5.4 Расчёт статически неопределимых балок
advertisement

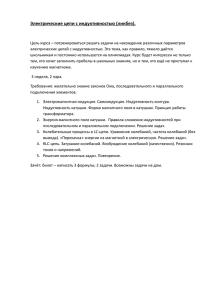
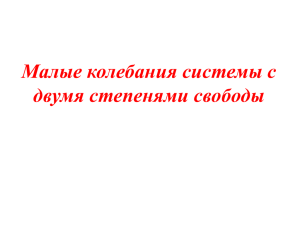
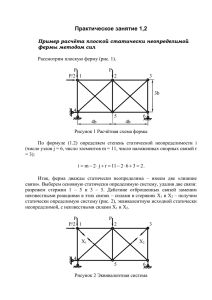
ЛЕКЦИЯ 5 5.4 Расчёт статически неопределимых балок методом сил Напомним, что статически неопределимой системой называется такая система, в которой число наложенных связей превышает число уравнений статики. В статически неопределимых системах невозможно определить все силы, пользуясь только уравнениями статики. Необходимо привлекать дополнительные уравнения. В случае расчёта балки статическая неопределимость её обусловлена наличием «лишних» с точки зрения статики опорных связей. Если балка, опорные связи и приложенная нагрузка находятся в одной плоскости, то на плоскости достаточно трёх связей для того, чтобы балка была геометрически неизменяемой системой и могла воспринимать нагрузки. Число «лишних» связей степень статической неопределимости системы. Рассмотрим примеры – рис. 5.1. P А q B а A B С D б Рис. 5.1 Примеры статически неопределимых балок Так как заделка накладывает три связи, что достаточно на плоскости для геометрической неизменяемости, то балка на рис. 5.1 а является один раз статически неопределимой (одна «лишняя» связь). Балка же на рис. 5.1 б – дважды статически неопределима (две «лишних» связи). Методика составления канонических уравнений метода сил Рассмотрим один раз статически неопределимую балку (рис. 5.2 а). Отбросим «лишнюю» связь – опору в точке В – получим статически определимую балку (рис. 5.2 б). Назовём статически определимую систему, которая получается из исходной системы после отбрасывания «лишних» связей основной системой. Чтобы из неё получить систему, эквивалентную исходной, необходимо приложить нагрузку и реакцию отброшенной связи, которую мы не знаем. Обозначим её через Х1 (рис. 5.2 в). Приложим к основной системе внешнюю нагрузку – силу Р (рис. 5.2 г). Перемещение в направлении Х1 от действия внешней нагрузки – силы Р обо- Техническая механика Лекция 5 2 значим через Δ1Р. Но в направлении Х1 действует ещё нагрузка – сама сила Х1. Она неизвестна. Приложим вначале в направлении Х1 единичную силу – получим перемещение δ11. Теперь приложим силу в Х1 раз больше единичной – получим перемещение в Х1 раз больше, чем от единичной силы, т.е. δ11Х1. Суммарное же перемещение в точки приложение реакции опоры будет δ11Х1 + Δ1Р и оно будет равно нулю, так как в исходной системе эта точка под действием внешней нагрузки – силы Р и реакции опоры Х1 равно нулю, так как опора остаётся на месте: 11X1 1P 0 . (5.11) Уравнение (5.1) называется каноническим уравнением метода сил. Физический смысл его – перемещение в направлении отброшенной связи от внешней нагрузки и неизвестных реакций в отброшенных связях равно нулю. В общем случае n раз статически неопределимой системы, отброшенных связей будет n. Столько же будет неизвестных реакций в отброшенных связях, и перемещение в направлении каждой из отброшенных связей от внешней нагрузки и этих неизвестных реакций будут равны нулю. Итак, система канонических уравнений для n раз статически неопределимой системы запишется: © Учебный центр «Эрудит», www.childrensafety.jimdo.com , © Maria Bezmelnitsina Collé Техническая механика Лекция 5 3 P А B а Основная система б Р Эквивалентная система в Х1 Р Δ1Р г δ11 1 д δ11Х1 Х1 е Рис. 5.2 Идея метода сил 11X1 12 X 2 ... 1n X n 1P 0 21X1 22 X 2 ... 2n X n 2P 0 ... ... ... ... n1X1 n 2 X 2 ... nn X n nP 0 (5.12) где коэффициенты и свободные члены системы уравнений определяются формулами: Mi M j MM ij dz, ip i P dz, i 1,2,...n . (5.13) EI EI l l Интегралы в (5.3) могут быть вычислены по правилу Верещагина. © Учебный центр «Эрудит», www.childrensafety.jimdo.com , © Maria Bezmelnitsina Collé Техническая механика Лекция 5 4 6 Колебания упругих систем с одной степенью свободы Большое значение имеет расчёт на динамическую прочность (в частности, на вибрационную нагрузку). При действии динамической нагрузки серьёзную опасность представляет резонанс. Изучим физико-математическую сторону действия вибрационной нагрузки. Наиболее важным для изучения являются гармонические колебания. Мы будем изучать колебания самой простейшей системы – системы с одной степенью свободы. Числом степеней свободы называется число независимых параметров, полностью определяющих положение системы в любой момент времени. В случае системы с одной степенью свободы решение можно получить в аналитической форме и проанализировать. В качестве системы с одной степенью свободы рассмотрим груз массой m, который прикреплён к опоре с помощью пружины и может двигаться по направляющим только в одном направлении (рис. 6.1 а); следовательно, в любой момент времени единственным параметром, описывающим полностью положение системы является координата z центра масс груза: y2 z y1 z а б Рис. 6.1 Степени свободы системы В случае же реальной системы, например балки (рис. 6.1 б), чтобы описать положение упругой линии, состоящей из бесконечного числа точек, необходим бесконечное число параметров – прогибов точек упругой линии yi. Таким образом, реальная система – система с бесконечным числом степеней свободы и аналитическое решение такой системы получить невозможно, можно получить только численное решение. Можно, например, приближённо заменить балку несколькими участками, массу каждого считать сосредоточенной в центре тяжести участка, и, следовательно, перейти к системе с несколькими степенями свободы (например, двумя, как на рис. 6.1 б). © Учебный центр «Эрудит», www.childrensafety.jimdo.com , © Maria Bezmelnitsina Collé Техническая механика Лекция 5 5 6.1 Уравнение движения системы с одной степенью свободы при наличии сил сопротивления, пропорциональных скорости Рассмотрим систему с одной степенью свободы – тело массой m, прикреплённое к опоре с помощью упругой связи и способное перемещаться по направляющим только в одном направлении (рис. 6.2). На тело действуют: 1. Возмущающая сила P(t), меняющаяся во времени – в положительном направлении оси z; I R P(t) z N z Рис. 6.2 Силы, действующие на груз 2. Сила инерции груза I – в отрицательном направлении оси z: I m d 2z dt 2 ; 3. Восстанавливающая сила со стороны пружины N – в отрицательном направлении оси z . Если удлинение от приложения единичной силы к пружине, называемое податливостью, обозначим через δ, то при растяжении пружины на величину z необходимо приложить силу z N : 4. Сила сопротивления, пропорциональная скорости – в отрицательном направлении оси z: dz R , dt где α – коэффициент пропорциональности. Под действием указанных сил груз находится в равновесии. Приравняем сумму проекций всех сил на ось z: P( t ) m © Учебный d 2z dt 2 dz z 0. dt центр «Эрудит», www.childrensafety.jimdo.com , © Maria Bezmelnitsina Collé Техническая механика Лекция 5 6 Поделим уравнение на m, чтобы прийти к канонической форме: d 2 z dz z 1 P( t ) . 2 dt m dt m m Обозначим 1 p2 ; 2n , m m (6.1) тогда разрешающее уравнение движения системы с одной степенью свободы при наличии силы сопротивления, пропорциональной скорости движения запишется: d2z dz 1 (6.2) 2n p 2 z P ( t ) . 2 dt dt m Уравнение (6.2) – обыкновенное неоднородное дифференциальное уравнение второго порядка с постоянными коэффициентами. Решение его всегда можно найти в аналитической форме. 6.2 Собственные колебания без сил сопротивления Собственные колебания – это колебания без вынуждающей силы, т.е. в уравнении (6.2) вынуждающая сила P(t) равна нулю. Но почему тогда происходят колебания? Массу в начальный момент времени отклонили от положения равновесия, а затем отпустили. Она устремится к положению равновесия под действием восстанавливающей силы в пружине, по инерции проскочит положение равновесия, отклонится от него в другую сторону и затем снова устремится к положению равновесия – начнётся процесс собственных колебаний. Так как силы сопротивления в данном случае отсутствуют, то n = 0 в уравнении (6.2). Итак, дифференциальное уравнение собственных колебаний без сил сопротивления запишется: d 2z dt 2 p2z 0 . (6.3) Общее решение однородного обыкновенного дифференциального уравнения с постоянными коэффициентами (6.3) запишется: z( t ) C1 cos( pt ) C 2 sin( pt ) , (6.4) где константы интегрирования С1 и С2 определяются из начальных условий. © Учебный центр «Эрудит», www.childrensafety.jimdo.com , © Maria Bezmelnitsina Collé Техническая механика Лекция 5 7 Преобразуем решение в форме (6.4). Умножим правую часть его на C1 C 2 2 C1 C 2 2 2 2 ; получим: C1 C2 2 2 z( t ) cos(pt) sin( pt) C1 C 2 . 2 2 2 2 C C C1 C 2 1 2 (а) Так как C1 C1 C 2 2 2 1, C2 C1 C 2 2 2 1, а также C1 2 C C 2 2 1 2 C2 2 C C 2 2 1 2 1, то можно принять: C1 C1 C 2 2 2 C2 sin , C1 C 2 2 2 cos (б) где φ – некоторый угол. И если теперь обозначить C1 C 2 B , 2 2 (в) то решение дифференциального уравнения (а) запишется: z( t ) Bsin cos pt cos sin pt или z( t ) B sin( pt ) , (6.5) где В – амплитуда колебаний, φ – фазовый сдвиг. График функции колебаний, определяемой соотношением (6.5) изображён на рис. 6.3 (В =100, р = 0.1, φ = 1). Значение синуса повторится через угол 2π. Время, через которое это произойдёт называется периодом колебаний и обозначается Т. Найдём период колебаний. Имеем: t T p tp 2 , т.е. 2 . (6.6) T p © Учебный центр «Эрудит», www.childrensafety.jimdo.com , © Maria Bezmelnitsina Collé Техническая механика Лекция 5 8 100 50 50 0 p 50 100 150 200 50 100 Рис. 6.3 График свободных колебаний без сил сопротивления Таким образом, р (круговая частота) – число колебаний за 2π секунд. Как найти эту величину? Пусть к упругой связи приложена в направлении колебания сила, равная весу тела. Под действием веса масса получит перемещение, которое можно определить, если воспользоваться формулой Максвелла – Мора. Но с другой стороны, если δ податливость упругой связи (удлинение от действия единичной силы), то если приложен вес G mg , то удлинение от действия этого веса будет: стат mg , откуда 1 g p . (6.7) стат m Пример. Постановка задачи Определить частоту собственных колебаний и число колебаний в минуту стержня, называемого виброметром (рис. 23.2) при следующих исходных данных: l = 20 см. – длина рабочей части; G = 0,1 кГ – вес рабочей части; Е = 2,2·106 кГ/см2 – модуль нормальной упругости материала b h 5 0,3 см2 – размеры поперечного сечения. Решение 1. Определяем статическое перемещение от действия силы тяжести. Для консольной балки длиной l, нагруженной поперечной силой G на незакреплённом конце балки прогиб определяется формулой (она нами была получена в разделе «Прогибы консольной балки»): © Учебный центр «Эрудит», www.childrensafety.jimdo.com , © Maria Bezmelnitsina Collé Техническая механика Лекция 5 9 G G l l б а Рис. 6.4 Виброметр и его расчётная схема стат Gl3 . 3EI Таким образом, 0,1 20 3 стат 0,0108 см 3 5 0 , 3 3 2,2 10 6 12 2. Определяем частоту собственных колебаний по формуле (6.7): p g стат 981 1 302 . 0,0108 сек 3. Определяем число колебаний в минуту. Собственная частота р – число колебаний за 2π секунд. Поэтому число колебаний в минуту: n © Учебный p 302 60 1 . 60 2880 2 2 3,14 мин центр «Эрудит», www.childrensafety.jimdo.com , © Maria Bezmelnitsina Collé