Лекция 3 Тема: Движение по окружности
advertisement

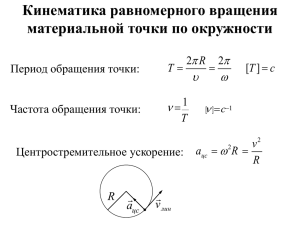
Лекция 3 Тема: Движение по окружности Движение материальной точки по окружности. Угловое перемещение, угловая скорость, угловое ускорение. Связь линейных и угловых величин. Движение точки по криволинейной траектории, Понятие радиуса кривизны. Вращение твердого тела с неподвижной осью. Мгновенная ось вращения. Качение без проскальзывания. В курсе математике доказывается, что малый участок любой кривой можно заменить дугой окружности. Центр соответственной окружности называют центром кривизны, а ее радиус – радиусом кривизны. Величину 1/R – называют кривизной траектории. Таким образом, мы приходим к выводу, что для изучения движения материальной точки по произвольной кривой следует изучить закономерности движения по окружности радиуса R, с центром в точке О. Рассмотрим такое движение (см. рис.3.1). Центр системы координат разумно совместить с центром окружности. Положение точки однозначно определяется с помощью угла . о – начальное положение точки в момент времени t=0. По аналогии с прямолинейным движением введем понятия угловое перемещение = - o, средней угловой скорости ср , переходя к пределу t d t0 получим мгновенную скорость (t ) (t ) . Аналогично вводятся понятия dt d среднего и мгновенного углового ускорения. ср (t ) (t ) dt t Единицы измерения: []=[рад/с] или просто с-1, []=[рад/с2] или с-2. t 2 Зависимости от времени этих величин: (t ) 0 t ; (t ) 0 0 t . 2 Обращаю внимание, что угловые величины , , - характеризуются не только модулем, но и знаком. Угол, соответствующий повороту против часовой стрелки считается положительным. Очень важно запомнить- категорически нельзя складывать угловые перемещения и угловые скорости, относящиеся к разным осям вращения! Для равномерного движения точки по окружности вводятся, так же понятия: Период вращения Т – время, за которое тело совершает полный оборот (=2) Частота вращения – количество оборотов за единицу времени - =1/Т []=[Гц] или с-1. Очевидна связь =2/Т. Связь между линейными и угловыми величинами. 1. Длина пути равна длине окружности S=R 2. Линейная скорость V=R (3.1) (3.2) Для определения зависимости для линейного ускорения рассмотрим движение точки за время t (см. рис. 3.2.а) Приведем вектора v0 , v к общему началу С (Рис.3.2.б). Углы между взаимно – перпендикулярными сторонами равны, поэтому угол между v0 , v - . Приращение скорости v удобно представить, как сумму двух векторов v v v|| . Вектор v (АВ) "отвечает" за изменение скорости по направлению, v|| (BD) – за изменение скорости по модулю. При t0 вектор v можно считать dv dv dv|| перпендикулярным векторам v0 , v . Ускорение точки a dt dt dt То есть ускорение можно представить, как сумму двух взаимно – перпендикулярных слагаемых: 1. нормальное ускорение, перпендикулярное скорости dv vd v2 2 v R an dt dt R (3.3) 2. касательное (тангенсальное) ускорение – направленное по касательной к dv|| траектории dt a . Легко увидеть, что при равномерном движении нормальная составляющая ускорения в 0 не обращается! Нормальная составляющая еще называется центростремительным ускорением, из-за ее направленности к центру окружности. Полное ускорение точки определяется соотношением a an2 a2 (3.4) Пример 1. С самолета, летящего горизонтально со скоростью V0 c,сбрасывают тело. Определить кривизну траектории через время . Решение. Поскольку, на свободно падающее тело действует только сила тяжести, которая сообщает ему ускорение g, то нормальное и тангенсальное ускорения являются проекциями вектора g нормаль и касательную к траектории (см. рис.3.3). Угол легко вычислить (см. пример 2 лекция 10.2). Тогда an g sin . Радиус кривизны вычисляем по формуле 3.3 an v2 v2 откуда R R g sin В некоторых случаях угловую скорость удобно рассматривать как вектор, направленный вдоль оси вращения. Направление определяется правилом правого винта (буравчика). Если вращать рукоятку по направлению вращения тела, то поступательное движение буравчика покажет направление угловой скорости (рис. 3.4). Тогда вектор скорости можно представить как векторное произведение v r . Модуль векторного произведения равен v r sin , а направления результирующего вектора выбирается таким образом, что а) он перпендикулярен плоскости, в которой лежат перемножаемые вектора; б) если мысленно поворачивать первый множитель в сторону второго, то результирующий вектор будет перемещаться в туже сторону, что и буравчик. Вращение твердого тела с неподвижной осью. Если твердое тело движется таким образом, что траектории всех его точек лежат в параллельных плоскостях, то такое его движение называют плоским. Часто удобно рассматривать плоское движение, как вращение вокруг некоторой прямой, называемой мгновенной осью вращения. Для нахождения мгновенной оси вращения будем рассуждать так. При вращении скорости всех точек тела направлены по касательным к траекториям. Поэтому ось вращения лежит на пересечения перпендикуляров, проведенных к любым векторам скоростей движущихся точек. Пример 2. Тонкий стержень АВ длиной L скользит по сторонам прямого угла (рис. 3.5). Определить скорость точки А в тот момент, когда он будет составлять угол с горизонталью, если известно, что скорость точки В в этот момент равна V. Решение. Определим мгновенную ось вращения стержня С в тот момент, когда он образует угол с горизонталью. Для этого достаточно знать направление векторов скоростей двух его точек (см.рис.3.5). Относительно этой оси угловые скорости точек А и В в заданный момент V V будут одинаковы А=В или A B . RA=L cos, а RB=L R A RB sin - это видно из рисунка. Тогда VA=VB ctg. Качение без проскальзывания. Частный случай плоского движение – это качение цилиндра (рис. 3.6).. При таком движении скорость поступательного движения равна линейной скорости вращательного движения точек на его поверхности. На рис. 3.6 (а) показаны скорости различных точек цилиндра относительно точки, лежащей на линии касания цилиндра с поверхностью. На рис. 3.6 (b) – относительно центра цилиндра. Действительно, если выбрать в качестве оси вращения точку А – то скорость VB= 2R, если точку О, то VB=R+V (V=R). Угловая скорость одинакова и не зависит от выбора оси.