1
Построение системы управления
с цифровым регулятором
Задачи работы
•
•
•
•
Построить цифровую систему управления объектом обеспечивающую:
− устойчивость к возмущающим воздействиям;
− минимальное
время
переходного
процесса
при
ограничении
величины управляющего воздействия.
Произвести сравнительный анализ переходных процессов построенной системы с
непрерывной системой управления
Сравните переходные процессы в непрерывной и цифровой системах
Определить максимально допустимый интервал квантования для цифровой системы управления.
Описание системы
− Непрерывная система управления
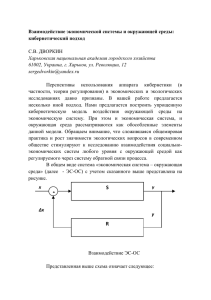
В работе рассматривается система управления судном по курсу. Ее структурная схема показана на рисунке.
ϕ0
регулятор
+
ε
объект
u
C(s)
привод
ϕ
P(s)
–
H(s)
измерительная система
Структурная схема системы стабилизации судна на курсе
Линейная математическая модель, описывающая рыскание судна, имеет вид
ϕ = ω y
y =−
ω
1
K
δ
ωy +
Ts
Ts
где ϕ – угол рыскания (угол отклонения от заданного курса), ω y – угловая скорость
вращения вокруг вертикальной оси, δ – угол поворота вертикального руля относительно
положения равновесия, Ts – постоянная времени, K – постоянный коэффициент, имеющий
размерность рад/сек. Передаточная функция от угла поворота руля к углу рыскания запишется в виде
K
.
P( s) =
s (Ts s + 1)
Линейная модель привода (рулевой машины) представляет собой интегрирующее
звено с передаточной функцией
1
,
R0 ( s ) =
TR s
охваченное единичной отрицательной обратной связью. На угол перекладки руля и скорость перекладки накладываются нелинейные ограничения
2
δ(t ) < 3 / сек ,
δ (t ) < 30 .
Для измерения угла рыскания используется гирокомпас, математическая модель которого записывается в виде апериодического звена первого порядка с передаточной функцией 1
1
,
H (s) =
Toc s + 1
В непрерывной системе в качестве управляющего устройства используется ПИДрегулятор с передаточной функцией 2
Ts 1
C ( s ) = K c 1 + s +
, где Tv = 1 сек и TI = 200 сек.
Tv s + 1 TI s
Для компенсации эффекта насыщения, вызванного ограниченным углом перекладки руля,
используется схема с внутренней нелинейной обратной связью, охватывающей интегратор
в составе регулятора 3.
e
K c [(Ts + 1) s + 1]
Tv s + 1
u
1
TI s
K aw
Базовый регулятор, построенный по линейной модели, выделен серым фоном. Сигнал u на его выходе представляет собой желаемый угол перекладки руля. Для блока нелинейной коррекции типа «насыщение» выбираются пределы, равные ограничениям на
угол перекладки руля.
Если насыщения нет, разность сигналов u − u равна нулю, и обратная связь не работает; используется закон управления, синтезированный для линейной системы. Если сигнал u превышает допустимые пределы, разность u − u подается (со знаком «минус») на
вход интегратора через усилитель. Таким образом, при насыщении сигнал на входе интегратора ослабляется тем сильнее, чем больше разность между желаемым и допустимым
углами перекладки. Такой метод коррекции получил в литературе название anti-windup
(противодействие «наматыванию»).
Для выбора оптимального значение коэффициента K aw применяются процедуры
численной оптимизации пакета NCD Blockset.
− Цифровая система управления
Для цифровой реализации регулятора используется цифровой компьютер с интервалом квантования T . Регулятор в расчетной схеме заменяется на последовательное соединение трех звеньев:
1
Численные значения
Значение
K , Ts , TR и Toc надо взять из таблицы в конце файла.
K c определить самостоятельно.
3
Значение K aw определить самостоятельно.
2
3
1) импульсного элемента, который выбирает из непрерывного сигнала e(t ) значения
ek = e(kT ) в моменты квантования t k = kT (при целых k ); импульсный элемент моделирует аналого-цифровой преобразователь (АЦП);
2) линейного цифрового фильтра, который преобразует дискретную последовательность ek в управляющую последовательность vk ; передаточная функция этого фильтра определяет закон управления;
3) восстанавливающее устройство (экстраполятор), которое восстанавливает непрерывный сигнал управления u (t ) из последовательности vk ; экстраполятор моделирует
цифро-аналоговый преобразователь (ЦАП), чаще всего используется фиксатор нулевого порядка, который удерживает постоянное значение u (t ) в течение очередного
интервала квантования:
u (kT + ε ) = vk , 0 ≤ ε < T .
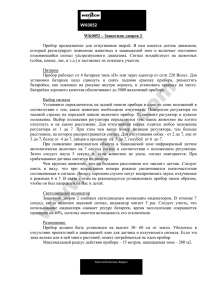
Схема цифрового регулятора показана на рисунке:
ИЭ
e
ek
K c [a1 z + a0 ]
b1 z + b0
vk
vk
u
Э
T
TI ( z − 1)
K aw
Блок ИЭ обозначает импульсный элемент (АЦП), блок Э – экстраполятор (ЦАП). Точечные линии обозначают дискретные сигналы, сплошные линии – непрерывные.
Цифровые регуляторы обладают многими преимуществами в сравнении с классическими (непрерывными):
• отсутствует дрейф параметров элементов
• в цифровой форме можно реализовать сложные законы управления
• цифровые регуляторы легко перестраивать, настройка сводится к просто к замене
алгоритма обработки измеряемых сигналов
В то же время между моментами квантования (моментами съема измеряемых сигналов и
выдачи нового управляющего воздействия) система ведет себя как разомкнутая (неуправляемая). Это может привести к потере устойчивости (при больших интервалах квантования в сравнении с постоянной времени объекта) и скрытым колебаниям (колебаниям непрерывного сигнала, которые не проявляются в моменты квантования).
Для построения дискретной модели ПД-регулятора используется преобразование
Тастина:
2 z −1
,
s←
T z +1
соответствующее интегрированию по методу трапеций. Для рассматриваемого ПДрегулятора такая замена дает
K [a z + a0 ]
,
D pd ( z ) = c 1
b1 z + b0
где коэффициенты равны
a1 = T + 2(Ts + Tv ) , a0 = T − 2(Ts + Tv ) , b1 = T + 2Tv , b0 = T − 2Tv .
4
Для построения дискретной передаточной функции интегрального канала применяется метод интегрирования Эйлера (метод прямоугольников), т.е., замена
z −1
.
s←
T
В ходе выполнения работы требуется построить цифровые реализации регулятора
при различных интервалах квантования и сравнить переходные процессы в непрерывной и
цифровой системе управления.
Таблица коэффициентов
Вариант
Ts , сек
K , рад/сек
TR , сек
Toc , сек
1.
16.0
0.06
1
1
2.
16.2
0.07
2
2
3.
16.4
0.08
1
3
4.
16.6
0.07
2
4
5.
16.8
0.06
1
5
6.
17.0
0.07
2
6
7.
17.2
0.08
1
1
8.
17.4
0.07
2
2
9.
17.6
0.06
1
3
10.
17.8
0.07
2
4
11.
18.0
0.08
1
5
12.
18.2
0.09
2
6
13.
18.4
0.10
1
1
14.
18.6
0.09
2
2
15.
18.8
0.08
1
3
16.
19.0
0.07
2
4
17.
19.2
0.08
1
5
18.
19.4
0.09
2
6
19.
19.6
0.10
1
1
20.
18.2
0.0694
2
6
5
Теоретические сведения
Эффект насыщения
В реальных системах всегда есть ограничения на максимальную величину управляющего воздействия. В судовых системах управления это, например, предельная скорость
электромотора привода, предельное значение угла перекладки руля, предельная скорость
перекладки. На малых углах поворота влиянием таких нелинейных ограничений можно
пренебречь, однако при больших величинах сигналов они существенно изменяют свойства системы.
Нелинейности такого типа называются «насыщением»:
u
u
Они описываются уравнением
umin , при u < umin
=
u u , при umin ≤ u ≤ umax ,
u , при u > u
max
max
где u – сигнал на входе звена, u – сигнал на выходе (с учетом насыщения), u min и u max –
допустимые пределы.
Для компенсации постоянных возмущений в регулятор часто вводится интегрирующее звено. При этом в системах с насыщением наблюдается эффект «залипания» интегратора. Он заключается в том, что управляющий сигнал уже достиг предельного значения, а
интегратор продолжает интегрировать («наматывать», windup) ошибку, хотя увеличивать
управление уже нельзя. Когда ошибка изменит знак, потребуется переложить руль в другую сторону, но этого не произойдет, поскольку выход интегратора очень велик. В результате увеличивается перерегулирование и время переходного процесса. На практике
такое поведение системы может оказаться недопустимым.
Компенсация эффекта насыщения (anti-windup)
Для того, чтобы предотвратить «наматывание» интегратора, используются специальные приемы нелинейной коррекции. Они сводятся к одному из двух вариантов:
1. Условное интегрирование: если сигнал управления достигает предельного значения,
интегратор отключается и интегрирование останавливается
2. Техника anti-windup: из входа интегратора вычитается сигнал, который поступает с
блока компенсации насыщения. Именно этот вариант мы будем исследовать.
Пусть интегратор включается параллельно остальной части регулятора, т.е., имеет вид
1
,
C ( s) = C0 ( s) +
TI s
где C0 ( s ) – часть регулятора, не содержащая интегрирующих звеньев, а TI – постоянная
времени интегрирующего звена.
6
Регулятор
e
u
u
C0 ( s)
1
TI s
z
K aw
Блок компенсации насыщения
Блок компенсации насыщения генерирует сигнал
z = u −u ,
где u – сигнал на выходе регулятора, а u – сигнал с учетом насыщения:
umin , при u < umin
=
u u , при umin ≤ u ≤ umax ,
u , при u > u
max
max
причем пределы u min и u max выбираются такие же, как и допустимые пределы для выходного сигнала привода. Если сигнал u находится в допустимых пределах (в интервале
[u min , u max ] ), то z = 0 и система работает в линейном режиме, без насыщения. Если же сигнал u выходит из диапазона [u min , u max ] , сигнал z , не равный нулю, подается через усилитель на вход интегратора с обратным знаком, противодействуя «накручиванию» интегратора и возрастанию его выходного сигнала.
Заметим, что вместо усилителя с коэффициентом K aw можно устанавливать динамическое звено, однако простейшего варианта часто бывает достаточно.
Аналогичная идея может быть использована и в том случае, когда интегратор подключается последовательно, т.е.,
1
C ( s) = C0 ( s) ,
s
где C0 ( s ) – часть регулятора, не содержащая интегрирующих звеньев. Соответствующая
блок-схема системы показана на рисунке.
Регулятор
e
C0 ( s)
1
s
u
u
z
K aw
Блок компенсации насыщения
Для того, чтобы выбрать коэффициент K aw , можно использовать различные методы теории нелинейных систем или математическое моделирование. С инженерной точки зрения
проще второй способ, который позволяет в интерактивном режиме методом проб и оши-
7
бок выбрать подходящее значение K aw . В среде MATLAB поиск можно автоматизировать с
помощью пакета NCD Blockset (Nonlinear Control Design).
Пакет Design Optimization
Пакет Simulink Design Optimization предназначен для настройки параметров нелинейной модели методом численной оптимизации по переходному процессу.
С помощью ломаных линий задается область, из которой не должен выходить переходный процесс. Интервал, на котором выполняется моделирование, разбивается на небольшие участки шириной h . Для этих точек строится система неравенств, которым
должна удовлетворять функция, описывающая переходный процесс. На рисунке отрезками красного цвета показано, где эти неравенства нарушены. Требуется выбрать параметры
модели так, чтобы нарушений было как можно меньше и величины отклонений были минимальны. В идеале весь переходный процесс вписывается в допустимую область, нарушений вообще нет.
Для решения этой задачи в пакете Simulink Design Optimization используются процедуры нелинейной оптимизации с ограничениями из пакета Optimization Toolbox.
h
t
Сначала надо перетащить в модель SIMULINK блок Check Step Response Characteristic из группы Signal Constraint и подать на его вход сигнал, который надо «вписать» в заданную область. По умолчанию границы области устанавливаются так, чтобы установившееся значение сигнала было равно единице. Если это не так, на входе блока Check Step
Response Characteristic можно поставить дополнительный усилитель (блок Gain), который изменит масштаб. Например, если установившееся значение равно 10, коэффициент
усиления надо сделать равным 0.1, чтобы установившееся значение на входе блока Check
Step Response Characteristic было равно 1.
Двойной щелчок по блоку NCD Outport открывает рабочее окно для подбора параметра.
8
Перетаскивая красные полоски вверх и вниз, можно менять границы допустимой области
(она залита черным цветом). Можно также перетаскивать влево и вправо вертикальные
границы. Щелчок ПКМ по красной полосе позволяет задать параметры ограничения более
точно в диалоговом окне.
Для того, чтобы разбить полоску на две (сделать более точную границу) надо выделить ее щелчком мыши и щелкнуть по кнопке Split.
Чтобы задать параметры поиска, надо выбрать в этом окне пункт верхнего меню Optimization – Optimization Parameters:
В поле Tunable variables вводятся через пробел имена переменных, значения которых
требуется подобрать. Поля Lower bounds (нижние границы значений переменных) и Upper bounds (верхние границы) необязательны для заполнения.
В поле Discretization interval надо ввести величину шага h (см. рисунок выше). От
шага зависит количество интервалов и количество ограничений. Чем меньше шаг, тем
больше задается ограничений и медленнее работает процедура поиска. С другой стороны,
при очень большом шаге снижается точность. Рекомендуется выбирать этот параметр
равным 1-2% от общего времени моделирования.
Перед запуском процедуры оптимизации надо ввести первое приближение для неизвестных параметров в командном окне MATLAB:
Kaw = 0.2;
9
После этого следует щелкнуть по кнопке Start в окне блока Check Step Response Characteristic. Информацию о ходе процесса и сообщения об ошибках можно наблюдать в командном окне MATLAB. Обычно для того, чтобы добиться качественных переходных процессов, приходится несколько раз запускать процедуру оптимизации, меняя ограничения
и последовательно улучшая результат.
Задача переоборудования
Классические методы синтеза позволяют построить непрерывный регулятор, который описывается передаточной функцией или соответствующим дифференциальным
уравнением. Для непосредственной реализации такого регулятора можно использовать
различные аналоговые элементы, в том числе и электронные (RC-цепочки, операционные
усилители и т.п.).
В то же время в современных системах управления законы регулирования чаще всего реализуются с помощью бортового цифрового компьютера или микроконтроллера. При
этом
•
отсутствует дрейф параметров элементов регулятора (их изменение со временем,
при изменении давления, температуры и т.п.);
•
компьютер позволяет реализовывать достаточно сложные алгоритмы управления, в
том числе и адаптивные, что крайне трудно сделать на базе аналоговой техники;
•
для перестройки алгоритма управления не требуется менять аппаратуру, а надо просто заменить программу обработки данных.
Цифровые вычислительные устройства представляют собой элементы дискретного
действия. Они периодически выполняют измерения входного сигнала и расчет нового
управляющего воздействия. Период, через который эти операции повторяются, называется интервалом квантования и обозначается через T .
На цифровых компьютерах нельзя напрямую реализовать управляющее устройство,
которое описывается дифференциальным уравнением в непрерывном времени. Задача
переоборудования состоит в том, чтобы заменить спроектированный непрерывный регулятор цифровым устройством так, чтобы сохранить все существенные свойства непрерывной системы (устойчивость, качество, подавление постоянных возмущений).
Компьютер в контуре управления
Компьютер в контуре управления можно представить в виде последовательное соединение трех звеньев:
4) импульсного элемента, который выбирает из непрерывного сигнала ошибки e(t )
значения ek = e(kT ) в моменты квантования t k = kT (при целых k ); импульсный элемент моделирует аналого-цифровой преобразователь (АЦП);
5) линейного цифрового фильтра, который преобразует дискретную последовательность ek в управляющую последовательность vk ; свойства этого фильтра определяют
закон управления;
6) восстанавливающее устройство (экстраполятор), которое восстанавливает непрерывный сигнал управления u (t ) из последовательности vk ; экстраполятор моделирует
цифро-аналоговый преобразователь (ЦАП), чаще всего используется фиксатор нулевого порядка, который удерживает постоянное значение u (t ) в течение очередного
интервала квантования:
u (kT + ε ) = vk , 0 ≤ ε < T .
10
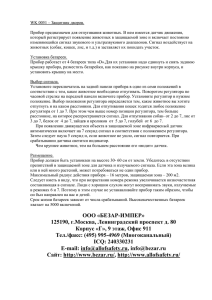
Схема цифрового регулятора показана на рисунке:
ИЭ
ek
e
ЦФ
vk
u
Э
Блок ИЭ обозначает импульсный элемент (АЦП), блок ЦФ – цифровой фильтр, блок Э –
экстраполятор (ЦАП). Точечные линии обозначают дискретные сигналы, сплошные линии
– непрерывные сигналы.
Экстраполятор
Экстраполятором называют устройство, которое восстанавливает непрерывный сигнал управления u (t ) по дискретной последовательности значений { ν k } , поступающих с
выхода цифрового фильтра в моменты времени t k = kT . Обычно вычислительное запаздывание (время, необходимое на расчет очередного значения ν k ) включают в модель объекта управления, поэтому считается, что цифровой фильтр выполняет обработку данных
мгновенно.
В простейшем случае ЦАП, получив новый управляющий сигнал ν k от цифрового
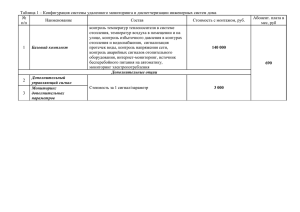
фильтра, просто удерживает (фиксирует) его в течение интервала квантования T (до получения следующего значения ν k +1 ). Такой экстраполятор называется фиксатором нулевого порядка (англ. zero-order hold, ZOH).
νk
u (t )
0
1
2
3
0
T
2T 3T
t
Фиксатор
Фиксатор нулевого порядка
Фиксатор нулевого порядка восстанавливает сигнал по правилу
u (kT + ε ) = vk ,
0≤ε <T .
Здесь ε – так называемое локальное время, прошедшее с момента последнего срабатывания импульсного элемента.
Предположим, что дискретная последовательность получена в результате квантования некоторого непрерывного сигнала. Восстановленный сигнал будет представлять собой «ступеньки», высота которых совпадает с истинным значением сигнала в начале интервала. Если провести линию через середины этих «ступенек», получается сигнал, смещенный относительно исходного на T / 2 . Поэтому говорят, что последовательно примененные операции квантования и восстановления сигнала с помощью фиксатора нулевого
порядка приводят к его запаздыванию на половину периода.
Существуют и более сложные экстраполяторы, учитывающие несколько последних
значений последовательности { ν k } , но они используются на практике крайне редко из-за
проблем в реализации.
11
Цифровые фильтры
Цифровой фильтр – это устройство, преобразующее входную дискретную последовательность
{ ek } = e0 , e1 , e ,
в выходную
{ν k } = ν 0 , ν 1 , ν ,
В реальных фильтрах для расчета очередного значения управляющей последовательности
ν k в момент времени t = kT используется конечное число прошлых значений входного и
выходного сигналов, хранящихся в оперативной памяти:
n k = ℑ(ek , ek −1 , , ek −n , n k −1 , ,n k −n )
Здесь ℑ(⋅) – некоторая функция своих переменных и n – целое число, называемое порядком фильтра. Чаще всего используют линейные законы управления, которые описываются формулой
n k = a0 ek + a1ek −1 + an ek −n − b1n k −1 − bn k − − − bnn k −n ,
где ai (i = 0, n) и bi (i = 1, n) – вещественные числа. Уравнение такого вида называют
линейным разностным уравнением регулятора. Оно аналогично дифференциальному
уравнению непрерывной системы, но входной и выходной сигналы изменяются в дискретном времени, т.е., определены только в моменты времени t k = kT .
Как и для линейных непрерывных систем, для описания линейных цифровых фильтров (линейных дискретных систем) можно использовать операторный метод. В литературе чаще всего используется оператор сдвига вперед z
zek = ek +1 , z m ek = ek + m .
Обозначив через z −1 обратный оператор, получим z −1ek = ek −1 и z − m ek = ek −m . Тогда, перенося в левую часть все члены, зависящие от выходной последовательности, можно записать уравнение регулятора в операторной форме
(1 + b1 z −1 + b2 z −2 + 2 bn z − n )n k = (a0 + a1 z −1 + a2 z −2 + 2 an z − n ) ek .
Отношение
D( z ) =
a0 + a1 z −1 + a z − + an z − n
a0 z n + a1 z n−1 + a z n− + an
=
1 + b1 z −1 + b z − + bn z −n
z n + b1 z n−1 + b z n− + bn
называется дискретной передаточной функцией цифрового фильтра. Таким образом, в
операторной форме получаем ν k = D( z ) ek .
Фактически задача переоборудования сводится к тому, чтобы заменить передаточную функцию C (s ) непрерывного регулятора дискретной передаточной функцией цифрового фильтра D(z ) так, чтобы сохранить все существенные свойства системы.
Методы численного интегрирования
Простейшие методы переоборудования основаны на приближенной замене интегрирующего звена с передаточной функцией 1 / s его дискретной моделью. Это позволяет по-
12
лучить дискретную передаточную функцию цифрового регулятора, сделав соответствующую замену в передаточной функции непрерывного регулятора C (s ) .
x(t )
y (t )
x
y
k
1
s
ℑ
k
а)
б)
Непрерывный и дискретный интеграторы
Пусть x(t ) и y (t ) — входной и выходной сигнал непрерывного интегратора. Если
известно значение yk = y (kT ) , то
kT +T
yk +1 = y (kT + T ) = yk +
∫ x(t ) dt .
kT
Такое звено приближенно заменяется дискретным интегратором, для которого
yk +1 = ℑ( yk , yk −1 , , xk +1 , xk , ) ,
где ℑ(⋅) — некоторое правило построения следующего значения выхода по предыдущим
значениям входа и выхода. Для решения этой задачи можно использовать любой метод
численного интегрирования. Мы рассмотрим методы прямоугольников и трапеций.
x(t )
x(t )
t
t
0
kT kT + T
kT kT + T
а)
б)
Метод Эйлера (а) и метод обратных разностей (б)
0
При использовании метода Эйлера имеем
y k +1 = y k + T xk .
Используя оператор z (сдвиг вперед), получаем
z y k = y k + T xk
⇒
yk
T
.
=
xk z − 1
Таким образом, переоборудование по методу Эйлера сводится к замене
s←
z −1
.
T
Аналогично можно построить правило замены для метода обратных разностей:
s←
z −1
.
zT
Из курса численных методов известно, что методы прямоугольников дают низкую
точность. Более совершенен метод трапеций:
yk +1 = yk +
T
( xk +1 + xk ) .
2
13
x(t )
t
0
kT
Метод трапеций
Формула интегрирования по методу трапеций приводит к замене
s←
2 z −1
,
⋅
T z +1
которая называется преобразованием Тастина (или Тустена).
Для повышения точности аппроксимации можно использовать более сложные методы, например, замены
s←
s←
z2 −1
3
,
⋅ 2
T z + 4z + 1
z4 + z3 − z −1
10
,
⋅ 4
T z + 6z3 + 6z 2 + 6z + 1
соответствующие методам интегрирования Симпсона и Уэддля. Их главный недостаток
состоит в том, что порядок переоборудованного регулятора будет выше, чем порядок непрерывного.
Переоборудование ПИД-регулятора
Рассмотрим непрерывный ПД-регулятор с передаточной функцией
Ts
C pd ( s ) = K c 1 + s .
Tv s + 1
Дискретизация с помощью методов Эйлера, обратных разностей и Тастина дает дискретные регуляторы вида
K [a z + a0 ]
,
D pd ( z ) = c 1
b1 z + b0
где коэффициенты равны
метод Эйлера
a1 = Ts + Tv , a0 = T − (Ts + Tv ) , b1 = Tv , b0 = T − Tv .
метод обратных разностей
a1 = T + (Ts + Tv ) , a0 = −(Ts + Tv ) , b1 = T + Tv , b0 = −Tv .
преобразование Тастина
a1 = T + 2(Ts + Tv ) , a0 = T − 2(Ts + Tv ) , b1 = T + 2Tv , b0 = T − 2Tv .
Все регуляторы имеют тот же самый порядок (равный 1), что и непрерывный регулятор.
Полученные дискретные регуляторы только приближенно заменяют непрерывный, фактически они всегда будут работать несколько хуже, чем C (s ) .
ПД-регулятор будем переоборудовать с помощью преобразования Тастина (интегрирования методом трапеций), которое является наиболее точным из этих методов. В системе MATLAB для этого можно использовать функцию c2d из пакета Control Toolbox:
14
>> Dpd = c2d ( Cpd, T, 'tustin' )
Здесь Cpd – модель (например, передаточная функция) непрерывного ПД-регулятора, T –
интервал квантования.
Теперь рассмотрим интегральный канал:
1
.
C I (s) =
TI s
Используя рассмотренные выше методы переоборудования, получаем
T
метод Эйлера
,
DI ( z ) =
TI ( z − 1)
метод обратных разностей
DI ( z ) =
Tz
,
TI ( z − 1)
преобразование Тастина
DI ( z ) =
T ( z + 1)
.
2TI ( z − 1)
Как будет показано дальше, для переоборудования интегрального канала лучше использовать преобразование Эйлера.
Ниже показана схема цифрового регулятора с компенсацией насыщения:
ИЭ
ϕk
vk
vk
u
ek
e
D pd (z )
Э
DI (z )
ηk
ψk
K aw
Здесь сплошные линии обозначают непрерывные сигналы, а штриховые – дискретные
(числовые последовательности). ИЭ обозначает импульсный элемент (АЦП), а блок Э –
экстраполятор (ЦАП).
Алгебраические циклы
Пусть интегральный канал переоборудован по методу обратных разностей
DI ( z ) =
Tz
,
TI ( z − 1)
что соответствует разностному уравнению
ψ k = ψ k −1 +
T
( ek − η k ) .
TI
Теперь построим выражение для сигналаη k = K aw (ν k − ν k ) . Учтем, что
ν k = ϕk +ψ k
и ν k = sat(ν k ) = sat(ϕ k + ψ k ) ,
где функция sat(⋅) задает нелинейность типа «насыщение»:
(*)
15
u min , n k < u min ,
sat(n k ) = n k , u min ≤ n k ≤ u max ,
u , n > u .
k
max
max
Объединяя эти формулы, получим разностное уравнение для вычисления ψ k :
ψ k = ψ k −1 +
T
[ek − K aw (ϕ k + ψ k − sat(ϕ k + ψ k ) )] .
TI
В этой формуле значение ψ k , которое требуется рассчитать, входит и в правую часть! Это
значит, что для вычисления ψ k требуется не просто подставить в формулу известные значения, а решить нелинейное уравнение относительно ψ k . Такое явление называется алгебраическим циклом, его желательно избегать. Более того, в сложных случаях это
уравнение может не иметь решения вообще. Система MATLAB-SIMULINK выдает предупреждение в случае обнаружения алгебраического цикла (algebraic loop) при моделировании.
Для того, чтобы не было алгебраического цикла, правая часть разностного уравнения
(аналогичного уравнению (*)) не должна зависеть от ψ k . Это будет в том случае, если передаточная функция DI (z ) – строго правильная, т.е., степень ее числителя меньше степени знаменателя. Из всех рассмотренных вариантов переоборудования интегратора этому
условию удовлетворяет метод Эйлера, который мы и будем использовать в работе. При
попытке применить метод обратных разностей или преобразование Тастина возникает алгебраический цикл, потому что степени числителя и знаменателя передаточной функции
DI (z ) равны.