Лекция 4
advertisement

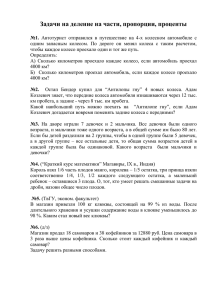
Лекция 4 1. 2. 3. План лекции Общие понятия о кривых движения Реализация сил тяги и торможения поезда Законы сцепления Кривыми движения ЭПС называются зависимости: V(t), V(l) и l(t). Кривые движения поезда V(t) и V(l) имеют вид: V b c V(l) l d lТ lI l П lВ L b VB VT a VП a tП O V(t) c tI tB TX tT d t tO 2 Форма кривых движения определяется характером изменения от скорости действующих на поезд сил F, W, B. Зависимости изменения сил F, W и B от скорости V приведены на рисунке 2. V W B F(V) VT B B+W VB A F-W VП F W, B O` O Рис. 2. Время движения TX по перегону от момента трогания до момента остановки в соответствии с основными режимами движения поезда разделяется на периоды движения под током tI, выбега tB и торможения tT. В первый период разгона поезда, называемый периодом пуска, сила тяги F поддерживается постоянной (участок О`А). Период пуска заканчивается при скорости VП (при RП=0). Далее сила тяги F меняется уже автоматически по характеристике ТЭД (участок АВ) т.к. при пуске (F-W) меняется мало, то V(t) изображается линией Оa. При скорости VП (пусковая скорость) поезд переходит к движению по характеристике ТЭД (участок ab). В точке b выключаются ТЭД и ЭПС начинает двигаться по инерции с незначительно уменьшающимся замедлением (действует сила W). Период торможения начинается в точке (с) при скорости VT. Характер кривой торможения определяется зависимостью (B+W)=f(V). Сумма ходового времени TX и остановки tO называется временем сообщения TC=TX+tO. Зависимость V=f(l) можно построить по кривой V=f(t). Пройденный поездом путь, например lI-lП – в пределах изменения скорости от VП до VВ равен VВ lI lП V (t )dt VП Этот интеграл есть площадь ограниченная кривой V(t) в пределах взятого изменения скорости 3 2. Реализация сил тяги и торможения поезда 4 2.1. Образование силы тяги Изменение скорости движения тела или системы тел может совершаться только под влиянием внешних сил, действующих на тело или систему тел. Момент развиваемый двигателем, сам по себе не может перемещать центр тяжести поезда (т.к. это внутренние силы). Образование силы тяги, как внешней силы, происходит у поезда через сцепление колес с поверхностью пути. Gk – давление колеса на путь; MJ – момент инерции колеса и вращающихся частей двигателя MJ MO MW O и редуктора; MO – момент, приложенный к колесу. Направление движения FO Gk FO Rk O TO Заменим МО парой сил FO и F`O, приложенных в точках O и О` с плечом равным Rk. Эта пара сил стремится повернуть колесо вокруг геометрической оси О`. Сила FO стремиться создать проскальзывание поверхности колеса относительно пути в точке О. Противоположно силе FO по касательной к колесу возникает внешняя по отношению к колесу сила трения TO, препятствующая проскальзыванию поверхности колеса относительно рельса. Если сила FO не превзойдет некоторой предельной величины, то точка колеса, соприкасающаяся с поверхностью пути, окажется как бы неподвижной и явится мгновенным центром вращения (МЦВ), вокруг которого в этот момент под действием вращающего момента начнут поворачиваться все остальные точки колеса. Внешняя сила TO будет непрерывно перемещать мгновенный центр вращения, а вместе с ним и колесо вдоль пути, причем в соприкосновение с поверхностью пути будут приходить все новые и новые точки поверхности колеса, становящиеся каждая в соответствующий момент мгновенными центрами вращения. 5 Сила FО≡MО называется просто силой тяги, а TO – силой сцепления колеса и рельса. При равномерном движении и отсутствии трения в подшипниках сила TO, была бы равна FO. В общем случае, при ускоренном или замедленном движении колес и наличии трения в подшипниках FO≠TO. Тогда действующий на колесо результирующий момент равен d MJ J dt MW Mд = MO – MJ - MW - момент вращения от влияния инерции колеса и связанных с ним вращающихся частей; - момент вращения от внутреннего трения в подшипинках; M W W RK ; W (4.1) - сила сопротивления движению от трения в подшипниках; - угловая скорость вращения колес; 6 При ускоренном движении колеса и наличие трения сила сцепления TO<FO и равна: J d TO FO W Rk dt (4.2) Процесс качения колеса был рассмотрен без учета упругих деформаций в точке О касания колеса и пути. На рельсовом транспорте эти деформации практически не оказывают влияния на соотношение силы тяги и вращающего момента ТЭД. На безрельсовом транспорте радиус круга качения по сравнению с радиусом ненагруженного колеса зависит от нормального давления Gk. Это необходимо учитывать в данной формуле. 7 8 2.2. Образование тормозной силы Под действием нормального давления имеет место сцепление колеса с поверхностью сцепления, вследствие чего колесо не скользит, а катится. К колесу прикладывается тормозной момент MOT. Заменим MOT парой сил BO и Направление B`O. Т.к. точка О является неподвижной в движения каждый мгновенный момент времени, то MJ момент MOТ препятствует повороту колеса MOT вокруг точки «О». Сила TO препятствует MW перемещению мгновенного центра Gk вращения. B O O TO Rk O BO TO – внешняя по отношению к колесу сила направлена навстречу движению является тормозной силой, замедляющей инерционное движение колеса. Сила BO≡MOT называется тормозной силой на ободе колеса, а внешняя сила TO – силой сцепления колеса и рельса. 9 Действующий момент в режиме торможения равен: Mд = MOT + MJ + MW (4.3) Сила сцепления при торможении равна: TO BO J d W Rk dt (4.4) 3. Законы сцепления Силы сцепления, возникающее как реакция сил тяги, торможения и внутренних сил трения, передаваемых через колеса, имеют некоторый предел. Если силы тяги или торможения, создаваемые на колесах двигателями или тормозными устройствами, будут превосходить этот предел, то равновесие сил в точках соприкосновения колес и пути нарушится. Поэтому максимальные значения сил тяги и торможения колеса FOмакс и BOмакс должны ограничиваться такими величинами, которые не превосходили бы пределов по условиям сцепления. J d W TOпред Rk dt (4.5) J d W TOпред Rk dt (4.6) FO max BO max Для заданных материалов колес и пути, состояния их поверхностей, удельных давлений на поверхности соприкосновения, предельную силу сцепления полагают тождественной давлению колеса на путь. TOпп 1000 k Gk (4.7) k - коэффициент пропорциональности, коэффициент W сцепления колеса. J d W Rk dt (4.8) J d 1000 k Gk W Rk dt (4.9) FO max 1000 k Gk BO max J d Rk dt и W сравнительно малы по отношению к можно пренебречь, тогда законы сцепления упрощенном виде для одного колеса: k Gk и ими запишутся FO max 1000 k Gk (4.10) BO max 1000 k Gk (4.11) в 10 Эти выражения записаны для колеса, а в целом для поезда Bmax 1000 Gт Fmax 1000 Gсц 11 (4.12) Fmax - максимальная допустимая суммарная сила тяги поезда, не вызывающая буксование ни одного из движущих осей; Bmax - наибольшая допустимая суммарная тормозная сила поезда не вызывающая юза ни одной из тормозных осей; - коэффициент сцепления поезда; Gсц - вес поезда приходящийся на все движущие оси при движении на горизонтальном участке; Gт - вес поезда приходящийся на все тормозные оси поезда. F z FO B z BO 12 Законы сцепления: 1. Сила тяги не может быть больше предельной силы сцепления F FO Tпр 2. Максимальная по условию сцепления сила тяги поезда равна предельной силе сцепления Fmax Tпр 1000 Gсц Для двухосных троллейбусов Gсц 2 Gтрол 3 Для трамвайного вагона со всеми ведущими осями Gсц Gтрам