разработка методики проектирования законов движения и ее
advertisement

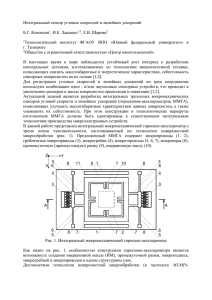
Метод оценки структурных параметров стеблевого слоя льняной тресты 1 УДК 677.05:681.3 РАЗРАБОТКА МЕТОДИКИ ПРОЕКТИРОВАНИЯ ЗАКОНОВ ДВИЖЕНИЯ И ЕЕ ПРОГРАММНАЯ РЕАЛИЗАЦИЯ А.Ю. Филимонов* На основе анализа существующих методов проектирования кулачковых механизмов предложена классификация законов движения и введены унифицированные коэффициенты. Описано разработанное программное обеспечение, позволяющее выполнять расчеты по единой методике. Кулачковый механизм, закон движения, методика проектирования. В существующих методах проектирования кулачковых механизмов [1] отсутствует обоснование выбора и сама методика проектирования законов движения их исполнительных элементов. В источниках, посвященных проектированию мотальных механизмов [2] и ткацких станков [3, 4], приводятся некоторые сведения по данной теме, например графики перемещения батана и ремиз ткацкого станка. Но к этим графикам не приведены ни числовые данные, ни методика проектирования. В единственном общедоступном источнике, в котором отражена информация по теме проектирования законов движения, описывается методика проектирования законов движения зевообразовательных механизмов ткацких станков [5]. В данном пособии введено в качестве одной из важнейших характеристик закона движения понятие коэффициента асимметрии, который характеризуется отношением времени закрытия зева к времени движения ремиз. Методика проектирования [5] является узконаправленной и охватывает лишь четыре простейших закона движения, также из недостатков существующей методики стоит отметить то, что она не учитывает такую кинематическую характеристику, как пульс. Поэтому целью нашей работы и явилось создание единой методики проектирования законов движения исполнительных элементов кулачковых механизмов. Стоит отметить, что данная методика применима для всех случаев, где характер движения не лимитируется структурой или свойствами обрабатываемого материала или траекториями движения, а определяется лишь начальным, конечным и, возможно, некоторым промежуточным положениями исполнительного элемента, а также временем движения. Учет пульса существенно усложняет задачу расчета конкретного закона движения, так как здесь цикл движения разбивается не на три, как это сделано ранее [5], а на семь интервалов. Поэтому нами разработано соответствующее программное обеспечение (ПО), позволяющее автоматизировать процесс проектирования. Для начала законы движения были разделены на 3 группы: ударные, характеризующиеся разрывами ускорения; псевдо-безудар-ные, имеющие разрывы пульса; безударные, не имеющие разрывов ни в одной из функций. Графики кинематических характеристик решено было конструировать путем комбинации прямых линий и синусоид (косинусоид), исходя из целесообразности минимизации максимальных скоростей и ускорений, что в свою очередь позволит уменьшить размер кулачков и снизить инерционные нагрузки. При разбивке цикла движения на 7 интервалов (рис. 1) возможно девять таких комбинаций. 1 Рис. 1. Цикл движения, разбитый на интервалы * Работа выполнена под руководством д.т.н., проф. С.Н. Титова. Метод оценки структурных параметров стеблевого слоя льняной тресты 2 Для характеристики законов были введены коэффициенты, не привязанные к конкретному исполнительному органу, как в пособии [5], а унифицированные, пригодные для любого варианта. Нами предложено ввести два вида коэффициентов: трапецеидальности и скошенности как для скоростей, так и для ускорений. Для ускорений данные коэффициенты введены также для фаз разгона и торможения: (1) (2) (3) (4) (5) (6) На введенные коэффициенты наложены определенные ограничения: (7) . (8) Остальные коэффициенты, не указанные выше, могут быть в пределах от нуля до единицы. Таким образом, закон практически любой сложности можно задать, выбрав один из девяти типов и задав соответствующие коэффициенты. Следовательно, задачей вывода конкретного закона движения является определение длительности каждого из семи временных интервалов (см. рис. 1), математических выражений всех кинематических характеристик и амплитуд ускорений при известном математическом описании ускорений в общем виде. Алгоритм вывода основан на последовательном интегрировании математических описаний ускорений (а затем и скоростей) с определением по граничным условиям постоянных интегрирования. Предложенный нами алгоритм не отличается от известного [5], но значительно более сложный и трудоемкий. Порядок действия следующий: 1) по известным коэффициентам определяем временные интервалы через общее время движения: (9) (10) (11) (12) (13) (14) (15) (16) ; (17) 2) задаемся уравнениями ускорений для каждой фазы в зависимости от выбранного закона; 3) интегрируя в общем виде уравнения ускорений при разгоне, получаем общий вид уравнений скоростей; Метод оценки структурных параметров стеблевого слоя льняной тресты 3 4) последовательно определяем постоянные интегрирования по известным для начала каждой фазы значениям скоростей, которые определяются из предыдущей фазы (в начале движения V = 0); 5) повторяем пп. 3, 4 для фаз торможения в обратном порядке по времени и с учетом того, что в конце движения V = 0; 6) в итоге получим два выражения для , из которых можно определить соотношение между амплитудами ускорения и замедления; 7) определяем момент времени, когда скорость максимальна (не для всех законов); 8) повторяем пп. 3, 4 для уравнений скоростей, получаем уравнения перемещений, зная, что в начале движения перемещение равно нулю, а конечное значение перемещения задается пользователем; 9) выражая амплитуды ускорений через известное максимальное перемещение, получаем конкретные математические описания всех кинематических характеристик. На основе вышеописанного алгоритма было разработано ПО для платформы Microsoft Windows, интерфейс которого представлен на рис. 2. Результаты расчета программы выводятся в два окна (рис. 3). Выводы Разработанное ПО имеет ряд преимуществ перед ручными методами проектирования: возможность оперативного расчета параметров выбранного закона, подбор оптимального вида и типа самого закона. Однако программа нуждается в доработке, а именно в реализации возможности расчета и анализа кинематических характеристик для полного цикла движения исполнительного органа. Рис. 2. Главное окно программы Рис. 3. Вывод результатов работы программы СПИСОК ЛИТЕРАТУРЫ 1. Артоболевский С.И. Теория механизмов и машин / С. И. Артоболевский. – М. : Наука, 1968. 2. Прошков А.Ф. Механизмы раскладки нити / А. Ф. Прошков. — М. : Легпромбытиздат, 1986. 3. Основы проектирования машин ткацкого производства : учебник / под общ. редакцией А. В. Дицкого. – М. : Машиностроение, 1983. 4. Орнатская В.А. Проектирование и модернизация ткацких машин / В. А. Орнатская, С. С. Кивилис. – М. : Легпромбытиздат, 1986. 5. Ульянов В.И. Расчет и конструирование зевообразовательных механизмов ткацких станков : учебное пособие / В. И. Ульянов, В. Н. Грушин, С Е. Проталинский. – Ярославль : Изд-во ЯПИ, 1985. DEVELOPMENT OF MOVEMENT LAW DESIGN METHODOLOGY AND ITS PROGRAMM RELIAZATION A.Yu. Filimonov Метод оценки структурных параметров стеблевого слоя льняной тресты 4 On basis of analysis of existed methods of designing cam mechanisms classification of movement laws is proposed and unified coefficient methods are introduced. Developed software allowing to do calculations on common methods is described. Cam mechanism, movement law, design methods. Рекомендована кафедрой ТММ, ДМиПТМ КГТУ Поступила 27.05.2010