Глава 4 Поверхностные интегралы
advertisement

Глава 4
Поверхностные интегралы
В этой главе даны определения поверхностных интегралов, подробно
обсужден их геометрический и физический смысл, а также связи поверхностных интегралов с криволинейными и объемными интегралами.
4.1
Способы задания поверхностей
Прежде чем приступить к изучению поверхностных интегралов, необходимо ознакомиться с основными понятиями, относящимися к поверхностям, и свойствами поверхностей в пространстве. Начнем с математического определения поверхности:
Определение 4.1 Пусть Ω –односвязная замкнутая область в R2 . Годограф непрерывной векторной функции ~r(u, v) : Ω → R3 называют поверхностью.
Различают три основных способа задания поверхности:
1. Векторное задание поверхности
(u, v) ∈ Ω ⊂ R2 .
~r = ~r(u, v) ,
(4.1)
2. Параметрическое задание поверхности
z = x(u, v) ,
(u, v) ∈ Ω ⊂ R2 .
y = y(u, v) ,
z = z(u, v) ,
(4.2)
3. Явное задание поверхности, например
(x, y) ∈ Ω ⊂ R2 .
z = z(x, y) ,
53
(4.3)
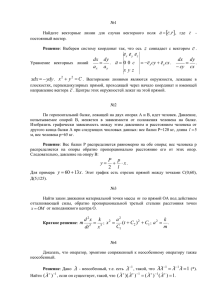
Рис. 4.1: Седлообразная поверхность, заданная явным отображением в R3
квадрата на плоскости {x, y}.
Как и прежде, будем отождествлять фигурирующие в определениях
{x, y, z} с координатами точки в некоторой, наперед заданной, декартовой системе координат. Аналогично, часто удобно трактовать Ω как
область на плоскости, а {u, v} как декартовы координаты точек этой
плоскости.
Примеры: Примером явного задания поверхности S может служить
фрагмент седлообразной поверхности, заданный уравнением
z = 2 + x2 − y 2 ,
x ∈ [−1, 1], y ∈ [−1, 1] ,
и изображенной на рис. 4.1. Пример же поверхности, заданной параметрически, дает кусок сферы, определенный равенствами
x = cos u sin v ,
y = sin u sin v ,
z = cos v ,
u ∈ [0, 2π], v ∈ [0, π/3] ,
и изображенной на рис. 4.2. F
Имея параметрическое или явное задание поверхности, нетрудно перейти к ее векторной форме записи
~r(u, v) = ~i x(u, v) + ~j y(u, v) + ~k z(u, v) ,
или
~r(x, y) = ~i x + ~j y + ~k z(x, y) ,
54
(u, v) ∈ Ω ⊂ R2 ,
(u, v) ∈ Ω ⊂ R2 .
(4.4)
(4.5)
Рис. 4.2: Кусок сферической поверхности, заданной параметрически отображением в R3 квадрата на плоскости {u, v}.
В дальнейшем нам понадобятся еще понятия простой и гладкой поверхностей:
Определение 4.2 Поверхность S называют простой, если задающее
поверхность отображение ~r(u, v) : Ω → R3 взаимно-однозначно.
Отметим геометрический смысл простой поверхности: Из взаимной
однозначности отображения ~r : Ω → R3 следует, что отсутствуют касания и пересечения разных участков поверхности.
Определение 4.3 Простая поверхность S называют гладкой, если она
допускает непрерывно-дифференцируемую параметризацию.
Отличительная геометрическая особенность гладкой поверхности состоит в том, что во всех, не принадлежащих граничным контурам, точках гладкой поверхности имеется единственная касательная плоскость.
Легко проверить, что приведенные выше, в качестве примера, поверхности – простые и гладкие.
4.2
Нормаль и касательная плоскость
Ниже, при определении поверхностных интегралов, важную роль будут играть понятия касательной плоскости и нормали к гладкой поверхности. Поэтому детально обсудим эти понятия.
55
Рис. 4.3: Иллюстрация к определению касательной плоскости и нормали к
поверхности S в точке M0 .
Рассмотрим гладкую поверхность S, заданную векторным уравнением (4.1). Пусть M0 ∈ S точка поверхности, определенная параметрами
{u = u0 , v = v0 } (см. рис. 4.3). Векторные функции ~r(u, v0 ) и ~r(u0 , v),
один из аргументов которых зафиксирован, определяют кривые, принадлежащие поверхности S, и проходящие через точку M0 (так называемые
u-линия ~r(u, v0 ) и v-линия ~r(u0 , v)).
Очевиден геометрический смысл первых частных производных векторной функции ~r(u, v). Производная по u, будем обозначать ее ~ru (u, v),
задает вектор, касательный к u-линии, а ~rv (u, v) –вектор, касательный
к v-линии. Плоскость, в которой лежат оба вектора ~ru (u0 , v0 ) и ~rv (u0 , v0 ),
называют касательной плоскостью к поверхности S в точке M0 . Единичный вектор ~n(M0 ), перпендикулярный этой плоскости и проходящий
через точку M0 , называют нормалью к поверхности S в точке M0 . Поскольку векторное произведение векторов образует новый вектор, перпендикулярный плоскости, в которой лежат сомножители, то
~n(M0 ) k [~ru (u0 , v0 ) × ~ru (u0 , v0 )] .
Поделив вектор справа на его модуль (длину), получим выражение для
вектора нормали к гладкой поверхности
~n(M ) = ±
[~ru × ~rv ]
.
| [~ru × ~rv ]|
(4.6)
Здесь M0 заменена произвольной точкой поверхности M , и добавлен
знак ±, означающий, что в каждой точке гладкой поверхности есть два,
противоположно направленных, вектора нормали. Способы выбора “правильного” направления вектора нормали обсудим позже, а пока, для
определенности, возьмем в (4.6) знак плюс.
56
Обратим внимание на универсальность выражения (4.6) для вектора нормали: Оно “не привязано” к определенной системе координат, и
нуждается лишь в “центральной” точке O, из которой испускаются, в
точки поверхности S, радиус-векторы ~r(u, v). Если же поверхность задана в некоторой, например декартовой, системе координат {x, y, z}, то
ясный геометрический смысл приобретают компоненты вектора нормали. Это направляющие косинусы – косинусы углов наклона нормали к
осям координат:
~n(~r) = {cos α, cos β, cos γ} .
(4.7)
Здесь
c
α = ~n~i ,
d
β = ~n ~j ,
d
γ = ~n ~k ,
(4.8)
углы между нормалью ~n и осями координат. Угол γ между нормалью
и осью z показан на рис. 4.1. Косинусы углов (4.8) равны скалярным
произведениям вектора ~n и ортов {~i, ~j, ~k} осей декартовой системы координат:
cos α = (~n · ~i) ,
cos β = (~n · ~j) ,
cos γ = (~n · ~k) .
Пусть, например, поверхность S задана равенством (4.4). Тогда
¯
¯ ~i
¯
¯
[~ru × ~rv ] = ¯ xu
¯
¯ xv
где
¯
¯y
¯
A=¯ u
¯ yv
¯
zu ¯¯
¯ ,
zv ¯
¯
~j ~k ¯¯
¯
yu zu ¯¯ = ~i A + ~j B + ~k C ,
yv zv ¯
¯
¯z
¯
B=¯ u
¯ zv
¯
xu ¯¯
¯ ,
xv ¯
¯
¯x
¯
C=¯ u
¯ xv
(4.9)
¯
yu ¯¯
¯.
yv ¯
(4.10)
При этом модуль вектора [~ru × ~rv ] и направляющие косинусы равны
√
| [~ru × ~rv ]| = A2 + B 2 + C 2 ,
cos α = √
A2
A
B
,
cos β = √ 2
,
2
2
+B +C
A + B2 + C 2
C
.
cos γ = √ 2
A + B2 + C 2
(4.11)
Еще более простые выражения для направляющих косинусов нормали получим в случае явного задания поверхности z = z(x, y). В этом
случае роль u и v играют координаты x и y, а векторное произведение
касательных к поверхности векторов равно
¯
¯ ~i ~j
¯
¯
[~rx × ~ry ] = ¯¯ 1 0
¯0 1
¯
~k ¯¯
¯
zx ¯¯ = −~i zx − ~j zy + ~k .
zy ¯
57
(4.12)
Соответственно, искомый модуль векторного произведения и направляющие косинусы нормали таковы
q
| [~rx × ~ry ]| =
zx
,
cos α = − q
1 + zx2 + zy2
1 + zx2 + zy2 ,
zy
cos β = − q
1 + zx2 + zy2
1
cos γ = q
1 + zx2 + zy2
,
(4.13)
.
Заметим еще, что из (4.13) вытекают еще два полезных соотношения,
раскрывающие связь между частными производными функции z(x, y) и
направляющими косинусами:
∂z
cos α
≡ zx = −
,
∂x
cos γ
∂z
cos β
≡ zy = −
.
∂y
cos γ
(4.14)
Приведем, в заключение, уравнение касательной плоскости к поверхности S в точке M0 :
(~
ρ − ~r0 · [~ru × ~rv ]) = 0 .
(4.15)
Здесь ~r0 –радиус-вектор точки касания, а ρ~ –радиус-вектор произвольной
точки касательной плоскости. Если поверхность задана явно, то радиусвектор текущей точки поверхности равен (4.5), а уравнение касательной
плоскости сводится к равенству нулю определителя
¯
¯x − x
0
¯
(~
ρ − ~r0 · [~rx × ~ry ]) = ¯¯ 1
¯
¯ 0
¯
y − y0 z − z0 ¯¯
0
zx ¯¯ = 0 .
¯
1
zy ¯
Раскрыв определитель, получим окончательно
z − z0 =
∂z
∂z
(x − x0 ) +
(y − y0 ) .
∂x
∂y
(4.16)
Иногда поверхность задают неявным уравнением F (x, y, z) = 0. Найдем уравнение касательной плоскости в этом случае. Напомним, что входящие в уравнение (4.16) частные производные можно найти, дифференцируя по x и y тождество
F ((x, y, z(x, y)) ≡ 0 .
Это дает:
Fx + Fz
∂z
∂z
= 0 , F y + Fz
= 0.
∂x
∂y
58
Отсюда имеем
∂z
Fx
=− ,
∂x
Fz
∂z
Fy
=− .
∂y
Fz
Отсюда и из (4.16) находим окончательно
∂F
∂F
∂F
(x − x0 ) +
(y − y0 ) +
(z − z0 ) = 0 .
∂x
∂y
∂z
(4.17)
Здесь все частные производные берутся в точке с координатами {x0 , y0 , z0 },
a z0 определяется уравнением F (x0 , y0 , z0 ) = 0.
4.3
Длина кривой на поверхности
Обсудим еще одну полезную задачу. Найдем длину кривой C, лежащей на поверхности S. Если C задана векторным уравнением ~r = ~r(u, v),
то любую гладкую кривую, принадлежащую поверхности, можно записать в виде
~r = ~r(u(`), v(`)) ,
где u(`) и v(`) непрерывно-дифференцируемые функции естественного
параметра ` –длины кривой, отсчитанной от некоторой, наперед заданной, точки. Очевидно, вектор ~r` касается поверхности S и имеет единичную длину, то есть
Ã
d~r d~r
·
d` d`
!
=1
⇒
d~r2 = d`2 .
С другой стороны, дифференциал вектора ~r(u, v) можно представить как
линейную комбинацию, касательных к поверхности S, векторов ~ru и ~rv :
d~r = ~ru du + ~rv dv .
Следовательно
d~r 2 = d` 2 = (~ru du + ~rv dv · ~ru du + ~rv dv) ,
или
d` 2 = g11 du2 + 2g12 dudv + g22 dv 2 .
(4.18)
Здесь обозначено
g11 = ~ru2 ,
g11 = (~ru · ~ru ) ,
59
g11 = ~rv2 .
(4.19)
Выражение в правой части равенства (4.18) представляет собой положительно определенную квадратичную форму относительно переменных du
и dv. Ее называют 1-й квадратичной формой поверхности. Коэффициенты (4.19) 1-й квадратичной формы в общем случае зависят от точки
поверхности (и, естественно, от способа параметризации поверхности).
Выразим с помощью 1-й квадратичной формы длину любой гладкой
кривой на поверхности. Пусть кривая задана параметрически
~r = ~r(u, v) ,
u = u(t) ,
v = v(t) ,
t ∈ [τ, T ] .
Производная по t радиус-вектора кривой равен
¯ ¯
¯ d~
¯
¯ r¯
¯ ¯=
¯ dt ¯
или
vÃ
!
u
u d~
r d~r
t
·
=
dt
¯ ¯
¯ d~
¯
¯ r¯
¯ ¯=
¯ dt ¯
dt
v
u
u
t
Ã
g11
du
dt
vÃ
!
u
u
du
dv
du
dv
t ~
ru
+ ~rv
· ~ru
+ ~rv
dt
!2
dt
dt
Ã
du dv
dv
+ 2g12
+ g22
dt dt
dt
dt
!2
Подставив это выражение в (3.4), получим окончательно
L[C ] =
v
ZT u
u
t
g11
τ
4.4
Ã
du
dt
!2
Ã
du dv
dv
+ 2g12
+ g22
dt dt
dt
!2
dt .
(4.20)
Площадь гладкой поверхности
Следующая важная задача, решение которой поможет в дальнейшем
определить понятия поверхностных интегралов: вычисление площади
гладкой поверхности. Дадим вначале несколько определений.
Определение 4.4 Назовем диаметром d(S) поверхности S диаметр
наименьшей сферы, описанной вокруг поверхности.
Определим теперь собственно площадь поверхности:
Определение 4.5 Пусть S –гладкая поверхность, ограниченная кусочногладким контуром. Разобьем S, с помощью кусочно-гладких кривых, на
куски
S=
N
[
i=1
60
Si .
Выберем на каждом куске Si поверхности S произвольную точку Mi
(см. рис. 4.4) и спроектируем Si на касательную плоскость, проходящую через точку Mi . Пусть площадь проекции Sik на касательную плоскость куска поверхности Si равна %[Sik ]. Площадью %[S] поверхности S
назовем предел суммы площадей указанных плоских поверхностей при
условии, что максимальный диаметр кусков Si поверхности S стремится к нулю:
%[S] =
lim
max d(Si )→0
N
X
%[Sik ] .
i=1
Сформулируем и докажем теорему, сводящую вычисление площади
поверхности к вычислению двойного интеграла:
Теорема 4.1
Пусть гладкая поверхность S, ограниченная кусочно-гладким контуром,
задана уравнением
(u, v) ∈ Ω ⊂ R2 ,
~r = ~r(u, v) ,
где ~r(u, v) непрерывно-дифференцируемая на Ω функция, а площадь
квадрируемой области Ω на плоскости R2 ограничена:
ZZ
%[Ω] =
dudv < ∞ .
Ω
Тогда площадь поверхности S вычисляется по формуле
ZZ
%[S] =
| [~ru × ~rv ]| dudv .
(4.21)
Ω
Доказательство: Разобьем поверхность S кусочно-гладкими кривыми на куски Si . Выберем точки Mi и проведем касательные плоскости,
касающиеся поверхности S в этих точках. В каждой точке Mi выберем
местную декартову систему координат, приняв за плоскость (x, y) касательную в точке Mi плоскость, а ось z пустим по направлению нормали
к поверхности в точке Mi . Тогда уравнение куска поверхности Si можно
записать в виде
x = x(u, v) ,
y = y(u, v) ,
z = z(u, v) ,
(u, v) ∈ Ωi ⊂ Ω ,
где область Ωi определяет интересующую нас часть Si поверхности S.
При этом проекция поверхности Si на касательную плоскость, проходящую через точку Mi , задается уравнениями
x = x(u, v) ,
y = y(u, v) ,
61
z = 0,
(u, v) ∈ Ωi ,
осуществляющими отображение области Sik плоскости (x, y) на область
Ωi плоскости (u, v).
Пользуясь формулой замены переменных в двойном интеграле, запишем площадь области ⊗ki в виде
ZZ
%[ Sik ]
=
Sik
¯
ZZ ¯¯
¯
¯ ∂(x, y) ¯
¯ dudv .
dxdy =
¯
¯ ∂(u, v) ¯
Ωi
Здесь фигурирует якобиан перехода от переменных (u, v) к переменным
(x, y)
¯
¯
∂(x, y) ¯¯ xu xv ¯¯
=¯
¯.
∂(u, v) ¯ yu yv ¯
Он тесно связан с векторным произведением касательных к поверхности S векторов. Действительно, упомянутое векторное произведение, в
указанной выше декартовой системе координат (x, y, z), равно
¯
¯ ~i
¯
[ ~ru × ~rv ] = ¯¯ xu
¯
¯ xv
¯
¯
¯
~j ~j ¯¯
¯x
¯
∂(x, y) ~
x
¯
¯
u
v¯
k.
¯=
yu 0¯¯ = ~k ¯¯
¯
yu yv
∂(u, v)
¯
yv 0
Следовательно
¯
¯
¯ ∂(x, y) ¯
¯
¯
| [ ~ru × ~rv ]| = ¯
¯
¯ ∂(u, v) ¯
ZZ
%[ Sik ] =
⇒
| [ ~ru × ~rv ]| dudv .
Ωi
Отсюда, и в силу непрерывности векторного произведения [ ~ru × ~rv ], имеем
³
´
%[ Sik ] = | [ ~ru × ~rv ]|ui ,vi + αi %[Ωi ] .
Здесь (ui , vi ) ∈ Ωi , а %[ Ωi ] –площадь области Ωi . Кроме того
max αi → 0 и
max d(Ωi ) → 0 при
max d(Si ) → 0 .
Таким образом, сумма площадей всех проекций Sik на соответствующие
касательные плоскости равна
N
X
%[ Sik ] =
i=1
N
X
i=1
| [ ~ru × ~rv ]|ui ,vi %[Ωi ] +
N
X
αi %[Ωi ] .
i=1
Модуль последней суммы
¯
¯
N
¯X
¯
¯
¯
¯
α
%[Ω
]
i
i ¯ 6 max |αi | %[Ω] → 0
¯
¯
i=1
62
стремится к нулю при max d(Si ) → 0. Это означает, что
%[S] =
N
X
lim
max d(Si )→0
%[Sik ]
=
ZZ
i=1
=
lim
max d(Ωi )→0
N
X
i=1
| [ ~ru × ~rv ]|ui ,vi %[Ωi ] =
| [~ru × ~rv ]| dudv .
Ω
Теорема доказана. ¤
4.5
Поверхностный интеграл 1-го типа
Мы готовы к тому, чтобы дать определение поверхностного интеграла
1-го типа:
Определение 4.6 Пусть во всех точках поверхности S определена
ограниченная функция f (M ), M ∈ S. Разобьем поверхность S кусочногладкими кривыми на N кусков {S1 , S2 , . . . , SN }. Обозначим через %[ Si ]
площади кусков поверхности, и выберем в каждом из них произвольную
точку Mi ∈ Si . Рассмотрим предел
N
X
lim
max d(Si )→0
f (Mi ) %[Si ] .
i=1
Если этот предел существует, то его называют поверхностным интегралом 1-го типа и обозначают
ZZ
f (M ) dS .
S
Незначительные модификации доказательства теоремы о вычисления
площади гладкой поверхности с помощью двойного интеграла, позволяют доказать теорему:
Теорема 4.2
Если S –гладкая поверхность, заданная уравнением ~r = ~r(u, v), и f (~r) –
непрерывная функция на поверхности S, то вычисление поверхностного
интеграла 1-го типа сводится к вычислению двойного интеграла
ZZ
ZZ
f (~r) dS =
S
f (~r(u, v)) | [~ru × ~rv ]| dudv .
Ω
63
(4.22)
Приведем еще одну, эквивалентную (4.22), форму, сводящую вычисление криволинейного интеграла 1-го типа к двойному интегралу
ZZ
ZZ
2
f (~r(u, v)) g11 g22 − g12
dudv ,
f (~r) dS =
S
q
(4.23)
Ω
где gij –коэффициенты (4.19) 1-й квадратичной формы поверхности (4.18).
Убедимся в справедливости формулы (4.23), вспомнив геометрический
смысл модуля векторного произведения: Он равен площади параллелограмма, построенного на перемножаемых векторах:
| [~ru × ~rv ]| = |~ru | | |~rv | | sin(~rd
rv )| =
u~
q
q
√
|~ru | | |~rv | 1 − cos2 (~rd
rv ) = ~ru2 ~rv2 − (~ru · ~rv )2 = g11 g22 − g12 .
u~
Формулы (4.22), (4.23) справедливы в любой системе координат. Если же задана декартова система координат, то пользуются следующим
налогом теоремы 4.2:
Теорема 4.3
Если S –гладкая поверхность, заданная уравнением
~r(u, v) = ~i x(u, v) + ~j y(u, v) + ~k z(u, v) ,
и f (x, y, z) –непрерывная функция на поверхности S, то вычисление поверхностного интеграла 1-го типа сводится к вычислению двойного интеграла по формуле
ZZ
ZZ
f (x, y, z) dS =
S
f (x(u, v), y(u, v), z(u, v)) | [~ru × ~rv ]| dudv .
(4.24)
Ω
Подставив в (4.24) выражение (4.11) для модуля векторного произведения, придем к следующей рабочей формуле вычисления криволинейного интеграла 1-го типа
ZZ
ZZ
f (x, y, z) dS =
S
√
f (x(u, v), y(u, v), z(u, v)) A2 + B 2 + C 2 dudv .
Ω
(4.25)
Наконец, если поверхность задана в явном виде: z = z(x, y), то, согласно (4.13), поверхностный интеграл 1-го типа равен
ZZ
ZZ
S
q
f (x, y, z(x, y)) 1 + zx2 + zy2 dxdy .
f (x, y, z) dS =
Ω
64
(4.26)
Заметим, что
dS =
q
1 + zx2 + zy2 dxdy =
dxdy
,
| cos γ|
(4.27)
где dS площадь участка поверхности S, спроектированного в прямоугольник dxdy плоскости {x, y}. Соответственно, равенство (4.26) может
быть переписано в геометрически более наглядной форме
ZZ
ZZ
f (x, y, z) dS =
S
f (x, y, z(x, y))
Ω
dxdy
.
| cos γ|
(4.28)
Знак модуль в формулах (4.27), (4.28) поставлен для общности, чтобы
эти формулы были справедливы при любом выборе нормали к поверхности.
4.6
Физические приложения поверхностного
интеграла 1-го типа
Выше мы обсудили понятие поверхностных интегралов 1-го типа, оперируя преимущественно геометрическими категориями. Однако для лучшего понимания сути поверхностных интегралов имеет смысл взглянуть
на них еще и с физической точки зрения. Поэтому мы продолжим обсуждение подобных интегралов, отталкиваясь от физических задач, к
ним приводящих.
Поверхностные интегралы 1-го типа находят широкое применение
практически во всех разделах физики. Необходимость их вычисления
диктуется потребностью отыскания интегральных свойств материальных поверхностей, вдоль которых распределена масса вещества, электрический заряд, задана теплоемкость или другие, меняющиеся от точки к точке, физические параметры поверхности. Перечисленные и иные
физические свойства материальной поверхности как единого целого математически выражаются в форме поверхностных интегралов.
Поскольку трудно осветить все, поистине необозримые, возможности
использования в физике поверхностного интеграла 1-го типа, ограничимся здесь лишь тем, что укажем некоторые его механические применения.
Напомним прежде всего, что если на всей поверхности S известна
ее поверхностная плотность %(~r), то полная масса вещества поверхности
выражается поверхностным интегралом:
ZZ
m=
%(~r) dS .
S
65
Другой важной механической характеристикой материальной поверхности служит момент массы
T~ =
ZZ
% ~r dS .
S
Поделив последний на общую массу m (4.6), получим центр масс поверхности:
1 ~
~rc =
T.
m
Он важен при изучении движения тел: Центр масс всякого тела, в том
числе и материальной поверхности, движется так, как если бы все внешние силы, действующие на тело, были приложены к центру масс. Если
в пространстве задана декартова система координат (x, y, z), то вектор
центра масс определяется своими проекциями на оси координат:
1 ZZ
1 ZZ
xc =
x%(x, y, z) dS , yc =
y%(x, y, z) dS ,
m
m
S
S
1 ZZ
z%(x, y, z) dS .
zc =
m
S
При описании вращательной способности материальной поверхности вокруг некоторой оси необходимо знать момент инерции поверхности относительно данной оси. Обозначим за r⊥ (M ) расстояние точки M поверхности до указанной оси. Тогда момент инерции материальной поверхности выражается поверхностным интегралом:
ZZ
2
r⊥
(~r) %(~r) dS .
J=
S
Ценность понятия момента инерции для механики объясняется его связью с энергией вращения. Кинетическая энергия тела, вращающегося вокруг некоторой оси, равна половине момента инерции относительно этой
оси, умноженной на квадрат угловой скорости ω вращения: K = Jω 2 /2.
4.7
Поверхностный интеграл 2-го типа
Основательно освоившись с поверхностными интегралами 1-го типа,
перейдем ко второму типу поверхностных интегралов, играющих в физических приложениях еще более заметную роль, чем поверхностные интегралы 1-го типа. Это связано с тем, что поверхностные интегралы 2-го
66
Рис. 4.4: Пример двусторонней поверхности. Изображен также внутренний
контур и вектор нормали, испущенный из точки выбранной стороны поверхности.
типа приспособлены для вычисления потоков самых разнообразных физических величин – потоков тепла, жидкости, электромагнитных полей
– через участки поверхностей.
При определении потока, а вместе с ним и поверхностного интеграла
2-го типа, принципиальную роль играет понятие стороны поверхности,
сквозь которую направлен поток. Поэтому прежде всего выясним, что
подразумевают под стороной поверхности. Напомним, в каждой внутренней (не принадлежащей границе) точке гладкой поверхности можно указать два направления, перпендикулярные поверхности в данной
точке. Выделив одно из них – испустив единичный вектор нормали ~n в
заданном направлении – определяют сторону поверхности в указанной
точке. Как правило, задание стороны гладкой поверхности в одной ее
точке автоматически выделяет сторону всей поверхности. Для этого по
поверхности проводят кривую, соединяющую исходную точку с произвольной точкой поверхности, и движутся от исходной к искомой точке,
непрерывно перестраивая направление нормали к точкам кривой (см.,
рис. 4.5).
Оказывается однако, что описанная процедура позволяет однозначно
указать сторону – совокупность всех точек поверхности с приписанными им упомянутым способом направлениями вектора нормали, лишь в
случае двусторонней поверхности.
Определение 4.7 Гладкую поверхность S называют двусторонней, если обход по любому замкнутому контуру, лежащему на поверхности
67
Рис. 4.5: Лист Мебиуса. Видно, что если пойти поперек линий вдоль листа,
отслеживая непрерывное изменение вектора нормали, то при возвращении в
исходную точку направление нормали сменится на противоположное.
S и не имеющему общих точек с ее границей, не меняет направление
нормали к поверхности.
При работе с двусторонними поверхностями надо четко различать, о
какой стороне поверхности идет речь. Поэтому дадим определение стороны поверхности:
Определение 4.8 Совокупность всех точек двусторонней поверхности S, с приписанным в них, по указанному выше правилу, направлением нормали, назовем стороной поверхности и обозначим (M, ~n(M )),
M ∈ S. В этих обозначениях (M, −~n(M )), M ∈ S –другая сторона поверхности.
Иногда, для краткости, чтобы различать стороны некоторой гладкой
двусторонней поверхности S, будем обозначать за S + ту ее сторону, из
которой испущен единичный вектор нормали ~n.
Большинство встречающихся поверхностей –двусторонние. Однако
существуют и односторонние поверхности. Так называют поверхности,
где имеется хотя бы один замкнутый контур, при обходе которого направление нормали меняется на противоположное. Примером односторонней поверхности служит знаменитый лист Мебиуса, изображенный
на рис. 4.6. Его можно получить, склеив два конца плоской ленточки,
предварительно повернув один из них на 180 градусов.
Теперь мы готовы дать определение поверхностного интеграла 2-го
типа:
68
Определение 4.9 Пусть дана двусторонняя поверхность S, выбрана
одна из ее сторон, и ~n(M ), M ∈ S –нормаль выбранной стороны. Пусть
~ : S → R3 . Образуем
далее задана ограниченная векторная функция A
скалярную функцию f (M ), равную скалярному произведению
³
´
~ ) · ~n(M ) ,
f (M ) = A(M
M ∈S.
Поверхностный интеграл 1-го типа от указанного выше скалярного
произведения
ZZ
ZZ ³
´
~ ) · ~n(M ) dS
f (M ) dS =
A(M
(4.29)
S
S
называют поверхностным интегралом 2-го типа от векторного поля
~
A.
Добавим, что физики называют этот интеграл потоком векторного
~ через данную поверхность. Подчеркнем еще, что при переходе к
поля A
другой стороне поверхности (от S + к S − ), поверхностный интеграл 2-го
типа меняет знак на обратный.
Если в пространстве R3 , с помощью ортонормированного базиса {~i, ~j, ~k},
введена декартова система координат, то входящие в выражение (4.29)
для поверхностного интеграла 2-го типа векторные функции записывают
в виде разложения по базису {~i, ~j, ~k}:
~ ) = ~i P (x, y, z) + ~j Q(x, y, z) + ~k R(x, y, z) ,
A(M
~n(M ) = ~i cos α + ~j cos β + ~k cos γ .
(4.30)
Соответственно, поверхностный интеграл 2-го типа принимает вид
ZZ ³
S
´
~ ) · ~n(M ) dS =
A(M
ZZ
ZZ
(P cos α + Q cos β + R cos γ) dS =
S
(4.31)
P dydz + Q dzdx + R dxdy .
S
Здесь dydz, dzdx и dxdy символизируют площади проекций элемента
поверхности dS на координатные плоскости yz, zx и xy:
cos α dS = dydz ,
cos β dS = dzdx ,
cos α dS = dxdy .
Очевидно, как и в случае поверхностного интеграла 1-го типа, вычисление поверхностного интеграла 2-го типа сводится к вычислению
двойного интеграла. Вид его устанавливает
69
Теорема 4.4
Пусть двусторонняя поверхность S имеет гладкую параметризацию
{u, v} ∈ Ω ⊂ R2 ,
~r = ~r(u, v) ,
~ r) непрерывна на поверхности S. Тогда имеет место равена функция A(~
ство
ZZ ³
ZZ ³
´
´
~ · ~n dS =
~ ~ru , ~rv dudv ,
A
A,
(4.32)
S
Ω
где векторы ~ru , ~rv и ~n образуют правую тройку (для правой системы
координат).
Прежде чем заняться доказательством данной теоремы, заметим, что
в правую часть равенства (4.32) вошло смешанное произведение трех векторов, равное, по определению, скалярному произведению 1-го вектора
с векторным произведением двух оставшихся векторов:
(~a, ~b, ~c) ≡ (~a · [~b × ~c]) .
(4.33)
Напомним геометрический смысл смешанного произведения: Его модуль
равен объему параллелепипеда, построенного на указанных трех векторах. При этом смешанное произведение положительно, если входящие в
него векторы образуют правую тройку. Добавим еще, что при циклической перестановке перемножаемых векторов смешанное произведение не
меняется. После этой справки приступим к доказательству сформулированной выше теоремы:
Доказательство: Если касательные к поверхности векторы ~ru , ~rv
образуют правую тройку с вектором нормали ~n к выбранной стороне
поверхности, то вектор нормали задается равенством
~n(M ) =
[~ru × ~rv ]
.
| [~ru × ~rv ]|
Подставив его в (4.29), а затем вспоминая формулу (4.22) вычисления
поверхностного интеграла 1-го типа, будем иметь
ZZ ³
S
´
~ · ~n dS =
A
ZZ Ã
Ω
!
~ · [~ru × ~rv ] | [~ru × ~rv ]| dudv .
A
| [~ru × ~rv ]|
Отсюда, после сокращения модуля векторного произведения в числителе
и знаменателе, и с учетом определения смешанного произведения (4.33),
приходим к формуле (4.32). ¤
70
Общее соотношение (4.32) служит достаточно эффективным инструментом вычисления поверхностных интегралов 2-го типа. Однако оно
обладает существенным недостатком, характерным для многих общих
формул – отображение поверхности S на некую абстрактную плоскость
параметров {u, v} лишает формулу (4.32) геометрической наглядности.
Гораздо более наглядные и простые в обращении формулы возникают,
если поверхность удается спроектировать на координатные плоскости.
~ (4.30), заданного в деПроиллюстрируем сказанное на примере поля A
картовой системе координат. Кроме того примем для простоты, что поверхность S однозначно проектируется на плоские области Ωyz , Ωzx и
Ωxy трех соответствующих координатных плоскостей. Тогда вычисление
поверхностного интеграла 2-го типа разбивается, согласно (4.31), на три
двойных интеграла
ZZ ³
´
~ r) · ~n dS = ±
A(~
ZZ
ZZ
Ωyz
S
ZZ
P dydz ±
Q dzdx ±
Ωzx
Z dxdy ,
Ωxy
где знак плюс или минус выбирается в зависимости от того, острый или
тупой угол образует вектор нормали ~n с ортом декартовой системы координат, перпендикулярным соответствующей координатной плоскости.
Подробнее обсудим случай поверхностного интеграла от векторного
поля, ориентированного вдоль оси z:
~ = ~k R(x, y, z) ,
R
по поверхности, заданной в явной форме z = z(x, y).
Заметим прежде всего, что в данном случае уместно называть разные стороны поверхности – верхней и нижней сторонами. Верхней стороной S + назовем ту, вектор нормали к которой образует с осью z острый
угол γ. Соответственно, косинус этого угла больше нуля. Напротив, для
нижней стороны S − : cos γ < 0. Выбрав в качестве аргументов {u, v} координаты {x, y} точек плоскости z = 0, и вспомнив связь (4.27) между
площадью элементарной площадки поверхности S и площадью dxdy ее
проекции на плоскость z = 0, получим
ZZ
~ · ~n )dS =
(R
S
ZZ
ZZ
R cos γ dS =
R
σ
S
cos γ
dxdy
| cos γ|
или окончательно
ZZ
S±
~ · ~n )dS = ±
(R
ZZ
R(x, y, z(x, y)) dxdy .
Ωxy
71
Здесь предполагается, что заданная поверхность S взаимно-однозначно
проектируется на область Ωxy плоскости z = 0.
Иногда интегрируемая поверхность может быть разбита на несколько
кусков, каждый из которых, с помощью своего уравнения z = zm (x, y),
взаимно-однозначно проектируется на некоторую область Ωm
xy плоскости
z = 0. Тогда имеет место формула
ZZ
~ · ~n )dS =
(R
X
ZZ
m
S
R(x, y, zm (x, y)) dxdy ,
δm
Ωm
xy
где суммирование производится по всем упомянутым кускам поверхности S, а δm равно 1, если интегрирование ведется по верхней стороне
m-го куска, и −1, если по нижней его стороне. Аналогичные соотношения справедливы и для поверхностных интегралов 2-го типа по другим,
~ (4.30), компонентам P~ = ~i P , Q
~ = ~j Q.
составляющим векторное поле A
В заключение дадим еще одну рабочую формулу, справедливую при
явном задании z = z(x, y) поверхности S, взаимно-однозначно проектирующейся на область Ωxy плоскости (x, y). Используя явные выражения
для направляющих косинусов нормали (4.13), будем иметь
ZZ ³
S±
´
~ · ~n dS = ∓
A
ZZ
(P zx + Q zy − R) dxdy .
Ωxy
72
Глава 5
Интегральные формулы
векторного анализа
Выше мы обсудили поверхностные интегралы, и способы их вычисления, основанные на формулах, сводящих поверхностные интегралы к
двойным интегралам. Имеются еще ключевые формулы векторного анализа, выражающие криволинейные интегралы по замкнутым кривым через поверхностные интегралы, а поверхностные интегралы по замкнутым
поверхностям через объемные интегралы. В этой главе мы выведем и обсудим эти, и некоторые другие, полезные для приложений, интегральные
формулы.
5.1
Формула Гаусса-Остроградского
Обсудим прежде всего формулу Гаусса-Остроградского, сводящую поверхностные интегралы по замкнутым поверхностям (см., например, рис. 5.1)
к объемным интегралам по трехмерным областям, заключенным внутри
поверхности. Она дает гибкий инструмент анализа, позволяющий формулировать проблемы поверхностных интегралов на языке интегралов
объемных и наоборот.
Формула Гаусса-Остроградского выражает универсальные связи между скалярными и векторными функциями, и может быть записана в виде,
не использующем конкретную координатную систему. Однако вначале
удобнее сформулировать и доказать ее, опираясь на декартову систему
координат:
Теорема 5.1
Пусть область T ⊂ R3 ограничена кусочно-гладкой двусторонней поверхностью S, и ~n –нормаль к внешней стороне поверхности, компонентами
73
Рис. 5.1: Замкнутая поверхность и ее внешняя нормаль.
которой служат направляющие косинусы ~n = {cos α, cos β, cos γ}. Пусть,
~ векторное поле
кроме того, A
~ ) = ~i P (x, y, z) + ~j Q(x, y, z) + ~k R(x, y, z) ,
A(M
компоненты которого непрерывны T = T +S и непрерывно-дифференцируемы
в T . Тогда справедлива формула Гаусса-Остроградского
ZZZ Ã
ZZ
(P cos α + Q cos β + R cos γ) dS =
S
T
∂P
∂Q ∂R
+
+
∂x
∂y
∂z
!
dT
(5.1)
Опуская строгое доказательство данной теоремы, приведем наглядные рассуждения, приводящие к формуле (5.1).
Прежде всего введем понятие z-цилиндрической области, ограниченной снизу и сверху кусочно гладкими поверхностями
S1 : z = z1 (x, y) ,
S2 : z = z2 (x, y) ,
(z1 < z2 ) ,
а сбоку –цилиндрической поверхностью S3 с образующими, параллельными оси z. Типичный график z-цилиндрической области изображен на
рис. 5.2. Аналогично вводятся x-цилиндрические и y-цилиндрические области:
Определение 5.1 Назовем некоторую область T простой, если ее удается разбить как на конечное число z-цилиндрической областей, так и
на конечное число x и y-цилиндрических областей.
Рассмотрим, для определенности, z-цилиндрическую область T , ограниченную поверхностью S = S1 + S2 + S3 , состоящей из “дна” S1 , “крышки” S2 и боковой цилиндрической поверхности S3 . Возьмем функцию
74
R(x, y, z), непрерывную, вместе со своей частной производной по z, во
всей области T , и рассмотрим очевидное равенство
z2Z(x,y)
z1 (x,y)
∂R
dz = R(x, y, z2 (x, y)) − R(x, y, z1 (x, y)) .
∂z
Проинтегрируем обе части этого равенства по плоской области Ω –проекции
трехмерной области T на плоскость {x, y}. При этом интеграл слева превратится в тройной, а справа будут стоять двойные интегралы:
ZZZ
T
ZZ
ZZ
∂R
dV =
R(x, y, z2 (x, y)) dxdy −
R(x, y, z1 (x, y)) dxdy . (5.2)
∂z
Ω
Ω
~ 3 = ~k R. С его помощью первый инВведем вспомогательный вектор A
теграл справа в (5.2) можно записать в виде поверхностного интеграла
2-го типа:
ZZ
ZZ
R(x, y, z2 (x, y)) dxdy =
Ω
R cos γ dS =
S2
ZZ ³
´
~ 3 · ~n dS ,
A
S2
где ~n -вектор внешней нормали к верхней части поверхности S, образующий острый угол с осью z.
С помощью аналогичных рассуждений, для второго интеграла справа
в (5.2) имеем
ZZ
R(x, y, z2 (x, y)) dxdy = −
Ω
ZZ ³
´
~ 3 · ~n dS .
A
S1
Знак минус здесь появился из-за того, что внешняя нормаль к нижней
части поверхности образует тупой угол с осью z, а косинус этого угла
отрицателен. Поэтому равенство (5.2) можно представить в форме
ZZZ
T
ZZ ³
ZZ ³
´
´
∂R
~ 3 · ~n dS +
~ 3 · ~n dS .
dV =
A
A
∂z
S2
S1
Заметив еще, что что поверхностный интеграл по боковой поверхности
z-цилиндрической области равен нулю:
ZZ ³
´
~ 3 · ~n dS ≡ 0 ,
A
S1
75
поскольку вектор нормали к боковой поверхности всюду перпендикулярен оси z (~n ⊥ ~k), получим окончательно
ZZZ
T
ZZ ³
´
∂R
~ 3 · ~n dS .
dV =
A
∂z
(5.3)
S
Последнее равенство справедливо и для любой области T , которая разбивается на конечное число z-цилиндрических областей. Действительно,
если разбить T внутренними поверхностями на непересекающиеся области, применить к каждой из них равенство (5.3), и все их сложить,
то по каждой из секущих поверхностей поверхностный интеграл будет
браться дважды – по их разным сторонам. Подобные пары поверхностных интегралов взаимно уничтожаются, а остаются лишь интегралы по
поверхностям, в сумме составляющим внешнюю поверхность S области
T . В итоге мы вновь возвращаемся к равенству (5.3).
Пусть теперь область T –цилиндрическая вдоль оси x, или разбивается на конечное число таких x-цилиндрических областей, а функция
P (x, y, z) непрерывная, вместе со своей частной производной по x, всюду
в T . Тогда, очевидно, справедлива следующая, аналогичная (5.3), формула:
ZZZ
ZZ ³
´
∂P
~ 1 · ~n dS ,
A
(5.4)
dV =
∂x
T
S
~ 1 = ~i P . Наконец выпишем еще одно
где введен вспомогательный вектор A
аналогичное равенство для областей, разбиваемых на конечное число yцилиндрических областей
ZZZ
T
ZZ ³
´
∂Q
~ 2 · ~n dS .
dV =
A
∂y
(5.5)
S
~ 2 = ~j Q.
Здесь фигурирует вектор A
Складывая равенства (5.3)-(5.5), придем к к окончательной формуле
ZZZ Ã
T
∂Q ∂R
∂P
+
+
∂x
∂y
∂z
!
dV =
ZZ ³
´
~ · ~n dS ,
A
(5.6)
S
справедливой для любой области T , разбиваемой на конечное число x,
y и z-цилиндрических областей. В (5.6) использовано уже знакомое обозначение
~=A
~1 + A
~2 + A
~ 3 = ~i P (x, y, z) + ~j Q(x, y, z) + ~k R(x, y, z) .
A
76
Поменяв части равенства (5.6) местами, и вспомнив одну из форм записи
(4.31) поверхностного интеграла 2-го типа в декартовой системе координат, убедимся в эквивалентности равенств (5.1) и (5.6).
Сделаем пару замечаний по поводу формулы Гаусса-Остроградского
(5.1), (5.6):
Замечание 1: Формулу Гаусса-Остроградского можно доказать не
только для простых, но и других областей, ограниченных конечным числом кусочно-гладких поверхностей. 4
Замечание 2: В отличие от равенства (5.1), поверхностный интеграл
в (5.6) записан в форме, не связанной с той или иной системой координат. Забегая немного вперед, заметим, что и подынтегральное выражение в объемном интеграле можно записать в независящей от системы
~
координат форме, используя понятие дивергенции векторного поля A.
По определению, это скалярная функция, обозначение которого и способ вычисления в декартовой системе координат дает равенство
~ = ∂P + ∂Q + ∂R .
div A
∂x
∂y
∂z
(5.7)
С использованием этого нового обозначения, формула Гаусса-Остроградского
запишется в инвариантной форме
ZZZ
~ dV =
div A
T
ZZ ³
´
~ · ~n dS .
A
4
(5.8)
S
В качестве примера использования формулы Гаусса-Остроградского,
приведем равенство, выражающее объем V области T ⊂ R3 через интеграл по поверхности S, ограничивающей эту область. Взяв в качестве
~ радиус-вектор произвольной точки трехмерного провекторного поля A
странства:
~ x + ~j y + ~k z ,
~r = A
придем к полезному соотношению
V =
1 ZZ
(~r · ~n) dS .
3
(5.9)
S
5.2
Уравнения непрерывности и диффузии
Формула Гаусса-Остроградского лежит в основе вывода многих фундаментальных законов природы. Проиллюстрируем сказанное примерами, иллюстрирующими использование формулы Гаусса-Остроградского
при выводе основных уравнений математической физики.
77
Пример: Вывод уравнения непрерывности. Пусть в пространстве движется сплошная среда, плотность которой в произвольной точке
с радиус-вектором ~r и в текущий момент времени t равна ρ(~r , t). Мысленно выделим произвольную неподвижную область V пространства, ограниченную замкнутой поверхностью S. Масса среды, заключенной в данной области в момент t, равна объемному интегралу
ZZZ
M (t) =
ρ(~r , t) dV .
V
~ (~r t) –векторная плотность потока, такая, что масса среПусть далее G
ды, протекающей через элементарную площадку dS в направлении еди~ · ~n )dS dt. Если
ничного вектора нормали ~n за время dt, равна dm = (G
внутри области V нет источников и стоков, то скорость убывания массы
среды в этой области равна полному потоку среды из ограничивающей
его замкнутой поверхности S:
−
ZZZ
ZZ
dm
∂ρ
~ · ~n ) dS .
=−
dV =
(G
dt
∂t
V
(5.10)
S
Здесь, как и всюду прежде, ~n –единичный вектор внешней нормали к
поверхности S. Заменив, с помощью формулы Гаусса-Остроградского,
входящий в (5.10) поверхностный интеграл на объемный, придем к тождеству:
)
ZZZ (
∂ρ
~ dV ≡ 0 .
+ div G
∂t
V
Из произвольности области V следует, что тождество это будет справедливо, лишь если всюду равно нулю подынтегральное выражение:
∂ρ(~r , t)
~ (~r , t) = 0 .
+ div G
∂t
(5.11)
Элементарные физические соображения подсказывают, что поток сплош~ = ρ ~u, где ~u(~r, t) –поле скорости движения среды.
ной среды равен G
Таким образом, мы пришли к одному из фундаментальных уравнений
гидромеханики – уравнению непрерывности
∂ρ
+ div (ρ ~u) = 0 .
∂t
F
(5.12)
Пусть в начальный момент времени t = 0 плотность среды всюду
была одинаковой: ρ(~r, t = 0) = ρ0 = const. Если среда несжимаема, то ее
78
плотность и в дальнейшем останется неизменной: ρ(~r, t) = ρ0 = const, а
уравнение непрерывности вырождается в тождество
div ~u(~r, t) ≡ 0 .
(5.13)
Векторные поля, удовлетворяющие данному тождеству называют вихревыми. Физическими примерами вихревых полей служат поля скорости,
практически несжимаемых, атмосферы и океана.
Пример: Уравнение диффузии. Получим, с помощью формулы
Гаусса-Остроградского, еще одно важное уравнение математической физики. Пусть ρ(~r, t) –концентрация частиц чернильной капли, помещенной
в стакан воды. Из физики известно, что за счет хаотических столкновений молекул чернил с молекулами воды чернильная капля с течением
времени расплывается. Причем, согласно закону Фика, плотность потока чернил равна
~ = −D grad ρ(~r, t) .
G
(5.14)
Здесь D –так называемый коэффициент диффузии. Подставив правую
часть закона Фика в уравнение (5.11), придем к знаменитому уравнению
диффузии:
∂ρ
= D∆ρ .
F
(5.15)
∂t
Замечание: Можно показать, что точно такому же уравнению подчиняется поле температур неравномерно нагретого однородного тела.
Только коэффициент D в этом случае заменяется на коэффициент температуропроводности. 4
5.3
Формула Стокса
Помимо формулы Гаусса-Остроградского, ключевую роль в векторном анализе и его разнообразных приложениях играет формула Стокса.
Она связывает поверхностные интегралы 2-го типа по гладким поверхностям S с криволинейными интегралами по граничным контурам.
Прежде чем выписать формулу Стокса, необходимо дать несколько
определений:
Определение 5.2 Двустороннюю поверхность S называют ориентированной, если на ней выбрано определенное направление нормали ~n(M ).
Напомним, что мы уже давали понятие ориентации кривой, определенной направлением ее обхода. Формула Стокса, к изучению которой
79
мы приступаем, предполагает согласованность ориентации поверхности
и граничного контура:
Определение 5.3 Ориентация двусторонней поверхности S и ориентация ограничивающего ее контура C считаются согласованными, если у наблюдателя, движущегося по выбранной стороне поверхности S,
по выбранному направлению обхода граничного контура C, внутренняя
часть поверхности остается по левую руку.
Пример ориентированной поверхности, с согласованным направлением обхода граничного контура, изображен на рис. 5.3. Сделаем несколько
замечаний по поводу данного определения:
Замечание: В случае плоской поверхности, вектор нормали которой
направлен на нас, положительное (согласованное) направление обхода
граничного контура отвечает движению против часовой стрелки. 4
Теперь мы готовы к тому, чтобы сформулировать теорему, содержащую формулу Стокса. Как и в случае формулы Гаусса-Остроградского,
приведем и докажем эту формулу в декартовой системе координат, а
уж затем дадим ее инвариантную, не зависящую от выбранной системы
координат, форму.
Теорема 5.2
Пусть S –ориентированная кусочно-гладкая поверхность, а C –согласованно ориентированный кусочно-гладкий граничный контур. Пусть кроме
того функции P (x, y, z), Q(x, y, z) и R(x, y, z) непрерывны на S = S + C,
и имеют непрерывные первые частные производные на S. Тогда имеет
место формула Стокса
¯
¯ cos α
I
ZZ ¯¯
¯ ∂
P dx + Q dy + R dz =
¯
¯ ∂x
C
S ¯¯
P
¯
cos β cos γ ¯¯
∂
∂ ¯¯
¯ dS ,
∂y
∂z ¯¯
Q
R ¯
(5.16)
где {cos α, cos β, cos γ} –направляющие косинусы нормали ~n к поверхности S.
Перед тем как приступить к доказательству формулы (5.16), запишем
ее в развернутом виде, расписав определитель:
I
P dx + Q dy + R dz =
ZZ
C
[(Ry − Qz ) cos α + (Pz − Rx ) cos β + (Qx − Py ) cos γ] dS .
S
80
(5.17)
Рис. 5.2: Иллюстрация к выводу формулы Стокса
Доказательство: При доказательстве формулы Стокса предположим для простоты, что уравнение поверхности задано в явном виде:
{x, y} ∈ Ω ⊂ R2 .
z = z(x, y) ,
Здесь Ω –проекция поверхности S на плоскость z = 0. Будем считать,
что она ограничена гладким плоским контуром L (см. рис. 5.4).
Рассмотрим вначале вспомогательный криволинейный интеграл 2-го
типа
I
J1 = P (x, y, z) dx .
C
Как известно, он сводится к криволинейному интегралу по плоскому
контуру L с помощью формулы
I
J1 =
I
P (x, y, z) dx =
C
P (x, y, z(x, y)) dx .
L
К последнему интегралу можно применить формулу Грина (3.28) (для
частного случая Q ≡ 0), что дает
ZZ
J1 = −
Ω
ZZ
∂
P (x, y, z(x, y)) dxdy = −
∂y
Ω
81
Ã
∂P ∂z(x, y)
∂P
+
∂y
∂z
∂y
!
dxdy .
Вспомнив далее связь между частной производной уравнения поверхности с направляющими косинусами вектора нормали ~n к поверхности
S
∂z
cos β
=−
,
∂y
cos γ
будем иметь
ZZ Ã
I
J1 =
P (x, y, z) dx = −
C
Ω
∂P
∂P cos β
−
∂y
∂z cos γ
!
dxdy .
Заметив наконец, что dxdy = cos γdS, где dS –площадь элемента поверхности S, проектирующаяся в прямоугольник площадью dxdy на плоскости z = 0, придем к равенству, связывающему криволинейный и поверхностный интегралы
I
J1 =
ZZ
P (x, y, z) dx =
C
(Pz cos β − Py cos γ) dS .
S
Пусть поверхность S такова, что ее можно записать не только явным
уравнением z = z(x, y), но и уравнениями x = x(y, z), y = y(x, z). Тогда
аналогичные рассуждения приводят к формулам
I
J2 =
ZZ
Q(x, y, z) dy =
C
I
J3 =
(Qx cos γ − Qz cos α) dS ,
S
ZZ
R(x, y, z) dy =
C
(Ry cos α − Rx cos β) dS .
S
Складывая левые и правые части трех последних равенств, придем к
формуле Стокса (5.17). Осталось добавить, что, указанную в формулировке теоремы, поверхность S можно разбить на конечное число кусков, каждый из которых однозначно проектируется на три координатные плоскости. Сложив формулы Стокса для всех кусков, и заметив, что
криволинейные интегралы по внутренним разбивающим линиям взаимно сокращаются, убедимся, что формула Стокса справедлива для любых
кусочно-гладких поверхностей, ограниченных кусочно-гладкими контурами. ¤
Замечание: Отметим “гибкость” формулы Стокса, состоящую в том,
что, при заданном контуре C, натянутая на него кусочно-гладкая поверхность S может быть выбрана произвольно. Лишь бы на S + C функции
P , Q и R были непрерывны. 4
Замечание: Обратим внимание, что в случае плоского, лежащего
в плоскости z = 0, контура C, и ограниченной им плоской области G
82
(cos α = cos β ≡ 0, cos γ ≡ 1), формула Стокса (5.17) переходит в формулу Грина (3.28). 4
Запишем формулу Стокса в виде, не зависящим от выбранной в пространстве системы координат. Для этого введем новое понятие ротора
~ В дальнейшем мы подробно обсудим это понятие
векторного поля rot A.
и убедимся, что ротор векторного поля не зависит от системы коорди~ А
нат, и выражает лишь пространственные свойства векторного поля A.
сейчас заметим только, что ротор векторного поля
~ = ~i P + ~j Q + ~k R
A
равен новому векторному полю, запись которого в декартовой системе
координат имеет вид
¯
¯ ~i
¯
¯
~ = ¯¯ ∂
rot A
¯ ∂x
¯
¯P
~j
∂
∂y
Q
¯
~k ¯¯
∂ ¯¯ ~
¯ = i (Ry − Qz ) + ~j (Pz − Rx ) + ~
k (Qx − Py ) . (5.18)
∂z ¯¯
R¯
С использованием этого выражения, и с учетом равенства (3.22), формула Стокса (5.17) перепишется в виде
I ³
´
~ · ~τ d` =
A
ZZ ³
´
~ dS .
~n · rot A
(5.19)
S
C
Замечание: По принятой терминологии, криволинейный интеграл
~ на2-го типа по замкнутому контуру от некоторого векторного поля A
зывают циркуляцией этого поля по контуру C в выбранном направлении.
~ вдоль контура C равна
Согласно формуле Стокса, циркуляция поля A
~
~
потоку векторного поля B = rot A через любую поверхность S, натянутую на контур C. 4
Формула Стокса позволяет по новому осмыслить понятие потенциального векторного поля, определенного в разделе 3.7 предыдущей главы: Потенциальным называют векторное поле, ротор которого тождественно равен нулю
~ ≡ 0.
rot A
(5.20)
Как видно из формулы Стокса (5.19), криволинейный интеграл 2-го типа
от потенциального поля тождественно равен нулю по любому контуру:
I ³
´
~ · ~τ d` ≡ 0 .
A
C
83
(5.21)
Последнее эквивалентно утверждению, что криволинейный интеграл 2го типа от потенциального поля не зависит от формы кривой, по которой
ведется интегрирование, а лишь от ее начальной и конечной точек. Заметим в заключение, что необходимые и достаточные условия (3.27) потенциальности векторного поля есть не что иное, как требование равенства
нулю компонент ротора этого поля (5.18).
84