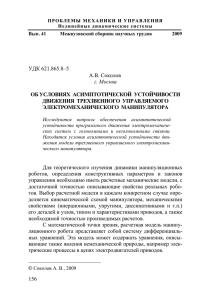
В Е С Т
advertisement

ВЕСТНИК ПЕРМСКОГО УНИВЕРСИТЕТА М атем ати ка. М е хан и ка. Ин форма тик а 2012 Вып.2(10) УДК 531.36 Обеспечение устойчивости программного движения электромеханического манипулятора А. В. Соколов Российский университет дружбы народов Россия, 117198, Москва, ул. Миклухо-Маклая, 6 kaf-tm@sci.pfu.edu.ru; (495) 955-07-78 Исследуются вопросы обеспечения асимптотической устойчивости программного движения электромеханических систем с голономными и неголономными связями. Находятся условия асимптотической устойчивости движения модели трехзвенного управляемого электромеханического манипулятора. Ключевые слова: движение системы тел; голономные и неголономные связи; асимптотическая устойчивость; трехзвенный электромеханический манипулятор. Введение 1. Условия асимптотической устойчивости движения управляемого электромеханического манипулятора Для изучения динамики манипуляционных роботов, определения конструктивных параметров и законов управления необходимо иметь расчетные механические модели, с достаточной точностью описывающие свойства реальных роботов. Выбор расчетной модели в каждом случае обусловлен кинематической схемой манипулятора, механическими свойствами (инерционными, упругими, диссипативными и т.п.) его деталей и узлов, типом и характеристиками приводов, а также необходимой точностью производимых расчетов. С математической точки зрения расчетная модель манипуляционного робота представляет собой систему дифференциальных уравнений. Эта модель может содержать уравнения, описывающие также явления немеханической природы, например, электрические процессы в цепях электродвигателей приводов. Поставим задачу нахождения условий, обеспечивающих асимптотическую устойчивость программного движения электромеханических систем с голономными и неголономными связями. Для электродвигателя постоянного тока с независимым возбуждением выполняются соотношения [1] L* d R* k 2 n* ku , dt 2 M * n* I 0 n* , (1.1) (1.2) где – угол поворота ведомой шестерни редуктора; n* – передаточное число редуктора (отношение числа зубьев ведомой и ведущей шестерен); L* и R * – соответственно коэффициент индуктивности и электрическое (омическое) сопротивление обмотки ротора электродвигателя; u – управляющее электрическое напряжение; – момент электромагнитных сил, создаваемых двигателем и приложенных к его ротору; I 0 – суммарный момент инерции ротора электродвигателя и ведущей шестерни редуктора относительно оси вращения; M * – момент сил реакции, дей- Работа выполнена при финансовой поддержке РФФИ, код 10-01-00381. © Соколов А. В., 2012 50 Обеспечение устойчивости программного движения… ствующих на ведущую шестерню; k – коэффициент, зависящий от напряжения на входе цепи возбуждения. Предположим, что это напряжение постоянно. Тогда k = const. При описании динамики манипуляционных роботов обычно используют уравнения Лагранжа второго рода: d L L M *. dt q q *i i ( * , q , q , t ), *i i ( * , * , q, q , q , t ), * (1 ,..., m ,1 ,..., m ,1 ,..., r ) , (0,0, q, q , q , t ) 0. (0, q , q , t ) 0 , где Правые части уравнений (1.7) можно выбрать так, чтобы их тривиальное решение 1 ... m 1 ... m 1 ... m 1 ... r 1 ... r 0 было асимптотически или экспоненциально устойчиво [4]. Будем считать, что из асимптотической или экспоненциальной устойчивости тривиального решения (1.3) Уравнения (1.1), (1.2) описывают электрические процессы, проходящие в электродвигателе звена манипулятора; (1.3) – динамику звена манипулятора. Аналогичные уравнения можно составить для каждого звена. Уравнения типа (1.1), (1.2), (1.3) можно объединить в систему [2]: dq dt q , ~ dq M 1 n * , dt d R* k 2 n* k * * q * u . L L L dt 0 уравнений (1.7) следует соответственно асимптотическая или экспоненциальная устойчивость интегрального многообразия (t ) . Подставим вместо выражение q (1.4) q Q q ,q , , полученное из (1.4).Тогда будем иметь f (q , t ) , f (q , q , t ) , (1.8) f (q , q , t ) , f (q , q , , t ) , f (q , q , , t ) . Заданной программой движения манипуляционной системы можно считать ограничения, наложенные на обобщенные координаты и скорости, которые в общем виде можно представить как совокупность уравнений голономных и неголономных связей: f (q , t ) 0 , f (q , q , t ) 0 , (1.5) Уравнения (1.7) подбираем так, чтобы они удовлетворяли системе дифференциальных уравнений: В [3] было показано, что для обеспечения асимптотической устойчивости интегрального многообразия (t ) , описываемого уравнениями (1.5), следует использовать вместо уравнений связей (1.5) уравнения программных связей: f (q , t ) , f ( q , q , t ) , f (q , q , t ) , f ( q , q , q , t ) , f (q , q , q , t ) . (1.7) d A11 A21 A31 A41 A51 , dt (1.9) d A 2 A 2 A 2 A 2 A 2 , 1 2 3 4 5 dt где матрицы имеют размерности: A01 , A11 , A21 – (mm), A31 , A41 – (mr), A02 , A12 , A22 – (rm), (1.6) A32 , A42 – (rr) – и состоят из коэффициентов, которые подбираются исходя из условий асимптотической устойчивости движения. Рассмотрим более подробно поиск коэффициентов (матриц коэффициентов) Aij в которых возмущения связей , , , , рассматриваются как переменные, удовлетворяющие дифференциальным уравнениям i 1,2 , j 1,...,5 из (1.9), которые подбираются из условий асимптотической устойчивости движения. 51 А. В. Соколов 2V T B 2 T C 2 T D (1.14) T E T G 2 T F T T T K 2 L M , Введем обозначения: , g , g 0 0 A A11 0 A2 1 1 0 A21 0 A22 0 1 A31 0 A32 0 0 A41 0 2 A4 где B,C,D,E,F,G,K,L,M – симметрические матрицы с постоянными коэффициентами. Сравнивая правые части в выражениях (1.12), (1.13), (1.14) для функций V, получим B C C E R D F 0 0 0 0 0 0 A51 . (1.10) 1 A52 (1.11) где в матрице A на соответствующих местах находятся соответствующие блок-матрицы. Функцию Ляпунова представим в виде 2V g T R g , (1.12) R11 ... R15 Rij , где R ... ... ... , R RT , R 51 ... R55 i, j 1,...,5 – блок-матрицы соответствующих размерностей. Так как векторы , , , , и матрицы Rij , i, j 1,...,5 состоят из скалярных функций и Rij равенства RTji , 0 K 0 L T M . и выПодставим в (1.16) вместо ражения из (1.9): то будут выполняться V T B T C T C T D T D ( A1 A1 A1 Rij T R ji . Отсюда T 1 A41 2 3 ) E F A51 T T T F ( A11 A21 A31 A41 A51 ) T G ( A11 A21 A31 A41 A51 ) T K T L Перепишем функцию Ляпунова (1.12) с учетом изложенного: 2V T R11 T R22 T R33 T R T R 2 T R 55 (1.15) T G (1.16) T F T F T K T L T L T Rij T R ji 2 T Rij . T L ( A12 A22 A32 A42 A52 ) T M A12 A22 A32 A42 A52 . (1.17) 12 2 T R13 2 T R14 T R15 (1.13) 2 T R23 2 T R24 2 T R 2 T R 25 G 0 0 0 0 . L M V T B T C T C T E T D T D следует, что 44 0 0 Таким образом, R11 B , R12 R21 C , R13 R31 D , R22 E , R23 R32 F , R33 G , R44 K , R45 R54 L , R55 M , остальные Rij 0 . Найдем производную V V . Для этого продифференцируем выражение (1.14). Получим Можно записать уравнения (1.9) в виде g A g , D F Производная от функции Ляпунова V имеет структуру вида 34 T R35 2 T R45 . V g T H g . Будем искать функцию Ляпунова V в виде [5] Распишем подробнее (1.18): 52 (1.18) Обеспечение устойчивости программного движения… V T , T , T , T , T H 11 H 21 H 31 H 41 H 51 H 12 H 22 H 32 H 42 H 52 H 13 H 23 H 33 H 43 H 53 B C T T где 2V1 , , C E D F H 15 H 25 H 35 H 45 H 55 H 14 H 24 H 34 H 44 H 54 12 DA11 FA11 1 GA1 22 14 H C DA31 E D FA31 F GA31 LA32 MA32 DA41 FA41 GA41 LA42 MA42 DA51 FA51 GA51 . K LA52 L MA52 i ( R) 0 , Тогда матрица Н будет иметь вид H 0 0 0 0 0 0 0 LA42 MA42 0 0 . 0 K LA52 L MA52 (1.22) Функцию Ляпунова V и ее производную V можно записать еще так: i 1,...,2m r . i ( H ) 0 , i – нечетное, i [1;2m r ] , j ( H ) 0 , j – четное, j [1;2m r ] . A41 0, A51 0, A12 0, A22 0, A32 0. (1.21) C E D FA31 F GA31 0 0 K LA52 . (1.23) L MA52 (1.24) 2) Отрицательная определенность матрицы H : главные миноры матрицы H удовлетворяют условию Рассмотрим случай, когда DA31 1) Положительная определенность матрицы R : главные миноры матрицы R удовлетворяют условию (1.20) B DA21 C FA21 GA21 C DA31 E D FA31 , F GA31 По теореме Ляпунова об асимптотической устойчивости будем добиваться положительной определенности функции V и отрицательной определенности функции V . Это эквивалентно требованию положительной определенности матрицы R и отрицательной определенности матрицы H . Перегруппируем слагаемые в выражении (1.17) к виду (1.19), тогда получаем вид матрицы Н: DA11 FA11 1 GA1 B DA21 C FA21 GA21 LA 2 V2 T , T 42 MA4 55 B DA21 C FA21 GA21 LA22 MA22 L , M 24 T H 34 T H 44 T H 54 ) ( T H15 T H 25 T H 35 T H 45 T H ) . DA11 FA11 1 GA1 LA12 2 MA1 D F , G V1 T , T , T T H 32 T H 42 T H 52 ) ( T H13 T H 23 T H 33 T H 43 (1.19) T H ) ( T H T H 53 K 2V2 T , T L ( T H11 T H 21 T H 31 T H 41 T H ) ( T H T H 51 T (1.25) Таким образом, мы будем иметь 2(2m r ) условий (1.24), (1.25) типа неравенств, наложенных на искомые коэффициенты матриц Aij , i 1,2 , j 1,...,5 , и на коэффициенты матриц B,C,D,E,F,G,K,L,M. В общем случае условий (1.24), (1.25) недостаточно для однозначного нахождения коэффициентов матриц Aij . Поэтому при решении конкретных задач произвольно выберем постоянные коэффициенты матриц B,C,D,E,F,G,K,L,M, а также используем дополнительные условия задачи. V V , , , , V1 , , V2 , , V V , , , , V1 , , V2 , , 53 А. В. Соколов Уравнения (1.8) примут вид 2. Исследование условий асимптотической устойчивости движения трехзвенного управляемого электромеханического манипулятора Найдем коэффициенты матриц f 1 (q , t ) 1 , f 1 (q , q , t ) 1 , f (q , q , t ) , 2 2 f 3 (q , q , t ) 3 , f 1 (q , q , , t ) 1 , f (q , q , , t ) 2 2 f 3 (q , q , , t ) 3 . Aij , обеспечивающих асимптотическую устойчивость движения, в задаче попадания схвата трехзвенного электромеханического манипулятора из произвольной точки X 0 ( x0 , y0 ) рабочей зоны – полуплоскость левее прямой x = 6 в точку X * (6,5) , минуя препятствие, которое ограничено замкнутой кривой : ( x 3) 2 ( y 3) 2 1 0 . К тому же потребуем, чтобы схват манипулятора во время движения был параллелен оси Ox . (2.2) Уравнения (1.9) примут вид 1 a11 1 a12 1 a131 a14 2 a a a , 16 2 17 3 15 3 2 a 21 1 a 22 1 a 231 a 24 2 (2.3) a a a , 25 3 26 2 27 3 3 a 31 1 a 32 1 a 331 a 34 2 a 35 3 a 36 2 a 37 3 . Уравнения (1.10) примут вид 1 0 0 0 0 0 0 0 1 0 0 0 0 0 a a a13 a14 a15 a16 a17 11 12 A 0 0 0 0 0 0 1 . (2.4) 0 0 0 0 0 0 1 a 21 a 22 a 23 a 24 a 25 a 26 a 27 a 31 a 32 a 33 a 34 a 35 a 36 a 37 Пример задания ограничения на движение схвата манипулятора Связи голономные и неголономные, накладываемые на движения манипулятора, имеют вид [6] Будем искать функцию Ляпунова V в виде (1.14) f1 Cos(q1 q 2 q3 ) 1 0, 2V 1 b 1 21 c 1 21 d 1 1 f 2 x ( x 6)( (( x 3) 2 ( y 3) 2 1) 8 ( y 3)(2 x 3 y 3)) 0, 1 f 3 y (2 x 3 y 3)( (( x 3) 2 ( y 3) 2 1) 24 1 (( x 3) 2 ( y 3) 2 1)( x 6) 0. 3 (2.1) 1 e 1 1 f 1 21 g 1 T K (2.5) 2 T L T M , 2 где, , b, c, d, e, f, g – постоянные ко 3 l k11 k12 l , L 11 12 , k 22 l 21 l 22 эффициенты, K k 21 где координаты схвата x и y выражаются с использованием кинематики через обобщенные координаты q (q1 , q2 , q3 ) : m M 11 m21 m12 – матрицы с постоянными m22 коэффициентами, причем k12 k 21 , l12 l 21 , m12 m21 . x L1Cosq1 L2 Cos(q1 q2 ) L3Cos(q1 q2 q3 ) y L1Sinq1 L2 Sin(q1 q2 ) L3 Sin(q1 q2 q3 ). 54 Обеспечение устойчивости программного движения… В уравнении (1.12) матрица R будет иметь вид b c d R 0 0 0 0 d 0 0 0 e f f g 0 0 0 0 0 0 0 0 k11 k12 l11 0 0 0 0 k 21 l11 k 22 l12 l 21 m11 0 0 l 21 l 22 m 21 0 0 0 l12 l 22 m12 m 22 0 . R2 H da11 b da12 fa11 c fa12 ga ga12 11 0 0 0 0 (2.6) 1 и выПодставим в (2.7) вместо ражения из (2.3). Производная от функции V Ляпунова имеет структуру вида T V g H g , где из (1.20) получаем матрицу Н вида 0 LA42 MA42 1 1 2 a15 , A51 a16 (2.10) 1 2 3 2 b 1 c d c e f d 1 f 1 , g 1 k11 k 12 l 11 l 12 dA51 fA51 gA51 . K LA52 L MA52 (2.8) k12 l11 k 22 l12 l12 m11 l 22 m12 3 l12 2 l 22 3 , m12 2 m22 3 (2.11) V1 1 1 1 da 11 b da 12 fa11 c fa12 ga ga 12 11 Здесь A41 a14 0 . H 2 2V2 2 3 2 3 H dA41 fA41 gA41 LA42 MA42 1 где 2V1 1 L M . T b da12 c da13 c fa12 e d fa13 ga12 f ga13 2 LA2 LA32 MA22 MA32 f ga13 0 0 0 K LA52 L MA52 0 0 V V 1 , 1 , 1 , 2 , 3 , 2 , 3 V1 1 , 1 , 1 V2 2 , 3 , 2 , 3 , V V 1 , 1 , 1 , 2 , 3 , 2 , 3 V , , V , , , , 1 da11 fa11 ga11 LA12 2 MA1 0 0 Функцию Ляпунова V и ее производ ную V можно записать еще так: V 1 b 1 1 c 1 1 c 1 1 d 1 1 d 1 1 e 1 1 f 1 1 f 1 (2.7) g T K T L T c da13 e d fa13 H H 1 0 или Найдем производную V . Для этого дифференцируем выражение (2.5). Получим 1 (2.9) Тогда матрица Н будет иметь вид c R R 1 0 или A41 0, A51 0, A12 0, A22 0, A32 0. 2V g T R g , a17 , V2 2 a a a A12 21 , A22 22 , A32 23 , a 31 a 32 a 33 a 25 a 27 a a , A52 26 . A42 24 a34 a35 a36 a37 где Рассмотрим случай, когда 55 3 2 H112 2 H 21 H 2 : H2 2 H 31 H2 41 c da 13 1 e d fa13 1 , f ga 13 1 2 3 H 2 3 . 2 3 H122 H 222 H 322 H 422 H132 H 232 H 332 H 432 H142 H 242 , H 342 H 442 А. В. Соколов H 112 l11a24 l12 a34 H 122 l11 a 25 l12 a 35 H 212 l12 a24 l22 a34 H 222 l12 a 25 l 22 a 35 H 312 m11a24 m12 a34 H 322 m11 a 25 m12 a 35 H 412 m12 a24 m22 a34 , H 422 m12 a 25 m 22 a 35 , H132 k11 l11a26 l12a36 H 142 k12 l11 a 27 l12 a 37 H 232 k12 l12a26 l22a36 H k 22 l12 a 27 l 22 a 37 Найдем частное решение задачи поиска коэффициентов a ij , обеспечивающих асимптотическую устойчивость заданного движения манипулятора. Выберем коэффициенты b, c, d, e, f, g: b = 8, c = 3, d = 2, e = 4, f =1, g =5. (2.14) Матрица R1 будет иметь вид 2 24 8 3 2 R1 3 4 1 . 2 1 5 H l11 m11a26 m12a36 H l12 m11 a 27 m12 a 37 2 33 2 34 H 432 l12 m12a26 m22a36 , H 442 l 22 m12 a 27 m 22 a 37 . По теореме Ляпунова об асимптотической устойчивости будем добиваться положительной определенности функции V и отрицательной определенности функции V . Это эквивалентно требованию положительной определенности матрицы R и отрицательной определенности матрицы H . Так как V V1 V2 и V V1 V2 , будем добиваться положительной и отрицательной определенности квадратичных форм V1 ,V2 и V1 ,V2 , имеющих вид (2.11) и содержащих коэффициенты Условия положительной определенности матрицы R1 в (2.12) выполняются. Матрица H 1 будет иметь вид 2a 11 8 2a12 H 1 a 11 3 a12 5a 5a 12 11 a11 , a12 , a13 , a24 , a25 , a26 , a27 , a34 , a35 , a36 , a37 . 1) Для положительной определенности квадратичной формы V1 и отрицательной определенности квадратичной формы V необходима положительная и отрицательная определенность матриц R1 и H1 . Из этих условий следует a11 3 , a12 2 , a13 1 . Тогда 4 5 6 H1 3 1 7 . 15 10 6 (2.15) Пусть k11 6 , k 22 5 , k12 2 , l11 1, l 22 1 , m11 4 , m22 3 , l12 m12 0 . (2.16) (2.12) Матрица R2 будет иметь вид 6 2 R2 1 0 2) Для положительной определенности квадратичной формы V2 и отрицательной определенности квадратичной формы V 2 необходима положительная и отрицательная определенность матриц R 2 и H 2 . Из этих условий следует 1 ( R2 ) 0 1 ( H 2 ) 0 ( R ) 0 ( H ) 0 2 2 2 2 и . 3 ( R2 ) 0 3 ( H 2 ) 0 4 ( R2 ) 0 4 ( H 2 ) 0 Пусть Условия отрицательной определенности матрицы H 1 в (2.12) выполняются. 1 1 ( R1 ) 0 1 ( H 1 ) 0 2 ( R1 ) 0 и 2 ( H 1 ) 0 . ( R ) 0 ( H ) 0 3 1 3 1 3 2a 13 6 a13 . 1 5a 13 2 5 0 1 1 0 4 0 0 1 . 0 3 Условия положительной определенности матрицы R 2 в (2.13) выполняются. Матрица H 2 будет иметь вид a 24 a H 2 34 4a 24 3a 34 (2.13) 56 a 25 6 a 26 2 a 27 a35 2 a36 5 a37 . 4a 25 1 4a 26 4a 27 3a35 3a36 1 3a37 Обеспечение устойчивости программного движения… Пусть Список литературы a 24 7 , a25 0 , a 26 4 , a 27 2 , a34 2 , a35 6 , a36 0 , a 37 2 . (2.17) 1. Чиликин М.В., Ключев В.И., Сандлер А.С. Теория автоматизированного электропривода. М.: Энергия, 1979. 2. Соколов А.В. Об управлении движением электромеханического манипулятора // Проблемы механики и управления. Пермь, 2003. Вып. 35. С. 136–151. 3. Мухарлямов Р.Г. Математическое моделирование динамики несвободных механических систем // Вестн. Рос. ун-та дружбы народов. Сер.: Прикл. математика и информатика. 1996. № 1. С.31–37. 4. Мухарлямов Р.Г. О построении множества систем дифференциальных уравнений устойчивого движения по интегральному многообразию // Дифференц. уравнения, 1969. Т. 5, № 4. С. 688–699. 5. Программное движение механических систем / под. ред. А.С.Галиуллина. М., 1971. 158 с. 6. Соколов А.В. Управление программным движением многозвенного манипулятора // Проблемы механики и управления. Пермь, 2002. Вып. 34. С. 76–93. Условия отрицательной определенности матрицы H 2 в (2.13) выполняются. Таким образом, мы нашли все искомые коэффициенты a ij , i 1,2,3 , j 1,...,7 , при помощи которых будет обеспечиваться асимптотическая устойчивость заданного движения (2.1) трехзвенного электромеханического манипулятора. В результате матрица коэффициентов a ij из (2.4) примет вид 1 0 0 0 3 2 A 0 0 0 0 0 0 0 0 0 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 . (2.18) 0 0 0 1 7 0 4 2 2 6 0 2 0 0 0 The stability movement of the electromechanical manipulator A. V. Sokolov Peoples’ Friendship University of Russia, 117198, Moscow, Miklukho-Maklay st., 6 kaf-tm@sci.pfu.edu.ru; (495) 955-07-78 Questions of asymptotical stability of program movement of electromechanical robots are designed. Dynamics described by systems of the equations of the third order. Influence of resistance of environment is considered at control of the electromechanical manipulator. Key words: dynamics; stability; manipulating systems. 57