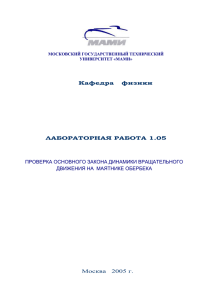
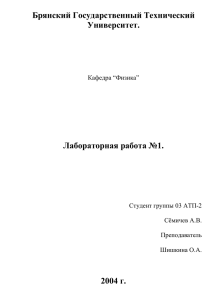
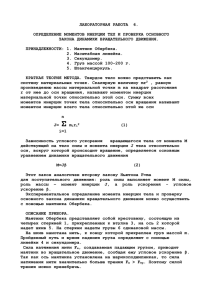
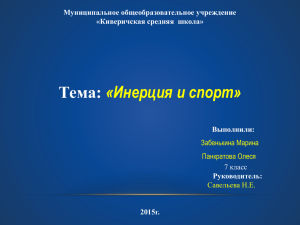
РАБОТА М-3 ИЗУЧЕНИЕ ЗАКОНА ДИНАМИКИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ С ПОМОЩЬЮ МАЯТНИКА ОБЕРБЕКА Цель работы: ознакомиться с основным законом динамики вращательного движения и динамическим методом определения момента инерции тел. Оборудование: маятник Обербека, секундомер, штангенциркуль, линейка, набор грузов. Введение Согласно основному закону динамики вращательного движения для твердого тела (или неизменяемой системы материальных точек) угловое ускорение ε пропорционально моменту силы M относительно неподвижной оси вращения и обратно пропорционально моменту инерции тела J относительно той же оси: M (1) ε= . J Моментом силы называют физическую величину, равную векторному произведению радиус-вектора точки приложения силы и вектора силы: M = [r × F ] . Моментом инерции системы материальных точек относительно данной оси называют величину, равную сумме произведений массы каждой точки тела и квадРис. 1 2 рата расстояния от точки до оси: J = ∑ mi ri . Момент инерции тела определяется как J = ∫ r 2dm . Физический смысл момента инерции тела становится понятным из сравнения основного закона динамики вращательного движения со вторым законом Ньютона: a = F m . Как и масса тела при поступательном движении, так и момент инерции при вращательном движении являются мерой инертности тела. Однако величина момента инерции зависит не только от массы тела, но и от ее распределения: чем дальше от оси расположены части тела, тем больше его момент инерции. Экспериментально момент инерции тела можно определить из основного закона динамики вращательного движения (1), определяя угловое ускорение тела при различных значениях вращательного момента. Графически зависимость углового ускорения от момента силы изображается прямой в координатах ε ( M ) (рис. 2, теор.), угловой коэффициент которой 31 равен 1 J . Но, обычно, существует трудно учитываемый момент сил трения M тр и зависимость ε ( M ) не проходит через начало координат. Однако, если данные измерений M и соответствующего углового ускорения тела могут быть представлены линейной зависимостью (рис. 2, эксп.), то можно сделать вывод о справедливости основного закона динамики вращательного движения. Рис. 2 Описание установки Экспериментально основной закон динамики вращательного движения проверяется на установке (рис. 3), которая представляет собой крестовину, свободно вращающуюся в горизонтальной или вертикальной плоскости, на стержнях которой располагаются подвижные грузы m0. Для уменьшения погрешности измерений на оси маховика смонтированы два шкива (цилиндры, на которые наматывается нить) – малый, радиусом r1 , и большой, радиус которого r2 . На выбранный шкив наматывается нить, к другому концу которой прикреРис. 3 пляется груз m . Груз, опускающийся с начальной высоты h под действием силы тяжести, приводит крестовину во вращение. Описание метода измерений Момент силы, действующий на маятник, создается силой натяжения нити. Величина момента M = Tr . Силу натяжения нити можно найти из уравнения второго закона Ньютона для поступательного движения груза, на который действуют силы тяжести и натяжения нити: ma = mg − T . Ускорение поступательного движения груза a можно определить по формуле кинематики равноускоренного движения 2h a= 2 . (3) t Тогда момент силы натяжения нити относительно оси вращения M = m ( g − a )r ≅ mgr , (4)* так как в нашем случае a ≪ g . Угловое ускорение маятника, приобретенное под действием момента силы, может быть определено через тангенциальное ускорение точек на поверхности шкива, численно равное (при нерастяжимой нити) ускорению груза a : 32 a 2h . (5)* = r r t2 В качестве основных рабочих формул для определения момента инерции маятника Обербека динамическим методом выберем формулы (1), (4) и (5). Начальная высота h , с которой начинает движение груз, отсчитывается по линейке, а время движения груза t измеряется секундомером. Измеряется радиус шкива r , на который наматывалась нить, и по формулам (4) и (5) вычисляется вращающий момент M и угловое ускорение маятника ε . Найденные значения позволяют вычислить момент инерции маятника из основного закона динамики вращательного движения (1), как значение углового коэффициента линейной зависимости ε ( M ) . ε= Выполнение работы Работа состоит из двух заданий. Задание 1. Установление закона вращения маятника. 1. Сбалансировать маятник, для этого установить центры подвижных цилиндров m0 на одинаковом расстоянии от оси вращения. Измерить штангенциркулем радиусы шкивов r1 и r2 . Взвешиванием определить массу грузов m и выбрать начальную высоту h . Результаты записать в табл. 1. 2. Вращая крестовину, намотать нить на один из шкивов и поднять чашку с грузом до выбранной отметки (например, 55 см). Зафиксировать положение крестовины нажатием кнопки электромагнита (справа под крестовиной) и не позднее чем через 10 секунд нажать на кнопку «Пуск» на секундомере, при этом произойдет сброс предыдущего значения. Измерить по секундомеру время падения, оценить погрешность измерения θ t как единицу последнего разряда цифрового табло. Таблица 1 h= … ,м θh = … , м Размер ε i , рад/с2 M i , Н⋅м № m , кг t,c шкива d1 = , мм 1 2 r1 = , мм 3 4 d2 = , мм 5 6 r2 = , мм 7 8 ,с – – θ m = , кг θ t = θd = 33 3. Повторить опыт не менее восьми раз для различных грузов и радиусов r1 и r2 . Для уменьшения погрешности выполняемых измерений необходимо производить намотку нити на шкив в один слой и следить, чтобы грузы и нить во время движения не задевали неподвижные части установки или другие предметы. 4. По экспериментальным значениям для каждого опыта рассчитать значения момента силы M i натяжения нити по формуле (4) и угловые ускорения маятника ε i по формуле (5). Результаты в системе СИ записать в табл. 1. 5. Построить график зависимости ε ( M ) , нанеся точки для обоих шкивов на один график (см. рис. 4). Если отклонение экспериментальных точек от проведенной по ним средней линии невелико, то можно сделать вывод, что основной закон динамики вращательного движения справедлив. Если разброс точек велик, то допущен промах в эксперименте или в расчетах. При необходимости Рис. 4 опыты провести более тщательно. 6. По графику, выбрав две точки, лежащие на прямой, определить момент инерции маятника как обратную величину к угловому коэффициенту линейной зависимости ε ( M ) : M − M1 M − MA tp , δJ = B (6)* ⟨J ⟩ = 2 ⋅ , ε 2 − ε1 ε 2 − ε1 2 N и среднее значение момента сил трения (см. рис. 4) tp (7)* ⟨ M тр ⟩ = M1 − ⟨ J ⟩ ε 1 , δ M тр = ( M B − M A ) ⋅ , 2 N где N – количество экспериментальных точек. Значение коэффициента Стьюдента t p выбирается из табл. 1 раздела «Обработка результатов измерений», в соответствие с задаваемой доверительной вероятностью. Например, для P = 0,95 и N = 8 находим t p = 2,4. 7. Сравнить полученный результат с моментами M i , создаваемыми грузами и сделать вывод. Задание 2. Измерение момента инерции крестовины динамическим методом. 1. Закрепить подвижные цилиндры на минимальном и одинаковом расстоянии l от оси вращения. Выбрать груз массой m и подвесить к нити. Выбрать для эксперимента начальную высоту h , один шкив, записать его радиус r , а также значения m и h , в табл. 2. 34 2. Вращая маятник, намотать нить на шкив в один слой и измерить время движения груза t . Замечание: для фиксации положения груза включать электромагнит на промежуток времени не более 10 с. 3. Провести 5 опытов с тем же грузом m , увеличивая всякий раз на 2 см расстояние l (см. примечание). Результаты измерений t внести в табл. 2. Примечание: Наиболее точные измерения расстояния от оси маятника до центра подвижного груза могут быть проведены с помощью штангенциркуля. Например, производя измерения ∆ 1 , ∆ 2 и ∆ 3 (рис. 5), находим Рис. 5 l = ∆1 − ( ∆ 2 + ∆ 3 ) 2 . 4. Вычислить для каждого опыта величину l 2 и момент инерции маятника по формуле, полученной из выражений (1), (4) и (5): 2 mgr 2 2 M 2 gt J= t . (8)* = mr − 1 ≈ 2 h 2 h ε Результаты записать в табл. 2. Таблица 2 h = … м; m = … кг; r = … м; m0 табл = … кг; диск: mД = … кг, RД = … м; коромысла: mст = … кг, lст = … м; № l,м t,c l 2 , м2 1 2 3 4 5 5. Построить график зависимости J = f ( l 2 ) J , 10–3 кг⋅м2 – момента инерции маятника J от l 2 . Поскольку момент инерции маятника Обербека J = J кр + 4m0 l 2 складывается из момента инерции крестовины и момента инерции четырех подвижных грузов, которые, в данном случае, могут быть приняты за материальные точки, то, Рис. 6 обозначая момент инерции буквой y, а квадрат расстояния – буквой x, получаем линейную зависимость y(x) = kx + b, где свободное слагаемое b равно моменту инерции эксп крестовины J кр , а коэффициент пропорциональности k позволяет определить массу подвижных грузов m0эксп . 35 6. Определить по графику экспериментальные значения момента инерции крестовины J кр и массы подвижных грузов m0 . Для этого на средней линии выбрать две точки (см. рис. 6) и провести следующие вычисления: 1 J − J tp 1 J −J m0эксп = ⋅ 22 21 , δ m0 = ⋅ A2 2B ⋅ (9)* , 4 l2 − l1 2 n 4 l 2 − l1 tp эксп J кр (10)* = J1 − 4m0 l12 , δ J kp = ( J A − J B ) ⋅ . 2 n 7. Сравнить экспериментальное значение массы грузов с массой m0 табл указанной на установке. Сделать вывод о характере зависимости момента инерции материальной точки от расстояния до оси вращения. 8. Для крестовины, состоящей из тел простой геометрической формы, момент инерции можно рассчитать теоретически как сумму моментов инерции диска (цилиндра) массой mД и радиусом RД и закрепленных на нем четырех стержней (называемых коромыслами), каждый из которых имеет длину lст и массу mст : теор 1 m l 2 + m ( R + 1 l )2 . J кр = 12 mД RД2 + 4 ⋅ 12 ст ст ст Д 2 ст (11)* теор Вычислить теоретическое значение момента инерции крестовины J кр и сравнить его с полученным экспериментальным значением. 9. Записать основной результат проделанной работы в виде: m0эксп ± δ m0 = … кг, m0табл = … кг, ∆ m0 | m0табл − m0эксп | = ⋅ 100% = … %, m0табл эксп теор J кр = … кг·м2, ± δ J кр = … кг·м2, J кр ∆ J кр = теор эксп | J кр | − J кр теор J кр 10. Сделать вывод. ⋅ 100% = …%. 36