Лекция 8: многомерная линейная регрессия
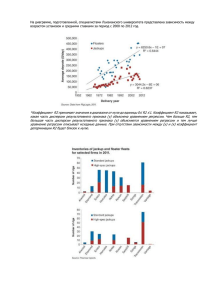
advertisement

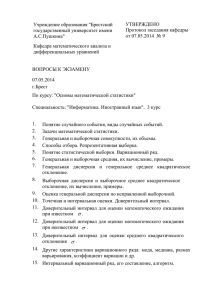
Занятие 8. Многомерная линейная регрессия Краткое содержание 1. Оценка параметров регрессии 2. Теорема Гаусса-Маркова 3. Расчёт доверительных интервалов 4. Линеаризация нелинейной регрессии Постановка задачи Исходные данные Точки в (k+1) – мерном пространстве (𝑦𝑖 , 𝑥𝑖1 , … , 𝑥𝑖𝑘 ) Система уравнений (переопределённая): 𝛽1 𝑥11 + 𝛽2 𝑥12 + ⋯ + 𝛽𝑘 𝑥1𝑘 = 𝑦1 𝛽1 𝑥21 + 𝛽2 𝑥22 + ⋯ + 𝛽𝑘 𝑥2𝑘 = 𝑦2 … 𝛽1 𝑥𝑛1 + 𝛽2 𝑥𝑛2 + ⋯ + 𝛽𝑘 𝑥𝑛𝑘 = 𝑦𝑛 + Аппроксимирующая функция 𝑦 = 𝛽0 + 𝛽1 𝑥𝑖1 + ⋯ + 𝛽𝑘 𝑥𝑖𝑘 𝛽 – параметры модели Система в матричном виде: 𝑿𝜷 = 𝒚 𝑥11 𝑋= ⋮ 𝑥𝑛1 ⋯ 𝑥1𝑘 𝑦1 ⋱ ⋮ ;𝑦 = ⋮ ; ⋯ 𝑥𝑛𝑘 𝑦𝑛 𝛽1 𝛽= ⋮ 𝛽𝑛 Некоторые свойства матриц Умножение и транспонирование След матрицы След матрицы – сумма элементов её главной диагонали 1. 𝐴 + 𝐵 2. 𝐴𝐵 3. 𝐴−1 ⊤ ⊤ ⊤ = = 𝐴⊤ + 𝐵⊤ tr 𝐴 = 𝑖 𝐵⊤ 𝐴⊤ = 𝐴⊤ −1 𝑎𝑖𝑖 1. tr 𝛼𝐴 + 𝛽𝐵 = 𝛼tr 𝐴 + 𝛽tr 𝐵 4. 𝐴𝐵 𝐶 = 𝐴(𝐵𝐶) 2. tr 𝐴𝐵 = tr 𝐵𝐴 5. 𝐴 𝐵 + 𝐶 = 𝐴𝐵 + 𝐴𝐶 3. tr 𝐴⊤ = tr 𝐴 6. 𝐴 + 𝐵 𝐶 = 𝐴𝐶 + 𝐵𝐶 4. tr 𝐴𝐵𝐶 = tr 𝐵𝐶𝐴 = tr(𝐶𝐴𝐵) Метод наименьших квадратов Поиск минимума Сумма квадратов отклонений 𝜕𝑅𝑆𝑆 𝜕(𝑦 ⊤ 𝑋𝛽) 𝜕(𝛽⊤ 𝑋 ⊤ 𝑋𝛽) = −2 + =0 𝜕𝛽 𝜕𝛽 𝜕𝛽 𝜕𝑅𝑆𝑆 = −2𝑋 ⊤ 𝑦 + 2𝑋 ⊤ 𝑋𝛽 = 0 𝜕𝛽 𝑋 ⊤ 𝑋𝛽 = 𝑋 ⊤ 𝑦 ⇔ 𝛽 = 𝑋 ⊤ 𝑋 −1 𝑋 ⊤ 𝑦 𝑒𝑖2 = 𝑒 ⊤ 𝑒 = 𝑅𝑆𝑆 = 𝑖 = 𝑦 − 𝑋𝛽 ⊤ 𝑦 − 𝑋𝛽 = = 𝑦 ⊤ 𝑦 − 2𝑦 ⊤ 𝑋𝛽 + 𝛽⊤ 𝑋 ⊤ 𝑋𝛽 Дифференцирование 𝜕(𝑦 ⊤ 𝑋𝛽) 𝜕𝛽𝑘 = 𝜕( 𝑖 𝑃𝑖 𝛽𝑖 ) 𝜕𝛽𝑘 = 𝑃𝑘 ⇒ 𝑛 𝛽 ⊤ 𝑋 ⊤ 𝑋𝛽 = 𝑋𝛽 ⊤ 𝜕(𝑦 ⊤ 𝑋𝛽) 𝜕𝛽 2 𝑥𝑖𝑗 𝛽𝑗 𝑖=1 𝑚 𝑥𝑖𝑘 𝑖=1 𝑗=1 = 𝑋 ⊤ 𝑦, где 𝑃𝑖 = 𝑦 ⊤ 𝑋 𝜕(𝛽 ⊤ 𝑋 ⊤ 𝑋𝛽) ⇒ =2 𝜕𝛽𝑘 𝑥𝑖𝑗 𝛽𝑗 = 2 𝑋𝛽 𝑗=1 ⊤ 2 𝑚 𝑋𝛽 = 𝑛 = 𝑦⊤𝑋 ⊤𝑋 ⊤ = 2𝑋 ⊤ 𝑋𝛽 𝑛 𝑚 𝑥𝑖𝑘 𝑖=1 𝑖 𝑥𝑖𝑗 𝛽𝑗 𝑗=1 Метод наименьших квадратов: одномерный случай 𝑦1 𝑥1 1 𝑎𝑥1 + 𝑏 = 𝑦1 𝑎 … ⇔ … … = … ⇔ 𝑋𝛽 = 𝑦 𝑏 𝑦𝑛 𝑥𝑛 1 𝑎𝑥𝑛 + 𝑏 = 𝑦𝑛 Т.к. матрица X – не квадратная, то записать 𝛽 = 𝑋 −1 𝑦 нельзя Но Octave/MATLAB решит эту систему уравнений, если написать b=X\y >> x = (0:0.1:5)’; >> y = 2*x + 5 + randn(size(x)); >> X = [x ones(size(x))]; >> beta = X\y beta = 2.0653 4.7701 >> close all; >> plot(x,y,’bo’,’LineWidth’,2); >> hold on; >> yfunc = @(x)beta(1)*x+beta(2); >> plot(x,yfunc(x),’k-’,’LineWidth’,2); >> hold off; >> print(gcf,’graph’,’-dpng’,’-r75’); Задача: нахождение коэффициентов регрессии Шаг 1. Создать выборку точек x = rand(500, 1); y = rand(500, 1); z = 3*x+4*y+5+randn(size(x)); plot3(x,y,z,’bo’); Шаг 2. Записать и решить систему уравнений X = [x y ones(size(x))]; b = (X'*X)\(X'*z); format long; disp(b); xv = 0:0.1:1; [Xm,Ym]=meshgrid(xv,xv); Zm = b(1)*Xm + b(2)*Ym + b(3); hold on; mesh(Xm,Ym,Zm); hold off; Теорема Гаусса-Маркова Пусть выполняются следующие условия: 1. Модель правильно специфицирована 2. 𝑟𝑎𝑛𝑔 𝑋 = 𝑚, где m – число коэффициентов регрессии 3. 𝐸 𝜀𝑖 = 0 (нулевое матожидание ошибок регрессии) 4. 𝐸 𝜀𝑖 𝜀𝑗 = 𝐸 𝜀𝑖 𝐸 𝜀𝑗 = 0 (независимость ошибок друг от друга) 5. 𝑉𝑎𝑟 𝜀𝑖 = 𝐸 𝜀𝑖 𝜀𝑖 = 𝜎 2 (гомоскедастичность ошибок регрессии) Тогда оценки параметров регрессии методом наименьших квадратов являются наилучшими в классе линейных несмещённых оценок (англ. Best Linear Unbiased Estimator, BLUE). Ковариационная матрица Несмещённость оценок параметров регрессии 𝐸 𝛽 = 𝐸 𝑋 ⊤ 𝑋 −1 𝑋 ⊤ 𝑋𝐵 + 𝜀 = 𝐸 𝐵 + 𝑋 ⊤ 𝑋 −1 𝑋 ⊤ 𝐸 𝜀 = 𝐸[𝐵] B – истинное значение параметров регрессии, 𝜀 – вектор ошибок Ковариационная матрица ⊤ cov 𝛽, 𝛽 = 𝐸 𝛽 − 𝐵 𝛽 − 𝐵 = 𝐸 𝑋 ⊤ 𝑋 −1 𝑋 ⊤ 𝜀𝜀 ⊤ 𝑋 𝑋 ⊤ 𝑋 = 𝑋 ⊤ 𝑋 −1 𝑋 ⊤ 𝐸[𝜀𝜀 ⊤ ]𝑋 𝑋 ⊤ 𝑋 −1 = 𝜎 2 𝑋 ⊤ 𝑋 −1 −1 = B – истинное значение параметров регрессии, 𝜀 – вектор ошибок Вид ковариационной матрицы cov 𝛽, 𝛽 = Var[𝛽1 ] cov(𝛽1 , 𝛽2 ) cov(𝛽1 , 𝛽2 ) Var[𝛽2 ] ⋮ ⋮ cov(𝛽𝑚 , 𝛽1 ) cov(𝛽𝑚 , 𝛽2 ) ⋯ ⋯ cov(𝛽1 , 𝛽𝑚 ) cov(𝛽2 , 𝛽𝑚 ) ⋮ Var[𝛽𝑚 ] Доверительные интервалы 𝑠𝛽2𝑖 = Var[𝛽] Δ𝛽𝑖 = 𝑠𝛽𝑖 ⋅ 𝑡(𝛼, 𝑓) t – двухсторонний квантиль tраспределения; 𝛼 – вероятность, f = n – m – число степеней свободы Оценка ошибки регрессии Несмещённая оценка ошибки регрессии 𝜎2 1 = 𝑛−𝑚 𝑒𝑖2 𝑖 Проекционная матрица 𝑦 = 𝐻𝑦; 𝐻 = 𝑋 𝑋 ⊤ 𝑋 ⊤ 𝑒 𝑒 = 𝑛−𝑚 −1 𝑋 ⊤ Свойства 1. 𝐻 ⊤ = 𝐻 (симметричность) 2. 𝐻 2 = 𝐻 (идемпотентность) 3. 𝐻𝑋 = 𝑋 𝑒 =𝑦−𝑦 n – число точек, m – число коэффициентов регрессии Связь погрешности с проекционной матрицей 𝑒 = 𝑦 − 𝑦 = 𝐼 − 𝐻 𝑦 = 𝑀 𝑋𝐵 + 𝜀 = 𝑀𝜀; 𝑅𝑆𝑆 = 𝑒 ⊤ 𝑒 = 𝑀𝜀 ⊤ 𝑀𝜀 = 𝜀 ⊤ 𝑀𝜀 𝑒 ⊤ 𝑒 = tr 𝑒 ⊤ 𝑒 = tr 𝜀 ⊤ 𝑀𝜀 = tr 𝑀𝜀𝜀 ⊤ ⇒ 𝐸 𝑅𝑆𝑆 = 𝑡𝑟 𝑀𝐸 𝜀𝜀 ⊤ = 𝜎 2 tr(𝑀) Вычисление следа проекционной матрицы 𝑡𝑟 𝑀 = 𝑡𝑟 𝐼𝑛 − 𝑡𝑟 𝑋 𝑋 ⊤ 𝑋 −1 𝑋 ⊤ = 𝑛 − 𝑡𝑟 𝑋 ⊤ 𝑋 𝑋 ⊤ 𝑋 −1 =𝑛−𝑚 Задача: доверительные интервалы значений 𝜷 Шаг 1. Ошибка регрессии >> res = z–(b(1)*x+b(2)*y+b(3)); >> f = numel(res) - numel(b); >> sigma2 = res'*res/f sigma2 = 0.808416630656864 Шаг 2. Ковариационная матрица >> format short; >> C = sigma2 * inv(X'*X) C = 0.0204893 -0.0013650 -0.0096530 -0.0013650 0.0188808 -0.0085331 -0.0096530 -0.0085331 0.0106459 Шаг 3. Ошибки и доверительные интервалы коэффициентов >> sb = sqrt(diag(C));disp(sb'); 0.14314 0.13741 0.10318 >> db = sb * tinv(1-0.05/2,f); >> disp(db'); 0.28124 0.26997 0.20272 Шаг 4. Корреляционная матрица >> sbm = [sb sb sb]; >> r = C./(sbm.*sbm') r = 1.000000 -0.069400 -0.653593 -0.069400 1.000000 -0.601874 -0.653593 -0.601874 1.000000 Внимание! 𝒓 𝜷𝒊 , 𝜷𝒋 ≠ 𝟎 Оставляйте «запасные» знаки при округлении 𝜷! Шаг 4. R2 и F-критерий >> TSS = sum((z-mean(z)).^2) TSS = 1497.7 >> RSS = res'*res; RSS = 401.78 >> R2 = 1 - RSS/TSS; R2 = 0.73173 >> F = R2/(1-R2)*f/2 F = 677.80 >> finv(0.95,2,f) ans = 3.0139 Линеаризация многомерной нелинейной регрессии 1. Нелинейная зависимость 𝑐 𝑐𝑝 𝑇 = 𝑎 + 𝑏𝑇 + 𝑇 3. Система уравнений 𝑋𝛽 = 𝑦 1 𝑋= ⋮ 1 𝑇1 ⋱ 𝑇𝑛 𝑎 1/𝑇1 ⋮ ;𝛽 = 𝑏 𝑐 1/𝑇𝑛 2. Линеаризация 𝑐𝑝 𝑇 = 𝑎𝑥1 + 𝑏𝑥2 + 𝑐𝑥3 ; 𝑥1 = 1; 𝑥2 = 𝑇; 𝑥3 = 𝑇 −1 Доверительный интервал и интервал предсказания Доверительный интервал 𝒚 (confidence interval) 𝑦 ± 𝜎𝑡𝛼,𝑛−𝑚 𝑥 ⊤ 𝑋 ⊤ 𝑋 −1 𝑥 Исходная функция с вероятностью 95% проходит через этот интервал n=20 Интервал предсказания (prediction interval) 𝑦 ± 𝜎𝑡𝛼,𝑛−𝑚 1 + 𝑥 ⊤ 𝑋 ⊤ 𝑋 −1 𝑥 Новая точка попадёт в этот интервал с вероятностью 95% n=200