манипулятор может передвигаться. Рабочая зона
состоит из отдельных зон осей.
Пользователь
Пользователем промышленного робота может быть предприниматель, работодатель или уполномоченное лицо, несущее ответственность за эксплуатацию промышленного робота.
Опасная зона
Опасная зона включает в себя рабочую зону и остановочные пути
манипулятора и дополнительных осей (опция).
Срок службы
Срок службы важных для безопасности деталей начинается с
момента ее поставки заказчику.
На продолжительность срока службы не влияет фактическая продолжительность эксплуатации детали, так как важные для безопасности детали подвергаются старению и во время хранения.
Пульт управления
KUKA smartPAD
См. раздел «Пульт управления smartPAD»
Манипулятор
Механика робота и соответствующее электрооборудование
Безопасная зона
Безопасная зона находится за пределами опасной зоны.
Безопасный рабочий останов
Безопасный рабочий останов – это функция контроля останова. Он
не останавливает перемещение самого робота, а контролирует
состояние останова осей робота. Если оси перемещаются при безопасном рабочем останове, срабатывает безопасный останов
STOP 0.
Безопасный рабочий останов также можно выполнить внешними
средствами.
При срабатывании безопасного рабочего останова система управления роботом задействует выход к магистральной шине. Выход
также задействуется в том случае, если к моменту срабатывания
остановлены не все оси, что ведет к срабатыванию безопасного
останова STOP 0.
Безопасный останов STOP 0
Останов, который выполняется по команде системы управления
безопасностью. Система управления безопасностью мгновенно
отключает приводы и подачу питания к тормозам.
Указание: этот останов обозначается в настоящей документации
как безопасный останов 0.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
19 / 277
KUKA System Software 8.3
Понятие
Описание
Безопасный останов STOP 1
Останов, который выполняет и контролирует система управления
безопасностью. Процесс торможения выполняется компонентом
системы управления роботом, который не относится к безопасности, и контролируется системой управления безопасностью. Как
только манипулятор останавливается, система управления безопасностью отключает приводы и подачу питания к тормозам.
При срабатывании безопасного останова STOP 1 система управления роботом задействует выход к магистральной шине.
Безопасный останов STOP 1 также можно выполнить внешними
средствами.
Указание: этот останов обозначается в настоящей документации
как безопасный останов 1.
Безопасный останов STOP 2
Останов, который выполняет и контролирует система управления
безопасностью. Процесс торможения выполняется компонентом
системы управления роботом, который не относится к безопасности, и контролируется системой управления безопасностью. Приводы остаются включенными, а тормоза – разомкнутыми. Сразу
после остановки манипулятора срабатывает безопасный рабочий
останов.
При срабатывании безопасного останова STOP 2 система управления роботом задействует выход к магистральной шине.
Безопасный останов STOP 2 также можно выполнить внешними
средствами.
Указание: этот останов обозначается в настоящей документации
как безопасный останов 2.
Опции безопасности
Общее название для опций, которые обеспечивают возможность
конфигурации функций контроля в дополнение к стандартным функциям безопасности.
Пример: SafeOperation
Пульт управления
smartPAD
Категория останова 0
Ручной программатор для KR C4
Пульт smartPAD имеет все возможности управления и индикации,
необходимые для управления промышленным роботом и его программирования.
Приводы незамедлительно отключаются, после чего срабатывают
тормоза. Манипулятор и дополнительные оси (опция) останавливаются вблизи траектории перемещения.
Указание: эта категория останова обозначается в данной документации как STOP 0.
Категория останова 1
Манипулятор и дополнительные оси (опция) останавливаются
точно на траектории перемещения.
Режим работы T1: происходит отключение приводов сразу после останова робота, но не позднее чем через 680 мс.
Режимы работы T2, AUT, AUT EXT: происходит отключение приводов через 1,5 секунды.
Указание: эта категория останова обозначается в данной документации как STOP 1.
Категория останова 2
Приводы не отключаются, а тормоза не срабатывают. Манипулятор
и дополнительные оси (опция) останавливаются со временем торможения согласно траектории перемещения.
Указание: эта категория останова обозначается в данной документации как STOP 2.
20 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
3 Безопасность
Понятие
Описание
Системный интегратор
(интегратор установок)
Системный интегратор несет ответственность за интеграцию промышленного робота в установку и его ввод в эксплуатацию с учетом
требований техники безопасности.
T1
Тестовый режим работы «Вручную, пониженная скорость»
(<= 250 мм/с)
T2
Тестовый режим работы «Вручную, высокая скорость» (допускается
> 250 мм/с)
Дополнительная ось
Ось движения, не являющаяся частью манипулятора, однако
управляемая системой управления роботом. Например, линейный
блок KUKA, поворотный откидной стол, Posiflex.
3.2
Персонал
При эксплуатации промышленного робота определены следующие лица
или группы лиц:
Пользователь
Персонал
Все сотрудники, работающие с промышленным роботом, должны прочесть и понять прилагаемую к роботу документацию и содержащуюся в ней главу о мерах безопасности.
Пользователь
Персонал
Пользователь должен соблюдать правовые предписания по охране труда. Например:
пользователь должен обязательно осуществлять общий контроль;
пользователь обязан проводить инструктаж в установленный срок.
Перед началом проведения работ персонал должен быть проинструктирован относительно вида и объема работ, а также относительно возможных рисков. Регулярно проводить инструктаж персонала. Кроме того, в
случае особых происшествий или после внесения технических изменений инструктаж персонала следует провести повторно.
К персоналу относятся:
Cистемный интегратор
Пользователи, подразделяемые на:
Персонал для выполнения работ по вводу в эксплуатацию, техническому и сервисному обслуживанию
Оператор
Mладший обслуживающий персонал
Монтаж, замена, настройка, управление, техническое обслуживание и ремонт должны выполняться только в соответствии с
предписаниями, приведенными в инструкции по эксплуатации
или монтажу соответствующего компонента промышленного робота, и
только специально обученным для этого персоналом.
Системный
интегратор
В обязанности системного интегратора входит интеграция промышленного робота в установку в соответствии с предписаниями по технике бе
зопасности.
Системный интегратор отвечает за выполнение следующих задач:
установка промышленного робота;
подключение промышленного робота;
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
21 / 277
KUKA System Software 8.3
Пользователь
системы
выполнение оценки рисков;
применение необходимых предохранительных устройств и защитных
приспособлений;
составление декларации о соответствии;
нанесение знака CE;
составление руководства по эксплуатации установки.
Оператор должен выполнить следующие требования:
для выполнения надлежащих работ пользователь системы должен
пройти соответствующее обучение;
выполнение манипуляций на промышленном роботе разрешено
только квалифицированному персоналу. Таким квалифицированным
персоналом являются сотрудники, имеющие специализированное
образование, знания и опыт, а также знающие соответствующие нормативы, на основании чего они способны проанализировать выполняемые работы и оценить возможность возникновения опасных
ситуаций.
Работы на электрических и механических узлах промышленного
робота разрешается проводить только специализированному
персоналу.
3.3
Рабочая, безопасная и опасная зоны
Рабочие зоны должны быть ограничены до необходимого минимума. Рабочую зону необходимо оградить защитными приспособлениями.
Защитные приспособления (например, защитные двери) должны находиться в пределах безопасной зоны. Активирование останова приводит
к торможению манипуляторов и дополнительных осей (опция) и их остановке в опасной зоне.
Опасная зона включает в себя рабочую зону и остановочные пути манипулятора и дополнительных осей (опция). Вокруг них необходимо установить заграждающие защитные приспособления, чтобы предотвратить
опасность для персонала или опасность нанесения материального
ущерба.
3.3.1
Определение остановочных путей
При оценке риска системным интегратором для определенных случаев
применения может понадобиться определить остановочные пути. Для
определения остановочных путей системный интегратор должен иденти
фицировать влияющие на безопасность места на запрограммированной
траектории.
При определении необходимо перемещать робота с тем инструментом и
с теми нагрузками, которые будут применяться в конкретном случае применения. Робот должен быть разогрет до рабочей температуры. Рабочая
температура достигается спустя прибл. 1 час работы в нормальном режиме.
При обкатке робота для конкретного случая применения робота следует
остановить в том месте, начиная с которого необходимо начать определение остановочного пути. Многократно повторить данную процедуру с
помощью безопасного останова 0 и безопасного останова 1. Определяющим является самый неблагоприятный остановочный путь.
Безопасный останов 0 можно вызвать, например, посредством активации безопасного рабочего останова на предохранительном интерфейсе.
22 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
3 Безопасность
Если установлена опция безопасности, этот безопасный останов также
можно вызвать, например, нарушив границы зоны (например, когда робот в автоматическом режиме выходит за пределы границ активирован
ной рабочей зоны).
Безопасный останов 1 можно вызвать, например, посредством задействования устройства АВАРИЙНОГО ОСТАНОВА на пульте управления
smartPAD.
3.4
Инициатор реакций останова
Реакции останова промышленного робота происходят вследствие действий оператора или в качестве реакции на процедуры контроля и сообщения об ошибках. Ниже в таблице приведены реакции останова в
зависимости от установленного режима работы.
Инициатор
Отпускание клавиши
запуска
T1, T2
AUT, AUT EXT
STOP 2
-
Нажатие клавиши останова
STOP 2
Приводы ВЫКЛ.
STOP 1
Отмена входного сигнала деблокировки
перемещения
STOP 2
Отключение подачи
напряжения с помощью
главного выключателя
или сбой подачи напряжения
STOP 0
Внутренняя ошибка в
компоненте системы
управления, не относящемся к безопасности
STOP 0 или STOP 1
(зависит от причины ошибки)
Смена режима работы
во время эксплуатации
Безопасный останов 2
Открытие защитной
двери (защиты оператора)
-
Безопасный останов 1
Отпускание кнопки подтверждения
Безопасный останов 2
-
Нажатие кнопки подтверждения до отказа
или ошибка
Безопасный останов 1
-
Задействование АВАРИЙНОГО ОСТАНОВА
Безопасный останов 1
Ошибка в системе
управления безопасностью или в периферийном оборудовании
системы управления
безопасностью
Безопасный останов 0
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
23 / 277
KUKA System Software 8.3
3.5
Предохранительные устройства
3.5.1
Обзор предохранительных устройств
Промышленный робот обладает следующими предохранительными
функциями:
выбор режимов работы
защита оператора (= соединение для блокировки заграждающих защитных приспособлений)
устройство АВАРИЙНОГО ОСТАНОВА
устройство подтверждения
внешний безопасный рабочий останов
внешний безопасный останов 1 (не для системы управления исполнения «KR C4 compact»)
внешний безопасный останов 2
контроль скорости в T1
Функции безопасности промышленного робота соответствуют следующим требованиям:
категория 3 и Performance Level d согласно EN ISO 13849-1:2008;
Однако данные требования выполняются только при соблюдении следующего условия:
устройство АВАРИЙНОГО ОСТАНОВА приводится в действие не
реже одного раза в 6 месяцев.
К функциям безопасности относятся следующие компоненты:
система управления безопасностью в управляющем ПК
KUKA smartPAD
шкаф управления (Cabinet Control Unit - CCU)
преобразователь сигнала синус.-косинус. преобразователя в цифровую форму (Resolver Digital Converter – RDC)
блок питания KUKA Power Pack (KPP)
регулятор KUKA Servo Pack (KSP)
интерфейсная плата безопасности (Safety Interface Board - SIB) (если
используется)
Кроме того, существуют интерфейсы для связи с компонентами вне промышленного робота и другими системами управления роботом.
Без функционирующих предохранительных уст
ройств и защитных приспособлений промышлен
ный робот может стать причиной травм и материального ущерба. Если
предохранительные устройства и защитные приспособления дезакти
вированы или демонтированы, эксплуатация промышленного робота
запрещена.
При планировании установки следует дополнительно учитывать
и рассчитывать функции безопасности всей установки. Следует
интегрировать промышленный робот в систему безопасности
всей установки.
24 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
3 Безопасность
3.5.2
Система управления безопасностью
Система управления безопасностью – устройство внутри управляющего
ПК. Она сочетает в себе сигналы и системы контроля, относящиеся к безопасности.
Задачи системы управления безопасностью:
3.5.3
выключение приводов, срабатывание тормозов;
контроль времени торможения;
контроль простоя (после останова);
контроль скорости в T1;
оценка сигналов, относящихся к безопасности;
установка выходов, относящихся к безопасности.
Выбор режима работы
Промышленный робот может эксплуатироваться в следующих режимах
работы:
режим «Вручную, пониженная скорость» (T1);
режим «Вручную, высокая скорость» (Т2);
автоматический режим (AUT);
режим внешней автоматики (AUT EXT).
Не изменять режим работы во время обработки программы. При
изменении режима работы во время обработки программы про
мышленный робот остановится в режиме безопасного остано
ва 2.
Режим
работы
Использование
Скорости
T1
для режима тестирования, программирования и обучения;
запрограммированная скорость, максимум 250 мм/с
AUT
AUT EXT
ручной режим:
скорость перемещения вручную, максимум 250 мм/с
T2
Верификация программы:
Верификация программы:
запрограммированная скорость
Для режима тестирования
ручной режим: невозможен
для промышленных
роботов без системы
управления верхнего
уровня;
Программный режим:
Для промышленных
роботов с системой
управления верхнего
уровня, например,
ПЛК
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
запрограммированная скорость
ручной режим: невозможен
Программный режим:
запрограммированная скорость
ручной режим: невозможен
25 / 277
KUKA System Software 8.3
3.5.4
Сигнал «Защита оператора»
Сигнал «Защита оператора» служит для блокировки разделительных защитных приспособлений, например, защитных дверей. Без данного сигнала работа в автоматическом режиме невозможна. При потере сигнала
во время работы в автоматическом режиме (например, при открытии защитных дверей) манипулятор переключается в режим безопасного останова 1.
В режимах тестирования «Вручную, пониженная скорость» (T1) и «Вручную, высокая скорость (T2)» система защиты оператора не активизирована.
После потери сигнала разрешается продолжать
работу в автоматическом режиме только после за
крывания защитного приспособления и квитирования этого закрывания.
Необходимость квитирования предотвращает возобновление работы в
автоматическом режиме по неосторожности, когда в опасной зоне находятся люди, например, при непреднамеренном закрывании защитной
двери.
Процесс квитирования должно быть организован таким образом, чтобы
предварительно проводилась фактическая проверка опасной зоны.
Другие типы квитирования (например, автоматическое квитирование
после закрывания защитного устройства) не допускаются.
За выполнение данных требований ответственность несет системный
интегратор. Несоблюдение требований может привести к гибели людей, тяжелым травмам или материальному ущербу.
3.5.5
Устройство АВАРИЙНОГО ОСТАНОВА
Промышленный робот оснащен устройством АВАРИЙНОГО ОСТАНОВА
на smartPAD. Данное устройство необходимо задействовать в опасной
или аварийной ситуации.
Реакция промышленного робота при задействовании устройства АВАРИЙНОГО ОСТАНОВА:
Манипулятор и дополнительные оси (опция) переключаются в режим
безопасного останова 1.
Для продолжения работы устройство АВАРИЙНОГО ОСТАНОВА следует деблокировать посредством вращения.
Если от инструментов или других устройств, соединенных с манипулятором, может исходить
опасность, необходимо интегрировать их в контур АВАРИЙНОГО ОСТАНОВА на установке.
Несоблюдение данного предупреждения может привести к гибели людей, тяжелым травмам или значительному материальному ущербу.
Следует установить не менее одного внешнего устройства АВАРИЙНОГО ОСТАНОВА. В этом случае устройство АВАРИЙНОГО ОСТАНОВА
доступно даже при отключенном устройстве smartPAD.
(>>> 3.5.7 "Внешнее устройство АВАРИЙНОГО ОСТАНОВА" Страница 27)
26 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
3 Безопасность
3.5.6
Выход из вышестоящей системы управления безопасностью
Если система управления роботом соединена с вышестоящей системой
управления безопасностью, то это соединение принудительно прерывается в следующих случаях:
отключение подачи напряжения с помощью главного выключателя
системы управления роботом;
или сбой подачи напряжения;
выключение системы управления роботом с помощью smartHMI;
активация проекта WorkVisual из WorkVisual или прямо в системе управления роботом;
изменения в Ввод в эксплуатацию > Конфигурация сети;
изменения в Конфигурация > Конфигурация системы безопасности;
Драйвер ввода/вывода > Реконфигурировать
восстановление архива.
Последствие прерывания:
В случае использования дискретного предохранительного интерфейса прерывание соединения приводит к аварийному останову всей установки.
В случае использования защитного интерфейса Ethernet система управления безопасностью KUKA передает сигнал, который предотвращает срабатывание АВАРИЙНОГО ОСТАНОВА для всей установки
со стороны вышестоящей системы управления.
В случае использования предохранительного интерфейса Ethernet: При оценке риска системный интегратор должен учитывать,
может ли представлять опасность тот факт, что выключение системы управления роботом не приведет к срабатыванию АВАРИЙНОГО
ОСТАНОВА всей установки, а также разработать способ противодействия такой опасности.
Несоблюдение данного предупреждения может привести к гибели людей, травмам или материальному ущербу.
Если система управления роботом отключена, то
устройство АВАРИЙНОГО ОСТАНОВА на
smartPAD не действует. Пользователь должен позаботиться о том, чтобы smartPAD был закрыт или удален из установки. Это необходимо для
того, чтобы не перепутать действующие и недействующие устройства
АВАРИЙНОГО ОСТАНОВА.
Несоблюдение данного предупреждения может привести к гибели лю
дей, травмам или материальному ущербу.
3.5.7
Внешнее устройство АВАРИЙНОГО ОСТАНОВА
На каждой станции управления, которая может выполнить перемещение
робота или создать другую опасную ситуацию, должно быть установлено
устройство АВАРИЙНОГО ОСТАНОВА. За это несет ответственность
системный интегратор.
Следует установить не менее одного внешнего устройства АВАРИЙНО
ГО ОСТАНОВА. В этом случае устройство АВАРИЙНОГО ОСТАНОВА
доступно даже при отключенном устройстве smartPAD.
Внешние устройства АВАРИЙНОГО ОСТАНОВА подключаются через
интерфейс пользователя. Внешние устройства АВАРИЙНОГО ОСТАНОВА не входят в комплект поставки промышленного робота.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
27 / 277
KUKA System Software 8.3
3.5.8
Устройство подтверждения
Устройство подтверждения промышленного робота представляет собой
переключатели подтверждения на smartPAD.
На smartPAD расположено 3 переключателя подтверждения. Каждый из
переключателей подтверждения имеет три положения:
не нажат;
среднее положение;
нажат до отказа (экстренное положение).
В тестовых режимах работы перемещение манипулятора возможно
лишь при удержании переключателя подтверждения в среднем положе
нии.
При отпускании переключателя подтверждения сработает безопасный останов 2.
При нажатии переключателя подтверждения до отказа сработает безопасный останов 1.
В течение макс. 15 секунд можно одновременно удерживать два переключателя подтверждения в среднем положении. Это обеспечивает переход от одного переключателя подтверждения к другому. Если
одновременно удерживать два переключателя подтверждения в
среднем положении в течение более 15 секунд, сработает безопасный останов 1.
При неисправности переключателя подтверждения (клемм) можно остановить промышленный робот следующими способами:
нажать переключатель подтверждения до отказа;
задействовать устройство АВАРИЙНОГО ОСТАНОВА;
отпускание клавиши запуска.
Запрещается фиксировать переключатель под
тверждения клейкой лентой или прочими вспомо
гательными средствами, а также воздействовать на него иным способом.
Существует опасность получения травм, в том числе и смертельных, а
также опасность нанесения материального ущерба.
3.5.9
Внешнее устройство подтверждения
Внешние устройства подтверждения необходимы в том случае, если в
опасной зоне промышленного робота должно находиться несколько лиц.
Внешние устройства подтверждения не входят в комплект поставки про
мышленного робота.
То, через какие интерфейсы можно подключить внешние устройства подтверждения, описано в руководстве по эксплуатации
и в инструкции по монтажу системы управления роботом, глава
«Проектирование».
3.5.10
Внешний безопасный рабочий останов
Безопасный рабочий останов также можно выполнить с помощью входа
в пользовательском интерфейсе. Это состояние будет поддерживаться
до тех пор, пока внешний сигнал будет находиться в состоянии FALSE.
28 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
3 Безопасность
Как только внешний сигнал переключится в состояние TRUE, можно будет снова перемещать манипулятор. Квитирование не требуется.
3.5.11
Внешний безопасный останов 1 и внешний безопасный останов 2
Внешний безопасный останов 1 и внешний безопасный останов 2 могут
быть выполнены с помощью входа в интерфейсе пользователя. Это состояние будет поддерживаться до тех пор, пока внешний сигнал будет
находиться в состоянии FALSE. Как только внешний сигнал переключится в состояние TRUE, можно будет снова перемещать манипулятор. Квитирование не требуется.
Для варианта системы управления «KR C4 compact» внешний
безопасный останов 1 не предлагается.
3.5.12
Контроль скорости в T1
В режиме работы T1 выполняется контроль скорости TOP. Если скорость
превышает 250 мм/с, срабатывает безопасный останов 0.
3.6
Дополнительное защитное оснащение
3.6.1
Пошаговый режим
В режимах работы «Вручную, пониженная скорость» (T1) и «Вручную,
высокая скорость (T2)» система управления роботом может выполнить
программу только в пошаговом режиме. Это означает, что для выполнения программы переключатель подтверждения и клавиша пуска должны
удерживаться нажатыми.
3.6.2
При отпускании переключателя подтверждения сработает безопасный останов 2.
При нажатии переключателя подтверждения до отказа сработает безопасный останов 1.
При отпускании клавиши пуска сработает останов 2.
Программируемые концевые выключатели
Зоны всех осей манипулятора и осей позиционирования ограничиваются
регулируемыми программируемыми концевыми выключателями. Данные программируемые концевые выключатели служат исключительно
для защиты машины, и их необходимо отрегулировать таким образом,
чтобы манипулятор/устройство позиционирования не сталкивались с механическими концевыми упорами.
Программируемые концевые выключатели настраиваются в процессе
ввода промышленного робота в эксплуатацию.
Дополнительные сведения приведены в инструкции по эксплуа
тации и программированию.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
29 / 277
KUKA System Software 8.3
3.6.3
Механические концевые упоры
Зоны основных осей и осей руки манипулятора, в зависимости от исполнения робота, частично ограничены механическими концевыми упорами
с амортизаторами.
На дополнительных осях можно установить отдельные концевые упоры.
При столкновении манипулятора или одной из до
полнительных осей с препятствием, механическим концевым упором или устройством ограничения зоны оси дальнейшая безопасная эксплуатация манипулятора не гарантируется.
Манипулятор необходимо вывести из эксплуатации, и перед его повторным вводом в эксплуатацию следует проконсультироваться со специалистами компании KUKA Roboter GmbH (>>> 10 "Сервис KUKA"
Страница 263).
3.6.4
Механическое устройство ограничения зоны оси (опция)
На некоторых манипуляторах оси от A1 до A3 могут быть оснащены механическими устройствами ограничения зон осей. Регулируемые устройства ограничения зон осей ограничивают рабочую зону до
необходимого минимума. Тем самым обеспечивается более надежная
защита персонала и установки.
При работе с манипуляторами, на которых не предусмотрены механические устройства ограничения осей, рабочую зону необходимо организовать так, чтобы даже без данных устройств не возникало опасности
травм персонала и нанесения материального ущерба.
Если это невозможно, рабочую зону необходимо ограничить световыми
барьерами, световыми завесами или заграждениями со стороны установки. В зонах вставки и передачи не должно быть мест среза и защемления.
Данная опция доступна не для всех моделей роботов. Информацию о конкретных моделях роботов можно запросить в компании
KUKA Roboter GmbH.
3.6.5
Устройство контроля зоны оси (опция)
Некоторые манипуляторы в основных осях А1 - А3 могут быть оснащены
двухканальными устройствами контроля зон осей. Оси позиционирования могут быть оснащены дополнительными системами контроля зон
осей. С помощью устройства контроля зоны оси можно установить и
взять под контроль безопасную зону для конкретной оси. Тем самым
обеспечивается более надежная защита персонала и установки.
Данная опция доступна не для всех моделей роботов. Информацию о конкретных моделях роботов можно запросить в компании
KUKA Roboter GmbH.
3.6.6
Возможности перемещения манипулятора без приводной энергии
Пользователь установки должен позаботиться о том, чтобы обучение персонала действиям в аварийных случаях и исключительных ситуациях включало в себя инструктаж о перемещении
манипулятора без приводной энергии.
30 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
3 Безопасность
Описание
Для того чтобы после аварийной ситуации или поломки переместить ма
нипулятор без приводной энергии, можно воспользоваться следующими
приспособлениями/возможностями:
Устройство свободного вращения (опция)
Устройство свободного вращения также может быть использовано
для приводных двигателей основной оси и для приводных двигателей оси руки в зависимости от исполнения робота.
Устройство размыкания тормозов (опция)
Устройство размыкания тормозов предусмотрено для моделей робо
тов, к двигателям которых отсутствует свободный доступ.
Перемещение осей руки вручную
Оси руки моделей роботов с низкой грузоподъемностью не оснащены
устройством свободного вращения. В использовании данного устройства нет необходимости, так как оси руки можно перемещать
вручную.
Информацию о том, какие возможности предлагаются для конкретных моделей роботов и как они используются, можно найти в
инструкции по монтажу или в инструкции по эксплуатации соответствующего робота или запросить в компании KUKA Roboter GmbH.
При перемещении манипулятора без приводной
энергии существует риск повреждения тормоза
двигателей соответствующих осей. При повреждении тормоза соответствующий двигатель необходимо заменить. Поэтому перемещать
манипулятор без приводной энергии разрешается только в аварийных
случаях, например, для освобождения людей.
3.6.7
Маркировки на промышленном роботе
Все таблички, указания, символы и маркировки являются важной для безопасности частью промышленного робота. Их изменение или удаление
запрещено.
На промышленном роботе присутствуют следующие маркировки:
фирменные таблички;
предупреждающие указания;
символы техники безопасности;
маркировочные таблички;
маркировки проводов;
заводские таблички.
Дополнительные сведения приведены в технических характерис
тиках инструкций по эксплуатации или монтажу компонентов
промышленного робота.
3.6.8
Внешние защитные приспособления
Доступ людей к опасным зонам промышленного робота необходимо ограничить защитными приспособлениями. Об этом должен позаботиться
системный интегратор.
Заграждающие защитные приспособления должны отвечать следующим
требованиям:
они соответствуют требованиям стандарта EN 953;
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
31 / 277
KUKA System Software 8.3
они предотвращают доступ персонала к опасным зонам, и их невозможно легко преодолеть;
они в достаточной мере закреплены и выдерживают предвиденное
влияние окружающей среды и рабочее усилие;
они сами не представляют опасности и не могут стать причиной опасности;
соблюдается предписанное минимальное расстояние до опасной зоны.
Защитные двери (двери техобслуживания) должны отвечать следующим
требованиям:
их количество ограничено необходимым минимумом;
блокировка (например, выключатель защитной двери) соединена с
вводом системы защиты оператора посредством коммутационных
устройств защитных дверей или программируемых логических контроллеров безопасности (PLC);
коммутационные устройства, переключатели и тип коммутационной
схемы соответствуют уровню производительности d и категории 3 согласно EN 13849-1;
в зависимости от положения опасности: защитная дверь дополнительно оснащена фиксатором, который допускает ее открытие только после остановки манипулятора;
кнопка для квитирования защитной двери расположена вне зоны,
огороженной защитными приспособлениями.
Дополнительные сведения приведены в соответствующих нор
мативах и предписаниях, к которым относится также EN 953.
Прочие
защитные
приспособления
3.7
Прочие защитные приспособления должны быть интегрированы в установку согласно соответствующим нормам и предписаниям.
Обзор режимов работы и защитных функций
В приведенной ниже таблице указано, в каком режиме работы применяются защитные функции.
Защитные функции
T1
T2
AUT
AUT EXT
-
-
Активир.
Активир.
Устройство АВАРИЙНОГО
ОСТАНОВА
Активир.
Активир.
Активир.
Активир.
Устройство подтверждения
Активир.
Активир.
-
-
Пониженная скорость при
верификации программы
Активир.
-
-
-
Пошаговый режим
Активир.
Активир.
-
-
Программируемые концевые выключатели
Активир.
Активир.
Активир.
Активир.
Система защиты оператора
32 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
3 Безопасность
3.8
Меры безопасности
3.8.1
Общие меры безопасности
Использование промышленного робота допускается только в безупреч
ном техническом состоянии, а также согласно назначению и с учетом
предписаний по технике безопасности. Ошибочные действия могут привести к травмам персонала и материальному ущербу.
Даже при выключенной и заблокированной системе управления роботом
необходимо учитывать возможность перемещения промышленного ро
бота. Из-за неправильного монтажа (например, перегрузки) или механических дефектов (например, дефекта тормоза) манипулятор или дополнительные оси могут осесть. Перед проведением работ на выключенном
промышленном роботе следует перевести манипулятор и дополнительные оси в такое положение, при котором они не смогут произвольно перемещаться как с полезной нагрузкой, так и без нее. Если это
невозможно, манипулятор и дополнительные оси следует надлежащим
образом зафиксировать.
Без функционирующих предохранительных уст
ройств и защитных приспособлений промышлен
ный робот может стать причиной травм и материального ущерба. Если
предохранительные устройства и защитные приспособления дезакти
вированы или демонтированы, эксплуатация промышленного робота
запрещена.
Нахождение под механическими частями робота
может привести к смертельному исходу или трав
мам. Поэтому стоять под механическими частями робота запрещено!
Во время эксплуатации двигатели достигают вы
соких температур, в связи с чем возникает опасность получения ожогов кожи. Не касаться двигателей! Принять соответствующие меры безопасности, например, надеть защитные
перчатки.
smartPAD
Пользователь должен организовать работу так, чтобы управление промышленным роботом посредством smartPAD осуществлялось только
уполномоченным персоналом.
В случае применения нескольких smartPAD на одной установке необходимо проконтролировать, чтобы каждое устройство управления было однозначно присвоено соответствующему промышленному роботу.
Путаница здесь недопустима.
Пользователь должен позаботиться о том, чтобы
отсоединенные пульты управления smartPAD
были незамедлительно удалены из установки и уложены на хранение
вне поля зрения и досягаемости персонала, обслуживающего промышленный робот. Это необходимо для того, чтобы не перепутать действующие и недействующие устройства аварийного останова.
Несоблюдение данного предупреждения может привести к гибели лю
дей, тяжелым травмам или значительному материальному ущербу.
Изменения
После внесения изменений в промышленный робот необходимо проверить, гарантирован ли нужный уровень безопасности. При такой проверке необходимо соблюдать действующие государственные и
региональные инструкции по технике безопасности. Дополнительно не-
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
33 / 277
KUKA System Software 8.3
обходимо проверить надежность функционирования всех функций защиты.
Новые или измененные программы следует сначала проверить в режиме
работы «Вручную, пониженная скорость» (T1).
После внесения изменений в промышленный робот существующие про
граммы сначала должны быть испытаны в режиме работы «Вручную, пониженная скорость» (T1). Это касается всех компонентов промышленного робота и включает также изменения в программном обеспечении и
настройках конфигурации.
Неисправности
3.8.2
В случае неисправности на промышленном роботе действовать следую
щим образом:
выключить систему управления роботом и предохранить ее от несанкционированного включения (например, с помощью висячего замка);
обозначить неисправность табличкой с соответствующим указанием;
запротоколировать неисправности;
устранить неисправность и проверить правильность функционирования.
Транспортировка
Манипулятор
Необходимо соблюдать предписанное транспортировочное положение
манипулятора. Транспортировка должна осуществляться в соответствии
с указаниями, содержащимися в инструкции по эксплуатации или монтажу манипулятора.
Во избежание повреждения механики робота при транспортировке необходимо предотвращать сотрясения и удары.
Система управления роботом
Необходимо соблюдать предписанное транспортировочное положение
системы управления роботом. Транспортировка должна осуществляться
в соответствии с указаниями, содержащимися в Инструкции по эксплуатации или монтажу системы управления роботом.
Во избежание повреждения системы управления роботом при транспортировке следует предотвращать сотрясения и удары.
Дополнительная ось
(опция)
3.8.3
Необходимо соблюдать предписанное транспортировочное положение
дополнительной оси (например, линейный блок KUKA, поворотный откидной стол, устройство позиционирования). Транспортировка должна
осуществляться в соответствии с указаниями, содержащимися в Инструкции по эксплуатации или монтажу дополнительной оси.
Первый и повторный ввод в эксплуатацию
Перед первым вводом установок и приборов в эксплуатацию необходимо выполнить проверку, посредством которой гарантируется монтаж установок и приборов в полном объеме, их правильное функционирование,
надежная эксплуатация, а также распознавание неисправностей.
При такой проверке необходимо соблюдать действующие государственные и региональные инструкции по технике безопасности. Дополнительно необходимо проверить надежность функционирования всех функций
защиты.
Перед вводом в эксплуатацию необходимо изменить пароли в
системном программном обеспечении KUKA, присваиваемые
группам пользователей. Новые пароли можно передавать только уполномоченному персоналу.
34 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
3 Безопасность
Система управления роботом предварительно
сконфигурирована для соответствующего промышленного робота. При неправильном соединении кабелей манипулятор и дополнительные оси (опция) могут получать неправильные
данные, что может привести к травмам или материальному ущербу.
Если установка состоит из нескольких манипуляторов, соединительные
кабели всегда следует подключать к манипулятору и соответствующей
ему системе управления роботом.
Если в состав промышленного робота включены дополнитель
ные компоненты (например, провода), не входящие в комплект
поставки компании KUKA Roboter GmbH, пользователь несет ответственность за то, чтобы эти компоненты не снизили эффективность
предохранительных устройств и не вывели их из строя.
Если температура внутри шкафа системы управ
ления роботом значительно отличается от температуры окружающей среды, то в шкафу может скопиться конденсат,
что может привести к повреждению электрооборудования. Систему управления роботом разрешается вводить в эксплуатацию только в том
случае, если внутренняя температура шкафа адаптирована к температуре окружающей среды.
Проверка
функционирования
Перед первым и повторным вводом в эксплуатацию следует выполнить
нижеуказанные проверки.
Общая проверка
Необходимо обеспечить следующее:
промышленный робот правильно установлен и закреплен в соответствии с указаниями в документации;
на промышленном роботе нет посторонних предметов или дефектных, незатянутых или незакрепленных деталей;
все необходимые защитные приспособления установлены надлежащим образом и исправно функционируют;
потребляемая мощность промышленного робота соответствует местному сетевому напряжению и конфигурации сети;
защитный провод и кабель выравнивания потенциалов имеют достаточные параметры и правильно соединены;
соединительные кабели правильно подключены, а штекеры – зафиксированы.
Проверка предохранительных устройств
Посредством проверки функционирования необходимо убедиться в исправном функционировании следующих предохранительных устройств:
локальное устройство аварийного останова;
внешнее устройство аварийного останова (вход и выход);
устройство подтверждения (в тестовых режимах работы);
система защиты оператора;
все остальные используемые входы и выходы, связанные с безопасностью;
другие внешние предохранительные устройства.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
35 / 277
KUKA System Software 8.3
3.8.3.1
Проверка технических данных и конфигурации системы безопасности
Если загружены неверные технические данные
или неверная конфигурация системы управления, перемещения промышленного робота запрещены! Иначе может
наступить смертельный исход, могут быть нанесены тяжелые травмы
или может возникнуть значительный материальный ущерб. Должны
быть загружены правильные данные.
Необходимо проконтролировать, чтобы на заводской табличке системы управления роботом были указаны те же технические данные, что
и в декларации изготовителя. Технические данные на заводской табличке манипулятора и дополнительных осей (опция) следует загрузить при вводе в эксплуатацию.
В рамках ввода в эксплуатацию необходимо протестировать технические данные на практике.
После внесения изменений в технические данные следует проверить
конфигурацию безопасности.
После активации проекта WorkVisual в системе управления робота
там следует проверить конфигурацию системы безопасности!
В случае перенятия технических данных при проверке конфигурации
системы безопасности (вне зависимости от причины, по которой проводилась проверка конфигурации системы безопасности) необходимо протестировать технические данные на практике.
Системное программное обеспечение 8.3 и выше: Если контрольная
сумма конфигурации системы безопасности изменилась, необходимо проверить надежность контрольных функций осей.
Информация по проверке конфигурации системы безопасности
и надежности контрольных функций осей приведена в инструкции по эксплуатации и программированию системных интеграто-
ров.
При отсутствии успешных результатов тестирования в рамках первого
ввода в эксплуатацию следует связаться с компанией KUKA Roboter
GmbH.
При отсутствии успешных результатов тестирования в рамках выполне
ния другой операции необходимо проверить и исправить технические
данные и конфигурацию системы управления, имеющую существенное
значение в обеспечении безопасности.
Общее тестирование
Данное тестирование следует всегда проводить в случае необходимости
тестирования технических данных.
Существуют следующие способы проведения общего тестирования.
Калибровка ТСР по методу «XYZ, 4 точки».
Тестирование успешно проведено при получении успешных результатов калибровки TCP.
или:
1. Установить TCP в самостоятельно выбранную точку.
Выбранная точка считается исходной точкой. Она должна быть расположена таким образом, чтобы была обеспечена возможность переориентации.
2. Вручную переместить TCP, по меньшей мере, на 45° в направлении
A, затем в направлении B и C.
36 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
3 Безопасность
Перемещения не должны суммироваться , т. е. после перемещения в
одном направлении необходимо вернуться в исходную точку и лишь
затем можно выполнять перемещение в другом направлении.
Тестирование успешно проведено, если общее отклонение TCP от
исходной точки составляет не более 2 см.
Тестирование
математически
несоединенных
осей
Данное тестирование следует проводить в случае необходимости тести
рования технических данных при наличии математически несоединен
ных осей.
1. Отметить исходную позицию математически несоединенной оси.
2. Вручную переместить ось на самостоятельно выбранное расстояние.
Установить расстояние перемещения по индикации на smartHMI Актуальная позиция.
Переместить линейные оси на определенное расстояние.
Переместить оси вращения на определенный угол.
3. Сравнить пройденное расстояние с расстоянием согласно smartHMI.
Тестирование успешно проведено, если разница значений составляет не более 10 %.
4. Повторить тестирование для каждой математически несоединенной
оси.
Тестирование
соединяемых
осей
Данное тестирование следует проводить в случае необходимости тести
рования технических данных при наличии физически соединяемых/отсоединяемых осей (например, сервозахват).
1. Физически отсоединить соединяемые оси.
2. Выполнить перемещение всех оставшихся осей по отдельности.
Тестирование успешно проведено, если возможно перемещение
всех оставшихся осей.
3.8.3.2
Режим ввода в эксплуатацию
Описание
Промышленный робот можно переключить в режим ввода в эксплуатацию с помощью пользовательского интерфейса smartHMI. В этом режиме можно перемещать манипулятор в режиме работы T1 при
бездействии внешних защитных приспособлений.
Доступность режима ввода в эксплуатацию зависит от используемого
предохранительного интерфейса.
Дискретный предохранительный интерфейс
Системное программное обеспечение 8.2 и предыдущие версии:
переключение в режим ввода в эксплуатацию возможен только в том
случае, если все входные сигналы в дискретном предохранительном
интерфейсе находятся в состоянии «логический ноль». Если это условие не выполняется, система управления роботом блокирует или
завершает режим ввода в эксплуатацию.
При использовании дополнительного дискретного предохранительного интерфейса для опций безопасности все его входные сигналы
также должны находится в состоянии «логический ноль».
Системное программное обеспечение 8.3 и новейшие версии:
режим ввода в эксплуатацию доступен постоянно. Это означает, что
он не зависит от состояния входных сигналов в дискретном предохранительном интерфейсе.
В случае использования дополнительного дискретного предохранительного интерфейса для опций безопасности: состояние этих входных сигналов также не имеет значения.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
37 / 277
KUKA System Software 8.3
Предохранительный интерфейс Ethernet
При наличии или установке соединения с вышестоящей системой безо
пасности система управления роботом предотвращает или завершает
работу в режиме ввода в эксплуатацию.
Последствие
При активации режима ввода в эксплуатацию все выходы автоматически
переключаются в состояние «логический ноль».
Если система управления роботом оборудована периферийным контак
тором (US2) и в конфигурации системы безопасности задано, что он
включается в зависимости от разрешения на перемещение, то эти настройки остаются действительными также в режиме ввода в эксплуата
цию. Это значит, что при наличии разрешения на перемещение включается напряжение US2 (также в режиме ввода в эксплуатацию).
Опасности
Возможные опасности и риски при использовании режима ввода в экс
плуатацию:
Люди могут попасть в опасную зону манипулятора.
В случае опасности может быть задействовано неактивное внешнее
устройство АВАРИЙНОГО ОСТАНОВА; в этом случае манипулятор
не будет отключен.
Дополнительные меры предосторожности для снижения риска в режиме
ввода в эксплуатацию:
Использование
Закрыть бездействующие устройства АВАРИЙНОГО ОСТАНОВА или
обозначить их соответствующими предупреждающими знаками.
При отсутствии защитного ограждения следует принять другие меры,
чтобы не допустить нахождения людей в опасной зоне манипулятора
(например, с помощью ограничительной ленты).
Правила надлежащего использования режима ввода в эксплуатацию:
Разрешается использовать для ввода в эксплуатацию в режиме работы T1, если внешние защитные приспособления еще не установлены или не введены в эксплуатацию. При этом опасная зона должна
быть обозначена с помощью ограничительной ленты.
Разрешается использовать для определения места неисправности
(ошибок периферийного оборудования).
Использование режима ввода в эксплуатацию необходимо сократить
до минимально возможного.
При использовании режима ввода в эксплуатацию отключаются все внешние защитные приспособления. Обслуживающий персонал должен позаботиться о том,
чтобы в то время, пока защитные приспособления отключены, никто не
находился вблизи опасной зоны и в опасной зоне манипулятора.
Несоблюдение данного предупреждения может привести к гибели лю
дей, травмам или материальному ущербу.
Использование
не по назна
чению
3.8.4
Любое использование, отличающееся от использования по назначению,
рассматривается как неправильное и не допускается. За повреждения,
возникающие вследствие неправильного использования, фирма KUKA
Roboter GmbH ответственности не несет. В этом случае всю ответственность несет эксплуатирующая сторона.
Ручной режим
Ручной режим является режимом для проведения работ по наладке. Работы по наладке – это все работы, которые должны быть проведены на
38 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
3 Безопасность
промышленном роботе, чтобы обеспечить возможность его эксплуатации в автоматическом режиме. К работам по наладке относятся:
пошаговый режим;
обучение;
программирование;
верификация программы.
Работая в ручном режиме, необходимо учитывать следующие положения:
новые или измененные программы следует сначала проверить в режиме работы «Вручную, пониженная скорость» (T1);
инструменты, манипулятор или дополнительные оси (опция) ни в
коем случае не должны соприкасаться с защитным ограждением или
выходить за его пределы;
перемещения промышленного робота не должны приводить к заклиниванию, коротким замыканиям или падению заготовок, инструментов и иных предметов;
все работы по наладке необходимо по возможности выполнять за
пределами пространства, ограниченного защитными приспособлениями.
Если работы по наладке требуется выполнить внутри пространства, ограниченного защитными приспособлениями, необходимо учитывать нижеприведенную информацию.
Режим работы Вручную, пониженная скорость (T1):
Внутри пространства, ограниченного защитными приспособлениями,
по возможности должны отсутствовать люди.
Если все же необходимо, чтобы внутри пространства, ограниченного
защитными приспособлениями, находилось несколько человек, учитывать следующие положения:
в распоряжении каждого человека должно быть устройство подтверждения;
всем людям необходимо обеспечить беспрепятственный обзор
промышленного робота;
все люди должны постоянно поддерживать между собой визуальный контакт.
Оператор должен занять положение, которое позволяет просматривать опасную зону и тем самым предотвратить опасность.
Режим работы Вручную, высокая скорость (T2):
3.8.5
Данный режим работы разрешается использовать только в случае,
если это требуется для проведения проверки с большей скоростью,
чем в режиме «Вручную, пониженная скорость».
Обучение и программирование в данном режиме запрещены.
Перед началом проверки оператор должен убедиться, что устройства подтверждения функционируют.
Оператор должен занять положение вне опасной зоны.
Внутри пространства, ограниченного защитными приспособлениями,
должны отсутствовать люди. Об этом должен позаботиться оператор.
Моделирование
Программы для моделирования не соответствуют реальности в точности. Робототехнические программы, созданные в программах для моде-
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
39 / 277
KUKA System Software 8.3
лирования, должны быть испытаны на установке в режиме "Вручную,
пониженная скорость" (T1). При необходимости, программа должна
быть изменена.
3.8.6
Автоматический режим работы
Работа в автоматическом режиме допускается только в том случае, если
были соблюдены следующие меры безопасности:
все предохранительные устройства и защитные приспособления
имеются в наличии и функционируют;
в установке нет людей;
соблюдаются предписанные рабочие процессы.
Если манипулятор или дополнительная ось (опция) остановились без видимой причины, заходить в опасную зону разрешается только после применения функции аварийного останова.
3.8.7
Техобслуживание и ремонт
После проведения работ по обслуживанию и ремонту необходимо прове
рить наличие требуемого уровня безопасности. При такой проверке необходимо соблюдать действующие государственные и региональные
инструкции по технике безопасности. Дополнительно необходимо проверить надежность функционирования всех функций защиты.
Техобслуживание и ремонт должны обеспечивать работоспособное со
стояние установки или восстановление работоспособности установки
после отказа. Ремонт включает в себя поиск неисправности и ее устранение.
Меры безопасности при работе с промышленными роботами следую
щие:
40 / 277
Все операции выполнять за пределами опасной зоны. Если необходимо выполнить операции внутри опасной зоны, пользователь должен принять дополнительные меры безопасности для обеспечения
надежной защиты персонала;
Выключить систему управления промышленным роботом и защитить
ее от повторного включения (например, с помощью висячего замка).
Если необходимо выполнить операции при включенной системе уп
равления роботом, пользователь должен принять дополнительные
меры безопасности для обеспечения надежной защиты персонала;
Если необходимо выполнить операции при включенной системе управления роботом, их следует проводить только в режиме работы Т1;
При проведении таких операций необходимо установить на установке соответствующую табличку. Данная табличка должна сохраняться
также и при периодическом прерывании выполнения таких операций.
Устройства аварийного останова должны оставаться активными.
Если при проведении работ по техническому обслуживанию и ремон
ту предохранительные устройства или защитные приспособления
дезактивируются, то сразу после прекращения работ их следует незамедлительно вновь активировать.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
3 Безопасность
Перед началом проведения работ на токоведу
щих деталях робототехнической системы необхо
димо выключить главный выключатель и предохранить его от повторного включения. Затем необходимо убедиться в отсутствии напряжения.
Перед началом проведения работ на токоведущих деталях недостаточ
но лишь задействовать АВАРИЙНЫЙ или предохранительный ОСТА
НОВ либо выключить приводы, поскольку робототехнические системы
остаются при этом подключенными к сети. Детали остаются под напряжением. Существует опасность получения смертельных или тяжелых
травм.
Дефектные компоненты должны быть заменены новыми компонентами с
аналогичным артикульным номером либо компонентами, признанными
фирмой KUKA Roboter GmbH равноценными.
Работы по очистке и уходу следует выполнять в соответствии с инструк
цией по эксплуатации.
Система управ
ления роботом
Даже при отключенной системе управления роботом подключенные к пе
риферийным приборам детали могут находиться под напряжением. Поэтому при проведении работ в системе управления роботом внешние источники питания должны быть отключены.
При выполнении операций на компонентах системы управления роботом
необходимо соблюдать предписания EGB.
После выключения системы управления роботом на различных компонентах в течение нескольких минут может сохраняться напряжение свыше
50 В (до 780 В). Во избежание тяжелых травм в течение этого времени
выполнять какие-либо операции на промышленном роботе запрещено.
Необходимо предотвратить попадание воды и пыли в систему управле
ния роботом.
Компенсатор
веса
Некоторые варианты исполнения роботов оснащены гидропневматичес
ким, пружинным компенсатором веса или компенсатором веса с газовым
цилиндром.
Гидропневматический компенсатор веса и компенсатор веса с газовым
цилиндром являются оборудованием, работающим под давлением. Они
относятся к установкам, подлежащим обязательному контролю, и находятся в соответствии с директивой об оборудовании, работающем под
давлением.
Пользователь должен соблюдать национальные законы, предписания и
стандарты для оборудования, работающего под давлением.
Сроки проверки в Германии определяются в соответствии с §14 и §15 Положения об эксплуатационной безопасности. Испытание по месту монтажа перед вводом оборудования в эксплуатацию проводится
пользователем.
При работе с системами компенсации веса соблюдать следующие меры
безопасности:
Опасные
вещества
узлы манипуляторов, которые поддерживаются системами компенсации веса, должны быть зафиксированы;
работы с системами компенсации веса должны проводиться только
квалифицированным персоналом.
При работе с опасными веществами соблюдать следующие меры предо
сторожности:
Избегать продолжительного и повторного контакта опасных веществ
с кожей.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
41 / 277
KUKA System Software 8.3
Избегать вдыхания масляного тумана и паров.
Обеспечить надлежащее очищение кожи и уход за кожей.
Для оптимального использования нашей продукции мы рекомен
дуем нашим заказчикам запрашивать у изготовителей опасных
веществ паспорта безопасности веществ.
3.8.8
Вывод из эксплуатации, хранение и утилизация
Вывод из эксплуатации, хранение и утилизация промышленного робота
должны осуществляться в строгом соответствии с действующими государственными законами, предписаниями и нормативами.
3.8.9
Меры безопасности для Single Point of Control
Обзор
При использовании определенных компонентов на промышленном робо
те необходимо принять соответствующие меры безопасности, чтобы
полностью реализовать принцип одной точки управления «Single Point of
Control» (SPOC).
Соответствующими компонентами являются:
интерпретатор заданий;
ПЛК;
сервер OPC;
элементы дистанционного управления;
средства конфигурации систем шин с интерактивными функциями;
интерфейс KUKA.RobotSensorInterface.
Могут потребоваться дополнительные меры безопасности. Необходимость таких мер определяется в зависимости от условий
применения, и их проведение входит в обязанности системного
интегратора, программиста или пользователя установки.
Безопасные состояния исполнительных элементов на периферийном
оборудовании системы управления роботом известны только системно
му интегратору, поэтому в его обязанности входит перевод исполнительных элементов в безопасное состояние, например, при АВАРИЙНОМ
ОСТАНОВЕ.
T1, T2
Интерпретатор
заданий, ПЛК
В режимах работы T1 и T2 вышеперечисленные компоненты разрешается использовать на промышленном роботе, только если следующие сигналы находятся в данных состояниях:
Сигнал
Состояние, необходимое для
SPOC
$USER_SAF
TRUE
$SPOC_MOTION_ENABLE
TRUE
Если при использовании интерпретатора заданий или ПЛК посредством
системы входов/выходов выполняется управление движениями (например, приводами или захватами), которые не защищены иначе, то такое
управление действительно также в режимах работы T1 и T2 или во время
выполненного аварийного останова.
Если с помощью интерпретатора заданий или ПЛК изменяются перемен
ные, которые влияют на движение робота (например, коррекция), то это
действительно также в режимах работы Т1 и Т2 или во время выполненного аварийного останова.
42 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
3 Безопасность
Меры безопасности:
В режимах работы T1 и T2 не разрешается запись системной переменной $OV_PRO с помощью интерпретатора заданий или ПЛК.
Запрещается изменять важные для безопасности сигналы и переменные (например, режим работы, АВАРИЙНЫЙ ОСТАНОВ, контакт
защитной двери) посредством интерпретатора заданий или ПЛК.
Если изменения все же необходимы, то все важные для безопасности сигналы и переменные следует объединить таким образом, чтобы
исключить возможность их перевода в небезопасное состояние пос
редством интерпретатора заданий или ПЛК. Ответственность за соблюдение данного указания несет системный интегратор.
Сервер OPC,
элементы
дистанционного
управления
Применяя данные компоненты, посредством регистрируемого доступа
можно изменить программы, выходы или прочие параметры системы управления роботом, при этом изменения остаются незаметны для другого
использующего установку персонала.
Меры безопасности:
При использовании этих компонентов следует учитывать в оценке рисков
выходы, которые могут представлять опасность. Эти выходы должны
быть организованы таким образом, чтобы их нельзя было использовать
без подтверждения. Например, это можно обеспечить с помощью внешнего устройства подтверждения.
Средства конфи
гурации систем
шины
Если эти компоненты обладают интерактивными функциями, можно незаметно для работающего в установке персонала посредством регистри
руемого доступа изменить программы, выходы и прочие параметры системы управления роботом:
WorkVisual от компании KUKA;
средства других разработчиков.
Меры безопасности:
В тестовых режимах работы запрещается изменять программы, выходы
и прочие компоненты системы управления роботом с помощью данных
компонентов.
3.9
Применяемые стандарты и предписания
Имя
Описание
2006/42/ЕС
Директива по машиностроению:
Издание
2006
Директива 2006/42/ЕС Европейского парламента и Европейского совета от 17 мая 2006 года по машиностроению
и о внесении изменений в Директиву 95/16/ЕС (новая
редакция)
2004/108/ЕС
Директива по электромагнитной совместимости:
2004
Директива 2004/108/ЕС Европейского парламента и Европейского совета от 15 декабря 2004 года о сближении правовых норм государств-членов в отношении
электромагнитной совместимости и об отмене Директивы
89/336/ЕЭС
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
43 / 277
KUKA System Software 8.3
97/23/ЕС
Директива по оборудованию, работающему под давлением:
1997
Директива 97/23/ЕС Европейского парламента и Европейского совета от 29 мая 1997 года о сближении правовых
норм государств-членов в отношении оборудования,
работающего под давлением
(применима только для роботов с гидропневматическим
компенсатором веса)
EN ISO 13850
Обеспечение безопасности машин:
2008
Принципы проектирования системы АВАРИЙНОГО ОСТАНОВА
EN ISO 13849-1
Обеспечение безопасности машин:
2008
Детали систем управления, обеспечивающие безопасность, часть 1: общие принципы проектирования
EN ISO 13849-2
Обеспечение безопасности машин:
2012
Детали систем управления, обеспечивающие безопасность, часть 2: утверждение
EN ISO 12100
Обеспечение безопасности машин:
2010
Общие принципы проектирования, оценка и снижение
риска
EN ISO 10218-1
2011
Промышленные роботы:
Безопасность
Указание: Содержание соответствует стандарту ANSI/RIA
R.15.06-2012, часть 1
EN 614-1
Обеспечение безопасности машин:
2009
Эргономические принципы проектирования, часть 1: понятия и общие положения
EN 61000-6-2
Электромагнитная совместимость (EMV):
2005
Часть 6-2: основные специальные нормы. Помехоустойчивость в промышленной зоне
EN 61000-6-4 + A1
Электромагнитная совместимость (EMV):
2011
Часть 6-4: основные специальные нормы. Эмиссия помех
в промышленной зоне
EN 60204-1 + A1
Обеспечение безопасности машин:
2009
Электрооборудование промышленных машин, часть 1:
Общие требования
44 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
4 Управление
4
У
Управление
4.1
Переносное программирующее устройство KUKA smartPAD
4.1.1
Передняя сторона
4
л
Функция
Пульт smartPAD – переносное программирующее устройство для промышленных роботов. Пульт smartPAD имеет все возможности управления и индикации, необходимые для управления промышленным роботом
и его программирования.
На пульте smartPAD расположен сенсорный экран: интерфейсом
smartHMI можно управлять с помощью пальца или стилуса. Внешняя
мышь или клавиатура не требуется.
Обзор
Рис. 4-1: Передняя сторона пульта управления KUKA smartPAD
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
45 / 277
KUKA System Software 8.3
Поз.
1
Описание
Кнопка для отсоединения пульта управления smartPAD.
(>>> 4.1.3 "Подключение и отключение пульта smartPAD"
Страница 48)
2
Замок-выключатель для вызова менеджера соединений. Переключатель можно установить в другое положение только
при вставленном ключе.
С помощью менеджера соединений можно изменить режим
работы.
(>>> 4.11 "Смена режима работы" Страница 66)
3
Устройство АВАРИЙНОГО ОСТАНОВА. Служит для останова
робота в опасных ситуациях. Устройство АВАРИЙНОГО ОСТАНОВА при нажатии блокируется.
4
Пространственная мышь: Служит для перемещения робота
вручную.
(>>> 4.13 "Перемещение робота вручную" Страница 69)
5
Клавиши перемещения: служат для перемещения робота
вручную.
(>>> 4.13 "Перемещение робота вручную" Страница 69)
6
Кнопка для установки программной коррекции.
7
Кнопка для установки ручной коррекции.
8
Кнопка вызова главного меню: выводит пункты меню на экран
smartHMI.
(>>> 4.4 "Вызов главного меню" Страница 55)
9
Клавиши состояния. Клавиши состояния в основном служат
для настройки параметров из пакетов технологий. Их функция
зависит от установленных пакетов технологий.
10
Клавиша пуска: клавишей пуска запускается программа.
11
Клавиша обратного пуска: Клавишей обратного пуска запускают программу в обратном направлении. Программа обрабатывается поэтапно.
12
Клавиша СТОП: клавиша СТОП останавливает работающую
программу.
13
Клавиша клавиатуры:
Эта клавиша выводит на экран клавиатуру. Обычно клавиатуру не нужно вызывать отдельно: интерфейс smartHMI определяет, когда требуется ввод данных с помощью клавиатуры, и
она автоматически появляется на экране.
(>>> 4.2.1 "Клавиатура" Страница 51)
46 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
4 Управление
4.1.2
Обратная сторона
Обзор
Рис. 4-2: Обратная сторона пульта управления KUKA smartPAD
Описание
1
Переключатель подтверждения
4
Разъем USB
2
Клавиша пуска (зеленая)
5
Переключатель подтверждения
3
Переключатель подтверждения
6
Заводская табличка
Элемент
Описание
Заводская
табличка
Заводская табличка
Клавиша пуска
Клавишей пуска запускают программу.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
47 / 277
KUKA System Software 8.3
Элемент
Описание
Переключатель подтверждения имеет 3 положения:
Переключатель подтверждения
не нажат;
среднее положение;
нажат до отказа.
В режимах T1 и T2 переключатель подтверждения
должен удерживаться в среднем положении, чтобы
манипулятор мог перемещаться.
В обычном автоматическом и внешнем автоматическом режимах работы переключатель подтверждения не работает.
Разъем USB
4.1.3
Разъем USB можно использовать для резервного
копирования и восстановления информации.
Он предназначен только для USB-накопителей с
файловой системой FAT32.
Подключение и отключение пульта smartPAD
Описание
Пульт smartPAD можно отключить при работающей системе управления
роботом.
Если пульт управления smartPAD отсоединен, установку невозможно отключить посредством уст
ройства АВАРИЙНОГО ОСТАНОВА на пульте smartPAD. Поэтому следует подключить внешнее устройство АВАРИЙНОГО ОСТАНОВА к системе управления роботом.
Пользователь должен позаботиться о том, чтобы отсоединенный пульт
управления smartPAD сразу же был удален с установки и помещен на
хранение вне поля зрения и досягаемости персонала, обслуживающего
промышленного робота. Это необходимо для того, чтобы не перепутать
действующие и недействующие устройства АВАРИЙНОГО ОСТАНОВА.
Несоблюдение данных мер может привести к гибели людей, травмам
или материальному ущербу.
Порядок
действий
Отсоединение
1. Для отсоединения нажать кнопку на пульте smartPAD.
В интерфейсе smartHMI появится сообщение и счетчик. Счетчик запустится на 30 с. В течение этого времени можно отключить пульт
smartPAD от системы управления роботом.
При отключении пульта smartPAD без запуска счетчика срабатывает аварийный останов. Аварийный останов можно отменить
только с помощью подключения пульта smartPAD.
2. Отсоединить пульт smartPAD от системы управления роботом.
По истечении времени счетчика в том случае, если пульт не был отключен, ничего не произойдет. Можно нажимать кнопку для отсоединения как угодно часто, чтобы снова вывести на экран счетчик.
Подсоединение
Подсоединить пульт smartPAD к системе управления роботом.
Пульт smartPAD можно подсоединить в любой момент. Условие: модель
пульта smartPAD должна совпадать с отсоединенным устройством. Через 30 с после подсоединения пульта кнопка аварийного останова и переключатель подтверждения восстановят свою работоспособность. На
48 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
4 Управление
экране автоматически появится интерфейс smartHMI. (Это может занять
больше 30 с).
Подключенный пульт smartPAD примет текущий режим работы системы
управления.
Текущий режим работы не всегда совпадает с режимом перед от
ключением пульта smartPAD: если система управления роботом
относится к шине RoboTeam, то режим работы мог измениться
после отключения пульта (например, с помощью ведущего устройства).
При подключении пульта smartPAD к системе управления роботом пользователь должен оставаться рядом с пультом не менее 30 с, т. е. до восстановления
работоспособности кнопки АВАРИЙНОГО ОСТАНОВА и переключателя подтверждения. Так можно избежать того, что другой пользователь
попытается воспользоваться недействующим АВАРИЙНОГО ОСТАНОВОМ в опасной ситуации.
Несоблюдение данного предупреждения может привести к гибели лю
дей, травмам или материальному ущербу.
4.2
Пользовательский интерфейс KUKA smartHMI
Рис. 4-3: Пользовательский интерфейс KUKA smartHMI
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
49 / 277
KUKA System Software 8.3
Поз.
Описание
1
Линейка состояний (>>> 4.2.2 "Линейка состояний" Страница 51)
2
Счетчик сообщений
Счетчик сообщений показывает количество сообщений всех
типов. Касание счетчика сообщений увеличивает размер индикации.
3
Окно сообщений
По умолчанию показывается только последнее сообщение.
Касание окна сообщений раскрывает его и показывает все
имеющиеся сообщения.
Нажатием на кнопку OK можно квитировать квитируемое сообщение. Нажатием на кнопку Все OK можно сразу квитировать все квитируемые сообщения.
4
Индикация состояния Пространственная мышь
Эта индикация показывает текущую систему координат для
ручного перемещения с помощью пространственной мыши.
Касание этой индикации показывает все системы координат и
позволяет выбрать другую систему координат.
5
Индикация Ориентация пространственной мыши
Касание этой индикации открывает окно, отображающее текущую ориентацию пространственной мыши, которую можно изменить.
(>>> 4.13.8 "Ориентация пространственной мыши" Страница 77)
6
Индикация состояния Клавиши перемещения
Эта индикация показывает текущую систему координат для
ручного перемещения с помощью клавиш перемещения. Касание этой индикации показывает все системы координат и позволяет выбрать другую систему координат.
7
Надписи на клавишах перемещения
Если выбрано осевое перемещение, здесь показываются номера осей (A1, A2 и т. д.). Если выбрано перемещение в прямоугольных координатах, здесь показываются направления
системы координат (X, Y, Z, A, B, C).
Касание надписи показывает выбранную группу кинематики.
8
Коррекция программы
(>>> 7.5 "Установка коррекции программы (POV)" Страница 183)
9
Ручная коррекция
(>>> 4.13.3 "Настройка ручной коррекции (HOV)" Страница 74)
10
Линейка с кнопками. Кнопки изменяются динамично и всегда
относятся к окну, которое в настоящий момент активно в интерфейсе smartHMI.
Совсем справа находится кнопка Правка. С ее помощью можно вызвать различные команды, которые относятся к навигатору.
50 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
4 Управление
Поз.
11
Описание
Символ WorkVisual
При касании символа выполняется переход к окну Управление проектами.
(>>> 6.11.1 "Окно Управление проектами" Страница 175)
12
Часы
Часы показывают системное время. Касание часов показывает системное время в цифровом виде, а также текущую дату.
13
Индикация признаков жизни
Если индикация мигает следующим образом, это свидетельствует о том, что интерфейс smartHMI активен:
левая и правая лампочки попеременно горят зеленым светом.
Переключение лампочек происходит медленно (прибл. через
3 с) и равномерно.
4.2.1
Клавиатура
На пульте smartPAD расположен сенсорный экран: интерфейсом
smartHMI можно управлять с помощью пальца или стилуса.
Для ввода букв и цифр в интерфейсе smartHMI доступна клавиатура. Интерфейс smartHMI определяет, когда требуется ввод данных, и клавиатура автоматически появляется на экране.
На клавиатуре всегда показываются лишь необходимые символы. Например, при изменении поля, в котором можно вводить только цифры, на
экране показываются только цифры, а не буквы.
Рис. 4-4: Пример клавиатуры
4.2.2
Линейка состояний
Линейка состояний показывает состояние основных параметров промышленного робота. В случае с большинством индикаций при касании
открывается окно, в котором можно изменить параметры настройки.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
51 / 277
KUKA System Software 8.3
Обзор
Рис. 4-5: Линейка состояний KUKA smartHMI
Поз.
Описание
1
Кнопка вызова главного меню. Эта кнопка выводит пункты
меню на экран smartHMI.
2
Имя робота. Имя робота можно изменить.
(>>> 4.4 "Вызов главного меню" Страница 55)
(>>> 4.16.12 "Показ/обработка данных робота" Страница 91)
3
При выборе программы здесь показывается это имя.
4
Индикация состояния Интерпретатор заданий
(>>> 4.2.3 "Индикация состояния Интерпретатор заданий"
Страница 53)
5
Индикация состояния Приводы. При касании данной индикации открывается окно, в котором можно включить или выключить приводы.
(>>> 4.2.4 "Индикатор состояния Приводы и окно Условия перемещения" Страница 53)
6
Индикация состояния Интерпретатор робота. Здесь можно
выполнить сброс или отменить выбор программы.
(>>> 7.6 "Индикация состояния интерпретатора робота" Страница 184)
(>>> 6.5.1 "Выбор и отмена программы" Страница 162)
(>>> 7.10 "Сброс программы" Страница 186)
7
Актуальный режим работы
8
Индикация состояния POV/HOV. Показывает актуальные значения коррекции программы и ручной коррекции.
(>>> 4.11 "Смена режима работы" Страница 66)
(>>> 7.5 "Установка коррекции программы (POV)" Страница 183)
(>>> 4.13.3 "Настройка ручной коррекции (HOV)" Страница 74)
9
Индикация состояния Вид выполнения программы. Показывает актуальный вид выполнения программы.
10
Индикация состояния Инструмент/база. Показывает актуальный инструмент и актуальную базу.
(>>> 7.2 "Виды выполнения программы" Страница 179)
(>>> 4.13.4 "Выбор инструмента и базы" Страница 75)
11
Индикация состояния Инкрементальное перемещение
вручную
(>>> 4.13.10 "Инкрементальное перемещение вручную" Страница 79)
52 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
4 Управление
4.2.3
Индикация состояния Интерпретатор заданий
Символ
Цвет
Интерпретатор заданий выбран. Указатель записи стоит в первой строке выбранной программы SUB.
Зеленый
Программа SUB выбрана и выполняется.
Красный
Интерпретатор заданий остановлен.
Серый
4.2.4
Описание
Желтый
Выбор интерпретатора заданий аннулирован.
Индикатор состояния Приводы и окно Условия перемещения
Индикация
состояния
Приводы
Индикация состояния Приводы может сигнализировать следующие состояния:
Состояния
Значение символов и цветов:
Символ: I
Приводы включены.
Промежуточный контур полностью заряжен.
Приводы выключены.
Символ: O
Цвет: зеленый
Цвет: серый
Промежуточный контур не заряжен или заряжен
не полностью.
Переключатель подтверждения нажат (среднее
положение), или его нажатие не требуется.
И: отсутствуют сообщения, которые препятствуют перемещению робота.
Переключатель подтверждения не нажат или
нажат до отказа.
И/или: имеются сообщения, которые препятствуют перемещению робота.
Команда «Приводы ВКЛ.» автоматически не означает, что KSP
начинают регулироваться и подавать к двигателям ток.
Команда «Приводы ВЫКЛ.» автоматически не означает, что
KSP прекращают подачу тока к двигателям.
Подача тока с KSP к двигателям зависит от того, поступает ли с системы управления безопасностью разрешение на деблокировку приводов.
Окно Условия
перемещения
При касании индикации состояния Приводы открывается окно Условия
перемещения. Здесь можно включить и выключить приводы.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
53 / 277
KUKA System Software 8.3
Рис. 4-6: Окно Условия перемещения
Поз.
Описание
1
I: при касании приводы включаются.
2
Зеленый: от системы управления безопасностью получено
разрешение на деблокировку приводов.
O: при касании приводы выключаются.
Серый: система управления безопасностью вызвала безопасный останов 0 или завершила безопасный останов 1. Разрешение на деблокировку приводов отсутствует, т. е. KSP не
регулируются и не подают ток на двигатели.
3
Зеленый: сигнал система защиты оператора; == TRUE
Серый: сигнал система защиты оператора; == FALSE
(>>> "Сигнал система защиты оператора; == TRUE" Страница 54)
4
Зеленый: от системы управления безопасностью поступило
разрешение на перемещение.
Серый: система управления безопасностью вызвала безопасный останов 1 или безопасный останов 2. Разрешение на
перемещение отсутствует.
5
Зеленый: нажат переключатель подтверждения (среднее положение).
Серый: переключатель подтверждения не нажат, нажат до отказа, или его нажатие не требуется.
Сигнал система
защиты
оператора; ==
TRUE
Условия при которых сигнал система защиты оператора; TRUE, зависят от варианта системы управления и режима работы:
Система
управления
Режим работы
Условие
KR C4
T1, T2
Нажата кнопка подтверждения.
AUT, AUT EXT
Защитное ограждение закрыто.
T1
Нажата кнопка подтверждения.
E2 замкнуто.
Нажата кнопка подтверждения.
E2 и E7 замкнуты.
Защитное ограждение закрыто.
E2 и E7 разомкнуты.
VKR C4
T2
AUT EXT
54 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
4 Управление
4.3
Включение системы управления роботом и запуск KSS
Порядок
действий
Установить главный выключатель системы управления роботом в положение ON.
Операционная система и KSS запускаются автоматически.
Если KSS не запускается автоматически, например, если автоматический запуск дезактивирован, то следует запустить программу
StartKRC.exe по пути C:\KRC.
Если система управления роботом зарегистрирована в сети, запуск может продлиться дольше.
4.4
Вызов главного меню
Порядок
действий
Нажать кнопку вызова главного меню на пульте smartPAD. Открывается окно Главное меню.
Окно всегда открывается в таком виде, в каком оно было закрыто в
последний раз.
Описание
Окно свойств Главное меню:
В левом столбце показано главное меню.
Касание пункта меню со стрелкой открывает соответствующее подменю (например, Конфигурация).
В зависимости от количества вложенных подменю возможно, что
столбец Главное меню уже не будет виден, а будут видны только
подменю.
Кнопка со стрелкой в верхней правой части экрана закрывает последнее открытое подменю.
Кнопка «Home» в левой верхней части экрана закрывает все открытые подменю.
В нижней части экрана показываются последние выбранные пункты
меню (макс. 6).
Это позволяет выбирать эти пункты меню напрямую, не закрывая открытые до этого подменю.
Белый крест слева закрывает окно.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
55 / 277
KUKA System Software 8.3
Рис. 4-7: Пример: открыто подменю Конфигурация
4.5
Завершение работы и повторный запуск KSS
Условие
Для определенных опций: выбрана группа пользователей «Эксперты».
Если при завершении работы выбирается опция
Перезапустить ПК системы управления, то не
разрешается задействовать главный выключатель системы управления роботом, пока не завершится повторный запуск. В противном случае возможно повреждение системных файлов.
Если при завершении работы эта опция не была выбрана, можно задействовать главный выключатель после выключения системы управ
ления.
Порядок
действий
1. В главном меню выбрать пункт Выключение.
2. Выбрать нужные опции.
3. Нажать Выключить ПК системы управления или Перезапустить
ПК системы управления.
4. Подтвердить процедуру, ответив Да на контрольный запрос. Программное обеспечение выключается и в зависимости от выбранной
опции запускается повторно.
После повторного запуска появляется следующее сообщение:
56 / 277
Холодный пуск системы управления
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
4 Управление
Или, если было выбрано Повторно считать файлы: Начальный холодный пуск системы управления
Описание
Рис. 4-8: Окно Выключение
Опция
Описание
Стандартные настройки для выключения системы
Эти параметры можно изменить только в группе пользователей «Эксперты».
Холодный пуск
Холодный пуск является стандартным типом пуска. (>>> "Типы
пуска" Страница 59)
Состояние ожидания
Состояние ожидания является стандартным типом пуска.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
57 / 277
KUKA System Software 8.3
Опция
Описание
Время ожидания
перед отключением питания
Если происходит выключение системы управления роботом главным выключателем, то система выключается только по истечении
определенного данным параметром времени ожидания. В течение
времени ожидания питание системы управления роботом обеспечивается собственным аккумулятором.
Время ожидания можно изменить только в группе пользователей
«Эксперты».
Указания
Время ожидания перед отключением питания применяется
только в случае, если питание отключается главным выключателем. В случае сбоя подачи напряжения применяется время ожидания при сбое подачи напряжения.
Исключением является «KR C4 compact»: В этом варианте системы управления время ожидания перед отключением питания
не применяется! В этом случае также при отключении питания
главным выключателем применяется время ожидания при сбое
подачи напряжения.
(>>> 4.5.1 "Выключение после сбоя подачи напряжения" Страница 59)
Настройки, которые будут действительны только при следующем выключении
Инициировать
холодный пуск
Активирован: следующий запуск — холодный пуск.
Повторно считать
файлы
Активирован: следующий запуск — первичный холодный пуск.
Доступно только в том случае, если выбрано Состояние ожидания.
Выбирать данную опцию требуется в следующих случаях:
при непосредственном изменении файлов XML, т. е. когда пользователь открыл файл и изменил его
(другие возможные изменения файлов XML, например их изменение в фоновом режиме системой управления роботом, сюда
не относятся);
если после выключения необходима замена компонентов аппаратного обеспечения.
Данную опцию можно выбрать только в группе пользователей «Эксперты». Доступно только в том случае, если выбрано Холодный
пуск или Инициировать холодный пуск.
В зависимости от аппаратного обеспечения первичный холодный
пуск длится на 30–150 сек дольше обычного холодного пуска.
Время ожидания
перед отключением питания
Активирован: время ожидания выдерживается при следующем
выключении.
Дезактивирован: время ожидания игнорируется при следующем
выключении.
Немедленные операции
Доступно только в режимах работы T1 и T2.
Выключить ПК системы управления
58 / 277
Система управления роботом выключается.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
4 Управление
Опция
Описание
Перезапустить ПК
системы управления
Система управления роботом выключается и затем снова запускается в режиме холодного пуска.
Шина привода
Позволяет выключить или включить шину привода.
ВЫКЛ./ВКЛ.
Индикация Состояние шины привода:
Типы пуска
зеленый: шина привода включена;
красный: шина привода выключена;
серый: состояние шины привода неизвестно.
Тип пуска
Описание
Холодный пуск
После холодного пуска система управления роботом выводит на экран навигатор. Ни одна из программ не выбрана. Система управления
инициализируется заново, например, все пользовательские выходы устанавливаются как FALSE.
Указание: при непосредственном изменении файлов XML, т. е. когда пользователь открыл файл и
изменил его, при холодном пуске данные изменения учитываются с помощью функции Повторно
считать файлы. Данный тип холодного пуска называется «Первичный холодный пуск».
При холодном пуске без функции Повторно считать файлы данные изменения не учитываются.
Ожидание
После пуска в режиме ожидания продолжается
выбранная до этого программа робота. Состояние
основной системы – программ, указателя записи,
содержания переменных, выходов – полностью
переустанавливается заново.
Дополнительно все программы, которые были
открыты параллельно с системой управления роботом, открываются снова в том состоянии, в котором
они были перед выключением. Windows также восстанавливается в прежнем состоянии.
4.5.1
Выключение после сбоя подачи напряжения
При сбое подачи напряжения робот останавливается. Однако система
управления роботом выключается не сразу, а только после истечения
времени ожидания после сбоя подачи напряжения. Таким образом, за
счет данного времени ожидания кратковременные перебои подачи напряжения не приводят к отключению системы. После этого необходимо
лишь квитировать сообщения о неисправности, и выполнение программы может продолжаться.
В течение времени ожидания питание системы управления роботом
обеспечивается собственным аккумулятором.
Система управления роботом
Время ожидания
при сбое подачи
напряжения (Powerfail)
Вариант «KR C4 compact»
1 сек
Все остальные варианты KR C4
3 сек
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
59 / 277
KUKA System Software 8.3
Если подача напряжения не возобновляется в течение времени ожидания при сбое подачи напряжения, и система управления роботом выключается, для перезапуска используется стандартный тип пуска,
установленный в окне Выключение.
(>>> 4.5 "Завершение работы и повторный запуск KSS" Страница 56)
Время ожидания при сбое подачи напряжения не применяется,
если питание отключается главным выключателем. В этом случае применяется время ожидания перед отключением питания.
Исключением является «KR C4 compact»: В этом варианте системы
управления также при отключении питания главным выключателем
применяется время ожидания при сбое подачи напряжения.
4.6
Время ожидания при сбое подачи напряжения имеет особенное значение для установок, не обеспеченных надежным сетевым питанием. Может устанавливаться время ожидания до 240 сек. При
необходимости изменения установленного времени следует связаться с компанией KUKA Roboter GmbH.
Включение/выключение приводов
Порядок
действий
1. На линейке состояний коснуться индикации Приводы. Открывается
окно Условия перемещения.
2. Включить или выключить приводы.
4.7
Выключение системы управления роботом
Не задействовать главный выключатель, если до этого была завершена работа системы управления роботом с опцией Перезапустить ПК системы управления и перезапуск еще не
завершился. В противном случае возможно повреждение системных
файлов.
Порядок
действий
Установить главный выключатель системы управления роботом на
OFF.
Описание
Робот остается в состоянии останова, и система управления роботом
выключается. Система управления роботом автоматически сохраняет
данные.
При наличии сконфигурированного времени ожидания при отключении
подачи напряжения система управления роботом отключается лишь по
истечении этого времени. За счет этого времени ожидания компенсируются кратковременные отключения подачи напряжения. Затем необходимо квитировать сообщения об ошибках, после чего возможно
продолжение программы.
В течение времени ожидания подача напряжения к системе управления
роботом осуществляется от собственного аккумулятора.
4.8
Установка языка панели управления
Порядок
действий
1. В главном меню выбрать пункт Конфигурация > дополнения >
Язык.
2. Выделить нужный язык. Для подтверждения нажать OK.
Описание
60 / 277
На выбор имеются следующие языки:
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
4 Управление
Китайский (сокращенные знаки)
Польский
Датский
Португальский
Немецкий
Румынский
Английский
Русский
Финский
Шведский
Французский
Словацкий
Греческий
Словенский
Итальянский
Испанский
Японский
Чешский
Корейский
Турецкий
Голландский
Венгерский
4.9
Онлайновая документация и онлайн-справка
4.9.1
Вызов онлайновой документации
Описание
Документацию к системному программному обеспечению KUKA можно
просмотреть в системе управления роботом. Некоторые технологические пакеты тоже снабжены документацией, которую можно просмотреть
в системе управления роботом.
Порядок
действий
1. В главном меню выбрать пункт Помощь > Документация. Потом выбрать Системное ПО или пункт меню для технологического пакета.
Открывается окно KUKA Embedded Information Service. Отображается содержание документации.
2. Коснуться заголовка главы. На экране отображаются составляющие
главу темы.
3. Коснуться темы. На экране отображается описание.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
61 / 277
KUKA System Software 8.3
Пример
Рис. 4-9: Онлайновая документация – пример из системного программного обеспечения KUKA
4.9.2
Поз.
Описание
1, 2
Отображение содержания.
3
Отображение предыдущей темы содержания.
4
Отображение следующей темы.
Вызов онлайн-справки
Описание
Порядок
действий
Онлайн-справка касается сообщений. Существуют следующие возможности для вызова онлайн-справки:
Вызов онлайн-справки к сообщению, которое в актуальный момент
отображается в окне сообщения.
Индикация обзора возможных сообщений и в нем вызов справки к сообщению.
Вызов онлайн-справки к сообщению в окне сообщений
В большинстве сообщений имеется кнопка со знаком вопроса. Для таких
сообщений доступна онлайн-справка.
1. Коснуться кнопки со знаком вопроса. Открывается окно KUKA
Embedded Information Service – страница сообщений.
В данном окне содержится различная информация о сообщении.
(>>> Рис. 4-10 )
2. Часто в окне также приводится информация о причинах появления
сообщения и соответствующих решениях проблемы. О них можно
просмотреть подробную информацию:
62 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
4 Управление
a. Коснуться кнопки с символом лупы, расположенной рядом с индикацией причины. Открывается страница подробной информации.
(>>> Рис. 4-11 )
b. Открыть описания причины и устранения.
c. Если сообщение имеет несколько возможных причин: стрелка на
кнопках с символом лупы позволяет переходить с предыдущей
страницы подробной информации к следующей странице.
Порядок
действий
Индикация обзора сообщений и вызов справки к сообщению
1. В главном меню выбрать пункт Помощь > Сообщения. Потом выбрать Системное ПО или пункт меню для технологического пакета.
Открывается окно KUKA Embedded Information Service – страница
с указателем. Сообщения сортируются по модулям. (Под «модулем»
в данном случае подразумевается подразделение программного
обеспечения.)
2. Коснуться записи. На экране отображаются сообщения данного модуля.
3. Коснуться сообщения. На экране отображается страница сообщений.
В данном окне содержится различная информация о сообщении.
(>>> Рис. 4-10 )
4. Часто в окне также приводится информация о причинах появления
сообщения и соответствующих решениях проблемы. О них можно
просмотреть подробную информацию:
a. Коснуться кнопки с символом лупы, расположенной рядом с индикацией причины. Открывается страница подробной информации.
(>>> Рис. 4-11 )
b. Открыть описания причины и устранения.
c. Если сообщение имеет несколько возможных причин: стрелка на
кнопках с символом лупы позволяет переходить с предыдущей
страницы подробной информации к следующей странице.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
63 / 277
KUKA System Software 8.3
Страница
сообщений
Рис. 4-10: Страница сообщений – пример из системного программного обеспечения KUKA
Поз.
Описание
1
Отображение предыдущей страницы.
2
Данная кнопка активна только тогда, когда был выполнен
переход на предыдущую страницу с помощью другой кнопки
со стрелкой. В этом случае с помощью данной кнопки можно
снова вернуться на первоначальную страницу.
3
Отображение списка программных модулей.
4
Номер и текст сообщения
5
Информация о сообщении
Для сообщения может иметься меньше информации, чем
показано в примере.
6
64 / 277
Отображение подробной информации к данной причине/способу устранения. (>>> Рис. 4-11 )
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
4 Управление
Страница
подробной
информации
Рис. 4-11: Страница подробной информации – пример из системного программного обеспечения KUKA
4.10
Смена группы пользователей
Порядок
действий
1. В главном меню выбрать пункт Конфигурация > Группа пользователей. Появляется актуальная группа пользователей.
2. Для переключения на группу пользователей по умолчанию: нажать
кнопку Стандарт. (Кнопка Стандарт недоступна, если уже установлена группа пользователей по умолчанию).
Для переключения на другую группу пользователей: нажать кнопку
Зарегистрироваться.... Выделить нужную группу пользователей.
3. Если потребуется: ввести пароль и нажать кнопку Зарегистрироваться.
Описание
В KSS в зависимости от группы пользователей в распоряжении имеются
различные функции. Имеются следующие группы пользователей:
«Операторы»;
Группа пользователей для операторов. Это группа пользователей по
умолчанию.
«Пользователи»;
Группа пользователей для операторов. (Группы пользователей
«Операторы» и «Пользователи» предназначены по умолчанию для
одной и той же целевой группы).
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
65 / 277
KUKA System Software 8.3
«Эксперты»;
Группа пользователей для программистов. Эта группа пользователей защищена паролем.
«Специалисты по обслуживанию системы безопасности»;
Группа пользователей для специалистов по вводу в эксплуатацию.
Эти пользователи могут активировать и настраивать конфигурацию
системы безопасности робота.
Эта группа пользователей защищена паролем.
«Специалисты по вводу системы безопасности в эксплуатацию»;
Эта группа пользователей требуется только в том случае, если используются программы KUKA.SafeOperation и
KUKA.SafeRangeMonitoring. Эта группа пользователей защищена паролем.
«Администраторы».
Функции соответствуют группе пользователей «Эксперты». Кроме того, возможна интеграция дополнительных программных модулей в
систему управления роботом.
Эта группа пользователей защищена паролем.
Пароль по умолчанию – «kuka».
При новом запуске по умолчанию выбирается группа «Пользователи».
Если происходит переход в режим работы AUT или AUT EXT, система управления роботом переключается в целях безопасности на группу поль
зователей по умолчанию. Если при этом требуется другая группа пользователей, следует переключиться на нужную группу пользователей.
Если в течение определенного времени на панели управления не произ
водится никаких действий, система управления роботом переключается
в целях безопасности на группу пользователей по умолчанию. Настройка
по умолчанию: 300 с.
4.11
Смена режима работы
Не изменять режим работы во время обработки программы. При
изменении режима работы во время обработки программы про
мышленный робот остановится в режиме безопасного остано
ва 2.
Условие
Порядок
действий
Система управления роботом не обрабатывает какую-либо программу.
Ключ переключателя для вызова менеджера соединений.
1. На пульте smartPAD установить переключатель для вызова менеджера соединений в другое положение. На экране появится менеджер
соединений.
2. Выбрать режим работы (>>> 3.5.3 "Выбор режима работы" Страница 25).
3. Снова установить переключатель для вызова менеджера соединений в исходное положение.
Выбранный режим работы появится в линейке состояний пульта
smartPAD.
66 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
4 Управление
Режим
работы
Использование
Скорости
T1
для режима тестирования, программирования и обучения;
запрограммированная скорость, максимум 250 мм/с
AUT EXT
4.12
Обзор
Верификация программы:
запрограммированная скорость
Для режима тестирования
AUT
ручной режим:
скорость перемещения вручную, максимум 250 мм/с
T2
Верификация программы:
ручной режим: невозможен
Программный режим:
для промышленных
роботов без системы
управления верхнего
уровня;
ручной режим: невозможен
Для промышленных
роботов с системой
управления верхнего
уровня, например,
ПЛК
Программный режим:
запрограммированная скорость
запрограммированная скорость
ручной режим: невозможен
Системы координат
В системе управления роботом заданы следующие декартовы системы
координат:
WORLD;
ROBROOT;
BASE;
TOOL.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
67 / 277
KUKA System Software 8.3
Рис. 4-12: Общий вид систем координат
Описание
WORLD
Система координат WORLD представляет собой жестко заданную декартову систему координат. Она является исходной для систем координат
ROBROOT и BASE.
По умолчанию система координат WORLD расположена в основании робота.
ROBROOT
Декартова система координат ROBROOT всегда расположена в основании робота. Она описывает положение робота по отношению к системе
координат WORLD.
По умолчанию система координат ROBROOT совпадает с системой координат WORLD. Посредством $ROBROOT можно задать смещение робота относительно системы координат WORLD.
BASE
Система координат BASE представляет собой декартову систему координат, описывающую положение заготовки. Она соотнесена с системой
координат WORLD.
По умолчанию система координат BASE совпадает с системой координат WORLD. Она перемещается пользователем в заготовку.
(>>> 5.7.2 "Калибровка базы" Страница 131)
TOOL
Декартова система координат TOOL расположена в рабочей точке инструмента.
По умолчанию исходной точкой системы координат TOOL является
центр фланца. (В этом случае она называется системой координат
FLANGE). Система координат TOOL перемещается пользователем в рабочую точку инструмента.
68 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
4 Управление
(>>> 5.7.1 "Калибровка инструмента" Страница 123)
Угол вращения систем координат робота
4.13
Угол
Вращение вокруг оси
Угол А
Вращение вокруг оси Z
Угол B
Вращение вокруг оси Y
Угол C
Вращение вокруг оси X
Перемещение робота вручную
Описание
Существует 2 вида перемещения робота вручную:
Декартово перемещение
TCP перемещается в положительном или отрицательном направлении вдоль осей системы координат.
Осевое перемещение
Возможно перемещение вдоль каждой оси в положительном и отри
цательном направлении.
Рис. 4-13: Осевое перемещение
Для перемещения робота можно использовать 2 элемента управления:
Клавиши перемещения
Пространственная мышь
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
69 / 277
KUKA System Software 8.3
Обзор
4.13.1
Декартово перемещение
Осевое перемещение
Клавиши
перемещения
(>>> 4.13.6 "Декартово
перемещение с помощью
клавиш" Страница 75)
(>>> 4.13.5 "Осевое перемещение с помощью клавиш" Страница 75)
Пространственная
мышь
(>>> 4.13.9 "Декартово
перемещение с помощью
пространственной мыши"
Страница 78)
Осевое перемещение пространственной мышью
возможно, но не описывается.
Окно Опции ручного метода
Описание
Все параметры для ручного перемещения робота можно установить в
окне Опции ручного метода.
Порядок
действий
Открыть окно Опции ручного метода:
1. Открыть какую-либо индикацию состояния в интерфейсе smartHMI,
например, индикацию POV.
(Невозможно для индикаций состояния Интерпретатор заданий,
Приводы и Интерпретатор робота).
Открывается окно.
2. Нажать кнопку Опции. Открывается окно Опции ручного метода.
Для большинства параметров не требуется специально открывать окно
Опции ручного метода. Их можно установить напрямую через индикации состояния в интерфейсе smartHMI.
4.13.1.1 Вкладка Общая информация
Рис. 4-14: Вкладка Общая информация
Описание
Поз.
1
Описание
Установить коррекцию программы
(>>> 7.5 "Установка коррекции программы (POV)" Страница 183)
70 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
4 Управление
Поз.
2
Описание
Установить ручную коррекцию
(>>> 4.13.3 "Настройка ручной коррекции (HOV)" Страница 74)
3
Выбрать вид выполнения программы
(>>> 7.2 "Виды выполнения программы" Страница 179)
4.13.1.2 Вкладка Кнопки
Рис. 4-15: Вкладка Кнопки
Описание
Поз.
1
Описание
Активировать вид перемещения «Клавиши перемещения»
(>>> 4.13.2 "Активация вида перемещения" Страница 74)
2
Выбрать группу кинематики. Группа кинематики определяет
оси, к которым относятся клавиши перемещения.
Значение по умолчанию: оси робота (= A1 - A6).
В зависимости от конфигурации установки могут быть доступны дополнительные группы кинематики.
(>>> 4.14 "Перемещение дополнительных осей вручную"
Страница 80)
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
71 / 277
KUKA System Software 8.3
Поз.
3
Описание
Выбрать систему координат для перемещения с помощью
клавиш перемещения:
Оси, Универс., База или Инструмент
Флажок Sync.:
4
Без галочки (по умолчанию): Во вкладках Кнопки и Мышь
можно выбирать различные системы координат.
С галочкой: Во вкладках Кнопки и Мышь можно выбрать
только одну и ту же систему координат. При изменении
системы координат в одной из вкладок, то настройка в другой вкладке автоматически адаптируется к этой настройке.
Инкрементальное перемещение вручную
(>>> 4.13.10 "Инкрементальное перемещение вручную" Страница 79)
4.13.1.3 Вкладка Мышь
Рис. 4-16: Вкладка Мышь
Описание
Поз.
Описание
1
Активация вида перемещения «Пространственная мышь»
2
Настройка пространственной мыши
(>>> 4.13.2 "Активация вида перемещения" Страница 74)
(>>> 4.13.7 "Конфигурация пространственной мыши" Страница 76)
3
Выбор системы координат для перемещения с помощью пространственной мыши:
Оси, Универс., База или Инструмент
Флажок Sync.:
72 / 277
Без галочки (по умолчанию): Во вкладках Кнопки и Мышь
можно выбирать различные системы координат.
С галочкой: Во вкладках Кнопки и Мышь можно выбрать
только одну и ту же систему координат. При изменении
системы координат в одной из вкладок, то настройка в другой вкладке автоматически адаптируется к этой настройке.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
4 Управление
4.13.1.4 Вкладка Поз. KCP
Рис. 4-17: Вкладка Поз. KCP
Описание
Поз.
1
Описание
(>>> 4.13.8 "Ориентация пространственной мыши" Страница 77)
4.13.1.5 Вкладка Тек. база/инстр.
Рис. 4-18: Вкладка Тек. база/инстр.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
73 / 277
KUKA System Software 8.3
Описание
Поз.
1
Описание
Здесь показывается текущий инструмент. Также можно выбрать другой инструмент.
(>>> 4.13.4 "Выбор инструмента и базы" Страница 75)
Индикация Неизв. [?] означает, что калибровка инструментов
еще не выполнялась.
2
Здесь показывается текущая база. Также можно выбрать другую базу.
(>>> 4.13.4 "Выбор инструмента и базы" Страница 75)
Индикация Неизв. [?] означает, что калибровка базы еще не
выполнялась.
3
4.13.2
Выбор режима интерполяции:
Фланец: инструмент смонтирован на установочном фланце;
Внешн. инстр.: инструмент является стационарным.
Активация вида перемещения
Порядок
действий
1. Открыть окно Опции ручного метода.
(>>> 4.13.1 "Окно Опции ручного метода" Страница 70)
2. Чтобы активировать вид перемещения «Клавиши перемещения»:
на вкладке Кнопки установить флажок Активировать кнопки.
Чтобы активировать вид перемещения «Пространственная мышь»:
на вкладке Мышь установить флажок Активировать мышь.
Описание
4.13.3
Можно одновременно активировать виды перемещения «Клавиши пере
мещения» и «Пространственная мышь». При перемещении робота с помощью кнопок пространственная мышь блокируется до тех пор, пока робот не остановится. При задействовании пространственной мыши
блокируются кнопки.
Настройка ручной коррекции (HOV)
Описание
Ручная коррекция определяет скорость робота при перемещении вруч
ную. Какую скорость фактически достигает робот при значении ручной
коррекции 100 %, зависит от различных факторов, в том числе, от типа
робота. Тем не менее, скорость не может превышать 250 мм/с.
Порядок
действий
1. Коснуться индикации состояния POV/HOV. Открывается окно Коррекция.
2. Установить нужную ручную коррекцию. Это можно сделать с помощью кнопок «плюс» и «минус» или с помощью регулятора:
кнопки «плюс» и «минус»: значение можно изменить следующими
шагами: 100%, 75%, 50%, 30%, 10%, 3%, 1%;
регулятор: коррекцию можно изменить шагами по 1%.
3. Повторно коснуться индикации состояния POV/HOV. (Или коснуться
области вне пределов окна).
Окно закроется, и выбранная коррекция будет принята.
В окне Коррекция можно открыть окно Опции ручного метода
с помощью пункта Опции.
74 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
4 Управление
Альтерна
тивный порядок
действий
4.13.4
Значение коррекции также можно установить с помощью клавиши
«плюс» и «минус» справа на пульте smartPAD.
Значение можно изменить следующими шагами: 100%, 75%, 50%, 30%,
10%, 3%, 1%.
Выбор инструмента и базы
Описание
В системе управления роботом можно сохранить максимум 16 систем координат TOOL и 32 системы координат BASE. Для прямоугольного перемещения необходимо выбрать инструмент (система координат TOOL) и
базу (система координат BASE).
Порядок
действий
1. Коснуться индикации состояния Инструмент/база. Откроется окно
Тек. база/инстр.
2. Выбрать нужный инструмент и базу.
3. Окно закроется, и выбранные элементы будут приняты.
4.13.5
Осевое перемещение с помощью клавиш
Условие
Порядок
действий
Активирован вид перемещения «Клавиши перемещения».
Выбран режим работы T1.
1. Выбрать в качестве системы координат для клавиш перемещения
Оси.
2. Настроить ручную коррекцию.
3. Нажать и держать нажатым переключатель подтверждения.
Рядом с клавишами перемещения показаны оси от A1 до A6.
4. Нажать клавишу перемещения «плюс» или «минус» для перемещения по оси в положительном или отрицательном направлении.
Может отображаться позиция робота при перемещении: в главном меню выбрать пункт Индикация > Актуальная позиция.
4.13.6
Декартово перемещение с помощью клавиш
Условие
Активирован вид перемещения «Клавиши перемещения».
Выбран режим работы T1.
Выбраны инструмент и база.
(>>> 4.13.4 "Выбор инструмента и базы" Страница 75)
Порядок
действий
1. Выбрать в качестве системы координат для клавиш перемещения
Универсальный, База или Инструмент.
2. Настроить ручную коррекцию.
3. Нажать и держать нажатым переключатель подтверждения.
Помимо клавиш перемещения будут показаны следующие обозначе
ния:
X, Y, Z: для линейных перемещений вдоль осей выбранной системы координат;
A, B, C: для вращений вокруг осей выбранной системы координат.
4. Нажать клавишу перемещения «плюс» или «минус» для перемещения робота в положительном или отрицательном направлении.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
75 / 277
KUKA System Software 8.3
Может отображаться позиция робота при перемещении: в главном меню выбрать пункт Индикация > Актуальная позиция.
4.13.7
Конфигурация пространственной мыши
Порядок
действий
1. Открыть окно Опции ручного метода и выбрать вкладку Мышь.
(>>> 4.13.1 "Окно Опции ручного метода" Страница 70)
2. Группа Настройки мыши:
Флажок Доминирующий режим:
по желанию включить или выключить доминирующий режим.
Поле опций 6D/XYZ/ABC:
выбрать линейное перемещение, вращение или оба вида перемещения TCP.
3. Закрыть окно Опции ручного метода.
Описание
Рис. 4-19: Настройки мыши
Флажок Доминирующий режим:
В зависимости от доминирующего режима с помощью пространственной
мыши можно перемещать только одну или одновременно несколько
осей.
Флажок
Описание
Активирован
Доминирующий режим включен. Перемещается
только ось, в наибольшей степени отклоняемая
пространственной мышью.
Дезактивирован
Доминирующий режим выключен. В зависимости от
выбора оси возможно одновременное перемещение 3 или 6 осей.
Опция
Описание
6D
Робот может перемещаться путем вытягивания,
нажатия, вращения и наклона пространственной
мыши.
При перемещении в декартовой системе координат
возможны следующие движения:
76 / 277
линейные движения в направлении X, Y и Z;
вращение вокруг оси X, Y и Z.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
4 Управление
Опция
Описание
XYZ
Робот может перемещаться только путем вытягивания или нажатия пространственной мыши.
При перемещении в декартовой системе координат
возможны следующие движения:
ABC
линейные движения в направлении X, Y и Z.
Робот может перемещаться только путем вращения
или наклона пространственной мыши.
При перемещении в декартовой системе координат
возможны следующие движения:
вращение вокруг оси X, Y и Z.
Рис. 4-20: Вытягивание и нажатие пространственной мыши
Рис. 4-21: Вращение и наклон пространственной мыши
4.13.8
Ориентация пространственной мыши
Описание
Функцию пространственной мыши можно согласовать с местонахожде
нием оператора, чтобы направление перемещения TCP соответствовало отклонению пространственной мыши.
Местонахождение оператора задается в градусах. Отсчетной точкой для
указания градусов является коробка выводов на станине. Позиция руки
робота или осей значения не имеет.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
77 / 277
KUKA System Software 8.3
Настройка по умолчанию: 0°. Это соответствует оператору, стоящему напротив коробки выводов.
При переключении в режим «Внешняя автоматика» ориентация про
странственной мыши автоматически сбрасывается на 0°.
Рис. 4-22: Пространственная мышь: 0° и 270°
Условие
Порядок
действий
1. Открыть окно Опции перемещения вручную и выбрать вкладку
Поз. KCP.
Выбран режим работы T1.
Рис. 4-23: Ориентация пространственной мыши
2. Переместить smartPAD в положение, соответствующее местонахождению пользователя (шаг регулировки = 45°).
3. Закрыть окно Опции перемещения вручную.
4.13.9
Условие
Декартово перемещение с помощью пространственной мыши
Активирован вид перемещения «Пространственная мышь».
Выбран режим работы T1.
Выбраны инструмент и база.
(>>> 4.13.4 "Выбор инструмента и базы" Страница 75)
Пространственная мышь конфигурирована.
(>>> 4.13.7 "Конфигурация пространственной мыши" Страница 76)
78 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
4 Управление
Ориентация пространственной мыши задана.
(>>> 4.13.8 "Ориентация пространственной мыши" Страница 77)
Порядок
действий
1. Выбрать в качестве системы координат для пространственной мыши
Универсальный, База или Инструмент.
2. Настроить ручную коррекцию.
3. Нажать и держать нажатым переключатель подтверждения.
4. Переместить робот пространственной мышью в нужном направлении.
Может отображаться позиция робота при перемещении: в главном меню выбрать пункт Индикация > Актуальная позиция.
4.13.10 Инкрементальное перемещение вручную
Описание
Инкрементальное перемещение вручную позволяет перемещать робот
на определенное расстояние, например, на 10 мм или 3°. После этого робот самостоятельно останавливается.
Инкрементальное перемещение вручную может быть включено при пе
ремещении клавишами. При перемещении пространственной мышью инкрементальное перемещение вручную невозможно.
Области применения:
Позиционирование точек на равных расстояниях
Отвод из позиции на определенное расстояние, например, в случае
ошибки
Юстировка стрелочным индикатором
В распоряжении имеются следующие опции:
Значение
Описание
Непрерывно
Инкрементальное перемещение вручную отключено.
100 мм/10°
1 инкремент = 100 мм или 10°
10 мм/3°
1 инкремент = 10 мм или 3°
1 мм/1°
1 инкремент = 1 мм или 1°
0,1 мм/0,005°
1 инкремент = 0,1 мм или 0,005°
Инкременты в мм:
при прямоугольном перемещении в направлении X, Y или Z.
Инкременты в градусах:
Условие
Порядок
действий
при прямоугольном перемещении в направлении A, B или C;
при осевом перемещении.
Активирован вид перемещения «Клавиши перемещения».
Выбран режим работы T1.
1. Выбрать инкрементальный размер в линейке состояний.
2. Переместить робот клавишами перемещения. Возможно прямоугольное или осевое перемещение.
После того как заданный инкремент будет достигнут, робот останавливается.
Если прервать движение робота, например, отпустив переключатель
подтверждения, при следующем движении прерванный инкремент не будет продолжен, а начинается новый инкремент.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
79 / 277
KUKA System Software 8.3
4.14
Перемещение дополнительных осей вручную
Перемещать дополнительные оси с помощью пространственной мыши
невозможно. Если выбран вид перемещения «Пространственная мышь»,
то с помощью пространственной мыши можно перемещать только робот.
Дополнительные оси следует перемещать с помощью клавиш переме
щения.
Условие
Порядок
действий
Активирован вид перемещения «Клавиши перемещения».
Выбран режим работы T1.
1. В окне Опции ручного метода во вкладке Кнопки выбрать нужную
группу кинематики, например, Дополнительные оси.
Вид и количество доступных групп кинематики зависят от конфигура
ции установки.
2. Настроить ручную коррекцию.
3. Нажать и держать нажатым переключатель подтверждения.
Рядом с клавишами перемещения отображаются оси выбранной
группы кинематики.
4. Нажать клавишу перемещения «плюс» или «минус» для перемещения по оси в положительном или отрицательном направлении.
Описание
В зависимости от конфигурации установки могут быть доступны следую
щие группы кинематики:
Группа кинематики
Описание
Оси робота
С помощью клавиш перемещения можно перемещать оси робота. Дополнительными осями управлять невозможно.
Дополнительные
оси
С помощью клавиш перемещения можно перемещать все установленные дополнительные оси, например, оси E1–E5.
Имя/
С помощью клавиш перемещения можно перемещать оси внешней группы кинематики.
Внешние группы кинематики n
[Пользовательская
группа кинематики]
Имя принимается из системной переменной
$ETn_NAME (n = номер внешней кинематики).
Если параметр $ETn_NAME пуст, то в качестве
имени по умолчанию показывается Внешняя
группа кинематики n.
С помощью клавиш перемещения можно перемещать оси пользовательской группы кинематики.
Имя соответствует имени пользовательской
группы кинематики.
4.15
Шунтирование контроля рабочей зоны
Описание
Для робота могут быть конфигурированы рабочие зоны. Рабочие зоны
служат для защиты установки.
Имеются 2 вида рабочих зон:
Рабочая зона является запретным участком.
Робот может перемещаться только за пределами рабочей зоны.
Только рабочая зона является разрешенным участком.
Робот не может перемещаться за пределами рабочей зоны.
80 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
4 Управление
Какая последует реакция, если робот переместится за пределы рабочей
зоны, зависит от конфигурации.
Реакция может быть, к примеру, такова, что робот остановится и будет
выдано соответствующее сообщение. В этом случае контроль рабочей
зоны должен быть шунтирован. Тогда робот можно вывести обратно из
запретной зоны.
Необходимое
условие
Группа пользователей "Эксперт"
Режим работы T1
Порядок
действий
1. В главном меню выбрать пункт Конфигурация > Дополнения > Контроль рабочей зоны > Шунтирование.
2. Вывести робот вручную из запретной зоны.
После выхода робота из запретной зоны контроль рабочей зоны ав
томатически включается снова.
4.16
Функции индикации
4.16.1
Измерение и индикация потребления энергии
Описание
Суммарное потребление энергии робота и системы управления роботом
можно отображать на smartHMI. Условием является возможность измерения потребления для применяемого типа робота.
Потребление опциональных компонентов системы управления роботом
(напр., US1, US2 и т.д.) и других систем управления не анализируется.
Всегда отображается потребление за последние 60 минут с момента
последнего холодного пуска. При этом пользователь может и сам запускать и останавливать измерения.
Для значений потребления возможно составление кривой. Для этого предусмотрена заданная конфигурация Tracedef_KRC_EnergyCalc.
Кроме того, при помощи PROFIenergy можно передавать данные в вышестоящую систему управления. PROFIenergy является составляющей
KR C4 PROFINET.
Существуют 2 возможности для запуска и остановки измерений:
Условие
в окне Расход энергии (>>> Рис. 4-24 );
посредством KRL.
Измерение потребления возможно для применяемого типа робота.
Если это не так, поля в окне Расход энергии деактивированы.
Порядок
действий
Запуск и остановка измерения в окне Расход энергии:
1. В главном меню выбрать пункт Индикация > Расход энергии. Открывается окно Расход энергии.
2. При необходимости установить галочку для Обновить.
3. Нажать Запуск измерения. Красная точка справа от верхней строки
будет указывать на то, что измерение выполняется.
4. Чтобы остановить измерение, нажать Останов измерения. Отобразится результат.
Запуск и остановка измерения посредством KRL:
1. Запустить измерение посредством $ENERGY_MEASURING.ACTIVE
= TRUE (возможно в программе KRL или через коррекцию переменных). Измерение запускается.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
81 / 277
KUKA System Software 8.3
2. В главном меню выбрать пункт Индикация > Расход энергии. Открывается окно Расход энергии. Красная точка справа от верхней
строки указывает на выполняемое измерение.
3. При необходимости установить галочку для Обновить.
4. Остановить измерение посредством
$ENERGY_MEASURING.ACTIVE = FALSE.
Окно Расход энергии можно открывать вне зависимости от измерения.
В верхней строке всегда отображается результат текущего и последнего
измерений.
Свойства
измерения
Запущенное измерение выполняется, пока не будет остановлено.
Это не зависит от того, открыто или закрыто окно Расход энергии.
Измерение, запущенное в KRL, можно остановить как в KRL, так и
посредством Останов измерения.
Измерение, запущенное посредством Запуск измерения, может
быть остановлено только при помощи Останов измерения – до тех
пор, пока остается открытым окно Расход энергии. При попытке остановить измерение в KRL система управления роботом выводит
следующее сообщение: В настоящий момент остановка измерения
энергии невозможна..
Если закрыть окно Расход энергии, то измерение можно остановить
и в KRL. Это позволяет не допустить, чтобы запущенное в окне Расход энергии измерение постоянно блокировало измерения в KRL.
Запуск измерения во время выполнения другого измерения невозможен. В этом случае система управления роботом выводит следующее сообщение: Измерение параметров электричества уже
активизировано. Необходимо сначала остановить текущее измерение.
Окно Расход
энергии
Рис. 4-24: Окно Расход энергии
Поз.
1
Описание
Результаты измерений, запущенных пользователем
Отображаются последние 3 результата. Последний результат
указывается в верхней строке. Выполнение измерения сигнализируется красной точкой справа от этой строки.
2
Потребление энергии за последние 60 минут с момента последнего холодного пуска
3
Запуск измерения.
Запуск измерения недоступно во время выполнения измерения.
82 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
4 Управление
Поз.
4
Описание
Остановка текущего измерения.
Метод запуска измерения (посредством Запуск измерения
или через KRL) не имеет значения.
5
4.16.2
С галочкой: во время измерения происходит постоянное
обновление индикации результатов.
Без галочки: во время измерения в окне индикации остается последнее обновленное значение. Новый результат
отображается только после остановки измерения.
Индикация актуальной позиции
Порядок
действий
1. В главном меню выбрать пункт Индикация > Актуальная позиция.
На экране появится актуальная позиция в декартовой системе коор
динат.
2. Чтобы вывести на экран актуальную позицию согласно осям, нажать
кнопку По осям.
3. Чтобы вывести на экран актуальную позицию в декартовой системе
координат, нажать кнопку В прямоугольных координатах.
Описание
Актуальная позиция в декартовой системе координат
Отображается актуальная позиция (X, Y, Z) и ориентация (A, B, C) TCP.
Кроме того, указываются состояние и поворот.
Актуальная позиция согласно осям
На экране показывается актуальная позиция осей A1–A6. При наличии
дополнительных осей отображается также и их позиция.
Отображение актуальной позиции возможно также и в ходе перемеще
ния робота.
Рис. 4-25: Актуальная позиция согласно осям
4.16.3
Отображение цифровых входов/выходов
Порядок
действий
1. В главном меню выбрать пункт Индикация > Входы/выходы > Цифровые входы и выходы.
2. Для отображения определенного входа/выхода:
Нажать кнопку Перейти к. Отображается поле Перейти к:.
Ввести нужный номер и подтвердить его, нажав клавишу ввода.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
83 / 277
KUKA System Software 8.3
Индикация перейдет на вход/выход с этим номером.
Описание
Рис. 4-26: Цифровые входы
Рис. 4-27: Цифровые выходы
Поз.
Описание
1
Номер входа/выхода
2
Значение входа/выхода. Если значение входа/выхода TRUE,
он выделяется красным цветом.
3
Запись SIM: вход/выход моделирован.
Запись SYS: значение входа/выхода сохранено в системной
переменной. Данный вход/выход защищен от записи.
4
Имя входа/выхода
Доступны следующие кнопки:
84 / 277
Кнопка
Описание
-100
Переключение индикации на 100 предыдущих
входов или выходов.
+100
Переключение индикации на 100 следующих
входов или выходов.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
4 Управление
Кнопка
Описание
Перейти к
Здесь можно ввести номер нужного входа или
выхода.
Значение
Переключает выделенный вход или выход
между состояниями TRUE и FALSE. Условие:
нажат переключатель подтверждения.
В режиме работы AUT EXT эта невидимая
кнопка недоступна; кроме того, она недоступна для входов в том случае, если включено
моделирование.
Имя
4.16.4
Здесь имя выделенного входа или выхода
можно изменить.
Отображение аналоговых входов/выходов
Порядок
действий
1. В главном меню выбрать пункт Индикация > Входы/выходы > Аналоговые входы/выходы.
2. Для отображения определенного входа/выхода:
Нажать кнопку Перейти к. Отображается поле Перейти к:.
Ввести нужный номер и подтвердить его, нажав клавишу ввода.
Индикация перейдет на вход/выход с этим номером.
Доступны следующие кнопки:
Кнопка
Описание
Перейти к
Здесь можно ввести номер нужного входа или
выхода.
Напряжения
Здесь для выделенного выхода можно ввести
значение напряжения.
-10 … 10 В
Данная кнопка доступна только для выходов.
Имя
4.16.5
Здесь имя выделенного входа/выхода можно
изменить.
Отображение входов/выходов для внешней автоматики
Порядок
действий
В главном меню выбрать пункт Индикация > Входы/выходы > Внешняя автоматика.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
85 / 277
KUKA System Software 8.3
Описание
Рис. 4-28: Входы внешней автоматики (детальная индикация)
Рис. 4-29: Выходы внешней автоматики (детальная индикация)
Поз.
Описание
1
Номер
2
Состояние
Серый: неактивен (FALSE)
Красный: активен (TRUE)
3
Полное имя входа/выхода
4
Тип
Зеленый: вход/выход
Желтый: переменная или системная переменная ($...)
5
Имя сигнала или переменной
6
Номер входа/выхода или номер канала
Столбцы 4, 5 и 6 отображаются только в том случае, если нажата кнопка
Детали.
В распоряжении имеются следующие невидимые кнопки:
86 / 277
Невидимая кнопка
Описание
Конфиг.
Переключает на конфигурацию для внешней
автоматики.
Входы/Выходы
Переключает между окнами входов и выходов.
Детали/Стандарт.
Переключает между режимами изображения
Детали и Стандарт.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
4 Управление
4.16.6
Индикация циклических флагов
Порядок
действий
1. В главном меню выбрать пункт Индикация > Переменная > Циклические признаки. Открывается окно Циклические признаки.
2. Для отображения определенного флага:
Нажать кнопку Перейти к. Отображается поле Перейти к:.
Ввести нужный номер и подтвердить его, нажав клавишу ввода.
Индикация перейдет на флаг с этим номером.
Описание
Рис. 4-30: Циклические признаки
Поз.
Описание
1
Номер флага
2
Значение флага. Если флаг установлен, он выделяется красным цветом.
3
Имя флага
4
Здесь указано, с какими условиями связана установка циклического флага.
Доступны следующие кнопки:
4.16.7
Кнопка
Описание
-100
Переключение индикации на 100 предыдущих
флагов.
+100
Переключение индикации на 100 следующих
флагов.
Перейти к
Здесь можно ввести номер искомого флага.
Имя
Здесь можно изменить имя выделенного флага.
Индикация флагов
Порядок
действий
1. В главном меню выбрать пункт Индикация > Переменная > Признаки. Открывается окно Признаки.
2. Для отображения определенного флага:
Нажать кнопку Перейти к. Отображается поле Перейти к:.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
87 / 277
KUKA System Software 8.3
Ввести нужный номер и подтвердить его, нажав клавишу ввода.
Индикация перейдет на флаг с этим номером.
Описание
Рис. 4-31: Признаки
Поз.
Описание
1
Номер флага
2
Значение флага. Если флаг установлен, он выделяется красным цветом.
3
Имя флага
Доступны следующие кнопки:
Кнопка
Описание
-100
Переключение индикации на 100 предыдущих
флагов.
+100
Переключение индикации на 100 следующих
флагов.
Перейти к
Здесь можно ввести номер искомого флага.
Значение
Переключает выделенный флаг между состояниями TRUE и FALSE. Условие: нажат переключатель подтверждения.
В режиме AUT EXT эта кнопка не доступна.
Имя
4.16.8
Здесь можно изменить имя выделенного флага.
Индикация счетчика
Порядок
действий
1. В главном меню выбрать пункт Индикация > Переменная > Счетчик. Открывается окно Счетчик.
2. Для отображения определенного счетчика:
Нажать кнопку Перейти к. Отображается поле Перейти к:.
Ввести нужный номер и подтвердить его, нажав клавишу ввода.
Индикация перейдет на счетчик с этим номером.
88 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
4 Управление
Описание
Рис. 4-32: Счетчик
Поз.
Описание
1
Номер счетчика
4
Значение счетчика
5
Имя счетчика
Доступны следующие кнопки:
4.16.9
Кнопка
Описание
Перейти к
Здесь можно ввести номер искомого счетчика.
Значение
Здесь можно ввести значение для выделенного счетчика.
Имя
Здесь можно изменить имя выделенного счетчика.
Индикация таймера
Порядок
действий
1. В главном меню выбрать пункт Индикация > Переменная > Таймер.
Открывается окно Таймер.
2. Для отображения определенного таймера:
Нажать кнопку Перейти к. Отображается поле Перейти к:.
Ввести нужный номер и подтвердить его, нажав клавишу ввода.
Индикация перейдет на таймер с этим номером.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
89 / 277
KUKA System Software 8.3
Описание
Рис. 4-33: Таймер
Поз.
Описание
1
Номер таймера
2
Состояние таймера
3
Если таймер активирован, он выделяется зеленым цветом.
Если таймер деактивирован, он выделяется красным цветом.
Состояние таймера
Когда значение таймера > 0, устанавливается флаг таймера (красная галочка).
Когда значение таймера ≤ 0, флаг таймера не устанавливается.
4
Значение таймера (ед. измерения: мсек)
5
Имя таймера
Доступны следующие кнопки:
Кнопка
Описание
Перейти к
Здесь можно ввести номер искомого таймера.
Статус
Переключает выделенный таймер между состояниями TRUE и FALSE. Условие: нажат переключатель подтверждения.
Значение
Здесь можно ввести значение для выделенного таймера.
Имя
Здесь можно изменить имя выделенного таймера.
4.16.10 Вывод данных калибровки
Порядок
действий
90 / 277
1. В главном меню выбрать пункт Ввод в эксплуатацию > Калибровка
> Точки измерения и выбрать нужный пункт меню:
тип инструмента;
тип базы;
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
4 Управление
внешняя ось.
2. Ввести номер инструмента, базы или внешней кинематики.
На дисплей будет выведен метод калибровки и данные калибровки.
4.16.11 Индикация информации о роботах и системе управления роботом
Порядок
действий
Описание
Информация требуется, например, для запросов в сервисную службу
KUKA.
В главном меню выбрать Помощь > Информация.
Вкладки содержат следующую информацию:
Вкладка
Описание
Информация
Тип системы управления роботом
Версия системы управления роботом
Версия панели управления
Версия основной системы
Имя робота
Тип и конфигурация робота
Время работы
Робот
Счетчик времени работы робота действует,
если приводы включены. Альтернативная возможность отображения времени работы робота
– через переменную $ROBRUNTIME.
Система
Количество осей
Список дополнительных осей
Версия машинных данных
Имя управляющего ПК
Версия операционной системы
Емкость памяти
Опции
Дополнительно установленные опции и функциональные пакеты
Комментарий
Дополнительные комментарии
Модули
Имя и версия основных системных файлов
С помощью кнопки Экспорт содержимое вкладки
Модули переносится в файл
C:\KRC\ROBOTER\LOG\FILEVERSIONS.TX.
4.16.12 Показ/обработка данных робота
Условие
Порядок
действий
Выбран режим работы T1 или T2.
Ни одна из программ не выбрана.
В главном меню выбрать пункт Ввод в эксплуатацию > Данные о
роботе.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
91 / 277
KUKA System Software 8.3
Описание
Рис. 4-34: Окно Данные о роботе
Поз.
Описание
1
Серийный номер
2
Время работы. Счетчик времени работы робота действует,
если приводы включены. Альтернативная возможность отображения времени работы робота – через переменную
$ROBRUNTIME.
3
Имя технических данных
4
Имя робота. Имя робота можно изменить.
5
Данные системы управления роботом можно заархивировать.
Здесь определяется целевой каталог для архивирования. При
этом можно выбрать сетевой или локальный каталог.
Каталог, который здесь определяется, будет также предлагаться для импорта/экспорта длинных текстов.
6
7
8
Если для архивирования по данному сетевому пути необходимо имя пользователя и пароль, их можно ввести здесь же. В
этом случае их не надо будет вводить каждый раз при архивировании.
Это поле показывается только в том случае, если флажок
Включать имена роботов
в имена архивов. не активирован.
Здесь можно ввести имя файла архива.
9
Флажок установлен: в качестве имени файла архива используется имя робота. Если имя робота не установлено,
используется имя archive.
Флажок не установлен: для файла архива можно ввести
другое имя.
Эти кнопки недоступны в группе «Пользователи».
92 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
4 Управление
4.17
Экспорт конфигурации системы безопасности (XML-экспорт)
Описание
Элементы конфигурации системы безопасности можно экспортировать.
Для экспорта создается файл XML. Он содержит исключительно параметры, связанные с использованием опций безопасности, например
SafeOperation.
Возможность экспорта не зависит от того, установлена ли опция безопасности. Однако выполнять экспорт рекомендуется только с установленной опцией безопасности.
Если в системе управления роботом не установлена опция безопасности, параметры в файле XML заполняются значениями по умолчанию (часто «0»).
Если установлена опция безопасности, то помимо экспорта существует также возможность импорта конфигурации системы бе
зопасности. Подробная информация об экспорте и импорте приведена в документации к опциям безопасности.
Кроме того, существует возможность для импорта и экспорта конфигурации системы безопасности в программе WorkVisual. Соответствующая информация приведена в документации к программе WorkVisual.
Порядок
действий
1. В главном меню выбрать пункт Конфигурация > Конфигурация системы безопасности.
Открывается окно Конфигурация системы безопасности.
2. Нажать Экспорт. Отображаются имеющиеся диски.
3. Выбрать нужное место сохранения и нажать Экспорт.
Конфигурация системы безопасности сохраняется как файл XML.
Имя файла создается автоматически.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
93 / 277
KUKA System Software 8.3
94 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
5
Первый и повторный ввод в эксплуатацию
5.1
Ассистент ввода в эксплуатацию
Описание
Ввод в эксплуатацию можно выполнить с помощью соответствующего
ассистента. Он проведет пользователя по основным шагам ввода в эксплуатацию.
Условие
Ни одна из программ не выбрана.
Выбран режим работы T1.
В главном меню выбрать пункт Ввод в эксплуатацию > Ассистент
ввода в эксплуатацию.
т
Порядок
действий
5.2
Проверка технических данных
Описание
Должны быть загружены правильные технические данные. Это необходимо проверить, сравнив загруженные технические данные с техническими данными на заводской табличке.
Если технические данные загружаются заново, версия технических данных должна в точности соответствовать версии KSS. Это требование выполняется в том случае, если используются технические данные,
которые были поставлены вместе с используемой версией KSS.
Если загружены неверные машинные данные, перемещения промышленного робота запрещены!
Иначе существует опасность получения смертельных и тяжелых травм
или опасность нанесения значительного материального ущерба. Должны быть загружены правильные машинные данные.
Рис. 5-1: Заводская табличка
Путь, по которому сохранены технические данные на компакт-диске, указан на заводской табличке в строке ...\MADA\.
Условие
Выбран режим работы T1 или T2.
Ни одна из программ не выбрана.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
95 / 277
KUKA System Software 8.3
Порядок
действий
1. В главном меню выбрать пункт Ввод в эксплуатацию > Данные о
роботе.
Открывается окно Данные о роботе.
2. Сравнить следующие параметры:
5.3
в окне Данные о роботе: значение в поле Параметры машины
на заводской табличке, расположенной на основании робота: значение в строке $TRAFONAME()="# ..... "
Перемещение робота без вышестоящей системы управления безопасностью
Описание
Чтобы переместить робот без вышестоящей системы безопасности, следует включить режим пуска в эксплуатацию. После этого робот можно перемещать в режиме T1.
Если используется опция RoboTeam, то активация режима пуска в эксплуатацию и перемещение робота возможны только с локального планшета smartPAD.
В режиме пуска в эксплуатацию отключаются все
внешние защитные приспособления. Следует
соблюдать указания по технике безопасности, относящиеся к режиму
пуска в эксплуатацию.
(>>> 3.8.3.2 "Режим ввода в эксплуатацию" Страница 37)
В следующих случаях система управления роботом завершает режим
пуска в эксплуатацию автоматически:
если через 30 мин после активации не было выполнено ни одно действие по управлению;
если smartPAD переключается в пассивный режим или отсоединяется от системы управления роботом;
В случае использования предохранительного интерфейса Ethernet:
если устанавливается соединение с вышестоящей системой безопасности;
в случае использования дискретного предохранительного интерфейса:
Системное программное обеспечение 8.2 и предыдущие версии: cистема управления роботом автоматически завершает режим пуска в
эксплуатацию, если не все входные сигналы в дискретном интерфейсе (и в дискретном предохранительном интерфейсе для опций безопасности, если он используется) имеют состояние «логический
нуль».
В системном программном обеспечении версии 8.3, напротив, режим
пуска в эксплуатацию не зависит от состояния входов на дискретных
предохранительных интерфейсах.
Последствие
При активации режима ввода в эксплуатацию все выходы автоматически
переключаются в состояние «логический ноль».
Если система управления роботом оборудована периферийным контактором (US2) и в конфигурации системы безопасности задано, что он
включается в зависимости от разрешения на перемещение, то эти настройки остаются действительными также в режиме ввода в эксплуата
цию. Это значит, что при наличии разрешения на перемещение включается напряжение US2 (также в режиме ввода в эксплуатацию).
В режиме ввода в эксплуатацию выполняется переключение на следующую моделируемую схему расположения входов:
96 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
внешний сигнал АВАРИЙНОГО ОСТАНОВА не подается;
защитная дверь открыта;
безопасный останов 1 не затребован;
безопасный останов 2 не затребован;
безопасный рабочий останов не затребован;
только для VKR C4: E2 замкнут.
Если используется система SafeOperation или SafeRangeMonitoring, то
режим ввода в эксплуатацию влияет на дополнительные сигналы.
Информация о воздействии режима ввода в эксплуатацию при
использовании систем SafeOperation или SafeRangeMonitoring
приведена в документации на систему SafeOperation или
SafeRangeMonitoring.
Условие
Режим работы T1.
Для VKR C4: через накопитель USB или интерфейс Retrofit не активированы никакие сигналы E2/E7.
Для RoboTeam: используется локальный планшет smartPAD.
В случае использования предохранительного интерфейса Ethernet:
отсутствие соединения с вышестоящей системой безопасности.
в случае использования дискретного предохранительного интерфейса:
Только для системного программного обеспечения версии 8.2: все
входные сигналы имеют состояние «логический ноль». При использовании дополнительного дискретного предохранительного интерфейса для опций безопасности все его входные сигналы должны также
иметь состояние «логический нуль».
(Начиная с системного программного обеспечения версии 8.3 режим
ввода в эксплуатацию не зависит от состояния данных входов.)
Порядок
действий
В главном меню выбрать пункт Ввод в эксплуатацию > Сервисное
обслуживание > Режим пуска в эксплуатацию.
Меню
Описание
Режим пуска в эксплуатацию
включен. Касание этого пункта
меню отключает этот режим.
Режим пуска в эксплуатацию
выключен. Касание этого пункта
меню включает этот режим.
5.4
Проверка активации модели робота с точным позиционированием
Описание
При использовании робота с точным позиционированием следует убедиться, что эта модель робота с точным позиционированием активирована.
В случае с роботами с точным позиционированием отклонения от положения компенсируются за счет допусков деталей и эффектов упругости
отдельных роботов. Робот с точным позиционированием размещает программируемый TCP во всей декартовой рабочей зоне в допустимых пределах. Параметры моделирования робота с точным позиционированием
определяются в точке замера и сохраняются в памяти робота в течение
долгого времени (RDC).
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
97 / 277
KUKA System Software 8.3
Модель робота с точным позиционированием действительна
только для состояния робота в момент поставки.
После переоснастки или дооснастки робота (например, удлинителем руки или новой рукой) следует повторно выполнить калибровку
робота.
Функции
Робот с точным позиционированием обладает следующими функциями:
повышенная точность позиционирования, на коэффициент ок. 10;
повышенная точность прохождения траектории;
Условием для повышенной точности позиционирования и про
хождения траектории является верный ввод данных нагрузки в
систему управления роботом.
Порядок
действий
5.5
Обзор
упрощенное принятие программ при замене робота (не требуется дополнительное обучение);
упрощенное принятие программ после автономного программирования с помощью WorkVisual (не требуется дополнительное обучение).
1. В главном меню выбрать пункт Помощь > Информация.
2. На вкладке Робот проверить, что активирована модель робота с точным позиционированием (= указание Робот с точным позиционированием).
Юстировка
Необходима юстировка каждого робота. Только после выполнения юстировки робота возможно его перемещение в прямоугольных координатах
и подвод в программируемую позицию. В процессе юстировки происходит согласование механической и электронной позиций робота. Для этого робот приводится в определенную механическую позицию – в
положение юстировки. Затем значение датчика по каждой оси сохраняется в памяти.
Положение юстировки является сходным для всех роботов, но все же не
одинаковым. Даже отдельные роботы одного типа могут иметь некоторые различия в точности позиции.
98 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
Рис. 5-2: Положение юстировки - приблизительная позиция
Юстировка робота требуется в следующих случаях:
Ситуация
Примечание
При вводе в эксплуатацию
---
После мероприятий техобслуживания, когда нарушена юстировка
робота, например, после замены
двигателя или RDC
(>>> 5.5.8 "Юстировка по исходным данным" Страница 113)
Если было выполнено движение
робота без системы управления
роботом (например, с помощью
устройства свободного вращения)
---
После замены редуктора
Перед новой юстировкой данные
прежней юстировки должны быть
удалены! Данные юстировки удаляются путем деюстировки осей
вручную.
После перемещения до концевого упора со скоростью более
250 мм/с
После столкновения
(>>> 5.5.10 "Деюстировка осей
вручную" Страница 120)
5.5.1
Обзор
Методы юстировки
Возможно применимые для робота методы юстировки зависят от того,
каким типом измерительного патрона он оснащен. Типы различаются по
размеру своих защитных крышек.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
99 / 277
KUKA System Software 8.3
Тип измерительного
патрона
Методы юстировки
Измерительный патрон для
SEMD
Юстировка с помощью контактной
измерительной головки, тип SEMD
Стандартное электронное
наладочное устройство
(Standard Electronic
Mastering Device)
(>>> 5.5.5 "Юстировка с помощью
SEMD" Страница 105)
Защитная крышка с мелкой резьбой M20
Юстировка стрелочным индикатором
(>>> 5.5.6 "Юстировка с помощью
стрелочного индикатора" Страница 111)
Юстировка по исходным данным
Только для юстировки после определенных ремонтных процедур
(>>> 5.5.8 "Юстировка по исходным
данным" Страница 113)
Измерительный патрон для
MEMD
Юстировка с помощью контактной
измерительной головки, тип MEMD
Микроэлектронное наладочное устройство (Mikro
Electronic Mastering Device)
Частично на A6: юстировка по отметке
в виде штриха
Защитная крышка с мелкой резьбой M8
SEMD/MEMD
(>>> 5.5.9 "Юстировка с помощью
MEMD и отметки в виде штриха" Страница 114)
Устройства SEMD и/или MEMD входят в юстировочный комплект компании KUKA. Существует несколько вариантов юстировочных комплектов.
Рис. 5-3: Юстировочный комплект с устройствами SEMD и MEMD
1
Юстировочный блок
4
Устройство SEMD
2
Отвертка для устройства
MEMD
5
Кабели
3
Устройство MEMD
Более тонкий кабель является измерительным проводом. Он соединяет
устройство SEMD или MEMD с юстировочным блоком.
Более толстый кабель является кабелем EtherCAT. Он подсоединяется
к юстировочному блоку и к разъему X32 на роботе.
100 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
Оставить измерительный провод подсоединенным к юстировочному блоку и по возможности
реже отсоединять его. Возможности соединения сенсорного штекерного разъема M8 ограничены. При частом подсоединении/отсоединении на штекерном разъеме могут возникнуть повреждения.
5.5.2
Для контактных измерительных головок, на которых измерительный
провод не зафиксирован, действительно следующее: всегда привинчивать устройство к измерительному патрону без измерительно
го провода. Только после этого подключать измерительный провод
к устройству. Иначе возможно повреждение провода. Точно так же
при демонтаже устройства сначала следует снять с устройства из
мерительный провод. Только после этого отсоединять устройство
от измерительного патрона;
после выполнения юстировки отсоединить провод EtherCAT от
разъема Х32. В противном случае это может привести к помехам
или материальному ущербу.
Перемещение осей в предъюстировочное положение с помощью меток юстировки
Описание
Перед каждой юстировкой необходимо переместить оси в предъюстировочное положение. Каждая ось перемещается так, чтобы метки юстировки оказались друг поверх друга.
Рис. 5-4: Перемещение осей в предюстировочное положение
В некоторых случаях невозможно выровнять оси с помощью ме
ток юстировки, например, при загрязнении меток, в результате
которого они стали неразличимы. Вместо меток юстировки оси
также можно выровнять с помощью контактной измерительной головки.
(>>> 5.5.3 "Перемещение осей в предъюстировочное положение с помощью электронной контактной измерительной головки" Страница 102)
На приведенном ниже изображении показано, где на роботе расположены метки юстировки. В зависимости от типа робота позиции меток незначительно отличаются от изображения.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
101 / 277
KUKA System Software 8.3
Рис. 5-5: Метки юстировки на роботе
Условие
Активирован вид перемещения «Клавиши перемещения».
Выбран режим работы T1.
Перед перемещением осей А4 и А6 в предъюстировочное положение необходимо проследить за
тем, чтобы система подачи электропитания – при ее наличии – находилась в правильном положении и не переворачивалась на 360°.
Порядок
действий
1. Выбрать в качестве системы координат для клавиш перемещения
Оси.
2. Нажать и удерживать нажатым переключатель подтверждения.
Рядом с клавишами перемещения показаны оси от A1 до A6.
3. Нажать клавишу перемещения «плюс» или «минус» для перемещения по оси в положительном или отрицательном направлении.
4. Переместить оси по возрастающей, начиная с A1, так, чтобы метки
юстировки оказались друг поверх друга. (кроме оси A6 на тех роботах, на которых юстировка данной оси выполняется по отметке в виде
штриха).
5.5.3
Перемещение осей в предъюстировочное положение с помощью электронной
контактной измерительной головки
Описание
Перед каждой юстировкой необходимо переместить оси в предъюстировочное положение. Обычно это выполняется с помощью меток юстировки.
Но иногда это невозможно, например, при загрязнении меток, в результате которого они стали неразличимы. Вместо меток юстировки оси также можно выровнять с помощью контактной измерительной головки. О
102 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
достижении предъюстировочного положения сигнализирует светодиод
на пульте smartHMI.
Условие
Активирован вид перемещения «Клавиши перемещения».
Выбран режим работы T1.
Ни одна из программ не выбрана.
Пользователю приблизительно известно предъюстировочное положение осей.
Перед перемещением осей А4 и А6 в предъюстировочное положение необходимо проследить за
тем, чтобы система подачи электропитания – при ее наличии – находилась в правильном положении и не переворачивалась на 360°.
Порядок
действий
1. Вручную переместить робот в позицию, в которой оси находились бы
очень близко к своему предъюстировочному положению. При этом
должна обеспечиваться возможность их последующего перемеще
ния в отрицательном направлении в предъюстировочное положение.
2. В главном меню выбрать пункт Ввод в эксплуатацию > Юстировка
> EMD > С коррекцией нагрузки.
В зависимости от того, для какого процесса требуется регулировка
осей, теперь выбрать пункт Первичная юстировка, Настройка смещения или Со смещением.
3. Далее действовать в соответствии с руководством к соответствующему процессу юстировки до установки измерительной контактной
головки на оси A1 и ее подсоединении с помощью юстировочного
блока к разъему X32.
После этих действий БОЛЬШЕ НЕ СЛЕДОВАТЬ описанию про
цесса юстировки!
Т. е., НЕ НАЖИМАТЬ Юстировка, обучать или Проверить!
4. В интерфейсе smartHMI отображается светодиод EMD в зоне юстировки. Сейчас он должен гореть красным цветом. Внимательно следить за данным светодиодом.
(>>> 5.5.4 "Светодиоды юстировки" Страница 104)
5. Вручную переместить робот в отрицательном направлении. Как только цвет светодиода поменяется с красного на зеленый, остановить
робот.
Теперь ось A1 находится в предъюстировочном положении.
Оси, которые отображаются около светодиодов, не исчезают с
дисплея одна за другой, как обычно. Это происходит только при
самой юстировке.
На данном этапе еще не выполнять юстировку оси. Юстировку
разрешается выполнять только тогда, когда все оси находятся в
положении предъюстировки. При несоблюдении данного указания юстировка не будет правильной.
6. Отсоединить контактную измерительную головку от измерительного
патрона согласно описанию процесса юстировки и снова установить
защитную крышку.
7. Таким же образом переместить остальные оси в предъюстировочное
положение в возрастающей последовательности (кроме оси A6 на
тех роботах, на которых юстировка данной оси выполняется по отметке в виде штриха).
8. Закрыть окно со светодиодами юстировки.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
103 / 277
KUKA System Software 8.3
9. Отсоединить кабель EtherCAT от разъема X32 и от юстировочного
блока.
Оставить измерительный провод подсоединен
ным к юстировочному блоку и по возможности
реже отсоединять его. Возможности соединения сенсорного штекерного разъема M8 ограничены. При частом подсоединении/отсоединении
на штекерном разъеме могут возникнуть повреждения.
5.5.4
Светодиоды юстировки
При выполнении большинства процессов юстировки на интерфейсе
smartHMI отображается перечень осей. Справа около перечня расположены 2 светодиода.
Рис. 5-6: Светодиоды юстировки
Светодиод
Описание
Соединение с EMD
Красный: контактная измерительная головка не соединена с разъемом X32.
Зеленый: контактная измерительная головка соединена с разъемом X32.
Когда данный светодиод отображается красным цветом, светодиод EMD в зоне юстировки отображается серым цветом.
EMD в зоне юстировки
Серый: контактная измерительная головка не соединена с разъемом X32.
Красный: контактная измерительная головка находится в положении, в котором
невозможно выполнить юстировку.
Зеленый: контактная измерительная головка находится или в непосредственной
близости к юстировочной насечке, или на
самой насечке.
Светодиод EMD в зоне юстировки можно использовать, чтобы переместить оси с помощью контактной измерительной головки в предъюстировочное положение. Предъюстировочное положение достигнуто в тот
момент, когда при перемещении вручную в отрицательном направлении
цвет светодиода меняется с красного на зеленый.
(>>> 5.5.3 "Перемещение осей в предъюстировочное положение с помощью электронной контактной измерительной головки" Страница 102)
104 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
5.5.5
Юстировка с помощью SEMD
Обзор
При юстировке с помощью SEMD система управления роботом автоматически перемещает робот в юстировочное положение. Вначале юстировка выполняется без нагрузки, а затем с нагрузкой. Имеется
возможность сохранить несколько юстировок для различных нагрузок.
Шаг
1
Описание
Первичная юстировка
(>>> 5.5.5.1 "Выполнение первичной юстировки (с помощью SEMD)" Страница 105)
Первичная юстировка выполняется без нагрузки.
2
Настройка смещения
(>>> 5.5.5.2 "Настройка смещения (с помощью SEMD)"
Страница 108)
Настройка смещения выполняется с нагрузкой. Разность по отношению к первичной юстировке сохраняется в памяти.
3
При необходимости: Проверка юстировки нагрузки
со смещением
(>>> 5.5.5.3 "Проверка юстировки нагрузки со смещением (с помощью SEMD)" Страница 109)
Проверка юстировки нагрузки со смещением выполняется с нагрузкой, для которой уже была выполнена настройка смещения.
Область применения:
5.5.5.1
проверка первичной юстировки;
восстановление первичной юстировки, если она
утеряна (например, после замены двигателя или
столкновения). Так как настроенное смещение сохраняется и при утрате юстировки, система управления роботом может рассчитать первичную
юстировку.
Выполнение первичной юстировки (с помощью SEMD)
Необходимое
условие
Порядок
действий
Робот не находится под нагрузкой. Т. е., не установлен инструмент
или заготовка и отсутствует дополнительная нагрузка.
Все оси находятся в предъюстировочном положении.
Ни одна из программ не выбрана.
Режим работы T1
Всегда привинчивать устройство SEMD к измерительному патрону без измерительного провода. Только после этого подключать провод к SEMD. Иначе возможно
повреждение провода.
Точно так же при демонтаже SEMD с него сначала следует снять измерительный провод. Только после этого отсоединять устройство SEMD
от измерительного патрона;
после выполнения юстировки отсоединить провод EtherCAT от разъема
Х32. В противном случае это может привести к помехам или материальному ущербу.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
105 / 277
KUKA System Software 8.3
Конкретное используемое устройство SEMD не обязательно
должно полностью соответствовать изображенной на иллюстрации модели. От этого не меняется принцип использования.
1. В главном меню выбрать пункт Ввод в эксплуатацию > Юстировка
> EMD > С коррекцией нагрузки > Первичная юстировка.
Открывается окно. На дисплее отображаются все юстируемые оси.
Выделяется ось с самым низким номером.
2. Снять крышку с разъема X32.
Рис. 5-7: Снятие крышки с разъема X32
3. Подсоединить кабель EtherCAT к X32 и к юстировочному блоку.
Рис. 5-8: Подключение провода EtherCAT к разъему X32
4. Снять с оси, выделенной в окне, защитную крышку измерительного
патрона. (Повернутое устройство SEMD может служить в качестве
отвертки).
106 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
Рис. 5-9: Снятие защитной крышки измерительного патрона
5. Навинтить SEMD на измерительный патрон.
Рис. 5-10: Привинчивание SEMD к измерительному патрону
6. Подключить к устройству SEMD измерительный провод. По кабельной втулке можно определить, как именно провод подсоединяется к
контактным штифтам устройства SEMD.
Рис. 5-11: Подключение измерительного провода к SEMD
7. Если измерительный провод еще не присоединен, подсоединить его
к юстировочному блоку.
8.
Нажать кнопку Юстировка.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
107 / 277
KUKA System Software 8.3
9. Нажать переключатель подтверждения и клавишу запуска.
Как только SEMD проходит измерительную насечку, выполняется
расчет юстировочного положения. Робот автоматически останавливается. Значения сохраняются в памяти. Ось в окне затемняется.
10. Отсоединить измерительный провод от устройства SEMD. Затем
снять устройство SEMD с измерительного патрона и снова установить защитную крышку.
11. Повторить шаги 4 - 10 для всех юстируемых осей.
12. Закрыть окно.
13. Отсоединить кабель EtherCAT от разъема X32 и от юстировочного
блока.
Оставить измерительный провод подсоединен
ным к юстировочному блоку и по возможности
реже отсоединять его. Возможности соединения сенсорного штекерного разъема M8 ограничены. При частом подсоединении/отсоединении
на штекерном разъеме могут возникнуть повреждения.
5.5.5.2
Настройка смещения (с помощью SEMD)
Описание
Выполняется Настройка смещения с нагрузкой. Разность по отношению
к первичной юстировке сохраняется в памяти.
Если робот работает с различными нагрузками Настройка смещения
должна быть выполнена для каждой нагрузки. Для захватов, работающих
с тяжелыми деталями Настройка смещения должна быть выполнена
для захвата без детали и для захвата с деталью.
Условие
Порядок
действий
Те же окружающие условия (температура и т. п.), что и при первичной
юстировке.
Нагрузка установлена на роботе.
Все оси находятся в предъюстировочном положении.
Ни одна из программ не выбрана.
Режим работы T1
Всегда привинчивать устройство SEMD к измерительному патрону без измерительного провода. Только после этого подключать провод к SEMD. Иначе возможно
повреждение провода.
Точно так же при демонтаже SEMD с него сначала следует снять измерительный провод. Только после этого отсоединять устройство SEMD
от измерительного патрона;
после выполнения юстировки отсоединить провод EtherCAT от разъема
Х32. В противном случае это может привести к помехам или материальному ущербу.
1. В главном меню выбрать пункт Ввод в эксплуатацию > Юстировка
> EMD > С коррекцией нагрузки > Настройка смещения.
2. Ввести номер инструмента. Для подтверждения нажать Инструмент
ОК.
Открывается окно. Показываются все оси, для которых инструмент
еще не был запрограммирован. Выделена ось с самым низким номером.
3. Снять крышку с разъема X32. Подсоединить кабель EtherCAT к X32 и
к юстировочному блоку.
108 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
4. Снять с оси, выделенной в окне, защитную крышку измерительного
патрона. (Повернутое устройство SEMD может служить в качестве
отвертки).
5. Навинтить SEMD на измерительный патрон.
6. Подключить к устройству SEMD измерительный провод. По кабельной втулке можно определить, как именно провод подсоединяется к
контактным штифтам устройства SEMD.
7. Если измерительный провод еще не присоединен, подсоединить его
к юстировочному блоку.
8. Нажать кнопку обучать.
9. Нажать переключатель подтверждения и клавишу запуска.
Как только SEMD проходит измерительную насечку, выполняется
расчет юстировочного положения. Робот автоматически останавливается. Открывается окно. Отображается отклонение для этой оси от
первичной юстировки в градусах и инкрементах.
10. Для подтверждения нажать OK. Ось в окне затемняется.
11. Отсоединить измерительный провод от устройства SEMD. Затем
снять устройство SEMD с измерительного патрона и снова установить защитную крышку.
12. Повторить шаги 4 - 11 для всех юстируемых осей.
13. Закрыть окно.
14. Отсоединить кабель EtherCAT от разъема X32 и от юстировочного
блока.
Оставить измерительный провод подсоединен
ным к юстировочному блоку и по возможности
реже отсоединять его. Возможности соединения сенсорного штекерного разъема M8 ограничены. При частом подсоединении/отсоединении
на штекерном разъеме могут возникнуть повреждения.
5.5.5.3
Проверка юстировки нагрузки со смещением (с помощью SEMD)
Описание
Область применения:
проверка первичной юстировки;
восстановление первичной юстировки, если она утеряна (например,
после замены двигателя или столкновения). Так как настроенное
смещение сохраняется и при утрате юстировки, система управления
роботом может рассчитать первичную юстировку.
Проверка оси возможна только после того, как отъюстированы все оси с
более низким номером.
Условие
Те же окружающие условия (температура и т.п.), что и при первичной
юстировке.
На роботе установлена нагрузка, для которой выполнено Настройка
смещения.
Все оси находятся в предъюстировочном положении.
Ни одна из программ не выбрана.
Режим работы T1
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
109 / 277
KUKA System Software 8.3
Порядок
действий
Всегда привинчивать устройство SEMD к измерительному патрону без измерительного провода. Только после этого подключать провод к SEMD. Иначе возможно
повреждение провода.
Точно так же при демонтаже SEMD с него сначала следует снять измерительный провод. Только после этого отсоединять устройство SEMD
от измерительного патрона;
после выполнения юстировки отсоединить провод EtherCAT от разъема
Х32. В противном случае это может привести к помехам или материальному ущербу.
1. В главном меню выбрать пункт Ввод в эксплуатацию > Юстировка
> EMD > С коррекцией нагрузки > Юстировка нагрузки > Со смещением.
2. Ввести номер инструмента. Для подтверждения нажать Инструмент
ОК.
Открывается окно. Отображаются все оси, для которых было настроено смещение с данным инструментом. Выделяется ось с самым низким номером.
3. Снять крышку с разъема X32. Подсоединить кабель EtherCAT к X32 и
к юстировочному блоку.
4. Снять с оси, выделенной в окне, защитную крышку измерительного
патрона. (Повернутое устройство SEMD может служить в качестве
отвертки).
5. Навинтить SEMD на измерительный патрон.
6. Подключить к устройству SEMD измерительный провод. По кабельной втулке можно определить, как именно провод подсоединяется к
контактным штифтам устройства SEMD.
7. Если измерительный провод еще не присоединен, подсоединить его
к юстировочному блоку.
8.
Нажать кнопку Проверить.
9. Удерживать нажатым переключатель подтверждения и нажать клавишу запуска.
Как только SEMD проходит измерительную насечку, выполняется
расчет юстировочного положения. Робот автоматически останавливается. На экране отображается разность относительно значения
«Настройка смещения».
10. При необходимости сохранить значения, нажав кнопку Сохранить.
Прежние значения юстировки при этом будут удалены.
Для восстановления утерянной первичной юстировки всегда сохранять значения.
Оси A4, A5 и A6 механически связаны. Это означает:
при удалении значений для A4 удаляются также значения для A5
и A6.
При удалении значений для A5 удаляются также значения для A6.
11. Отсоединить измерительный провод от устройства SEMD. Затем
снять устройство SEMD с измерительного патрона и снова установить защитную крышку.
12. Повторить шаги 4 - 11 для всех юстируемых осей.
13. Закрыть окно.
14. Отсоединить кабель EtherCAT от разъема X32 и от юстировочного
блока.
110 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
Оставить измерительный провод подсоединен
ным к юстировочному блоку и по возможности
реже отсоединять его. Возможности соединения сенсорного штекерного разъема M8 ограничены. При частом подсоединении/отсоединении
на штекерном разъеме могут возникнуть повреждения.
5.5.6
Юстировка с помощью стрелочного индикатора
Описание
При юстировке с помощью стрелочного индикатора робот вручную перемещается пользователем в положение юстировки. Юстировка всегда выполняется с нагрузкой. Невозможно сохранить в памяти несколько
юстировок для различных нагрузок.
Рис. 5-12: Стрелочный индикатор
Условие
Порядок
действий
Нагрузка установлена на роботе.
Все оси находятся в предъюстировочном положении.
Активирован вид перемещения «Клавиши перемещения»; в качестве
системы координат выбран пункт Оси.
Ни одна из программ не выбрана.
Выбран режим работы T1.
1. В главном меню выбрать пункт Ввод в эксплуатацию > Юстировка
> часы.
Открывается окно. Отображаются все еще не отъюстированные оси.
Выделяется ось, которая должна быть отъюстирована первой.
2. Снять с оси защитную крышку измерительного патрона и установить
стрелочный индикатор на измерительный патрон.
Ключом с внутренним шестигранником ослабить винты на шейке
стрелочного индикатора. Повернуть циферблат таким образом, чтобы он был хорошо виден. Вдавить до упора болт стрелочного индикатора.
Ключом с внутренним шестигранником снова затянуть винты на шейке стрелочного индикатора.
3. Уменьшить значение ручной коррекции до 1%.
4. Переместить ось от «+» к «-». В самой нижней точке измерительной
насечки, определяемой по изменению направления стрелки, установить стрелочный индикатор на нуль.
Если самая нижняя точка была случайно пропущена, перемещать
ось взад-вперед, пока не будет достигнута самая нижняя точка. Не иг-
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
111 / 277
KUKA System Software 8.3
рает роли, выполняется ли перемещение с «+» на «-» или с «-» на
«+».
5. Вернуть ось в предъюстировочное положение.
6. Переместить ось от «+» к «-», пока стрелка не окажется на расстоянии 5 - 10 делений шкалы от нулевого положения.
7. Переключиться на инкрементальное перемещение вручную.
8. Переместить ось от «+» к «-» до достижения нулевого положения.
В случае перехода за нулевое положение: повторить шаги 5 - 8.
9. Нажать кнопку Юстировка. Отъюстированная ось в окне затемняется.
10. Снять стрелочный индикатор с измерительного патрона и снова установить защитную крышку.
11. Переключить с инкрементального перемещения вручную обратно в
обычный режим перемещения.
12. Повторить шаги 2 - 11 для всех юстируемых осей.
13. Закрыть окно.
5.5.7
Юстировка дополнительных осей
Описание
Порядок
действий
Юстировка дополнительных осей KUKA может осуществляться как с
помощью контактной измерительной головки, так и с помощью стрелочного индикатора.
Дополнительные оси, изготовленные не компанией KUKA, можно юстировать с помощью стрелочного индикатора. Если желательна юстировка с помощью контактной измерительной головки, то
дополнительная ось должна быть оснащена измерительными патронами.
Порядок выполнения юстировки дополнительных осей тот же, что и
для осей робота. В меню выбора осей вместе с осями робота теперь
видны также проектируемые дополнительные оси.
Рис. 5-13: Меню выбора юстируемых осей
112 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
Юстировка промышленных роботов с более чем 2 дополнительными осями: если система имеет более 8 осей, необходимо проследить за тем, чтобы измерительный провод контактной
измерительной головки при необходимости был подключен ко второму
RDC.
5.5.8
Юстировка по исходным данным
Описанную здесь последовательность действий нельзя выпол
нять при вводе робота в эксплуатацию.
Описание
Юстировка по исходным данным применима в том случае, если с правильно юстированным роботом должны проводиться профилактические
мероприятия, при которых юстировка будет нарушена. Примеры:
замена RDC;
замена двигателя.
Перед началом профилактических мероприятий робот перемещается в
позицию $MAMES. Затем при юстировке по исходным данным роботу
снова присваиваются осевые значения этих системных переменных. Состояние робота затем становится таким же, каким оно было до нарушения юстировки. Обученные смещения сохраняются. EMD или
стрелочный индикатор не требуются.
Для юстировки по исходным данным не имеет значения, установлена ли
на роботе нагрузка или нет. Юстировка по исходным данным может быть
применена также для дополнительных осей.
Подготовка
Перед началом профилактических мероприятий переместить робот в
позицию $MAMES. Для этого запрограммировать точку PTP $MAMES
и выполнить к ней подвод. Это осуществимо только из группы пользователей "Эксперт"!
Недопустимо, чтобы робот вместо позиции
$MAMES переместился в позицию Default-HOME.
Позиция $MAMES отчасти, но не всегда идентична позиции DefaultHOME. Только в позиции $MAMES возможна правильная юстировка робота по исходным данным. Если юстировка робота по исходным данным выполняется в другой позиции, отличной от $MAMES, как
следствие, возможны травмы и материальный ущерб.
Условие
Порядок
действий
Ни одна из программ не выбрана.
Выбран режим работы T1.
Позиция робота в ходе профилактических мероприятий не претерпела изменений.
Если замена RDC не производилась: данные робота были перенесены с жесткого диска на RDC. (Это осуществимо только из группы
пользователей «Эксперты»!)
1. В главном меню выбрать пункт Ввод в эксплуатацию > Юстировка
> Исходные данные.
Открывается окно опций Юстировка по исходным данным. Отображаются все еще не отъюстированные оси. Выделена ось, которая
должна быть отъюстирована первой.
2. Нажать кнопку Юстир.. Выделенная ось юстируется и затемняется в
окне опций.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
113 / 277
KUKA System Software 8.3
3. Повторить шаг 2 для всех юстируемых осей.
5.5.9
Юстировка с помощью MEMD и отметки в виде штриха
Обзор
При юстировке с помощью MEMD система управления роботом автоматически перемещает робот в положение юстировки. Вначале юстировка
выполняется без нагрузки, а затем с нагрузкой. Имеется возможность сохранить несколько юстировок для различных нагрузок.
Для роботов, которые на оси A6 не имеют обычных меток юстировки,
а только отметки в виде штрихов, юстировка A6 выполняется без устройства MEMD.
(>>> 5.5.9.1 "Перемещение A6 в юстировочное положение (по отметке в виде штриха)" Страница 114)
Для роботов, которые на оси A6 имеют метки юстировки, юстировка
A6 выполняется, как и на других осях.
Шаг
1
Описание
Первичная юстировка
(>>> 5.5.9.2 "Выполнение первичной юстировки (с помощью MEMD)" Страница 115)
Первичная юстировка выполняется без нагрузки.
2
Настройка смещения
(>>> 5.5.9.3 "Настройка смещения (с помощью MEMD)"
Страница 118)
Настройка смещения выполняется с нагрузкой. Разность по отношению к первичной юстировке сохраняется в памяти.
3
При необходимости: Проверка юстировки нагрузки
со смещением
(>>> 5.5.9.4 "Проверка юстировки нагрузки со смещением (с помощью MEMD)" Страница 119)
Проверка юстировки нагрузки со смещением выполняется с нагрузкой, для которой уже была выполнена настройка смещения.
Область применения:
5.5.9.1
проверка первичной юстировки;
восстановление первичной юстировки, если она
утеряна (например, после замены двигателя или
столкновения). Так как настроенное смещение сохраняется и при утрате юстировки, система управления роботом может рассчитать первичную
юстировку.
Перемещение A6 в юстировочное положение (по отметке в виде штриха)
Описание
Для роботов, которые на оси A6 не имеют обычных меток юстировки, а
только отметки в виде штрихов, юстировка A6 выполняется без устройства MEMD.
Перед юстировкой необходимо привести A6 в юстировочное положение.
(Имеется в виду перед общим процессом юстировки, а не непосредственно перед юстировкой самого A6). Для этого на A6 предусмотрены
тонкие штриховые маркировки в металле.
114 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
Для перемещения A6 в юстировочное положение необходимо точно
выверить эти штрихи относительно друг друга.
При выполнении перемещения в положение юстировки важно по
прямой линии смотреть спереди на неподвижный штрих. Если
смотреть на штрих сбоку, то подвижный штрих не получится выровнять достаточно точно. В результате юстировка будет неверной.
Рис. 5-14: Юстировочное положение оси A6 – вид сверху спереди
Устройство
юстировки
Для юстировки оси A6 на KR AGILUS существует специальное устройство юстировки. Его можно использовать опционально. Данное устройство обеспечивает более высокую точность и воспроизводимость
юстировки.
Более подробную информацию об устройстве юстировки см. в
документации Устройство юстировки для оси A6.
5.5.9.2
Выполнение первичной юстировки (с помощью MEMD)
Условие
Робот не находится под нагрузкой. Т. е., не установлен инструмент
или заготовка, и отсутствует дополнительная нагрузка.
Оси находятся в предъюстировочном положении.
Исключением является ось A6, если на ней имеется отметка в виде
штриха: A6 должна находиться в юстировочном положении.
Порядок
действий
Ни одна из программ не выбрана.
Выбран режим работы T1.
1. В главном меню выбрать пункт Ввод в эксплуатацию > Юстировка
> EMD > С коррекцией нагрузки > Первичная юстировка.
Открывается окно. На дисплее отображаются все юстируемые оси.
Выделяется ось с самым низким номером.
2. Снять крышку с разъема X32.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
115 / 277
KUKA System Software 8.3
Рис. 5-15: X32 без крышки
3. Подсоединить кабель EtherCAT к X32 и к юстировочному блоку.
Рис. 5-16: Подключение провода к разъему X32
4. Снять с оси, выделенной в окне, защитную крышку измерительного
патрона.
116 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
Рис. 5-17: Снятие защитной крышки измерительного патрона
5. Навинтить MEMD на измерительный патрон.
Рис. 5-18: Привинчивание MEMD к измерительному патрону
6. Если измерительный провод еще не присоединен, подсоединить его
к юстировочному блоку.
7. Нажать кнопку Юстировка.
8. Нажать переключатель подтверждения и клавишу запуска.
Как только MEMD проходит измерительную насечку, выполняется
расчет положения юстировки. Робот автоматически останавливается. Значения сохраняются в памяти. Ось в окне затемняется.
9. Снять MEMD с измерительного патрона и снова установить защитную крышку.
10. Повторить шаги 4 - 9 для всех юстируемых осей.
Исключение: не относится к оси A6, если на ней имеется отметка в
виде штриха.
11. Закрыть окно.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
117 / 277
KUKA System Software 8.3
12. Выполнять только в том случае, если на оси A6 имеется отметка в
виде штриха:
a. В главном меню выбрать пункт Ввод в эксплуатацию > Юстировка > Исходные данные.
Открывается окно опций Юстировка по исходным данным. На
дисплее отображается выделенная ось A6.
b. Нажать кнопку Юстировка. Выполняется юстировка A6, после
чего ось в окне опций затемняется.
c. Закрыть окно.
13. Отсоединить кабель EtherCAT от разъема X32 и от юстировочного
блока.
Оставить измерительный провод подсоединен
ным к юстировочному блоку и по возможности
реже отсоединять его. Возможности соединения сенсорного штекерного разъема M8 ограничены. При частом подсоединении/отсоединении
на штекерном разъеме могут возникнуть повреждения.
5.5.9.3
Настройка смещения (с помощью MEMD)
Описание
Выполняется Настройка смещения с нагрузкой. Разность по отношению
к первичной юстировке сохраняется в памяти.
Если робот работает с различными нагрузками Настройка смещения
должна быть выполнена для каждой нагрузки. Для захватов, работающих
с тяжелыми деталями Настройка смещения должна быть выполнена
для захвата без детали и для захвата с деталью.
Условие
Те же окружающие условия (температура и т. п.), что и при первичной
юстировке.
На роботе установлена нагрузка.
Оси находятся в предъюстировочном положении.
Исключением является ось A6, если на ней имеется отметка в виде
штриха: A6 должна находиться в юстировочном положении.
Порядок
действий
Ни одна из программ не выбрана.
Выбран режим работы T1.
1. В главном меню выбрать пункт Ввод в эксплуатацию > Юстировка
> EMD > С коррекцией нагрузки > Настройка смещения.
2. Ввести номер инструмента. Подтвердить клавишей Инстр. OK.
Открывается окно. Показываются все оси, для которых инструмент
еще не был запрограммирован. Выделена ось с самым низким номером.
3. Снять крышку с разъема X32.
4. Подсоединить кабель EtherCAT к X32 и к юстировочному блоку.
5. Снять с оси, выделенной в окне, защитную крышку измерительного
патрона.
6. Навинтить MEMD на измерительный патрон.
7. Если измерительный провод еще не присоединен, подсоединить его
к юстировочному блоку.
8. Нажать кнопку Настройка.
9. Нажать переключатель подтверждения и клавишу запуска.
Как только MEMD проходит измерительную насечку, выполняется
расчет юстировочного положения. Робот автоматически останавливается. Открывается окно. Отображается отклонение для этой оси от
первичной юстировки в градусах и инкрементах.
118 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
10. Для подтверждения нажать кнопку OK. Ось в окне затемняется.
11. Снять MEMD с измерительного патрона и снова установить защитную крышку.
12. Повторить шаги 5 - 11 для всех юстируемых осей.
Исключение: не относится к оси A6, если на ней имеется отметка в
виде штриха.
13. Закрыть окно.
14. Выполнять только в том случае, если на оси A6 имеется отметка в
виде штриха:
a. В главном меню выбрать пункт Ввод в эксплуатацию > Юстировка > Исходные данные.
Открывается окно опций Юстировка по исходным данным. На
дисплее отображается выделенная ось A6.
b. Нажать кнопку Юстировка. Выполняется юстировка A6, после
чего ось в окне опций затемняется.
c. Закрыть окно.
15. Отсоединить кабель EtherCAT от разъема X32 и от юстировочного
блока.
Оставить измерительный провод подсоединен
ным к юстировочному блоку и по возможности
реже отсоединять его. Возможности соединения сенсорного штекерного разъема M8 ограничены. При частом подсоединении/отсоединении
на штекерном разъеме могут возникнуть повреждения.
5.5.9.4
Проверка юстировки нагрузки со смещением (с помощью MEMD)
Описание
Область применения:
проверка первичной юстировки;
восстановление первичной юстировки, если она утеряна (например,
после замены двигателя или столкновения). Так как настроенное
смещение сохраняется и при утрате юстировки, система управления
роботом может рассчитать первичную юстировку.
Проверка оси возможна только после того, как отъюстированы все оси с
более низким номером.
Для роботов, которые на оси A6 имеют отметку в виде штрихов, полученное значение для данной оси не отображается. Это значит, что для оси
A6 первичную юстировку нельзя проверить. Тем не менее, можно восстановить утерянную первичную юстировку.
Условие
Те же окружающие условия (температура и т. п.), что и при первичной
юстировке.
На роботе установлена нагрузка, для которой выполнено Настройка
смещения.
Оси находятся в предъюстировочном положении.
Исключением является ось A6, если на ней имеется отметка в виде
штриха: A6 должна находиться в юстировочном положении.
Порядок
действий
Ни одна из программ не выбрана.
Выбран режим работы T1.
1. В главном меню выбрать пункт Ввод в эксплуатацию > Юстировка
> EMD > С коррекцией нагрузки > Юстировка нагрузки > Со смещением.
2. Ввести номер инструмента. Подтвердить клавишей Инстр. OK.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
119 / 277
KUKA System Software 8.3
Открывается окно. Отображаются все оси, для которых было настроено смещение с данным инструментом. Выделяется ось с самым низким номером.
3. Снять крышку с разъема X32.
4. Подсоединить кабель EtherCAT к X32 и к юстировочному блоку.
5. Снять с оси, выделенной в окне, защитную крышку измерительного
патрона.
6. Навинтить MEMD на измерительный патрон.
7. Если измерительный провод еще не присоединен, подсоединить его
к юстировочному блоку.
8. Нажать кнопку Проверить.
9. Удерживать нажатым переключатель подтверждения и нажать клавишу запуска.
Как только MEMD проходит измерительную насечку, выполняется
расчет юстировочного положения. Робот автоматически останавливается. На экране отображается разность относительно значения
«Настройка смещения».
10. При необходимости сохранить значения, нажав кнопку Сохранить.
Прежние значения юстировки при этом будут удалены.
Для восстановления утерянной первичной юстировки всегда сохранять значения.
Оси A4, A5 и A6 механически связаны. Это означает:
при удалении значений для A4 удаляются также значения для A5
и A6.
При удалении значений для A5 удаляются также значения для A6.
11. Снять MEMD с измерительного патрона и снова установить защитную крышку.
12. Повторить шаги 5 - 11 для всех юстируемых осей.
Исключение: не относится к оси A6, если на ней имеется отметка в
виде штриха.
13. Закрыть окно.
14. Выполнять только в том случае, если на оси A6 имеется отметка в
виде штриха:
a. В главном меню выбрать пункт Ввод в эксплуатацию > Юстировка > Исходные данные.
Открывается окно опций Юстировка по исходным данным. На
дисплее отображается выделенная ось A6.
b. Для восстановления утерянной первичной юстировки нажать
кнопку Юстир.. A6 в окне опций затемняется.
c. Закрыть окно.
15. Отсоединить кабель EtherCAT от разъема X32 и от юстировочного
блока.
Оставить измерительный провод подсоединен
ным к юстировочному блоку и по возможности
реже отсоединять его. Возможности соединения сенсорного штекерного разъема M8 ограничены. При частом подсоединении/отсоединении
на штекерном разъеме могут возникнуть повреждения.
5.5.10
Деюстировка осей вручную
Описание
120 / 277
Значения юстировки отдельных осей можно удалить. При деюстировке
оси не движутся.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
Оси A4, A5 и A6 механически связаны. Это означает:
при удалении значений для A4 удаляются также значения для A5
и A6.
При удалении значений для A5 удаляются также значения для A6.
При деюстированном роботе программные кон
цевые выключатели дезактивируются. Робот может дойти до амортизаторов на концевых упорах, что может вызвать его
повреждение, и амортизаторы придется заменить. Деюстированный робот по возможности не перемещать или в максимально возможной сте
пени уменьшить ручную коррекцию.
Условие
Порядок
действий
Ни одна из программ не выбрана.
Выбран режим работы T1.
1. В главном меню выбрать пункт Ввод в эксплуатацию > Юстировка
> Деюстировка. Открывается окно.
2. Выделить деюстируемую ось.
3. Нажать кнопку Деюстир.. Данные юстировки оси удаляются.
4. Повторить шаги 2–3 для всех деюстируемых осей.
5. Закрыть окно.
5.6
Изменение программируемых концевых выключателей
Существует 2 возможности изменить программируемые концевые выключатели:
Ввести необходимые значения вручную.
Автоматически согласовать концевые выключатели с одной или несколькими программами.
При этом система управления роботом определяет минимальные и
максимальные положения осей, которые достигаются в данных программах. Затем эти значения можно установить в качестве программируемых концевых выключателей.
Условие
Порядок
действий
Выбрана группа пользователей «Эксперты».
Выбран режим работы T1, T2 или AUT.
Изменение программируемых концевых выключателей вручную:
1. В главном меню выбрать пункт Ввод в эксплуатацию > Сервисное
обслуживание > Программный концевой выключатель. Открывается окно Программный концевой выключатель.
2. При необходимости изменить концевые выключатели в столбцах Отрицательный и Положительный.
3. Сохранить изменения кнопкой Сохранить.
Согласование программируемых концевых выключателей с программой:
1. В главном меню выбрать пункт Ввод в эксплуатацию > Сервисное
обслуживание > Программный концевой выключатель. Открывается окно Программный концевой выключатель.
2. Нажать Определить автоматически. Отображается следующее сообщение: Выполняется автоматическое определение.
3. Запустить программу, с которой необходимо согласовать концевые
выключатели. Подождать полного выполнения программы и затем
отменить ее выбор.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
121 / 277
KUKA System Software 8.3
В окне Программный концевой выключатель отображается до
стигнутое максимальное и минимальное положение каждой оси.
4. Повторить шаг 3 для всех программ, с которыми необходимо согласовать концевые выключатели.
В окне Программный концевой выключатель отображается достигнутое максимальное и минимальное положение каждой оси, причем относительно всех только что выполненных программ вместе.
5. После выполнения всех необходимых программ нажать Окончание в
окне Программный концевой выключатель.
6. Чтобы перенять определенные значения в качестве программируемых концевых выключателей, нажать Сохранить.
7. При необходимости дополнительно изменить автоматически определенные значения вручную.
Рекомендация: уменьшить определенные минимальные значения на 5°. Увеличить определенные максимальные значения на
5°.
Такая буферная схема предотвращает ситуацию, когда оси при выполнении программы достигают концевых выключателей, в результате
чего активируется останов.
8. Сохранить изменения кнопкой Сохранить.
Описание
Окно Программный концевой выключатель:
Рис. 5-19: До автоматического определения
122 / 277
Поз.
Описание
1
Актуальный концевой выключатель в отрицательном направлении
2
Актуальное положение оси
3
Актуальный концевой выключатель в положительном направлении
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
Рис. 5-20: Во время автоматического определения
Кнопки
Поз.
Описание
4
Минимальное положение, которое ось занимала с момента
начала определения
5
Максимальное положение, которое ось занимала с момента
начала определения
Доступны следующие кнопки (только в группе пользователей «Эксперты»):
Кнопка
Описание
Определить автоматически
Запускает автоматическое определение:
Окончание
Завершает автоматическое определение.
Функция передает определенные минимальные/максимальные положения в столбцы Отрицательный и Положительный, но еще не
сохраняет их.
Сохранить
Сохраняет значения в столбцах Отрицательный и Положительный в качестве программируемых концевых выключателей.
5.7
Калибровка
5.7.1
Калибровка инструмента
Описание
Система управления роботом записывает минимальные и максимальные положения, которые оси занимают, начиная данного момента,
в окно Программный концевой выключатель в столбцы Минимум и Максимум.
При калибровке инструмента оператор присваивает инструменту, закрепленному на установочном фланце, декартову систему координат
(систему координат TOOL).
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
123 / 277
KUKA System Software 8.3
Начало системы координат TOOL расположено в точке, определенной
пользователем. Она называется TCP (Tool Center Point). Как правило,
TCP задается в рабочей точке инструмента.
При стационарном инструменте применять описанный здесь спо
соб калибровки нельзя. Для стационарных инструментов следует использовать специальный вид калибровки. (>>> 5.7.3 "Калибровка стационарного инструмента" Страница 135)
Преимущества калибровки инструмента:
инструмент можно перемещать по прямой в направлении его удара;
инструмент можно повернуть вокруг TCP, не изменяя позицию TCP;
в программном режиме: запрограммированная скорость перемещения сохраняется вдоль траектории движения у TCP.
Может быть сохранено до 16 систем координат TOOL. Переменная:
TOOL_DATA[1…16]).
Сохраняются следующие данные:
X, Y, Z:
исходная точка системы координат TOOL по отношению к системе координат FLANGE;
A, B, C:
ориентация системы координат TOOL по отношению к системе координат FLANGE.
Рис. 5-21: Принцип калибровки TCP
Обзор
124 / 277
Калибровка инструмента состоит из 2 шагов:
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
Шаг
1
Описание
Определение исходной точки системы координат
TOOL
На выбор предлагаются следующие методы:
XYZ, 4 точки;
(>>> 5.7.1.1 "Калибровка TCP: метод XYZ 4 точки"
Страница 125)
база отсчета XYZ.
(>>> 5.7.1.2 "Калибровка TCP: метод базы отсчета
XYZ" Страница 127)
2
Определение ориентации системы координат TOOL
На выбор предлагаются следующие методы:
ABC, 2 точки;
(>>> 5.7.1.4 "Определение ориентации: метод ABC 2
точки" Страница 129)
ABC унив.
(>>> 5.7.1.3 "Определение ориентации: метод ABC
унив." Страница 128)
Если данные калибровки уже известны, их можно ввести напрямую.
(>>> 5.7.1.5 "Цифровой ввод" Страница 131)
5.7.1.1
Калибровка TCP: метод XYZ 4 точки
Метод XYZ 4 точки не применим для роботов-палетоукладчиков.
Описание
С использованием TCP калибруемого инструмента выполняется подвод
к отсчетной точке с 4 различных направлений. Отсчетная точка может
быть выбрана произвольно. Исходя из различных позиций фланца, система управления роботом рассчитывает TCP.
4 позиции фланца, из которых выполняется подвод к отсчетной
точке, должны находиться на достаточном расстоянии друг от
друга.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
125 / 277
KUKA System Software 8.3
Рис. 5-22: Метод XYZ 4 точки
Условие
Порядок
действий
Калибрируемый инструмент монтирован на установочном фланце.
Выбран режим работы T1.
1. В главном меню выбрать пункт Ввод в эксплуатацию > Калибровка
> Инструмент > XYZ 4 точки.
2. Присвоить номер и имя калибруемому инструменту. Нажать кнопку
Продолжить для подтверждения.
3. Посредством TCP подвести робот к отсчетной точке. Нажать кнопку
Калибровка. В окне контрольного запроса нажать кнопку Да.
4. Посредством TCP подвести робот к отсчетной точке с другого направления. Нажать кнопку Калибровка. В окне контрольного запроса
нажать кнопку Да.
5. Дважды повторить шаг 4.
6. Ввести данные полезной нагрузки. (Данный шаг можно опустить,
если вместо этого данные нагрузки вводятся отдельно.)
(>>> 5.8.3 "Ввод данных полезной нагрузки" Страница 151)
7. Нажать кнопку Продолжить для подтверждения.
8. При необходимости координаты и ориентация измеренных точек могут быть отображены в градусах и инкрементах (по отношению к системе координат FLANGE). Для этого нажать кнопку Точки
измерения. Затем с помощью кнопки Назад вернуться к предыдущему изображению экрана.
9. Способ 1: нажать Сохранить и затем сохранить окно с помощью символа закрытия.
Способ 2: нажать ABC 2 точки или ABC унив.. Предыдущие данные
автоматически сохраняются, и открывается окно, в котором можно
указать ориентацию системы координат TOOL.
(>>> 5.7.1.4 "Определение ориентации: метод ABC 2 точки" Страница 129)
126 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
(>>> 5.7.1.3 "Определение ориентации: метод ABC унив." Страница 128)
5.7.1.2
Калибровка TCP: метод базы отсчета XYZ
Описание
При использовании базы отсчета XYZ калибровка нового инструмента
выполняется с использованием уже калиброванного инструмента. Система управления роботом сравнивает позиции фланца и рассчитывает
TCP нового инструмента.
Рис. 5-23: Метод базы отсчета XYZ
Условие
Подготовка
Уже откалиброванный инструмент смонтирован на установочном
фланце.
Выбран режим работы T1.
Определить данные TCP калиброванного инструмента:
1. В главном меню выбрать пункт Ввод в эксплуатацию > Калибровка
> Инструмент > База отсчета XYZ.
2. Ввести номер откалиброванного инструмента.
3. Отображаются данные инструмента. Записать значение X, Y и Z.
4. Закрыть окно.
Порядок
действий
1. В главном меню выбрать пункт Ввод в эксплуатацию > Калибровка
> Инструмент > База отсчета XYZ.
2. Присвоить номер и имя новому инструменту. Нажать кнопку Продолжить для подтверждения.
3. Ввести данные TCP уже откалиброванного инструмента. Нажать
кнопку Продолжить для подтверждения.
4. Посредством TCP подвести робот к отсчетной точке. Нажать кнопку
Калибровка. В окне контрольного запроса нажать кнопку Да.
5. Отвести и снять инструмент. Установить новый инструмент.
6. Посредством TCP подвести новый инструмент к отсчетной точке. Нажать кнопку Калибровка. В окне контрольного запроса нажать кнопку
Да.
7. Ввести данные полезной нагрузки. (Данный шаг можно опустить,
если вместо этого данные нагрузки вводятся отдельно.)
(>>> 5.8.3 "Ввод данных полезной нагрузки" Страница 151)
8. Нажать кнопку Продолжить для подтверждения.
9. При необходимости координаты и ориентация измеренных точек могут быть отображены в градусах и инкрементах (по отношению к системе координат FLANGE). Для этого нажать кнопку Точки
измерения. Затем с помощью кнопки Назад вернуться к предыдущему изображению экрана.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
127 / 277
KUKA System Software 8.3
10. Способ 1: нажать Сохранить и затем сохранить окно с помощью символа закрытия.
Способ 2: нажать ABC 2 точки или ABC унив.. Предыдущие данные
автоматически сохраняются, и открывается окно, в котором можно
указать ориентацию системы координат TOOL.
(>>> 5.7.1.4 "Определение ориентации: метод ABC 2 точки" Страница 129)
(>>> 5.7.1.3 "Определение ориентации: метод ABC унив." Страница 128)
5.7.1.3
Определение ориентации: метод ABC унив.
Описание
Пользователь устанавливает оси системы координат TOOL параллельно
осям системы координат WORLD. Посредстом этого системе управления
роботом сообщается ориентация системы координат TOOL.
Метод имеет 2 варианта:
5D: пользователь сообщает системе управления роботом направление удара инструмента. Направлением удара является по умолчанию ось X. Ориентация других осей задается системой и не доступна
для воздействия пользователя.
Система задает ориентацию других осей всегда одинаково. Если
впоследствии снова понадобится выполнить калибровку инструмента, например, после столкновения, достаточно будет заново определить направление удара инструмента. Поворот вокруг направления
удара не нужно принимать во внимание.
Условие
6D: пользователь сообщает системе управления роботом направление всех 3 осей.
Калибрируемый инструмент смонтирован на установочном фланце.
TCP инструмента уже откалибрована.
Выбран режим работы T1.
Соблюдать следующий порядок действий, если направление
удара инструмента является направлением по умолчанию (= направление Х). Если направление удара изменено на Y или Z, необходимо соответственно изменить порядок действий.
Порядок
действий
1. В главном меню выбрать пункт Ввод в эксплуатацию > Калибровка
> Инструмент > ABC унив..
2. Ввести номер инструмента. Для подтверждения нажать кнопку Далее.
3. В поле 5D/6D выбрать один из вариантов. Для подтверждения нажать
кнопку Далее.
4. Если выбрано 5D:
установить +XTOOL параллельно -ZWORLD (+XTOOL = направление
удара инструмента).
Если выбрано 6D:
установить оси системы координат TOOL следующим образом:
+XTOOL параллельно -ZWORLD (+XTOOL= направление удара инструмента);
+YTOOL параллельно +YWORLD;
+ZTOOL параллельно +XWORLD.
5. Нажать кнопку Калибровка. В окне контрольного запроса нажать
кнопку Да.
128 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
Оба следующих шага не нужны, если данная последовательность действий была вызвана не через главное меню, а после калибровки TCP с помощью кнопки ABC унив..
6. Ввести данные полезной нагрузки. (Данный шаг можно опустить,
если вместо этого данные нагрузки вводятся отдельно.)
(>>> 5.8.3 "Ввод данных полезной нагрузки" Страница 151)
7. Для подтверждения нажать кнопку Далее.
8. При необходимости координаты и ориентация измеренных точек могут быть отображены в градусах и инкрементах (по отношению к системе координат FLANGE). Для этого нажать кнопку Точки
измерения. Затем с помощью кнопки Назад вернуться к предыдущему изображению экрана.
9. Нажать кнопку Сохранить.
5.7.1.4
Определение ориентации: метод ABC 2 точки
Описание
Системе управления роботом сообщаются оси системы координат TOOL
путем подвода инструмента к одной точке на оси X и к одной точке в
плоскости XY.
Этот метод используется, если направления осей должны быть определены особенно точно.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
129 / 277
KUKA System Software 8.3
Рис. 5-24: Метод ABC 2 точки
Условие
Калибрируемый инструмент смонтирован на установочном фланце.
TCP инструмента уже откалибрована.
Выбран режим работы T1.
Соблюдать следующий порядок действий, если направление
удара инструмента является направлением по умолчанию (= направление Х). Если направление удара изменено на Y или Z, необходимо соответственно изменить порядок действий.
Порядок
действий
1. В главном меню выбрать пункт Ввод в эксплуатацию > Замерить >
Инструмент > ABC, 2 точки.
2. Ввести номер установленного инструмента. Для подтверждения нажать Далее.
3. Посредством TCP подвести робот к любой отсчетной точке. Нажать
кнопку Замерить. В окне контрольного запроса нажать кнопку Да.
4. Переместить инструмент таким образом, чтобы отсчетная точка на
оси X совпала с точкой с отрицательным значением X (т. е. против направления удара инструмента). Нажать кнопку Замерить. В окне
контрольного запроса нажать кнопку Да.
5. Переместить инструмент таким образом, чтобы отсчетная точка на
плоскости XY совпала с точкой с положительным значением Y. На-
130 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
жать кнопку Замерить. В окне контрольного запроса нажать кнопку
Да.
Оба следующих шага не нужны, если данная последовательность действий была вызвана не через главное меню, а после калибровки TCP с помощью кнопки ABC, 2 точки.
6. Ввести данные полезной нагрузки. (Данный шаг можно опустить,
если вместо этого данные нагрузки вводятся отдельно.)
(>>> 5.8.3 "Ввод данных полезной нагрузки" Страница 151)
7. Для подтверждения нажать Далее.
8. При необходимости координаты и ориентация измеренных точек могут быть отображены в градусах и инкрементах (по отношению к системе координат FLANGE). Для этого нажать кнопку Точки
измерения. Затем с помощью кнопки Назад вернуться к предыдущему изображению экрана.
9.
5.7.1.5
Нажать кнопку Назад.
Цифровой ввод
Описание
Данные инструмента можно ввести вручную.
Возможные источники данных:
CAD
внешне откалиброванный инструмент
сведения изготовителя инструмента
Для робота-палетоукладчика с 4 осями данные инструмента
должны быть введены в виде цифр. Методы XYZ и ABC использовать нельзя, так как на этих роботах переориентация возможна лишь в ограниченном объеме.
Условие
Порядок
действий
Известны следующие значения:
X, Y, Z по отношению к системе координат FLANGE;
A, B, C по отношению к системе координат FLANGE.
Выбран режим работы T1.
1. В главном меню выбрать пункт Ввод в эксплуатацию > Калибровка
> Инструмент > Цифровой ввод.
2. Присвоить номер и имя калибруемому инструменту. Нажать кнопку
Продолжить для подтверждения.
3. Ввести данные инструмента. Нажать кнопку Продолжить для подтверждения.
4. Ввести данные полезной нагрузки. (Данный шаг можно опустить,
если вместо этого данные нагрузки вводятся отдельно.)
(>>> 5.8.3 "Ввод данных полезной нагрузки" Страница 151)
5. Если доступна функция проверки данных нагрузки онлайн (это зависит от типа робота): выполнить необходимое конфигурирование.
(>>> 5.8.5 "Проверка данных нагрузки онлайн" Страница 152)
6. Нажать кнопку Продолжить для подтверждения.
7. Нажать кнопку Сохранить.
5.7.2
Калибровка базы
Описание
При калибровке базы пользователь присваивает рабочей поверхности
или заготовке декартову систему координат (систему координат BASE).
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
131 / 277
KUKA System Software 8.3
Начало системы координат BASE расположено в точке, определенной
пользователем.
Если инструмент смонтирован на установочном фланце, использовать описанный здесь вид калибровки нельзя. Для инструментов, смонтированных на установочном фланце, следует
использовать специальный вид калибровки. (>>> 5.7.3 "Калибровка
стационарного инструмента" Страница 135)
Преимущества калибровки базы:
TCP может перемещаться вдоль кромок рабочей поверхности или заготовки вручную;
возможно заучивание точек относительно базы. Если необходимо
сместить базу, например, из-за перемещения рабочей поверхности,
точки смещаются вместе с ней, и новое обучение не требуется.
Может быть сохранено не более 32 систем координат BASE. Переменная: BASE_DATA[1–32].
Обзор
Существует 2 метода калибровки базы:
метод 3 точек (>>> 5.7.2.1 "Метод 3 точек" Страница 132)
косвенный метод (>>> 5.7.2.2 "Косвенный метод" Страница 134)
Если данные калибровки уже известны, их можно ввести напрямую.
(>>> 5.7.2.3 "Цифровой ввод" Страница 135)
5.7.2.1
Метод 3 точек
Описание
132 / 277
Осуществляется подвод в начальную точку и 2 другие точки новой базы.
Эти 3 точки определяют новую базу.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
Рис. 5-25: Метод 3 точек
Условие
Порядок
действий
Уже откалиброванный инструмент смонтирован на установочном
фланце.
Выбран режим работы T1.
1. В главном меню выбрать пункт Ввод в эксплуатацию > Калибровка
> База > 3 точки.
2. Присвоить номер и имя новой базе. Нажать кнопку Продолжить для
подтверждения.
3. Ввести номер установленного инструмента. Нажать кнопку Продолжить для подтверждения.
4. Посредством TCP подвести новый инструмент к отсчетной точке. Нажать кнопку Калибровка. В окне контрольного запроса нажать кнопку
Да.
5. С помощью ТСР выполнить подвод к точке на положительной оси Х
новой базы. Нажать кнопку Калибровка. В окне контрольного запроса нажать кнопку Да.
6. С помощью TCP на плоскости XY выполнить подвод к точке с положительным значением Y. Нажать кнопку Калибровка. В окне контрольного запроса нажать кнопку Да.
7. При необходимости координаты и ориентация измеренных точек могут быть отображены в градусах и инкрементах (по отношению к сис-
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
133 / 277
KUKA System Software 8.3
теме координат FLANGE). Для этого нажать кнопку Точки
измерения. Затем с помощью кнопки Назад вернуться к предыдущему изображению экрана.
8. Нажать кнопку Сохранить.
5.7.2.2
Косвенный метод
Описание
Косвенный метод используется в случае, если подвод к начальной точке
базы невозможен, например, так как она расположена внутри заготовки
или вне рабочего пространства робота.
Выполняется подвод к 4 точкам базы, координаты которых должны быть
известны. Система управления роботом рассчитывает базу на основании этих точек.
Рис. 5-26: Косвенный метод
Условие
Порядок
действий
Калиброванный инструмент монтирован на установочном фланце.
Координаты 4 точек новой базы известны, например, из CAD. 4 точки
достижимы для TCP.
Выбран режим работы T1.
1. В главном меню выбрать пункт Ввод в эксплуатацию > Калибровка
> База > Косвенный.
2. Присвоить номер и имя новой базе. Нажать кнопку Продолжить для
подтверждения.
3. Ввести номер установленного инструмента. Нажать кнопку Продолжить для подтверждения.
4. Ввести координаты известной точки новой базы и выполнить подвод
к точке с помощью TCP. Нажать кнопку Калибровка. В окне контрольного запроса нажать кнопку Да.
5. Повторить шаг 4 трижды.
6. При необходимости координаты и ориентация измеренных точек могут быть отображены в градусах и инкрементах (по отношению к сис-
134 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
теме координат FLANGE). Для этого нажать кнопку Точки
измерения. Затем с помощью кнопки Назад вернуться к предыдущему изображению экрана.
7. Нажать кнопку Сохранить.
5.7.2.3
Цифровой ввод
Условие
Известны следующие цифровые значения, например, из CAD:
расстояние от начальной точки базы до начальной точки системы координат WORLD;
поворот осей базы по отношению к системе координат WORLD.
Порядок
действий
Выбран режим работы T1.
1. В главном меню выбрать пункт Ввод в эксплуатацию > Калибровка
> База > Цифровой ввод.
2. Присвоить номер и имя новой базе. Нажать кнопку Продолжить для
подтверждения.
3. Ввести данные. Нажать кнопку Продолжить для подтверждения.
4. Нажать кнопку Сохранить.
5.7.3
Калибровка стационарного инструмента
Обзор
Калибровка стационарного инструмента состоит из 2 шагов:
Шаг
1
Описание
Калибровка TCP стационарного инструмента
TCP стационарного инструмента называется внешней
TCP.
(>>> 5.7.3.1 "Калибровка внешней ТСР" Страница 135)
Если данные калибровки уже известны, их можно ввести
напрямую.
(>>> 5.7.3.2 "Цифровой ввод внешнего TCP" Страница 137)
2
Калибровка заготовки
На выбор предлагаются следующие методы:
прямой метод;
(>>> 5.7.3.3 "Калибровка заготовки: прямой метод"
Страница 138)
косвенный метод.
(>>> 5.7.3.4 "Калибровка заготовки: косвенный метод"
Страница 139)
Система управления роботом сохраняет внешнюю TCP в качестве системы координат BASE и заготовку в качестве системы координат TOOL.
Всего может быть сохранено не более 32 систем координат BASE и 16
систем координат TOOL.
5.7.3.1
Калибровка внешней ТСР
Описание
Вначале пользователь сообщает системе управления роботом TCP стационарного инструмента. Для этого к TCP подводится откалиброванный
инструмент.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
135 / 277
KUKA System Software 8.3
Затем системе управления роботом сообщается ориентация системы координат стационарного инструмента. Для этого пользователь устанавливает систему координат откалиброванного инструмента параллельно
новой системе координат. Имеется 2 варианта:
5D: пользователь сообщает системе управления роботом направление удара инструмента. Направлением удара является по умолчанию ось X. Ориентация других осей задается системой и не доступна
для воздействия пользователя.
Система задает ориентацию других осей всегда одинаково. Если
впоследствии снова понадобится выполнить калибровку инструмента, например, после столкновения, достаточно будет заново определить направление удара инструмента. Поворот вокруг направления
удара не нужно принимать во внимание.
6D: пользователь сообщает системе управления роботом ориентацию всех 3 осей.
Рис. 5-27: Подвод к внешней TCP
Рис. 5-28: Параллельная ориентация систем координат
136 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
Условие
Уже откалиброванный инструмент смонтирован на установочном
фланце.
Выбран режим работы T1.
Соблюдать следующий порядок действий, если направление
удара инструмента является направлением по умолчанию (= направление Х). Если направление удара изменено на Y или Z, необходимо соответственно изменить порядок действий.
Порядок
действий
1. В главном меню выбрать пункт Ввод в эксплуатацию > Калибровка
> Стационарный инструмент > Инструмент.
2. Присвоить номер и имя стационарному инструменту. Нажать кнопку
Продолжить для подтверждения.
3. Ввести номер уже откалиброванного инструмента. Нажать кнопку
Продолжить для подтверждения.
4. В поле 5D/6D выбрать один из вариантов. Нажать кнопку Продолжить для подтверждения.
5. Посредством TCP уже откалиброванного инструмента выполнить
подвод к TCP стационарного инструмента. Нажать кнопку Калибровка. В окне контрольного запроса нажать кнопку Да.
6. Если выбрано 5D:
установить +XBASE параллельно ZFLANGE.
(Т.е. выставить установочный фланец параллельно направлению
действия стационарного инструмента).
Если выбрано 6D:
выставить установочный фланец таким образом, чтобы его оси были
параллельны осям стационарного инструмента:
+XBASE параллельно ZFLANGE;
(Т.е. выставить установочный фланец параллельно направлению
удара инструмента).
+YBASE параллельно +YFLANGE;
+ZBASE параллельно +XFLANGE.
7. Нажать кнопку Калибровка. В окне контрольного запроса нажать
кнопку Да.
8. При необходимости координаты и ориентация измеренных точек могут быть отображены в градусах и инкрементах (по отношению к системе координат FLANGE). Для этого нажать кнопку Точки
измерения. Затем с помощью кнопки Назад вернуться к предыдущему изображению экрана.
9. Нажать кнопку Сохранить.
5.7.3.2
Цифровой ввод внешнего TCP
Условие
Порядок
действий
Известны следующие цифровые значения, например, из CAD:
расстояние от TCP стационарного инструмента до начальной точки системы координат WORLD (X, Y, Z);
поворот осей стационарного инструмента по отношению к системе координат WORLD (A, B, C).
Выбран режим работы T1.
1. В главном меню выбрать пункт Ввод в эксплуатацию > Калибровка
> Стационарный инструмент > Цифровой ввод.
2. Присвоить номер и имя стационарному инструменту. Нажать кнопку
Продолжить для подтверждения.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
137 / 277
KUKA System Software 8.3
3. Ввести данные. Нажать кнопку Продолжить для подтверждения.
4. Нажать кнопку Сохранить.
5.7.3.3
Калибровка заготовки: прямой метод
Описание
Системе управления роботом сообщается начальная точка и 2 другие
точки заготовки. Эти 3 точки однозначно определяют заготовку.
Рис. 5-29
Рис. 5-30: Калибровка заготовки: прямой метод
Условие
Порядок
действий
Заготовка монтирована на установочном фланце.
Монтирован откалиброванный стационарный инструмент.
Выбран режим работы T1.
1. В главном меню выбрать пункт Ввод в эксплуатацию > Калибровка
> Стационарный инструмент > Заготовка > Прямая калибровка.
2. Присвоить номер и имя заготовке. Нажать кнопку Продолжить для
подтверждения.
3. Ввести номер стационарного инструмента. Нажать кнопку Продолжить для подтверждения.
138 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
4. Переместить систему координат заготовки к TCP стационарного инструмента. Нажать кнопку Калибровка. В окне контрольного запроса
нажать кнопку Да.
5. Переместить точку на положительной оси X системы координат заготовки к TCP стационарного инструмента. Нажать кнопку Калибровка.
В окне контрольного запроса нажать кнопку Да.
6. Переместить точку, имеющую положительное значение на плоскости
XY системы координат заготовки, к TCP стационарного инструмента.
Нажать кнопку Калибровка. В окне контрольного запроса нажать
кнопку Да.
7. Ввести данные нагрузки заготовки. (Данный шаг можно опустить,
если вместо этого данные нагрузки вводятся отдельно.)
(>>> 5.8.3 "Ввод данных полезной нагрузки" Страница 151)
8. Нажать кнопку Продолжить для подтверждения.
9. При необходимости координаты и ориентация измеренных точек могут быть отображены в градусах и инкрементах (по отношению к системе координат FLANGE). Для этого нажать кнопку Точки
измерения. Затем с помощью кнопки Назад вернуться к предыдущему изображению экрана.
10. Нажать кнопку Сохранить.
5.7.3.4
Калибровка заготовки: косвенный метод
Описание
Система управления роботом рассчитывает заготовку на основе 4 точек,
координаты которых должны быть известны. Подвод к начальной точке
заготовки не выполняется.
Рис. 5-31: Калибровка заготовки: косвенный метод
Условие
Монтирован откалиброванный стационарный инструмент.
Калибруемая заготовка монтирована на установочном фланце.
Координаты 4 точек новой заготовки известны, например, из CAD. 4
точки достижимы для TCP.
Выбран режим работы T1.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
139 / 277
KUKA System Software 8.3
Порядок
действий
1. В главном меню выбрать пункт Ввод в эксплуатацию > Калибровка
> Стационарный инструмент > Заготовка > Косвенная калибровка.
2. Присвоить номер и имя заготовке. Нажать кнопку Продолжить для
подтверждения.
3. Ввести номер стационарного инструмента. Нажать кнопку Продолжить для подтверждения.
4. Ввести координаты известной точки заготовки и с помощью этой точки выполнить подвод к TCP стационарного инструмента. Нажать
кнопку Калибровка. В окне контрольного запроса нажать кнопку Да.
5. Повторить шаг 4 трижды.
6. Ввести данные нагрузки заготовки. (Данный шаг можно опустить,
если вместо этого данные нагрузки вводятся отдельно.)
(>>> 5.8.3 "Ввод данных полезной нагрузки" Страница 151)
7. Нажать кнопку Продолжить для подтверждения.
8. При необходимости координаты и ориентация измеренных точек могут быть отображены в градусах и инкрементах (по отношению к системе координат FLANGE). Для этого нажать кнопку Точки
измерения. Затем с помощью кнопки Назад вернуться к предыдущему изображению экрана.
9. Нажать кнопку Сохранить.
5.7.4
Переименование инструмента/базы
Условие
Порядок
действий
1. В главном меню выбрать пункт Ввод в эксплуатацию > Калибровка
> Инструмент или База > Изменить имя.
Выбран режим работы T1.
2. Выделить инструмент или базу и нажать кнопку Имя.
3. Ввести новое имя и нажать кнопку Сохранить для подтверждения.
5.7.5
Линейный блок
Линейный блок KUKA – независимый одноосный линейный блок, устанавливаемый на полу или на потолке. Он служит для линейного перемещения робота и управляется системой управления роботом в качестве
дополнительной оси.
Линейный блок представляет собой кинематику ROBROOT. При перемещении линейного блока изменяется положение робота в системе коорди
нат WORLD. Текущее положение робота в системе координат WORLD
описывает вектор $ROBROOT_C.
$ROBROOT_C состоит из:
$ERSYSROOT (статическая часть);
Исходная точка линейного блока по отношению к $WORLD. Эта исходная точка по умолчанию расположена в нулевом положении ли
нейного блока и зависит от $MAMES.
#ERSYS (динамическая часть).
Текущее положение робота на линейном блоке по отношению к
$ERSYSROOT.
140 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
Рис. 5-32: Кинематика ROBROOT – линейный блок
5.7.5.1
Определение необходимости калибровки линейного блока
Описание
Робот находится на фланце линейного блока. В идеальном случае система координат ROBROOT совпадает с системой координат FLANGE линейного блока. В действительности зачастую возникают небольшие
отклонения, которые приводят к тому, что не удается выполнить подвод
в нужное положение. Калибровка служит для того, чтобы исправить отклонения с помощью соответствующих вычислений. (Повороты вокруг
направления движения линейного блока исправить невозможно. Однако
они не приводят к возникновению ошибок при подводе в положения).
При отсутствии отклонений калибровка линейного блока не требуется.
Необходимость калибровки можно определить следующим способом:
Условие
Порядок
действий
Машинные параметры линейного блока установлены и загружены в
систему управления роботом.
Уже откалиброванный инструмент смонтирован на установочном
фланце.
Ни одна из программ не открыта или не выбрана.
Выбран режим работы T1.
1. Выровнять TCP относительно любой точки и наблюдать за ним.
2. Выполнить декартово перемещение линейного блока. (Не по осям!)
Как только TCP остановится: не выполнять калибровку линейной
оси.
Когда TCP переместится: выполнить калибровку линейной оси.
(>>> 5.7.5.2 "Калибровка линейного блока" Страница 141)
Если данные калибровки уже известны (например, из CAD), их можно
ввести напрямую. (>>> 5.7.5.3 "Цифровой ввод линейного блока" Страница 143)
5.7.5.2
Калибровка линейного блока
Описание
При калибровке трижды выполнить подвод к точке начала отсчета с помощью TCP откалиброванного инструмента.
Точку начала отсчета можно выбрать произвольно.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
141 / 277
KUKA System Software 8.3
Положение робота на линейном блоке, из которого выполняется подвод к точке начала отсчета, во всех трех случаях должно быть разным. Эти три положения должны находиться на достаточном
расстоянии друг от друга.
Корректировочные значения, которые определяются во время калибровки, записываются в системной переменной $ETx_TFLA3.
Условие
Порядок
действий
Машинные параметры линейного блока установлены и загружены в
систему управления роботом.
Уже откалиброванный инструмент смонтирован на установочном
фланце.
Ни одна из программ не открыта или не выбрана.
Выбран режим работы T1.
1. В главном меню выбрать пункт Ввод в эксплуатацию > Калибровка
> Внешняя кинематика > Линейный блок.
Система управления роботом автоматически определит линейный
блок и покажет следующие данные на экране:
Внешн. № системы кинематики: номер внешней кинематики (1–
6) ($EX_KIN);
Ось: номер дополнительной оси (1–6) ($ETx_AX);
Имя внешн. кинематики ($ETx_NAME).
(Если системе управления роботом не удалось определить эти значения, например, из-за того, что конфигурация линейного блока еще
не выполнялась, то калибровку продолжить невозможно).
2. Переместить линейный блок с помощью клавиши перемещения «+».
3. Указать направление перемещения линейного блока (положительное или отрицательное). Нажать кнопку Продолжить для подтверждения.
4. Посредством TCP подвести робот к соответствующей точке начала
отсчета.
5. Нажать кнопку Калибровка.
6. Дважды повторить шаги 4 и 5; при этом каждый раз заранее перемещать линейный блок, чтобы подвести робот к точке начала отсчета из
различных положений.
7. Нажать кнопку Сохранить. Значения измерения сохраняются в памяти.
8. На экране появится запрос на то, следует ли изменить уже заученные
позиции.
Если перед калибровкой позиции еще не были заучены, то можно
дать любой ответ на этот вопрос (Да или Нет).
Если позиции были заучены перед калибровкой:
если ответить Да на этот запрос, позиции с базой 0 будут автоматически изменены. Остальные позиции сохранятся без изменений!
Если ответить Нет на этот запрос, то позиции не будут изменены.
После калибровки линейного блока принять сле
дующие меры безопасности:
1. Проверить и при необходимости отрегулировать программные концевые выключатели линейного блока.
2. Проверить программы в режиме T1.
В противном случае возможен материальный ущерб.
142 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
5.7.5.3
Цифровой ввод линейного блока
Условие
Машинные параметры линейного блока установлены и загружены в
систему управления роботом.
Ни одна из программ не открыта или не выбрана.
Известны следующие цифровые значения, например, из CAD:
Порядок
действий
расстояние от фланца основания робота до начальной точки системы координат ERSYSROOT (X, Y, Z);
ориентация фланца основания робота по отношению к системе
координат ERSYSROOT (A, B, C).
Выбран режим работы T1.
1. В главном меню выбрать пункт Ввод в эксплуатацию > Калибровка
> Внешняя кинематика > Линейный блок (цифровой ввод).
Система управления роботом автоматически определит линейный
блок и покажет следующие данные на экране:
Внешн. № системы кинематики: номер внешней кинематики (1–
6);
Ось: номер дополнительной оси (1–6);
Имя внешн. кинематики.
(Если системе управления роботом не удалось определить эти значения, например, из-за того, что конфигурация линейного блока еще
не выполнялась, то калибровку продолжить невозможно).
2. Переместить линейный блок с помощью клавиши перемещения «+».
3. Указать направление перемещения линейного блока (положительное или отрицательное). Нажать кнопку Продолжить для подтверждения.
4. Ввести данные. Нажать кнопку Продолжить для подтверждения.
5. Нажать кнопку Сохранить. Значения измерения сохраняются в памяти.
6. На экране появится запрос на то, следует ли изменить уже заученные
позиции.
Если перед калибровкой позиции еще не были заучены, то можно
дать любой ответ на этот вопрос (Да или Нет).
Если позиции были заучены перед калибровкой:
если ответить Да на этот запрос, позиции с базой 0 будут автоматически изменены. Остальные позиции сохранятся без изменений!
Если ответить Нет на этот запрос, то позиции не будут изменены.
После калибровки линейного блока принять сле
дующие меры безопасности:
1. Проверить и при необходимости отрегулировать программные концевые выключатели линейного блока.
2. Проверить программы в режиме T1.
В противном случае возможен материальный ущерб.
5.7.6
Калибровка внешней кинематики
Описание
Калибровка внешней кинематики требуется для того, чтобы оси кинематики синхронно и математически связанно перемещались вместе с ося
ми робота. Внешней кинематикой может быть поворотный откидной стол
или позиционер.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
143 / 277
KUKA System Software 8.3
Для линейных блоков применять описанный здесь способ калиб
ровки нельзя. Для них следует использовать специальный вид
калибровки.
(>>> 5.7.5 "Линейный блок" Страница 140)
Обзор
Калибровка внешней кинематики состоит из 2 шагов:
Шаг
1
Описание
Выполнить калибровку исходной точки внешней кинематики.
(>>> 5.7.6.1 "Калибровка исходной точки" Страница 144)
Если данные калибровки уже известны, их можно ввести
напрямую.
(>>> 5.7.6.2 "Цифровой ввод исходной точки" Страница 146)
2
Если на внешней кинематике находится заготовка: выполнить калибровку базы заготовки.
(>>> 5.7.6.3 "Калибровка базы инструмента" Страница 146)
Если данные калибровки уже известны, их можно ввести
напрямую.
(>>> 5.7.6.4 "Цифровой ввод базы инструмента" Страница 148)
Если на внешней кинематике установлен инструмент:
выполнить калибровку внешнего инструмента.
(>>> 5.7.6.5 "Калибровка внешнего инструмента" Страница 148)
Если данные калибровки уже известны, их можно ввести
напрямую.
(>>> 5.7.6.6 "Цифровой ввод внешнего инструмента"
Страница 150)
5.7.6.1
Калибровка исходной точки
Описание
Чтобы перемещать робот математически связанно с кинематикой, робот
должен знать точное местоположение кинематики. Это местоположение
указывается с помощью калибровки исходной точки.
С помощью TCP откалиброванного инструмента точка начала отсчета
подводится к кинематике четыре раза. Каждый раз положение точки начала отсчета должно быть другим. Это можно выполнить с помощью перемещения осей кинематики. Система управления роботом
рассчитывает исходную точку кинематики из различных положений.
Во внешних кинематиках от компании KUKA точка начала отсчета устанавливается в машинных данных в системной переменной $ETx_TPINFL.
Она содержит положение точки начала отсчета относительно системы
координат кинематики FLANGE. (x = номер кинематики). Точка начала отсчета также указана на кинематике. При калибровке следует выполнить
подвод робота к этой точке начала отсчета.
Во внешних кинематиках не от компании KUKA следует установить точку
начала отсчета в машинных данных.
Система управления роботом сохраняет координаты исходной точки в
качестве системы координат BASE.
144 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
Рис. 5-33: Принцип калибровки исходной точки
Условие
Порядок
действий
Машинные параметры кинематики установлены и загружены в систему управления роботом.
Известен номер внешней кинематики.
Уже откалиброванный инструмент смонтирован на установочном
фланце.
Если требуется изменить параметр $ETx_TPINFL: выбрана группа
пользователей «Эксперты».
Выбран режим работы T1.
1. В главном меню выбрать пункт Ввод в эксплуатацию > Калибровка
> Внешняя кинематика > Исходная точка.
2. Выбрать номер системы координат BASE, в качестве которой следует сохранить исходную точку. Нажать кнопку Продолжить для подтверждения.
3. Ввести номер внешней кинематики.
4. Присвоить имя для внешней кинематики. Нажать кнопку Продолжить для подтверждения.
5. Ввести номер базового инструмента. Нажать кнопку Продолжить
для подтверждения.
6. На экране появится значение параметра $ETx_TPINFL.
Если это значение неверно: это значение можно изменить в группе пользователей «Эксперты».
Если это значение верно: нажать кнопку Продолжить для подтверждения.
7. Посредством TCP подвести робот к соответствующей точке начала
отсчета.
8. Нажать кнопку Калибровка. Нажать кнопку Продолжить для подтверждения.
9. Трижды повторить шаги 7 и 8. При этом каждый раз заранее перемещать кинематику, чтобы подвести робот к точке начала отсчета из
различных положений.
10. Нажать кнопку Сохранить.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
145 / 277
KUKA System Software 8.3
5.7.6.2
Цифровой ввод исходной точки
Условие
Порядок
действий
Известны следующие цифровые значения, например, из CAD:
расстояние от начальной точки системы координат ROOT до начальной точки системы координат WORLD (X, Y, Z);
ориентация системы координат ROOT по отношению к системе
координат WORLD (A, B, C).
Известен номер внешней кинематики.
Выбран режим работы T1.
1. В главном меню выбрать пункт Ввод в эксплуатацию > Калибровка
> Внешняя кинематика > Исходная точка (цифровой ввод).
2. Выбрать номер системы координат BASE, в качестве которой следует сохранить исходную точку. Нажать кнопку Продолжить для подтверждения.
3. Ввести номер внешней кинематики.
4. Присвоить имя для внешней кинематики. Нажать кнопку Продолжить для подтверждения.
(Имя также будет автоматически присвоено системе координат
BASE).
5. Указать данные системы координат ROOT. Нажать кнопку Продолжить для подтверждения.
6. Нажать кнопку Сохранить.
5.7.6.3
Калибровка базы инструмента
Описание
При этой калибровке пользователь назначает определенную систему координат BASE для инструмента, который находится на кинематике. Эта
система координат BASE соотносится с системой координат FLANGE кинематики. Таким образом, база является передвижной и перемещается
точно так же, как кинематика.
Калибровка базы не является обязательной. Если калибровка не выполнялась, базой считается система координат кинематики FLANGE.
При калибровке выполняется подвод с помощью TCP уже откалиброванного инструмента к исходной точке и двум следующим точкам нужной ба
зы. Эти 3 точки определяют базу. Для одной кинематики можно откалибровать только одну базу.
146 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
Рис. 5-34: Принцип калибровки базы
Условие
Порядок
действий
Машинные параметры кинематики установлены и загружены в систему управления роботом.
Уже откалиброванный инструмент смонтирован на установочном
фланце.
Выполнена калибровка исходной точки внешней кинематики.
Известен номер внешней кинематики.
Выбран режим работы T1.
1. В главном меню выбрать пункт Ввод в эксплуатацию > Калибровка
> Внешняя кинематика > Смещение.
2. Ввести номер системы координат BASE, в качестве которой была сохранена исходная точка. На экране появится имя системы координат
BASE.
Нажать кнопку Продолжить для подтверждения.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
147 / 277
KUKA System Software 8.3
3. Ввести номер внешней кинематики. На экране появится название
внешней кинематики.
Нажать кнопку Продолжить для подтверждения.
4. Ввести номер базового инструмента. Нажать кнопку Продолжить
для подтверждения.
5. Посредством TCP подвести базу инструмента к отсчетной точке. Нажать кнопку Калибровка и кнопку Продолжить для подтверждения.
6. С помощью ТСР выполнить подвод к точке на положительной оси Х
базы инструмента. Нажать кнопку Калибровка и кнопку Продолжить
для подтверждения.
7. С помощью TCP на плоскости XY выполнить подвод к точке с положительным значением Y. Нажать кнопку Калибровка и кнопку Продолжить для подтверждения.
8. Нажать кнопку Сохранить.
5.7.6.4
Цифровой ввод базы инструмента
Условие
Порядок
действий
Известны следующие цифровые значения, например, из CAD:
расстояние от начальной точки базы инструмента до начальной
точки системы координат кинематики FLANGE (X, Y, Z);
поворот осей базы инструмента по отношению к системе координат кинематики FLANGE (A, B, C).
Выполнена калибровка исходной точки внешней кинематики.
Известен номер внешней кинематики.
Выбран режим работы T1.
1. В главном меню выбрать пункт Ввод в эксплуатацию > Калибровка
> Внешняя кинематика > Смещение (цифровой ввод).
2. Ввести номер системы координат BASE, в качестве которой была сохранена исходная точка. На экране появится имя системы координат
BASE.
Нажать кнопку Продолжить для подтверждения.
3. Ввести номер внешней кинематики. На экране появится название
внешней кинематики.
Нажать кнопку Продолжить для подтверждения.
4. Ввести данные. Нажать кнопку Продолжить для подтверждения.
5. Нажать кнопку Сохранить.
5.7.6.5
Калибровка внешнего инструмента
Описание
При калибровке внешнего инструмента оператор присваивает систему
координат инструменту, закрепленному на кинематике. Эта система координат имеет начальную точку в TCP внешнего инструмента и связана
с системой координат FLANGE кинематики.
Вначале пользователь сообщает системе управления роботом TCP инструмента, который закреплен на кинематике. Для этого к TCP подводится
откалиброванный инструмент.
Затем системе управления роботом сообщается ориентация системы координат этого инструмента. Для этого пользователь устанавливает систему координат откалиброванного инструмента параллельно новой
системе координат. Имеется 2 варианта:
148 / 277
5D: пользователь сообщает системе управления роботом направление удара инструмента. Направлением удара является по умолча-
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
нию ось X. Ориентация других осей задается системой и недоступна
для воздействия пользователя.
Система задает ориентацию других осей всегда одинаково. Если
впоследствии снова понадобится выполнить калибровку инструмента, например, после столкновения, достаточно будет заново определить направление удара инструмента. Поворот вокруг направления
удара не нужно принимать во внимание.
6D: пользователь сообщает системе управления роботом направление всех 3 осей.
Если используется 6D: рекомендуется задокументировать ориентацию всех осей. Если впоследствии снова понадобится выполнить калибровку инструмента, например, после
столкновения, оси необходимо ориентировать как в первый раз, чтобы
и дальше выполнять корректные подводы к существующим точкам.
Система управления роботом сохраняет координаты внешнего инструмента в качестве системы координат BASE.
Условие
Машинные параметры кинематики установлены и загружены в систему управления роботом.
Уже откалиброванный инструмент смонтирован на установочном
фланце.
Выполнена калибровка исходной точки внешней кинематики.
Известен номер внешней кинематики.
Выбран режим работы T1.
Соблюдать следующий порядок действий, если направление
удара инструмента является направлением по умолчанию (= направление Х). Если направление удара изменено на Y или Z, необходимо соответственно изменить порядок действий.
Порядок
действий
1. В главном меню выбрать пункт Ввод в эксплуатацию > Калибровка
> Стационарный инструмент > Смещение внешней кинематики.
2. Ввести номер системы координат BASE, в качестве которой была сохранена исходная точка. На экране появится имя системы координат
BASE.
Нажать кнопку Продолжить для подтверждения.
3. Ввести номер внешней кинематики. На экране появится название
внешней кинематики.
Нажать кнопку Продолжить для подтверждения.
4. Ввести номер базового инструмента. Нажать кнопку Продолжить
для подтверждения.
5. В поле 5D/6D выбрать один из вариантов. Нажать кнопку Продолжить для подтверждения.
6. Посредством TCP откалиброванного инструмента выполнить подвод
к TCP внешнего инструмента. Нажать кнопку Калибровка и кнопку
Продолжить для подтверждения.
7. Если выбрано 5D:
установить +XBASE параллельно ZFLANGE.
(Т.е. выставить установочный фланец параллельно направлению
удара инструмента).
Если выбрано 6D:
выставить установочный фланец таким образом, чтобы его оси были
параллельны осям внешнего инструмента:
+XBASE параллельно ZFLANGE;
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
149 / 277
KUKA System Software 8.3
(Т.е. выставить установочный фланец параллельно направлению
удара инструмента).
+YBASE параллельно +YFLANGE;
+ZBASE параллельно +XFLANGE.
8. Нажать кнопку Калибровка и кнопку Продолжить для подтверждения.
9. Нажать кнопку Сохранить.
5.7.6.6
Цифровой ввод внешнего инструмента
Условие
Порядок
действий
Известны следующие цифровые значения, например, из CAD:
расстояние от TCP внешнего инструмента до начальной точки
системы координат кинематики FLANGE (X, Y, Z);
поворот осей внешнего инструмента по отношению к системе координат кинематики FLANGE (A, B, C).
Выбран режим работы T1.
1. В главном меню выбрать пункт Ввод в эксплуатацию > Калибровка
> Стационарный инструмент > Цифровой ввод.
2. Присвоить номер и имя внешнему инструменту. Нажать кнопку Продолжить для подтверждения.
3. Ввести данные. Нажать кнопку Продолжить для подтверждения.
4. Нажать кнопку Сохранить.
5.8
Данные нагрузки
Данные нагрузки учитываются при расчете траекторий и ускорений, а
также используются для оптимизации длительности такта. Данные нагрузки должны быть введены в систему управления роботом.
Источники
5.8.1
Данные нагрузки можно взять из следующих источников:
опция программного обеспечения KUKA.LoadDataDetermination
(только полезные нагрузки на фланец);
сведения изготовителя;
расчет вручную;
программы CAD.
Проверка нагрузок с помощью KUKA.Load
Все данные нагрузки (полезная нагрузка и дополнительные нагрузки)
должны быть проверены с помощью программы KUKA.Load. Исключение: если полезная нагрузка проверяется с помощью программы
KUKA.LoadDataDetermination, то проверка с KUKA.Load не требуется.
При проверке с KUKA.Load может быть составлен приемочный протокол
(Sign Off Sheet) по нагрузкам. Программу KUKA.Load вместе с документацией можно бесплатно загрузить с веб-сайта KUKA www.kuka.com.
Более подробная информация приведена в документации про
граммы KUKA.Load.
150 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
5.8.2
Определение нагрузки с помощью KUKA.LoadDataDetermination
Описание
С помощью KUKA.LoadDataDetermination можно точно определить полезную нагрузку и передать эти данные в систему управления роботом.
Условие
Выбран режим работы T1 или T2.
Ни одна из программ не выбрана.
В главном меню выбрать пункт Ввод в эксплуатацию > Сервис >
Определение нагрузки.
Порядок
действий
Более подробная информация приведена в документации про
граммы KUKA.LoadDataDetermination.
5.8.3
Ввод данных полезной нагрузки
Описание
Данные полезной нагрузки необходимо ввести в систему управления роботом и присвоить соответствующему инструменту.
Исключение: если данные полезной нагрузки уже были внесены программой KUKA.LoadDataDetermination в систему управления роботом, то вводить их вручную больше не нужно.
Условие
Порядок
действий
1. В главном меню выбрать пункт Ввод в эксплуатацию > Калибровка
> Инструмент > Данные нагрузки инструмента.
Данные полезной нагрузки проверены с помощью программ
KUKA.Load или KUKA.LoadDataDetermination, робот пригоден для
этих полезных нагрузок.
2. В поле № инструмента ввести номер инструмента. Нажать кнопку
Продолжить для подтверждения.
3. Ввести данные полезной нагрузки:
поле M: масса;
поля X, Y, Z: положение центра тяжести по отношению к фланцу;
поля A, B, C: ориентация главных осей инерции по отношению к
фланцу;
поля JX, JY, JZ: моменты инерции масс.
(JX – инерция вокруг оси X системы координат, которая посредством A, B и C повернута по отношению к фланцу. JY и JZ – соответственно, инерции вокруг осей Y и Z).
Или, если для данного типа робота должны использоваться значения
по умолчанию: нажать По умолчанию.
4. Если доступна функция проверки данных нагрузки онлайн (это зависит от типа робота): выполнить необходимое конфигурирование.
(>>> 5.8.5 "Проверка данных нагрузки онлайн" Страница 152)
5. Нажать кнопку Продолжить для подтверждения.
6. Нажать кнопку Сохранить.
5.8.4
Ввод данных дополнительной нагрузки
Описание
Данные дополнительной нагрузки должны быть введены в систему управления роботом.
Базовые системы значений X, Y, Z по каждой дополнительной нагрузке:
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
151 / 277
KUKA System Software 8.3
Нагрузка
Дополнительная нагрузка A1
Дополнительная нагрузка A2
Дополнительная нагрузка A3
Базовая система
Система координат ROBROOT
A1 = 0°
Система координат ROBROOT
A2 = -90°
Система координат FLANGE
A4 = 0°, A5 = 0°, A6 = 0°
Условие
Данные дополнительной нагрузки были проверены программой
KUKA.Load и пригодны для робота этого типа.
Порядок
действий
1. В главном меню выбрать пункт Ввод в эксплуатацию > Калибровка
> Данные дополнительной загрузки.
2. Ввести номер оси, на которой закреплена дополнительная нагрузка.
Нажать кнопку Продолжить для подтверждения.
3. Ввести данные нагрузки. Нажать кнопку Продолжить для подтверждения.
4. Нажать кнопку Сохранить.
5.8.5
Проверка данных нагрузки онлайн
Конфигурация
Конфигурация OLDC возможна в следующих случаях:
При ручном вводе данных инструмента
(>>> 5.7.1.5 "Цифровой ввод" Страница 131)
При отдельном вводе данных нагрузки
(>>> 5.8.3 "Ввод данных полезной нагрузки" Страница 151)
В том же окне, в котором вводятся данные нагрузки, отображаются следующие поля:
Рис. 5-35: Проверка данных нагрузки онлайн
152 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
Поз.
1
Описание
TRUE: OLDC для отображенного в этом же окне инструмента
активно. При повышенной или недостаточной нагрузке выполняются определенные реакции.
FALSE: OLDC для отображенного в этом же окне инструмента
неактивно. При повышенной или недостаточной нагрузке реакция отсутствует.
2
3
Здесь можно определить, какая реакция должна происходить
при повышенной нагрузке.
Нет: без какой-либо реакции.
Предупреждение: система управления роботом выдает
следующее сообщение о состоянии: При проверке нагрузки робота (инструмент {№}) определена перегрузка.
Останов робота: система управления роботом выдает
квитируемое сообщение с таким же содержанием, как при
предупреждении. Робот останавливается по схеме останова STOP 2.
Здесь можно определить, какая реакция должна происходить
при недостаточной нагрузке. Возможные реакции аналогичны
вариантам при повышенной нагрузке.
Реакции можно изменить в программе KRL посредством системной переменной $LDC_CONFIG.
5.9
Экспорт/импорт длинных текстов
Описание
После присвоения имен входам/выходам, признакам и т. п. эти имена
(так называемые «длинные тексты») можно экспортировать в файл. Также возможен импорт файла с именами длинных текстов. Благодаря этому полные имена после переустановки не потребуется вводить вручную
для каждого робота.
Длинные тексты можно экспортировать на накопитель USB или в каталог,
который определен в окне Данные о роботе в разделе Путь к архиву в
сети. Те же самые каталоги предлагаются как исходные каталоги для импорта.
Условие
Или: использование накопителя USB
Или: для цели выполнена конфигурация в окне Данные о роботе,
разделе Путь к архиву в сети.
Только для импорта:
имена длинных текстов записаны в виде файла TXT или CSV;
файл имеет такую форму, которая позволяет его импортировать.
Файл, который уже был создан в результате экспорта длинного текста,
автоматически имеет такую форму, которая подходит для его повторного
импортирования. Если в файл планируется вписывать имя вручную, рекомендуется сначала задать в систему управления роботом несколько
образцов длинных текстов, затем выполнить их экспортирование и заполнить экспортированный файл.
Порядок
действий
1. Если используется накопитель USB, присоединить его к шкафу или
пульту smartPAD.
2. В главном меню выбрать пункт Ввод в эксплуатацию > Сервисное
обслуживание > длинные тексты. Открывается окно длинные тексты.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
153 / 277
KUKA System Software 8.3
3. По необходимости открыть вкладку Экспорт или Импортировать.
Выполнить нужные настройки.
4. Нажать кнопку Экспорт или Импортировать.
После завершения импортирования появляется сообщение Импорт
выполнен успешно..
После завершения экспортирования появляется сообщение Экспорт выполнен успешно..
Вкладка Экспорт
Рис. 5-36: Экспорт длинных текстов
Поз.
1
Описание
Выбрать, куда следует экспортировать файл.
Позицию Сеть можно выбрать только в том случае, если в
окне Данные о роботе выполнена конфигурация пути.
2
Указать нужное имя файла.
Если в позиции 1 была выбрана опция Сеть, отображается
имя архива, заданное в окне Данные о роботе. Здесь имя
можно изменить. Но это не изменяет имени в окне Данные о
роботе.
Имя автоматически снабжается дополнением, зависящим от
выбранного языка.
3
Выбрать, из какого языка требуется экспортировать длинные
тексты (описания). Если, например, smartHMI установлено на
«English», а здесь будет выбрано «Italiano», то будет создан
файл с дополнением «it». В него будут внесены длинные тексты, записанные в итальянский вариант smartHMI.
Можно также выбрать Все языки.
154 / 277
4
Выбрать нужный формат файла.
5
Запуск экспорта.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
Вкладка Импор
тировать
Рис. 5-37: Импорт длинных текстов
Поз.
1
Описание
Указать, откуда должен выполняться импорт.
Позицию Сеть можно выбрать только в том случае, если в
окне Данные о роботе выполнена конфигурация пути.
2
Указать имя импортируемого файла, но без сокращенного
обозначения языка.
Если в позиции 1 была выбрана опция Сеть, отображается
имя архива, заданное в окне Данные о роботе. Здесь имя
можно изменить. Но это не изменяет имени в окне Данные о
роботе.
3
Указать язык, соответствующий сокращенному обозначению
языка файла.
4
Указать формат файла.
5
Активирован: все существующие длинные тексты удаляются. Содержание файла перенимается.
Дезактивирован: введенная в файл информация переписывает существующие длинные тексты. Существующие
длинные тексты, для которых в файле отсутствует запись,
сохраняются.
6
5.10
Запуск импорта.
Руководство по техобслуживанию
В системном программном обеспечении KUKA доступна функция Руководство по техобслуживанию. Руководство по техобслуживанию позволяет протоколировать работы по техобслуживанию.
Запротоколированные работы по техобслуживанию можно просмотреть
в специальном обзоре.
Когда требуется техобслуживание, система управления роботом указывает на это с помощью сообщения:
За месяц до необходимого техобслуживания выдается соответствующее сообщение. Данное сообщение можно квитировать.
По истечении месяца система управления роботом выдает сообщение о необходимости техобслуживания. Данное сообщение нельзя
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
155 / 277
KUKA System Software 8.3
квитировать. Дополнительно мигает светодиод 4 на пульте системы
контроллеров (= первый светодиод слева в нижнем ряду).
Только после протоколирования соответствующей работы по техоб
служиванию система управления роботом удаляет сообщение, и светодиод перестает мигать.
Система управления варианта «KR C4 compact» не имеет пульта
системы контроллеров и мигающего указателя для индикации не
обходимого техобслуживания.
Сроки необходимого техобслуживания ориентируются на интервалы техобслуживания в договорах на обслуживание, которые предлагает компания KUKA. Интервалы начинают отсчитываться с момента первого
ввода системы управления роботом в эксплуатацию. При этом считается
время работы робота.
5.10.1
Протоколирование техобслуживания
Описание
В один день невозможно запротоколировать несколько работ по техобслуживанию одного типа.
После сохранения данных в памяти их больше нельзя изменить.
Условие
Порядок
действий
1. В главном меню выбрать пункт Ввод в эксплуатацию > Сервисное
обслуживание > Руководство по техобслуживанию. Открывается
окно Руководство по техобслуживанию.
Выбрана группа пользователей «Эксперты»
2. Выбрать вкладку Ввод техобслуживания и ввести данные о техобслуживании. Необходимо заполнить все поля.
3. Нажать кнопку Сохранить. Отображается контрольный запрос.
4. Если все введенные данные верны, в окне контрольного запроса нажать кнопку Да.
Теперь данные сохранены. При переходе во вкладку Обзор техобслуживания в ней отображается информация о данном техобслуживании.
156 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
5 Первый и повторный ввод в эксплуатац...
Рис. 5-38: Ввод техобслуживания
Поз.
Описание
1
Выбрать тип выполненного техобслуживания.
2
Вписать, кто выполнил техобслуживание.
3
Для работ по техобслуживанию, которые выполняются и протоколируются персоналом компании KUKA: ввести номер заказа.
Для других работ по техобслуживанию: ввести произвольный
номер.
4
Типы техобслуживания
Вписать комментарий.
По умолчанию возможен выбор следующих типов техобслуживания:
Базовая инспекция
Техобслуживание центральной руки
Техобслуживание основных осей
Измерение зазора редуктора
Малое обслуживание электрокомпонентов
Большое обслуживание электрокомпонентов
Сохранение данных на запасном жестком диске
Ремонт
Данные типы техобслуживания соответствуют типам техобслуживания в
договорах на обслуживание, которые предлагает компания KUKA. В зависимости от используемых опций (например, линейная ось или технологические пакеты) на выбор могут предлагаться и другие типы
техобслуживания.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
157 / 277
KUKA System Software 8.3
5.10.2
Индикация протокола техобслуживания
Описание
Запротоколированные работы по техобслуживанию можно просмотреть
в специальном обзоре. Если выполняется обновление системного программного обеспечения KUKA, то данный обзор сохраняется.
При выполнении архивирования всегда одновременно архивируются запротоколированные работы по техобслуживанию. При восстановлении
данных, когда в системе управления роботом уже были запротоколированы другие работы по техобслуживанию, они не переписываются, а дополняются восстановленными протоколами.
Порядок
действий
1. В главном меню выбрать пункт Ввод в эксплуатацию > Сервисное
обслуживание > Руководство по техобслуживанию. Открывается
окно Руководство по техобслуживанию.
2. Выбрать вкладку Обзор техобслуживания.
Рис. 5-39: Обзор техобслуживания
158 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
6 Управление программами и проектами
6
У
Управление программами и проектами
6.1
Создание новой программы
л
Описание
В группе «Пользователи» нельзя выбрать маску. По умолчанию создается программа типа «Модуль».
Условие
Порядок
действий
1. Выделить папку в структуре папок, в которой следует создать новую
программу, например, папку Program. (Новые программы можно создавать не во всех папках).
На дисплее появляется навигатор.
2. Нажать кнопку Новая.
3. Только для группы пользователей «Эксперты»:
открывается окно Выбор маски. Выделить нужную маску и нажать
кнопку OK для подтверждения.
4. Ввести имя новой программы и нажать кнопку OK для подтверждения.
6.2
Создание новой папки
Условие
На дисплее появляется навигатор.
Порядок
действий
1. Выделить папку в структуре папок, в которой следует создать новую
папку, например, папку R1.
Новые папки можно создать не во всех папках. В группах пользователей «Пользователи» и «Операторы» новые папки можно создать
только в папке R1.
2. Нажать кнопку Новая.
3. Ввести имя новой папки и нажать кнопку OK.
6.3
Переименование файла или папки
Условие
На дисплее появляется навигатор.
Порядок
действий
1. В структуре каталогов выделить папку, в которой находится нужный
файл или подлежащая переименованию папка.
2. Выделить файл или папку в списке.
3. Правка Выбрать > Переименовать.
4. Вместо существующего имени файла написать новое имя файла и
нажать OK для подтверждения.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
159 / 277
KUKA System Software 8.3
6.4
Менеджер файловНавигатор
Обзор
Рис. 6-1: Навигатор
Описание
1
Строка заголовка
3
Список файлов
2
Структура каталогов
4
Строка состояния
В навигаторе пользователь осуществляет административное управление программами и системными файлами.
Строка заголовка
Левая область: отображается выбранный фильтр.
(>>> 6.4.1 "Выбор фильтра" Страница 161)
Правая область: отображается каталог или диск, выделенный в
структуре каталогов.
Структура каталогов
Обзор каталогов и дисков. То, какие каталоги и диски отображаются, зависит от группы пользователя и от конфигурации.
Список файлов
Отображается содержимое каталога или диска, выделенного в структуре
каталогов. Форма отображения программ зависит от выбранного фильтра.
Список файлов имеет следующие столбцы:
160 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
6 Управление программами и проектами
Столбец
Описание
Имя
Имя каталога или файла
Расширение
Расширение файла
Этот столбец в группе «Пользователи» не отображается.
Комментарий
Комментарий
Атрибуты
Атрибуты операционной и базовой системы
Этот столбец в группе «Пользователи» не отображается.
Размер
Размер файла в килобайтах
Этот столбец в группе «Пользователи» не отображается.
#
Количество изменений файла
Изменено
Дата и время последнего изменения
Создан
Дата и время создания
Этот столбец в группе «Пользователи» не отображается.
Строка состояния
Строка состояния может содержать следующую информацию:
6.4.1
выделенные объекты;
выполняемые операции;
диалоги пользователя;
запросы вводов пользователя;
контрольные запросы.
Выбор фильтра
Описание
Эта функция в группе «Пользователь» отсутствует.
Фильтр задает, как программы должны отображаться в списке файлов.
Для выбора имеются следующие фильтры:
Деталь
Программы отображаются в виде SRC- и DAT-файлов. (Настройка по
умолчанию)
Модули
Программы отображаются как модули.
Условие
Порядок
действий
1. Выбрать последовательность меню Правка > Фильтр.
Выбрана группа пользователей «Эксперты»
2. В левой области навигатора выделить нужный фильтр.
3. Для подтверждения нажать OK.
6.5
Обзор
Выбор или открытие программы
Программу можно выбрать или открыть. В таком случае вместо навигатора отобразится редактор с программой.
(>>> 6.5.1 "Выбор и отмена программы" Страница 162)
(>>> 6.5.2 "Открытие программы" Страница 163)
Между программой и навигатором можно переключаться.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
161 / 277
KUKA System Software 8.3
(>>> 6.5.3 "Переключение между навигатором и программой" Страница 164)
Отличия
Программа выбрана:
на дисплее появляется указатель записи;
программу можно запустить;
программу можно ограниченно редактировать;
Выбранные программы особенно подходят для редактирования группой «Пользователи».
Пример: не допускаются многострочные команды KRL (например,
LOOP – ENDLOOP).
изменения при отмене принимаются без предупредительного запроса. Если были запрограммированы недопустимые изменения, отображается сообщение об ошибке.
Программа открыта:
программу нельзя запустить;
программу можно редактировать;
Открытые программы особенно подходят для редактирования группой пользователей «Эксперты».
6.5.1
при закрытии появляется предупредительный запрос. Изменения
можно сохранять или отклонять.
Выбор и отмена программы
Если выбранная программа редактируется в группе пользовате
лей «Эксперты», то после этого курсор следует вывести из редактируемой строки и установить в любой другой строке!
Только таким образом можно обеспечить сохранение внесенного изменения после отмены выбора программы.
Условие
Порядок
действий
1. Выделить программу в навигаторе и нажать кнопку Выбрать.
Режим работы T1, T2 или AUT
Программа отображается в редакторе. При этом не имеет значения,
что было выделено: модуль, файл SRC или файл DAT. В редакторе
всегда отображается файл SRC.
2. Запустить или отредактировать программу.
3. Снова аннулировать выбор программы:
выбрать Правка > аннулировать программу.
Или: на линейке состояний коснуться индикации Интерпретатор робота. Открывается окно. Выбрать пункт Отмена выбора программы.
Изменения при отмене принимаются без предупредительного за
проса!
Если программа выполняется, то прежде, чем ее снова можно аннулировать, ее нужно остановить.
Описание
Если выбрана какая-либо программа, то это показано на индикации состояния Интерпретатор робота.
(>>> 7.6 "Индикация состояния интерпретатора робота" Страница 184)
162 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
6 Управление программами и проектами
Рис. 6-2: Программа выбрана.
6.5.2
1
Указатель записи
2
Курсор
3
Путь к программе и имя файла
4
Положение курсора в программе
5
Символ указывает на то, что программа выбрана.
Открытие программы
Условие
Режим работы T1, T2 или AUT
В режиме работы AUT EXT программу можно открыть, но нельзя редактировать.
Порядок
действий
1. Выделить программу в навигаторе и нажать кнопку Открыть. Программа отобразится в редакторе.
Если был выделен модуль, в редакторе отобразится файл SRC. Если
был выделен файл SRC или DAT, в редакторе отобразится соответствующий файл.
2. Отредактировать программу.
3. Закрыть программу.
4. Подтвердить изменения, ответив Да на запрос.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
163 / 277
KUKA System Software 8.3
Описание
Рис. 6-3: Программа открыта
6.5.3
1
Курсор
2
Путь к программе и имя файла
3
Положение курсора в программе
Переключение между навигатором и программой
Описание
После того как выбрана или открыта программа, можно снова отобразить
навигатор без отмены или закрытия программы. Затем можно снова вернуться к программе.
Порядок
действий
Программа выбрана:
переключение из программы в навигатор: выбрать последовательность меню Правка > Навигатор.
переключение из навигатора в программу: нажать ПРОГРАММА.
Программа открыта:
переключение из программы в навигатор: выбрать последовательность меню Правка > Навигатор.
переключение из навигатора в программу: нажать РЕДАКТОР.
Чтобы были доступны указанные меню и кнопки, сначала следует прекратить работу запущенных или остановленных программ.
6.6
Структура программы KRL
1
DEF my_program( )
2
INI
3
4
PTP HOME
Vel= 100 % DEFAULT
...
8
LIN point_5 CONT Vel= 2 m/s CPDAT1 Tool[3] Base[4]
...
164 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
6 Управление программами и проектами
14 PTP point_1 CONT Vel= 100 % PDAT1 Tool[3] Base[4]
...
20 PTP HOME
Vel= 100 % DEFAULT
21
22 END
Строка
Описание
1
Строка DEF показывает имя программы. Если программа
представляет собой функцию, строка DEF начинается с
«DEFFCT» и содержит также другие сведения. Строка
DEF может быть отображена или затемнена.
(>>> 6.7.1 "Выделение/затемнение строки DEF" Страница 166)
2
Строка INI содержит инициализации для внутренних
переменных и параметров.
4
Позиция HOME
(>>> 6.6.1 "Позиция HOME" Страница 165)
8
Движение LIN
(>>> 9.2.3 "Программирование движения LIN" Страница 216)
14
Движение РТР
(>>> 9.2.1 "Программирование движения РТР" Страница 215)
20
Позиция HOME
22
Строка END – это последняя строка в каждой программе.
Если программа является функцией, строка END имеет
вид «ENDFCT». Удалять строку END запрещено!
Первая команда движения в программе KRL должна содержать однозначное определение исходного положения. Это условие выполняется в
позиции HOME, которая введена в систему управления роботом по умолчанию.
Если первой командой движения не является позиция Default-HOME или
она была изменена, необходимо выполнить следующие команды:
полностью команду PTP типа POS или E6POS;
полностью команду PTP типа AXIS или E6AXIS.
«Полностью» означает, что должны быть указаны все компоненты целевой точки.
Изменение позиции HOME оказывает влияние на
все программы, в которых она используется.
Следствием могут являться травмы и материальный ущерб.
В программах, которые могут использоваться исключительно как подпрограммы, в качестве первой команды движения могут быть использованы
также другие команды движения.
6.6.1
Позиция HOME
Позиция HOME действительна для всех программ. Она, как правило, используется в качестве первой и последней позиции в программе, так как
она однозначно определена и некритична.
Позиция HOME по умолчанию сохранена в системе управления роботом
со следующими значениями:
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
165 / 277
KUKA System Software 8.3
Ось
A1
A2
A3
A4
A5
A6
Поз.
0°
- 90°
+ 90°
0°
0°
0°
Возможно заучить также другие позиции HOME. Позиция HOME должна
удовлетворять следующим условиям:
удобная исходная позиция для выполнения программы;
удобная позиция останова. Например, остановленный робот не должен являться препятствием.
Изменение позиции HOME оказывает влияние на
все программы, в которых она используется.
Следствием могут являться травмы и материальный ущерб.
6.7
Выделение/затемнение частей программы
6.7.1
Выделение/затемнение строки DEF
Описание
Строка DEF затемнена по умолчанию. Объявления в программе возможны, только если отображается строка DEF.
Строка DEF отдельной командой отображается или затемняется при
каждом открывании и выборе программ. Если включен детальный вид, то
строка DEF видна и активировать ее отображение отдельной командой
не требуется.
Необходимое
условие
Группа пользователей "Эксперт"
Программа выбрана или открыта.
Порядок
действий
1. Выбрать последовательность меню Правка > Вид. В подпункте
Строка DEF сигнализируется актуальное состояние:
Без галочки: строка DEF затемнена.
С галочкой: строка DEF выделена.
2. Чтобы изменить это состояние, коснуться пункта меню Строка DEF.
После этого меню автоматически закрывается.
6.7.2
Вывод детального вида на дисплей
Описание
Детальный вид выключается по умолчанию, для того чтобы иметь полный обзор программы. Если детальный вид включается, скрытые строки
программы выделяются, например, строки FOLD и ENDFOLD, а также
строка DEF.
Детальный вид включается и выключается отдельно для открытых и для
выбранных программ.
166 / 277
Условие
Порядок
действий
1. Выбрать последовательность меню Правка > Вид. В подпункте
ASCII-режим сигнализируется актуальное состояние:
Выбрана группа пользователей «Эксперты»
Без галочки: детальный вид выключен.
С галочкой: детальный вид включен.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
6 Управление программами и проектами
2. Чтобы изменить это состояние, коснуться пункта меню ASCII-режим.
После этого меню автоматически закрывается.
6.7.3
Включение/выключение переноса строки
Описание
Если одна из строк шире, чем программное окно, строка переносится по
умолчанию. Перенесенная часть строки не имеет номера строки и отмечена черной L-образной стрелкой.
Рис. 6-4: Перенос строки
Перенос строки можно выключить. Если одна из строк шире, чем программное окно, то строка не отображается полностью. Под программным
окном появляется полоса прокрутки.
Перенос строки включается и выключается отдельно для открытых и для
выбранных программ.
Необходимое
условие
Группа пользователей "Эксперт"
Программа выбрана или открыта.
Порядок
действий
1. Выбрать последовательность меню Правка > Вид. В подпункте Перенос строки сигнализируется актуальное состояние:
Без галочки: перенос строки выключен.
С галочкой: перенос строки включен.
2. Чтобы изменить это состояние, коснуться пункта меню Перенос
строки.
После этого меню автоматически закрывается.
6.8
Обзор
Редактирование программ
Редактирование работающей в данный момент программы невозможно.
Редактирование программ в режиме работы AUT EXT невозможно.
Если выбранная программа редактируется в группе пользовате
лей «Эксперты», то после этого курсор следует вывести из редактируемой строки и установить в любой другой строке!
Только таким образом можно обеспечить сохранение внесенного изменения после отмены выбора программы.
Операция
Возможна в группе пользователей ...?
Ввод комментария
или штампа
Пользователь: да
Стирание строки
Пользователь: да
Эксперт: да
Эксперт: да
Создание формуляров
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
Пользователь: нет
Эксперт: да
167 / 277
KUKA System Software 8.3
Операция
Возможна в группе пользователей ...?
Копирование
Пользователь: нет
Эксперт: да
Вставка
Пользователь: нет
Вставка пустых строк
(нажимать клавишу
вводу)
Пользователь: нет
Вырезание
Пользователь: нет
Эксперт: да
Эксперт: да
Эксперт: да
Поиск
Пользователь: да
Эксперт: да
Доступно для всех групп пользователей при
открытой программе, в том числе в режиме
работы AUT EXT.
Замена
Пользователь: нет
Эксперт: да (программа открыта, не
выбрана)
Программирование
со встроенными формулярами
Программирование
KRL
Пользователь: да
Эксперт: да
Пользователь: возможно с ограничениями.
Не допускаются многострочные команды KRL
(например, LOOP … ENDLOOP).
Эксперт: да
6.8.1
Ввод комментария или штампа
Условие
Порядок
действий
Программа выбрана или открыта.
Выбран режим работы T1.
1. Выделить строку, после которой должен быть вставлен комментарий
или штамп.
2. Выбрать последовательность меню Команды > Комментарий >
Нормальный или Штамп.
3. Ввести нужные данные. Если ранее уже были добавлены комментарий или штамп, то во встроенном формуляре будут указаны эти же
данные.
При вводе комментария можно очистить поле с помощью кнопки
Новый текст, чтобы ввести новый текст.
При установке штампа можно изменить системное время с помощью кнопки Новое время, а также очистить поле Имя с помощью
кнопки Новое имя.
4. Сохранить данные, нажав кнопку Команда OK.
Описание
комментария
Рис. 6-5: Встроенный формуляр комментария
168 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
6 Управление программами и проектами
Поз.
Описание
1
Описание
штампа
Произвольный текст
Штамп представляет собой комментарий, к которому добавлены системная дата, время и идентификатор пользователя.
Рис. 6-6: Встроенный формуляр штампа
Поз.
6.8.2
Описание
1
Системная дата (не редактируется)
2
Системное время
3
Имя или идентификатор пользователя
4
Произвольный текст
Удаление программных строк
Удаленные строки восстановить невозможно!
Описание
Если удаляется программная строка, содержащая команду движения, то
имя и координаты точки остаются сохраненными в файле DAT. Эту точку
можно использовать в других командах движения и не нужно заучивать
снова.
Условие
Программа выбрана или открыта.
Выбран режим работы T1.
Порядок
действий
1. Выделить строку, которую следует удалить. (Эта строка не должна
быть выделена каким-либо цветом. Достаточно, чтобы курсор находился в пределах этой строки).
Если необходимо удлить несколько последовательных строк: провести пальцем или стилусом по нужной области. (Эта область должна выделиться каким-либо цветом).
2. Выбрать последовательность меню Правка > Удалить.
3. Подтвердить процедуру, ответив Да на контрольный запрос.
6.8.3
Другие функции редактирования
С помощью пункта Правка можно вызвать следующие функции для обработки программ:
Копировать
Условие:
Программа выбрана или открыта.
Выбрана группа пользователей «Эксперты».
Выбран режим работы T1.
Вставить
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
169 / 277
KUKA System Software 8.3
Условие:
Программа выбрана или открыта.
Выбрана группа пользователей «Эксперты».
Выбран режим работы T1.
Вырезать
Условие:
Программа выбрана или открыта.
Выбрана группа пользователей «Эксперты».
Выбран режим работы T1.
Искать
Условие:
Программа выбрана или открыта.
Заменить
Условие:
6.9
Программа открыта
Выбрана группа пользователей «Эксперты».
Выбран режим работы T1.
Распечатка программы
Порядок
действий
1. Выделить программу в навигаторе. Также можно выделить несколько
программ.
2. Выбрать последовательность меню Правка > Печать.
6.10
Архивирование и восстановление данных
6.10.1
Обзор архивирования
Папки назначения
Пункты меню
Архивирование данных можно выполнить в следующие места назначения:
накопитель USB на пульте smartPAD или в системе управления роботом;
сеть.
Для выбора доступны следующие пункты меню:
(«*.*» означает: все файлы и подкаталоги.)
170 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
6 Управление программами и проектами
Пункт меню
Архивирование каталогов/файлов
Все
KRC:\*.*
C:\KRC\Roboter\Config\User\*.*
C:\KRC\Roboter\Config\System\Common\Mada\*.*
C:\KRC\Roboter\Init\*.*
C:\KRC\Roboter\lr_Spec\*.*
C:\KRC\Roboter\Template\*.*
C:\KRC\Roboter\Rdc\*.*
C:\KRC\User\*.*
C:\KRC\Roboter\log\Mastery.log
Другие отдельные данные Log
KRC:\R1\Program\*.*
KRC:\R1\System\*.*
KRC:\R1\cell*.*
KRC:\Steu\$config*.*
KRC:\R1\Mada\*.*
KRC:\R1\System\*.*
KRC:\R1\TP\*.*
KRC:\Steu\Mada\*.*
C:\KRC\Roboter\Config\User\*.*
C:\KRC\Roboter\Config\System\Common\Mada\*.*
C:\KRC\Roboter\Init\*.*
C:\KRC\Roboter\lr_Spec\*.*
C:\KRC\Roboter\Template\*.*
C:\KRC\Roboter\Rdc\*.*
C:\KRC\User\*.*
C:\KRC\Roboter\log\*.*
Прикладные
программы
Cистемные
данные
Log данные
Кроме: Poslog.xsl, а также файлов с расширением DMP
Диагностика
Krc
Другие отдельные данные Log
Если компания KUKA Roboter GmbH должна проанализировать какую-либо ошибку, то с помощью
этого пункта меню можно поместить нужные данные в архив, чтобы компания KUKA могла получить
к ним доступ.
Для пакета данных автоматически создается скриншот актуального вида smartHMI. Поэтому перед
запуском процесса необходимо вывести в smartHMI
относящуюся к ошибке информацию: например,
расширить окно сообщений или открыть протокол.
Какую информацию имеет смысл выводить, зависит от конкретного случая.
Кроме того, с помощью пункта Файл > Архивировать можно поместить эти данные в архив другим
способом.
(>>> 6.10.6 "Автоматическое архивирование данных для анализа ошибок (KrcDiag)" Страница 174)
Если архивирование производится через пункт меню Все и какой-либо
архив уже существует, происходит перезапись имеющегося архива.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
171 / 277
KUKA System Software 8.3
Если архивирование осуществляется через иной пункт меню, отличный
от Все или Диагностика Krc, и архив уже существует, то система управления роботом сопоставляет имя робота с именем архива. Если имена
различаются, появляется контрольный запрос.
Если архивирование данных выполняется с помощью пункта Диагностика Krc несколько раз, то можно создать не более 10 архивов. Следующие
архивы перезаписывают самый старый из имеющихся архивов.
Кроме того, можно выполнить архивирование журнала.
(>>> 6.10.4 "Архивирование журнала" Страница 173)
6.10.2
Архивирование данных на накопитель USB
Описание
С помощью этих действий на накопителе можно создать ZIP-файл. По
умолчанию для этого файла указывается имя, соответствующее имени
робота. Однако в меню Данные робота можно ввести собственное имя
для этого файла.
(>>> 4.16.12 "Показ/обработка данных робота" Страница 91)
В навигаторе архив отображается в каталоге ARCHIVE:\. Помимо накопителя данные автоматически архивируются на диск D:\. Здесь создается
файл INTERN.ZIP.
Особый случай при выборе пункта Диагностика Krc:
При выборе этого пункта меню на накопителе создается каталог
KRCDiag. В нем содержится ZIP-файл. Кроме того, этот ZIP-файл автоматически сохраняется в каталоге C:\KUKA\KRCDiag.
Следует использовать накопитель USB без возможности загрузки.
Рекомендуется использовать USB-накопитель KUKA без возможности
загрузки. Если используется накопитель другого производителя, возможна потеря данных.
Порядок
действий
1. Вставить накопитель USB (в пульт smartPAD или в шкаф).
2. В главном меню выбрать пункты Файл > Архивировать > USB (KCP)
или USB (шкаф), а затем выбрать требуемый подпункт.
3. Подтвердить процедуру, ответив Да на контрольный запрос. Создается архив.
Когда архивирование завершено, на экране появляется окно сообщений.
Особый случай при выборе пункта Диагностика Krc: если архивирование производится через этот пункт меню, то о завершении архивирования сообщается в отдельном окне. Затем окно самостоятельно
закрывается.
4. Теперь можно извлечь накопитель.
6.10.3
Архивирование данных в сети
Описание
С помощью описанных действий можно создать ZIP-файл по определенному сетевому пути. По умолчанию для этого файла указывается имя,
соответствующее имени робота. Однако в меню Ввод в эксплуатацию
> Данные о роботе можно ввести собственное имя для этого файла.
Сетевой путь, по которому выполняется архивирование, следует установить в окне Данные о роботе. Если для возможности архивирования по
данному пути необходимо имя пользователя и пароль, их можно ввести
здесь же.
172 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
6 Управление программами и проектами
(>>> 4.16.12 "Показ/обработка данных робота" Страница 91)
В навигаторе архив отображается в каталоге ARCHIVE:\. Помимо указанного сетевого пути данные автоматически архивируются на диск D:\.
Здесь создается файл INTERN.ZIP.
Особый случай при выборе пункта Диагностика Krc:
При выборе этого пункта меню по сетевому пути создается каталог
KRCDiag. В нем содержится ZIP-файл. Кроме того, этот ZIP-файл автоматически сохраняется в каталоге C:\KUKA\KRCDiag.
Условие
Порядок
действий
1. В главном меню выбрать пункт Файл > Архивировать > Сеть и затем выбрать нужный подпункт.
Установлен сетевой путь, по которому выполняется архивирование.
2. Подтвердить процедуру, ответив Да на запрос. Будет создан архив.
На экране появится окно сообщений, когда архивирование будет завершено. Особый случай при выборе пункта Диагностика Krc: если
архивирование производится через этот пункт меню, в отдельном
окне будет показано, что архивирование завершено. После этого
окно самостоятельно закроется.
6.10.4
Архивирование журнала
Описание
В качестве архива в папке C:\KRC\ROBOTER\LOG создается файл
Logbuch.txt.
Порядок
действий
6.10.5
В главном меню выбрать пункт Файл > Архивировать > Протокол .
Будет создан архив. На экране появится окно сообщений, когда архивирование будет завершено.
Восстановление данных
Описание
В KSS 8.3 разрешается загружать исключительно
архивы KSS 8.3. При загрузке других архивов возможны перечисленные ниже последствия:
сообщения об ошибках;
неработоспособность системы управления роботом;
травмирование персонала и материальный ущерб.
При восстановлении доступны следующие пункты меню:
Все
Прикладные программы
Cистемные данные
Если версия архивируемых файлов не совпадает с версией файлов,
имеющихся в системе, при их восстановлении появится сообщение об
ошибке.
Если версия технологического пакета не совпадает с установленной версией, также выдается сообщение об ошибке.
Условие
Если восстановление данных производится с накопителя USB: подключен накопитель USB с архивом.
Этот накопитель можно подключить к smartPAD или к системе управления роботом.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
173 / 277
KUKA System Software 8.3
Следует использовать накопитель USB без возможности загрузки.
Рекомендуется использовать USB-накопитель KUKA без возможности
загрузки. Если используется накопитель другого производителя, возможна потеря данных.
Порядок
действий
1. В главном меню выбрать пункты Файл > Восстановить, а затем выбрать требуемые подпункты.
2. Подтвердить процедуру, ответив Да на контрольный запрос. Файлы
будут восстановлены в системе управления роботом из архива. После окончания восстановления появляется соответствующее сообщение.
3. Если восстановление было выполннено с накопителя USB: теперь
можно извлечь накопитель.
4. Повторно запустить систему управления роботом.
6.10.6
Автоматическое архивирование данных для анализа ошибок (KrcDiag)
Описание
Если компания KUKA Roboter GmbH должна проанализировать какуюлибо ошибку, то таким образом можно поместить нужные данные в архив, чтобы компания KUKA могла получить к ним доступ. С помощью этих
действий в папке C:\KUKA\KRCDiag можно создать ZIP-файл. В нем содержатся данные, которые потребуются компании KUKA Roboter GmbH
для анализа ошибок. К этим данным относится информация о системных
ресурсах, снимки экрана и многое другое.
Подготовка
Для пакета данных автоматически создается скриншот актуального вида
smartHMI.
Поэтому перед запуском процесса необходимо, если это возможно,
вывести в smartHMI относящуюся к ошибке информацию: например,
расширить окно сообщений или открыть протокол.
Какую информацию имеет смысл выводить, зависит от конкретного
случая.
Порядок
действий при
выборе пункта
«Диагностика»
Порядок
действий с
помощью
пульта smartPAD
В этом порядке действий используются не пункты меню, а кнопки на
пульте smartPAD. Поэтому его можно использовать в том случае, если
интерфейс smartHMI недоступен, например, из-за проблем с операционной системой Windows.
В главном меню выбрать пункт Диагностика > KrcDiag.
Данные помещаются в архив. Прогресс выполнения отображается в
соответствующем окне. После завершения процесса об этом сообщается в этом же окне. После этого окно самостоятельно закрывается.
Условие:
пульт smartPAD подключен к системе управления роботом;
система управления роботом включена.
Кнопки следует нажимать в течение 2 секунд. Индикация главного меню и клавиатуры в интерфейсе smartHMI не имеет значения.
1. Нажать и удерживать кнопку вызова главного меню.
2. Дважды нажать кнопку вызова клавиатуры.
3. Отпустить кнопку вызова главного меню.
174 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
6 Управление программами и проектами
Данные будут помещены в архив. Прогресс выполнения будет показан в соответствующем окне. После завершения этого процесса это
будет показано в этом же окне. После этого окно самостоятельно закроется.
Порядок
действий при
выборе пункта
«Архивирование»
Кроме того, данные можно поместить в архив с помощью команды Файл
> Архивировать > [...]. При этом можно сохранить архив на USB-накопителе или по сетевому пути.
(>>> 6.10 "Архивирование и восстановление данных" Страница 170)
6.11
Управление проектами
6.11.1
Окно Управление проектами
Обзор
Окно Управление проектами можно открыть с помощью символа
WorkVisual на интерфейсе smartHMI.
Кроме обычных проектов, окно Управление проектами содержит следующие специальные проекты:
Проект
Описание
Исходный проект
Исходный проект существует всегда. Пользователь
не может изменить его. Он содержит информацию о
состоянии системы управления роботом на момент
поставки.
Базовый проект
Пользователь может сохранить активный проект
как базовый. Эта возможность обычно применяется, когда требуется сохранить информацию о
работоспособном, проверенном состоянии проекта.
Базовый проект нельзя активировать, а можно
только копировать. Пользователь не может изменить его, однако путем сохранения можно заменить
один базовый проект другим (после подтверждения
предупредительного запроса).
При активации проекта, который содержит не все
файлы конфигурации, недостающие сведения
извлекаются из базового проекта. Это может быть,
например, при активации проекта из более ранней
версии WorkVisual. (К файлам конфигурации относятся файлы параметров машины, файлы конфигурации системы безопасности и многие другие.)
При обновлении KSS/VSS исходный и базовый проекты заменяются копиями активного проекта.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
175 / 277
KUKA System Software 8.3
Описание
Рис. 6-7: Окно управления проектом
Поз.
Описание
1
Отображение исходного проекта.
2
Восстановление исходного состояния системы управления
роботом.
Доступно только для группы пользователей «Эксперты» и выше.
3
Отображение базового проекта.
4
Создание копии базового проекта.
Доступно только для группы пользователей «Эксперты» и выше.
5
Отображение активного проекта.
6
Сохранение активного проекта как базового. Активный проект
остается активным.
Доступно только для группы пользователей «Эксперты» и выше.
7
Создание закрепленной копии активного проекта.
Доступно только для группы пользователей «Эксперты» и выше.
8
Список неактивных проектов (кроме базового и исходного проекта)
При всех операциях копирования открывается окно, в котором можно
ввести имя и описание копии.
Кнопки
176 / 277
В распоряжении имеются следующие кнопки:
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
6 Управление программами и проектами
Экранная
кнопка
Описание
Активировать
Активация выделенного проекта.
Если выделенный проект закреплен: создание
копии отмеченного проекта (можно активировать
только копию закрепленного проекта, но не сам
проект). Затем пользователь может решить, активировать ли копию или активным должен оставаться
прежний проект.
Доступно только для группы пользователей «Эксперты» и выше.
Закрепление
Доступно, только если выделен незакрепленный
проект. Доступно только для группы пользователей
«Эксперт» и выше.
Отстыковка
Отмена закрепления проекта.
Доступно, если отмечен закрепленный проект.
Доступно только для группы пользователей «Эксперты» и выше.
Копировать
Копирование выделенного проекта.
Доступно только для группы пользователей «Эксперты» и выше.
Удалить
Удаление выделенного проекта.
Доступно, если выделен неактивный и не закрепленный проект. Доступно только для группы пользователей «Эксперты» и выше.
Oбработка
Открывает окно, в котором можно изменить имя и/
или описание выделенного проекта.
Доступно, только если выделен незакрепленный
проект. Доступно только для группы пользователей
«Эксперты» и выше.
Актуализация
6.11.2
Обновление списка проектов. Таким способом
можно просмотреть проекты, которые были переданы в систему управления роботом после открытия этого окна.
Резервное копирование проектов, пакетов опций и данных RDC
Проекты
Пакеты опций
По умолчанию сохраняются следующие проекты:
Активный проект
Исходный проект
Базовый проект
Пакеты опций сохраняются при соблюдении следующих условий:
В пакете опций присутствует файл КОР.
Пакет опций изначально был добавлен к проекту в WorkVisual. На
данный момент проект активирован в системе управления роботом.
Или:
Пакет опций был инсталлирован в активном проекте посредством
Ввод в эксплуатацию > Дополнительное ПО. Пакет опций при инсталляции был предоставлен как единственный KOP-файл. (Не как
структура каталогов!)
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
177 / 277
KUKA System Software 8.3
Данные RDC
При резервном сохранении всегда создается один файл [Серийный номер
робота].RDC. В нем содержатся файлы CAL, MAM и PID. Не все файлы
всегда имеются в наличии (в зависимости от робота).
Условие
В данный момент не выполняется сохранение или восстановление.
Порядок
действий
В главном меню выбрать пункты Файл > Менеджер резервного копирования, а затем один из следующих пунктов меню:
Сохранить
Целевым каталогом является D:\ProjectBackup, если не был задан другой каталог. Если путь еще не указан, он создается автоматически.
Или Сохранить в...
Здесь можно выбрать целевой каталог. Он применяется только
для данного сохранения.
Выполняется сохранение. Посредством сообщений система управления
роботом сигнализирует успешное сохранение. Для каждого проекта и
каждого пакета опций она выдает сообщение, а также сообщение по данным RDC.
Однако пакет опций не сохраняется, если в целевом каталоге уже присутствует такой же пакет опций.
6.11.3
Восстановление проектов, пакетов опций и данных RDC
Подробная информация о восстановлении приведена в инструк
ции по эксплуатации и программированию системных интеграто
ров.
Проекты и пакеты опций, с одной стороны, и данные RDC, с другой стороны, могут восстанавливаться только отдельно друг от друга.
Проекты, пакеты
опций
Данные RDC
178 / 277
Для выполнения восстановления специальные условия не требуются.
Однако после восстановления, как правило, необходимо инсталлировать пакет опций и/или активировать проект. Для этого пользователь
должен быть в группе пользователей «Эксперты» или выше.
Для этого пользователь должен быть в группе пользователей «Эксперты» или выше.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
7 Выполнение программы
7
Выполнение программы
л
7.1
Выбор вида выполнения программы
Порядок
действий
1. Коснуться индикации состояния Вид выполнения программы. Открывается окно Вид выполнения программы.
2. Выбрать нужный вид выполнения программы.
(>>> 7.2 "Виды выполнения программы" Страница 179)
Окно закроется, и выбранный вид выполнения программы будет принят.
7.2
Виды выполнения программы
Обозначение
Go
#GO
Перемещение
#MSTEP
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
Индикац
ия
состоян
ия
Описание
Программа выполняется без останова до ее конца.
Программа выполняется с остановом в каждой точке, включая вспомогательные точки и точки в
сегментах Spline. Для каждой точки
необходимо заново нажимать клавишу пуска. Программа выполняется
без предварительной записи.
179 / 277
KUKA System Software 8.3
Обозначение
Отдельный шаг
#ISTEP
Индикац
ия
состоян
ия
Описание
Программа выполняется с остановом после каждой программной
строки. Останов также выполняется
после невидимых программных
строк и пробелов. Для каждой
строки необходимо заново нажимать
клавишу пуска. Программа выполняется без предварительной записи.
Отдельный шаг Доступно только
для группы пользователей «Эксперты».
Назад
#BSTEP
Этот вид выполнения программы
активируется автоматически при
нажатии клавиши обратного пуска.
Клавиша не позволяет активировать какой-либо другой вид выполнения программы.
Процесс происходит как для функции Перемещение, со следующим
исключением: движения CIRC в
обратном направлении выполняются так же, как при последнем
перемещении вперед. Т. е. если при
перемещении вперед во вспомогательной точке не выполнялся останов, то и при перемещении назад он
тоже не выполняется.
Для движений SCIRC данное исключение не действует. Здесь при перемещении назад всегда выполняется
останов во вспомогательной точке.
7.3
Предварительное число
Предварительное число представляет собой количество строк движения, которые система управления робота заранее рассчитывает и планирует при выполнении программы. Реальное количество зависит от
загрузки процессора. Значение по умолчанию – «3». Предварительное
число соотносится с актуальным положением указателя записи. Предварительное число необходимо, в том числе, для расчета движений приближения.
Некоторые команды приводят к останову предварительной процедуры. К
ним относятся команды, влияющие на периферию, например, команды
OUT.
7.4
Обзор
Указатель записи
При выполнении программы указатель записи показывает различную информацию:
180 / 277
какой робот выполняет движение и какой закончил движение;
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
7 Выполнение программы
выполняется ли подвод во вспомогательную точку или в целевую
точку;
направление, в котором робот перемещается при выполнении программы.
Указател
ь
Направлен
ие
Вперед
Описание
Выполняется перемещение к целевой
точке.
Назад
Вперед
Целевая точка была достигнута с точным
остановом.
Назад
Вперед
Происходит перемещение во вспомогательную точку.
Назад
Вперед
Вспомогательная точка была достигнута с
точным остановом.
Назад
Примеры
движения
вперед
Рис. 7-1: Робот перемещается из точки P3 в точку P4
Рис. 7-2: Робот достиг точки P4 с точным остановом
Рис. 7-3: Робот перемещается из точки P5 во вспомогательную точку P6
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
181 / 277
KUKA System Software 8.3
Рис. 7-4: Робот достиг вспомогательной точки P6 с точным остановом
Рис. 7-5: Робот перемещается из вспомогательной точки P6 в точку
P7
Рис. 7-6: Робот достиг точки P7 с точным остановом
Примеры
движения назад
Рис. 7-7: Робот перемещается из точки P8 в точку P7
Рис. 7-8: Робот достиг точки P7 с точным остановом
182 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
7 Выполнение программы
Рис. 7-9: Робот перемещается из точки в P7 во вспомогательную
точку P6
Рис. 7-10: Робот достиг вспомогательной точки P6 с точным остановом
Двойная стрелка
вверх/вниз
Если в программном окне показывается участок, на котором нет указателя записи, отображается двойная стрелка, указывающая на то, в каком
направлении находится указатель.
Рис. 7-11: Указатель записи находится в программе выше
Рис. 7-12: Указатель записи находится ниже в программе.
7.5
Установка коррекции программы (POV)
Описание
Коррекция программы представляет собой значение скорости робота
при выполнении программы. Коррекция программы указывается в процентах от запрограммированной скорости.
В режиме T1 максимальная скорость составляет 250 мм/с независимо от
установленного значения.
Порядок
действий
1. Коснуться индикации состояния POV/HOV. Открывается окно Коррекция.
2. Установить нужную коррекцию программы. Это можно сделать с помощью кнопок «плюс» и «минус» или с помощью регулятора:
кнопки «плюс» и «минус»: значение можно изменить следующими
шагами: 100%, 75%, 50%, 30%, 10%, 3%, 1%;
регулятор: коррекцию можно изменить шагами по 1%.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
183 / 277
KUKA System Software 8.3
3. Повторно коснуться индикации состояния POV/HOV. (Или коснуться
области вне пределов окна).
Окно закроется, и выбранная коррекция будет принята.
В окне Коррекция можно открыть окно Опции ручного метода
с помощью пункта Опции.
Альтернативный порядок
действий
7.6
Значение коррекции также можно установить с помощью клавиши
«плюс» и «минус» справа на пульте smartPAD.
Значение можно изменить следующими шагами: 100%, 75%, 50%, 30%,
10%, 3%, 1%.
Индикация состояния интерпретатора робота
Символ
7.7
Цвет
Описание
Серый
Ни одна из программ не выбрана.
Желтый
Указатель записи стоит в первой строке
выбранной программы.
Зеленый
Программа выбрана и отрабатывается.
Красный
Выбранная и запущенная программа остановлена.
Черный
Указатель записи находится в конце выбранной программы.
Запуск программы вперед (вручную)
Условие
Порядок
действий
Программа выбрана.
Выбран режим работы T1 или T2.
1. Выбрать вид выполнения программы.
2. Держать нажатым переключатель подтверждения и подождать, пока
на линейке состояний не появится индикация «Приводы готовы»:
Рис. 7-13
3. Выполнить ход SAK: нажать клавишу пуска и держать ее нажатой,
пока в окне сообщений не появится «SAK достигнут». Робот останавливается.
184 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
7 Выполнение программы
Перемещение SAK выполняется как движение
LIN или РТР из действительной позиции в целевую. Скорость снижается автоматически. Ход перемещения невозможно с уверенностью предсказать заранее. Наблюдать за движением в
ходе перемещения SAK, чтобы вовремя остановить робот, если возникает риск столкновения.
4. Нажать клавишу пуска и держать ее нажатой.
Программа выполняется в зависимости от вида выполнения с остановами или без них.
Чтобы остановить запущенную вручную программу, отпустить клавишу
пуска.
7.8
Запуск программы вперед (автоматически)
Условие
Порядок
действий
Программа выбрана.
Режим работы Автоматика (не Внешняя автоматика)
1. Выбрать вид выполнения программы Go.
2. Включить приводы.
3. Выполнить ход SAK:
нажать клавишу пуска и держать нажатой, пока в окне сообщений не
появится сообщение «SAK достигнут». Робот останавливается.
Перемещение SAK выполняется как движение
LIN или РТР из действительной позиции в целевую. Скорость снижается автоматически. Ход перемещения невозможно с уверенностью предсказать заранее. Наблюдать за движением в
ходе перемещения SAK, чтобы вовремя остановить робот, если возникает риск столкновения.
4. Нажать клавишу пуска. Программа выполняется.
Чтобы остановить запущенную в автоматическом режиме программу, нажать клавишу останова.
7.9
Выбор записи
Описание
С выбором записи можно запустить программу с любой точки.
Условие
Программа выбрана.
Выбран режим работы T1 или T2.
Порядок
действий
1. Выбрать вид выполнения программы.
2. Выделить запись движения, с которой должна запуститься программа.
3. Нажать кнопку Выбор записи. Указатель записи указывает на запись
движения.
4. Держать нажатым переключатель подтверждения и подождать, пока
на линейке состояний не появится индикация «Приводы готовы»:
5. Выполнить ход SAK: нажать клавишу пуска и держать ее нажатой,
пока в окне сообщений не появится «SAK достигнут». Робот останавливается.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
185 / 277
KUKA System Software 8.3
Перемещение SAK выполняется как движение
LIN или РТР из действительной позиции в целевую. Скорость снижается автоматически. Ход перемещения невозможно с уверенностью предсказать заранее. Наблюдать за движением в
ходе перемещения SAK, чтобы вовремя остановить робот, если возникает риск столкновения.
6. Программу теперь можно запустить вручную или автоматически. При
этом нет необходимости еще раз повторять ход SAK.
7.10
Сброс программы
Описание
Чтобы начать заново прерванную программу, ее необходимо сбросить.
При этом программа возвращается в начальное состояние.
Условие
Программа выбрана.
Порядок
действий
Выбрать последовательность меню Правка > Cброс программы.
Альтернативный порядок
действий
На линейке состояний коснуться индикации Интерпретатор робота.
Открывается окно.
7.11
Выбрать Cброс программы.
Запуск режима внешней автоматики
В режиме внешней автоматики перемещение
SAK не предлагается. Это значит, что робот после запуска выходит на первое запрограммированное положение с запрограммированной (не сниженной) скоростью и там не
останавливается.
Условие
Порядок
действий
Выбран режим работы T1 или T2.
Входы/выходы для внешней автоматики отконфигурированы.
Программа CELL.SRC отконфигурирована.
1. В навигаторе выбрать программу CELL.SRC. (Находится в папке
«R1»).
2. Установить коррекцию программы на 100 %. (Это рекомендуемая настройка. При необходимости можно настроить другое значение).
3. Выполнить ход SAK:
нажать и держать нажатым переключатель подтверждения. Затем
нажать клавишу пуска и держать ее нажатой, пока в окне сообщений
не появится сообщение «SAK достигнут».
Перемещение SAK выполняется как движение
LIN или РТР из действительной позиции в целевую. Скорость снижается автоматически. Ход перемещения невозможно с уверенностью предсказать заранее. Наблюдать за движением в
ходе перемещения SAK, чтобы вовремя остановить робот, если возникает риск столкновения.
4. Выбрать режим работы «Внешняя автоматика».
5. Запустить программу через систему управления верхнего уровня
(ПЛК).
Чтобы остановить запущенную в автоматическом режиме программу, нажать клавишу останова.
186 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
7 Выполнение программы
7.12
Перемещение назад посредством клавиши обратного пуска
Описанные ниже процессы относятся только к перемещениям назад, активируемым клавишей обратного пуска. Они не относятся к другим функциям перемещения назад, например, к движениям назад в рамках
стратегии устранения ошибок в технологических пакетах.
7.12.1
Выполнение движений в обратном направлении
Описание
Перемещение назад часто используется, когда необходимо оптимизировать последовательность движений и в этих целях требуется перенастройка отдельных точек. Пользователь перемещает робот по
траектории назад, пока не будет достигнута подлежащая коррекции точка. После перенастройки данной точки при необходимости пользователь
продолжает движение назад для коррекции других точек.
При движении назад автоматически действует вид выполнения программы #BSTEP.
При движении назад сглаживание или выполнение колебательных движений невозможно. То есть если при движении вперед точки сглаживались или были пройдены с использованием колебаний, то траектория
обратного движения будет отличаться от траектории движения вперед.
Поэтому после обратного запуска роботу может сначала понадобиться
выполнить перемещение SAK, хотя он и не покидал траектории, пройденной в направлении вперед.
Перемещение SAK выполняется как движение
LIN или РТР из действительной позиции в целевую. Скорость снижается автоматически. Ход перемещения невозможно с уверенностью предсказать заранее. Наблюдать за движением в
ходе перемещения SAK, чтобы вовремя остановить робот, если возникает риск столкновения.
Условие
Порядок
действий
Программа выбрана.
Перемещения, которые должны быть выполнены в направлении назад, были уже выполнены в направлении вперед.
Выбран режим работы T1 или T2.
1. Держать нажатым переключатель подтверждения и подождать, пока
на линейке состояний не появится индикация «Приводы готовы»:
2. Нажать и удерживать клавишу обратного пуска.
Если робот уже находится на траектории обратного движения, он
начинает перемещение назад.
Если робот не находится на траектории обратного движения, он
перемещается к данной траектории. Робот достиг траектории,
когда в окне сообщений появляется сообщение «SAK достигнут».
Робот останавливается.
Повторно нажать клавишу обратного пуска. Робот выполняет перемещение назад.
3. Для каждой записи движения необходимо повторно нажимать клавишу обратного пуска.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
187 / 277
KUKA System Software 8.3
7.12.2
Принцип действия и особенности движения в обратном направлении
Принцип
действия
При перемещении вперед система управления роботом сохраняет выполненные движения в кольцевом буфере. При перемещении назад движения выполняются на основании сохраненной в памяти информации.
Невозможность перемещения назад после удаления данных из буфера:
В перечисленных ниже случаях происходит удаление информации из буфера. После этого перемещение назад снова возможно только после выполнения движений в направлении вперед.
Сброс программы.
Отмена выбора программы.
Добавление или удаление строк из программы.
Команда KRL RESUME
Выбор записи на другое движение, не являющееся актуальным.
Тем не менее, без ограничений допускается выбор записи в произвольную точку сегмента в пределах актуального блока Spline. Это
считается выбором записи на актуальное движение, так как система
управления роботом планирует и выполняет блок Spline как одно
движение.
Система управления удаляет информацию из буфера без выдачи соответствующего сообщения.
Свойства
Движение назад возможно только в режимах работы T1 и T2.
При движении назад выполняются только перемещения, без активизации контрольных структур и указаний системы управления.
Выходы, Flags и Cycflag при движении вперед не записываются. Поэтому при движении назад их предыдущее состояние не восстанавливается.
Скорость сохраняется как при движении вперед.
Существует возможность, что при движении назад в режиме T2 будут
срабатывать контрольные функции, которые не срабатывают при
движении вперед. В этом случае необходимо уменьшить значение
коррекции программы.
По умолчанию возможность движения назад активирована. Для группы пользователей «Эксперт возможно его дезактивировать или целенаправленно заблокировать для определенных перемещений.
Дополнительная информация приведена в инструкции по эксплу
атации и программированию для системных интеграторов.
Моментный/
силовой режим,
режим
Vectormove
Для перемещений в моментном или силовом режиме/режиме
Vectormove действительно следующее:
при обычных движениях возможно перемещение назад, но при этом
моментный или силовой режим/режим Vectormove автоматически выключается;
движения Spline не могут выполняться с перемещением назад.
7.12.2.1 Особенности при использовании подпрограмм
188 / 277
Движения, которые выполняются в направлении вперед в программе
прерывания, не записываются. Следовательно, их нельзя выполнить
с перемещением в направлении назад.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
7 Выполнение программы
Если подпрограмма была полностью пройдена в направлении вперед, ее нельзя выполнить в направлении назад.
Если движение вперед в подпрограмме было остановлено, то дальнейшие действия зависят от позиции указателя предварительного
выполнения:
Позиция указателя предварительного выполнения
Описание
Указатель предварительного
выполнения находится в пределах подпрограммы.
Перемещение в направлении
назад разрешено.
Указатель предварительного
выполнения уже вышел за пределы подпрограммы.
Перемещение в направлении
назад невозможно.
Предотвращение данной ситуации:
Перед командой END подпрограммы вызвать останов предварительного выполнения,
например, командой WAIT SEC 0.
Однако, в этом случае в данной
точке больше невозможно выполнить сглаживание.
Или установить параметр
$ADVANCE на «1». Это не всегда
позволяет избежать сообщения
об ошибке. но снижает его вероятность и позволяет продолжать
сглаживание.
7.12.2.2 Особенности при сглаживании
Описание
При движении назад сглаживание невозможно. То есть если при движении вперед точки сглаживались, то траектория обратного движения будет отличаться от траектории движения вперед. Поэтому после
обратного запуска роботу может сначала понадобиться выполнить перемещение SAK к траектории обратного движения, хотя он и не покидал
траектории, пройденной в направлении вперед.
Пример 1
Обратный пуск вне зоны сглаживания:
Нажатие клавиши обратного пуска происходит, когда робот находится на
траектории, но не в зоне сглаживания. После этого робот выполняет движение по траектории в обратном направлении к целевой точке предыду
щего перемещения.
PBACK = положение робота в момент нажатия клавиши обратного пуска
Рис. 7-14: 1-й случай: обратный пуск вне зоны сглаживания
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
189 / 277
KUKA System Software 8.3
Даже если целевая точка предыдущего движения была сглажена, перемещение все равно выполняется точно в эту точку.
Рис. 7-15: 2-й случай: обратный пуск вне зоны сглаживания
Пример 2
Обратный пуск в зоне сглаживания:
Нажатие клавиши обратного пуска происходит, когда робот находится в
зоне сглаживания. После этого робот выполняет перемещение SAK к началу зоны сглаживания и останавливается. Если после этого повторно
нажимается клавиша обратного пуска, только тогда начинается движение в обратном направлении, т. е. робот перемещается по траектории
назад к целевой точке предыдущего движения.
Рис. 7-16: Обратный пуск в зоне сглаживания
7.12.2.3 Особенности при колебательных движениях
Описание
Для движений в обратном направлении колебание невозможно. То есть
если при движении вперед использовалось колебание, то траектория обратного движения будет отличаться от траектории движения вперед. Поэтому после обратного запуска робот должен сначала выполнить
перемещение SAK к траектории обратного движения, хотя он и не покидал траектории, пройденной в направлении вперед.
Пример
Обратный пуск на траектории движения с колебаниями:
Нажатие клавиши обратного пуска происходит при выполнении роботом
колебательного движения. После этого робот выполняет перемещение
SAK к запрограммированной траектории и останавливается. Если после
этого повторно нажимается клавиша обратного пуска, только тогда начинается движение в обратном направлении, т. е. робот перемещается по
траектории назад к целевой точке предыдущего движения.
PBACK = положение робота в момент нажатия клавиши обратного пуска
190 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
7 Выполнение программы
Рис. 7-17: Обратный пуск на траектории движения с колебаниями
7.12.2.4 Переход от движения назад к движению вперед
Условие
После перемещения назад снова выполнить перемещение вперед возможно только при соблюдении следующих условий:
Для программной строки, на которой уже находится указатель записи
обратного движения, возможен выбор записи;
Если первое перемещение, которое теперь снова должно выполняться в направлении вперед, является обычным перемещением, оно
должно быть полностью запрограммировано.
То есть, к примеру, невозможно перейти от движения назад к движению вперед, если первое перемещение было перемещением
PTP_REL.
На перемещения Spline данное ограничение не распространяется за
некоторыми исключениями.
Описание
При нажатии в первый раз после движения назад клавиши запуска впе
ред происходит следующее:
если SAK достигнут, автоматически восстанавливается вид выполнения последней выполненной в направлении вперед программы, и робот перемещается по траектории вперед;
если SAK не достигнут, выполняется перемещение SAK. Во время
этого вид выполнения программы остается на #BSTEP. После перемещения SAK робот останавливается. Теперь необходимо повторно
нажать клавишу запуска вперед. После этого автоматически восстанавливается вид выполнения последней выполненной в направлении вперед программы, и робот перемещается по траектории вперед.
Если в пределах одной контрольной структуры происходит переход от
движения назад к движению вперед, то робот сначала перемещается
вперед до завершения контрольной структуры. После чего он останавливается и выдает сообщение Контрольная структура, следующая запись {Номер записи}. Номер записи указывает на первую запись после
контрольной структуры.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
191 / 277
KUKA System Software 8.3
192 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
8 Основы программирования движений
8
Основы программирования движений
8.1
Обзор видов движений
Могут быть запрограммированы следующие виды движений:
Движение Point-to-Point (PTP)
(>>> 8.2 "Вид движения РТР" Страница 193)
Линейное движение (LIN)
(>>> 8.3 "Вид движения LIN" Страница 194)
Круговое движение (CIRC)
(>>> 8.4 "Вид движения CIRC" Страница 194)
Движения Spline
Движения Spline обладают рядом преимуществ в сравнении с обычными движениями PTP, LIN и CIRC.
(>>> 8.7 "Вид движения Spline" Страница 197)
Точка запуска движения всегда является целевой точкой преды
дущего движения.
Следующие движения объединены понятием «движения CP»
(«Continuous Path» – непрерывный путь):
8.2
LIN, CIRC, блоки CP-Spline, SLIN, SCIRC
Вид движения РТР
Робот выполняет TCP вдоль наиболее быстрой траектории к целевой
точке. Наиболее быстрой траекторией, как правило, не является кратчайшая траектория, т. е. не прямая. Так как оси робота совершают вращательное движение, криволинейные траектории могут выполняться
быстрее, чем прямые.
Точный ход движения непредсказуем.
Рис. 8-1: Движение РТР
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
193 / 277
KUKA System Software 8.3
8.3
Вид движения LIN
Робот выполняет TCP с определенной скоростью по прямой к целевой
точке.
Рис. 8-2: Движение LIN
8.4
Вид движения CIRC
Робот выполняет TCP с определенной скоростью вдоль круговой траектории к целевой точке. Круговая траектория задается начальной, вспомогательной и целевой точкой.
Рис. 8-3: Движение CIRC
194 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
8 Основы программирования движений
8.5
Сглаживание
Сглаживание означает, что робот перемещается не точно в запрограммированную точку. Сглаживание является опцией, которую можно выбрать при программировании перемещения.
Сглаживание невозможно, если после команды перемещения следует
команда, приводящая к останову предварительного выполнения.
Сглаживание при перемещении PTP
TCP уходит с траектории, на которой был бы выполнен точный подвод в
целевую точку, и движется по более быстрой траектории. При программировании перемещения устанавливается расстояние до целевой точки,
при котором TCP самое раннее может отклониться от своей первоначальной траектории.
Ход траектории при сглаженном перемещении PTP непредсказуем. Нельзя также предсказать, с какой стороны сглаженной точки пройдет траектория.
Рис. 8-4: Движение РТР, сглаживание Р2
Сглаживание при перемещении LIN
TCP уходит с траектории, на которой был бы выполнен точный подвод в
целевую точку, и движется по более короткой траектории. При программировании перемещения устанавливается расстояние до целевой точки,
при котором TCP самое раннее может отклониться от своей первоначальной траектории.
Рис. 8-5: Движение LIN, сглаживание Р2
Сглаживание при перемещении CIRC
TCP уходит с траектории, на которой был бы выполнен точный подвод в
целевую точку, и движется по более короткой траектории. При программировании перемещения устанавливается расстояние до целевой точки,
при котором TCP самое раннее может отклониться от своей первоначальной траектории.
Робот всегда проходит точно через вспомогательную точку.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
195 / 277
KUKA System Software 8.3
Рис. 8-6: Движение CIRC, сглаживание точки PEND
8.6
Контроль ориентации LIN, CIRC
Описание
TCP может иметь в начальной и в конечной точке движения различные
ориентации. Начальная ориентация может переходить в целевую ориентацию различными способами. При программировании движения CP
должен быть выбран один из способов.
Контроль ориентации для движений LIN и CIRC осуществляется следующим образом:
Движение LIN
В окне опций Параметры движения
Контроль ориентации
Описание
Постоянная ориентация
Ориентация TCP во время движения
остается постоянной.
Для целевой точки запрограммированная ориентация игнорируется, и сохраняется ориентация начальной точки.
Стандарт
Ориентация TCP во время движения
постоянно меняется.
Указание: если в режиме Стандартный
возникает сингулярность ручных осей,
выбрать вместо этого Hand PTP.
Hand PTP
Ориентация TCP во время движения
постоянно меняется. Это происходит изза линейного перевода (осевое перемещение) углов ручной оси.
Указание: применять режим Hand PTP в
том случае, если в режиме Стандартный возникает сингулярность ручных
осей.
Ориентация TCP во время движения
постоянно меняется, однако несколько
неравномерно. Поэтому Hand PTP не
пригоден, если робот должен в точности
следовать определенной траектории,
например, при лазерной сварке.
196 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
8 Основы программирования движений
Если в режиме Стандартный возникает сингулярность ручных
осей и в режиме Ручной PTP требуемая ориентация не выдерживается достаточно точно, рекомендуются следующие меры:
повторить обучение на начальную и/или целевую точку. При этом ориентацию следует настроить так, чтобы больше не возникала сингулярность ручных осей и можно было выполнить движение по данной
траектории в режиме Стандартный.
Рис. 8-7: Постоянная ориентация
Рис. 8-8: Стандартный или Рука PTP
Движение CIRC
Для движений CIRC имеется такой же выбор возможностей контроля
ориентации, что и для движений LIN.
При движениях CIRC система управления роботом учитывает только запрограммированную ориентацию целевой точки. Запрограммированная
ориентация вспомогательной точки игнорируется.
8.7
Вид движения Spline
Spline – это движение, которое особенно подходит для сложных, изогнутых траекторий. Такие траектории можно также создать с помощью сглаженных движений LIN и CIRC, однако Spline обладает по сравнению с
ними определенными преимуществами.
Самым разносторонним движением Spline является блок Spline. Блок
Spline позволяет объединять несколько движений в одно общее движение. Блок Spline планируется и выполняется системой управления роботом как 1 запись движений.
Движения, которые могут располагаться в блоке Spline, называются сегментами Spline. Их настройка выполняется по отдельности.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
197 / 277
KUKA System Software 8.3
Блок CP-Spline может включать в себя сегменты SPL, SLIN и SCIRC.
Блок PTP-Spline может содержать сегменты SPTP.
Кроме блоков Spline, существует возможность программирования отдельных движений Spline: SLIN, SCIRC и SPTP.
Преимущества
блока Spline
Рис. 8-9: Изогнутая траектория с блоком Spline
Траектория задается точками, которые лежат на траектории. Можно
легко создать желаемую траекторию.
Запрограммированная скорость поддерживается лучше, чем при
обычных видах движения. Уменьшение скорости происходит только
в немногочисленных случаях.
(>>> 8.7.1 "Профиль скоростей движений Spline" Страница 199)
Кроме этого, в блоках CP-Spline можно задавать особые области неизменного движения.
198 / 277
Ход траектории всегда одинаков, независимо от коррекции, скорости
или ускорения.
Высокая точность выполнения круговых контуров и узких радиусов.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
8 Основы программирования движений
Недостатки LIN/
CIRC
Рис. 8-10: Изогнутая траектория со сглаженными движениями LIN
8.7.1
Траектория задается сглаживаемыми точками, которые лежат не на
траектории. Зоны сглаживания труднопредсказуемы. Создать желаемую траекторию сложно.
Зачастую происходят труднопредсказуемые уменьшения скорости,
например, в зонах сглаживания и близколежащих точках.
Ход траектории изменяется, если сглаживание невозможно, например, из-за времени.
Ход траектории изменяется в зависимости от коррекции, скорости
или ускорения.
Профиль скоростей движений Spline
Ход траектории всегда одинаков, независимо от коррекции, скорости или
ускорения.
Система управления роботом уже при планировании учитывает физические границы робота. Робот движется в рамках запрограммированной
скорости с наибольшей возможной скоростью, допускаемой его физическими границами. Это является преимуществом в сравнении с традиционными движениями LIN и CIRC, для которых физические границы при
планировании не учитывались. Эти границы начинают действовать лишь
при выполнении движения, в определенных случаях вызывая останов
системы.
Снижение скорости
К случаям, в которых требуется снижение скорости до значения ниже запрограммированного, относятся прежде всего:
выраженные углы;
значительная переориентация;
значительные перемещения дополнительных осей;
вблизи областей сингулярности.
Снижения скорости ввиду значительной переориентации можно избежать для сегментов Spline, выбрав контроль ориентации Без ориентации.
Снижение скорости до 0
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
199 / 277
KUKA System Software 8.3
Это происходит:
в следующих друг за другом точках с одинаковыми координатами;
в следующих друг за другом сегментах SLIN и/или SCIRC. Причина:
непостоянное направление вектора скорости.
На переходах SLIN-SCIRC скорость также падает до 0, если прямая
тангенциально переходит в окружность, поскольку окружность в отличие от прямых искривлена.
Рис. 8-11: Точный останов на Р2
Рис. 8-12: Точный останов на Р2
Исключения:
если сегменты SLIN следуют друг за другом, образуя прямую, и при
этом ориентации сегментов равномерно меняются, то скорость не
снижается.
Рис. 8-13: Прохождение Р2 без точного останова.
На переходе SCIRC-SCIRC скорость не снижается, если оба круговых
контура имеют один и тот же центр и одинаковый радиус, а также
если ориентации равномерно меняются. (Трудно поддается обучению, поэтому следует рассчитывать и программировать точки).
Круговые контуры с одним и тем же центром и одинаковым ради
усом иногда программируются для получения круговых контуров
≥ 360 °. Более простой возможностью является программирование угла круга.
8.7.2
Выбор записи при движениях Spline
Блок Spline
По сегментам блока Spline может быть выполнен выбор записи.
Блок CP-Spline:
Перемещение SAK выполняется как обычное движение LIN. Об этом
появляется сообщение, которое необходимо квитировать.
200 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
8 Основы программирования движений
Блок PTP-Spline:
Перемещение SAK выполняется как обычное движение PTP. Сообщение об этом не выводится.
После выбора записи траектория, как правило, проходит так, как если бы
Spline выполнялся по стандартной процедуре программы.
Исключения возможны, если Spline перед выбором записи еще ни разу
не осуществлялся и если в этом случае выбор записи выполняется по началу блока Spline:
Начальная точка движения Spline является последней точкой перед блоком Spline, т. е. начальная точка находится за пределами блока. Система
управления роботом сохраняет начальную точку при обычном прохождении Spline. За счет этого она становится известной на случай последующего выбора записи. Если же блок Spline еще никогда не выполнялся,
начальная точка неизвестна.
Если после перемещения SAK нажать клавишу пуска, появляется сообщение об изменении траектории, которое необходимо квитировать.
Пример: измененная траектория при выборе записи по Р1
Рис. 8-14: Пример: измененная траектория при выборе записи Р1
1
PTP P0
2
SPLINE
3
SPL P1
4
SPL P2
5
SPL P3
6
SPL P4
7
SCIRC P5, P6
8
SPL P7
9
SLIN P8
10 ENDSPLINE
Строка
2
3-9
10
SCIRC
Описание
Строка заголовка/начало блока CP-Spline
Сегменты Spline
Конец блока CP-Spline
При выборе записи по сегменту SCIRC, для которого запрограммирован
угол круга, подвод в целевую точку осуществляется с учетом угла круга
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
201 / 277
KUKA System Software 8.3
при условии, что системе управления роботом известна начальная точка.
Если начальная точка не известна системе управления, выполняется
подвод в запрограммированную целевую точку. В данном случае появляется сообщение о том, что угол круга не учитывается.
При выборе записи по отдельному движению SCIRC угол круга никогда
не учитывается.
8.7.3
Изменения в блоках Spline
Описание
Изменение позиции точки:
Если внутри блока Spline смещается точка, траектория изменяется
максимум в 2 сегментах до этой точки и в 2 сегментах после нее.
Малые сдвиги точек, как правило, не приводят к изменению траектории. Однако, при следовании друг за другом очень длинных и очень
коротких сегментов незначительные изменения могут иметь очень
серьезное действие.
Изменение типа сегмента:
Если сегмент SPL заменяется сегментом SLIN или наоборот, траектория изменяется в предшествующем и в последующем сегментах.
Пример 1
Исходная траектория:
PTP P0
SPLINE
SPL P1
SPL P2
SPL P3
SPL P4
SCIRC P5, P6
SPL P7
SLIN P8
ENDSPLINE
Рис. 8-15: Исходная траектория
В сравнении с исходной траекторией смещается одна точка:
Смещается Р3. В связи с этим изменяется траектория в сегментах P1 P2, P2 - P3 и P3 - P4. Сегмент P4 - P5 в этом случае не изменяется, так
как он относится к SCIRC и определяет круговую траекторию.
202 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
8 Основы программирования движений
Рис. 8-16: Точка была смещена
В сравнении с исходной траекторией изменяется тип сегмента:
В исходной траектории изменен тип сегмента P2 - P3 с SPL на SLIN. Изменяется траектория в сегментах P1 - P2, P2 - P3 и P3 - P4.
PTP P0
SPLINE
SPL P1
SPL P2
SLIN P3
SPL P4
SCIRC P5, P6
SPL P7
SLIN P8
ENDSPLINE
Рис. 8-17: Изменен тип сегмента
Пример 2
Исходная траектория:
...
SPLINE
SPL {X 100, Y 0, ...}
SPL {X 102, Y 0}
SPL {X 104, Y 0}
SPL {X 204, Y 0}
ENDSPLINE
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
203 / 277
KUKA System Software 8.3
Рис. 8-18: Исходная траектория
В сравнении с исходной траекторией смещается одна точка:
Смещается Р3. В связи с этим изменяется траектория во всех показанных сегментах. Так как сегменты P2 - P3 и P3 - P4 являются очень короткими, а сегменты P1 - P2 и P4 - P5 очень длинными, небольшое
смещение приводит к сильному изменению траектории.
...
SPLINE
SPL {X 100, Y 0, ...}
SPL {X 102, Y 1}
SPL {X 104, Y 0}
SPL {X 204, Y 0}
ENDSPLINE
Рис. 8-19: Точка была смещена
Способ устранения
8.7.4
расстояние между точками распределить более равномерно;
прямые (за исключением очень коротких прямых) программировать
как сегменты SLIN.
Сглаживание движений Spline
Для всех блоков Spline и отдельных движений Spline возможно взаимное
сглаживание. Не имеет значения, идет ли речь о блоках CP- или PTPSpline, а также какие отдельные движения используются.
Тип движения дуги сглаживания всегда соответствует второму движению. Например, при сглаживании SPTP-SLIN дуга сглаживания имеет тип
CP.
Движения Spline не могут быть сглажены обычными движениями (LIN,
CIRC, PTP).
Сглаживание невозможно из-за времени или останова предварительного выполнения:
Если сглаживание невозможно по причине времени или из-за останова
предварительного выполнения, робот ожидает в начале дуги сглаживания.
204 / 277
По причине времени: робот перемещается дальше, как только система управления сможет запланировать следующую запись.
В случае останова предварительного выполнения: с началом дуги
сглаживания достигается конец актуальной записи. Т. е. останов
предварительного выполнения устранен, и система управления роботом может планировать следующую запись. Робот перемещается
дальше.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
8 Основы программирования движений
В обоих случаях робот теперь движется по дуге сглаживания. Таким образом, сглаживание, строго говоря, возможно, но с задержкой.
Такая работа противоположна движениям LIN, CIRC или PTP. Если по
вышеуказанным причинам сглаживание в них невозможно, то подвод в
целевую точку осуществляется точно.
Отсутствие сглаживания в MSTEP и ISTEP:
Для видов выполнении программ MSTEP и ISTEP подвод осуществляется точно в целевую точку также при наличии сглаженных движений.
При сглаживании от блока Spline к блоку Spline в результате данного точного останова траектория в последнем сегменте первого блока и в первом сегменте второго блока отличается от вида выполнения программы
GO.
Во всех других сегментах в обоих блоках Spline траектория в MSTEP,
ISTEP и GO одинакова.
8.7.5
Замена сглаженного перемещения CP блоком Spline
Описание
Чтобы заменить традиционные сглаженные перемещения CP блоками
Spline, требуется изменить программу следующим образом:
заменить LIN – LIN на SLIN – SPL – SLIN;
заменить LIN – CIRC на SLIN – SPL – SCIRC.
Рекомендация: вставить элемент SPL в исходную цепь. Перемещение SCIRC начнется после исходного CIRC.
В случае со сглаженными перемещениями программируется угловая
точка. Вместо этого в блоке Spline программируются точки в начале и
конце сглаживания.
Моделировать следующее сглаженное движение:
LIN P1 C_DIS
LIN P2
Движение Spline:
SPLINE
SLIN P1A
SPL P1B
SLIN P2
ENDSPLINE
P1A = начало сглаживания, P1B = конец сглаживания
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
205 / 277
KUKA System Software 8.3
Рис. 8-20: Сглаженное движение – движение Spline
Возможности измерения P1A и P1B:
пройти сглаженную траекторию и сохранить положения в нужном
месте с помощью триггера;
рассчитать точки в программе с KRL;
начало сглаживания можно определить по критерию сглаживания.
Пример: если указан критерий сглаживания C_DIS, то расстояние от
начала сглаживания до угловой точки соответствует значению
$APO.CDIS.
Конец сглаживания зависит от запрограммированной скорости.
Траектория SPL не соответствует точно дуге сглаживания, даже если
точки P1A и P1B находятся точно в начале и конце сглаживания. Чтобы
сохранить точную дугу сглаживания, следует добавить дополнительные
точки в движение Spline. Обычно достаточно одной точки.
Пример
Моделировать следующее сглаженное движение:
$APO.CDIS=20
$VEL.CP=0.5
LIN {Z 10} C_DIS
LIN {Y 60}
Движение Spline:
SPLINE WITH $VEL.CP=0.5
SLIN {Z 30}
SPL {Y 30, Z 10}
SLIN {Y 60}
ENDSPLINE
Начало дуги сглаживания рассчитано на основе критерия сглаживания.
206 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
8 Основы программирования движений
Рис. 8-21: Пример: сглаженное движение – движение Spline, 1
Траектория SPL все еще не соответствует точно дуге сглаживания. Поэтому в движение Spline добавляется дополнительный сегмент SPL.
SPLINE WITH $VEL.CP=0.5
SLIN {Z 30}
SPL {Y 15, Z 15}
SPL {Y 30, Z 10}
SLIN {Y 60}
ENDSPLINE
Рис. 8-22: Пример: сглаженное движение – движение Spline, 2
Теперь с помощью дополнительной точки траектория соответствует дуге
сглаживания.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
207 / 277
KUKA System Software 8.3
8.7.5.1
Переход SLIN-SPL-SLIN
В последовательности сегментов SLIN-SPL-SLIN желательно, чтобы сегмент SPL проходил внутри малого угла между двумя прямыми. В зависимости от точки начала и конца сегмента SPL траектория также может
проходить вне этого угла.
Рис. 8-23: SLIN-SPL-SLIN
Траектория проходит внутри этого угла, если выполнены следующие условия:
два сегмента SLIN пересекаются в удлинении;
2/3 ≤ a/b ≤ 3/2.
a = расстояние от начальной точки сегмента SPL до точки пересечения сегментов SLIN
b = расстояние от точки пересечения сегментов SLIN до целевой точки сегмента SPL
8.8
Контроль ориентации CP-Spline
Описание
TCP может иметь в начальной и в конечной точке движения различные
ориентации. При программировании движения CP-Spline необходимо
выбрать способ обращения с различными ориентациями.
Контроль ориентации задается в окне опции Параметры перемещения.
Контроль ориентации
Описание
Постоянная ориентация
Ориентация TCP во время движения остается постоянной.
Ориентация начальной точки сохраняется. Запрограммированная ориентация целевой точки не учитывается.
Стандарт
208 / 277
Ориентация TCP во время движения постоянно меняется. В
целевой точке у TCP имеется запрограммированная ориентация.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
8 Основы программирования движений
Контроль ориентации
Описание
Hand PTP
Ориентация TCP во время движения постоянно меняется.
Это происходит из-за линейного перевода (осевое перемещение) углов ручной оси.
Указание: применять режим Hand PTP в том случае, если в
режиме Стандарт возникает сингулярность ручных осей.
Ориентация TCP во время движения постоянно меняется, но
это происходит не совсем равномерно. Поэтому Hand PTP не
пригоден, если робот должен в точности следовать определенному ходу ориентации, например, при лазерной сварке.
Без ориентации
Данная опция доступна только для сегментов CP-Spline. (Не
для блока Spline или для отдельных перемещений Spline).
Она применяется, если для какой-либо точки не требуется
определенной ориентации.
(>>> "Без ориентации" Страница 209)
Рис. 8-24: Постоянная ориентация
Рис. 8-25: Контроль ориентации Стандарт
Без ориентации
Без ориентации применяется, если для какой-либо точки не требуется
определенной ориентации. Если выбрана эта опция, заученная или запрограммированная ориентация точки игнорируется системой управле
ния роботом. Вместо этого она рассчитывает оптимальную ориентацию
для данной точки, исходя из ориентаций окружающих точек. Это сокращает тактовое время.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
209 / 277
KUKA System Software 8.3
Свойства Без ориентации:
при виде выполнения программы MSTEP и ISTEP робот останавливается на ориентациях, рассчитанных системой управления роботом;
при выборе строки по пункту с Без ориентации робот принимает ориентацию, рассчитанную системой управления роботом.
Для следующих сегментов выбор Без ориентации запрещен:
SCIRC
последний сегмент в данном блоке Spline;
сегменты SCIRC с контролем ориентации круговой траектории по отношению к траектории;
сегменты, за которыми следует сегмент SCIRC с по отношению к
траектории;
сегменты, за которыми следует сегмент с Постоянная ориентация.
Для движений SCIRC имеется такой же выбор возможностей контроля
ориентации, что и для движений SLIN. Дополнительно для движений
SCIRC можно определить, должен ли контроль ориентации быть соотнесен с пространственной ориентацией или с траекторией.
Контроль ориентации
Описание
по отношению к базе
Контроль ориентации по отношению к
базе при круговом движении
по отношению к траектории
Контроль ориентации по отношению к
траектории при круговом движении
(>>> 8.8.1 "Комбинации функций Контроль ориентации и Круговой контур, контроль ориентации" Страница 211)
Для следующих движений опция по отношению к траектории запрещена:
сегменты SCIRC, для которых действует Без ориентации;
движения SCIRC, которым предшествует сегмент Spline, для которого действует Без ориентации.
Ориентация вспомогательной точки:
В случае движений SCIRC с контролем ориентации Стандарт система
управления роботом учитывает запрограммированную ориентацию
вспомогательной точки, однако лишь условно.
Начальная ориентация переходит в целевую ориентацию по пути, который включает в себя ориентацию вспомогательной точки. Т.е. ориентация вспомогательной точки принимается по пути, но не обязательно во
вспомогательной точке.
210 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
8 Основы программирования движений
8.8.1
Комбинации функций Контроль ориентации и Круговой контур, контроль ориентации
Рис. 8-26: Постоянная ориентация + относительно траектории
Рис. 8-27: Стандарт + относительно траектории
Рис. 8-28: Постоянная ориентация + относительно базы
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
211 / 277
KUKA System Software 8.3
Рис. 8-29: Стандарт + относительно базы
8.9
Угол круга
Для большинства круговых движений можно запрограммировать угол
круга.
Информация о том, возможно ли такое программирование для
конкретного кругового движения, приводится в описании движения в части данной документации, посвященной программированию.
Угол круга задает общий угол кругового движения. Это позволяет продлить движение за пределы запрограммированной целевой точки или же
укоротить его. В данном случае действительная целевая точка больше
не соответствует запрограммированной целевой точке.
Единица: град. Можно программировать углы круга больше + 360° и
меньше - 360°.
Математический знак определяет, в каком направлении отрабатывается
круговая траектория:
8.10
знак «+»: направление начальная точка › вспомогательная точка ›
целевая точка;
знак «-»: направление начальная точка › целевая точка › вспомогательная точка.
Сингулярность
Роботы KUKA с 6 степенями свободы имеют 3 различных сингулярных
положения:
сингулярность перевернутого положения;
сингулярность развернутого положения;
сингулярность ручных осей.
Сингулярное положение характеризуется тем, что однозначная обратная
трансформация (пересчет прямоугольных координат в осевые значения), несмотря на то, что заданы состояние и поворот, невозможна. В
этом случае или если малейшее изменение декартовых координат при
212 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
8 Основы программирования движений
водят к очень большим изменениям осевых углов, говорят о сингулярных
положениях.
Перевернутое
положение
При сингулярности перевернутых положений точка запястья (= центральная точка оси A5) лежит вертикально на оси А1 робота.
Позицию оси А1 невозможно однозначно определить путем обратной
трансформации, поэтому она может принимать любые значения.
Если целевая точка одной записи движений PTP лежит в сингулярности
перевернутых положений, то система управления роботом может реагировать через системные переменные $SINGUL_POS[1] следующим образом:
Развернутые
положения
0: угол оси А1 определяется ноль градусов. (настройка по умолчанию);
1: угол оси А1 остается неизменным от точки пуска до целевой точки.
При сингулярности развернутых положений точка запястья (= центральная точка оси A5) лежит на продолжении осей А2 и А3 робота.
Робот находится на краю своей рабочей зоны.
Обратной трансформацией можно однозначно определить осевой угол,
однако, следствием малых декартовых скоростей являются большие
осевые скорости осей А2 и А3.
Если целевая точка одной записи движений PTP лежит в сингулярности
развернутых положений, то система управления роботом может реагировать через системные переменные $SINGUL_POS[2] следующим образом:
Ручные оси
0: угол оси А2 определяется ноль градусов. (настройка по умолчанию);
1: угол оси А2 остается неизменным от точки пуска до целевой точки.
При сингулярности ручных осей оси А4 и А6 расположены параллельно
друг другу, ось А5 в диапазоне ±0,01812°.
Положение обеих осей невозможно однозначно определить путем об
ратной трансформации. Но существует сколько угодно положений для
осей А4 и А6 с одинаковой суммой осевых углов.
Если целевая точка одной записи перемещений PTP лежит в сингулярности этих ручных осей, то система управления роботом может реагировать через системные переменные $SINGUL_POS[3] следующим
образом:
0: угол оси A4 устанавливается на ноль градусов (настройка по умолчанию);
1: угол оси А4 остается неизменным от начальной точки до целевой
точки.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
213 / 277
KUKA System Software 8.3
214 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
9 Программирование для группы "Пользов...
9
Программирование для группы "Пользователь" (встроенные формуляры)
В программах со следующими перемещениями
или положениями осей может возникнуть нарушение смазочной пленки редукторов осей:
перемещения < 3°;
колеблющиеся перемещения;
зоны редуктора, находящиеся сверху в течение долгого времени;
Обеспечить достаточное снабжение редукторов маслом. Для этого следует запрограммировать колеблющиеся или короткие перемещения
(< 3°) таким образом, чтобы соответствующие оси постоянно (например, каждый цикл) перемещались более чем на 40°.
В случае с зонами редуктора, находящимися сверху в течение долгого
времени, следует обеспечить достаточное снабжение маслом; для этого следует запрограммировать переориентации центральной руки. Таким образом масло сможет попасть в зоны редуктора под действием
силы тяжести. Требуемая частота переориентаций:
при малой нагрузке (температура редуктора < +35 °C): один раз в
день;
при средней нагрузке (температура редуктора от +35 до 55 °C): каждый час;
при высокой нагрузке (температура редуктора > +55 °C): каждые 10
мин.
При несоблюдении этого требования возможно повреждение редукто
ров.
9.1
Имена во встроенных формулярах
Во встроенных формулярах можно ввести имена для записей данных. К
ним относятся, например, имена точек, имена записей данных движения
и т.п.
Для имен имеются следующие ограничения:
максимальная длина 23 знака;
не допускаются специальные знаки кроме $;
на первом месте не допускается цифра.
Ограничения не действительны для имен выходов.
Для встроенных формуляров в технологических пакетах могут действовать другие ограничения.
9.2
Программирование движений PTP, LIN, CIRC
9.2.1
Программирование движения РТР
При программировании движений следить за
тем, чтобы при выполнении программы не произошла намотка или повреждение линий энергоснабжения.
Условие
Программа выбрана.
Выбран режим работы T1.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
215 / 277
KUKA System Software 8.3
Порядок
действий
1. Переместить TCP в позицию, которая должна быть заучена в качестве целевой точки.
2. Установить курсор в строку, после которой должна быть вставлена
команда движения.
3. Выбрать последовательность меню Команды > Движение > PTP.
4. Во встроенном формуляре установить параметры.
(>>> 9.2.2 "Встроенный формуляр PTP" Страница 216)
5. Сохранить команду, нажав кнопку Команда OK.
9.2.2
Встроенный формуляр PTP
Рис. 9-1: Встроенный формуляр движения PTP
Поз.
Описание
1
Вид движения PTP
2
Имя целевой точки
Система автоматически задает имя. Имя может быть перезаписано.
(>>> 9.1 "Имена во встроенных формулярах" Страница 215)
Для редактирования данных точки коснуться стрелки. Откроется соответствующее окно опции.
(>>> 9.2.7 "Окно опций Фреймы" Страница 219)
3
CONT: сглаживание целевой точки.
[пусто]: точный подвод в целевую точку.
4
Скорость:
5
1 … 100 %
Имя записи данных движения
Система автоматически задает имя. Имя может быть перезаписано.
Для редактирования данных точки коснуться стрелки. Откроется соответствующее окно опции.
(>>> 9.2.8 "Окно опции Параметры перемещения (LIN, CIRC,
PTP)" Страница 219)
9.2.3
Программирование движения LIN
При программировании движений следить за
тем, чтобы при выполнении программы не произошла намотка или повреждение линий энергоснабжения.
Условие
Порядок
действий
216 / 277
Программа выбрана.
Выбран режим работы T1.
1. Переместить TCP в позицию, которая должна быть заучена в качестве целевой точки.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
9 Программирование для группы "Пользов...
2. Установить курсор в строку, после которой должна быть вставлена
команда движения.
3. Выбрать последовательность меню Команды > Движение > LIN.
4. Во встроенном формуляре установить параметры.
(>>> 9.2.4 "Встроенный формуляр LIN" Страница 217)
5. Сохранить команду, нажав кнопку Команда OK.
9.2.4
Встроенный формуляр LIN
Рис. 9-2: Встроенный формуляр движения LIN
Поз.
Описание
1
Вид движения LIN
2
Имя целевой точки
Система автоматически задает имя. Имя может быть перезаписано.
(>>> 9.1 "Имена во встроенных формулярах" Страница 215)
Для редактирования данных точки коснуться стрелки. Откроется соответствующее окно опции.
(>>> 9.2.7 "Окно опций Фреймы" Страница 219)
3
4
CONT: сглаживание целевой точки.
[пусто]: точный подвод в целевую точку.
Скорость:
5
0.001 … 2 м/с
Имя записи данных движения
Система автоматически задает имя. Имя может быть перезаписано.
Для редактирования данных точки коснуться стрелки. Откроется соответствующее окно опции.
(>>> 9.2.8 "Окно опции Параметры перемещения (LIN, CIRC,
PTP)" Страница 219)
9.2.5
Программирование движения CIRC
При программировании движений следить за
тем, чтобы при выполнении программы не произошла намотка или повреждение линий энергоснабжения.
Условие
Порядок
действий
Программа выбрана.
Выбран режим работы T1.
1. Переместить TCP в позицию, которая должна быть заучена в качестве вспомогательной точки.
2. Установить курсор в строку, после которой должна быть вставлена
команда движения.
3. Выбрать последовательность меню Команды > Движение > CIRC.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
217 / 277
KUKA System Software 8.3
4. Во встроенном формуляре установить параметры.
(>>> 9.2.6 "Встроенный формуляр CIRC" Страница 218)
5. Нажать Touchup HP.
6. Переместить TCP в позицию, которая должна быть заучена в качестве целевой точки.
7. Сохранить команду, нажав кнопку Команда OK.
9.2.6
Встроенный формуляр CIRC
Рис. 9-3: Встроенный формуляр движения CIRC
Поз.
Описание
1
Вид движения CIRC
2
Имя вспомогательной точки
Система автоматически задает имя. Имя может быть перезаписано.
(>>> 9.1 "Имена во встроенных формулярах" Страница 215)
3
Имя целевой точки
Система автоматически задает имя. Имя может быть перезаписано.
Для редактирования данных точки коснуться стрелки. Откроется соответствующее окно опции.
(>>> 9.2.7 "Окно опций Фреймы" Страница 219)
4
5
CONT: сглаживание целевой точки.
[пусто]: точный подвод в целевую точку.
Скорость:
6
0.001 … 2 м/с
Имя записи данных движения
Система автоматически задает имя. Имя может быть перезаписано.
Для редактирования данных точки коснуться стрелки. Откроется соответствующее окно опции.
(>>> 9.2.8 "Окно опции Параметры перемещения (LIN, CIRC,
PTP)" Страница 219)
218 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
9 Программирование для группы "Пользов...
9.2.7
Окно опций Фреймы
Рис. 9-4: Окно опций Фреймы
Поз.
1
Описание
Выбрать инструмент.
Если в поле Внешняя TCP указано True: выбрать заготовку.
Диапазон значений: [1] … [16]
2
Выбрать базу.
Если в поле Внешняя TCP указано True: выбрать стационарный инструмент.
Диапазон значений: [1] … [32]
3
4
9.2.8
Режим интерполяции
False: инструмент монтирован на установочном фланце.
True: инструмент является стационарным.
True: для этого движения система управления роботом определяет осевые моменты. Это необходимо для распознавания столкновения.
False: для этого движения система управления роботом не
определяет осевые моменты. Поэтому распознавание
столкновения для этого движения невозможно.
Окно опции Параметры перемещения (LIN, CIRC, PTP)
Рис. 9-5: Окно опции Параметры перемещения (LIN, CIRC, PTP)
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
219 / 277
KUKA System Software 8.3
Поз.
Описание
1
Ускорение
Относится к указанному в технических данных максимальному значению. Максимальное значение зависит от типа
робота и установленного режима работы.
2
Данное поле отображается только при условии, что во встроенном формуляре было выбрано, что необходимо сглаживание этой точки.
Расстояние до целевой точки, на которой сглаживание начинается раньше всего.
Это расстояние не должно превышать половину расстояния
между начальной и целевой точкой. Если здесь будет введено
большее значение, оно игнорируется, и используется максимальное значение.
3
Данное поле отображается только для движений LIN и CIRC.
Выбрать контроль ориентации.
Стандарт
Hand PTP
Постоянный контроль ориентации
(>>> 8.6 "Контроль ориентации LIN, CIRC" Страница 196)
9.3
Программирование движений Spline
9.3.1
Указания по программированию движений Spline
Все преимущества вида движений Spline можно использовать только
при условии применения блоков Spline.
Блок Spline должен охватывать только один процесс (например, клеевой шов). Несколько процессов в одном блок Spline делают программу труднообозримой и затрудняют внесение изменений.
Если прямые и круговые сегменты заданы заготовкой, следует применять сегменты SLIN и SCIRC. (Исключение: для совсем коротких
прямых применять сегменты SPL.) В остальных случаях применять
сегменты SPL, особенно при коротких расстояниях между точками.
Порядок действий при определении траектории:
a. Сначала заучить или рассчитать несколько характерных точек.
Пример: точки, в которых кривая меняет направление.
b. Проверить траекторию. В тех местах, где нет достаточной точности, ввести дополнительные точки SPL.
Избегать следования сегментов SLIN и/или SCIRC друг за другом, так
как в результате этого скорость зачастую снижается до 0.
Запрограммировать между сегментами SLIN и/или SCIRC сегменты
SPL. Длина сегментов SPL должна быть по меньшей мере > 0,5 мм.
В зависимости от конкретного хода траектории могут также понадобиться намного более длинные сегменты SPL.
220 / 277
Избегать следования точек с одинаковыми декартовыми координатами друг за другом, так как в результате этого скорость зачастую снижается до 0.
Параметры (инструмент, база, скорость и т. д.), присвоенные блоку
Spline, оказывают то же действие, что и до их присвоения блоку
Spline. Однако присвоение их блоку Spline имеет то преимущество,
что в случае выбора записи считываются правильные параметры.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
9 Программирование для группы "Пользов...
Если для сегмента SLIN, SCIRC или SPL не требуется определенная
ориентация, использовать опцию Без ориентации. Тогда система управления роботом рассчитает оптимальную ориентацию для данной
точки, исходя из ориентаций окружающих точек. Это улучшит тактовое время.
Можно изменить рывок. Рывок – это изменение ускорения. Порядок
действий:
a. Сначала использовать значения по умолчанию.
b. Если на малых углах возникают отклонения: уменьшить значения.
Если случается падение скорости или нужная скорость не достигается: повысить значения или увеличить ускорение.
Если робот проходит по точкам, лежащим на одной рабочей поверхности, то при подводе к первой точке возможно столкновение с рабочей поверхностью.
Рис. 9-6: Столкновение с рабочей поверхностью
Во избежание столкновений следовать рекомендациям по переходам SLIN-SPL-SLIN.
(>>> 8.7.5.1 "Переход SLIN-SPL-SLIN" Страница 208)
Рис. 9-7: Предотвращение столкновения с рабочей поверхностью
При работе с блоками PTP-Spline с несколькими сегментами SPTP
может произойти нарушение программных концевых включателей
при выполнении программы, хотя точки находятся в заданных пределах!
В этом случае потребуется переобучение точек, т.е. их нужно будет
еще более удалить от программных концевых выключателей. В качестве альтернативы допускается изменение программных концевых
выключателей, но лишь при условии сохранения необходимой защиты оборудования.
9.3.2
Программирование блока Spline
Описание
Блок Spline позволяет объединять несколько перемещений в одно общее
перемещение. Перемещения, которые могут располагаться в блоке
Spline, называются сегментами Spline. Их настройка выполняется по отдельности.
Блок Spline планируется и выполняется системой управления роботом в
качестве одной записи перемещений.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
221 / 277
KUKA System Software 8.3
Блок CP-Spline может включать в себя сегменты SPL, SLIN и SCIRC.
Блок PTP-Spline может содержать сегменты SPTP.
Блок Spline, не содержащий сегментов, не является командой перемещения. Количество сегментов в блоке ограничено только объемом памяти. Кроме сегментов блок Spline может содержать следующие элементы:
встроенные команды из технологических пакетов, располагающие
функциями Spline;
комментарии и пустые строки.
Блок Spline не может содержать иных команд, например, команд распределения переменных или логических команд.
Начальная точка блока Spline является последней точкой перед
блоком Spline.
Целевая точка блока Spline является последней точкой в блоке
Spline.
Блок Spline не может инициировать останов предварительной процедуры.
Условие
Порядок
действий
Программа выбрана.
Выбран режим работы T1.
1. Установить курсор в строку, после которой должен быть вставлен
блок Spline.
2. Выбрать последовательность меню Команды > Перемещение.
Затем для блока CP-Spline выбрать Блок SPLINE.
Или для блока PTP-Spline выбрать Блок PTP SPLINE.
3. Во встроенном формуляре установить параметры.
(>>> 9.3.2.1 "Встроенный формуляр блока CP-Spline" Страница 222)
(>>> 9.3.2.2 "Встроенный формуляр Блок PTP SPLINE" Страница 223)
9.3.2.1
4.
Нажать кнопку Команда ОК.
5.
Нажать кнопку Откр./закр. каталог. Теперь можно вставлять сегменты Spline в блок.
Встроенный формуляр блока CP-Spline
Рис. 9-8: Встроенный формуляр блока CP-Spline
222 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
9 Программирование для группы "Пользов...
Поз.
Описание
1
Имя блока Spline. Система автоматически задает имя. Имя
может быть перезаписано.
(>>> 9.1 "Имена во встроенных формулярах" Страница 215)
Для редактирования данных движения коснуться стрелки.
Откроется соответствующее окно опции.
(>>> 9.3.2.3 "Окно опции Фреймы (блок CP- и PTP-Spline)"
Страница 224)
2
3
CONT: сглаживание целевой точки.
[пусто]: точный подвод в целевую точку.
Дакартова скорость
4
0.001 … 2 м/с
Имя записи данных движения. Система автоматически задает
имя. Имя может быть перезаписано.
Для редактирования данных движения коснуться стрелки.
Откроется соответствующее окно опции.
(>>> 9.3.2.4 "Окно опции Параметры перемещения (блок CPSpline)" Страница 224)
9.3.2.2
Встроенный формуляр Блок PTP SPLINE
Рис. 9-9: Встроенный формуляр Блок PTP SPLINE
Поз.
Описание
1
Имя блока Spline. Система автоматически задает имя. Имя
может быть перезаписано.
(>>> 9.1 "Имена во встроенных формулярах" Страница 215)
Для редактирования данных движения коснуться стрелки.
Откроется соответствующее окно опции.
(>>> 9.3.2.3 "Окно опции Фреймы (блок CP- и PTP-Spline)"
Страница 224)
2
3
CONT: сглаживание целевой точки.
[пусто]: точный подвод в целевую точку.
Скорость оси
4
1 … 100 %
Имя записи данных движения. Система автоматически задает
имя. Имя может быть перезаписано.
Для редактирования данных движения коснуться стрелки.
Откроется соответствующее окно опции.
(>>> 9.3.2.5 "Окно опции Параметры перемещения (блок
PTP-Spline)" Страница 225)
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
223 / 277
KUKA System Software 8.3
9.3.2.3
Окно опции Фреймы (блок CP- и PTP-Spline)
Рис. 9-10: Окно опции Фреймы (блок CP- и PTP-Spline)
Поз.
1
Описание
Выбрать инструмент.
Способ 2: Если отображается True в поле Внешний TCP: выбрать заготовку.
2
[1] … [16]
Выбрать базу.
Способ 2: Если отображается True в поле Внешний TCP: выбрать стационарный инструмент.
3
9.3.2.4
[1] … [32]
Режим интерполяции:
False: инструмент смонтирован на установочном фланце;
True: инструмент является стационарным.
Окно опции Параметры перемещения (блок CP-Spline)
Рис. 9-11: Окно опции Параметры перемещения (блок CP-Spline)
224 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
9 Программирование для группы "Пользов...
Поз.
Описание
1
Скорость оси. Это значение соотносится с указанным в технических данных максимальным значением.
2
Осевое ускорение. Это значение соотносится с указанным в
технических данных максимальным значением.
3
1 … 100 %
1 … 100 %
Толчок редуктора. Рывок (толчок) – это изменение ускорения.
Это значение соотносится с указанным в технических данных
максимальным значением.
1 … 100 %
4
Выбрать контроль ориентации.
5
Выбрать базовую систему контроля ориентации.
Данный параметр влияет только на сегменты SCIRC (при
наличии).
6
Это поле отображается только при условии, что во встроенном формуляре было выбрано CONT.
Расстояние до целевой точки, на которой сглаживание начинается раньше всего.
Расстояние может быть максимально равно последнему сегменту в Spline. Если имеется только один сегмент, расстояние
может составлять не более половины длины сегмента. Если
здесь будет введено большее значение, оно игнорируется, и
используется максимальное значение.
9.3.2.5
Окно опции Параметры перемещения (блок PTP-Spline)
Рис. 9-12: Окно опции Параметры перемещения (блок PTP-Spline)
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
225 / 277
KUKA System Software 8.3
Поз.
Описание
1
Осевое ускорение. Это значение соотносится с указанным в
технических данных максимальным значением.
2
1 … 100 %
Это поле отображается только при условии, что во встроенном формуляре было выбрано CONT.
Расстояние до целевой точки, на которой сглаживание начинается раньше всего.
Расстояние может быть максимально равно последнему сегменту в Spline. Если имеется только один сегмент, расстояние
может составлять не более половины длины сегмента. Если
здесь будет введено большее значение, оно игнорируется, и
используется максимальное значение.
3
Толчок редуктора. Рывок (толчок) – это изменение ускорения.
Это значение соотносится с указанным в технических данных
максимальным значением.
1 … 100 %
9.3.3
Программирование сегментов блока Spline
9.3.3.1
Программирование сегмента SPL или SLIN
При программировании движений следить за
тем, чтобы при выполнении программы не произошла намотка или повреждение линий энергоснабжения.
Условие
Порядок
действий
Программа выбрана.
Режим работы T1
Формуляр блока CP-Spline открыт.
1. Переместить ТСР в целевую точку.
2. Установить курсор в строку в блоке Spline, после которой должен
быть вставлен сегмент.
3. Выбрать последовательность меню Команды > Перемещение >
SPL или SLIN.
4. Во встроенном формуляре установить параметры.
(>>> 9.3.3.3 "Встроенный формуляр сегмента CP-Spline" Страница 227)
5. Нажать Команда ОК.
9.3.3.2
Программирование сегмента SCIRC
При программировании движений следить за
тем, чтобы при выполнении программы не произошла намотка или повреждение линий энергоснабжения.
Условие
226 / 277
Программа выбрана.
Режим работы T1
Формуляр блока CP-Spline открыт.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
9 Программирование для группы "Пользов...
Порядок
действий
1. Переместить ТСР во вспомогательную точку.
2. Установить курсор в строку в блоке Spline, после которой должен
быть вставлен сегмент.
3. Выбрать последовательность меню Команды > Перемещение >
SCIRC.
4. Во встроенном формуляре установить параметры.
(>>> 9.3.3.3 "Встроенный формуляр сегмента CP-Spline" Страница 227)
5. Нажать Touchup MP.
6. Переместить ТСР в целевую точку.
7. Нажать Команда ОК.
9.3.3.3
Встроенный формуляр сегмента CP-Spline
Рис. 9-13: Встроенный формуляр Сегмент CP-Spline
По умолчанию отображаются не все поля встроенного формуляра. Для
включения и выключения индикации полей предусмотрена кнопка Смена
параметра.
Поз.
Описание
1
Вид перемещения
2
SPL, SLIN или SCIRC
Только для SCIRC: имя вспомогательной точки
Система автоматически задает имя. Имя может быть перезаписано.
(>>> 9.1 "Имена во встроенных формулярах" Страница 215)
3
Имя целевой точки. Система автоматически задает имя. Имя
может быть перезаписано.
Для редактирования данных точки коснуться стрелки. Открывается соответствующее окно опции.
(>>> 9.3.3.6 "Окно опции Фреймы (сегменты CP- и PTPSpline)" Страница 230)
4
Дакартова скорость
По умолчанию для сегмента действует значение блока Spline.
При необходимости здесь можно присвоить сегменту особое
значение. Оно будет действовать только для данного сегмента.
0.001 … 2 м/с
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
227 / 277
KUKA System Software 8.3
Поз.
Описание
5
Имя записи данных движения. Система автоматически задает
имя. Имя может быть перезаписано.
По умолчанию для сегмента действуют значения блока Spline.
При необходимости здесь можно присвоить сегменту особые
значения. Они будут действовать только для данного сегмента.
Для редактирования данных коснуться стрелки. Открывается
соответствующее окно опции.
(>>> 9.3.3.7 "Окно опции Параметры перемещения (сегмент
CP-Spline)" Страница 230)
6
Угол круга
Доступно только в том случае, если был выбран вид перемещения SCIRC.
- 9 999° … + 9 999°
Если задается значение меньше -400° или больше +400°, то
при сохранении встроенного формуляра появляется запрос
на подтверждение или отклонение введенного значения.
7
Имя записи данных с логическими параметрами. Система
автоматически задает имя. Имя может быть перезаписано.
Для редактирования данных коснуться стрелки. Открывается
соответствующее окно опции.
(>>> 9.3.3.9 "Окно опции Логические параметры" Страница 232)
9.3.3.4
Программирование сегмента SPTP
При программировании движений следить за
тем, чтобы при выполнении программы не произошла намотка или повреждение линий энергоснабжения.
Условие
Порядок
действий
Программа выбрана.
Режим работы T1
Формуляр блока PTP-Spline открыт.
1. Переместить ТСР в целевую точку.
2. Установить курсор в строку в блоке Spline, после которой должен
быть вставлен сегмент.
3. Выбрать последовательность меню Команды > Перемещение >
SPTP.
4. Во встроенном формуляре установить параметры.
(>>> 9.3.3.5 "Встроенный формуляр сегмента SPTP" Страница 229)
5. Нажать Команда ОК.
228 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
9 Программирование для группы "Пользов...
9.3.3.5
Встроенный формуляр сегмента SPTP
Рис. 9-14: Встроенный формуляр Сегмент SPTP
По умолчанию отображаются не все поля встроенного формуляра. Для
включения и выключения индикации полей предусмотрена кнопка Смена
параметра.
Поз.
Описание
1
Вид движения SPTP
2
Имя целевой точки. Система автоматически задает имя. Имя
может быть перезаписано.
(>>> 9.1 "Имена во встроенных формулярах" Страница 215)
Для редактирования данных точки коснуться стрелки. Откроется соответствующее окно опции.
(>>> 9.3.3.6 "Окно опции Фреймы (сегменты CP- и PTPSpline)" Страница 230)
3
Скорость оси
По умолчанию для сегмента действует значение блока Spline.
При необходимости здесь можно присвоить сегменту особое
значение. Оно будет действовать только для данного сегмента.
4
1 … 100 %
Имя записи данных движения. Система автоматически задает
имя. Имя может быть перезаписано.
По умолчанию для сегмента действуют значения блока Spline.
При необходимости здесь можно присвоить сегменту особые
значения. Они будут действовать только для данного сегмента.
Для редактирования данных точки коснуться стрелки. Откроется соответствующее окно опции.
(>>> 9.3.3.8 "Окно опции Параметры перемещения (SPTP)"
Страница 231)
5
Имя записи данных с логическими параметрами. Система
автоматически задает имя. Имя может быть перезаписано.
Для редактирования данных коснуться стрелки. Откроется
соответствующее окно опции.
(>>> 9.3.3.9 "Окно опции Логические параметры" Страница 232)
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
229 / 277
KUKA System Software 8.3
9.3.3.6
Окно опции Фреймы (сегменты CP- и PTP-Spline)
Рис. 9-15: Окно опции Фреймы (сегменты CP- и PTP-Spline)
9.3.3.7
Поз.
Описание
1
True: для этого перемещения система управления роботом определяет осевые моменты. Это необходимо для
распознавания столкновения.
False: для этого перемещения система управления роботом не определяет осевые моменты. Поэтому распознавание столкновения для этого перемещения невозможно.
Окно опции Параметры перемещения (сегмент CP-Spline)
Параметры
перемещения
Рис. 9-16: Окно опции Параметры перемещения (сегмент CP-Spline)
Поз.
Описание
1
Скорость оси. Это значение соотносится с указанным в технических данных максимальным значением.
2
3
1 … 100 %
Осевое ускорение. Это значение соотносится с указанным в
технических данных максимальным значением.
1 … 100 %
Рывок редуктора. Рывок (толчок) означает изменение ускорения.
Это значение соотносится с указанным в технических данных
максимальным значением.
230 / 277
1 … 100 %
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
9 Программирование для группы "Пользов...
Поз.
Описание
4
Выбор контроля ориентации.
5
Только для сегментов SCIRC: выбор базовой системы контроля ориентации.
Конфигурация
контура
Рис. 9-17: Конфигурация контура (сегмент SCIRC)
Поз.
Описание
6
Только для сегментов SCIRC: Выбор ориентировочных характеристик во вспомогательной точке
7
Только для сегментов SCIRC: Это поле отображается только
при условии, что во встроенном формуляре было выбрано
ANGLE.
Выбор ориентировочных характеристик в целевой точке
9.3.3.8
Окно опции Параметры перемещения (SPTP)
Рис. 9-18: Окно опции Параметры перемещения (SPTP)
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
231 / 277
KUKA System Software 8.3
Поз.
Описание
1
Осевое ускорение. Это значение соотносится с указанным в
технических данных максимальным значением.
2
1 … 100 %
Данное поле недоступно для сегментов SPTP. При отдельных
перемещениях SPTP поле отображается только при условии,
что во встроенном формуляре было выбрано CONT.
Расстояние до целевой точки, на которой сглаживание начинается раньше всего.
Это расстояние не должно превышать половину расстояния
между начальной и целевой точкой. Если здесь будет введено
большее значение, оно игнорируется, и используется максимальное значение.
3
Толчок редуктора. Рывок – это изменение ускорения.
Это значение соотносится с указанным в технических данных
максимальным значением.
9.3.3.9
Триггер
1 … 100 %
Окно опции Логические параметры
Триггер
Рис. 9-19: Триггер
Сведения о положении точки переключения в случае сглажива
ния отсчетной точки можно найти в инструкции по эксплуатации
и программированию для системных интеграторов. Также там
приводится информация о максимальных пределах смещений.
232 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
9 Программирование для группы "Пользов...
Поз.
1
Описание
При помощи кнопки Выбрать действие > Добавление триггера здесь можно движению присвоить (дополнительный)
триггер. Если это первый триггер для данного движения, эта
команда активирует также поле Триггер.
Для каждого движения возможны макс. 8 триггеров.
(Удалить триггер можно при помощи Выбрать действие >
Удаление триггера.)
2
3
Отсчетная точка триггера
TRUE: Начальная точка
FALSE: Целевая точка
Локальное смещение в отношении целевой или конечной
точки
Отрицательное значение: смещение в направлении начала перемещения
Положительное значение: смещение в сторону конца перемещения
В отношении пространственного смещения может быть также
выполнено обучение. При этом для поля Начальная точка
является отсчетной автоматически устанавливается состояние FALSE.
(>>> 9.3.3.10 "Заучивание пространственного смещения
логических параметров" Страница 236)
4
5
Временное смещение в отношении смещения
Отрицательное значение: смещение в направлении начала перемещения.
Положительное значение: триггер срабатывает по истечении времени.
Инструкция, которую должен запускать триггер. Возможны:
Присваивание значения переменной
Указание: На левой стороне присвоения не должна находиться переменная времени работы.
Инструкция OUT; инструкция PULSE; инструкция
CYCFLAG
Вызов подпрограммы. В этом случае должен быть указан
приоритет.
Пример: my_subprogram() PRIO = 81
В распоряжении имеются приоритеты 1, 2, 4–39, а также
81–128. Приоритеты 40–80 зарезервированы для случаев
автоматического присваивания приоритета системой.
Если система должна автоматически присвоить приоритет, следует установить: PRIO = -1.
Если подпрограммы одновременно вызываются несколькими триггерами, то сначала обрабатывается триггер с наивысшим приоритетом, а затем триггер с более низким
приоритетом. 1 = наивысший приоритет.
Условный
останов
Условный останов
В данной документации приводятся дополнительные сведения
об условном останове.
(>>> 9.3.5 "Условный останов" Страница 242)
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
233 / 277
KUKA System Software 8.3
Рис. 9-20: Обусловленный останов
Поз.
1
2
Описание
Условие останова. Допускается:
глобальная булева переменная;
сигнальное имя;
сравнение;
простая логическая связь: NOT, OR, AND или EXOR.
Условный останов может относиться к начальной или целевой
точке движения.
TRUE: Начальная точка
FALSE: Целевая точка
Если отсчетная точка сглажена, действуют такие же правила,
что и для триггера PATH.
Указание: сведения о сглаживании с триггером PATH можно
найти в инструкции по эксплуатации и программированию для
системных интеграторов.
3
Существует возможность пространственного смещения точки
останова. Для этого здесь необходимо указать нужное расстояние до начальной или целевой точки. Если пространственное смещение не требуется, ввести «0».
Положительное значение: смещение в сторону конца перемещения
Отрицательное значение: смещение в направлении начала перемещения
Существуют ограничения по значению смещения точки останова. Действуют такие же пределы, что и для триггера PATH.
В отношении пространственного смещения может быть также
выполнено обучение. При этом для поля Начальная точка
является отсчетной автоматически устанавливается состояние FALSE.
(>>> 9.3.3.10 "Заучивание пространственного смещения
логических параметров" Страница 236)
Указание: сведения о пределах смещения с триггером PATH
можно найти в инструкции по эксплуатации и программированию для системных интеграторов.
234 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
9 Программирование для группы "Пользов...
Область
неизменного
движения
Область неизменного движения
Область неизменного движения доступно только для сегмен
тов CP-Spline.
В данной документации приводятся дополнительные сведения
об областях неизменного движения.
(>>> 9.3.6 "Область неизменного движения в блоке CP-Spline"
Страница 246)
Рис. 9-21: Область неизменного движения
Поз.
1
Описание
Start: определяет начало области неизменного движения.
End: определяет конец области неизменного движения.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
235 / 277
KUKA System Software 8.3
Поз.
2
Описание
Start и End может относиться к начальной или целевой точке
движения.
TRUE: Start или End относится к начальной точке.
Если начальная точка сглажена, отсчетная точка определяется таким же образом, что и при равномерном сглаживании с триггером PATH.
Указание: сведения о сглаживании с триггером PATH можно найти в инструкции по эксплуатации и программированию для системных интеграторов.
FALSE: Start или End относится к целевой точке.
Если целевая точка сглажена, то Start или End относится
к началу дуги сглаживания.
3
Для начала и конца области неизменного движения существует возможность пространственного смещения. Для этого
здесь необходимо указать нужный участок. Если пространственное смещение не требуется, ввести «0».
Положительное значение: смещение в сторону конца перемещения
Отрицательное значение: смещение в направлении начала перемещения
(>>> 9.3.6.2 "Максимальные пределы" Страница 248)
В отношении пространственного смещения может быть также
выполнено обучение. При этом для поля Начальная точка
является отсчетной автоматически устанавливается состояние FALSE.
(>>> 9.3.3.10 "Заучивание пространственного смещения
логических параметров" Страница 236)
9.3.3.10 Заучивание пространственного смещения логических параметров
Описание
В окне опции Логические параметры можно указать пространственные
смещения для триггера, условного останова и области неизменного движения. Вместо числового значения смещений их можно заучить.
При заучивании смещения поле Начальная точка является от
счетной в соответствующей вкладке автоматически устанавливается на FALSE, т.к. заученное расстояние относится к целевой
точке движения.
Условие
Порядок
действий
Программа выбрана.
Режим работы T1
Точка, для которой должно действовать смещение, уже заучена.
1. Занять нужную позицию посредством TCP.
2. Установить курсор в строку с командой движения, для которой должно быть заучено смещение.
3. Нажать Изменить. Откроется встроенный формуляр команды.
4. Открыть окно опции Логические параметры и выбрать нужную
вкладку.
5. Нажать Выбрать действие, затем нажать одну из следующих кнопок
(в зависимости от того, для чего выполняется заучивание смещения):
236 / 277
Триггер: обучение смещения
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
9 Программирование для группы "Пользов...
Условный останов: обучение смещения
Область неизменного движения: обучение смещения
Расстояние до целевой точки актуальной команды движения принимается в качестве значения пространственного смещения.
6. Сохранить изменение, нажав Команда OK.
9.3.4
Программирование отдельных движений Spline
9.3.4.1
Программирование отдельного движения SLIN
При программировании движений следить за
тем, чтобы при выполнении программы не произошла намотка или повреждение линий энергоснабжения.
Условие
Порядок
действий
Программа выбрана.
Выбран режим работы T1.
1. Переместить ТСР в целевую точку.
2. Установить курсор в строку, после которой должно быть вставлено
движение.
3. Выбрать Команды > Перемещение > SLIN.
4. Во встроенном формуляре установить параметры.
(>>> 9.3.4.2 "Встроенный формуляр SLIN" Страница 237)
5. Нажать Команда ОК.
9.3.4.2
Встроенный формуляр SLIN
Рис. 9-22: Встроенный формуляр SLIN (отдельное перемещение)
Поз.
Описание
1
Вид перемещения SLIN
2
Имя целевой точки. Система автоматически задает имя. Имя
может быть перезаписано.
(>>> 9.1 "Имена во встроенных формулярах" Страница 215)
Для редактирования данных точки коснуться стрелки. Открывается соответствующее окно опции.
(>>> 9.2.7 "Окно опций Фреймы" Страница 219)
3
4
CONT: сглаживание целевой точки.
[пусто]: точный подвод в целевую точку.
Скорость
0,001 … 2 м/с
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
237 / 277
KUKA System Software 8.3
Поз.
Описание
5
Имя записи данных перемещения. Система автоматически
задает имя. Имя может быть перезаписано.
Для редактирования данных точки коснуться стрелки. Открывается соответствующее окно опции.
(>>> 9.3.4.3 "Окно опции Параметры перемещения (SLIN)"
Страница 238)
6
Индикацию этого окна можно включить и выключить посредством Смена параметра.
Имя записи данных с логическими параметрами. Система
автоматически задает имя. Имя может быть перезаписано.
Для редактирования данных коснуться стрелки. Открывается
соответствующее окно опции.
(>>> 9.3.3.9 "Окно опции Логические параметры" Страница 232)
9.3.4.3
Окно опции Параметры перемещения (SLIN)
Рис. 9-23: Окно опции Параметры перемещения (SLIN)
Поз.
Описание
1
Скорость оси. Это значение соотносится с указанным в технических данных максимальным значением.
2
3
1 … 100 %
Осевое ускорение. Это значение соотносится с указанным в
технических данных максимальным значением.
1 … 100 %
Толчок редуктора. Рывок (толчок) – это изменение ускорения.
Это значение соотносится с указанным в технических данных
максимальным значением.
238 / 277
1 … 100 %
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
9 Программирование для группы "Пользов...
Поз.
Описание
4
Выбрать контроль ориентации.
5
Это поле отображается только при условии, что во встроенном формуляре было выбрано CONT.
Расстояние до целевой точки, на которой сглаживание начинается раньше всего.
Это расстояние не должно превышать половину расстояния
между начальной и целевой точкой. Если здесь будет введено
большее значение, оно игнорируется, и используется максимальное значение.
9.3.4.4
Программирование отдельного движения SCIRC
При программировании движений следить за
тем, чтобы при выполнении программы не произошла намотка или повреждение линий энергоснабжения.
Условие
Порядок
действий
Программа выбрана.
Выбран режим работы T1.
1. Переместить ТСР во вспомогательную точку.
2. Установить курсор в строку, после которой должно быть вставлено
движение.
3. Выбрать последовательность меню Команды > Перемещение >
SCIRC.
4. Во встроенном формуляре установить параметры.
(>>> 9.3.4.5 "Встроенный формуляр SCIRC" Страница 239)
5. Нажать Touchup MP.
6. Переместить ТСР в целевую точку.
7. Нажать Команда ОК.
9.3.4.5
Встроенный формуляр SCIRC
Рис. 9-24: Встроенный формуляр SCIRC (отдельное перемещение)
Поз.
Описание
1
Вид движения SCIRC
2
Имя вспомогательной точки
Система автоматически задает имя. Имя может быть перезаписано.
(>>> 9.1 "Имена во встроенных формулярах" Страница 215)
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
239 / 277
KUKA System Software 8.3
Поз.
Описание
3
Имя целевой точки
Система автоматически задает имя. Имя может быть перезаписано.
Для редактирования данных точки коснуться стрелки. Открывается соответствующее окно опции.
(>>> 9.2.7 "Окно опций Фреймы" Страница 219)
4
5
CONT: сглаживание целевой точки.
[пусто]: точный подвод в целевую точку.
Скорость
6
0.001 … 2 м/с
Имя записи данных движения. Система автоматически задает
имя. Имя может быть перезаписано.
Для редактирования данных точки коснуться стрелки. Открывается соответствующее окно опции.
(>>> 9.3.4.6 "Окно опции Параметры перемещения (SCIRC)"
Страница 240)
7
Угол круга
- 9 999° … + 9 999°
Если задается угол круга меньше -400° или больше +400°, то
при сохранении встроенного формуляра появляется запрос
на подтверждение или отклонение введенного значения.
8
Индикацию этого окна можно включить и выключить посредством Смена параметра.
Имя записи данных с логическими параметрами. Система
автоматически задает имя. Имя может быть перезаписано.
Для редактирования данных коснуться стрелки. Открывается
соответствующее окно опции.
(>>> 9.3.3.9 "Окно опции Логические параметры" Страница 232)
9.3.4.6
Окно опции Параметры перемещения (SCIRC)
Параметры
перемещения
Рис. 9-25: Параметры перемещения (SCIRC)
240 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
9 Программирование для группы "Пользов...
Поз.
Описание
1
Скорость оси. Это значение соотносится с указанным в технических данных максимальным значением.
2
Осевое ускорение. Это значение соотносится с указанным в
технических данных максимальным значением.
3
1 … 100 %
1 … 100 %
Рывок редуктора. Рывок (толчок) означает изменение ускорения.
Это значение соотносится с указанным в технических данных
максимальным значением.
1 … 100 %
4
Выбор контроля ориентации.
5
Выбор базовой системы контроля ориентации.
6
Это поле отображается только при условии, что во встроенном формуляре была выбрана опция CONT.
Расстояние до целевой точки, на которой сглаживание начинается раньше всего.
Это расстояние не должно превышать половину расстояния
между начальной и целевой точкой. Если здесь будет введено
большее значение, оно игнорируется, и используется максимальное значение.
Конфигурация
контура
Рис. 9-26: Конфигурация контура (SCIRC)
Поз.
Описание
7
Выбор ориентировочных характеристик во вспомогательной
точке
8
Это поле отображается только при условии, что во встроенном формуляре было выбрано ANGLE.
Выбор ориентировочных характеристик в целевой точке
9.3.4.7
Программирование отдельного движения SPTP
При программировании движений следить за
тем, чтобы при выполнении программы не произошла намотка или повреждение линий энергоснабжения.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
241 / 277
KUKA System Software 8.3
Условие
Порядок
действий
Программа выбрана.
Выбран режим работы T1.
1. Переместить ТСР в целевую точку.
2. Установить курсор в строку, после которой должно быть вставлено
движение.
3. Выбрать Команды > Перемещение > SPTP.
4. Во встроенном формуляре установить параметры.
(>>> 9.3.4.8 "Встроенный формуляр SPTP" Страница 242)
5. Нажать Команда ОК.
9.3.4.8
Встроенный формуляр SPTP
Рис. 9-27: Встроенный формуляр SPTP (отдельное движение)
Поз.
Описание
1
Вид движения SPTP
2
Имя целевой точки. Система автоматически задает имя. Имя
может быть перезаписано.
(>>> 9.1 "Имена во встроенных формулярах" Страница 215)
Для редактирования данных точки коснуться стрелки. Откроется соответствующее окно опции.
(>>> 9.2.7 "Окно опций Фреймы" Страница 219)
3
CONT: сглаживание целевой точки.
[пусто]: точный подвод в целевую точку.
4
Скорость:
5
1 … 100 %
Имя записи данных движения. Система автоматически задает
имя. Имя может быть перезаписано.
Для редактирования данных точки коснуться стрелки. Откроется соответствующее окно опции.
(>>> 9.3.3.8 "Окно опции Параметры перемещения (SPTP)"
Страница 231)
6
Индикацию этого окна можно включить и выключить посредством Смена параметра.
Имя записи данных с логическими параметрами. Система
автоматически задает имя. Имя может быть перезаписано.
Для редактирования данных коснуться стрелки. Откроется
соответствующее окно опции.
(>>> 9.3.3.9 "Окно опции Логические параметры" Страница 232)
9.3.5
Условный останов
Описание
242 / 277
«Условный останов» позволяет пользователю задавать на траектории
место, в котором робот будет останавливаться в случае выполнения опСостояние на: 20.01.2015 Версия: KSS 8.3 END V4
9 Программирование для группы "Пользов...
ределенного условия. Такое место называется точкой останова. Если условие больше не выполняется, робот продолжает движение.
Во время перемещения система управления роботом рассчитывает точку, в которой она должна затормозить позже всего, чтобы остановиться в
точке останова. Начиная с этой точки (точка торможения) она проверяет,
выполняется условие или нет.
Если условие в точке торможения выполняется, робот тормозит, чтобы остановиться в точке останова.
Если же перед достижением точки останова условие снова переходит в состояние «не выполняется», робот ускоряется и не останавливается.
Если условие в точке торможения не выполняется, робот продолжает
движение без торможения.
Принципиально можно запрограммировать сколько угодно условных остановов. В то же время, допускается пересечение не более 10 участков
«Точка торможения → точка останова».
Во время торможения система управления роботом отображает в T1/T2
следующее сообщение: Условный останов активирован (строка {Номер строки}).
(>>> 9.3.5.2 "Условие останова: пример и тормозные характеристики"
Страница 245)
Программирование
Программирование с синтаксисом KRL:
Посредством инструкции STOP WHEN PATH
Программирование со встроенными формулярами:
В блоке Spline (CP и PTP) или в отдельной записи Spline:
в окне опции Логические параметры
Перед блоком Spline (CP и PTP):
посредством встроенного формуляра Spline Stop Condition
9.3.5.1
Встроенный формуляр Spline Stop Condition
Этот встроенный формуляр может использоваться только блоком Spline.
Между встроенным формуляром и блоком Spline могут находиться другие инструкции или команды, но не команды движения.
Рис. 9-28: Встроенный формуляр Spline Stop Condition
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
243 / 277
KUKA System Software 8.3
Поз.
Описание
1
Точка, к которой относится условный останов
С элементом ONSTART: последняя точка перед блоком
Spline
Без элемента ONSTART: последняя точка в блоке Spline
Если Spline сглажен, действуют такие же правила, что и для
триггера PATH.
Указание: сведения о сглаживании с триггером PATH можно
найти в инструкции по эксплуатации и программированию для
системных интеграторов.
Элемент ONSTART может быть задан и удален посредством
кнопки Перекл. OnStart.
2
Существует возможность пространственного смещения точки
останова. Для этого здесь необходимо указать нужное расстояние до отсчетной точки. Если пространственное смещение
не требуется, ввести «0».
Положительное значение: смещение в сторону конца перемещения
Отрицательное значение: смещение в направлении начала перемещения
Существуют ограничения по значению смещения точки останова. Действуют такие же пределы, что и для триггера PATH.
В отношении пространственного смещения может быть также
выполнено обучение.
(>>> "Запись Path" Страница 244)
3
Запись Path
Условие останова. Допускается:
глобальная булева переменная;
сигнальное имя;
сравнение;
простая логическая связь: NOT, OR, AND или EXOR.
Кнопка
Описание
Запись Path
Если существует необходимость в смещении,
значение не обязательно указывать в числовом формате во встроенном формуляре. Это
можно сделать и методом обучения. Данная
операция выполняется посредством Запись
Path.
При обучении смещения элемент ONSTART
(если он установлен во встроенном формуляре) автоматически удаляется, т.к. полученное
методом обучения удаление всегда относится к целевой точке движения.
Порядок обучения аналогичен порядку операций для окна опции Логические параметры.
(>>> 9.3.3.10 "Заучивание пространственного
смещения логических параметров" Страница 236)
244 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
9 Программирование для группы "Пользов...
9.3.5.2
Пример
Условие останова: пример и тормозные характеристики
По умолчанию отступы не предлагаются и используются здесь для повышения наглядности обзора.
Рис. 9-29: Пример внутреннего программирования (формуляры открыты)
Строка
Описание
4
Если вход $IN[77] FALSE, то робот останавливается в
50 мм после точки P2 и ожидает состояния $IN[77] TRUE.
Рис. 9-30: Пример STOP WHEN PATH
Точка
Описание
BP
Точка торможения (Brake Point): здесь робот должен
начинать торможение, чтобы остановиться в точке останова.
Начиная с этой точки система управления роботом проверяет, выполняется условие останова или нет.
Позиция BP зависит от скорости и коррекции и не распознается пользователем.
SP
Точка останова (Stop Point)
Участок P2 → SP имеет длину 50 мм.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
245 / 277
KUKA System Software 8.3
Тормозные
характеристики
Ситуация в BP
Поведение робота
$IN[77] == FALSE
Робот тормозит и останавливается в SP.
$IN[77] == TRUE
Робот не тормозит и не останавливается в SP. Программа выполняется, как если бы инструкция
STOP WHEN PATH отсутствовала.
1. В BP установлено $IN[77] ==
FALSE.
1. Робот тормозит в BP.
2. Между BP и SP вход переключается на TRUE.
1. В BP установлено $IN[77] ==
TRUE.
2. Между BP и SP вход переключается на FALSE.
2. При переключении входа на
TRUE робот снова ускоряется
и не останавливается в SP.
1. Робот не тормозит в BP.
2. При переключении входа на
FALSE робот выполняет останов в режиме АВАРИЙНОГО
ОСТАНОВА с соблюдением
траектории и останавливается в непредсказуемой точке.
Если условия останова выполняются только после того, как робот уже
прошел BP, время для остановки в SP со стандартной тормозной характеристикой утеряно. В этом случае робот выполняет останов в режиме
АВАРИЙНОГО ОСТАНОВА с соблюдением траектории и останавливается в непредсказуемой точке.
9.3.6
Если робот при АВАРИЙНОМ ОСТАНОВЕ останавливается после
SP, возобновление программы возможно только после того, как больше не будут выполняться условия останова.
Если робот при АВАРИЙНОМ ОСТАНОВЕ с соблюдением траектории останавливается перед SP, в случае возобновления программы
происходит следующее:
если условия останова больше не выполняются: робот перемещается дальше;
если условия останова еще выполняются: робот перемещается
до SP и останавливается там.
Область неизменного движения в блоке CP-Spline
Описание
В блоке CP-Spline может быть определена область, в которой робот будет стабильно поддерживать запрограммированную скорость (если это
возможно). Такая область называется «областью неизменного движения».
На каждый блок CP-Spline может быть определена 1 область неизменного движения.
Область неизменного движения определяется командой Start и командой End.
Область не может выходить за пределы блока Spline.
Область может быть сколь угодно малой.
Если поддержание запрограммированной скорости на неизменном значении невозможно, система управления роботом сигнализирует об этом
соответствующим сообщением во время выполнения программы.
Область неизменного движения по нескольким сегментам:
246 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
9 Программирование для группы "Пользов...
Область неизменного движения может распространяться на несколько
сегментов с различными запрограммированными скоростями. В этом
случае для всей области действует наименьшая скорость.
В сегментах с более высокой запрограммированной скоростью движение
тоже будет выполняться с наименьшей скоростью. Сообщение о недостижении заданной скорости в этом случае не выводится. Сигнализируется только невозможность поддержания наименьшей скорости.
Программирование
Существуют следующие возможности программирования области неизменного движения:
При программировании с синтаксисом KRL: посредством инструкции
CONST_VEL
При программировании со встроенными формулярами:
начало и конец области задают у соответствующего сегмента CP, в
окне опции Логические параметры.
9.3.6.1
Выбор строки в область неизменного движения
Описание
При выборе записи в область неизменного движения система управления роботом игнорирует данный выбор, о чем выводится соответствующее сообщение. Движения выполняются так, как если бы область
неизменного движения не была запрограммирована.
Выбором записи в область неизменного движения считается выбор записи в участок траектории, определенный значениями смещения. При этом
не имеет значения, в каких записях движения запрограммированы начало и конец области.
Пример
Рис. 9-31: Пример области неизменного движения (внутреннее программирование)
Формуляры в программе открыты. По умолчанию отступы не предлагаются и используются здесь для повышения наглядности обзора.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
247 / 277
KUKA System Software 8.3
В качестве начала области неизменного движения в программе опреде
лена точка P1. В качестве конца определена точка P4. Чтобы определить, что подходит для выбора в качестве записи в область неизменного
движения, решающим фактором является расположение данной области на траектории:
Рис. 9-32: Пример области неизменного движения (траектория)
Что подходит для выбора в качестве записи в область неизменного
движения?
9.3.6.2
Выбор записи в точку …
P1
P2
P3
P4
= в области неизменного движения?
нет
нет
да
нет
Максимальные пределы
Если начальная и/или целевая точка блока Spline является точным
остановом:
Область неизменного движения начинается самое раннее в начальной точке.
Область неизменного движения заканчивается самое позднее в целевой точке.
Если значение сдвига приводит к нарушению этих пределов, система управления роботом автоматически уменьшает смещение и выводит следующее сообщение: CONST_VEL {Start/End} = {Смещение} не
реализуемо, используется {Новое смещение}.
Система управления роботом уменьшает смещение настолько, чтобы
возникла область, в которой можно будет поддерживать запрограммированную скорость на неизменном уровне. То есть: она не обязательно
смещает предел точно на начальную или целевую точку блока Spline –
смещение может быть выполнено и в направлении внутрь.
Такое же сообщение поступает, если область изначально располагается
в пределах блока Spline, однако смещение не позволяет поддерживать
заданную скорость. В этом случае система управления роботом тоже
уменьшает смещение.
Если начальная и/или целевая точка блока Spline сглажена:
248 / 277
Область неизменного движения начинается самое раннее в начале
дуги сглаживания начальной точки.
Область неизменного движения завершается самое позднее в начале дуги сглаживания целевой точки.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
9 Программирование для группы "Пользов...
Рис. 9-33: Максимальные пределы при сглаженном SPLINE/
ENDSPLINE
Если смещение таково, что будет происходить сглаживание этих пределов, система управления роботом автоматически устанавливает предел
на начало соответствующей дуги сглаживания. Сообщение не выводится.
9.4
Изменение параметров движения
Условие
Порядок
действий
Программа выбрана.
Выбран режим работы T1.
1. Установить курсор в строку с командой, которая должна быть изменена.
2. Нажать кнопку Изменить. Открывается встроенный формуляр команды.
3. Изменить параметры.
4. Сохранить изменения, нажав кнопку Команда OK.
9.5
Повторное программирование точки
Описание
Координаты заученной точки могут быть изменены. Для этого переместить робот в нужную новую позицию и переписать прежнюю точку новой
позицией.
Условие
Программа выбрана.
Выбран режим работы T1.
Порядок
действий
1. Занять нужную позицию посредством TCP.
2. Установить курсор в строку с командой движения, которая должна
быть изменена.
3. Нажать кнопку Изменить. Открывается встроенный формуляр команды.
4. Для движений PTP и LIN: нажать кнопку Touch Up, чтобы принять текущую позицию TCP в качестве новой целевой точки.
Для движений CIRC:
нажать кнопку Touchup HP, чтобы принять текущую позицию TCP
в качестве новой вспомогательной точки;
или нажать кнопку Touchup ZP, чтобы принять текущую позицию
TCP в качестве новой целевой точки.
5. Подтвердить процедуру, ответив Да на запрос.
6. Сохранить изменения, нажав кнопку Команда OK.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
249 / 277
KUKA System Software 8.3
9.6
Программирование логических команд
9.6.1
Входы/выходы
Цифровые входы/выходы
Система управления роботом может управлять максимум 8192 цифровыми входами и 8192 цифровыми выходами. По умолчанию для использования предлагается 4096 входа/выхода.
Аналоговые входы/выходы
Система управления роботом может управлять 32 аналоговыми входами
и 32 аналоговыми выходами.
Управление входами/выходами осуществляется с помощью следующих
системных переменных:
Входы
Выходы
Цифровые
$IN[1] … $IN[8192]
$OUT[1] … $OUT[8192]
Аналоговые
$ANIN[1] … $ANIN[32]
$ANOUT[1] … $ANOUT[32]
$ANIN[…] указывает входное напряжение, адаптированное до диапазона
от -1.0 до +1.0. Фактическое напряжение зависит от настроек аналогового модуля.
Посредством $ANOUT[…] можно задать аналоговое напряжение. Для
$ANOUT[…] могут устанавливаться значения от -1.0 до +1.0. Фактическое созданное напряжение зависит от настроек аналогового модуля. При
попытке задания напряжений за пределами диапазона значений система
управления роботом выводит следующее сообщение: Ограничение
{Сигнальное имя}
9.6.2
Установка цифрового выхода – OUT
Условие
Порядок
действий
Программа выбрана.
Выбран режим работы T1.
1. Установить курсор в строку, после которой должна быть вставлена
логическая команда.
2. Выбрать последовательность меню Команды > Логика > OUT >
OUT.
3. Во встроенном формуляре установить параметры.
(>>> 9.6.3 "Встроенный формуляр OUT" Страница 250)
4. Сохранить команду, нажав кнопку Команда OK.
9.6.3
Встроенный формуляр OUT
Данная команда устанавливает цифровой выход.
Рис. 9-34: Встроенный формуляр OUT
250 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
9 Программирование для группы "Пользов...
Поз.
Описание
1
Номер выхода
2
Если у выхода есть имя, это имя отображается.
Только для группы пользователей «Эксперты»:
нажатием на кнопку Описание можно ввести имя. Имя задается свободно.
3
4
9.6.4
Состояние, в которое переключается выход
TRUE
FALSE
CONT: обработка в предварительном выполнении;
[пусто]: обработка с остановом предварительного выполнения.
Установка импульсного выхода – PULSE
Условие
Порядок
действий
Программа выбрана.
Выбран режим работы T1.
1. Установить курсор в строку, после которой должна быть вставлена
логическая команда.
2. Выбрать последовательность меню Команды > Логика > OUT >
PULSE.
3. Во встроенном формуляре установить параметры.
(>>> 9.6.5 "Встроенный формуляр PULSE" Страница 251)
4. Сохранить команду, нажав кнопку Команда OK.
9.6.5
Встроенный формуляр PULSE
Данная команда устанавливает импульс определенной длины.
Рис. 9-35: Встроенный формуляр PULSE
Поз.
Описание
1
Номер выхода
2
Если у выхода есть имя, это имя отображается.
Только для группы пользователей «Эксперты»:
нажатием на кнопку Описание можно ввести имя. Имя задается свободно.
3
4
5
Состояние, в которое переключается выход
TRUE: уровень «High»
FALSE: уровень «Low»
CONT: обработка в предварительном выполнении
[пусто]: обработка с остановом предварительного выполнения
Длина импульса
0.10 … 3.00 с
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
251 / 277
KUKA System Software 8.3
9.6.6
Установка аналогового выхода — ANOUT
Условие
Порядок
действий
Программа выбрана.
Выбран режим работы T1.
1. Установить курсор в строку, после которой должна быть вставлена
команда.
2. Выбрать пункт Команды > Аналоговый вывод > Статический или
Динамический.
3. Во встроенном формуляре установить параметры.
(>>> 9.6.7 "Встроенный формуляр ANOUT статический" Страница 252)
(>>> 9.6.8 "Встроенный формуляр ANOUT динамический" Страница 252)
4. Сохранить команду, нажав кнопку Команда OK.
9.6.7
Встроенный формуляр ANOUT статический
Данная команда устанавливает статический аналоговый выход. Напряжение посредством коэффициента устанавливается на постоянную величину. Фактическое значение напряжения зависит от использованного
аналогового модуля. Например, модуль 10 В при коэффициенте 0,5
обеспечивает напряжение 5 В.
ANOUT приводит к останову предварительной процедуры.
Рис. 9-36: Встроенный формуляр ANOUT статический
Поз.
Описание
1
Номер аналогового выхода
2
Коэффициент для напряжения
9.6.8
CHANNEL_1 – CHANNEL_32
0–1 (ступени: 0.01)
Встроенный формуляр ANOUT динамический
Эта команда включает или выключает динамический аналоговый выход.
Одновременно могут быть включены максимум 4 динамических аналоговых выхода. ANOUT приводит к останову предварительной процедуры.
Напряжение устанавливается посредством коэффициента. Фактическое
значение напряжения зависит от следующих значений:
скорость или функциональный генератор;
Например, скорость 1 м/с при коэффициенте 0,5 дает напряжение
5 В.
смещение.
Например, смещение +0,15 для напряжения 0,5 В дает напряжение
6,5 В.
252 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
9 Программирование для группы "Пользов...
Рис. 9-37: Встроенный формуляр ANOUT динамический
Поз.
1
2
Описание
Включение или выключение аналогового выхода
ON
OFF
Номер аналогового выхода
3
4
5
Коэффициент для напряжения
0–10 (ступени: 0.01)
VEL_ACT: напряжение зависит от скорости.
TECHVAL[1] – TECHVAL[6]: напряжение управляется
функциональным генератором.
Значение, на которое повышается или понижается напряжение
6
-1 – +1 (ступени: 0.01)
Время, на которое сигнал замедляется (+) или подается
раньше (-)
9.6.9
CHANNEL_1 – CHANNEL_32
-0,2 – +0,5 с
Программирование времени ожидания — WAIT
Условие
Порядок
действий
Программа выбрана.
Выбран режим работы T1.
1. Установить курсор в строку, после которой должна быть вставлена
логическая команда.
2. Выбрать последовательность меню Команды > Логика > WAIT.
3. Во встроенном формуляре установить параметры.
(>>> 9.6.10 "Встроенный формуляр WAIT" Страница 253)
4. Сохранить команду, нажав кнопку Команда OK.
9.6.10
Встроенный формуляр WAIT
С помощью формуляра WAIT можно запрограммировать время ожидания. Движение робота задерживается на запрограммированное время.
WAIT всегда приводит к останову предварительной процедуры.
Рис. 9-38: Встроенный формуляр WAIT
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
253 / 277
KUKA System Software 8.3
Поз.
1
Описание
Время ожидания
9.6.11
≥0с
Программирование зависимой от сигнала функции ожидания — WAITFOR
Условие
Порядок
действий
Программа выбрана.
Выбран режим работы T1.
1. Установить курсор в строку, после которой должна быть вставлена
логическая команда.
2. Выбрать последовательность меню Команды > Логика > WAITFOR.
3. Во встроенном формуляре установить параметры.
(>>> 9.6.12 "Встроенный формуляр WAITFOR" Страница 254)
4. Сохранить команду, нажав кнопку Команда OK.
9.6.12
Встроенный формуляр WAITFOR
Данная команда устанавливает зависимую от сигнала функцию ожидания.
При необходимости могут быть логически связаны несколько сигналов
(максимум 12). Если добавляется создание связи, то во встроенном формуляре добавляются поля для дополнительных сигналов и для других
связей.
Рис. 9-39: Встроенный формуляр WAITFOR
254 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
9 Программирование для группы "Пользов...
Поз.
1
Описание
Добавить внешнюю связь. Оператор находится между заключенными в скобки выражениями:
AND;
OR;
EXOR.
Добавить NOT.
NOT;
[пусто].
Ввести нужный оператор с помощью соответствующей экранной кнопки.
2
Добавить внутреннюю связь. Оператор находится внутри
заключенного в скобки выражения:
AND;
OR;
EXOR.
Добавить NOT.
NOT;
[пусто].
Ввести нужный оператор с помощью соответствующей экранной кнопки.
3
Ожидаемый сигнал:
IN;
OUT;
CYCFLAG;
TIMER;
FLAG.
4
Номер сигнала
5
Если у сигнала имеется имя, это имя отображается.
Только для группы пользователей «Эксперты»:
нажатием на кнопку Описание можно ввести имя. Имя задается свободно.
6
9.6.13
CONT: обработка в предварительном выполнении;
[пусто]: обработка с остановом предварительного выполнения.
Переключение на траектории – SYN OUT
Условие
Порядок
действий
Программа выбрана.
Выбран режим работы T1.
1. Установить курсор в строку, после которой должна быть вставлена
логическая команда.
2. Выбрать последовательность меню Команды > Логика > OUT > SYN
OUT.
3. Во встроенном формуляре установить параметры.
(>>> 9.6.14 "Встроенный формуляр SYN OUT, опция START/END"
Страница 256)
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
255 / 277
KUKA System Software 8.3
(>>> 9.6.15 "Встроенный формуляр SYN OUT, опция PATH" Страница 258)
4. Сохранить команду, нажав кнопку Команда OK.
9.6.14
Встроенный формуляр SYN OUT, опция START/END
Операция переключения может быть запущена относительно начальной
или целевой точки движения. Операция переключения может быть смещена по времени. Движением может быть LIN, CIRC или PTP.
Случаи применения для примера:
закрывание или открывание сварочных клещей при точечной сварке;
включение или выключение сварочного тока при сварке по контуру;
подключение или отключение объемного тока при склеивании или
герметизации.
Рис. 9-40: Встроенный формуляр SYN OUT, опция START/END
Поз.
Описание
1
Номер выхода
2
Если у выхода есть имя, это имя отображается.
Только для группы пользователей «Эксперты»:
нажатием на кнопку Описание можно ввести имя. Имя задается свободно.
3
4
5
Состояние, в которое переключается выход
TRUE
FALSE
Точка, к которой относится SYN OUT:
START: начальная точка движения
END: целевая точка движения
Временное смещение операции переключения.
-1 000 … +1 000 мс
Указание. заданное время является абсолютным. Таким
образом, точка переключения изменяется в зависимости от
скорости робота.
Пример 1
Точка запуска движения и целевая точка являются точками точного останова.
LIN P1 VEL=0.3m/s CPDAT1
LIN P2 VEL=0.3m/s CPDAT2
SYN OUT 1 '' State= TRUE at START Delay=20ms
SYN OUT 2 '' State= TRUE at END Delay=-20ms
LIN P3 VEL=0.3m/s CPDAT3
LIN P4 VEL=0.3m/s CPDAT4
256 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
9 Программирование для группы "Пользов...
Рис. 9-41
OUT 1 и OUT 2 приблизительно указывают позиции, в которых происходит переключение. Пунктирные линии указывают границы переключения.
Границы переключения:
START: точка переключения может быть задержана максимум до точки точного останова Р3 (+ мс);
END: точка переключения может быть смещена вперед максимум до
точки точного останова Р2 (- мс).
Если для временного смещения задаются более высокие значения, система управления автоматически переключается на границе переключения.
Пример 2
Начальная точка движения является точкой точного останова, целевая
точка сглажена.
LIN P1 VEL=0.3m/s CPDAT1
LIN P2 VEL=0.3m/s CPDAT2
SYN OUT 1 '' State= TRUE at START Delay=20ms
SYN OUT 2 '' State= TRUE at END Delay=-20ms
LIN P3 CONT VEL=0.3m/s CPDAT3
LIN P4 VEL=0.3m/s CPDAT4
Рис. 9-42
OUT 1 и OUT 2 приблизительно указывают позиции, в которых происходит переключение. Пунктирные линии указывают границы переключения. M = середина зоны сглаживания.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
257 / 277
KUKA System Software 8.3
Границы переключения:
START: точка переключения может быть задержана максимум до начала зоны сглаживания Р3 (+ мс).
END: точка переключения может быть смещена вперед максимум до
начала зоны сглаживания Р3 (- мс).
Точка переключения может быть задержана максимум до конца зоны
сглаживания Р3 (+).
Если для временного смещения задаются более высокие значения, система управления автоматически переключается на границе переключения.
Пример 3
Точка запуска движения и целевая точка сглажены.
LIN P1 VEL=0.3m/s CPDAT1
LIN P2 CONT VEL=0.3m/s CPDAT2
SYN OUT 1 '' State= TRUE at START Delay=20ms
SYN OUT 2 '' State= TRUE at END Delay=-20ms
LIN P3 CONT VEL=0.3m/s CPDAT3
LIN P4 VEL=0.3m/s CPDAT4
Рис. 9-43
OUT 1 и OUT 2 приблизительно указывают позиции, в которых происходит переключение. Пунктирные линии указывают границы переключения. M = середина зоны сглаживания.
Границы переключения:
START: ближайшее возможное положение точки переключения – в
конце зоны сглаживания Р2.
Точка переключения может быть задержана максимум до начала
зоны сглаживания Р3 (+ мс).
END: точка переключения может быть смещена вперед максимум до
начала зоны сглаживания Р3 (- мс).
Точка переключения может быть задержана максимум до конца зоны
сглаживания Р3 (+).
Если для временного смещения задаются более высокие значения, система управления автоматически переключается на границе переключения.
9.6.15
Встроенный формуляр SYN OUT, опция PATH
Операция переключения относится к целевой точке движения. Операция
переключения может быть смещена в пространстве и по времени. Движением может быть LIN или CIRC. Движение PTP недопустимо.
258 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
9 Программирование для группы "Пользов...
Рис. 9-44: Встроенный формуляр SYN OUT, опция PATH
Поз.
Описание
1
Номер выхода
2
Если у выхода есть имя, это имя отображается.
Только для группы пользователей «Эксперты»:
нажатием на кнопку Описание можно ввести имя. Имя задается свободно.
3
Состояние, в которое переключается выход
TRUE
FALSE
4
PATH: SYN OUT относится к целевой точке движения.
5
Это поле отображается на дисплее только если выбран PATH.
Удаление точки переключения от целевой точки
6
-2 000 … +2 000 мм
Временное смещение операции переключения.
-1 000 … +1 000 мс
Указание. заданное время является абсолютным. Таким
образом, точка переключения изменяется в зависимости от
скорости робота.
Пример 1
Начальная точка движения является точкой точного останова, целевая
точка сглажена.
LIN P1 VEL=0.3m/s CPDAT1
SYN OUT 1 '' State= TRUE at START PATH=20mm Delay=-5ms
LIN P2 CONT VEL=0.3m/s CPDAT2
LIN P3 CONT VEL=0.3m/s CPDAT3
LIN P4 VEL=0.3m/s CPDAT4
Рис. 9-45
OUT 1 приблизительно указывает позицию, в которой происходит переключение. Пунктирные линии указывают границы переключения. M = середина зоны сглаживания.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
259 / 277
KUKA System Software 8.3
Границы переключения:
точка переключения может быть смещена вперед, но не далее точки
точного останова Р1.
Точка переключения может быть задержана максимум до следующей
точки точного останова Р4. Если бы точкой точного останова была
Р3, то задержка точки переключения была бы возможной максимум
до Р3.
Если для пространственного или временного смещения задаются более
высокие значения, система управления автоматически переключается
на границе переключения.
Пример 2
Точка запуска движения и целевая точка сглажены.
LIN P1 CONT VEL=0.3m/s CPDAT1
SYN OUT 1 '' State= TRUE at START PATH=20mm Delay=-5ms
LIN P2 CONT VEL=0.3m/s CPDAT2
LIN P3 CONT VEL=0.3m/s CPDAT3
LIN P4 VEL=0.3m/s CPDAT4
Рис. 9-46
OUT 1 приблизительно указывает позицию, в которой происходит переключение. Пунктирные линии указывают границы переключения. M = середина зоны сглаживания.
Границы переключения:
точка переключения может быть смещена вперед, но не далее начала зоны сглаживания Р1;
точка переключения может быть задержана максимум до следующей
точки точного останова Р4. Если бы точкой точного останова была
Р3, то задержка точки переключения была бы возможной максимум
до Р3.
Если для пространственного или временного смещения задаются более
высокие значения, система управления автоматически переключается
на границе переключения.
9.6.16
Установка импульсов на траектории — SYN PULSE
Условие
Порядок
действий
260 / 277
Программа выбрана.
Выбран режим работы T1.
1. Установить курсор в строку, после которой должна быть вставлена
логическая команда.
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
9 Программирование для группы "Пользов...
2. Выбрать последовательность меню Команды > Логика > OUT > SYN
PULSE.
3. Во встроенном формуляре установить параметры.
(>>> 9.6.17 "Встроенный формуляр SYN PULSE" Страница 261)
4. Сохранить команду, нажав кнопку Команда OK.
9.6.17
Встроенный формуляр SYN PULSE
Посредством SYN PULSE можно инициировать импульс в начальной или
конечной точке движения. Импульс может быть смещен во времени и/
или в пространстве: Т.е. его не требуется активировать точно в заданной
точке – это может быть выполнено раньше или позже.
Рис. 9-47: Встроенный формуляр SYN PULSE
Поз.
Описание
1
Номер выхода
2
Если у выхода есть имя, это имя отображается.
Только для группы пользователей «Эксперты»:
нажатием на кнопку Описание можно ввести имя. Имя задается свободно.
3
4
Состояние, в которое переключается выход
TRUE
FALSE
Продолжительность импульса
5
0,1 … 3 с
Точка, к которой относится SYN PULSE:
START: начальная точка движения
END: целевая точка движения
Примеры и границы переключения см. SYN OUT.
(>>> 9.6.14 "Встроенный формуляр SYN OUT, опция START/
END" Страница 256)
PATH: SYN PULSE относится к целевой точке. Дополнительно возможно пространственное смещение.
Примеры и границы переключения см. SYN OUT.
(>>> 9.6.15 "Встроенный формуляр SYN OUT, опция PATH"
Страница 258)
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
261 / 277
KUKA System Software 8.3
Поз.
6
Описание
Удаление точки переключения от целевой точки
-2 000 … +2 000 мм
Это поле отображается на дисплее, если выбран пункт PATH.
7
Временное смещение операции переключения.
-1 000 … +1 000 мс
Указание. заданное время является абсолютным. Точка переключения изменяется в зависимости от скорости робота.
9.6.18
Изменение логической команды
Условие
Порядок
действий
Программа выбрана.
Выбран режим работы T1.
1. Установить курсор в строку с командой, которая должна быть изменена.
2. Нажать кнопку Изменить. Открывается встроенный формуляр команды.
3. Изменить параметры.
4. Сохранить изменения, нажав кнопку Команда OK.
262 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
10 Сервис KUKA
10
Сервис KUKA
10.1
Запрос службы поддержки
Введение
В настоящем руководстве содержится информация об эксплуатации и
управлении, а также об устранении неисправностей. При возникновении
каких-либо других вопросов можно связаться с местным филиалом нашего предприятия.
Информация
Для оформления запроса необходимо указать следующую информацию:
A
описание проблемы, включая данные о продолжительности и периодичности возникновения неисправности.
По возможности более всеобъемлющей информации по компонентами программного и аппаратного обеспечения всей системы
Следующий перечень содержит критерии того, какая информация зачастую является наиболее важной:
Тип и серийный номер кинематики, например, манипулятора
Тип и серийный номер системы управления
Тип и серийный номер системы энергоснабжения
Описание и версия системного программного обеспечения
Обозначения и версии дополнительных/прочих компонентов программного обеспечения или модификаций
комплект диагностики KrcDiag;
дополнительно для KUKA Sunrise: существующие проекты, включая приложения;
для версий системного программного обеспечения KUKA до V8:
архив программного обеспечения (KrcDiag еще не доступен);
10.2
имеющаяся прикладная программа;
имеющиеся дополнительные оси;
Сервисная служба KUKA
Доступный
сервис
Отделы сервисной службы KUKA имеются во многих странах. При возникновении вопросов просьба обращаться к нам!
Аргентина
Ruben Costantini S.A. (представительство)
Luis Angel Huergo 13 20
Parque Industrial
2400 San Francisco (CBA)
Аргентина
Тел. +54 3564 421033
Факс +54 3564 428877
ventas@costantini-sa.com
Австралия
KUKA Robotics Australia Pty Ltd
45 Fennell Street
Port Melbourne VIC 3207
Австралия
Тел. +61 3 9939 9656
info@kuka-robotics.com.au
www.kuka-robotics.com.au
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
263 / 277
KUKA System Software 8.3
264 / 277
Бельгия
KUKA Automatisering + Robots N.V.
Centrum Zuid 1031
3530 Houthalen
Бельгия
Тел. +32 11 516160
Факс +32 11 526794
info@kuka.be
www.kuka.be
Бразилия
KUKA Roboter do Brasil Ltda.
Travessa Claudio Armando, nº 171
Bloco 5 - Galpões 51/52
Bairro Assunção
CEP 09861-7630 São Bernardo do Campo - SP
Бразилия
Тел. +55 11 4942-8299
Факс +55 11 2201-7883
info@kuka-roboter.com.br
www.kuka-roboter.com.br
Чили
Robotec S.A. (представительство)
Santiago de Chile
Чили
Тел. +56 2 331-5951
Факс +56 2 331-5952
robotec@robotec.cl
www.robotec.cl
Китай
KUKA Robotics China Co., Ltd.
No. 889 Kungang Road
Xiaokunshan Town
Songjiang District
201614 Shanghai
P. R. China
Тел. +86 21 5707 2688
Факс +86 21 5707 2603
info@kuka-robotics.cn
www.kuka-robotics.com
Германия
KUKA Roboter GmbH
Zugspitzstr. 140
86165 Augsburg
Германия
Тел. +49 821 797-4000
Факс +49 821 797-1616
info@kuka-roboter.de
www.kuka-roboter.de
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
10 Сервис KUKA
Франция
KUKA Automatisme + Robotique SAS
Techvallée
6, Avenue du Parc
91140 Villebon S/Yvette
Франция
Тел. +33 1 6931660-0
Факс +33 1 6931660-1
commercial@kuka.fr
www.kuka.fr
Индия
KUKA Robotics India Pvt. Ltd.
Office Number-7, German Centre,
Level 12, Building No. - 9B
DLF Cyber City Phase III
122 002 Gurgaon
Haryana
Индия
Тел. +91 124 4635774
Факс +91 124 4635773
info@kuka.in
www.kuka.in
Италия
KUKA Roboter Italia S.p.A.
Via Pavia 9/a - int.6
10098 Rivoli (TO)
Италия
Тел. +39 011 959-5013
Факс +39 011 959-5141
kuka@kuka.it
www.kuka.it
Япония
KUKA Robotics Japan K.K.
YBP Technical Center
134 Godo-cho, Hodogaya-ku
Yokohama, Kanagawa
240 0005
Япония
Тел. +81 45 744 7691
Факс +81 45 744 7696
info@kuka.co.jp
Канада
KUKA Robotics Canada Ltd.
6710 Maritz Drive - Unit 4
Mississauga
L5W 0A1
Ontario
Канада
Тел. +1 905 670-8600
Факс +1 905 670-8604
info@kukarobotics.com
www.kuka-robotics.com/canada
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
265 / 277
KUKA System Software 8.3
266 / 277
Корея
KUKA Robotics Korea Co. Ltd.
RIT Center 306, Gyeonggi Technopark
1271-11 Sa 3-dong, Sangnok-gu
Ansan City, Gyeonggi Do
426-901
Корея
Тел. +82 31 501-1451
Факс +82 31 501-1461
info@kukakorea.com
Малайзия
KUKA Robot Automation (M) Sdn Bhd
South East Asia Regional Office
No. 7, Jalan TPP 6/6
Taman Perindustrian Puchong
47100 Puchong
Selangor
Малайзия
Тел. +60 (03) 8063-1792
Факс +60 (03) 8060-7386
info@kuka.com.my
Мексика
KUKA de México S. de R.L. de C.V.
Progreso #8
Col. Centro Industrial Puente de Vigas
Tlalnepantla de Baz
54020 Estado de México
Мексика
Тел. +52 55 5203-8407
Факс +52 55 5203-8148
info@kuka.com.mx
www.kuka-robotics.com/mexico
Норвегия
KUKA Sveiseanlegg + Roboter
Sentrumsvegen 5
2867 Hov
Норвегия
Тел. +47 61 18 91 30
Факс +47 61 18 62 00
info@kuka.no
Австрия
KUKA Roboter CEE GmbH
Gruberstraße 2-4
4020 Linz
Австрия
Тел. +43 7 32 78 47 52
Факс +43 7 32 79 38 80
office@kuka-roboter.at
www.kuka.at
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
10 Сервис KUKA
Польша
KUKA Roboter Austria GmbH
Spółka z ograniczoną odpowiedzialnością
Oddział w Polsce
Ul. Porcelanowa 10
40-246 Katowice
Польша
Тел. +48 327 30 32 13 or -14
Факс +48 327 30 32 26
ServicePL@kuka-roboter.de
Португалия
KUKA Sistemas de Automatización S.A.
Rua do Alto da Guerra n° 50
Armazém 04
2910 011 Setúbal
Португалия
Тел. +351 265 729780
Факс +351 265 729782
kuka@mail.telepac.pt
Россия
KUKA Robotics RUS
Werbnaja ul. 8A
107143 Moskau
Россия
Тел. +7 495 781-31-20
Факс +7 495 781-31-19
info@kuka-robotics.ru
www.kuka-robotics.ru
Швеция
KUKA Svetsanläggningar + Robotar AB
A. Odhners gata 15
421 30 Västra Frölunda
Швеция
Тел. +46 31 7266-200
Факс +46 31 7266-201
info@kuka.se
Швейцария
KUKA Roboter Schweiz AG
Industriestr. 9
5432 Neuenhof
Швейцария
Тел. +41 44 74490-90
Факс +41 44 74490-91
info@kuka-roboter.ch
www.kuka-roboter.ch
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
267 / 277
KUKA System Software 8.3
268 / 277
Испания
KUKA Robots IBÉRICA, S.A.
Pol. Industrial
Torrent de la Pastera
Carrer del Bages s/n
08800 Vilanova i la Geltrú (Barcelona)
Испания
Тел. +34 93 8142-353
Факс +34 93 8142-950
Comercial@kuka-e.com
www.kuka-e.com
ЮАР
Jendamark Automation LTD (представительство)
76a York Road
North End
6000 Port Elizabeth
ЮАР
Тел. +27 41 391 4700
Факс +27 41 373 3869
www.jendamark.co.za
Тайвань
KUKA Robot Automation Taiwan Co., Ltd.
No. 249 Pujong Road
Jungli City, Taoyuan County 320
Taiwan, R. O. C.
Тел. +886 3 4331988
Факс +886 3 4331948
info@kuka.com.tw
www.kuka.com.tw
Таиланд
KUKA Robot Automation (M)SdnBhd
Thailand Office
c/o Maccall System Co. Ltd.
49/9-10 Soi Kingkaew 30 Kingkaew Road
Tt. Rachatheva, A. Bangpli
Samutprakarn
10540 Thailand
Тел. +66 2 7502737
Факс +66 2 6612355
atika@ji-net.com
www.kuka-roboter.de
Чехия
KUKA Roboter Austria GmbH
Organisation Tschechien und Slowakei
Sezemická 2757/2
193 00 Praha
Horní Počernice
Чешская Республика
Тел. +420 22 62 12 27 2
Факс +420 22 62 12 27 0
support@kuka.cz
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
10 Сервис KUKA
Венгрия
KUKA Robotics Hungaria Kft.
Fö út 140
2335 Taksony
Венгрия
Тел. +36 24 501609
Факс +36 24 477031
info@kuka-robotics.hu
США
KUKA Robotics Corporation
51870 Shelby Parkway
Shelby Township
48315-1787
Michigan
США
Тел. +1 866 873-5852
Факс +1 866 329-5852
info@kukarobotics.com
www.kukarobotics.com
Великобритания
KUKA Automation + Robotics
Hereward Rise
Halesowen
B62 8AN
Великобритания
Тел. +44 121 585-0800
Факс +44 121 585-0900
sales@kuka.co.uk
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
269 / 277
KUKA System Software 8.3
270 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
Индекс
Индекс
Символы
#BSTEP 180
#ISTEP 180
#MSTEP 179
$ANIN 250
$ANOUT 250
$IN 250
$OUT 250
$ROBRUNTIME 91, 92
Цифры
2004/108/ЕС 43
2006/42/ЕС 43
89/336/ЕЭС 43
95/16/ЕС 43
97/23/ЕС 44
А
АВАРИЙНЫЙ ОСТАНОВ 46
АВАРИЙНЫЙ ОСТАНОВ, внешний 27
Аварийный останов, внешний 35
Аварийный останов, локальный 35
Автоматический режим работы 40
Администратор 66
Актуальная позиция 83
Архивирование данных, в сети 172
Архивирование данных, на накопитель USB
172
Архивирование, журнал 173
Архивирование, обзор 170
Ассистент ввода в эксплуатацию 95
Б
База инструмента, калибровка 146
База инструмента, цифровой ввод 148
База, выбор 75
База, калибровка 131
Безопасная зона 19, 22
Безопасность 17
Безопасность, общая информация 17
Безопасный останов STOP 0 19
Безопасный останов STOP 1 20
Безопасный останов STOP 2 20
Безопасный останов 0 19
Безопасный останов 1 20
Безопасный останов 2 20
Безопасный останов, внешний 29
Безопасный рабочий останов 19, 28
Блок CP-Spline 222
Блок PTP-Spline 222
Блок Spline, программирование 221
Блокировка разделительных защитных
приспособлений 26
В
Введение 11
Версия, операционная система 91
Версия, основная система 91
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
Версия, панель управления 91
Версия, система управления роботом 91
Вид выполнения программы, выбор 179
Вид перемещения «Клавиши перемещения»
71
Вид перемещения «Пространственная
мышь» 72
Вид перемещения, активация 74
Виды выполнения программы 179
Виды движений 193
Включение, система управления роботом 55
Внешняя кинематика, калибровка 143
Восстановление, данные 173
Восстановление, данные RDC 178
Восстановление, пакеты опций 178
Восстановление, проекты 178
Время ожидания 253
Время ожидания, отключение подачи
напряжения 60
Время ожидания, Power-fail 59
Время ожидания, Power-off 58
Время работы 91, 92
Вспомогательная точка 194
Вставить 169
Встроенные формуляры 215
Входы/выходы, аналоговые 85, 250
Входы/выходы, внешняя автоматика 85
Входы/выходы, цифровые 83, 250
Выбор записи 185, 200
Выбор режима работы 25
Выбор режимов работы 24
Выбор, программа 161
Вывод из эксплуатации 42
Выключение (пункт меню) 56
Выполнение программы 179
Вырезать 170
Выход, аналоговый 252
Выход, цифровой 250
Г
Главное меню, вызов 55
Группа кинематики 50, 71
Группа пользователей, по умолчанию 65
Группа пользователей, смена 65
Д
Данные дополнительной загрузки (пункт
меню) 152
Данные нагрузки 150
Данные нагрузки инструмента (пункт меню)
151
Данные полезной нагрузки 151
Данные робота (пункт меню) 91
Двигатель, замена 113
Движение РТР 215
Движение CIRC 217
Движение CP 193
Движение LIN 216
271 / 277
KUKA System Software 8.3
Движение SCIRC, программирование 239
Движение SLIN, программирование 237
Движение SPTP, программирование 241
Декларация изготовителя 17, 18
Декларация о соответствии 18
Декларация о соответствии требованиям ЕС
18
Детальный вид (пункт меню) 166
Детальный вид, вывод на дисплей 166
Дефект тормоза 33
Деюстировка 120
Директива о машинах 18
Директива об оборудовании, работающем
под давлением 41
Директива по машиностроению 43
Директива по низковольтному оборудованию
18
Директива по оборудованию, работающему
под давлением 44
Директива по электромагнитной
совместимости 18, 43
Длинные тексты, импорт 153
Длинные тексты, экспорт 153
Документация, промышленный робот 11
Дополнительное оборудование 13, 17
Дополнительные оси 17, 21, 83, 91
Е
Емкость памяти 91
З
Завершение работы, KSS 56
Заводская табличка 47, 95
Закрепление 177
Заменить 170
Запрос службы поддержки 263
Запуск внешней автоматики 186
Запуск, программа 184, 185
Запуск, KSS 55
Защита оператора 24
Защитное оснащение 29
Защитные приспособления, внешние 31
Защитные функции 32
Зона оси 19
И
Изменение, координаты 249
Изменение, логическая команда 262
Изменение, параметры движения 249
Импульс 251
Импульс, относительно траектории 260
Имя, архив 92
Имя, робот 91, 92
Имя, управляющий ПК 91
Индикация, информация о роботах 91
Индикация, информация о системе
управления роботом 91
Инкремент 79
Инкрементальное перемещение вручную 79
Инструмент, внешний 148
Инструмент, выбор 75
272 / 277
Инструмент, стационарный 135
Интегратор установок 21
Интерпретатор заданий 52
Интерпретатор заданий, индикация
состояния 53
Информация (пункт меню) 91
Искать 170
Использование не по назначению 17
Использование по назначению 14, 17
Использование, ненадлежащее 17
К
Калибровка 123
Калибровка, база 131
Калибровка, внешняя кинематика 143
Калибровка, внешняя TCP 135
Калибровка, заготовка 135
Калибровка, инструмент 123
Калибровка, исходная точка кинематики 144
Калибровка, кинематика TOOL 148
Калибровка, линейный блок 141
Калибровка, стационарный инструмент 135
Категория останова 0 20
Категория останова 1 20
Категория останова 2 20
Клавиатура 46, 51
Клавиша клавиатуры 46
Клавиша обратного пуска 46
Клавиша пуска 46, 47
Клавиша СТОП 46
Клавиши перемещения 46, 69, 75
Клавиши состояния 46
Комментарий 168
Компенсатор веса 41
Компенсация, сбой подачи напряжения 58, 59
Контактная измерительная головка 100
Контроль ориентации, LIN, CIRC 196
Контроль ориентации, Spline 208
Контроль, скорость 29
Конфигурация системы безопасности,
импорт 93
Конфигурация системы безопасности,
экспорт 93
Копировать 169
Коррекция 74, 183
Коррекция программы 183
Косвенный метод 134
Л
Линейка состояний 50, 51
Линейный блок 17, 140
М
Манипулятор 13, 17, 19
Маркировка CE 18
Маркировки 31
Машинные данные 91
Менеджер соединений 46
Метки юстировки 101
Метод 3 точек 132
Метод базы отсчета XYZ 127
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
Индекс
Метод ABC 2 точки 129
Метод ABC унив. 128
Метод XYZ 4 точки 125
Механические концевые упоры 30
Механическое устройство ограничения зоны
оси 30
Микроэлектронное наладочное устройство
100, 114
Моделирование 39
Модуль 63
Н
Навигатор 160
Накопители USB 14
Напряжение 85, 252, 253
Неисправности 34
Новая папка, создание 159
Новая программа, создание 159
О
Обеспечение безопасности машин 44
Обзор промышленного робота 13
Область неизменного движения 235, 246
Обработка (кнопка) 50
Обучение 11
Общие меры безопасности 33
Ожидание 59
Окно сообщений 50
Онлайн-справка 61
Онлайновая документация 61
Опасная зона 19
Опасные вещества 41
Оператор 65
Операция переключения, относительно
траектории 255
Описание продукта 13
Опции безопасности 20
Останов, программа 185, 186
Остановочный путь 19, 22
Отключение подачи напряжения, время
ожидания 60
Открытие, программа 161
Отмена выбора, программа 162
Отметка в виде штриха. для юстировки 115
П
Пакеты опций, восстановление 178
Пакеты опций, резервное копирование 177
Папка, создание новой 159
Первичная юстировка 105, 115
Первый ввод в эксплуатацию 34, 95
Перегрузка 33
Переименование, база 140
Переименование, инструмент 140
Переименование, папка 159
Переименование, файл 159
Переключатели подтверждения 28
Переключатель подтверждения 47
Перемещение назад 187
Перемещение, вручную, дополнительные оси
80
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
Перемещение, вручную, робот 69
Перемещение, декартово 69, 75, 78
Перемещение, осевое 69, 75
Перенос строки (пункт меню) 167
Переносное программирующее устройство
13
Периферийный контактор 38, 96
Персонал 21
Поворотный откидной стол 17, 143
Повторное программирование 249
Повторный ввод в эксплуатацию 34, 95
Позиционер 143
Позиция HOME 165
Пользователь 19, 21
Пользователь системы 22
Пользовательский интерфейс 49
Потребление энергии, измерение 81
Пошаговый режим 29, 32
Предварительное число 180
Предохранительные устройства 24
Предохранительные устройства, обзор 24
Предъюстировочное положение 101, 102
Приводы, включение/выключение 54
Применяемые стандарты и предписания 43
Принадлежности 13, 17
Проверка функционирования 35
Программа, автоматический запуск 185
Программа, выбор 161
Программа, закрытие 163
Программа, запуск вручную 184
Программа, останов 185, 186
Программа, открытие 161
Программа, отмена выбора 162
Программа, распечатка 170
Программа, редактирование 167
Программа, сброс 186
Программа, создание новой 159
Программирование 249
Программирование движений, основы 193
Программирование, встроенные формуляры
215
Программирование, пользователь 215
Программируемые концевые выключатели
29, 32
Программируемые концевые выключатели,
изменение 121
Программист 66
Программное обеспечение 13, 17
Программные концевые выключатели 121
Программные строки, удаление 169
Проект, неактивный 176
Проекты, восстановление 178
Проекты, резервное копирование 177
Промышленный робот 13, 17
Пространственная мышь 46, 69, 76, 77, 78
Пульт управления KUKA smartPAD 19
Пульт управления smartPAD 20
Путь реакции 19
Р
Работы по очистке 41
273 / 277
KUKA System Software 8.3
Работы по уходу 41
Рабочая зона 19, 22
Разъем USB 47
Распечатка, программа 170
Распознавание столкновения 219
Реакции останова 23
Редактор 161
Режим ввода в эксплуатацию 37
Режим интерполяции 219, 224
Режим работы, смена 66
Резервное копирование, данные RDC 177
Резервное копирование, пакеты опций 177
Резервное копирование, проекты 177
Ремонт 40
Робот с точным позиционированием,
проверка активации 97
Робот-палетоукладчик 131
Роботы-палетоукладчики 125
РТР, вид движения 193
Ручная коррекция 74
Ручной программатор 17
Ручной режим 38
Рывок 225, 226, 230, 232, 238, 241
С
Сбой подачи напряжения, компенсация 58, 59
Сглаживание 195, 220
Сегмент SCIRC, программирование 226
Сегмент SLIN, программирование 226
Сегмент SPL, программирование 226
Сегмент Spline 197
Сегмент SPTP, программирование 228
Сенсорный экран 45, 51
Сервис, робот KUKA 263
Сервисная служба KUKA 91, 263
Серийный номер 92
Сингулярность 212
Сингулярность, CP-Spline 209
Система защиты оператора 26, 32, 54
Система координат BASE 67, 132
Система координат FLANGE 68, 124
Система координат ROBROOT 67
Система координат TOOL 67, 123
Система координат WORLD 67
Система управления безопасностью 25
Система управления роботом 13, 17
Системные требования 14
Системный интегратор 18, 21
Системы координат 67
Системы координат, для клавиш
перемещения 50
Системы координат, для пространственной
мыши 50
Системы координат, ориентация 69
Системы координат, угол 69
Скорость 74, 183
Скорость, контроль 29
Смещение 105, 108, 114, 118, 252
Соединительные кабели 13, 17
Сообщения, вызов справки 62
Специальные знаки 215
274 / 277
Список файлов 160
Срок службы 19
Стандартное электронное наладочное
устройство 100
Стандартное электронное наладочное
устройство (Standard Electronic Mastering Device) 105
Стрелочный индикатор 111
Строка заголовка 160
Строка состояния 160
Строка DEF (пункт меню) 166
Строка DEF, выделение/затемнение 166
Структура каталогов 160
Счетчик времени работы 92
Счетчик, индикация 88
Т
Таймер, индикация 89
Термины, безопасность 19
Технические данные 36, 92, 95
Технологические пакеты 13, 215
Техобслуживание 40, 155
Тип, робот 91
Тип, система управления роботом 91
Типы пуска 59
Товарные марки 12
Тормозной путь 19
Точка запястья 213
Точки измерения (пункт меню) 90
Транспортировка 34
Триггер, для встроенного формуляра Spline
232
У
Угол круга 212
Указание об ответственности 17
Указания 11
Указания по технике безопасности 11
Указатель записи 163, 180
Управление 45
Управление проектом (окно) 175
Условия перемещения (окно) 53
Устройство АВАРИЙНОГО ОСТАНОВА 26,
27, 32
Устройство контроля зоны оси 30
Устройство ограничения зоны оси 30
Устройство подтверждения 28, 32
Устройство подтверждения, внешнее 28
Устройство позиционирования 17
Устройство размыкания тормозов 31
Устройство свободного вращения 31
Утилизация 42
Утрата юстировки 105, 109, 114, 119
Ф
Фильтр 161
Флаги, индикация 87
Функциональные пакеты 91
Функция ожидания, зависимая от сигнала 254
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
Индекс
Х
Холодный пуск 59
Холодный пуск, первичный 58, 59
Хранение 42
Ц
Целевая группа 11
Цифровой ввод, база 135
Цифровой ввод, внешний инструмент 150
Цифровой ввод, внешний TCP 137
Цифровой ввод, инструмент 131
Цифровой ввод, исходная точка кинематики
146
Цифровой ввод, линейный блок 143
Ш
Шина привода 59
Штамп 168
Шунтирование (пункт меню) 81
Шунтирование контроля рабочей зоны 80
Э
Экспорт (кнопка) 93
Экстренное положение 28
Электромагнитная совместимость (EMV) 44
Ю
Юстировка 98
Юстировка по исходным данным 113
Юстировка по исходным данным после
профилактических мероприятий 113
Юстировка, методы 99
Юстировка, удаление 120
Юстировочное положение, A6 114
OUT 250
Performance Level 24
Point to Point 193
POV 183
Power-fail, время ожидания 59
Power-off, время ожидания 58
PROFIenergy 81
PULSE 251
RDC, восстановление данных 178
RDC, замена 113
RDC, резервное копирование данных 177
SEMD 100, 105
Single Point of Control 42
smartHMI 13, 49
smartPAD 33, 45
Spline, вид движения 197
SPOC 42
STOP 0 19, 20
STOP 1 19, 20
STOP 2 19, 20
SYN OUT 255
SYN PULSE 260
T1 21
T2 21
TCP 124
TCP, внешняя 135
Tool Center Point 124
US2 38, 96
WAIT 253
WAITFOR 254
XML-импорт 93
XML-экспорт 93
Я
Язык 60
A6, юстировочное положение 114
ANOUT 252
ANSI/RIA R.15.06-2012 44
CELL.SRC 186
CIRC, вид движения 194
Continuous Path 193
EN 60204-1 + A1 44
EN 61000-6-2 44
EN 61000-6-4 + A1 44
EN 614-1 44
EN ISO 10218-1 44
EN ISO 12100 44
EN ISO 13849-1 44
EN ISO 13849-2 44
EN ISO 13850 44
HOV 74
INTERN.ZIP 172, 173
KrcDiag 174
KUKA smartHMI 49
KUKA smartPAD 45
KUKA.Load 150
KUKA.LoadDataDetermination 151
LIN, вид движения 194
MEMD 100, 114
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
275 / 277
KUKA System Software 8.3
276 / 277
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
KUKA System Software 8.3
Состояние на: 20.01.2015 Версия: KSS 8.3 END V4
277 / 277