Теория измерений. Основы теории точностисредств измерений
advertisement

В.Н. Романов
ТОЧНОСТЬ СРЕДСТВ
ИЗМЕРЕНИЙ
Санкт - Петербург
2006
Федеральное агенство по образованию
Государственное образовательное учреждение высшего профессионального образования
СЕВЕРО-ЗАПАДНЫЙ ГОСУДАРСТВЕННЫЙ ЗАОЧНЫЙ
ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
В.Н. Романов
Точность средств измерений
Изд. 2-е, дополненное
Санкт-Петербург
2006
Утверждено редакционно-издательским советом университета
УДК 681. 518
Романов В.Н. Теория измерений. Основы теории точности
средств измерений. – СПб.: СЗТУ, 2006. – 154 с.
Учебник разработан в соответствии с требованиями
государственных
образовательных
стандартов
высшего
профессионального образования по направлению подготовки
дипломированного специалиста 653700 – «Приборостроение»
(специальность 190100 – «Приборостроение») и направлению
подготовки бакалавров 551500 – «Приборостроение».
В книге рассмотрены основные вопросы теории точности
средств измерений: характеристики погрешности средств
измерений (СИ) и способы их нормирования, естественные
пределы точности средств измерений, методы анализа и оценки
точности функционирования СИ, методы синтеза СИ,
структурные и алгоритмические методы повышения точности и
помехоустойчивости СИ.
Учебное издание предназначено для студентов четвертого
курса, изучающих дисциплину «Точность измерительных
устройств». Оно может быть использовано студентами,
специализирующимися в области приборостроения, метрологии
и измерительной техники, а также преподавателями вузов и
аспирантами.
Рецензенты: Кафедра автоматизации химико-технологических
процессов СПб. гос. университета растительных полимеров (зав.
кафедрой Г.А. Кондрашкова, д-р техн. наук, проф.); Э.И.
Цветков, д-р техн. наук, проф. кафедры ИИТ СПб. гос.
электротехнического университета.
© Романов В.Н., 2006
© Северо-Западный государственный заочный технический университет, 2006
Введение
Нет необходимости доказывать важность измерений для
современной научной и практической деятельности. Достаточно
сказать, что в России ежедневно выполняется более миллиона
измерений, проводимых с помощью специальных измерительных
приборов, устройств, систем. Поэтому разработка и создание
средств измерений (СИ) является одним из основных
направлений научно-технического прогресса, тесно связанным с
развитием науки и технологии.
Наблюдается постоянная тенденция возрастания требований
к точности и достоверности измерений и, соответственно, к
совершенствованию измерительной техники. В последние
десятилетия существенный скачок в развитии средств измерений
связан с успехами естественных наук (физики, химии,
математики). Здесь прежде всего следует отметить открытие и
освоение так называемых макроскопических квантовых эффектов
(эффект Мейснера, эффект Джозефсона, квантовый эффект
Холла и т.д.), а также широкое применение мощных когерентных
источников излучения в оптическом и радиодиапазоне, прежде
всего разработку лазерной спектроскопии высокого разрешения
(ЛСВР), включающую спектроскопию
поглощения, гамма
спектроскопию и т.п. Использование перечисленных эффектов
дает возможность достижения предельной точности измерений,
определяемой ограничениями фундаментального характера
(принцип неопределенности В. Гейзенберга).
Среди факторов, оказавших значительное влияние на
развитие приборостроения и измерительной техники, следует
отметить принципиально новые подходы по использованию
средств вычислительной техники (СВТ), в частности, введение
СВТ в измерительную цепь и распространение СВТ на функции
управления экспериментом и принятие решений. Это сделало
возможным переход к созданию нового поколения СИ, а именно,
интеллектуальных средств измерений (интеллектуальных
датчиков-сенсоров и компьютерных измерительных систем,
использующих базы знаний и нейронные сети), которые
представляют собой многофункциональные измерительные
системы, отличающиеся от обычных средств измерений тем, что
могут выбирать оптимальный алгоритм измерения в зависимости
от условий задачи. Еще одним фактором, влияющим на развитие
средств измерений, является удовлетворение возрастающих
требований науки и промышленности к качеству измерений,
прежде всего к их точности и достоверности, что обусловливает
постоянный поиск новых принципов при создании средств
измерений. Таким образом, отмеченные факторы: выход на
естественные пределы точности измерений, компьютеризация
средств
измерений
и
появление
интеллектуальных
измерительных систем, а также возрастание требований к
качеству измерений, приводят к тому, что проблема точности
средств измерений при функционировании и проектировании
становится ключевой проблемой приборостроения. При ее
решении необходимо использование, наряду с традиционным
математическим
аппаратом
теории
вероятностей
и
математической статистики, теории информации, теории
планирования эксперимента, таких областей как системный
анализ, теория множеств (в том числе, теория нечетких
множеств), функциональный анализ, теория оптимальных
алгоритмов, теория искусственного интеллекта, методы
инженерии знаний и др.
Настоящее пособие имеет целью познакомить студентов как
с классическими результатами по теории точности средств
измерений, так и с новейшими достижениями в этой области. Это
потребовало переработки большого объема информации, в
частности, публикаций, относящихся как непосредственно к
оценке точности измерений, так и к смежным областям физики и
математики, без которых изложение было бы неполным и
недостаточно ясным.
Глава 1. Общие сведения о погрешностях и способах их
нормирования
1.1. Два подхода к оценке точности измерения:
погрешность и неопределенность
В настоящее время существует два альтернативных
подхода к оценке точности измерений. Первый – традиционный,
опирающийся на классические курсы теории вероятностей и
математической статистики, использует понятие погрешность
(ошибка); он достаточно подробно и систематически рассмотрен
в литературе (см., например, [22, 26, 42, 44]). Второй подход был
предложен английскими учеными сравнительно недавно, однако
быстро приобрел множество сторонников. Объясняется это тем,
что первый подход требует для практических расчетов
информации о виде закона распределения результатов
измерений, что не всегда возможно. Кроме того в нем
используются громоздкие и слабо обоснованные схемы сложения
ошибок разной природы (случайных и систематических). С
появлением средств измерений нового поколения, в частности,
интеллектуальных, а также виртуальных (компьютерных) систем,
в которых используются знания разного характера (как
количественные так и качественные), проявились отмеченные
слабости и неудобство первого подхода. Поэтому как
альтернативный ему был разработан второй подход, получивший
в настоящее время широкое распространение, поддержанный
рядом авторитетных международных организаций и многими
национальными лабораториями. Ниже рассмотрены основные
положения этого подхода, изложенные в международном
стандарте [27].
Основными его идеями являются, во-первых, замена понятий
«погрешность» и «истинное значение измеряемой величины»
понятиями «неопределенность» и «оцененное значение
измеряемой величины»; во-вторых, переход от разделения
погрешностей по природе их проявления (на случайные и
систематические) к разделению по способу оценивания
неопределенностей измерений (по типу А – методами
математической статистики, и по типу В – другими методами).
Отказ от использования понятия погрешность результата
измерения мотивируется тем, что оно опирается на понятие
истинного значения, которое принципиально не может быть
определено.
Основным
понятием
является
понятие
«неопределенность измерения»1. В качестве характеристик не-
1
Следует отметить двусмысленность, обусловленную языковым несоответствием, возникающим
при переводе термина «неопределенность с английского на русский. Слово неопределенность
(uncertainty) в английском языке используется в двух смыслах. Первый относится к значению
элемента информации и является синонимом понятий неточность, неясность. Второй относится
к достоверности элемента информации и соотносится с понятиями недостоверность,
сомнительность, ненадежность. В излагаемом ниже подходе слово неопределенность
используется в первом смысле.
определенности предлагается использовать стандартную
неопределенность, суммарную неопределенность и расширенную
неопределенность. Оценки перечисленных неопределенностей
получаются из экспериментальных данных (оценки по типу А) и
на основе дополнительной, в том числе экспертной, информации
(оценки по типу В). Для описания неопределенностей
применяется статистический подход независимо от способа их
оценивания (при этом считается, что все поправки на
систематические погрешности уже введены). В качестве оценки
неопределенности измерения обычно используется расширенная
неопределенность, а для промежуточных величин, на основе
которых
получают
результат
измерения,
вычисляются
стандартная неопределенность (и) и суммарная стандартная
неопределенность (иs). Расширенная неопределенность ua
вычисляется по формуле: ua = k·иs, где k – числовой
коэффициент, называемый коэффициентом охвата.
Рассмотрим процедуру оценки неопределенностей более
подробно. Уравнение измерения имеет вид: y = f(x1,…, xm), где y
– измеряемая величина, x1,…,xm – входные величины:
непосредственно измеряемые или другие величины, влияющие на
результат измерения; m – число входных величин; f – вид
функциональной зависимости.
Оценку измеряемой величины y вычисляют как функцию
оценок входных величин x1,…, xm после внесения поправок на
все известные систематические эффекты. На следующем этапе
рассчитываются стандартные неопределенности
входных
величин u(xi) и коэффициенты корреляции r(xi, xj) оценок i-ой и
j-ой входных величин (i = 1,…, m ; j = 1,…, m).
Различают два типа оценок стандартной неопределенности:
-оценка по типу А – получение статистических оценок
дисперсий распределения вероятностей на основе результатов
измерений;
-оценка по типу В – получение дисперсий на основе
априорной нестатистической информации.
Расчет стандартной неопределенности и учитывает как
оценки по типу А, так и оценки по типу В. Исходными данными
для расчета стандартной неопределенности по типу А являются
результаты многократных измерений: xi1, xi2, …, ( i = 1,…, m).
Стандартная неопределенность l-го единичного измерения
(l=1,…, ni) вычисляется по формуле:
u ( xil ) = u A ( xil )
n
(
1 i x − x
=
iq
i
ni −1 ∑
q =1
)
2
,
(1.1.1)
n
где
i
xi = 1 ∑ xiq , ni – число измерений переменной xi.
ni q=1
Стандартная неопределенность результата измерения xi = xi ,
вычисленного как среднее арифметическое, равна:
n
(
)
i
2
1
u ( xi ) = u A ( xi ) =
x
−
x
∑
i .
ni ( ni −1) q=1 iq
(1.1.2)
Исходными
данными
для
оценки
стандартной
неопределенности по типу В является следующая априорная
информация:
- данные предшествовавших измерений величин, входящих в
уравнение измерения; сведения о виде распределения
вероятностей;
- данные, основанные на опыте исследователя а также общие
знания о поведении и свойствах соответствующих приборов и
материалов;
- значения констант и справочных данных;
- данные поверки, калибровки, сведения изготовителя о
приборе и др.
Неопределенности данных для такой информации обычно
представляют в виде границ отклонения входной величины от ее
оценки.
В случае неизвестного закона распределения
вероятностей наиболее часто используется для аппроксимации
равномерный закон распределения1 в заданных (нижней и
верхней) границах (bi–, bi+) для i-ой входной величины. При этом
стандартная неопределенность, оцениваемая по типу В,
определяется по формуле:
bi+ − bi−
.
2 3
u ( xi ) = uB ( xi ) =
(1.1.3)
Для симметричных границ (± bi ) :
u ( xi ) = uB ( xi ) = b
Для
оценки
3
.
(1.1.4)
коэффициента
корреляции
используются
согласованные пары результатов измерений (xik , x jk ); k=1,…, n:
n
(
)
r xi , x j =
xik − xi ) ⎛⎜ x jk − x j ⎞⎟
(
∑
⎝
⎠
k =1
n
n
xik − xi ) ∑ ⎛⎜ x jk − x j ⎞⎟
(
∑
⎠
k =1
k =1 ⎝
2
2
,
(1.1.5)
где n – число совместных измерений (оценок) величин xi, xj. Для
случая качественных экспертных оценок в виде рангов следует
использовать коэффициент ранговой корреляции Спирмена [40].
1
При использовании других модельных законов распределения (треугольного, трапецеидального)
выражения для оценок неопределенности по типу В будут иными [42].
После
этого
вычисляют
суммарную
стандартную
неопределенность us. В случае некоррелированных оценок
x1,..., xm
суммарная стандартная неопределенность вычисляется
по формуле:
m ⎛
⎞
us2 ( y ) = ∑ ⎜ ∂f ⎟
⎜
⎟
i =1 ⎝ ∂xi ⎠
2
u2
( xi )
,
(1.1.6)
а при наличии корреляции:
us2
m ⎛
2
(
)
( )
m m
⎞
∂
f
2
⎜
⎟
( y ) = ∑ ⎜ ∂x ⎟ u ( xi ) + ∑∑ ∂∂xf ∂∂xf r xi , x j u ( xi ) u x j ,
j
i =1 ⎝ i ⎠
i =1 j =1 i
(1.1.7)
где r (xi , x j ) – коэффициент корреляции, u (xi ) – стандартная
неопределенность i-ой входной величины, оцененная по типу А
или по типу В.
Коэффициент охвата k при оценке расширенной
неопределенности в общем случае дается выражением: k=tP(νeff),
где tP(νeff) – квантиль распределения Стьюдента с эффективным
числом степеней свободы νeff и уровнем доверия P:
veff =
us4
,
4
m u4 ( x ) ⎛
∂f ⎞⎟
i
⎜
∑
⎜ ∂xi ⎟
i =1 vi
⎝
⎠
(1.1.8)
где ν eff = n −1 (число степеней свободы).
Значения коэффициента tP(n-1) приведены в [22, 42, 45]. В
частности, для практически важных случаев k полагают равным:
k = 2 при P=0,95 и k = 3 при P=0,99.
Таким образом, изложенный подход распространяет гауссов
закон сложения ошибок, характерный для случая косвенных
измерений при условии нормального распределения результатов
имерений (оценка по типу А), на случай оценки по типу В. В
последнем случае ni равно числу свидетельств для переменной
xi. Если же используются нестатистические данные, то число
степеней свободы полагается равным ni=∞ , что соответствует
теоретическому значению.
При представлении результата измерения с использованием
неопределенности
рекомендуется
привести
количество
информации, достаточное для обеспечения возможности
повторить весь процесс оценивания, а именно: алгоритм
получения результата измерения; алгоритм расчета всех
поправок и их неопределенностей; оценки неопределенностей
всех используемых данных и способы их получения; алгоритм
вычисления суммарной неопределенности и расширенной
неопределенности (включая значение коэффициента k).
Сравнительный анализ двух подходов показывает, что
подход на основе неопределенности является более общим, чем
подход на основе погрешности, так как он применим и для
количественной статистической информации,
и для
качественной нестатистической, например, в виде свидетельств
или оценок экспертов, справочных данных и т.п.
1.2. Нормирование метрологических характеристик средств
измерений
Под нормированием понимается установление пределов,
следовательно, нормирование метрологических характеристик
средств измерений (СИ) означает установление пределов их
изменения, а к нормируемым характеристикам относятся такие
показатели, которые определяют качество функционирования
СИ. Как правило, метрологические характеристики служат для
описания СИ определённого типа, например аналоговые
приборы, меры, цифровые приборы и т.п., однако, в особо
ответственных случаях эти характеристики устанавливают для
конкретных экземпляров СИ (например, для образцовых СИ, для
сложных системных СИ, в частности, интеллектуальных).
Нормируемые метрологические характеристики прежде всего
должны давать возможность оценивать результат измерения и его
точность при применении СИ данного типа, поэтому наиболее
важными характеристиками СИ являются характеристики
погрешности измерений.
В общем виде результат измерений y(t) в момент времени t
можно представить в виде:
y(t ) = f [ x(t −τ ),ϕi , Z ] ,
(1.2.1)
где x(t–τ) – значение измеряемой величины в момент t–τ , f(x) –
характеристика преобразования СИ; ϕi – значения влияющих
величин или неинформативных параметров входного сигнала; τвремя запаздывания (реакция СИ); Z – взаимодействие СИ с
объектом измерения (например, потребление мощности).
Действительное значение измеряемой величины можно
получить, если характеристики преобразования и все влияющие
величины будут иметь номинальные значения, т.е. τ=0; Z=0:
yд(t)=fном (x(t), ϕ i ном , 0). Разлагая y(t) в ряд Тейлора до второго
порядка малости по ∆y = y(t)-yд(t), имеем:
n
Δy(t ) = (∂y / ∂f )δ f + ∑ (∂y / ∂ϕi )δϕi + (∂y / ∂t )τ +
i =1
+(∂y / ∂Z )δ Z + o(Δy),
(1.2.2)
где Δf= f-fном; Δϕi =ϕi-ϕi ном.
В этом выражении представлены все группы погрешностей.
Первый член даёт основную погрешность СИ, обусловленную
неидеальностью собственных свойств СИ, т.е. отличием реальной
характеристики преобразования f от номинальной fном (или
отличием действительного значения меры от номинального
значения). Второй член содержит дополнительные погрешности –
погрешности результата измерений, обусловленные реакцией СИ
на изменение влияющих величин и неинформативных
параметров входного сигнала относительно номинальных
значений. Третий член представляет динамическую погрешность,
т.е. погрешность, обусловленную инерционностью СИ и
скоростью изменения входного сигнала. Отметим, что
динамическая погрешность СИ может быть вызвана разными
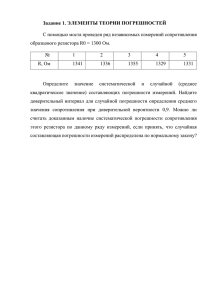
причинами. Например, для цифровых измерительных приборов
(ЦИП) различают динамическую погрешность 1-го и 2-го рода.
Погрешность 1-го рода обусловлена инерционностью элементов
измерительной части прибора. Динамическая погрешность 2-го
рода возникает из-за того, что измерение проводится в момент t2
а результат приписывается либо началу цикла преобразования t1,
либо концу t3. Это приводит к погрешностям ∆х1 или ∆х2
соответственно (см. рис.1). Максимальная приведённая
динамическая погрешность второго рода: ε (t)=±Δx/xm=x'Tц/xm,
где ∆х–максимальное изменение величины х(t) за время Тц; xm–
максимальное значение x(t); x' – средняя скорость изменения х(t)
за время Тц. Например, для
x(t)=A sinωt
динамическая
ε (t)=ωТц. Таким образом,
погрешность второго рода:
динамические погрешности ограничивают допустимую частоту
или скорость изменения измеряемой величины х(t) при заданном
цикле Тц.
x
Δx1
x(t)
Δx2
t1
t2
t3
t
Рис.1. Динамическая погрешность 2-го рода в ЦИП: Tц=t3-t2.
Четвёртый член содержит погрешность, обусловленную
взаимодействием СИ с объектом измерений (или другим
компонентом измерительной цепи).
Все погрешности, кроме первой, связаны не только со
свойствами СИ, но и с условиями измерений. В связи с этим при
нормировании метрологических характеристик на этапе
проектирования и создания СИ закладывается основа для
эксплуатации СИ в разных условиях. Метрологические
характеристики конкретного СИ постоянны в данный момент, но
с течением времени они изменяются из-за износа, старения,
регулировки элементов, а по совокупности СИ данного типа они
являются случайными из-за разброса параметров при
изготовлении и условий эксплуатации. Поэтому при
нормировании метрологических характеристик должна быть
предусмотрена возможность оценки соответствия конкретного
СИ установленным нормам, а также оценки предельной
погрешности при использовании данного СИ (для этой цели
лучше всего подходит предел допускаемых значений
метрологической характеристики). Кроме того должна быть
предусмотрена возможность
определения
вероятностных
характеристик
распределения
погрешности
результата
измерений, проводимых любым СИ данного типа (для этого
проводят усреднение значений метрологической характеристики
по группе СИ). Последнее связано с необходимостью для
изготовителя проведения значительного числа испытаний, что не
всегда оправдано для СИ, эксплуатируемых в традиционных
условиях. Метрологические характеристики СИ (МХ СИ ),
регламентируемые в ГОСТ 8.009-84[17], используются для
определения результатов измерений и расчётной оценки
характеристик инструментальной составляющей погрешности
измерений, расчёта метрологических характеристик каналов
измерительных систем, оптимального выбора СИ и контроля СИ
на
соответствие
установленным
нормам.
Комплекс
метрологических характеристик конкретных СИ должен быть
достаточен для оценок погрешностей результатов измерений в
реальных условиях применения. МХ СИ следует выбирать так,
чтобы контроль СИ можно было осуществлять при приемлемых
затратах.
Комплекс нормируемых МХ (НМХ) выбирается из
следующего ряда характеристик (в соответствии с ГОСТ 8.00984).
Характеристики для определения результата измерений (без
введения поправок). К ним относятся функция преобразования
измерительного преобразователя или измерительного прибора с
наименованной шкалой f(x) и значение однозначной или значения
многозначных мер. Для этих характеристик нормируются
номинальные значения или функции. Например, ГОСТ 6651-84
«Термопреобразователи
сопротивления»
нормирует
номинальную функцию преобразования R(t)=W(t)·R(0), где R(0)сопротивление преобразователя при 0°С, W(t)- коэффициент,
зависящий от температуры. Допускается не нормировать
номинальные характеристики отдельных СИ, имеющих
индивидуальные характеристики. В этих случаях нормируют
пределы, в которых должна находиться индивидуальная
характеристика. Нормируется также цена деления шкалы
измерительного прибора или многозначной меры, вид выходного
кода, число разрядов кода, цена единицы наименьшего разряда
кода СИ, предназначенных для выдачи результатов в цифровом
коде. Например, ГОСТ 13837-79 «Динамометры общего
назначения» нормирует нижний предел минимальной цены
деления динамометров как 0,01 от наибольшего предела
измерений.
Характеристики погрешности СИ. К ним относятся
характеристики систематической и случайной составляющих
погрешности и случайной составляющей погрешности от
гистерезиса, либо характеристики погрешности СИ (если
нецелесообразно разделение). Нормируемыми характеристиками
систематической составляющей Δs погрешности являются её
предельные значения Δsp либо значения Δsp с математическим
ожиданием M[Δs] и стандартным отклонением (СТО) σ[Δs]
распределения Δs по совокупности СИ данного типа. Величины
M[Δs] и σ[Δs] указывают для СИ, выпускаемых партиями, если
их можно использовать для оценки погрешности измерений (т.е.
можно пренебречь их изменениями от времени и влияющих
величин или возможно их нормирование в виде функций времени
и условий применения). В остальных случаях нормируют
пределы Δsp. Их определяют как границы интервала, в котором
значение Δs всех СИ данного типа должно иметь вероятность
P=1. Вероятность P=1 не контролируется, но по условию |Δs| ≤
|Δsp| проводится отбраковка неправильных СИ при приёмосдаточном контроле или поверке. На практике, зная
распределение Δs можно установить границы по заданной P.
Например,
для случайного распределения при P=0,997:
Δsp=M[Δs]±3 σ[Δs].
Нормируемой характеристикой случайной составляющей Δst
погрешности СИ является предел σp[Δst] допускаемых значений
СТО σ[Δst]. Если СИ предназначено для работы в условиях, при
которых необходимо учитывать корреляцию случайной
погрешности во времени, дополнительно может нормироваться
нормализованная автокорреляционная функция rst[τ] или
функция спектральной плотности Sst (ω).
Нормируемой характеристикой случайной составляющей (ΔH)
погрешности от гистерезиса является предел (без указания знака)
вариации Hp выходного сигнала или показаний СИ.
Характеристикой погрешности СИ (при нормальных или рабочих
условиях применения) является значение погрешности. При её
нормировании устанавливают пределы (положительные и
отрицательные) Δp допускаемой погрешности и предел Hp
допускаемой вариации. Нормирование пределов Δp допускаемой
погрешности СИ без указания составляющих погрешности –
наиболее простой и удобный для контроля способ нормирования.
Это допустимо в следующих случаях:
1).СТО в каждой точке диапазона измерений не превышает
установленной доли предела допускаемой погрешности σ[Δst]≤
Δp qmax/100;
2). СИ предназначено для совместного применения с другими
СИ, и его погрешность в рабочих условиях применения
практически
полностью
может
быть
определена
нормированными границами
(верхней и нижней: Δв, Δн),
соответствующими нормальным условиям. Например, для
штриховых мер длины, обладающих незначительной случайной
погрешностью, нормируют предел допускаемой основной
погрешности Δр. Силоизмерительные машины, напротив,
характеризуются существенной случайной погрешностью,
поэтому
для
них
определяется
предел
допускаемой
систематической погрешности Δsp=0,12% и предел допускаемых
значений СТО случайной погрешности σp[Δst] = 0,1% в диапазоне
до 20% от верхнего предела измерений и 0,05% в диапазоне
свыше 20%.
Допускается нормирование функций или плотностей
распределения систематической или случайной составляющей
погрешностей СИ. Знание распределений позволило бы
определить M[Δs], σ [Δs] и σ p(Δst) и доверительные интервалы
для погрешности СИ, что повысило бы качество решения многих
задач. Однако такое нормирование требует проведения большого
объёма испытаний и на практике применяется редко.
Характеристики чувствительности СИ к влияющим величинам.
К ним относятся функции влияния f(ϕ) либо изменения ε(ϕ)
значений МХ, вызванные изменениями влияющих величин в
установленных
пределах.
При
нормировании
задают
номинальную функцию влияния fs(ϕ) и пределы допускаемых
отклонений от неё или верхнюю f*(ϕ) и нижнюю
f*(ϕ)
граничные функции влияния. Номинальные функции влияния
служат для определения поправок к результатам измерений,
обусловленных отличием значений влияющих величин от
номинальных. Пределы допускаемых
отклонений f(ϕ) от
номинальной функции fs(ϕ) используют для контроля качества
СИ. Если у СИ одного типа велик разброс функций влияния
(>20% от номинального значения), то определение поправок с
учётом номинальной функции может привести к существенной
погрешности в результатах измерений. Поэтому для отдельных
СИ целесообразно указывать индивидуальные функции влияния,
а граничные функции влияния нормировать для типа СИ.
Изменения ε(ϕ) значений метрологических характеристик,
вызванные изменениями влияющих величин, нормируют путём
установления пределов εp(ϕ) (положительных и отрицательных)
допускаемых изменений характеристики при изменении
влияющих величин
в заданных пределах (т.е. пределов
допускаемой дополнительной погрешности СИ). f(ϕ) и εp(ϕ)
нормируют отдельно для каждой величины или для нескольких
величин, если это необходимо для повышения точности
измерений. Так, для измерительных потенциометров постоянного
тока нормируют пределы дополнительных погрешностей от
действия температуры окружающей среды,
напряжения,
коэффициента искажения вспомогательного источника питания
(если он есть) и внешнего магнитного поля.
Динамические характеристики СИ. Различают полную
динамическую характеристику, адекватно описывающую
динамические свойства СИ, и частную, являющуюся
функционалом или параметром полной. Полная динамическая
характеристика устанавливается для линейных аналоговых СИ.
Нормирование
частной
динамической
характеристики
допускается, когда она достаточна для учёта динамических
свойств СИ при его применении. К частным характеристикам
относятся: время реакции (время установления показаний или
выходного сигнала) tr; коэффициент демпфирования γdam в
x′′ + 2γ damϖ 0 x′ + ϖ 02 x = 0 ,
дифференциальном
уравнении:
описывающем линейное СИ второго порядка; значение
резонансной собственной частоты ω0; постоянная времени Т;
максимальная частота (скорость) измерений fmax ;
Динамические
характеристики
нормируют
путём
установления номинальной характеристики и пределов
(положительных и отрицательных) допускаемых отклонений от
неё. Для СИ с большим разбросом динамических характеристик
по типу СИ (>20% от номинальной характеристики) нормируют
граничные динамические характеристики, используемые при
контроле качества СИ, а для отдельных СИ устанавливают
индивидуальную динамическую характеристику. К полным
характеристикам относятся характеристики изменения выходного
сигнала в зависимости от времени и входного сигнала
(передаточная
функция,
импульсная
весовая
функция,
переходная характеристика и т.д.)
Неинформативные параметры выходного сигнала СИ
нормируют путём определения номинальных параметров и
пределов допускаемых отклонений от них либо наибольших или
наименьших допускаемых значений параметров.
Комплекс нормируемых метрологических характеристик
устанавливается для конкретного типа СИ на основании
принятой модели погрешности в реальных условиях применения.
Используется два вида моделей погрешности. Первая модель
имеет вид:
k
Δ1 = Δ0 s * Δ0 st * Δ0 H * ∑ Δci * Δ din ,
(1.2.3)
i=1
где ∆os-систематическая составляющая основной погрешности
СИ; ∆ost –случайная составляющая основной погрешности; ∆оH–
случайная составляющая основной погрешности, обусловленная
гистерезисом; ∑∆сi – объединение
дополнительных
погрешностей, обусловленных действием влияющих величин и
неинформативных параметров входного сигнала СИ; ∆dynдинамическая погрешность СИ; k - число
дополнительных
погрешностей.
Вторая модель записывается в виде:
k
Δ 2 = Δ 0 * ∑ Δci * Δ dyn ,
(1.2.4)
i=1
где ∆o – основная погрешность СИ (без разделения на
составляющие). Символ * означает объединение погрешностей.
Если принята первая модель, то * означает статистическое
суммирование математических ожиданий и дисперсий для
определения точечных и интервальных характеристик, в
частности, интервала, в котором с заданной вероятностью
находится погрешность измерений. Во второй модели * означает
арифметическое суммирование модулей наибольших значений
погрешностей, то есть соответствующих пределов допускаемых
значений погрешностей (это грубая оценка). Какую модель
принять, зависит от свойств СИ данного типа.
Вторую модель применяют для СИ, у которых случайную
составляющую погрешности можно считать несущественной.
Основная погрешность выражается в виде: ∆o=∆os+Ho/2, где Но –
вариация в нормальных условиях. Вторую модель применяют и
при существенной случайной составляющей погрешности, если
составляющие ∑∆ci
и ∆dyn пренебрежимо малы, т.е.
инструментальную погрешность измерений можно принять
равной основной погрешности СИ. Если риск (потери),
связанный с превышением допустимой погрешности велик, то
применяется 1-ая модель. Например, для пирометров излучения
регламентируют
пределы
допускаемых
дополнительных
погрешностей вследствие отклонения от номинальных значений
напряжения питания, температуры и яркости, равные (0,3-0,5)∆р
каждый, и в результате влияния внешнего магнитного поля –
(0,5-1)∆р. При вычислении по 2-ой модели предел допускаемой
погрешности параметров в рабочих условиях составляет:(2,43,5)∆р. Применяя квадратичное суммирование (1-ая модель),
получим предел (1,2-1,6)∆р, а при равномерном распределении
дополнительных погрешностей в указанных пределах, предел
составит (1,7-2,3)∆р.
Правильность
выбора
модели
проверяется
при
государственных испытаниях СИ. После выбора модели
необходимо рационально выбрать комплекс нормируемых
метрологических характеристик, соответствующих данной
модели, назначению и свойствам СИ данного типа. Этот
комплекс должен включать характеристики всех составляющих
1-й и 2-й модели, существенных для СИ данного типа. В ГОСТ
8.009-84 выделены группы СИ: меры (в том числе многозначные)
и цифро-аналоговые преобразователи; аналоговые и цифровые
измерительные и регистрирующие приборы; аналоговые и
аналого-цифровые измерительные преобразователи, в том числе
измерительные коммутаторы сигналов.
Например, для аналоговых измерительных приборов с
существенной случайной погрешностью при выборе 1-ой модели
в перечень нормируемых метрологических характеристик входят:
-цена деления равномерной шкалы или минимальная цена
деления неравномерной шкалы;
-пределы допускаемой систематической составляющей основной
погрешности ∆sp (математическое ожидание М[∆s] и СТО σ[∆s]
систематической
составляющей
основной
погрешности
рекомендуется нормировать, хотя это и необязательно);
-предел допускаемой вариации Нр;
-номинальная функция влияния fs(ϕ) и пределы допускаемых
отклонений от неё;
-номинальные значения характеристики взаимодействия СИ с
устройством, подключённым к его входу и пределы допускаемых
отклонений от них;
-частные динамические характеристики;
-номинальная полная динамическая характеристика и пределы
допускаемых отклонений от неё.
1.3. Погрешность функционирования средств измерений
Общая классификация погрешностей (мы так же будем
использовать термин «ошибка», как эквивалентный понятию
погрешность) подробно рассмотрена в литературе [1–3, 26, 42].
Так, по способу представления погрешности делятся на
абсолютные, относительные и приведенные, по зависимости от
измеряемой
величины
различают
аддитивные,
мультипликативные и нелинейные погрешности (погрешности
нелинейных искажений); по закономерности изменения
погрешности делятся на систематические и случайные; по
условиям появления – на
статические и динамические; в
зависимости от условий эксплуатации средств измерений (СИ) –
на основные и дополнительные; по причинам появления – на
методические
и
инструментальные.
С
точки
зрения
проектирования
и
функционирования
СИ
наиболее
информативным является разделение погрешностей на
методические и инструментальные, так как анализ их
составляющих позволяет оценить погрешность результата
измерения прибором определенного типа. Рассмотрим их для
нескольких типов СИ.
Аналоговые
средства
измерений (АСИ).
Основной
погрешностью АСИ является погрешность преобразования,
обусловленная отклонением реальной функции преобразования
от идеальной (номинальной) и зависящая от погрешности
входной величины и условий измерений. Если погрешность
входного
сигнала
не
учитывается,
то
погрешность
преобразования равна:
Δyпр = fx − f 0 x = Δgx ,
(1.3.1)
где f0 – оператор, соответствующий идеальной (номинальной)
функции преобразования, а f – реальной; Δgx=Δg(x).
Оператор f может быть составным, т.е. включать несколько
разнотипных преобразований: f= f1 f2 f3….Обычно стремятся,
чтобы функция (оператор) преобразования не зависела от
входного сигнала в определенном диапазоне:
(1.3.2)
y = fx = f ( x) = const ( x) = K .
Тогда для погрешности преобразования имеем:
Δyпр = Kx − K0 x = ( K − K0 ) x = ΔKx .
(1.3.3)
В общем случае функцию Δgx можно разложить в степенной
ряд и выделить составляющие погрешности преобразования:
⎛ ∂Δg ⎞
1 ⎛ ∂ 2Δg ⎞⎟ 2
Δg ( x) = Δg (0) + ⎜⎜
x + ... ,
(1.3.4)
⎟⎟ x + ⎜
2 ⎜⎝ ∂x 2 ⎟⎠
⎝ ∂x ⎠0
0
где
Δg(0)
–
аддитивная
погрешность;
⎛ ∂Δg ⎞
⎜⎜
⎟⎟ x –
⎝ ∂x ⎠0
мультипликативная
погрешность,
а
следующие
члены
разложения дают нелинейную погрешность. Для аналоговых СИ
с диапазоном измерения D погрешность преобразования
изменяется в пределах:
(1.3.5)
Δyпр ∈[Δyпр min , Δyпр max ] ,
где Δ у пр min , у пр max – минимальное и максимальное значение
погрешности соответственно:
(1.3.5a)
Δyпр min = min
f ( x) − f 0 ( x) ,
x∈D
Δyпр max = max
f ( x ) − f 0 ( x) .
x∈D
(1.3.5б)
При учете погрешности входного сигнала погрешность
преобразования определяется соотношением:
Δyпр = Δgx + f Δx ,
(1.3.6)
где fΔx≡f(x+Δx)–f(x). Расчет этой погрешности требует знания
структурной схемы СИ и будет рассмотрен в §3.1.
Цифровые
средства
измерений
(ЦСИ).
Основная
погрешность ЦСИ состоит из следующих составляющих:
погрешность
дискретизации,
погрешность
квантования,
погрешность реализации уровней квантования, погрешность,
обусловленная порогом чувствительности, погрешность от
действия помехи (погрешность входного сигнала). Первые две
составляющие
являются
методическими,
остальные
–
инструментальными. Рассмотрим наиболее характерные для ЦСИ
погрешности:
дискретизации и квантования. Погрешность
дискретизации связана с тем, что непрерывный сигнал
измеряется в фиксированные моменты времени. Согласно
теореме Уиттекера (в русской литературе – теорема
Котельникова) эта погрешность минимальна, если измерение
проводить в интервалах времени Δt=1/2fmax , где fmax – верхний
предел частотного спектра входного сигнала. Пусть входной
сигнал является плавной функцией времени, тогда погрешность
дискретизации может быть определена из следующих
соображений. Проведем разложение входного сигнала в ряд
Тейлора вблизи некоторой фиксированной точки t0:
⎛ ∂x ⎞
1 ⎛⎜ ∂ 2 x ⎞⎟
x(t ) = x0 + ⎜⎜ ⎟⎟ Δt +
(Δt )2 + ... .
(1.3.7)
2
2 ⎜⎝ ∂t ⎟⎠0
⎝ ∂t ⎠0
При измерении через конечный интервал времени Δt
значение функции в момент t находится через среднее значение
xср в интервале Δt, т.е. определяется первыми двумя слагаемыми в
разложении (1.3.7). Таким образом, погрешность дискретизации
определяется членами, квадратичными по Δt и более высокого
порядка. Имеем:
1 ⎛⎜ ∂ 2 f ⎞⎟
x(t ) − x0 = xср +
(Δt )2 + ... .
(1.3.8)
2
⎜
⎟
2 ⎝ ∂t ⎠0
С точностью до членов более высокого порядка по
Δt
погрешность дискретизации равна:
1 ⎛ ∂2 f ⎞
Δдискр = ⎜ 2 ⎟ (Δt )2 + ... .
(1.3.9)
2 ⎜⎝ ∂t ⎟⎠
0
Временной интервал измерения находится из условия, чтобы
Δ дискр не превышало погрешности реализации уровней
квантования:
(1.3.10)
Δ дискр ≤ Δ ркв ,
что дает:
2Δ ркв
.
(1.3.11)
(∂ 2 f / ∂t 2 )0
Следует иметь в виду, что выбор интервала дискретизации влияет
на динамическую погрешность СИ и искажение сигнала.
Рассмотрим погрешность квантования. При переходе от
аналогового к цифровому представлению входная величина x
преобразуется в дискретную величину y:
(1.3.12)
y = x + Δ кв ,
где Δкв – погрешность квантования.
Если начало шкалы квантования фиксировано, то величина x
может соотноситься с ближайшим уровнем, с ближайшим
меньшим
или
ближайшим
большим.
Соответственно
(Δt )2 ≤
погрешность квантования является случайной величиной,
равномерно распределенной в интервале [–k/2...k/2], [0...k] или [–
k...0], где k –величина интервала квантования. Отсюда следует,
что математическое ожидание этой погрешности равно 0:
( 1.3.13)
M [Δ кв ] = 0 ,
а дисперсия равна:
D[Δ кв ] =
k2
12
.
(1.3.14)
При случайной установке начала шкалы погрешность
квантования оказывается распределенной по треугольному
закону, так как она равна сумме двух случайных величин,
равномерно распределенных в интервале [–k...0] и [0...k]
соответственно. Поэтому ее математическое ожидание и
дисперсия равны:
( 1.3.15)
M [Δ кв ] = 0 ,
D[Δ кв ] =
2
2⎛k ⎞
k2
=
⎜ ⎟
3⎝ 2⎠
6
,
(1.3.16)
т.е. дисперсия возрастает в два раза по сравнению со случаем
фиксированного начала шкалы. Так как математическое
ожидание этой погрешности равно нулю, то она может быть
исключена усреднением при проведении многократных
измерений.
Интеллектуальные средства измерений (ИнСИ). К ним
относятся
интеллектуальные
датчики
(сенсоры),
интеллектуальные регистраторы, компьютерные измерительные
системы, а также измерительные системы на нейронных сетях и
виртуальные средства измерений. Все эти средства измерений
используют знания, поэтому основная погрешность их
функционирования определяется качеством используемых
знаний – методов и алгоритмов, представленных в базе знаний.
Наиболее характерными являются методические составляющие
погрешности
функционирования,
а
именно,
ошибка
обусловленная неадекватностью моделей Δнад, ошибка,
обусловленная конечностью объема выборки (объема исходных
данных) Δков и ошибка, возникающая из-за не идеальности
выполняемых преобразований Δнид.
Ошибка неадекватности определяется соотношением:
N
N
1
1
Δ над (θ (Δy)) = Nlim
{[ f 0 (Δy j ) ] − [ f 0 (Δ A y j ) ]} ,
→∞
(1.3.17)
где θ(Δy) – характеристика погрешности (дисперсия,
доверительный интервал, максимальное значение и т.д.); Δyj; ΔAyj
– оценка погрешности, найденная по реальной и адекватной
моделям,
соответственно;
f0
–
идеальный
оператор
преобразования; N – объём выборки; черта сверху означает
усреднение по числу измерений j = 1,…, N.
Ошибка из-за конечности объема выборки:
N
N
1
1
Δ ков (θ (Δy)) = [ f 0 (Δy j ) ] − Nlim
{[ f 0 (Δ A y j ) ]},
→∞
(1.3.18)
Ошибка из-за не идеальности преобразования:
N
N
1
1
Δ нид (θ (Δy)) = Nlim
{[ f (Δy j ) ] − [ f 0 (Δy j ) ]} ,
→∞
(1.3.19)
где f и f0 – оператор реального и идеального преобразований
соответственно.
При практических расчетах следует учитывать, что объем
выборки, необходимый для получения несмещенной оценки
результата измерения, зависит от вида закона распределения
экспериментальных данных. Например, в случае нормального
закона распределения и близких к нему распределений
Стьюдента, Пирсона, Фишера значение N=25...30 можно считать
бесконечно большим. Ошибка считается значимой, если ее
значение больше половины погрешности определения:
Δ > 0,5SΔ ,
(1.3.20)
т.е. если относительная ошибка определения погрешности δΔ
>0,5; где SΔ – погрешность определения соответствующей
ошибки.
Рассмотрим пример. Пусть случайная величина y имеет
нормальное
распределение,
которое
аппроксимируется
равномерным
распределением.
Требуется
оценить
доверительный
интервал
результата
измерения.
Для
равномерного распределения дисперсия равна:
( ymax − ymin )2
D[ y] =
,
(1.3.21)
12
для нормального распределения:
N
1
( y j − yN )2 .
D[ yN ] =
(1.3.22)
N ( N −1) ∑
j =1
Доверительный интервал для равномерного распределения при
вероятности P=0,99:
P( ymax − ymin ) 0,99
1.3.23)
Δр =
=
( ymax − ymin ) .
2
2
Доверительный интервал для нормального распределения:
Δ н = tP, N −1( D[ yN ])1/ 2 ,
(1.3.24)
где t – квантиль распределения Стьюдента, зависящий от P и N.
При N→ ∞: t0,99=2,58. Расчеты показывают (см [42], c. 91), что
Δн<Δр при большом объеме выборки N, так как Δр=const(N), а
Δн→ 0 при N→∞; при малых N, наоборот, Δр<Δн.
На практике N нет смысла делать большим, так как это
удорожает эксперимент, и кроме того всегда имеется
систематическая погрешность, ограничивающая объем выборки
(см [40, 42]). Предположим, что N выбрано достаточно большим
N=No, чтобы Δн можно было считать близким к 0, тогда ошибка
неадекватности модели составит:
Δ над = Δ р − Δ н = 0,495( ymax − ymin ) .
(1.3.25)
Отметим, что эта ошибка систематическая и на нее можно
ввести поправку. Значимость расхождения дисперсий и
доверительных интервалов можно определить, используя
распределение Фишера [40, 42, 45].
Оценим ошибку из-за конечности объема выборки. В нашем
случае она составит:
Δ ков = Δ р − Δ н ( N ) = 0,495( ymax − ymin ) − tP, N −1( D[ yN ])1/ 2 ,
1.3.26)
где N – реальный объем выборки: N<No.
При использовании только нормального распределения без
аппроксимации его равномерным:
Δ ков = Δ н ( N ) = tP, N −1( D[ yN ])1/ 2 ,
(1.3.27)
где, например, при P=0,99 и N=5: t=4,60; при N=10: t=3,25; при
N=20: t=2,86.
Оценим ошибку не идеальности преобразований. Пусть
идеальная характеристика СИ описывается полиномом:
(1.3.28)
y = a0 + a1x ,
а реальная представлена функцией:
(1.3.29)
y р = a0′ ,
причем параметры a0, а1, а0′ определены из экспериментальных
данных при достаточно большом объеме выборки N. Тогда
погрешность не идеальности преобразования при определении
доверительного интервала дается выражением:
(1.3.30)
Δ нид = Δ y р − Δ yи = tP, N ⋅ S y р − tP, N ⋅ S yи ,
где Δ y р
= Δ a2 0 + x 2 Δ 2a1
, Δ yи
=
Δ
a0′
Положим P=0,99, а N→∞; тогда tP,N=2,58. Доверительные
интервалы для параметров равны (см [42], стр. 95…97):
(1.3.31)
Δ a0 = 2,58Sa0 ; Δ ′ = 2,58Sa ′ ; Δ a1 = 2,58Sa1 ,
a0
где
0
Sa0 , Sa ′ , Sa1 – стандартные отклонения соответствующих
0
параметров. При измерении в начале диапазона вкладом от Δ a1
можно пренебречь. Тогда:
Δ нид = 2,58(S ′ − Sa0 ) ,
a0
и так как всегда
(1.3.32)
S ′ > Sa0 , то Δ нид >0. При измерении в конце
a0
диапазона Δ нид
значительно возрастает из-за члена х2 Δ a21 .
Следует также учесть, что имеется погрешность преобразования,
которую мы здесь не рассматриваем:
Δyпр = y р − yи = (a0 − a0′ ) + a1( x) .
(1.3.33)
Эта погрешность в нашем примере наиболее значительна на
концах диапазона измерений и мала в середине диапазона.
Системы
на
нейронных
сетях.
Нейронная
сеть
предназначена для решения задач классификации по многим
критериям, и так как измерение является типичной задачей
классификации, в которой роль представителей классов
выполняют эталоны, то построение измерительных систем на
нейронных сетях является оправданным и разумным. Такие
системы особенно эффективны при определении интегральных
свойств (оценка качества, диагностирование), когда измерения
проводятся в порядковой шкале. Отдельный нейрон представляет
собой устройство, состоящее из последовательного соединения
сумматора n→1 (много входов – один выход), преобразователя
сигнала и точки ветвления. Сумматор вычисляет линейную
функцию входов:
n
g ( x) = ∑ ai xi + an+1 .
(1.3.34)
i =1
Преобразователь сигнала (персептрон) представляет собой
пороговое устройство с функцией преобразования f,
активизируемой при поступлении сигнала, превышающего
некоторый уровень. Наиболее часто используют модели
персептрона с линейной, ступенчатой и сигмоидальной
функциями. Функция преобразования считается монотонной
неубывающей и |f|<1. Линейная функция имеет вид: fл(x)=kx при
0≤x<x0, иначе f(x)=0 при x<0 и f(x)=1 при x≥x0. Ступенчатая
функция (функция Хевисайда) имеет вид: fс(x)=1 при х≥x0 + ε ; ε
→ 0, иначе fc(x)=0 при х≤x0 – ε ; ε → 0. Сигмоидальная функция
имеет вид:
fs(x)= 1/(1+exp(–kx)), k>0.Чувствительность
персептрона S определяется производной dy/dx. Она постоянна
для линейной модели, имеет вид δ-функции (дельта-функции)
для ступенчатой модели: S=δ(x–x0); для сигмоидальной функции
чувствительность дается выражением: S = kfs(1–fs), т.е. она равна
0 при fs=0;1 (на границе диапазона) и максимальна в середине
диапазона при fs=1/2: S=0,25k.
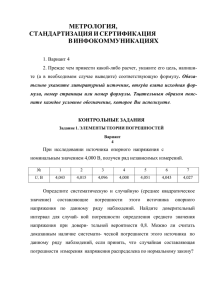
На рис.2
представлена схема нейрона, состоящего из
сумматора Σ, преобразователя f и точки ветвления ω.
Для решения задач классификации (измерения) обычно
используют нейронную сеть, которая представляет собой
последовательное соединение трех слоев, каждый из которых
образован параллельным соединением нескольких нейронов
(число нейронов в каждом слое может варьироваться), причем
выход каждого нейрона предыдущего слоя связан со входами
всех нейронов последующего слоя. При объединении нейронов в
слой возможны два варианта:
а)
функция
преобразования
f(x)=const,
весовые
коэффициенты межнейронных связей выполняют роль
подстраиваемых параметров;
б) при фиксированных весовых коэффициентах ai=const
варьируются функции преобразования f(x), задающие порог.
Σ
x1
f
x2
ω
xn
Рис.2. Схема нейрона.
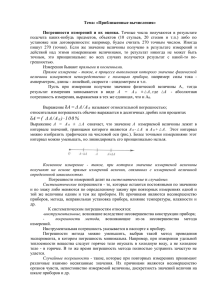
Для получения наилучшего результата может варьироваться
число нейронов в скрытом слое. Hа рис.3 представлена схема
нейронной сети с k входами и q выходами, в которой каждый
выход предыдущего слоя связан с каждым входом
последующего.
x1
xn
x1
xn
x1
xn
1-й слой
2-й слой
3-й слой
Рис.3. Нейронная сеть с k входами и q выходами.
Выходные сигналы нейронной сети, представленной на рис.3,
формально можно записать в виде системы следующих
соотношений:
yr(3)
=
⎛ p
f r(3) ⎜⎜
∑
⎜ l =1
⎝
⎛
⎛ k
cl(3) ⎜⎜ f l(2) ⎜
⎜
⎜
⎝
⎝
∑
j =1
⎛
b(2)
j ⎜⎜
⎝
f j(1)
n
∑
i =1
ai(1) xi
⎞⎞
⎞
⎞
+ an+1 ⎟⎟ + bk +1 ⎟ + c p +1 ⎟⎟ ⎟⎟ ,
⎟
⎟⎟
⎠
⎠
⎠⎠
(1.3.35)
где j=1,…,k – число нейронов в 1-ом слое; l=1,…,p – число
нейронов во 2-ом слое; r=1,…,q – число нейронов в 3-м слое.
Таким образом, на выходе нейронной сети (рис.3) имеем q
выходных сигналов (q классов), полученных трехкратным
взвешенным усреднением исходных данных, причем весовые
коэффициенты, а также число нейронов в скрытом слое могут
варьироваться для получения наилучшего совпадения с
известными результатами при тестировании системы и
самообучении. Структура соединения нейронов в нейронной сети
(топология сети) также может варьироваться и быть как
односвязной, так и многосвязной, что позволяет решать широкий
класс задач оптимального выбора.
Так как измерительные системы на нейронных сетях
относятся к классу интеллектуальных СИ, то для них характерны
рассмотренные выше ошибки: ошибка не идеальности
преобразований; ошибка неадекватности модели и ошибка из-за
конечности объема выборки. Не идеальность преобразований
обусловлена отличием реальной функции преобразования (1.3.35)
от идеальной при отсутствии помех; неадекватность модели
связана с отличием реальной модели персептрона от
сигмоидальной, а также отклонением модели коммутации от
линейной. Поскольку для тестирования нейронной сети требуется
большой объем исходных данных (по сравнению с обычным СИ),
то возрастает удельный вес ошибки из-за конечности объема
выборки. Общее соотношение для погрешности преобразования
нейронной сети с учетом погрешности входного сигнала может
быть получено на основе анализа ее структурной схемы (см.
§3.1).
Вопросы, изложенные в этой главе, рассмотрены в [1–4, 16,
17, 22, 26, 27, 35, 40, 42, 43, 44, 49].
2. Естественные пределы измерений
2.1. Область субъективных измерений
Развитие техники измерений позволило создать такие
измерительные установки, которые, с одной стороны, все
меньше ограничены возможностями человеческих органов
чувств, а с другой - являются оптимальными в эргономическом
отношении. Область применения субъективных измерений в
настоящее время значительно сузилась.
Например, редко
используется слух для измерений в акустике за исключением
нескольких задач: обнаружение сигнала на фоне помех (звуковая
индикация),
оценка
качества
звучания
музыкальных
инструментов, оценка звукового качества помещений. Обоняние
используется при оценке и экспертизе продукции в медицинской,
парфюмерной и пищевой промышленности. Вкус используется в
органолептических измерениях (дегустация и оценка качества
пищевой продукции). Однако зрение все еще играет важную роль
в измерениях, позволяя считывать показания аналоговых
приборов и выполнять целый ряд оптических наблюдений.
Человеческий глаз пока превосходит по чувствительности многие
другие оптические детекторы. Наиболее велика чувствительность
у глаза, адаптированного к темноте (для этого наблюдатель
должен пробыть в темном помещении, по меньшей мере, 30 мин).
Максимальная чувствительность глаза приходится на длину
волны 507 нм. Минимальная порция энергии, которую
воспринимает глаз при этой длине волны, равна 2·10-18 Дж, что
соответствует примерно пяти квантам света, которые должны попасть на одно и то же место сетчатки за одну миллисекунду.
Эквивалентный по чувствительности фотокатод должен обладать
квантовым выходом около 20 %. Столь высокий квантовый
выход имеют только самые лучшие приборы. Относительная
спектральная чувствительность глаза, а значит, и световое
ощущение, возникающее при одном и том же излучении, сильно
различается у разных людей и зависит от силы света. Поэтому
был принят международный стандарт, который определяет
идеализированную кривую спектральной чувствительности для
усредненного
наблюдателя.
Эта
кривая
спектральной
чувствительности
V(λ)
стандартизована
для
зрения,
адаптированного к темноте и к свету. Обе функции V(λ)
нормированы в максимуме на 1. Они приведены на рис. 4:
V(λ)
1,0
0,8
2
1
0,6
0,4
0,2
λ, нм
400
500
600
700
Рис. 4. Спектральная чувствительность V(λ) человеческого глаза, адаптированного
к свету (1) и темноте (2).
Для дневного зрения этот максимум приходится на длину волны
примерно λ = 555 нм. Для глаза, привыкшего к темноте, спектральная кривая чувствительности смещена в сторону более
коротких длин волн, а ее форма немного отличается от кривой
V(λ) для дневного зрения. Наименьший угол зрения, под которым
можно уверенно наблюдать мелкие объекты при хорошем контрасте изображения, зависит от структуры сетчатки глаза и
составляет примерно 2,9·10-4 рад (1 угловая минута).
2.2. Принцип неопределенности Гейзенберга и ограничения
на точность измерений
Принцип
неопределенности, сформулированный В.
Гейзенбергом
в 1927 г., накладывает фундаментальные
ограничения на предельную
точность, с которой можно
определить динамические переменные микроскопической
системы. Утверждается, что отдельная величина может быть
определена в принципе с любой степенью точности, однако две
величины, квантово-механические операторы которых не коммутируют, нельзя одновременно определить сколь угодно точно.
Это ограничение имеет принципиальный характер. Его причины
подробно обсуждаются в учебниках квантовой механики (см.,
например, [37]). При измерениях в микроскопических масштабах
даже самая совершенная и точная аппаратура будет давать
результаты, которые имеют принципиально статистическую
природу. Повторение измерений в одних и тех же условиях будет
давать разные значения измеряемой величины, причем каждое
значение будет появляться с той или иной вероятностью,
зависящей от способа измерения. Сам процесс измерения
возмущает физическую систему таким образом, что
одновременно определить две сопряженные переменные можно
лишь с конечной точностью, которая задается соответствующим
соотношением неопределенностей. Мерой разброса результатов
измерений является среднеквадратичное отклонение σx
получаемого распределения. В таком смысле эту величину
называют
«неопределенностью
Δ».
Таким
образом,
неопределенность координаты равна:
(2.2.1)
Δx = σ x .
Соотношение неопределенностей для координаты и сопряженной
ей переменной − компоненты импульса pх − имеет вид:
(2.2.2)
Δx Δp x ≥ h / 2 .
Так как постоянная Планка h = 2π h чрезвычайно мала, то
выражение (2.2.2) при макроскопических измерениях заведомо
выполняется. Неопределенность
координаты и импульса,
которая следует из (2.2.2), лежит далеко
за пределами
достижимой
точности
экспериментов.
Аналогично
формулируется соотношение неопределенностей для другой
пары сопряженных величин − энергии и времени:
(2.2.3)
ΔE Δt ≥ h / 2 .
Это соотношение связывает неопределенность энергии ΔΕ=σΕ
атомной системы с неопределенностью Δt=σt времени t, в
течение которого измеряется энергия. Если применить
соотношение неопределенностей между энергией и временем к
спонтанному
распаду
в
системах,
находящихся
в
квазистационарных
состояниях,
то
экспоненциальное
распределение измеренных времен распада даст величину
стандартного отклонения, которая равна среднему значению t .
Эту величину называют средним временем жизни τ состояния:
(2.2.4)
τ = t = σ t = Δt
В этом случае неопределенность энергии квазистационарного
состояния равна:
(2.2.5)
ΔE ≥ h / 2τ .
Для квазистационарных состояний с ΔΕ<<Е выражение (2.2.5)
переходит в приближенное равенство. В этом случае можно
ввести еще одну, часто используемую величину − ширину уровня
Г=2ΔΕ. Тогда выражение (2.2.5) приобретает вид:
Γτ = h .
(2.2.6)
В этой форме соотношение неопределенностей играет большую
роль в атомной и ядерной физике. Пусть при распаде испускается
квант с энергией hω , а конечная ширина уровня описывается
спектральным распределением интенсивности электромагнитных
волн p(ω). Тогда если обозначить символом γ «профиль
спектральной линии», то Γ = 2hΔω = hγ , и соотношение (2.2.6)
переходит в соотношение:
γτ = 1.
(2.2.7)
Профиль спектральной линии описывается распределением
Лоренца (Коши):
1
γ /2
ρ (ω ; ω 0 ; γ ) =
π ω − ω 0 )2 + (γ / 2 )2
(2.2.8)
(
Из (2.2.8) видно, что γ − это ширина линии на половине ее
высоты; она называется естественной шириной линии. При
переходах между двумя состояниями с энергетической шириной
Γ1 и Γ 2 спектральная ширина линии равна:
γ = ( Γ1 + Γ2 ) / h
(2.2.9)
Таким образом, уравнение (2.2.7) описывает фундаментальное
свойство волн: оно связывает между собой конечную
продолжительность ограниченного волнового пакета с его
спектральной шириной. Применяя преобразования Фурье,
получим для бездисперсионных волн соотношение:
γτ = K
(2.2.10)
где K – постоянная порядка единицы. Точное значение K зависит
от конкретной формы волнового пакета.
Применим соотношение (2.2.3) к монохроматическим
электромагнитным волнам. Для полного описания волны нужно
измерить как ее амплитуду или интенсивность, так и фазу.
Неопределенность фазы (ϕ = ω t ) связана с неопределенностью
продолжительности измерения:
Δϕ = ωΔt .
(2.2.11)
При измерении амплитуды нужно определить число фотонов N,
пришедших за промежуток времени Δt. Используя соотношение
E = N hω , получим неопределенность энергии в виде:
ΔE = hωΔN .
(2.2.12)
Отсюда следует соотношение неопределенностей для числа
фотонов и фазы электромагнитной волны:
1
ΔN Δϕ ≥ .
(2.2.13)
2
Это соотношение определяет абсолютную границу точности
измерения электромагнитных сигналов, особенно в оптической
области, где в отличие от радиочастотного диапазона при той же
мощности излучения из-за большой энергии квантов число
фотонов, фиксируемых за характерное время измерения Δt , а
значит, и неопределенность ΔN не намного больше единицы.
Поэтому неопределенность фазы велика. Состояние когерентных
электромагнитных волн определено с максимальной точностью,
и для них в соотношении (2.2.13) стоит знак равенства.
2.3. Шумы и причины их появления в измерительных
устройствах
При измерении макроскопических величин максимальная
точность тоже ограничена статистическими флуктуациями возле
среднего значения. Если эти флуктуации нельзя уменьшить при
фиксированных внешних условиях, то их обычно называют
шумами. Причины появления шумов можно разделить на три
группы [12]:
− тепловые колебания при ненулевой температуре;
− корпускулярная природа вещества и электричества;
− соотношение неопределенностей Гейзенберга.
Подробное обсуждение этих вопросов можно найти, например, в
работах [12, 33, 36, 38]. Наглядным примером влияния тепловых
колебаний на точность измерений является брауновское
движение.
Влияние
брауновского
движения
на
показания
гальванометра. Зеркальный гальванометр является высокочувствительным инструментом, позволяющим измерять очень малые
токи, поскольку его выносная шкала может располагаться на
большом расстоянии от подвижной части механизма. Положение
светового пятна на шкале легко фиксируется наблюдателем.
Поскольку механическая часть такого гальванометра находится
на воздухе, то молекулы
газа окружающей атмосферы
бомбардируют в результате своего теплового (брауновского)
движения подвижные части гальванометра и вызывают
случайные колебания зеркала. Однако усредненный по времени
вращающий момент таких воздействий равен нулю. Если
гальванометр находится в термическом равновесии с
окружающим воздухом, то для подвижной системы с одной
степенью свободы выполняется известный из статистической
механики закон равнораспределения энергии по степеням
свободы: Средняя потенциальная энергия равна:
Eпот = 1/ 2 Dϕ 2 ( t ) = 1/ 2kT ,
(2.3.1)
где k − постоянная Больцмана; D − момент инерции
гальванометра; ϕ − угол отклонения от нулевого положения,
ϕ = 0. Средний квадрат флуктуации угла отклонения равен:
(2.3.2)
ϕ 2 ( t ) = kT / D .
Таким образом, электрический ток можно уверенно
зафиксировать только в том случае, если вызванное им
отклонение гальванометра превышает эти термические
флуктуации. Следовательно, минимальная сила тока, которую
можно измерить с помощью данного гальванометра,
определяется как ток Iмин, вызывающий отклонение на угол,
равный корню из среднего
квадрата
флуктуационных
отклонений. Пользуясь соотношением:
Dϕ = GI
(2.3.3)
для гальванометра (G − динамическая константа гальванометра),
получим:
D
kTD
ϕ2 =
(2.3.4)
G
G
Аналогичные рассуждения можно провести и для других
электромеханических систем, например, для мембраны
микрофона или пьезоэлектрического преобразователя.
Тепловой шум. Неупорядоченное тепловое движение
атомных частиц вызывает так называемый тепловой шум во всех
электрических проводниках. Тепловое перемещение носителей
заряда обусловливает статистические колебания плотности
заряда в проводнике. Поэтому между концами проводника
возникает быстро флуктуирующее напряжение UR − напряжение
шума. Эквивалентная электрическая схема реального сопротивления состоит из идеального сопротивления R, в котором
нет шумов, включенного последовательно с
источником
напряжения шума UR (рис. 5):
I мин =
R
≈UR
Рис.5. Эквивалентная электрическая схема проводника:
R − идеальное сопротивление, UR − напряжение шума.
Эффективное напряжение шума определяется так называемой
формулой Найквиста, которая получается из условий
термодинамического
равновесия
с
учетом
закона
о
равнораспределении энергии по степеням свободы. Следуя
Найквисту, рассмотрим проводник большой длины L с нулевым
сопротивлением (рис.6), к которому с двух концов присоединены
волновые сопротивления Z0. В случае идеального проводника Z0
=R. Вся система находится при температуре Т в
термодинамическом равновесии со своим окружением.
≈UR(t)
Z0=R
z
≈UR(t)
Z0=R
Рис. 6. Идеальный проводник, в котором нет электрических
потерь, соединенный с волновыми сопротивлениями Z0.
Разложим напряжение шума на фурье-компоненты. Каждая
волна, вышедшая
из источника U ( z , t ) = U e 0 (ω ) e
,
перемещается вдоль проводника со скоростью υ = ω / β
и
полностью поглощается на другом конце. Таким образом,
каждый из концов проводника служит для приходящих к нему
электромагнитных волн некоторым подобием черного тела. На
основе второго начала термодинамики можно прийти к выводу,
что средние мощности теплового шума PνΔν для волн,
испускаемых источниками в интервале частот Δν, равны и
одинаково зависят от температуры. Тогда общая энергия волн в
проводнике, приходящаяся на интервал Δν, равна:
Eν Δν = 2 Pν Δν L / υ .
(2.3.5)
Если теперь накоротко соединить оба конца проводника, то при
отсутствии потерь энергия электромагнитных волн будет
оставаться постоянной. Это справедливо, в частности, для
собственных колебаний в проводнике в интервале частот Δν.
Геометрические условия для стоячих волн определяют набор
частот ν:
i (ωt − β z )
n
λ
=n
υ
=L ,
2ν
n = 1, 2,3,... .
2
Число стоячих волн в интервале от ν до ν+ Δν равно:
(2.3.6)
2L
Δν .
(2.3.7)
υ
С другой стороны, в условиях термодинамического равновесия
среднее число фотонов N в данном состоянии подчиняется
распределению Бозе–Эйнштейна:
1
N = hν / kT
,
(2.3.8)
e
−1
Δn =
поэтому энергия в проводнике, приходящаяся на интервал частот,
равна:
Δnhν
Eν Δν = NhνΔn = hν / kT
.
(2.3.9)
e
−1
Соотношения (2.3.5) и (2.3.7) позволяют вычислить мощность
тепловых шумов в проводнике с данным сопротивлением:
hν
Δν .
Pν Δν = hν / kT
−1
e
(2.3.10)
Видно, что эта мощность не зависит от величины сопротивления
R. На рис.7 показано нормированное спектральное распределение
плотности мощности шума Pv/kT при разных hv/kT.
Pν/kT
1
10-3
10-2
10-1
hν/kT
1
10
Рис.7. Нормированное спектральное распределение
мощности шума Pv /kT.
Если hv << kT, то мощность шумов не зависит от частоты. В
этом случае принято говорить о белом шуме. Отклонения от оси
абсцисс на рис.7 пренебрежимо малы при частотах
меньше hvмакс<<kT/10; это соответствует при комнатной
температуре
максимальной
частоте
vмакс≈600
ГГц.
Соответствующая длина волны лежит в субмиллиметровом
диапазоне, поэтому практически все электронные приборы
работают ниже vмакс (за исключением усилителей, основанных на
принципе мазера).
Эффективное напряжение шума в сопротивлении
R
определяется усреднением по времени квадрата напряжения
U R2 ,эфф = U R2 ( t ) . Оно вызывает в контуре, показанном на рис.6,
эффективный ток IR,эфф=UR,эфф/2R. Мощность, выделяющаяся в
сопротивлении на другом конце проводника, равна:
I R , эфф = U R , эфф / 4 R = Pν Δν .
2
2
Отсюда следует, что:
(2.3.11)
U 2 R ,эфф = 4kTRΔν
hν / kT
,
(2.3.12)
e hν / kT − 1
2
U R , эфф = 4 kTR Δν , hν kT .
(2.3.13)
Это уравнение обычно называют формулой Найквиста.
Спектральное распределение мощности шумов (спектральная
функция плотности) выглядит как:
2
WU (ν ) = U R ,эфф / Δν = 4 kTR .
(2.3.14)
Рассмотрим пример. Пусть входное сопротивление осциллографа равно R = 2 МОм. При полосе частот Δν = 100 МГц
эффективное напряжение шума на этом сопротивлении составит
для комнатной температуры UR,эфф= 2,6 мВ.
Тепловой шум влияет на передающие характеристики частей
любого измерительного устройства. В качестве примера
рассмотрим шумы на выходе RC-фильтра нижних частот (рис. 8).
≈UR
R
Ue
C
Ua+ΔUa
Рис. 8. Эквивалентная электрическая схема RC-фильтра нижних частот.
Для флуктуации
передачи:
ΔUα
на выходе справедливо уравнение
Uα + ΔUα = H (ω )(U e + U R )
(2.3.15)
c комплексной частотной зависимостью [42]:
Δ U a = H (ω ) U R =
UR
UR
=
,
1 + iω RC 1 + iω / ω g
где ω g = 1/ RC - верхняя граничная частота.
Усреднение квадрата флуктуации по времени дает:
(2.3.16)
ΔU a2 =
1
1+ ω / ω
2
2
g
U R2
(2.3.17)
или с учетом формулы Найквиста (2.3.13):
2kTRΔω
4kTRΔν
ΔU a2 =
=
2
2 .
π 1 + ω 2 / ω g2 ) 1 + ν /ν g
(
(2.3.18)
Интегрируя по всей области частот, получим общую величину
среднего квадрата напряжения для теплового шума в
конденсаторе:
ΔU a2,полн = kT / C .
(2.3.19)
Она не зависит от R. Средняя величина электрической энергии,
накопленной в конденсаторе, равна kT/2 в соответствии с
принципом равнораспределения энергии по степеням свободы.
Дробовой эффект. Другой вид шумов тоже вызван
дискретной природой носителей заряда. Если по сопротивлению
течет постоянный ток, то среднее число носителей заряда,
протекающее по нему в единицу времени, постоянно. В то же
время в каждый момент времени число носителей заряда
статистически изменяется. Это вызывает флуктуации тока. Такое
явление называют дробовым эффектом по аналогии с ударами
дроби, падающей на металлическую пластину. Соответствующий
шум называют дробовым шумом. В наиболее простом виде этот
эффект наблюдается в вакуумном диоде с плоскими электродами
(рис.9).
+
–
¯
I
=UA
A
Рис. 9. Вакуумный диод с плоскими электродами.
Для описания тока предположим, что электроны вылетают с
нагретого катода, имея пренебрежимо малую скорость, и что
электрическое поле между анодом и катодом постоянно. Иными
словами, в вакуумном диоде отсутствуют объемные заряды,
которые искажают электрическое поле и влияют на движение
электрона. В этом случае скорость электронов линейно растет со
временем (рис. 10), а ток, вызванный движением электрона по
внешней цепи, имеет вид:
Ik
t
tk
tk+τ
Рис. 10. Импульс тока от одного электрона.
⎧⎪ τ22e (t −tk ) при tk ≤t ≤tk +τ
I k ( t ) = ef ( t − t k ) = ⎨ 0 при t <t и t >t +τ
k
k
⎪⎩
t k +τ
∫
,
(2.3.20)
t k +τ
I k dt = e
tk
;
∫
f (t − t k ) dt = 1
.
(2.3.21)
tk
Продолжительность импульса тока τ равна времени пролета
электрона от катода к аноду. Форма импульса тока одинакова
для всех электронов, поэтому общий ток в момент времени t
определяется как:
I ( t ) = ∑ I k ( t ) = e∑ f ( t − tk ) .
(2.3.22)
k
k
Электроны вылетают с горячего катода статистически,
независимо друг от друга. Поэтому моменты вылета электронов tk
и, следовательно, моменты возникновения импульсов f(t-tk)
подчиняются распределению Пуассона. Разложим ток I(t) на постоянную I0 и шумовую Is(t) составляющие:
I = I 0 + I S (t ) ,
(2.3.23)
тогда усреднение по времени дает:
I (t ) = I0 ,
Is (t ) = 0
(2.3.24)
Если усреднить по времени квадрат тока, то мы получим.
I 2 ( t ) = I 02 + I S2 ( t ) .
(2.3.25)
Теорема Кемпбелла позволяет выразить среднее значение
статистически независимой последовательности импульсов через
соответствующие средние величины для отдельного импульса.
Если z -средняя скорость следования импульсов (число
импульсов в секунду), то:
I0 = I (t ) = z
tk +τ
∫
tk
Is (t ) = z
2
tk +τ
∫
tk
ef ( t − tk )dt = ze ,
(2.3.26)
e 2 f 2 ( t − tk )dt .
(2.3.27)
С учетом выражения (2.3.20) для диода это дает:
4 ze 2 4 e
2
Is (t ) =
=
I0 .
(2.3.28)
3 τ
3τ
Чем короче длительность импульса, тем выше средний квадрат
флуктуации. На практике это выражение не имеет большого
значения, так как для его проверки нужно проводить измерения с
достаточно большим разрешением по времени или для всего
спектра шумовых токов. Выразим величину тока с помощью его
амплитудного спектра. Для отдельного импульса справедливо
преобразование Фурье:
F (ω ) =
∞
∫ f ( t − t )e
− iω t
dt ,
e
∞
k
−∞
I k ( t ) = ef ( t − tk ) =
∫ F (ω )e
(2.3.29)
dω .
(2.3.30)
2π −∞
Теорема Парсеваля:
∞
∞
∞
2
2
1
2
f
t
−
t
dt
=
F
ω
d
ω
=
F
ν
dν
)
(
)
(
(
)
k
∫
∫
∫
(2.3.31)
2
π
−∞
−∞
−∞
позволяет выразить средний квадрат флуктуации через интеграл
по квадрату амплитудного спектра:
iω t
I s ( t ) = ze
2
∞
2
∫
−∞
∞
2
2
F (ν ) dν = 2eI0 ∫ F (ν ) dν .
(2.3.32)
0
Из этого уравнения можно непосредственно определить
эффективный шумовой ток Is,эфф для интервала частот от ν
до ν +Δν:
I s ( t ) = I s ,эфф = 2eI 0
2
2
2
F (ν ) Δν .
(2.3.33)
Таким образом, частотная зависимость определяется только
формой отдельного импульса тока f(t-tk). При низких частотах
−1
ω τ −1 или ν ( 2πτ ) выражение (2.3.29) переходит в:
F (ν ) =
∞
∫ f ( t − t )e
k
− i 2πν t
tk +τ
dt ≈
−∞
∫ f ( t − t )dt = 1
k
tk
(2.3.34)
и мы получаем известное уравнение Шотки:
2
I s ,эфф = 2eI 0 Δν ,
ν 1 2πτ .
(2.3.35)
Эффективный шумовой ток не зависит при этих частотах от
частоты (так называемый белый шум). Он зависит от величины
тока, ширины частотной полосы и величины заряда, который
переносится каждым носителем. В отличие от теплового шума в
сопротивлениях, который зависит от температуры, на дробовой
шум внешние условия никак не влияют. Спектр мощности имеет
вид:
WI (ν ) = I s ,эфф / Δν = 2eI 0 .
2
(2.3.36)
Рассмотрим пример. Пусть характеристики диода равны:
I0=2 мА; Δν=2 кГц; тогда Is,эфф=2,4 нА.
Если вакуумный диод работает не в области насыщения, то
объемный заряд перед катодом заметно снижает дробовой шум.
Другие виды шумов. Статистические флуктуации могут быть
вызваны целым рядом других эффектов. Рассмотрим некоторые
из них.
Фликкер-эффект. Этот эффект первоначально наблюдался в
электронных лампах с оксидными катодами. Он вызван тем, что в
таких катодах флуктуирует локальная работа выхода электронов.
Эти флуктуации вызывают соответствующие колебания тока.
Существует целый ряд физических механизмов, которые
вызывают изменение локальной работы выхода. Работа выхода
меняется сравнительно медленно, поэтому соответствующий
шум в основном заметен в области низких частот. Мощность
фликкер-шума понижается пропорционально 1/ν. Флуктуации
возрастают почти линейно с увеличением тока, так что
эффективная величина тока
IF,эфф
для фликкер-шума
равна:
I 02
2
I F ,эфф ≈ const Δν .
(2.3.37)
ν
Такая же зависимость часто наблюдается на низких частотах при
переносе заряда в полупроводниках. Во всех подобных ситуациях
принято говорить о 1/f-шуме или фликкер-шуме. (В технической
литературе частота ν обозначается обычно как f ).
Генерационно-рекомбинационный шум. В полупроводниках
возникает специфический вариант дробового шума –
генерационно-рекомбинационный шум. Его часто называют
токовым шумом. Принципиальное отличие полупроводников от
вакуумного диода с этой точки зрения состоит в том, что среднее
время жизни носителей заряда (электронов и дырок) в полупроводниках, как правило, очень мало по сравнению с временем,
необходимым для переноса носителя заряда от одного конца
образца до другого. Поэтому дробовой шум в полупроводниках
определяется скоростями генерации и рекомбинации носителей
заряда. Частотные спектры шума для различных процессов генерации и рекомбинации носителей в полупроводниках
описываются однотипными выражениями:
I 02
I GR , эфф = const
Δν .
(2.3.38)
1 + ν 2 / ν g2
Ниже пороговой частоты мощность шума не зависит от ν (белый
шум), а выше νg она падает как 1/ν2 . Пороговая частота νg
определяется средним временем жизни τ носителей заряда
(νg=1/2πτ). Такая же спектральная зависимость получается, если
пропустить белый шум через RC-цепочку (см. выражение
(2.3.17)).
Квантовый шум. Если дискретная природа носителей заряда
вызывает дробовой шум, то квантование электромагнитного
излучения тоже приводит к флуктуациям потока фотонов. Пусть
имеется идеальный детектор с квантовым выходом η=1
(например, фотоячейка, с катода которой каждый фотон
выбивает один электрон). В таком детекторе распределение
падающих фотонов может в принципе преобразовываться в
соответствующее распределение импульсов тока. Таким образом,
мы можем экспериментально регистрировать флуктуации
электромагнитного излучения. Рассмотрим бесконечно длинную
монохроматическую волну, так называемую когерентную волну.
С классической точки зрения ее амплитуда и фаза не меняются со
временем и не испытывают никаких флуктуаций. При
измерениях в течение одинаковых промежутков времени Δt
можно ожидать при фиксированной мощности излучения P0
одного и того же среднего числа фотонов:
N=
P0 Δt
hν
.
(2.3.39)
Однако наблюдаемое число фотонов флуктуирует в соответствии
с распределением
Пуассона. При этом предполагается, что
фотоны представляют собой классические, не взаимодействующие друг с другом частицы. Стандартное отклонение числа
фотонов равно:
σN = N =
P0 Δt
hν
.
(2.3.40)
Ток так называемых фотоэлектронов в идеальном детекторе
будет подчиняться такому же распределению Пуассона. Поэтому
усредненные флуктуации тока будут описываться уравнением
Шотки для дробового шума. Средний фототок равен:
N eP0
I0 = e
=
.
(2.3.41)
Δt hν
Точно так же можно получить квадрат эффективного шумового
тока по аналогии с (2.3.33) или (2.3.35):
2e 2 P0
2
Δν
I P ,эфф = 2eI 0 Δν =
(2.3.42)
hν
Отношение сигнал–шум S/N принято определять через
отношение соответствующих мощностей:
S
I 02
=
.
(2.3.43)
N I2
P ,эфф
В случае фототока (2.3.43) переходит в:
S
=
P0
.
(2.3.44)
N 2hνΔν
Если считать, что в нашем идеальном детекторе не возникают
собственные шумы, то независимо от постоянной мощности
падающего излучения P0 эквивалентная мощность шума PR,эфф на
детекторе составляет:
(2.3.45)
PR,эфф = 2hνΔν .
Это выражение описывает случай непосредственного приема
сигнала. В случае гетеродинного приема шумы уменьшаются
вдвое, а при гомодинном приеме – даже вчетверо [36]. В отличие
от теплового шума, уровень которого понижается при высоких
частотах, квантовый шум линейно возрастает с частотой. В
области hv/kT>>1 он начинает преобладать над тепловым шумом.
При комнатной температуре это соответствует оптической и
инфракрасной областям спектра. Для описания шумов вводят так
называемую шумовую температуру TR.. При этой температуре
мощность теплового шума в проводнике равна мощности
квантового шума. Приравнивая выражения (2.3.10) и (2.3.45),
получим в явном виде формулу для TR :
hν
TR =
.
(2.3.46)
k ln ( 3 2 )
Рассмотрим пример. В оптической области квантовый шум
при λ=500 нм соответствует шумовой температуре TR=70 000 К.
Минимальная мощность излучения, которую еще можно
зарегистрировать, должна соответствовать S/N=1. Иными
словами, для непосредственного приёма с помощью идеального
детектора справедливо соотношение:
P0,мин = РR ,эфф = 2 hνΔν .
(2.3.47)
Эта мощность всего вдвое превышает предел, который
получается из соотношения неопределенностей [12]. Уравнение
(2.3.47) означает, что за время Δt≈1/2Δν должен быть зарегистрирован в среднем один фотон. В радио- и микроволновом
диапазонах когерентное излучение получают с помощью
специальных передатчиков. В области микроволн к ним
примыкают мазеры. В оптическом и инфракрасном диапазонах
источниками когерентного излучения служат лазеры. Обычные
источники света испускают так называемое тепловое излучение.
Это излучение не когерентно, и фотоны в каждой моде
подчиняются распределению Бозе–Эйнштейна [42]. В этом
случае флуктуации существенно выше, чем у когерентных
источников:
σ N2 = N 2 + N ,
(2.3.48)
и эти флуктуации вызывают более значительные шумы в
детекторе [36]. Если фотоны, зафиксированные детектором, разделяются на z независимых мод, то сильные флуктуации
распределения
Бозе–Эйнштейна
выравниваются
и
среднеквадратичное отклонение нового распределения имеет
вид:
N z2
2
σ =
+ Nz
(2.3.49)
z
В предельном случае очень большого числа мод мы снова
получим распределение Пуассона [12, 36].
2.4. Фазочувствительные детекторы и усилители
Если изучаемая физическая величина так мала, что
вызванный ею сигнал, пройдя датчик, преобразователь и
усилитель, полностью перекрывается шумами, возникающими в
измерительной системе, то прямые измерения становятся
невозможными. Простым и удобным средством, которое
позволяет понизить шумы измерительного устройства, является
RC-цепочка. Она ограничивает полосу частот и понижает шумы
настолько,
насколько
позволяет
конкретная
задача.
Эффективным является метод, который впервые был предложен
Дикке при изучении чрезвычайно слабого излучения в
микроволновой области. При этом измеряемая физическая
величина модулируется, полученный сигнал смешивается с
опорным сигналом такой же частоты, а затем анализируется
фазочувствительной схемой сравнения. Такие приборы
называются фазочувствительными детекторами или усилителями.
В настоящее время подобные методы широко применяют во
многих областях измерений. В качестве примеров можно
привести ядерный магнитный резонанс (ЯМР) и электронный
парамагнитный резонанс (ЭПР), флуоресцентную, лазерную,
модуляционную
и
рентгеновскую
спектроскопию,
радиоастрономию. Рассмотрим физическую величину x, которую,
необходимо измерить. Она дает на выходе измерительной
установки сигнал с напряжением U0. При прямых измерениях
отношение сигнал–шум имеет вид:
U 02
U 02
⎡S⎤
=
.
(2.4.1)
⎢⎣ N ⎥⎦ = U 2
4kTRэкв Δν
0
R ,эфф
В этом выражении суммарная величина шума описывается
эквивалентным сопротивлением Rэкв. Если модулировать входной
сигнал (например, прерывая электромагнитное излучение с
помощью вращающегося диска со щелями), можно получить
периодический сигнал на выходе. В идеальном случае синусоидальной модуляции с единственной частотой:
U x = (U 0 2 ) sin ω t .
(2.4.2)
Более сложный периодический сигнал можно разложить на
фурье-компоненты. Дальнейшие рассуждения применимы к
каждой из этих компонент. Основной частью простейшего
фазочувствительного
детектора
является
линейный
двухсеточный смеситель с последующим фильтром нижних
частот (рис.11).
Смеситель
Ux+UR
ФНЧ (RC-цепочка)
Ua=Uax+UaR
U ax + U aR
Uv
Рис. 11. Принципиальная схема фазочувствительного детектора.
В смесителе сигнал и шум складываются с синусоидальным
опорным напряжением Uυ = U 0υ sin (ωυ t + ϕυ ) . В этом случае
выходное напряжение имеет вид:
U a = [U 0 2sin ω t + U R (t ) ]U 0υ sin (ωυ t + ϕυ ) .
(2.4.3)
Если частота ωυ опорного напряжения синхронизирована с
частотой сигнала (ωυ = ω ) , то выходное напряжение, которое
соответствует входному сигналу Ux, имеет вид:
U ax = (U 0 2 )U 0υ sin ω t sin (ω t + ϕυ ) =
.
(2.4.4)
= (U 0U 0υ 4 ) ⎡⎣cos ϕυ − cos ( 2ω t + ϕυ ) ⎤⎦
Этот сигнал проходит через фильтр (RC-цепочка c
ω g = 1 RC 2ω ). На выходе фильтра получается арифметическое
среднее:
U ax = (U 0U 0υ / 4 ) cos ϕυ .
(2.4.5)
Такой выходной сигнал прямо пропорционален входному
сигналу и зависит от сдвига фаз ϕυ между входным и опорным
сигналами. Наилучшие результаты получаются при ϕυ =0°.
После смесителя вклад шума равен:
U aR = U R ( t )U 0υ sin (ωυ t + ϕυ ) .
(2.4.6)
На рис.12 показан выходной сигнал для одной из тринадцати
гармоник шума с частотой ωR=(5/6)ωυ. Хорошо видно, что при
сложении с опорным сигналом возникают положительные и
отрицательные отклонения, которые компенсируются при
усреднении.
Uv
ωv
UR⊗Uv
t
UR
⊗
ωR=5/6ωv
t
Рис. 12. Наложение двух периодических сигналов
с близкими частотами.
t
Если проводить усреднение достаточно долго, то
результирующий вклад шума будет очень мал. Для одной
гармонической составляющей шума можно преобразовать
выражение (2.4.6) с помощью тригонометрических формул
(предполагая, что φυ=0):
U aR (ω R ) = U 0 RU 0υ sin ω R t sin ωυ t ,
(2.4.7)
U aR (ω R ) = (U 0 RU 0υ 2 ) ⎡⎣cos (ω R − ωυ ) t − cos (ω R + ωυ ) t ⎤⎦ .
(2.4.8)
Фильтр с верхней граничной частотой ω g ωυ дает на выходе
соответствующее усредненное значение
U aR (ω R ) = H (ω ) U aR (ω R ) .
(2.4.9)
Используя выражение для RС-цепочки, получим:
2
U aR
(ω R ) =
U 02RU 02υ
2 ⎡1 + (ω R − ωυ ) / ω g2 ⎤
⎣
⎦
2
cos 2 (ω R − ωυ ) t .
Таким образом, из широкого спектра шумов WU (ω R )
узкая область возле частоты
остается
ωυ , которая и определяет
остаточный шум. Эффективную ширину
определить из (2.4.10):
Δω эфф = 2ω g = 2 / RC ,
Δν эфф = 1/ π RC .
(2.4.10)
Δω эфф тоже можно
(2.4.11)
(2.4.12)
Ее можно сделать
как угодно малой, если увеличивать
постоянную времени RC. При этом, конечно, она не должна быть
больше характерного времени изменения измеряемой величины.
Такое интегрирование не влияет на сам сигнал, даваемый
выражением (2.4.5). Роль модулирующей частоты ωυ состоит в
том, что измерения смещаются из частотной области сильных
шумов (например, 1/f-шума при низких частотах) в область, где
уровень шума мал.
Вопросы, изложенные в этой главе, рассмотрены в [12, 23,
25, 33, 36, 37, 38].
3. Методы оценки точности средств измерений
3.1 Метрологический анализ
Под метрологическим анализом понимается анализ
точности измерений или, в более узкой постановке, точности
функционирования СИ. Для его проведения необходимо
построить модель СИ, в частности, его структурной схемы.
Многообразие структурных схем СИ может быть сведено к
конечному набору типовых моделей, характеризуемых двумя
факторами: типом схемы и числом входов-выходов. Выделим
следующие типовые модели:
1) линейная с одним входом и одним выходом:
а) последовательное соединение элементов (рис.13а);
б) параллельное соединение элементов (рис.13б);
2) линейная с одним входом и многими выходами (рис.13в);
3) линейная с многими входами и одним выходом (рис.13г);
4) циклическая с одним входом и одним выходом (рис13д);
x
f1
f2
fk
y
Рис.13а. Линейная схема с последовательным соединением
элементов: х – входной сигнал,
y – выходной сигнал; f1,…,fk – функции преобразования отдельных элементов (СИ).
f1
х
f2
y
fk
Рис.13б. Линейная схема с параллельным соединением элементов.
Ошибка!
f (1)
y1
f (2)
x
f
y2
(k)
yk
Рис. 13в. Линейная схема с одним входом и многими выходами.
f (1)
xl
x2
f (2)
y
xk
f
(k)
Рис.13г. Линейная схема с многими входами и одним выходом.
x
f1
y
f2
Рис.13д. Циклическая схема с одним входом и одним выходом.
Для схемы на рис. 13,а
при произвольных функциях
преобразования погрешность в квадратичном приближении
определяется системой рекуррентных соотношений
∂yi
∂yi
1 ∂ 2 yi
1 ∂ 2 yi
2
Δyi =
Δf i +
Δyi −1 +
(Δf i ) +
(Δyi −1 ) 2 +
2
2
∂f i
∂yi −1
2 ∂f i
2 ∂yi −1
∂ 2 yi
(Δf i Δyi −1 ), i = 1,..., k .
+
∂f i ∂yi −1
(3.1.1)
Вводя чувствительности Si=∂yi/∂yi-1, выражение (3.1.1) можно
записать в виде
∂yi
1 ∂ 2 yi
1 ∂Si
Δyi =
Δf i + Si Δyi −1 +
(Δfi ) 2 +
(Δyi −1 ) 2 +
2
∂f i
2 ∂fi
2 ∂yi −1
+
∂Si
( Δf i Δyi −1 ) ,
∂f i
(3.1.1а)
где yi=fi(yi-1); y=fk(fk-1… f1(x)); y0=x.
В частности, при i=1 (схема из одного элемента) имеем
∂y1
∂y1
1 ∂ 2 y1
1 ∂ 2 y1
2
Δy1 =
Δf1 +
Δx +
(Δf1 ) +
(Δx) 2 +
2
2
∂f1
∂x
2 ∂f1
2 ∂x
∂ 2 y1
+
(Δf1Δx) ,
∂f1∂x
где y1=y=f1(x);
Вводя чувствительность S1=∂y1/∂x, получим из (3.1.1б)
(3.1.1б)
∂y1
1 ∂ 2 y1
1 ∂S1
(Δf1 ) 2 +
(Δx) 2 +
Δy1 ≡ Δy =
Δf1 + S1Δx +
2
∂f1
2 ∂f1
2 ∂x
∂S1
(Δf1Δx) .
(3.1.1в)
∂f1
В выражениях (3.1.1, 3.1.1в) два первых слагаемых
соответствуют линейному приближению. Для проведения
расчетов нужно знать вид функций преобразования. Рассмотрим
случай, наиболее важный для практики и, одновременно,
+
наглядный, когда функции преобразования элементов fi являются
постоянными. При учете только погрешности входного сигнала
имеем
1
Δy = ∏ Si Δх = S Δx ,
(3.1.2)
i =k
где ∆y – погрешность сигнала на выходе; ∆х – погрешность
сигнала на входе, S – чувствительность схемы.
Относительная
ошибка
определения
погрешности
выходного сигнала из (3.1.2) определяется выражением
δ Δy ≡
k
Δ (Δy )
= ∑ δ S i + δ Δx ,
Δy
i =1
(3.1.3)
где δS i – относительная ошибка определения чувствительности
i-го элемента схемы, δ Δx – относительная ошибка входного
сигнала. Отметим, что погрешность считается значимой, если
δ Δy < 0.5 .
Выражение (3.1.2) не учитывает отклонение реальной
функции преобразования от идеальной (номинальной). При учете
этого фактора погрешность выходной величины находится из
соотношения:
k
∂y
∂y
Δy = ∑
Δf i + Δx ,
(3.1.4)
∂
f
∂
x
i =1
i
где Δf i – отклонение реальной функции от идеальной для i-го
элемента схемы.
Второе слагаемое в (3.1.4) определяется погрешностью
входного сигнала и совпадает с (3.1.2). Первое слагаемое
учитывает вклад элементов схемы из-за отличия реальной
функции преобразования от идеальной и записывается в виде
1
k
∂y
Δ
f
=
Δ
f
∑
∑
i
i∏ f jх ,
i =1 ∂f i
i =1
j =k
k
(3.1.4а)
j ≠i
Если учитывать не только линейные, но и квадратичные
члены по ∆х, то выражение для погрешности входной величины
принимает вид
1
1
k
k
1 k
(2)
(1)
Δy = Δy + ∑ Δf i ∏ f j х + ∑ Δf i ∑ Δf j ∏ f l х +
2 i =1
i =1
j =1
j =k
l =k
j ≠i
j ≠i
l ≠i , j
k
1
i =1
j =k
j ≠i
+ ∑ Δfi Δx∏ f j ,
(3.1.5)
где Δfi – абсолютная погрешность функции преобразования, ∆y(1)
определяется соотношением (3.1.2) и учтено, что в данном
случае Si= fi.
Определим
математическое ожидание и дисперсию
погрешности. В линейном приближении при учете только
погрешности входного сигнала для математического ожидания и
дисперсии имеем соответственно из (3.1.2)
k
M [Δy ] = ∏ S i M [Δx ] ,
(3.1.6)
D[Δy ] = ∏ S i2 D[Δx ] ,
(3.1.7)
i =1
k
i =1
В более общем случае из соотношения (3.1.4) найдем
k
1
1
i =1
j =k
j ≠i
i =k
M [ Δy ] = ∑ M [ Δfi ] ∏ f j x + ∏ Si M [ Δx ] ,
(3.1.6а)
2
⎛ 1
⎞
2
⎛ 1
⎞
⎜
D [ Δy ] = ∑ D [ Δf i ] ∏ f j x ⎟ + ⎜ ∏ Si ⎟ D [ Δx ] ,
⎜ j =k
⎟ ⎝ i =k ⎠
i =1
⎜ j ≠i
⎟
⎝
⎠
k
(3.1.7а)
В квадратичном приближении из (3.1.5) найдем
k
1
1
i =1
j =k
j ≠i
i =k
M [ Δy ] = ∑ M [ Δfi ] ∏ f j x + ∏ Si M [ Δx ] +
1
k
∑ M [Δf Δx]∏ f ,
i =1
i
1
1 k k
M [Δfi Δf j ]∏ fl х +
∑∑
2 i =1 j =1
l =k
j ≠i
l ≠i , j
(3.1.6б)
j
j =k
j ≠i
2
2
⎛ 1
⎞
⎛ 1
⎞
2
1 k k
⎛ 1
⎞
⎜
⎟
⎜
D [ Δy ] = ∑ D [ Δfi ] ∏ f j x + ⎜ ∏ Si ⎟ D [ Δx ] + ∑∑ D[Δfi Δf j ] ∏ f l х ⎟ +
⎜ j =k
⎟ ⎝ i =k ⎠
⎜ l =k
⎟
4 i =1 j =1
i =1
⎜ j ≠i
⎟
⎜ l ≠i , j
⎟
j ≠i
⎝
⎠
⎝
⎠
k
⎛ 1
⎞
⎜
D[Δfi Δx] ∏ f j ⎟
∑
⎜ j =k ⎟
i =1
⎜ j ≠i ⎟
⎝
⎠
k
2
(3.1.7б)
Если погрешности Δf i , ∆х – случайные центрированные, то
M [Δf i ] = 0 и M [Δx ] = 0 , т.е. и M [Δy ] = 0 . Если Δf i и ∆х –
систематические, то их математические ожидания отличны от
нуля, и, следовательно, M [Δy ] ≠ 0 . Аналогично рассчитываются
математическое ожидание и дисперсия погрешности в более
сложных случаях, однако результаты получаются менее
наглядными. Для многих СИ наряду с абсолютной погрешностью
Δy
целесообразно задавать относительную погрешность δ y = . Для
y
рассматриваемой схемы связь между входом и выходом
представима в виде (см.§ 1.3)
(3.1.8)
y = f k f k −1 ⋅ .....⋅ f 1 x .
Отсюда, используя соотношение (3.1.4), после преобразований
получим в линейном приближении
k
δ y = ∑ δ fi + δ x ,
(3.1.9)
i =1
где δf i - относительная погрешность функции преобразования iго элемента схемы; δх - относительная погрешность входного
сигнала.
В квадратичном приближении после ряда преобразований
имеем
k
k
1 k
(2)
(1)
δ y = δ y + ∑ δ f i ∑ δ f j + ∑ δ f iδ х ,
(3.1.10)
2 i =1
j =1
i =1
j ≠i
где δ y (1) определяется выражением (3.1.9).
Если функции преобразования являются номинальными, то
δf i = 0 и относительная погрешность выходного сигнала
определяется погрешностью входного сигнала.
Определим математическое ожидание и дисперсию
δf i
относительной
погрешности.
Считая
погрешности
некоррелированными, из (3.1.10) получим
M [δ y ] = M [δ x ] + ∑ M [δ fi ] +
k
i =1
1 k k
∑∑ M ⎡δ fiδ f j ⎤⎦ +
2 i =1 j =1 ⎣
j ≠i
k
∑ M [δ f δ x ] ,
i =1
(3.1.11)
i
D [δ y ] = D [δ x ] +
k
∑ D [δ fi ] +
i =1
1
1 k k
⎡
⎤
D
δ
f
δ
f
D [δ f iδ x ]
+
∑∑
∑
i
j⎦
4 i =1 j =1 ⎣
i =k
(3.1.12)
j ≠i
При практических расчетах можно принять, что
погрешности δf i и δx независимы, поэтому M [δf i δx] = M [δf i ]M [δx] ;
D [δ fiδ x ] = D [δ f i ] M ⎡⎣(δ x) 2 ⎤⎦ + D [δ x ] M 2 [δ f i ] . Аналогичное утверждение
справедливо также для δf i и δ f j .
Если положить δf i = const (i) , т.е. погрешности для всех
элементов схемы одинаковы, и погрешность δx пренебрежимо
мала, то из (3.1.11) получаем
1
2
(3.1.11а)
M [δy ] = kM [δf i ] + k (k − 1)M [(δf i ) ]
2
Соотношение
(3.1.12) для дисперсии при тех же
предположениях принимает вид
1
2
D[δy ] = kD[δf i ] + k (k − 1)D[(δf i ) ]
(3.1.12а)
4
Таким образом, математическое ожидание и дисперсия
относительной погрешности выходного сигнала возрастает в k
раз по сравнению с соответствующими величинами для
отдельного элемента схемы (без учета квадратичных слагаемых).
Для схемы на рис.13,б в квадратичном приближении получается
следующее общее соотношение
k
k
⎤
∂ 2 yi
∂ 2 yi
1 ⎡ k ∂ 2 yi
(2)
(1)
2
( ΔxΔfi ) + ∑ 2 (Δfi ) 2 ⎥ ,
Δy = Δy + ⎢ ∑ 2 (Δx) + 2∑
2 ⎣ i =1 ∂x
i =1 ∂x∂f i
i =1 ∂f i
⎦
(1)
где Δy – выражение для погрешности в линейном приближении;
yi=fi(x); y=y1+…+ yk. Для Δy(1) имеем
k
k
∂y
(1)
Δy = ∑ Si Δx + ∑ i Δfi ,
i =1
i =1 ∂f i
Рассмотрим случай, когда функции преобразования
являются постоянными. В тех же обозначениях при учете только
погрешности входного сигнала имеем
k
Δy = ∑ S i Δx ,
(3.1.13)
причем Si= fi.
Для относительной ошибки погрешности найдем
δ Δy = δ S + δ Δx ,
(3.1.14)
i =1
k
где S = ∑ S i - чувствительность схемы.
i =1
Если учесть отклонение реальной функции преобразования
от идеальной, то выражение для абсолютной погрешности
принимает вид
k
k
i =1
i =1
Δy (1) = ∑ Δf i x + ∑ Si Δx ,
(3.1.13а)
В квадратичном приближении для погрешности получим
k
Δy (2) = Δy (1) + ∑ Δfi Δx ,
(3.1.13б)
i =1
Определим математическое ожидание
абсолютной погрешности из (3.1.13б)
k
k
k
i =1
i =1
i =1
M [ Δy ] = ∑ M [ Δfi ] x + ∑ Si M [ Δx ] + ∑ M [ Δfi Δx ] ,
и
дисперсию
(3.1.15)
2
k
⎛ k ⎞
D [ Δy ] = ∑ D [ Δf i ] x + ⎜ ∑ Si ⎟ D [ Δx ] + ∑ D [ Δfi Δx ] .
i =1
i =1
⎝ i =1 ⎠
k
2
(3.1.16)
Определим относительную погрешность. Для параллельной
схемы связь между входом и выходом представима в виде
(см.§1.3.)
k
y = ∑ fi x ,
(3.1.17)
i =1
С учетом (3.1.13а) после ряда преобразований получим
k
k
i =1
i =1
δ y (1) = ∑ fiδ fi / ∑ fi + δ x ,
(3.1.18)
В квадратичном приближении вместо (3.1.18) имеем
k
k
i =1
i =1
δ y (2) = δ y (1) + ∑ fiδ fiδ x / ∑ fi ,
(3.1.18а)
где δy (1) - определяется выражением (3.1.18).
Для математического ожидания и дисперсии относительной
погрешности имеем соответственно
k
k
M [δ y ] = ∑ f i M [δ f i ] / ∑ fi + M [δ x] +
i =1
i =1
k
k
i =1
i =1
+ ∑ f i M [δ f iδ x ] / ∑ f i ,
k
D [δ y ] = ∑
i =1
k
+∑
i =1
(3.1.19)
2
⎛ k ⎞
fi D [δ f i ] / ⎜ ∑ f i ⎟ + D [δ x ] +
⎝ i =1 ⎠
2
⎛ k ⎞
f i D [δ f iδ x ] / ⎜ ∑ fi ⎟
⎝ i =1 ⎠
2
(3.1.20)
2
Если принять, что δ f i = const ( i ) , то (3.1.19), (3.1.20)
упрощаются
M [δ y ] = M [δ f i ] + M [δ x ] + M [δ fiδ x ] ,
(3.1.19а)
k
D [δ y ] = D [δ f i ] ∑
i =1
2
⎛ k ⎞
f i / ⎜ ∑ fi ⎟ + D [δ x ] +
⎝ i =1 ⎠
2
k
+ D [δ fiδ x ] ∑
i =1
⎛ k ⎞
fi / ⎜ ∑ fi ⎟
⎝ i =1 ⎠
2
(3.1.20а)
2
Если положить f i = const ( i ) и δx=0, то имеем:
M [δ y ] = M [δ f i ] ,
(3.1.19б)
D[δ y ] = 1/ kD[δ fi ] .
(3.1.20б)
Из полученных соотношений следует, что математическое
ожидание погрешности не изменяется, а составляющая
дисперсии, зависящая от погрешности преобразования
уменьшается в k раз по сравнению с дисперсией относительной
погрешности для отдельного элемента схемы.
Схема на рис.13,в сводится к нескольким схемам,
представленным на рис.13,а, так что получаем систему
уравнений для определения погрешности выходной величины.
При этом функции f(1),…,f(k) могут содержать несколько
составляющих, что не принципиально. Для погрешностей
выходных величин каждой ветви справедливы соотношения
(3.1.1) – (3.1.7). Например, выражение (3.1.2) запишется в виде:
kj
Δy ( j ) = ∏ S i( j ) Δx ,
(3.1.21)
i =1
где j -номер ветви, j = 1, l ; k j - число элементов в j − ой ветви
схемы.
Схема на рис.13,г сводится к схеме на рис.13,б с учетом того,
что сигналы на входе каждой ветви различны. При этом, как и в
предыдущем случае, каждая ветвь может состоять
из
последовательных или параллельных элементов. Считая, что
операторы f в каждой ветви простые (не составные), получим
из (3.1.13а)
l
l
j =1
j =1
Δy (1) = ∑ S ( j ) Δx ( j ) + ∑ x ( j ) Δf ( j ) ,
число ветвей.
В квадратичном
аналогичное (3.1.13б)
где
(3.1.22)
l−
l
Δy (2) = Δy (1) + ∑ Δf ( ) Δx (
j
j)
,
приближении
имеем
соотношение,
(3.1.22а)
j =1
где Δy (1) - определяется из соотношения (3.1.22)
Аналогично могут быть записаны и другие соотношения
для данной схемы.
Для схемы на рис.13,д в линейном приближении можно записать
⎛ ∂f
⎞
∂y
∂z
∂z
Δy (1) = ⎜ 1 Δx + 1 Δf1 +
Δf1 signf 2 +
Δf 2 signf 2 ⎟ / Q ,
∂f1
∂f1
∂f 2
⎝ ∂x
⎠
где Q=(1–∂z/∂y⋅signf2); y1=f1(x); z=f1(f2(y)); y–f1(f2(y))⋅signf2=f1(x);
∂z/∂y=(∂f1/∂f2)(∂f2/∂y). В квадратичном приближении получаем для
погрешности при произвольных функциях преобразования
1 ∂ 2 f1
1 ∂ 2 y1 ∂ 2 z
(2)
(1)
2
Δy = Δy + {
(Δx) + ( 2 + 2 signf 2 )(Δf1 ) 2 +
2
2 ∂x
2 ∂f1
∂f1
∂ 2 y1
1 ∂2 z
1 ∂2 z
2
+
signf 2 (Δf 2 ) +
(Δf1Δx)}/ Q +
signf 2 ⋅
2 ∂f 22
∂f1∂x
2 ∂y 2
∂f
∂y ∂z
∂z
{( 1 ) 2 (Δx) 2 + ( 1 +
signf 2 ) 2 (Δf1 ) 2 + ( ) 2 (Δf 2 ) 2 +
∂x
∂f1 ∂f1
∂f 2
2
∂f1 ∂y1 ∂z
∂f ∂z
(
signf 2 )(ΔxΔf1 ) + 2 1
signf 2 (ΔxΔf 2 ) +
+
∂x ∂f1 ∂f1
∂x ∂f 2
∂y1 ∂z
∂y ∂z
∂f
signf 2 (Δf1Δf 2 )}/ Q3 + {( 1 +
signf 2 )(Δf1 ) 2 + 1 (Δf1Δx) +
∂f1 ∂f 2
∂f1 ∂f1
∂x
1 ∂2 z
1 ∂2 z
∂z
2
signf 2 / Q +
signf 2 ⋅
signf 2 (Δf1Δf 2 )} ⋅
2 ∂y∂f1
2 ∂y∂f 2
∂f 2
∂f
∂y ∂z
∂z
{ 1 (ΔxΔf 2 ) + ( 1 +
signf 2 )(Δf1Δf 2 ) +
signf 2 (Δf 2 ) 2 }/ Q 2
∂x
∂f1 ∂f1
∂f 2
В случае постоянных функций преобразования выражения
упрощаются, и можно записать в линейном приближении
Δf1 x + f12 xΔf 2 signf 2
S1Δx
,
(1 − f1 f 2 signf 2 )
(3.1.23)
(1 − f1 f 2 signf 2 )
где signf 2 = 1 для положительной обратной связи и signf 2 = −1 для
отрицательной обратной связи.
Соотношение для ошибки погрешности δ Δy мало
информативно, поэтому не приводится.
В квадратичном приближении имеем
Δy (1) =
Δy
(2)
2
+
(1)
(1)
Δf1Δx
1 f 2 Δf1Δy signf 2
1 f Δf Δy signf 2
= Δy +
+
+ 1 2
1 − f1 f 2 signf 2 2 1 − f1 f 2 signf 2
2 1 − f1 f 2 signf 2
(1)
Определим математическое ожидание
погрешности Δy из соотношения (3.1.24.)
и
(3.1.24)
дисперсию
M [ Δy ] = xM [ Δf1 ] / Q 2 + f12 x signf 2 M [Δf 2 ] / Q 2 + S1M [ Δx ] / Q +
1
1
f1 f 2 signf 2 ) / Q 2 + M [ Δf 2 Δx ] f12 signf 2 / Q 2 +
2
2
1
1
2
+ M [ Δf1Δf 2 ] f1 xsignf 2 (1 + f1 f 2 signf 2 ) / Q 3 + M ⎡( Δf1 ) ⎤ f 2 x signf 2 / Q 3 +
⎦
2
2 ⎣
1
+ M [(Δf 2 ) 2 ] f13 x / Q 3 ,
2
4
2
D [ Δy ] = x 2 D [ Δf1 ] / Q 4 + f1 x 2 D[Δf 2 ] / Q 4 + S1 D [ Δx ] / Q 2 +
+ M [ Δf1Δx ] ⋅ (1 −
1 2 2 ⎡
1
1
2
2
f 2 x D ( Δf1 ) ⎤ / Q 6 + f16 x 2 D ⎡( Δf 2 ) ⎤ / Q 6 + f14 D [ Δf 2 Δx ] / Q 4
⎣
⎦
⎣
⎦
4
4
4
1
1
+ f12 x 2 D [ Δf1Δf 2 ] (1 + f1 f 2 signf 2 ) 2 / Q 6 + D [ Δf1Δx ] (1 − f1 f 2 signf 2 ) 2 / Q 4 .
4
2
(3.1.25)
+
(3.1.26)
В соотношениях (3.1.25, 3.1.26) введено обозначение Q=12
f1f2signf2 и учтено, что ( signf 2 ) = 1 .
Определим
относительную
погрешность.
Для
рассматриваемой схемы связь между входом и выходом
представима в виде (см.§1.3.):
y=
f1 x
1 − f1 f 2 signf 2
.
(3.1.27)
Из соотношений (3.1.24) и (3.1.27) после преобразований
получим:
1
δ y = δ y (1) + δ xδ f1 + δ y (1) f1 f 2 signf 2 (δ f1 + δ f 2 ) / Q ,
(3.1.28)
2
где δ y - относительная погрешность сигнала на выходе в линейном
приближении
δ y (1) = (δ f1 + f1 f 2 signf 2 δ f 2 ) / Q + δ x .
(3.1.28а)
Для математического ожидания и дисперсии относительной
погрешности имеем соответственно:
(1)
M [δ y] = M [δ f1 ]/ Q + f1 f 2 signf 2 M [δ f 2 ]/ Q + M [δ x] +
1
1
f1 f 2 signf 2 M [(δ f1 ) 2 ] / Q 2 + f1 f 2 signf 2 (1 + f1 f 2 signf 2 ) M [δ f1δ f 2 ] / Q 2 +
2
2
1
1
+ f12 f 2 2 M [(δ f 2 ) 2 ] / Q 2 + M [δ f1δ x](1 + f1 f 2 signf 2 ) / Q +
2
2
1
+ M [δ f 2δ x] f1 f 2 signf 2 / Q ,
(3.1.29)
2
D[δ y ] = D[δ f1 ] / Q 2 + f12 f 22 D[δ f 2 ] / Q 2 + D[δ x] +
1
1 4 4
2
2
+ D[(δ f1 ) 2 ] f1 f 2 / Q 4 + f1 f 2 D[(δ f 2 ) 2 ] / Q 4 +
4
4
+
1
D[δ f1δ f 2 ] f12 f 2 2 (1 + f1 f 2 signf 2 ) 2 / Q 4 + D[δ f1δ x] ⋅
4
1
1
(1 + f1 f 2 signf 2 ) 2 / Q 2 + D[δ f 2δ x] f12 f 2 2 / Q 2 .
2
4
(3.1.30)
δf i = const (i ) ,
то
выражения
Если
положить
математического ожидания и дисперсии упрощаются:
для
M [δ y ] = (1 + f1 f 2 signf 2 ) M [δ f1 ] / Q + M [δ x ] +
(1 + f1 f 2 signf 2 ) f1 f 2 signf 2 M [(δ f1 ) 2 ] / Q 2 +
+ M [δ f1δ x](1 + f1 f 2 signf 2 ) / Q ,
(3.1.29а)
D[δ y ] = (1 + f12 f 22 ) D[δ f1 ] / Q 2 + D [δ x ] +
1
+ D[(δ f1 ) 2 ]( f12 f 22 + f13 f 23 signf 2 + f14 f 24 ) / Q 4 +
2
1
D[δ f1δ x](1 + f1 f 2 signf 2 + f12 f 2 2 ) / Q 2 .
2
(3.1.30а)
Если к тому же погрешность входного сигнала пренебрежимо
мала (δ x = 0) , то выражения для математического ожидания и дисперсии преобразуются к виду
M [δ y ] =
1 + f1 f 2 signf 2
f f signf 2 (1 + f1 f 2 signf 2 )
M [δ f1 ] + 1 2
⋅
2
1 − f1 f 2 signf 2
(1 − f1 f 2 signf 2 )
(3.1.29б)
⋅M [(δ f1 ) ]
2
D [δ y ] =
1 + f12 f 22
(1 − f
1
2
⋅D ⎡(δ f1 ) ⎤ .
⎣
⎦
f 2 signf 2 )
2
D [δ f1 ] +
2 2
2 2
1 f1 f 2 (1 + f1 f 2 signf 2 + f1 f 2 )
⋅
4
2
(1 − f1 f 2 signf 2 )
(3.1.30б)
Из соотношений (3.1.29б, 3.1.30б) следует, что при f1=f2=1 и
signf2=−1(отрицательная обратная связь) M [δy ] в линейном
приближении, вообще говоря, не равно нулю и зависит от M [δ f1 ] ;
этот вывод справедлив и в квадратичном приближении; для
дисперсии имеем D[δy ] = D[δf1 ] 2 , т.е. результат получается таким
же, как и в параллельной схеме с двумя элементами. При
положительной обратной связи, когда f1=f2=1 и signf2=1, M [δy ] и
D[δy ] не определены, а именно, M [δy ] → ∞ и D[δy ] → ∞ . Их
конечность можно обеспечить только при M [δf ] = 0 и D[δf ] = 0 .
Полученные соотношения для погрешности выходного сигнала
типовых схем позволяют провести анализ и расчет погрешности
измерения для СИ, имеющих сложную структуру, которая
представлена в виде комбинации типовых структур.
Рассмотрим в качестве примера измерительную систему на
нейронных сетях (см. §1.3).Каждый нейрон сети представляет
собой систему с многими входами и одним выходом (см.
рис.13г), и погрешность преобразования рассчитывается из
соотношений (3.1.22), (3.1.22а). Первый слой является
параллельным объединением m нейронов, на вход каждого из
которых подается n сигналов. Второй слой (скрытый) состоит из
p нейронов, на вход каждого из которых подается m сигналов,
содержащих погрешности Δy (j1) , с выходов нейронов 1-го слоя. На
выходе каждого нейрона скрытого (2-го) слоя получается сигнал,
содержащий суперпозицию погрешностей Δy (j1) и Δy q(2 ) . На вход
каждого нейрона
третьего слоя
подается p сигналов,
(1)
(2 )
содержащих погрешности Δy j и Δy q с выходов нейронов 1-го и
2-го слоев. На выходе каждого нейрона 3-го слоя получается
сигнал, содержащий суперпозицию погрешностей Δy (j1) , Δy q(2 ) и
Δy r(3) , где Δy (j1) - погрешность преобразования при прохождении
первого слоя, определяемая соотношениями (3.1.22) или
(3.1.22а); j = 1, m ; Δy q(2 ) - погрешность преобразования при
прохождении второго (скрытого слоя), определяемая аналогично
первому слою; q = 1, p ; Δy r(3) - погрешность преобразования при
прохождении
сигналом 3-го слоя; r = 1, l . В линейном
приближении, используя соотношение (3.1.22), имеем систему
уравнений
n
Δy (j1) = ∑ S (j1)(i ) Δx (ji )
i =1
m
Δyq( ) = ∑ S q(
2
u =1
2 )( u )
Δyq(
u)
- для первого слоя,
(3.1.31а)
- для второго слоя,
(3.1.31б)
где Δy q(u ) - погрешность сигнала на входе нейрона q 2-го слоя,
получившаяся на выходе нейрона u 1-го слоя
p
Δy r(3 ) = ∑ S r(3 )(υ ) Δy r(υ )
- для 3-го слоя,
(3.1.31в)
υ =1
где Δy r(υ ) - погрешность сигнала на входе нейрона r 3-го слоя,
получившаяся на выходе нейрона υ 2-го слоя.
Из приведенных уравнений видно, что погрешность
сигнала
на
выходе
нейронной
сети
(погрешность
преобразования) зависит от погрешности сигнала на выходе
каждого нейрона 1-го и 2-го слоев.
Пример 1. Оценим
погрешность функционирования
измерительной системы на нейронных сетях с учетом
погрешности входного сигнала и погрешности преобразования.
Используем результаты § 1.3. Обозначим, как и выше, j=1,…,m число нейронов в первом (входном) слое, q=1,…,p - число
нейронов во втором (скрытом) слое, r=1,…,l - число нейронов в
третьем слое. Модель отдельного нейрона представляет собой
последовательное соединение сумматора n→1 (много входов –
один выход), персептрона и точки ветвления. Примем, что
сумматор вычисляет линейную функцию входов
n
gx ≡ g ( x) = ∑ ai xi + an+1 ,
(3.1.32)
i =1
где параметр an+1 соответствует аддитивной погрешности, а
некоторые параметры ai могут равняться нулю. Для персептрона
используем сигмоидальную функцию преобразования
f ( x) = (1+ exp(−kx))−1 .
(3.1.33)
Для нейрона
первого слоя сети погрешность на выходе
сумматора дается следующим соотношением
n
n
i =1
i =1
i)
i)
Δz j = ∑ S (1)(
Δx(ji) + ∑ Δg (1)(
,
j
j
(3.1.34)
где Δxj(i) – погрешность сигнала i на входе нейрона j; Sj(i) –
чувствительность сумматора нейрона j по входному сигналу i;
вторая сумма определяет погрешность преобразования,
вызванную отклонением реальной функции преобразования
сумматора от номинальной. В общем случае она представима в
виде
Δgx ≡ g ( x) − g0 ( x) = Δg (0) + (∂Δg / ∂x)0 x + ... .
(3.1.35)
В линейном приближении учитываются только два первых члена,
т.е. аддитивная и мультипликативная составляющие. Для Δzj
имеем (индекс (1) опущен)
n
Δz j = ∑
i =1
S (ji)Δx(ji) +
n
(a(ji) − a(ji0) ) x(ji) + an+1 .
∑
i =1
(3.1.36)
Сигнал zj + Δzj поступает на вход персептрона, на выходе
которого получаем
y j = f ( z j + Δz j ) = (1+ exp(−k j ( z j + Δz j )))−1 .
(3.1.37)
Используя разложение в ряд с точностью до членов, линейных по
Δzj, получим для сигнала на выходе с учетом погрешности
сигнала на входе
y j = f j z j (1 + k j Δz j ) ,
(3.1.38)
где fjzj≡fj(zj)≡fj. Если учесть также составляющую, обусловленную
погрешностью преобразования, то суммарная погрешность
сигнала на выходе нейрона j первого слоя дается выражением
(1) (1)
(1)
(1) (1)
Δy (1)
(3.1.39)
j = k j f j Δz j + Δf j z j .
Здесь
(1)
(1)
(1)
(1) (1)
Δf j(1) z (1)
j = f j (1 − f j )(k j − k j 0 ) z j ,
n
j)
(1)(i ) (1)(i )
z (1)
x j +an(1)(
,
j = ∑aj
+1
i =1
n
n
i)
i)
i ) (1)(i )
j)
(1)(i )
Δz (1)
Δx(1)(
+∑ (a(1)(
− a(1)(
+ an(1)(
j = ∑Sj
j
j
j 0 )x j
+1 .
i =1
(3.1.39а)
(3.1.39б)
(3.1.39в)
i =1
Из выражения (3.1.39) следует, что погрешность сигнала на
выходе зависит от входного сигнала и его погрешности. Для
второго слоя имеем
Δyq(2) = kq(2) f q(2) Δzq(2) + Δf q(2) zq(2) .
(3.1.40)
Здесь
(2)
Δf q(2) zq(2) = f q(2) (1− f q(2) )(kq(2) − kq(2)
(3.1.40а)
0 ) zq ,
m
q)
zq(2) = ∑ bq(2)(u ) yq(2)(u ) +bm(2)(
+1 ,
(3.1.40б)
u =1
Δzq(2)
m
=∑
u =1
Sq(2)(u ) Δyq(2)(u ) +
m
u ) (2)(u )
q)
(bq(2)(u ) − bq(2)(
) yq
+ bm(2)(
∑
0
+1 ,
u =1
(3.1.40в)
где Δyq(2) – погрешность сигнала на выходе нейрона q второго
слоя; Δyq(2)(u) – погрешность сигнала на входе нейрона q второго
слоя, получившаяся на выходе нейрона u первого слоя; yq(2)(u) –
сигнал на входе нейрона q второго слоя с выхода нейрона u
первого слоя
yq(2)(u ) = f u(1) zu(1) ,
(3.1.40г)
где zu(1) дается выражением (3.1.39б); а Δyq(2)(u) – выражением
(3.1.39), при этом следует положить j=u. Аналогично для
погрешности сигнала на выходе нейрона r третьего слоя
(погрешности результата измерения) можно записать
Δyr(3) = kr(3) f r(3)Δzr(3) + Δf r(3) zr(3) .
(3.1.41)
Здесь
(3)
Δf r(3) zr(3) = f r(3) (1− f r(3) )(kr(3) − kr(3)
0 ) zr ,
zr(3)
p
r)
= ∑ cr(3)(v) yr(3)(v) +c(3)(
p +1 ,
Δzr(3)
(3.1.41а)
(3.1.41б)
v =1
p
=∑
v =1
Sr(3)(v)Δyr(3)(v) +
p
v ) (3)(v )
r)
(cr(3)(v) − cr(3)(
) yr
+ c(3)(
∑
0
p +1 ,
v =1
(3.1.41в)
где Δyr(3) – погрешность сигнала на выходе нейрона r третьего
слоя; Δyr(3)(v) – погрешность сигнала на входе нейрона r третьего
слоя, получившаяся на выходе нейрона v второго слоя; yr(3)(v) –
сигнал на входе нейрона r третьего слоя с выхода нейрона v
второго слоя
yr(3)(v) = f v(2) zv(2) ,
(3.1.41г)
где zv(2) и Δyr(3)(v) даются выражениями (3.1.40б) и (3.1.40)
соответственно, при этом следует положить q= v.
Пример 2. Пусть входные сигналы xi, поступающие на вход
нейронной сети, являются нечеткими, т.е. представимы в виде
нечетких
чисел
или
нечетких
интервалов.
Функции
преобразования сумматора и персептрона также будем считать
нечеткими,
что
позволяет
учесть
неопределенность
(погрешность) преобразования, используя соответствующий
способ задания сигналов и функций. В этом случае выходной
сигнал получается нечетким и содержит неопределенность,
обусловленную нечеткостью входного сигнала и параметров
нейронной сети. Рассмотрим цепочку преобразований на входе
~
нейрона j первого слоя сети. Определим нечеткую функцию g ( x)
из соотношения (3.1.32). Сначала
~
произведения вида ai xi . Имеем для i=1
μa~x (o1(1 j ) ) =
sup
o1(1 j ) =u1(1 j )v1(1 j )
11
вычислим
min(μ ~ (u1(1 j ) ), μ ~ (v1(1 j ) )) .
a1
x1
нечеткие
(3.1.42а)
Здесь и далее мы будем использовать операции sup и min для
объединения и пересечения, хотя возможны и другие пары
операций, например, sup• (• -произведение), inf sum и т.д.
Аналогично для произвольного i можно записать
μa~x (oi(1 j ) ) =
i i
sup
oi(1 j ) =ui(1 j )vi(1 j )
min(μ ~ (ui(1 j ) ), μ ~ (vi(1 j ) )) ,
(3.1.42б)
min(μ ~ (un(1 j ) ), μ ~ (vn(1 j ) )) .
(3.1.42в)
ai
xi
Наконец, для i=n
μa ~x (on(1 j ) ) =
n n
sup
on(1 j ) =un(1 j )vn(1 j )
an
xn
Теперь определим операцию суммирования
μ
μ
~
g2(1 j )
~
gi(1 j )
(t2(1 j ) ) =
(ti(1 j ) ) =
sup
min(μ
sup
min(μ
t2(1 j ) =o1(1 j ) +o2(1 j )
ti(1 j ) =ti(1−1j ) +oi(1 j )
~
~
a1x1
(o1(1 j ) ), μ
~
gi(1−1j )
(o2(1 j ) )) ,
(3.1.43а)
(oi(1 j ) )) ,
(3.1.43б)
~
a2 x2
(ti(1−1j ) ), μ
~
ai xi
~
где i=2,…,n; g1 = a1x1 . На выходе сумматора получается нечеткий
сигнал, определяемый выражением
μ
~
gn(1+1j )
(tn(1+j1) ) =
sup
tn(1+1j ) =tn(1 j ) +un(1+1j )
min(μ
~
gn(1 j )
(tn(1 j ) ), μ
~
an+1
(un(1+j1) )) .
(3.1.44)
Этот сигнал поступает на вход персептрона с нечеткой
функцией преобразования вида (3.1.33). Имеем цепочку
соотношений
μ
μ
μ
~
k (1 j ) gn(1+1j )
( ρ (1 j ) ) =
~
− k (1 j ) gn(1+1j )
μ
min(μ
sup
min(1, μ
ρ (1 j ) = ρ1(1 j ) ⋅tn(1+1j )
(ω (1 j ) ) =
~
exp( − k (1 j ) gn(1+1j ) )
sup
ω (1 j ) =− ρ (1 j )
(ω1(1 j ) ) =
~
1+exp( − k (1 j ) gn(1+1j ) )
( ρ1(1 j ) ), μ
~
k (1 j ) gn(1+1j )
sup
min(1, μ
sup
min(1, μ
ω1(1 j ) =exp(ω (1 j ) )
(ω2(1 j ) ) =
~
k (1 j )
ω2(1 j ) =1+ω1(1 j )
~
gn(1+1j )
(tn(1+j1) )) , (3.1.45)
( ρ (1 j ) )) ,
~
− k (1 j ) gn(1+1j )
(3.1.46)
(ω (1 j ) )) , (3.1.46а)
~
exp( − k (1 j ) gn(1+1j ) )
(ω1(1 j ) )) .
(3.1.46б)
Выходной сигнал нейрона j первого слоя сети дается
выражением
(3.1.47)
μ ~ (w(1 j ) ) =
sup
min(1, μ
(ω2(1 j ) )) ,
~
yj
где
1+exp( − k (1 j ) gn(1+1j ) )
w(1 j ) =(ω2(1 j ) )−1
j=1,2….m;
~
y j = (1+ exp(− k
~
(1 j )
m-число
нейронов
~
~
(1 j )
(1 j ) −1
gn+1 )) ; gn
в
первом
~
~
~
(1 j )
= a1x1+ ... + an xn ; gn+1
слое
=
сети;
~
~
(1 j )
gn + an+1 .
Отметим, что соотношения (3.1.42а –3.1.47) могут быть
записаны
в
альтернативной
форме
через
α-срезы
соответствующих нечетких множеств. Сигналы вида (3.1.47) с
выходов нейронов первого слоя подаются на вход каждого
нейрона второго слоя сети. Имеем цепочку преобразований,
аналогичную таковой для первого слоя с заменой индексов и
~
~
~
~
~
~
(1 j )
(2q )
.
обозначений: (1j)→(2q); n→m; ai → b j ; xi → y j ; k → k
На выходе нейрона q второго слоя сети получаем сигнал,
определяемый соотношением
μ z~ (w(2q) ) =
q
sup
w(2 q ) =(ω2(2 q ) )−1
~
min(1, μ
где q =1,…,p; zq = (1+ exp(− k
~
(2 q ) )
1+exp( − k (2 q ) gm
+1
~
(2q )
~
(2q ) −1
gm+1 )) ;
(ω2(2q) )) ,
~
(2q )
gm
~
(3.1.48)
~
= b1 y1+ ... + bm ym ;
~
~
~
gm(2+q1) = gm(2q) + bm+1 .
Сигналы вида (3.1.48) с выходов нейронов второго слоя
подаются на вход каждого нейрона третьего слоя. Выражение для
сигнала на выходе нейрона r третьего слоя получается из
соотношений типа (3.1.42а – 3.1.47) с заменой индексов и
~
~
~
~ ~
~
(1 j )
(3r )
k
→
k
. В
обозначений (1j)→(3r); n→p; ai → cr ; xi → zr ;
итоге получаем
μv~ (w(3r ) ) =
r
sup
w(3r ) =(ω2(3r ) )−1
~
min(1, μ
где r =1,…,l; vr = (1+ exp(− k
~
(3r )
g p+1
=
~
r) )
1+exp( − k (3r ) g (3
p+1
~
(3r )
~
(3r ) −1
g p+1 )) ;
(ω 2(3r ) )) ,
~
(3r )
gp
~
(3.1.49)
~
= c1z1+ ... + c p z p ;
~
~
(3r )
g p + c p+1 .
Выражение (3.1.49) позволяет определить сигнал на выходе
нейронной сети (результат измерения) и его неопределенность,
зависящую от неопределенности нечетких входных сигналов и
нечетких параметров сети. Достоверность результата измерения
(3.1.49) определяется сравнением с индексом нечеткости ν
~
множества vr . Результат считается достоверным, если
μ ~ (w) >ν .
vr
Таким образом, в случае четких входных сигналов
погрешность сигнала на выходе любого нейрона третьего слоя
сети (погрешность результата измерения) зависит от выходных
сигналов (и их погрешностей) всех нейронов предыдущих слоев.
В нечетком случае функция принадлежности, характеризующая
выходной сигнал и его неопределенность, зависит от функций
принадлежности выходных сигналов нейронов предыдущих
слоев.
3.2. Метрологический синтез
Под метрологическим синтезом понимается построение
структурной схемы СИ, удовлетворяющей заданным критериям
(показателям), то есть синтез представляет собой задачу
многокритериальной оптимизации. Как правило, используются
следующие группы критериев: функциональные критерии, к
которым
относятся
точность
измерений,
диапазон,
производительность (число измерений в единицу времени),
универсальность (число измеряемых величин) и т.п.; техникоэкономические, к которым относятся стоимость, эксплуатационные
расходы, надежность, долговечность и т.п.; эргономические
критерии, отражающие удобство для пользователя, например,
безопасность, удобство эксплуатации, простота эксплуатации и
обслуживания, дизайн и т.д.. В ряде случаев применяются
дополнительные критерии, связанные с конкретными условиями
функционирования,
например,
степень
автоматизации,
Kjпомехозащищенность, габариты, и т.д. Обозначим
критерии; j = 1,2,..., n . Достижимые значения критериев зависят
прежде всего от типа схемы TS и числа входов-выходов N, так что
выбор оптимальной схемы определяется выражением:
(S ) T , N .
S * = arg max
K
(S )
S∈Σ
(3.2.1)
Здесь K(S) – общий критерий, характеризующий систему (структуру
S), получаемый сверткой частных критериев K j :
K (S ) = F (K j (TS , N )) ,
где F – операция свертки (агрегирования) по критериям K j .
Часто задачу оптимизации заменяют задачей обеспечения, когда
значения критериев не должны быть меньше некоторых допустимых
значений:
S * = {S ∈ Σ : K (jS ) (TS , N ) ≥ K j 0 },
(3.2.1а)
где K j 0 – допустимое значение j-го критерия, Σ – множество
допустимых систем.
В общем виде задача многокритериальной оптимизации вида
(3.2.1) не поддается конструктивной формализации, декомпозиции, и
однозначному решению, поэтому используют различные упрощения.
Одним из распространенных подходов является применение
эвристического метода. Он состоит в том, что лицо принимающее
решение (ЛПР), например, проектировщик, на основе информации о
предметной области формирует исходное множество допустимых
решений (допустимых структур СИ). На втором этапе методом
перебора строится множество Парето- решений (эффективных
решений), каждое из которых имеет максимальное возможное
значение хотя бы одного критерия. На этом этапе исследуются
предельные возможности различных типов схем по заданным
критериям. Затем из множества эффективных решений определяется
наилучшее возможное решение, являющееся субоптимальным.
Построение множества Парето и выбор субоптимального решения
осуществляется ЛПР непосредственно или в режиме интерактивного
диалога с ЭВМ. Обычно субоптимальных решений оказывается
несколько, поэтому для получения однозначного решения
используют дополнительные условия, например, минимизация
стоимости, максимизация надежности и т.п. Многокритериальную
задачу можно упростить, если её условия позволяют определить
главный критерий. Для СИ в качестве главного критерия часто
используется какая-то характеристика точности измерений. В этом
случае задача синтеза становится однокритериальной при
дополнительных ограничениях по другим критериям; ее решение
может быть получено известными методами, например, методом
множителей Лагранжа. Для сведения многокритериальной задачи к
однокритериальной кроме метода главного критерия используются
также метод свертки, метод пороговых критериев, метод расстояния
[41]. После того как решена задача структурного синтеза, решается
задача параметрического синтеза, то есть выбора параметров
элементов схемы, структура которой фиксирована. При этом
считаются известными также условия эксплуатации и технология
изготовления. Рассмотрим постановку задачи параметрического
синтеза для нескольких характерных случаев.
Минимизация стоимости СИ. Обозначим y 0 j – номинальные
значения параметров; Δ j – технологические допуски для
соответствующих параметров; j = 1,2,..., m , где m – число
параметров; cij – стоимость изготовления i -го элемента по
параметру j : cij = ci ( y0 j , Δ j ) . Положим для простоты, что каждый
элемент характеризуется одним точностным параметром. Будем
также считать, что номинальные значения определены, тогда
используя аддитивную свертку, наилучшее решение можно
записать в виде решения, минимизирующего среднюю
взвешенную стоимость СИ:
n
Δ* = arg min
Δ j ∈D j
y0 j ∈Y j
∑ pc (y
i i
i =1
0j
,Δj ),
(3.2.2)
где pi – важность (вес) i -го элемента; Υ j , D j – области задания
номинальных значений и допусков соответственно. В более
общем случае решение записывается в виде:
Δ* = arg min F ( pi ci ( y0 j , Δ j ) ) ,
(3.2.2а)
Δ ∈D
j
j
y0 j ∈Y j
где F – функция (функционал) усреднения по индексу i ,
зависящая от структурной схемы и условий задачи.
Как правило вводится дополнительное условие по
надежности, чтобы решение было однозначным и приемлемым:
Pt (y 0* , Δ* ) ≥ Pдоп ,
(3.2.3)
где Pt – вероятность безотказной работы в течение времени t ; Pдоп –
допустимое значение вероятности безотказной работы; y 0* – вектор
номинальных значений параметров для оптимального решения.
Максимизация надежности СИ. Вторая альтернативная
постановка задачи связана с максимизацией надежности при
ограничении по стоимости СИ. В тех же обозначения имеем:
Δ* = arg max F ( pi Pt ,i ( y0 j , Δ j ) ) ,
(3.2.4)
Δ ∈D
j
j
y0 j ∈Y j
при условии с ( y0* , Δ* ) ≤ cдоп , где cдоп – допустимое значение стоимости
СИ; F – функция (функционал), определяемая типом структурной
схемы.
Решение задач (3.2.2.), (3.2.4.) может быть получено
численными методами в режиме интерактивного диалога с ЭВМ
[6, 10, 41], при этом ЛПР задает желаемые значения запаса по
стоимости (надежности) по каждому параметру, исходя из
некоторого приближения, а затем корректирует значения
параметров по результатам расчета на ЭВМ. Для типовых схем,
рассмотренных в §3.1, задача оптимизации по одному
функциональному критерию, например по критерию точности,
может быть решена в явном виде. Рассмотрим примеры.
Пример 1. Пусть требуется минимизировать погрешность
преобразования Δy пр . В качестве критерия можно использовать
среднее значение модуля ошибки или средний квадрат ошибки. В
последнем случае критерий оптимизации имеет вид:
{
}
M ⎡⎣ Δyпр ⎤⎦
2
=
xmax
∫ {M ⎡⎣ f ( x,α ) − f ( x )⎤⎦}
i
2
0
dx ,
(3.2.5)
xmin
где α i – параметры СИ данного типа. Так как M [ f 0 ] = f 0 , то
выражение (3.2.5) принимает вид:
{M ⎡⎣Δy ⎤⎦}
пр
2
=
xmax
∫ {M ⎡⎣ f ( x,α )⎤⎦ − f
i
0
( x )}
2
dx .
(3.2.6)
xmin
Минимизация выражения (3.2.6) позволяет найти значения
параметров α i , соответствующие предельному значению
погрешности преобразования.
Пример 2. Пусть требуется минимизировать дисперсию
случайной погрешности измерений для СИ данного типа. Решение
этой задачи зависит от структурной схемы СИ.
Последовательная схема. Воспользуемся выражением (3.1.7)
для дисперсии погрешности:
k
D [ Δy ] = ∏ Si2 D [ Δx ] = S02 D [ Δx ] → min ,
i
i =1
где
(3.2.7)
S 0 – заданная чувствительность схемы.
Из (3.2.7) следует, что уменьшить дисперсию погрешности
измерений можно за счет уменьшения дисперсии входного
сигнала и чувствительности схемы. Наибольший вклад в
изменение дисперсии погрешности вносят элементы с малой
чувствительностью. При минимизации дисперсии относительной
погрешности сигнала на выходе используем выражение (3.1.12) в
линейном приближении:
k
∑ D [δ f ] + aD [δ x ] → min
i =1
i
i
(3.2.8)
k
при дополнительном условии ∏ fi = f 0 , где a – коэффициент,
i =1
зависящий от параметров схемы (a=1, если fi – постоянные
величины) f 0 – заданная функция преобразования.
Из соотношения (3.2.8) следует, что уменьшить дисперсию
можно, уменьшая дисперсию погрешности преобразования
отдельных элементов и сокращая число элементов схемы.
Параллельная схема. Из выражения (3.1.13) имеем для
дисперсии погрешности:
2
⎛ k ⎞
D [ Δy ] = ⎜ ∑ Si ⎟ D [ Δx ] = S02 D [ Δx ] .
⎝ i =1 ⎠
(3.2.9)
Из (3.2.9) следует, что наибольший вклад в изменение
дисперсии вносят элементы с большой чувствительностью.
При минимизации дисперсии относительной погрешности из
(3.1.20) в линейном приближении имеем:
2
k
∑ D [δ f ] ⋅ f
i =1
i
2
i
⎛ k ⎞
,
⎜ ∑ fi ⎟ + aD [δ x ] → min
i
⎝ i =1 ⎠
(3.2.10)
k
при дополнительном условии ∑ fi = f 0 , где a – коэффициент,
i =1
f i – постоянные
зависящий от параметров схемы (a=1, если
величины).
Используя метод множителей Лагранжа и приравнивая к
нулю частные производные по f i , получим после несложных
преобразований, что минимум дисперсии достигается при
f1 = f 2 = K = f k и соответственно D [δ fi ] = const ( i ) , т.е. при одинаковой
дисперсии функций преобразования элементов схемы:
1
D [δ y ]min = D [δ fi ] + D [δ x ] .
(3.2.11)
k
Таким образом, в параллельной схеме составляющая
дисперсии относительной погрешности за счет погрешности
преобразования отдельных элементов уменьшается в k раз. Не
следует забывать, однако, что при этом может увеличиваться
дисперсия
абсолютной
погрешности,
обусловленная
погрешностью входного сигнала.
Аналогично можно рассмотреть и другие типы схем. Так для
схемы с обратной связью имеем из (3.1.26):
D [ Δy ] =
S1 D [ Δx ]
2
(1 − f1 f 2 signf 2 ) 2
.
(3.2.12)
Результат для этого случая аналогичен параллельной схеме,
т.е. уменьшением чувствительности прямой и обратной ветви, а
также дисперсии погрешности входного сигнала можно
уменьшить дисперсию абсолютной погрешности измерения.
При минимизации дисперсии относительной погрешности
выходного сигнала для схемы с обратной связью из соотношения
f = f1 (1 − f 1 f 2 sign f 2 )
(3.1.30) при дополнительном условии
получим результат, аналогичный случаю параллельной схемы с
двумя элементами. В частности, условие минимума дисперсии
имеет вид
− f1 f 2 sign f 2 = 1 .
(3.2.13)
С другой стороны, при выполнении соотношения (3.2.13)
справедливо равенство D[δ f1 ] = D[δ f 2 ] , как для параллельной схемы
при k=2. При положительной обратной связи условие минимума
может быть обеспечено лишь при D1 = D2 = 0 .
В ряде случаев необходимо иметь информацию о
вероятностных характеристиках погрешности, в качестве которых
используются доверительный интервал и доверительная
вероятность. Выберем за критерий оптимизации доверительный
интервал, в который с заданной вероятностью попадает значение
погрешности
P {−α ≤ δ ≤ α } =
α
∫
−α
α
p (δ ) d δ = 2 ∫ p (δ ) d δ
0
,
(3.2.14)
где p(δ ) - плотность вероятности распределения погрешности;
причем математическое ожидание погрешности равно нулю.
Последовательная схема. Предположим, что погрешности
элементов схемы δ fi независимы и одинаково распределены.
Рассмотрим два практически важных случая: нормальное и
равномерное распределение погрешностей δ fi для элементов
схемы.
Нормальное
распределение.
Так
как
относительная
погрешность выходного сигнала δ y равна сумме погрешностей
элементов схемы (см. соотношение (3.1.9)), то из центральной
предельной теоремы следует, что δ y имеет также нормальное
распределение с математическим ожиданием и дисперсией,
определяемыми по (3.1.11) и (3.1.12) соответственно. Тогда
вероятность попадания погрешности δ y в заданный интервал при
достаточно большом k дается выражением
P ( M [δ y ] ≤ δ y ≤ M [δ y ] + t D [δ y ] ) = Φ ( t ) − Φ 0 ,
(3.2.15)
где Φ ( t ) , Φ 0 – значения функции нормального распределения,
определяемые
по таблицам;
t –безразмерный
параметр:
δ − M [δ y ]
t=
.
D[δ y ]
Так, например, при t = 2 вероятность попадания δ y в
P ( t = 2 ) = 0,98 − 0,5 = 0, 48 ;
соответствующий
интервал
при t = 3 : P ( t = 3) = 0,999 − 0,5 = 0, 499 . Следует отметить, что мы
выбрали половину симметричного интервала относительно
математического ожидания. Если принять, что M [δ fi ] = const ( i ) и
D [δ fi ] = const ( i ) , т.е. все элементы схемы в статистическом смысле
эквивалентны, то из полученных выше соотношений (3.1.11,
3.1.12, 3.2.15) следует, что доверительный интервал возрастает в
k раз по сравнению с одним элементом. Положим k = 10 , т.е. в
схеме объединены 10 элементов, и M [δ fi ] = 0 , тогда доверительная
вероятность попадания величины δ y в тот же доверительный
интервал, что и для отдельного элемента при t = 2 , т.е. в интервал
⎡ 0, t D [δ f i ] ⎤ , составит: P (t = 2 10 ) = 0,73 − 0,5 = 0,23 , т.е. всего 23%
⎣
⎦
(против 50% для отдельного элемента). Таким образом,
последовательная схема статистически менее надежна, или при
той же доверительной вероятности, что и для отдельного
элемента, точность функционирования ниже в k раз.
Равномерное распределение. В этом случае, если погрешность
для i-го элемента схемы изменяется в пределах [0,α i ] , то для схемы
из k элементов δ y будет заключено в интервале ⎡⎢0, ∑α i ⎤⎥ . Отсюда
i =1
k
⎣
следует, что математическое ожидание равно:
дисперсия
D [δ y ] =
1 k 2
∑αi
12 i =1
⎦
M [δ y ] =
1 k
∑αi ;
2 i =1
. Вид распределения величины δ y
зависит от k. Так при k=2 получается треугольное распределение.
При большом k (практически, при k>5) распределение δ y
приближается к нормальному с функцией плотности:
⎧⎪ (δ y − M [δ y ])2 ⎫⎪
p (δ y ) =
⋅ exp ⎨ −
⎬.
2 D [δ y ]
2π D [δ y ]
⎪⎩
⎭⎪
1
(3.2.16)
δy
Вероятность попадания
в заданный интервал
рассчитывается аналогично случаю нормального распределения из
соотношения (3.2.15). Для произвольного k плотность
нормированного
распределения
суммы
k
равномерно
распределенных величин имеет вид
p (δ y ) =
f k (x ) =
[
k ⎛k
k ⎞
f k ⎜⎜ + δ y
⎟
12 ⎝ 2
12 ⎟⎠
,
(3.2.17)
]
1
k −1
k −1
x k −1 − C n1 ( x − 1) + C n2 ( x − 2) + K ,
(n − 1)!
(3.2.18)
где 0<x<k, а суммирование продолжается до тех пор, пока
x, x − 1, x − 2, …K
остаются
положительными.
аргументы
Вероятность попадания δ y в заданный интервал, например [0, α]
рассчитывается при малых k непосредственно
α
P {0 ≤ δ y ≤ α } = ∫ p (δ y ) d δ y ,
(3.2.19)
0
где p (δ y ) дается соотношением (3.2.17).
Параллельная схема. Рассмотрение проводится аналогично
случаю последовательной схемы с тем различием, что мы имеем
взвешенную сумму независимых случайных величин. Положим
для простоты
M [δ fi ] = const ( i ) ,
D [δ f i ] = const ( i ) ,
f i = const (i ) .
Используя соотношения (3.1.19, 3.1.20), найдем, что вероятность
⎛
⎞
1
D [δ fi ] ⎟⎟ равна для
⎜⎜ M [δ fi ] , M [δ fi ] + 2
k
⎝
⎠
распределения
величин
δ fi :
P ( t = 2 ) = 0, 48;
попадания δ y в интервал
нормального
P ( t = 3) = 0, 499 . Однако при той же вероятности ширина
доверительного интервала будет в k раз меньше, чем для
отдельного элемента схемы. Вероятность попадания погрешности
для схемы из 10 элементов в тот же доверительный интервал, что
и
для
отдельного
элемента
схемы
равна:
P δ y ∈ ⎡0, 2 kD [δ fi ] ⎤ = P ( t = 2 10 ) = 1 − 0,5 = 0,5 , в то же время для
⎣
⎦
{
}
отдельного элемента она равна 0,48. При небольшом числе
элементов, например, при k=2: P (t = 2 2 ) = 0,997 − 0,5 = 0,497 .
Таким образом, для параллельной схемы обеспечивается
более высокая статистическая надежность результата измерения,
чем для отдельного элемента, при той же точности
функционирования. Отметим, что этот вывод получен при учете
влияния только погрешностей функций преобразования
отдельных элементов, распределенных по нормальному закону.
Схема с обратной связью. Результаты для нее аналогичны
параллельной схеме при k=2.
Выведем соотношения между доверительным интервалом и
вероятностью для равномерного распределения при k=2 и k=3.
При k=2 сумма двух равномерно распределенных величин, каждая
из которых распределена симметрично в интервале [− α ,α ] , имеет
треугольное распределение с функцией плотности:
⎧
⎪ 0 ; x ∉ [ −2α , 2α ] ,
⎪
x
⎪ 1
p2 ( x ) = ⎨ + 2 ; −2α ≤ x ≤ 0,
⎪ 2α 4α
x
⎪ 1
⎪⎩ 2α − 4α 2 ; 0 ≤ x ≤ 2α .
(3.2.20)
Центр распределения помещен в нуле, а интервал изменения
переменной x : [− 2α , 2α ] . Вероятность попадания погрешности в
интервал [− Δ , Δ ] определяется из соотношения:
P {−Δ ≤ δ y ≤ Δ} =
Δ
∫ p (δ y ) d δ y .
2
(3.2.21)
−Δ
Подставляя
найдем:
p2 ( δ y )
из (3.2.20) и проводя интегрирование,
P {−Δ ≤ δ y ≤ Δ} =
Δ ⎛
Δ ⎞
⋅ ⎜1 −
.
α ⎝ 4α ⎟⎠
(3.2.22)
Математическое ожидание величины δ y : M [δ y ] = 0 , так как
мы рассматриваем симметричное распределение относительно
нуля.
Если центр распределения поместить в произвольной точке c,
то M [δ y ] = c , однако это не сказывается на дальнейших
результатах. Дисперсия δ y :
2
D [δ y2 ] = α 2 .
3
Напомним, что для
равномерного распределения в интервале [− α ,α ] дисперсия равна:
D [δ y ] = α 2 / 3 .
Для треугольного распределения вероятность попадания δ y в
P {δ y ∈ [ −α , α ]} = 75% ,
интервал [− α ,α ] равна по (3.2.22):
в то же время для равномерного распределения P{δ y ∈ [− α , α ]} = 1 .
Проведем аналогичное рассмотрение для k=3 (схема с тремя
элементами) при равномерном распределении погрешностей для
отдельных элементов. Будем, как и выше, считать что интервал
изменения погрешности для отдельного элемента [− α ,α ] , т.е.
одинаков для всех элементов. В этом случае плотность
распределения квадратично зависит от случайной величины,
поэтому будем называть это распределение в дальнейшем
квадратичным полиномиальным (треугольное распределение
является в этом смысле линейным полиномиальным). Плотность
распределения состоит из трех полиномов. Применяя условия
непрерывности плотности и ее первой производной, а также
условие нормировки, после вычислений получаем выражение
функции плотности суммы трех величин, равномерно
распределенных в интервале [− α ,α ] в виде:
2
⎧ 1
⎪ 16α 3 ( x − ( c − 3α ) ) при x ∈ [ c − 3α , c − α ]
⎪
1
3
2
⎪
при x ∈ [ c − α , c + α ] ,
p3 ( x ) = ⎨ − 3 ( x − c ) +
8
8
α
α
⎪
2
⎪ 1
⎪16α 3 ( x − ( c + 3α ) ) при x ∈ [ c + α , c + 3α ]
⎩
(3.2.23)
где x – произвольная случайная величина, c – центр
распределения; [− 3α , 3α ] – интервал изменения величины x.
Вероятность попадания погрешности в интервале [− Δ , Δ ]
определяется соотношением:
P{δy ∈ [− Δ, Δ ]} =
c+Δ
∫ p (δy )dδy
(3.2.24)
3
c−Δ
Интеграл разбивается на три слагаемых:
c +Δ
∫
c −Δ
p3 (δ y ) dδ y =
c −α
∫
c −3α
p3 (δ y ) d δ y +
c +α
∫
c −α
p3 (δ y ) d δ y +
c + 3α
∫
p3 (δ y ) d δ y
c +α
(3.2.25)
После довольно громоздких расчетов для вероятности
получается следующее выражение:
1 ⎛ 1 Δ3
Δ2
Δ ⎞
P{δy ∈ [− Δ, Δ ]} = ⎜⎜
−
3
+ 9 − 1⎟⎟ .
3
2
8⎝3α
α ⎠
α
(3.2.26)
Математическое ожидание и дисперсия случайной величины
для этого распределения равны соответственно: M [δy ] = c; D[δy ] = α 2 ,
в чем легко убедиться непосредственным вычислением.
Вероятность попадания δ y в интервал [− α ,α ] из (3.2.26) равна:
P{δy ∈ [− α ,α ]} =
2
≈ 67% .
3
Рассмотрим
несколько
примеров
на
применение полученных соотношений.
Пример 1. Предположим, что реальное распределение
погрешности является квадратичным полиномиальным с
функцией плотности, задаваемой соотношением (3.2.23).
Определим ошибку неадекватности модели для двух случаев: а)
при аппроксимации треугольным распределением; б) при
аппроксимации
равномерным
распределением.
При
аппроксимации
треугольным
распределением
дисперсия
2
погрешности составит по (3.2.20):
2 ⎛ 3α ⎞
3
D2 [δy ] = ⋅ ⎜ ⎟ = α 2 .
3 ⎝ 2 ⎠
2
При
аппроксимации равномерным распределением дисперсия равна:
2
(
3α )
D [δy ] =
1
3
= 3α 2 .
Для реального распределения (квадратичного
полиномиального), как следует из (3.2.23), дисперсия равна:
D3 [δy ] = α 2 , т.е. ошибка неадекватности весьма значительная.
Вероятность
попадания
погрешности
δy
в
интервал
⎡ − D [δ y ] , D [δ y ] ⎤
составляет для равномерного распределения:
⎣
⎦
{
} {
}
α 3 1
P1 δ y ∈ ⎡ − D [δ y ] , D [δ y ] ⎤ = P1 δ y ∈ ⎡⎣ −α 3, α 3 ⎤⎦ =
=
= 58% ;
⎣
⎦
3α
3
треугольного
{ [
распределения
]} { [
из
]}
P2 δy ∈ − D[δy ], D[δy ] = P2 δy ∈ − α 3 2 ,α 3 2 =
для
(3.2.22):
1,5 ⎛⎜
1,5 ⎞⎟
= 65% .
⋅ 1−
1,5α ⎜⎝ 4 ⋅ 1,5α ⎟⎠
Для квадратичного полиномиального (реального) распределения:
P3 {δy ∈ [− D[δy ], D[δy ]]} = P3 {δy ∈ [− α ,α ]} = 67% (см. выше).
Таким образом, систематическая ошибка неадекватности
модели для вероятности составляет –2% при замене реального
распределения треугольным и –9% при использовании
равномерного распределения (для доверительного интервала
⎡ − D [δ y ] , D [δ y ] ⎤ ).
⎣
⎦
Пример 2. Рассмотрим, как сказывается тип схемы на
значении доверительной вероятности при k=2 и k=3 в случае
равномерного распределения погрешностей для отдельных
элементов.
Последовательная схема. В этом случае, как показано выше
(см.
§3.1),
дисперсия
возрастает
и
равна
при
где
δy1 –
k = 2 : D2 [δ y2 ] = 2 D1 [δ y1 ] ; при
k = 3 : D3 [δ y3 ] = 3D1 [δ y1 ] ,
погрешность для отдельного элемента схемы.
Определим
доверительную
вероятность
попадания
погрешности в интервал ⎡⎣ − D [δ y ], D [δ y ] ⎤⎦ . Для отдельного
элемента
{
схемы
в
случае
}
P1 δ y1 ∈ ⎡ − D [δ y1 ] , D [δ y1 ] ⎤
⎣
⎦
(треугольное
{
}
P2 δ y2 ∈ ⎡ − D [δ y2 ] , D [δ y2 ] ⎤
⎣
⎦
(квадратичное
равномерного
распределения:
= P1 {δ y1 ∈ ⎡⎣ − α 3 , α 3 ⎤⎦} = 58% . При k=2
распределение):
= P2 {δ y2 ∈ ⎡⎣ −α 2 3 , α 2 3 ⎤⎦} = 65% . При k=3
полиномиальное
{
распределение):
}
P3 δ y3 ∈ ⎡ − D [δ y3 ] , D [δ y3 ] ⎤ = P3 {δ y3 ∈ [ −α ,α ]} = 67% .
⎣
⎦
Вероятность
⎡ −2 D [δ y ] , 2 D [δ y ] ⎤
⎣
⎦
попадания
равна
распределения: P1 {δ y1 ∈ ⎡⎣ −2α
3 , 2α
погрешности
для
}
3 ⎤⎦ = 1 ,
(интервал превышает
[− α ,α ]
погрешности
Для
P2 {δ y2 ∈ ⎡⎣ −2α 2 3 , 2α 2 3 ⎤⎦} = 96,5% ,
для
пределы изменения
недопустимым).
в
интервал
равномерного
т.е. является
треугольного:
квадратичного
полиномиального (схема из 3-х элементов) P3 {δy3 ∈ [− 2α , 2α ]} = 96% .
Часто интерес представляет обратная задача, а именно, какой
доверительный интервал соответствует заданной вероятности.
Предположим, что задана доверительная вероятность Р=96%.
Тогда для схемы с тремя элементами (k=3) интервал составляет
(см. выше) Δ = 2α , т.е. 66,7% предельного интервала изменения
погрешности [− 3α , 3α ] ; для схемы с двумя элементами (k=2)
интервал составит из соотношения (3.2.22): Δ = 1,6α т.е. 80%
предельного интервала [− 2α , 2α ] ; наконец, для отдельного
элемента: Δ = 0,96α , т.е. 96% предельного интервала [− α ,α ] . Отсюда
следует, что агрегирование элементов в схему позволяет
обеспечить запас надежности при относительно более низкой
точности функционирования (этот результат справедлив для
равномерного распределения погрешностей).
Параллельная схема. В этом случае, как показано в §3.1,
дисперсия уменьшается и равна при k=2: D2 [δy 2 ] = D1 [δy1 ] 2 ; при
k=3: D3 [δy3 ] = D1 [δy1 ] 3 . Определим те же величины, что и для
последовательной схемы. При k=2 (треугольное распределение) и
k=3 (квадратичное полиномиальное распределение) получим для
⎡ − D [δ y ] , D [δ y ] ⎤ :
вероятности
попадания
в
интервал
⎣
⎦
{
P2 δ y2 ∈ ⎡⎣ − α
6 ,α
}
6 ⎤⎦ = 65% ; P3 {δ y3 ∈ [ − α 3 , α 3]} = 67% ,
т.е. имеем те
же результаты, что и для последовательной схемы. При расчетах
по (3.2.22), (3.2.26) учтено, что в данном случае изменилась не
только дисперсия, но и интервал, а именно, при k=2: α 2 = α 2 ; при
k=3: α 3 = α 3 , где [− α ,α ] – интервал изменения погрешности для
единичного элемента схемы при равномерном распределении.
Объясняется это тем, что из соотношения (3.1.18) погрешность δ y
для параллельной схемы равна взвешенной сумме погрешностей
отдельных элементов. При равенстве погрешностей вес равен 1/k,
т.е. статистически дело обстоит так, как если бы суммировались
величины, равномерно распределенные в интервале [ − α k ,α k ] с
дисперсией α 2 3k . Фактически погрешность схемы равна
погрешности отдельного элемента (см. соотношение (3.1.18)), т.е.
изменяется в интервале [− α ,α ] . Вероятность попадания в
удвоенный интервал равна:
P2 {δy 2 ∈ [− 2 α 6 , 2 α 6 ]} = 96,5% ; P3 {δy3 ∈ [− 2 α 3 , 2 α 3]} = 96% .
При решении обратной задачи получаем, что вероятность
P3 = 96% реализуется для доверительного интервала [ − 2α 3, 2α 3] ,
который составляет 2 3 или 66,7% предельного интервала; P2 = 96%
реализуется для интервала 0,8α , который составляет 80%
предельного, т.е. результаты аналогичны последовательной схеме.
Следует отметить, что в параллельной схеме при той же
доверительной
вероятности,
доверительные
интервалы
оказываются гораздо меньшими, что свидетельствует о большей
точности функционирования.
Таким образом, взаимосвязь доверительного интервала и
доверительной погрешности зависит от типа схемы и вида закона
распределения ошибок для элементов схемы.
Пример 3. Рассмотрим связь между доверительным
интервалом и вероятностью при больших и малых k для
равномерного распределения погрешностей. В этом случае
k
дисперсия дается выражением D [δ y ] = α 2 , где [− α ,α ] – интервал
3
изменения погрешности δ y1 отдельного элемента схемы.
Математическое ожидание M [δy ] = c . Связь между вероятностью и
доверительным интервалом при больших k определяется
соотношением (3.2.15) с функцией плотности
⎧⎪ ( x − c )2 ⎫⎪
p (δ y ) =
⋅ exp ⎨−
⎬,
δ
D
y
2
[
]
2π D [δ y ]
⎩⎪
⎭⎪
k
где D [δ y ] = α 2 .
3
1
(3.2.27)
Последовательная
схема.
Вероятность
попадания
погрешности для схемы из 10 элементов в доверительный
интервал, определяемый дисперсией для отдельного элемента,
равна: P {δ y10 ∈ ⎡⎣0,α 30 ⎤⎦} = P ( t = 1 10 ) − P0 = 0, 62 − 0,5 = 0,13 = 13% . Для
удвоенного интервала: P ( t = 2 10 ) − P0 = 0, 73 − 0,5 = 0, 23 = 23% .
Параллельная схема. Вероятность попадания погрешности для
схемы из 10 элементов в доверительный интервал, определяемый
дисперсией для отдельного элемента равна:
P {δ y10 ∈ ⎡⎣ 0, α 3 ⋅ 10 ⎤⎦} = P ( t = 10 ) − P0 = 0,999 − 0,5 = 0, 499 ;
Для
удвоенного интервала: P ( t = 2 10 ) − P0 = 1 − 0,5 = 0,5 .
При малых k расчеты проводятся по соотношениям (3.2.22) и
(3.2.26).
Последовательная схема. Вероятность попадания δ y в
интервал ⎡⎣ − D [δ y1 ], D [δ y1 ] ⎤⎦ , где δ y1 – погрешность для отдельного
элемента
при
(3.2.22):
P1 δ y2 ∈ ⎡ − D [δ y1 ] , D [δ y1 ] ⎤ = P1 {δ y2 ∈ ⎡⎣ − α 3 , α 3 ⎤⎦} = 49,5% .
При
⎣
⎦
удвоенном
интервале
P2 δ y2 ∈ ⎡ −2 D [δ y1 ], 2 D [δ y1 ] ⎤ = P2 {δ y2 ∈ ⎡⎣ − 2α 3 , 2α 3 ⎤⎦} = 82% .
⎣
⎦
{
{
k=2
}
равна
из
}
Для k=3 соответствующие величины по (3.2.26) равны:
P1 = 41%, P2 = 74% .
Параллельная схема. В тех же обозначениях, что и выше, при
k=2 имеем:
P1 {δy 2 ∈ [− D[δy1 ] , D[δy1 ]]} = P1 {δy 2 ∈ [− α 3 ,α 3 ]} = 82% ; P2 [δy 2 ] = 97,5% .
{
}
При k=3: P1 δ y3 ∈ ⎡⎣ − D [δ y1 ], D [δ y1 ] ⎤⎦ = P1 {δ y3 ∈ ⎡⎣ − α 3, α 3 ⎤⎦} = 91,5% ,
P2 [δ y3 ] = 1 .
Таким образом, параллельная схема обеспечивает более
высокую достоверность (надежность) результата измерения,
которая возрастает с увеличением числа элементов в схеме. Для
последовательной схемы наблюдается обратная закономерность, а
именно, увеличение числа элементов в схеме снижает
достоверность результата измерения. Из полученных результатов
следует, что в параллельной схеме нет смысла объединять
большое число элементов, так как уже при k =2…3 обеспечивается
достаточный уровень надежности. Для последовательной же
схемы снижение надежности с увеличением числа элементов не
носит катастрофического характера
3.3. Оптимизация динамических характеристик СИ
Рассмотрим СИ с передаточной функцией W (р), которая
определяется как отношение преобразований Лапласа выходного
сигнала y (t) к входному x (t):
L[ y (t )]
(3.3.1)
W ( p) =
L[x(t )]
Для большого класса СИ передаточная функция может быть
представлена в виде отношения полиномов:
m
W ( p) =
B( p)
=
D( p)
∑b p
i =0
n
∑a
j =0
i
i
j
p
,
(3.3.2)
j
где m ≤ n .
На практике для определения передаточной функции
используют в зависимости от вида входного контрольного
сигнала переходную функцию, импульсную (весовую) функцию
или комплексную частотную характеристику. Наиболее просто
передаточная функция определяется через весовую. Весовая
функция
w(t)
линейной
системы
при
условии
некоррелированности внутренних возмущений с входными
сигналами СИ определяется интегральным уравнением ВинераХопфа:
∞
R xy (τ ) = ∫ R xx (t − τ ) w(t )dt ,
(3.3.3)
0
где R xx (t − τ ) - ковариационная функция входного сигнала x (t);
R xy (τ ) - взаимная ковариационная функция входного и выходного
сигналов.
Определение w(t) из соотношения
(3.3.3)
является
некорректной задачей, т. е. малые погрешности функций
R xy (τ ), R xx (t − τ ) приводят к сколь угодно большим ошибкам в
определении w(t). Отметим, что среднеквадратичное отклонение
весовой функции, найденной из уравнения (3.3.3), от
действительной весовой функции может быть незначительным,
но эта функция не имеет физического смысла. Поэтому интерес
представляют только гладкие решения уравнения (3.3.3). Чтобы
это показать, применим к уравнению Винера-Хопфа
преобразование Фурье, и получим следующее соотношение:
(3.3.4)
где S xy ( jω ) и S xx (ω ) - спектральные плотности сигналов на выходе
и входе соответственно; H ( jω ) - комплексная частотная
характеристика СИ. Отсюда следует, что
S xy ( jω ) = H ( jω ) S xx (ω ),
H ( jω ) =
S xy ( jω )
(3.3.5)
S xx (ω )
При конечной длине реализаций x(t) и y(t) спектральная
плотность S xx (ω ) для некоторых значений ω близка к нулю, и
малые изменения в значении S xx (ω ) из-за помех или
вычислительных ошибок приводят к сколь угодно большим
изменениям значения величины H ( jω ).
Для нахождения гладких решений уравнения Винера-Хопфа
используются методы регуляризации. Один из таких методов
состоит в использовании сглаживающих функций. Весовая
функция при этом определяется путем минимизации
функционала:
2
∞
⎡⎛
⎞ ⎤
F = E ⎢⎜ y (t ) − ∫ w(τ ) x(t − τ )dτ ⎟ ⎥ + α F1 ( w(t ))
⎢⎣⎝
0
⎠ ⎥⎦
(3.3.6)
где α - положительное число, E- математическое ожидание,
сглаживающий функционал вида:
t
F1 ( w(t )) = ∫ (k (τ ) w& 2 (τ ) + p(τ ) w2 (τ ))dτ ,
F1 -
(3.3.7)
0
где k (τ ) > 0 , p(τ ) > 0 , w& (τ ) =
dw(τ )
.
dτ
Условие минимума функционала
альтернативной форме:
∞
F
можно
⎧ d ⎛ ∂w ⎞
⎫
Rxy (τ ) = α ⎨ ⎜ k
⎟ + pw⎬ + ∫ Rxx (t − τ ) w(t )dt
⎩ dt ⎝ ∂τ ⎠
⎭ 0
w& (0) = w& (∞) = 0 .
записать
в
(3.3.8)
причем
Уравнение (3.3.8) отличается от уравнения Винера-Хопфа
(3.3.3)
дополнительным
слагаемым
в
правой
части,
обеспечивающим единственность и гладкость решения.
Другой способ нахождения весовой функции состоит в ее
аппроксимации рядом:
n
w(t ) = ∑ ciϕ i (t ),
i =0
(3.3.9)
где ϕ i (t ) - базисная система функций; ci - неизвестные параметры.
Подставляя (3.3.9) в первое слагаемое выражения (3.3.6),
получим:
2
∞
⎧⎪⎡
n
⎤ ⎫⎪
ε = E ⎨⎢ y (t ) − ∫ x(t − τ )∑ ciϕ i (τ )dτ ⎥ ⎬
i =0
0
⎪⎩⎣
⎦ ⎪⎭
2
Введем обозначения:
(3.3.10)
c = {c0 , c1 ,K, cn }
∞
z i (t ) = ∫ ϕ i (τ ) x(t − τ )dτ ,
(3.3.11)
0
Величины z i (t ) называют выходными реакциями фильтров с
весовыми функциями ϕ i (t ) на входной сигнал x(t ) . С учетом
обозначений (3.3.11) выражение (3.3.10) запишется в виде:
2
n
⎧⎪ ⎡
⎤ ⎫⎪
ε = E ⎨ ⎢ y (t ) − ∑ ci zi (t ) ⎥ ⎬ .
i =0
⎦ ⎭⎪
⎪⎩ ⎣
2
(3.3.12)
Компоненты вектора c, минимизирующие величину
находятся из (n+1) уравнений:
∂ε 2
= 0; j = 0,1,K , n.
∂c j
ε2,
(3.3.13)
Проводя дифференцирование, получим систему уравнений для
определения вектора c:
E {y (t ), z j (t )} = ∑ ci E {z j (t ) zi (t )} ; j = 0,1,K, n.
n
i =0
Величины E{y (t ), z j (t )} и
начальные
значения
ковариационных функций:
(3.3.14)
E{z j (t ), z i (t )}
представляют собой
соответствующих
взаимных
R yj = E{y (t ) z j (t )}
Rij = E {z i (t ) z j (t )}.
(3.3.15)
Из (3.3.15) следует, что Rij = R ji . С учетом (3.3.15) система
уравнений (3.3.14) запишется в виде:
n
R yj = ∑ сi Rij
i =0
; j = 0,1,K, n.
(3.3.16)
Левые
части
уравнений
(3.3.16)
рассчитываются
по
экспериментальным данным, поэтому на них сильно влияют
помехи на выходе СИ. Выразим
плотность:
1
Rij =
2π
∞
∫ H ( jω ) H
i
j
Rij
через спектральную
(− jω ) S xx (ω )dω ,
(3.3.17)
−∞
где H i ( jω ) - КЧХ фильтра с весовой функцией ϕ i (t ) ; S xx (ω ) спектральная плотность входного сигнала x(t ) . Достаточное
условие существования решения системы уравнений (3.3.17)
имеет вид:
⎧1 если i = j ,
Rij = ⎨
⎩0 если i ≠ j.
определения Rij (3.3.15) следует,
(3.3.18)
что для выходных сигналов
Из
фильтров базисной системы функций должны выполняться
условия
ортонормировки,
причем
по
(3.3.17)
ортонормированность может быть обеспечена лишь совместным
выбором H i ( jω ) и S xx (ω ) или соответственно ϕ i (t ) и x(t ) . Из
ортогональности функций ϕ i (t ) во временной области имеем:
∞
∫ ϕ (t )ϕ
i
0
j
⎧ A , если i = j
(t )dt = ⎨
⎩0 , если i ≠ j
(3.3.19а)
а в частотной области:
1
2π
∞
∫ H ( jω ) H
i
−∞
j
⎧ A , если i = j ,
(− jω )dω = ⎨
⎩ 0 , если i ≠ j.
(3.3.19б)
Сравнивая (3.3.19б) и (3.3.17) можно сделать вывод, что условие
(3.3.18) имеет место, если спектральная плотность входного
сигнала x(t) постоянна, т.е. если:
S xx (ω ) = S 0 = const (ω )
(3.3.20)
Это означает, что входным сигналом должен быть белый шум;
тогда матрица Rij является единичной при ортогональной системе
базисных функций. Корреляционная функция белого шума
представляет собой δ - функцию. Если ее подставить в уравнение
Винера-Хопфа вместо R xx (τ ) , то получим:
∞
Rxy (τ ) = ∫ w(t )δ (t − τ )dt = w(τ ) .
(3.3.21)
0
Поэтому из экспериментальных данных нужно определить
только R xy (τ ) . Таким образом, для решения задачи определения
w(t ) следует выбрать систему базисных функций. Этот выбор
зависит от вида передаточной функции. Для передаточной
функции вида (3.3.2): W ( p) =
B( p)
,
D( p)
r
где D( p) = ∏ ( p + p k ) n ;
k
k =1
r
∑n
k =1
k
=n
весовую функцию можно записать в следующей форме (см.
Приложение 3):
nk
r
w(t ) = ∑∑
k =1 j =1
Bkj
(nk − j )!
(3.3.22)
t n k − j exp( pk t ),
где
Bkj =
1 ⎡ d j −1
⎢
( j − 1)! ⎣ dp j −1
( p + pk ) n k B ( p ) ⎤
⎥
D( p)
⎦ p=− p
(3.3.23)
k
Сравнивая (3.3.23) с (3.3.9) можно заметить, что система функций
должна иметь следующий вид:
{ϕ i (t )} = {t n exp( pi t )}
(3.3.24)
Этому условию удовлетворяют функции Лагерра, которые во
временной области и через изображение по Лапласу
определяются следующим образом:
i
i!(−2α ) k
tk
2
k = 0 (i − k )! ( k! )
t
l i (t ) = 2α e −αt ∑
2α
Li ( p ) =
p +α
⎛ p −α ⎞
⎜⎜
⎟⎟
⎝ p +α ⎠
,
(3.3.25)
t
.
(3.3.26)
Таким образом, при определении динамических характеристик
СИ путем аппроксимации весовой функции линейной
комбинацией базисных функций, решение ищется из
соотношения (3.3.9), которое при использовании функций
Лагерра принимает вид:
n
w(t ) = ∑ ci l i (t )
(3.3.27)
i =0
Параметры ci определяются из решения системы уравнений
(3.3.16), матрица которой образована коэффициентами
корреляции сигналов на выходах фильтра Лагерра и сигнала на
выходе СИ. В качестве входного сигнала целесообразно
использовать белый шум.
После того как определена передаточная функция СИ, его
параметры могут быть найдены из условия минимума
динамической погрешности. Погрешность передаточной функции
СИ равна:
Δ W ( p) = W ( p) − W (0),
(3.3.28)
где W(p) – реальная передаточная функция; W(0) – идеальная
передаточная функция (в установившемся режиме).
При малых p (для медленных процессов) можно разложить
функцию ΔW ( p) в ряд Тейлора в окрестности p=0:
p
p2
Δ W ( p ) = W ′(0) + W ′′(0)
+ K,
1!
2!
(3.3.29)
где W ′ , W ′′ и т.д. – частные производные W(p) по p.
Для передаточной функции (3.3.2) производные равны:
W ′(0) =
b1 a 0 − b0 a1
a 02
;
2 (b2 a 02 − b0 a 0 a 2 − a 0 a1b1 + b0 a12 )
W ′′(0) =
a 03
(3.3.30)
и т.д.
Параметры a 0 , a1 , b1 , b2 , a 2 выражаются через параметры СИ.
Условие минимума динамической погрешности: ∂ΔW/∂p=0 Из
соотношения (3.3.29) следует, что Δ W ( p) = 0 , если одновременно
выполняются условия:
W ′(0) = 0
(3.3.31)
и т.д. Число уравнений в системе (3.3.31) равно числу
независимых параметров.
Решение системы уравнений (3.3.31) позволяет найти параметры
СИ, минимизирующие динамическую погрешность. Рассмотрим
примеры:
Пример 1. Пусть имеется система 1-го порядка, т.е.
описываемая дифференциальным уравнением 1-го порядка. Ее
переходная функция имеет вид:
W ′′(0) = 0
⎡
⎛ t − t0
h(t ) = K ⎢1 − exp⎜ −
T
⎝
⎣
⎞⎤
⎟⎥
⎠⎦
(3.3.32)
Весовая функция системы определяется как производная по
времени от переходной функции:
w(t ) =
K
⎛ t − t0 ⎞
exp⎜
⎟
T
⎝ T ⎠
(3.3.33)
Весовая функция связана с передаточной W(p) через обратное
преобразование Лапласа (см. Приложение 3):
σ + j∞
w(t ) =
1
W ( p )e pt dp
∫
2πj σ − j∞
(3.3.34а)
или
∞
W ( p ) = ∫ w(t ) e − pt dt ,
(3.3.34б)
0
где j = − 1 , σ = const .
Подставляя в (3.3.34б) выражение для w(t), найдем:
K
W ( p) =
,
1 + pT
(3.3.35)
т.е. в нашем примере b0 = K ; a 0 = 1 ; a1 = T .
Для W ′(0) из соотношения (3.3.30) получаем:
W ′(0) = − KT = 0 ,
т.е. T=0, и из (3.3.32) h(t ) = K = h(∞) . Таким образом, получаем
очевидный результат: для системы первого порядка
динамическая погрешность равна нулю в установившемся
режиме.
Пример 2. Рассмотрим систему 2-го порядка с переходной
функцией вида:
⎡
α
⎛
⎞⎤
h(t ) = K ⎢1 − e −αt ⎜ cos ω t + sin ω t ⎟⎥
ω
⎝
⎠⎦
⎣
(3.3.35)
Действуя аналогично предыдущему примеру, получим:
W ( p) =
b0
K (α 2 − ω 2 )
=
2
2
2
ω + α + 2 pα + p
a 0 + a1 p + p 2
,
(3.3.36)
где b0 = K (α 2 − ω 2 ); a 0 = α 2 + ω 2 ; a1 = 2α ; a 2 = 1.
Из соотношений (3.3.30) найдем:
W ′(0 ) =
− K (α 2 − ω 2 )2α
(ω
2 K (α
W ′′(0 ) =
=0 ,
2
+α2)
2
−ω2 α2 −ω2
2
(ω
)(
2
+α
)
2 3
)=0
.
(3.3.37)
Производные обращаются в нуль при α 2 = ω 2 , где α - показатель
затухания колебаний, ω - собственная частота демпфированных
колебаний: ω 2 = ω 02 − α 2 , что эквивалентно равенству: ω = ω 0 2
или α ω 0 = 1 2 , где ω 0 - собственная частота не демпфированных
колебаний, α ω 0 - степень успокоения. Этому случаю
соответствует нулевое значение максимальной ширины полосы
пропускания измерительной системы. Другое физически
осмысленное решение: α = ∞ , ω = 0 , и h(t ) = h(∞) = K , т.е. система
находится в установившемся режиме. Аналогично могут быть
изучены системы 3-го и 4-го порядков; для систем более высоких
порядков решения находятся приближенно численными
методами. Из приведенных примеров следует, что точные
решения, соответствующие ΔW = 0 , являются предельными и
представляют скорее теоретический интерес. На практике ищут
решения, соответствующие определенному заданному допуску на
значение динамической погрешности; при этом уравнение имеет
вид:
(3.3.38а)
ΔW ( p ) ≤ Δ
или
h(t ) − h0 ≤ Δ ,
(3.3.38б)
так как погрешность симметрично распределена относительно h0 ,
где h0 - значение функции в стационарном режиме.
Уравнение решается относительно безразмерных параметров,
характеризующих систему. Возможны различные постановки
задачи в зависимости от вида входного воздействия. При
ступенчатом
воздействии
определяют
минимальную
длительность переходного процесса; при гармоническом максимизируют ширину полосы пропускания измерительной
системы [6, 10].
Рассмотрим в виде примера задачу минимизации длительности
переходного процесса при заданном значении динамической
погрешности для системы 2-го порядка.
Пример 3. Имеется система 2-го порядка с вращательным
движением, т.е. описываемая дифференциальным уравнением 2го порядка. При ступенчатом воздействии ее полной
динамической характеристикой является переходная функция:
где α , ω собственная
⎡
α
⎛
⎞⎤
h(t ) = h0 ⎢1 − e −αt ⎜ cos ω t + sin ω t ⎟⎥
ω
⎝
⎠⎦
⎣
параметры системы: α - показатель
частота
ω = ω 02 − α 2 ; ω 0 =
C
J
демпфированных
(3.3.39)
затухания, ω K
колебаний; α = ;
2J
- собственная частота недемпфированных
колебаний; K, J и C – коэффициент демпфирования, момент
инерции и жесткость системы соответственно. Перепишем
(3.3.39) в безразмерном виде, обозначив τ = ω t ; ϕ =
на значение h0 (при t = ∞ ) :
h(t ) = 1 − e −ϕτ (cos τ + ϕ sin τ )
α
и разделив
ω
(3.3.40)
Динамическая погрешность Δ равна:
Δ = h(t ) − h0 = −e −ϕτ (cos τ + ϕ sin τ ) .
(3.3.41)
Требуется определить минимальное время τ переходного
процесса при заданном значении погрешности Δ . Так как Δ
может принимать и положительные, и отрицательные значения,
то имеем два уравнения для определения двух параметров
системы τ и ϕ .
Продифференцируем (3.3.41) по τ и приравняем нулю
производную, получим:
∂Δ
= −ϕ e −ϕτ (cosτ + ϕ sin τ ) + e −ϕτ (− sin τ + ϕ cosτ ) = 0
(3.3.42)
∂τ
Решая уравнение относительно τ , найдем:
sin τ = 0 ,
т.е. τ = 0 ± πn
(3.3.43)
Физически осмысленное решение τ = π . Подставляя это значение
в (3.3.41), имеем:
Δ = e −πϕ
(3.3.44а)
или
ln Δ 1 1
ϕ =−
= ln .
(3.3.44б)
π
π
Δ
Подставив это выражение для ϕ в (3.3.41), получим соотношение
между τ и Δ :
τ
ln Δ
⎛
⎞
Δπ ⎜ cos τ −
sin τ ⎟ = Δ
π
⎝
⎠
(3.3.45)
Выражения в правой и левой частях взяты по модулю. Задавая
значения динамической погрешности, можно определить
соответствующие значения длительности переходного процесса.
Решения находятся приближенно численными методами.
Результаты расчетов для наиболее характерных значений
погрешности представлены ниже, в таблице 1.
Таблица 1
τ
Значения
безразмерной
минимальной
длительности
переходного процесса для системы 2-го порядка при ступенчатом
воздействии.
Δ
0
0,01
0,025
0,05
0,1
0,25
ϕ
τ min
∞
∞
1,465
1,175
0,955
0,733
0,441
2,36
2,21
2,07
1,88
1,52
Переход к физическому времени очевиден: t =
τ
. В качестве еще
ω
одного примера рассмотрим задачу максимизации ширины
полосы пропускания в системе 2-го порядка.
Пример 4. Пусть входной сигнал является гармоническим,
тогда полной динамической характеристикой является
комплексная частотная характеристика (КЧХ), состоящая из
амплитудной
и
фазовой
составляющих.
Амплитудная
характеристика имеет вид:
M0
(3.3.46)
A(ν ) =
2
(C − Jν )
2
+ K 2ν 2 .
Вводя безразмерные параметры: γ = ν ω 0 - относительная частота
вынужденных колебаний и ϕ 0 = α ω 0 - степень успокоения, можно
выражение (3.3.46) привести к виду:
1
A0 =
(3.3.47)
2
(1 − γ )
2
+ 4ϕ 02γ 2 ,
где A0 - относительная амплитуда: A0= A(ν)/A(0).
Требуется определить оптимальные параметры
соответствующие заданной погрешности Δ .
Имеем систему неравенств:
γ
и
ϕ0 ,
(3.3.48)
Вводя обозначения x=γ , y=ϕ0 , представим (3.3.48) в виде:
1 − Δ ≤ A0 ≤ 1 + Δ
2
2
x 2 − 2 x + 4 xy + 1 − (1 − Δ ) −2 ≤ 0
x 2 − 2 x + 4 xy + 1 − (1 + Δ ) −2 ≥ 0
(3.3.49)
Проанализируем первое неравенство, рассматривая левую часть
как квадратичный полином относительно x. Полином не
положителен в промежутке между двумя корнями:
x1,2 = (1 − 2 y ) ± ((1 − 2 y ) 2 − 1 + (1 − Δ) −2 )1/ 2
(3.3.50)
Следовательно, подкоренное выражение должно быть не
отрицательно, что имеет место при любом y, так как подкоренное
выражение является суммой неотрицательных величин. Для y
получаем очевидное соотношение (при Δ=0)
y ≤ 1/ 2
(3.3.51)
Физический интерес представляет предельный случай, когда
y=ϕ02=1/2 и x=0.
Проанализируем второе из неравенств (3.3.49). Аналогично для
корней полинома можно записать
x1,2 = (1 − 2 y ) ± ((1 − 2 y ) 2 − 1 + (1 + Δ) −2 )1/ 2
(3.3.52)
Так как нас интересуют действительные корни, то подкоренное
выражение должно быть не отрицательно, что дает
y ≤ 1/ 2(1 − (1 − (1 + Δ) −2 )1/ 2 )
(3.3.53)
Отсюда находим предельное значение ϕ02
ϕ 02 = y = 1/ 2(1 − (1 − (1 + Δ) −2 )1/ 2 )
(3.3.54)
ϕ 0 = (1/ 2(1 − (1 − (1 + Δ)−2 )1/ 2 ))1/ 2
(3.3.55)
или
Подставляя полученное выражение для y=ϕ02 в соотношение
(3.3.50), имеем для x
x1,2 = 1 − (1 − (1 − (1 + Δ) −2 )1/ 2 ) ± ((1 − Δ) −2 − (1 + Δ) −2 )1/ 2
(3.3.56)
Из последнего выражения получаем физически осмысленное
решение для γ=x1/2:
(3.3.57)
γ max = ((1 − (1 + Δ)−2 )1/ 2 + ((1 − Δ)−2 − (1 + Δ)−2 )1/ 2 )1/ 2
Выражения (3.3.55) и (3.3.57) определяют оптимальные
(предельные) значения параметров γ , ϕ 0 , соответствующие
заданному значению динамической погрешности Δ . В табл. 2
приведены результаты расчетов γ и ϕ 0 при различных значениях
Δ.
Таблица 2
Максимальная ширина полосы пропускания для системы 2-го
порядка при гармоническом воздействии.
Δ
0
0,01
0,025
0,05
0,1
0,25
ϕ0
γ max
0,707
0,656
0,627
0,593
0,538
0,448
0
0,584
0,729
0,863
1.03
1,29
Переход к физической ширине полосы пропускания
осуществляется из соотношения ν max = γ max ω 0 .
Вопросы, изложенные в данной главе, рассмотрены в [5-10, 14,
21, 24, 29-32, 34, 39, 41, 42, 45, 46].
4. Повышение точности и помехоустойчивости СИ
4.1. Методы повышения точности СИ
Методы повышения точности СИ можно подразделить условно
на три группы: алгоритмические, технологические и
структурные.
Алгоритмические
методы
основаны
на
совершенствовании алгоритмов измерений и обработки
результатов и позволяют уменьшить методические погрешности.
Технологические методы используются при конструировании и
изготовлении СИ и позволяют уменьшить инструментальные
погрешности. Структурные методы позволяют уменьшить
инструментальные, а в ряде случаев и методические
погрешности. Рассмотрим подробно структурные методы,
применяемые при функционировании СИ.
Методы уменьшения статических погрешностей. Различают
две группы методов: основанные на постоянстве структуры СИ и
на изменении структуры СИ во времени.
Методы первой группы используют введение в измерительную
цепь вспомогательных каналов, содержащих корректирующие
звенья, осуществляющие снижение погрешностей за счет
снижения уровня возмущений, вносимых влияющими факторами,
или за счет уменьшения влияния погрешностей элементов СИ на
выходной сигнал. Снижение уровня возмущений, вызванных
влияющими факторами, достигается введением внешних
корректирующих звеньев (последовательных или параллельных),
а уменьшение влияния погрешностей элементов СИ
осуществляется внутренними корректирующими звеньями.
Рассмотрим последний случай.
Погрешность преобразования согласно результатам §1.3
имеет вид:
m
Δ = f p − f o = Δg ( x) = a0 + a1 x + Σak x k ,
k =2
1 ⎛ ∂ k Δg ⎞
⎛ ∂Δg ⎞
где a0 = Δg (0); a1 = ⎜
⎟
⎟ ; ak = ⎜
k ! ⎝ ∂x k ⎠0
⎝ ∂x ⎠0
(4.1.1)
Эффективность структурных методов можно оценить, например,
отношением математических ожиданий квадрата ошибки в
исходном СИ и в СИ с коррекцией:
M [Δ 2 ]
α=
(4.1.2)
M k [Δ 2 ]
или отношением соответствующих дисперсий.
Для уменьшения аддитивной составляющей погрешности
часто используют последовательные корректирующие звенья.
Пусть элемент СИ имеет характеристику y = f 1 x и погрешность,
приведенную к входу Δ1 = а01,
соответствующий
преобразованию,
где f 1 причем
оператор,
функцию
преобразования f можно изменять.
Пусть в измерительную цепь включено последовательно
вспомогательное корректирующее звено с функцией f 2 и
погрешностью Δ2=а02 между входным сигналом х и исходным
СИ (см. рис. 13,а). Для случая линейных элементов, т.е.
постоянных функций преобразования сигнал на выходе имеет
вид
y = f 1 f 2 x + f 1 f 2 a02 + f 1 a01 .
(4.1.3)
За счет уменьшения f 1 можно снизить составляющую f 1 a01 ,
т.е. аддитивную погрешность выходного сигнала; при этом а02
должна быть пренебрежимо мала.
Для
уменьшения
мультипликативной
составляющей
погрешности широко используется параллельная коррекция с
обратной связью (см. рис. 13,д). Пусть элемент СИ имеет
функцию преобразования f 1 и погрешность, приведенную ко
входу Δ1 = а01 + а11 х1 . Корректирующее звено подключено
f2
и
параллельно и имеет функцию преобразования
погрешность
Δ2(y) = а02 + а12 y. Тогда на выходе СИ с
коррекцией имеем следующие соотношения (при отрицательной
обратной связи)
y = f 1[ x1 + Δ1 ( x1 )] ,
x1 = x − y2 ,
y2 = f 2 [ y + Δ 2 ( y )] ,
Δ1 ( x1 ) = a01 + a11 x1 ,
Δ 2 ( y ) = a02 + a12 y .
(4.1.4)
Решая систему уравнений (4.1.4) относительно y, получим
y=
f1 (1 + a11 ) x + f1a01 − f1 f 2 a02 (1 + a11 )
1 + f1 f 2 (1 + a11 )(1 + a12 )
(4.1.5)
Номинальное значение выходного сигнала СИ с коррекцией
равно (элементы считаются линейными)
yн =
f1 x
(4.1.6)
1 + f 1 f2
Погрешность выходного сигнала СИ с коррекцией равна (в
линейном приближении по x)
Δ y = y − yн =
f1a01 − f1 f 2 a02 (1 + a11 )
+
1 + f1 f 2 (1 + a11 )(1 + a12 )
⎡
(1 + a11 )
1 ⎤
+ f1 x ⎢
−
⎥.
+
+
+
+
f
f
a
a
f
f
1
(1
)(1
)
1
⎣
1 2
11
12
1 2 ⎦
(4.1.7)
Соотношение (4.1.7) можно упростить; оставляя только члены,
линейные по погрешностям, получим
Δy =
⎡
f1a01 − f1 f 2 a02
1 + a11
1 ⎤
+ f1 x ⎢
−
⎥
1 + f1 f 2 (1 + a11 + a12 )
⎣1 + f1 f 2 (1 + a11 + a12 ) 1 + f1 f 2 ⎦
(4.1.7а)
В последнем случае выражение для погрешности при
условии, что f1 f2 >> 1 и а11 << 1, а12 << 1, принимает вид
Δ y ( x) =
a01
a x a x
− a02 − 12 + 11 2 ,
f2
f2
f1 f 2
(4.1.7б)
т.е. мультипликативная погрешность а11х может быть
существенно снижена.
Из вида соотношения (4.1.7) следует, что мультипликативная
f1 f2 → ∞, причем аддитивная и
погрешность а11х мала при
мультипликативная погрешности корректирующего звена а02,
а12х должны быть пренебрежимо малы. Аддитивная
составляющая а01 при таком способе коррекции остается
существенной. Для ее уменьшения используют прием,
рассмотренный выше, а именно, вводят последовательное
корректирующее звено перед элементом СИ, так что обратная
связь охватывает оба элемента (основной и корректирующий). В
этом случае имеем следующие соотношения:
y = f1 [x1 + Δ1 ( x1 )]
x1 = f 3 [x 3 + Δ 3 ( x )]
x3 = x - y2
y 2 = f 2 [y + Δ 2 ( y )]
Δ1 ( x1 ) = a01 + a11 x1
Δ 3 ( x3 ) = a03 + a13 x3
Δ 2 ( y ) = a02 + a12 y .
(4.1.8)
Решая уравнения (4.1.8) совместно получим для выходного
сигнала с точностью до линейных по x членов следующее
выражение
y=
A + Bx
,
C
(4.1.9)
где А, В, С определяются соотношениями
A = f1a01 + f1 f 3 a03 (1 + a11 ) − f1 f 3 f 2 a02 (1 + a13 )(1 + a11 ) ,
B = f1 f 3 (1 + a11 )(1 + a13 ) ,
C = 1 + f1 f 3 f 2 (1 + a12 )(1 + a11 )(1 + a13 )
(4.1.10)
Номинальное значение сигнала на выходе равно (см. §3.1)
yн =
f1 f 3 x
1 + f1 f 3 f 2
(4.1.11)
Погрешность выходного сигнала для СИ с коррекцией с
точностью до членов, линейных по x, определяется выражением
f1 f 3 x
A + Bx
(4.1.12)
−
C
1 + f1 f 3 f 2
Рассмотрим различные упрощения соотношения (4.1.12). В
реальной ситуации значения погрешностей ∆1, ∆2, ∆3, а
следовательно и параметров а0i, а1i малы, т.е. а0i << 1, а1i << 1
(i = 1,2,3). Оставляя только линейные по а0i, а1i члены, получим
Δ y = y − yн =
Δy =
f1a01 + f1 f 3 a03 − f1 f 3 f 2 a02
+ f1 f 3 x ⋅
1 + f1 f 3 f 2 (1 + a11 + a12 + a13 )
⎛
⎞
1 + a11 + a13
1
⋅⎜
−
⎟.
+
+
+
+
+
f
f
f
a
a
a
f
f
f
1
(1
)
1
1 3 2
11
12
13
1 3 2 ⎠
⎝
С целью дальнейшего упрощения положим
дает
Δy =
−
(4.1.12 а)
f1 f 2 f 3
>> 1, что
a01
a03
+
−
f 3 f 2 (1 + a11 + a12 + a13 ) f 2 (1 + a11 + a12 + a13 )
a02
f f x(a + a13 − f1 f3 f 2 a12 )
+ 12 3 2 112
.
1 + a11 + a12 + a13 f1 f3 f 2 (1 + a11 + a12 + a13 )
(4.1.12 б)
Далее можно пренебречь величинами a11 , a12 , a13 в знаменателе,
так как вклад от них следующего по погрешности порядка
малости, что дает
Δy =
a01 a03
(a + a ) x a x
+
− a02 + 11 132 − 12 .
f3 f 2 f 2
f2
f1 f3 f 2
(4.1.12 в)
Из вида выражения (4.1.12в) следует, что при данном способе
коррекции уменьшается аддитивная погрешность исходного СИ в
f 3 f 2 раз, также оказывается уменьшенной мультипликативная
2
составляющая погрешности в f1 f 3 f 2 раз. В этой схеме коррекции
должны быть малыми аддитивная погрешность a02 , аддитивная
погрешность a03 , а также мультипликативные составляющие a12 x
и a13 x корректирующих звеньев.
Наряду с рассмотренными методами коррекции для повышения
точности СИ используют метод модуляции, который реализуется
двояким образом: посредством модуляции входного сигнала x(t )
либо посредством модуляции погрешности Δ(t ) , вследствие чего
появляется различие в спектрах частот сигнала x(t ) и
Δ(t ) .
Модуляция
сигнала
производится
погрешности
модулятором, устанавливаемым между источником сигнала и СИ
(в первой схеме) или между СИ и помехой (во второй схеме), а
также посредством периодического изменения параметров СИ
(например, коэффициента передачи). Исключение аддитивной
погрешности СИ осуществляется ее фильтрацией при
пропускании сигнала через фильтр верхних частот, с его
последующей демодуляцией и применением фильтра нижних
частот [4].
Еще один метод повышения точности СИ состоит в передаче
периодических эталонных сигналов. В этом методе на вход СИ
подаются периодические эталонные сигналы xэт (t ) , посредством
обработки выходных сигналов определяются мультипликативные
погрешности, а затем вводятся сигналы для компенсации
погрешностей.
В рассмотренных методах модуляции и подачи периодических
сигналов основная ошибка определения погрешности СИ
обусловлена изменением x(t ) во времени. Для повышения
точности определения Δ(t ) используется метод периодической
автоподстройки параметров. Рассмотрим этот метод в
квазистатическом режиме, когда допустимо измерение сигнала
x(t ) в дискретные моменты времени. Предположим, что функция
преобразования СИ, описывается в окрестности точки x кусочнолинейной моделью вида
y = a1i x + a0i ,
(4.1.13)
где a1i , a0i - случайные величины; i= 1,2,…,n.
Требуется определить значение измеряемой величины x. Для
решения этой задачи процесс измерения выполняется в три этапа.
На первом этапе на вход СИ подается сигнал x, на втором –
сумма сигнала x и эталонного (тестового) сигнала xэт , на третьем
входной сигнал, предварительно усиленный в известное число
раз К. В итоге получается система уравнений
⎧ y1 = a1i x + a0i ;
⎪
⎨ y2 = a1i ( x + xэт ) + a0i ;
⎪ y = a Kx + a ;
1i
0i
⎩ 3
(4.1.14)
Ее решением является значение величины x
x=
y3 − y1 xэт
⋅
,
y2 − y1 K − 1
(4.1.15)
причем значение xэт должно быть мало по сравнения с
диапазоном изменения величины x, а К – не сильно отличаться
от 1. Относительная ошибка определения x по (4.1.15) равна
δ х = δ y −y + δ y −y + δ x + δK ⋅
3
1
2
1
эт
K
K −1
.
(4.1.16)
Наибольший вклад в ошибку дает последнее слагаемое. Для
динамического режима автоподстройки изложенный метод имеет
ограниченную применимость, так как невозможно непрерывное
изменение x(t ) . СИ отключают на малую часть периода, что
вызывает появление составляющих динамической погрешности,
обусловленных прерыванием измерения x(t ) на время ΔТ и
переходными процессами при включении СИ для продолжения
измерения x(t ) .
4.2. Методы повышения помехоустойчивости СИ.
Динамические измерения. Повышение помехоустойчивости
СИ достигается в этом случае фильтрацией помех, которая
осуществляется с помощью линейных и нелинейных фильтров.
Наиболее известными линейными оптимальными фильтрами
являются фильтры Винера и Калмана.
Фильтр Винера. Пусть входной сигнал имеет вид суммы
полезного (измеряемого) сигнала и помехи:
z (t ) = x (t ) + Δ (t ) .
(4.2.1)
Предполагается, что величины x (t) и Δ (t) являются случайными
стационарными
функциями
времени
с
известными
характеристиками. Измерения проводятся на большом интервале
времени [ −∞, t ] . Входной процесс z(t) предполагается
центрированным, т.е. его математическое ожидание равно нулю.
Выходной сигнал СИ с фильтром определяется выражением:
y (t ) =
t
t
−∞
−∞
∫ h ( t − τ ) z (τ ) dτ = ∫ h ( t − τ ) ( x (τ ) + Δ (τ ) ) dτ , (4.2.2)
где h(t-τ) - весовая функция искомого фильтра.
Погрешность фильтрации является также
процессом и определяется в виде:
e(t ) = y ( t ) − y0 ( t )
случайным
(4.2.3)
где y0(t)- идеальный выходной сигнал:
y0 ( t ) =
t
∫ h ( t − τ ) x (τ ) dτ ,
(4.2.4)
0
−∞
где h0(t-τ) - весовая функция заданного фильтра.
Искомый
фильтр
характеризуется
минимальным
среднеквадратичным
риском,
определяемым
минимумом
дисперсии погрешности фильтрации:
D [ e] = M ⎡⎣( y (t ) − y0 (t )) 2 ⎤⎦ = min .
Выражение для D[e] имеет вид:
(4.2.5)
(
D [ e] = M [(W (t )) 2 ] − 2M [W (t ) ⋅W0 (t ) ] + M ⎡ W0 ( t ) ) 2 ⎤⎦ .
⎣
(4.2.6)
Подставляя в (4.2.6) значения y(t) из (4.2.2) и заменяя
произведение интегралов двойным интегрированием, получим:
D [ e] =
t
t
∫ ∫ h ( t − τ )h ( t − τ ) R (τ
1
zz
2
1
− τ 2 ) dτ1dτ 2 −
−∞ −∞
t
−2 ∫ h ( t − τ )Rzy0 ( t − τ ) dτ + D ⎣⎡ y0 ( t ) ⎦⎤
,
(4.2.7)
−∞
так как M ⎡⎣( y0 ( t ) )
2
⎤ = D ⎡ y (t )⎤ ,
⎣ 0 ⎦
⎦
где D[y0(t)] - дисперсия y0(t),
Rzz (τ ) -
ковариационная функция входного сигнала, Rzy (τ ) - взаимная
ковариационная функция входного и идеального сигнала.
Таким образом, отыскание оптимальной весовой функции
искомого фильтра h ( t − τ ) сводится к решению вариационной
задачи поиска минимума D[e]. Её решением является
интегральное уравнение Винера-Хопфа:
0
t
∫ h ( t − τ )R (τ − τ ) dτ
1
zz
1
1
= Rzy0 ( t − τ ) ; t > τ .
(4.2.8)
−∞
Физически осмысленное решение уравнения (4.2.8), как
отмечалось в §3.3, может быть получено, если известно
дифференциальное уравнение, связывающее входной сигнал z(t) с
белым шумом. Если спектральная функция входного сигнала
S zz (ω ) является дробно-рациональной и её можно представить в
виде двух сомножителей μ (ω ) ⋅ μ ∗ (ω ) , один из которых имеет
полюса в верхней полуплоскости, а второй (сопряженный) – в
нижней,
то
лапласовское
изображение
оптимальной
передаточной функции имеет вид:
h ( p) =
∞
1
1
− pt
e
dt
2π
μ ( p ) ∫0
∞
∫
−∞
S zy0 (ω )
μ (ω )
∗
e jωt dω ,
(4.2.9)
где S zy (ω ) - взаимная спектральная плотность входного и
идеального выходного сигналов.
В задаче фильтрации можно принять, что h0 ( t − τ ) = δ ( t − τ ) , а
полезный сигнал и помеха независимы, тогда (4.2.9) принимает
вид:
0
∞
1
1
h( p) =
e − pt dt
∫
2π
μ ( p) 0
∞
∫ μ (ω )e
jω t
dω .
(4.2.10)
−∞
Минимум
дисперсии
погрешности
фильтрации,
соответствующий оптимальной весовой функции, равен:
Dmin ⎡⎣e ( t ) ⎤⎦ = D ⎡⎣ y0 ( t ) ⎤⎦ −
t
∫ h ( t − τ )R (τ ) dτ
zy0
.
(4.2.11)
−∞
Фильтр Калмана–Бюси. В фильтре Винера оптимальная
весовая функция получается решением интегрального уравнения,
что в реальных случаях оказывается затруднительным. Поэтому в
работе Калмана и Бюси была предложена процедура фильтрации,
основанная на решении дифференциальных уравнений с
заданными начальными условиями. При выводе уравнения
фильтра Калмана–Бюси предполагается, что входной (полезный)
сигнал x(t) генерируется уравнением:
•
x = A(t ) x + B (t ) q (t )
(4.2.12)
где q(t) –белый шум; А, В – матрицы.
Сигнал на выходе (результат измерения) удовлетворяет
уравнению:
•
z = C (t ) x + υ (t ) ,
(4.2.13)
где C(t) – матрица, а υ ( t ) – белый шум.
Задача формулируется в следующем виде: по заданному z(s),
t0<s<t построить оценку x€( t1 t ) случайной функции x(t1), вида:
t
x€( t1 t ) = ∫ A ( t1 , s )dz ( s ) ,
(4.2.14)
t0
минимизирующую дисперсию ошибки фильтрации:
2
D [ e ] = M ⎡⎣( x€( t1 t ) − x ( t1 ) ) ⎤ = min .
⎦
(4.2.15)
Как и ранее, предполагается, что процессы x(t), q(t),υ(t) взаимно
независимы и центрированы, а шумы имеют корреляционные
функции вида:
M ⎡⎣ q ( t ) q (τ ) ⎤⎦ = Q ( t ) δ ( t − τ )
M ⎡⎣υ ( t )υ (τ ) ⎤⎦ = R ( t ) δ ( t − τ )
,
(4.2.16)
где Q(t), R(t) – соответствующие ковариационные матрицы,
δ ( t − τ ) – дельта-функция Дирака.
Необходимым и достаточным условием того, чтобы x€( t1 t )
было решением задачи фильтрации, является выполнение
уравнения Винера–Хопфа:
M ⎡⎣( x(t1 ) − x€(t1 t ) ) ( z (σ ) − z (τ ) ) ⎤⎦ = 0
(4.2.17)
для всех σ и τ, t0<τ<σ<t. Или что то же:
M ⎡⎣ x ( t1 ) ( z (σ ) − z (τ ) ) ⎤⎦ − M ⎡⎣ x€( t1 t ) ( z (σ ) − z (τ ) ) ⎤⎦ = 0 .
(4.2.17а)
При сделанных предположениях справедлива следующая
теорема. Пусть для задачи фильтрации существует решение вида:
t
x€( t t ) = ∫ h ( t , s )dz ( s ) ,
(4.2.18)
t0
где h(t, s) – весовая функция, непрерывно дифференцируемая по
t, тогда для t0<s<t справедливо соотношение:
•
h (t, s ) = A (t ) h (t, s ) − h (t, t ) C (t ) h (t, s ) .
(4.2.19)
Следствием теоремы (4.2.19) является дифференциальное
уравнение, которому должно удовлетворять оценка x€( t t ) :
dx€( t t )
dt
= A ( t ) x€( t t ) + K ( t ) [ z ( t ) − C ( t ) x€( t t )] ,
(4.2.20)
где K ( t ) ≡ h ( t , t ) = P ( t ) C ∗ ( t ) R −1 ( t ) ; P ( t ) = D [ x€(t )] – ковариационная
матрица, которая является решением уравнения типа Риккати:
•
P = A ( t ) P + PA∗ ( t ) − PC ∗ ( t ) R −1 ( t ) C ( t ) P + B ( t ) Q ( t ) B∗ ( t )
(4.2.21)
с начальными условиями P(t)=P0=D[x0].
Уравнение (4.2.20) определяет структуру оптимального
линейного фильтра. Практическая реализация фильтров Винера и
Калмана связана с рядом технических трудностей, поэтому на
практике применяются фильтры на основе RC-цепочек и
операционных усилителей, являющиеся субоптимальными,
однако более легко реализуемыми. Фильтры Калмана получили
распространение
при
фильтрации
дискретных
последовательностей. Рассмотрим примеры использования
линейных фильтров.
Пример 1. Определим одномерный фильтр с полосой
пропускания 2Δ, центрированной на частоте f0. Его частотная
характеристика имеет вид:
⎧1
H ( f ) = ⎨0
⎩
П
для
f ± f 0 ≤Δ
в противном случае .
(4.2.22)
Такой фильтр называется полосовым. Обычно Δ считается малой
величиной. Если f0 =0, то фильтр называется низкочастотным.
Если на вход такого фильтра подается сигнал в виде ряда:
n
x ( t ) = ∑ ai cos ( 2π fi + θ i ) ,
(4.2.23)
i =1
то на выходе получается ряд:
y ( t ) = ∑ ai cos ( 2π fi + θ i ) ,
fi ± f 0 ≤ Δ
(4.2.24)
где суммирование ведется по всем i, удовлетворяющим
неравенству fi ± f 0 ≤ Δ . Таким образом, составляющие x(t),
частоты которых близки к f0, остаются без изменений, а другие
составляющие при фильтрации устраняются.
Пример 2. Второй важный для приложений фильтр
определятся преобразованием Гильберта. Его частотная функция
имеет вид:
⎧⎪ −i
H (f )=⎨ 0
⎪⎩ i
Г
при f >0
при f =0 .
при f <0
(4.2.25)
Если на вход такого фильтра подается сигнал x(t), определяемый
выражением (4.2.23), то на выходе получается сигнал:
n
y ( t ) = ∑ ai sin ( 2π fi t + θ i ) ,
(4.2.26)
i =1
т.е. применение такого фильтра сдвигает входной сигнал по фазе
на π/2. Отметим интересную связь преобразования Гильберта со
свойством осуществимости линейной системы с постоянными
параметрами. Линейная система физически осуществима тогда и
только тогда, когда HI(f) есть преобразование Гильберта HR(f), т.е.
HI(f)=HГHR(f), где HI , HR – мнимая и действительная части
частотной характеристики системы H(f): H(f)=HR(f)-jHI(f),
определяемые из соотношений:
∞
H R ( f ) = ∫ h (τ ) cos 2π f τ dτ
0
∞
H I ( f ) = ∫ h (τ ) sin 2π f τ dτ .
(4.2.27)
0
Пример 3. Пусть сигнал на входе x(t) состоит из полезного
сигнала y(t) и шума n(t), причем y(t) и n(t) – независимые
стационарные процессы. Мы хотим аппроксимировать y(t)
процессом, полученным фильтрацией x(t). Матрица спектральной
плотности x(t) и y(t) имеет вид:
S yy ( f ) + Snn ( f ) S yy ( f )
S yy ( f )
S yy ( f ) .
(4.2.28)
Наилучший
линейный
фильтр,
предназначенный
определения y(t) по x(t), имеет частотную характеристику:
H ( f ) = S yy ( f ) ( S yy ( f ) + Snn ( f ) ) .
−1
для
(4.2.29)
Функция H(f) называется избирательным фильтром для сигнала
y(t), присутствующего в шуме n(t). Как видно, из выражения
(4.2.29), его действие состоит в том, что частотные компоненты
сигнала x(t) из интервала частот, где значение Snn(f) велико по
сравнению с Syy(f), этим фильтром не пропускаются, а
компоненты x(t) из интервала частот, где Snn(f) мало по
сравнению с Syy(f), пропускаются почти без изменений. Величина
Syy(f)/ Snn(f) называется отношением сигнала к шуму на частоте f.
Пример 4. Измерение сигнала x(t) проводится двумя
приборами с передаточными функциями W1(p), W2(p). Сигналы на
выходе этих приборов соответственно равны:
y1 ( p) = W1 ( p) x( p) + Δ1 ( p) ,
y2 ( p) = W2 ( p) x( p) + Δ 2 ( p) ,
(4.2.30)
где Δ1(p), Δ2(p) – лапласовское изображение шумов на выходе
приборов СИ1 и СИ2 соответственно. Приборы имеют разные
динамические характеристики и разные спектры собственных
шумов. Требуется повысить динамическую точность и провести
фильтрацию шумов.
Для решения этой задачи используем два избирательных
фильтра с передаточными функциями W1u(p) и W2и(p). Первый
фильтр включен на выходе прибора СИ1, а второй – на выходе
СИ2.
Суммарный сигнал на выходе СИ1+СИ2 равен:
y ( p ) = W ( p ) x( p) + W1и ( p)Δ1 ( p) + W2и ( p)Δ 2 ( p ) .
(4.2.31)
Передаточная функция всего устройства:
W ( p) = W1( p)W1u ( p) + W2 ( p)W2u ( p) .
(4.2.32)
Выберем:
W1( p)W1u ( p) = 1 − W2 ( p)W2u ( p) + ε ,
(4.2.33)
где ε – малая величина. При ε=0: W(p)=1, т.е. на выходе получаем
неискаженный сигнал, характеризуемый высокой точностью и
эффективной фильтрацией шумов.
Статические измерения. В статическом случае для
повышения помехоустойчивости СИ применяются специальные
алгоритмы обработки многократных измерений. Задача
формулируется в следующем виде. Найти оценку x€ полезного
сигнала x=const по результатам многократных измерений zi=
xi+Δi (i=1,2,…,n), включающих значениях помех Δi, которые
являются
реализациями
случайной
величины
Δ(t).
Соответствующая
оценка
должна
быть
эффективной,
состоятельной и несмещенной в заданном диапазоне измерений.
Можно показать после несложных преобразований, что
оптимальный алгоритм, удовлетворяющий сформулированным
условиям, определяется выражением:
f ( z1 ,..., zn ) = ∫
tp(t ) p( z1 + t ).... p( zn + t )dt
∫ p(t ) p( z1 + t ).... p( zn + t )dt
,
(4.2.34)
где p(t)·…·p(zn+t)=p(t, z1, ..., zn) – совместная плотность
распределения z0, z1,…,zn. Искомая оценка равна:
x€ = z0 − f ( z1 − z0 ,..., zn − z0 ) .
(4.2.35)
Рассмотрим примеры применения алгоритма (4.2.34) для
различных законов распределения помехи Δ.
Пример 5. Пусть помеха Δ(t) имеет нормальное
рапределение вида:
1
t2
p(t ) =
exp(− 2 ) .
2σ
σ 2π
(4.2.36)
Подставляя (4.2.36) в (4.2.34) и проводя вычисления, найдем:
1 n
f ( z1 ,..., zn ) = −
∑ zk .
n + 1 k =1
(4.2.37)
Для оптимальной оценки из (4.2.35) получим:
x€ =
1 n
∑ zk ,
n + 1 k =0
(4.2.38)
т.е. имеем выборочное среднее с дисперсией погрешности
оценки:
D [ x − x€] =
σ2
n +1
,
(4.2.39)
где σ2 – дисперсия помехи Δ.
Пример 6. Пусть помеха равномерно распределена в
интервале [-α, α] с дисперсией D[Δ]=α2/3. Требуется найти
оптимальную оценку.
Можно показать, что в этом случае оптимальная оценка
определяется центральным размахом:
x€ = Rц =
zmax + zmin
2
(4.2.40)
с дисперсией погрешности оценки:
D [ x − x€] =
2α 2
.
(n + 2)(n + 3)
(4.2.41)
Отметим, что если в данном примере использовать оценку в
виде выборочного среднего, то дисперсия погрешности оценки
возрастет, и оказывается равной D[Δ]=α2/3(n+1).
Сравним эффективность полученных оценок по объему
выборки (числу измерений), необходимому для обеспечения
заданной дисперсии погрешности оценки D0.
Для среднего выборочного необходимое число измерений
равно:
1 α2
ncp + 1 ≥
.
(4.2.42)
3 D0
Для центрального размаха:
nц2 ≥ 2α 2 / D0 .
(4.2.43)
Сравнивая ncp и nц, получаем соотношение для минимальных
объемов выборки двух оценок
nц ≅ 6ncp .
(4.2.44)
Таким образом, оценка по центральному размаху
оказывается эффективнее, чем по среднему выборочному,
особенно, когда требуется обеспечить высокую точность
результата измерения, т.е. при больших объёмах выборки.
Например, если пср=100, то пц= 6 ⋅102 ≅ 25 , т.е. в четыре раза
меньше.
Рассмотрим задачу нахождения оптимальной оценки в более
сложном случае, когда плотность распределения помехи имеет
вид:
⎛ z2 ⎞
(1 − ε )
p( z, ε ) =
exp ⎜⎜ − 2 ⎟⎟ + ε h( z ) ,
(4.2.45)
2
σ
σ 2π
⎝
⎠
где ε – малая величина; первое слагаемое описывает
флюктуирующую помеху с малой дисперсией; а второе –
импульсную с дисперсией σ 22 >> σ 2 и распределением, отличным
от нормального. В этом случае удается получить
квазиоптимальную оценку с точностью до членов, линейных по ε:
n
⎡
nak2 ⎤
1 n
2π
(4.2.46)
x€ =
zk − εσ
ak q0 (ak )exp ⎢ 2
⎥ ,
n + 1 k∑
n(n + 1) k∑
⎢⎣ 2σ (n + 1) ⎥⎦
=0
=0
где
ak =
1 n
1
zk − z j = z k − ∑ z j ;
∑
n j =0
n j ≠k
q0 ( z ) = h( z ) −
(
)
1
z2
дp( z, ε )
exp(− 2 ) =
дε
2σ
σ 2π
ε =0
.
Из (4.2.46) следует, что искомая оценка содержит поправку к
выборочному среднему, которая нелинейно зависит от
результатов измерений.
Если модель помехи имеет вид
p ( z , ε ) = (1 − ε )δ ( z ) + εγ ( z ) ,
(4.2.47)
т.е. часть результатов измерений не искажена; δ(z) – дельта
функция, γ ( z ) – плотность нормального распределения N (0,σ 2 ) ,
то удается получить оптимальную оценку:
n
nl 2k
l k exp(− 2 )
∑
2σ 2
k =1
x€ = z +
,
(4.2.48)
n
nl2k
ε n + ∑ exp(− 2 )
2σ 2
k =1
1 n
z=
z ; l = zk − z ;
n k =1 k k
∑
где
ε n = ε ((1 − ε ) n ) .
Аналитическое выражение для дисперсии погрешности
оценки по выражениям (4.2.46) и (4.2.48) получить не удается,
поэтому зависимость дисперсии от параметров ε, σ2 и объёма
выборки исследуется путем моделирования на ЭВМ. Расчеты
показывают, что применение алгоритма (4.2.48) позволяет
снизить дисперсию погрешности оценки в несколько раз при
значениях ε=0,1…0,3, т.е. при высоком уровне помех.
Задача ещё более усложняется, если не известен закон
распределения помехи. В этом случае наиболее часто
используется метод наименьших модулей, в котором
минимизируется величина:
n
∑z
k =1
k
− x€ ⇒ min .
(4.2.49)
Решением уравнения (4.2.49) является оценка по медиане:
x€ = med( z1 ,...., zn ) .
(4.2.50)
Другим подходом, получившим распространение, является
α-усеченное среднее, когда с обоих концов выборки удаляют по
m результатов измерений, а по оставшейся части выборки
вычисляется среднее.
Из этих двух методов оценка по медиане очень «жесткая»,
так как выбрасываются все результаты измерений, кроме одного
или двух центральных. Оценка по усеченному среднему менее
жесткая, кроме того, она уменьшает влияние флюктуирующих
помех.
4.3. Статистические методы оценки надежности СИ
Повышение точности и помехоустойчивости СИ тесно связано с
надежностью работы измерительной аппаратуры. В этом разделе речь
пойдет о метрологической надежности, т.е. о выходе параметров за
допустимые
пределы
с
заданной
вероятностью
(достоверностью).Наибольший
практический
интерес
имеют
следующие задачи:
- оценка вероятности безотказной работы СИ либо
вероятности отказа с учетом износа;
- оценка вероятности брака контроля при поверке СИ;
- определение «склонности» СИ к отказам с учетом ряда
факторов (например, условий эксплуатации);
- оценка вероятности отказов СИ за счет экстремальных
факторов.
Для решения перечисленных задач применимы несколько
статистических распределений (см. Приложение 4). Для оценки
вероятности
безотказной
работы
наиболее
подходят
распределение Вейбулла и отрицательное экспоненциальное
распределение. При оценке брака контроля также могут быть
использованы эти распределения. Склонность к отказам
оценивается по отрицательному биномиальному распределению.
Наконец, оценка отказов СИ за счет экстремальных факторов
проводится с использованием распределения Пуассона.
Оценка вероятности безотказной работы аппаратуры.
Прогнозирование вероятности безотказной работы СИ
проводится при нескольких предположениях. Отказы СИ и
аппаратуры контроля могут происходить по следующим
причинам: технологический брак, условия эксплуатации,
старение и износ, экстремальные факторы (грубые ошибки,
случайный сбой в работе по внешним причинам, аварийные
ситуации и т.д.). Вероятность отказов отдельных элементов СИ
принимается одинаковой; аналогичное допущение имеет место и
для
элементов
контрольно-измерительной
аппаратуры.
Определение вероятности
отказов
СИ
проводится
с
использованием
двух
распределений:
отрицательного
экспоненциального и распределения Вейбулла. Последнее
распределение имеет более общий характер и позволяет учесть
процессы износа элементов СИ. Вероятность отказов по
отрицательному
экспоненциальному
распределению
определяется интегральной функцией распределения:
P0 = F ( x) = 1− exp(−λ x) ,
(4.3.1)
Вероятность безотказной работы, следовательно, равна:
Pб = 1− P0 = exp(−λ x) ,
(4.3.2)
Результаты расчетов приведены в табл. 3. Расчет проводился для
практически важных значений параметра λ и аргумента х.
Таблица 3
Вероятность
отказов
СИ
(расчет
экспоненциальному распределению)
отрицательному
λ
x,
год
2
3
4
5
по
0,01
0,02
0,03
0,04
0,08
0,1
0,2
0,3
0,02
0,04
0,06
0,08
0,15
0,18
0,33
0,46
0,03
0,06
0,09
0,11
0,22
0,26
0,41
0,56
0,04
0,08
0,11
0,15
0,27
0,33
0,55
0,70
0,05
0,10
0,14
0,18
0,33
0,39
0,63
0,78
Интервал времени при расчетах выбран в пределах 2…5 лет, что
соответствует межповерочному интервалу для СИ, применяемых
в различных областях (механика, акустика, теплофизические
измерения).
При исследовании распределения Вейбулла соотношение для
вероятности отказов имеет вид:
P0 = 1− exp(−(( x − a)/ b)c ) ,
(4.3.3)
и вероятность безотказной работы в течение времени х
составляет:
Pб = exp(−(( x − a)/ b)c ) ,
(4.3.4)
где a, b, c – параметры распределения. При расчетах полагалось
a=0, b>1, c>1, что соответствует реальным условиям
эксплуатации СИ. Результаты расчетов приведены в табл.4.
Таблица 4
Вероятность отказов СИ (расчет по распределению Вейбулла)
х , год
2
3
4
5
2
3
4
5
2
3
4
5
b
c
1,2
1,5
2
5
7
2
0,6
0,8
0,89
0,95
0,6
0,84
0,94
0,98
0,6
0,84
0,94
0,98
0,6
0,99
1
1
0,6
1
1
1
5
0,28
0,41
0,53
0,6
0,22
0,37
0,51
0,6
0,14
0,30
0,46
0,6
0,01
0,07
0,28
0,6
0
0,03
0,2
0,6
7
0,18
0,29
0,39
0,48
0,15
0,22
0,37
0,39
0,06
0,15
0,27
0,3
0
0,01
0,08
0,27
0
0
0,02
0,16
Отметим, что распределение Вейбулла можно рассматривать
как отрицательное экспоненциальное, в котором параметр λ
зависит от х (учет износа), причем λ= хc-1/bc. С использованием
данных табл.3 оценим вероятность отказов для двух типов СИ,
работающих в разных режимах: циклически и непрерывно
(например, в системах управления, следящих системах). Для
циклических СИ параметр λ изменяется в пределах
λц=0,006…0,03, а для непрерывных – в пределах λн=0,02…0,1 (в
зависимости от условий эксплуатации). Расчеты дают значение
вероятности отказов: для циклических СИ – P0ц = 0,03…0,14; для
непрерывных – P0н = 0,1…0,39 (расчеты проведены для значения
х=5 лет, то есть межповерочный интервал принят равным 5 лет.
Как видно из расчетов, вероятность отказов у циклических СИ
существенно ниже (примерно в 3 раза), чем у непрерывных.
Расчеты по распределению Вейбулла выполняются аналогично и
дают такую же закономерность.
Представляет интерес и обратная задача – оценка параметров
распределения, связанных с характеристиками СИ, при которых
вероятность отказов не превышает некоторого заданного
значения. Положим, что вероятность отказов не должна
превышать P0=0,1…0,01, что соответствуют вероятности
безотказной работы Pб=0,90…0,99. Из табл. 3 имеем, что для
х=5лет при P0=0,1 – λ=0,02, что соответствует для распределения
Вейбулла значению хc-1/bc=0,02, которое обеспечивается,
например, при х=4, b=7, c=5. Для х=5лет при P0=0,05 – λ= 0,01,
что соответствует для распределения Вейбулла значению
хc-1/bc=0,01, которое достигается, например, при х=2, b=7, c=2.
Для х=2 года при P0=0,02 (Pб=0,98) – λ=0,01, что соответствует
значению хc-1/bc=0,01, которое достигается, например, при х = 4,
b=7, c=7. Параметры распределения могут быть определены по
результатам испытаний, что позволяет оценить доверительную
вероятность и необходимый межповерочный интервал. Если же
заданы доверительная вероятность и межповерочный интервал,
то можно определить параметры распределения и по ним оценить
необходимые характеристики данного типа СИ при
конструировании.
Оценка брака контроля. При вероятностном подходе к оценке
брака контроля следует учитывать четыре исхода:
Р1 =Р11P12 – вероятность не обнаружения дефекта на годном
элементе;
Р2 =Р21Р22 – вероятность обнаружения дефекта на негодном
элементе;
Р3 = Р31Р32 – вероятность обнаружения дефекта на годном
элементе;
Р4 =Р41Р42 - вероятность не обнаружения дефекта на негодном
элементе,
где первые множители характеризуют соответствующие
вероятности для СИ, а вторые – для аппаратуры контроля. Для
вероятности брака контроля имеем следующее соотношение:
(4.3.5)
Pбр = PΔ − P1(n) + P4(n) ,
где n – порядковый номер контроля (поверки); Р∆ - вероятность
того, что параметры СИ находятся в заданных пределах; Р1
=Р11P12, Р4 =Р41Р42. Положим для простоты, что n=1. Вероятность
Р∆ зависит от типа СИ:
Δ
PΔ = 2∫ f ( y)dy ,
(4.3.6)
0
где f (y) – плотность распределения параметров. В общем случае
f(y) является многомерным распределением, однако если выбрать
основной параметр, то распределение сводится одномерному. В
качестве основного (технологического) параметра для СИ обычно
используется характеристика инструментальной погрешности
(дисперсия, доверительный интервал и т.п.). Для определения Р∆
можно
использовать
нормальное
распределение.
Для
идентификации параметров распределения необходим большой
объем выборки по испытаниям СИ данного типа, что является
трудоемкой задачей. Поэтому примем для расчета Р∆ более
простую модель. Обозначим pi – вероятность
выхода за
допустимые пределы выбранного параметра для элемента i схемы
СИ. Примем для простоты pi =p=const(i). Тогда, вероятность того,
что для всей схемы параметр не выйдет за допустимые пределы,
равна:
PΔ = (1− p) No ,
(4.3.7)
элементов схемы СИ. Положим для
где N0 – число
определенности N0=10, тогда Р∆=0 при p=1; Р∆=0,95 при p= 0,005;
Р∆=0,90 при p=0,01; Р∆=0,82 при p=0,02; Р∆=1 при p=0. Мы
рассматриваем последовательную схему; для параллельной
схемы PΔ = 1− p No . Оценим вероятность брака контроля из
соотношения (4.3.5). Рассмотрим ряд предельных случаев. Пусть
вероятность выхода параметра за допустимые пределы равна
нулю, т.е. p=0, тогда Р∆=1. Кроме того, положим, что контрольноизмерительная аппаратура не содержит отказов. Тогда P12=1; P42
= 0 и соотношение (4.3.5) упрощается:
Pбр = 1− P11 •1 + P41 • 0 ,
(4.3.8)
где Р11, Р41 − вероятность безотказной работы и отказов СИ
соответственно. Используем для расчетов в целях упрощения
экспоненциальное распределение (для распределения Вейбулла
расчеты проводятся аналогично). Для циклических СИ имеем
λц=0,006…0,03 и Pбр = 0,03…0,14 (при λа = 0, т.е. для идеальной
аппаратуры). Для непрерывных СИ расчеты дают: λн = 0,02…0,1
и Pбр=0,1…0,39 (при λа = 0).
Если учесть конечную вероятность технологического брака, то
есть р≠0, то в (4.3.5) Р∆≠1, и так как Р∆<1, то с возрастанием
технологического брака вероятность брака контроля снижается.
При больших значениях вероятности технологического брака
вообще нет смысла говорить о браке контроля, так как эта
величина более низкого порядка малости по сравнению с
технологическим браком. Учтем отказы аппаратуры контроля.
Для циклических СИ имеем (при р=0; Р∆=1 и λц=0,006…0,03):
Pбр = 0,03…0,14 (λа = 0); Pбр= 0,17…0,28 (λа= 0,03); Pбр=0,37…0,53
(λа = 0,4), где λа − интенсивность отказов аппаратуры.
Для непрерывных СИ (при р=0; Р∆=1 и λн=0,02÷0,1) расчеты
дают: Pбр=0,1…0,39 (λа=0); Pбр=0,24…0,53 (λа=0,03); Pбр=
0,46…0,72 (λа = 0,4). Расчеты проведены для периода х=5 лет
(интервал между двумя контролями). Малые значения
интенсивности отказов λа≤ 0,03 учитывают только случайную
составляющую ошибки контроля; большие значения λа ≥ 0,4 –
систематическую.
Таким образом, для циклических СИ вероятность брака
контроля значительно ниже, чем для непрерывных; особенно это
заметно при малых интенсивностях отказов контрольноизмерительной аппаратуры. С возрастанием интенсивности
отказов аппаратуры λа это расхождение относительно меньше.
Точность аппаратуры существенно влияет на значение
вероятности
брака
контроля,
особенно,
при
малом
технологическом браке и низкой интенсивности отказов.
Определение склонности СИ к отказам. На склонность СИ к
отказам влияют режим работы и внешние условия (например,
температура, влажность, давление и т. п.). Оценим склонность к
отказам для циклических и непрерывных СИ, имеющих
различный режим работы. Используем для этого отрицательное
биномиальное распределение. Предположим, что парк
циклических и непрерывных СИ одинаков и составляет n=100.
Будем считать успехом, если выбранный из циклических СИ
прибор откажет. Оценим вероятность того, что циклический СИ
откажет, когда в парке непрерывных СИ будет ровно r приборов.
В этом случае одному успеху предшествует (n−r) неудач.
Примем, что для циклических СИ вероятность успеха p=0,003, а
вероятность неудачи
q=0,997; для непрерывных СИ
соответствующие величины равны:
p=0,01, q=0,99. Для
циклических СИ искомая вероятность дается выражением:
(4.3.9)
Pц = Cnn−−rr p1q n−r
Проведем расчет при r=99. В этом случае n−r=1, поэтому
Pц=0,3·10-2. Аналогичный расчет для непрерывных СИ при r=99
дает Pн=10-2. Последняя вероятность соответствует случаю, что
выбранный непрерывный прибор откажет, когда в парке
циклических СИ будет ровно 99 приборов. Таким образом, расчет
показывает, что склонность к отказам для циклических СИ
значительно меньше, чем для непрерывных.
Оценка вероятности отказов СИ за счет экстремальных
факторов. В данном случае имеются в виду редкие события,
влияние которых можно оценить по распределению Пуассона.
Предположим, что редкое событие случается 1 раз в 5 лет. Тогда
параметр m=λt в распределении Пуассона m=1. Предположим,
что вероятность числа отказов СИ из-за редкого события также
подчиняется распределению Пуассона. Примем для циклических
СИ λц=0,0006, тогда mц=λцt=0,003 (за период 5 лет), а для
непрерывных СИ λн=0,002 и mн=λнt=0,01. Тогда суммарная
вероятность числа отказов, вызванных редкими событиями за 5
лет, определяется обобщенным распределением Пуассона. Для
циклических СИ она составляет: Pц=exp(-λt)·λt·exp(-λцt)·λцt=0,0011.
Для непрерывных СИ аналогичные расчеты дают Pн=0,0038, т.е.
она значительно больше, чем для циклических СИ.
Повышение надежности СИ осуществляется методами
структурной и алгоритмической избыточности. В первом случае
используются
схемы
с
дополнительными
параллельно
включенными элементами, во втором – специальные алгоритмы
фильтрации помех, например, усеченное среднее, медиана и
другие, рассмотренные в § 4.2.
Вопросы, изложенные в этом разделе, рассмотрены в [1, 2, 4,
5, 8, 10, 11, 13, 15, 18, 19, 21, 22, 24, 26, 33, 34, 35, 39, 40, 47, 48].
Приложения
1. Характеристики случайных процессов
Случайный
процесс.
Многие физические
явления
описываются функциями времени, называемыми реализациями
процесса. При изучении такого явления каждая серия измерений
дает свою реализацию, которую нельзя предсказать достаточно
точно в пределах ошибки измерений. Такие процессы и
вызывающие их явления называются случайными. Случайный
процесс {x(t)} задается ансамблем реализаций xi (t) ; i=1,2….
Стационарный процесс. Средние характеристики процесса
{x(t)}, заданного ансамблем реализаций, можно определить для
любого заданного момента времени t1 путем усреднения по
ансамблю. Например, среднее значение и среднее значение
квадрата процесса в момент t1 определяются соответственно как
1 N
μ x (t1 ) = lim ∑ xi (t1 ) ,
(1.1)
N →∞ N
i =1
1 N
ψ x2 (t1 ) = lim ∑ xi2 (t1 ) .
(1.2)
N →∞ N
i =1
Среднее произведение значений процесса в моменты t1 и t1+τ ,
называемое ковариационной функцией при сдвиге τ, дается
выражением:
1 N
Rxx (t1 ,τ ) = lim ∑ xi (t1 )xi (t1 + τ ) .
(1.3)
N →∞ N
i =1
Аналогично определяются средние характеристики более
высокого порядка. В общем случае, когда одно или несколько
таких средних значений меняются с изменением момента t1,
процесс называется нестационарным. Если же все средние не
зависят от t1, то случайный процесс называется стационарным.
Средние характеристики стационарного процесса для любого
момента времени t можно определить путем усреднения по
ансамблю реализаций только в момент t1.
Эргодический процесс. Средние характеристики почти
любого стационарного процесса, найденные усреднением по
ансамблю в момент t1, совпадает с соответствующими средними,
вычисленными путем усреднения по времени в пределах одной
реализации. Например, средние значения, полученные по
формулам (1.1) – (1.3), можно определить в виде:
T
1
μ x = lim ∫ x(t )dt ,
(1.4)
T →∞ T
0
T
1
ψ = lim ∫ x 2 (t )dt ,
T →∞ T
0
2
x
(1.5)
T
1
Rxx (τ ) = lim ∫ x(t ) x(t + τ )dt ,
(1.6)
T →∞ T
0
где x(t) – произвольная реализация из заданного ансамбля.
Это утверждение справедливо для эргодических систем и
составляет содержание эргодической теоремы, которая
выполняется, если удовлетворяется условие:
T
1
Rxx (τ ) + μ x2 dτ → 0 при T → ∞ .
(1.7)
∫
T −T
Условие (1.7) является достаточным, но не необходимым
условием эргодичности. Например, на практике оно может
нарушаться,
когда
процесс
содержит
периодические
составляющие, однако и этом случае часто используют
усреднение по времени, но эти средние могут не совпадать для
различных реализаций.
На практике всегда стремятся иметь дело со стационарными
процессами, так как их проще анализировать. Обеспечить
стационарность можно поддерживая неизменными условия
проведения эксперимента. Следует отметить, что предельные
переходы в соотношениях (1.1)–(1.6) при измерениях
практически не осуществимы, и мы всегда получаем оценки
искомых средних, а не истинные значения. Поэтому очень важно
контролировать ошибки, обусловленные конечностью объема
выборки.
Ряды и преобразования Фурье. Разложение в ряд Фурье и
преобразование Фурье имеют важное значение при анализе
случайных процессов. Ряды используются как правило для
описания периодических процессов, а преобразования Фурье –
для непериодических.
Ряды Фурье. Пусть имеется периодический процесс x(t) с
периодом T, для которого при любом t справедливо равенство:
(1.8)
x(t ) = x(t ± kT ); k = 1, 2,3,... .
Фундаментальная (базовая) частота ƒ1 определяется выражением:
f1 = 1/ T .
(1.9)
Такой периодический процесс можно разложить в ряд Фурье:
∞
a
x(t ) = 0 + ∑ (ak cos 2π f k t + bk sin2π f k t ) ,
(1.10)
2 k =1
где ƒk=kƒ1=k/T; k=1,2,3,….
Таким образом, процесс x(t) описывается суммой синусоид и
косинусоид, частоты которых меняются дискретно с шагом
∆ƒ=ƒ1. Коэффициенты ak, bk в разложении определяются
следующими выражениями:
T
2
ak = ∫ x(t ) cos 2π f k t dt ,
(1.11)
T0
T
2
bk = ∫ x(t )sin 2π f k t dt k = 1, 2,3,... .
(1.12)
T0
В частности,
T
2
a0 = ∫ x(t )dt = μ x ,
(1.13)
T0
где μx – среднее значение процесса x(t).
В выражениях (1.11) – (1.13) циклическую частоту ƒk можно
заменить на круговую ωk=2πƒk, однако последняя имеет
размерность рад/с, поэтому удобнее использовать циклическую
частоту, выражаемую в герцах.
Полученные
соотношения
часто
используют
в
альтернативной
форме,
получаемой
после
несложных
преобразований:
∞
x(t ) = X 0 + ∑ X k cos(2π f k t − θ k )
(1.14)
k =1
или
x (t ) =
∞
∑ Ae
k =−∞
k
j 2π f k t
,
(1.15)
где X0=a0/2 ; X k = ak2 + bk2 , k=1,2,3,…; θk=arctg(bk/ak); A0=a0/2;
T
1
1
Ak = (ak − jbk ) = ∫ x(t )e − j 2π f k t dt , k = ±1, ±2, ±3,... .
T0
2
Последний результат вытекает из формулы Эйлера:
e − jθ = cosθ − j sin θ .
(1.16)
Соотношение (1.14) задает функцию x(t) в полярных
координатах (а не в прямоугольных), и на каждой дискретной
частоте ƒk она имеет модуль Xk и аргумент θk. Если функция x(t)
действительная, то её ряд Фурье можно представить в
комплексной форме. В частности для коэффициентов Ak имеем:
Ak = Ak e − jθ k k = ±1, ±2,... ,
(1.17)
где θk=arctg(bk/ak).
Если x(t) – действительная функция t, то выполняются
равенства:
A− k = Ak , θ − k = −θ k , A− k = A− k e − jθ − k = Ak e jθ k = Ak* ,
(1.18)
где * означает комплексное сопряжение.
Преобразование Фурье. Если реализация x(t) имеет
непериодический характер (переходный процесс, стационарный
случайный процесс), то рассмотренное выше представление в
виде ряда Фурье можно обобщить, переходя к пределу Т→ ∞, что
приводит к интегралу Фурье :
∞
X(f ) =
∫ x(t )e
− j 2π ft
dt , − ∞ < f < ∞ .
(1.19)
−∞
Этот интеграл существует, если выполняется условие:
∞
∫
x(t ) dt < ∞ .
(1.20)
−∞
Функция X(ƒ), задаваемая выражением (1.19) называется
прямым преобразованием Фурье (или спектром) функции x(t). В
свою очередь, функция x(t) получается путем обратного
преобразования Фурье функции X(ƒ) :
∞
x(t ) =
∫ X ( f )e
j 2π ft
df , − ∞ < t < ∞ .
(1.21)
−∞
Выражения (1.19) и (1.21) называются парой преобразований
Фурье. Следует отметить, что X(f) в общем случае является
комплекснозначной функцией частоты, определенной на всей
действительной оси, даже в том случае, когда x(t) –
действительная функция. Функция X(f) представима в виде
суммы действительной и мнимой частей:
X ( f ) = X R ( f ) − jX I ( f ) ,
(1.22)
X R ( f ) = X ( f ) cosθ ( f ) =
X I ( f ) = X ( f ) sin θ ( f ) =
∞
∫ x(t ) cos 2π ft dt ,
−∞
∞
∫ x(t )sin 2π ft dt .
−∞
Можно также ввести представление в полярных координатах:
X ( f ) = X ( f ) e − jθ ( f ) ,
(1.23)
где│X(ƒ)│– амплитудный спектр, а θ(ƒ) – фазовый спектр.
Финитное преобразование Фурье. В действительности
реализация x(t) стационарного случайного процесса (ССП)
наблюдается в течении конечного интервала времени Т, которое
определяет финитное (конечное) преобразование Фурье:
T
X T ( f ) = X ( f , T ) = ∫ x(t )e − j 2π ft dt .
(1.24)
0
При ограниченной длине реализаций ССП его финитное
преобразование существует всегда, в то время как
преобразование (1.19) может не существовать, если реализация
ССП теоретически определена при всех значениях t, и,
следовательно, выполняется равенство:
∞
∫
x(t ) dt = ∞ .
(1.25)
−∞
Из сравнения соотношений (1.15), (1.24) видно, что на
дискретных частотах ƒk=k/T финитное преобразование Фурье
связано с коэффициентами Ak ряда Фурье равенством:
X ( f k , T ) = TAk ; k = ±1, ±2,... .
(1.26)
Отсюда следует, что если ограничиться дискретным набором
частот, то выполнение финитного преобразования Фурье (ФПФ)
сводится к расчету коэффициентов ряда Фурье для функции,
имеющей период Т. Такие расчеты выполняются на ЭВМ по
известным процедурам.
Следует отметить, что, когда реализация x(t) представлена
временным рядом с интервалом дискретности ∆t, длина
реализации Т связана с объемом выборки равенством Т=N∆t, а
частота Найквиста ƒc=1/2∆t. Кроме того рассматриваемая
реализация имеет периодический характер с периодом равным Т,
так что базовая частота ряда Фурье ƒ1=1/Т, и разрешающая
способность по частоте ∆ƒ=ƒ1. Непрерывная реализация x(t)
заменяется временным рядом xn=x(n∆t), где n=1,2,…N, а
непрерывное
преобразование
Фурье
–
дискретной
последовательностью {Xk}={X(k∆ƒ)} k=1,2…,N. Отметим, что
погрешность дискретизации в данном случае равна нулю, так как
выполняется теорема Уиттекера [42]. Поскольку ƒс=(N/2)∆ƒ, то
значения Xk при k>N/2 определяются по предшествующим
значениям Xk. Пара преобразований Фурье определяется
соотношениями:
N
kn
X k = X (k Δf ) = Δt ∑ xn exp (− j 2π ), k = 1, 2,..., N ,
(1.27)
N
n =1
N
kn
xn = x(nΔt ) = Δf ∑ X k exp ( j 2π ), n = 1, 2,..., N .
(1.28)
N
k =1
Отсюда вытекают, в частности, приведенные выше равенства,
справедливые для дискретных последовательностей {xn}:
при всех k,
при
X − k = X k*
X N −k = X k*
X ( N / 2)+ k = X (*N / 2)−k при k=1,2,…,N/2, X k + N = X k
xn+ N = xn при всех n.
k=1,2,…,N/2,
при всех k,
(1.29)
Таким образом xn есть периодическая функция n по модулю N, а
Xk –периодическая функция k по модулю N.
Дельта-функция. Рассмотрим прямоугольную функцию ƒ(t),
симметричную относительно точки t=0, задаваемую уравнением:
⎧1/ α , t ≤ α / 2
.
(1.30)
f (t ) = ⎨
0,
/
2
α
t
≥
⎩
Площадь под ƒ(t) равна единице :
α /2
∞
S=
∫
−∞
f (t ) dt =
∫
α
−
1
α
/2
dt .
(1.31)
Пусть теперь ширина функции ƒ(t) уменьшается, а высота растет
так, чтобы сохранялась единичная площадь. Переходя к пределу
α→0 получаем дельта-функцию:
⎧⎪ lim f (t ) = ∞, t = 0
δ (t ) = ⎨ α →0
.
(1.32)
≠
0,
t
0
⎪⎩
В соответствии с уравнением (1.31) интеграл от δ(t) равен
единице:
ε
α
∫ε δ (t ) dt = αlim α = 1 ,
(1.33)
→0
−
где ε>0 – произвольная малая величина. Дельта-функция может
занимать произвольное положение t0 на оси абсцисс, и введение
масштабирующего множителя a дает интеграл от δ-функции,
равный a:
⎧ ∞, t = t 0
aδ (t − t0 ) = ⎨
,
0,
t
≠
t
0
⎩
(1.34)
t 0 +ε
∫ε aδ (t − t ) dt = a .
(1.35)
0
t0 −
Свертка δ-функции с произвольной функцией x(t) имеет вид:
∞
∫ x(t )δ (t − t ) dt = x(t ) ,
0
0
(1.36)
−∞
т.е. дает значение x(t) при t=t0. Это свойство дельта-функции
можно использовать для нахождения значения x(t) при t=t0. Пара
преобразований Фурье дельта-функции имеет вид:
∞
X(f ) =
∫ δ (t )e
− j 2π ft
dt = 1, − ∞ < f < ∞ ,
(1.37)
−∞
∞
x(t ) =
∫e
−∞
j 2π ft
df = δ (t ) .
(1.38)
Примеры преобразований Фурье. В таблице приведены
некоторые пары преобразований Фурье, удовлетворяющие
соотношениям (1.19) и (1.21).
Примеры преобразований Фурье.
x(t)
1
e j 2π f0t
x(t–τ0)
δ(f)
δ(f–f0)
cos2πf0t
sin2πf0t
⎧ 1, 0 ≤ t ≤ T
⎨
⎩0, t < 0; t > T
⎛ sin 2π bt ⎞
2ab ⎜
⎟
⎝ 2π bt ⎠
⎛ sin π bt ⎞
ab ⎜
⎟ cos 2π f 0t
⎝ π bt ⎠
e
−a t
X(f)
,a>0
X ( f )e− j 2π f τ 0
[ δ(f–f0)+ δ(f+f0)]/2
[ δ(f–f0) – δ(f+f0)]/2j
⎛ sin π f ⎞ − jπ ft
T⎜
⎟e
⎝ π fT ⎠
⎧ a,
⎨
⎩0,
⎧a,
⎨
⎩ 0,
−b ≤ f ≤ b
f >b
f0 − b / 2 ≤ f ≤ f0 + b / 2
f − f0 > b / 2
2a
a + (2π f ) 2
a
a
+ 2
2
2
2
2
a + 4π ( f + f 0 ) a + 4π ( f − f 0 ) 2
2
e
−a t
cos 2π f 0t , a > 0
∞
∫ x (u ) x (t − u )du
1
X1 ( f ) X 2 ( f )
2
−∞
Частотные характеристики систем. При анализе
измерительной системы предполагается обычно, что она
устойчива, имеет постоянные параметры и линейна.
Динамические свойства такой системы описываются импульсной
переходной функцией или весовой функцией, которая
представляет собой реакцию системы на входной сигнал x(t) в
виде дельта-функции, т.е.
h(t ) = y (t ) при x(t ) = δ (t ) ,
(1.39)
причем отсчет времени t начинается с момента подачи на вход
системы дельта-функции. В общем случае реакция y(t) системы
на произвольный входной процесс x(t) определяется интегралом
свертки (интеграл Дюамеля):
∞
y (t ) =
∫ h(τ ) x(t −τ )dτ ,
(1.40)
−∞
т.е. реакция системы y(t) есть взвешенная линейная сумма всех
прошлых и будущих значений входного процесса x(t), где роль
весов выполняют значения весовой функции в различные
моменты времени.
Так как реальная система реагирует на возмущение только
когда оно поступило на вход системы, то имеет место равенство:
h(t ) = 0 при τ < 0 .
(1.41)
Следовательно, нижний предел интегрирования в интеграле
свертки равен нулю. Постоянство параметров системы означает,
что её весовая функция не зависит от момента поступления
сигнала на вход системы, т.е. выполняется соотношение:
h(t ,τ ) = h(τ ) при − ∞ < t < ∞ ,
(1.42)
Устойчивость системы означает, что если сигнал на входе
ограничен, то и выходной сигнал также является ограниченным.
Это условие выполняется, если справедливо соотношение:
∞
∫
h(τ ) dτ < ∞ .
(1.43)
−∞
Наконец, линейность системы означает, что весовая функция h(τ)
не зависит от процесса на входе x(t):
∞
y (t ) = ∫ h(τ ) x(t −τ )dτ
при всех
x(t ) .
(1.44)
0
В частности, для линейной системы случайный входной
процесс с гауссовским распределением порождает гауссовский
процесс на выходе. В реальных ситуациях, например, при резком
изменении входного сигнала или при исследовании разрушений
конструкций под действием случайных нагрузок, линейность не
выполняется. Однако если изучаемый объект не является сильно
нелинейным, то можно использовать линейное приближение.
Динамические свойства изучаемых объектов принято
описывать не самой весовой функцией h(τ), а некоторым ее
линейным преобразованием, вид которого зависит от конкретной
задачи. Наиболее удобно для идеальной системы, обладающей
перечисленными
выше
свойствами,
пользоваться
преобразованиями Фурье, которые позволяют непосредственно
описывать динамические характеристики системы в некоторой
частотной области. Преобразования Фурье весовой функции h(τ),
удовлетворяющей условию h(τ)=0 при τ<0, имеет вид:
∞
H ( f ) = ∫ h(τ )e − j 2π f τ dτ
(1.45)
0
и называется комплексной частотной характеристикой системы.
В общем случае её можно представить в виде:
H ( f ) = H R ( f ) − jH I ( f ) ,
(1.46)
где HR и HI – действительная и мнимая части функции H(f)
соответственно, определяемые из соотношений:
∞
H R ( f ) = ∫ h(τ ) cos 2π f τ dτ ,
0
∞
H I ( f ) = ∫ h(τ )sin 2π f τ dτ ,
(1.46а)
0
На практике часто используют полярную форму записи для
частотной характеристики Н(ƒ):
H ( f ) = H ( f ) e − jϕ ( f ) ,
(1.47)
–
модуль,
называемый
амплитудной
где
│Н(ƒ)│
характеристикой, а φ(ƒ) – аргумент, называемый фазовой
характеристикой:
H ( f ) = [ H R2 ( f ) + H I2 ( f )]1/ 2 ,
H (f)
].
ϕ ( f ) = arctg[ I
(1.47a)
HR ( f )
Частотная характеристика удобна для описания динамических
свойств измерительной системы, на вход которой подается
гармоническое колебание с частотой ƒ. В этом случае сигнал на
выходе будет также гармоническим с частотой ƒ, но имеющим
другую амплитуду и сдвиг по фазе относительно входного
сигнала, а именно:
x(t ) = X sin 2π ft ,
y (t ) = Y sin(2π ft − θ ) .
(1.48)
Отношение амплитуд входного и выходного сигналов дает
амплитудную характеристику, а сдвиг по фазе – фазовую:
H ( f ) = Y( f ) / X ( f ) ; ϕ( f ) =θ ( f ).
(1.49)
При подаче на вход системы единичного скачка (функции
Хевисайда) наиболее удобно описывать динамические свойства
передаточной
функцией,
которая
представляет
собой
преобразование Лапласа весовой функции:
∞
W ( p ) = ∫ h(τ )e − pτ dτ ,
p = a + jb .
(1.50)
0
Положив a=0 и b=2πƒ получим, что на мнимой оси W(j2πƒ)=H(ƒ),
т.е. передаточная функция из соотношения (1.50) совпадает с
частотной характеристикой, определяемой соотношением (1.45).
Если a≠0, то функции H(ƒ) и W(p) различаются.
Модели объектов. Достаточно общей моделью является
модель вида:
yt ≡ y (t ) = f (t ) + ut ; t = 1, 2,..., T .
(1.51)
В этой модели результат измерения представляет собой сумму
детерминированной последовательности {ƒ(t)}, которую можно
назвать
систематической
составляющей
и
случайной
подчиняющейся
некоторому
последовательности
{ut},
вероятностному закону (их часто называют сигнал и шум). Эти
компоненты не наблюдаются по отдельности. При повторении
эксперимента функция ƒ(t) должна оставаться одной и той же, а
случайные составляющие представляются как различные
реализации случайного процесса. Случайные составляющие
включают и ошибки измерений, причем ƒ(t)=E[y(t)]. Можно
выделить два типа временных последовательностей ƒ(t), часто
называемых трендом. Один тип представляет медленно
меняющиеся функции времени, например, в виде полиномов
достаточно низкой степени. К другому типу принадлежат
циклические последовательности, например, конечные отрезки
ряда Фурье в виде αcosωt+βsinωt (0<ω<π) или в виде ρcos(ωt–φ) с
периодом 2π/ω. В этом случае последовательные значения y(t)
разбросаны случайным образом относительно кривой y=ƒ(t). Если
даже кривая известна и известен закон распределения ошибки, то
информация о значениях y1,..,yt–1 не позволит предсказать
значение y(t). Такая модель используется, например, в
астрономии, где ƒ(t) описывает пространственное положение (по
одной из координат) планеты в момент времени t, а ошибка
телескопа никак не влияет на положение планеты. В случае
маятника, совершающего свободные колебания, его смещение
описывается функцией ρcos(ωt–φ).
Одной из общих моделей, в которой влияние временного
параметра проявляется в случайной составляющей, является как
уже отмечалось, стационарный случайный процесс. Для его
аппроксимации часто используется процесс авторегрессии.
Пусть y1 имеет известное распределение с нулевым средним,
а y1 и y2 имеют совместное распределение совпадающее с
совместным распределением случайных величин y1 и ρy1 +u2 , где
u2 не зависит от y1 и имеет нулевое математическое ожидание.
Совместное распределение y1, y2 ,…, yt–1, yt для t=3,4,… будем
полагать в свою очередь таким же, как совместное распределение
y1, y2 ,…, yt–1, ρyt–1+ ut , причем величина ut не зависит от y1,…, yt–1,
и
имеет
нулевое
математическое
ожидание.
Тогда
последовательность {yt} образует стационарный случайный
процесс, а именно процесс авторегрессии:
yt = ρ yt −1 + ut .
(1.52)
Уравнение (1.52) является стохастическим разностным
уравнением первого порядка. В такой модели ut оказывает
влияние на yt и на все последующие yr (r>t). Условное
математическое ожидание yt при заданных значениях y1,…,yt–1
удовлетворяет равенству
E[ yt y1 ,..., yt −1 ] = ρ yt −1 .
(1.53)
Процесс авторегрессии второго порядка получается, если
взять совместное распределение y1,…,yt–1, yt таким же, как
совместное распределение y1,…,yt–1, ρ1yt–1+ ρ2yt–2+ut, где ut не
зависит от y1, y2 ,…,yt–1, t=3,4,…. Переменная yt может описывать
смещение колеблющегося маятника, который подвержен
случайным ударным воздействиям ut. Тогда ряд близок к
тригонометрической функции ρcos(ωt–φ) с переменной
амплитудой, переменной частотой и переменной фазой. Процесс
авторегрессии четвертого порядка (АР4), порожденный моделью:
4
yt = ∑ ρ s yt − s + ut
(1.54)
s =1
будет походить уже на сумму двух тригонометрических функций
с изменяющимися амплитудами, частотами и фазами.
Стационарный случайный процесс общего вида можно
аппроксимировать
процессом
авторегрессии
достаточно
высокого порядка:
k
yt = ∑ ρ s yt − s + ut
(1.55)
s =1
или процессом:
q
yt = ∑ ( Aj cos ω j t + B j sin ω j t ) ,
(1.56)
j =1
где Aj и Bj – независимые случайные величины с нулевыми
математическими ожиданиями и E[Aj2]=E[Bj2]=φ(ωj).
Вклад тригонометрической функции с частотой ωj/2π в
среднем пропорционален математическому ожиданию квадрата
ее амплитуды, т.е. 2φ(ωj). Поэтому стационарный случайный
процесс можно характеризовать спектральной плотностью S(ω),
т.е. такой функцией, для которой:
b
ϕ (ω
∫ S (ω ) dω = ∑
ω
a
j
); a ≤ω j ≤ b .
(1.57)
j
Характерное свойство ССП состоит в том, что ковариация Е[(yt–
E[yt])(ys-E[ys])] зависит только от разности │t–s│и ее можно
обозначить как σ(t–s).
Таким образом ковариационная последовательность и
спектральная плотность (если она существует) являются двумя
альтернативными формами описания структуры моментов
второго порядка ССП. Ковариационная последовательность
более удобна и информативна, когда большее значение имеет
временной
характер
последовательности
(например,
в
экономических задачах). Спектральная плотность более подходит
для других типов анализа, например, при описании физических
явлений (в частности, для анализа звука).
Вопросы этого раздела рассмотрены, например, в
[5,7,8,14,21].
2. Корреляционные функции и спектральные плотности
Пусть на входе измерительной системы действует
случайный процесс {x(t)}, а на входе получается процесс {y(t)},
которые являются стационарными и представимы своими
реализациями х(t) и у(t). Корреляцию между ними можно
определить, если ввести дополнительную переменную τ –
запаздывание у(t) относительно х(t). По аналогии со статическим
случаем определим корреляционную функцию х(t) и у(t) для
произвольного сдвига времени τ выражением:
Cxy (τ ) = E ⎡⎣{x(t ) − μ x (t )}{ y(t + τ ) − μ y (t )}⎤⎦ =
T
,
(2.1)
1
= Tlim
x
t
−
t
y
t
+
−
t
dt
=
R
−
μ
τ
μ
τ
μ
μ
{
(
)
(
)}{
(
)
(
)}
(
)
x
y
xy
x y
→∞ T ∫
0
где Rxy(τ) – взаимная ковариационная функция х(t) и у(t), а μx, μy –
соответствующие средние.
1T
Rxy (τ ) = Tlim
x(t ) y(t + τ )dt .
→∞ T ∫
0
(2.2)
В частности, если процессы на входе и выходе одинаковы, т.е.
{y(t)}={x(t)}, то выражение (2.1) принимает вид:
Cxx (τ ) = Tlim
→∞
T
1
{x(t ) − μ x (t )}{x(t + τ ) − μ x (t )}dt = Rxx (τ ) − μ x2 .
∫
T0
(2.3)
Тогда
1T
Rxx (τ ) = Tlim
x(t ) x(t + τ )dt
(2.4)
→∞ T ∫
0
называется ковариационной функцией х(t).
Иногда ковариационной функцией называют величину Cху,
определенную по (2.1). Поскольку Rxy(τ)=Сxy(τ)+μxμy, то
Rxy(τ)=Сxy(τ), если средние обоих процессов равны нулю, т.е.
процессы центрированы. По определению ковариационная
функция является четной, т.е. Rxх(–τ)=Rxх(τ). Взаимная
ковариационная функция не обладает этим свойством, но
удовлетворяет соотношению: Rxy(–τ)=Ryх(τ).
Из соотношений (2.3), (2.4) следует, что значение
ковариационной функции в нуле равно квадрату процесса:
Rxx (0) = ψ x2 = σ x2 + μ x2 .
(2.5)
Если процесс центрированный, т.е. μх =0, то Rxх(0)=σх2, и
ковариационная функция равна дисперсии. Если μх ≠0, то с
ростом τ ковариационная функция стремится к квадрату
среднего: Rxх(∞)= μх2, так как σх →0 при τ→∞.
На рис.1. представлены корреляционная и ковариационная
функции.
Rxx(τ)
Cxx(τ)
ψx2
σ x2
μx2
0
0
0
0 τ
Рис.1. Корреляционная и ковариационная функции.
Еще одним полезным соотношением является неравенство:
(2.6)
Rxy (τ ) ≤ Rxx (0) Ryy (0) ,
называемое неравенством для взаимных ковариационных
функций.
Аналогичное
неравенство
справедливо
для
корреляционных и взаимных
корреляционных функций и
позволяет ввести нормированную корреляционную функцию:
ρ xy (τ ) =
Cxy (τ )
Rxy (τ ) − μ x μ y
=
,
2
2
Cxx (0)C yy (0)
[ Rxx (0) − μ x ][ Ryy (0) − μ y ]
причем | ρxy(τ) ≤1| для всех τ.
(2.7)
Как было отмечено выше, взаимная ковариационная функция,
вообще говоря, не является четной, а Rxy(0) не связана каким-либо
определенным образом со средним квадратом реализаций. На рис.2
представлена типичная зависимость ковариационной функции.
Спектральные плотности. Спектральную плотность можно
определить как преобразование Фурье ковариационной функции,
посредством
обобщенного
преобразования
Фурье
или
посредством аналоговой фильтрации.
Rxy(τ)
τ
0
Рис.2. Типичная взаимная ковариационная функция.
Определение
спектральной
плотности
через
ковариационную функцию. Пусть имеется две реализации х(t) и
y(t) стационарных эргодических случайных процессов {х(t)},
{у(t)}. Их спектральная плотность дается соотношением:
∞
S xy ( f ) =
∫R
xy
(τ ) e − j 2π f τ dτ .
(2.8)
−∞
В общем случае процессы x(t) и y(t) различны, и Sxy называется
взаимной спектральной плотностью или взаимным спектром x(t)
и y(t). В частном случае, когда {y(t)} ={х(t)} имеем:
∞
S xx ( f ) =
∫R
xx
(τ ) e − j 2π f τ dτ ,
(2.9)
−∞
где Sxх(f) – спектральная плотность или спектр х(t). В теории
cвязи ее часто называют спектральной плотностью мощности,
автоспектральной плотностью или автоспектром.
Спектральные плотности, задаваемые выражениями (2.8) и
(2.9) определены для всех частот, как положительных, так и
отрицательных, поэтому их называют двусторонними спектрами.
Из свойств симметрии ковариационных функций следует, что
S xx (− f ) = S xx ( f ) ,
(2.10)
S xy (− f ) = S xy* ( f ) = S yx ( f ) .
(2.11)
Двусторонние плотности удобны для аналитического
изучения, но практически удобнее иметь дело со спектрами,
определенными только для неотрицательных частот. Такие
плотности (или спектры) называются односторонними и задаются
соотношениями:
∞
⎧
− j 2π f τ
dτ , f ≥ 0
⎪2S xy ( f ) = 2 ∫ Rxy (τ ) e
Gxy ( f ) = ⎨
,
(2.12)
−∞
⎪
0, f < 0
⎩
∞
⎧
− j 2π f τ
dτ , f ≥ 0
⎪2 S xx ( f ) = 2 ∫ Rxx (τ ) e
.
Gxx ( f ) = ⎨
−∞
⎪
0, f < 0
⎩
Связь между одно- и двусторонними
представлена на рис. 3.
(2.13)
спектрами
1
2
-f
0
f
Рис.3. Односторонняя (1) и двусторонняя (2) спектральные плотности
Так как ковариационные функции являются четными
функциями τ, то, очевидно, спектры задаются только
действительной
частью
преобразования
Фурье
(2.9).
Следовательно:
∞
∞
Gxx ( f ) = 2 ∫ Rxx (τ ) cos 2π f τ dτ = 4 ∫ Rxx (τ ) cos 2π f τ dτ .
−∞
0
(2.14)
Обратное преобразование дает ковариационную функцию:
Rxx (τ ) =
∞
∫S
xx
( f )e
−∞
j 2π f τ
∞
df = ∫ Gxx ( f ) cos 2π f τ df .
(2.15)
0
Из соотношений (2.14), (2.15) получаем при τ =0:
∞
Rxx (0) = ∫ Gxx ( f ) df = ψ x2 = σ x2 + μ x2 ,
(2.16)
0
т.е. площадь под графиком спектральной плотности равна сумме
дисперсии процесса и квадрата его среднего значения. Из
соотношений (2.3) и (2.9) получаем:
∞
S xx ( f ) =
∫C
xx
(τ ) e − j 2π f τ dτ + μ x2δ ( f ) ,
(2.17)
−∞
т.е. ненулевое среднее входит как дельта-функция при f=0 с
масштабирующим множителем μx². Площадь под графиком
спектра, заключенная в интервале частот от f1 до f2, равна
среднему квадрату процесса в этой полосе частот спектра (см.
рис. 4):
f2
ψ ( f1 , f 2 ) = ∫ Gxx ( f )df .
2
x
(2.18)
f1
Gxx(f)
μx2
0
ψ x2
f
f1
f2
Рис.4. Свойства спектральной плотности.
Взаимная ковариационная функция R xy(τ) равна обратному
преобразованию Фурье двустороннего взаимного спектра Sxу(f) из
соотношения (2.8):
Rxy (τ ) =
∞
∫S
xy
( f ) e j 2π f τ df .
(2.19)
−∞
В случае одностроннего спектра Gxу(f) соотношение (2.8)
принимает вид:
∞
Gxy ( f ) = 2 ∫ Rxy (τ ) e − j 2π f τ dτ = Cxy ( f ) − jQxy ( f ) .
(2.20)
−∞
Действительная часть Gxу(f):
∞
Cxy ( f ) = 2 ∫ Rxy (τ ) cos 2π f τ dτ
(2.21а)
−∞
называется коспектральной плотностью или коспектром, а
мнимая часть
∞
Qxy ( f ) = 2 ∫ Rxy (τ )sin 2π f τ dτ
(2.21б)
−∞
называется квадратурной спектральной плотностью или
квадратурным спектром. Через Сxy(f) и Qxy(f) соотношение (2.19)
записывается следующим образом:
∞
∞
1
1
j 2π f τ
Rxy (τ ) = ∫ Gxy ( f ) e
df + ∫ Gxy* ( f ) e − j 2π f τ df =
20
20
.
(2.22)
∞
= ∫ [Cxy ( f )cos 2π f τ + Qxy ( f )sin 2π f τ ] df
0
Отметим, что зная Cxy(f) можно найти Rxy(0). Удобно
выражать взаимные спектры через модуль и фазовый угол
Gxy ( f ) = Gxy ( f ) e
− jθ xy ( f )
,
(2.23)
Gxy ( f ) = Cxy2 ( f ) + Qxy2 ( f ) ,
(2.24)
θ xy ( f ) = arctg[Qxy ( f ) / Cxy ( f )] .
(2.25)
График типичной
приведен на рис.5.
взаимной
спектральной
плотности
⏐Gxy(f)⏐
θxy(f)
0
f
0
f
а
б
Рис.5. Типичная взаимная спектральная плотность: а – модуль, б – фаза
Знаки Сxy(f) и Qxy(f) могут быть положительными и
отрицательными и определяют квадрант, в котором находится
фазовый угол θxy(f). Положительное значение θxy(f) соответствует
запаздыванию y(t) относительно
x(t) на частоте f, а
отрицательное значение показывает, что y(t) опережает x(t) на
частоте f. Иными словами, эти знаки показывают, следует ли
процесс y(t) за x(t), т.е. выполняется ли соотношение y(t)=x(t – τ0)
при некотором τ0>0, что соответствует положительному
запаздыванию сигнала, передаваемого из точки x в точку у на
частоте f. Из равенства y(t)=x(t – τ0) следует, что у(0) вызвано
x(– τ0), а у(τ0) вызвано x(0), при условии измерения сигналов в
этих точках в одной шкале времени.
Модуль взаимного спектра входит в важное неравенство для
взаимных спектров:
2
Gxy ( f ) ≤ Gxx ( f )G yy ( f ) ,
(2.26)
которое аналогично неравенству для взаимных ковариационных
функций (2.6) и позволяет определить функцию когерентности:
γ xy2 ( f ) =
Gxy ( f )
2
Gxx ( f )G yy ( f )
, 0 ≤ γ xy2 ( f ) ≤ 1 ,
которая аналогична квадрату нормированной
функции, задаваемой соотношением (2.7).
(2.27)
корреляционной
Определение спектральных плотностей посредством
преобразования Фурье. Пусть {x(t)}, {y(t)} – два стационарных
эргодических случайных процесса. Финитные преобразования
Фурье k-х реализаций длины Т каждого процесса определяются в
виде:
T
X k ( f , T ) = ∫ xk (t ) e − j 2π ft dt ,
0
T
Yk ( f , T ) = ∫ yk (t ) e − j 2π ft dt .
(2.28)
0
Двусторонняя взаимная спектральная плотность этих двух
процессов определяется соотношением:
1
S xy ( f ) = lim E[ X k* ( f , T )Yk ( f , T )] ,
(2.29)
T →∞ T
где Е – математическое ожидание, обозначающее усреднение по
индексу k. Односторонние взаимные спектральные и
спектральные плотности определяются следующим образом:
2
Gxy ( f ) = lim E[ X k* ( f , T )Yk ( f , T )] ,
(2.30)
T →∞ T
2
2
Gxx ( f ) = lim E[ X k* ( f , T ) X k ( f , T )] = E[ X k ( f , T ) ] .
(2.31)
T →∞ T
Отметим, что в определение спектральных плотностей
используется произведение Х*Y, но не ХY*. Функции плотностей,
определенные
соотношениями
(2.29)–(2.31)
идентичны
соответствующим функциям, определенным по (2.8)–(2.13) как
преобразования Фурье. Это утверждение называется теоремой
Винера–Хинчина. Все соотношения и свойства для спектральных
плотностей, введенные ранее, сохраняются.
Определение спектральных плотностей посредством
аналоговой фильтрации. До внедрения цифровых способов
обработки сигналов спектральные плотности, в основном,
автоспектры оценивались при помощи аналоговых анализаторов.
Этот способ используется и в настоящее время. Суть его сводится
к следующему. Реализация случайного процесса х(t) проходит
через узкополосный фильтр с полосой пропускания Δf и
изменяемой частотой среза f. Выходной сигнал этого фильтра
х(f,Δf, t) возводится в квадрат и усредняется по времени, а затем
делится на Δf; в итоге получается оценка спектральной плотности
вида
T
1
x 2 ( f , Δf , t )dt .
(2.32)
∫
(Δf )T 0
Если в полученной оценке перейти к пределу T→ ∞, Δf → 0 так,
что (Δf)T→∞, то в результате получим одностороннюю
спектральную плотность, совпадающую с определенными ранее
из соотношений (2.13), (2.30)
T
⎡
⎤
1 2
Gxx ( f ) = lim ⎢ lim ∫ x ( f , Δf , t )dt ⎥ .
(3.33)
Δf →0 T →∞ T
0
⎣
⎦
Некоторые
ковариационные
функции
и
функции
спектральной плотности, применяемые в теоретических
исследованиях, приведены в таблице.
Вопросы данного раздела рассмотрены, например, в [5, 7, 8,
9, 12, 45].
G€xx ( f ) =
Примеры ковариационной функции и функции спектральной
плотности.
Тип
Ковариационна Односторонняя
спектральная
я функция,
Rxx(τ)
Постоянная
Гармоническая
Белый шум
C2
X2/2cos2πf0τ
aδ(τ)
Низкочастотный
белый шум
Ограниченный
по частоте
белый шум
Экспоненциальная
Экспоненциальнокосинусоидальная
Экспоненциальнокосинусоидальносинусоидальная
absin2πbτ/(2πbτ)
плотность,
Gxx(f)
C2δ(f)
X2/2 δ(f−f0)
2a, f≥0
0 в остальных случаях
a, 0≤f≤b
0 в остальных случаях
absinπbτ/(πbτ)·
·cos2πf0τ
a, 0≤f0−(b/2) ≤ f≤ f0+(b/2)
0 в остальных случаях
exp(−a|τ|)
exp(−a|τ|)cos2πf0τ
4a/(a2+4π2f 2)
2a[1/(a2+4π2(f+ f0)2)+
+1/(a2+4π2(f−f0)2)]
2
2
exp(−a|τ|)(gcos2πf0τ+ [2ag+4πh(f+f0)]·[(a +4π ·
2 −1
(f+f0) )] +[2ag−4πh(f−f0)]·
+hsin2πf0|τ|)
·[(a2+4π2(f−f0)2)]−1
3. Определение переходной функции системы
Пусть передаточная функция системы представима в виде
отношения двух многочленов:
W ( p) =
B( p ) ,
A( p)
(3.1)
где – B(p)=b0pm+…+bm; A(p)=a0pn+…+an,причем m<n.
Передаточная функция связана с переходной
преобразованием Лапласа:
∞
W ( p) = ∫ h(τ )e− pτ dτ ; p = α + j β .
функцией
(3.2)
0
Тогда переходная функция системы находится с помощью
обратного преобразования Лапласа:
h(τ ) = L−1[W ( p)] ,
(3.3)
L−1[W ( p)] =
1
σ1+ j∞
W ( p)e
2π j σ −∫ j∞
pt
dp .
(3.4)
1
Для вычисления обратного преобразования Лапласа сначала
находятся корни pk характеристического уравнения A(p)=0:
непосредственно (при n≤4) или численными методами (при
n>4). Если все корни простые, то есть А(р)=a0(р−р1)⋅(р−р2)⋅…⋅
(р−рn), то имеет место соотношение:
L−1[W ( p)] = L−1[ B( p) ] =
A( p)
B( pk ) pk t
e ; (t > 0) .
∑
k =1 A′( pk )
n
(3.5)
l
Если корни кратные, то есть A( p) = a0 ( p − p1) 1...( p − pn )ln ,
то
L−1 определяется выражением (формула Хевисайда):
L−1[W ( p)] =
l
pt
1 [ ( p − pk ) k B( p)e ](lk −1)
p = pk
∑
A( p)
k =1 (lk −1)!
n
(3.6)
Выражение (3.6) можно представить в виде:
L−1[W ( p)] =
n lk
l −i pk t
H kit k
∑∑
k =1 i =1
e , (t > 0) ,
(3.7)
где
l
i −1 ( p − p ) k B( p)
1
d
k
H ki =
[
] p= pk .
(i −1)!(lk −1)! dpi−1
A( p)
Отметим, что система устойчива, если корни
отрицательные действительные части.
В частности, если W ( p) =
(3.8)
рk
имеют
1
, то
( p − p1)( p − p2 )( p − p3 )
h(t ) = L−1[W ( p)] = C1e p1t + C2e p2t + C3e p3t ,
(3.9)
где
1
1
; C2 =
;
( p1 − p2 )( p1 − p3 )
( p2 − p1)( p2 − p3 )
1
.
C3 =
( p3 − p1)( p3 − p2 )
C1 =
(3.10)
Вместо формулы Хевисайда можно использовать разложение,
применяемое при решении дифференциальных уравнений. Если
А(р) и В(р) не имеют совпадающих корней, то каждому
действительному корню рk уравнения А(р)=0 отвечает lk простых
дробей вида:
cl
c1
c2
k
,
,...,
,
2
lk
p − pk ( p − pk )
( p − pk )
(3.11)
где lk – кратность корня рk. Каждой паре комплексносопряженных корней рk =α+iβ отвечает lk простых дробей вида:
d1
p + gl
p + g1
p + g2
k
d
d
,
,...,
,
2
lk
2
2
2
2
2
lk
2
2
( p −α ) + β
[( p −α ) + β ]
[( p −α ) + β ]
где lk – кратность корней рk=α+iβ.
Тогда L−1[W ( p)] находится как сумма обратных преобразований
Лапласа таких слагаемых.
В частности,
L−1[ 1 ] = e p1t ,
p − p1
(3.12)
L−1[
p1t
1
=
te
,
]
( p − p1)2
(3.13)
L−1[
p+ g
] = C1eα t sin( β t + ϕ ) ,
2
2
( p −α ) + β
(3.14)
где C1 = 1 [(α + g )2 + β 2 ]1/2 , ϕ = arctg α β
+g ;
β
1
L−1[
] = 1 3 eα t (sin β t − β t cos β t ) .
2
2
2
[( p −α ) + β ]
2β
(3.15)
Вопросы этого раздела рассмотрены, например, в [20, 45].
4. Типы распределений, используемых при оценке
надежности СИ
Распределение Вейбулла. Оно является
Плотность распределения задается выражением:
f ( x; a, b, c) = c / b(( x − a) / b)c−1 exp{−(( x − a) / b)c},
непрерывным.
(4.1)
где х – случайная величина; x>a, b>0, c>0, a – параметр сдвига, b
– параметр масштаба, с – параметр формы. При испытаниях на
долговечность параметр а обозначает длительность начального
периода, в течение которого происходят отказы. Интенсивность
отказов и плотность распределения Вейбулла принимают
различные формы при разных с. В частности, при
с>1
распределение одновершинное, и интенсивность отказов
возрастает с течением времени. При с<1 распределение имеет вид
кривой убывающей функции, и интенсивность отказов с
течением времени уменьшается. При с=1 интенсивность отказов
постоянна,
и
распределение
Вейбулла
совпадает
с
экспоненциальным(см. ниже). В этом случае параметр масштаба
b=1/λ, где λ – параметр
экспоненциального распределения.
Распределение Вейбулла часто используется в качестве модели
для времени безотказной работы на основе экспериментальных
данных. Вероятность отказа за время t определяется выражением:
t
P0 (t ) = ∫ f ( x; a, b, c)dx = 1− exp{−((t − a) / b)c} .
(4.2)
a
Математическое ожидание для этого распределения равно:
E[ x] = ab + b2 / cΓ(1/ c) .
(4.3)
Дисперсия равна:
D[ x] = a 2 − ab + 2ab / cΓ(1/ c) − b2 / cΓ(1/ c) + 2b2 / cΓ(2/ c) .
(4.4)
Отрицательное экспоненциальное распределение. Оно также
является
непрерывным.
Плотность
экспоненциального
распределения равна:
f ( x, λ ) = λ exp(−λ x); x ≥ 0, λ > 0 ,
(4.5)
где λ имеет смысл интенсивности отказов. Иногда употребляется
другой параметр b=1/λ. Экспоненциальное распределение
является частным случаем гамма-распределения при с=1. В
теории надежности это распределение является статистической
моделью времени безотказной работы для системы с большим
числом последовательно соединенных элементов. Вероятность
отказа системы за время t дается выражением:
P0 (t ) = 1− exp(−λt ) .
(4.6)
Для этого распределения характерна резко выраженная
правосторонняя (положительная) асимметрия, кроме того,
математическое
ожидание
равно
среднеквадратичному
отклонению.
Математическое
ожидание
определяется
выражением:
∞
E[ x] = D[ x] = ∫ xλ exp(−λ x)dx = 1/ λ .
(4.7)
0
Биномиальное
и
отрицательное
биномиальное
распределение. Эти распределения являются дискретными.
Предположим, что проводится серия независимых испытаний, в
каждом из которых возможны лишь два исхода: успех или
неудача. Обозначим вероятность успеха р, а вероятность неудачи
q=1–р. Предполагается, что р одинаково в каждом испытании.
Например, при контроле СИ р – вероятность, что СИ будет
годным, а q – что негодным. Тогда вероятность того, что в
последовательности из n испытаний успехи осуществляются в
точности k раз, дается выражением:
P( x = k ) = Cnk p k q n−k , 0 < p < 1.
(4.8)
Функция (4.8), определенная при k=0,1,…,n, задает биномиальное
распределение с параметрами n и p. Это очень важное дискретное
распределение, широко используемое при статистическом
контроле качества продукции, при описании систем массового
обслуживания и т.п. Биномиальное распределение симметрично
при р=0,5; при р<0,5 – более пологое справа; при р>0,5
распределение более пологое слева. При расчетах вероятностей
удобно рекуррентная формула:
P(k +1) = (n − kp) P(k ) /((k +1)q) .
(4.9)
Математическое ожидание для этого распределения равно
E[x=k]=np; а дисперсия D[x=k]=npq, т.е. дисперсия меньше
среднего. Отрицательное биномиальное распределение получило
свое название в связи с тем, что формула распределения
вероятностей для него определяется разложением бинома с
отрицательной степенью. В этом распределении число испытаний
является случайной величиной, и число успехов k становится
параметром. Распределение позволяет определить вероятность
числа неудач r до k-го успеха, которая равна члену
биномиального разложения выражения pk(1–q)-k, включающему
qr, а именно:
P( x = r ) = Ckr+r −1 p k q r ; n ≥ 0; 0 < p < 1 .
(4.10)
Математическое ожидание равно: E[x=r] = kq/p, а дисперсия:
D[x]=kq/p². Легко видеть, что для этого распределения
наблюдаемая дисперсия больше наблюдаемого среднего.
Отрицательное биномиальное распределение имеет интересные
приложения. Например, оно позволяет оценить «склонность» к
отказам, авариям, несчастным случаям объектов некоторого типа.
Распределение Пуассона. Это распределение является
дискретным. Если в биномиальном распределении положить
np=λ и при постоянном λ увеличивать n (n →∞), то биномиальное
распределение перейдет в распределение Пуассона с параметром
λ. Это распределение используется для определения вероятности
появления относительно редких случайных событий в единицу
времени, на единицу площади или объема, например, число
случаев брака, число внезапных отказов, число стихийных
бедствий и т.д. на единицу времени или пространства.
Вероятность числа таких событий за фиксированный интервал
времени дается выражением
P( x = r ) = λ r e−λ / r !, 0 < λ < ∞ .
(4.11)
Математическое ожидание для этого распределения равно
дисперсии: Е[х]=D[х]=λ, и определяется параметром λ.
Распределение имеет положительную асимметрию λ⎯0,5, которая
стремится к нулю с ростом λ, т.е. с увеличением λ распределение
становится более симметричным, отдельные вероятности при λ<1
с ростом r уменьшаются; при λ>1 – сначала увеличиваются, затем
уменьшаются. Максимум распределения приходится на
ближайшее целое, меньше λ. При четном λ имеются два равных
максимума вероятностей. Отметим, что сумма случайных
величин, каждая из которых имеет распределение fi , имеет
обобщенное распределение Пуассона
∞
(hi )t = e−λt ∑ [(λt )n / n!] f in∗ ,
n∗ –
n =0
(4.12)
свертка n функций fi . В частности, если распределение
где f i
fi пуассоновское, то f i2∗ = f (r;2λ ) , где f (r;2λ ) – распределение
вида (4.11).
Гамма-распределение.
Это
распределение
является
непрерывным и используется для описания случайных величин,
ограниченных с одной стороны. Его плотность имеет вид
⎛
⎞
f ( x) = 1 ⎜ x − a ⎟
bΓ(c) ⎝ b ⎠
c−1
e
− x −a
b ;
x ≥ 0; b > 0; c ≥ 0,5 ,
(4.13)
где а – параметр сдвига, b – параметр масштаба, с – параметр
формы, Г(с) – известная гамма-функция. Если с – положительное
целое число, то Г(с)=(с-1)!. Обычно полагают при расчетах а=0, а
вместо b используют другой параметр λ=b⎯¹. При изменении
параметра λ форма распределения не меняется, а меняется
только масштаб. В частности, при с<1 плотность распределения
имеет вид убывающей функции, а при с>1 представляет собой
одновершинную кривую с максимумом в точке х=(с-1)/λ. Гаммараспределение описывает время, необходимое для появления
ровно c независимых событий (например, отказов), если они
происходят с постоянной интенсивностью. Гамма-распределение
играет важную роль в теории массового обслуживания, где
рассматриваются задачи, связанные с ожиданием в очереди.
Если, например, заявки на контроль и ремонт СИ поступают с
постоянной интенсивностью (λ единиц в месяц) независимо друг
от друга, а контроль и ремонт СИ производится партиями
объемом c, то время, за которое будут проверены все приборы
является случайной величиной, подчиняющейся гаммараспределению. Его широкое использование объясняется тем, что
гамма-распределение принимает самые разнообразные формы.
Частными
случаями
этого
распределения
являются
распределения: Эрланга, когда параметр с – натуральное число;
"хи-квадрат", когда параметр λ=0,5 и с
кратно 0,5;
экспоненциальное, когда параметр с=1. Часто гаммараспределение используется в альтернативной форме:
f ( y) = 1 y p−1e− y , 0 < p < ∞ ,
Γ( p )
(4.14)
где p – параметр формы и введена новая переменная y=(x–a)/b.
Математическое ожидание в этом случае равно: M[y]=p;
дисперсия равна математическому ожиданию, т.е. D[y]=p.
Вопросы, изложенные в данном разделе, рассмотрены,
например, в [22, 35, 45].
5. Примеры решения задач
Задача 1.
Фильтр нижних частот (ФНЧ) имеет следующие параметры: R
=200 кОм, C =0,4 мкФ. Требуется определить погрешность
фильтра по амплитуде на граничной частоте ω=ωg.
Решение.
Амплитудно-частотная характеристика (АЧХ) фильтра дается
выражением (3.33) [42]:
1
H (ω ) =
.
2
2
1+ ω / ωg
Определим граничную частоту ω g = 1/ RC . Подставляя исходные
данные, найдем ω g =12,5 Гц. Значение АЧХ на этой частоте равно:
H (ω g ) =
1
= 0, 71
1+1
.
Относительная погрешность ФНЧ равна:
δ H (ω ) =
g
H (ω g ) − H (0)
H (0)
=
0, 71 − 1
= 0, 29 = 29% .
1
Погрешность фильтра понимается здесь как уменьшение
амплитуды сигнала на выходе по сравнению с сигналом на входе.
Задача 2.
Фильтр верхних частот (ФВЧ) имеет следующие параметры: R
=50 кОм, C =0,1 мкФ. Требуется определить погрешность
фильтра по амплитуде на частоте ω=10ωg.
Решение.
АЧХ ФВЧ дается выражением (3.40) [42]:
H (ω ) =
ω / ωg
1 + ω 2 / ω g2
.
Определим граничную частоту ω g = 1/ RC . Подставляя исходные
данные, найдем ω g =200 Гц. Значение АЧХ на частоте ω=10ωg
равно:
10
H (10ω g ) =
= 0,995 .
2
1 + 10
Относительная погрешность ФВЧ равна:
δ H (10ω ) =
H (10ω g ) − H (∞)
g
H (∞ )
=
0,995 − 1
= 0, 005 = 0,5% .
1
Задача 3.
Полосовой фильтр (ПФ) имеет следующие параметры: R1 = R2
=100 кОм, C1 = C2 =0,2 мкФ. Требуется определить погрешность
фильтра по амплитуде на частоте ωg.
Решение.
АЧХ ПФ дается выражением (3.44) [42]:
H (ω ) =
ω / ωg
.
1 + ω 2 / ω g2
Определим граничную частоту ω g = 1/ RC . Подставляя исходные
данные, найдем ω g =50 Гц. Значение АЧХ на частоте ωg равно:
H (ω g ) =
1
= 0,5 .
1+1
Относительная погрешность ПФ равна:
δ H (ω ) =
g
0,5 − 1
= 0,5 = 50% .
1
Задача 4.
Определите предельную точность осциллографа при
температуре 40о C, если его входное сопротивление 200 МОм,
полоса частот 10 МГц.
Решение.
Точность осциллографа ограничена тепловым шумом. Для
определения эффективного напряжения теплового шума
используем формулу Найквиста (2.3.13):
U R2, эфф = 4kTRΔν
Подставляя исходные данные, найдем:
U R2, эфф = 4 ⋅1,38 ⋅10−23 ⋅ 3,13 ⋅102 ⋅ 2 ⋅102 ⋅106 ⋅10 ⋅106 = 35 ⋅10−6 ,
U R , эфф ≅ 6 ⋅10−3 В .
Задача 5.
Определите предельную точность вакуумного диода при
температуре 20о C, если величина тока 10 мА, полоса частот 100
кГц.
Решение.
Точность диода ограничена дробовым эффектом. Для
определения эффективного эффективного шумового тока
используем уравнение Шотки (2.3.35):
I S2, эфф = 2eI 0 Δν .
Подставляя исходные данные, найдем:
I S2, эфф = 2 ⋅1,6 ⋅10−19 ⋅ 20 ⋅10−3 ⋅ 2 ⋅102 ⋅103 = 12,8 ⋅10−16 ,
I S , эфф ≅ 3, 6 ⋅10−8 А .
Задача 6.
Определите число фотонов, которое в среднем должен
зарегистрировать фотодиод на длине волны 400 нм в полосе
частот 100 кГц за время 10 мс.
Решение.
Значение числа фотонов ограничено квантовым шумом
приемника. Для определения числа фотонов используем ф.(2.3.45)
для эквивалентной мощности шума на детекторе:
PR , эфф = 2hνΔν
Подставляя исходные данные, найдем число фотонов:
n = Pt / hν = 2Δν t = 2 ⋅105 ⋅10 ⋅10−3 = 2 ⋅103 .
Задача 7.
Измерительное устройство состоит из 4 последовательно
соединенных элементов с функциями преобразования f1 =2, f2 =3,
f3 =2, f4 =3. Определите относительную погрешность сигнала на
выходе,
если
относительная
погрешность
функций
преобразования элементов составляет δf1 =1%, δf2 =2%, δf3 =3%,
δf4 =1%. Погрешность входного сигнала считать пренебрежимо
малой.
Решение.
Применим ф.(3.1.9), полагая δ x = 0 :
4
δ y = ∑ δ fi
i =1
Подставляя исходные данные, найдем δ y = 7% .
Задача 8.
Измерительное устройство состоит из 4 параллельно
соединенных элементов с функциями преобразования f1 =2, f2 =3,
f3 =2, f4 =3. Определите относительную погрешность сигнала на
выходе,
если
относительная
погрешность
функций
преобразования элементов составляет δf1 =1%, δf2 =2%, δf3 =3%,
δf4 =1%. Погрешность входного сигнала считать пренебрежимо
малой.
Решение.
Применим ф.(3.1.18), полагая δ x = 0 :
4
4
i =1
i =1
δ y = ∑ f iδ f i / ∑ f i .
Подставляя исходные данные, найдем δ y = 1, 7% .
Задача 9.
Измерительное устройство состоит из 2-х элементов,
соединенных параллельно по схеме с отрицательной обратной
связью. Функции преобразования элементов f1 =3 (прямая цепь), f2
=1(обратная цепь). Определите относительную погрешность
сигнала на выходе, если относительная погрешность функций
преобразования элементов составляет δf1 =4%, δf2 =0,1%.
Погрешность входного сигнала считать пренебрежимо малой.
Решение.
Применим ф.(3.1.28а), полагая δ x = 0 :
δ y = (δ f1 + f1 f 2 signf 2 δ f 2 ) / Q .
Подставляя исходные данные, найдем δ y = 1, 075% .
Задача 10.
При определении скорости звука в тонком стержне из
аллюминия были получены следующие резуьлтаты: среднее
значение v = 5060 м / с , средняя ошибка Sv = 3% (число измерений
n=5). Исследовалось также влияние на результат измерения
систематических ошибок, вызванных градиентом температуры в
образце ( θ1 ), непараллельностью торцов (θ 2 ) и анизотропией
образца (θ 3 ). Значения границы систематической ошибки для
этих факторов составляют: θ1 = 2% , θ 2 = 3% , θ 3 = 3% . Требуется
оценить точность результата измерения с учетом случайных и
систематических составляющих.
Решение.
Решим задачу двумя способами: используя понятие погрешности
(ошибки) и понятие неопределенности. Будем считать, что
случайные ошибки имеют нормальное распределение, а
систематические – равномерное. Доверительную вероятность
примем равной P=0,95.
1-й способ. Для решения используем формулы теории ошибок
[42]. Доверительный интервал определяется выражением:
Δ = tP ⋅ SΣ , где SΣ – суммарная ошибка, а tP – параметр,
определяемый
как
среднее
взвешенное
случайной
и
систематической, зависящий от доверительной вероятности.
Имеем следующие соотношения:
tP =
t1P ⋅ Sθ + t2 P ⋅ Sv
; SΣ = Sθ2 + Sv2 ; t1P ⋅ Sθ = k1
Sθ + Sv
m
∑θi2 ; Sθ =
i =1
m
Sθ2 ;
∑
i =1
i
Sθi = θi / 3 , где m – число систематических составляющих, P –
доверительная вероятность. В нашем случае m=3, P=0,95.
Значение коэффициента k1 зависит от вероятности и
определяется приближенно. В нашем случае оно равно k1 = 1,1
(при P=0,95). Значение t2P определяется по таблице
распределения Стьюдента при P=0,95 и числе степеней свободы
n − 1 . В нашем случае n − 1 = 4 и t2 P = 2,8 . Для остальных величин
расчеты дают: Sθ = 2,7% , t1P ⋅ Sθ = 4,7% , tP = 2, 4 , SΣ = 4,04 .
Доверительный интервал равен Δ = 2, 4 ⋅ 4,04 = 9,7% .
2-й способ. Для решения используем формулы (1.1.2 –1.1.8).
Расширенная неопределенность задается выражением: ua = k ⋅ uS .
Подставляя исходные данные, найдем:
uS = 4,04% , ν eff = 13,7 . Из таблицы распределения Стьюдента
определим
коэффициент
k
(при
P=0,95):
k = 2,145 .
Неопределенность результата ua = 8,7% .
Таким образом, оценки первым и вторым способом
получаются
близкими.
Расширенная
неопределенность,
характеризующая точность результата, меньше на 1%, чем
доверительная ошибка. Отметим еще раз, что основное
преимущество второго подхода в более ясной схеме сложения
неопределенностей, имеющих разное происхождение. Сложение
ошибок в первом подходе основано на прближенных
полуэмпирических соотношениях, не имеющих строгого
обоснования.
Литература
1. Азизов А.М., Гордов А.Н. Точность измерительных
преобразователей. – Л.: Энергия, 1975.
2. Алиев Т.М., Тер-Исраелов Г.С., Тер-Хачатуров А.А.
Вероятностные измерительно-вычислительные устройства. – М.:
Энегроатомиздат, 1983.
3.Алиев Т.М., Тер-Хачатуров А.А. Измерительные устройства:
Учебник для вузов. – М.: Высшая школа, 1991.
4. Алиев Т.М., Тер-Хачатуров А.А., Шекиханов А.М. Интерационные
методы повышения точности измерений. – М.: Энергоатомиздат, 1986.
5. Андерсон Т. Статистический анализ временных рядов. – М.:
Мир, 1976.
6. Антушев Г.С. Методы параметрического синтеза сложных
технических систем. – М.: Наука, 1989.
7. Бендат Дж., Пирсол А. Прикладной анализ случайных данных.
– М.: Мир, 1989.
8. Бендат Дж., Пирсол А. Применения
спектрального анализа. – М.: Мир, 1983.
корреляционного
и
9. Бокс Дж., Дженкинс Г. Анализ временных рядов. – М.: Мир,
1974.
10. Браславский Д.А., Петров В.В. Точность измерительных
устройств. – М.: Машиностроение, 1976.
11. Бромберг Э.М., Куликовский К.Л. Тестовые методы
повышения точности измерений. – М.: Энергия. 1978.
12. Ван-дер-Зил А. Шум. Источники, описание, измерение. – М.:
Сов. радио, 1973.
13. Ван Трис Г. Теория обнаружения, оценок и модуляции. – М.:
Сов. радио, 1972.
14. Гарднер М., Бернс Дж. Переходные процессы в линейных
системах. – М.: Физматгиз, 1961.
15. Гехер К. Теория чувствительности и допусков электронных
систем. – М.: Сов. радио, 1973.
16. ГОСТ 1.25-76.ГСС. Метрологическое обеспечение. Основные
положения.
17. ГОСТ 8.009-84.ГСИ. Нормируемые метрологические
характеристики СИ.
18. Земельман М.А. Автоматическая коррекция погрешностей
измерительных устройств. – М.: Издательство стандартов, 1972.
19. Золотова Т.М., Кербников Ф.И., Розенблат М.А.
Резервирование аналоговых устройств автоматики. – М.:
Энергоатомиздат, 1986.
20. Иванов В.В. Методы вычислений на ЭВМ. – Киев: Наукова
думка, 1986.
21. Калман Р., Фалб П., Арбиб М. Очерки по математической
теории систем. – М.: Мир, 1971.
22. Крамер Г. Методы математической статистики. – М.: Мир,
1975.
23. Кунце Х.-И. Методы физических измерений. – М.: Мир, 1989.
24. Макшанов А.В., Мусаев А.А. Робастные методы обработки
результатов измерений: Учеб. пособие. – М.: Оборонгиз, 1980.
25. Малахов А.Н. Флуктуации в автоколебательных системах. –
М.: Радио и связь, 1968.
26. Методы электрических измерений: Учеб. пособие/Под
редакцией Э.И. Цветкова. – Л.: Энергоатомиздат, 1990.
27. МИ 2552-99. Рекомендация. ГСИ. Применение "Руководства
по выражению неопределенности измерений". – СПб.: ВНИИМ
им. Д.И. Менделеева, 1999.
28. Моисеев В.С. Системное проектирование преобразователей
информации. – Л.: Машиностроение, 1982.
29.Мостеллер Ф., Тьюки Дж. Анализ данных и регрессия. – М.:
Финансы и статистика, 1982.
30. Мудров В.И., Кушко В.Л. Методы обработки результатов
измерений. – М.: Радио и связь, 1983.
31. Островерхов В.В. Динамические погрешности аналогоцифровых преобразователей. – Л.: Энергия. 1975.
32. Отнес Р., Эмоксон Л. Прикладной анализ временных рядов. М.: Мир, 1982.
33. Отт Г.У. Методы подавления шумов и помех в электронных
системах. – М.: Мир, 1979.
34. Петров Б.Н. Принцип инвариантности в измерительной
технике. – М.: Наука, 1976.
35. Петрович М.Л., Давидович М.И. Статистическое оценивание
и проверка гипотез на ЭВМ. – М.: Финансы и статистика, 1989.
36. Пирс Дж. Символы, сигналы, шумы. Закономерности и
процессы передачи информации. – М.: Мир, 1967.
37. Рей Ф. Статистическая физика. – М.: Наука, 1986.
38. Робинсон Ф.Н.Х. Шумы и флуктуации в электронных схемах
и цепях. – М.: Атомиздат, 1980.
39. Розенберг В.Я. Введение в теорию точности измерительных
систем. – М.: Сов. радио, 1975.
40. Романов В.Н. Планирование эксперимента: Учеб. пособие. –
СПб.: СЗПИ, 1992.
41. Романов В.Н. Системный анализ для инженеров. - СПб.: СПб.
гос. университет, 1998.
42.Романов В.Н., Комаров В.В. Анализ и обработка
экспериментальных данных: Учеб. пособие. – СПб.: СЗТУ, 2002.
43. Романов В.Н., Соболев В.С., Цветков Э.И. Интеллектуальные
средства измерений. – М.: РИЦ "Татьянин день", 1994.
44. Соренков Э.И., Телига А.И., Шаталов А.С. Точность
вычислительных
устройств
и
алгоритмов.
–
М.:
Машиностроение, 1976.
45. Справочник по специальным функциям/Под ред. М.
Абрамовица и И. Стиган. – М.: Наука, 1979.
46. Фундаментальные проблемы теории точности/Под ред. В.П.
Булатова, И.Г. Фридлендера. – СПб.: Наука, 2001.
47. Хампель Ф. Робастность в статистике. – М.: Мир, 1989.
48. Хьюбер П. Робастность в статистике. – М.: Мир, 1984.
49. Шляндин В.М. Цифровые измерительные устройства:
Учебник для вузов. – М.: Высшая школа, 1981.
50. Ширман Я.Д., Манжос В.Н. Теория и техника обработки
радиолокационной информации на фоне помех. – М.: Радио и
связь, 1981.
Оглавление
Введение
Глава 1. Общие сведения о погрешностях и способах их
нормирования
1.1. Два подхода к оценке точности: погрешность и
неопределенность
1.2. Нормирование метрологических характеристик средств
измерений
1.3. Погрешность функционирования средств измерений
Глава 2. Естественные пределы измерений
2.1. Область субъективных измерений
2.2. Принцип неопределенности Гейзенберга и ограничения
на точность измерений
2.3. Шумы и причины их появления в измерительных
устройствах
2.4. Фазочувствительные детекторы и усилители
Глава 3. Методы оценки точности средств измерений
3.1. Метрологический анализ
3.2. Метрологический синтез
3.3. Оптимизация динамических характеристик средств
измерений
Глава 4. Повышение точности и помехоустойчивости средств
измерений (СИ)
4.1. Методы повышения точности СИ
4.2. Методы повышения помехоустойчивости СИ
4.3. Статистические методы оценки надежности СИ
Приложения
1. Характеристики случайных процессов
2. Корреляционные функции и спектральные плотности
3. Определение переходной функции системы
4. Типы распределений, используемых при оценке
надежности СИ
5. Примеры решения задач
Литература
3
5
5
11
21
31
31
32
35
48
52
52
71
86
98
98
105
115
122
122
135
144
146
151
157
Романов
Вадим Николаевич
Точность средств измерений
Учебное издание
Редактор И.Н. Садчикова
Сводный темплан 2005 г.
Лицензия ЛР № 020308 от 14.02.97.
Подписано в печать 22.06.05.
Б.Кн.-журн.
Формат
П.л. 9,685
Тираж 150.
Б.л. 4,842
60*84
1/16
РТП РИО СЗТУ
Заказ
______________________________________________________________________
Северо-Западный государственный заочный технический университет
РИО СЗТУ, член Издательско-полиграфической ассоциации
Вузов Санкт-Петербурга
191186, Санкт-Петербург, ул. Миллионная, 5.