Угловая скорость
advertisement

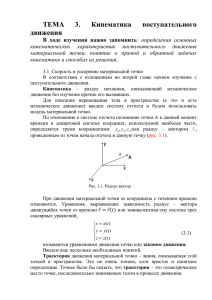
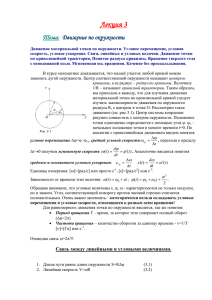
Механика - часть физики, в которой изучаются закономерности механического движения и причины, вызывающие или изменяющие это движение. Физические модели в механике Физические модели - модели, применяемые в механике для описания движения тел (изменения с течением времени взаимного расположения тел или их частей) в зависимости от условий конкретных задач. Материальная точка - тело, обладающее массой, размерами которого в данной задаче можно пренебречь. Понятие материальной точки - абстрактное, но его введение облегчает решение практических задач. Например, изучая движение планет по орбитам вокруг Солнца, можно принять их за материальные точки. Произвольное макроскопическое тело или систему тел можно мысленно разбить на малые взаимодействующие между собой части, каждая из которых рассматривается как материальная точка. Тогда изучение движения произвольной системы тел сводится к изучению системы материальных точек. В механике сначала изучают движение одной материальной точки, а затем переходят к изучению движения системы материальных точек. Абсолютно твердое тело - тело, которое ни при каких условиях не может деформироваться и при всех условиях расстояние между двумя точками (точнее, между двумя частицами) этого тела остается постоянным. Абсолютно упругое тело - тело, деформация которого подчиняется закону Гука, а после прекращения действия внешних сил принимает свои первоначальные размеры и форму. Абсолютно неупругое тело - тело, полностью сохраняющее деформированное состояние после прекращения действия внешних сил. Система отсчета. Кинематические уравнения движения Тело отсчета - произвольно выбранное тело, определяется положение других (движущихся) тел. относительно которого 2 Положение любого движущегося тела определяется по отношению к телу отсчета, поэтому механическое движение относительно. Система координат - система (в простейшем, случае прямоугольная декартова система xyz (см. рисунок 1)), связанная с телом отсчета. Система отсчета - совокупность тела отсчета, связанной с ним системы координат и Рисунок 1 синхронизированных между собой часов. Кинематические уравнения движения материальной точки Положение материальной точки A в декартовой системе координат определяется тремя координатами x , y , z или радиусом-вектором r (он проводится из начала отсчета координат O в точку A ). При движении материальной точки ее координаты с течением времени изменяются, поэтому ее движение определяется записанной системой скалярных уравнений или эквивалентным ей векторным уравнением. Траектория, длина пути, вектор перемещения Траектория - линия, описываемая движущейся материальной точкой (или телом) относительно выбранной системы отсчета. В зависимости от формы траектории различают прямолинейное движение, криволинейной движение, движение по окружности и т. д. Вид траектории зависит от характера движения материальной точки и от системы отсчета. 3 Вектор перемещения - вектор r r2 r1 , проведенный из начального положения движущейся точки в положение ее в данный момент времени (приращение радиус-вектора точки за рассматриваемый промежуток времени). Длина пути - длина участка траектории АВ, пройденного материальной точкой за данный промежуток времени: скалярная функция S S t — времени. При прямолинейном движении вектор перемещения совпадает с соответствующим участком траектории и модуль перемещения r равен пройденному пути S : r S . Рисунок 2 Плоское движение - движение, при котором все точки траектории лежат в одной плоскости. Поступательное движение твердого тела - движение, при котором любая прямая, жестко связанная с движущимся телом и проведенная через две произвольные точки данного тела, остается параллельной самой себе (см. рисунок 3). При поступательном движении все точки тела движутся одинаково, поэтому его поступательное движение можно охарактеризовать Рисунок 3 движением какой-то произвольной точки тела (например, движением центра масс тела). Вращательное движение твердого тела - движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной прямой, называемой осью вращения. Различные точки твердого тела движутся по-разному, поэтому его вращательное 4 движение нельзя охарактеризовать движением какой-то одной точки. КИНЕМАТИКА ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ Скорость Скорость - векторная величина, которая определяет как быстроту движения, так и его направление в данный момент времени. Средняя скорость - векторная величина, определяемая отношением приращения r v t радиус-вектора точки r к промежутку времени t , в течение которого это приращение произошло. Направление вектора средней скорости совпадает с направлением r . Рисунок 5 Мгновенная скорость - векторная величина, определяемая первой производной радиус-вектора движущейся точки по времени. r dr v lim dt t 0 t Вектор мгновенной скорости направлен по касательной к траектории в сторону движения (см. рисунок 5). Модуль мгновенной скорости равен первой производной пути по времени. r r s ds v v lim lim lim t 0 t t 0 t dt t 0 t Проекции вектора скорости на оси координат vx dy dx dz ; v y ; vz dt dt dt x, у, z — соответственно проекции радиус-вектора на оси координат. Рисунок 6 Движение в одной плоскости v v x v y , v v x2 v 2y , v x v cos , v y v sin , tg vy vx Ускорение и его составляющие 5 Ускорение - характеристика неравномерного движения, определяющая быстроту изменения скорости по модулю и направлению. Среднее ускорение – векторная величина, равная отношению изменения скорости v v a t к интервалу времени t , за которое это изменение произошло. Мгновенное ускорение – векторная величина, определяемая первой производной v dv a lim t 0 t dt скорости по времени Составляющие ускорения тангенциальная a dv dt характеризует быстроту изменения скорости по модулю (направлена но касательной к траектории, см. рисунок 7). Рисунок 7 нормальная an v2 r характеризует быстроту изменения скорости по направлению (направлена к центру кривизны траектории, см. рисунок 7). dv a a a n Полное ускорение при криволинейном движении - геометрическая dt сумма тангенциальной и нормальной составляющих ускорения. a a2 an2 модуль полного ускорения. Классификация движения в зависимости от тангенциальной и нормальной составляющих ускорения aτ an 0 0 Движение прямолинейное равномерное 6 aτ = a = const 0 прямолинейное равнопеременное aτ = f(t) 0 прямолинейное с переменным ускорением 0 const равномерное по окружности 0 ≠0 равномерное криволинейное const ≠0 криволинейное равнопеременное aτ = f(t) ≠0 криволинейное с переменным ускорением Путь, пройденный материальной точкой за промежуток времени от t1 до t 2 s v(t )dt Для определения s надо знать функцию vt . t2 t1 Тогда пройденный путь за промежуток времени от t1 до t 2 определяется заштрихованной на рисунке площадью. Рисунок 8 КИНЕМАТИКА ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА Элементарный угол поворота, угловая скорость Элементарный угол поворота ( d ) Элементарные (бесконечно малые) повороты рассматривают как векторы. Модуль вектора d равен углу поворота, а его направление совпадает с направлением поступательного движения острия винта, головка которого Рисунок 9 вращается в направлении движения точки по окружности, т. е. подчиняется правилу правого винта. Угловая скорость lim t 0 t Вектор направлен вдоль оси вращения по правилу правого винта, т. е. так же, как и вектор d (см. рисунок 10). 7 Рисунок 10 Векторная величина, определяемая первой производной угла поворота тела по времени. Связь модулей линейной и угловой скоростей Рисунок 11 Связь векторов линейной и угловой скоростей v r Положение рассматриваемой точки задается радиусом вектором r (проводится из лежащего на оси вращения начала координат 0). Векторное произведение r совпадает по направлению с Рисунок 12 вектором v и имеет модуль, равный r sin R , т. е. v r . Единица угловой скорости - 1 рад с . Псевдовекторы (аксиальные векторы) - векторы, направления которых связываются с направлением вращения (например, d , ). Эти векторы не имеют определенных точек приложения: они могут откладываться из любой точки на оси вращения. Равномерное движение материальной точки по окружности Равномерное движение по окружности - движение, при котором материальная 8 точка (тело) за равные промежутки времени проходит равные по длине дуги окружности. Угловая скорость const : ( — угол поворота). t Период вращения Т - время, за которое материальная точка совершает один полный оборот по окружности, т. е. поворачивается на угол 2 . Так как промежутку времени t T соответствует 2 , то 2 . T Частота вращения - число полных оборотов, совершаемых материальной точкой при равномерном ее движении по окружности, в единицу времени. Характерная особенность равномерного движения по окружности Равномерное движение по окружности — частный случай криволинейного движения. Движение по окружности со скоростью, постоянной по модулю ( v const ), является ускоренным. Это обусловлено тем, что при постоянном модуле направление скорости все Рисунок 13 время изменяется. Ускорение материальной точки, равномерно движущейся по окружности a 0 Тангенциальная составляющая ускорения при равномерном движении точки по окружности равна нулю. составляющая ускорения (центростремительное v 2 Нормальная an r ускорение) направлена по радиусу к центру окружности (см. рисунок 13). В любой точке окружности вектор нормального ускорения перпендикулярен вектору скорости. Ускорение материальной точки, равномерно движущейся по окружности в любой ее точке, центростремительное. Угловое ускорение. Связь линейных и угловых величин 9 Угловое ускорение - векторная величина, определяемая первой производной угловой скорости по времени. Направление вектора углового ускорения При вращении тела вокруг неподвижной оси вектор углового ускорения направлен вдоль оси вращения в сторону вектора элементарного приращения угловой скорости. При ускоренном движении вектор сонаправлен вектору , при замедленном – противонаправлен ему. Вектор — псевдовектор. Единица углового ускорения - 1 рад с2 . Связь линейных и угловых величин ( R — радиус окружности; v — линейная скорость; a — тангенциальное ускорение; a n — нормальное ускорение; — угловая скорость).