Content_DP_part_4_220301
advertisement

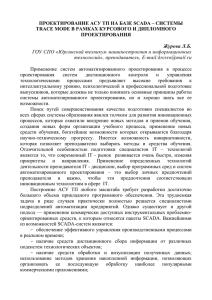
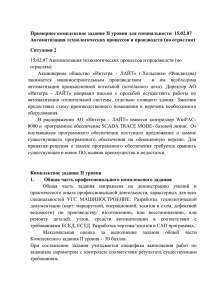
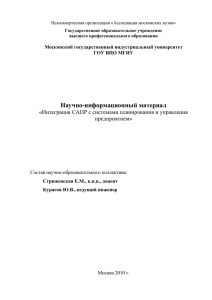
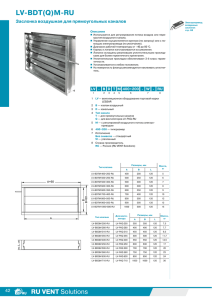
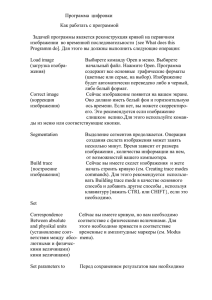
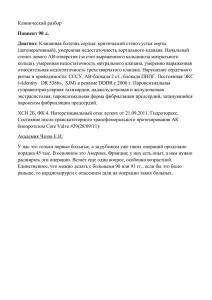
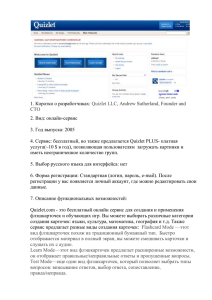
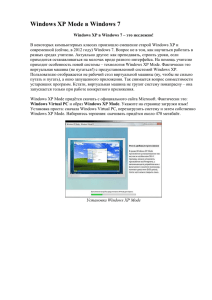
Пояснения к содержанию 4 раздела дипломного проекта специальности 220301 Алгоритмизация программ контроля и управления (4.1) Содержание подраздела: схемы программ регулирования технологических параметров, контроля и сигнализации, комбинационного (ситуационного) управления, снабженные текстовым описанием. Требования к составлению алгоритмической схемы в дипломном проекте: • Обозначения выполняются по ГОСТ 19.701-90 • Для каждой программы составляется отдельная алгоритмическая схема • Вложенные циклы в алгоритмах для программ ПЛК не допускаются! • Блоки «начало» и «конец» присутствуют всегда! • Программы ПАЗ, аварийной сигнализации и регулирования объединять нельзя! • Каждый алгоритм снабжается текстовым описанием. • Текстовые пояснения выполняются по РД 50-34.698-90 и должны включать наименование алгоритма, его назначение, перечень входных и выходных массивов информации (входные и выходные переменные), взаимосвязь с алгоритмами других программ (если она есть) и описание его логической структуры, т.е. способа формирования результатов решения с указанием последовательности этапов расчета, расчетных и (или) логических формул, используемых в алгоритме. • В схемах вместо текстовых формулировок рекомендуется применять обозначения в виде переменных с указанием присваиваемых или анализируемых значений. • Абстрактные формулировки типа «регулируем», «увеличить подачу газа» и т.д. и т.п. не допускаются! Разработка алгоритма управления технологическим процессом (4.1) Пример описания алгоритма регулирования температуры по ПИД-закону. ИУ – клапан с ЭП, управляемый по 3х-позиционному закону Алгоритм программы ПИД-регулирования температуры Входными данным для работы программы является требуемая температура подогреваемого газа (уставка Тsp), измеренная температура (текущее значение Tpv), измеренный расход топливного газа (Fpv) и величина зоны нечувствительности привода клапана (DB). В результате вычисления рассогласования по температуре подогреваемого газа ∆T как разности заданной уставки Tsp и температуры газа Tpv на данный момент, по формуле Fsp=ƒ(∆T), где ƒ-функция ПИД-закона, определяется требуемое расчетное значение расхода топливного газа. Затем в результате аналогичного вычисления рассогласования по расходу ∆F определяется требуемое (расчетное) положение рабочего органа клапана POSsp. Вычисленное в свою очередь рассогласование по положению ∆POS является основанием для определения необходимости выработки управляющего воздействия: в случае если рассогласование по положению ∆POS меньше величины зоны нечувствительности DB, выработки воздействия не производится и выходные сигналы трехпозиционного регулятора (открытие – OPN, закрытие – CLS) равны нулю. В противном случае определяется направление перемещения рабочего органа – на открытие или на закрытие в зависимости от знака рассогласования по положению. При отрицательном значении ∆POS выполняется закрытие клапана (CLS=1, OPN=0), при положительном – открытие (CLS=0, OPN=1). Выходными данными программы регулирования являются дискретные сигналы управления пусковой аппаратурой клапана – OPN и CLS. Алгоритмизация программ контроля и управления (4.1) Алгоритм программы двухпозиционного регулирования температуры с симметричным гистерезисом Tsp – заданная температура (уставка) Tpv – измеренная температура ON – управление реле нагревателя (ON=1 – вкл., ON=0 – выкл.) H – гистерезис Const – присваивание переменной ее собственного значения (глобальная переменная, отсутствие модификации) Принципы разработки проекта в Trace Mode6 Общие указания разработки проекта в Trace Mode: Для получения подписей по подразделам 4.2-4.4 необходимо принести 2 выполненных проекта: рабочий (для как бы реального оборудования с аппаратными тегами в соответствии с выбранным контроллером) и эмуляцию, в которой вместо реального технологического процесса используется его программно реализованная математическая модель. Эмуляция должна быть работоспособной, а поведение модели технологического процесса и управление им должны быть эквиваленты реальному процессу как по физическим явлениям, так и по значениям технологических параметров. Программа и материал: Для разработки проекта использовать базовую версию Trace Mode 6.09 Расширенная анимация для Trace Mode 6 (извлекается в папку C:\Program Files\AdAstra Research Group\Trace Mode IDE 6 Base\Lib\Animation) Полезные учебные материалы по разработке проекта в Trace Mode 6 Канал "TRACE MODE SCADA/HMI Video" на YouTube (видео простого проекта здесь и здесь) и на сайте Адастры Примеры выполнения имитационных программ и рабочих проектов в Trace Mode (модели выполнены в базовой версии) Разработка человеко-машинного интерфейса (4.2) Содержание подраздела: скриншот разработанного интерфейса (запущенного на исполнение в профайлере проекта), скриншот итоговой таблицы аргументов экрана и краткое текстовое описание основных элементов экрана и способов воздействия через них на ТП или информации, отображаемой данными элементами. Написание пользовательских программ управления (4.3) Содержание подраздела: скриншоты либо листинги программ, а также скриншоты аргументов программ. Каждая программа должна быть снабжена текстовым описанием, содержащим наименование программы, ее назначение, описание структуры программы и функций ее составных частей, а также связей с другими программами, если они присутствуют. Все скриншоты и листинги должны быть выполнены с рабочих программ (не с программ-эмуляторов). Пример описания программы сигнализации по температуре и уровню Программа предупредительной сигнализации по уровню и температуре теплоносителя предназначена для уведомления оператора о превышении температуры сырья выше допустимого предела и о снижении уровня теплоносителя в расширительной емкости ниже безопасного значения. Структура программы представлена боками «больше» для контроля температуры и «меньше» – для уровня, выполняющим функции сравнения входных значений с датчиков с заданными пороговыми значениями и формирующими единичные выходные логические сигналы TAH=1 и LAL=1 в случае, если выполняется условие IN1>IN2 для TAH и IN1<IN2 для LAL соответственно. Таким образом, если температура выше установленного значения в 75 градусов, происходит срабатывание аварийной сигнализации по температуре сырья. Аналогично, если уровень теплоносителя понижается ниже 50%, срабатывает аварийная сигнализация по уровню теплоносителя. Все последующие примеры программ являются примерами рабочих программ и содержат только краткое описание принципа работы. Программы эмуляторы смотрите в примерах выполнения имитационных проектов Написание пользовательских программ управления (4.3) Пример программы каскадного ПИД-регулирования; ИУ – клапан с ЭП, управляемый по 3х-позиционнному закону В результате вычисления рассогласования по температуре как разности между уставкой и значением, поступившим с датчика температуры теплоносителя, по ПИД-закону вычисляется требуемое значение расхода. Аналогично, поскольку в системе реализован каскадный регулятор, вычисляется требуемое положение рабочего органа регулирующего клапана. Данное значение, выраженное в процентах, поступает на командный вход блока управления клапаном (CMD), работающего в режиме отслеживания, т.е. осуществляющего позиционирование рабочего органа в соответствии с входным сигналом задания путем подачи дискретных выходных сигналов (OPN, CLS) на пусковую аппаратуру электропривода клапана. Контроль положения осуществляется по сигналу обратной связи с датчика положения рабочего органа (CDI), а также от концевых выключателей положения (IOP, ICL). Написание пользовательских программ управления (4.3) Пример программы табличного управления на языке ST Программа представляет собой реализацию табличного управления. В зависимости от диапазона, в который попадает температура окружающего воздуха Tv, производится присваивание переменной Tsp (уставка по температуре) определенного значения. Написание пользовательских программ управления (4.3) Пример программы каскадного ПИД-регулирования; ИУ – клапан с ЭП, управляемый аналоговым сигналом В результате вычисления рассогласования по температуре (блок «X-Y») между заданным (Т_sp) и измеренным (ТE) значениями блоком ПИД-регулятора производится расчет требуемого значения расхода. Затем по рассогласованию расхода вычисляется задание по положению клапана, которое передается на позиционер интеллектуального клапана. Написание пользовательских программ управления (4.3) Пример программы двухпозиционного регулирования уровня: ИУ-электродвигатель насоса Поддержание уровня осуществляется на уровне 60% с гистерезисом 5%. Для осуществления управления величина текущего уровня, поступающая на блок двухпозиционного регулирования в миллиметрах, переводится в проценты. Пример программы технологической блокировки После подачи команды на запуск (Старт) выполняется программная задержка (wait) на проверку величины давлений. В случае, если величина давления после НВД меньше 15 кгс/см2, а после ННД – 0,5 кгс/см2, выполняется остановка насосов (START_нвд=0; START_ннд=0), а клапану выдается команда на закрытие. Конфигурирование информационных потоков (4.4) Содержание подраздела: приводится скриншот навигатора проекта в развернутом виде, а также скриншоты настройки параметров аппаратных тегов. Текстовое описание включает обоснование использования тех или иных тегов источников/приемников и разъяснения конкретных значений задаваемых параметров их настройки. Конфигурирование информационных потоков заключается в создании узлов (RTMдля АРМ, Embedded_RTM либо MicroRTM для контроллеров в зависимости от их вида) и задании их параметров сетевого обмена, вызове экранов и программ в соответствующих узлах с помощью каналов класса CALL, создании аппаратных тегов с помощью встроенных драйверов или через OPC-сервер или настроив обмен по протоколам (например, группы Modbus). Аппаратные теги настраиваются в зависимости от вида тега. Подробно параметры настройки описаны в справке по каждому виду тегов, а также описываются в видео, посвященных подключению контроллеров на Канале "TRACE MODE SCADA/HMI Video" на YouTube и на сайте Адастры. Созданные аппаратные теги в узлах реализуются в виде каналов классов FLOAT и HEX16(32) в зависимости от типа тега, по которому они строятся, и привязываются к аргументам экранов и программ. Список поддерживаемого Trace Mode 6 оборудования и методов связи, представлен здесь Конфигурирование информационных потоков (4.4) Пример навигатора проекта 2 узла (АРМ и контроллер), аппаратные теги построены через встроенные драйвера Так как для управления используется контроллер I-7188XC, создадим в слое источники/приемники группу OEM_Lagoon7000#1 (встроенные драйвера) и в ней создадим группу X-202 с 7 аналоговыми входами, соответствующую мезонинному модулю X-202, а также группу 7188XC-512 для размещения в ней дискретных входов и выходов контроллера. Поскольку обмен данными осуществляется по последовательной сети, в узле создается COM-порт Конфигурирование информационных потоков (4.4) Пример навигатора проекта 1 узел (АРМ), обмен данными через OPCсервер Создадим узел типа RTM с поддержкой графических экранов для АРМ оператора. Создание узла для ПЛК не предусматривается, поскольку в ПЛК Direct Logic установка программного обеспечения Trace Mode не предполагается. Обмен между ПЛК и АРМ оператора осуществляется через OPC-сервер. Разработку начнем от слоя источники/приемники для чего создадим в одноименном слое группу OPC. Создадим аппаратные теги, соответствующие компонентам OPC, используемым для обмена данными: получение данных от датчиков температуры (TE), расхода (FE), уровня (LE); выработки управляющих воздействий на позиционер клапана (POS), управления пускателем подпитывающего насоса (NS) и др. Конфигурирование информационных потоков (4.4) Пример настройки аппаратных тегов Настройка параметров аппаратного тега, описывающего подключение датчика с унифицированным токовым выходным сигналом 4…20 мА к 3 входу (нумерация в окне параметров с 0) модуля I-8017H, установленному в 1 слот PC-based контроллера WinPAC-8841 Пример настройки подключения через OPC-сервер. Здесь датчик подключен к 1 аналоговому входу платы National Instruments