Полуактивное гашение вибраций балки с адаптивными
advertisement

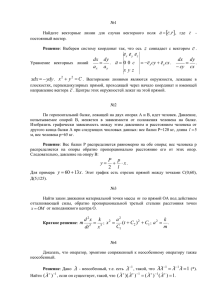
УДК 539.3 М.Г. Ботогова, к-т физ.-мат.наук Белорусский национальный технический университет, Минск Г.И. Михасев, д-р физ.-мат.наук Белорусский государственный университет, Минск ПОЛУАКТИВНОЕ ГАШЕНИЕ ВИБРАЦИЙ БАЛКИ С K ПРИСОЕДИНЕННЫМИ ДИНАМИЧЕСКИМИ ГАСИТЕЛЯМИ КОЛЕБАНИЙ. Рассматриваются колебания балки с присоединенными к ней гасителями колебаний; с использованием метода многих масштабов строится приближенное решение системы уравнений, описывающих колебания балки и присоединенных демпферов, исследовано влияние коэффициента демпфирования на амплитуду колебаний балки. 1. Введение. Управление колебаниями упругих систем можно разделить на два типа — пассивное управление и активное управление. Пассивное управление осуществляется путем выбора параметров системы, чтобы получить требуемые динамические характеристики: демпфирование колебаний, расположение собственных частот в заданном диапазоне, качество переходного процесса, амплитудночастотные характеристики. Для этих целей также можно подбирать подходящие временные характеристики и пространственное распределение внешних воздействий (нагрузок), если они допускают такие изменения. Для замкнутых систем (конструкция плюс система управления) кроме всего еще могут выбираться места расположения измерительных датчиков и приводов (их можно отнести к параметрам системы). По существу пассивное управление колебаниями упругих конструкций является предметом их рационального проектирования. При активном управлении упругая конструкция с действующими на нее нагрузками, как объект управления (ОУ) объединяется обратными связями с системой автоматического регулирования (автоматом стабилизации (АС)), включающей в свою структуру измерительные, вычислительные, усилительные, корректирующие и исполнительные устройства. В результате управляющие воздействия на ОУ зависят от параметров его движения в точках расположения измерительных датчиков. При этом замкнутая система становится неконсервативной, даже если ОУ является консервативной системой. К числу обобщенных координат, описывающих движение ОУ, добавляются переменные параметры АС. В результате размерность замкнутой системы повышается, иногда значительно. Динамика упругих систем с активным управлением (автоупругость) начала интенсивно развиваться в последние три десятилетия благодаря потребностям авиационной и ракетнокосмической техники, а также созданию быстродействующих управляемых манипуляционных роботов с упругими звеньями. В последнее десятилетие такие исследования распространились на гражданские сооружения для активного управления напряженно-деформированным состоянием, колебаниями и устойчивостью конструкций. В данной статье рассматривается полуактивное гашение колебаний балки. Здесь система регулирования – это динамические гасители колебаний с ненулевыми начальными перемещениями. Предлагаемый способ гашения колебаний полуактивный, так как он требует внешнего ввода начальных перемещений демпферов. 2. Постановка задачи. Рассмотрим колебания балки с k присоединенными динамическими гасителями колебаний. Пусть mb – масса балки, m i – масса i-го гасителя колебаний, c i – жесткость пружины i-го гасителя колебаний, l– длина балки, b, h– размеры поперечного сечения балки, S– площадь поперечного сечения балки, ρ– плотность балки, J – bh3 момент инерции поперечного сечения балки относительно оси х ( J ), 12 i демпфирования i-го гасителя. Рис. 1. Система балка-демпферы. Уравнения колебаний системы балки-гасители имеют вид [2 ]: 4W S 2W A x 4 EJ t 2 EJ k 2 i 1 i c i m i yi c i yi H 0 (ai x) H 0 ( x ai ) 0, t – коэффициент 2 y 2W m i 2 i 2 t t y c i yi 2i c i m i i 0, t x ai i=1, 2…k. (1) S yi lzi , tc l 2 . Тогда систему (1) можно EJ 1/ 2 Пусть W lw, t tctˆ, x ls, переписать в безразмерном виде z 4w 2w k 2 csi zi cdii (t ) i H 0 (ai x) H 0 ( x ai ) 0, 4 s tˆ tˆ i 1 2 z 2w z 2i 2 ksi zi 2kdi1/ 2i (t ) i 0, tˆ s a / l s tˆ tˆ i i 0i (2) i 1, 2...k. 2c1/ 2l 2 S 2 Al 4 c i m i c t 2 c Sl 4 Al 4 c i 2ksi1/ 2 . Здесь , kdi 1/i 2 csi , cdi , ksi i c i m i EJ 1/ 2 m i m i EJ EJ EJtc 1/ 2 c 1 m i EJ i , i csi , где cb 3 - жесткость балки, cdi 2i cˆ1/si 2 , l mb l cb Введем обозначения A , ksi cˆsi . Далее будем считать, что все гасители одинаковой массы, т.е. m i i . mb С учетом введенных обозначений уравнения (2) имеют вид 4w 2w k z 2 cˆsi z 2cˆ1/si 2i (t ) H 0 (ai x) H 0 ( x ai ) 0, 4 s tˆ tˆ i 1 2 zi 2 w z 2 cˆsi zi 2cˆ1/si 2i (t ) i 0, 2 tˆ tˆ s a / l s tˆ i i i=1, 2…k. (3) 0i Пусть масса гасителя является малой по сравнению с массой балки, т.е. – малый параметр. Далее положим, что w 1 , сˆsi 1 , zi 1/ 2ui , ui 1 , i 1/ 2i tctˆ 1/ 2 i tˆ . Следовательно, систему (3) можно переписать в виде (4) k u 4w 2w 1/ 2 cˆsi ui 2 cˆsi i (tˆ) i Q( si ) 0, 4 2 ˆ s t tˆ i 1 2 2ui ui 1/ 2 1/ 2 1/ 2 w ˆ ˆ ˆ c u 2 c ( t ) si i si i tˆ 2 tˆ tˆ 2 i=1, 2…k. (4) 0. si s0 i В системе (4) Q(si ) H0 l (s0i s) H0 l (s s0i ) . Разложим функцию Q( si ) в ряд Фурье Q( si ) q0i sin( ns ) , n 1 где q0i 2sin( ns0i ) . Тогда система (4) имеет вид (6): (5) k u 4w 2w 1/ 2 cˆsi ui 2 cˆsi i (tˆ) i q0i sin( ns ) 0, 4 2 s tˆ tˆ i 1 n 1 2 2ui ui 1/ 2 1/ 2 1/ 2 w ˆ ˆ ˆ c u 2 c ( t ) 0, si i si i tˆ 2 tˆ tˆ 2 s s i (6) i 1, 2...k . 0i В качестве граничных условий выбираем условия шарнирного опирания балки: w 2w 0 при s=0, 1. s 2 (6’) Метод решения. Для решения задачи (6) – (6’) воспользуемся методом многих масштабов [1]. Решение системы будем искать в следующем виде: w w0 s, 0 ,1 , 2 , 1/ 2 w1 s, 0 ,1 , 2 , w2 s, 0 ,1 , 2 , ... ; (7) ui u0i s, 0 ,1 , 2 , 1/ 2u1i s, 0 ,1 , 2 , u2i s, 0 ,1 , 2 , ... ; где 0 tˆ , 1 1/ 2tˆ , 2 tˆ , i (tˆ) fi ( 2 ) . Будем контролировать n-ую моду колебаний w sin( ns)W (tˆ), Q (si ) q0i sin( ns) . (8) Пусть cˆs n2 1/ 21i , следовательно, i cˆsi1/ 2 n 1/ 2 ni , ni 1 1i . 2 n (9) Подставим (7) в (6) с учетом (8), (9) и, приравнивая коэффициенты при одинаковых степенях 1/ 2 , получим последовательность уравнений для определения функций wm и um (m=0,1,2…). В нулевом приближение получим систему дифференциальных уравнений: 0 : 4 w0 2 w0 2u0i 0, cˆsi u0i 0 , s 4 20 02 i=1, 2…k, (10) решение которой запишем в виде (11) w0 sin ns A(1 , 2 )cos 0 B(1, 2 )sin 0 , u0i Ci (1 , 2 ) cos 0 Di (1 , 2 )sin 0 . (11) Здесь 2 n 2 . В первом приближение получим следующую систему уравнений: 1/ 2 : 2 w1 n2 w1 1 0, 20 2u1i n2u1i 2i 0, i=1, 2…k, где 20 (12) k 1 2 q0i u0i 2 i 1 2 2 fi k 2 k 2 w0 B A 2 q0iCi 2 cos q0i Di 2 sin 0 ; 0 01 i 1 1 1 i 1 u0i 1 2 w0i 2u0i q0i 2 1i u0i 0 2 02 0 1 1 1 D C q0i 2 A 2 fi 2 Di 2 i Ci1i cos 0 q0i 2 B 2 fi 2Ci 2 i Di1i sin 0 . 1 1 2 2 Чтобы устранить вековые члены в решении системы (12) необходимо положить: k q0i Ci 2 i 1 B 0, 1 k q0i Di 2 i 1 q0i A 4 f i Di 4 Di 2 Ci1i 0, 1 q0i B 4 f iCi 4 Ci 2 Di1i 0, 1 A 0, 1 (13) i 1, 2...k . Данную систему уравнений можно переписать следующим образом: A k q0i Di , 1 2 i 1 (13’) B k q0i Ci , 1 2 i 1 Di 1 2 q0i A 1i Ci 4 f i Di , 1 4 Ci 1 2 q0i B 4 fi Ci 1i Di , 1 4 i=1, 2…k. Далее считаем, что все гасители одинаковой жесткости, т.е. f1 f 2 ... f k f , 11 12 ... 1k 1 . Из системы (13) или (13’) получим дифференциальное уравнение для определения функции А: 12 A fG 3 4G 2 4 A 3 A 2 A 2G 2 2 2 f f A0. 14 13 12 4 4 2 1 4 64 k Здесь G q02i . i 1 Составим характеристическое уравнение для уравнения (14): 2G 12 fG 3 G 2 4 2 2 2 f f 2 0. 4 4 64 4 4 3 2 (14) Так как выполняются условия Гурвица отрицательности вещественных частей корней данного характеристического уравнения, их можно записать в виде 1,2 k12 in12 , 3,4 k22 in22 . Следовательно, A(1 , 2 ) C1 2 e k1 1 cos n121 C2 2 e k1 1 sin n121 C3 2 e k21 cos n221 C4 2 e k21 sin n221 . 2 2 2 2 Функция В определяется из уравнений B 1 B 8 2 B 41 A B 2 8 f A 8 2 A , 8 f G A . G 1 12 2 1 1 41 1 12 Исследуем зависимость амплитуды колебаний балки от коэффициента демпфирования гасителей f. Выбираем начальные условия в следующем виде: w0 0, w0 v0 sin ns , u0i 0 , u0i 0 . Следовательно, перемещение балки и i-го w0 B(1 , 2 )sin 0 , (15) u0i Ci (1 , 2 ) cos 0 . (16) Чтобы изучить влияние коэффициента f на амплитуду колебаний балки, рассмотрим отношение амплитуды балки в начале и конце m- ого полупериода колебаний, т.е. в моменты времени m 1/ 2 , m 1 1/ 2 : m 1 1/ 2 B . R 1/ 2 m B Введем обозначения (16) w0 m B m 0 m1/ 2 B го демпфера в момент времени 0 - скорость балки, u0im - перемещение i- m . n 1 1/ 2 Раскладывая B в ряд Тейлора, получим m 1 1/ 2 B m 1/ 2 B 1/ 2 1 1 o( ) R m 1/ 2 m1/ 2 B B m 1/ 2 q C 0i i 1/ 2 i 1 o 1 2 m 1/ 2 B k 1 1/ 2 2 Введем обозначение rm 2 q q u 0i 0i i w0 o . (17) u 0 i 0 im i w0 m (18) . Тогда R 1 1/ 2rm o( ) . (19) Очевидно, что для затухания колебаний следует потребовать выполнение условия 0<R<1. Из (19) следует, для того чтобы R<1, rm <0, rm Следовательно, q u 0i 0i 1 при 0 . и w0 должны иметь разные знаки, q0i должно быть равно i 2 (см. формулу (5)). В качестве примера рассмотрим балку с тремя присоединенными l 6 демпферами. Пусть n=3 ( третья мода колебаний). Пусть a1 , a2 u01 u02 u03 0.0018 , v0 1 , μ=0.01, 3l 5l , a3 , 2 6 1 =1, 9 2 , q01 q02 q03 2 , f=1. Корни характеристического уравнения записываются в виде 1,2 44.3695 99.213i , 3,4 44.3669 99.207i , функция B(1 , 2 ) , которая характеризует прогиб балки, равна B 1 0.0056e44.3669 cos(99.2071 ) 0.0056e44.3695 cos(99.2131 ) 1 1 0.0001e44.3669 1 sin(99.2071 ) 0.0001e44.36951 sin(99.2131 ). Рассмотрим случай, когда к середине балки прикреплен один гаситель[3]. Пусть u0 0.0036 , w0 1 , μ=0.01, 1 =1, 9 2 , q0 2 , f=1. Корни характеристического уравнения в данном случае записываются в виде 1,2 44.371 44.371i , 3,4 44.365 44.365i , функция B(1 , 2 ) равна B 1 0.0056e44.3651 cos(44.3651 ) 0.0056e44.3711 cos(44.3711 ) 0.002e44.3651 sin(44.3651 ) 0.002e44.3711 sin(44.3711 ). При наличии трех гасителей колебания балки затухают быстрее. Список литературы 1. Найфэ А.Х. Методы возмущений / А.Х. Найфэ. – М.: Мир,1972. – 446 c. 2. Semi-active dynamic vibration absorbers for controlling transient response. M. Abe, T. Igusa // Journal sound and vibration. – 1996. –№198(5) – P. 547-569. 3. Михасев Г.И., Ботогова М.Г // О контроле n-ой моды колебаний балки с присоединенным динамическим гасителем. //Теоретическая и прикладная механика: Сб. ст. – 2009. – вып 24 – с. 30-33. В журнале Механика машин, механизмов и материалов. – 2009. –№4(9).