Э и ЭЭ 10 Стабилизаторы 2. 09.12.2012 20
advertisement

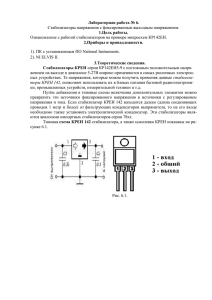
Стабилизаторы напряжения2. Слайд 1. Всего 20. КОМПЕНСАЦИОННЫЕ СТАБИЛИЗАТОРЫ Автор Останин Б.П. Конец слайда Стабилизаторы напряжения2. Слайд 2. Всего 20. Компенсационный способ стабилизации даёт: 1. Увеличение коэффициента стабилизации, 2. Уменьшение выходного сопротивления у стабилизаторов напряжения, 3. Увеличение выходного сопротивления у стабилизаторов тока, 4. Увеличение КПД у стабилизаторов постоянного напряжения (тока), 5. Возможность точной установки выходного напряжения (тока). Автор Останин Б.П. Конец слайда Стабилизаторы напряжения2. Слайд 3. Всего 20. Компенсационные стабилизаторы представляют собой замкнутые системы автоматического регулирования. Они делятся на: 1. Стабилизаторы с последовательным включением регулирующего элемента, 2. Стабилизаторы с параллельным включением регулирующего элемента Автор Останин Б.П. Конец слайда Стабилизаторы напряжения2. Слайд 4. Всего 20. Структурная схема компенсационного стабилизатора с последовательным включением регулирующего элемента IВХ IВЫХ РЭ СД Нагрузка UВХ UОП Автор Останин Б.П. UВЫХ ИОН Конец слайда Стабилизаторы напряжения2. Слайд 5. Всего 20. Структурная схема компенсационного стабилизатора с параллельным включением регулирующего элемента IВХ IВЫХ RБ IР UВХ РЭ Нагрузка UОП Автор Останин Б.П. СД UВЫХ ИОН Конец слайда Стабилизаторы напряжения2. Слайд 6. Всего 20. Структурная схема компенсационного стабилизатора как системы автоматического регулирования UОП UОС - UОП ИОН УПТ F1 UУПР F2 РЭ Нагрузка А UОС СД Изменения входного напряжения и тока нагрузки (дестабилизирующие факторы) учитывается воздействием возмущений F1 и F2. Автор Останин Б.П. Конец слайда Стабилизаторы напряжения2. Слайд 7. Всего 20. Передаточная функция компенсационного стабилизатора UОП F1 UОС - UОП ИОН УПТ UУПР F2 РЭ Нагрузка А UОС СД Из теории автоматического регулирования известно, что система, охваченная ООС, имеет передаточную функцию H ( p) Н(р) Н1(р) Н2(р) H 1 ( p) 1 H 1 ( p) H 2 ( p) - передаточная функция замкнутой системы с ООС; - передаточная функция цепи прямой передачи; - передаточная функция цепи обратной связи. Произведение Н1(р) Н2(р) является передаточной функцией разомкнутой системы, т.е. при разрыве цепи ОС, например, в точке А. Автор Останин Б.П. Конец слайда Стабилизаторы напряжения2. Слайд 8. Всего 20. Применительно к вышеприведённому рисунку передаточная функция компенсационного стабилизатора постоянного напряжения по управляющему воздействию НУ(р) может быть выражена в следующем виде: KУ ( p) K РЭ ( p) H y ( p) 1 KУ ( p) K РЭ ( p) ( p) КУ(р) - операторный коэффициент передачи усилителя постоянного тока (коэффициент усиления усилителя); КРЭ(р) - операторный коэффициент передачи регулирующего элемента по управляющему воздействию; (р) - операторный коэффициент передачи следящего делителя в цепи ОС (коэффициент деления делителя). Автор Останин Б.П. Конец слайда Стабилизаторы напряжения2. Слайд 9. Всего 20. Принципиальная схема компенсационного стабилизатора постоянного напряжения с последовательным включением регулирующего элемента IВХ VT1 + R1 UВХ _ Автор Останин Б.П. IБ1 IR2 IК2 UОП + IД R2 VT2 VD1 R3 С1 IБ2 UВЫХ RН IН R4 _ Конец слайда Стабилизаторы напряжения2. Слайд 10. Всего 20. IВХ VT1 + R1 UВХ _ IБ1 + IR2 IД R2 VT2 IК2 UОП R3 С1 IБ2 VD1 UВЫХ RН IН R4 _ Для увеличения коэффициента стабилизации по напряжению необходимо чтобы I К 2 I Б1 обычно достаточно I К 2 10I Б1 Выходное напряжение стабилизатора всегда имеет некоторое остаточное отклонение. Автор Останин Б.П. Конец слайда Стабилизаторы напряжения2. Слайд 11. Всего 20. В установившемся режиме U ВХ U ВЫХ U КЭ1 I R1 I Б1 0 Тогда I ВХ I H I Д I R 2 U ОП U ВЫХ В установившемся режиме IЭ2 = 0 и, следовательно, IR2 = ICT. IСТ - среднее значение тока через стабилитрон I СТ I СТ min I СТ max 2 - коэффициент деления следящего делителя Автор Останин Б.П. R4 R3 R4 Конец слайда Стабилизаторы напряжения2. Слайд 12. Всего 20. Величина мощности на регулирующем транзисторе в процессе работы всё время меняется, поддерживая неизменное значение мощности в нагрузке при R = const. Величина мощности, рассеиваемой на регулирующем транзисторе PК 1 U КЭ1 I К 1 U КЭ1 I ВХ PК 1 (U ВХ U ВЫХ )( I H I Д I R 2 ) Регулирующий транзистор работает в активной области, поэтому напряжение UКЭ1 на нём должно быть больше величины напряжения насыщения транзистора, к которому прибавляется амплитуда переменной составляющей входного напряжения UП U КЭ1 (U КЭ Н U П ) Автор Останин Б.П. Конец слайда Стабилизаторы напряжения2. Слайд 13. Всего 20. IВХ VT1 + R1 UВХ _ IБ1 IR2 IК2 UОП + IД R2 VT2 VD1 R3 С1 IБ2 UВЫХ RН IН R4 _ Минимальное значение напряжения на входе стабилизатора UВХmin при заданном UВЫХ находится по вышеприведённым формулам U ВХ U ВЫХ U КЭ1 I ВХ I H I Д I R 2 U ОП U ВЫХ U КЭ1 (U КЭ Н U П ) Автор Останин Б.П. Конец слайда Стабилизаторы напряжения2. Слайд 14. Всего 20. КПД стабилизатора постоянного напряжения определяется как отношение мощности на нагрузке к мощности, потребляемой от источника энергии постоянного тока с нестабилизированным напряжением UВХ при номинальном значении этого напряжения PH U ВЫХ I Н PВХ U ВХ НОМ I ВХ Обычно Тогда Автор Останин Б.П. I H ( I Д I R 2 ) U ВЫХ U ВХ Конец слайда Стабилизаторы напряжения2. Слайд 15. Всего 20. Источником опорного напряжения является параметрический стабилизатор, выполненный на стабилитроне VD1 и балластном сопротивлении R2 с коэффициентом стабилизации К СТ ПС R2 U ВЫХ ПС R2 U ОП R Д U ВХ ПС R Д U ВЫХ UВЫХ ПС - напряжение на выходе параметрического стабилизатора, т.е. UОП; UВХ ПС - напряжение на входе параметрического стабилизатора, т.е. UВЫХ; RД - дифференциальное сопротивление стабилитрона VD1. Автор Останин Б.П. Конец слайда Стабилизаторы напряжения2. Слайд 16. Всего 20. Поскольку параметрический стабилизатор подключается параллельно нагрузке, т.е. к выходному напряжению UВЫХ, стабильность опорного напряжения UОП выше стабильности выходного напряжения компенсационного стабилизатора в КСТ ПС раз. Автор Останин Б.П. Конец слайда Стабилизаторы напряжения2. Слайд 17. Всего 20. Тип стабилитрона выбирается в соответствии с соотношениями U ВХ U ВЫХ U КЭ1 I ВХ I H I Д I R 2 U ОП U ВЫХ Величина коэффициента деления следящего делителя выбирается обычно 0,4…0,9, что позволяет обеспечить достаточно высокий коэффициент стабилизации, а также возможность нормальной работы УПТ и источника опорного напряжения. Автор Останин Б.П. Конец слайда Стабилизаторы напряжения2. Слайд 18. Всего 20. Недостатками компенсационных стабилизаторов напряжения с непрерывным регулированием являются: 1. Необходимость применения тепловых радиаторов у регулирующего транзистора; 2. Большие масса и габариты, обусловленные применением радиаторов; 3. Невысокий КПД. Автор Останин Б.П. Конец слайда Стабилизаторы напряжения2. Слайд 19. Всего 20. Защита стабилизатора от перегрузки по току и короткого замыкания Основная задача защиты стабилизатора – автоматическое прекращение подачи энергии от выпрямителя через стабилизатор в неисправное устройство, потребляющее энергию. Плавкие предохранители и электромагнитные реле не могут оперативно защищать транзисторную аппаратуру из-за большой инерционности их работы. Наиболее рационально это достигается изменением режима работы регулирующего транзистора стабилизатора. Автор Останин Б.П. Конец слайда Стабилизаторы напряжения2. Слайд 20. Всего 20. Защита может осуществляться и постановкой регулирующего транзистора в дискретный режим работы, когда транзистор скачком переводится в режим отсечки при превышении током нагрузки допустимого значения. Достоинством такого режима работы является небольшая мощность, рассеиваемая на транзисторе при перегрузке или КЗ, а также почти полное отключение неисправной нагрузки от источника. Автор Останин Б.П. Конец слайда