Силовой анализ и синтез кулачковых механизмов
advertisement

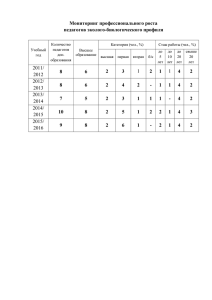
Лекция 20. Силовой анализ и основы синтеза кулачковых механизмов Основные вопросы: 1.Определение сил, действующих в кулачковом механизме. 2.Влияние отдельных параметров на величину сил и коэффициент полезного действия. 3.Предварительные рекомендации по синтезу кулачковых механизмов. Определение сил, действующих в кулачковом механизме Основная задача динамики кулачковых механизмов – анализ сил и условий, обеспечивающих нормальное взаимодействие звеньев. Силы, действующие на толкатель. P сумма заданных сил сопротивлений: Q действующая по линии движения толкателя (си полезного сопротивления); Gт Fпр сила тяжести толкателя; сила упругости замыкающей пружины; Fтр сумма сил трения,Fтр Fa Fb ; F2ин сила инерции; Pa , Pb силы давления со стороны опоры (стойки) на толкате a b углы трения . Уравнение равновесия сил, действующих на кулачок, в векторной форме P F2ин Pa Pb Pд 0. Силы Pa , Pb , Pд определяются графическим способом. Уравнение равновесия моментов относительно т. a М а Pb c cos Pд m sin 0. Относительно т. b M b Pa c cos Pд (m c) sin 0. Из уравнений равновесия Pд sin Pa cos Pb cos c cm m K План сил Масштаб плана F2ин K P ос Н мм Из плана P K oa [H]; Pa K ab [H]; Pb K bc [H]; . Влияние угла давления . Из рисунка: при увеличении угла уменьшается длина отрезка oc ; при некотором oc 0 и K P F2ин . 0 Следовательно Pa ; Pb ; Pд , т.е. движение кулачка невозможно (самоторможение). oc 0 также при: увеличении m; уменьшении c; увеличении углов трения. КПД кулачкового механизма – отношение работы сил полезных сопротивлений к работе движущей силы на возможных перемещениях точек приложения этих сил: Wп.с. Wд Qds . Pдdscos 3 0, 2m 1 f c 1tg. При кр происходит самоторможение (заклинивание) Отсюда 2 m 1 f c 1tgкр 0. tgкр c . f (c 2m) Допустимый угол давления доп кр. доп уменьшается при увеличении f и m. доп 300 Предварительные рекомендации по синтезу кулачковых механизмов Синтез кулачковых механизмов – процесс создания (проектирования) механизма, способного обеспечить воспроизведение требуемой функции движения ведомого звена при соблюдении заданных условий действия. Задачи, решаемые при синтезе: разработка наиболее целесообразной схемы кулачкового механизма и определение размеров его звеньев; выбор функции или графика движения ведомого звена; построение профиля кулачка, при котором обеспечивается заданное движение толкателя; динамические расчеты механизма; расчеты деталей на прочность и надежность. Исходные данные для проектирования профиля кулачка: кинематическая схема механизма; закон движения выходного звена в функции обобщенной координаты; некоторые основные размеры звеньев. опт и доп из соотношения При заданном значении опт 1 f c c2m tgдоп tgдоп 1опт f c c2m Пример: опт 0,85; f 0,3; tgдоп 0,5; m 0; доп 270. Пример проектирования профиля кулачка Условия технологического процесса: 1.При повороте кулачка на угол 720 толкатель начинает движение вверх с постоянной скоростью. 2.При повороте на угол 1700 толкатель достигает наивысшего положения, поднявшись на высоту Н. 3.При вращении кулачка от 1700 до 2100 толкатель остается неподвижным в своем верхнем положении. 4.При вращении кулачка от 2100 до 2640 кулачок опускается в крайнее нижнее положение. 5.Кулачок вращается с постоянной скоростью. Последовательность решения задачи: 1.По осям абсцисс откладывается время оборота кулачка Т (отрезок Х). Масштаб времени Kt T X c мм 2.Назначаются масштабы: длины K L м , мм скорости K м , с мм м ускорения K w с2 мм 3.Вычисляются и изображаются на графике отрезки a K L мм Kt K v b Kv мм Kt K w 4.От = 00 до =720 толкатель неподвижен в крайнем нижнем положении. Следовательно, v f (t) прямая, лежащая на оси абсцисс. = 720 до =1700 толкатель движется с 5.От постоянной скоростью. v f (t) прямая AB , параллельная горизонтальной оси, а s f (t ) прямая AB. =1700 до =2100 толкатель неподвижен в 6.От крайнем верхнем положении. s f (t ) Прямая BC , параллельная горизонтальной оси. 7.От вниз. = 2100 до = 2640 толкатель опускается Требование: параметры движения на этом участке должны обеспечивать минимальные нагрузки на звенья (максимальное снижение ускорения толкателя). Из графиков: при =720 и =1700 скорость толкателя изменяется мгновенно, следовательно, ускорение его должно быть бесконечно большим. Поэтому необходимо скорректировать профиль кулачка. Для этого в профиль кулачка вводят так называемые переходные участки, профиль которых может быть задан различными способами (дугами окружностей, в аналитическом виде). Замена ломаной ОАВ кривой, описываемой уравнением s f (t ) Графики изменения кинематических параметров с коррекцией движения на переходных участках A1 A2, B1B2 (ускорения постоянные)