Математическое моделирование производственных процессов Ю. Н. Алпатов Учебное пособие
advertisement

Ю. Н. Алпатов
Математическое моделирование
производственных процессов
Учебное пособие
Братск
2014
1
УДК 05.13.021
УДК 653.54
Алпатов Ю. Н. Математическое моделирование систем управления. Учебное
пособие для вузов. – Братск:. БрГУ, 2014. – с.
В пособии приведены методы моделирования и исследования систем
управления для практического закрепления вопросов, изложенных в
учебниках по теории системного анализа. Тематика работ согласована с
учебным планом курса, специализируемого в области управления
производственными процессами.
Рецензент: Мухопад Ю. Ф., д. т. н., профессор (ИрГУПС)
2
Введение
Основное содержание пособия является сборником лабораторных
работ, рекомендуемых при изучении основ математического анализа и
синтеза систем автоматического управления. Предлагаемые работы
обеспечивают закрепление теоретических знаний и приобретение
практических навыков при моделировании объектов. Выполнение работ
рассчитано на использование распространенных типов ЭВМ со стандартным
программным обеспечением для ввода и редактирования данных в
диалоговом режиме.
Лабораторные работы тематически образуют четыре группы: глава 1
посвящена топологическим методам анализа и синтеза систем управления;
глава 2 – моделированию компонент систем управления; глава 3 –
моделированию технологических процессов лесного производства; глава 4 –
моделированию производственных процессов.
В зависимости от объема часов, выделяемых для лабораторных работ,
и характера специализации студентов возможны варианты составления цикла
лабораторных работ из числа представленных в пособии.
3
Глава 1 Топологические методы анализа и синтеза
систем управления.
1.1. Топологический метод идентификации системы
управления.
Цель работы: ознакомить студентов с методикой идентификации систем
управления
1.1.1. Методика выполнения работы
Современные системы управления объединяют широкое разнообразие
физических компонентов или элементов. Следовательно, математическая
дисциплина, предназначенная для исследования систем управления, должна
давать полное представление о системах различной физической природы.
Такое представление о системах можно получить с помощью линейных
графов.
Прежде чем изложить методику моделирования систем с
использованием метода графов рассмотрим общие топологические свойства
графов и связь этих свойств со структурой системы управления.
Структурные схемы систем управления можно рассматривать как
топологические объекты и для них можно сформулировать топологические
формулы.
Введем ряд понятий и определений с целью разработки правила
построения графа по структурной схеме системы.
При структурно-параметрическом исследовании системы в качестве
переменных целесообразно рассматривать искомую структуру с
неизвестными параметрами, поэтому вершинам графа поставим в
соответствии операторы системы, а дугам – сигналы системы. Такой вид
графа назовем структурным графом (С-граф). Каждая ветвь графа
отображает причинно-следственную связь между переменными (вершинами)
и изображается ориентированными ветвями.
В соответствии с геометрическими образами структурных схем для
С-графа введем определения узлов 1, 2 и 3-го рода.
Определение 1. Узлами первого ряда называются узлы графа,
содержащие не менее двух входящих и одну выходящую ветви
(суммирующие узлы).
4
Определение 2. К узлам второго рода относятся узлы С-графа,
содержащие одну входящую и не менее двух выходящих ветвей (узлы
ветвления).
Определение 3. Узлами третьего рода называются узлы с единичной
передачей, содержащие одну входную и одну выходную ветви.
На рис. 1.1 изображено геометрическое представление узлов 1, 2 и 3го родов. Операторы вершины для узлов всех родов принимаем равными 1.
1
1
X1
X2
1
1
X4
X3
X1
X2
1
X3
1
1
1
1
X1
X2
1
X4
1
1
1
(в)
(б)
(а)
Рис 1.1. Геометрическое представление узлов:
(а) - узел 1-го рода; (б) - узел 2-го рода; (в) - узел 3-го рода
С помощью введенной классификации узлы произвольной формы
можно всегда свести к указанным трем видам. Например, задан сложный
узел (рис 1.2 (а) ). Используя метод расцепления узла, приводим его к узлам
всех трех видов (рис. 1.2. (б) )
1
1
X1
X2
1
1
X1
X2
1
X5
X3
1
1
X4
X4
1
X6
1
X7
X5
X3
1
1
1
1
б)
а)
Рис.1.2. Преобразование узлов
5
1
Описанное представление узлов позволяет установить правила
построения графа по известной структурной схеме системы. В таблице 1
указана идентификация элементов структурной схемы с элементами С-графа,
где линии структурной схемы соответствует ветвь графа с переменной 𝑥𝑖 ;
структурному звену – узел графа с оператором, равным W(S) звена;
сумматору – узел 1-го рода; точке ветвления – узел 2-го рода.
Таблица 1.
Таблица идентификации узлов С-графа структурной
схеме
Название величины
действия
1. Переменная
величина (сигнал)
Элементы структурной
схемы
𝑥𝑖
2. Передаточная
функция
3. Точка суммирования
переменных
Элемент С-графа
𝑥𝑖
𝑊(𝑆)𝑖
𝑊(𝑆)𝑖
X1
1
X3
X1
X2
X2
1
1
X3
1
1
4. Точка ветвления
переменных
X2
X1
X3
1
X1
1 X2
X3
1
На рис.1.3 изображена структурная схема системы управления, и
изоморфный ей С-граф на рис. 1.4. Вход и выход системы на С-графе
обозначаются единичными узлами. Последовательная цепь звеньев
структурной схемы (рис. 1.3) на графе (рис. 1.4) разбивается единичным
узлом 3-го рода, например, на сигналы: 𝑥5′ ; 𝑥5 ; 𝑥6′ ; 𝑥6 . Узел данного рода
вводится для разделения входных и выходных сигналов операторов системы,
соединенных последовательно.
6
X8
X0
X1
X2 𝑊1 (𝑆)
X3
X6
X4 𝑊2 (𝑆) X5 𝑊3 (𝑆)
X11
X13
X9
𝑊5 (𝑆)
𝑊4 (𝑆)
X7
X14
X10
𝑊6 (𝑆)
X12
𝑊7 (𝑆)
X16
X15
𝑊8 (𝑆)
Рис. 1.3. Структурная схема системы управления
𝑊5 (𝑆)
X9
X8
1 X0
1 X1
1 X2 𝑊1 (𝑆)
X3
X13
X4
1
𝑊2 (𝑆) 𝑋 ′ 1 X 𝑊3 (𝑆)
5
5
𝑋6′
1 X6 𝑊4 (𝑆)
1
X7
X11
𝑊7 (𝑆)
X14
X10
𝑊6 (𝑆)
X12
X16
X15
𝑊8 (𝑆)
Рис. 1.4. Изоморфный системе управления С-граф
Таким образом, структурная схема системы управления с помощью
введенных понятий узлов 1-го, 2-го и 3-го родов может быть сведена к
С-графу (рис. 1.4.).
Математическую модель системы по С-графу запишем в виде
следующих матричных уравнений. Матричное представление любой модели
позволяет в рациональной форме получить запись и использовать машинные
методы решения задачи.
Зависимость параметров системы от входных сигналов выражается
уравнением компонент графа
𝑋 = 𝐵 ∙ 𝑋вх
7
(1.1)
𝑥0
1
𝑥1
𝐵1
𝑥2
0
∙
0
∙ = ∙
∙
∙
𝑥𝑛−1
0
[ 𝑥𝑛 ] [ 0
0
0
1
𝐵2
∙
∙
0
0
∙
∙
∙
∙
∙
∙
∙
∙
∙
∙
∙
∙
∙
∙
∙
∙
∙
∙
∙
∙
∙ 𝐵𝑛−1
∙
0
𝑥0
0
𝑥2
0
𝑥4
0
∙
0
∗ ∙ ,
∙
∙
∙
𝑥
0
𝑛−2
1] [ 𝑥𝑛 ]
(1.2)
где
Х - матрица столбец С-графа, порядка 𝑛1 = 𝑛 + 1
B - матрица коэффициентов (операторов) системы, порядка (𝑛1 ∗ 𝑚), m –
число входных сигналов графа.
𝑋хв - матрица столбец входных символов графа
𝐵𝑛 – оператор компоненты графа.
В уравнение (1.2) записываются связь выходной и входной величин
компоненты (звена) и дополняются системой тождеств
𝑥𝑖 = 𝑥𝑖
i = (1,2 . . . . . . n)
Входными будем называть сигналы входящие в узлы, имеющие
оператор, и не являющиеся узлами 1-го и 2-го родов.
Матрица X заполняется путём записи в возрастающем порядке
индексов сигналов графа 𝑥𝑖 , 𝑖 = 0, 𝑛. Матрица столбец 𝑋вх заполняется в
возрастающем порядке индексов только входящих сигналов:
𝑋вх𝑗
j = (0,1,2,3 . . . . . . . . .,m)
Матрица B заполняется операторами, равными 1 для тождеств 𝑥𝑖 =
𝑥𝑖 и операторами звеньев системы 𝐵𝑛−𝑗 .
Матричное уравнение, отражающее структуру С-графа, записываем
уравнением для узлов 1,2,3 родов.
𝐴∙𝑋 =0
(1.3)
8
Для узлов 1-го рода ветви, входящей в узел, присваивается +1,
выходящей из узла присваивается -1, а не инцидентной узлу -0.
Для узлов 2-го рода, исходя из определения 2, записываем уравнения
всех сочетаний пар входящей и выходящих дуг, обходя узел, например, по
часовой стрелке (рис. 1.5.). Входящей дуге 1 в строке матрицы узлов
записываем +1, а первой выходящей дуге 2
1
записываем -1, затем формируем вторую
x2
строку матрицы узлов, где следующей парой
4
3
будут ветви 1 и 3, присваивая 1-ой ветви +1, и
2
x3
1
3-ей -1. и т.д. Для каждого узла формируем
1
x1
столько строк матрицы, сколько имеем
сочетаний для пар входящей и выходящих
x4
дуг. Остальные столбцы в строке заполняем
1
нулями.
Рис. 1.5. Узел 2-го рода
Уравнения
формируются как и уравнения узлов 2-го рода.
узлов
3-го
рода
Подставляя в (1.3) из (1.2) значения X, получим матричное уравнение
С-графа:
𝐴 ∗ 𝐵 ∗ 𝑋вх = 0
(1.4)
Уравнение (1.4) полностью отражает структуру графа, так как при
записи уравнения (1.2) записаны уравнения компонент, а при записи
уравнения (1.3) – уравнения узлов 1-го, 2-го, 3-го родов. Это уравнение будет
использовано при анализе и синтезе систем управления.
1.1.2 Порядок выполнения работы
Методику разработки уравнения С-графа покажем на примере.
Пусть задана структурная схема системы управления (рис. 1.6), где
𝑥0 ÷ 𝑥12 сигналы; A, B, C, D, E, M – операторы звеньев. По структурной
схеме построим С-граф (рис. 1.7). Не усложняя изложения, положим: заданы
𝑥0 ; 𝑥10 = 𝑥12 , операторы A, B, C, D, E и следует определить M.
9
X0
X1
X2
X4
X3
𝐵
X7
𝐶
X5
X8
X9
𝐷
X12
𝑀
X6
X11
X10
E
Рис. 1.6. Структурная схема системы управления.
1
1
X0
A
X1
1
X2
𝐵
X3
2
1
𝐶
X4
X7
X5
3
1
X8
𝐷
X9
4
1
X12
1
X6
𝑀
X10
X11
𝐸
Рис. 1.7. Структурный граф системы.
По С-графу записываем уравнение компонент (1.2)
𝑥0 𝑥2 𝑥4 𝑥6
𝑥0
1
𝑥1
𝐴
𝑥2
0
𝑥3
0
𝑥4
0
𝑥5
0
𝑥6 = 0
𝑥7
0
𝑥8
0
𝑥9
0
𝑥10
0
[𝑥11 ] [ 0
0
0
1
𝐵
0
0
0
0
0
0
0
0
0
0
0
0
1
𝐶
0
0
0
0
0
0
0
0
0
0
0
0
1
𝑀
0
0
0
0
𝑥8 𝑥10
0
0
0
0
0
0
0
0
1
𝐷
0
0
0
0
0
𝑥0
0
𝑥2
0
𝑥4
0
∗ 𝑥
0
6
𝑥
8
0
0 [𝑥10 ]
0
1
𝐸]
Переменную
𝑥12 не записываем в уравнение, т. к. 𝑥12 = 𝑥10 будет
записанным тождеством 𝑥10 . Для записи уравнения узлов выделяем на
С-графе (рис. 1.7) узлы 1, 2, 3-го рода: 1, 2 – 1-го рода, узлы 3, 4 – 2-го рода,
узлов 3-го рода нет. Формируем матричное уравнение
10
𝑥0 𝑥1
1р
1
2
2р. 3
2р. 4
0
0
0
0
[0
𝑥2 𝑥3 𝑥4 𝑥5
𝑥6
𝑥7 𝑥8
𝑥9 𝑥10
1 −1 0 0 0
0 0 1 −1 0
0 0 0 0 1
0 0 0 0 1
0 0 0 0 0
0
0
0
−1
0
0 0 0 0
1 0 0 0
0 −1 0 0
0 0 0 0
0 0 1 −1
𝑥0
𝑥1
𝑥2
𝑥11
𝑥3
1
𝑥4
0
𝑥5
0 × 𝑥 =0
6
0
𝑥7
0]
𝑥8
𝑥9
𝑥10
[𝑥11 ]
(1.6)
Подставим в уравнение (1.6) уравнение компонент (1.5) и получим
уравнение системы:
𝑥0 𝑥2 𝑥4 𝑥6 𝑥8 𝑥10
𝑥0 𝑥1
0
0
0
0
[0
𝑥2 𝑥3 𝑥4 𝑥5
1 −1 0 0 0
0 0 1 −1 0
0 0 0 0 1
0 0 0 0 1
0 0 0 0 0
𝑥6
0
0
0
−1
0
𝑥7 𝑥8
𝑥9 𝑥10
0 0 0 0
1 0 0 0
0 −1 0 0
0 0 0 0
0 0 1 −1
1
𝐴
𝑥11
0
0
1
0
0
0
0 ×
0
0
0
0]
0
0
0
[0
0
0
1
𝐵
0
0
0
0
0
0
0
0
0
0
0
0
1
𝐶
0
0
0
0
0
0
0
0
0
0
0
0
1
𝑀
0
0
0
0
0
0
0
0
0
0
0
0
1
𝐷
0
0
0
0
0
𝑥0
0
𝑥2
0
𝑥4
0
× 𝑥 = 0 (1.7)
0
6
𝑥
0
8
[𝑥10 ]
0
0
1
𝐸]
Перемножив матрицы в уравнении (1.7), получим:
𝐴 −1 0
0
0 𝐵 −1 𝑀
0 0
𝐶
0
0 0
𝐶 −1
[0 0
0
0
𝑥0
0
𝐸
𝑥2
0
0
𝑥4
−1 0 × 𝑥 = 0
6
0
0
𝑥8
𝐷 −1] [𝑥 ]
10
Из уравнения (1.8) находим:
𝑀=
1
𝑥0
− 𝐴𝐵𝐷
− 𝐵𝐷𝐸 ,
𝐶
𝑥10
𝑀=
1
𝐴
− 𝐵𝐷 (
+ 𝐸) ,
𝐶
𝑊𝑇
11
т. е.
(1.8)
где 𝑊𝑇 =
𝑥10 (𝑆)
𝑥0 (𝑆)
– передаточная функция замкнутой системы (Т. З). Таким
образом, полученное матричное уравнение позволит проводить исследование
системы и выполнить структурно-параметрический синтез системы
управления.
1.1.3. Задание.
1. Изучить методику выполнения лабораторной работы.
2. Задан вариант структурной схемы системы управления (рис 1.8)
1)
W4
X1
X2
W1A
X3
W2
X5
W3
X4
W5
2)
W5
X1
W1
W2
X2
W3
X4
12
W4
W6
X3
3)
X1
W1
X2
W2
W3
X5
X6
W4
W5
W6
4)
W6
X1
W1
X2
X3
W2
W3
X5
W4
X4
W5
Рис. 1.8 Структурные схемы систем управления.
Таблица 2. Параметры звеньев системы управления.
Варианты
1
2
3
4
10
5
=
0,1 ∙ 𝑆 + 1
15
=
0,2 ∙ 𝑆 + 1
20
=
0,2 ∙ 𝑆 + 1
10
10
0,2𝑆 + 1
10
0,15𝑆 + 1
30
0,2𝑆 + 1
10
15
0,2𝑆 + 1
20
0,15𝑆 + 1
20
0,2𝑆 + 1
10
20
0,2𝑆 + 1
25
0,15𝑆 + 1
25
0,2𝑆 + 1
Параметры
𝑊1 = 𝐾1 = 10
𝐾2
𝑊2 =
𝑇2 + 1
𝐾3
𝑊3 =
𝑇3 + 1
𝐾4
𝑊4 =
𝑇4 + 1
13
𝐾5
𝑇5 + 1
𝐾6
𝑊6 =
𝑇6 + 1
𝑊5 =
4
0,1 ∙ 𝑆 + 1
2
=
0,1 ∙ 𝑆 + 1
=
5
0,4𝑆 + 1
7
0,5𝑆 + 1
3
0,5𝑆 + 1
10
0,5𝑆 + 1
2
0,6𝑆 + 1
20
0,5𝑆 + 1
3. По структурной схеме построить С-граф системы управления.
4. Построить матрицу компонент, матрицу структуры С-графа.
5. Получить математическую модель системы управления
(1.7)
𝐴 ∗ 𝐵 ∗ 𝑋вх = 0
6. Из уравнения (1.8) определить величину 𝑊5 при 𝑊𝑇 (𝑆) =
15
𝑆
.
1.1.4. Контрольные вопросы.
1. Изучить критерии устойчивости систем управления.
2. Ознакомиться со способами коррекции динамических свойств системы
управления.
1.2 Метод синтеза одномерных систем управления.
Цель работы: изучить методику структурного синтеза одномерных систем
управления.
1.2.1. Методика выполнения работы.
Проектирование системы уравнения рассматривают как структурнопараметрический синтез, при котором необходимо определить структуру и
параметры звеньев системы. Следовательно, задачу синтеза системы можно
сформулировать следующим образом.
Необходимо спроектировать систему, удовлетворяющую передаточной
функции 𝑊𝑇 (𝑆). Можно так же исходить из условия задания 𝑥вх (𝑆) и 𝑥вых (𝑆),
так как 𝑊𝑇 (𝑆) =
𝑋вых (𝑆)
𝑋вх (𝑆)
для данной системы. Теоретически передаточная
функция системы может быть определена по различным критериям. Из
условий статического расчета или технической предопределенности часть
структурных звеньев системы априорно определена. Следовательно,
необходимо путем введения дополнительных звеньев в структуру системы
14
получить оператор, удовлетворяющий условию 𝑊П (𝑆) = 𝑊𝑇 (𝑆), где 𝑊П (𝑆) –
передаточная функция синтезируемой системы.
Допустим, необходимо спроектировать систему, удовлетворяющую
оператору 𝑊𝑇 (𝑆), структурная схема которой заранее выработана и
представлена на рис. 1.9. Пусть дано 𝑥вых (𝑆), 𝑥вых (𝑆), 𝑊1 (𝑆), 𝑊2 (𝑆), 𝑊0 (𝑆).
Необходимо определить 𝑊3 (𝑆) В дальнейшем, для удобства записи
переменных оператор S опустим. Для синтеза системы построим С-граф (рис.
1.10) по структурной схеме системы уравнения (рис. 1.9)
W1
Xвх
X3
W2
X2
X1
W0
Xвых
W3
X4
Рис. 1.9. Структурная схема синтезируемой системы.
1
X 1 W1 X 2
1
W
X3
1
X4
X5
W0
X6
1
X7
1
X8
X9
W3
Рис. 1.10. С-граф системы.
Информацию о структуре системы, содержащуюся в данном графе запишем с
помощью матричного уравнения AB ⋅ 𝑋вх = 0 или в развернутом виде
0
0
[
0
0
1 −1 0 0 0
0 0 1 −1 0
0 0 0 0 1
0 0 0 0 1
1
𝑊1
0
0
0 1
0
0
0 0
]× 0
−1 0 0
0
0 −1 0
0
0
[0
15
0
0
1
𝑊2
0
0
0
0
0
0
0
0
0
1
𝑊0
0
0
0
0 0
0 0
𝑥1
0 0
𝑥3
0 0
0 0 × 𝑥5 = 0
𝑥7
0 0
[
𝑥8 ]
1 0
0 1
0 𝑊3 ]
(1.9)
Перемножив матрицы в уравнение (1.9), получим:
A ⋅ B ⋅ 𝑋вх = H𝑋вх = 0
(1.10)
где 𝐻 = 𝐴 ∙ 𝐵 – матрица операторов или
𝑊1
0
[
0
0
𝑥
1
−1 0
0 𝑊3
𝑥3
𝑊2 −1 0
0
] 𝑥 =0
0 𝑊0 −1 0 𝑥5
0 𝑊0 0 −1 [𝑥7 ]
8
(1.11)
Порядок матрицы H
в уравнении (1.11) равен [4x5], а количество
неизвестных параметров в уравнении (1.11) равно 3 (𝑥3 , 𝑥5 , 𝑊3 ) и две
последние строки матрицы отображают тождества. В результате имеется 2
уравнения при 3𝑥 неизвестных параметрах. Следовательно, получение
однозначного решения не имеем. Для того, что бы доопределить уравнение
(1.11), необходимо иметь дополнительно уравнения узлов 1-го рода, которые
определяют порядок матрицы А. В этом случае имеем широкие возможности
использовать информацию, заключенную в структуре сложной системы
управления. Это возможно достигнуть, преобразовав узлы 3-го рода в узлы 1го рода с помощью простейшего структурного преобразования
элементарного звена, как показано на рис. 11
X2
X1
W
X1
X2
W1
X4
X3
W2
Рис. 1.11. Эквивалентное преобразование звена.
Здесь звено с оператором W представлено в виде двух параллельных
𝑊
одинаковых звеньев 𝑊1 = 𝑊2 = . Используя этот приём, мы можем каждое
2
неизвестное звено системы представлять в виде двух (или более)
параллельных. Выведены соотношения, позволяющие определять количество
таких преобразований звеньев в зависимости от исходного задания.
Уравнение (1.11) необходимо дополнить одним соотношением,
поэтому произведем структурное преобразование одного искомого звена W2.
16
Представим его в виде 𝐴 = 𝐵 =
𝑊
2
. По преобразованному С-графу
(рис. 1.12) составляем матрицу компонент и матрицу структуры:
A
X6
X5
1
X1
W1
X2
1
X3
1
B
X4
1
X9
W0
X10
X13
1
X8
X7
X11
X12
W3
Рис. 1.12. С-граф преобразованой структуры системы.
1
2
3
4
5
6
7
8
9
10
11
12
0
0
2р 0
0
1р 0
3р [0
1р
3р
1
0
0
0
0
0
𝑥1
1
𝑥2
𝑊1
𝑥3
0
𝑥4
0
𝑥5
0
𝑥6
0
𝑥7 = 0
𝑥8
0
𝑥9
0
𝑥10
0
𝑥11
0
[𝑥12 ] [ 0
0 0
0 0
1 0
1 0
0 1
0 𝐴
0 0
0 0
0 0
0 0
0 0
0 0
0
0
0
0
0
0
1
𝐵
0
0
0
0
−1 0
0 0 0 0
1 −1 0 0 0 0
0
1 −1 0 0 0
0
1
0 0 −1 0
0
0
0 1 0 1
0
0
0 0 0 0
0
0
0
0
0
0
0
0
1
𝑊0
0
0
0
0
0
0
−1
0
0 1
0 2
0 3
0 4 𝑥1
0 5 𝑥3
0 6 𝑥5
×
0 7 𝑥7
0 8 𝑥9
0 9 [𝑥11 ]
0 10
1 11
𝑊3 ]12
0
0
0
0
0
1
Подставив в (1.13) уравнение (1.12), получим:
17
(1.12)
𝑥1
𝑥2
𝑥3
𝑥4
0 1
𝑥5
0 0
𝑥6
0 0
× 𝑥 = 0 (1.13)
0 0
7
𝑥
0 0
8
𝑥9
−1 0]
𝑥10
𝑥11
[𝑥12 ]
0
0
2р 0
0
1р 0
2р[0
1
3
1
0
0
0
0
0
−1
1
0
0
0
0
0
−1
1
1
0
0
0
0
−1
0
0
0
0
0
0
0
1
0
0
0
0
−1
0
0
0
0
0
0
1
0
0
0
0
0
−1
0
0
0
0
0
0
1
0
0
0
0
0
−1
1
𝑊1
0
0
1
0
0
0 × 0
0
0
0
0
0
0]
0
0
[0
0
0
1
1
0
0
0
0
0
0
0
0
0
0
0
0
1
𝐴
0
0
0
0
0
0
0
0
0
0
0
0
1
𝐵
0
0
0
0
0
0
0
0
0
0
0
0
1
𝑊0
0
0
0
0
0
𝑥1
0
𝑥3
0
𝑥5
0
×
0
𝑥7 = 0 (1.14)
0
𝑥9
0
[𝑥11 ]
0
1
𝑊3 ]
В результате перемножения матриц в (1.14) находим уравнение системы
(1.15)
1
2
3
4
5
6
1р
2р
1
2
3
4
5
6
𝑊1
0
0
0
0
[0
−1 0
0
0 𝑊3 𝑥1 1
𝑥3 2
0
0
0
0
0
𝑥5 3
1 −1 0
0
0
𝑥7 4= 0
1
0 −1 0
0
𝑥9 5
0
𝐴
𝐵 −1 0
0
0
0 𝑊0 −1] [𝑥11 ] 6
(1.15)
Матричная форма записи позволяет записать уравнение в сжатой форме,
делают удобным обращение с нею, облегчают получение некоторых групп
неизвестных, причем часто отпадает необходимость вычислять остальные
неизвестные.
Однородное матричное уравнение (1.15) можно представить в виде
блочных подматриц:
[
𝐻1
𝐻3
𝐻2 𝑋1
] [ ]=0
𝐻4 𝑋2
Формулы умножения матриц показывают, что можно считать
подматрицы 𝐻1 , 𝐻2 , 𝐻3 , 𝐻4 , 𝑋1 , 𝑋2 составными элементами и записать в виде:
𝐻1 𝑋1 + 𝐻2 𝑋2 = 0
𝐻3 𝑋1 + 𝐻4 𝑋2 = 0
Исключив из этой системы 𝑋2 , получим:
[𝐻3 − 𝐻4 𝐻2−1 ∙ 𝐻1 ] ∙ ⌊𝑋1 ⌋ = 0
или
[𝐻 ′ ∙][𝑋1 ] = 0
где 𝐻2−1 - матрица обратная подматрице 𝐻2 ;
𝐻 ′ = [𝐻3 − 𝐻4 ∙ 𝐻2−1 ∙ 𝐻1 ] – преобразованная матрица.
18
(1.16)
Условием решения уравнения (1.16) будет соотношение
𝑑𝑒𝑡𝐻2 ≠ 0
(1.17),
которое позволяет сократить размерность матричного уравнения (1.16).
Для использования возможности операции (1.16) необходимо
провести дополнительные преобразования матрицы (1.15) Вначале
произведем перестановку столбцов в матрице H (второй, третий и четвертый
столбцы переставим на четвертую, пятую и шестую позицию, а пятый и
шестой соответственно на вторую и третью позицию) и, соответственно,
переставив строки в матрице X, получаем уравнение (1.17)
𝑊1
0
0
0
0
[0
1
0 𝑊3 −1 0
0
−1 0
0
𝐴
𝐵
𝑊0 −1 0
0
0
0
0
0
0
0
0
0
1 −1 0
0
0
1
0 −1]
5
6
2
3
𝑥1
𝑥9
𝑥11
𝑥3 = 0
𝑥5
[ 𝑥7 ]
(1.17)
4
Затем произведём в уравнении (1.17) перестановку только пятой и шестой
строчку на вторую и третью позицию в матрице H:
H1
H2
𝑊1
0
𝑊3
−1
0
0
𝑥1
0
0
0
1
−1
0
𝑥9
0
0
0
1
0
0
−1
0
0
𝐴
𝐵
𝑥3
0
𝑊0
−1
0
0
0
𝑥5
0
0
0
0
0 ] [ 𝑥7 ]
[0
H3
−1 𝑥11
𝑋вх1
=0
(1.18)
𝑋вх2
H4
Разделим уравнение (1.18) на подматрицы:
𝑊1
𝐻1 = [ 0
0
0
0
0
𝑊3
0 −1 0
−1 0
0
]
;
𝐻
=
[
]
;
𝐻
=
[
0 𝑊0 −1]
1
−1
0
0
2
3
1
0 −1
0
0 0
0
0
𝐻4 = [0
0
𝐴
0
0
𝑥1
𝑥3
𝐵
0 ] ; 𝑋1 = [ 𝑥9 ] ; 𝑋2 = [𝑥5 ]
𝑥11
𝑥7
0
Находим определитель:
19
−1 0
0
det 𝐻2 = | 1 −1 0 | = −1 + 0 + 0 − 0 − 0 − 0 = −1
1
0 −1
т.е. 𝑑𝑒𝑡𝐻2 ≠ 0
Это условие позволяет воспользоваться уравнением (1.16) для решения
(1.18), находим
0 𝐴
𝐻4 ∙ 𝐻2−1 = [0 0
0 0
𝐵
0 ] × [𝐻2−1 ]
0
Для вычисления обратной матицы 𝐻2−1 воспользуемся формулой
Крамера.
Вначале определяем транспонированную матрицу
−1 1
1
̃2 = [ 0 −1 0 ]
𝐻
0
0 −1
̃2 определителем, полученным при
Заменим каждый элемент матрицы 𝐻
вычеркивании соответствующей строчки и столбца
1 0 0
[−1 1 0]
−1 0 1
Переменим знаки у элементов с нечетной суммой индексов
1 0 0
[ 1 1 0]
−1 0 1
и каждый элемент разделим на определитель ∆𝐻2 = 1 Находим
−1 0
0
𝐻2−1 = [−1 −1 0 ]
1
0 −1
Отсюда получим
𝐻4 𝐻2−1 𝐻1
0
= [0
0
𝐴
0
0
𝐵 −1 0
0 𝑊1
0 ] [−1 −1 0 ] [ 0
0 1
0 −1 0
20
0
0
0
𝑊3
0 ]=
0
−(𝐴 − 𝐵) −𝐴
=[
0
0
0
0
−𝐵 𝑊1
0 ][ 0
0
0
0
0
0
𝑊3
−(𝐴 − 𝐵)𝑊1
0 ]=[
0
0
0
0 −(𝐴 + 𝐵)𝑊3
]
0
0
0
0
0 −1 0
−(𝐴 − 𝐵)𝑊1
= [0 𝑊0 −1] − [
0
0 0
0
0
0 −(𝐴 + 𝐵)𝑊3
]
0
0
0
0
В результате получим:
′
𝐻 = 𝐻3 − 𝐻4 ∙
𝐻2−1 𝐻1
Тогда
′
𝐻 ∙ 𝑋вх1
−1 (𝐴 + 𝐵) ∙ 𝑊3 𝑥1,
] [ 𝑥9 ]
𝑊0
−1
𝑥11
0
0
(𝐴 − 𝐵)𝑊1
=[
0
0
Уравнение системы пониженной размерности матрицы имеет вид:
′
𝐻 ∙ 𝑋вх1
(𝐴 − 𝐵)𝑊1
=[
0
0
−1 (𝐴 + 𝐵)𝑊3 𝑥1
] [ 𝑥9 ] = 0 ,
𝑊0
−1
𝑥11
0
0
(1.19)
которое позволяет проводить исследование системы при значительно
меньшем количестве переменных состояний системы.
Система однородных уравнений ΗΧ = 0 позволяет сделать
следующий вывод, который ляжет в основу дальнейших исследований.
Пусть имеем произведение ΗΧ = 0 двух квадратичных матриц
порядка 𝓃, имеющих соответственно ранги 𝑟1 и 𝑟2 . Если матрицы
прямоугольные или даже отдельные строки и столбцы, то их можно
достроить до квадратных, добавляя соответственно нулевые строки или
столбцы. Ранг матрицы произведения удовлетворяет неравенствам:
𝑟 ≤ 𝑟1
𝑟 ≤ 𝑟2
𝑟1 + 𝑟2 ≤ 𝓃
(1.20)
Пусть две квадратичные матрицы H и X порядка такие, что
𝐻𝑋 = [0]
Рассмотрим матрицу X в самом общем виде:
21
(1.21)
𝑥1
𝑥
𝑋=[ 2
.
𝑥𝑛
0 0
0 0
. .
0 0
0
0
.
0
.
.
.
.
.
.
.
.
.
.
.
.
. 0
. 0
] (ранг 𝑟2 )
. .
. 0
Отсюда следует:
𝑥
∆1 = |𝑋| ≠ 0; ∆2 |
𝑥2
𝑥1
0
| = 0; ∆3 = |𝑥2
0
𝑥3
0 0
0 0| = 0 и т.д.,
0 0
т.е. ранг матрицы [Х] 𝑟2 = 1 из условия, что 𝑟 ≤ 𝑟2 следует, что всегда 𝑟 ≤
1. Тогда из неравенства (1.20) условие ранга 𝑟1 матрицы Н существует в
границе 𝑟1 ≤ 𝑛 − 𝑟2 или 𝑟1 ≤ 𝑛 − 1, т.е. ранг матрицы Н может существовать
в границах
1 ≤ 𝑟 ≤ 𝑛 − 1.
(1.22)
Это неравенство позволяет установить границу существования миноров
матрицы Н, т.е.
∆𝑖 𝐻 = 0
𝑖 ≤ 2,3, … , 𝑛 − 1
(1.23)
Соотношение (1.23) можно использовать при исследовании системы
управления.
Минор n-го порядка находим с помощью элементов произвольной
строки или столбца:
𝑛
(𝑖 = 2,3, … , 𝑛 − 1),
∆𝑖 = ∑ 𝛼𝑠𝑖 ∆𝑠𝑖
𝑠=𝑖
где ∆𝑠𝑖 − алгебраическое дополнение элемента 𝛼𝑠𝑖 .
Из уравнения системы (например (1.19) находим миноры ∆𝑖 порядка
𝑖 = 2,3, … , 𝑛 − 1 и приравниваем их нулю. Из полученных соотношений
находим структуру звеньев отдельных компонент системы как функцию от
известных компонент. Из уравнения (1.19) компануем минор
−1 (𝐴 + 𝐵)𝑊3
∆2 = |
|=0
𝑊0
−1
Следовательно, 1 − 𝑊0 ∙ (𝐴 + 𝐵)𝑊3 = 0 так как (𝐴 + 𝐵) = 𝑊2 , то 1 − 𝑊0 ∙ 𝑊2 ∙ 𝑊3 = 0
22
Отсюда
𝑊3 =
1
𝑊0 ∙ 𝑊2
Из матричного уравнения (1.19) записываем систему уравнений
(𝐴 − 𝐵)𝑊1 𝑥1 − 𝑥9 + (𝐴 + 𝐵)𝑊3 𝑥11 = 0
𝑊0 𝑥9 − 𝑥11 = 0
Отсюда
𝑥9 =
𝐴𝑊1 𝑥1 − 𝐵𝑊1 𝑥1 −
𝑥11
𝑊0
𝑥11
+ 𝑊2 ∙ 𝑊3 𝑥11 = 0
𝑊0
Т.к.
𝐴=𝐵=
получим
−
𝑊2
2
𝑥11
+ 𝑊2 𝑊3 𝑥11 = 0
𝑊0
𝑥11
= 𝑊2 𝑊3 𝑥11
𝑊0
т.е.
1
= 𝑊2 𝑊3
𝑊0
Отсюда находим, что
𝑊3 =
1
,
𝑊0 𝑊2
что соответствует значению 𝑊3 , найденному из условия существования
минора ∆2 = 0.
1.2.2. Порядок выполнения работы
В общем виде структурная схема регулятора системы представлена
на рис.1.13 Априорно известны компоненты системы регулирования:
А,С,L,Е, К,Р. а также требования к регулятору, который должен
удовлетворять условию WT
23
N
A
B
C
D
E
K
M
P
L
Рис. 1.13 Структурная схема регулятора
N
x22
x21
D2
x9
1
x1
A x2 1 x3
B x4
1
x5
C x6 1 x7
x10
D1 x8 1 x11
x16
E x12 1 x13
K x14 1 x13
x15
M
x18
x17
P
x19
x20
L
Рис 1.14 С-граф регулятора
Необходимо найти параметры компонент: N, B, D, M.
По структурной схеме системы (рис.1.13) строим С-граф,
представленный на рис.1.14 Поскольку нам необходимо определить четыре
компоненты, а граф имеет только три узла первого рода, то произведем
структурное преобразование над известной компонентой D и представим, ее
как
𝐷1 = 𝐷2 =
𝐷
2
(1.22)
На основе С-графа строим матрицу компонент (1.22) и матрицу
структуры (1.23).
24
𝑥1
1
𝑥2
𝐴
𝑥3
0
𝑥4
0
𝑥5
0
𝑥6
0
𝑥7
0
𝑥8
0
𝑥9
0
𝑥10
0
𝑥11
0
𝑥12 = 0
𝑥13
0
𝑥14
0
𝑥15
0
𝑥16
0
𝑥17
0
𝑥18
0
𝑥19
0
𝑥20
0
𝑥21
0
𝑥22
0
[𝑥23 ] [ 0
0
0
1
𝐵
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
𝐶
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
𝐷1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
𝐷2
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
𝐸
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
𝐾
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
𝑀
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
𝑃
0
0
0
0
0
0 0
0 0
0 0
0 0
0 0
0 0
0 0
0 0
0 0
0 0
0 0
0 0
0 0
0 0
0 0
0 0
0 0
0 0
1 0
𝐿 0
0 1
0 𝑁
0 0
25
0
0
0
0
0
0
𝑥1
0
𝑥3
0
𝑥5
0
𝑥7
0
𝑥9
0 𝑥
11
0 ∙ 𝑥
13
0 𝑥
15
0 𝑥
17
0 𝑥
19
0 𝑥
21
0 [𝑥 ]
23
0
0
0
0
0
1]
(1.22)
0
0
0
0
0
0
0
0
0
0
[0
1 −1 0 0 0 0
0 1 −1 0 0 0
0 0
0 1 −1 0
0 0
0 0 0 1
0 0
0 0 0 0
0 0
0 0 0 0
0 0
0 0 0 0
0 0
0 0 0 0
0 0
0 0 0 0
0 0
0 0 0 0
0 0
0 0 0 0
0 0 0
0 0 0
0 0 0
0 −1 0
1 0 1
0 0 0
0 0 0
0 0 0
0 0 0
0 0 0
0 0 0
0
0
0
0
−1
0
0
0
0
0
0
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
1 −1 0 0
1 0 0 −1
0 0 1 0
0 0 1 0
0 0 1 0
0 0 1 0
0 0 0 0 1 0
0 0 0 0 0 0
1 0 1 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 −1
0 −1 0 0 0 0
0 0 0 −1 0 0
0 0 0 0 0 0
𝑥1
0 0
𝑥3
1 0
𝑥5
0 0
𝑥7
0 0
𝑥9
0 0
𝑥11
0 0 ∙ 𝑥 = 0 (1.23)
13
0 0
𝑥15
0 0
𝑥17
0 0
𝑥19
0 0
𝑥21
0 −1] [𝑥 ]
Перемножим (1.22) и (1.23) и получим систему однородных уравнений (1.24).
1
2
3
4
5
6
7
8
9
10 11 12
𝑥1
1
𝐴 −1 0
0
0
0
0
0
0
0 0 0
𝑥3
2
0 𝐵 −1 0
0
0
0
0
0
0 𝑁 0
𝑥5
3
0 0
𝐶 −1 0
0
0
0
0
0 0 0
𝑥7
4
0 0
0
1 −1 0
0
0
0
0 0 0
𝑥9
0 0
0 𝐷1
0
0
0
0 0 0
5
2 −1
𝑥11
6
0 0
0
0
0
𝐸 −1 0
0
0 0 0 ∙ 𝑥 =0
13
7
0 0
0
0
0
𝐸
0 −1 0
0 0 0
𝑥15
8
0 0
0
0
0
0
𝐾
0
0
0 0 0
𝑥17
9
0 0
0
0
0
0
𝐾
0 −1 0 0 0
𝑥19
10
0 0
0
0
0
0
𝐾
0
0 −1 0 0
𝑥21
11 [ 0 0
0
0
0
0
𝐾
0
0
0 0 −1] [𝑥 ]
23
26
23
(1.24)
Уравнение системы запишем в матричном виде (1.24), а затем представим ее
вfвидеfсистемыfоднородныхfуравненийf(1.25).
Ax1 − x3 + Lx19 = 0
Bx3 − x5 + Nx21 = 0
Cx7 − x7 + Mx15 + Px17 = 0
x7 − x9 = 0
D1 x7 + 2x9 − x11 = 0
Ex11 − x13 = 0
(1.25)
Ex11 − x15 = 0
Kx13 − x17 = 0
Kx13 − x21 = 0
Kx13 − x19 = 0
Kx13 − x23 = 0
}
Для исследования уравнения (1.24) произведем понижение порядка
матрицы в уравнении (1.24) с помощью формулы Гаусса. С этой целью
произведем перестановку столбцов и строк в матрице и разобьем ее на
подматрицы.
Hkk
1
1
Hkk 2
3
4
H1k 5
6
7
8
9
Hjk
10
11
6
7
𝐴 −1 0
0 𝐵 −1
0 0 𝐶
0 0
0 0
1 0
0
0
0
0
0
0
0 0
0 0
0 0
0
0
0
1 −1 0 0
1 2 −1 0
0 0 𝐸 −1
0
0
0
0
0
0
0
0
0
0
где
0
0
0
0
0
3
4
Hkj
5
0
0
0
0
[0
2
Hkj
Hjk
0
0
0
0
0
𝐸
0
0
0
0
0
𝐾
𝐾
𝐾
𝐾
8
9
10 11 12
0 0
0 0
𝑀 𝑃
𝐿 0
0 𝑁
0 0
0
0
0
𝑥1
𝑥3
𝑥5
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
𝑥7
x1
𝑥9
𝑥11 = 0,
−1
0
0
0
0
0
−1
0
0
0
0
0
−1
0
0
0
0
0
−1
0
Hj1
0 𝑥13
0 𝑥21
0 𝑥17
0 𝑥19
−1] [𝑥23 ]
xk
xj
Hjj
det Hjj = −1 = 0
Hjj−1 = −[−1]
из (1.26) находим
′
Hkk
= Hkk −
Hkj Hjj−1 Hjk
27
A −1 0
= [0 B −1]
0 0
C
(1.26)
0
′
Hki
= Hki − Hkj Hjj−1 Hji = [ 0
−1
0 0 LK
0 0 NK]
0 ME NK
′
Hik
= Hik − Hij Hjj−1 Hjk = [0]
Hii′
= Hii −
Hi jHjj−1 Hji
1
= [D1
0
−1 0
D2 −1
0
E
0
0]
−1
′
По формуле H1г
= H1г − H1j Hjj−1 H1г
получим преобразованное из (1.26) матричное уравнение (1.27):
1
1 A
2 0
3 0
4 0
5 0
6 [0
2
3
4
5
6
7
x1
−1 0
0
0
0
K
x3
B −1 0
0
0
K
x5
0
C −1 0 ME PK
∙ x7 = 0
0
0
1 −1 0
0
x9
0
0
1
2 −1 0
x11
0
0
0
0
E −1] [x ]
(1.27)
13
С целью преобразования матричного уравнения (1.27) к виду
H ′ X = [H3 − H4 H2−1 H1 ] ∙ [X1 ] = 0
разобьем матрицу (1.27) на подматрицы и произведем перестановки столбцов
и строк:
H1
1
2
3
4
H2
1
2
A
0
0
0
0
0
0
0
ME −1
0
1
5 0
6 [0
−1
E
3
1
0
4
5
6
−1 0
B
0
0
0
0 −1
0
0
0
−1
C
0
2
0
0
0
H3
7
x1 x
K x5 1
K x7
PK x11
=0
0
x9
0 x
3
−1] [x ]
13
H4
H2 = [
0 LK
]
−1 NK
det H2 = LK ≠ 0
28
x1
(1.28)
N/K −1
H2−1 = [
]
1/LK 0
H4 H2−1 = [
(CN + P)/L −C
C PK N/L −1
][
]=[
]
−1/LK
0
0 −1 1/LK 0
Отсюда находим
CN + P) A/L (−(CN + P)/L − CB
H4 H2−1 H1 = [
]
−A/LK
1/LK
Тогда: H1 = [H3 − H4 H2−1 H1 ] =
(ME − (CN + P)A/L) ((CN + P)/L + CB − 1) 0
A/LK
(1 − 1/LK
−1]
=[
−1
D1
D2
E
0
0
(1.29)
Из записи уравнений (1.28) и (1.29) следует, что минор матрицы в
уравнении (1.28) |H2|≠0. Тогда на основании миноров можем найти
неизвестные нам компоненты (операторы). Так, из уравнения (1.27) находим:
A
∆3 = [ 0
0
0
K
−1 K ] = APK − ACK = 0; P + CN = 0,
C PK
Отсюда
P
N=− .
C
Из уравнения (1.29) получим
AD2
A/LK −1
∆2 = [
− 1 = 0.
]=
−1
D2
LK
Отсюда 2D2 =
2LK
2LK
= D; D =
A
A
(CB + (CN + P)/L − 1 0
∆2 = [
] = (1 − (CN + P)/L − CB) = 0
(1 − 1/LK)
−1
Находим 𝐵 =
1
𝐶
Из системы (1.25) можем определить M:
29
x5 =
x7 − Mx15 − Px1 7
Ax23
Mx23 Px23 Px23
=
−
−
−
;
C
2LK 2 EC
KC
KC
C
x3 =
x5 − Nx23
Ax23
Mx23 Px23 Nx23
=
−
−
−
;
B
2LK 2 ECB KCB
CB
B
Ax1 =
Отсюда M = − (AK
Так как
x1
x23
Ax23
Mx23 Px23 Nx23
−
−
−
+ Lx23 = 0.
2LK 2 ECB KCB
CB
B
x1
x23
+ LK −
A
2ELK
).
−1
= W−1
T , то получим M = − (AK ∙ WT + LK −
A
)
2ELK
Таким образом, определены четыре неизвестных оператора: B, D, N, M.
Полученные результаты проверим, используя формулу Мэзона:
ABCDEK
==
1 − (DEM + DEKP + CDEKN + BCDEKL)
ABCDEK
=
==
1 − (M + KP + CNK + BCKL)
1
2LK
A∙ ∙C∙
∙E∙K
C
A
=
==
2LK ∙ E
+A
P
1
−1
1−
∙ WT − LK +
+ KP + CK (− ) + CLK)
A (−AK
2LKE
C
C
(2LEK)K
(2LEK ∙ K
=
=
= WT−1
−1 (2LEK)
2LEK
1
(−K
1
−
∙
W
∙
+1)
T
1−
[A ∙ (−K ∙ WT−1 +
A
2LEK)]
Wрасч. =
Результаты проверки свидетельствуют, что найденные параметры
четырех неизвестных операторов удовлетворяют заданным требованиям к
проектируемой системе.
1.2.3 Задание.
Аналитически
определены
компонент системы: N = −
−
математические
модели
неизвестных
P
2LK
1
;
D=
;
B = ; M = (A ∙ K ∙ WT−1 + LK −
C
A
C
A
)
2LFK.
Известны параметры следующих компонент
30
A = K1 = 2; L = K 2 = 0,5; E =
K3
0,2
K 4 1,5
=
; P=
=
;
T3 + 1 0,1 ∙ S + 1
S
S
а также известны варианты компонент системы, заданные в таблице 2
Таблица 2 Параметры компонент системы
Варианты
Системы и компоненты
1
2
5
WT = K 5
K6
2S
T6 ∙ S + 1
0,01 ∙ S + 1
K7
5
C=
S
S
Необходимо определить:
3
10
14
5
0,02 ∙ S + 1
2
S2
1. Параметры передаточных
компонент:: N, B, D, M.
18
5
(0,1 ∙ S + 1)S′
15
S
функций
4
неизвест
10
0,2 ∙ S + 1
10
S
неизвестных
2. Произвести декомпозицию передаточных функций D и M на звенья
1-го порядка
3. Произвести
функций D и M.
коррекцию динамических
свойств передаточных
4. Методом имитационного моделирования исследовать устойчивость
скорректированных звеньев D и M.
Исследования по пунктам 2, 3, 4 провести по методике, изложенной в
главе 1, п 1.4.
1.2.4. Контрольные вопросы.
1. Описать критерии исследования устойчивости систем.
2. Описать способы коррекции динамических свойств систем управления.
1.3. Исследование многомерных объектов управления.
Цель работы. Изучить методику исследования взаимного влияния
отдельных координат объекта на качество управления и найти допустимый
диапазон параметров отдельных координат управления.
31
1.3.1. Методика выполнения работы.
В теории управления широкий класс охватывают многомерные
объекты, синтез которых представляет значительные трудности.
Многомерность объекта характеризуется тонкой и глубокой
функциональной зависимостью между отдельными фазовыми координатами.
Проектирование таких систем не может быть достигнута простой
комбинацией исходных структурных элементов. Их взаимное объединение
предопределяет необходимость проведения мероприятий, которые
обеспечивают создание сложной системы.
Пусть дана двумерная система, структурный С-граф которой
представлен на рис 1.13, где 𝑥𝑖 (𝑖 = 1 ÷ 10) – переменные фазовые
координаты, а K, M, D – операторы системы. Причем K – известная
величина, а M=D1+C (D1=С) необходимо спроектировать и установить между
фазовыми координатами определенные связи.
1
x1
K
x2
1
x9 1
x6
D1
1
1
x8
x7
x4
x3
C
x5
x10
M
1
Рис. 1.13 С-граф двумерной системы.
1
x1
K
x2
1
x3 M x4
x5
x6
x7
1
E
x8
x11 1
1 x12
x9
D
1
x10
W3
1
Рис. 1.1.4 С-граф трехмерной системы.
Прежде всего на С-графе выделяем структурные элемены и узлы 1-го и 2-го
родов. Зависимость между входными и выходными переменными
выражается уравнением компонент
𝑋 = 𝐵 ∙ 𝑋вх ,
32
а функциональная связь между элементами структуры – в виде матрицы
структуры
𝐴∙𝑋 =0
Матричное уравнение системы записывается в виде
𝐴 ∙ 𝐵 ∙ 𝑋вх = 0 .
Используя указанную методику для графа на рис. 1.13, запишем
уравнение компонент
𝑥1
1
𝑥2
𝐾
𝑥3
0
𝑥4
0
𝑥5
0
=
𝑥6
0
𝑥7
0
𝑥8
0
𝑥9
0
[𝑥10 ] [ 0
0
0
1
𝑀
0
0
0
0
0
0
0
0
0
0
1
𝐶
0
0
0
0
0
0
0
0
0
0
1
𝐷1
0
0
0
0
0
0
0
0
0
0
1
0
0
0
𝑥1
0
𝑥3
0
𝑥5
0
∙ 𝑥
0
7
𝑥9
0
0 [𝑥10 ]
0
1]
уравнение структуры
0
0
[
0
0
1
0
0
0
0
0
0
0
1 0
0 −1
0 0
0 0
0 0 0
0 0 0
0 −1 0
0 0 1
𝑥1
𝑥2
𝑥3
𝑥4
−1 0
𝑥5
1
0
]∙ 𝑥 =0
1
0
6
𝑥7
0 −1
𝑥8
𝑥9
[𝑥10 ]
Перемножив матрицы, получим уравнение системы:
𝐾
0
[
0
0
𝑀
0
0
0
0
−1
0
𝐶
𝑥1
𝑥3
0 −1 0
𝑥5
0
1
0
]∙ 𝑥 =0
−1 1
0
7
𝑥9
𝐷1
0 −1
[𝑥10 ]
33
(1.30)
Уравнение системы (1.30) представляет разреженную матрицу, поэтому
для исследования системы произведем преобразование
𝐻′ = 𝐻3 − 𝐻4 ∙ 𝐻2−1 ∙ 𝐻1
С этой целью произведем перестановку столбцов и строк и выделим
подматрицы:
H1
𝐾
0
0
[0
0
0
H2
0
−1
0
−1
0
𝐶
0
0
−1
1
−1
𝐷1
1
0
H4
H3
𝑥1
𝑀 𝑥10 x
1
𝑥5
0
∙ 𝑥7 = 0
0
0 ] 𝑥9 x1
[ 𝑥3 ]
(1.31)
где
det 𝐻2 = −𝑀 ≠ 0
0
𝐻2−1 = 1
−
[𝑀
0
0
1 ; 𝐻4 ∙ 𝐻2−1 = [ 1
−
0
𝑀]
𝐻4 ∙ 𝐻2−1 ∙ 𝐻1 = [ 0
0
0]∙ 1
−
0
[𝑀
1 ] ∙ [𝐾
0
0
𝐻′ = 𝐻3 − 𝐻4 ∙ 𝐻2−1 ∙ 𝐻1 = [ 1
0
−1
0
0
1 =[
−
0
𝑀]
0 ] = [0
−1
0
0
𝐶
0
−1]
0
𝐷
1]
0
−1]
0
(1.32)
Исследуем миноры матрицы
1 −1
∆2 = [
] = 𝐷1 − 1 = 0
−1 𝐷1
Отсюда следует 𝐷1 = 1, а 𝐷1 = С = 1, тогда
𝐷 = 𝐷1 + 𝐶 = 2
34
(1.33)
Поскольку порядок матрицы (1.30) невысок, то с целью наглядности
представим в виде системы уравнений:
𝐾𝑥1 + 𝑀𝑥3 − 𝑥9 = 0
−𝑥5 + 𝑥9 = 0
}
−𝑥7 + 𝑥9 = 0
−𝑥10 + 𝐷1 𝑥7 + 𝐶𝑥5 = 0
В эту систему подставим значение (1.33) и получим
𝐾𝑥1 + 𝑀𝑥3 −
𝑥10
=0.
2
Отсюда
𝑀=
Таким
операторам:
образом,
𝑥10 𝐾𝑥1
−
2𝑥3
𝑥3
определены
требования
к
двум
𝑥10
𝑥1
−𝐾
2𝑥3
𝑥3 }
𝐷=2
неизвестным
(1.34)
Условием существования системы будет 𝑀 ≥ 0, т. е.
𝐾≤
𝑥10
2𝑥1
Таким образом, при 𝑊𝐷 = 2 должно выполняться условие
𝑀=
1 𝑋10
− 𝐾𝑋1 )
(
𝑋3 2
𝑋10
𝐾≤
2𝑋1
}
(1.35)
Для исследования трехмерной системы запишем уравнение для
С-графа, представленного на рис. 1.14, где необходимо обосновать
требования к W3 и к W4=D+E (D=E)
Уравнение системы будет:
35
𝐾
0
[
0
0
𝑀
0
0
0
𝐶
0
0
0
0
0
−1 0
0 −1
𝐸
𝐷
𝑥1
𝑥3
−1 0
𝑥5
1
0
] ∙ 𝑥7 = 0
1
0
𝑥9
0 −1 𝑥
11
[𝑥12 ]
H
(1.36)
X
Произведем перестановку столбцов в H и строк в X и разделим на
подматрицы:
H1
H2
𝑥1
X2
𝑥3
𝐾 𝑀 0 𝐶 0
0 −1 𝑥
12
0 0
0 0 0 −1 1
[
] ∙ 𝑥5 = 0
0 0
0 0 −1 0
1
𝑥9
0 0 −1 0 𝐷
𝐸
0
𝑥7
X4
[𝑥11 ]
H3
H4
Находим
𝐾
(𝑀 − 1)
𝐶
𝐻′ = 𝐻3 − 𝐻4 ∙ 𝐻2−1 ∙ 𝐻1 = [
]
(𝐾𝐸 − 1) (𝑀𝐸 + 𝐷) 𝐸𝐶
для H` исследуем минор
∆2 = |
𝐾
(𝑀 − 1)
𝐶
| = 𝐾(𝑀𝐸 + 𝐷) − (𝑀 − 1)(𝐾𝐸 − 1) = 0
(𝐾𝐸 − 1) (𝑀𝐸 + 𝐷) 𝐸𝐶
и находим
𝐾(𝐷 + 𝐸) = 1 − 𝑀; 𝐷1 + 𝐸 = 𝑊4 =
1−𝑀
𝐾
(1.37)
С учетом уравнения (1.36) решаем систему:
𝐾𝑥1 + 𝑀𝑥3 + 𝐶𝑥5 − 𝑥11 = 0
−𝑥7 + 𝑥11 = 0
}
−𝑥9 + 𝑥11 = 0
𝐸𝑥1 + 𝐷𝑥3 + 𝑥12 = 0
и находим
𝐾𝑥12
− 𝐾𝑥1 − 𝑀𝑥3
𝐶 = 𝑊3 = 1 − 𝑀
𝑥5
36
(1.38)
Таким образом, неизвестные операторы равны:
𝑊3 =
𝐾
𝑥12
𝑥1
𝑥3
∙
−𝐾 −𝑀
1 − 𝑀 𝑥5
𝑥5
𝑥5
1−𝑀
𝑊4 =
𝐾 }
(1.39)
Условием решения системы (1.39) будет
1−𝑀 ≥0
𝐾
𝑥12
𝑥1
𝑥3
∙
− 𝐾 − 𝑀 ≥ 0}
1 − 𝑀 𝑥5
𝑥5
𝑥5
т.е.
𝑀≤1
𝐾
𝑥12
𝑥1
𝑥3
∙
−𝐾 ≥𝑀 }
1 − 𝑀 𝑥5
𝑥5
𝑥5
(1.40)
Результаты исследований двумерной и трехмерной систем
свидетельствуют о глубокой параметрической связности отдельных
координат, что влечет за собой проведение системных исследований.
1.3.2 Порядок выполнения работы.
Провести исследование областей существования решения для двумерной и
трехмерной систем управления при заданных входных и выходных
параметрах управления:
𝑥1 = 𝑎1 (1 − 𝑒
𝑡
−
𝑇1 )
𝑥3 = 𝑎3 (1 − 𝑒
𝑡
−
𝑇2 )
𝑥5 = 𝑎5 (1 − 𝑒
𝑡
−
𝑇5 )
𝑥10 = 𝑎10 (1 − 𝑒
𝑥12 = 𝑎12 (1 −
,
(1.41)
𝑡
−
𝑇10 )
𝑡
−
𝑇
𝑒 12 )
}
где 𝑥𝑖 – законы управления и исполнения на входе и выходе системы, 𝑎𝑖 –
амплитуды, 𝑇2 – постоянные времени операторов системы; t – время. Законы
экспоненциального воздействия (рис.1.15)
37
xвых
xвх
xвых
t
ai
0
1
T
2
C
3
Рис.1.15 График переменных состояний системы.
Исходные данные параметров состояний системы управления представлены
в Таблице 3.
Таблица 3.
Исходные данные параметров состояний системы.
Варианты
1
2
3
4
5
2
3
4
7
15
0,2
0,1
0,3
0,4
0,7
4
5
6
12
20
0,3
0,2
0,4
0,5
1,2
6
7
8
15
25
0,4
0,3
0,6
0,6
1,5
8
9
10
20
34
0,5
0,4
0,7
0,7
2,0
10
11
7
25
36
0,6
0,5
0,8
0,8
2,1
Параметры
a1
a3
a5
a10
a12
T1
T3
T5
T10
T12
На вход систем подаются одновременно экспоненциальные воздействия 𝑥𝑖 =
𝑎𝑖 ∙ (1 − 𝑒
𝑡
𝑇1
−
) Интервал исследования выбирается равным для двумерной
системы 𝑡𝑖 = 3𝑇10 , для 3хмерной 𝑡𝑖 = 3𝑇12 в зависимости от варианта
задания. Количество точек выбираем для каждого варианта с шагом ∆𝑡𝑖 =
3𝑇10
𝑇𝑖мин
3
=
9𝑇10
𝑇𝑖мин
–для двумерной системы и ∆𝑡𝑖 =
3𝑇12
𝑇𝑖мин
3
=
9𝑇12
𝑇𝑖мин
– для трехмерной
системы.
Результаты исследований выполнить для двумерной системы по
формуле (1.36), для трехмерной по (1.39) и свести в таблицы.
38
Таблица 4.
t
x1
x3
x10
M
K
0
0
0
0
0
0
Результаты расчета двумерной системы (∆𝑡𝑖 =
0,1
Таблица 5.
t
x1
x3
M
K
x5
x12
W3
W4
0
0,2
0,3
0,4
. . . .
0,2
0,3
0,4
𝑇𝑖мин
)
tn=3T10
Результаты расчета трехмерной системы (∆𝑡𝑖 =
0,1
9𝑇10
. . . .
9𝑇12
𝑇𝑖мин
)
tn=3T12
1.3.3. Задание
По результатам эксперимента построить графики в соответствии с данными
Таблиц 4 и 5.
1. Для двумерной системы построить графики изменения функций K, M, X10
в интервале от нуля до установшегося режима (рис.1.16)
K,M x10
x10
x10
Kу
K
K0 M0
Mу
M
t
0
2
3
t0
t
Рис 1.16 Определение параметров функций двумерной системы.
1
39
2. Определить параметры функций K и M в установившемся режиме
(стационарный процесс).
3. Определить значение функции в режиме многомерных однотипных систем
управления (МОСАУ) (в точке t0.)
Найти величину (
𝐾у −𝐾0
𝐾у
) ∙ 100% и (
𝑀у −𝑀0
𝑀у
) ∙ 100%
4. Для трехмерной системы в соответствии с данными Таблицы 4 построить
графики функций 𝑊3 , 𝑊4 , 𝑥12 (рис.1.17)
W3 x12
W4 x12
W3
x12
W3
W4
W4
t
1
t1
2
t1
3
Рис.1.17. Определение параметров функций 𝑊3 и 𝑊4 трехмерной системы
управления.
5. Определить параметры функций 𝑊3 и 𝑊4 в стационарном режиме (точка
t1)
6. Определить параметры третьей координаты 𝑊3 и сравнить со значением K,
M двумерной системы. в точках t0 рис.116 и рис 1.1.7
7. Определить значение 𝑊4 при t0 (t0=t0 на рис 1.16)
1.3.4. Контрольные вопросы
1. Каким способом можно уменьшить величины отклонений параметров K и
M от величины K0
2. Причина значительной разницы параметров D и 𝑊4 в двумерной системе и
трехмерной.
40
3. В чем причина связности объекта?
4. Какие параметры можно менять в многомерном объекте?
5. Определить границы существования оптимальных областей решения.
1.4. Декомпозиция компонент структуры системы с помощью
цепных дробей.
Цель работы. Изучить методику декомпозиции структуры системы,
заданной в виде дробно-рациональной функции высокого порядка.
1.4.1. Методика декомпозиции структуры с помощью цепных дробей
В результате синтеза САУ возникает задача о реализации полученных
компонент структуры. Передаточная функция компонент получается в виде
дробно-рациональной функции достаточно высокого порядка. Реализация
техническими средствами такой функции вызывает большие, часто
неоправданные трудности. Естественно стремление представить дробнорациональную функцию с помощью определенной структуры элементарных
или простых звеньев.
В абстрактном виде постановку задачи можно сформулировать так.
Задано множество дробно-рациональных функций 𝑀в . На множестве заданы
операции:
-сложение: a=b+c;
-умножение: a=b×c;
-деление: a=b/c.
Введем операцию «обратная связь», обозначаемую символом 0 , и
определим ее следующим образом: 𝑎 = 𝑏 ∘ 𝑐 = 𝑏/(1 + 𝑏𝑐).
Из определения вытекают следующие свойства операции:
𝑏 ∘ 𝑐 ≠ 𝑐 ∘ 𝑏;
(𝑏 ∘ 𝑐) ∘ 𝑑 ≠ 𝑏 ∘ (𝑐 ∘ 𝑑);
𝑏 ∘ 𝑐) ∘ 𝑑 ≠ 𝑏 ∘ (𝑐 + 𝑑),
где c, a, b, d – дробно-рациональные функции.
41
Известны разложения любой дробно-рациональной функции 𝑊 =
𝑄𝑚
𝑅𝑛
на сумму и произведение элементарных дробей:
𝑛
𝑄𝑚
𝑄𝑖0
= ∑ ′ ; 𝑚 ≤ 𝑛;
𝑅𝑛
𝑅𝑖
(1.42)
𝑖=1
m
n
𝑄𝑗0
𝑄𝑚
𝑄𝑖′
= (∏ ′ ) ∙ ( ∏ ′ ) ; 𝑚 ≤ 𝑛;
𝑅𝑛
𝑅𝑖
𝑅𝑗
i=1
(1.43)
j=m+1
n
m
𝑄𝑚
𝑄𝑖′
= (∏ ′ ) ( ∏ 𝑄𝑗′ ) ; 𝑚 ≥ 𝑛,
𝑛
𝑅
𝑅𝑖
i=1
(1.44)
j=n+1
где: 𝑄𝑚 – числитель дробно-рациональной функции от переменной S степени
m; 𝑅𝑛 – знаменатель дробно-рациональной функции от переменной S степени
n.
Известно также разложение дробно-рациональной функции в цепную
дробь. По определению, простейшей цепной дробью называется выражение
вида:
𝑎0 +
1
1
𝑎1 +
𝑎2 + ⋯
,
где 𝑎0 , 𝑎1 , 𝑎2 , … .. при общем подходе функции одной или нескольких
переменных.
Существует множество алгоритмов разложения дробно-рациональной
функции в цепную дробь [80]. Воспользуемся алгоритмом, заключающемся в
следующем. Дробно-рациональная функция 𝑊 =
𝑄𝑚
1
1
=
=
,
𝑅𝑛
𝑄𝑚−1
𝑅𝑛
𝑛−𝑚
+ 𝑚
𝑄𝑚 𝐴1
𝑄
𝑄𝑚
𝑅𝑛
представляется в виде
где
𝑅 𝑛 = 𝐴1𝑛−𝑚 ∙ 𝑄𝑚 + 𝑄𝑚−1
Далее для
𝑄𝑚−1
𝑄𝑚
повторяется преобразование (1.45).
42
(1.45)
Такие шаги повторяются до тех пор, пока очередной остаток от деления
знаменателя на числитель не будет иметь степень 0 для дробно-рациональной
функции:
𝑄𝑚
=
𝑅 𝑛 𝐴𝑛−𝑚 +
1
1
,
1
′
𝐴2 + ⋯
+
(1.46)
1
𝐴′𝑚 +
0
𝑄𝑚
′
𝑄𝑚−1
где 𝐴𝑖0 – частное от j-го деления полинома степени i ;
𝑄𝑗𝑖 – остаток от j-го деления полинома степени i .
При каждой операции деления показатель степени полинома уменьшается на
единицу, отсюда нетрудно видеть, что при использовании алгоритма
получаем m частных, причем первое частное имеет степень n-m , а остальная
степень I, всего же дробно-рациональная функция
𝑄𝑚
𝑅𝑛
выражается через n
дробно-рациональную функцию. Если 𝐴1𝑛−𝑚 разложить на произведение
полиномов степени I, то получим выражение
𝑄𝑚
𝑅𝑛
через n дробно-
рациональных функций. Следовательно, во всех случаях разложения
𝑄𝑚
𝑅𝑛
на
элементарные функции (1.42), (1.43), (1.46) мы получаем в разложении n
элементов.
Разложение (1.45) используется при 𝑚 ≤ 𝑛; если 𝑚 > 𝑛, тогда на
первом шаге можно воспользоваться соотношениями:
𝑄𝑚
1
1
=
=
;
𝑛
𝑅
𝑅𝑛
𝑄1′ 𝑄1𝑚−2
𝑄𝑚 𝑅 ′ + 𝑅𝑚−1
1
3
𝑚
𝑄
1
1
=
=
.
𝑛
𝑅
𝑅𝑛
𝑅𝑛
𝐴1 + ( 𝑚 − 𝐴1 ) }
𝑄𝑚
𝑄
(1.47)
Число элементов в разложении (1.47) будет равно m. В случае (1.44)
также получаем m элементов. Следовательно, при разложении в цепную
дробь получаем число элементов в разложении равное max(𝑛 ∨ 𝑚).
Разложение (1.47) невыполнимо при n<m.
43
Разложениям
(1.42)–(1.44)
соответствует
параллельное
и
последовательное соединение звеньев в структуре системы по каждому
составляющему члену этих выражений.
Покажем возможность использования аппарата цепных дробей для
отображения системы в виде структуры с использованием компоненты в
обратной связи.
Пусть дано выражение 𝑎 = 𝑏 ∘ (𝑐 ∘ (𝑑 ∘ (𝑙 ∘ 𝑘))). Выразим a через b, c,
d, l, k и операции +, ×, / . Получим:
𝑎 = 𝑏 ∘ (𝑐 ∘ (𝑑 ∘ (𝑙⁄(𝑙𝑘 + 1)))) =
= 𝑏 ∘ (𝑐 ∘ (𝑑⁄
)) =
(1 + 𝑙𝑑⁄(1 + 𝑙𝑘))
=𝑏∘ 𝑐
=
⁄((1 + 𝑐𝑑)
)
⁄ 1 + 𝑑𝑙
(
)
⁄
(1 + 𝑙𝑘) )
(
=𝑏
=
⁄
1 + 𝑏𝑐
(
=
⁄(1 + 𝑐𝑑
)
⁄(1 + 𝑑𝑙
⁄(1 + 𝑙𝑘)) )
𝑏
𝑏𝑐
1+
𝑐𝑑
1+
𝑑𝑙
1+
1 + 𝑙𝑘
=
44
1
1
1
+1
1
𝑏
+
1
𝑐 1
+1
𝑑
+𝑘
𝑙
(1.48)
b
Выражение (1.48) соответствует цепной
дроби (1.46), следовательно, разложив дробно-
c
рациональную функцию 𝑊 =
d
l
k
Рис.
1.18.
Структурная
схема,
реализующая
разложение с помощью
цепной дроби
𝑄𝑚
𝑅𝑛
, мы получим
представление ее в виде (1.48). Следует
отметить, что b, c, d, l, k любые дробнорациональные функции, т. е. любые объекты,
обладающие соответствующей передаточной
функцией, могут быть представлены в виде
многократной обратной связи.
С помощью разложения (1.46) мы всегда
можем получить звенья только 1-го порядка.
При желании в разложении (1.45) можно
получить звенья 2-го, 3-го и большего порядка.
1.4.2 Порядок выполнения работы
𝑚
Пусть
дана
передаточная
функция
𝑄
𝑊= 𝑛
𝑅
=
0.4𝑆3 +0.5𝑆2 +0.2𝑆+0.1
, где степень числителя m меньше степени
0.3𝑆4 +0.2𝑆3 +0.4𝑆2 +0.1𝑆+0.01
знаменателя n (m<n). Используя алгоритм, описанный выше, разложим
данную функцию в цепную дробь. Для этого воспользуемся формулой (1.45):
𝑄𝑚
=
𝑅𝑛 𝐴𝑛−𝑚 +
1
1
1
𝐴2 +
1
𝐴′𝑚 +
0
𝑄𝑚
′
𝑄𝑚−1
.
Тогда
𝑄𝑚
0.4𝑆 3 + 0.5𝑆 2 + 0.2𝑆 + 0.1
𝑊= 𝑛 =
==
𝑅
0.3𝑆 4 + 0.2𝑆 3 + 0.4𝑆 2 + 0.1𝑆 + 0.01
1
=
0.3𝑆 4 + 0.2𝑆 3 + 0.4𝑆 2 + 0.1𝑆 + 0.01
0.4𝑆 3 + 0.5𝑆 2 + 0.2𝑆 + 0.1
45
Деление полиномов выполнять по правилу столбика:
0.3𝑆 4 + 0.2𝑆 3 + 0.4𝑆 2 + 0.1𝑆 + 0.01 0.4𝑆 3 + 0.5𝑆 2 + 0.2𝑆 + 0.1
–
0.3𝑆 4 + 0.375𝑆 3 + 0.15𝑆 2 + 0.075𝑆 0.75𝑆 − 0.4375
−0.175𝑆 3 + 0.25𝑆 2 + 0.025𝑆 + 0.01
–
−0.175𝑆 3 − 0.21875𝑆 2 − 0.0875𝑆 − 0.04375
0.46875𝑆 2 + 0.1125𝑆 + 0.05375
Таким образом, функция W примет вид:
𝑊=
1
=
0.46875𝑆 2 − 0.1125𝑆 − 0.05375
0.75𝑆 − 0.4375 +
0.4𝑆 3 + 0.5𝑆 2 + 0.2𝑆 + 0.1
1
=
0.75𝑆 − 0.4375 +
=
1
0.4𝑆 3 + 0.5𝑆 2 + 0.2𝑆 + 0.1
0.46875𝑆 2 + 0.1125𝑆 + 0.05375
Далее повторяем деление полиномов пока максимальная степень остатка от
деления не будет иметь степень 0.
1
=
=
1
0.75𝑆 − 0.4375 +
0.853𝑆 + 0.862 +
0.054 + 0.057𝑆
0.46875𝑆 2 + 0.1125𝑆 + 0.05375
1
=
=
1
0.75𝑆 − 0.4375 +
0.853𝑆 + 0.862 +
1
+ 0.1125𝑆 + 0.05375
0.054 + 0.057𝑆
0.46875𝑆 2
1
=
=
1
0.75𝑆 − 0.4375 +
0.853𝑆 + 0.862 +
1
8.199𝑆 − 5.729 +
46
0.3612
0.054 + 0.057𝑆
1
=
=
1
0.75𝑆 − 0.4375 +
1
0.853𝑆 + 0.862 +
8.199𝑆 − 5.729 +
1
0.054 + 0.057𝑆
0.3612
В результате получаем цепную дробь:
1
𝑊=
1
0.75𝑆 − 0.4375 +
1
0.853𝑆 + 0.862 +
8.199𝑆 − 5.729 +
1
0.158𝑆 + 0.1486
В результате разложения получено 3 частных (результатов от деления)
и остаток от деления, следовательно, 𝑊 =
𝑄𝑚
𝑅𝑛
выражается через 4 дробно
рациональных функции. На рисунке 1.19 изображена структурная схема,
соответствующая выражению (1.49).
1
0.75𝑆 − 0.4375
1
0.853𝑆 + 0.862
1
8.199𝑆 − 5.729
1
0.158𝑆 + 0.1486
1
2
3
4
Рис. 1.19. Структурная схема, реализующая разложение с помощью цепной
дроби
Структурная схема содержит звенья вида:
1
8.199𝑆 − 5.729
1
0.75𝑆 − 0.4375
Рис. 1.20. Звенья с отрицательными коэффициентами
47
Такие звенья называются неминимально-фазовые, у которых хотя бы один
нуль или полюс передаточной функции имеет положительную вещественную
часть.
Следует стремиться избегать таких звеньев в структуре системы. Этого
можно достигнуть с помощью следующего преобразования:
𝑊(𝑆) =
𝑘
𝑘
1
=
=
,
𝑇𝑆 − 1 (𝑇𝑆 + 𝑎) − (1 + 𝑎) 𝑇𝑆 + 𝑎 + 1 + 𝑎
𝑘
𝑘
(1.50)
где a – положительное число. Реализация выражения (1.50) может быть
осуществлена с помощью структурной схемы, представленной на рисунке
1.21
𝑘
𝑇𝑆 + 𝑎
+
1+𝑎
𝑘
Рис. 1.21 Структурная схема, реализующая звено
Применим данный метод для функции (1.49). На рисунке 1.22 изображена
преобразованная структурная схема, где a=0.5.
1
0.75𝑆 + 0.5
+
0.94
48
1
0.853𝑆 + 0.862
Рис. 1.22 Преобразованная структурная схема
Звенья, у которых порядок полинома числителя больше порядка
полинома знаменателя, технически трудно нереализуемы. В этом случае
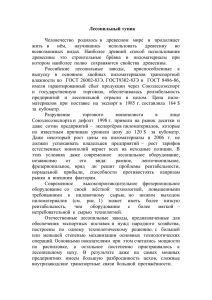
уместно произвести декомпозицию функции в цепную дробь.
Рассмотрим случай, когда m>n (m=4, n=3).
𝑄𝑚 0.3𝑆 4 + 0.2𝑆 3 + 0.4𝑆 2 + 0.1𝑆 + 0.01
𝑊= 𝑛 =
==
𝑅
0.4𝑆 3 + 0.5𝑆 2 + 0.2𝑆 + 0.1
1
=
0.4𝑆 3 + 0.5𝑆 2 + 0.2𝑆 + 0.1
0.3𝑆 4 + 0.2𝑆 3 + 0.4𝑆 2 + 0.1𝑆 + 0.01
Первое частное от деления будет иметь степень n-m, это означает, что
степень S станет отрицательной. Затем делим полиномы, как описано ранее:
–
0.4𝑆 3 + 0.5𝑆 2 + 0.2𝑆 + 0.1 0.3𝑆 4 + 0.2𝑆 3 + 0.4𝑆 2 + 0.1𝑆 + 0.01
0.4𝑆 3 + 0.267𝑆 2 + 0.533𝑆 + 0.013 +
0.233𝑆 2 − 0.333𝑆 − 0.033 −
𝑊=
0.013
0.013
𝑆
𝑆
0.013
𝑆
1
==
0.013
− 0.333𝑆 − 0.033 −
1.333
𝑆
+
4
3
2
𝑆
0.3𝑆 + 0.2𝑆 + 0.4𝑆 + 0.1𝑆 + 0.01
1
=
1.333
1
+
4
3
𝑆
0.3𝑆 + 0.2𝑆 + 0.4𝑆 2 + 0.1𝑆 + 0.01
0.013
0.233𝑆 2 − 0.333𝑆 − 0.033 −
𝑆
0.233𝑆 2
49
0.3𝑆 4 + 0.2𝑆 3 + 0.4𝑆 2 + 0.1𝑆 + 0.01 0.233𝑆 2 − 0.333𝑆 − 0.033 −
–
0.3𝑆 4 − 0.43𝑆 3 − 0.043𝑆 2 + 0.017𝑆
0.013
𝑆
1.286𝑆 2 + 2.69𝑆 + 5.75
0.629𝑆 3 + 0.44𝑆 2 + 0.117𝑆 + 0.01
–
0.629𝑆 3 − 0.898𝑆 2 − 0.09𝑆 − 0.036
1.34𝑆 2 + 0.207𝑆+0.05
1.34𝑆 2 − 1.92𝑆 −
2.12𝑆 +
𝑊(𝑆) =
0.077
𝑆
0.077
𝑆
− 0.19
+ 0.24
1
1.333
+
𝑆
1
0.077
+ 0.24
𝑆
1.29𝑆 2 + 2.69𝑆 + 5.75 +
0.013
0.233𝑆 2 − 0.333𝑆 − 0.033 − 𝑆
2.12𝑆 +
В результате получаем цепную дробь:
W(S) ==
=
1
1.333
S +
1
1
1.29S 2 + 2.69S + 5.75 +
0.12 − 0.17 +
1
−1377.525 + 165.59 +
1
−0.0150 − 0.002
В полученной дроби присутствует полином второго порядка. Значит,
задача разложения не выполнена. Полином второй степени появился
вследствие деления знаменателя исходной функции на остаток от первого
деления числителя на знаменатель. Разница их степеней равна двум,
следовательно, частное будет второго порядка. Чтобы избежать появления
полинома второго порядка, выполним первое деление другим способом:
–
0.4𝑆 3 + 0.5𝑆 2 + 0.2𝑆 + 0.1
0.3𝑆 4 + 0.2𝑆 3 + 0.4𝑆 2 + 0.1𝑆 + 0.01
0.01
0.3𝑆 3 + 0.2𝑆 2 + 0.4𝑆 + 0.1 + 𝑆
1
𝑆
0.01
0.1𝑆 3 + 0.3𝑆 2 − 0.2𝑆 − 𝑆
50
В результате деления порядок остатка остался таким же как и порядок
делимого, а разница порядков остатка и делителя равна единицы, значит, при
следующем делении получится частное первого порядка.
𝑊(𝑆) =
𝑄 𝑚 0.3𝑆 4 + 0.2𝑆 3 + 0.4𝑆 2 + 0.1𝑆 + 0.01
=
==
𝑅𝑛
0.4𝑆 3 + 0.5𝑆 2 + 0.2𝑆 + 0.1
1
=
==
3
2
0.4𝑆 + 0.5𝑆 + 0.2𝑆 + 0.1
0.3𝑆 4 + 0.2𝑆 3 + 0.4𝑆 2 + 0.1𝑆 + 0.01
1
=
==
0.01
3
2
0.1𝑆 + 0.3𝑆 − 0.2𝑆 + 𝑆
1
+
𝑆 0.3𝑆 4 + 0.2𝑆 3 + 0.4𝑆 2 + 0.1𝑆 + 0.01
1
=
=
1
1
𝑆 + 0.3𝑆 4 + 0.2𝑆 3 + 0.4𝑆 2 + 0.1𝑆 + 0.01
0.01
0.1𝑆 3 + 0.3𝑆 2 − 0.2𝑆 + 𝑆
В результате получаем цепную дробь:
𝑊(𝑆) ==
=
1
1
𝑆+
(1.51)
1
1
3𝑆 − 7 +
1
0.03𝑆 + 0.11 +
−53.54𝑆 + 24.45 +
1
1
1.97𝑆 − 0.89 + 1.97 + 0.96
При декомпозиции дробной функции в цепную дробь при каждом
делении порядок остатка уменьшается, значит, количество элементов в
цепной дроби равно порядку исходной дроби. Однако, в случае,
рассмотренном выше, при первом делении степень остатка не уменьшилась,
следовательно, количество элементов в цепной дроби увеличивается на
единицу, дополнительным ограничением на частные является то, что в них
не должно быть отрицательных степеней, а этот параметр увеличивает число
частных ещё на единицу. Таким образом, количество элементов в цепной
дроби возрастает до шести.
В дроби (1.51) присутствуют отрицательные коэффициенты (-7; -53; 0.89). На рисунке 1.23 представлена структурная схема этой цепной дроби,
где неминимально-фазовые звенья преобразованы в звенья с
положительными коэффициентами.
+
-
S
51
1
+
+
Рис 1.23. Структурная схема
1.4.3 Задание
1. Задана передаточная функция
𝑊
=
𝑄𝑚
𝑅𝑛
=
𝑎3 𝑆3 +𝑎2 𝑆2 +𝑎1 𝑆+𝑎0
𝑏4 𝑆4 +𝑏3 𝑆3 +𝑏2 𝑆2 +𝑏1 𝑆+𝑏
m<n
Исходные значения коэффициентов заданы в таблице 6
52
; где
Таблица 6 Значения коэффициентов передаточной функции.
Варианты
Коэффициенты
a3
a2
a1
a0
b4
b3
b2
b1
b0
1
2
3
4
5
0,6
0,8
0,2
0,1
0,8
1,2
1,6
0,2
0,4
0,8
0,9
0,4
0,2
1,0
1,4
1,8
0,6
0,2
0,9
1,2
0,6
0,3
1,2
1,6
2,0
0,4
0,1
1,2
1,6
1,4
0,6
1,4
1,8
2,2
1,2
1,2
1,4
1,8
1,6
0,8
1,6
2,0
2,5
1,4
1,0
2. Задана передаточная функция 𝑊
4
𝑚
= 𝑄𝑅𝑛 = 𝑎4𝑆
+𝑎3 𝑆3 +𝑎2 𝑆2 +𝑎1 𝑆+𝑎0
𝑏3 𝑆3 +𝑏2 𝑆2 +𝑏1 𝑆+𝑏
, где
m>n.
Исходные значения коэффициентов функции заданы в таблице 7
Таблица 7 Значения коэффициентов передаточной функции.
Варианты
Коэффициенты
a4
a3
a2
a1
a0
b3
b2
b1
b0
1
2
3
4
5
0,6
0,9
0,4
0,4
0,2
0,4
1,0
0,2
0,4
1,0
1,2
0,6
0,8
0,4
0,6
1,2
0,4
0,2
1,2
1,4
0,8
1,0
0,6
0,8
1,4
0,8
0,1
1,3
1,6
1,2
1,4
0,8
1,2
1,6
1,2
1,4
1,5
1,8
1,4
1,6
1,0
1,4
1,8
1,4
1,6
3. Ознакомиться с программой «Декомпозиция»
53
4. По п. 1, 2 провести декомпозицию передаточных функций
5. Выполнить коррекцию динамических свойств передаточных функций
6. Ознакомиться с методикой имитационного моделирования систем.
1.4. Контрольные вопросы.
1. Сравнить методику декомпозиции цепными дробями с другими методами.
2. Ознакомиться с другими методами коррекции динамики систем.
Глава 2. Моделирование компонент систем управления.
2.1. Электромеханический преобразователь.
Цель работы. Ознакомиться с методикой моделирования работы
гидроаппаратуры
и
произвести
выбор
конструкции
элементов
электромеханического преобразователя.
2.1.1 Методика выполнения работы
54
При использовании гидравлического двигателя, управляющего
перемещением исполнительного механизма, необходим преобразователь
электрической величины в расход жидкости. Эту функцию в системе
выполняет золотник. Исполнительная часть золотника состоит из двух узлов:
электромеханического преобразователя (ЭПМ) и гидроусилителя.
Электромеханический преобразователь (рис.2.1) представляет собой
электромагнитный элемент с вращательным движением якоря, с которым
механически связан управляющий золотник гидроусилителя.
Уравнение динамики якоря электромеханического элемента имеет вид
d 2 ρу
dρу Brя + 2cl rl2
J
q
Qrв f
∙ 2 +
∙
+
ρу +
= iу
rк rя A dt
rк rя A dt
rк rя A
rя A
, (2.1)
где J – момент инерции якоря и коромысла с укрепленными на нем деталями;
rя – радиус якоря; rк – плечо коромысла; ρу – линейное перемещение
управляющего золотника; q – коэффициент демпфирования; rв – радиус вала
якоря; f – коэффициент трения в подшипниках; Q – общий вес якоря и
коромысла; rl - расстояние от оси вращения якоря до места крепления
пружин; cl – коэффициент жесткости пружин.
Здесь
Wу Jв1 𝑙dμ0
2(Jв1 Wв1 )2 rя dμ0
A=
; B=
,
𝛿(1 + 2𝑐)
𝛿(1 + 2𝑐)
где Wу – число витков обмоток управления и возбуждения, соответственно;
Jв1 – ток в обмотке подмагничивания; μ0 – абсолютная проницаемость
воздуха; d, l, 𝛿, c – конструктивные размеры магнитопровода реле; 𝑖у – ток
управления в обмотке
1
ОУ2
4
08
08
ОУ1
1
2
55
3
Гидроусилитель
+ 4
3
Гидродвигатель
Рис.2.1. Функциональная связь электротехнического преобразователя с
исполнительными элементами
Введем следующие обозначения:
J
q
Brя + 2c1 r12
Qrв f
m=
; γ=
; β=
; α=
rк rя 𝐴
rк rя 𝐴
rк rя 𝐴
Arя
Тогда уравнение (2.1) примет вид
d2 ρу
dρу
m 2 +γ
+ βρу + α = iу
dt
dt
(2.2)
В уравнении (2.2) 𝛼 член характеризует трение в подшипниках якоря и
является малой величиной, так как ось якоря помещена в шариковых
подшипниках и работает при обильной смазке. Таким образом, движение
управляющего золотника гидроусилителя можно описать уравнением
T22
d2 ρу
dρу
+
T
+ ρу = Kiу ,
l
dt 2
dt
(2.3)
где
T22 =
m
J
γ
q
=
;
T
=
=
2ξT2 ;
l
β Brя + 2c1 r12
β Brя + 2c1 r12
K=
(2.4)
1
Arк rя
=
β Brя + 2c1 r12
Здесь ξ ≤ 0,707 – коэффициент колебательности.
Применяя преобразование Лапласа, получим передаточную функцию
электромеханического преобразователя.
W(S)ЭМ П =
K
T22 + 2ξTS + 1
56
2.1.2 Порядок выполнения работы
1. Определить параметры конструкции преобразователя: rя – радиус
якоря; q – коэффициент демпфирования; c1 – коэффициент жесткости
пружины при заданных требованиях к динамическим характеристикам
Tl , T2 , K.
Произвести решение системы уравнений (2.4), получим:
KJ
rя =
; (2.5)
AT22 rк
J − T22 Brя
cl =
(2.7)
2T22 r12
Tl J
q = 2 (2.6)
T2
При следующих исходных данных (таблица 8) рассчитать графики функций
rя = f(k) (2.5); q = f(T2 ) (2.6); c = f(T2 ) (2.7) при T1 = const для своего
варианта исследований.
Таблица 8 Данные характеристик ЭМП
Вариант
Параметр
1
2
3
4
0,01
0,02
0,03
0,04
T1
0,03
0,04
0,05
0,06
T2
K
0,4
0,5
0,6
0,7
-4
-2
-4
при J=4·10 ; B=1,8·10 ; A=6·10 ; r1=2,0; rk=4,0.
5
6
7
0,05
0,07
0,8
0,06
0,08
0,9
0,07
0,09
1,0
Результаты свести в таблицу 9
Таблица 9. Расчетные конструктивные параметры ЭМП
K
rя = f(k)
T2
q = f(T2 )
T1 = const
T2 = const
c = f(T2 )
0,4
0,5
0,6
0,7
0,8
0,9
1,0
0,03
0,04
0,05
0,06
0,07
0,08
0,09
0,03
0,04
0,05
0,06
0,07
0,08
0,09
57
rя = f(K); q = f(T2 ); c1 = f(T2 ).
2.1.3. Задание
1. Построить графики функций
rя = f(k); q = f(T2 ); c = f(T2 )
2. Разработать рекомендации по выбору параметров: характеристику q –
сделать линейной; коэффициент жесткости пружины – положительным.
3. Изучить конструкцию ЭМП.
2.1.4. Контрольные вопросы.
1. Напишите уравнение динамики ЭМП.
2. Какие параметры можно поменять, чтобы изменить динамические
характеристики преобразователя.
2.2. Гидроусилитель.
Цель работы. Ознакомиться с методикой моделирования работы
гидроаппаратуры и провести выбор конструкции элементов гидроусилителя.
2.2.1. Методика выполнения работы
Электромеханический
преобразователь
(ЭМП)
вызывает
перераспределение жидкости в управляющих лопостях гидроусилителя.
Гидравлическая усилительная часть золотника представляет собой
однощелевой золотник с обратной связью. Общий вид такого гидроусилителя
с кинематической связью по положению распределительного золотника
представлен на рис. 2.2
8
6
9
7
5
12
10
1
+ 58
Рис. 2.2 Сечение распределительного золотника
1 – управляющий золотник;
2 – шайба;
3 – распределительный золотник;
4 – плунжер;
5, 7 – постоянные дроссели;
6 – напорная магистраль;
8 – камера питания распред. золотника;
9 – шариковый клапан;
10 – корпус гидроусилителя;
11 – рабочее окно управляющего золотника;
12 – рабочая камера.
Основные элементы, входящие в конструкцию золотника: 1 управляющий золотник; 2 - шайба; 3 - распределительный золотник;4 плунжер; 5 - камеры питания.
Уравнение, описывающее динамику золотника, имеет вид
Tã ó
dρ
ρ K ã óρ ó
dt
Здесь
59
(2.8)
ξ 2 F2 ðýôô σ 2 1
Tã ó
2 ρ o K c σ 2 1 0,5Po Fðýôô
(2.9)
постоянная времени гидроусилителя
0,5Fðýôô ρ 0
,
(2.10)
Kã ó
2
2 ρ o K c σ 1 0,5Po Fðýôô
Передаточная функция
K ГУ
W(S)ГУ =
(2.11)
TГУ ∙ S + 1
где Кгу - коэффициенты передачи гидроусилителя, ρ - перемещение
распределительного золотника относительно среднего положения; ρ у перемещение управляющего золотника относительно среднего положения; ξ
- коэффициенты вязкого трения в рабочем окне управляющего золотника; l длина окна управляющего золотника; ρ 0 - начальный зазор между кромками
шайбы управляющего золотника; Кс - жесткость гидравлической силы
потока жидкости; - относительный радиальный зазор, Р0 - давление
питания.
Коэффициент вязкого трения в рабочем окне управляющего золотника
равен
ξ
2
где ρ
10
p10
V10
,
– начальное давление в рабочей камере; V10 - скорость жидкости.
Скорость жидкости определяется по формуле
V1
Qq
,
3f î ê
где Qq - допустимый расход жидкости при отсутствии управляющего сигнала
на входе золотника.
Для определения площади рабочего окна золотника предварительно
разобьем ее на три участка (рис.2.3). Согласно рисунку 2.3 площади этих
участков равны
f îêí SI SII SIII
По техническим характеристикам
распределительного золотника находим
ξ 8 103
60
и
конструктивным
размерам
Эффективная площадь рабочего окна управляющего золотника равна
Fðýôô
π 2
2
d 3 d ÎÒÂ
1,2
4
Общая длина рабочего окна управляющего золотника определяется по
формуле
πd 3 |2 7 10 1
d3 - диаметр золотника.
Жесткость гидродинамической силы потока жидкости, протекающей
через окна четырехщелевого распределительного золотника, находим:
Ψ
K c 1,63 0 0 d 3 ΔPîê 1,6 ,
360
где ΔPîê - перепад давления на рабочем окне, через которое жидкость
втекает во внутреннюю полость золотника.
Относительный зазор определяется по формуле
σ
ξ2
3 10 2
ρ
I
1.85
61
II
Рис. 2.3 Элементы сечений распределительного золотника
2.2.2 Порядок выполнения работы
Определить параметры конструкции золотника: ρ 0 - начальный зазор
между кромками шайбы управляющего золотника, Р0-давление питания при
заданных требованиях к динамическим характеристикам золотника Т и К.
Произвести решение уравнений (2.9) и (2.10):
Tã ó ξ 2 σ 2 1
Kã ó
0,5ρ 0
ξ2 2 1 Kãó
K
ρ0
2ξ 2 σ 2 1 ã ó
0,5 Tã ó
Tã ó
(2.12)
ξ 2 Fðýôô σ 2 1 2K c σ 2 1ρ 0 Tã ó
P0
0,5 Fðýôô Tã ó
ξ 2 Fðýôô σ 2 1 2K c σ 2 1 2ξ 2 σ 2 1
0,5 Fðýôô Tã ó
62
Kã ó
Tã ó
Tã ó
P0 ξ 2
F 4K c σ 1 K ã ó
σ 1 ðýôô
0,5 Fðýôô Tã ó
2
(2.13)
2
2.2.3 Задание
1. Построить графики функций ρ0 = f(k) по формуле (2.12) и P0 = f(k)
по формуле (2.13)
Данные для расчета характеристик представлены в таблице 10.
Таблица 10 Исходные данные для расчета характеристик гидроусилителя.
Варианты
1
Парам.
2
3
T
2·10-3 3·10-3 4·10-3
K
0,4
0,5
0,6
Результаты свести в таблицу 11
4
5
6
7
8
5·10-3
0,7
6·10-6
0,8
7·10-3
0,9
8·10-9
1,2
9·10-3
1,4
1,2
1,4
Таблица 11 Результаты расчета параметров гидроусилителя
К
Параметры
0,4
0,5
0,6
0,7
0,8
0,9
ρ0
P0
По результатам эксперимента построить графики. функций ρ0 = f(k), P0 =
f(k) в соответствии с данными Табл 10, 8, 11.
2. Разработать рекомендации по выбору параметров гидроусилителя
3. Разработать рекомендации изменения параметров для обеспечения условия
работы P0 > 0.
2.2.4. Контрольные вопросы.
1. Какие параметры конструкции можно изменять, чтобы получить заданные
значения ρ0 и P0 .
2. Подобрать типы стандартных гидроусилителей для данных параметров.
2.3. Гидродвигатель
63
Цель работы. ознакомиться с методикой моделирования работы
гидроаппаратуры и провести сравнение способов идентификации объекта.
2.3.1. Методика выполнения работы.
Золотник управляет работой гидродвигателя. Уравнение скоростной
характеристики гидравлического двигателя имеет вид:
d μ 1 g
(2.14)
P0 ΔPf1 μ1 g P0 ΔPf ' ,
ω
dt
q γ
q γ
где ω d угловая скорость поворота вала двигателя; μ 1 -коэффициент
dt
расхода жидкости; Р0 - давление в напорной магистрали; Δ Р - перепад
давления, создаваемый внешней нагрузкой; γ - удельный вес жидкости: f1, f ׳
- проходные отверстия впускных и выпускных окон золотника: q - удельный
объем (объем, занимаемый жидкостью в одном радиане угла поворота
выходного вала); g- постоянная свободного падения.
Принимая формулу рабочего окна распределительного золотника
прямоугольной и считая коэффициент расхода в этом окне постоянной
величиной, запишем уравнение (2.14) в виде
l gP0
ΔP ,
(2.15)
ωμ
1
ρ
q γ
P0
где ℓ - эффективная длина рабочих кромок золотниковой пары; 𝜌 отклонение распределительного золотника от среднего положения.
Введем обозначение
l gP0 ,
(2.16)
Kw μ
q γ
где Kw - крутизна скоростной характеристики холостого хода
гидравлического исполнительного механизма с идеальным золотником;
Тогда (2.15) запишем
ΔP .
(2.17)
ω K w 1
P0
Сумма всех внешних погрузок, действующих на вал гидродвигателя,
уравновешивается перепадом давлений
1 d 2
d
ΔP J 2 h
K J M 0 M òð ,
q dt
dt
где J - момент инерции подвижных частей гидродвигателя и нагрузки,
приведенные к выходному валу; h – коэффициент вязкого трения нагрузки,
приведенный к выходному валу гидродвигателя; Кш - жесткость внешней
64
нагрузки или коэффициент шарнирного момента; М0 - постоянный момент,
действующий на выходной вал гидромотора; Мтр - момент трения.
Тогда уравнение гидродвигателя примет вид
(2.18)
M
d
1 d 2
d
Kw l T
J 2 h
K J M 0ρ
dt
P0
P0 q dt
dt
Анализировать это уравнение сложно, поэтому величинами Кш, , h
d
и
dt
М0 пренебрегаем; а
M ÒÐ
1
P0 q
Тогда уравнение (2.18) можно представить в виде
l
J d
2
d
2
K w ρ 1
P
q
dt
dt
0
2
2
(2.19)
обозначим
J
d
d 2 dx
K w ρ a;
b ;
x; 2 .
P0 q
dt
dt
dt
Тогда (2.19) можно записать
dx
a 2b
x2 a2
dt
Разделим переменные в (2.20) и проинтегрируем
откуда
(2.20)
x
t
a 2b
dx
2
dx dt; a b 2
dt ,
2
0 a x
0
a2 x2
2t
2t
x ((eab + 1)) = a ((eab − 1))
или
x=
dφ
=ω=a
dt
2t
ab
e
−1
2t
ab
e
+1
(2.21)
Тогда
2t
ω=a
1 − e−ab
−
2t
ab
(2.22)
1+e
Переходный процесс, полученный согласно (2.22), является
апериодическим, следовательно, передаточную функцию для угловой
скорости гидродвигателя можно аппроксимировать апериодическим звеном
первого порядка
65
ω a 1 e T ,
t
(2.23)
где Т - постоянная времени
Основным условием аппроксимации является равенство процессов,
характеризуемых уравнениями (2.22) и (2.23), т.е.
a
2t
1 e ab
1 e T .
a
2t
t
(2.24)
1 e ab
В работе необходимо провести исследование процесса по (2.23) и
определить экспериментально величину постоянной времени Т для
гидродвигателя. Найденную величину Т сравнить с теоретической, которая
может быть найдена следующим образом. Для нахождения величины Т
продифференцируем уравнение
2t
e ab 1
и получим
a 2t
a 1 e T
e ab 1
t
2t
2t
2t
2t
e ab 1 2 e ab e ab 1 2 e ab
t
T
e
ab
ab
2
2t
T
e ab 1
и при t = 0 получим
Отсюда
4
1
4ab T
T a b,
(2.25)
J
(2.26)
p0 ∙ q
Таким образом, передаточную функцию гидродвигателя по скорости
можно записать:
K ,
(2.27)
W(S)
T S 1
где
a
ðàä
T abc
K Kw
ρ
ñì ñ
где b =
Отсюда следует, что динамические показатели гидродвигателей зависят
от величины инерционной нагрузки и от величины перемещения золотника.
2.3.2. Порядок выполнения работы.
66
Определить аналитически величину постоянной времени TТ по
формулам (2.26) и (2.25) при исходных данных таблицы 12
Таблица 12 Характеристики переходного процесса
Варианты
t
J
0,1
0,2
0,4
0,6
0,8
1,0
2,0
3,0
1
2·10-2
2
4·10-2
3
6·10-2
4
8·10-2
при а=40; P0 =50; q=1,3.
2.3.3 Задание
1. Построить график переходного процесса ω = f(t) по формуле (2.23.) для
вычисленного значения TТ
ω
t
0,1
0,2
0,3
0,4
0,6
Рис. 2.3 Характеристика апериодического процесса двигателя.
График
(рис.2.3)
принимаем
за
экспериментально
полученную
характеристику гидродвигателя. По известной методике, определяем в 3х
точках величины постоянных времени 𝑇1 ; 𝑇2 ; 𝑇3
2. Найти среднее значение постоянной 𝑇ср =
𝑇𝑖
(i=1, 3)
3
3. Найти относительную ошибку
∆T = (
TТ − Tср.
) ∙ 100%
TТ
2.3.3 Контрольные вопросы.
1. Какие конструктивные элементы можно менять, чтобы получить заданные
динамические показатели гидродвигателя?
67
2. Какие методы применять с целью уменьшения ошибок при исследованиях?
3. Подобрать типы гидродвигателей, используемых в ваших исследованиях.
2.4. Исследование устойчивости системы управления.
Цель работы. Ознакомиться
автоматического управления.
с
методикой
исследования
системы
2.4.1 Методика выполнения работы.
Частотные критерии позволяют судить об устойчивости систем
автоматического управления по виду их частотных характеристик. Эти
критерии
являются
графоаналитическими
и
получили
широкое
распространение, так как позволяют сравнительно легко исследовать
устойчивость системы высокого порядка и имеют простую геометрическую
интерпретацию и наглядность.
Критерий устойчивости Найквиста позволяет судить об устойчивости
замкнутой системы по виду амплитудно-фазовой характеристики
разомкнутой системы.
Пусть передаточная функция разомкнутой системы имеет вид
R(S) b0 s m + b1 s m−1 +. . . . +bm
W(S) =
=
, m<𝑛
Q(S)
a0 s n + a1 s n−1 +. . . +an
(2.28)
Подставляя в (2.28) s=jω, получаем частотную передаточную функцию
разомкнутой системы
R(jω) b0 (jω)m + b1 (jω)m−1 + ⋯ . +bm
W(jω) =
=
=
Q(jω)
a0 (jω)n + a1 (jω)n−1 + ⋯ + an
= V(ω) + jU(ω),
(2.29)
где V(ω) и jU(ω) – действительная и мнимая части частотной передаточной
функции; модуль A(ω) и фаза φ(ω) частотной передаточной функции равны
A(ω) = √V 2 (ω) + U 2 (ω) ,
φ(ω) = arctg
U(ω)
.
V(ω)
Если изменить частоту ω от −∞ до ∞, то вектор W(jω) будет меняться по
величине и фазе. Кривую, описываемую концом этого вектора в комплексной
68
плоскости, называют амплитудно-фазовой характеристикой (АФХ)
разомкнутой системы (рис.2.4). АФХ симметрична относительной
вещественной оси, поэтому обычно
U(ω)
ω<0
W(jω)
ω<±∞
V(ω)
0
A(-1,j0)
ω=0
φ(ω)
A(ω)
ω>0
Рис. 2.4. Амплитудно-фазовая характеристика разомкнутой системы.
вычерчивают только ту её часть, которая соответствует положительным
частотам ω>0 (сплошная линия на рис 2.4), а ветвь, соответствующая
отрицательным частотам ω<0, может быть найдена как зеркальное
отображение ветви, соответствующей ω>0.
Формулировка критерия устойчивости Найквиста: если разомкнутая
система автоматического управления устойчивая, то замкнутая система
автоматического управления также будет устойчива, если амплитуднофазовая характеристика разомкнутой системы W(jω) не охватывает точку
A(-1,j0).
2.4.1. Порядок выполнения работы.
Последовательность операций рассмотрим на примере
Произведём определение устойчивости системы, предназначенной для
стабилизации качающейся платформы, передаточная функция которой имеет
вид:
W(S) =
k(1 + ST3 )
S(1 + ST1 )(1 + ST2 )
K = 25; T1 = 0,08; T2 = 0,21; T3 = 0,04
69
(2.30)
Построение А.Ф.Х. производится в следующем порядке:
1. Раскроем скобки в (2.30) и группируем члены по степеням “S”
W(S) =
k(1 + ST3 )
T1 T2 S 3 + (T1 + T2 )S 2 + S
2. Заменим S → jw, введем буквенные значения для коэффициентов.
W(jω) =
где b3 = T1 T2 ;
k(1 + JωT3 )
−jω3 b3 − ω2 b2 + jω
,
(2.31)
b2 = T1 + T2 .
3. Отделяем в знаменателе вещественную часть от мнимой и умножаем
числитель и знаменатель на функцию, сопряжённую знаменателю (2.31)
W(jω)
k(−1 + JωT3 )[−b2 ω2 − j(ω − b3 ω3 )]
=
[−b2 ω2 + j(ω − b3 ω3 )][−b2 ω2 − j(ω − b3 ω3 )]
(2.32)
4. В (2.32) группируем члены по степеням “ω” и отделяем в числителе
действительную часть от мнимой:
W(jω)
k(T3 − b2 )ω2 − kb3 T3 ω4 + j[−kω + k(b3 − b2 T3 )ω3 ]
=
ω3 + (b22 − 2b3 )ω4 + b23 ω6
(2.33)
5. Вводим буквенные обозначения для коэффициентов (2.32):
W(jω)
где a1 = 𝑘;
C2 = 1;
a2 ω2 − a4 ω4 + j(−a1 ω + a3 ω3 )
=
,
C2 ω2 + C4 ω 4 + C6 ω6
a2 = k(T3 − b2 );
C4 = C22 − 2b3 ;
a3 = k(b3 − b2 T3 );
(2.34)
a4 = kb3 T3 ;
C6 = T12 − T22
6. Производим расчет численных значений коэффициентов в Wjω
(2.34)
W(jω)
−6,25ω2 − 0,017ω4 + j(−25ω + 0,13ω3 )
=
;
ω2 + 0,051ω4 + 2,8 ∗ 10−4 ω2
(2.35)
7. Задаваясь значениями W, определяем координаты точки АФХ (2.35)
(Таблица 14)
Таблица 14 Результаты расчета АФХ
70
ω
V(ω)
jU(ω)
5
-2,7
-1,8
7
-1,7
-0,6
10
-0,9
-0,13
20
-0,19
0,02
8. По полученным точкам строим АФХ. По ее расположению
устанавливаем, что построенная система устойчива.
jU(ω)
2
1
A(-1,j0)
-2
-1
ω=20
V(ω)
1
ω=7
ω=10
ω=5
2
ω=0
-1
-2
-3
2.4.3. Задание
1. Заданы структурные схемы различных вариантов систем управления (рис.
2.5)
X1
X3
X2
W1
W3
W2
W4
W5
X2
X1
W1
X4
X3
W2
W3
W4
X5
W5
71
Рис. 2.5 Структурные схемы систем управления
и исходные данные передаточных функций звеньев системы (таблица 13)
Таблица 13 Исходные данные передаточных функций систем.
Варианты
Передаточные
функции
Wi (S)
2
3
4
5
K1
10
15
20
24
5
0,1S + 1
3
0,1S + 1
8
0,2S + 1
12
0,2S + 1
W1 (S)
W2 (S)
W3 (S)
W4 (S)
W5 (S)
W2 (S) =
K2
T2 S + 1
K 3 (T6 S + 1 5(0,2S + 1)
T3 S + 1
0,3S + 1
K4
20
W4 (S) =
T4 S + 1
0,2S + 1
K5
4
W5 (S) =
T5 S + 1
0,1S + 1
W3 (S) =
10(0,2S + 1) 5(0,1S + 1)
0,5S + 1
0,4S + 1
10
15
0,1S + 1
0,3S + 1
6
3
0,2S + 1
0,1S + 1
15(0,4S + 1)
0,6S + 1
12
0,2S + 1
10
0,4S + 1
2. По заданной структурной схеме (рис. 2.5) найти передаточную функцию
разомкнутой системы.
3. Построить амплитудно-фазовую характеристику разомкнутой системы и
определить характер устойчивости системы.
2.4.4. Контрольные вопросы.
1. Ознакомиться с критерием устойчивости А. В. Михайлова для замкнутых
систем.
2. При неустойчивом характере системы предложить методы коррекции
свойств системы.
3. Ознакомиться с методами коррекций многоконтурных систем.
72
Глава 3. Моделирование технологических
процессов лесного производства.
3.1. Определение диапазона диаметров пиловочного
сырья для выработки обрезных пиломатериалов
заданного сечения.
73
Цель работы. Изучить возможности выработки обрезных пиломатериалов
заданного сечения из пиловочного сырья различных диаметров.
3.1.1. Методика выполнения работы.
Пиломатериалы, получаемые в лесопильном цехе, являются
полуфабрикатами, предназначенными для выработки различного типа
деталей и заготовок. При выработке заготовок предъявляются различные
требования к пиломатериалам заготовки брусового типа, имеющим заданные
размеры в сечении и по длине.
Пиломатериалами, отвечающими этим требованиям, являются
обрезные доски заданных размеров, получаемые по брусово-развальному
способу раскроя бревен из зоны пропилочной части бруса.
Брус, который обеспечивает максимальный выход обрезных
пиломатериалов заданного сечения, представляет собой в поперечном
1
сечении
квадрат,
сторона
которого
составляет
≈ 0,707 от
√2
вертикального диаметра d бревна. A=0,707d
На рисунке 1 показана схема выработки обрезных пиломатериалов
брусово-развальным способом.
B
d
A
A
Рис.3.1. Схема выработки пиломатериалов
При известных спецификациях пиломатериалов и сырья представляется
возможным для каждого заданного сечения обрезных пиломатериалов
подобрать тот диаметр бревна, который отвечает вышеприведенной
зависимости
d
A
0,707
74
(3.1)
Однако в производственных условиях часто бывает трудно подобрать
быстро только один диаметр или его объем недостаточен для выработки
большого качества обрезных пиломатериалов заданной ширины и толщины.
Поэтому для практических целей встает задача выяснения возможности
выработки пиломатериалов одинаковой ширины из смежных диаметров без
сколько-нибудь значительной потери в выходе пиломатериалов. Решить эту
задачу можно, если принимать во внимание, что в любом диаметре бревен
допускаются отклонения от оптимальной толщины бруса (соответствующей
брусу максимального объема) в большую или меньшую сторону при
условии, что объемы (или площади поперечных сечений), получающихся при
этом прямоугольных брусьев, не будет отличаться от объема (или площади)
максимального бруса больше, чем на 4%.
Если заданная ширина обрезных пиломатериалов укладывается в
отклонение от оптимальной толщины бруса в конкретном диаметре, то
данный диаметр может быть использован для выработки этих
пиломатериалов. В этом случае появляется возможность выработки обрезных
пиломатериалов одинаковой ширины из бревен различных диаметров, что
обеспечивает проведение планирования раскроя широким фронтом поставок.
Построить и исследовать зависимость Sотн – площади поперечного
сечения бруса (в процентах) от высоты f бруса в долях диаметра. Величина
Sотн равна отношению площади поперечного сечения бруса максимального
объема Sоб. макс.
Sотн =
Sбр.
Sбр max
=
A∙B
A∙B
=
(0,707d) ∙ (0,707d) 0,5d2
Величина f =
Отсюда Sотн =
A
d
(3.4)
A∙B
B ∙ fd
B∙f
=
=
0,5d2 0,5d2 0,5d
Из рис 3.1 находм 𝐵 = √𝑑 2 − 𝐴2
(3.2)
(3.4)
(3.5).
Подставляем (3.5) в (3.4), тогда
f=
0,5d ∙ Sотн
√d2 − d2 f 2
Получим
75
(3.6).
Sотн =
f ∙ d√1 − f 2
= 2f√1 − f 2
0,5d
(3.7)
По формуле (3.7) строим зависимость S от f согласно таблице 15
Таблица 15 Зависимость площади поперечного сечения бруса от диаметра
бревна.
f
Sотн
0,3
0,4
0,5
0,6
0,7
0,8
0,9
Sопт
fопт
3.1.2 Порядок выполнения работы.
1 Построить график зависимости Sотн от f , используя данные таблицы
15. (рис. 3.2)
Sотн.
0,6
0,7
0,8
f
Рис 3.2. Оптимальный диапазон размеров бруса.
2. По данным графика (или таблицы 15) найти диапазон параметров сторон
бруса (в долях диаметра), внутри которого площадь поперечного сечения
бруса уменьшается не более чем на 4% от максимального значения.
Убедиться, что диапазон составляет 0,6 ≤ f ≤ 0,8, тогда A=(0,6÷0,8)d (рис.
3.2)
3.1.3 Задание
1. В заданном диапазоне диаметров (таблица 16) выбрать 5 брёвен
различного диаметра и с учетом построенных зависимостей (рис.3.2)
определить размеры бруса, обеспечивающего оптимальную выработку
пиломатериалов. Результаты расчетов свести в таблицу 16.
Таблица 16. Результаты расчета заданных сечений бруса.
76
Варианты
1
2
3
4
Параметры(мм
0
1
2
3
4
1
2
3
4
5
d0=130
d=
d
d
d
S0 (при d0)
S1
S2
S3
S4
S5
140÷180
140÷230
240÷270
280÷340
78×104
–
–
–
–
2. Из полученного бруса необходимо выработать обрезные пиломатериалы,
сечение которых в соответствии с ГОСТ 9463-72 представлены в таблице 17
Таблица 17 Сечение обрезных пиломатериалов
Варианты
1
2
3
4
5
6
7
8
9
Сечение пиломатериалов
25×100
25×125
32×125
40×150
50×175
50×225
60×250
75×250
75×175
Из таблицы 16 при d0 бревна=130 мм получаем брус сечением 78×104, из
которого можем выработать 3 доски размером 25×100 (рис.3.3.)75
77
Рис 3.3 Раскрой бруса
3. Определить процент выхода пиломатериалов для заданных диаметров
бревен.
Так для d0=130 и размерах бруса 72×104 имеем выход обрезных
пиломатериалов
25 × 3 × 100
∙ 100% = 96%
78 × 104
4. Построить график процентного выхода пиломатериалов от диаметра
брёвен (рис. 3.4)
%100
80
70
60
d1
d1
d1
d1
d1
d
Рис. 3.4 Процент выхода пиломатериалов
3.1.4. Контрольные вопросы.
1. Как подобрать диаметр бревна, из которого можно выработать брус
максимального объёма?
2. На сколько расширяется диапазон диаметров брёвен для выработки
обрезных пиломатериалов одного сечения?
3.2 Исследование эффективности способов раскроя
необрезных досок на заготовки.
78
Цель работы: Исследование выхода заготовок из необрезных
пиломатериалов при поперечно-продольном и продольно-поперечном
способах раскроя в зависимости от качества и коэффициента сбега
пиломатериалов. Определение области применения поперечно-продольного
и продольно-поперечного способов раскроя необрезных пиломатериалов на
заготовки.
3.2.1. Методика выполнения работы
Наиболее распространенными являются два способа раскроя
пиломатериалов на заготовки: поперечно-продольный и продольнопоперечный. Название этих способов соответствует последовательности
выполнения операций по раскрою досок. При поперечно-продольном
способе раскроя вначале формируется длина заготовки, а затем ее ширина.
При продольно-поперечном, наоборот, сначала формируется ширина, а затем
длина заготовки.
Если качество заготовок соответствует качеству пиломатериалов, а
следовательно, не требуется производить вырезку недопустимых в
заготовках пороков, то при раскрое обрезных пиломатериалов оба способа
дают одинаковый выход заготовок. В этом случае величина выхода заготовок
определяется только краткостью размеров пиломатериалов и заготовок по
ширине и длине. Если качество пиломатериалов не соответствует качеству
заготовок, то при раскрое пиломатериалов требуется вырезать недопустимые
пороки. В этом случае при раскрое обрезных пиломатериалов имеет место
продольно-поперечный способ раскроя. Это объясняется тем, что при продольно-поперечном способе раскроя в отходы идет значительно меньшее
количество древесины, чем при поперечно-продольном способе, т.к.
оператор имеет возможность формировать длину заготовок с учетом
расположения пороков на пласти доски. При поперечно-продольном способе
такая возможность отсутствует (рис.3.5).
Таким образом, при выработке заготовки из обрезных пиломатериалов,
качество которых не соответствует качеству заготовок, следует всегда
использовать продольно-поперечный способ раскроя. По-другому обстоит
дело, когда заготовки вырабатываются из необрезных пиломатериалов. Если
качество необрезных пиломатериалов соответствует качеству заготовок, то
при большем сбеге для лучшего использования сбеговой зоны целесообразно
применять поперечно-продольный способ раскроя (рис.3.6).
79
a
б
Рис. 1. Способы раскроя пластин:
а - поперечно-продольный способ; б - продольно-поперечный способ
80
Рис. 3.6. Способы раскроя необрезных материалов: а - поперечнопродольный способ; б - продольно-поперечный способ
С другой стороны, при вырезке недопустимых пороков преимущество
имеет продольно-поперечный способ. Поэтому при раскрое необрезных
пиломатериалов, качество которых не соответствует качеству заготовок,
выбор способа раскроя зависит от конкретных значений сбега
пиломатериалов и их качества. Таким образом, возникает задача определения
оптимального способа раскроя необрезных досок, дающего больший выход
заготовок.
Для решения этой задачи необходимо иметь строгие математические
зависимости, связывающие качество материалов и их сбег с выходом
заготовок при поперечно-продольном и продольно-поперечном способах
раскроя. Однако получить зависимости, связывающие качество
пиломатериалов и их сбег с выходом заготовок, теоретическим путем очень
сложно.
Объясняется это в основном тем. что параметры пороков (размеры,
форма, расположение на пласти доски), хотя и подчиняется некоторым
статистическим закономерностям, являются случайными величинами. По
этой причине для получения зависимостей используются экспериментальные
методы.
Задача получения зависимости между качеством пиломатериалов и
выходом заготовок усложняется тем, что при оценке качества
пиломатериалов необходимо учитывать пороки нескольких типов (сучки,
гниль, наклон волокон, трещины).
С другой стороны, известно, что основными сортообразующими
пороками
в
хвойных
материалах
являются
сучки.
Поэтому для оценки качества пиломатериалов можно использовать
насыщенность
пластин
.досок
сучками.
Этот
показатель
определяется как отношение суммарной площади сучков Sc к
площади пластин доски Sд:
S
(3.8)
γ c 100%
Sä
81
где γ - насыщенность пластин доски сучками (%).
Используя насыщенность пластин доски в качестве оценочного
показателя сортности материала, уравнения, описывающие выход заготовок
при различных способах раскроя, в общем виде можно записать следующим
образом:
y1 =φ1 (γ,m,n,S,f)
(3.9)
y2 = φ2 (γ,m,n,S,f),
(3.10)
где y1- выход заготовок в % при поперечно-продольном способе раскроя; m средняя кратность пиломатериалов и заготовок по ширине; y2 - выход
заготовок при продольно-поперечном способе раскроя; n - средняя кратность
пиломатериалов и заготовок по длине; S - коэффициент сбега
пиломатериалов; f - кривизна досок по кромке.
Как видно из выражений (3.9) и (3.10), выход заготовок из не
обрезных
материалов
определяется
не
только
насыщенностью
пластин доски γ и ее сбегом S, но и средней кратностью пиломатериалов и
заготовок
по
ширине
и
длине,
а
также
кривизной
досок по кромке f. В данной лабораторной работе будет исследоваться
эффективность различных способов раскроя в зависимости только от двух
факторов: насыщенность пластин доски сучками γ ее сбега S. При этом
предполагается, что основные факторы имеют постоянное значение
m = Const, n = Const, f = Const.
С учетом этого выражения (2) и (3) упрощаются
(3.11)
y1 1 γ, S
(3.12)
y 2 2 γ, S
Рассмотрим теперь, как, используя (3.11) и (3.12), определить области
применения поперечно-продольного и продольно-поперечного способов
раскроя. Пусть требуется выбрать оптимальный способ раскроя партии
пиломатериалов, у которых насыщенность пластей досок равна γ 1 , а
величина сбега S1. Предположим, что выражения (3.11) и (3.12) известны
нам в явном виде.
Подставим в эти выражения значения γ 1 и S1 и сравним величину y1 с
у2. Если y1 > у2 (3.13), то необходимо использовать поперечно-продольный
способ раскроя. Если у2 >y1 (3.14), то следует применять продольнопоперечный способ раскроя. Если y1 = у2 (3.15), то оба способа равноценны и
выбор одного из них определяется технологическим удобством выполнения
операции раскроя.
Аналогичным способом можно определять оптимальный способ
82
раскроя для любых других значений γ и S. Совокупность пар значений γ и
S, для которых продольно-поперечный способ дает больший выход заготовок
(y1 > у2), называется областью применения поперечно-продольного
способа. Совокупность пар значений у и S, для которых больший выход
заготовок дает продольно-поперечный способ (у2>y1), называется
областью применения продольно-поперечного способа. Зная область
применения
этих
способов,
технолог
по
известным
параметрам
пиломатериалов
может
заранее
выбрать
оптимальный
способ раскроя.
Определить область применения каждого из 2-х способов раскроя
можно следующим образом. Рассмотрим графики зависимости выхода
заготовок от насыщенности пластин доски и сбега при поперечнопродольном ( y1 1 γ, S ) и продольно-поперечном ( y 2 2 γ, S ) способах
раскроя, построенные на одной координатной плоскости (рис.3.7).
Сплошными линиями здесь показана зависимость выхода заготовок от сбега
досок S для поперечно-продольного способа раскроя при различных
значениях насыщенности пластин досок γ . Пунктирными линиями показана
аналогичная зависимость для продольно-поперечного способа.
Пронумерованные точки, стоящие на пересечении кривых y1 1 γ, S
и y 2 2 γ, S, соответствуют таким значениям γ и S (при одинаковых
значениях γ ), при которых выход заготовок при поперечно-продольном и
продольно-поперечном способах равен
1 γ, S 2 γ, S
(3.16)
Левее этих точек больший выход дает продольно-поперечный способ;
правее - поперечно-продольный. Следовательно, кривая y1 = у2 , проведенная
через пронумерованные точки, соответствует границе области применения
поперечно-продольного и продольно-поперечного способов раскроя.
Для более наглядного представления области применения каждого
способа кривую y1=у2 строят в другой системе координат, откладывая по оси
абсцисс насыщенность пластин доски γ , а по оси ординат - сбег S (рис.3.8).
Границу области применения каждого способа строят путем переноса в
новую систему координат точек пересечения кривых y1 1 γ, S и
y 2 2 γ, S. Соединив эти точки, получим границу области применения
способов раскроя (рис.3.8). При раскрое досок, для которых насыщенность
пластин доски γ и сбег S соответствует точке, лежащей на кривой y1=у2,
83
следует применять продольно-поперечный способ.
В настоящей работе требуется определить область применения каждого
из способов раскроя. Раскрой пиломатериалов производится при следующих
условиях.
Величина сбега необрезных пиломатериалов и насыщенность пластин
доски измеряется в процессе выполнения лабораторной работы по паспортам
досок. На паспорте доски в масштабе изображена пласть доски с
наклеенными на нее координатами сучков. В скобках указана площадь
каждого сучкав м2. Для нахождения сбега необходимо с помощью линейки
измерить в мм, с учетом масштаба, ширину вершинного конца
bк. Сбег доски определяется по формуле:
b â 100%
L 1000
где L - длина необрезной доски в м.
S
b
(3.17)
k
y1 ,y2(%)
67
65
1
61
2
S
57
53
2
3
49
область применения
поперечно-продольного
способа
1,75
45
1,5
41
область
применения
продольнопоперечного
способа
1,25
37
1
1,25
1,5
1,75
2,0
S
0
0,5
1,0
1,5
γ (%)
2,0
Рис.
3.8
Построение
способа раскроя
Рис.
3.7
Зависимость
выхода
заготовок при различных способах
раскроя
границы
Далее определяются общая площадь So сучков, выходящих на пласти
доски, которая находится суммированием площадей отдельных сучков, и
площадь Sд пласти необрезной доски;
b bb
(3.18)
Sä ê
Lì 2
2 1000
Затем по формуле (1) γ Sc 100% рассчитывается насыщенность
Sä
пласти доски сучками, %.
Для получения значений γ и S требуется определить выход заготовок
84
при использовании каждого способа раскроя.
4.05 2
(3.19)
S
8
2.7 2
(3.20)
y 2 2.48
S
4
По найденным значениям y и S, можно определить выход заготовок,
который получается при раскрое пиломатериалов с данной величиной сбега и
насыщенностью пласти доски сучками. Аналогичным образом находится
выход заготовок при раскрое пиломатериалов с другими значениями и S.
В
результате
по
найденным
значениям
y1 1 γ, S и
y1 4.05
y 2 2 γ, Sможно определить область применения поперечно-продольного и
продольно-поперечного способов при раскрое необрезных пиломатериалов
на заготовки.
3.2.2 Порядок выполнения работы
1. Изучить указания по методике выполнения лабораторной работы.
Подготовить данные для таблиц 18 и 19.
2. По исходным данным таблицы 18, по формулам (3.17) и
(3.18) рассчитать сбег S и площадь доски Sд(м2), найти по формуле (3.8)
насыщенность γ %, пласти доски сучками. Результаты расчетов занести в
таблицу 18.
3. Сравнить значения насыщенности пластин сучками для
различных досок, записанные в 8-ом столбце таблицы 18.
Таблица 18 Технологические характеристики досок
№
доски
Ширина
вершинно
го
конца
bв(мм)
1
2
3
160
170
180
Ширина комлевого
конца
bк(мм)
182
197
203
Длина
доски
L(м)
Сбег
S(%)
2
2,10
2,20
85
Площадь
доски
Sд(м2)
Суммарная
площадь
сучков
Sс(м2)
0,002
0,0028
0,0018
Насыщенность
пласта
доски
сучками
γ (%)
4
5
6
7
8
9
10
190
200
210
220
230
240
268
212
228
230
245
254
260
268
2,0
2,18
2,40
2,12
2,16
2,10
2,32
0,003
0,0024
0,002
0,0026
0.0024
0,0032
0,003
Подготовить данные для таблицы 19.
Таблица 19 Характеристики способов раскроя досок
Насыщенность
№ доски Сбег
Выход заготовок Выход заготовок
пласта
доски
S, %
при поперечно- при продольносучками γ, %
продольном
поперечном
способе
способе
y1(%)
y2(%)
3.2.3 Задание
1.Найти значения выхода заготовок от сбега S при различных
значениях насыщенности пласта доски сучками γ для поперечнопродольного y1 1 γ, S и продольно-поперечного y 2 2 γ, S способов
раскроя по данным таблицы 19.
2. Построить графики зависимости выхода заготовок от
сбега S и насыщенности сучками, аналогичные графикам, приведенным на
рис.3.7
Сплошной
линией
показать
зависимость
выхода заготовок при продольно-поперечном способе, пунктирной - при
поперечном-продольном.
3.
Определить
области
применения
поперечнопродольного
и
продольно-поперечного
способов
раскроя.
Для
этого выполнить:
4.
Отметить и пронумеровать точки пересечения прямых,
характеризующих выход заготовок в зависимости от S при различных
способах раскроя для одинаковых значений у так, как показано на рис. 3.7
6.2. Перенести полученные точки на координатную плоскость, в
которой по абсциссе отметим сбег доски S, а по оси
ординат - насыщенность пласта доски сучками у так, как это сделано на рис.
3.8 и описано в методике. Выше полученной прямой будет находиться
86
область применения поперечно-продольного способа раскроя, ниже - область
применения продольно-поперечного.
7. Проверить результаты определения области применения
различных способов раскроя. Для этого на полученный рисунок нанести
точки с координатами, соответствующими значениями γ и S, приведенным в
1-м и 3-м столбцах таблицы 19. Рядом с точками проставить величину
выхода заготовок при раскрое данной доски y1 и у2 . Если точка лежит выше
границы области, то при раскрое данной доски поперечно-продольным
способом выход должен быть больше: y2 > у1. Если точка лежит ниже, то y1
> у2.
3.2.4 Контрольные вопросы
1. Каким способом следует воспользоваться при
S=3%
γ=1,5%
2. Каким способом изменится график для определения способа раскроя
при увеличении кривизны досок на кромке?
3.3 Исследование влияния технологических факторов на
коэффициент использования машинного времени обрезного
станка.
Цель работы: Исследование зависимости коэффициента использования машинного времени обрезного станка от длины необрезных
досок, скорости подачи станка и времени, затрачиваемого на
вспомогательные операции. Определение степени влияния указанных
технологических факторов на производительность обрезного станка и
направлений ее повышений.
3.3.1 Методика выполнения работы
Расчетная производительность обрезного станка в погонных метрах
обрезных досок в минуту определяется по формуле:
A=U∙Kм
(3.21)
где U – скорость подачи, принимается по средней толщине обрезных досок;
Км - коэффициент использования машинного времени обрезного станка.
Из формулы следует, что величина коэффициента использования
машинного времени может оказать значительное влияние на
производительность обрезного станка. Однако в технической литературе
данные о значении коэффициента являются усредненными и поэтому
в.условиях конкретного производства не могут обеспечить необходимой
точности расчетов.
Коэффициент использования машинного времени Км учитывает
скрытые потери времени работы обрезного станка. На обрезном станке часть
87
времени, затрачиваемого на прием, осмотр, направление досок в вальцы
станка перекрывается временем, за которое обрезается предыдущая доска. Но
часть времени, затрачиваемого на эту операцию и, главным образом, на
перемещение пилы, остается не перекрытым. Оно вызывает межторцевые
разрывы и определяет Км
Таким образом,
60
t
t
60
U
,
(3.22)
Kì p p
60
U
t tp tâ
t â 60 Ut â t â
U
60
где tp - время обрезки доски (с); t - полный цикл обработки одной доски,
включая время на перемещение пилы (с); tв - неперекрываемое
вспомогательное время (с); ℓ - длина доски (м); U -скорость подачи (м/мин).
Из формулы (3.22) следует, что Км меняется с изменением длины
доски, скорости подачи и неперекрываемого вспомогательного времени.
Экспериментальные данные показывают, что неперекрываемое время у
современных обрезных станков составляет 1...2 с. Средняя длина досок
может быть принята равной длине бревна минус один метр .Скорость подачи
для обрезного станка Ц2-Д5А U = 80÷120 м/мин или 100÷150 м/мин.
Пользуясь формулой (3.22), можно построить кривые зависимости от
скорости подачи и длины досок при определенном значении
неперекрываемого времени tв.
Анализ кривых позволит сделать выводы о возможных направлениях
производительности обрезных станков.
3.32 Порядок выполнения работы
1. Изучить раздел "Методика выполнения работы".
2. Подготовить таблицы 21,22,23 по образцу таблицы 20.
Таблица 20 Исходные данные для расчета
Kм
ℓ (м)
U
м/мин
4,0
4,5
80
100
120
88
5,0
5,5
150
3.3.3 Задание
3.вычислить зависимость Км по формуле (3.22) от t, ℓ, U и при каждом t
заполнить таблицы 2, 3, 4 при tp=l,0; 1,5; 2,0
4. С использованием полученных данных построить:
-семейство зависимостей Км от U и l, равным поочередно
4; 4,5; 5,0; 5,5 м для tp= l ceк;
-два аналогичных семейства при tp=1,5с и tp=2c.
3.3.4 Контрольные вопросы
1. Пропорционально ли повышению скорости подачи увеличивается
расчетная производительность обрезного станка?
2. Как влияет совершенствование системы управления обрезными
станками и организация рабочего места на повышение производительности
станка?
3. Влияет ли специализация потоков по ширине обрезных
досок на производительность обрезного станка?
4. Влияет ли длина доски на производительность обрезного станка?
3.4. Моделирование процесса роста лесного массива
Цель работы. Изучить методику исследования многосвязного объекта
с целью идентификации сложных объектов в стационарном режиме.
3.4.1 Методика выполнения работы
В районе Братского промышленного узла находятся в той или иной
степени повреждения лесные массивы, что является следствием
промышленных выбросов. Адекватная математическая модель лесного
объекта позволит разработать конкретные меры по восстановлению
поврежденных лесов и снижению количества вредных выбросов.
Универсальным, применимым для многих типов систем управления,
является метод структурных графов. Применение этого метода позволяет
реализовать структурный подход к разработке системы: процесс синтеза
состоит из нескольких функциональных подпроцессов, которые, в свою
очередь, можно разбить на отдельные функции. Каждый отдельный этап
синтеза приводит к конкретным результатам. Метод структурных графов
изначально ориентирован на использование ЭВМ в процессе синтеза, легко
поддается алгоритмизации.
89
Обобщенная схема методики моделирования многосвязного объекта
управления методом структурных графов изображена на рис 3.9
Исходные данные
Таблица взаимодействия параметров
Функциональная схема
С-граф
Структурная схема
Матричное уравнение системы
Понижение порядка матричного
уравнения системы
Уравнение системы
Регрессионный анализ
Рис. 3.9. Обобщенная схема методики моделирования многосвязного объекта
управления методом структурных графов
В течение длительного времени в районе Братска проводились полевые
исследования, в результате которых осуществлялся сбор экспериментальных
данных, характеризующих состояние лесов в различных техногенных зонах.
На основании экспериментальных и литературных данных были выделены
факторы, оказывающие влияние на состояние лесных экосистем:
G – источник загрязнения:
F – уровень загрязнения фтористым водородом;
S – уровень загрязнения оксидом серы SO2;
90
B – уровень загрязнения бензапиреном;
L – расстояние до источника:
L1 - расстояние до источника от 0 до 10 километров;
L2 - расстояние до источника от 11 до 10 километров;
L3 - расстояние до источника от 21 до 30 километров;
L4 - расстояние до источника от 31 до 40 километров;
N – направление от источника загрязнения;
A – возрастная группа (молодняки, средневозрастные, приспевающие);
GC – балл категории состояния;
CP – химический состав хвои;
H – средняя высота;
dH – прирост;
D – средний диаметр.
Схема влияния биогенных факторов на лес приведена на рис 3.10.
Источник загрязнения
Фтористый
водород
Оксид серы
Расстояние до
источника загрязнения
0-10 км
11-20 км
Бензапирен
Направление ветра
91
Северовосточное
Северозападное
Рис 3.10 Схема влияния биогенных факторов на лес
Для оценки качества лесного массива предлагается использовать балл
категории состояния леса (GC), который отражает средний диаметр деревьев
(D), среднюю высоту деревьев (H), средний возраст деревьев (A), количество
накопленных
деревьями
химических
элементов
антропогенного
происхождения (CP).
Согласно санитарным правилам в лесах РФ балл категории состояния
(GC) может принимать следующие значения:
1 – без признаков ослабления;
92
2 – ослабленные;
3 – сильно ослабленные;
4 – усыхающие;
5 – сухостой текущего года (свежий);
6 – сухостой прошлых лет (старый).
Ветровал, бурелом, снеголом учитывают отдельно с указанием времени
их образования.
Для лиственных и хвойных пород применяется единая шкала категории
состояния, различия заключаются в методах оценки балла категории
состояния, обусловленных биологическими особенностями данных пород.
Минимальное значение балла категории состояния (GC) равно 1, при
наличии только здоровых деревьев, а максимальное равно 6, при полном
усыхании древостоя.
Взаимозависимость данных параметров отражена в таблице 24.
Таблица 24 Таблица взаимодействия параметров
G
G
L
N
A
GC
CP
dH
H
D
L
+
N
+
A
+
+
+
GC
CP
dH
H
D
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Для более наглядного представления зависимостей между параметрами
системы возможно построение функциональной схемы. Однако данный этап
не является обязательным при идентификации системы предлагаемым
методом и может быть опущен.
На основании таблицы взаимодействия параметров строится С-граф. Сграф позволяет в наиболее полной форме отразить структурную связь
элементов системы, представить зависимость выходных параметров от
входных.
93
Методика создания математической модели по С-графу подробно изложена в
главе 1. Процесс получения математической модели лесного массива описан
с использованием разработанного программного комплекса S-graph.
_На первом этапе осуществляется ввод исходным данных с
использованием вкладки “Таблица взаимодействия параметров”. Экранная
форма, с введенными параметрами лесного объекта, представлена на рис.
3.10
S-graph
Файл Параметры Справка
Таблица взаимодействия параметров
XXXXXG
G
L
N
A
GC
CP
dH
H
D
L
+
Матрица инциденций
N
+
A
+
+
+
-
-
Функциональная схема
GC
CP
dH
С-граф
H
Матрица к
D
+
+
+
+
+
+
+
+
-
+
+
+
+
+
+
+
+
-
Рис 3.10 Окно программы с активной вкладкой «Таблица взаимодействия
параметров»
Экранная форма с построенным С-графом приведена на рис.3.11. На
рисунках 3.12-3.15 приведены экранные окна программы S-graph с
автоматически построенными матрицей компонент (B), матрицей узлов (A),
матрицей H, матрицей H’.
S-graph
Файл Правка Параметры Справка
Таблица взаимодействия параметров Матрица инциденций Функциональная схема
1
x0
W1
1
x8
1
x9
Структурная схема
С-граф
Матрица компонент Матрица узлов
W5
x16
x17
x14
1
W4
x12
1
x15
x10
W3
x19
x45
W2
x19
W6
x18
x22
x20
1
x21
x36
94
1
x5
x4
x1
x38
W16
x27
x44
W11
W20 x47
x28
1
x2
W10
W9
x29
x40
W21
1
1
x7
1
x25
x42
x37
x46
W8
x23
1
x49
W18
W15
1
x43
W19
x34
x11
1
x3
W14
x24
W13
x48
Рис. 3.11. С-граф лесного объекта, построенный в программе S-graph.
S-graph
S-graph
Файл Параметры Справка
Файл Параметры Справка
Таблица взаимодействия Функциональная схема С-граф МатрКомпонент Матрица узлов H
x0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
x0
x1
x2
x3
x4
x5
x6
x7
x8
x9
x10
x11
x12
x13
x14
x15
x16
x17
x1
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
x2
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
x3
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
x4
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
x5
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
x6
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
x7
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
x8
0
0
0
0
0
0
0
0
1
W1
0
0
0
0
0
0
0
0
x10
0
0
0
0
0
0
0
0
0
0
1
W2
0
0
0
0
0
0
x12
0
0
0
0
0
0
0
0
0
0
0
0
1
W3
0
0
0
0
x14
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
W4
0
0
Таблица взаимодействия Функциональная схема С-граф МатрКомпонент Матрица узлов H
x16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
W5
x18
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
x20
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
Рис. 3.12. Окно программы
S-Graph с матрицей компонент
(B)
x0
1
1
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
x1
0
0
0
0
0
0
0
0
-1
0
0
0
0
0
0
0
0
0
x4
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
-1
0
0
x5
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
1
x6
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
x7
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
x8
-1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
x9
0
0
0
1
1
0
0
0
0
0
0
0
0
0
0
0
0
0
x10
0
-1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
x11
0
0
0
0
0
1
1
1
0
0
0
0
0
0
0
0
0
0
x12
0
0
-1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
H’
x13
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
x14
0
0
0
-1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
x15
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
S-graph
Файл Параметры Справка
Таблица взаимодействия Функциональная схема С-граф МатрКомпонент Матрица узлов H
Таблица взаимодействия Функциональная схема С-граф МатрКомпонент Матрица узлов H
x1
0
0
0
0
0
0
0
0
-1
0
0
0
0
0
0
0
0
0
0
x3
0
0
0
0
0
0
0
0
0
0
0
0
0
0
-1
0
0
0
Рис. 3.13. Окно программы
S-Graph с матрицей узлов (A)
S-graph
Файл Параметры Справка
x0
1
1
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
x2
0
0
0
0
0
0
0
0
0
1
1
1
1
1
0
0
0
0
x2
0
0
0
0
0
0
0
0
0
1
1
1
1
1
0
0
0
0
0
Рис.
x3
0
0
0
0
0
0
0
0
0
0
0
0
0
0
-1
0
0
0
0
x4
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
-1
0
0
0
x5
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
1
1
3.14.
x6
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
x7
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
x8
-1
0
0
W1
W1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
x10
0
0
0
0
0
W2
W2
W2
0
0
0
0
0
0
0
0
0
0
0
Окно
x12
0
0
0
0
0
0
0
0
W3
0
0
0
0
0
0
0
0
0
0
x14
0
0
0
-1
0
0
0
0
W4
0
0
0
0
0
0
0
0
0
0
x16
0
0
0
0
-1
0
0
0
0
0
0
0
0
0
W5
0
0
0
0
x18
0
0
0
0
0
-1
0
0
W6
0
0
0
0
0
0
0
0
0
0
x20
0
0
0
0
0
0
-1
0
0
0
0
0
0
0
0
W7
0
0
0
x22
0
0
0
0
0
0
0
-1
0
0
0
0
0
0
0
0
0
0
0
программы
x0
0
0
0
W1
W1
W2
0
0
W2
W2
0
0
0
W3
95
x1
0
0
1
0
0
0
0
0
0
0
0
0
0
-1
x2 x3
0
0
0
0
-1 0
0
0
0
0
0
0
W11 0
W12 0
0
0
0
0
W13 -1
W9 0
W10 0
0
0
x4
0
1
0
0
0
0
0
0
0
0
0
-1
0
0
x5 x6
0
1
-1 0
0
0
0
0
0
0
0
0
W15 0
W16 -1
0
0
0
0
W17 0
W14 0
0
0
0
0
x7 x48 x42
-1 0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
W20 0
-1
0
0
0
0
0
0
0
0
0
0
-1 0
W19 W21 W18
0
0
0
0
0
0
x22
0
0
0
0
0
0
0
W8
0
-1
0
0
0
0
x14
0
0
0
-1
0
0
0
0
0
0
0
0
0
W4
x16
0
0
0
0
-1
0
0
0
0
0
0
W5
0
0
H’
x18
0
0
0
0
0
-1
0
0
0
0
0
0
0
W6
x20
0
0
0
0
0
0
0
0
-1
0
0
0
W7
0
x16
0
0
0
0
-1
0
0
0
0
0
0
0
0
0
0
0
0
0
x17
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
Рис. 3.14. Окно программы
S-Graph с матрицей H
(до
понижения порядка)
Рис. 3.15. Окно программы
S-Graph с матрицей H’ (после
понижения порядка)
Для данной модели размерность матрицы B равна 50*29, размерность
матрицы A равна 28*50, матрицы H – 28*29, размерность матрицы H’, после
понижения порядка – 14*15.
x0
0
0
0
W1
W1
W2
0
0
W2
W2
0
0
0
W3
x1
0
0
1
0
0
0
0
0
0
0
0
0
0
-1
x2
0
0
-1
0
0
0
W1
1
W1
02
0
W1
3
W9
W1
0
x3
0
0
0
0
0
0
0
0
0
0
-1
0
0
0
x4
0
1
0
0
0
0
0
0
0
0
0
-1
0
0
x5
0
-1
0
0
0
0
W1
5
W1
06
0
W1
7
W1
04
0
x6
1
0
0
0
0
0
0
-1
0
0
0
0
0
0
x7
-1
0
0
0
0
0
W2
0
0
0
0
W1
09
0
x48
0
0
0
0
0
0
0
0
0
0
-1
W2
01
0
x42
0
0
0
0
0
0
-1
0
0
0
0
W1
08
0
x22 x14 x16 x18 x20
x0
0 0 0 0 0
x1
0 0 0 0 0
x2
0 0 0 0 0
x3
0 -1 0 0 0
x4
0 0 -1 0 0
x5
0 0 0 -1 0
x6
0 0 0 0 0 × x7
W8 0 0 0 0
x48
0 0 0 0 -1
x42
-1 0 0 0 0
x22
0 0 0 0 0
x14
0 0 W5 0 0
x16
0 0 0 0 W7
x18
0 W4 0 W6 0
x20
(3.23)
= 0
По матричному уравнению лесного объекта (3.23) составлены уравнения
системы:
W9 ∙ x2 − x3 + W14 ∙ x5 + W19 ∙ x7 + W5 ∙ x16 + W18 ∙ x42 + W21 ∙ x48 = 0
W11 ∙ x2 + W15 ∙ x5 + W20 ∙ x7 − x42 = 0,
где x2 – A, средний возраст, лет;
x3 – GC, балл категории состояния;
x5 – CP, химический состав хвои;
x7 – H, средняя высота, м;
x16 – L, расстояние от источника загрязнения, км;
x48 – D, средний диаметр, см.
96
или
x3 = W9 ∙ x2 + W14 ∙ x5 + W19 ∙ x7 + W5 ∙ x16 + W18 ∙ x42 + W21 ∙ x48
(3.24)
x42 = W11 ∙ x2 + W15 ∙ x5 + W20 ∙ x7
(3.25)
Подставив (3.25) в (3.24), получим:
x3 = W9 ∙ x2 + W14 ∙ x5 + W19 ∙ x7 + W5 ∙ x16 + 𝑊11 ∙ x2 + W15 ∙ x5 + W20 ∙
∙ x7 + W21 ∙ x48
Отсюда, уравнение системы может быть представлено в следующем виде:
x3 = x2 ∙ (W9 + 𝑊11 ) + x5 ∙ (W14 + W15 ) + x7 ∙ (W19 + W20 ) + W5 ∙ x16 +
+ W21 ∙ x48
(3.26)
Так как процесс прироста леса является медленно протекающим, то его
можно рассматривать в стационарном режиме, , т. е =Wi=Ki, так как S=0, Т
x3 = a0 ∙ x0 + a2 ∙ x2 + a5 ∙ x5 + a16 ∙ x16 + a7 ∙ x7 + a48 ∙ x48,
(3.27)
где a2 = 𝑊9 + 𝑊11 ,
a5 = 𝑊14 + 𝑊15 ,
a7 = 𝑊18 + 𝑊20 ,
a16 = 𝑊5 ,
a48 = 𝑊21 ,
x2 – A, средний возраст;
x3 – GC, бал категории состояния;
x5 – CP, химический состав хвои;
x7 – H, средняя высота, м;
x16 – L, расстояние от источника загрязнения, км;
x48 – D, средний диаметр, см.
Уравнение (3.27) может быть представлено в виде уравнения
регрессии:
97
i=6
y = ∑ a i ∙ bi ,
i=0
где y=x3
ai – вектор коэффициентов,
xi – вектор параметров.
Для нахождения коэффициентов уравнения (3.27) ai использован метод
наименьших квадратов с использованием матричного подхода. Данный
метод заключается в подборе такого вектора коэффициентов, при котором
сумма квадратов отклонений рассчитанных значений неизвестных
параметров от реальных значений минимальна.
A = [X ′ ∙ X]−1 ∙ X ′ ∙ Y
(3.28)
где A – матрица коэффициентов при xi
X’ – транспонированная матрица параметров
Y – матрица столбец выходных параметров
Методом наименьших квадратов (3.28) найдены коэффициенты
регрессии с использованием статистических данных из таблицы 25.
Таблица 25 Средние таксационные показатели
№
пробы
Балл
категории
состояния
y
GC
x0
Средний
возраст,
лет
x2
Химический Расстояние
состав хвои
до
фтор
источника
x5
загрязения,
км
x16
A
CP
98
L
Средняя
высота,
м
x7
Средний
диаметр,
см
x48
H
D
1
2
3
4
5
6
2,8
1,9
1,7
1,6
1,5
1,3
1
1
1
1
1
1
55
65
70
72
72
74
68,23
42,31
36,19
35,98
35,01
34,76
10
20
30
40
50
60
13,2
14,9
17,7
17,9
19,1
19,7
20,3
22,3
24,5
24,3
25
25,5
Данные строки 6 не использовались при нахождении коэффициентов
регрессии и служат для проверки результатов.
Модель лесного объекта после вычисления коэффициентов регрессии
примет вид:
x3 = 4,56 − 0,00299 ∙ x2 + 0,01335 ∙ x5 − 0,0203 ∙ x16 + 0,27 ∙ x7 −
−0,298 ∙ x48
(3.29)
Относительная погрешность вычислений 0,37%.
Для нахождения параметров качества прироста лесного массива
использован симплекс-метод.
Задача оптимизации процесса прироста леса: найти максимальное
значение целевой функции. Максимальная жизнестойкость деревьев
характеризуется баллом категории состояния, равным 1.
Целевая функция имеет вид:
x3 = 4,56 − 0,00299 ∙ x2 + 0,01335 ∙ x5 − 0,0203 ∙ x16 + 0,27 ∙ x7 −
−0,298 ∙ x48 → max
(3.30)
Введем ограничения на параметры системы:
0 ≤ 𝑥3 ≤ 5
30 ≤ 𝑥2 ≤ 100
1,26 ≤ 𝑥5 ≤ 28,68
14,7 ≤ 𝑥7 ≤ 19,7
11 ≤ 𝑥16 ≤ 61
14 ≤ 𝑥48 ≤ 40 }
В результате решения уравнения (3.30) относительно ограничений
получим:
99
x3 = 4,56 − 0,00299 ∙ x2 + 0,01335 ∙ x5 − 0,0203 ∙ x16 + 0,27 ∙ x7 − 0,298 ∙
∙ x48 → max или
x3 = 4,56 − 0,00299 ∙ x2 + 0,01335 ∙ x5 − 0,0203 ∙ x16 + 0,27 ∙ x7 − 0,298 ∙
∙ x48 = 1
x2 – A, средний возраст = 50,01 лет;
x3 – GC, бал категории состояния = 1;
x5 – CP, химический состав хвои =34;
x7 – H, средняя высота = 15 м;
x16 – L, расстояние от источника загрязнения =50 км;
x48 – D, средний диаметр =23,15 см.
3.4.2 Порядок выполнения работы
1. По формуле (3.28) с использованием данных таблицы 25 рассчитать
коэффициенты и получить уравнение стационарного режима (3.29). При
расчете воспользоваться данными только пяти верхних строк. Данные строки
шестой использовать в дальнейшем для определения относительной
погрешности модели.
Погрешность модели S% =
y6 − yрасч.
∙ 100%
y6
(3.31)
3.4.3. Задание
1. Исследовать величину относительной ошибки модели
последовательном исключении контролируемых параметров.
при
В уравнении (3.29) будем убирать поочередно по одному параметру xi (i=x2,
x5, x7,x16, x48),
На каждом шаге уравнение (3.29) будет иметь вид:
x3 = 4,56 − 0,00299x2 + 0,01335x5 + 0,27x7 − 0,0203x16 − 0,298x48 −
− (𝑥i ),
где xi записывается в скобках со своим знаком в уравнении (3.29). Например,
x2=0, тогда
x3 = 4,56 + 0,01335x5 + 0,27x7 − 0,0203x16 − 0,298x48
100
2. исследовать информационную значимость параметров.
Воспользуемся шестой контрольной строкой таблицы 26 и найдем значение
x3 при x2=0
x36 = x3 + 0,00299x2 = 1,3 + 0,00299 ∙ 74 = 1,3 + 0,22 = 1,52
На первом шаге должно быть x36 = 1,52.
Возврашаемся к формуле (3.28), составляем матрицу X из четырех столбцов
таблицы 25 и находим коэффициенты регрессии для уравнения
x3 = a0 x0 + a5 x5 + a16 x16 + a7 x7 + a48 x48
(332)
(отсутствует параметр x2)
В уравнение (3.32) подставляем параметры шестой строки таблицы 2 и
находим расчетное значение x36 расч.
Относительную ошибку модели при исключении x2 находим по формуле
𝛿𝑥2 % =
x36 − x36 расч.
x36
∙ 100
Расчеты проводим для пяти параметрам xi и, по величинам ошибок даем
качественную оценку информативности параметров.
3.4.4. Контрольные вопросы
1. Какие параметры модели являются наиболее информативными.?
2. С помощью каких параметров можно осуществлять прогноз состояния
лесного массива.?
3. Какими параметрами можно управлять процессом состояния леса?
Глава 4 Моделирование производственных процессов.
4.1. Моделирование задачи оптимального календарного
планирования серийного производства.
Цель работы. Ознакомить студентов с методикой оптимального
календарного планирования, провести исследование и решить задачу по
оптимизации процесса.
101
4.1.1 Методика выполнения работы
Среди различных организационно-экономических, математических и
технических вопросов, которые приходится решать на этапе проектирования,
создание математической модели оптимального календарного планирования
серийного производства и выбор приемлемого способа ее машинной
реализации занимают важное место.
От календарного плана-графика работы серийного цеха или участка
зависят ритмичность выпуска продукции, длительность простоев
оборудования, уровень затрат на переналадку оборудования, объем
незавершенного производства, длительность производственного цикла,
себестоимость изготовления изделий и, следовательно, экономика данного
подразделения. Очень важно уметь находить параметры оптимального календарного плана, который, с учетом сложившейся производственной
обстановки, определяет наиболее эффективный путь выполнения заданной
производственной программы.
Исследованиями установлено, что увеличение размера партии
обрабатываемых деталей ведет к повышению производительности труда,
благодаря сокращению доли подготовительно-заключительного времени,
приходящегося на одну деталь, и совершенствованию производственных
навыков рабочего.
С другой стороны, увеличение размера партии приводит к увеличению
межоперационных оборотных заделов и, как следствие, к росту издержек от
пролеживания деталей между операциями.
При расчете партии запуска деталей необходимо учитывать размеры
свободных площадей для хранения изделий,
стойкость инструмента, установленный порядок обеспечения серийного
участка металлом и т.д.
В условиях действия перечисленных факторов и производственных
ограничений выбор оптимального размера партии или количества запусков в
обработку по каждой детали за определенный календарный период времени
представляет весьма сложную задачу.
Наиболее простые методы расчета размера партии основаны, как
правило, на использовании какого-либо одного нормативного показателя,
например допустимой доли подготовительно-заключительного времени по
отношению к штучному на всю партию деталей, либо показателя
специализации рабочих мест.
Другой подход заключается в том, что оптимальный размер партии
находится из условия минимизации величины зависящих от него
производственных затрат. Значительную часть обычно составляют затраты
102
на переналадку оборудования и издержки от связывания оборотных средств в
незавершенном производстве. Поэтому ограничимся лишь этими
составляющими. Тогда функция-критерий для выбора оптимального
календарного графика имеет вид:
C=P+Z,
(4.1)
где Р - суммарные затраты на переналадки, a Z - издержки от пролеживания
междуоперационных оборотных заделов по всем деталям и для всех станков
за период Т, на который составляется данный план-график.
Будем считать затраты на переналадку оборудования прямо
пропорциональными суммарному времени переналадок:
,
(4.2)
P ατ Σ
где τ Σ - продолжительность всех переналадок в течение периода
планирования Т; - стоимость часа наладочных работ.
Издержки от пролеживания межоперационных оборотных заделов
прямо пропорциональны величине заделов:
,
(4.3)
Z βλ Σ
где λ Σ -суммарная величина заделов по всем деталям в течение
периода
(тысяч
штук);
β - стоимость хранения 1000 деталей в
течение одного часа.
С учетом (4.2), (4.3) уравнение (4.1) можно записать:
C ατ Σβλ Σ
(4.4)
В серийном производстве на m однотипных станках изготовляется
последовательно n деталей. При переходе с выпуска одной детали на выпуск
другой детали производится переналадка станка. Задача сводится к тому,
чтобы построить такой календарный график обработки деталей, который
позволил бы свести к минимуму издержки производства при условии
обеспечения заданного темпа выдачи готовых деталей на конвейер, т.е.
необходимо минимизировать функцию-критерий (4.4).
Для производственного участка основными параметрами календарного
графика являются: последовательность обработки деталей и количество
запусков i-той детали в обработку в течение планового периода Т. Выбор
последовательности обработки деталей определяет время переналадок в
течение одного цикла.
Построим схему возможных очередностей изготовления деталей в виде
направленного графа. Узлам графа присвоим номера деталей, а дугам значение времени переналадки оборудования при переходе с изготовления
предыдущей детали к последующей. Время переналадки оборудования
103
заранее известно для любой очередности изготовления и его значения
сведены в квадратную матрицу:
τ12 τ13 τ1n
τ τ τ
23
2n
21
τ ij τ 31 τ 32 τ 3n ,
τ n1 τ n2 τ n3
где τ ij - время переналадки станка при переходе с изготовления
i-той детали на изготовление j-той детали.
(При i=j, τ ij = , что имеет смысл при машинном поиске критического
графа, т.к. критический путь не должен содержать переналадок оборудования
при изготовлении одной и той же детали).
Критическим путем мы будем считать такой путь в графе, на котором
достигается минимум суммы времени переналадок.
Выбрав произвольную деталь, которую необходимо изготовить в
первую очередь (а иногда и деталь, которую нужно изготовить в последнюю
очередь), начертим граф, содержащий всевозможные комбинации
очередности изготовления заданной совокупностей деталей. Затем при
помощи матриц переналадок выберем критический путь по минимуму суммы
времени переналадок, т.е. найдем такую очередность изготовления деталей,
при которой затраты времени на переналадку оборудования будут
минимальны.
Следует учитывать, что продолжительность всех переналадок в течение
периода Т прямо пропорциональна количеству запусков в производство i-той
детали за время планового периода Тц.
(4.5)
τ Σ τ êð K ,
где τ êð - критический путь в графе переналадок; К - количество
запусков i-той детали в производстве за время планового периода Т.
Рассмотрим зависимость суммарной величины заделов от количества
(К) запусков i-той детали в производство. Следует заметить, что затраты на
хранение деталей пропорциональны не только количеству деталей, но и
времени их хранения, т.е.
γi
λ imax Tö
K
2
(4.6)
Отсюда следует рассматривать задел не только как количество
104
изготовленных деталей, но и учитывать время пролеживания деталей.
Суммарный задел получим:
n
γΣ γi
t 1
λ imax Tö
K,
2
λ imax Vim t i ,
где
ti
Wiö
,
Vim
(4.7)
(4.8)
(4.9)
где Wiö - потребность i-той детали в течение цикла, полученную как
Wi
(4.10)
,
K
где Wiö - потребность i-той детали в течение периода планирования.
Отсюда получим:
Wi
(4.11)
ti
,
KVim
W
(4.12)
λ max i ,
K
T
Принимая во внимание, что Tij , из (4.7) получили:
K
n WT
T n
(4.13)
λΣ i
Wi .
i 1 2K
2K i1
Подставляя (4.5) и (4.13) в (4.4), получим:
βT n
(4.14)
C ατ êð K
Wi
2K i 1
выражение для критерия функции.
4.1.2 Порядок выполнения работы
Известно, что на каждом станке выпускаются детали четырех видов.
Дана матрица переналадок:
Wiö
τ12 τ13 τ14
τ τ τ
21
23
124
τ ij
τ 31 τ 32 τ 34
τ
τ
τ
41 42 43
α = 17,5 руб/час - стоимость часа наладочных работ; β =14,8 руб/час стоимость хранения 1000 деталей в течение одного
часа; Т = 24 часа;
V1=1000шт.,
W1=128000 шт.,
V2=1550шт.,
105
V3=2200 шт.,
V4=1100шт.,
W2=216000шт.,
W3=311000шт.,
W4=152000 шт.,
i
где Vi (Vm
) - производительность одного станка при изготовлении i-той
детали.
1. Определяем интенсивность потребления i -той детали:
W
Voi i
T
128000
5350 шт/час;
24
216000
Vo2
9000 шт/час;
24
3110001
Vo3
13000шт/час;
24
152000
Voi
6300 шт/час.
24
Зная производительность каждого станка, определим их количество:
V
m oi ,
Vi
Vo1
Примечание. Скобки [ ] означают,
быть максимально целочисленное значение
что значение дроби должно
9000
5350
; m2
m1
6
1550 6 ;
1000
13000
6300
m3
6
;
m
4
1100 6 .
2200
Следовательно, на данном производственном участке необходимо
иметь 24 станка для обеспечения производственного задания.
2. Согласно изложенной выше методике критический путь находится в
такой последовательности:
Каждый станок выпускает детали четырех видов. Примем, что задел
деталей N2 очень мал, а задел деталей N1 велик. Деталей других видов
имеется достаточное количество, чтобы допустить любую очередность их
производства. Требуется построить схему очередности производства всех
четырех деталей в виде графа и найти критический путь, при котором
достигается минимум суммы времени переналадок. Пусть дана матрица
переналадок:
106
0,1
τ ij
0,3
0,3
0,5
0,4
0,2
0,2
0,3
0,5
0,6
0,1
.
0,4
Поскольку задел детали N2 очень мал, то производство ее следует
начать как можно раньше, поэтому узел, отражающий производство детали
N2, берем за исток графа. Если задел детали N1 велик, то производство ее
целесообразно вести в последнюю очередь, поэтому узел, отражающий
производство этой детали, берем за сток графа.
Тогда схема очередности производства деталей на i-том
станке будет иметь вид (рис 4.1)
3
0,4
4
0,3
0,3
2
1
0,1
Дугам
переналадок,
путей графа:
4
3
0,5
0,3
Рис.4.1. Граф очередности
графа присваиваем значения, взятые из матрицы
и находим сумму значений дуг для каждого из
τ 2341 τ 23 τ 34 τ 41 0,3 0,4 0,3 1,0
τ 2341 τ 24 τ 41 τ 31 0,1 0,5 0,3 0,9
Из полученных результатов выбираем минимальную сумму. В данном
случае последовательности 2,4,3,1 - деталь, следовательно, организуя
очередность 2,4,3,1, мы добьемся минимума суммы времени переналадок для
данной ситуации наличия заделов.
Если же величина заделов одной из деталей незначительно
отличается от заделов других деталей, то порядок их изготовления не столь
важен
и
диктуется
лишь
требованием
минимума
суммы времени переналадок. В этом случае схема очередности
производства деталей будет иметь вид графа с несколькими
строками.
4.1.3 Задание
107
На станке изготавливаются детали четырех видов. Имеется очень
малый задел детали N3. Деталей других видов имеется достаточное
количество, чтобы принять любую очередность производства. Требуется
построить схему производства деталей в виде графа с несколькими стоками
(рис.2) и найти критический путь, при котором достигается минимум
времени переналадок.
Задана матрица переналадок (таблица 25)
Таблица 25 Матрица переналадок оборудования
Вариан-
ты
1
τ
τ14
2
∞ 05 0,2 0,6
:
0,1 ∞ 0,4 0,4
:
[
] [
0,2 0,3 ∞ 0,3
:
0,4 0,2 0,1 ∞
:
3
:
1,5 0,8
:
1,2 0,6
] [
:
∞ 2,0
:
1,7 ∞
06 2,0
:
0,8 0,9
:
] [
∞ 1,5
:
2,0 ∞
:
4
1,2 2,0
:
1,5 1,6
:
] [
∞ 0,9
:
1,8 ∞
:
5
0,3 1,4
0,6 1,2
]
∞ 0,4
0,5 ∞
Примечание. Значение коэффициентов матрицы переналадок задаётся в
вариантах 2, 3, 4, 5 путем замены 3 и 4 столбцов матрицы переналадок 1-го
варианта.
1. Строится граф очередности производства деталей (ри. 4.2)
2
1
4
4
1
3
22
2
4
1081
1
4
2
Рис 4.2 Граф очередности производства деталей
Пользуясь графом (рис.4.2), находим пути
τ 3124 τ 31 τ12 τ 424 0,3 0,5 0,1 0,9
τ 3142 τ 31 τ14 τ 42 0,3 0,6 0,2 1,1
τ 3214 τ 32 τ 21 τ14 0,4 0,1 0,6 1,1
τ 3241 τ 32 τ 24 τ 41 0,4 0,1 0,3 0,8
τ 3412 τ 23 τ 41 τ12 0,4 0,3 0,5 1,2
τ 3421 τ 34 τ 42 τ 21 0,4 0,2 0,1 0,7
Значение τ 3421 0,7 является минимальным, следовательно, путь 3 4 2 1
является критическим.
2. Рассмотрим функцию (4.14)
C ατ êð K
а
βT n
Wi
2K i 1
в
Функция "с" состоит из двух слагаемых "а" и "в". Первое
слагаемое представляет собой прямую, проходящую через начало координат,
а
второе
слагаемое
гиперболу.
При
сложении
их
получим
кривую,
имеющую
явно
выраженный
минимум
(рис.4.3).
Функция имеет экстремум, если существует ее первая производная.
Для нахождения координаты экстремума первую производную функции
(4.14) необходимо приравнять к нулю, т.е.
βT n
C ατ êð K
Wi
2K i 1
dC
βT n
1
ατ êð
Wi 2 ;
dK
2 i1
K
n
βT
ατ êð
Wi 0
2K 2 i1
Отсюда
K
βT n
Wi
2α êð i 1
(4.15)
Принимаем лишь целочисленные значения "К". Для определения
109
минимума функции (14) находим ее вторую производную и показываем, что
ее значение положительно, т.е.
d 2 C βT n
(4.16)
Wi 0
dK 2 K 3 i1
тогда С(К) имеет минимум.
3. Решение функции C (K) проводится при следующих параметрах
предприятия (Таблица 26)
Таблица 26. Технические характеристики производственного процесса
предприятия.
Варианты
Параметры
1
2
3
4
5
α
β
T
W1
W2
W3
W4
V1
V2
V3
V4
200
120
24
100000
200000
180000
160000
1000
1200
1400
1600
180
100
24
300000
340000
400000
500000
1500
2000
2500
3000
240
80
24
40000
30000
20000
10000
600
400
500
200
150
140
12
14000
12000
10000
8000
200
200
100
100
300
150
12
200000
250000
50000
70000
1500
2500
1000
1000
По формуле (4.15) при заданных характеристиках производства находим
величину Kк, при котором получаем минимум производственных затрат. По
формуле (4.16) величина
𝑑2 𝑐
𝑑𝑘 2
> 0.
Относительно точки экстремума Kк выбираем по три точки вправо и влево от
Kк и строим график функции C=f(k) по трем составляющим компонентам.
C
c
a
O
110
Kк
K
Рис. 4.3 График функции критерия
Результаты представить в виде таблицы 27 и графика (см. ри. 4.3.)
Таблица 27 График функции производственных затрат
к
Kк-2500
Kк-2000
Kк-1000
Kк
Kк+1000 Kк+2000 Kк+3000 Kк+4000
a
b
c
4.1.4 Контрольные вопросы.
1. Выяснить зависимость экстремума функции затрат от типа производства
(массового, мелкосерийного и смешанного)
2. Разработать комплекс мероприятий (рис 4.3)
– снижение затрат от составляющей a;
– снижение затрат от составляющей b;
– обеспечить с=const.
4.2. Оптимизация производственного плана методом линейного
программирования
Цель работы: Изучить и исследовать метод линейного программирования и
исследовать производственный процесс.
4.2.1. Методика выполнения работы.
Многочисленные задачи оптимального планирования и управления
сводятся к моделям линейного программирования.
Линейное программирование изучает задачи нахождения оптимального
(максимального или минимального) значения линейной целевой функции
при линейных ограничениях на параметры управления.
В общем виде задачу линейного программирования (ЗЛП)
можно сформулировать следующим образом: найти минимальное значение
111
целевой функции
(4.17)
L( x) c1x1 c2 x 2 ... cn x n
при ограничениях в виде равенств
dX1 + dX2 + ⋯ dn Xn = b1
dX + dX2 + ⋯ dn Xn = b2
(4.18)
{ 1
dX1 + dX2 + ⋯ dn Xn = b3
dX1 + dX2 + ⋯ dn Xn = bm
и неравенств
X1>0;X2>0;...Xn>0
(4.19)
где C1……Cn; d, d…..d; b.....bm - фиксированные числа, которые могут быть
положительными, отрицательными или равными нулю.
X={X1…..Xn}
Запись ограничений задачи в виде равенств (4.18) является наиболее
общей. Если условия задачи задаются в виде неравенств, то их можно с
помощью введения дополнительных переменных привести к равенствам.
Например, пусть система ограничений задачи состоит из двух
неравенств с противоположными знаками:
2X1 + X2 ≤ 3
}
X1 − X 2 ≥ 1
и из условий неотрицательности переменных X1 0;X2 0.
Путем добавления дополнительных переменных в неравенства системы
ограничений можно перейти к равенствам:
2X1 + X2 + X3 = 3
}.
X1 − X 2 − X 4 = 1
где Х3 и Х4 - дополнительные переменные, численно равные
неотрицательной разности между левыми и правыми частями заданных
неравенств. Число переменных при таком сведении увеличивается на число,
равное количеству неравенств в исходной системе ограничений.
Простым примером можно свести такие ЗЛП с максимизируемой
целевой функцией к эквивалентной задаче на нахождение минимума.
Действительно, пусть целевая функция задачи имеет вид
L1 X C1' X1 C'2 X2 ... C'n Xn max .
Изменим знак коэффициентов C 'j , умножив L1 X на -1 и рассмотрим
задачу с целевой функцией:
L X (C1' X1 ) (C'2 X 2 ) ... (C'n Xn ) min .
Очевидно, что при замене целевой функции
L1 X íà LX
оптимальное решение задачи не изменится, причем для этого оптимального
решения – план X : LX L1 X
Следовательно, любую ЗЛП можно привести к виду (4.17) ÷ (4.19).
112
Одним
из
наиболее
распространенных
методов
ЗЛП являются симплекс-метод.
4.2.2. Порядок выполнения работы.
решения
Поясним коротко этот метод на примере решения задачи об
оптимальном использовании оборудования:
Столярный цех лесопромышленного комплекса выпускает три вида
продукции: столы Р1, шкафы Р2 и стулья РЗ, которые производятся с
использованием четырех видов оборудования S1, S2, S3, S4. Цех имеет
оборудование S1 в количестве 15 штук, S2 - 10 штук, S3 -20 штук и S4 - 15
штук. Нормы затрат оборудования на выпуск 1 тыс. штук продукции каждого
вида в месяц приведены в таблице 28.
Таблица 28. Данные лесопромышленного комплекса
Вид оборудо- Нормы затрат оборудования на 1000 штук продукции в
вания
месяц
P1
Р2
Р3
S1=15
3
1
1
S2=10
1
2
1
S3=20
2
0
2
S4=15
0
5
1
Каждая тысяча штук продукции P1 дает прибыль 2000 руб.; Р2 - 3000
руб., Р3 - 1000 руб. Требуется определить, какое количество продукции
каждого вида: столов Р1, шкафов Р2 на имеющемся оборудовании должен
производить цех в планируемый период (месяц), чтобы получить
максимальную прибыль.
Критерием оптимальности при решении этой задачи будет максимум
прибыли при ограничениях по оборудованию.
Пусть
X1 - (тыс. штук) планируемый к выпуску объем продукции P1 (столы);
Х2 - (тыс. штук) планируемый к выпуску объем продукции Р2 (шкафы);
Х3 - (тыс. штук) планируемый к выпуску объем продукции Р2 (стулья).
Сформулируем математическую постановку нашей задачи (по аналогии
с (4.17) ÷ (4.19)). Основная цель - выпуск такого количества конечной
продукции, чтобы прибыль его была максимальной. Следовательно, целевая
функция имеет вид:
L 0 X 2X1 3X 2 X 3 max .
При производстве столов (X1) на оборудовании S1 за месяц
используется 3X1 единиц оборудования S1, шкафов Х2 - 1. Х2 единиц
оборудования S1, стульев (Х3) - 1. Х3 единиц оборудования S1. Общие
113
затраты оборудования S1 на производство всех видов продукции столярного
цеха: Pi, P2, Р3 - не должны превышать реальные запасы, т.е.
3X1+X2+X3≤ 15
Аналогично, общие затраты оборудования S2, S2, S4 при
функционировании
цеха
в
соответствии
с
планом X = (Х2 ,Х2,
Х3) не должны быть больше имеющегося в наличии количества
оборудования:
Х1+2Х2+Х3≤10
2Х2+0Х2+2Х3≤20
0Х1+5Х2+Х3≤15
Учитывая физическую сущность переменных Xi, планируемый к
выпуску объем продукции не может быть отрицательным, запишем:
X1 ≥0; Х2 ≥0; Х3≥0.
Теперь можно сформулировать математическую подготовку задачи:
найти такие X1 ≥0; Х2 ≥0; Х3≥0,
(4.20)
чтобы достигался максимум целевой функции
L0( X ) = 2Х1 + ЗХ2 + Х3 → max
(4.21)
при выполнении следующих ограничений:
3X1 + X2 + X3 < 15
X1 + 2X2 + X3 < 10
(4.22)
}
2X1 + 0X2 + 2X3 < 20
0X1 + 5X2 + X3 < 15
Чтобы привести нашу ЗЛП к виду (4.17) ÷ (4.19), необходимо:
1. Выражение максимума целевой функции заменить эквивалентным
выражением минимума целевой функции.
2. С целью получения равенств в системе ограничений
ввести дополнительные переменные в имеющиеся неравенства.
3. Ввести дополнительные переменные в выражение целевой функции
с нулевыми коэффициентами. Тогда математическая постановка задачи будет
иметь вид:
L0( X )→ max
(4.23)
Найти такие Х1÷ 7 ≥0,
чтобы достигался минимум целевой функции
L( X )= –2Х1 – ЗХ2 – Х3 – 0Х4 + 0Х5 + 0Х6 + 0Х7 → min (4.24)
при выполнении ограничений
3X1 + X2 + X3 + X4 = 15
X1 + 2X2 + X3 + X5 = 10
(4.25)
}
C2 X1 + 0X2 + 2X3 + X6 = 20
0X1 + 5X2 + 2X3 + X7 = 15
Если положить равными нулю переменные X1, X2, Х3, то можно
114
определить положительные значения переменных
X 40 15; X 5 0 10; X 60 20; X 70 15.
Эти значения переменных
X1 0 0, X 20 0, X 3 0 , X 40 10, X 5 0 10, X 60 20, X 70 15
можно взять в качестве начального плана (индекс, записанный сверху в
скобках, означает номер плана). Полученный план обладает тем свойством,
что число его переменных, отличных от нуля, равно числу равенств в
системе ограничений задачи (6). Такой план называется опорным:
X 0 X1 0, X 2 0, X 3 0, X 4 15, X 5 10, X 6 20, X 7 15
Переменные X1, Х2, Х3 называются свободными переменными, а
переменные, которые вычисляются после приравнивания свободных
переменных
к
нулю,
называются
базисными.
Суть симплексного метода состоит в том, что при решении задачи
осуществляется
целенаправленное
движение
по
опорным
планам до
нахождения оптимального
решения. Для
каждого
опорного плана целевая функция изменяется. С каждым новым
переходом значение ее приближается к оптимальному. На каждой итерации
метода лишь одно из свободных переменных увеличивается, а базисные
убывают, причем одна из них обязательно обращается в нуль. При этом
значения базисных переменных остаются отрицательными. Получается
новый комплект базисных и свободных переменных. Полученный в
результате каждой итерации новый опорный план проверяют на
оптимальность по определенным критериям. Разработаны различные
интерпретации симплексного метода для решения различных задач
планирования и управления, в том числе разработана форма, удобная для
ручных вычислений.С развитием вычислительной техники получили быстрое
развитие методы решения ЗЛП на ВМ.
4.2.3. Задание
1. Ознакомиться с настоящей инструкцией и содержанием задания.
2. Подготовить исходные данные для решения полученного варианта задания
об оптимальном использовании оборудования, представленного в таблице 29
Таблица 29. Исходные данные об использовании оборудования.
Варианты
Вид
оборудования
1
2
3
115
4
S1
S2
S3
S4
Нормы затрат
на
на 1000 штук
продукции
10
20
16
12
24
10
14
8
𝑃1 𝑃2 𝑃3
𝑃1 𝑃2 𝑃3
4 6 10
8 20 10
2 5 12
12 14 8
3 2 14
16 30 12
1 8 16
20 36 16
Сформулировать математическую постановку
(4.23)÷(4.25).
30
10
15
20
40
20
10
60
𝑃1 𝑃2 𝑃3
40 20 30
50 10 12
30 3 18
20 4 14
своего варианта
𝑃1 𝑃2
24 10
18 12
12 6
8 14
задачи в
𝑃3
20
14
10
9
виде
Ввести исходные данные, и симплекс-методом в системе Math Card решить
задачу
3. Записать решения задачи.
4.2.4 Контрольные вопросы.
1. Сформулируйте в общем виде ЗЛ.П.
2. Сформулируйте суть симплексного метода.
3. Каким методом можно решить данную задачу?
4.3. Моделирование систем массового обслуживания.
Цель работы Изучить методы организация планирования и управления
системами массового обслуживания.
4.3.1. Методика выполнения работы.
Существует большое число процессов, для которых характерна следующая
общая структура (рис.1)
очереди
входящий
поток
система
(пункты)
обслуживания
выходящий
поток
Рис. 1. Структурная схема системы массового обслуживания
В совокупность пунктов, называемую системой обслуживания,
116
поступают через некоторые промежутки времени объекты - входящий
поток, которые подвергаются там соответствующим операциям обслуживанию и затем покидают систему - выходящий поток, освобождая
место для следующих объектов.
Промежутки времени, через которые поступают объекты и время
обслуживания, как правило, носят случайный характер. При массовом
поступлении объектов в системе обслуживания могут возникнуть очереди.
Процессы массового обслуживания типичны для связи (телефон,
телеграф, почта), транспорта (воздушные, наземные и морские перевозки),
культурно-бытовых (театры, магазины, городское сообщение, поликлинники)
и производственных процессов (ремонт и обслуживание оборудования,
сборочные линии).
Независимо от конкретной природы и характера объектов,
поступающих в систему обслуживания, их называют требованиями (или
заявками).
Процессы массового обслуживания изучаются с целью их
рациональной
организации
(обеспечение
наибольшей
пропускной
способности при возможно меньших затратах времени и материальных
ресурсов) или выявления закономерностей тех явлений природы, для
которых характерны подобные процессы.
Пусть на систему обслуживания, состоящую из “m” одинаковых
каналов (пунктов), поступает простейший поток требований. При наличии
хотя бы одного свободного канала немедленно начинается обслуживание, а
если все каналы заняты, требование становится в очередь. Отметим: время
обслуживания и время ожидания подчиняются экспоненциальным законам.
Обозначим через Si состояние системы, в которой занято ровно i
каналов и очереди нет (i=0, 1,..., m).
So - состояние, при котором все каналы свободны. При im образуется
очередь, и система может находиться в состояниях Sm+r, где r- число
требований в очереди (r=1, 2, .....). Если на длину очереди не накладывается
ограничений, то r может быть сколь угодно большим, и система имеет
потенциально неограниченное число состояний. Пренебрегая возможностью
“перескока” системы через состояние за сколь угодно малое время t, можно
считать, что система за время t либо остается в прежнем состоянии, либо
переходит в соседнее.
Обозначим через Pi(t) вероятность того, что в момент времени t
система находится в состоянии Si(i=0, 1, 2,...., n). Очевидно, для любого
момента времени t сумма вероятностей состояний для всей системы
(нормированное условие)
117
Pi(t) 1.
i 0
В момент времени t система находится в состоянии S1, S2, ......, Sn,
которые образуют полную систему уравнений. Задача состоит в том, чтобы
определить вероятности состояний системы P0(t), P1(t), P2(t),.... Pn(t) как
функции времени. Этот процесс описывается системой дифференциальных
уравнений, называемых уравнениями Колмогорова. При составлении этих
уравнений удобно воспользоваться графом состояний, вершины которого
соответствуют состояниям, а дуги - возможным переходам из состояния в
состояние. Для системы массового обслуживания граф состояний показан на
рис.2.
Рис.4.5. Граф состояний системы
Зафиксируем время t и найдем вероятность Pk (t + t) того, что в
момент t + t система будет в состоянии Sk_. Так как система может
оставаться в прежнем состоянии или переходить только в соседние
состояния, то
Pk (t + t) = P(A) + P(B) + P(C)
(4.26)
где А, В, С - несовместные состояния. Событие А означает, что система за
время t не изменила своего состояния S k , а события В и C означают, что
переход в S k произошел соответственно из состояний S k-1 и S k+1 .
Пусть система в момент t находилась в состоянии S i и вероятность
того, что за время t она перейдет в состояние S i , равна Pi j (t). Величину
Pij (t)
λi j lim
Δt 0
Δt
(4.27)
называют плотностью вероятности перехода. При достаточно малом t
имеет место приближенное соотношение
Pi j(t) i j t
.
(4.28)
Очевидно, вероятность того, что система за время t не перейдет из
состояния i в состояние j, выражается как
1 - Pi j (t) 1 - i j t
.
(4.29)
Выразим вероятность событий А, В, С, (1) через вероятность состояний
и плотности вероятностей перехода (членами высших порядков малости по
сравнению с t пренебрегаем):
P(A) Pk (t) (1-k, k-1 t)(1-k, k+1 t) Pk (t) [1-(k, k-1 + k, k+1 ) t;
118
P(B) Pk -1(t) k, k-1 t;
P(C) Pk +1(t) k, k+1 t;
на основании этих соотношений имеет
P k (t+t) = Pk [1- (k, k-1+k, k+1 )t]+Pk -1(t) k, k-1 t+Pk +1(t) k, k+1 t;
или
Pk (t Δt) Pk (t)
λ k 1,k Pk 1 (t) (λ k,k 1 λ k,k 1 )Pk (t) λ k 1,k Pk 1 (t).
Δt
Переходя к пределу при t 0, получаем дифференциальное уравнение
относительно производной вероятности k-го состояния (для простоты,
аргументы t вероятностей состояний опускаем):
dPk
λ k 1,k Pk 1 (λ k,k 1 λ k,k 1 )Pk λ k 1,k Pk .
dt
(4.30)
Записав аналогичные выражения для всех состояний, получаем систему
дифференциальных уравнений Колмогорова.
Систему уравнений Колмогорова легко записать непосредственно из
размеченного графа системы, в котором в каждой дуге приписан вес, равный
соответствующей плотности вероятности перехода. В соответствии с рис. 4.6
легко вывести простое правило.
Рис. 4.6. Граф состояний переходов системы
Производная вероятностей k-го состояния равна сумме членов, каждый
из которых представляет произведение веса дуги, инцидентной k-й вершине,
на вероятность того состояния, к которому она направлена. При этом вес
дуги принимается отрицательным, если дуга направлена от k-й вершины, и
положительным, если дуга направлена к k-той вершине.
Для составления уравнений Колмогорова необходимо определить
плотности вероятностей переходов и разметить граф системы (рис. 4.7).
Рис. 4.7 Размеченный граф системы
Вероятности перехода Pi, i+1 из состояния i в “старшее” состояние i+1
зависят исключительно от потока требований:
119
Pi, ,i+1(t) 1- (1 - t ) = t .
Отсюда i, i+1 = , и всем дугам графа, направленным от вершины Si, к
вершине Si+1 , приписываем веса, равные интенсивности потока требований
.
Переход в младшее состояние обуславливается исключительно
освобождением каналов обслуживания. При наличии только одного канала
плотность вероятности перехода в младшее состояние равна интенсивности
обслуживания . Если в обслуживании занято i каналов, то интенсивность
обслуживания увеличивается в i раз и, следовательно, Pi, ,i+1 = i , причем i
m , где m - число каналов обслуживания.
Распределение времени ожидания определяется интенсивностью
ухода требований из очереди при наличии в ней одного требования. Для
очереди длины r интенсивность, с которой требования отказываются от
обслуживания и уходят из очереди, равна r. Таким образом, плотность
вероятности перехода из состояния Sm+r в Sm+r-1 (r 1) равна сумме
освобождения каналов и отказа от обслуживания, т.е.
m + r, m + r-1 = m + r .
После того, как граф (рис. 4.7) размечен, записываем систему
дифференциальных уравнений
dP0
λ P0 μP1 ;
dt
dPi
(4.31)
λPi1 (λ iμμ)i (i 1)μ Pi1 (1 i m 1;
dt
dPm r
λ Pm r 1 (λ mμ rνν)m r mμ (r 1)ν Pm r 1 (r 0)
dt
Полученная система содержит неограниченное число уравнений. Она
становится конечной, если накладываются ограничения на длину очереди,
т.е. на величину r .
При исследовании операций интересуются стационарным режимом, который
наступает при t . Стационарный режим описывается системой
алгебраических уравнений, которая получается из системы (4.31) путем
приравнивания нулю всех производных, т.е.
λ ò0 μ ò1 0
λ òi1 (λ i μ)Pi (i 1)μ Pi1 0 (1 i m)
λ Pm r 1 (λ mμ r ν)Pm r [mμ (r 1)ν)νm r 1 0 (r 0)
4.3.2 Порядок выполнения работы
120
(4.32)
В стационарном режиме система меняет свои состояния случайным
образом. Но вероятности их уже не зависят от времени. Каждая из них,
являясь постоянной величиной, характеризует относительное время
пребывания системы в данном состоянии.
Присоединив к
системе (4.32) нормировочные
условия Pi 1,
i
можно определить значение
вероятностей в установившемся режиме и
получить ряд общих характеристик процесса. Из первого уравнения системы
λ
λ
(4.32) находим P1 P0 α P0 , где α
называют приведенной
μ
μ
плотностью потока требований. Определяя из каждого последующего
уравнения новую неизвестную и подставляя значения неизвестных, получаем
αi
(4.33)
Pi P0
(1 i m)
i!
При i>m тем же способом находим
αm
αr
αr
Pm r
r
P0 r
Pm (r 1) , (4.34)
m! (m jββ
(m jββ
j1
где β
j1
ν
- называется приведенной плотностью потока ухода из очереди
μ
(без обслуживания).
В соответствии с нормировочным суммированием (4.33) и (4.34)
получим
P0
1
α α m
αr
r
t 0 t!
m! r 1 (m jβ)
m
t
m
(4.35)
j1
Средняя длина очереди rср определяется как математическое ожидание
числа находящихся в очереди требований, т.е.
r– ð r Pmr
r 1
αm
r αr
r
P0 (r 1)
m! r 1 (m jβ)
(4.36)
j1
Так как некоторые требования, не дождавшись обслуживания,
покидают очередь с интенсивностью , то всегда будет уходить rср
требований в единицу времени, r из поступивших за это же время
требований будет обслужено rср. Отсюда находим важные
характеристики системы - относительную пропускную способность q и
среднее число занятых сигналов кср:
121
λ ν rcp
ν rcp
q
1
(4.37)
λ
λ
λ ν rcp
k cp
α β rcp (4.38)
μ
Величину кср можно также определить как математическое ожидание
числа занятых каналов, т.е.
m 1
m 1
m 1
r 0
r 0
i 0
i 0
k cp i Pi m Pm r i Pi m(1 Pi ) ,
(4.39)
где использовано нормировочное условие и то обстоятельство, что в
состояниях Sm+i все m каналов заняты. Это выражение (4.39) более удобно,
т.к. не требуется суммировать бесконечный ряд при определении r ср.
Поэтому им можно воспользоваться для вычисления rср и q:
α k cp λ μ k cp
rcp
(4.40)
β
ν
q 1
ν(α k cp ) k cp μ
k cp
λβ
α λ
4.3.3 Задание
(4.41)
4.3.3.1. Чистая система с ожиданием, в которой требования не
оставляют очереди, что соответствует неограниченному времени ожидания.
При этом используют соотношения:
соотношение (4.33)
αi
Pi P0
(1 i m)
i!
и из (4.33)
2
α mr
α
Pm r 2
P0 Pm
(r 1) (4.42)
m m!
m
отсюда получаем
1
1
(4.43)
P0
2
i
m 1
i
m
m α
m α
α
α
α
i 0 i!
m!(m α)
i 0 i!
r
1
m! r
Выражение для Р0 (4.43) справедливо при m, т.к. только при этом
условии бесконечная сумма в его знаменателе сводится к конечному числу
α
. Если же m, то знаменатель будет неограниченно возрастать и Р0=0,
mα
и вероятность любого состояния со временем станет равной нулю, что
соответствует неограниченному возрастанию очереди и отсутствию
стационарного режима. При стационарном режиме m, среднее число
122
заявок конечно и выражается формулой
r
αm α
α m1
rcp
P0 .
r P0
m! r 1 m
(m 1)(m α) 2
(4.44)
Задача 1.
На автозаправочную станцию поступает пуассоновский поток с
интенсивностью =1,6 (автомашин в минуту). Колонка обслуживает машину
в среднем за 1,25 мин (=0,8 1/мин). Определить условие, при котором
система имеет: 1) стационарный режим; 2) среднее число rср машин в очереди
при трех (m=3) работающих колонках; 3) вероятность того P(rср3), что длина
очереди не превышает количества колонок; 4) необходимое количество
колонок, при котором вероятность того, что длина очереди превышает число
колонок, равна или меньше 0,01.
1.1. Порядок выполнения работы.
λ 1,6
Из условия задания α
2.
μ 0,8
По формуле (4.43)
P0
1
α
α m1
i 0 i!
m!(m α)
m
i
условием стационарности режима является <m, т.е. 2<3.
По (4.33) для чистой системы с ожиданием при m=3 находим
1
1 2 1 3
24
1 2 2 2
9,
P0
2
6
6(3 2)
1
отсюда находим P0 .
9
αi
При отсутствии очереди по (4.33) Pi P0 , находим
i!
2
2 1 2
2 1 2
23 1 4
.
P1 ; P2 ; P3
1 9 9
2 9 9
6 9 27
2
α
При возникновении очереди по (4.42), Pm z Pm определяем
m
2
3
8
16
32 .
2 4
2 4
2 4
P4
; P5
; P6
3 27 81
3 27 243
3 27 729
На основании
этих данных по
(4.44)
α m 1
rð
P0
(m 1)(m α) 2
24
1 8
вычисляем rð
, находим для этих условий,
2
2(3 2) 9 9
123
6
P(r 3) Pi
i 0
665
0,912
729
отсюда 1-0,912=0,088>>0,01 .
Полученное значение вероятности сильно превышает заданное (0,01).
Испытаем случай при m=4. Аналогично находим: Р0=0,130; Р1=0,260;
Р3=0,173; Р4=0,087; Р5=0,043; Р6=0,021; Р7=0,011; Р8=0,005, отсюда
8
P(r 4) Pi 0,990 .
i 0
Вероятность нахождения в очереди более четырех машин равна 10,99=0,01.
Таким образом, для удовлетворения поставленного условия достаточно
четырех колонок.
Таблица 30 Варианты задач
№ вариантов
1
2
3
4
5
6
7
8
9
10
11
2,1
1,6
2,4
1,7
2,8 2,9
1,8 1,9
3,0
2,0
3,2
2,4
3,4
2,8
3,6
3,0
1,0
0,4
0,8
0,6
1,4
1,2
Для выбранного варианта провести исследования по условиям
исходного примера.
4.3.3.2. Система с отказами принимает требования на обслуживание
только при наличии свободных каналов.
Требование, поступившее в момент времени, когда все m каналы заняты,
немедленно получает отказ, покидает систему и в дальнейшем процессе
обслуживания не участвует. Это значит, что очередь отсутствует ( rð =0) и
система характеризуется конечным членом уравнений, соответствующих
состояниям S0, S1,....Sm.
Соотношения для системы с отказами имеет вид
1
αi
P0 m i (20);Pi P0 (1 i m).
(4.45)
α
i!
i 0
i!
Эти выражения можно преобразовать к виду, удобному для вычисления
при больших i, если использовать приближенную формулу
αi
α i α
l
R(i,α)
R(i,α) R(i 1,α)
i!
i!
Pi
, (4.46)
k
k
m
m
α
α α R(m,α)
R(m,α)
*
* l
k 0
k! k 0 k!
124
где
R(n,a) Ô(
n 0,5 a)
0,5
a
(4.47)
Эти выражения (4.46), (4.47) называют формулами Эрланга.
Полагая k=m (все каналы заняты), получаем вероятность отказа:
αm
αm
1
R(m 1, α)
P”˜• Pm P0 m k 1
(4.48)
α
m!
m!
R(m,α)
*
k 0
k!
Так как все требования, не получившие отказа, обслуживаются, то
относительная пропускная способность будет
q 1 Pm
R(m 1, α)
R(m,k)
(4.49)
Среднее число занятых каналов Kср можно выразить как отношение
абсолютной производительности системы к интенсивности обслуживания ,
т.е.
K –ð
λ(1 Pm )
R(m 1, α)
d(1 Pm ) αq α
(4.50)
μ
R(m,α)
Задача 2.
Пусть станция обеспечивает не более 120 переговоров одновременно.
Средняя длительность разговора 1 мин, а вызовы поступают в среднем через
0,5 с. Рассматривая станцию как систему с отказами, определить:
1) среднее число занятых каналов,
2) относительную пропускную способность q,
3) среднее время пребывания вызова на станции tср.
2.1. Порядок выполнения работы.
По условию параметры станции:
μ
1
1
; λ
2
60
0,5
α
λ
2
120
1
μ
60
Так как число состояний велико, воспользуемся состоянием (4.50):
R(m 1,α)
R(119,120) , где по формуле (4.47)
K –ð α
120
R(m,α)
R(120,120)
119 0,5 120
) 0,5 Ô( 0,046) 0,5 Ô(0,046) 0,5
120
120 0,5 120
R(120,120) Ô(
) 0,5 Ô(0,046) 0,5
120
R(119,120) Ô(
По табл. 9[3] с помощью интерполирования находим интеграл Лапласа
Ф(0,046)=0,018, следовательно:
R(119, 120)=-0,018+0,5=0,482
R(120, 120)=0,018+0,5=0,518
C учетом полученных значений имеем:
125
K – ð. 120
q
0,482
112 (каналов)
0,518
k – ð. 112
0,931
α 120
k –ð .
112
56 с.
λ
2
Таким образом, станция имеет резервы.
Варианты задач (таблица 31).
Таблица 31 Варианты задачи
№
варианта
1
2
3
4
5
6
7
t – ð.
/
Количество
каналов
Средняя
длительность
разговора
Интервал
следования
вызова
8
9
10
11
12
100 120 130 70 150 160 170 180 200 220 240 260
1
1
2
1
1
1
1
1,5 1,5 1,8 1,8 1,8
0,5 0,5 1,0 1,2 1,5 1,2 1,6 1,8 2,0 2,2 2,4 2,6
Для выбранного варианта провести исследования по условиям
исходного примера.
4.3.3.3. Система с ограниченной длиной очереди. Характеризуется тем,
что поступившее требование становится в очередь только тогда, если число
требований в ней не превышает заданного значения r = V
Соотношения в стационарном режиме для данной системы получаем,
ограничив суммирование по r вероятности пределом V в известных формулах
(4.33), (4.42), (4.43):
1
P0
r ;
i
m α
αm α
i 0 i!
m! i1 m
αi
Pi P0 (1 i m) ;
i!
r
αm α
Pm r P0 (1 r V)
m! m
Вероятность того, что требование покинет систему необслуженным,
равна вероятности Рm+V, характеризующей наличие в очереди V заявок, а
относительная пропускная способность системы выражается, как q= 1 - Pm+
126
+V .
Задача 3
Два рабочих обслуживают группу из шести станков. Остановка
каждого работающего станка происходит каждые полчаса. Процесс наладки
занимает в среднем 10мин. Определить: 1) среднюю занятость рабочих; 2)
абсолютную
пропускную
способность;
3) среднее количество неисправных станков.
3.1. Порядок выполнения работы.
Возможные состояния системы обслуживания следующие:
S0 - все станки работают, рабочие не заняты;
S1 - один станок остановился и один рабочий занят;
S2 - два станка остановились и два рабочих заняты;
Si - i станков остановились, два из них настраивают, i - 2 - ждут очереди (i
= 3,4,5,6).
Граф системы показан на рис. 4.8,
где λ 60 2 - интенсивность потока требований (2 станка в час)
30
Рис. 4.8. Граф состояний участка цеха
60
6 - интенсивность обслуживания (6 станков в час).
10
Уравнения для стационарного режима запишутся в виде:
-6P0 + P1 = 0 ;
6P0 -(5 + ) P1 + 2 P2 = 0 ;
5P1 - (4 + 2) P2 + 2 P3 = 0;
4P2 -(3 + 2 ) P3 + 2 P4 = 0 ;
3P3 - (2 + 2) P4+ 2 P5 = 0;
2P4 - ( + 2) P5+ 2 P6 = 0;
P5 - 2P6 = 0 ;
Отсюда находим вероятность состояний
5
10
6
12
P1
P0 P0 2P0 ; P2 P0 ; P3 P0 ;
6
9
3
5
5
5
P4 P0 ; P5
P0 ;
P0 ; P6
9
162
27
μ
127
6
5
)P0 1 ;
Pi (1 2 53 109 95 275 162
i 0
162
0,153 .
1061
Среднее число занятых рабочих определяется математическим
ожиданием распределения настраиваемых станков, т.е.
Кср.=Р1+2(Р2+Р3+......+Р6)=Р1+2(1-Р0-Р1)=2(1-2Р0)=2(1-20,153)=1,3882.
При математическом обслуживании = 6 среднее число станков,
обслуживаемых в единицу времени, т.е. абсолютная пропускная способность,
определяется как
Находим P0
μ
6
1,388 4,164 6 .
λ
2
Среднее число неисправных станков равно математическому
ожиданию распределения станков, связанных с процессом обслуживания
q K ñð
W– р 1т1 2т 2 3т 3 4т 4 5т5 6т 6 12 т 0 12 0,153 1,836
Таблица 32 Варианты задач
№ варианта
1
2
3
Количество
станков
Интервал
остановки
(мин)
Время
наладки
(мин)
4
5
6
7
8
9
10
5
6
7
7
8
9
10
12
11
10
30
40
30
20
20
30
30
20
40
40
15
10
10
10
10
15
20
10
20
20
Исследования для выбранного варианта провести по условиям
исходного примера.
Эти примеры типичны для замкнутых систем массового обслуживания.
4.3.4 Контрольные вопросы
1. Сравнить полученные результаты исследований со стационарным
режимом.
2. По каждой задаче провести анализ результатов.
3. Разработать комплекс мероприятий по обеспечению режима работы
системы близкому к стационарному.
128
Литература
1. Алпатов Ю. Н. Синтез систем управления методом структурных графов. –
Иркутск: НГУ, 1988
2. Сигорский В. П. Математический аппарат инженера. – Киев: Техника, 1978
3. Черчмен У, Акоф Р, Арноф П. Введение в исследование операций – М.:
Наука. 1968
129
4. Теория автоматического управления. В двух частях. Под редакцией
Воронова А. А. – М.: Высшая школа. 1986
5. Задачник по теории автоматического управления. Под редакцией А. С.
Шаталова. – М.: Энергия. 1979.
6. Жук К. Д., Тимченко А. А. Автоматизированное проектирование логикодинамических систем.: Киев: Наукова думка. 1981.
7. Островский Г. М., Злятдинов Н. Н., Лаптева Т. В. Оптимизация
технических систем. – М : Кнорус. 2012
8. Никулин Е А Основы теории автоматического управления. – СПб.: БХВ,
2004.
9. Методы классической и современной теории автоматического управления.
Под редакцией Пупкова К. А. – М.: МГТУ им. Н. Э. Баумана. – 2004 Т. 1, 2.
Содержание
Введение………………………………………………………………………..….3
Глава 1. Топологические методы анализа и синтеза систем управления…..4
1.1. Топологический метод идентификации систем управления…..…..4
1.2. Метод синтеза одномерных систем управления…………………...14
130
1.3. Исследование многомерных объектов управления……………..….31
1.4. Декомпозиция компонент структуры системы с помощью цепных
дробей………………………………………………………………….……41
Глава 2 Моделирование компонент систем управления……………………55
2.1. Электромеханический преобразователь………………………..….55
2.2. Гидроусилитель………………………………………………….…..58
2.3. Гидродвигатель………………………………………………………64
2.4. Исследование устойчивости системы управления…………..…….68
Глава
3
Моделирование
технологических
процессов
лесного
производства……………………………………………………………………74
3.1. Определение диапазона диаметров пиловочного сырья для
выработки обрезных пиломатериалов заданного сечения……………74
3.2. Исследование эффективности способов раскроя необрезных досок
на заготовки……………………………………………………………….79
3.3. Исследование влияния технологических факторов на коэффициент
использования машинного времени обрезного станка……………….….87
3.4 Моделирование процесса роста лесного массива……………….…..89
Глава 4 Моделирование производственных процессов……………………..102
4.1. Моделирование задачи оптимального календарного планирования
серийного производства……………………………………………..…102
4.2. Оптимизация производственного плана методом линейного
программирования……………………………………………………...111
4.3. Моделирование систем массового обслуживания………………..130
131