Глава 1. Введение Глава 2. Уравнения первого порядка
advertisement

Глава 1.
Введение
Лекция 1
§1.
Понятие дифференциального уравнения. Основные определения.
§2.
Общее решение дифференциального уравнения, общий интеграл.
§3.
Постановка основных задач для обыкновенных дифференциальных уравнений.
Дополнительные условия.
10 .
20 .
30.
40.
§4.
Начальная задача (задача Коши).
Краевая задача.
Периодическая задача.
Задача Штурма-Лиувилля (краевая задача на собственные значения).
Геометрическая интерпретация обыкновенного дифференциального уравнения.
Лекция 2
§5.
Примеры физических задач, приводящих к дифференциальным уравнениям.
Глава 2.
§1.
Уравнения первого порядка
Простейшие случаи интегрирования дифференциальных уравнений первого
порядка.
10 .
20.
30.
40
Уравнения с разделяющимися переменными и приводимые к ним.
Линейное уравнение первого порядка.
Уравнение Бернулли, уравнение Риккати.
Уравнения в полных дифференциалах.
Лекция 3
§2.
Теорема существования и единственности решения скалярного уравнения.
10 .
20 .
30 .
40.
50.
Постановка задачи. Основной результат.
Доказательство существования решения задачи Коши.
Единственность решения задачи Коши.
Теорема существования и единственности решения задачи Коши в случае, когда
правая часть уравнения непрерывна и удовлетворяет условию Липшица в полосе.
Замечания. Примеры. Упражнения.
Лекция 4
§3.
Непрерывная зависимость решения задачи Коши от параметров и начальных
условий.
10.
20 .
Постановка задачи.
Теоремы о непрерывной зависимости решения от параметра.
§4.
Теоремы сравнения. Метод дифференциальных неравенств.
10.
20 .
30 .
40 .
Постановка задачи.
Теорема Чаплыгина о дифференциальных неравенствах.
Теорема Чаплыгина о существовании и единственности решения задачи Коши.
Примеры.
Лекция 5
§5.
Теоремы существования и единственности решения задачи Коши для
нормальной системы ОДУ.
10 .
20 .
30 .
40.
Постановка задачи.
Доказательство существования решения (метод последовательных
приближений).
Доказательство единственности решения.
Теорема существования и единственности решения задачи Коши в случае, когда
правая часть непрерывна и удовлетворяет условию Липшица в полосе.
§6.
Уравнения n –го порядка, разрешенные относительно старшей производной.
§7.
Замечания, примеры, упражнения.
Глава 3.
Линейные уравнения n-го порядка
Лекция 6
§1.
Общие свойства.
10 .
20.
Теорема существования и единственности решения задачи Коши.
Некоторые следствия линейности уравнения.
§2.
Линейное однородное уравнение.
§3.
Неоднородное линейное уравнение.
10 .
20 .
30 .
§4.
Общее решение неоднородного уравнения.
Функция Коши.
Метод вариации постоянных.
Линейные уравнения с постоянными коэффициентами.
10 .
20 .
Глава 4.
Общее решение однородного уравнения.
Неоднородное уравнение.
Системы линейных уравнений
Лекция 7
§1.
Общие свойства.
§2.
Однородная система.
10.
20 .
10 .
§ 3.
Линейная зависимость системы вектор-функций. Определитель Вронского.
ФСР однородной системы и ее свойства.
Общее решение однородной системы.
Неоднородная система.
10 .
20 .
Метод вариации постоянных, матрица Коши.
Метод исключения для системы линейных дифференциальных уравнений.
§ 4.
Некоторые приемы, упрощающие решение линейных дифференциальных
уравнений и систем.
§ 5.
Системы линейных уравнений с постоянными коэффициентами.
10.
20 .
Однородная система линейных уравнений с постоянными коэффициентами:
а) структура ФСР в случае простых собственных значений матрицы системы;
б) структура ФСР в случае кратных собственных значений матрицы системы.
Неоднородная система линейных уравнений с постоянными коэффициентами.
Глава 5.
Краевые задачи
Лекция 8
§1.
Краевая задача для линейного дифференциального уравнения второго порядка.
10.
20 .
30 .
40.
50.
Постановка задачи.
Формулы Грина. Тождество Лагранжа.
Теорема единственности решения неоднородной краевой задачи.
Теорема о достаточных условиях единственности решения неоднородной
краевой задачи.
Функции Грина и ее свойства.
Лекция 9
§ 2.
Нелинейные краевые задачи
10 .
20 .
30 .
40.
Постановка задачи.
Существования решения в случае ограниченной правой части (метод стрельбы).
Теорема Нагумо.
Примеры.
Глава 6.
Основы теория устойчивости
Лекция 10
§ 1.
Постановка задачи. Основные понятия.
§ 2.
Однородная система линейных дифференциальных уравнений с постоянными
коэффициентами. Устойчивость тривиального решения.
§ 3.
Второй метод Ляпунова. Лемма Ляпунова.
§ 4.
Исследование на устойчивость по первому приближению (первый метод
Ляпунова). Теорема Ляпунова.
§5.
Применение теорем Чаплыгина в некоторых задачах теории устойчивости.
Лекция 11
§ 6.
Классификация точек покоя линейной системы двух уравнений с постоянными
действительными коэффициентами.
§ 7.
Консервативная механическая система с одной степенью свободы.
§8.
Фазовая плоскость для нелинейного автономного уравнения 2-го порядка.
10.
20 .
30.
40 .
Постановка задачи.
Система первого приближения.
Фазовые траектории.
Примеры решения задач.
Глава 7.
Понятие об асимптотических методах
Лекция 12
§1.
Понятие регулярно и сингулярно возмущенных задач.
10.
20.
§ 3.
Регулярные возмущения.
Сингулярные возмущения. Теорема Тихонова.
Асимптотическое разложение решения по малому параметру.
10.
Регулярно возмущенная задача.
Сингулярно возмущенная задача.
20.
Глава 8.
Дифференциальные уравнения в частных производных
первого порядка
Лекция 13
§1.
Линейные однородные уравнения.
10.
20.
30.
40.
§2.
Характеристическая система, характеристики, первые интегралы.
Теорема о взаимосвязи первого интеграла характеристической системы и
решения линейного однородного уравнения.
Теорема об общем решении линейного однородного уравнения.
Задача Коши – постановка и схема решения в двумерном и общем случаях.
Квазилинейные уравнения.
10.
20.
Теорема о решении квазилинейного уравнения.
Задача Коши – постановка и схема решения.
Глава 9.
Численные методы
Лекция 14
§1.
Основные понятия.
10.
20.
30.
40.
50.
60.
70.
Понятие разностной схемы.
Разностная схема Эйлера для начальной задачи.
Разностная схема для краевой задачи.
Сходимость разностной схемы.
Аппроксимация разностной схемы.
Порядок аппроксимации разностной схемы Эйлера и разностной схемы для
краевой задачи.
Устойчивость разностной схемы.
§2.
Теорема о связи аппроксимации, устойчивости и сходимости разностной схемы.
§3.
Устойчивость схемы Эйлера.
§4.
Понятие о методе прогонки.
Глава 1. Введение
Лекция 1
§1.
Понятие дифференциального уравнения. Основные определения.
Определение 1.
Дифференциальным уравнением (ДУ) называют уравнение, в котором
неизвестная функция находится под знаком производной или дифференциала.
Определение 2.
Если неизвестная функция зависит от одной переменной, то уравнение
называют обыкновенным дифференциальным уравнением (ОДУ).
Примеры.
1)
Задачу отыскания всех первообразных y( x) для заданной функции f ( x) ∈ C [ a, b] можно
dy
= f ( x) . Как известно из курса математического анализа, это
dx
уравнение имеет на [ a, b ] однопараметрическое семейство решений вида y ( x, C ) = F ( x ) + C ,
записать в виде ОДУ y′ ≡
где F ( x ) – одна из первообразных функции f ( x) , а C ∈ R – вещественный параметр.
2)
Замечательным свойством функции y ( x) = e x является равенство ее своей производной,
что позволяет для этой функции записать ОДУ вида y′ = y , решениями которого будут все
функции вида y ( x) = Ce x . Проверьте это самостоятельно.
3)
Поскольку первая производная координаты по времени в механике называется
скоростью, то ОДУ, описывающее прямолинейное равномерное движение со скоростью v ,
•
dx
выглядит как x ≡
= v , а его решение, удовлетворяющее начальному условию x ( t0 ) = x0 ,
dt
имеет вид x ( t ) = x0 + v ( t − t0 ) .
Аналогично, ОДУ для прямолинейного равноускоренного движения с ускорением a
••
d 2x
записывается в форме x ≡ 2 = a , а его решение, удовлетворяющее начальным условиям
dt
4)
a ( t − t0 )
x ( t0 ) = x0 , x ( t0 ) = v0 имеет вид x ( t ) = x0 + v0 ( t − t0 ) +
.
2
5)
Если в уравнении окружности x 2 + y 2 = R 2 переменные
2
•
x
и
y считать
дифференцируемыми функциями x = x ( t ) , y = y ( t ) параметра t , то после дифференцирования
обеих частей равенства получится ОДУ семейства всех окружностей с центром в начале
координат:
dy
x
dx
dy
xdx + ydy = 0 ,
или
или
=− .
x +y
=0,
dx
y
dt
dt
Легко проверить, что одним из решений этих уравнений является пара функций x = R sin t ,
y = R cos t . Видно, что это пара функций является также решением следующей системы
дифференциальных уравнений:
⎧•
⎪ x = y,
⎨•
⎩⎪ y = − x.
6)
••
Уравнение малых линейных свободных колебаний без затухания имеет вид x + ω02 x = 0 .
Проверьте,
что
его
решением
является
функция
x ( t ) = C1 cos ω0t + C2 sin ω0t ,
или
••
•
x ( t ) = A sin (ω0t + ϕ ) . Убедитесь в том, что сделав замены x1 = x , x2 = x , уравнению x + ω02 x = 0
можно сопоставить эквивалентную систему дифференциальных уравнений
⎧•
⎪ x1 = x2 ,
⎨•
⎪⎩ x2 = −ω02 x1.
7)
••
Уравнение
•
x + 2γ 0 x + ω02 x = 0 ,
малых
линейных
0 < γ 0 < ω0 .
свободных
Проверьте,
затухающих
что
его
колебаний
решением
имеет
является
вид
функция
x ( t ) = e −γ 0t ( C1 cos ωt + C2 sin ωt ) , или x ( t ) = Ae−γ 0t sin (ωt + ϕ ) , где ω = ω02 − γ 02 . Убедитесь в
••
•
•
том, что сделав замены x1 = x , x2 = x , уравнению x + 2γ 0 x + ω02 x = 0 можно сопоставить
эквивалентную систему дифференциальных уравнений
⎧•
⎪ x1 = x2 ,
⎨•
⎪⎩ x2 = −2γ 0 x2 − ω02 x1.
Общий вид обыкновенного дифференциального уравнения.
В нашем курсе мы, как правило, будем обозначать значения неизвестной функции либо
буквой x , тогда независимой переменной будет t , либо буквой y , тогда независимой
переменной будет x . Мы будем также использовать сокращенные обозначения
⎛ • ••
⎞
или J n y = y, y′, y′′,… , yx( n ) .
J n x = ⎜ x, x, x, … , xt( n ) ⎟ ,
⎝
⎠
В этом случае произвольное ОДУ с одной неизвестной функцией может быть записано в виде
F t, J n x = 0 ,
или
F x, J n y = 0
(
(
)
)
(
)
Определение 3.
Порядком дифференциального уравнения называется
порядок входящей в него производной.
F x, J 2 y ≡ F ( x, y, y′, y′′ ) = 0
–
ОДУ 2-го порядка.
Например,
(
наивысший
)
Определение 4.
Уравнением,
называется ОДУ вида
разрешенным
относительно
(
старшей
производной,
)
y ( n ) ( x) = f x, J n −1 y .
Определение 4а. ОДУ, разрешенное относительно старшей производной, правая часть
которого не содержит явно независимой переменной, называется автономным, т.е.
y ( n ) ( x) = f J n −1 y .
(
)
Определение 5.
Нормальной системой ОДУ называют систему дифференциальных
уравнений первого порядка вида
⎧ y′1 = f1 ( x, y1 , , yn ),
⎪ ′
⎪ y 2 = f 2 ( x, y1 , , yn ),
,
⎨
,
⎪
⎪⎩ y′n = f n ( x, y1 , , yn )
или векторной форме
y′( x) = f ( x, y ) ,
⎛ y1 ( x ) ⎞
⎜
⎟
y2 ( x ) ⎟
⎜
,
y ( x) =
⎜ … ⎟
⎜⎜
⎟⎟
⎝ yn ( x ) ⎠
где
⎛ y1′ ( x ) ⎞
⎜
⎟
y2′ ( x ) ⎟
⎜
,
y′( x) =
⎜ … ⎟
⎜⎜
⎟⎟
⎝ yn′ ( x ) ⎠
⎛ f1 ( x, y1 , , yn ) ⎞
⎜
⎟
f ( x, y1 , , yn ) ⎟
.
f ( x, y ) = ⎜ 2
⎜
⎟
…
⎜⎜
⎟⎟
⎝ f n ( x, y1 , , yn ) ⎠
Замечание. Если правая часть нормальной системы ОДУ не содержит явно независимой
переменной, то ее называют динамической системой.
Подчеркнем характерную особенность обыкновенных дифференциальных уравнений,
отличающую их от прочих уравнений, содержащих производные неизвестных функций: все
неизвестные должны быть функциями одного вещественного аргумента; все они и их
производные должны входить в уравнение только в виде своих значений в одной и той же
переменной точке, которая также может фигурировать в уравнении.
Примеры дифференциальных уравнений, не являющихся ОДУ:
1)
•
x ( t ) = x ( 2t ) ;
•
x ( t ) = x ( t − 1) –
разностное уравнение;
2)
3)
•
уравнение с запаздывающим аргументом или дифференциально-
t
x ( t ) = ∫ x (τ ) dτ –
интегро-дифференциальное уравнение.
t0
Определение 6.
Если в ДУ неизвестная функция зависит от нескольких переменных, то
такое уравнение называют дифференциальным уравнением в частных производных.
Примеры дифференциальных уравнений в частных производных.
1)
( A ( r ) , grad u ( r ) ) = F ( r , u ) – уравнение в частных производных 1-го порядка.
2)
∂ 2u ( r , t )
– уравнение колебаний (волновое
= div ( k ( r , u, t ) grad u ( r , t ) ) + F ( r , u , t )
∂t 2
уравнение) – уравнение в частных производных 2-го порядка.
3)
∂u ( r , t )
–
уравнение
диффузии,
= div ( k ( r , u , t ) grad u ( r , t ) ) + F ( r , u , t )
∂t
(теплопроводности, Шрёдингера и т.д.) – уравнение в частных производных 2-го
порядка.
4)
div ( k ( r , u ) grad u ( r ) ) = − F ( r , u ) – уравнение Пуассона (Лапласа, если F ≡ 0 )
уравнение в частных производных 2-го порядка.
5)
∂f ( r , v , t )
∂f e ⎛
1
⎞ ∂f
+ v + ⎜ E + ⎣⎡v , B ⎦⎤ ⎟ = 0
∂t
∂r m ⎝
c
⎠ ∂v
уравнение в частных производных 1-го порядка.
–
– уравнение Власова-Максвелла –
§2.
Общее решение дифференциального уравнения, общий интеграл.
Определение 7.
Решением ДУ
обращающих уравнение в тождество.
называют
функцию,
или
совокупность
функций,
Определение 8.
Частное решение ДУ
– конкретная функция, удовлетворяющая
уравнению.
Например, для ОДУ y′′( x) + 4 y( x) = 0 частными решениями будут функции y1 = π sin 2 x ,
y2 = 2 cos 2 x , y3 = 3sin ( 2 x + π / 4 ) , y4 = 4 cos ( 2 x − π / 6 ) и т.д.
Множество решений ОДУ n -го порядка зависит от n произвольных постоянных.
Например, множество решений уравнения y′ = f ( x) есть y = F ( x) + C , где F ( x) — некоторая
первообразная функции для f ( x ) , C – произвольная постоянная.
Множество решений уравнения в частных производных 1-го порядка определено с
точностью до произвольной функции.
∂u ∂u
Например, множеством решений уравнения
−
= 0 является u = f ( x + y) (проверьте
∂x ∂y
самостоятельно), где f – произвольная дифференцируемая функция, например u = ( x + y ) m ,
u = cos( x + y) , u = sin e x+ y и т.д.
Определение 9.
Общим
решением
дифференциального
уравнения
называется
совокупность всех его решений.
Например, общим решением ОДУ y′′( x) + 4 y( x) = 0 является функция y = C1 sin 2 x + C2 cos 2 x ,
или (что одно и то же) y = A sin ( 2 x + ϕ ) , где C1 , C2 , A , ϕ
– произвольные постоянные.
Определение 10.
Процесс нахождения решения дифференциального уравнения называют
интегрированием ОДУ.
Определение 11.
Если
уравнение
(
)
Φ x, y , C = 0 ,
где
C = ( C1 , C2 ,…, Cn )
–
вектор
произвольных параметров, определяет все множество решений соответствующего ДУ, то его
называют общим интегралом данного ДУ, а полученное из него параметрическое семейство
решений также называют общим решением.
Замечание. Определенное в 11 общее решение является более узким, по сравнению с 9,
поскольку возможны еще особые решения, которые не входят в это семейство ни при каких
значениях параметров.
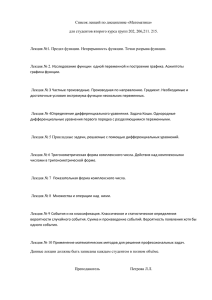
2
dy
Пример.
Рассмотрим уравнение
= y 3 . Проверьте, что его общим решением является
dx
3
⎛ x+C ⎞
функция y = ⎜
⎟ , а функция y = 0 будет особым решением. Графическая иллюстрация
⎝ 3 ⎠
приведена на рис. 1.
3
2
dy
⎛ x+C ⎞
Рис. 1.
= y3 , y = ⎜
⎟ , y=0
dx
⎝ 3 ⎠
В ряде случаев задача интегрирования ОДУ первого порядка сводится к исследованию
соответствующей неявной функции с помощью первого интеграла.
Определение 12.
Функция F ( x, y ) , определенная в области G ⊂ R 2 и не равная в ней
постоянной функции, называется первым интегралом ОДУ первого порядка, если для любого
решения y = ϕ ( x ) этого уравнения, график которого лежит в области G , и для любых
x ∈ ( a, b) существует такая постоянная C такая, что F ( x, ϕ ( x )) = C .
Определение первого интеграла естественным образом переносится на системы,
например, на динамические системы.
Определение 13.
Функция V ( x), {V : R n → R} , определенная и непрерывная в области
D ⊂ R n и не равная постоянной, называется первым интегралом динамической системы
dx
= f ( x)
dt
в области D , если для любого решения x = ϕ (t ) этой системы существует постоянная C такая,
что V ( x (t )) = C для всех t ∈ ( a, b) .
Аналогично формулируется определение первого интеграла для уравнения n − го
порядка.
Определение 14.
(
(
Если для любого решения ОДУ y = ϕ ( x ) существует функция F x, J ( p ) y
)
(
)
)
такая, что F x, J ( p )ϕ ( x ) = const при всех x , то такая функция F x, J ( p ) y называется первым
интегралом ОДУ.
В физических задачах первыми интегралами могут быть энергия, импульс, момент
инерции, масса, заряд и т.д. Некоторые примеры даны в таблице.
1.
Уравнение
Общий интеграл
Общее решение
y′ = f ( x)
y − ∫ f ( x ) dx − C = 0
y = ∫ f ( x ) dx + C
Частное
решение
x
y=
∫ f (ξ )dξ
Первый
интеграл
F = const
y − ∫ f ( x ) dx
x0
2.
y′ = −
3.
x
y
••
x + ω02 x = 0
y 2 + x2 − C = 0
y 2 + x2 = C
y2 + x2 = 1
x − C1 cos ω0t + C2 sin ω0t = 0 x = C1 cos ω0t + C2 sin ω0t x = cos ω0t
или x − A sin (ω0t + ϕ ) = 0
или x = A sin (ω0t + ϕ )
y2 + x2
2
⎛•⎞
2 2
⎜ x ⎟ + ω0 x
⎝ ⎠
Об интегрировании ОДУ в квадратурах.
Выражение общего решения или полного
интеграла через элементарные функции и интегралы от них (берущихся или не берущихся в
элементарных функциях) называют интегрированием данного ОДУ в квадратурах.
Интегрирование в квадратурах допускают лишь уравнения некоторых простейших типов.
Большинство же ОДУ можно решать только приближенно или исследовать их качественными
методами, то есть методами, позволяющими выяснять свойства решений без явного их
отыскания. Качественные и приближенные методы составляют основное содержание
современной теории обыкновенных дифференциальных уравнений.
Пример 1.
Движение
материальной
точки
массы
m
под
действием
силы
F ( r ) = { Fx ( x ) , Fy ( y ) , Fz ( z )} , которая зависит только от положения точки (не зависит явно от
времени), а каждая декартова проекция силы зависит только от соответствующей проекции
радиуса–вектора. Уравнения движения имеют вид
••
m r = F (r )
или в координатах
••
••
••
m x = Fx ( x ) ,
m y = Fy ( y ) ,
m z = Fz ( z ) .
Общее решение этих уравнений может быть получено в квадратурах. Рассмотрим,
например первое из них и проделаем следующие выкладки
••
m x = Fx ( x )
2
2
2
•
1 d ⎛•⎞
1
dx
2
2
1
⎛•⎞
⎛•⎞
x
=
F
x
=>
d
x
=
F
x
dx
=>
x x = Fx ( x ) x =>
(
)
(
)
⎜ ⎟
⎜ ⎟
⎜ x ⎟ = ∫ Fx ( x ) dx + C1
x
x
2 dt ⎝ ⎠
m
dt
m
m
m
⎝ ⎠
⎝ ⎠
• ••
1/ 2
•
⎛2
⎞
x = ± ⎜ ∫ Fx ( x ) dx + C1 ⎟
⎝m
⎠
1/ 2
=>
dx
⎛2
⎞
= ± ⎜ ∫ Fx ( x ) dx + C1 ⎟
dt
⎝m
⎠
t + C2 = ± ∫
=> dt = ±
dx
1/ 2
⎛2
⎞
⎜ ∫ Fx ( x ) dx + C1 ⎟
⎝m
⎠
.
Если заданы начальные условия
•
•
x ( t0 ) = x0 , x ( t0 ) = x 0 ,
то решение задачи Коши выражается в квадратурах и имеет вид
dx
1/ 2
⎛2
⎞
⎜ ∫ Fx ( x ) dx + C1 ⎟
⎝m
⎠
x
t − t0 = ± ∫
dξ
.
1/ 2
ξ
• ⎞
x0 ⎛ 2
⎜ ∫ Fx (η ) dη + x02 ⎟
⎜mx
⎟
⎝ 0
⎠
Пример 2.
Решение уравнения y′ = y 2 − x нельзя записать в виде интеграла от элементарной
функции, т.е. в квадратурах.
§3.
Постановка основных задач для обыкновенных дифференциальных
уравнений. Дополнительные условия.
Наряду с ОДУ для постановки задач используют начальные и граничные условия,
количество и вид которых определяются «физической» постановкой задачи.
10.
Начальная задача (задача Коши) (Огюстен Луи Коши (1789-1857) - французский математик):
(n)
y ( x) = f x, J n −1 y
(
J n −1 y ( x0 ) = Y 0
)
–
начальные условия
( y( x ) = Y , y′( x ) = Y ,…, y(
0
0
0
0
0
1
n −1)
( x0 ) = Yn0−1
Пример 1.
Рассмотрим задачу Коши:
2
⎫
dy
3
= y3 ⎪
⎛ x+3⎞
⇒
y
=
dx
⎬
⎜
⎟ – решение задачи существует и единственно.
3
⎝
⎠
y (0) = 1 ⎭⎪
Пример 2.
Рассмотрим задачу Коши:
2
⎫
dy
3
= y3 ⎪
⎛ x⎞
y = 0 – решение задачи существует, но не единственно.
dx
⎬ ⇒ y=⎜ ⎟ ,
⎝3⎠
⎪
y (0) = 0 ⎭
20.
Краевая задача (2-х точечная):
y′′( x) = f ( x, y, y′ ) ,
граничные условия первого рода (задача Дирихле):
граничные условия второго рода (задача Неймана):
x ∈ ( a, b )
y ( a ) = ya ,
y′(a ) = ya ,
y (b) = yb ;
y′(b) = yb ;
граничные условия третьего рода:
y′(a) + α y ( a ) = ya ,
y′(b) + β y (b) = yb ;
периодические граничные условия:
y (a) = y ( b ) ,
y′(a) = y′ ( b )
Пример 1.
Рассмотрим краевую задачу:
2
⎫
d y
= 1, x ∈ ( 0,1) ⎪
2
dx
⎬ ⇒ y = x (1 − x ) – решение задачи существует и единственно.
y (0) = 0, y (1) = 0 ⎪⎭
Пример 2.
Рассмотрим краевую задачу:
2
⎫
d y
= 1, x ∈ ( 0,1) ⎪
2
dx
⎬ – решение задачи не существует.
y′(0) = 0, y ′(1) = 0 ⎪⎭
)
Пример 3.
Рассмотрим краевую задачу:
2
⎫
d y
= 0, x ∈ ( 0,1) ⎪
2
dx
⎬ ⇒ y = C – задача имеет бесконечное множество решений.
y ′(0) = 0, y ′(1) = 0 ⎪⎭
30.
Периодическая задача.
В общем случае задача о периодических решениях – это
•
задача о нахождении T -периодического решения уравнения x = f ( t , x ) с T -периодической по
переменной t правой частью: f ( t , x ) = f ( t + T , x ) . Эта задача весьма важна в приложениях,
поскольку такие решения описывают периодические колебательные процессы в реальных
системах, например в механических и электрических устройствах.
40.
Задача Штурма-Лиувилля (краевая задача на собственные значения).
Оператором Штурма-Лиувилля называется дифференциальный оператор 2-го порядка
d ⎛
dy ⎞
Ly = ⎜ p ( x ) ⎟ − q ( x ) y , где коэффициенты p( x) ∈ C1[a, b], p( x) > 0 , q( x) ∈ C[a, b], q( x) ≥ 0 .
dx ⎝
dx ⎠
Поставим вопрос: при каких значениях параметра λ существует нетривиальное решение
краевой задачи ( α12 + α 22 ≠ 0, β12 + β 22 ≠ 0 )
Ly + λρ ( x) y = 0
⎧
,
⎨
β1 y (b) + β 2 y′(b) = 0
⎩α1 y (a) + α 2 y′(a ) = 0,
где ρ ( x) ∈ C[a, b], ρ ( x) > 0 .
Такая задача называется краевой задачей на собственные значения и собственные
функции для оператора Штурма-Лиувилля (сокращенно – задача Штурма-Лиувилля); числа
λn , при которых существуют нетривиальные решения, называются собственными
значениями, а соответствующие нетривиальные решения – собственными функциями.
Пример.
Найти собственные значения и собственные функции задачи Штурма-Лиувилля
⎧ y′′ + λ y = 0, x ∈ ( 0, l )
.
⎨
⎩ y (0) = 0, y (l ) = 0
Решение. В случае λ = − μ 2 < 0 имеем общее решение y ( x) = C1e μ x + C2 e − μ x . Учитывая
граничные условия, получаем единственное решение y ( x) = 0 , т.е. собственных функций (и
собственных значений) нет.
y( x) = C1 x + C2 . С учетом
В случае λ = 0 общее решение рассматриваемого уравнения
граничных условий получаем y ( x) = 0 – нет собственных функций.
Пусть λ = μ 2 > 0 , тогда общее решение уравнения имеет вид y ( x) = C1 sin μ x + C2 cos μ x .
Дополнительные условия дают y (0) = 0 ⇒ C2 = 0 , y (l ) = 0 ⇒ C1 sin μ l = 0 , откуда получаем
2
⎛πn ⎞
, n ∈ N . Следовательно, искомые собственные значения λn = μ n2 = ⎜
⎟ ,
l
⎝ l ⎠
πn
x.
n ∈ N , а отвечающие им собственные функции имеют вид yn ( x) = C sin
l
sin μ l = 0 ⇒ μ n =
πn
В курсе интегральных уравнений будет доказано следующее утверждение.
Теорема (Стеклова).
Любая функция f ( x) ∈ C 2 [a, b] , удовлетворяющая однородным
краевым условиям, представима в виде абсолютно и равномерно сходящегося ряда Фурье по
ортонормированной с весом ρ ( x) системе собственных функций yn ( x) задачи ШтурмаЛиувилля (с теми же краевыми условиями)
∞
f ( x ) = ∑ f n yn ( x ) ,
n =1
b
где коэффициенты Фурье определяются формулой f n = ∫ f ( x) yn ( x ) ρ ( x) dx .
a
§4.
Геометрическая интерпретация ОДУ.
Графики решений
относительно производной
y = y ( x)
скалярного
ОДУ
первого
порядка,
разрешенного
y ′ = f ( x, y ) ,
(1)
называются его интегральными кривыми. В геометрических терминах данное уравнение
выражает следующий факт: кривая на (x, y)-плоскости является его интегральной кривой в том
и только том случае, когда в любой точке (x0, y0) этой кривой она имеет касательную с
угловым коэффициентом k = f(x0, y0).
Таким образом, зная правую часть уравнения (1), можно заранее построить касательные
ко всем интегральным кривым во всех точках: для этого каждой точке (x0, y0) нужно
сопоставить проходящую через нее прямую с угловым коэффициентом k = f(x0, y0). Полученное
соответствие между точками плоскости и проходящими через нее прямыми, называется полем
направлений уравнения (1).
Конечно, фактически поле направлений можно построить лишь в виде достаточно
густой сетки отрезков с отмеченными на них точками. После этого задача построения
интегральных кривых становится похожей на отыскание нужного пути в большом парке,
снабженном густой сетью стрелок-указателей.
Метод изоклин. Построение поля направлений значительно облегчается предварительным
нахождением изоклин – кривых на (x, y)-плоскости, вдоль которых угловой коэффициент k
сохраняет неизменное значение. Уравнение изоклин имеет вид f ( x, y ) = k . Вдоль изоклин
отрезок,
принадлежащий
полю
направлений,
переносится
параллельно
своему
первоначальному положению: переход к другой изоклине осуществляется изменением k и
построением отрезка с новым угловым коэффициентом.
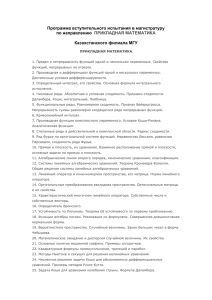
Например, для уравнения y′ = x 2 + y 2 изоклины описываются уравнением x 2 + y 2 = k и
представляют собой семейство концентрических окружностей с центром в начале координат.
На рисунке изображены изоклины (синим цветом), поля направлений (черные стрелки) и
интегральные кривые (красные линии).
Лекция 2
§5.
Примеры задач, приводящих к ОДУ.
Пример 1: нормальное размножение. Пусть x — количество особей в некоторой
биологической популяции (например, количество рыб в пруду). При нормальных условиях:
достаток пищи, отсутствие хищников и болезней, — скорость размножения пропорциональна
числу особей:
•
x = kx,
k > 0.
Решение с начальным условием x(t0 ) = x0 имеет вид x(t ) = x0e
отношение
x(t + T )
= ekT
x (T )
k ( t −t0 )
. Заметим, что при всех T > 0
не зависит от x0 и t . Для населения Земли известен период удвоения T ≈ 40 лет, и можно
ln 2
определить коэффициент k из соотношения ekT = 2 , т.е. k =
.
T
Пример 2: радиоактивный распад. Пусть x – количество радиоактивного вещества. Тогда
скорость распада будет пропорциональна количеству этого вещества, т.е.:
•
x = kx,
k <0 .
Как и в примере 1, решением с начальным условием x(t0 ) = x0 будет функция x(t ) = x0e ( 0 ) .
Время, необходимое для уменьшения количества радиоактивного вещества вдвое, называется
1
ln 2
периодом полураспада и определяется из уравнения e kT = , т.е. T = −
. Для радия-226 он
2
k
составляет 1620 лет, для урана-238 – 4,5 ⋅109 лет.
k t −t
Пример 3: взрыв. В физико-химических задачах часто встречается ситуация, когда скорость
реакции пропорциональна концентрации обоих реагентов. В задачах динамики популяций в
некоторых случаях скорость прироста также пропорциональна не количеству особей, а
количеству пар, т.е.
•
x = kx 2 ,
k >0 .
В данном случае рост решения происходит гораздо быстрее экспоненциального, и величина
x(t ) неограниченно возрастает за конечное время: интегральная кривая решения с начальным
условием x(0) = x0 описывается формулой
⎧
⎪⎪
x(t ) = ⎨
⎪
⎩⎪
1
1
,
⋅
k 1 −t
kx0
0
,
и имеет вертикальную асимптоту ("момент взрыва")
x0 ≠ 0
x0 = 0
t=
1
.
kx0
Пример 4: уравнения Лагранжа для механических систем. Рассмотрим систему из N
свободных материальных точек
с массами m j , j = 1, 2,..., N . Пусть в некоторой
Aj
декартовой инерциальной системе координат (т. е. в такой, где справедлив второй закон
Ньютона) радиус-вектор точки A j есть rj = rj ( t ) . Тогда ее скорость и ускорение вычисляются
•
••
как производные от rj (t ) : v j = rj ( t ) , a j = rj ( t ) . Допустим, что сумма всех внешних и
внутренних сил, приложенных к
A j , есть вектор-функция
•
⎛
Fj = Fj ⎜ t , r , r
⎝
⎞
⎟,
⎠
где
⎛
⎞
r = ⎜ r1 , r2 , … , rN ⎟ . Тогда данная механическая система описывается, согласно второму закону
⎝
⎠
Ньютона, задачей Коши для системы ОДУ:
••
•
⎛
⎞
(1)
m j rj = F j ⎜ t , r , r ⎟ ,
⎝
⎠
•
rj (t0 ) = rj0 , rj (t0 ) = v j0
j = 1, 2,..., N .
Таким образом, второй закон Ньютона дает общий метод описания механических систем с
помощью дифференциальных уравнений.
Пусть на систему наложены связи (например, точки соединены жесткими стержнями
пренебрежимо малой массы и т. п.) Тогда 3N -мерная точка r , изображающая мгновенное
положение всей системы, уже не может принимать произвольное положение в пространстве
R3N, а в каждый момент времени t принадлежит некоторому множеству Kt ⊂ R3N,
называемому конфигурационным многообразием данной механической системы.
Мы будем предполагать, что конфигурационное многообразие допускает следующее
описание. Пусть t0 ∈ R, r0 ∈ Kt . Тогда должны существовать окрестность U ⊂ R точки t0 и
окрестность V ⊂ R3N точки r0 такие, что для любого t ∈U любая точка r ∈ Kt ∩ V однозначно
записывается в виде
0
r = r (t, q ) ,
где функция r ( t , q ) определена по переменной
n
R
(2)
q = ( q1 , q2 ,..., qn ) на открытом множестве Q ⊂
(n ≤ 3N), дважды непрерывно дифференцируема по совокупности переменных и
∂r ( t , q )
имеет максимально возможный ранг n .
∂q
вектора q , которые по заданным t ∈U и r ∈ Kt ∩ V находятся
невырождена, т.е. (3 N × n) - матрица Якоби
Координаты
( q1 , q2 ,..., qn )
однозначно, называются локальными обобщенными, или лагранжевыми координатами точки r
. Выбор локальных обобщенных (или просто обобщенных) координат, конечно, неоднозначен.
Число n называется размерностью конфигурационного многообразия.
Для системы со связями в правых частях уравнения (1) появляются неизвестные заранее
силы реакции связей. Если связи идеальны, (т. е. соответствующие силы реакции не производят
работы), то задача, тем не менее, остается динамически определенной, так как уравнения связей
(2) дают необходимую дополнительную информацию. Однако практически бывает удобно
рассматривать вместо (1), (2) эквивалентную ей систему уравнений Лагранжа второго рода,
записанную непосредственно в обобщенных координатах ( q1 , q2 ,..., qn ) и не содержащую сил
реакции связей. Вывод уравнений Лагранжа дается в курсе теоретической механики, здесь мы
только опишем алгоритм построения этих уравнений, состоящий из трех шагов.
1) Выражение кинетической энергии системы через обобщенные координаты:
⎛
⎞
m jv
∂ rj ∂ rj • ⎟
1
⎛ ⎞ 1
⎜
T =∑
= ∑ m j ⎜ rj ⎟ = ∑ m j ⎜
+
q
2
2 j =1 ⎝ ⎠
2 j =1 ⎜ ∂t
∂q ⎟⎟
j =1
⎝
⎠
N
2) Вычисление обобщенных сил:
2
j
N
•
2
N
2
N
∂ rj
j =1
∂qi
Qi = ∑ F j
i = 1, 2,..., n .
,
3) Выписывание уравнений Лагранжа:
d ∂T ∂T
−
= Qi ,
dt ∂ q• ∂ q
i
i
i = 1, 2,..., n .
Пример 5: гармонический осциллятор и математический маятник. Составим уравнения
Лагранжа для двух конкретных механических систем, изображенных на рисунке.
Гармонический осциллятор – это грузик на гладком стержне, поддерживаемый с двух концов
пружинами. Для него в качестве единственной обобщенной координаты q можно взять
декартову координату q = x ; для маятника естественно выбрать q = ϕ . Тогда уравнения (2)
для этих систем запишутся в виде
осциллятор:
r = ( x, 0, 0 ) ;
маятник:
r = ( l sin ϕ , 0, −l cos ϕ ) .
Для маятника эта функция взаимно однозначна при ϕ ∈ (−π , π ) или при ϕ ∈ (0, 2π ) (две
локальные системы координат).
Кинетическая энергия этих механических систем вычисляется по формулам
2
1 ⎛i⎞
осциллятор:
T = m⎜ x⎟ ;
2 ⎝ ⎠
2
1
⎛i⎞
T = ml 2 ⎜ ϕ ⎟ ,
2
⎝ ⎠
маятник:
а обобщенные силы – по формулам
осциллятор:
F = ( −kx, 0, 0 ) ,
маятник:
F = ( 0, 0, − mg ) ,
∂r
= (1, 0, 0 ) ,
∂x
∂r
= ( l cos ϕ , 0, l sin ϕ ) ,
∂ϕ
∂r
= − kx ;
∂x
∂r
Q=F
= − mgl sin ϕ
∂ϕ
Q=F
Далее:
Осциллятор:
∂T
•
∂q
=
∂T
•
∂x
•
= mx,
∂T ∂T
=
= 0.
∂q ∂x
••
m x = − kx ,
Уравнение движения
∂T
Маятник:
•
∂q
=
∂T
•
∂ϕ
••
m x + ω02 x = 0 ,
или
k
.
m
ω0 =
g
.
l
∂T ∂T
=
= 0.
∂q ∂ϕ
•
= ml 2 ϕ ,
••
••
ml 2 ϕ = −mgl sin ϕ , или
Уравнение движения
ω0 =
ϕ + ω02 sin ϕ = 0 ,
Если ϕ << 1 , то sin ϕ ≈ ϕ , и ϕ + ω02ϕ = 0 – линеаризованное уравнение колебаний.
Если длина стержня маятника изменяется во времени, т.е.
будет иметь вид
Пример 6:
рисунке.
••
ϕ+
•
2l •
ϕ + ω 2 ( t ) sin ϕ = 0 , где
l
ω (t ) =
g
l (t )
l = l (t ) , то уравнение движения
(получите это самостоятельно).
уравнение RLCE-контура. Рассмотрим электрическую цепь, изображенную на
Она состоит из четырех двухполюсников: сопротивления R, индуктивности L, емкости C и
источника ЭДС E. Если для двухполюсника A произвольно выбрать положительное
направление, то в любой момент времени ему можно сопоставить две величины: напряжение uA
(вольт) и ток iA (ампер). При смене положительного направления они меняют знак. Каждый из
двухполюсников описывается определенным уравнением:
du
di
u E = −e ( t ) .
u R = RiR ,
C C = iC ,
L L = uL ,
dt
dt
Неотрицательные параметры R (ом), L (генри) и C (фарада) называются, как и сами
двухполюсники, сопротивлением, индуктивностью и емкостью; заданная функция e(t)
характеризует источник ЭДС. Соединения двухполюсников в цепь описываются двумя
законами Кирхгофа.
Первый закон Кирхгофа гласит: сумма токов, втекающих в любой узел, равна нулю. В
рассматриваемом контуре четыре узла, они помечены цифрами. Из закона Кирхгофа для узла 1
следует, что iE = iR, так как в этот узел втекают токи iE и –iR. Из рассмотрения остальных узлов
следует, что ток во всем контуре одинаковый:
iE = iR = iC = iL = i .
Второй закон Кирхгофа утверждает, что сумма напряжений при обходе любого замкнутого
контура равна нулю (положительные направления двухполюсников должны быть согласованы
с направлением обхода).
В нашем случае:
uE + uR + uC + uL = 0
или
di
L + uC + Ri = e ( t )
dt
Из уравнения емкости следует, что
du
di
d 2u
=C 2
i= C ,
dt
dt
dt
Введя обозначение u = uC , получаем окончательно
LCu′′ + RCu′ + u = e ( t )
Это и есть уравнение RLCE-контура. В него входит только напряжение емкости u; все
остальные напряжения и токи вычисляются по известному значению u:
uL = e ( t ) − u − uR .
u R = Ri ,
i = Cu ′ ,
Заметим, что при R = 0 и e(t ) = 0 полученное уравнение лишь обозначениями отличается от
уравнения гармонического осциллятора. Здесь проявляется универсальность языка
дифференциальных уравнений: он выявляет существенные связи между разными уравнениями.
1
.
В уравнении контура роль величины ω0 играет
LC
Пример 7: модель биологической системы "хищник-жертва". Приведем вывод уравнений,
описывающих изменение численности двух взаимосвязанных биологических видов: "жертвы"
(N1) и "хищника" (N2) по книге известного итальянского математика Вито Вольтерры.
Встречающийся в этом выводе термин "коэффициент прироста" обозначает отношение N′/N
скорости изменения численности вида к его численности. В подобных моделях функцию
удобно считать гладкой, хотя на самом деле она принимает целочисленные значения и,
следовательно, изменяется скачкообразно. Поскольку модель носит приближенный характер,
такая интерпретация допустима.
Если бы в среде, где обитают эти виды, находился только один из них, а именно жертва,
то у него был бы некоторый коэффициент прироста ε1>0. Другой вид (хищник), питающийся
только жертвой, в предположении, что он существует изолированно, имеет некоторый
коэффициент прироста –ε2<0. Когда два такие вида сосуществуют в ограниченной среде,
первый будет развиваться тем медленнее, чем больше существует индивидуумов второго вида,
а второй — тем быстрее, чем многочисленнее будет первый вид. Гипотеза, довольно простая,
состоит в том, что коэффициенты прироста равны соответственно
ε1 − γ 1 N 2 , ε1 > 0, γ 1 > 0 и −ε 2 + γ 2 N1 , ε 2 > 0, γ 2 > 0 .
Это приводит к системе дифференциальных уравнений для описания численности видов:
dN1
= N1 ( ε1 − γ 1 N 2 )
dt
dN 2
= N 2 ( −ε 2 + γ 2 N1 )
dt
N1 ( t0 ) = N10 , N 2 ( t0 ) = N 20
На практике, при выводе дифференциальных уравнений помимо строгих законов нередко
используются гипотезы и различные приближенные представления.
Пример 8: сведение уравнения в частных производных к ОДУ.
Уравнение теплопроводности на отрезке с «холодильниками» на концах. Начальнокраевая задача для температуры u( x, t ) в тонком однородном стержне имеет вид
граничные условия
начальное условие
∂u
∂ 2u
= a 2 2 + f ( x, t ) ,
∂t
∂x
u (0, t ) = 0 , u(l, t ) = 0 ;
u( x,0) = ϕ ( x) .
(0 < x < l ) ;
Рассмотрим два подхода к решению этой задачи, приводящие к ОДУ.
1)
Преобразование Лапласа. В результате применения преобразования Лапласа, получим
+∞
ОДУ для образа U ( x, p ) =
∫ u ( x, t ) e
− pt
dt
0
pU ( x, p ) − ϕ ( x ) = a 2
+ F ( x, p ) ,
∂x 2
U (0, p) = 0 , U (l, p) = 0 ,
с граничными условиями
+∞
где F ( x, p ) =
∫ f ( x, t ) e
− pt
∂ 2U ( x, p )
(0 < x < l )
dt .
0
Решая эту задачу и обращая преобразование Лапласа (например, по формуле Меллина)
можно получить искомую функцию u ( x, t ) .
2)
Метод Фурье.
Решение начально-краевой задачи для уравнения теплопроводности
можно искать в виде ряда Фурье
∞
u ( x, t ) = ∑ un ( t )ψ n ( x )
n =1
по ортонормированной системе {ψ n ( x )} собственных функций задачи Штурма-Лиувилля
d 2ψ n
+ λnψ n = 0 , (0 < x < l )
∂x 2
ψ n (0) = 0 ,
ψ n (l ) = 0 .
Подставив решение в указанном выше виде в исходное уравнение
∞
∞
dun ( t )
d 2ψ n ( x )
2
+ f ( x, t )
ψ n ( x ) = a ∑ un ( t )
∑
dt
dx 2
n =1
n =1
и учитывая определение {ψ n ( x )} , получим
∞
dun ( t )
2
ψ
x
=
−
a
un ( t ) λnψ n ( x ) + f ( x, t ) .
∑
∑
n( )
dt
n =1
n =1
Умножим обе части последнего равенства на {ψ n ( x )} и проинтегрируем по переменной x от 0
до l:
∞
l
l
∞
dun ( t ) l
2
ψ
x
ψ
x
dx
=
−
a
u
t
λ
ψ
x
ψ
x
dx
+
(
)
(
)
(
)
(
)
(
)
∑
∑
n
k
n
n∫ n
k
∫0 f ( x, t )ψ k ( x ) dx .
dt ∫0
n =1
n =1
0
∞
l
⎧0, k ≠ n
∫0 ψ n ( x )ψ k ( x ) dx = ⎨⎩1, k = n , и обозначив ϕk = ∫0 ϕ ( x )ψ k ( x ) dx ,
l
Учитывая условие нормировки
l
и f k ( t ) = ∫ f ( x, t )ψ k ( x ) dx , для определения функций uk ( t ) получим ОДУ
0
с начальным условием
duk ( t )
+ a 2 λk uk ( t ) = f k ( t )
dt
uk (0) = ϕ k
(задача Коши).
В частности, решение однородного уравнения теплопроводности (при f ( x, t ) ≡ 0 ) с
граничными условиями первого рода имеет вид
2
⎛ π na ⎞
⎟ t
l ⎠
−⎜
2 ∞
u ( x, t ) =
ϕn e ⎝
∑
l n =1
Получите самостоятельно эту формулу.
⎛ π nx ⎞
sin ⎜
⎟.
⎝ l ⎠
Глава 2. Уравнения первого порядка.
§1.
Простейшие
первого порядка.
10.
случаи
интегрирования
дифференциальных
уравнений
Уравнения с разделяющимися переменными и приводимые к ним.
Уравнения вида y′ = f ( x) .
Пусть функция f ( x ) – определена и непрерывна на некотором интервале a < x < b . В
таком случае все решения данного дифференциального уравнения определяются формулой
y = ∫ f ( x )dx + C . Если заданы начальные условия x0 и y0 , то можно найти постоянную C .
Определение.
Уравнение
вида
называется
уравнением
с
Y ( y ) dy = X ( x) dx
разделяющимися переменными.
Решение.
Пусть решение существует. Тогда, подставляя это решение в записанное выше
уравнение, получим общий интеграл
d ∫ X ( x)dx − ∫ Y ( y )dy = 0
==>
X ( x ) dx − Y ( y ) dy = 0 ==>
(
)
∫ Y ( y)dy − ∫ X ( x)dx = C ,
т.е. уравнение проинтегрировано в квадратурах.
В случае задачи Коши с начальным условием y ( x0 ) = y0 , решение определяется
соотношением
y
x
y0
x0
∫ Y (η )dη − ∫ X (ξ )dξ = 0 .
Уравнения, сводящиеся к уравнению с разделяющимися переменными.
dy
dy
Уравнения
или
приводятся к уравнениям с
= f ( x) g ( y )
g ( y)
= f ( x)
dx
dx
разделяющимися переменными.
Уравнение вида y′ = f (ax + by ) также сводится к
рассматриваемому типу заменой ax + by = z .
Определение.
Дифференциальное уравнение y ′ = f ( x, y ) называется однородным, если
его правая часть удовлетворяет соотношению f ( kx, ky ) = f ( x, y ) .
Уравнение
вида
является
однородным,
если
P ( x, y ) dx + Q ( x, y )dy = 0
α
α
P ( kx, ky ) = k P ( x, y ) и Q ( kx , ky ) = k Q ( x , y ) . Однородное уравнение приводится к уравнению
x
y
с разделяющимися переменными при помощи замены z =
или z = .
y
x
a b
⎛ ax + by + c ⎞
⎟⎟ при условии Δ =
Уравнение вида y ′ = f ⎜⎜
≠ 0 сводится к
a1 b1
⎝ a1 x + b1 y + c1 ⎠
однородному заменой переменных x = x0 + t , y = y0 + z , где x0 и y0 – решение системы
⎧ax + by + c = 0
.
⎨
⎩a1 x + b1 y + c1 = 0
20.
Линейное уравнение первого порядка.
dy
Определение.
Уравнение вида
+ p ( x) y ( x) = f ( x) называется линейным. В случае
dx
f ( x ) ≡ 0 данное уравнение называется линейным однородным.
Решение. Видно, что y ( x) = 0 – решение. Если y ( x) ≠ 0 разделим переменные:
dy
= − p ( x)dx .
y
Интегрируя обе части, получим ln | y |= − ∫ p ( x)dx + C , или | y |= e
∫
− p ( x ) dx + C
=e e
C
∫
− p ( x ) dx
.
Раскрывая модуль и заменяя ± eC на произвольную константу C , получим окончательно
y ( x ) = Ce
Покажем, что формула y ( x ) = Ce
∫
− p ( x ) dx
∫
− p ( x ) dx
.
дает общее решение задачи. Пусть ϕ ( x ) – любое
решение линейного однородного уравнения первого порядка, т.е.
Рассмотрим функцию Φ ( x ) = ϕ ( x ) e
∫ p ( x ) dx
dϕ ( x )
+ p ( x )ϕ ( x ) = 0 .
dx
. Тогда
∫ p ( x ) dx ⎛ dϕ ( x )
⎞ ∫ p ( x ) dx
d Φ ( x ) dϕ ( x ) ∫ p ( x ) dx
+ ϕ ( x) p ( x) ⎟ e
=0
e
=
+ ϕ ( x) p ( x) e
=⎜
dx
dx
⎝ dx
⎠
Следовательно,
− ∫ p ( x ) dx
dΦ ( x)
= 0 ==> Φ ( x ) = C ==> ϕ ( x ) = Ce
.
dx
Решение y ( x) = 0 получается при C = 0 .
x
−
∫ p (ξ ) d ξ
Решение задачи Коши с начальным условием y ( x0 ) = y0 имеет вид y ( x ) = y0 e x0
.
В том, что это решение, убеждаемся подстановкой. Единственность следует из единственности
представления. В частности, при y0 = 0 линейное однородное дифференциальное уравнение
первого порядка имеет только тривиальные решения.
Получим теперь общее решение неоднородного линейного ОДУ первого порядка
y′( x ) + p ( x ) y ( x ) = f ( x) .
Метод вариации постоянной (метод Лагранжа) (Лагранж Жозеф Луи (1736-1813) - французский
математик, президент Берлинской Академии Наук, почетный член Петербургской Академии наук (1776)).
Первый шаг данного метода состоит в отбрасывании правой части уравнения и замене ее
нулем, т.е. решается однородное уравнение y ′ + p ( x ) y = 0 . Его общее решение было
получено выше и выглядит так:
− p( x )dx
y0 ( x ) = Ce ∫
.
Решение неоднородного уравнения
dy
+ p ( x) y ( x) = f ( x)
dx
будем искать в виде
− p ( x ) dx
, т.е. формально заменяя постоянную C некоторой функцией от
y ( x) = C ( x) e ∫
C ( x) в
формуле общего решения однородного уравнения. Далее, по правилам дифференцирования
произведения функций имеем
y′ =
− p ( x ) dx
dy dC ( x ) − ∫ p ( x ) dx
.
e
=
− C ( x ) p ( x )e ∫
dx
dx
Подставляя это соотношение в исходное уравнение, получим
− p ( x ) dx
− p ( x ) dx
dC ( x) − ∫ p ( x ) dx
e
−C ( x ) p ( x ) e ∫
+ p ( x )C ( x ) e ∫
= f ( x)
dx
Разделяя переменные
dC − ∫ p ( x ) dx
e
= f ( x) .
dx
dC = f ( x)e ∫
p ( x ) dx
C ( x ) = ∫ f ( x )e ∫
p ( x ) dx
dx ,
найдем
dx + C1
Подставив последнюю формулу в выражение для
линейного уравнения в виде квадратур:
y ( x) , получим общее решение
− p ( x ) dx ⎛
p ( x ) dx
− p ( x ) dx
y ( x) = C1e ∫
+ ⎜ ∫ f ( x )e ∫
dx ⎞⎟ e ∫
.
⎝
⎠
Метод Бернулли (Якоб Бернулли (1654-1705) – швейцарский математик).
Суть метода заключается в том, что искомая функция представляется в виде
dv
du
произведения двух функций y = u ( x )v ( x ) , тогда y ′ = u ⋅ + v ⋅
.
dx
dx
Подставляя в исходное уравнение, получаем
u
dv
du
+v
+ p ( x)uv = f ( x) или
dx
dx
u
dv
⎛ du
⎞
+ v⎜
+ p ( x)u ⎟ = f ( x) .
dx
⎝ dx
⎠
Важное замечание:
так как функция y ( x) была представлена в виде произведения,
то каждый из сомножителей, входящих в это произведение, определен неоднозначно. Таким
образом, одну из функций можно выбрать так, чтобы
du
dx
+ p ( x )u = 0 .
Интегрируя полученное УРП, найдем функцию u ( x) :
− p ( x ) dx
du
.
= − p ( x)dx ==> u = Ce ∫
u
Для определения второй неизвестной функции v ( x ) подставим полученное выражение
для функции u ( x) в исходное уравнение
u
dv
⎛ du
⎞
+ v⎜
+ p ( x)u ⎟ = f ( x)
dx
⎝ dx
⎠
выражение, стоящее в скобках, равно нулю, т.е.
− p ( x ) dx dv
p ( x ) dx
Ce ∫
= f ( x ) ==> Cdv = f ( x)e ∫
dx .
dx
с учетом того, что
Интегрируя, найдем функцию v ( x ) :
Cv = ∫ f ( x)e ∫
p ( x ) dx
dx + C1
v( x) =
==>
1⎛
∫ p ( x ) dx dx + C ⎞ .
f
x
e
(
)
⎜
1⎟
C ⎝∫
⎠
Подставляя функции u ( x) и v ( x ) в формулу для решения, получаем:
− p ( x ) dx 1 ⎛
p ( x ) dx
y = u ( x)v( x) = Ce ∫
dx + C1 ⎞⎟ ,
⋅ ⎜ ∫ f ( x )e ∫
C⎝
⎠
или
− p ( x ) dx ⎛
∫ p ( x ) dx dx + C ⎞ ,
y ( x) = e ∫
⎜ ∫ f ( x )e
1⎟
⎝
⎠
где C1 – произвольная константа.
Легко видеть, что данное представление совпадает с полученным ранее методом
вариации постоянной. Анализ структуры решения линейного дифференциального уравнения
позволяет сформулировать следующее утверждение.
Принцип суперпозиции. Решение линейного ОДУ представляет собой сумму общего
решения соответствующего однородного уравнения и частного решения однородного
уравнения.
Для задачи Коши с начальным условием y ( x0 ) = y0 имеет место теорема существования
и единственности решения.
Теорема.
Пусть p ( x ) и f ( x ) ∈ C ( a, b ) . Тогда через каждую точку ( x0 , y0 ) полосы
( a, b ) × R
проходит одна и только одна интегральная кривая, определенная при всех
Доказательство.
x ∈ (a, b) .
В силу линейности задачи Коши
⎧ y ′ + p( x) y = f ( x),
,
⎨
y
(
x
)
=
y
,
0
0
⎩
(1)
представим функцию y ( x) в виде суммы y ( x) = y1 ( x) + y2 ( x) , где
однородной задаче Коши с неоднородным начальным условием:
y1 ( x) удовлетворяет
⎧⎪ y1′ + p( x) y1 = 0,
⎨
y1 ( x0 ) = y0 ,
⎪⎩
(2)
а y2 ( x) удовлетворяет неоднородной задаче Коши с однородным начальным условием:
⎧⎪ y2′ + p( x) y2 = f ( x ) ,
⎨
y1 ( x0 ) = 0.
⎪⎩
(3)
Подстановкой в (2) и (3) доказывается, что решение задачи (2) имеет вид
x
−
y1 ( x) = y0 e
∫
p (ξ ) d ξ
,
x0
а решение задачи (3) –
x
−
y2 ( x ) = e
∫
x0
p (ξ ) d ξ x
∫e
x0
η
∫
x0
x
p (ξ ) d ξ
x
f (η )dη = ∫ e
∫
− p (ξ ) d ξ
η
f (η )dη .
x0
Следовательно, решение задачи Коши (1) существует и может быть получено по формуле
x
−
y ( x) = y0e
∫
p (ξ ) d ξ
x0
x
x
+∫e
∫
− p (ξ ) d ξ
η
f (η )dη .
x0
Единственность решения (1) следует из того факта, что задача Коши для однородного
уравнения с нулевым начальным условием имеет только тривиальное решение. Действительно,
пусть y1 ( x) и y2 ( x) два решения задачи Коши (1). Тогда их разность h( x) = y1 ( x) − y2 ( x) , в силу
линейности уравнения, является решением следующей задачи Коши:
⎧ dh
⎪ + p ( x) h = 0,
⎨ dx
h( x0 ) = 0.
⎩⎪
Поскольку эта задача имеет единственное решение h ( x ) ≡ 0 , то y1 ( x) ≡ y2 ( x) .
x
Замечание. Обозначим K ( x,η ) = e
общее решение запишется в виде
−
∫ p (ξ ) d ξ
η
– импульсная функция (функция Коши). Тогда
x
y ( x) = CK ( x, x0 ) + ∫ K ( x,η ) f (η ) dη
x0
Y ( x)
y ( x)
где Y ( x ) - общее решение однородного уравнения, y ( x ) - частное решение неоднородного.
Решение задачи Коши с начальным условием y ( x0 ) = y0 теперь будет выглядеть так:
x
y ( x) = K ( x, x0 ) y0 + ∫ K ( x,η ) f (η )dη .
x0
30.
Уравнение Бернулли и уравнение Риккати.
Определение.
Уравнением Бернулли называется уравнение вида
y′ + p ( x) y = f ( x) ⋅ y q .
Заменой
z=
1
уравнение Бернулли приводится к линейному. Для этого разделим
y q −1
исходное уравнение на y q
y′
1
+
p
x
= f ( x) .
(
)
yq
y q −1
1
( q − 1) y q −2
( q − 1) y ′
, получим
Выполнив подстановку z = q −1 , с учетом z ′ = −
′
⋅
=
−
y
y
y 2 q−2
yq
−
z′
q −1
+ p ( x ) z = f ( x ) , или z ′ − ( q − 1) p ( x ) z = − ( q − 1) f ( x )
– линейное уравнение относительно неизвестной функции z ( x ) . Решение этого уравнения
можно представить в виде
− p ( x ) dx
z ( x) = e ∫
1
(∫
f1 ( x )e ∫
p1 ( x ) dx
)
dx + C ,
где
p1 ( x ) = − ( n − 1) p ( x );
f1 ( x ) = − ( n − 1) f ( x ) .
Решение уравнения Бернулли можно также искать непосредственно, используя
описанные выше метод вариации постоянной (Лагранжа) или метод Бернулли.
Определение.
Уравнение вида
y ′ + p ( x ) y + q ( x ) y = f ( x ) называется
уравнением Риккати.
Если известно какое либо частное решение y1 ( x) уравнения Риккати, то замена
y = y1 ( x) + z приводит его к уравнению Бернулли относительно функции z ( x ) . В качестве
упражнения проделайте соответствующие выкладки самостоятельно.
2
40.
Уравнения в полных дифференциалах.
Определение. Дифференциальное уравнение первого порядка вида M ( x, y ) dx + N ( x, y ) dy = 0
называется уравнением в полных дифференциалах, если левая часть этого уравнения
представляет собой полный дифференциал некоторой функции u = F ( x, y ) .
Интегрирование такого уравнения сводится к построению функции u = F ( x, y ) , после
чего решение легко находится в виде F ( x, y ) = C , так как du = 0 . Таким образом, для решения
задачи необходимо определить:
а)
в каком случае левая часть уравнения представляет собой полный дифференциал
функции u ( x, y ) ;
б)
как найти эту функцию.
является полным
а)
Если дифференциальная форма M ( x, y ) dx + N ( x, y ) dy
дифференциалом некоторой функции u ( x, y ) , то можно записать:
∂u
∂u
dy.
dx +
du = M ( x, y )dx + N ( x, y )dy =
∂x
∂y
⎧ ∂u
⎪⎪ ∂x = M ( x, y )
Так как
,
⎨ ∂u
⎪ = N ( x, y )
⎪⎩ ∂y
то найдем смешанные производные второго порядка, продифференцировав первое уравнение
по у, а второе – по х:
⎧ ∂ 2 u ∂M ( x, y )
=
⎪
∂y
⎪ ∂x∂y
⎨ 2
⎪ ∂ u = ∂N ( x, y )
⎪⎩ ∂x∂y
∂x
Приравнивая левые части уравнений, получаем необходимое и достаточное условие того, что
левая часть дифференциального уравнения является полным дифференциалом
∂M ( x, y ) ∂N ( x, y )
.
=
∂x
∂y
б)
Рассмотрим один из возможных способов нахождения функции u = F ( x, y ) .
∂u
Проинтегрировав равенство
= M ( x, y ) , получим u ( x, y ) = ∫ M ( x, y )dx + C ( y ). Заметим, что
∂x
в последней формуле первообразные отличаются друг от друга не на константу C , а на
некоторую функцию C ( y ) , т.к. при интегрировании переменная y считается параметром.
Определим функцию C ( y ) , для чего продифференцируем полученное равенство по y
∂u
∂
= N ( x, y ) = ∫ M ( x, y )dx + C ′( y ) .
∂y
∂y
∂
M ( x, y )dx .
∂y ∫
Для нахождения функции C ( y ) теперь необходимо проинтегрировать последнее соотношение.
Однако, перед интегрированием надо доказать, что C ( y ) действительно не зависит от x , что
будет выполнено, если производная по переменной x равна нулю. Убедимся в этом, вычислив
нужную производную:
∂N ( x, y ) ∂ ⎛ ∂
′ ∂N ( x, y ) ∂ ∂
⎞ ∂N ( x, y ) ∂M ( x, y )
−
M ( x, y )dx =
− ⎜ ∫ M ( x, y )dx ⎟ =
−
=0.
[С ′( y )]x =
∫
∂x
∂x ∂y
∂x
∂y ⎝ ∂x
∂x
∂y
⎠
Теперь определяем функцию C ( y ) :
C ′( y ) = N ( x, y ) −
Далее,
C ( y) =
⎡ N ( x , y ) − ∂ M ( x , y ) dx ⎤ dy + C .
∫ ⎢⎣
∫
⎥⎦
∂y
Подставив этот результат в выражение для u , найдем
∂
⎡
⎤
u = M ( x, y ) dx + N ( x, y ) −
M ( x, y ) dx dy + C .
⎢⎣
⎥⎦
∂y
Тогда общий интеграл исходного дифференциального уравнения будет иметь вид
⎡
⎤
∂
∫ M ( x, y)dx + ∫ ⎢⎣ N ( x, y) − ∂y M ( x, y)dx ⎥⎦ dy = C .
Отметим, что при решении уравнений в полных дифференциалах не обязательно
использовать полученную формулу. Решение может получиться более компактным, если
просто следовать методу, который использовался при ее выводе.
∫
Теорема.
∫
∫
Q = ( a , b ) × ( c, d )
Пусть в прямоугольнике
непрерывны вместе со своими частными производными
функции
∂M
∂y
и
M ( x, y )
и
N ( x, y )
∂N
, причем всюду в Q
∂x
∂M ( x, y ) ∂N ( x, y )
=
и N ( x, y ) ≠ 0 .
∂y
∂x
Тогда через каждую точку ( x0 , y0 ) ∈ Q проходит одна и только одна интегральная кривая
выполнено условие
уравнения M ( x, y ) dx + N ( x, y ) dy = 0 .
Упражнение 1.
Докажите теорему существования и единственности решения задачи Коши
для уравнения в полных дифференциалах.
Теорема.
Q = ( a , b ) × ( c, d )
Пусть в прямоугольнике
непрерывны вместе со своими частными производными
выполнено условие
∂M ( x, y ) ∂N ( x, y )
=
∂y
∂x
и N ( x, y ) ≠ 0 .
функции
∂M
∂y
и
M ( x, y ) и
N ( x, y )
∂N , причем всюду в Q
∂x
Выберем произвольную точку
( x0 , y0 ) ∈ Q .
x
Тогда функция
F ( x, y ) =
y
∫ M (ξ , y ) d ξ + ∫ N ( x , η )dη
0
x0
является первым интегралом уравнения
y0
M ( x , y ) dx + N ( x , y ) dy = 0 .
Упражнение 2.
Докажите теорему о первом интеграле уравнения в полных дифференциалах.
Лекция 3
§2.
Теорема существования и единственности решения скалярного уравнения
10.
Постановка задачи. Основной результат.
Рассмотрим задачу Коши
dy
= f ( x, y) ,
(1)
dx
y ( x0 ) = y0 .
Функция f ( x, y) задана в области G плоскости ( x, y) , содержащий замкнутый
прямоугольник D = [ x0 − a, x0 + a ] × [ y0 − b, y0 + b] , D ⊂ G . Предположим, что выполнены
следующие условия:
(У1) Пусть f ( x, y) непрерывна в области D и, следовательно, равномерно ограничена. Тогда
существует постоянная M = max f ( x, y ) , т.е.
D
f ( x, y ) ≤ M в D.
f ( x, y) удовлетворяет в D условию Липшица по переменной y , т.е.
f ( x, y1 ) − f ( x, y2 ) ≤ N y1 − y2 , где N - постоянная Липшица, не зависящая от x и y .
∂f ( x, y )
Замечание. Последнее условие будет выполнено, в частности, если
∈C ( D) .
∂y
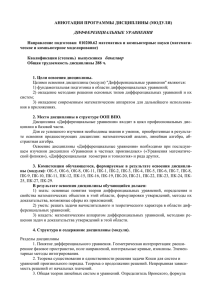
Очевидно, что если интегральная кривая, проходящая через точку ( x0 , y0 ) , существует,
(У2)
Пусть
⎛ b ⎞
то она не покинет прямоугольник D до точки x = x0 + H , где H = min ⎜ a, ⎟ (см. рис. 1).
⎝ M⎠
D
y0 + b
x0 + a
( x0 , y0 )
x0 +
y0 − b
x0 + a
Рис. 1
b
M
Действительно, уравнения «крайних» интегральных кривых, удовлетворяющих задаче
dy
= ± M , y ( x0 ) = y0 , имеют вид y − y0 = ± M ( x − x0 ) . Подставив уравнения
Коши
dx
горизонтальных границ области D y = y0 ± b в эти уравнения, получим x = x0 +
b
M
.
Теорема 1. (существования и единственности решения задачи Коши для скалярного ОДУ).
Пусть выполнены условия (У1) и (У2).
Тогда на отрезке x0 − H ≤ x ≤ x0 + H
существует единственное решение задачи (1).
Следующее
утверждение
существенно
используется
при
доказательстве
сформулированной теоремы.
Лемма 1.
Пусть функция f ( x, y) непрерывна по совокупности переменных в некотором
прямоугольнике D = [ x0 − a, x0 + a ] × [ y0 − b, y0 + b] .
Тогда задача Коши (1) эквивалентна интегральному уравнению
x
y ( x) = y0 + ∫ f (ξ , y (ξ ) ) dξ ,
(2)
x0
которое рассматривается в классе непрерывных функций.
Доказательство. Пусть y ( x) – решение (1), целиком лежащее в D. Тогда, подставляя его в
(1) и интегрируя полученное тождество в пределах от x0 до x ∈ [ x0 − a, x0 + a ] , получим, что
y ( x) удовлетворяет уравнению (2).
С другой стороны, если непрерывная функция
f ( x, y( x) ) также непрерывна, а
y ( x) является решением (2), то
x
∫ f (ξ , y (ξ ) ) d ξ
является непрерывно дифференцируемой
x0
функцией переменной x . Следовательно, y ( x) – решение дифференциального уравнения
dy
= f ( x, y) , удовлетворяющее начальным условиям y ( x0 ) = y0 .
dx
20 .
Доказательство теоремы существования решения задачи Коши.
Для доказательства теоремы применим метод последовательных приближений
(метод Пикара). Определим итерационный процесс метода последовательных приближений
так:
yn′ ( x) = f ( x, yn −1 ( x) ) ,
(3)
yn ( x0 ) = y0 , n = 1, 2,... ,
где y0 ( x) - произвольная непрерывная функция, график которой целиком лежит в области D .
На каждой итерации задача (3) разрешима, и ее решение при x ∈ [ x0 , x0 + H ] представимо в виде
x
yn ( x) = y0 + ∫ f (ξ , yn −1 (ξ ) ) d ξ .
(4)
x0
Далее, в силу условия
кривая
yn ( x )
не
f ( x, y ) ≤ M ,
покинет
( x, y ) ∈ D
угол
имеем yn′ ( x ) ≤ M . Поэтому интегральная
между
диагоналями
прямоугольника
b
b ⎤
⎡
⎢⎣ x0 − M , x0 + M ⎥⎦ × [ y0 − b, y0 + b ] и, следовательно, f ( x, yn −1 ( x ) ) ∈ C ([ x0 − H , x0 + H ]) . Отсюда, в
частности, вытекает, что y1 ( x) − y0 ( x) ≤ 2b . В результате получим функциональную некоторую
последовательность { yn ( x)} . Исследуем ее свойства.
Функциональная последовательность { yn ( x)} сходится равномерно на множестве
Лемма 2.
[ x0 , x0 + H ] .
Доказательство.
Рассмотрим функциональный ряд
S ( x ) = y1 ( x) + ( y2 ( x) − y1 ( x) ) + … + ( yn ( x) − yn −1 ( x) ) + … ,
частичная сумма S n ( x) которого совпадает с yn ( x) : Sn ( x ) ≡ yn ( x) . Для членов этого ряда
справедливы следующие оценки:
x
x
y2 ( x) − y1 ( x) ≤ ∫ f (ξ , y1 (ξ ) ) − f (ξ , y0 (ξ ) ) dξ ≤ N ∫ y1 (ξ ) − y0 (ξ ) dξ ≤ 2bN ( x − x0 ) .
x0
x0
x
y3 ( x) − y2 ( x) ≤
∫ f (ξ , y (ξ ) ) − f (ξ , y (ξ ) ) dξ
2
1
x0
x
≤ 2bN
2
∫ (ξ − x ) dξ = 2bN
2
( x − x0 )
0
2
2!
x0
x
≤ N ∫ y2 (ξ ) − y1 (ξ ) dξ ≤
x0
( NH )
≤ 2b
2!
2
.
Докажите самостоятельно, используя метод математической индукции, что
x
yn −1 ( x) − yn ( x) ≤
∫
x0
x
f (ξ , yn −1 (ξ ) ) − f (ξ , yn − 2 (ξ ) ) dξ ≤ N ∫ yn −1 (ξ ) − yn − 2 (ξ ) dξ ≤
x0
2bN n −1
( x − x0 ) ≤ 2b ( NH ) .
n−2
≤
(ξ − x0 ) dξ = 2bN n−1
∫
( n − 2 )! x0
( n − 1)!
( n − 1)!
n −1
x
n −1
(5)
Таким образом, члены рассматриваемого функционального ряда мажорируются по
абсолютной величине членами сходящегося (например, по признаку Даламбера) числового ряда
( NH )
∑
n =1 ( n − 1) !
∞
n −1
, сумма которого равна e NH . Следовательно, ряд
равномерно на множестве
[ x0 , x0 + H ]
S n ( x) сходится абсолютно и
(признак Вейерштрасса), а значит функциональная
последовательность { yn ( x)} также сходится равномерно на множестве [ x0 , x0 + H ] .
Лемма 3.
Функциональная последовательность { yn ( x)} сходится к непрерывному решению
интегрального уравнения (2), записанного выше.
Доказательство. Поскольку все функции
yn ( x )
непрерывны,
а
функциональная
последовательность { yn ( x)} ⇒ y ( x ) , то y ( x ) ∈ C ([ x0 , x0 + H ]) .
n →∞
Кроме того, равномерная сходимость последовательности непрерывных функций
{ yn ( x)}
является достаточным условием для перехода к пределу под знаком интеграла в выражении (4).
В результате получим
x
y ( x ) = y0 + ∫ f (ξ , y (ξ ) ) dξ ,
x0
т.е. предел последовательных приближений
(2), эквивалентному задаче Коши (1).
скалярного уравнения доказано.
{ yn ( x)}
удовлетворяет интегральному уравнению
Итак, существование решения задачи Коши для
30.
Единственность решения задачи Коши.
Для доказательства единственности будет использовано следующее утверждение.
Пусть существует постоянная L > 0 такая, что для всех x ∈ [ a, b]
Лемма (Гронуолла).
выполнено неравенство
x
0 ≤ z ( x ) ≤ z0 + L ∫ z (ξ )d ξ ,
(6)
a
0 ≤ z ( x ) ≤ z0 e L ( x − a )
Тогда при z0 > 0 справедлива оценка
В случае z0 = 0 имеет место
Доказательство.
(7)
z ( x) ≡ 0 .
x
1) Пусть z0 > 0 . Положим Y ( x ) ≡ z0 + L ∫ z (ξ )d ξ > 0, ∀x ∈ [ a, b ] , Y ( a ) = z0 , тогда в силу (6)
a
имеем
z ( x) ≤ Y ( x) .
(8)
Так как Y ( x) – дифференцируемая функция, то выполнено Y ′ = Lz ( x) ≤ LY ( x) , откуда в силу
Y > 0 , вытекает
Y ( a ) = z0
Y′
≤ L . Далее интегрируя, имеем ln Y ( x) − ln Y (a ) = ln Y ( x) − ln z0 ≤ L( x − a ) ,
Y
откуда после потенцирования получаем Y ( x) ≤ z0 e L ( x − a )
(8)
⇒
z ( x) ≤ Y ( x) ≤ z0 e L ( x − a ) , ∀x ∈ [a, b] .
2)
Пусть z0 = 0 . Если (6) выполнено для z0 = 0 , то тем более (6) верно при всех z0 > 0 , т.е.
справедлива оценка (7). Переходя к пределу при z0 → 0 в (7), получим 0 ≤ z( x) ≤ 0 , откуда
следует, что z ( x) ≡ 0 . Лемма доказана.
Лемма 4.
Интегральное уравнение (2) имеет единственное решение y ( x) ∈ C ([ x0 , x0 + H ]) .
Доказательство.
Предположим, что имеется два различных решения уравнения (2) y1 ( x ) и
y2 ( x) . Тогда их разность u ( x ) = y1 ( x) − y2 ( x) удовлетворяет интегральному уравнению
x
u ( x) = ∫ [ f (ξ , y1 (ξ ) ) − f (ξ , y2 (ξ ) )]dξ ,
x0
x
откуда
| u ( x) |≤ ∫ f (ξ , y1 (ξ ) ) − f (ξ , y2 (ξ ) ) dξ
x0
усл . Липшица
≤
x
N ∫ | u (ξ ) | dξ .
x0
Полагая z ( x) =| u ( x) | , получим неравенство, доказанное в лемме Гронуолла в случае z0 = 0
x
z ( x) ≤ N ∫ z (ξ )dξ , ∀x ∈ [ x0 , x0 + H ]
x0
л . Гронуолла
⇒
z ( x) = y1 ( x) − y2 ( x) ≡ 0 ⇔ y1 ( x) ≡ y2 ( x) .
Замечание 1.
Условие Липшица может быть заменено более удобным требованием
∂f
наличия непрерывной в D (и потому ограниченной) производной
. Тогда существует
∂y
постоянная N = max | f ′ y | такая, что f ( x, y1 ) − f ( x, y2 ) ≤ N | y1 − y2 | , т.е. выполнено условие
D
Липшица.
Замечание 2.
Теорема 1 носит локальный характер. Мы доказали ее в области
+
Аналогично
можно
доказать
ее
в
области
D = {x0 ≤ x ≤ x0 + H , | y − y0 |≤ b} .
D − = {x0 − H ≤ x ≤ x0 , | y − y0 |≤ b} .
40.
Теорема существования и единственности решения задачи Коши в случае, когда
правая часть уравнения непрерывна и удовлетворяет условию Липшица в полосе.
Примером утверждения, имеющего нелокальный характер, т.е. в котором
устанавливается существование решения на всем промежутке гладкости по x , является
следующая теорема.
Теорема 2.
Пусть функция f ( x, y ) непрерывна и удовлетворяет условию Липшица по
переменой y в полосе {[ x0 , x0 + a], y ∈ R} .
Тогда задача (1) имеет единственное решение на отрезке [ x0 , x0 + a ] .
Доказательство этой важнейшей в нашем курсе теоремы лишь незначительно отличается
от приведенного выше доказательства Теоремы 1. При организации итерационного процесса
(3) в качестве начального приближения можно взять любую непрерывную на отрезке
[ x0 , x0 + a ] функцию y0 ( x) . Так как определяемая формулой (3) функция y1 ( x) непрерывна на
отрезке [ x0 , x0 + a ] (как и все последующие приближения
yi ( x), i = 2,3,... ), то на всем
отрезке [ x0 , x0 + a ] выполнено неравенство y1 ( x) − y0 ( x) ≤ d . Это приводит к незначительному
изменению в оценке (5): постоянную 2b нужно заменить на d , а постоянную H – на a .
Детали этого доказательства читателю предлагается уточнить самостоятельно.
50 .
Замечания, примеры, упражнения.
Замечание 1.
Можно доказать разрешимость задачи Коши лишь при выполнении
условия (У1), т.е. предполагая лишь непрерывность функции f ( x, y) в области D (теорема
Пеано). Однако, в этом случае решение не обязательно единственно.
Пример 1. (нарушение единственности решения задачи Коши). Рассмотрим уравнение
dy
= 2 | y|.
dx
Правая часть f ( x, y ) = 2 | y | определена и непрерывна при всех ( x, y ) . Покажем, что
условие Липшица не выполняется в прямоугольниках, содержащих точки оси x .
Действительно, если условие Липшица выполняется, то при y1 ≠ y2 справедливо неравенство:
f ( x, y1 ) − f ( x, y2 ) 2 | y1 | − 2 | y2 |
=
≤ L,
| y1 − y2 |
| y1 − y2 |
тогда как при y2 = 0 и y1 → 0
f ( x, y1 ) − f ( x, 0)
2
→ ∞.
| y1 − 0 |
| y1 |
Проверьте самостоятельно, что существуют два решения задачи Коши, удовлетворяющие
начальному условию y (0) = 0 :
⎧ x2 ,
x ≥ x0
y ( x) ≡ 0 .
и
y ( x) = ⎨ 2
x ≤ x0
⎩− x ,
=
Замечание 2 (о продолжении решения). Решение задачи Коши (1) может быть продолжено,
например, вправо за точку x1 = x0 + H , если условия теоремы существования и единственности
выполняются в прямоугольнике D1 = { | x − x1 | ≤ a1 , | y − y ( x1 ) | ≤ b1} . В этом случае решение (1)
существует и единственно на отрезке [ x0 , x1 + H1 ] , где постоянная H1 находится из тех же
соображений, что и H в Теореме 1. Заметим, что продолжение решения возможно не всегда
даже в случае, если f ( x, y ) – бесконечно дифференцируемая функция.
Пример 2.
Рассмотрим задачу Коши
dy
= y2
dx
y (0) = 1
Найдем ее точное решение.
dy
dy
1
dy
1
= dx => ∫ 2 = ∫ dx => − = x + C => y( x) = −
= y 2 =>
– общее решение
2
y
y
y
dx
x+C
дифференциального уравнения. Используя начальное условие y (0) = 1 , получим C = −1 .
1
1
=
– решение задачи Коши.
Поэтому y ( x) = −
x −1 1− x
Оценим промежуток существования решения задачи Коши в соответствии с Теоремой 1,
т.е. найдем параметр H , фигурирующий в этой теореме. Пусть решение задачи Коши на
отрезке x ∈ [ 0, H ] отклонилось от своего начального значения на величину r . Тогда
H=
r
,
M
M = (1 + r )
2
=>
H (r ) =
r
(1 + r )
2
.
Найдем максимальное значение H .
(1 + r ) − 2r (1 + r ) = (1 + r )(1 + r − 2r ) = 1 − r = 0
H ′(r ) =
4
4
3
(1 + r )
(1 + r )
(1 + r )
2
=>
r = 1,
H 0 = H (1) =
1
.
4
⎡ 1⎤
Таким образом, Теорема 1 гарантирует разрешимость задачи лишь на отрезке x ∈ ⎢ 0, ⎥ .
⎣ 4⎦
Заметим, что из вида точного решения задачи Коши вытекает возможность его
продолжения вправо лишь на промежутке x < 1 . Попробуем продолжить его на больший
промежуток, последовательно используя Теорему 1. Рассмотрим следующий процесс.
2
r
1
r
1
4
⎛4
⎞
,
=>
H (r ) =
.
M =⎜ +r⎟
x1 = ,
H=
y1 = y ( x1 ) =
= ,
2
1 3
M
4
3
⎝
⎠
4
⎛
⎞
1−
⎜ +r⎟
4
⎝3
⎠
H ′(r ) = 0
=>
r=
⎛4⎞ 3
H1 = H ⎜ ⎟ = ,
⎝ 3 ⎠ 16
4
,
3
⎡ 1 3⎤
x ∈ ⎢0, + ⎥ .
⎣ 4 16 ⎦
Далее
7
x2 = ,
16
1
16
y2 = y ( x2 ) =
= ,
7
9
1−
16
⎛ 16
⎞
M =⎜ +r⎟
⎝ 9
⎠
r
,
H=
M
2
=>
H (r ) =
r
⎛ 16
⎞
⎜ +r⎟
9
⎝
⎠
2
.
16
⎛ 16 ⎞ 9
⎡ 1 3 9⎤
,
,
H2 = H ⎜ ⎟ =
x ∈ ⎢0, + + ⎥ .
9
⎝ 9 ⎠ 64
⎣ 4 16 64 ⎦
Итак, мы построили продолжение решения на больший интервал. Заметим, что на k том шаге описанного процесса
H ′(r ) = 0
=>
r=
3k
H k = k +1 , k = 0,1, …
4
∞
и
∞
k
3k
1 ∞ ⎛3⎞
1 1
H k = ∑ k +1 = ∑ ⎜ ⎟ =
= 1.
∑
4 k =0 ⎝ 4 ⎠
4 1− 3
k =0
k =0 4
4
Замечание 3.
Метод последовательных приближений Пикара активно используется при
численном решении задачи Коши. После n итераций получается приближенное решение yn ( x) ,
тем более точное, чем больше n.
Пример 3.
Рассмотрим снова задачу Коши
dy
= y2
dx
y (0) = 1
1
1
=
.
x −1 1− x
Получим решение рассматриваемой задачи, применяя метод последовательных
приближений Пикара. Определим итерационный процесс так:
dyn
= yn2−1 ( x )
dx
yn (0) = 1 ,
n = 1, 2, 3,... .
В качестве нулевого приближения возьмем y0 ( x) = 1 . На каждой итерации задача разрешима
Ее точное решение было получено выше (см. пример 2), и имеет вид y ( x) = −
при x ∈ [ 0, H ] и ее решение имеет вид:
x
yn ( x) = 1 + ∫ yn2−1 (ξ ) d ξ .
0
Проделаем несколько первых итераций:
x
y1 ( x) = 1 + ∫ 1 d ξ = 1 + x ,
0
x
x
y2 ( x) = 1 + ∫ y12 (ξ ) d ξ = 1 + ∫ (1 + ξ ) d ξ = 1 + x + x 2 +
0
x
2
0
x3
,
3
2 x 4 x5 x6 x7
+ + + .
3
3 9 63
0
Продолжая этот итерационный процесс, мы все точнее будем приближаться к функции
∞
1
y ( x) = ∑ x n =
x < 1.
,
1− x
n=0
y3 ( x) = 1 + ∫ y22 (ξ ) d ξ = 1 + x + x 2 + x 3 +
Упражнение 1.
Найдите точное решение задачи Коши
dy
= y3 ,
dx
y (0) = 1 .
Методом последовательных приближений Пикара найдите y1 ( x) и y2 ( x) . Далее с помощью
Теоремы 1 оцените промежуток существования решения и попробуйте построить продолжение
решения на больший интервал.
Замечание 4.
Рассмотрим задачу Коши (1)
dy
= f ( x, y )
,
dx
y ( x0 ) = y0
в случае, когда функция f ( x, y ) в окрестности точки ( x0 , y0 ) раскладывается в степенной ряд
f ( x, y ) = ∑∑ f jk ( x − x0 )
j ≥0 k ≥0
j
( y − y0 )
k
.
Такая функция f ( x, y ) называется аналитической. Справедливо следующее утверждение.
Теорема 3. Если функция f ( x, y ) аналитическая в окрестности точки ( x0 , y0 ) , то в некоторой
окрестности этой точки существует единственное аналитическое решение задачи Коши (1) вида
∞
y ( x) = y0 + ∑ ck ( x − x0 ) .
k =1
k
Этот ряд определяет решение задачи Коши лишь при тех значениях переменной x ,
которых он сходится.
в
окрестности
точки
( x0 , y0 )
в
степенной
Разложив
f ( x, y )
f ( x, y ) = ∑∑ f jk ( x − x0 )
j ≥0 k ≥0
j
( y − y0 )
k
, подставив в обе части ряд для
при
ряд
y ( x) и приравняв
коэффициенты при одинаковых степенях x − x0 , получим линейную систему уравнений для
определения коэффициентов ck . В силу Теоремы 3 эта система имеет единственное решение.
Аналогичная теорема имеет место и для задачи Коши для ОДУ n-го порядка,
разрешенного относительно старшей производной:
y ( n ) = f x, y, y′,… , y ( n −1) ,
(
)
y ( x0 ) = y0 , y′( x0 ) = y1 , …. , y (
в случае, когда правая часть
n −1)
( x0 ) = yn −1
(
f x, y, y′,… , y ( n −1)
)
является аналитической функцией в
окрестности точки ( x0 , y0 , y1 ,… , yn −1 ) .
Пример 4.
Рассмотрим еще раз задачу Коши
dy
= y2
dx
,
y (0) = 1
1
(см. пример 2).
1− x
Построим ее решение, используя Теорему 3. Обозначив z ( x ) = y ( x) − 1 , для функции
z ( x ) получим задачу Коши:
dz
2
= ( z + 1) = 1 + 2 z + z 2
dx
z (0) = 0
В окрестности точки (0, 0) выполнены все условия Теоремы 3, что позволяет искать
решение в виде степенного ряда
y ( x) =
точным решением которой является функция
∞
z ( x) = ∑ ck x k .
k =1
Подставив данный ряд в обе части уравнения, получим
2
⎛ ∞
⎞
kck x = 1 + 2∑ ck x + ⎜ ∑ ck x k ⎟ .
∑
k =1
k =1
⎝ k =1
⎠
Выпишем несколько первых слагаемых сумм справа и слева:
c1 + 2c2 x + 3c3 x 2 + … = 1 + 2c1 x + 2c2 x 2 + 2c3 x 3 + … + c1 x 2 + 2c1c2 x 3 + … . .
Приравнивая коэффициенты при одинаковых степенях x , найдем
c1 = 1, c2 = 1, c3 = 1, …, ck = 1,… .
∞
∞
k −1
∞
k
x
,
x <1,
1− x
k =1
x
1
.
−1 =
y ( x) = z ( x) − 1 =
1− x
1− x
Таким образом, z ( x) = x + x 2 + x3 + .... =
∑x
k
=
следовательно,
Лекция 4
§3.
Непрерывная зависимость решения задачи Коши от параметров и
начальных условий.
10.
Постановка задачи.
Простейшим примером параметра, от которого зависит решение задачи Коши
dy
= f ( x, y )
,
dx
y ( x0 ) = y0 = μ
является начальное значение. Выбирая различные значения y0 = μ , получаем семейство
решений y ( x, μ ) , зависящее от параметра μ .
От различных параметров могут зависеть также и правые части уравнения, т.е.
f = f ( x, y , μ ) . При этом часто некоторые величины, входящие в правую часть уравнения,
определяются экспериментально и, следовательно, известны с погрешностью. Поэтому вопрос
о непрерывной зависимости решений дифференциальных уравнений от параметров важен и с
практической точки зрения.
Покажем, что изучение зависимости решения от параметров, содержащихся в правой
части и начальных условиях, может быть проведено единым образом. Действительно, если в
задаче Коши
dy
= f ( x, y )
dx
y ( x0 ) = y0 = μ
сделать замену z = y − μ , то для новой функции z получим задачу
dz
= f ( x, z + μ ) ≡ f ( x , z , μ )
,
dx
z ( x0 ) = 0
в которой от параметра теперь зависит правая часть уравнения. Поэтому далее будем
рассматривать следующую задачу Коши с параметром в правой части:
dy
= f ( x, y , μ )
.
(1)
dx
y ( x0 ) = y0
20.
Теоремы о непрерывной зависимости решения от параметра.
Рассмотрим задачу (1) при следующих условиях.
(У1). Функция f ( x, y , μ ) определена и непрерывна по совокупности переменных в области
D = {| x − x0 | ≤ a, | y − y0 | ≤ b, | μ − μ0 | ≤ c}
и, следовательно, ограничена, т.е. существует
постоянная M = max | f ( x, y , μ | .
D
(У2). Функция f ( x, y , μ ) удовлетворяет в области D условию Липшица
f ( x, y1 , μ ) − f ( x, y2 , μ ) ≤ N y1 − y2 ,
где постоянная N не зависит от параметра μ на отрезке | μ − μ0 | ≤ c .
Теорема 1.
Пусть выполнены условия (У1) и (У2).
⎧ b ⎫
Тогда на отрезке [ x0 , x0 + H ] , где H = min ⎨a, ⎬ , существует единственное решение задачи
⎩ M⎭
(1), непрерывное по параметру μ при | μ − μ0 | ≤ c .
этой теоремы дословно повторяет доказательство теоремы существования
Доказательство
и единственности решения задачи Коши (см. §2) и основано на равномерной сходимости
функциональной последовательности
{ yn ( x, μ )} :
x
yn ( x, μ ) = y0 + ∫ f (ξ , yn (ξ , μ ), μ ) dξ .
x0
Замечание. Результат теоремы очевидным образом обобщается на случай, когда правая часть
зависит от нескольких параметров, т.е. μ = {μ1 , μ2 ,..., μm } , среди которых μi = y0 .
Теорема 2. Пусть функция f ( x, y , μ ) непрерывна и при каждом | μ − μ0 | ≤ c удовлетворяет
условию Липшица в полосе [ x0 , x0 + a ], y ∈ R .
Тогда задача (1) имеет единственное решение на отрезке [ x0 , x0 + a ] , непрерывное по
параметру μ .
Для доказательства этой теоремы достаточно повторить доказательство теоремы 2 из §2.
§4.
Теоремы сравнения. Метод дифференциальных неравенств.
10.
Постановка задачи.
Теоремы сравнения, лежащие в основе принципа сравнения, играют важную роль в
исследовании различных классов нелинейных задач как для обыкновенных дифференциальных
уравнений, так и для уравнений в частных производных. Они гарантируют существование (а
при некоторых естественных требованиях и единственность) решения задач при условии
существования так называемых верхних и нижних решений. Этот подход в исследовании
нелинейных дифференциальных уравнений носит также название метода дифференциальных
неравенств и является развитием идей метода «вилки» решения нелинейных конечных
уравнений.
Указанный метод будет продемонстрирован нами на примере решения задачи Коши для
скалярного ОДУ первого порядка. Эта задача впервые с точки зрения метода
дифференциальных неравенств была рассмотрена С.А. Чаплыгиным в начале 20-х годов
прошлого века и положила начало одному из наиболее эффективных методов качественной
теории нелинейных дифференциальных уравнений. Отметим, что важность этих результатов
подчеркивалась одним из основоположников курса дифференциальных уравнений на
физическом факультете МГУ академиком А.Н. Тихоновым, по инициативе которого теоремы
Чаплыгина были включены в основной учебник для студентов-физиков [1].
Рассмотрим скалярную задачу Коши вида
dy
0< x≤a
= f ( x, y )
(1)
dx
y (0) = y0 .
Основной особенностью задачи (1) является то, что она рассматривается
на
фиксированном промежутке времени 0 ≤ x ≤ a и значение a входит в постановку задачи. Такая
постановка является естественной для приложений, где задача (1) может выступать в качестве
математической модели. Классическая теорема существования (см. Теорему 1 из предыдущей
лекции) и единственности, являющаяся локальной и гарантирующая существование решения в
некоторой достаточно малой окрестности начальной точки, как правило, становится мало
пригодной.
Напомним формулировки двух теорем, доказанных в предыдущей лекции (см. Теоремы
1 и 2 из §2, лекция 3).
Теорема 1.
Пусть
функция
f ( x, y )
определена
и
непрерывна
в
прямоугольнике
D = {0 ≤ x ≤ a, y − y0 ≤ b} и, следовательно, существует постоянная M = max f ( x, y ) . Пусть,
D
кроме того, функция f ( x, y ) удовлетворяет в области D условию Липшица по переменной y :
f ( x, y1 ) − f ( x, y2 ) ≤ N y1 − y2 .
⎛ b ⎞
Тогда на промежутке 0 ≤ x ≤ min ⎜ a, ⎟ задача Коши (1) имеет единственное решение.
⎝ M⎠
Очевидно, что при больших значениях M сформулированная теорема дает слишком
грубую оценку промежутка существования решения. Это особенно ярко проявляется для так
1
f ( x, y ) , где μ называемых сингулярно возмущенных задач, когда правая часть имеет вид
μ
малый параметр. В этом случае M ∼
1
μ
и, следовательно, промежуток существования решения,
гарантированный этой теоремой, имеет оценку H ~ μ , т.е. является асимптотически малым.
Теорема 2.
Пусть функция f ( x, y ) определена, непрерывна и удовлетворяет
Липшица по переменной y в полосе {0 ≤ x ≤ a, − ∞ < y < +∞} .
условию
Тогда на промежутке 0 ≤ x ≤ a задача Коши (1) имеет единственное решение.
Данная теорема уже не является локальной, однако класс функций f ( x, y ) ,
удовлетворяющих сформулированным в ней условиям, достаточно узкий. Поэтому во многих
случаях более эффективным для исследования задачи (1) является метод дифференциальных
неравенств Чаплыгина. Изложение этого подхода начнем со следующего классического
результата.
20.
Теорема Чаплыгина о дифференциальных неравенствах.
Теорема 3 (сравнения, Чаплыгина).
Пусть существует классическое решение y( x) задачи (1) и существует функция z ( x) такая,
что
dz
z ( x) ∈ C1 ( 0; a ] ∩ C [ 0; a ] ,
z (0) < y0 и
< f ( x, z ( x)), x ∈ ( 0; a ] .
dx
Тогда при всех x ∈ [0; a] имеет место неравенство z ( x) < y( x) .
Доказательство. При x = 0 неравенство выполняется. Пусть оно первый раз нарушается в
точке x1 ∈ ( 0, a ] , т.е. имеем z ( x1 ) = y ( x1 ). Это означает, что при x = x1 кривые y = y( x) и
y = z ( x) либо пересекаются, либо касаются. Следовательно,
dz
dy
( x1 ) ≥
( x1 ) = f ( x1 , y ( x1 )) = f ( x1 , z ( x1 )),
dx
dx
что противоречит условию теоремы.
Замечание.
С.А. Чаплыгин называл функцию
определяется верхняя функция.
z ( x) нижней функцией. Аналогично
30.
Теорема Чаплыгина о существовании и единственности решения задачи Коши.
Используя результат Теоремы 3 можно доказать теорему существования и
единственности решения задачи (1). Для этого нам понадобится определение нижнего и
верхнего решений. Так в современной литературе принято называть нижние и верхние функции
Чаплыгина.
Определение. Функция α ( x) ∈ C1 ( 0, a ] ∩ C[0, a] называется нижним решением задачи (1), если
выполнены неравенства
dα
< f ( x, α ( x )), 0 < x ≤ a, α (0) < y0 .
dx
Функция β ( x) ∈ C1 ( 0, a ] ∩ C[0, a] называется верхним решением задачи (1), если выполнены
неравенства
dβ
> f ( x, β ( x )),
dx
0 < x ≤ a,
β (0) > y0 .
Замечание. Используя схему доказательства теоремы сравнения, можно показать, что между
нижним решением α ( x ) и верхним решением β ( x ) имеет место неравенство α ( x ) < β ( x ) .
Теорема 4 (существования и единственности, Чаплыгина).
Пусть существует нижнее α ( x ) и верхнее β ( x ) решения задачи (1), такие что α ( x ) < β ( x ) ,
x ∈ [ 0; a ] .
Пусть функция
f ( x, y ) непрерывна и удовлетворяет условию Липшица по
переменной y т.е. при каждом x ∈ [ 0; a ] выполнено неравенство
f ( x, y1 ) − f ( x, y2 ) ≤ N y1 − y2 ,
y1 , y2 ∈ [α ( x), β ( x)] .
Тогда задача Коши (1) имеет единственное решение y ( x) , причем
α ( x ) < y ( x ) < β ( x ),
0≤ x≤a.
Доказательство. Продолжим f ( x, y ) так, чтобы она была непрерывна и удовлетворяла
условию Липшица в полосе
{0 ≤ x ≤ a,
− ∞ < y < +∞} , и рассмотрим вместо (1) задачу
dy
= h( x, y ),
dx
y (0) = y0 ,
0 < x ≤ a,
(2)
где функция h( x, y ) выбрана, например, так:
⎧ f ( x, β ( x)) + ( y − β ( x)), y ≥ β
⎪
h( x, y ) = ⎨ f ( x, y ),
α ≤ y≤β
⎪ f ( x, α ( x)) + ( y − α ( x)),
y ≤α
⎩
( 0 ≤ x ≤ a ).
Очевидно, что функция h( x, y ) удовлетворяет условию Липшица с константой
L = max( N ;1) , где N - постоянная Липшица функции f ( x, y ) , введенная в условии теоремы.
Поэтому, в силу Теоремы 2 решение задачи (2) существует и единственно. Это решение,
лежащее в начальный момент между нижним и верхним решением, не может покинуть область
между ними в силу Теоремы 3. Следовательно, для указанных значений y имеет место
равенство h( x, y ) = f ( x, y ) , т.е. решение задачи (2) является решением задачи (1).
Замечание 1. Можно показать, что в определении верхнего и нижнего решений допустимы
нестрогие знаки неравенств. В частности, в качестве нижнего (верхнего) решения задачи (1)
может быть взято решение уравнения в (1) y* ( x) , которое в начальный момент
y * (0) < y0
( y (0) > y ) .
*
0
Действительно, в этом случае предположение о том, что кривая
y = y ( x) пересекает кривую y = y ( x) в некоторой точке x1 , приводит к нарушению условия
единственности решения в окрестности этой точки.
*
Замечание 2. Пусть нижнее и верхнее решения определены на множестве 0 ≤ x < ∞ , а функция
f ( x, y ) непрерывна и удовлетворяет условию Липшица по переменной y с константой N , не
зависящей от x . Тогда Теорема 4 остается справедливой на всем промежутке 0 ≤ x < ∞ . Этот
факт будет использован далее при изучении некоторых задач теории устойчивости.
40.
Примеры.
Пример 1. Рассмотрим начальную задачу
dy
= − y 2 , 0 < x ≤ a,
dx
y (0) = y0 > 0,
1
.
точное решение которой есть y ( x) =
1
x+
y0
Классическая теорема существования и единственности дает оценку для промежутка
1
(убедитесь в этом самостоятельно). Заметим также, что
существования решения 0 ≤ x ≤
4 y0
− ∞ < y < +∞} не выполняется.
Выберем в качестве нижнего решения функцию α = 0 (см. замечание 1). Действительно,
dα
соответствующее определение выполняется, так как
− f ( x, 0) = 0 .
dx
В качестве верхнего решения возьмем β ( x) = d = const > y0 . Определение верхнего
dβ
решения тоже выполнено, так как
− f ( x, β ) = 0 + d 2 > 0 .
dx
Так как частная производная f y ( x, y ) = −2 y ограничена при y ∈[0; d ] и 0 ≤ x ≤ a , где
условие Липшица в полосе
{0 ≤ x ≤ a,
a > 0 - любое число, то функция f ( x, y ) = − y 2 удовлетворяет условию Липшица в этой области.
Отсюда на основании Теоремы 4 можно утверждать, что при всех 0 ≤ x < ∞ существует
решение y ( x) , причем 0 ≤ y ( x ) ≤ d .
Пример 2. Рассмотрим начальную задачу
dy
= f ( x, y ),
0< x≤a
dx
y (0) = y0 ,
где функция f ( x, y ) удовлетворяет условиям Теоремы 2 и при каждом x имеет вид,
изображенный на рисунке.
Пусть ϕ1 ( x) - наибольший отрицательный корень уравнения f ( x, y) = 0 , ϕ2 ( x) наименьший
положительный
корень
этого
уравнения.
Обозначим
*
ϕ* = max ϕ1 ( x),
ϕ = min ϕ2 ( x) и предположим, что начальное значение y0 удовлетворяет
[0, a ]
[0, a ]
условию ϕ* < y0 < ϕ . Тогда существует постоянная ε > 0 такая, что ϕ* + ε < y0 < ϕ * − ε .
Выберем в качестве нижнего решения функцию α = ϕ* + ε , а в качестве верхнего функцию
*
β = ϕ* − ε .
В силу того, что f (α ) > 0 , а f ( β ) < 0 (см. рисунок), соответствующие
дифференциальные неравенства выполнены. Поэтому из теоремы Чаплыгина (Теорема 4)
следует, что существует решение рассматриваемой задачи y( x) , удовлетворяющее
неравенствам ϕ* < y ( x ) < ϕ * .
Лекция 5
§5. Теорема существования и единственности решения задачи Коши для
нормальной системы ОДУ.
10. Постановка задачи.
Задача Коши для нормальной системы ОДУ
•
x = f ( t, x ) ,
(1)
состоит в отыскании решения x = x (t ) , удовлетворяющего начальным условиям
x (t0 ) = x0 .
В (1-2) введены обозначения
(2)
x = { x1 , … , x m } , f ( t , x ) = { f 1 ( t , x ) , … , f m ( t , x )} , где верхние
индексы - номера координат вектора, а вектор–функция f ( t , x ) задана в области G
мерного пространства переменных
y ≡ y Rm =
(У1)
m
∑( y )
i 2
( t, x ) .
( m + 1)
–
Далее также будем использовать норму вектора
.
i =1
Предположим, что выполнены следующие условия.
Пусть f ( t , x ) ∈ C (G ) , т.е. существует постоянная M = max f ( t , x ) , следовательно
G
f ( t , x ) ≤ M – равномерно ограничена в G.
(У2)
Пусть f ( t , x ) в любой замкнутой ограниченной подобласти g ⊂ G удовлетворяет
условию Липшица по переменой x , т.е. существует постоянная Липшица N > 0 (не
зависящая ни от x , ни от y ) такая, что для всех ( t , x ) , ( t , y ) ∈ g выполняется неравенство
f (t, x ) − f (t, y ) ≤ N x − y .
Замечание. Это условие будет выполнено, в частности, если существуют частные производные
∂f i ( x, y )
∈ C (G ) .
∂x j
Лемма 1. Пусть вектор–функция f ( t , x ) удовлетворяет (У1) и ( t0 , x0 ) ∈ G . Тогда решение
задачи Коши для системы (1) эквивалентно решению интегрального уравнения
t
x ( t ) = x0 + ∫ f (τ , x (τ ) ) dτ
(3)
t0
в классе непрерывных функций.
Доказательство. Пусть x ( t ) – решение (1-2), заданное на некотором интервале T
( t0 ∈ T ) .
Тогда при всех t ∈ T имеет место тождество
•
x ( t ) = f ( t, x ( t ) ) ,
интегрируя которое по t с учетом (2), получим (3) при t ∈ T .
Верно и обратное утверждение: если x ( t ) ∈ C (T ) и удовлетворяет (3), то ввиду
непрерывности f (τ , x )
•
x ( t ) = f ( t , x ( t ) ) , x ( t0 ) = x0 ,
т.е. x (t ) есть решение системы (1) с начальным условием (2).
•
•
Лемма 2. Пусть на отрезке t ∈ [ a, b ] (b > a) выполнено y ( t ) = x ( t ) и z ( t ) = x ( t ) . Тогда
y (b ) − y ( a ) ≤ z (b) − z ( a ) .
Доказательство.
Положим теперь
•
Пусть y ( b ) − y ( a ) = 0 , тогда z ( b ) − z ( a ) ≥ 0 , поскольку z ( t ) = x ( t ) ≥ 0 .
y ( b ) − y ( a ) ≠ 0 и введем единичный вектор e =
Рассмотрим функцию f ( t ) = ( y ( t ) , e ) − z ( t ) и найдем её производную:
y (b) − y ( a )
y (b) − y ( a )
,
e = 1.
•
⎛•
⎞ •
f (t ) = ⎜ y (t ) , e ⎟ − z (t ) = ( x (t ) , e ) − x (t ) ≤ x (t ) e − x (t ) = 0 .
⎝
⎠
Таким образом, f ( t ) – невозрастающая функция, т.е. f ( a ) ≥ f ( b ) и, следовательно,
( y ( a ) , e ) − z ( a ) ≥ ( y ( b ) , e ) − z ( b ) или ( y ( b ) − y ( a ) , e ) ≤ z ( b ) − z ( a ) .
y ( b ) − y ( a ) = ( y ( b ) − y ( a ) , e ) ≤ z ( b ) − z ( a ) , что и требовалось доказать.
Поэтому
Следствие. Если вектор–функция x ( t ) ∈ C [ a, b ] , то при t ∈ [ a, b ] существует вектор–
t
функция
t
t
a
a
∫ x (τ ) dτ , для модуля которой имеет место оценка ∫ x (τ ) dτ ≤ ∫ x (τ ) dτ .
a
t
Доказательство.
t
•
Пусть y ( t ) = ∫ x (τ ) dτ , тогда y ( t ) = x ( t ) , y ( a ) = 0 . Пусть z ( t ) = ∫ x (τ ) dτ ,
a
a
•
тогда z ( t ) = x ( t ) , z ( a ) = 0 . Из Леммы 2 вытекает, что
t
t
a
a
∫ x (τ ) dτ = y ( t ) − y ( a ) ≤ z ( t ) − z ( a ) = z ( t ) = ∫ x (τ ) dτ .
20 .
Доказательство существования решения методом Пикара (последовательных
приближений).
Теорема 1.
Пусть выполнены условия (У1) и (У2). Тогда для всех
( t0 , x0 ) ∈ G
существует
единственное решение задачи (1-2), определенное на некотором отрезке t − t0 ≤ H .
Доказательство. На основании Леммы 1 решение задачи Коши для системы (1) эквивалентно
решению интегрального уравнения (3), решение которого будем строить методом
последовательных приближений Пикара. Последовательные приближения (итерации) xn ( t ) (
t − t0 ≤ H , H > 0 - будет определено позже), определим рекуррентно по формуле
t
xn ( t ) = x0 + ∫ f (τ , xn−1 (τ ) ) dτ ,
n = 0,1, 2,... ,
(4)
t0
где в качестве нулевого приближения возьмем начальное значение x0 ( t ) ≡ x0 .
Замечание. Для того чтобы функциональная последовательность { xn ( t )} была определена для
всех n = 0,1, 2,... необходимо, чтобы каждая кривая x = xn ( t ) при t − t0 ≤ H целиком лежала в
G, иначе, интеграл в правой части (4) не будет определен.
Покажем,
как
этого
можно
добиться.
Выберем
замкнутый
цилиндр
Q = [t0 − h, t0 + h] × x − x0 ≤ r : Q ⊂ G (это всегда возможно, поскольку G открытое множество).
Поскольку f ( t , x ) ∈ C (G ) , то f ( t , x ) ≤ M – равномерно ограничена в цилиндре Q. Выберем
⎛ r ⎞
H = min ⎜ h, ⎟ и рассмотрим цилиндр Q1 = [t0 − H , t0 + H ] × x − x0 ≤ r : Q1 ⊂ Q (убедитесь в
⎝ M⎠
этом самостоятельно). Очевидно, что кривая x = x0 ( t − t0 ≤ H ) лежит в Q1. Пусть кривая
( t −t
x = xn ( t )
0
≤ H ) лежит в Q1, т.е. xn ( t ) − x0 ≤ r при t − t0 ≤ H . Покажем, что тогда и
кривая x = xn +1 ( t )
( t −t
xn +1 ( t ) − x0 ≤
≤ H ) не выходит из Q1. Действительно
0
t
t
t
∫ f (τ , x (τ ) ) dτ ≤ ∫ f (τ , x (τ ) ) dτ
n
≤M
n
t0
t0
∫ dτ
= M t − t0 ≤ MH ≤
t0
Mr
=r,
M
xn ( t ) ∈ C [t0 − H , t0 + H ]
(завершите доказательство
самостоятельно). Итак, построена функциональная последовательность непрерывных при
t − t0 ≤ H функций, причем { xn ( t )} ⊂ Q1 .
следовательно каждая из функций
Лемма 3. Последовательность функций { xn ( t )} сходится равномерно на отрезке
t − t0 ≤ H .
Доказательство. Рассмотрим функциональный ряд
S ( t ) = x0 ( t ) + ( x1 ( t ) − x0 ( t ) ) + ( x2 ( t ) − x1 ( t ) ) + … + ( xn ( t ) − xn −1 ( t ) ) + … ,
т.е. Sn ( t ) = xn ( t ) . Для членов этого ряда из (4) и (У1) легко получаются оценки:
t
xn +1 ( t ) − xn ( t ) ≤
∫
f (τ , xn (τ ) ) − f (τ , xn −1 ) dτ ≤ L
t0
t
∫ x (τ ) − x
n −1
n
dτ ,
n = 0,1, 2,... .
t0
В частности, при n = 0
x1 ( t ) − x0 ( t ) ≤
t
∫ f (τ , x ) dτ
≤ M t − t0 ≤ MH ;
0
t0
при n = 1
x2 ( t ) − x1 ( t ) ≤
t
t
∫ f (τ , x (τ ) ) − f (τ , x ) dτ
1
≤L
0
t0
∫ x (τ ) − x
1
t0
0
t
dτ ≤ ML ∫ τ − t0 dτ =
t0
2
= ML
при n = 2
x3 ( t ) − x2 ( t ) ≤
t − t0
H2
≤ ML
;
2
2!
t
∫ f (τ , x (τ ) ) − f (τ , x (τ ) ) dτ
2
1
t
≤L
t0
∫
t0
t
L2
2
x2 (τ ) − x1 (τ ) dτ ≤ M
τ − t0 dτ =
∫
2! t0
3
Далее, пусть для n = k верно
L2 t − t0
H3
=M
≤ ML2
.
2! 3
3!
xk +1 ( t ) − xk ( t ) ≤ ML
k −1
Тогда при n = k + 1 получим
xk + 2 ( t ) − xk +1 ( t ) ≤
t
∫
f (τ , xk +1 (τ ) ) − f (τ , xk (τ ) ) dτ ≤ L
t0
k
k
t − t0
k −1 H
≤ ML
.
k!
k!
t
∫
xk +1 (τ ) − xk (τ ) dτ ≤ M
t0
t
Lk
k
τ − t0 dτ =
∫
k ! t0
k +1
k +1
Lk t − t0
k H
.
=M
≤ ML
k ! k +1
( k + 1)!
Таким образом, методом математической индукции доказано, что при t − t0 ≤ H для всех
n = 0,1, 2,... верно
n
t − t0
Hn
xn ( t ) − xn −1 ( t ) ≤ ML
≤ MLn −1
n!
n!
n
∞
H
M
= ( e LH − 1) сходится. Следовательно, по
Заметим, что числовой ряд ∑ MLn −1
n!
L
n =1
n −1
признаку Вейерштрасса функциональный ряд S ( t ) сходится абсолютно и равномерно на
множестве t − t0 ≤ H , а значит функциональная последовательность
{ x ( t )}
n
также сходится
равномерно на множестве t − t0 ≤ H .
Лемма 4. Функциональная последовательность
интегрального уравнения (3).
Доказательство. Поскольку все
{ x ( t )}
{ x ( t )}
n
сходится к непрерывному решению
непрерывные вектор–функции, а функциональная
n
последовательность { xn ( t )} ⇒ x ( t ) , то x ( t ) ∈ C ( t − t0 ≤ H ) .
n →∞
Переходя к пределу при n → ∞ в неравенствах
xn ( t ) − x0 ≤ r n=1,2,…. , получим, что
x ( t ) − x0 ≤ r при t − t0 ≤ H , т.е. кривая { x = x ( t )} ⊂ Q1 и интеграл
t
∫ f (τ , x (τ ) ) dτ
существует
t0
при t − t0 ≤ H .
f ( t , x ) ∈ C ( G ) , то она равномерна непрерывна в цилиндре Ц1, т.е.
Поскольку функция
∀ ε > 0 ∃δ > 0 , такое что f ( t , x ) − f ( t , y ) < ε для ∀ ( t , x ) , ( t , y ) ∈ Q1 таких, что x − y < δ .
{x ( t )} ⇒ x ( t ) на отрезке t − t ≤ H , то для такого
всех t ∈ { t − t ≤ H } выполнено x ( t ) − x ( t ) ≤ δ .
Поскольку
n
0
n →∞
0
n
Следовательно,
при
n>N
t − t0 ≤ H
и
{ f ( t, x ( t ) )} ⇒ f ( t, x ( t ) ) на отрезке
n
δ > 0 ∃ N > 0 : n > N и при
n →∞
справедливо
f ( t , x ( t ) ) − f ( t , xn ( t ) ) < ε ,
т.е.
t − t0 ≤ H .
Кроме того, равномерная сходимость функциональной последовательности из непрерывных
функций { xn ( t )} является достаточным условием для перехода к пределу под знаком интеграла
в выражении (4):
t
t
t
t0
t0
x ( t ) = lim xn ( t ) = x0 + lim ∫ f (τ , xn −1 (τ ) ) dτ = x0 + ∫ lim f (τ , xn −1 (τ ) ) dτ = x0 + ∫ f (τ , x (τ ) ) dτ .
n →∞
n →∞
n →∞
t0
t
Т.е. x ( t ) = x0 + ∫ f (τ , x (τ ) ) dτ – предел последовательных приближений { xn ( t )} удовлетворяет
t0
интегральному уравнению (3), эквивалентному задаче Коши (1), (2). Существование решения
доказано.
30.
Доказательство единственности решения.
Лемма 5 (Гронуолла).
Пусть вектор–функция x ( t ) ∈ C [ a, b ] для ∀ t , t0 ∈ [ a, b]
удовлетворяет неравенству
x (t ) ≤ A + B
t
∫ x (τ ) dτ
t0
где постоянные A, B ≥ 0 .
Тогда
x ( t ) ≤ Ae
B t − t0
.
,
(5)
Для определенности рассмотрим t > t0 . Пусть M = max x ( t ) . Тогда из (5)
Доказательство.
t∈[ a ,b ]
следует оценка
t
x ( t ) ≤ A + B ∫ Mdτ = A + BM ( t − t0 ) .
t0
Подставляя в эту оценку в правую часть неравенства (5), получим
t
x ( t ) ≤ A + B ∫ ⎡⎣ A + BM ( t − t0 ) ⎤⎦ dτ = A + AB ( t − t0 ) + B
2
( t − t0 )
M
2
2
t0
Полученную оценку опять подставим в правую часть (5):
2
t ⎡
t − t0 ) ⎤
(
2
x ( t ) ≤ A + B ∫ ⎢ A + AB ( t − t0 ) + B M
⎥ dτ =
2
⎥⎦
t0 ⎢
⎣
= A + AB ( t − t0 ) + AB
2
( t − t0 )
2!
2
( t − t0 )
+B M
3
3
3!
.
Повторим эту подстановку n раз:
n
n +1
⎛
⎞
t − t0 )
(
n ( t − t0 )
n +1
.
x ( t ) ≤ A ⎜ 1 + B ( t − t0 ) + … + B
⎟+ B M
⎜
⎟
+
n
!
n
1
!
(
)
⎝
⎠
Переходя к пределу при n → ∞ получим x ( t ) ≤ Ae B t −t0 .
Следствие. Пусть вектор–функция x ( t ) ∈ C [ a, b ] для ∀ t , t0 ∈ [ a, b] удовлетворяет неравенству
x (t ) ≤ B
t
∫ x (τ ) dτ
, где постоянная B ≥ 0 . Тогда x ( t ) ≡ 0 .
t0
Пусть выполнены условия (У1) и (У2).
Лемма 6.
Тогда, если x ( t ) и y ( t ) два решения задачи Коши (1), (2), определенные на некоторых
интервалах, и совпадающие в некоторой точке t1 : x ( t1 ) = y ( t1 ) = x1 , то x ( t ) = y ( t ) в некоторой
окрестности t − t1 ≤ h этой точки.
Доказательство.
Поскольку x ( t ) и y ( t ) – решения системы (1), то
t
x ( t ) = x1 + ∫ f (τ , x (τ ) ) dτ ,
t1
t
y ( t ) = x1 + ∫ f (τ , y (τ ) ) dτ .
t1
Тогда их разность u ( t ) = x (t ) − y (t ) удовлетворяет интегральному уравнению
t
u ( t ) = x (t ) − y (t ) = ∫ ⎡⎣ f (τ , x (τ ) ) − f (τ , y (τ ) ) ⎤⎦ dτ .
(6)
t1
Пусть цилиндр
множество).
Q1 = { t − t1 ≤ h1 × x − x1 ≤ r} ⊂ G (это всегда возможно, поскольку G открытое
Поскольку x ( t ) и y ( t ) непрерывные функции, то ∃ h2 > 0 , такое, что при
t − t1 ≤ h2 имеет место
x ( t ) − x1 ≤ r , y ( t ) − x1 ≤ r
(7)
Выберем h = min ( h1 , h2 ) . Тогда цилиндр Q = { t − t1 ≤ h × x − x1 ≤ r} ⊂ G и при t − t1 ≤ h
выполнены неравенства (7). В силу следствия из Леммы 4 из (6) следует, что
t
u ( t ) = x (t ) − y (t ) ≤ ∫ f (τ , x (τ ) ) − f (τ , y (τ ) ) dτ .
(8)
t1
Из неравенств (7) следует, что точки (τ , x (τ ) ) , (τ , y (τ ) ) , принадлежат цилиндру Q ,
который является замкнутым, ограниченным множеством. Поэтому можно воспользоваться
условием Липшица
t
t
t
t1
t1
t1
u ( t ) = x (t ) − y (t ) ≤ ∫ f (τ , x (τ ) ) − f (τ , y (τ ) ) dτ ≤ L ∫ x (τ ) − y (τ ) dτ = L ∫ u (τ ) dτ
и на основании следствия из леммы 5 получить, что u ( t ) = 0 , т.е. x ( t ) = y ( t ) при t − t1 ≤ h .
Пусть выполнены условия (У1) и (У2). Тогда, если x ( t ) и y ( t ) два решения
Лемма 7.
задачи Коши (1), (2), определенные на интервале t ∈ ( a, b ) и x ( t0 ) = y ( t0 ) при t0 ∈ ( a, b ) , то
x ( t ) = y ( t ) при ∀t ∈ ( a, b ) .
Доказательство.
Предположим
обратное,
т.е.
пусть
t1 ∈ ( a, b )
существует
(для
определенности будем считать, что t1 > t0 ), такое, что x ( t1 ) ≠ y ( t1 ) .
M = {t : t ∈ ( a, b ) ∧ t < t1 ∧ x ( t ) = y ( t )} и докажем, что оно
Рассмотрим множество
замкнуто. Действительно, пусть {tk } ⊂ M , {tk } → t ' – предельная точка множества M , тогда
k →∞
x ( t k ) = y ( tk )
и
в
силу
непрерывности
x ( t ') = lim x ( tk ) = lim y ( tk ) = y ( t ') .
k →∞
Так как
k →∞
x (t )
функций
и
y (t )
имеет
место
tk < t1 , то t ' < t1 (равенство t ' = t1 невозможно,
поскольку x ( t1 ) ≠ y ( t1 ) ). Следовательно, t ' ∈ M , а значит, M – замкнутое множество.
По определению M ограничено сверху. Пусть t * = sup M . В силу замкнутости M ,
t * ∈ M , x ( t * ) = y ( t * ) . По Лемме 6. ∃ δ > 0 : t − t * < δ и x ( t ) = y ( t ) , т.е. существует t 2 > t * ,
такая, что x ( t2 ) = y ( t2 ) , что невозможно, поскольку t * = sup M . Единственность доказана.
Теорема существования и единственности решения задачи Коши в случае, когда
40 .
правая часть непрерывна и удовлетворяет условию Липшица в полосе.
Теорема 2.
полосе
Если вектор–функция f ( t , x ) непрерывна и удовлетворяет условию Липшица в
Π = { t − t0 ≤ H } × ℜ m , тогда для ∀ ( t0 , x0 ) ∈ Π ∃! x ( t ) – решение задачи (1), (2) на
отрезке t − t0 ≤ H .
Доказательство теоремы 2 лишь незначительно отличается от доказательства теоремы 1. А
именно, при доказательстве леммы 2 в силу непрерывности x1 ( t ) и x0 ( t ) на отрезке t − t0 ≤ H
имеем оценку x1 ( t ) − x0 ( t ) ≤ N .
При n=1:
x2 ( t ) − x1 ( t ) ≤
t
∫
f (τ , x1 (τ ) ) − f (τ , x0 ) dτ ≤ L
t0
t
∫ x (τ ) − x
1
0
dτ ≤ NL t − t0 .
t0
Далее:
x3 ( t ) − x2 ( t ) ≤
t
∫ f (τ , x (τ ) ) − f (τ , x (τ ) ) dτ
2
t0
1
t
≤L
∫
t0
2
L2 t − t0
L2 H 2
.
x2 (τ ) − x1 (τ ) dτ ≤ N
≤N
2!
2!
Методом математической индукции, как и в Лемме 2 докажите, что при t − t0 ≤ H
выполнены оценки:
xn ( t ) − xn −1 ( t ) ≤ LN
t − t0
( NH ) ,
≤L
( n − 1)!
( n − 1)!
n −1
n −1
n −1
n=1,2,….,
из которых вытекает равномерная сходимость функциональной последовательности { xn ( t )} на
отрезке t − t0 ≤ H . Завершите доказательство самостоятельно.
Аналогично Теореме 3 из §4 по изложенной выше схеме можно получить следующий
результат, который потребуется нам при рассмотрении нелинейных краевых задач
Теорема 3.
Пусть функции
Липшица в полосе
fi ( t, y, μ1 , μ2 ,..., μn )
{t0 ≤ t ≤ t0 + a,
yi ∈ R}
при
непрерывны и удовлетворяют условию
μi − μi0 ≤ Ci .
Тогда решение задачи (1)
существует, единственно и непрерывно зависит от параметров μ1 , μ2 , ... , μn при t0 ≤ t ≤ t0 + a ,
μi − μi0 ≤ Ci .
§6.
Уравнения n –го порядка, разрешенные относительно старшей
производной.
Задача Коши в этом случае выглядит так
y ( n ) = fi ( x, y, y′, y′′,..., y ( n −1) )
y ( x0 ) = y10
y′( x0 ) = y20
...........
.
(1)
y ( n −1) ( x0 ) = yn0−1
Путем замены y = y1 , y ′ = y2 ,..., y ( n −1) = yn данная задача сводится к задаче Коши
для нормальной системы ОДУ
⎧ y1′ = y2
⎪ y′ = y
3
⎪⎪ 2
yi ( x0 ) = yi0 , i = 1, 2,..., n .
⎨ ......
⎪ y′ = y
n
⎪ n−1
⎪⎩ yn′ = f ( x, y1 , y2 ,..., yn )
fi = yi +1 ,
i = 1, 2,..., n − 1
Очевидно, что функции в правых частях уравнений
непрерывны и удовлетворяют условию Липшица, то для применения к системе теоремы
существования и единственности достаточно потребовать, чтобы функция f ( x, y1 , y2 ,..., yn ) в
последнем
уравнении
D = 0 ≤ x ≤ a, yi − yi0 ≤ bi ,
{
}
переменным yi , т.е.
Теорема 1.
также
была
i = 1, 2,..., n
и
непрерывна
удовлетворяла
в
параллелепипеде
условию Липшица по
n
f ( x, y1 , y2 ,..., yn ) − f ( x, y1 , y2 ,..., yn ) ≤ N ⋅ ∑ | yi − yi | .
Пусть функция
f ( x, y1 , y2 ,..., yn )
{
i =1
непрерывна и удовлетворяет условию
}
Липшица в параллелепипеде D = 0 ≤ x ≤ a, yi − yi0 ≤ bi ,
i = 1, 2,..., n .
[ x0 , x0 + H ] , где
Тогда задача (1) имеет единственное решение на отрезке
b ⎞
⎛
H = min ⎜ a, min i ⎟ , M = max f ( x, y1 , y2 ,..., yn ) .
1≤ i ≤ n M
D
⎝
⎠
§7.
Замечания, примеры, упражнения.
Замечание 1. Можно доказать разрешимость задачи Коши лишь при выполнении (У1), т.е.
f ( t , x ) ∈ C (G ) (теорема Пеано). Однако, в этом случае решение не обязательно единственно.
Замечание 2. В формулировке теоремы условие (У2) можно заменить более сильным условием
дифференцируемости правой части f ( t , x ) по x и ограниченности частных производных
∂f i ( x, y )
в любой замкнутой ограниченной подобласти g ⊂ G . В частности, эти условия будут
∂x j
∂f i ( x, y )
выполнены, если
∈ C ( G ) . При доказательстве теоремы единственности мы
∂x j
пользовались лишь тем, что правая часть f ( t , x ) удовлетворяет условию Липшица по x в
любом замкнутом, ограниченном цилиндре, а не в любой замкнутой ограниченной подобласти
g ⊂ G . Самостоятельно докажите, что из ограниченности частных производных следует
выполнение условий Липшица в любом замкнутом, ограниченном цилиндре Q ⊂ G .
Подсказка: используйте выпуклость цилиндра и примените формулу конечных приращений
Лагранжа.
Замечание 3. Метод последовательных приближений Пикара обеспечивает существование
решения x = ϕ ( t ) задачи Коши (1), (2) на некотором отрезке [t0 − H , t0 + H ] , т.е. теорема 1 носит
локальный характер.
Замечание 4. Возможность продолжения решения.
Рассмотрим решение (1) x = ϕ1 ( t ) (простроенное методом Пикара), с начальными
значениями t1 = t0 + H , ϕ1 ( t1 ) = ϕ ( t0 + H ) = x1 . Это решение существует на некотором отрезке
[t1 − H1 , t1 + H1 ] .
Возьмем функцию x = ψ ( t ) , определенную на отрезке [t0 − H , t1 + H1 ] :
⎧⎪ ϕ ( t ) , t ∈ [t0 − H , t0 + H ] ,
ψ (t ) = ⎨
⎪⎩ϕ1 ( t ) , t ∈ [t0 − H , t1 + H1 ] .
Очевидно, что x = ψ ( t ) будет решением задачи Коши (1), (2) , т.е. мы получили продолжение
решения x = ϕ ( t ) с отрезка [t0 − H , t0 + H ] на больший отрезок [t0 − H , t1 + H1 ] .
Далее, построив решение (1)
ϕ2 ( t2 ) = ϕ1 ( t1 + H1 ) = x2 ,
[t0 − H , t2 + H 2 ] и т.д.
получим
x = ϕ2 ( t )
продолжение
с начальными условиями
решения
на
еще
t2 = t1 + H1 :
больший
отрезок
Аналогично можно строить продолжение в сторону убывания t.
В результате такого процесса будет построено решение задачи Коши (1), (2),
определенное на некотором максимальном интервале ( a, b ) и такое, что любое его
продолжение совпадает с ним самим. Такое решение называется непродолжаемым.
В дальнейшем нам понадобится следующее свойство непродолжаемых решений:
Пусть g – произвольная замкнутая ограниченная подобласть области G : g ⊂ G ,
Теорема 4.
x = ϕ ( t ) – непродолжаемое решение задачи Коши (1), (2), определенное при t ∈ (T1 , T2 ) . Тогда
∃ t1 , t2 (T1 < t1 < t2 < T2 ) , такие, что при t < t1 и t > t2 точка P ( t , ϕ ( t ) ) ∉ g .
Доказательство.
1)
Докажем существование числа t2 .
Пусть T2 = +∞ . Т.к. g – ограниченное множество, то координаты точек P ( t , ϕ ( t ) ) ∈ g
ограничены, т.е. ∃ T > 0 : t < T . Положим t2 = T и получим, что при t > t2 точка P ( t , ϕ ( t ) ) ⊄ g .
2)
T2 – конечное число. Поскольку g – замкнутая ограниченная подобласть области G, то
⎧d
⎪ , d < +∞
ρ ( g , ∂G ) = d > 0 . Пусть g1 : ρ ( g1 , g ) ≤ ⎨ 2
. Очевидно, что g ⊂ g1 ⊂ G .
⎪⎩ 1, d = +∞
d2
и ( t0 , x0 ) ∈ g , то цилиндр
4
⎛ r ⎞
Выбрав
получим
цилиндр
Q1 = {[t0 − h, t0 + h ] × x − x0 ≤ r} ⊂ g1 .
H = min ⎜ h, ⎟ ,
⎝ M⎠
Q = {[t0 − H , t0 + H ] × x − x0 ≤ r} ⊂ g1 . Из доказательства теоремы существования следует, что
Правая часть f ( t , x ) ∈ C ( g1 ) ⇒ f ( t , x ) ≤ M . Если h 2 + r 2 ≤
существует решение системы уравнений (1) с начальным значением ( t0 , x0 ) , определенное при
t − t0 < H .
Покажем, что число t2 = T2 − H удовлетворяет условиям теоремы. Действительно, если
бы при некотором t0 > T2 − H = t2 точка P0 ( t0 , ϕ ( t0 ) ) ∈ g , то решение ϕ ( t ) с начальными
(t ,ϕ ( t ) )
условиями
0
0
было бы определено по крайне мере на интервале t ∈ ( t0 − H , t0 + H ) ,
который ⊂ (T1 , T2 ) , поскольку x = ϕ ( t ) – непродолжаемое решение. В частности, t0 + H ≤ T2 , или
t0 ≤ T2 − H , что противоречит неравенству t0 > T2 − H .
Замечание 5.
Метод последовательных приближений Пикара является хорошим
приближенным методом решения задачи Коши. После n итераций получается приближенное
решение xn ( t ) , тем более точное, чем больше n.
Пример. Методом последовательных приближений найдем решение задачи Коши для
однородной
системы
линейных
дифференциальных
уравнений
с
постоянными
коэффициентами:
dx
= Ax ,
dt
x ( t0 ) = x0 .
Последовательные приближения в этом случае будут иметь вид:
x0 ( t ) = x0
t
t
t0
t0
x1 ( t ) = x0 + ∫ Ax0 (τ ) dτ = x0 + ∫ Ax0 dτ = x0 + ( t − t0 ) Ax0
t
x2 ( t ) = x0 + ∫ Ax1 (τ ) dτ = x0 + ( t − t0 ) Ax0
t0
( t − t0 )
+
2
2
A2 x0
…………………………………………………………………..
k
n
⎛ n ( t − t0 ) k k ⎞
t − t0 ) k
(
xn ( t ) = ∑
A x0 = ⎜ ∑
A ⎟ x0 , A0 = E .
⎜
⎟
k!
k =0
⎝ k =0 k !
⎠
Поскольку для систем линейных уравнений последовательные приближения сходятся
равномерно на любом отрезке t ∈ [ a, b] , где правая часть системы непрерывна по t, в данном
случае правая часть от t не зависит, то построенная выше функциональная последовательность
сходится к решению задачи Коши при всех значениях t.
⎛ n ( t − t0 ) k k ⎞
xn ( t ) = Bn ( t ) x0 .
Обозначим
тогда
Полагая
A ⎟ = Bn ( t ) ,
⎜∑
⎜ k =0 k !
⎟
⎝
⎠
x0 = ei ≡ {δ i1 , δ i2 … , δ im } , i = 1, 2, … m ,
получим, что существует
lim ( Bn ( t ) )i , i, j = 1, 2… m .
j
n →∞
Предел такой матричной последовательности называют матричной экспонентой и
обозначают
e
A( t −t0 )
∞
=∑
k =0
( t − t0 )
k
Ak .
k!
Теперь решение задачи Коши можно записать в виде x ( t ) = e ( 0 ) x0 . Ряд для матричной
экспоненты быстро сходится, что дает хороший приближенный метод решения задачи Коши
для однородной линейной системы ОДУ с постоянной матрицей. Приближенно матричную
экспоненту можно вычислить по формуле
A t −t
e
A( t −t0 )
n
≈∑
k =0
( t − t0 )
k!
k
Ak .
⎛ eλ1t 0 ⎞
⎛λ 0 ⎞
J1t
=
e
Упражнение 1. Покажите, что если J1 = ⎜ 1
,
то
⎜
⎟
λ2t ⎟
⎝ 0 λ2 ⎠
⎝ 0 e ⎠
⎛ eλt teλt ⎞
⎛λ 1 ⎞
J 2t
Упражнение 2. Покажите, что если J 2 = ⎜
⎟ , то e = ⎜
λt ⎟
⎝0 λ⎠
⎝ 0 e ⎠
⎛ α −β ⎞
J 3t
α t ⎛ cos β t
Упражнение 3. Покажите, что если J 3 = ⎜
⎟ , то e = e ⎜
⎝β α ⎠
⎝ sin β t
− sin β t ⎞
⎟
cos β t ⎠
Замечание 6. Переход от нормальной системы (1) к интегральному уравнению (3) позволяет
ввести понятие обобщенного решения для системы (1). Предположим, что функции f i ( t , x )
непрерывны по t и по x , за исключением, возможно, конечного числа значений t, ограничены, а
также на любой замкнутой ограниченной выпуклой подобласти g ⊂ G удовлетворяют условию
Липшица по x .
Определение. Обобщенным решением задачи Коши (1), (2) называется непрерывное решение
интегрального уравнения (3).
Аналогично доказательству Теоремы 1 можно показать, что при сделанных предположениях
такое решение существует и единственно.
Замечание 7. Для нормальной системы линейных дифференциальных уравнений
•
x = A(t ) x + F (t )
где матрица A ( t ) и вектор– функция F ( t ) непрерывны на некотором отрезке t ∈ [ a, b]
последовательные приближения
t
(
)
xn ( t ) = x0 + ∫ A (τ ) xn −1 (τ ) + F (τ ) dτ , n=1,2,…. ,
t0
x0 ( t ) = x0
равномерно сходятся на всем отрезке [ a, b] .
Действительно, из непрерывности матрицы A ( t ) и вектор– функции F ( t ) следует, что
A ( t ) ≡ sup Ax ≤ L , x1 ( t ) − x0 ( t ) ≤ N при всех t ∈ [ a, b] . Аналогично
∃ L, N > 0 , такие, что
x ≤1
доказательстве Леммы 2. получите самостоятельно при t ∈ [ a, b] оценки
xn ( t ) − xn −1 ( t ) ≤ NL
t − t0
(L b − a )
≤N
( n − 1)!
( n − 1)!
n −1
n −1
n −1
,
n=1,2,…. ,
из которых следует равномерная сходимость функциональной последовательности { xn ( t )} на
всем отрезке [ a, b] . Поэтому, в случае линейной системы уравнений можно рассматривать
решения, определенные сразу на отрезке [ a, b] .
Замечание 9. В приложениях часто встречаются линейные однородные дифференциальные
уравнения вида
••
•
a0 ( t ) x + a1 ( t ) x + a2 ( t ) x = 0 ,
с аналитическими коэффициентами, у которых a0 ( t0 ) = 0 . Такая точка t0 называется особой
точкой уравнения, поскольку в ее окрестности уравнение нельзя разрешить относительно
старшей производной. В этом случае, решения представимого в виде степенного ряда может не
существовать, но могут существовать решения, представимые в виде обобщенных степенных
рядов
∞
x(t ) = ∑ ck ( t − t0 )
r +k
,
k =0
где r некоторое (не обязательно целое) число.
••
1⎞
⎛
Упражнение 2 (сложное). Найдите решение уравнения t 2 x + ⎜ t 2 + ⎟ x = 0 в виде обобщенного
4⎠
⎝
∞
степенного ряда x(t ) = ∑ ck ( t − t0 )
k =0
Ответ: x(t ) = c0
( −1) t 2 m .
t ∑ 2m
2
m=0 2
( m !)
∞
r +k
( c0 ≠ 0 ) .
m
Убедитесь, что этот ряд сходится при t ≥ 0 .
Глава 3. Линейные дифференциальные уравнения n-го порядка
Лекция 6
§1.
Общие свойства.
В этой главе рассматриваются ОДУ вида
Ly ≡ y ( n ) + a1 ( x) y ( n−1) + ... + an ( x) y = f ( x)
(1)
при условии, что все функции ai ( x), i = 1, 2,..., n , а также f ( x) непрерывны на множестве
X , где X - некоторое подмножество числовой прямой, например, отрезок, интервал,
полупрямая или вся числовая прямая.
Функция y ( x) ∈ C n ( X ) называется решение уравнения (1), если при ее
Определение .
подстановке (1) обращается в тождество.
К уравнению (1) могут быть добавлены начальные условия
y ( x0 ) = y10 , y′( x0 ) = y20 , ... , y ( n−1) ( x0 ) = yn0 ,
x0 ∈ X .
(2)
(1)-(2) называется задачей Коши.
10.
Теорема существования и единственности решения задачи Коши.
Теорема 1.
Решение задачи Коши (1)-(2) существует и единственно на любом сегменте
[a, b] ∈ X .
Доказательство основано на теореме о существовании и единственности решения для
системы ОДУ в случае, когда правая часть непрерывна и удовлетворяет условию Липшица в
полосе (см. Теорему 2 из §5 Гл. 2).
Действительно, замена y = y1 , y′ = y2 , ... , y ( n−1) = yn приводит к системе
dyn
dy1
dy2
= y2 ,
= y3 , ... ,
= f ( x) − a1 ( x) yn − ... − an ( x) y1 ,
dx
dx
dx
fi ( x, y1 , y2 ,..., yn ),
i = 1, 2,..., n , как легко видеть, непрерывны в
правые части которой
полосе
{ x ∈ [a, b],
yi ∈ R} и удовлетворяют условию Липшица
n
fi ( x, y1 , y2 ,..., yn ) − fi ( x, y1 , y2 ,..., yn ) ≤ N ⋅ ∑ yk − yk ,
с постоянной
Пример.
Обозначим
(
)
i = 1, 2,..., n
k =1
N = max ⎡1, max max ai ( x) ⎤ .
[ a ,b ]
i
⎣⎢
⎦⎥
Рассмотрим задачу Коши для уравнения второго порядка
y = y1 ,
y ′ = y2 ,
m( x) y′′ + η ( x) y′ + k ( x) y = f ( x) ,
y ( x0 ) = y0 ,
y′( x0 ) = v0 .
тогда эквивалентная задача Коши для нормальной системы
относительно вектор-функции ψ 1 ( x) = { y1 ( x) , y2 ( x)} имеет вид
⎧ y1′ = y2
⎧⎪ y1 ( x0 ) = y0
⎪
.
⎨
k
η
1
⎨
⎪⎩ y2 ( x0 ) = v0
⎪⎩ y2′ = − m y1 − m y2 − m f
Решение рассматриваемой задачи существует и единственно.
20.
Некоторые следствия линейности уравнения.
Заметим, что оператор Ly ≡ y ( n ) + a1 ( x) y ( n−1) + ... + an ( x) y
в уравнении (1) является
линейным и действует из C n ( X ) в C ( X ) . Сформулируем ряд утверждений, являющихся
следствием линейности указанного оператора.
Теорема 2 (принцип суперпозиции).
Пусть в уравнении (1)
M
f ( x) = ∑ Ci f i ( x) , где Ci - некоторые постоянные, а
i =1
решения уравнений Lyi = f i ( x),
yi ( x) -
i = 1, 2,..., M .
M
Тогда функция y ( x) = ∑ Ci yi ( x) является решением уравнения (1).
i =1
M
Доказательство производится путем прямой подстановки функции y ( x) = ∑ Ci yi ( x) в (1):
i =1
M
Ly ≡ L ∑ Ci yi ( x ) = C1 Ly1 + C2 Ly2 + ... + CM LyM = C1 f1 ( x ) + C2 f 2 ( x) + ... + CM f M ( x ) = f ( x) .
i =1
Тривиальным следствием доказанной теоремы являются следующие три утверждения.
Любая линейная комбинация решений однородного уравнения
Ly ≡ y ( n ) + a1 ( x) y ( n−1) + ... + an ( x) y = 0
также есть решение этого однородного уравнения.
Теорема 3.
(3)
Теорема 4. Разность любых двух решений неоднородного уравнения (1) является решением
соответствующего однородного уравнения (3).
Пусть функция z ( x ) = u ( x ) + iv ( x ) удовлетворяет уравнению
Lz = f1 ( x) + if 2 ( x ) .
(*)
Тогда функции u ( x) и v ( x ) - решения уравнений
Lu = f1 ( x) и Lv = f 2 ( x) .
(**)
Верно и обратное утверждение, т.е. если u ( x) и v ( x ) есть решения уравнений (**), то
z ( x ) = u ( x ) + iv ( x ) является решением (*).
Теорема 5.
§2.
Линейное однородное уравнение.
Рассмотрим однородное уравнение
Ly ≡ y ( n ) + a1 ( x) y ( n−1) + ... + an ( x) y = 0
(3)
и выясним структуру его решений. Легко видеть, что множество решений (3) образует
линейное пространство. В связи с этим возникают вопросы:
1. какова размерность этого пространства;
2. как построить базис.
Сформулируем еще два определения.
Определение 1.
Функции y1 ( x),… , ym ( x ) называются линейно зависимыми на отрезке
[a, b ] , если в существует набор постоянных C1 ,… , Cm , среди которых хотя бы одна отлична от
нуля, что выполнено равенство
C1 y1 ( x) + C2 y2 ( x) + ... + Cm ym ( x) = 0
∀x ∈ [ a, b] .
(4)
Если (4) выполняется лишь в случае C1 = C2 = … = Cm = 0 , то функции y1 ( x ),… , ym ( x )
линейно независимы на отрезке [a, b ] .
Пусть y1 ( x),… , yn ( x) - совокупность n − 1 раз дифференцируемых на отрезке [a, b ]
функций (не обязательно решений уравнения (3)).
Определение 2.
Определителем Вронского системы
n
функций
y1 ( x),… , yn ( x)
называется определитель
y1 ( x ) … …
yn ( x )
y1′ ( x ) … …
yn′ ( x )
(5)
W ( x) ≡ W [ y1 , y2 ,..., yn ] =
…
… …
…
y1( n −1) ( x ) … … yn( n −1) ( x )
Теорема 6. Пусть функции y1 ( x),… , yn ( x) линейно зависимы на отрезке [a, b ] .
Тогда определитель Вронского этой системы функций W ( x) ≡ W [ y1 , y2 ,..., yn ] ≡ 0,
x ∈ [ a, b] .
Доказательство. По предположению существует ненулевой набор констант, для которого
C1 y1 ( x) + C2 y2 ( x) + ... + Cn yn ( x) = 0,
x ∈ [ a, b] . Дифференцируя
имеет место тождество
n − 1 раз, получим
C1 y1 ( x) + C2 y2 ( x) + ... + Cn yn ( x) = 0
⎧
⎪
C1 y1′( x) + C2 y2′ ( x) + ... + Cn yn′ ( x) = 0
⎪
⎨
....
....
....
....
....
⎪
−
−
−
(
n
1)
(
n
1)
(
n
⎪⎩C1 y1 ( x) + C2 y2 ( x) + ... + Cn yn 1) ( x) = 0
x ∈ [ a, b ]
Если рассматривать записанные тождества как систему уравнений относительно
неизвестных C1 ,… , Cn , она имеет нетривиальное решение (в силу предположения о линейной
зависимости). Следовательно, W ( x ) ≡ 0, x ∈ [a, b] , что и требовалось доказать.
Теорема 7. Пусть теперь функции y1 ( x),… , yn ( x) - линейно независимые на отрезке [a, b ]
решения однородного уравнения (3).
Тогда определитель Вронского этой системы функций W ( x) ≡ W [ y1 , y2 ,..., yn ] ≠ 0, ∀x ∈ [a, b] .
x0 ∈ [ a, b ] такая, что
Рассмотрим следующую алгебраическую систему относительно неизвестных
Доказательство.
W ( x0 ) = 0 .
Предположим обратное, т.е. пусть существует точка
C1 ,… , Cn :
C1 y1 ( x0 ) + C2 y2 ( x0 ) + ... + Cn yn ( x0 ) = 0
⎧
⎪
C1 y1′( x0 ) + C2 y2′ ( x0 ) + ... + Cn yn′ ( x0 ) = 0
⎪
(6)
⎨
....
....
....
....
....
⎪
⎪⎩C1 y1( n −1) ( x0 ) + C2 y2( n −1) ( x0 ) + ... + Cn yn( n −1) ( x0 ) = 0
Так как ее определитель W ( x0 ) = 0 , то существует нетривиальное решение C10 ,…, Cn0 .
Рассмотрим функцию
y( x) = C10 y1 ( x) + C20 y2 ( x) + ... + Cn0 yn ( x) = 0 ,
(7)
которая является решением однородного уравнения (3). Дифференцируя (7) и учитывая
соотношения (6), получим
y( x0 ) = 0, y′( x0 ) = 0, ... , y ( n−1) ( x0 ) = 0 .
(8)
Далее, в силу теоремы единственности решения (Теорема 1) существует единственное решение
y( x) ≡ 0 , удовлетворяющее условиям (8), что означает (см. (7)) линейную зависимость функций
y1 ( x),… , yn ( x) , что противоречит условию теоремы. Теорема доказана.
Из доказанных теорем 6 и 7 вытекает
Следствие. Определитель Вронского некоторой системы решений однородного уравнения
Ly ≡ y ( n ) + a1 ( x) y ( n −1) + ... + an ( x) y = 0
либо тождественно равен нулю на отрезке [ a, b] , и тогда эти решения линейно зависимы, либо
не обращается в ноль ни в одной точке отрезка [ a, b] ; в этом случае рассматриваемые решения
линейно независимы.
Определение 3.
Совокупность любых n (число n - порядок уравнения) линейно
независимых на отрезке [ a, b] решений уравнения (3),
называется фундаментальной
системой решений (ФСР) однородного линейного дифференциального уравнения.
Следствие. Определитель Вронского, составленный из функций, входящих в ФСР, отличен от
нуля.
Теорема 8 (о существовании ФСР).
Всякое линейное однородное дифференциальное
уравнение с непрерывными коэффициентами имеет ФСР.
Доказательство. Зададим произвольный числовой, отличный от нуля, определитель:
a11 ...a1k ...a1n
Δ=
a21...a2 k ...a2 n
....................
an1 ...ank ...ann
≠0
Построим n решений y1 ( x),… , yn ( x) следующих задач Коши:
Ly = 0
⎧
⎪ y (x ) = a ,
1k
⎪⎪ k 0
k = 1, 2,..., n
⎨ y′k ( x0 ) = a2 k ,
⎪ .......................
⎪ ( n −1)
⎪⎩ yk ( x0 ) = ank .
Составим определитель Вронского для этих решений. Очевидно, что W ( x0 ) = Δ ≠ 0 .
Следовательно, решения y1 ( x),… , yn ( x) линейно независимы, т.е. образуют ФСР, что и
требовалось доказать.
Замечание. Так как существует множество способов задать определитель Δ, фигурирующий в
доказательстве теоремы 8, то ФСР однородного линейного дифференциального уравнения
определена неединственным образом.
Теорема 9.
Пусть y1 ( x),… , yn ( x) - ФСР линейного однородного уравнения
Ly ≡ y ( n ) + a1 ( x) y ( n −1) + ... + an ( x) y = 0 .
Тогда любое решение
z ( x)
этого уравнения представимо в виде
n
z ( x) = ∑ Ci yi ( x ) , где
i =1
C1 ,… , Cn - некоторые постоянные.
Доказательство. Пусть z ( x) - решение задачи Коши
Lz = 0
⎧
⎪ z( x ) = z 0 ,
0
1
⎪⎪
0
′
=
z
(
x
)
z
⎨
0
2,
⎪.......................
⎪
⎪⎩ z ( n −1) ( x0 ) = zn0 .
(9)
n
Покажем, что можно выбрать постоянные C1 ,… , Cn так, что z ( x) = ∑ Ci yi ( x ) .
i =1
Подставив это выражение в начальные условия в (9), получим систему
⎧
C1 y1 ( x0 ) + C2 y2 ( x0 ) + ... + Cn yn ( x0 ) = z10
⎪
C1 y1′( x0 ) + C2 y2′ ( x0 ) + ... + Cn yn′ ( x0 ) = z20
⎪
⎨
....
....
....
....
....
⎪
−
−
−
n
n
n
(
1)
(
1)
(
1)
⎪⎩C1 y1 ( x0 ) + C2 y2 ( x0 ) + ... + Cn yn ( x0 ) = zn0 ,
определитель которой W ( x0 ) ≠ 0 , т.е. система имеет решение C10 ,… , Cn0 . Составим функцию
n
z 0 ( x) = ∑ Ci0 yi ( x) и заметим, что она также является решением задачи Коши (9). Но по теореме
i =1
1 решение задачи Коши (9) единственно, следовательно,
n
z ( x) ≡ z 0 ( x) = ∑ Ci0 yi ( x),
x ∈ [ a, b] ,
i =1
что и требовалось.
Замечание. Выражение
n
z ( x) = ∑ Ci yi ( x ) , где набор функций
i =1
y1 ( x),… , yn ( x)
есть ФСР,
дает общее решение однородного линейного уравнения. Доказанная теорема утверждает, что
ФСР образует базис в пространстве решений однородного линейного уравнения.
§3.
Неоднородное линейное уравнение.
10.
Общее решение неоднородного уравнения.
Рассмотрим уравнение
Ly ≡ y ( n ) + a1 ( x) y ( n−1) + ... + an ( x) y = f ( x)
Пусть y ( x) - некоторое частное решение (1).
(1)
Теорема 10.
Любое решение y ( x)
неоднородного линейного дифференциального
уравнения (1) представимо в виде суммы его частного решения y ( x) и общего решения z ( x )
соответствующего однородного уравнения, т.е.
n
y ( x) = y ( x) + z ( x) ≡ y ( x) + ∑ Ci yi ( x) ,
i =1
0
1
0
n
где y1 ( x),… , yn ( x) есть ФСР, а C ,… , C - произвольные постоянные.
Доказательство. Пусть y ( x) - любое решение уравнения (1). Легко видеть (в силу
линейности), что функция z ( x ) = y ( x) − y ( x ) удовлетворяет однородному уравнению. Тогда
n
y ( x) − y ( x) = ∑ Ci yi ( x) , что и доказывает утверждение теоремы.
i =1
20.
Функция Коши.
Если нам известна ФСР однородного уравнения, то можно построить частное решение
соответствующего неоднородного уравнения, удовлетворяющее нулевым начальным условиям.
Рассмотрим следующую задачу Коши:
Ly = 0
a <ξ < x<b
⎪⎧
.
⎨
( n −1) )
(ξ ) = 1
⎪⎩ y (ξ ) = 0, y′(ξ ) = 0, ,...., y
Известно, что ее решение существует и непрерывно вместе с производными зависит от
параметра ξ . Обозначим K ( x, ξ ) - решение этой специальной задачи.
Примеры.
1)
2)
⎧ y′ − y = 0
,
==> y ≡ K ( x, ξ ) = e x −ξ ;
⎨
=
y
1
ξ
⎩ ( )
y ′′ + y = 0
⎧
,
==> y ≡ K ( x, ξ ) = sin( x − ξ ) .
⎨
⎩ y (ξ ) = 0, y′(ξ ) = 1
Определение.
K ( x, ξ ) , являющаяся решением специальной задачи Коши
Функция
a <ξ < x <b
⎧ Lx K ( x, ξ ) = 0
⎨
( n −1)
⎩ K (ξ , ξ ) = 0, K x′ (ξ , ξ ) = 0, , .... , K x (ξ , ξ ) = 1
называется функцией Коши уравнения (1).
x
Теорема 11.
y ( x) = ∫ K ( x, ξ ) f (ξ ) dξ ,
Функция
где K ( x, ξ ) - функция Коши
x0
уравнения (1), является решением задачи Коши для неоднородного уравнения (1) с нулевыми
начальными условиями, т.е.
x ∈ [ a, b ]
⎧ Ly = f ( x),
.
⎨
( n −1)
x0 ∈ [a, b]
⎩ y ( x0 ) = y′( x0 ) = ... = y ( x0 ) = 0,
x
y ( x) = ∫ K ( x, ξ ) f (ξ ) dξ
Доказательство. Мы должны убедиться в том, что функция
x0
удовлетворяет уравнению и указанным нулевым начальным условиям. Непосредственно
проверяется:
начальные условия
t
y = ∫ K ( x, ξ ) f (ξ ) dξ
an ( x) ×
⇒
y ( x0 ) = 0
⇒
y′( x0 ) = 0
⇒
y′′( x0 ) = 0
⇒
y ( n −1) ( x0 ) = 0
t0
x
y′ = K ( x, x) f ( x) + ∫ K x′ ( x, ξ ) f (ξ )dξ
an −1 ( x) ×
=0
x0
x
y′′ = K x′ ( x, x) f ( x) + ∫ K x′′( x, ξ ) f (ξ )dξ
an − 2 ( x) ×
=0
x0
...........................................................
a1 ( x) ×
y
( n −1)
=K
( n − 2)
x
x
( x, x) f ( x) + ∫ K x( n −1) ( x, ξ ) f (ξ )dξ
=0
x0
x
1×
y ( n ) = K x( n −1) ( x, x) f ( x) + ∫ K x( n ) ( x, ξ ) f (ξ )d ξ
=1
x0
Умножая an − k ( x) на y ( k ) ( x) и складывая полученные равенства, имеем
x
Ly = f ( x) + ∫ Lx K ( x, ξ ) f (ξ )d ξ = f ( x) ,
x0
=0
x
т.е. функция
y ( x) = ∫ K ( x, ξ ) f (ξ ) dξ
удовлетворяет уравнению (1) и нулевым начальным
x0
условиям. Теорема доказана.
Примеры.
1)
2)
⎧ y′ − ay = f ( x)
⎨
⎩ y (0) = 0
⎧ y′′ + y = f ( x)
⎨
⎩ y (0) = 0, y′(0) = 0
x
y ( x) = ∫ e a( x −ξ ) f (ξ ) d ξ
⇒
0
x
y = ∫ sin( x − ξ ) f (ξ ) d ξ .
⇒
0
30.
Метод вариации постоянных.
Теорема 12 .
Пусть y1 ( x) , ... , yn ( x) – ФСР однородного уравнения
Ly ≡ y ( n ) + a1 ( x) y ( n −1) + ... + an ( x) y = 0 .
n
Тогда функция y ( x) = ∑ ci ( x) yi ( x) будет решением неоднородного уравнения (1), если
i =1
c i ( x) удовлетворяют системе линейных уравнений
⎧ n ′
( j)
⎪∑ ci ( x) yi ( x) = 0,
⎪ i =1
⎨ n
⎪ c ′ ( x) y ( n −1) ( x) = f ( x)
i
i
⎪⎩∑
i =1
j = 0,1, 2,..., n − 2
(10)
Доказательство. Система (10) однозначно разрешима относительно ci′ ( x ) , так как
определитель этой системы есть определитель Вронского W ( x) ≠ 0 . Заметим, что вектор –
функции
ψ 1 ( x) = y1 ( x) , ... , y1( n −1) ( x) , ... , ψ n ( t ) = yn ( x) , ... , yn( n −1) ( x)
{
}
{
}
образуют ФСР решений для системы уравнений
ψ ′ = A( x)ψ .
Нетрудно показать (сделайте это самостоятельно), что если ci′ ( x ) удовлетворяют уравнениям
(10), то функция
n
z ( x ) = ∑ ci ( x )ψ i ( x )
i =1
является решением неоднородной системы
z ′ = A( x) z + F ( x) ,
где
1
0
⎛ 0
⎜
0
1
⎜ 0
A( x) = ⎜ …
…
…
⎜
0
0
⎜ 0
⎜ −a ( x) −a ( x) −a ( x)
n −1
n−2
⎝ n
…
…
…
…
…
⎞
⎟
0 ⎟
… ⎟,
⎟
0 ⎟
− a1 ( x) ⎟⎠
0
F ( x) = {0, … , 0, f ( x)} .
n
n
i =1
i =1
Но тогда первая координата вектора z ( x) , т.е. функция y ( x) = ∑ ci ( x)ψ i1 ( x) = ∑ ci ( x) yi ( x)
есть решение (1).
Замечание 1 (физический смысл функции Коши).
Ly ( x) = δ ( x − ξ 0 )
⎫
⎬
( n −1)
y ( x0 ) = 0, y′( x0 ) = 0,… , y ( x0 ) = 0 ⎭
– функция влияния мгновенного
сосредоточенного в т. ξ0 , на точку x.
по определению
x
⇒
y ( x) =
∫
K ( x, ξ )δ (ξ − ξ 0 )dξ
δ − функции
=
x0
единичного
источника
K ( x, ξ 0 ) .
("импульсная"
функция),
Замечание 2.
Для уравнения с постоянными коэффициентами функция Коши может
быть найдена по формуле (докажите самостоятельно)
y1 (ξ )
y2 (ξ ) ... yn (ξ )
1
K (x, ξ ) =
W (x )
y1′ (ξ )
y2′ (ξ )
...
yn ′ ( ξ )
...
...
...
...
y1(n −2) (ξ ) y2(n −2) (ξ ) ... yn(n −2) (ξ )
y1(x )
§ 4.
.
y2 (x )
...
yn (x )
Линейные уравнения с постоянными коэффициентами.
Рассмотрим теперь частный случай линейного дифференциального уравнения линейное однородное уравнение с постоянными коэффициентами
(1п)
Ly = y ( n ) + a1 y ( n −1) + ... + an y = f ( x ),
ai = const
10.
Общее решение однородного уравнения.
Нетривиальные частные решения однородного уравнения
Ly = y ( n ) + a1 y ( n −1) + ... + an y = 0,
ai = const
(2п)
λx
будем строить в виде y ( x ) = Ce , где C ≠ 0 и λ - постоянные (метод Эйлера). Подставляя в
(2п) получим:
L ⎡⎣Ce λ x ⎤⎦ = C ⎡⎢⎣ λ n + a1λ n −1 + ... + an ⎤⎥⎦ e λ x ≡ CM (λ )eλ x = 0 ⇒ M (λ ) = 0
Определение.
Многочлен M (λ ) = λ n + a1λ n −1 + ... + an , называется характеристическим
многочленом уравнения (1п), а уравнение
(3п)
M (λ ) = λ n + a1λ n −1 + ... + an = 0
называется характеристическим уравнением для (1п).
Очевидно, что характеристическое уравнение имеет ровно n корней (с учетом
кратности). Рассмотрим несколько возможных вариантов.
1.
Характеристическое уравнение (3п) имеет n различных (простых) корней λ1 , λ2 ,... λn :
M (λk ) = 0 . Каждому корню λk соответствует функция yk ( x) = eλk x , k = 1, 2,..., n , которая
является решением однородного уравнения (2п), так как в силу (3л) имеет место
M (λk ) = 0
L ⎡⎣ e λk x ⎤⎦ = M (λk )e λk x = 0 .
⇒
Теорема 13.
Пусть корни характеристического многочлена (3п) простые.
Тогда функции yk ( x) = eλk x , k = 1, 2,..., n образуют ФСР уравнения (2п).
Доказательство. Для доказательства достаточно показать линейную независимость
указанной системы функций. Предположим обратное, т.е. пусть существует набор констант
n
C1 , C2 , ... , Cn ,
∑C
i =1
2
i
≠ 0 , что выполнено соотношение
C1e λ1 x + C2 e λ2 x + ... + Cn e λn x = 0 .
(4п)
λn x
Положим, для определенности, C1 ≠ 0 . Разделим (4п) на e ≠ 0 и продифференцируем.
Получим
(5п)
C1 (λ1 − λn )e ( λ1 − λn ) x + C2 (λ2 − λn )e ( λ2 − λn ) x + ... + Cn −1 (λn −1 − λn )e ( λn−1 − λn ) x = 0 .
Разделим (5п) на e( λn−1 −λn ) x ≠ 0 и снова продифференцируем:
C1 (λ1 − λn )(λ1 − λn −1 )e ( λ1 − λn−1 ) x + C2 (λ2 − λn )(λ2 − λn −1 )e ( λ2 − λn−1 ) x + ... + Cn − 2 (λn − 2 − λn −1 )e ( λn−2 − λn−1 ) x = 0 .
Выполнив указанную процедуру n − 1 раз, будем иметь
C1 (λ1 − λn ) ⋅ (λ1 − λn −1 ) ⋅ ... ⋅ (λ1 − λ2 )e ( λ1 − λ2 ) x = 0 .
Отсюда следует, что C1 = 0 , так как e( λ1 −λ2 ) x ≠ 0 и все λi различны по предположению.
Полученное противоречие доказывает теорему.
Таким образом, в случае простых корней характеристического уравнения общее
решение однородного линейного дифференциального уравнения с постоянными
коэффициентами имеет вид
n
y ( x ) = ∑ Ck e λk x .
k =1
Замечание. В случае комплексных корней пару комплекснозначных функций e(α +iβ ) x , e(α −iβ ) x ,
отвечающих паре комплексно сопряженных корней
λk = α + i β , λk +1 = α − i β , обычно
заменяют вещественными функциями eα x cos β x, eα x sin β x
действительные функции.
2.
и получают ФСР, содержащую
Пусть характеристическое уравнение M (λ ) = 0 (3п) имеет кратные корни, т.е.
M (λ ) = ( λ − λ1 ) 1 ( λ − λ2 ) 2 ...( λ − λs ) s ...( λ − λm ) m = 0 ,
k
k
k
k
где ks - кратность корня λs , причем k1 + k2 + ... + ks + ... + km = n . В этом случае ФСР выглядит
иначе. Далее рассмотрим случай, когда имеется один кратный корень.
Теорема 14 .
Пусть
λi ,
i = 1, 2,..., k = n − p - простые корни характеристического
уравнения, а λk +1 - корень кратности p.
Тогда корню λk +1 отвечает p линейно независимых частных решений уравнения (2п)
eλk +1x , xeλk +1x , x 2 eλk +1x , ... , x p −1eλk +1x ,
т.е. n функций
eλ1x , eλk +1x , ... , eλk x , xeλk +1x , x2 eλk +1x , ... , x p −1eλk +1x
образуют ФСР однородного уравнения (2п).
Доказательство. Покажем, что все указанные функции удовлетворяют однородному
уравнению (2п). Это проверяется непосредственной подстановкой функций системы
eλk +1x , xeλk +1x , x 2 eλk +1x , ... , x p −1eλk +1x в уравнение (2п).
Рассмотрим тождество L ⎡⎣ e λ x ⎤⎦ = M (λ )e λ x и продифференцируем его по λ . Применяя
формулу Лейбница, получим
L ⎡⎣ xeλ x ⎤⎦ = M ′(λ )eλ x + M (λ ) xeλ x , ….
L ⎡⎣ x p e λ x ⎤⎦ = { x p M (λ ) + px p −1M ′(λ ) + ... + M ( p ) (λ )} e λ x .
Если λs – корень кратности ks , то M (λs ) = 0, M ′(λs ) = 0, ... , M ( ks −1) (λs ) = 0, M ( ks ) (λs ) ≠ 0 .
Следовательно, L ⎡⎣ x p eλ x ⎤⎦ = 0 при всех p = 0,1,..., ks − 1 , т.е. функции вида
x p e λ x , где
p = 0,1,..., ks − 1 , являются решениями однородного уравнения (2п).
Вторую часть теоремы, т.е. линейную независимость указанных функций, можно
доказать аналогично тому, как это было сделано в теореме 13.
Замечание. В случае комплексных корней пару комплекснозначных функций x p e (α + iβ ) x ,
x p e (α −iβ ) x заменяют вещественными функциями x p eα x cos β x , x p eα x sin β x и получают другую
ФСР.
20.
Неоднородное уравнение.
Напомним, что (см. §3) общее решение y ( x) неоднородного линейного
дифференциального уравнения представимо в виде суммы его частного решения y ( x) и
общего решения z ( x ) соответствующего однородного уравнения, т.е.
n
y ( x ) = y ( x ) + z ( x ) ≡ y ( x) + ∑ Ci yi ( x) ,
i =1
0
1
0
n
y1 ( x),… , yn ( x) есть ФСР, а C ,… , C - произвольные постоянные.
Общие методы поиска частных решений линейных уравнений были рассмотрены в §3.
Для уравнений с постоянными коэффициентами в случае специального вида правых частей
частные решения могут быть эффективно получены еще несколькими способами.
где
1)
Метод неопределенных коэффициентов.
Рассмотрим уравнение с постоянными коэффициентами.
Ly = y ( n ) + a1 y ( n −1) + ... + an y = f ( x ),
(6п)
где f ( x) = Pl ( x ) eλ x , P ( x ) - многочлен степени l, λ - константа.
Утверждение 1.
Пусть λ1 , λ2 ,… , λs ,… , λm - корни характеристического уравнения M (λ ) = 0
кратностей k1 , k2 , …, k s ,…, km , где k1 + k2 + ... + ks + ... + km = n .
Тогда:
1).
Если λ ≠ λs ( s = 1,..., m) (нерезонансный случай) то частное решение уравнения (6п) ищем
в виде
y ( x) = Ql ( x ) eλ x ,
где Ql ( x ) - многочлен степени l, с неопределенными коэффициентами.
2).
Если λ = λs (кратности ks ) (резонансный случай), то частное решение уравнения (7)
ищем в виде
y ( x ) = x ks Rl ( x )e λ x ,
где Rl ( x ) - многочлен степени l с неопределенными коэффициентами.
Подставляя искомый вид решений в (6п) и приравнивая коэффициенты при одинаковых
степенях x , находим неопределенные коэффициенты многочленов Ql ( x) и Rl ( x) (метод
неопределенных коэффициентов).
Замечание 1.
уравнение Эйлера
К уравнению с постоянными коэффициентами сводится однородное
x n y ( n ) + a1 x n −1 y ( n −1) + ... + an y = 0,
если положить x = et .
Замечание 2.
Методом неопределенных коэффициентов решается неоднородное
уравнение Эйлера со специальной правой частью f ( x) = S (ln x) x λ (переходящей при замене
x = et в функцию f (t ) = S (t )eλt ).
Примеры.
1) y′′ + 4 y = e3 x , M (λ ) = λ 2 + 4 = 0, λ1,2 = ±2i ≠ λ = 3, y = Ae3 x
2) y′′ + 4 y = ( x + 2)e3 x M (λ ) = λ 2 + 4 = 0, λ1, 2 = ±2i ≠ λ = 3 , y = ( Ax + B)e3 x
3) y′′ − 4 y = ( x + 2)e 2 x M (λ ) = λ 2 − 4 = 0, λ1, 2 = ±2, m1 = 1, λ = λ1 , y = x( Ax + B)e 2 x
4) y′′′ + 3 y′′ + 3 y′ + y = ( x + 2)e − x M (λ ) = (λ + 1)3 = 0, λ1 = −1, m1 = 3, λ = λ1 = −1 y = x 3 ( Ax + B)e− x
5) y′′ − 4 y = cos 2 x = Ree ±2ix M (λ ) = λ 2 − 2 = 0, λ1, 2 = ±2, λ = ±2i, λ ≠ λk y = A cos 2 x + B sin 2 x
6) y′′ + 4 y = cos 2 x = Ree±2ix M (λ ) = λ 2 + 2 = 0 , y = x ( A cos 2 x + B sin 2 x )
2)
Операторный метод Хевисайда.
dk
d
k
, тогда D = k
Рассмотрим оператор дифференцирования D =
dx
dx
Используя оператор D, можно записать ЛДУ (7) в виде
Ly = y ( n ) + a1 y ( n −1) + ... + an y = D n y + a1 D n −1 y + ... + an −1 Dy + an y = Pn ( D ) y = f ( x)
1
Pn ( D ) y = f ( x ) , и его частное решение можно найти как y =
f ( x) .
Pn ( D )
Свойства операторного многочлена Pn ( D ) .
1
1
(v ( x ) ) .
1. Pn ( D ) kv ( x ) = kPn ( D ) v ( x ) ⇔
(kv ( x ) ) = k
Pn ( D )
Pn ( D )
2. Pn ( D ) e kx = Pn ( k ) e kx ⇔
1
e kx
.
e kx ) =
(
Pn ( D )
Pn ( k )
⎛ ⎧ sin ax ⎫ ⎞ ⎧ sin ax ⎫
⎧ sin ax ⎫
1 ⎛ ⎧ sin ax ⎫ ⎞
1
2
3. Pn ( D 2 ) ⎜ ⎨
=
⎬⎟ = ⎨
⎬ Pn ( − a ) ⇔
⎨
⎬
⎨
⎬
⎜
⎟
Pn ( D 2 ) ⎝ ⎩cos ax ⎭ ⎠ Pn ( − a 2 ) ⎩cos ax ⎭
⎝ ⎩cos ax ⎭ ⎠ ⎩cos ax ⎭
1
1
(v ( x ) ) .
4. Pn ( D ) (e kx v ( x ) ) = e kx Pn ( D + k ) (v ( x ) ) ⇔
e kx v ( x ) ) = e kx
(
Pn ( D )
Pn ( D + k )
1
5. n , n ∈ N - это операция n-кратного интегрирования.
D
(M > m )
6. (am D m + am +1D m +1 + ...aM D M ) Pm −1 ( x ) ≡ 0
1
(Fk (x ) ) = {1 ≡ Pn (D )Qk (D ) + R>k (D )} = Qk (D ) Fk (x )
Pn ( D )
1
1
1
v1 ( x ) + k2
v2 ( x )
8.
(k1v1 (x ) + k2v2 (x ) ) = k1
Pn ( D )
Pn ( D )
Pn ( D )
1
1
(v ( x ) ) =
(v ( x ) )
9.
F1 ( D ) F2 ( D )
F2 ( D ) F1 ( D )
7.
Примеры.
1) y′ = e 4 x , Dy = e 4 x ,
y ( x) = ∫ e 4 x dx =
1 4x
e
4
2) y′′ − 2 y′ − 3 y = e 4 x , ( D 2 − 2 D − 3) y = e 4 x ,
y ( x) =
1
e4 x
e4 x
4x
e
=
=
(
)
D2 − 2D − 3
42 − 2 ⋅ 4 − 3 5
1
sin 5 x
1
( sin 5 x ) = 2 = − sin 5 x
−5 + 9
16
D +9
1
1
y(x ) = 4
7x = 2 2
7x
D + D2
D ( D + 1)
3) y ′′ + 9 y = sin 5 x , ( D 2 + 9 ) y = sin 5 x ,
4) y IV + y ′′ = 7x
Вычислим
(D
4
y ( x) =
+ D 2 ) y = 7x ,
2
1
7x . Воспользуемся правилом деления многочлена «столбиком»
D +1
1
1 + D2
−
1 + D2 1 − D2 .
2
− D2
=0
1
D ⎞
D 2x
⎛
x
1
x
x
=
−
=
−
= x − 0 = x , откуда
⎜
D2 + 1
D 2 + 1 ⎟⎠
D2 + 1
⎝
1
1
7x 3
.
y(x ) = 2 2
7x = 7 2 x = 7 ∫ ∫ xdx dx =
D ( D + 1)
D
6
2
Таким образом,
(
)
Глава 4. Системы линейных уравнений
Лекция 7
§ 1.
Общие свойства.
Определение 1.
Нормальной системой (НС) линейных дифференциальных уравнений
называется система вида
•
x = A(t ) x + F (t ) ,
(1)
где A ( t ) — квадратная матрица ( n × n ) , а F ( t ) = { f1 (t ),… , f n (t )} — заданная вектор–функция,
определенные при t ∈ [ a, b] , x ( t ) = { x1 (t ),… , xn (t )} .
Везде далее предполагается, что элементы aij (t ) матрицы A ( t ) , а также функции f i (t )
непрерывны на отрезке [ a, b] .
Однородной системой (ОС) линейных ДУ, соответствующей системе (1),
Определение 2.
называется система уравнений
•
x = A(t ) x
(2)
Докажем несколько теорем, устанавливающих наиболее важные свойства решений
систем линейных уравнений.
Теорема 1.
Линейная комбинация решений ОС (2) также является решением этой системы.
Доказательство.
•
x=
•
•
Пусть x1 = A ( t ) x1 и x2 = A ( t ) x2 . Положим x = α x1 + β x2 , тогда
•
•
d
(α x1 + β x2 ) = α x1 + β x2 = α A ( t ) x1 + β A ( t ) x2 = A ( t )(α x1 + β x2 ) = A ( t ) x
dt
Теорема 2.
Разность любых двух решений НС (1) есть решение ОС (2).
Доказательство.
•
•
Пусть x1 = A ( t ) x1 + F ( t ) и x2 = A ( t ) x2 + F ( t ) . Тогда, вычитая, получим
d
( x1 − x2 ) = A ( t ) x1 − A ( t ) x2 = A ( t )( x1 − x2 )
dt
Следствие. Сумма любого (частного) решения НС (1) и решения соответствующей ОС (2)
есть решение НС (1).
•
•
x1 − x2 =
Сформулируем правило сложения решений НС линейных уравнений, которое
применяется при практическом нахождении решений НС.
Теорема 3.
•
•
Если x1 = A ( t ) x1 + F1 ( t ) и x2 = A ( t ) x2 + F2 ( t ) , то x = α x1 + β x2 — решение
•
системы уравнений x = A ( t ) x + α F1 ( t ) + β F2 ( t ) .
Доказательство
Теорема 4.
проведите самостоятельно.
Пусть x ( t ) ( t ∈ [ a, b ]) — решение системы уравнений (1), матрица A ( t ) и вектор
– функция F ( t ) непрерывны на некотором отрезке t ∈ [ a, b] . Пусть
F (t ) ≤ F .
Тогда для ∀t , t0 ∈ [ a, b] выполнена оценка
A ( t ) ≡ sup Ax ≤ A и
x =1
A t −t
x ( t ) ≤ ⎡⎣ x ( t0 ) + F ( b − a ) ⎤⎦ e 0
Решение x ( t ) удовлетворяет интегральному уравнению
Доказательство.
t
t
t0
t0
(3)
( t , t ∈ [ a, b ] ) .
x ( t ) = x ( t0 ) + ∫ A (τ ) x (τ ) dτ + ∫ F (τ ) dτ
0
Оценим сверху x ( t ) :
x ( t ) ≤ x ( t0 ) +
t
t
t0
t0
∫ A (τ ) x (τ ) dτ + ∫ F (τ ) dτ
.
По условию A ( t ) ≤ A , следовательно, A (τ ) x (τ ) ≤ A x (τ ) . Поэтому
t
t
t
t0
t0
t0
x ( t ) ≤ x ( t0 ) + A ∫ x (τ ) dτ + F ∫ dτ = x ( t0 ) + A ∫ x (τ ) dτ + F t − t0 .
t
x ( t ) ≤ ⎡⎣ x ( t0 ) + F ( b − a ) ⎤⎦ + A ∫ x (τ ) dτ .
t0
По лемме Гронуолла, получаем, что
A t −t
x ( t ) ≤ ⎡⎣ x ( t0 ) + F ( b − a ) ⎤⎦ e 0 .
Следствие 1.
x ( t ) ≤ x ( t0 ) e
Следствие 2.
(
)
Для любого решения линейной ОС (2) F ( t ) = 0 выполняется оценка
A t − t0
.
(4)
Пусть матрица A ( t ) ∈ C [ a, b ] , тогда A ( t ) ≤ A и для решения x ( t ) ОС (2)
имеет место оценка
x ( t0 ) e
− A t − t0
≤ x ( t ) ≤ x ( t0 ) e
A t − t0
(5)
–– рост и убывание функции x ( t ) ограничены экспонентой.
Действительно, оценка сверху есть оценка (4). С другой стороны, та же оценка (4) имеет
место для любых t , t0 ∈ [ a, b] . Поэтому, заменяя t0 на t, а t на t0, получим x ( t0 ) ≤ x ( t ) e A t −t0 ,
т.е. x ( t ) ≥ x ( t0 ) e − A t −t0 .
Из известной теоремы существования и единственности для нормальных систем
вытекает следующее утверждение.
Теорема 5 (существования и единственности для линейной системы).
Решение задачи Коши для системы (1) с начальным условием
x ( t0 ) = x0
существует и единственно на любом отрезке [t0 , T ] ⊂ [a, b] .
Доказательство.
Сформулированный результат следует из того, что функции
Gi ( x1 , x2 ,..., xn , t ) = f i (t ) + ai1 (t ) x1 + ai 2 (t ) x2 + ... + ain (t ) xn
непрерывны, имеют ограниченные непрерывные частные производные по переменным xi и,
следовательно, удовлетворяют условию Липшица в полосе t ⊂ [a, b] , −∞ < xi < ∞ . Поэтому
применима теорема существования и единственности решения нормальной системы (см.
Теорема 2 из §5 Гл. 2, а также замечание 3 §2 Гл. 2), где постоянная Липшица
N ≥ max ⎡ max ai , j (t ) ⎤ .
⎥⎦
i, j ⎢
⎣ [ a ,b ]
Замечание.
Поскольку x ( t ) = 0 очевидно есть решение (2), то решение x ( t ) однородной
линейной системы с непрерывной матрицей A ( t ) тождественно равно нулю на всем отрезке
[a, b] , если оно равно нулю в какой-либо точке этого отрезка. Это следует как из оценки (5), так
и из теоремы 5.
§2.
Однородная система.
10.
Линейная зависимость системы вектор-функций. Определитель Вронского.
Определение 3.
Решения x1 ( t ) ,…, xm ( t ) ОС (2) называются линейно независимыми на
отрезке [ a, b] , если в каждой точке t ∈ [ a, b] векторы x1 ( t ) ,…, xm ( t ) линейно независимы.
Очевидно, что если m решений x1 ( t ) ,…, xm ( t ) линейно независимы, то m ≤ n . Пусть
теперь задана совокупность n решений
x1 ( t ) , …, xn ( t )
(7)
ОС (2), определенных на [ a, b] . Составим матрицу
X ( t ) = ( x1 ( t ) , …, xn ( t ) ) .
Определение 4.
(8)
Определитель
W (t ) = X (t )
(9)
называется определителем Вронского совокупности решений x1 ( t ) ,…, xn ( t ) .
20 .
ФСР однородной системы и ее свойства.
Совокупность из n решений однородной линейной системы (2), линейно
Определение 5.
независимых на отрезке [ a, b] , называется фундаментальной совокупностью решений (ФСР).
Теорема 6.
Определитель
Вронского
W (t ) ,
составленный
из
столбцов
ФСР,
определенной на отрезке [ a, b] , отличен от нуля во всех точках этого отрезка.
Доказательство.
Предположим противное. Тогда W ( t0 ) = 0 в некоторой точке t0 ∈ [ a, b ] .
Рассмотрим систему n линейных однородных уравнений относительно C = {c1 , … , c n } :
X ( t0 ) C = 0
(10)
Так как определитель этой системы W ( t0 ) = 0 , то существует нетривиальное решение C ≠ 0
системы уравнений (10). Это означает, что столбцы матрицы X ( t0 ) – векторы x1 ( t0 ) ,…, xn ( t0 ) –
линейно зависимы, что противоречит определению ФСР.
Теорема 7.
Пусть матрица A ( t ) непрерывна на отрезке [ a, b] , и в какой-либо точке
t0 ∈ [ a, b ] векторы x1 ( t0 ) ,…, xn ( t0 ) линейно независимы.
Тогда система решений (7) линейно независима на отрезке [ a, b] .
Доказательство.
Докажем, что при каждом фиксированием t ∈ [ a, b] равенство X ( t ) C = 0
выполняется лишь при C = 0 . Предположим противное, т.е. пусть при некотором t1 ∈ [ a, b]
существует такой вектор C ≠ 0 , что X ( t1 ) C = 0 . Тогда линейная комбинация x ( t ) = X ( t1 ) C
решений (7) есть решение системы (2), удовлетворяющее условию x ( t1 ) = 0 . Согласно
Следствию 2 из теорем 4, 5 x ( t ) ≡ 0, t ∈ [ a, b ] . В частности, для t = t0
0 = x ( t0 ) = X ( t0 ) C ,
т. е. векторы x1 ( t0 ) ,…, xn ( t0 ) линейно зависимы, что противоречит условию теоремы.
Определитель Вронского W ( t ) совокупности решений (7) отличен от нуля
Следствие 1.
во всех точках отрезка [ a, b] (на котором эти решения определены), если он отличен от нуля
хотя бы в одной точке отрезка [ a, b] .
проделайте самостоятельно.
Доказательство
Можно непосредственно показать, что определитель Вронского может обращаться в
нуль лишь сразу на всем отрезке [ a, b] . Для этого продифференцируем определитель Вронского
W ( t ) , пользуясь правилом дифференцирования определителя:
n
•
W ( t ) = ∑ Wk ,
где Wk
( k = 1, 2,..., n )
k =1
— определитель, отличающийся от W лишь
•
k -ой строкой: вместо
•
строки x1k , … , xnk в нем стоит строка из производных x1k ,…, xnk :
Wk ( t ) =
x11 , …… , x1n
x11 ,……………, x1n
x1k −1 ,… , xnk −1
x1k −1 ,……………, xnk −1
•
•
x1k , …… , xnk
=
n
n
x11 , …… , x1n
∑ a ( t ) x , ……, ∑ a ( t ) x
j =1
k
j
j
1
x1n , …… , xnn
k
j
j =1
j
n
n
= ∑ a (t )
j =1
k
j
x1n , ……………, xnn
x1k −1 ,… , xnk −1
x1j , …… , xnj
x1n , …… , xnn
x11 , …… , x1n
= a (t )
k
k
x1k −1 ,… , xnk −1
x1k , …… , xnk
=
x1n , …… , xnn
= akk ( t ) W ( t ) .
Следовательно,
•
n
n
k =1
k =1
W ( t ) = ∑ Wk = ∑ akk ( t )W ( t ) = S ( t ) W ( t ) ,
(11)
n
где S ( t ) = ∑ akk ( t ) ≡ Tr A ( t ) ≡ Sp A ( t ) – след матрицы A(t ) .
k =1
Решая уравнение (11) как уравнение с разделяющимися переменными, получим формулу
Лиувилля:
t
∫ S (τ )dτ
W ( t ) = W ( t0 ) et0
(12).
Из (12) следует, что если существует точка t0 ∈ [a, b] , в которой W ( t0 ) = 0 , то W ( t ) ≡ 0 на
отрезке [ a, b] .
Следствие 2.
Любое решение x ( t ) однородной системы (2) есть линейная комбинация
столбцов ФСР:
n
x ( t ) = ∑ c k xk ( t ) = X ( t ) C .
Действительно, в точке t0 ∈ [ a, b ]
k =1
n
x ( t0 ) = ∑ c k xk ( t0 ) = X ( t0 ) C
(13)
k =1
Рассмотрим два решения ОС (2): x ( t ) и
n
∑ c x ( t ) . В силу (13) эти два решения удовлетворяют
k
k =1
k
одному и тому же начальному условию при t = t0 . Следовательно, на основании теоремы 5
n
x ( t ) = ∑ c k xk ( t ) = X ( t ) C при любом t ∈ [ a, b] .
k =1
Определение 6.
Общим решением системы линейных уравнений (1) называется множество
всех решений этой системы.
30.
Общее решение однородной системы.
Теорема 8.
Пусть x1 ( t ) ,…, xn ( t ) — ФСР системы (2).
Тогда общее решение однородной системы имеет вид
n
x ( t ) = ∑ c k xk ( t ) = X ( t ) C ,
(14)
k =1
где C - произвольный вектор.
Следствие.
Множество всех решений (2) образует n-мерное векторное (линейное)
пространство, базисом которого может служить любая ФСР.
Доказательство. При любых c1 , …, c n выражение (14) представляет собой решение ОС (2), а
в силу Следствия 2 любое решение ОС (2) может быть записано в виде (14). Поэтому (14) есть
общее решение (2). Сумма двух решений (2) и произведение решения (2) на число есть снова
решения этой системы. Кроме того, любая ФСР линейно независима и любое решение через нее
линейно выражается. Следовательно, множество всех решений (2) образует n–мерное векторное
пространство, базисом которого служит любая ФСР.
Замечание.
Из теоремы существования следует, что для любой ОС всегда существует
ФСР. Для ее построения достаточно задать произвольно n линейно независимых векторов
xk ( t ) , k = 1, 2,..., n , удовлетворяющие условиям
a1 ,…, an
и рассмотреть решения
xk ( t0 ) = ak , k = 1, 2,..., n . В силу теоремы 7 функции xk ( t ) , k = 1, 2,..., n
Следствие. (принцип суперпозиции).
Пусть
x0 ( t )
образуют ФСР.
- частное решение неоднородной
системы (1), а функции x1 ( t ) , …, xn ( t ) образуют ФСР соответствующей однородной системы
(2), тогда общее решение (1) имеет вид:
n
x ( t ) = x0 ( t ) + ∑ c k xk ( t ) = x0 ( t ) + X ( t ) C ,
(15)
k =1
где C - произвольный вектор.
В самом деле, при любых c1 , …, c n формула (15) представляет собой решение (1).
Наоборот, если x ( t ) - какое-либо решение (1), то x ( t ) − x0 ( t ) - решение системы (2), и по
теореме 8 оно может быть записано в виде
n
x ( t ) − x0 ( t ) = ∑ c k xk ( t ) = X ( t ) C , где
C -
k =1
произвольный вектор. Следовательно, любое решение x ( t ) системы уравнений (1) представимо
в виде (15).
Покажем, что решение неоднородной системы линейных дифференциальных уравнений
(1) сводится к нахождению ФСР соответствующей однородной системы (2).
§2.
Неоднородная система.
Метод вариации постоянных. Матрица Коши.
10 .
Теорема 9.
Пусть матрица A ( t ) и вектор F ( t ) непрерывны на отрезке
[ a, b ]
и
известна ФСР однородной системы (2).
Тогда общее решение неоднородной линейной системы (1) находится с помощью квадратур.
Доказательство (метод вариации постоянных или метод неопределенных коэффициентов
Лагранжа).
Пусть x1 ( t ) , …, xn ( t ) – ФСР системы (2). Составим ее фундаментальную матрицу, т.е.
матрицу из столбцов, образующих ФСР X ( t ) = ( x1 ( t ) , …, xn ( t ) ) . Так как каждый столбец этой
матрицы является решением (2), то справедливо матричное уравнение
•
X (t ) = A (t ) X (t )
(16)
Заметим, что определитель фундаментальной матрицы X ( t ) = W ( t ) ≠ 0 t ∈ [ a, b ] , и будем
искать решение системы (2) в виде
n
x ( t ) = ∑ c k ( t ) xk ( t ) = X ( t ) C ( t )
(17)
k =1
Подставляя выражение (17) в (2), получим
•
•
X (t ) C (t ) + X (t ) C (t ) = A (t ) X (t ) C (t ) + F (t )
(18)
В силу (16) уравнение (18) примет вид
•
X (t ) C (t ) = F (t )
(19)
Так как X ( t ) ≠ 0 и матрица X ( t ) ∈ C [ a, b ] , то существует обратная матрица X −1 ( t ) ∈ C [ a, b] .
Тогда
•
C ( t ) = X −1 ( t ) F ( t ) ,
откуда
t
C ( t ) = ∫ X −1 (τ ) F (τ )dτ + C0
(20)
t0
где C0 — произвольный постоянный вектор. Подставляя (20) в формулу (17), получим
t
x ( t ) = X ( t ) C0 + X ( t ) ∫ X −1 (τ ) F (τ )dτ .
(21)
t0
Докажем, что (21) есть общее решение неоднородной системы (1). Так как C0 —
произвольный постоянный вектор, то выбирая C0 = 0 , получим частное решение системы (1)
t
x0 ( t ) = X ( t ) ∫ X −1 (τ ) F (τ )dτ
t0
С другой стороны, X ( t ) C0 общее решение ОС (2) и (21) можно переписать в виде (15)
x ( t ) = x0 ( t ) + X ( t ) C0
(22)
( C0 - произвольный вектор). В силу следствия из теоремы 8 формула (22), а, следовательно, и
(21), дает общее решение НС (1).
Покажем теперь, как с помощью представления (21) решить задачу Коши для системы
(1). Пусть ищется решение x ( t ) , удовлетворяющее начальному условию x ( t0 ) = x0 . Полагая в
формуле (21) t = t0 получим x0 = X ( t0 ) C0 , откуда
C0 = X −1 ( t0 ) x0
Таким образом, решение задачи Коши для системы (1) задается формулой
x (t ) = X (t ) X
−1
t
( t0 ) x0 + X ( t ) ∫ X −1 (τ ) F (τ )dτ ,
t0
или
x (t ) = X (t ) X
−1
t
( t0 ) x0 + ∫ X ( t ) X −1 (τ ) F (τ )dτ .
t0
K ( t ,τ ) = X ( t ) X −1 (τ )
называется
матрицей
Коши,
"импульсной" матрицей или матрицантом. Она однозначно определяется как решение
задачи Коши:
d
K ( t , t0 ) = A(t ) K ( t , t0 ) , K ( t0 , t0 ) = E .
dt
Замечание. Для построения матрицы Коши надо решить n векторных задач Коши:
⎛0⎞
⎜ ⎟
⎜:⎟
•
x k = A(t ) xk ,
xk (t0 ) = ⎜ 1 ⎟ ← k ,
k = 1, 2,..., n .
⎜ ⎟
⎜:⎟
⎜0⎟
⎝ ⎠
Решение задачи Коши для системы (1) имеет вид
Определение 7.
Матрица
t
x ( t ) = K ( t , t0 ) x0 + ∫ K ( t ,τ ) F (τ )dτ .
t0
•
•
На практике бывает удобно решить систему (19) X ( t ) C ( t ) = F ( t ) и найти C ( t ) = B ( t ) .
Тогда C ( t ) = ∫ B ( t )dt + C0 и общее решение для системы (2) имеет вид:
⎛
⎞
x ( t ) = X ( t ) ⎜ ∫ B ( t )dt + C0 ⎟ ,
⎝
⎠
а решение задачи Коши
⎛t
⎞
x ( t ) = X ( t ) ⎜ ∫ B (τ )dτ + X −1 ( t0 ) x0 ⎟ .
⎜t
⎟
⎝0
⎠
Теорема 10.
ФСР однозначно определяет нормальную форму линейной ОС, т. е.
матрицу A(t ) . Иначе говоря, зная фундаментальную матрицу X (t ) системы, можно
однозначно восстановить эту систему уравнений.
Доказательство. Пусть задана фундаментальная матрица X (t ) ОС (2). Тогда из (16)
•
•
X ( t ) = A ( t ) X ( t ) => A ( t ) = X −1 ( t ) X ( t ) .
Замечание. Общее решение НС (1) однозначно определяет эту систему. В самом деле
•
A ( t ) = X −1 ( t ) X ( t ) . Далее, выбирая какое-нибудь частное решение x0 ( t ) системы (2), находим
•
вектор F ( t ) = x0 ( t ) − A ( t ) x0 ( t ) .
Рассмотрим теперь вопрос о степени гладкости решения линейной НС (1). По
определению решение x = x ( t ) является дифференцируемой вектор–функцией переменного t
на всем отрезке [ a, b] . Может ли решение обладать большей гладкостью?
Пусть матрица A ( t ) и вектор F ( t ) k раз дифференцируемы на отрезке [ a, b] .
Теорема 11.
Тогда любое решение x = x ( t ) системы (1) k + 1 раз дифференцируемо.
Доказательство.
Так как x ( t ) — дифференцируемая вектор-функция, то в правой части
системы (1) при k ≥ 1 стоит дифференцируемая вектор-функция. Поэтому
••
•
•
•
∃ x = A (t ) x+ A (t ) x+ F (t ) .
Если k ≥ 2 то в правой части только что полученного равенства снова стоит дифференцируемая
•••
вектор-функция, и потому ∃ x ( t ) . Повторяя это рассуждение k раз, получим утверждение
теоремы.
Замечание.
Если матрица A ( t ) и вектор F ( t ) бесконечно дифференцируемы, т. е.
имеют на [ a, b] производные всех порядков, то из доказанной теоремы следует, что и любое
решение системы (1) бесконечно дифференцируемо.
20.
Метод исключения для системы линейных дифференциальных уравнений.
В § 2 было показано, что одно линейное уравнение n–то порядка сводится к линейной
системе из n уравнений. Имеет место и обратное утверждение, т.е. любой линейной системе
можно сопоставить линейное уравнение n-го порядка. Этот способ решения системы линейных
дифференциальных уравнений называется методом исключения. Мы не будем обосновывать
такую возможность в общем виде, а ограничимся лишь рассмотрением примера.
Пример.
Рассмотрим систему с постоянными коэффициентами
⎧•
⎪ x1 = a11 x1 + a12 x2 + f1 ( t )
⎨•
⎪ x2 = a21 x1 + a22 x2 + f 2 ( t )
⎩
и сведем ее к одному уравнению второго порядка относительно функции
продифференцируем первое уравнение и вместо производных
части исходной системы:
••
•
•
•
x1 и
•
x2
x1 (t ) . Для этого
подставим правые
•
x1 = a11 x1 + a12 x2 + f 1 = a11 ( a11 x1 + a12 x2 + f1 ) + a12 ( a21 x1 + a22 x2 + f 2 ) ≡ b11 x1 + b12 x2 + q1 ( t ) .
Выразим x2 из первого уравнения исходной системы
1 ⎛•
⎞
⎜ x1 − a11 x1 − f1 ⎟
a12 ⎝
⎠
и подставим в правую часть записанного выше соотношения. Получим
••
b ⎛•
⎞
x1 = b11 x1 + 12 ⎜ x1 − a11 x1 − f1 ⎟ + q1 ,
a12 ⎝
⎠
или
x2 =
••
•
a12 x1 − b12 x1 + ( a11b12 − a12b11 ) x1 = g1 ( t ) .
Записав общее решение этого уравнения, найдем x1 (t ) . Подставив его в выражение для
x2 , найдем общее решение системы { x1 (t ), x2 (t )} .
§ 4. Некоторые приемы, упрощающие решение линейных дифференциальных
уравнений и систем.
В этом параграфе мы рассмотрим некоторые частные случаи, когда решение
дифференциальных уравнений либо упрощается, либо сводится к квадратурам.
10.
Рассмотрим линейное однородное уравнение n-го порядка
x (n ) + a1 (t ) x (n −1) + ... + an (t ) x = 0 .
Пусть известно частное решение ϕ(t) этого уравнения, отличное от нуля на рассматриваемом
отрезке [a, b]. Сделав замену переменных x = y ϕ(t), получим следующее уравнение для y:
•
ϕ (t ) y (n ) + b1 (t ) y (n −1) + ... + bn −1 (t ) y + (ϕ (n ) + a1 (t ) ϕ (n −1) + ... + an (t ) ϕ ) y = 0
Последнее слагаемое равно нулю, так как ϕ(t) — решение исходного уравнения. Обозначая
•
y = z , получим линейное однородное уравнение n-1 –го порядка (ϕ (t ) ≠ 0 )
ϕ (t ) z (n −1) + b1 (t ) z (n −2) + ... + bn −1 (t ) z = 0 .
20.
Рассмотрим неоднородную систему линейных уравнений
•
x = A(t ) x + F (t )
с диагональной матрицей
0 ⎞
⎛ a11 ( t ) 0
⎜
⎟
A ( t ) = diag ( a11 ( t ) ,… , ann ( t ) ) = ⎜ 0
0 ⎟
⎜ 0
0 ann ( t ) ⎟⎠
⎝
В этом случае система распадается на n линейных уравнений первого порядка
•
xi = aii ( t ) xi + f i ( t )
( i = 1, n )
и потому интегрируется в квадратурах.
30 .
Рассмотрим неоднородную систему линейных уравнений
•
x = A(t ) x + F (t )
с треугольной матрицей
⎛ a11 ( t )
⎜
⎜ a21 ( t )
A ( t ) = ⎜ a31 ( t )
⎜
⎜…
⎜ a (t )
⎝ n1
0
a22 ( t )
a32 ( t )
…
an 2 ( t )
0
0
a33 ( t )
…
an 3 ( t )
…
…
…
…
…
0
⎞
⎟
0
⎟
⎟.
0
⎟
…
⎟
ann ( t ) ⎟⎠
В этом случае интегрирование системы также сводится к квадратурам. Действительно, первое
уравнение системы
•
x1 = a11 ( t ) x1 + f1 ( t )
— линейное уравнение с одной неизвестной функцией x1, и его решения находятся с помощью
квадратур. Второе уравнение системы, записанное в виде
•
x2 = a22 ( t ) x2 + ( f 2 ( t ) + a21 ( t ) x1 ( t ) )
– также линейное уравнение с одной неизвестной функцией x2. Последовательно решая
получившиеся линейные уравнения, найдем решение исходной системы.
§ 5.
Системы линейных уравнений с постоянными коэффициентами.
В случае системы двух уравнений удобно сводить к одному уравнению 2-го порядка и
строить ФСР и общее решение для него, а затем и для системы (см. пример в §3).
10.
Однородная система линейных уравнений с постоянными коэффициентами.
Рассмотрим однородную систему линейных уравнений с постоянными коэффициентами
•
где A = ( aij ) ,
x = Ax
( i, j = 1, n ) , a
ij
(1)
- числа.
Ее общее решение представимо в виде x = e At C , где C - произвольный вектор. Действительно,
∞
∞
•
d
d ∞ tk
t k −1
t k −1
x = e At C = ∑ Ak C = ∑
Ak C = A∑
Ak −1C = Ae At C = Ax
1
!
1
!
dt
dt k =0 k !
k
−
k
−
)
)
k =1 (
k =1 (
•
x = Ax , x ( t0 ) = x0
Решение задачи Коши
1.
имеет вид
x=e
A( t −t0 )
x0 .
Случай невырожденного спектра собственных значений матрицы A.
Теорема 1. (о построении ФСР и общего решения однородной системы с постоянными
коэффициентами).
Пусть: {λ j , j = 1, n} – невырожденный спектр собственных значений матрицы A, {ℑ j, j = 1, n} –
соответствующие им собственные векторы матрицы A.
λt
Тогда: ℑ je j , j = 1, n - ФСР системы (1). Общее решение (1) есть линейная комбинация ФСР:
{
}
n
x ( t ) = ∑c j ℑ je
(
λ jt
= ℑeΛt C ,
j =1
)
где ℑ = ℑ1 ,… , ℑn – квадратная матрица (n x n), составленная из собственных векторов,
{
}
Λ = diag {λ1 , … , λn } , e Λt = diag e λ1t , … , e λnt , C = ( c1 , … , cn ) – вектор произвольных постоянных.
Доказательство.
Aℑ = ℑΛ
⇒
T
По определению собственного вектора и собственного значения имеем.
•
•
A = ℑΛℑ−1 . Подставив в (1), получим x = Ax = ℑΛℑ−1 x , или ℑ−1 x = Λℑ−1 x .
•
y = Λy , где матрица Λ = diag {λ1 ,… , λn }
является диагональной. Легко видеть, что ее общее решение имеет вид
y ( t ) = e Λt C ,
Сделав замену y = ℑ−1 x , приведем систему к виду
где e Λt = diag {eλ1t ,… , eλnt } , а C = ( c1 , … , cn ) – вектор произвольных постоянных. Следовательно,
T
общее решение (1) имеет вид
n
x ( t ) = ℑy ( t ) = ℑeΛt C = ∑c j ℑ je
λ jt
(2)
j =1
T
⎛
⎞
Подставляя в (2) Ck = ⎜ 0,…1, 0… 0 ⎟ k = 1, n и используя теорему линейной алгебры о
k
⎝
⎠
линейной независимости собственных векторов, соответствующих различным собственным
λt
значениям, получим, что ℑ je j , j = 1, n - ФСР системы (1).
{
}
•
Решение задачи Коши x = Ax , x ( t0 ) = x0 имеет вид
x ( t ) = ℑe
2.
Λ ( t − t0 )
ℑ−1 x0
Случай вырожденного спектра собственных значений матрицы A.
Теорема 2.
Пусть λs , s = 1, 2,..., m – собственные значения матрицы A,
кратности (напомним, что k1 + … + km = n ).
Тогда общее решение задачи (1) может быть записано в виде
ks – их
⎛ tp p ⎞
x ( t ) = ∑∑ ⎜ Bs ⎟ Cs eλst ,
(3)
s =1 p = 0 ⎝ p !
⎠
где Bs = A − λs E , а Cs – общее решение уравнения Bsks Cs = 0 (корневой вектор матрицы A).
m ks −1
Доказательство.
k s −1 p
k s −1 p
m ⎡ k s −1
m ⎡ ks − 2 p
•
⎤
⎤
t p −1
t
t
t
x (t ) = ∑ ⎢∑
Bsp + ∑ Bsp λs ⎥Cs eλs t = ∑ ⎢ B ∑ Bsp + λs ∑ Bsp ⎥Cs eλs t =
s =1 ⎣ p =1 ( p − 1) !
p =0 p !
s =1 ⎣
p =0 p !
p =0 p !
⎦
⎦
⎡
⎤
⎥
ks − 2 p
ks − 2 p
ks −1
k s −1
m ⎢
t
t
t
t
= ∑ ⎢ Bs ∑ Bsp + λs ∑ Bsp +
Bsks −1λs +
Bsks ⎥Cs eλst =
⎢
−
−
p
p
k
k
!
!
1
!
1
!
( s )
( s ) ⎥
p =0
p =0
s =1
⎢
⎥
Bsks Cs = 0
⎣
⎦
ks − 2 p
m ⎡
⎤
t
t ks −1
Bsks −1 ⎥Cs eλs t =
= ∑ ⎢( Bs + λs E ) ∑ Bsp + ( Bs + λs E )
( ks − 1)!
s =1 ⎣
p =0 p !
⎦
k s −1 p
⎤
m ⎡
m
⎡ ks −1 t p
⎤
t
= ∑ ⎢( Bs + λs E ) ∑ Bsp ⎥Cs eλs t = A∑ ⎢ ∑ Bsp ⎥Cs eλst = Ax
⎥⎦
s =1 ⎢
p =0 p !
s =1 ⎣ p = 0 p !
⎦
A
⎣
⎧
⎪ x = x − 2x
⎪
Пример.
Найти общее решение системы уравнений ⎨ x = x + 3 x + x
.
⎪
⎪ x = −2 x − 2 x − x
⎩
⎛ 1 −2 0 ⎞
⎜
⎟,
3
1
Решение.
Матрица системы имеет вид A = 1
⎜
⎟
⎜ −2 −2 −1⎟
⎝
⎠
ее собственные значения: λ1 = 1, k1 = 3 ;.
•
1
1
2
1
2
•
2
3
•
3
1
2
⎛ 0 −2 0 ⎞
⎛ −2 −4 −2 ⎞
B1 = A − λ1 E = A − E = ⎜⎜ 1 2 1 ⎟⎟ , B12 = ⎜⎜ 0 0 0 ⎟⎟ ,
⎜ −2 −2 −2 ⎟
⎜ 2 4 2⎟
⎝
⎠
⎝
⎠
⎛ 0 0 0⎞
⎛0⎞
⎛ c1 ⎞
B13 = ⎜⎜ 0 0 0 ⎟⎟ , B13C1 = ⎜⎜ 0 ⎟⎟ ⇒ C1 = ⎜⎜ c2 ⎟⎟ ;
⎜ 0 0 0⎟
⎜0⎟
⎜ ⎟
⎝
⎠
⎝ ⎠
⎝ c3 ⎠
−2c1
⎛
⎞
⎛ −2c1 − 4c2 − 2c3 ⎞
⎟;
B1C1 = ⎜⎜ c1 + 2c2 + c3 ⎟⎟ , B12C1 = ⎜⎜
0
⎟
⎜ −2c − 2c − 2c ⎟
⎜ 2c + 4c + 2c ⎟
1
2
3⎠
2
3 ⎠
⎝
⎝ 1
3
⎧⎛ c1 ⎞ ⎛
−2c1
⎞ 2 ⎛ −2c1 − 4c2 − 2c3 ⎞ ⎫
⎪⎜ ⎟ ⎜
⎟ t ⎜
⎟⎪ t
x ( t ) = ⎨⎜ c2 ⎟ + t ⎜ c1 + 2c2 + c3 ⎟ + ⎜
0
⎟⎬ e
⎪⎜ c ⎟ ⎜ −2c − 2c − 2c ⎟ 2 ⎜ 2c + 4c + 2c ⎟ ⎪
1
2
3⎠
2
3 ⎠⎭
⎝ 1
⎩⎝ 3 ⎠ ⎝
20.
Неоднородная система линейных уравнений с постоянными коэффициентами.
•
x = Ax + F (t )
где
A = {aij } - постоянная матрица. Напомним, что общее решение неоднородной линейной
системы имеет вид x = x0 + xч , где x0 - общее решение соответствующей однородной системы,
а xч - любое частное решение неоднородной.
Способы нахождения частного решения неоднородной системы.
1.
Метод вариации постоянных или с помощью матрицы Коши.
2.
Для правых частей специального вида ("квазиполинома") подбор решений методом
неопределенных коэффициентов.
3.
Операторный метод.
Теорема.
Решение задачи Коши
⎧⎪ •
x = Ax + F (t )
⎨
⎪⎩ x (t0 ) = x0
для неоднородной линейной системы с постоянными коэффициентами имеет вид:
t
x (t ) = e A(t −t0 ) x0 + ∫ e A(t −τ ) F (τ )dτ .
t0
Доказательство нетрудно провести, например, используя метод вариации постоянных
(сделайте это самостоятельно).
Глава 4.
Краевые задачи
Лекция 8
Краевыми задачами для ОДУ называются задачи, в которых дополнительные условия
ставятся в нескольких точках.
Далее мы рассмотрим двухточечные краевые задачи для линейных ОДУ 2-го порядка и
некоторые задачи для нелинейных ОДУ 2-го порядка. Подробно будет изучена краевая задача с
граничными условиями 1-го рода (Дирихле) и отмечены некоторые особенности задач с
граничными условиями 2-го рода (Неймана) и 3-го рода.
§1. Краевая задача для линейного дифференциального уравнения второго
порядка.
10. Постановка задачи.
Рассмотрим линейное ОДУ 2-го порядка
d 2u
du
+ a1 ( x ) + a2 ( x ) u = f1 ( x ) , 0 < x < l
2
dx
dx
с дополнительными условиями первого рода (задача Дирихле),
u (0) = u 0 , u (l ) = u l
(1)
(2)
предполагая, что a1 ( x ) , a2 ( x ) , f1 ( x ) ∈ C [ 0, l ]
Определение. Классическим решением задачи Дирихле (1), (2) будем называть функцию
u ( x ) ∈ C 2 ( 0, l ) ∩ C [ 0, l ] , удовлетворяющую уравнению (1) и краевым (граничным) условиям (2).
Замечание. В случае граничных условий 2-го и 3-го рода u ( x ) ∈ C 2 ( 0, l ) ∩ C1 [ 0, l ] .
Преобразуем уравнение (1) к более удобному для дальнейшего исследования виду.
a ( x ) dx
> 0, p′( x) = a1 ( x ) p ( x) . Получим
Умножим уравнение (1) на p ( x) = e ∫ 1
p ( x)
d 2u
du
+ a1 ( x ) p ( x ) + p ( x ) a2 ( x ) u = p ( x ) f1 ( x )
2
dx
dx
p′( x )
−q( x)
f2 ( x )
или
d ⎡
du ⎤
p ( x ) ⎥ − q ( x ) u = f2 ( x )
⎢
dx ⎣
dx ⎦
Далее везде, где не оговорено другое, будем использовать обозначение
d ⎡
du ⎤
L[u ] =
p ( x) ⎥ − q ( x)u .
⎢
dx ⎣
dx ⎦
Замена переменных u ( x ) = y ( x ) + v ( x ) , где v ( x ) ∈ C 2 [ 0, l ] и удовлетворяет краевым
L[u ] ≡
⎡
ul − u0 ⎤
x ⎥ приводит задачу (1), (2) к задаче с
условиям (2), например, u ( x ) = y ( x ) + ⎢u 0 +
l
⎣
⎦
нулевыми граничными условиями
⎧⎪ L[ y ] = f 2 ( x ) − L[v] ≡ f ( x ) , 0 < x < l
⎨
.
⎪⎩ y ( 0 ) = 0, y ( l ) = 0
f ( x ) ∈ C [ 0, l ]
Поэтому, не ограничивая общности, рассмотрим краевую задачу
L[ y ] = f ( x ) , 0 < x < l
(3)
B0 [ y ] ( 0 ) = 0, Bl [ y ] ( l ) = 0
где операторы краевых условий могут иметь вид:
B [ y] ≡ y ,
dy
или
dx
dy
B [ y] ≡
+ hy , где h - постоянная.
dx
B [ y] ≡
20.
Формулы Грина. Тождество Лагранжа.
Пусть u ( x ) , v ( x ) ∈ C 2 [ 0, l ] . Умножим L[u ] на v и проинтегрируем от 0 до l по частям.
Получим
l
l
l
⎡
⎤
du
du dv
(4)
∫0 v (ξ ) L[u ] (ξ ) dξ = p (ξ ) v (ξ ) dξ 0 − ∫0 ⎢⎣ p (ξ ) dξ dξ + q (ξ ) u (ξ ) v (ξ )⎥⎦ dξ
– первая формула Грина.
Меняя в (4) местами функции v и u и вычитая почленно полученное соотношение
из (4), получим
⎧
⎛
du
dv
∫0 ( vL[u ] − uL[v]) dξ = ⎨⎩ p (ξ ) ⎜⎝ v (ξ ) dξ − u (ξ ) dξ
– вторая формула Грина.
l
l
⎞⎫
⎟⎬
⎠⎭ 0
Следствие. Нетрудно доказать (проведите необходимые выкладки самостоятельно), что на
подпространстве дважды непрерывно дифференцируемых функций, удовлетворяющих
однородным краевым условиям, оператор
d ⎡
du ⎤
L[u ] =
p ( x) ⎥ − q ( x)u
⎢
dx ⎣
dx ⎦
является самосопряженным, т.е. (u , L[v]) = (v, L[u ]) , где скалярное произведение
l
(u , v) = ∫ u ( x)v( x) dx .
0
Для этого нужно произвести интегрирование по частям в равенстве (u , L[v]) = (v, L[u ]) и учесть
граничные условия, причем в случае граничных условий 3–го рода при x = 0 имеем
du
du
( 0 ) + hu ( 0 ) = 0 ⇒ ( 0 ) = −hu ( 0 )
dx
dx
dv
dv
( 0 ) + hv ( 0 ) = 0 ⇒ ( 0 ) = −hv ( 0 )
dx
dx
⎛
⎞
du
dv
p ( 0) ⎜ v ( 0)
( 0 ) − u ( 0 ) ( 0 ) ⎟ = p ( 0 ) ( −v ( 0 ) hu ( 0 ) + u ( 0 ) hv ( 0 ) ) = 0
dξ
dξ
⎝
⎠
Аналогично, обращается в 0 подстановка в точке x = l .
Заменим во второй формуле Грина верхний предел интегрирования на x ∈ [ 0, l ]
⎧
⎛
du
dv
∫0 ( vL[u ] − uL[v]) dξ = ⎩⎨ p (ξ ) ⎜⎝ v (ξ ) dξ − u (ξ ) dξ
x
x
⎞⎫
⎟⎬ ,
⎠⎭ 0
и продифференцируем обе части написанного равенства по переменной x :
d ⎧
du
dv ⎞ ⎫
⎛
vL[u ] − uL[v] = ⎨ p ( x ) ⎜ v ( x ) − u ( x ) ⎟ ⎬ .
dx ⎩
dx
dx ⎠ ⎭
⎝
Подставив вместо u ( x) и v ( x ) функции y1 ( x) и y2 ( x) – ФСР однородного уравнения, получим
⎧
⎫
⎪
dy1
dy2 ⎞ ⎪⎪
d ⎪
⎛
y2 L[ y1 ] − y1 L[ y2 ] = 0 ⇒
−
p
x
y
x
y
x
(
)
(
)
(
)
⎨
1
⎜ 2
⎟ ⎬ = 0 – тождество Лагранжа.
dx
dx
dx
⎝
⎠⎪
⎪
=0
=0
W ( x)≠0
⎪⎩
⎪⎭
Далее, интегрируя последнее равенство, будем иметь
p ( x )W ( x ) = C ⇒
p ( x ) W ( x ) = C ≠ 0 – формула Лиувилля – Остроградского.
30.
Теорема единственности решения неоднородной краевой задачи.
Рассмотрим однородную краевую задачу (однородное уравнение и нулевые краевые
условия):
L[ y ] = 0, 0 < x < l
(5)
N 0 [ y ] ( 0 ) = 0, N l [ y ] ( l ) = 0
Если у такой задачи есть ненулевое решение, то его можно трактовать как собственную
функцию задачи Штурма–Лиувилля, отвечающую нулевому собственному значению:
L[ y ] = 0 ⋅ y, 0 < x < l
λ
B0 [ y ] ( 0 ) = 0, Bl [ y ] ( l ) = 0
Теорема 1. Если однородная краевая задача имеет только тривиальное решение, то
соответствующая ей неоднородная задача имеет не более одного решения.
Доказательство. Пусть y1 ( x) и y2 ( x) – решения задачи
L[ y ] = f ( x ) , 0 < x < l
B0 [ y ] ( 0 ) = 0, Bl [ y ] ( l ) = 0
,
тогда w( x) = y1 ( x) − y2 ( x) – решение однородной краевой задачи
L[ w] = 0, 0 < x < l
,
B0 [ w] ( 0 ) = 0, Bl [ w] ( l ) = 0
которая по условию имеет только нулевое решение, т.е. w( x ) ≡ 0 , или y1 ( x) ≡ y2 ( x) .
40.
Теорема о достаточных условиях единственности решения неоднородной краевой
задачи.
Сформулируем некоторые достаточные условия того, что однородная краевая задача
имеет только тривиальные решения.
Теорема 2. Пусть в операторе L[u ] q ( x) ≥ 0 . Тогда однородная краевая задача имеет:
в случае граничных условий 1– го рода только тривиальное решение;
1)
в случае граничных условий 2– го рода только тривиальное решение, если q ( x) > 0 ,
2)
или нетривиальное решение u ( x ) = const , если q ( x) ≡ 0 ;
Доказательство. Пусть y = u ( x) – решение однородной задачи. Применим первую формулу
Грина:
l
2
l
l ⎡
⎤
⎛ du ⎞
du
2
u
L
u
d
p
u
p
q
u
ξ
[
]
ξ
ξ
0
ξ
ξ
ξ
ξ
ξ
=
=
−
+
⎢
⎥ dξ .
(
)
(
)
(
)
(
)
(
)
(
)
(
)
⎜
⎟
∫0
∫
d
d
ξ
ξ
⎝
⎠
⎢
⎥⎦
0 ⎣
0
=0
Далее
l
2
l ⎡
⎤
⎛ du ⎞
du
2
0 = p (ξ ) u (ξ )
− ∫ ⎢ p (ξ ) ⎜
⎟ + q (ξ ) u (ξ ) ⎥ dξ
dξ 0 0 ⎢⎣
⎝ dξ ⎠
⎥⎦
2
⎡
⎤
⎛ du ⎞
2
∫0 ⎢⎢ p (ξ ) ⎜⎝ dξ ⎟⎠ + q (ξ ) u (ξ )⎥⎥ dξ = 0 .
⎣
⎦
l
⇒
=0
Так как p ( x ) > 0 , q ( x) ≥ 0 , то оба слагаемых под интегралом неотрицательны, а
du
равенство возможно лишь в когда
≡ 0 . Поэтому u ( x ) = const независимо от граничных
dx
условий.
1) Если заданы граничные условия 1–го рода u (0) = u (l ) = 0 , тогда
u ( x ) = const = u (0) = u (l ) = 0 .
2) В случае граничных условий 2–го рода:
q ( x) > 0
⎧0, если
du
≡ 0 ⇒ u ( x) = const = ⎨
.
q ( x) ≡ 0
dx
⎩C , если
50.
Функции Грина и ее свойства.
Определение. Функцией Грина краевой задачи (1),(2) называется функция 2-х переменных
G ( x, s ) такая, что
1)
G ( x, s ) определена и непрерывна в квадрате {0 ≤ x ≤ l} × {0 ≤ s ≤ l} ;
2)
3)
4)
G ( x, s ) удовлетворяет однородному уравнению Lx [G ] = 0 при 0 < x, s < l ;
G ( x, s ) удовлетворяет нулевым граничным условиям;
В точке x = s первая производная имеет разрыв I рода:
dG ( x, s )
dx
x= s +0
=
x = s −0
dG
dG
1
.
( s + 0, s ) − ( s − 0, s ) =
dx
dx
p ( s)
Замечание. Из определения функции G(x,s) следует, что
dG
dG
1
;
1)
( x + 0, x ) − ( x − 0, x ) =
dx
dx
p ( x)
2.а)
2.б)
dG
( x, x − 0 ) =
dx
dG
( x, x + 0 ) =
dx
dG
( x + 0, x ) ;
dx
dG
( x − 0, x )
dx
Теорема 3. Пусть однородная краевая задача (5) имеет только тривиальное решение.
Тогда существует единственное решение неоднородной краевой задачи (3), которое может быть
выражено через функцию Грина:
l
y ( x) = ∫ G ( x, s ) f ( s ) ds .
0
Доказательство.
Рассмотрим первую краевую задачу
L[ y ] = f ( x), 0 < x < l
y (0) = 0, y (l ) = 0
где 0 < p( x) ∈ C1 (0, l ) ; q ( x), f ( x ) ∈ C[0, l ] .
Решением данной краевой задачи будем считать дважды дифференцируемую функцию,
удовлетворяющую уравнению и граничным условиям.
Пусть соответствующая однородная задача имеет только нулевое решение, т.е.
L[ y ] = 0
⇒ y ( x) ≡ 0
y (0) = 0, y (l ) = 0
Тогда неоднородная (при f ( x ) ≡ 0 ) краевая задача имеет единственное решение (Теорема 1).
Построим это решение.
1.
Пусть известны два нетривиальных решения двух задач Коши для однородного
уравнения с начальными условиями в точках x = 0 и x = l :
⎧ L[ y1 ] = 0,
⎧ L[ y ] = 0,
y1 ( x) ≠ 0 :
y2 ( x ) ≠ 0 : ⎨ 2
и
⎨
⎩ y1 (0) = 0
⎩ y2 (l ) = 0
Тогда y1 (l ) ≠ 0 , так как в противном случае
L[ y1 ] = 0
⎫
⎬
y1 (0) = 0, y1 (l ) = 0 ⎭
Аналогично, y2 ( 0 ) ≠ 0 , иначе
y1 ( x ) ≡ 0 .
⇒
L[ y2 ] = 0
⎫
⎬ ⇒ y2 ( x ) ≡ 0 .
y2 (0) = 0, y2 (l ) = 0 ⎭
2.
Функции y1 ( x) и y2 ( x) - линейно независимы на отрезке x ∈ [0, l ] . Действительно, если
бы y1 и y2 были линейно зависимы, например,
y1 = Cy2 (C ≠ 0),
тогда y1 (l ) = Cy2 (l ) = 0 , что противоречит тому, что y1 (l ) ≠ 0 .
3.
Разрешим исходное уравнение относительно старшей производной
p′
q
f ( x)
y′′ + y′ − y =
= f1 ( x)
p
p
p
и будем строить его решение методом вариации постоянных в виде
y ( x) = C1 ( x) y1 ( x) + C2 ( x) y2 ( x) .
Дифференцируя, получим СЛАУ для C1′( x) и C2′ ( x) :
⎧C ′1( x) y1 ( x) + C ′2( x) y2 ( x) = 0
.
⎨
⎩C ′1( x) y′1( x) + C ′2( x) y′2( x) = f1 ( x)
Определитель данной системы есть определитель Вронского Δ = W ≠ 0 , который отличен от
нуля, так как из результата п. 2. следует, что функции y1 , y2 - линейно независимы. Поэтому
существует единственное решение СЛАУ, которое можно найти по формулам Крамера:
0 y2
y1 0
Δ1 =
= − y2 f1
Δ2 =
= y1 f1
f1 y ′ 2
y′1 f1
y2 ( x ) f ( x )
y ( x) f ( x)
,
.
C ′2 = 1
p ( x)W ( x)
p ( x)W ( x)
Из формулы Лиувилля-Остроградского имеем p ( x )W ( x ) = C = p ( s )W ( s ) , откуда
1
1
C ′1 = − y2 ( x) f ( x),
C ′2 = y1 ( x) f ( x) .
C
C
Далее, путем интегрировании найдем
x
1
C2 ( x) = ∫ y1 ( s ) f ( s ) ds + C20 ,
C0
C ′1 = −
x
C1 ( x) = −
1
C
∫ y ( s) f ( s)ds + C
0
1
2
l
=
1
C
l
∫ y ( s) f ( s)ds + C
2
0
1
.
x
Подставляя C1 ( x) и C2 ( x) в формулу для решения, получим
l
y ( x) =
x
y1 ( x)
y ( x)
y2 ( s) f ( s)ds + 2
y1 ( s) f ( s)ds + C10 y1 ( x) + C20 y2 ( x)
∫
∫
C x
C 0
Из граничных условий определим константы C1 и C2 :
=0
y ( 0) =
y1 ( 0 ) l
y2 ( 0 ) 0
y
(
s
)
f
(
s
)
ds
y1 ( s ) f ( s )ds + C10 y1 ( 0 ) + C20 y2 ( 0 ) = 0
+
2
∫
∫
C 0
C 0
=0
⇒
C20 = 0 ,
⇒
C10 = 0 .
≠0
=0
y (l ) =
y1 ( l )
C
=0
l
∫ y (s) f (s)ds +
y2 ( l )
2
∫ y (s) f (s)ds + C
0
1
1
C
l
l
0
y1 ( l ) + C20 y2 ( l ) = 0
≠0
=0
=0
Следовательно,
x
y ( x) = ∫
0
l
y1 ( s ) y2 ( x)
y ( s ) y1 ( x)
f ( s ) ds + ∫ 2
f ( s ) ds .
C
C
x
Обозначим
⎧ y1 ( s) y2 ( x), 0 ≤ s ≤ x
1 ⎧ y1 ( s) y2 ( x), 0 ≤ s ≤ x
1
=
,
⎨
⎨
C ⎩ y2 ( s) y1 ( x), x ≤ s ≤ l
p ( s)W ( s) ⎩ y2 ( s ) y1 ( x), x ≤ s ≤ l
где G ( x, s ) - функция Грина. Из вида функции Грина следует, что она симметричная, т.е.
⎧ y1 ( x) y2 ( s ), 0 ≤ x ≤ s
1 ⎧ y ( x) y2 ( s), 0 ≤ x ≤ s
1
=
G ( x, s) = ⎨ 1
.
(6)
⎨
C ⎩ y2 ( x) y1 ( s), s ≤ x ≤ l
p( s )W ( s ) ⎩ y2 ( x) y1 ( s), s ≤ x ≤ l
Следовательно,
G ( s, x ) =
l
y ( x) = ∫ G ( x, s ) f ( s ) ds ,
0
что и требовалось доказать.
Замечание (физический смысл функции Грина). Рассмотрим краевую задачу:
L[ y ] = δ ( x − x0 ), x, x0 ∈ ( 0, l )
,
y (0) = 0, y (l ) = 0
т.е. уравнение с внешним источником, сосредоточенным в точке x0 ∈ (0; l ) . Решение методом
функции Грина дает
l
y ( x) = ∫ G ( x, s )δ ( s − x0 ) ds = G ( x, x0 ),
0
т.е. G ( x, x0 ) – это значение решения y ( x) в точке
источник f ( x) = δ ( x − x0 ).
x ∈ (0; l ) ,
если в точке x0 расположен
Пример (статическая задача о профиле струны).
Рассмотрим следующую задачу
y′′( x) = f ( x),
0 < x < 1,
f ( x) ∈ C[0,1]
,
y (0) = 0, y (1) = 0
т.е. в используемых обозначениях p ( x ) ≡ 1, q ( x ) ≡ 0 , а L[ y ] ≡ y ′′ .
Решение.
Рассмотрим однородную задачу, которая, очевидно, имеет только тривиальное решение:
⎧ y′′( x) = 0 ⎯→ y = C1 x + C2
⎪
⎯→ C2 =0
⇒ y≡0
⎨ y (0)=0
⎪ y (1) = 0 ⎯→ C = 0.
⎩
1
Следовательно, исходная задача имеет единственное решение.
Построим функцию Грина. Выберем два решения, каждое из которых удовлетворяет
одному из граничных условий:
⎧ y′′ ( x) = 0
y1 ( x) : ⎨ 1
⇒
y1 ( x) = x
⎩ y1 (0) = 0
⎧ y′′ ( x) = 0
y2 ( x ) : ⎨ 2
⇒ y2 ( x ) = x − 1
⎩ y2 (1) = 0
Далее, воспользуемся формулой (6) и получим
1 ⎧⎪ x ( s − 1) , 0 ≤ x ≤ s
,
G ( x, s ) = ⎨
C ⎪⎩ ( x − 1) s, s ≤ x ≤ 1
где C = p( s )W ( s ) =
s s −1
= 1 . Следовательно,
1 1
⎧⎪ x ( s − 1) , 0 ≤ x ≤ s
G ( x, s ) = ⎨
⎪⎩ ( x − 1) s, s ≤ x ≤ 1
Иногда бывает удобнее не использовать готовую формулу (6) ввиду ее трудной для
запоминания структуры, а действовать непосредственно по определению. Итак, используя
полученные выше функции y1 ( x) и y2 ( x) , ищем функцию Грина в виде
0≤ x≤s
⎧⎪C1 ( s ) y1 ( x) = C1 ( s ) x,
.
G ( x, s ) = ⎨
s ≤ x ≤1
⎪⎩C2 ( s ) y2 ( x) = C2 ( s )( x − 1) ,
Из условий непрерывности функции Грина и скачка ее производной в точке x = s получим
⎧⎪C1 ( s ) s = C2 ( s ) ( s − 1)
⎪⎧C1 ( s) = ( s − 1)
⇒
,
⎨
⎨
C
(
s
)
C
s
1
C
s
C
(
s
)
1
−
=
⇒
=
−
C
(
s
)
s
=
(
)
(
)
⎪
1
1
2
⎩ 2
⎩⎪ 2
откуда тот же, что и выше, окончательный результат
⎪⎧ x ( s − 1) , 0 ≤ x ≤ s
.
G ( x, s ) = ⎨
⎪⎩ ( x − 1) s, s ≤ x ≤ 1
1
Теперь решение задачи запишем в виде
y ( x) = ∫ G ( x, s ) f ( s )ds . Физический смысл
0
полученного решения – профиль струны при статической нагрузке f ( x ) .
В частности, если нагрузка сосредоточена, например, в точке x0 =
2
3
, то интеграл
вычисляется. Точный ответ и соответствующий профиль струны приведены ниже:
1
2
⎧
2⎞
⎧
⎛
− x, 0 ≤ x ≤
1
⎪
′′
δ
y
(
x
)
x
f
(
x
)
=
−
≡
⎪
⎛ 2⎞ ⎪
3
3
⎜
⎟
⇐⇒
y ( x) = ∫ G ( x, s ) f ( s )ds = G ⎜ x, ⎟ = ⎨
3⎠
⎝
⎨
⎝ 3 ⎠ ⎪ 2 ( x − 1), 2 ≤ x ≤ 1
0
⎪ y (0) = 0, y (1) = 0
⎩
⎪⎩ 3
3
Лекция 9
§ 2.
Нелинейные краевые задачи
10.
Постановка задачи.
Рассмотрим двухточечную краевую задачу
d 2u
= f (u , x),
(1)
x ∈ D = (0;1)
dx 2
u (0) = u 0 , u (1) = u 1 .
(2)
Если функция f (u , x) не линейна по переменной u , то решить задачу аналитически
весьма сложно и или вовсе невозможно. Поэтому основные методы решения таких задач –
численные. В основном они основаны на конечно-разностных методах, и среди них можно
выделить следующие.
1)
Разностные методы – производные заменяются конечными разностями, задача
линеаризуется, для ее решения применяется метод прогонки, а затем применяются методы
последовательных приближений.
2)
Метод стрельбы – задается u '(0) = γ и решается начальная задача для u ( x, γ ) .
Параметр γ подбирается так, чтобы u (1, γ ) = u1 .
При этом необходимо установить разрешимость задачи (1)-(2), а при использовании
метода стрельбы важно выделить классы нелинейностей, когда задача (1)-(2) разрешима
указанным методом.
В последние годы важную роль в исследовании различных классов нелинейных задач
приобрели методы качественной теории дифференциальных уравнений, в основе которых
лежат так называемые теоремы сравнения. Этот подход носит также название метод
дифференциальных неравенств. Этот метод развивает и распространяет идеи С.А. Чаплыгина
для начальных задач на более сложные классы задач, в том числе краевые. Основной целью
настоящего раздела курса ДУ является знакомство с этими эффективными подходами.
В качестве вспомогательного результата нам понадобится теорема, доказательство
которой основано на методе стрельбы и приводится в следующем разделе.
20 .
Существование решения в случае ограниченной правой части (метод стрельбы).
Первый достаточно простой результат содержится в следующей теореме.
Теорема 1. Пусть f (u , x) непрерывна, ограничена и удовлетворяет условию Липшица при
−
x ∈ D ( D = [0,1]) , u ∈ R . Тогда задача (1) имеет решение.
Доказательство.
Рассмотрим начальную задачу
u '' = f ( u , x ) , x ∈ (0,1],
u (0) = u 0 , u ' (0) = γ
(3)
Докажем, что можно выбрать параметр γ так, что u (1, γ ) = u1 и, следовательно, решение задачи
(3) будет являться решением задачи (1)-(2) (метод стрельбы).
Лемма 1.
Задача Коши (2) имеет единственное непрерывно зависящее от γ решение.
Результат Леммы 1 является следствием известных теорем существования и
единственности и непрерывной зависимости от параметров решения уравнения n -го порядка,
разрешенного относительно старшей производной.
Продолжим доказательство теоремы. Пусть u ( x, γ ) - решение задачи Коши (3). Тогда,
интегрируя дважды полученное тождество, будем иметь
x
ξ
0
0
u ( x, γ ) = u + γ x + ∫ d ξ ∫ f (u, s)ds ,
0
откуда найдем
1
ξ
0
0
u (1, γ ) = u + γ + ∫ d ξ ∫ f (u , s )ds .
0
В силу условий Теоремы 1 существует постоянная M > 0 такая, что M ≥ f (u, x) при
x ∈ [0;1] ,
u ∈ R . Выберем теперь γ = γ 0 > 0 , тогда
u (1, γ 0 ) ≥ u 0 + γ 0 − M > u1 ,
если γ 0 > 0 достаточно велико. Аналогичным образом получаем, что
u (1, −γ 0 ) ≤ u 0 − γ 0 + M < u1
при достаточно большом γ 0 (выбираем γ 0 так, чтобы выполнялись оба неравенства).
Так как функция u (1, γ ) непрерывна, то существует такое γ ∈ (−γ 0 ; γ 0 ) , что u (1, γ ) = u1 .
При этом значении γ решение задачи (3) является решением задачи (1)-(2). Таким образом,
Теорема 1 доказана.
Замечание. Класс функций f в Теореме 1 достаточно узкий: в него не попадает даже
функция f = u . Поэтому область применимости изложенного метода весьма ограничена.
Поэтому далее рассмотрим конструктивный подход, основанный на методе дифференциальных
неравенств, предложенный японским математиком Нагумо (Nagumo) и являющийся развитием
идей С.А. Чаплыгина.
30 .
Теорема Нагумо.
−
Определение.
Функции α (x ) , β ( x) ∈ C 2 ( D) ∩ C ( D ) называются соответственно
нижним и верхним решениями задачи (1)-(2), если выполняются следующие неравенства:
d 2α
d 2β
−
f
(
α
(
x
),
x
)
≥
0
≥
− f ( β ( x), x) , x ∈ D
dx 2
dx 2
α (0) ≤ u 0 ≤ β (0) , α (1) ≤ u 1 ≤ β (1) .
Пусть существуют α (x ) и β (x ) - нижнее и верхнее решение
Теорема 2 (Нагумо).
задачи (1), причем α ( x ) ≤ β ( x ) , x ∈ [0,1] , а функция f (u , x) - непрерывна и удовлетворяет
условию Липшица по переменной u при u ∈ [α , β ] , x ∈ [0,1] .
Тогда существует решение задачи (1) u (x) , удовлетворяющее неравенствам
α ( x ) ≤ u ( x ) ≤ β ( x ) , x ∈ [0,1] .
Доказательство. Рассмотрим модифицированную задачу (1)-(2):
d 2u
= h(u , x) , x ∈ (0,1)
(1*)
2
dx
u (0) = u 0 , u (1) = u 1 ,
(2)
где
⎧ f ( β , x) + (u − β ) /(1 + u 2 ), u > β
⎪
h(u , x) = ⎨ f (u , x), α ≤ u ≤ β
⎪
2
⎩ f (α , x) + (u − α ) /(1 + u ), u < α .
Лемма 2.
Задача (1*)-(2) имеет решение.
Доказательство.
Проверим, что h(u , x ) удовлетворяет условиям Теоремы 1, т.е. h(u , x ) непрерывна, ограничена и удовлетворяет условию Липшица при x ∈ [0,1] , u ∈ R .
Ее непрерывность очевидна, а ограниченность немедленно следует из непрерывности и
существования предела при u → ±∞.
Проверим выполнение условия Липшица в полосе x ∈ [0,1] , u ∈ R . Легко заметить, что
производная функции h(u , x ) по переменной u при u ≥ β , 0 ≤ x ≤ 1
hu (u , x ) = (1 − u 2 − 2u β ) /(1 + u 2 ) 2
ограничена. Тогда, как известно, функции h(u , x ) удовлетворяет в этой области условию
Липшица
h(u1 , x) − h(u2 , x ≤ L1 u1 − u2 ,
где в качестве постоянной Липшица L1 можно взять L1 = sup hu (u, x) , u ≥ β , 0 ≤ x ≤ 1 .
Аналогично можно показать, что функция h(u , x ) удовлетворяет условию Липшица в
области u ≤ α , 0 ≤ x ≤ 1.
Пусть при α ( x) ≤ u ≤ β ( x ) функция h(u, x) ≡ f (u, x) удовлетворяет условию Липшица с
постоянной L0 . Покажем, что она удовлетворяет условию Липшица в полосе x ∈ [0,1] , u ∈ R .
Рассмотрим лишь случай u2 > β , α ≤ u1 ≤ β . Положим u0 = β , тогда
h(u1 , x) − h(u2 , x) = h(u1 , x) − h(u0 , x) + h(u0 , x) − h(u2 , x) ≤ h(u1 , x) − h(u0 , x) + h(u0 , x) − h(u2 , x) ≤
≤ L0 u1 − u0 + L1 u0 − u2 ≤ L u1 − u2 ,
где L = max( L0 , L1 ).
Таким образом, все условия Теоремы 1 выполнены и, следовательно, задача (1*)-(2)
имеет решение u = u ( x ) . Лемма 2 доказана.
Покажем теперь,
что это решение удовлетворяет неравенствам α ≤ u ≤ β .
Предположим, что нарушается первое неравенство, т.е. существует точка x* ∈ (0,1) такая, что
α ( x* ) − u ( x* ) > 0 . Тогда существует точка x 0 ∈ (0,1) , в которой разность α ( x) − u ( x) достигает
положительного максимума и, следовательно,
(5)
(α ( x) − u ( x))' ' x = x ≤ 0 .
0
В этой точке u (x) удовлетворяет уравнению
−u ''( x0 ) = − f (α ( x0 ), x0 ) + (α ( x0 ) − u ( x0 )) /(1 + u 2 ( x0 )) ,
А α (x ) - дифференциальному неравенству
α ''( x0 ) ≥ f (α ( x0 ), x0 ) .
Складывая два последних соотношения, получим
(α ( x) − u ( x))' ' x = x ≥ (α ( x0 ) − u ( x 0 )) /(1 + u 2 ( x0 )) > 0 ,
0
что противоречит (5), а значит α ( x ) ≤ u ( x ) для всех x ∈ [0,1] . Аналогично показывается что
β ( x ) ≥ u ( x ) при x ∈ [0,1] .
Заметим, что если α ( x) ≤ u ≤ β ( x ) , то имеет место h(u , x) ≡ f (u , x ) , следовательно
решение модифицированной задачи (1*)-(2) является также решением задачи (1)-(2). Это
завершает доказательство теоремы.
40.
Примеры.
Пример 1.
Рассмотрим задачу (1)-(2) с кубической нелинейностью
d 2u
= u (u − ϕ1 ( x))(u − ϕ 2 ( x)) ,
x ∈ (0,1)
dx 2
u (0) = u 0 , u (1) = u 1 ;
u 0 , u1 > 0 ,
предполагая, что ϕ1 ( x) < 0 , ϕ 2 ( x) > 0 – непрерывные при x ∈ [0,1] функции.
Докажем существование решения. Очевидно, что α ( x ) ≡ 0 - нижнее решение. Пусть
ϕ2 = max ϕ2 ( x) . Тогда в качестве верхнего решения можно взять любую постоянную
[0,1]
C = β ( x) ≥ max[ϕ 2 , u 0 , u1 ] . Действительно, в этом случае
следовательно,
f (C , x) ≥ 0
(см. рисунок) и,
d 2β
− f ( β , x) ≤ 0 .
dx 2
Тогда по теореме Нагумо существует решение краевой задачи u ( x) , удовлетворяющее
неравенствам
0 ≤ u ( x ) ≤ β ( x ) = max[ϕ 2 , u 0 , u1 ] .
В качестве нижнего решения можно выбрать также
α ( x ) = δ > 0 , где
δ ≤ min(min ϕ 2 ( x), u 0 , u1 ) , оставив верхнее решение прежним. Таким образом, можно показать
[0,1]
существование
положительного
решения
удовлетворяющего
неравенствам
u ( x) ,
δ ≤ u ( x) ≤ β ( x) .
????????????? График иллюстрирует построение функций α ( x ) и β ( x ) ??????? какой ???????.
Пример 2.
Рассмотрим задачу (1)-(2) со степенной нелинейностью
d 2u
= u p , x ∈ (0,1)
dx 2
u (0) = u 0 , u (1) = u 1 ; u 0 , u 1 > 0 ,
где p > 1 .
В этом случае α ( x ) ≡ 0 - нижнее решение. В качестве верхнего решения можно взять
любую постоянную C = β ( x) ≥ max[u 0 , u1 ] . Тогда по Теореме Нагумо существует
неотрицательное решение краевой задачи u ( x) , удовлетворяющее неравенствам
0 ≤ u ( x ) ≤ β ( x ) = max[u 0 , u1 ] .
Глава 6. Основы теории устойчивости
Лекция 10
§ 1.
Постановка задачи. Основные понятия.
Ранее было показано, что решение задачи Коши для нормальной системы ОДУ
•
x = f ( t, x )
(1)
непрерывно зависит от начальных условий при t ∈ [ a, b] , если правая часть
f ( t, x )
удовлетворяет условиям теорем существования и единственности . В этой главе мы исследуем
зависимость решения задачи Коши от начальных условий, когда t ∈ [t0 , +∞ ) .
Будем предполагать, что для системы уравнений (1) выполнены условия теорем
существования и единственности на множестве таких точек ( t, x ) , что t ∈ (α , +∞ ) , x ∈ D , где
D — открытое множество в пространстве переменного x .
Пусть x = ϕ ( t ) — .решение системы уравнений (1) определенное при t ≥ t0 .
Определение. Решение x = ϕ ( t ) системы (1) называется устойчивым по Ляпунову, если для
∀ε > 0 ∃ δ (ε ) > 0 : ∀ x0 : ϕ ( t0 ) − x0 < δ , решение x = ψ ( t ) : ψ ( t0 ) = x0 определено при t ≥ t0
и ψ (t ) − ϕ (t ) < ε
t ≥ t0 .
Если, кроме того, lim ψ ( t ) − ϕ ( t ) = 0 то решение x = ϕ ( t ) называется асимптотически
t →∞
устойчивым.
Исследование устойчивости решения x = ϕ (t ) системы уравнений (1) может быть
сведено к исследованию устойчивости тривиального решения, т. е. некоторого положения
равновесия другой нормальной системы. В самом деле, введем новую неизвестную функцию
(2)
y (t ) = x (t ) − ϕ (t ) ,
которая удовлетворяет следующей системе уравнений
•
( )
y = f ( t , y + ϕ ) − f ( t, ϕ ) = f1 ( t, y ) ,
(3)
где f1 t, 0 = 0 . При этом устойчивость (по Ляпуновy или асимптотическая) решения x = ϕ (t )
равносильна устойчивости решения y = 0 системы уравнений (3).
В дальнейшем будем считать, что замена (2) уже сделана. Тогда система уравнений (1)
имеет решение x ≡ 0 , т.е. f t, 0 = 0 .
( )
§ 2.
Однородная система линейных дифференциальных уравнений с
постоянными коэффициентами. Устойчивость тривиального решения.
Рассмотрим однородную систему из n линейных дифференциальных уравнений
•
x = Ax ,
где A — постоянная действительная матрица. Пусть λk = μk + iν k ,
собственные значения матрицы A.
k = 1, 2,..., m,
(1)
m≤n —
Лемма 1.
Пусть Re λk = μk < 0, k = 1, 2,..., m , тогда существуют постоянные α > 0, R > 0
такие, что при всех t ≥ 0 для решения системы (1) x = ϕ (t ) справедлива оценка
ϕ ( t ) ≤ Re −α t ,
где норма вектор-функции
m
∑( y )
y ≡ y Rm =
i 2
.
i =1
Как было показано ранее, любое решение x = ϕ ( x ) системы уравнений (1)
Доказательство.
имеет вид
m
ϕ ( t ) = ∑ g k ( t ) eλ t ,
(2)
k
k =1
где g k ( t ) — вектор-функция, каждая координата которой есть некоторый многочлен.
По условию леммы Re λk = μk < 0, k = 1, 2,..., m . Поэтому существует константа α > 0
такая, что
Re λk = μk < −α < 0, k = 1, 2,..., m
(3)
Из (2) следует, что
m
ϕ ( t ) ≤ ∑ g k ( t ) e( μ
k
+ iν k )t
k =1
k =1
m
ϕ (t ) e ≤ ∑ gk ( t ) e
αt
( μk + iν k )t
k =1
⇒
lim
t →0
⇒
≤ ∑ gk ( t ) e
∑ g (t ) e
( μk +α )t
<0
k
k =1
m
∑ g ( t ) e( μ
∃R > 0 :
( μk +α )t
<0 ( 3 )
⇒
k
k
+α )t
=0
≤ R,
⇒
t≥0
⇒
ϕ ( t ) eα t ≤ R ⇒ ϕ ( t ) ≤ Re−α t
⇒
Пусть
m
k =1
m
k =1
Лемма 2.
m
≤ ∑ g k ( t ) e μk t × eα t
Re λk = μk < 0,
k = 1, 2,..., m ,
тогда для любого решения системы (1)
x = ϕ ( t , x0 ) , удовлетворяющего начальному условию ϕ ( 0, x0 ) = x0 , выполнена равномерная на
промежутке t ≥ 0 оценка
ϕ ( t , x0 ) ≤ r x0 e −α t , t ≥ 0 ,
где α > 0, r > 0 - некоторые постоянные.
Доказательство.
Пусть x = ϕ j ( t ) — решение системы уравнений (1) , удовлетворяющее
начальному условию ϕ j (0) = e j = {δ 1j , δ j2 ,… , δ jn } — единичный координатный вектор. Тогда, по
теореме единственности
m
ϕ ( t , x0 ) = ∑ ϕ j (t ) x0j , x0 = { x01 , x02 ,… , x0n } ,
k =1
так как в правой части последнего равенства записано решение системы уравнений (1),
удовлетворяющее при t = 0 тому же начальному условию, что и ϕ ( t , x0 ) .
В силу Леммы 1 существуют постоянные α , R j > 0 такие, что при всех t ≥ 0 верно
ϕ j ( t ) ≤ R j e −α t ,
j = 1, 2,..., n .
Положим R = max { R1 ,…, Rn } , тогда
ϕ j ( t ) ≤ Re −α t ,
j = 1, 2,..., n .
Следовательно, при всех t ≥ 0
m
m
k =1
k =1
ϕ ( t , x0 ) ≤ ∑ ϕ j ( t ) x0j ≤ ∑ Re −α t x0 = nR e −α t x0 = re −α t x0 .
r
Установим теперь необходимые и достаточные условия устойчивости положения
равновесия x = 0 системы уравнений (1).
Теорема.
Для того чтобы положение равновесия x = 0 системы уравнений(1) было
асимптотически устойчивым, необходимо и достаточно, чтобы все собственные значения
матрицы A имели отрицательные действительные части.
Доказательство.
ε > 0 — произвольное положительное число, а
1)
Достаточность.
Пусть
x = ψ ( t ) = ϕ ( t , x0 ) — решение системы уравнений (1), удовлетворяющее начальному условию
ψ ( 0 ) = x0 . В силу Леммы 2 справедлива равномерна при t ≥ 0 оценка
ψ ( t ) ≡ ϕ ( t , x0 ) ≤ r x0 e −α t ,
где α > 0, r > 0
- некоторые постоянные.
ε
Пусть δ = ε / r , тогда если x0 < δ , то ψ ( t ) < r e −α t ≤ ε при всех t ≥ 0 , т.е. положение
r
равновесия устойчиво по Ляпунову.
Так как lim e−α t = 0 , то lim ψ ( t ) = 0 , следовательно, положение равновесия x = 0
t →+∞
t →+∞
асимптотически устойчиво. Достаточность доказана.
2)
Необходимость.
Пусть существует k такое, что Re λk = μk ≥ 0 , тогда положение
равновесия x = 0 не может быть устойчивым по Ляпунову.
В самом деле, положим Re λ`1 = μ1 ≥ 0 и рассмотрим h ≠ 0 - собственный вектор
(
матрицы A , т.е. Ah = λ`1h . Тогда x = Re heλ`1t
h = h1 + ih2 , тогда
((
)
)
)
- решение системы уравнений (1). Пусть
(
)
x = Re h1 + ih2 e( μ1 +iν1 )t = e μ1t h1 cosν 1t − h2 sinν 1t →
/ 0.
Этим же свойством, очевидно, обладает любое решение
t →+∞
x = c Re( he λ`1t ) , которое при
достаточно малом c сколь угодно близко в момент t = 0 к положению равновесия x = 0 , но
при t → +∞ не стремится к нулю. Следовательно, положение равновесия x = 0 не будет
асимптотически устойчивым. Необходимость доказана.
Замечание. Для устойчивости по Ляпунову положения равновесия x = 0 системы уравнений
(1) необходимо (но не достаточно!), чтобы все собственные значения матрицы А имели
неположительные действительные части.
§ 3.
Второй метод Ляпунова. Лемма Ляпунова.
Рассмотрим нормальную систему дифференциальных уравнений
•
x = f ( t, x )
(1)
Будем предполагать, что x = 0 — решение этой системы. Такое предположение, как было
показано в § 1, не нарушает общности. Из него, в частности, следует, что f t, 0 = 0 .
( )
Лемма Ляпунова.
D : x ≤ r , t ≥ t0 .
единственности
и,
Пусть правая часть системы уравнений (1) определена на множестве
Предположим, что выполнены условия теорем существования и
кроме
того,
при
x ≤r
определена
неотрицательная
функция
V ( x ) ≥ 0, V ( x ) ∈ C1 ( x ≤ r ) , обращающаяся в нуль только при x = 0 , причем на множестве D
(
)
n
gradV , f = ∑
i =1
∂V i
f ≤ 0.
∂x i
Тогда решение x = 0 системы уравнений (1) устойчиво по Ляпунову.
Если, кроме того, на множестве D
n
∂V
gradV , f = ∑ i f i ≤ −W ( x )
i =1 ∂x
(
)
где W ( x ) ≥ 0 — некоторая непрерывная функция, обращающаяся в нуль только при x = 0 , то
решение x = 0 асимптотически устойчиво.
Доказательство.
Зададим произвольное ε ∈ (0; r ) и обозначим Sε поверхность шара x ≤ ε .
Пусть
Vε = min V ( x ) .
(2)
x∈Sε
Выберем δ > 0 таким образом, чтобы при
x ≤δ
выполнялось неравенство
V ( x ) ≤ Vε .
(3)
Такое δ существует, поскольку функция V ( x ) непрерывна при x ≤ ε и V (0) = 0 .
Покажем, что всякое решение x = ϕ ( t ) , для которого выполнено ϕ ( t0 ) < δ , определено
при всех t ≥ t0 и удовлетворяет неравенству ϕ (t ) < ε , т. е. решение x = 0 будет устойчивым по
Ляпунову.
В самом деле, пусть непродолжаемое решение x = ϕ ( t ) определено на интервале (ml,m2),
где m2 < +∞ . Тогда по свойству непродолжаемых решений это возможно лишь, если траектория
x = ϕ ( t ) пересекает поверхность Sε (в противном случае при всех t0 ≤ t < m2 выполняется
неравенство ϕ ( t ) < ε и график решения x = ϕ ( t ) не может выйти за пределы замкнутого
ограниченного множества
поверхность Sε .
Обозначим t1
x ≤ ε , t0 ≤ t < m2 ). Таким образом, траектория x = ϕ ( t ) пересекает
(t1 > t0 ) - наименьшее значение параметра t, при котором траектория
впервые достигает поверхности Sε . Рассмотрим сложную функцию V (ϕ ( t ) ) . В силу условий
леммы
т. е. функция V (ϕ ( t ) )
•
n
n
d
∂V
∂V
V (ϕ ( t ) ) = ∑ i (ϕ ) ϕ i ( t ) = ∑ i ( ϕ ) f i ( t , ϕ ) ≤ 0 ,
dt
i =1 ∂x
i =1 ∂x
не возрастает. Но тогда в силу (2) и (3)
Vε > V (ϕ ( t ) ) ≥ V (ϕ ( t1 ) ) ≥ Vε
что невозможно. Следовательно, решение x = ϕ ( t ) определено при всех t ≥ t0 и его траектория
не может достигать поверхности Sε т. е. при всех
верно неравенство ϕ ( t ) < ε .
Первое
утверждение леммы доказано.
Докажем второе утверждение. Зададим произвольное ε > 0 . Выберем δ > 0 так же, как
это делалось выше. Тогда для любой траектории x = ϕ ( t ) , для которой ϕ ( t0 ) < δ , имеет место
неравенство ϕ ( t ) < ε .
Рассмотрим снова функцию V (ϕ ( t ) ) . Покажем, что lim V (ϕ ( t ) ) = 0 . В самом деле,
t →+∞
допустив противное, мы придем к заключению, что у невозрастающей неотрицательной
функции V (ϕ ( t ) ) существует положительный предел
lim V (ϕ ( t ) ) = A > 0 .
t →+∞
(4)
Заметим, что тогда V (ϕ (t ) ) ≥ A, t ≥ t0 , а значит существует постоянная σ > 0 такая, что
ϕ (t ) > σ ,
которой
t ≥ t0 . Действительно, если это не так, найдется последовательность tk ≥ t0 , для
ϕ ( t k ) → 0 ⇒ V (ϕ ( t k ) ) → 0
поскольку V (0) = 0 , что противоречит (4). Таким
образом, для всех t ≥ t0 верно σ ≤ ϕ ( t ) ≤ ε .
По условию леммы W (σ ≤ x ≤ ε ) > 0 . Поэтому существует постоянная α > 0 такая, что
W (σ ≤ x ≤ ε ) ≥ α и
•
n
n
d
∂V
∂V
V (ϕ ( t ) ) = ∑ i (ϕ ) ϕ i ( t ) = ∑ i (ϕ ) f i ( t , ϕ ) ≤ −W (ϕ ) ≤ −α .
dt
i =1 ∂x
i =1 ∂x
Интегрируя неравенство (5) в пределах от t0 до t , получим
(5)
V (ϕ ( t ) ) − V (ϕ ( t0 ) ) ≤ −α ( t − t0 ) ⇒ lim V (ϕ ( t ) ) = −∞ ,
t →+∞
что противоречит V ( x ) ≥ 0 . Таким образом,
lim V (ϕ ( t ) ) = 0 .
(6)
t →+∞
Докажем теперь что
lim ϕ ( t ) = 0 .
t →+∞
Предположим противное, тогда существуют
постоянная η > 0 и последовательность tn → +∞ , для которых ввиду V (0) = 0 верно ϕ ( tn ) ≥ η .
Функция V (η ≤ x ≤ ε ) > 0 , поэтому найдется постоянная β > 0 , для которой имеет место
неравенство V (σ ≤ x ≤ ε ) ≥ β > 0 , откуда следует V (ϕ (t ) ) ≥ β > 0 , что противоречит (6).
Итак, lim ϕ ( t ) = 0 , т.е. положение равновесия x = 0 асимптотически устойчиво.
t →+∞
Замечание. Для облегчения последующих вычислений заметим, что, каково бы ни было
решение x = x (t ) системы уравнений (1), имеет место тождество
n
∂V
d
x (t ) ) f i ( t , x (t ) ) = V ( x (t ) ) .
∑
i (
dt
i =1 ∂x
Пример.
Рассмотрим динамическую систему
•
x = xy 4 ,
•
y = − x2 y .
Положим V ( x, y ) = x 2 + y 4 , т.е. V ( x, y ) ≥ 0 для всех ( x, y ) и обращается в нуль только при
x = y = 0 . Кроме того,
∂V 4 ∂V 2
xy −
x y = −2 x 2 y 4 ≤ 0 .
∂x
∂y
Поэтому, в силу доказанной выше леммы Ляпунова, положение равновесия x = y = 0
рассматриваемой системы устойчиво по Ляпунову.
§ 4.
Исследование на устойчивость по первому приближению (первый метод
Ляпунова). Теорема Ляпунова.
Пусть x = 0
уравнений
-
положение равновесия нормальной системы дифференциальных
•
x = f ( t, x ) ,
(1)
правая часть которой удовлетворяет условиям теорем существования и единственности и имеет
вид
f ( t, x ) = A ( t ) x + F ( t, x ) ,
где A(t ) = a ij (t ) - квадратная матрица. Пусть также
lim
F ( t, x )
x →0
x
=0.
•
x = A ( t ) x называется
первым приближением или линеаризацией исходной системы уравнений (1) в окрестности
∂f i
точки x = 0 . Заметим, что согласно предположениям F t , 0 = 0, a ij (t ) = j t , 0 – матрица
∂x
Якоби.
Линейная однородная система дифференциальных уравнений
( )
( )
Рассмотрим частный случай, когда матрица A(t ) = a ij (t ) постоянна.
Пусть имеется нормальная система уравнений
Теорема Ляпунова.
•
x = Ax + F ( t, x ) ,
( F ( t, 0 ) = 0 )
(2)
где A — постоянная матрица, все собственные значения которой имеют отрицательные
действительные части. Пусть также при всех t ≥ t0 и достаточно малом x
F ( t, x ) ≤ M x
1+α
, α, M > 0 .
Тогда положение равновесия x = 0 системы уравнений (2) асимптотически устойчиво.
Пусть x = x (t ) — решение системы уравнений (2). Введем
Доказательство.
вспомогательную (вообще говоря, комплексную) вектор-функцию y ( t ) : x ( t ) = Ry ( t ) , где R—
невырожденная постоянная матрица.
Тогда
•
y ( t ) = By + G ( t , y )
(3)
B = R −1 AR, G ( t , y ) = R −1 F ( t , Ry )
Из курса линейной алгебры известно, что матрицу R (вообще говоря, комплексную) можно
подобрать так, чтобы матрица В имела вид
⎛ λ1 b21 … bn1 ⎞
⎜
⎟
0 λ2 … bn2 ⎟
⎜
B=
(4)
⎜… … … … ⎟
⎜⎜
⎟⎟
⎝ 0 0 … λn ⎠
(
)
λ1 ,… , λn — собственные значения матрицы A, а элементы bij < b b > 0, i < j , i, j = 1, n по
модулю меньше заданного числа b>0.
В силу условий теоремы
1+α
1+α
1+α
1+α
G ( t , y ) ≤ R −1 ∗ F ( t , Ry ) ≤ R −1 ∗ M ∗ Ry ≤ R −1 ∗ M ∗ R
∗y
= M1 y ,
где M 1 = R −1 ∗ M ∗ R
1+α
. Рассмотрим функцию
n
n
V ( x ) = ∑ yi ( yi ) = ∑ yi = y .
−1
(
)
i =1
*
()
Здесь y = R x , поэтому V x ≠ 0 > 0, V 0 = 0
i =1
2
2
(5)
∂V
n
∑ ∂x
Для вычисления
i =1
fi
i
воспользуемся замечанием, сделанным в конце § 3, и тем
обстоятельством, что в силу теоремы существования и единственности через любую точку
(t , x ) можно провести интегральную кривую x = x ( t ) системы уравнений (2). Поэтому
*⎫
∂V i d
d n i i * n ⎧ i * d i
d
f
V
x
y ( y ) = ∑ ⎨( y )
y + yi ( yi ) ⎬ .
=
=
(
)
∑
∑
i
dt
dt i =1
dt
dt
⎭
i =1 ∂x
i =1 ⎩
Используя (3) и (4), получим
dy i
= λi y i + ∑ bi j y j + G i ,
dt
i< j
n
d ( yi )
*
= λi* ( y
dt
(6)
(7)
) + ∑ (b ) ( y ) + (G )
i *
j *
j *
i *
i
i< j
Подставляя (7) в (6), найдем
n
n
n
∂V i n
i
i *
* i
i *
j i
i *
j * i
i *
i
i *
i * i
λ
λ
f
=
y
y
+
y
y
+
b
y
y
+
b
y
y
+
G
y
+
G
(
)
(
)
(
)
(
)
(
)
(
)
(
)y =
∑
∑
∑∑
∑
i
i
i
i
i
i =1 ∂x
i =1
i =1 i < j
i =1
{
} {
= ∑ ( λ + λ ) y ( y ) + ∑∑ ( b + ( b ) ) y ( y ) + ∑ {G ( y ) + ( G ) y }
n
i =1
*
i
}
i
n
i *
i
i
По условию теоремы
Re λi ≤ − a,
i = 1, 2,..., n .
Gi = (Gi ) ≤ G ≤ M1 y
*
j *
j
i =1 i < j
{
i
Re λi < 0, i = 1, 2,..., n ,
*
i
(8)
В
силу
оценки
(5)
имеем
, поэтому из равенства (8) вытекает
{
n
n
n
∂V i
i 2
i 2
f
≤
−
a
y
+
y
+
Gi
2
∑
∑
∑∑
∑
i
i =1 ∂x
i =1
i =1 i < j
i =1
2
i *
т.е. найдется число a > 0 такое, что
bij = ( bij ) ≤ b .
n
≤ −2aV + 2b y
i *
i
i =1
Пусть
1+α
n
i *
i
}
∑1 + 2 M
i< j
1
y
2 +α
n
R
i *
∑1 = −2aV + 2b
i =1
= −2aV + bn ( n − 1) V + 2 M 1nV
Подберем матрицу
( y ) + (G )
1+
i *
}
yi ≤
n ( n − 1) 2
2 +α
y + 2 M 1n y
=
2
α
2
.
так, чтобы выполнялось b ≤
(9)
a
, а x будем считать
2n ( n − 1)
α
a
. Тогда из (9) получим
4 M 1n
n
∂V i
a
a
f ≤ −2aV + V + V = − aV .
∑
i
2
2
i =1 ∂x
Далее, обозначив −aV ( x ) = W ( x ) , из последнего неравенства на основании леммы
Ляпунова делаем заключение об асимптотической устойчивости положения равновесия
системы (2).
настолько малым, что V 2 ≤
Пример.
Рассмотрим следующую систему дифференциальных уравнений вида (2):
•
•
xy
y2
.
,
x = −x − y +
y = 2x − 3y +
1+ t
1+ t
⎛ −1 −1 ⎞
При t ≥ 0 выполнены все условия теоремы Ляпунова, так как матрица A = ⎜
⎟
⎝ 2 −3 ⎠
имеет собственные значения λ1,2 = −2 ± i .
Поэтому положение равновесия x = y = 0
асимптотически устойчиво.
Замечание 1.
Имеет место следующее утверждение о неустойчивости.
Теорема (о неустойчивости).
Пусть задана нормалъная система уравнений (2) с
постоянной матрицей A , имеющей хотя бы одно собственное значение с положительной
действительной частью. Пусть при t ≥ t0 для достаточно малых значений x выполнено
неравенство F ( t, x ) ≤ M x
1+α
, где α , M > 0 .
Тогда положение равновесия x = 0 системы уравнений (2) неустойчиво.
Замечание 2.
При исследовании устойчивости положения равновесия по первому
приближению важно иметь возможность установить тот факт, что все собственные значения
действительной матрицы A , т. е. все корни характеристического многочлена, имеют
отрицательные действительные части. Известна следующая терема.
Теорема (Гурвица).
Для того чтобы у многочлена Pn ( z ) = z n + a1 z n −1 + … + an −1 z + an с
действительными коэффициентами все корни имели отрицательные действительные части,
необходимо и достаточно, чтобы все главные (угловые) миноры матрицы
1
0
0
… 0 ⎞
⎛ a1
⎜
⎟
a2
a1
1
… 0 ⎟
⎜ a3
⎜ a5
a4
a3
a2
… 0 ⎟,
( ak = 0, k > n )
⎜
⎟
…
…
…
… …⎟
⎜…
⎜a
⎟
⎝ 2 n −1 a2 n − 2 a2 n −3 a2 n − 4 … an ⎠
были положительными, т. е. чтобы
a 1
Δ1 = a1 > 0, Δ 2 = 1
> 0, … ,
a3 a2
a1
a3
Δ n = a5
…
a2 n −1
1
0
0
… 0
a2
a4
…
a1
a3
…
1
a2
…
… 0
… 0 = Δ n −1an > 0
… …
a2 n − 2
a2 n −3
a2 n − 4 … an
Последнее условие можно заменить условием an > 0 , т.е. для многочлена второй степени
P2 ( z ) = z 2 + a1 z + a2
имеем
a1 > 0, a2 > 0 ,
а
P3 ( z ) = z 3 + a1 z 2 + a2 z + a3 нужно a1 > 0, a1a2 − a3 > 0,
§5.
для
многочлена
третьей
степени
a3 > 0 .
Применение теорем Чаплыгина в некоторых задачах теории
устойчивости.
Пусть задано автономное уравнение
dx
(3)
= V ( x) ,
dt
т.е. уравнение, правая часть которого не содержит t явно. Каждый корень уравнения V ( x ) = 0
является решением уравнения (3). Не ограничивая общности, будем считать, что уравнение (3)
имеет стационарное решение x = x0 , т.е. V ( x0 ) = 0 . Стационарное решение является решением
задачи Коши, когда для уравнения (3) задается начальное условие
x(0) = x0 .
(4)
Естественным является вопрос об устойчивости этого решения по Ляпунову, т.е.
устойчивости относительно малых возмущений начального условия, когда вместо условия (4)
для уравнения (3) ставится дополнительное условие
x(0) = xδ
(5)
Стационарное решение x(t ) = x0 задачи (3), (4) называется устойчивым
Определение.
∃δ (ε ) такое, что при xδ − x0 < δ для ∀ t ≥ 0 ∃ x(t ) –
по Ляпунову, если для любого ε > 0
решение задачи (3), (5), такое, что x(t ) − x0 < ε .
Стационарное решение называется асимптотически устойчивым, если оно устойчиво
и удовлетворяет дополнительному требованию x(t ) → x0 при t → ∞ .
Решение, не являющееся устойчивым, называется неустойчивым. Определение
неустойчивости решения может быть дано как отрицание приведенного выше определения
устойчивости.
Ответ на вопрос об устойчивости или неустойчивости стационарного решения задачи
(3), (4) следует из более общей теоремы Ляпунова об устойчивости по первому приближению.
Теорема 5.
Пусть V ( x0 ) = 0 и функция V ( x ) непрерывна вместе с производной в некоторой
окрестности x − x0 ≤ μ .
Тогда решение задачи (3), (4) x = x0 будет устойчивым, если Vx ( x0 ) < 0 , и неустойчивым, если
Vx ( x0 ) > 0 .
Доказательство.
Асимптотическая устойчивость.
Пусть Vx ( x0 ) < 0 . Тогда для ∀ ε > 0 выберем
1.
δ > 0 так, что δ < min( μ , ε ) . Определим функции α (t ) и β (t ) с помощью следующих
выражений:
α (t ) = x0 − δ e − pt , β (t ) = x0 + δ e − pt ,
где p > 0 – постоянная. Покажем теперь, что при достаточно малых δ и p функции α (t ) и
β (t ) являются соответственно нижним и верхним решениями задачи (3), (5), если xδ − x0 < δ .
Тогда, в силу Теоремы 4 решение задачи (3), (5) существует и удовлетворяет неравенствам
α (t ) < x (t ) < β (t ) при 0 ≤ t < ∞ ,
из которых следует, что для x = x0 выполняется определение асимптотической устойчивости.
Проверим выполнение соответствующего дифференциального неравенства для β (t ) .
Имеем, учитывая, что V ( x0 ) = 0 :
dβ
− V ( β ( t ) ) = −δ pe − pt − V ( x0 + δ e − pt ) = −δ pe − pt − V ( x0 + δ e − pt ) + V ( x0 ) − V ( x0 ) =
dt
= −δ pe− pt − ⎡⎣V ( x0 + δ e− pt ) − V ( x0 ) ⎤⎦ − V ( x0 ) = −δ pe − pt − ⎡⎣V ( x0 + δ e− pt ) − V ( x0 ) ⎤⎦ =
=0
(по теореме Лагранжа)
= −δ pe− pt − Vx ( x0 + θδ e− pt ) δ e− pt = δ e− pt − p − Vx ( x0 ) − Vx ( x0 + θδ e− pt ) + Vx ( x0 ) =
(
(
)
)
= δ e− pt − p − Vx ( x0 ) − ⎡⎣Vx ( x0 + θδ e− pt ) − Vx ( x0 ) ⎤⎦ .
где 0 ≤ θ ≤ 1 . Выберем δ таким малым, чтобы
Vx ( x0 + θδ e− pt ) − Vx ( x0 ) ≤ η <
тогда
Выберем 0 < p <
−Vx ( x0 )
,
2
V (x ) ⎞
⎛
dβ
− V ( β ( t ) ) ≥ δ e − pt ⎜ − p − x 0 ⎟ .
dt
2 ⎠
⎝
−Vx ( x0 )
2
. Тогда, поскольку Vx ( x0 ) < 0 , получим, что
dβ
− V ( β (t ) ) > 0 , т.е. β (t )
dt
- верхнее решение.
dα
− f (α (t )) < 0 (сделайте это самостоятельно),
dt
т.е. α (t ) – нижнее решение. Первая часть теоремы 5 доказана.
Аналогично проверяется неравенство
2.
Неустойчивость.
Пусть Vx ( x0 ) > 0 . Покажем, что ∃ ε > 0 такое, что для ∀ δ > 0
∃ xδ , xδ − x0 < δ такое, что ∃ t > 0 , при котором решение задачи (3), (5) x ( t ) отклонится от
стационарного решения больше чем на ε : x ( t ) − x0 > ε . Это будет означать, что стационарное
решение задачи (3), (4) является неустойчивым.
Рассмотрим интервал xδ − x0 < δ и построим нижнее решение задачи (3), (5) в виде
α (t ) = x0 + ρ (1 − σ e − pt ) ,
где 0 < ρ < μ , 0 < σ < 1 , p > 0 – постоянные.
Поскольку α (0) = x0 + ρ (1 − σ ) , то выбирая σ достаточно близким к единице, можно
получить α (0) меньше ∀ xδ :
xδ − x0 < δ . При t → ∞ α (t ) → x0 + ρ снизу, и, следовательно,
при t больших некоторого t * α (t ) > x0 +
ρ
2
. Следовательно, решение x ( t ) задачи (3), (5) (если
оно существует) в силу Теоремы 3 отклонится от стационарного решения больше чем на ε =
x ( t ) − x0 > α ( t ) − x0 >
ρ
ρ
2
:
. Это и означает неустойчивость стационарного решения.
2
Остается проверить, что α (t ) удовлетворяет неравенству для нижнего решения. Имеем
dα
− V (α ( t ) ) = ρσ pe − pt − V (α ( t ) ) = ρσ pe − pt − V (α ( t ) ) + V ( x0 ) − V ( x0 ) =
dt
= ρσ pe − pt − ⎡⎣V (α ( t ) ) − V ( x0 ) ⎤⎦ − V ( x0 ) = ρσ pe − pt − ⎡⎣V (α ( t ) ) − V ( x0 ) ⎤⎦
(по теореме Лагранжа)
(
)
= ρσ pe − pt − Vx x0 + θρ (1 − σ e− pt ) ρ (1 − σ e− pt ) =
(
)
= −Vx ( x0 ) ρ (1 − σ e− pt ) + ρσ pe− pt + ⎡Vx ( x0 ) − Vx x0 + θρ (1 − σ e− pt ) ⎤ ρ (1 − σ e− pt ) ,
⎣
⎦
где 0 ≤ θ ≤ 1 .
dα
− f (α (t )) == −Vx ( x0 ) ρ (1 − σ e − pt ) + ρσ pe − pt + ⎡Vx ( x0 ) − Vx x0 + θρ (1 − σ e − pt ) ⎤ ρ (1 − σ e − pt )
⎣
⎦
dt
Выберем ρ столь малым, что
(
(
)
)⎦
ρσ pe− pt + ⎡Vx ( x0 ) − Vx x0 + θρ (1 − σ e− pt ) ⎤ ρ (1 − σ e− pt ) < Vx ( x0 ) ρ (1 − σ e− pt ) . Тогда получим, что
⎣
dα
− f (α (t )) < 0 . Этим завершается доказательство второй части теоремы 5.
dt
Пример.
Рассмотрим уравнение (3) в случае, когда V ( x ) = x ( x 2 − 1)
и исследуем
устойчивость его стационарных точек. Получаем три стационарные точки: x = ±1 и x = 0 .
Производная равна Vx ( x ) = 3x 2 − 1 . В стационарных точках Vx (±1) = 2 > 0 , Vx ( 0 ) = −1 < 0 .
Следовательно, стационарные точки
асимптотически устойчивая.
x = ±1 – неустойчивые, а стационарная точка x = 0 –
Лекция 11
§ 6.
Классификация точек покоя линейной системы двух уравнений с
постоянными действительными коэффициентами.
Рассмотрим систему двух линейных дифференциальных уравнений с постоянными
действительными коэффициентами
⎧ dx
⎪⎪ dt = a11 x + a12 y
(1)
⎨
dy
⎪ =a x+a y
21
22
⎪⎩ dt
Точка покоя этой системы – начало координат x = y = 0 . Характеристическое уравнение
имеет вид:
a11 − λ
a21
a12
=0
a22 − λ
⇔
λ 2 − ( a11 + a22 ) λ + ( a11a22 − a12 a21 ) ≡ λ 2 − λ Tr A + det A = 0
При решении последнего уравнения возможны следующие варианты.
1)
Вещественные различные ненулевые собственные значения. В этом случае в некоторой
системе координат общее решение системы (1) имеет вид
x = C1eλ1t ,
⎛ x ⎞
y = C2 eλ2t , где t = ln ⎜ ⎟
λ1 ⎝ C1 ⎠
1
λ2
⇒
⎛ x ⎞ λ1
y = C2 ⎜ ⎟ .
⎝ C1 ⎠
λ2 ⎛
⎜ > 0,
⎛ x ⎞ λ1 ⎜⎝
а)
Пусть λ1 < λ2 < 0 , тогда x = C1eλ1t → 0, y = C2 eλ2t → 0, y = C2 ⎜ ⎟
t →+∞
t →+∞
⎝ C1 ⎠
Точка покоя x = y = 0 – устойчивый узел – асимптотически устойчива.
б)
Пусть
0 < λ1 < λ2 , тогда x = C1eλ1t → ∞,
t →+∞
y = C2eλ2t → ∞,
t →+∞
⎛ x ⎞
y = C2 ⎜ ⎟
⎝ C1 ⎠
λ2 ⎞
<1⎟
λ1 ⎟⎠
⎞
λ2 ⎛
λ
⎜ > 0, 2 >1⎟⎟
λ1 ⎜⎝
λ1 ⎠
Точка покоя x = y = 0 – неустойчивый узел – неустойчива.
λ2
в)
Пусть λ1 < 0 < λ2 , тогда x = C1e
λ1t
→ 0,
t →+∞
y = C2 e
λ2t
→ ∞,
t →+∞
⎛ x ⎞ λ1
y = C2 ⎜ ⎟
⎝ C1 ⎠
( <0)
.
Точка покоя x = y = 0 – седло – неустойчива.
Траектории решений системы (1) вблизи точек покоя представлены на рисунке.
.
.
устойчивый узел
неустойчивый узел
седло
Комплексно – сопряженные собственные значения λ1 = α + iβ , λ2 = α − i β . Тогда в
2)
некоторой системе координат общее решение рассматриваемой системы (1)
x2 y 2
x = C1eα t cos β t , y = C2 eα t sin β t ⇒
+ 2 = e 2α t .
2
C1 C2
а)
Пусть α < 0 , тогда точка покоя x = y = 0 – устойчивый фокус – асимптотически
устойчива.
б)
Пусть α > 0 , тогда точка покоя x = y = 0 – неустойчивый фокус – неустойчива.
в)
Пусть α = 0 , тогда точка покоя x = y = 0 – центр – устойчива, но не асимптотически.
Траектории решений системы (1) вблизи точек покоя представлены на рисунке.
устойчивый фокус
неустойчивый фокус
λ1 = λ2 = λ . Тогда общее решение
Простые кратные собственные значения
3)
рассматриваемой системы (1) имеет вид
x = C1eλt ,
y = C2 e λ t
центр
⇒
C2
x.
C1
– устойчивый дикритический узел –
y=
а)
Пусть λ < 0 , тогда точка покоя x = y = 0
асимптотически устойчива.
б)
Пусть λ > 0 , тогда точка покоя x = y = 0 – неустойчивы дикритический узел –
неустойчива.
Непростые кратные собственные значения
4)
системы (1) выглядит так:
x = C1eλt ,
а)
Пусть
y = ( C2 + C1t ) eλt ,
где
λ < 0 , тогда точка покоя
λ1 = λ2 = λ . В этом случае общее решение
⎛
⎛ x ⎞
C ⎛ x ⎞⎞ x
⇒
ln ⎜ ⎟
y = ⎜⎜ C2 + 1 ln ⎜ ⎟ ⎟⎟
λ ⎝ C1 ⎠
λ ⎝ C1 ⎠ ⎠ C1
⎝
x = y = 0 – устойчивый вырожденный узел –
t=
1
асимптотически устойчива.
б)
Пусть λ > 0 , тогда точка покоя
неустойчива.
x = y = 0 – неустойчивый вырожденный узел–
Траектории решений системы (1) вблизи точек покоя представлены на рисунке.
дикритический узел
вырожденный узел
нулевое с.з.
5)
Пусть имеется нулевое собственное значение λ1 ≠ 0,
имеет вид
x = C1eλ1t , y = C2 .
§ 7.
λ2 = 0 . Тогда решение (1)
Консервативная механическая система с одной степенью свободы.
Консервативная механическая система с одной степенью свободы (без трения)
описывается уравнением второго порядка
••
Где
x = f ( x) ,
f ( x ) - функция класса C (a, b) . Тогда функция
(1)
1
x
U ( x ) = − ∫ f (ξ )d ξ ,
c ∈ ( a, b )
(2)
c
называется потенциальной энергией механической системы.
Уравнение второго порядка (1) эквивалентно системе уравнений
•
x= p
•
p = f ( x ) = −U ′ ( x )
.
(3)
Непрерывность производной f ′( x ) обеспечивает, в силу соответствующих теорем,
существование и единственность решения задачи Коши для системы уравнений (3).
Положению равновесия x = x0 уравнения (1) соответствует точке покоя x = x0 , p = 0 системы
уравнений (3). Положение равновесия x = x0 уравнения (1) является также стационарной точкой
потенциальной энергии U ( x) . В самом деле, если x = x0 — положение равновесия, то
f ( x0 ) = 0 и, в силу (2), U ′( x0 ) ≡ − f ( x0 ) = 0 .
В случае, когда x0 является точкой строгого экстремума потенциальной энергии U ( x) ,
имеет место следующая теорема.
Теорема.
Пусть f ( x ) - функция класса C 2 (a, b) . Тогда,
1) если x = x0 - точка строгого минимума потенциальной энергии U ( x) , то положение
равновесия x = x0 , p = 0 системы уравнений (3) устойчиво по Ляпунову;
2) если x = x0 - точка строгого максимума потенциальной энергии U ( x) и
положение равновесия x = x0 , p = 0 системы уравнений (3) неустойчиво.
Доказательство.
Без ограничения общности можно считать x0 = 0 , так как
можно добиться заменой переменных y = x − x0 .
Пусть x = 0 - точка строгого минимума потенциальной энергии, тогда
окрестности этой точки имеет место U ( x) > U (0) при x ≠ 0 . Рассмотрим функцию
f ′( x0 ) > 0 , то
этого всегда
в некоторой
p2
V ( x, p ) = U ( x ) − U ( 0 ) +
2
- полная энергия механической системы. Тогда
∂V
∂V
p+
( −U ′ ( x ) ) = 0 ,
∂x
∂p
следовательно, в силу леммы Ляпунова, положение равновесия x = x0 , p = 0 устойчиво по
Ляпунову.
Пусть x = 0 - точка строгого максимума потенциальной энергии U ( x) и f ′(0) > 0 ,
тогда U ′(0) = 0 , U ′′(0) = − f ′(0) < 0 и
1
1
U ′ ( x ) = U ′ ( 0 ) + U ′′ ( 0 ) x + U ′′′ (θ x ) x 2 = U ′′ ( 0 ) x − f ′′ (θ x ) x 2 ,
0 < θ < 1.
N
2
2
=0
− f ′′(θ x )
F ( x)
Система (3) принимает вид
•
•
p = −U ′′ ( 0 ) x + F ( x ) ,
x = p,
(4)
1
f ′′ (θ x ) x 2 , и при достаточно малых x имеет место оценка F ( x) ≤ Mx 2 .
2
Линеаризуем систему уравнений (4):
где F ( x ) = −
•
•
p = −U ′′ ( 0 ) x .
x = p,
Матрица
системы
1⎞
⎛ 0
A=⎜
⎟ имеет действительные собственные значения
′′
−
U
(0)
0
⎝
⎠
λ = ± −U ′′(0) , одно из которых положительно.
Поэтому, в силу теоремы о неустойчивости,
положение равновесия x = 0, p = 0 .
Теорема доказана.
3амечание. Как видно из доказательства, первое утверждение теоремы остается
справедливым также в случае, когда f ( x ) - функция класса C1 (a, b) . Можно показать, что и
второе утверждение теоремы остается верным при этих же предположениях.
§8.
Фазовая плоскость для нелинейного автономного уравнения 2-го
порядка.
10.
Постановка задачи.
Рассмотрим автономное дифференциальное уравнение
••
x = f ( x)
Это
уравнение
эквивалентно
следующей
нормальной
дифференциальных уравнений (ОДУ) первого порядка:
•
•
системе
(1)
обыкновенных
x = p,
p = f ( x ) = −U ′ ( x )
Точки покоя этой системы ДУ определяются из системы алгебраических уравнений
(2)
⎧⎪p = 0
⎨ f (x ) = 0 .
⎪⎩
Пусть уравнение
имеет n корней
f (x ) = 0
x =x ,
0
i
i = 1,2,..., n .
Тогда точки
(x , 0)
0
i
(3)
фазовой плоскости ( x , p )
являются точками покоя системы (2). Ниже будем предполагать, что корни уравнения (3)
простые, т.е. fx′ ( x i0 ) ≠ 0,
i = 1, 2,..., n .
На практике бывает нужно не только исследовать устойчивость точек покоя, но и знать
расположение всего множества траекторий на фазовой плоскости. Напомним, что фазовой
траекторией называется проекция интегральной кривой на фазовую плоскость. Фазовые
траектории могут быть эффективно использованы для качественного описания поведения
решения. Для уравнения вида (1) это описание будет достаточно простым и полным. Кроме
того, оказывается, что расположение фазовых траекторий в малой окрестности точек покоя
уравнения (1) полностью аналогично расположению фазовых траекторий для линеаризованного
уравнения (1) (линеаризованной системы (2)).
20.
Система первого приближения.
Выберем одну из точек x = xi0 и разложим функцию f ( x ) в ряд Тейлора в окрестности
этой точки с точностью до членов первого порядка
f (x ) = f ( x i0 ) + fx′ ( x i0 )( x − x i0 ) + ο ( x − x i0 ) .
N
=0
Сохраним в правой части системы (2) только линейные слагаемые и получим
•
x = p,
систему первого приближения.
Обозначим x − x i0 = x .
•
p = f x′ ( xi0 )( x − xi0 )
-
В новых переменных ( x , p ) исследование точки покоя
( x, p ) = ( x , 0 ) сводится к исследованию точки покоя ( x , p ) = ( 0, 0 ) системы
0
i
•
x = p,
p = fx′ ( x i0 ) ⋅ x .
•
Исследуем характеристические числа этой системы. Корни характеристического
уравнения
−λ
1
= λ 2 − fx′ ( x i0 ) = 0
⇒
λ1,2 = ± fx′ ( x i0 ) .
0
fx′ ( x i ) −λ
Если fx′ ( x i0 ) > 0 , то характеристические числа действительные и разных знаков, если
fx′ ( x i0 ) < 0 , то характеристические числа чисто мнимые. В первом случае из теоремы Ляпунова
об устойчивости по первому приближению следует, что соответствующая точка покоя системы
(2) является неустойчивой. Во втором случае эта теорема ответ об устойчивости не дает.
Для системы первого приближения в случае действительных λ1,2 разных знаков точка
покоя является седлом, а в случае чисто мнимых λ1,2 - центром. Эта классификация
переносится и на систему (2) и уравнение (1).
30.
Фазовые траектории.
В области p > 0 фазовый портрет системы (2), а, следовательно, и уравнения (1)
образуют фазовые траектории, являющиеся интегральными кривыми уравнения
dp f (x )
=
(4)
dx
p
Переменные в уравнении (4) разделяются pdp = f (x )dx , откуда
p2
= ∫ f (x )dx + C
или
p = 2∫ f (x )dx + C .
2
Аналогично, в области p < 0 ,
p = − 2 ∫ f (x )dx + C .
C
интегральные кривые, если они существуют,
Очевидно, что при каждом
расположены симметрично относительно оси x на фазовой плоскости. Фазовые траектории
уравнения (4), проходящие через точки покоя типа седла, называют сепаратрисами. Можно
показать, что движение точки фазовой плоскости по сепаратрисам, проходящим через данное
седло ( x 0, 0 ) , происходит так, что точка приближается к этому седлу при t → +∞ или при
t → −∞ .
Уравнения сепаратрис, проходящих через седловую точку ( x 0, 0 ) , удобно записывать в
виде
x
p = ± 2 ∫ f (s )ds .
(5)
x0
Отметим, что в силу автономности уравнения (1) и единственности решения задачи Коши для
этого уравнения, через каждую точку ( x 0 , p 0 ) фазовой плоскости может проходить только одна
фазовая траектория, откуда следует, что фазовые траектории уравнения (1) не пересекаются.
Точки покоя не могут лежать на фазовых траекториях системы, поскольку они сами являются
решениями системы, и таким образом, будет нарушена единственность решения системы.
Фазовые траектории могут лишь стремиться к указанным точкам при t → +∞ или при t → −∞ .
Если начальное условие задачи Коши соответствует точке покоя, то решение не меняется при
изменении t , оставаясь этой точкой покоя.
40.
Примеры решения задач.
Пример 1.
Уравнение с квадратичной нелинейностью.
d 2x
= x (a − x ) ≡ f ( x ) , где a > 0 .
Рассмотрим уравнение вида
dt 2
эквивалентно системе ОДУ 1-го порядка:
•
x = p,
•
p = x (a − x)
Это уравнение
(6)
Корни x1 = 0, x2 = a уравнения f ( x ) = 0 определяют две точки покоя системы (6)
( x , p ) = ( 0, 0 ) и ( x , p ) = (a, 0 ) . Причем, fx′ ( 0 ) = a > 0 ; fx′ (a ) = −a < 0 , поэтому ( 0, 0 ) - точка
покоя - седло, (a, 0 ) - точка покоя - центр.
Получим явное выражение для фазовых траекторий системы (6). В соответствии с п. 3,
p2
= ∫ x (x − a )dx + C = −U (x ) + C ,
2
x3
x2
U (x ) =
−a .
где
3
2
Тогда уравнения фазовых траекторий описываются формулой
p = ± 2 ∫ x (x − a )dx + C = ± −2U (x ) + C .
(7)
Графики функции f ( x ) и ее первообразных при различных значениях C , а также
фазовые портрет для системы (6) изображены на рисунках 1- 3.
f(x)
рис. 1
3a
2
S1
a
p2
=
2
∫
f
(x ) d x
x
S2
+C
рис. 2
3a
2
a
x
p
рис. 3
3a
2
a
x
На рисунке 1 показана функция f ( x ) .
На рисунке 2 представлены различные первообразные функции f ( x ) :
p2
= ∫ f (x )dx + C = −U (x ) + C .
2
Черным цветом выделена первообразная, соответствующая сепаратрисе. Значение этой
первообразной в каждой точке численно равно площади под кривой f ( x ) , изображенной на
рисунке 1. Здесь мы полагаем значение площади под графиком f ( x ) положительным при
p2
f ( x ) > 0 и отрицательным при f ( x ) < 0 . В области положительных значений x функция
2
возрастает до тех пор, пока f ( x ) > 0 . В точке x = a график f ( x ) проходит через ноль и затем
p2
становится меньше нуля, т.е.
начинает убывать.
2
p2
обратится в
2
из
уравнения
Когда площади S1 и S 2 сравняются по абсолютной величине, U ( x ) = −
x = x
определить
3a
∫0 x (a − x )dx = −∫a x (a − x )dx , то есть ∫0 x (a − x ) dx = 0 . Это точка x = 2 . Дальше в область
нуль.
Соответствующее
значение
x
a
можно
x
p2
может принимать
положительных значений x сепаратрису продолжить нельзя, так как
2
только неотрицательные значения.
x
p2
= ∫ f (x )ds принимает
В области отрицательных значений x функция
2
0
положительные значения при f ( x ) < 0 и, следовательно, U (x ) = −
p2
2
существует при всех
отрицательных x .
На рисунке 3 черным цветом показаны сепаратрисы седла (0, 0) . На фазовой плоскости
(рис.3) сепаратриса, расположенная в правой полуплоскости, образует так называемую петлю.
Стрелками показано направление движения точки по фазовой траектории при изменении t .
dx
Это направление можно определить, исходя из следующих соображений: если p =
> 0 , то x
dt
– возрастает, т.е. движение происходит направо.
Будем изменять значение C . При увеличении C кривая (график первообразной) на
рисунке 2 приподнимается (синий цвет). Формула (7) определяет незамкнутые фазовые
траектории, которые продолжаются вправо до некоторой точки, лежащей правее x .
При уменьшении C кривая на рисунке 2 опускается и её положительная часть будет
состоять из двух отдельных кривых (красный цвет). Формула (7) определяет в правой
полуплоскости замкнутые траектории, стягивающиеся с уменьшением C к точке покоя (a, 0 ) .
Эти замкнутые траектории соответствуют периодическим движениям. В левой полуплоскости
рис. 3 формула (7) определяет незамкнутые траектории.
При каких значениях x 0 разрешима краевая задача
d 2x
= x (a − x ) , x ( 0 ) = x 0 , x ( ∞ ) = 0 .
2
dt
Решение.
Согласно п. 30, точка фазовой плоскости, двигаясь по сепаратрисе седла ( 0, 0 ) ,
приближается к этому седлу либо при t → +∞ , либо при t → −∞ . Поэтому разрешима при тех
x 0 , которым соответствует точка фазовой плоскости, лежащая на сепаратрисе, входящей в
точку покоя ( 0, 0 ) .
Задача.
(x 0, p ( 0) ) фазовой плоскости
находилась на сепаратрисе. Тогда, двигаясь по сепаратрисе от точки ( x 0 , p ( 0 ) ) в направлении
•
Подберем значение x ( 0 ) = z ( 0 ) так, чтобы точка
t → +∞ , она будет приближаться к точке ( 0, 0 ) при t → +∞ .
3a
3a
При x 0 < 0 и x 0 =
задача имеет единственное решение. Если 0 < x 0 <
, то задача
2
2
имеет два решения, так как каждому x 0 , лежащему внутри петли, соответствует два значения
p ( 0 ) таких, что точка ( x 0 , p ( 0 ) ) лежит на петле, то есть на сепаратрисе, входящей в точку
3a
покоя ( 0, 0 ) . В случае p 0 >
, очевидно, решений краевой задачи нет.
2
Пример 2.
Уравнение с кубической нелинейностью. В этом случае в зависимости от вида
функции f ( x ) могут представиться следующие варианты.
а)
Симметричный случай - ячейка на фазовой плоскости.
Построим фазовый портрет уравнения
d 2x
= f (x ) ≡ x ( x 2 − a 2 ) .
dt 2
Определим точки покоя:
f (x ) = 0
⇔ x (x 2 − a 2 ) = 0
⇒
x = 0, x = ± a .
f(x)
рис.4
S1
S1
S1
S1
-a
x
a
рис.5
p2
2
-a
a
x
рис.6
p
1
-a
2
a
x
На рис.4 показан график функции f (x ) = x ( x 2 − a 2 ) . Найдем по этому графику знак
производной fx′ в точках покоя x = 0, x = ± a : fx′ ( 0 ) < 0 , fx′ ( ±a ) > 0 . Поэтому, согласно §5,
точка ( 0, 0 ) - центр, а точки (a, 0 ) и ( −a, 0 ) - сёдла.
x
2
p2
x4
2 x
= ∫ f (x )dx =
−a
+ C (рис. 5). Заметим,
Запишем уравнения первообразных
2
4
2
a
что функция f ( x ) - нечетная, значит её первообразная - функция четная, и фазовый портрет
будет симметричным относительно оси ординат.
В силу симметрии имеем
x
∫ f (s ) ds =
a
x
∫ f (s ) ds , и уравнения сепаратрис седловых точек (a, 0 )
и ( −a, 0 ) можно записать в
−a
x
одной формулой:
p = ± 2 ∫ f (x )ds .
a
На рисунке 6 сепаратрисы выделены черным цветом. Сепаратрисы 1 и 2 оказываются
общими для обоих сёдел. В этом случае говорят, что сепаратрисы 1 и 2 образуют ячейку на
фазовой плоскости.
Будем изменять значение C . При увеличении C график первообразной приподнимается
над осью OY . Соответствующая фазовая траектория будет определена на всей вещественной
оси (рис.6, синий цвет).
Если уменьшать значение C , то график первообразной опускается относительно оси
x2
OY , и область неотрицательных значений U ( x ) = −
будет состоять из трех промежутков
2
(рис.5, кривые красного цвета). Внутри промежутка −a < x < a этим значениям C
соответствуют замкнутые фазовые траектории, а при x > a - незамкнутые фазовые траектории
(рис.6, кривые красного цвета).
При больших по абсолютной величине отрицательных значениях C функция
p2
U (x ) = −
принимает неотрицательные значения только если x достаточно велико. Этим
2
значениям C соответствуют незамкнутые фазовые траектории, обозначенные на рисунке 6
сиреневым цветом.
б)
Несимметричный случай.
Построим фазовый портрет уравнения
d 2x
= f (x ) ≡ x ( x + a1 )( x − a2 ) ,
0 < a 2 < a1 .
dt 2
Точки покоя этого уравнения:
x = 0, x = −a1, x = a 2 .
На рисунке 7 показан график функции f (x ) = x ( x + a1 )( x − a2 ) . Определим по этому
графику знак производной fx′ для каждого значения x , соответствующего точкам покоя:
fx′ ( 0 ) < 0, fx′ ( −a1 ) > 0, fx′ (a2 ) > 0 . Следовательно, точка ( 0, 0 ) - точка покоя центр, а точки
( −a1, 0 ) и (a2, 0 )
- сёдла.
p2
= ∫ f (x )dx + C . При достаточно
2
больших C > 0 график первообразной приподнимется над осью OY (кривые синего цвета).
Если значение C уменьшается, то график первообразной опускается.
x
p2
Сиреневым цветом показана первообразная
= ∫ f (s )ds . Она касается оси OY в точке
2 a2
На рисунке 8 изображены графики первообразных
(a2, 0 ) .
На фазовой плоскости (рис.9) ей соответствуют сепаратрисы седла (a2 , 0 ) .
x
Сепаратрисы седла (−a1 , 0) описываются уравнением p = ± 2 ∫ f (s ) ds и изображены
−a1
на фазовой плоскости (рис.9) черным цветом. В остальном рассмотрение фазового портрета
аналогично случаю с квадратичной нелинейностью.
f(x)
рис.7
S1
S1
S2
S2
-а1
рис.8
а2
x
p2
2
а2
-а1
x
рис.9
p
x
Пример 3.
Математический маятник.
Рассмотрим поведение фазовых кривых следующего автономного ОДУ второго порядка:
d 2x
= f (x ) ≡ − sin x .
dt 2
Это уравнение эквивалентно системе ОДУ 1-го порядка
•
•
x = p,
p = − sin x .
Корни x = π m
уравнения f ( x ) = 0 определяют точки покоя этой системы ДУ
⎧⎪−1, m = 2k
Заметим,
что
fx′ (π m ) = ⎨
, k ∈Z ,
следовательно,
(x m , p ) = (π m, 0 ) .
⎪⎩ 1, m = 2k + 1
(x 2k +1, p ) = ( (2k + 1) π , 0 ) - точки покоя типа седло, (x 2k , p ) = ( 2k π , 0 ) - точки покоя типа центр.
Получим явное выражение для фазовых траекторий:
p2
= − ∫ sin xdx + C = − cos x + C .
2
В рассматриваемом случае U (x ) = − cos x , поэтому, уравнения фазовых траекторий
p = ± 2 cos x + C ,
C ≥ −2 .
Фазовый портрет изображен на рисунке 10.
Рис. 10
При C = 2 получаем сепаратрису, соединяющую точки покоя. Если −2 < C < 2 , то
фазовые траектории замкнуты и заполняют область между сепаратрисами («захваченные»
частицы, совершающие финитные колебания в потенциальных ямах). В случае C > 2 фазовые
траектории незамкнуты и соотвествуют «пролетным» частицам, движение которых инфинитно
(периодические колебания около некоторого значения скорости), причем верхней и нижней
ветвям фазовых кривых соответствуют различные направления скорости.
Задание.
Докажите устойчивость точки покоя (0, 0) математического маятника
1) при помощи определения;
x
2) методом функций Ляпунова, выбрав V (x , p) = 4 sin2 + p 2 .
2
Глава 7. Понятие об асимптотических методах
Лекция 12
§ 1.
Регулярно и сингулярно возмущенные задачи.
При построении математических моделей физических объектов, характеризующихся
различными масштабами по пространству, либо различными скоростями протекающих в
системе процессов, часто возникают задачи, содержащие малые параметры. В этих случаях
естественно поставить вопрос: если упростить математическую модель, положив малый
параметр равным нулю (т.е. пренебречь влиянием некоторых процессов или составных частей
физической системы), получим ли мы решение, приближенно описывающее исходный объект
моделирования?
Пусть математическая модель в некоторой области D изменения переменных
описывается уравнением
(1)
Lμ u = 0 ,
где оператор Lμ зависит от малого параметра μ .
Обозначим решение этой задачи
uμ .
Положив параметр μ равным нулю, получим вырожденное (т.е. при μ = 0 ) уравнение
L0u = 0 , решение которого обозначим u0 .
Определение. Задача (1) называется регулярно возмущенной, если решение u0 вырожденного
уравнения L0u = 0 дает равномерное в области D приближение для решения u μ задачи (1).
В противном случае задача (1) называется сингулярно возмущенной.
Примером регулярно возмущенной задачи является задача Коши для обыкновенного
дифференциального уравнения на конечном отрезке 0 ≤ x ≤ H , малый параметр μ в котором
находится в правой части, т.е.
dy
= f ( y, x, μ )
,
(2)
dx
0
y (0, μ ) = y
где 0 < μ ≤ μ0 - малый параметр. В этом случае работает доказанная ранее теорема о
непрерывной зависимости решения от параметра и, следовательно, полагая формально μ = 0 ,
получаем (обычно более простую) задачу
dy
= f ( y, x, 0 )
,
dx
0
y (0) = y
решение которой y ( x ) дает равномерное на отрезке 0 ≤ x ≤ H приближение для решения
задачи (2).
Если же малый параметр входит в уравнение как множитель при производной (старшей
производной), например
dy
μ = f ( y, x, μ )
,
(3)
dx
0
y (0, μ ) = y
то вырожденной уравнение f ( y, x, 0) = 0 уже не будет дифференциальным, и его решение
y ( x ) , вообще говоря, не удовлетворяет начальному условию, т.е. не дает равномерного на всем
отрезке 0 ≤ x ≤ H приближения для решения задачи (3).
Пример.
Рассмотрим задачу
dy
= −y
,
dx
y(0) = 1
μ
−x
решением которой является функция y ( x, μ ) = e μ . Если же положить μ = 0 , то получим
вырожденное уравнение f ( x, y , 0) ≡ − y = 0 , решение которого y ( x ) ≡ 0 не близко к точному
−x
решению y ( x, μ ) = e μ в окрестности точки x = 0 . Характерной особенностью подобных задач
является наличие пограничного слоя, т.е. области вблизи начальной (или внутренней) точки,
где происходит очень резкое изменение решения (см. рис. 1).
§ 2.
Регулярно возмущенная задача
10.
Асимптотическое приближение решения по малому параметру.
Рассмотрим задачу Коши
dy
= f ( y, x, μ ), 0 < x ≤ H , 0 < μ ≤ μ0
,
(4)
dx
0
y (0, μ ) = y ( μ )
Полагая μ = 0 , получим задачу
dy
= f ( y, x, 0 )
,
(5)
dx
0
y (0) = y
решение которой y ( x ) , как было отмечено выше, дает равномерное на отрезке 0 ≤ x ≤ H
приближение решения задачи (4), т.е. y ( x, μ ) − y ( x ) = α ( μ ) , где α ( μ ) → 0 при μ → 0 .
Чтобы уточнить полученное приближение, будем искать решение задачи (4) в виде ряда
по степеням малого параметра μ
(6)
y ( x, μ ) = y0 ( x ) + μ y1 ( x ) + μ 2 y2 ( x ) + ... .
Подставим это разложение в (4) и представим правую часть уравнения (4) и начальное
условие также в виде рядов по степеням μ :
dy0
dy
+ μ 1 + ... = f ( y0 ( x) + μ y1 ( x) + ..., x, μ ) ≡ f ( y0 , x, 0) + μ ⎡⎣ f y ( y0 , x, 0) ⋅ y1 ( x) + f μ ( y0 , x, 0) ⎤⎦ + ...
.
dx
dx
0
0
1
y ( μ ) = y + μ y + ...
Приравнивая теперь члены при одинаковых степенях параметра μ в правых и левых частях
уравнения и начального условия в (4), получим последовательность задач для определения
функций yi ( x) в разложении (6).
⎧ dy0
= f ( y0 , x, 0)
⎪
μ : →
1.
⎨ dx
⎪ y (0) = y 0
⎩ 0
Эта задача совпадает с (5). Потребуем, чтобы ее решение y0 ( x) = y ( x) существовало на
отрезке 0 ≤ x ≤ H и было единственным. Далее,
⎧ dy1
= f y ( y0 ( x), x, 0) ⋅ y1 + f μ ( y0 ( x), x, 0)
⎪
1
2.
μ : →
⎨ dx
⎪⎩ y1 (0) = 0
0
Задача для y1 ( x) является линейной и ее решение может быть получено в квадратурах,
например, методом вариации постоянной. Аналогично находятся следующие члены ряда (6),
причем задачи для yi ( x), i = 2,3,... также будут линейными. Справедлива следующая
Теорема 1. Пусть:
1) в некоторой области D = {| y |< b, 0 ≤ x ≤ H , 0 ≤ μ ≤ μ 0 } пространства переменных
является непрерывной вместе со всеми частными
( y, x, μ ) функция f ( y, x, μ )
производными до n + 1 - го порядка;
2) вырожденная задача (5) имеет на отрезке 0 ≤ x ≤ H единственное решение y0 ( x) .
Тогда при достаточно малых μ ( 0 < μ ≤ μ1 ≤ μ0 ) на сегменте 0 ≤ x ≤ H существует
единственное решение y = y ( x, μ ) задачи (4), причем имеет место оценка
y ( x, μ ) − Yn ( x, μ ) ≤ C μ n +1 ,
где C > 0 - некоторая постоянная, не зависящая от параметра μ , а Yn ( x, μ ) - частичная сумма
ряда (6).
Доказательство этой теоремы мы не приводим. Его можно найти, например, в книге
А.Б.Васильевой и
В.Ф.Бутузова
“Асимптотические разложения решений сингулярно
возмущенных уравнений”. Далее проиллюстрируем результат на конкретных примерах.
Пример 1.
Рассмотрим задачу Коши
dz
= 1 + μ z ≡ F ( x, z , μ )
dx
z (0, μ ) = 1 + 2 μ ≡ h( x, μ )
Точным решением ее является
x>0
.
1
z ( x, μ ) = (1 + 2μ ) ⋅ e μ x + (e μ x − 1) .
μ
Будем строить решение в виде ряда по параметру μ : z = z0 ( x ) + μ z1 ( x) + μ 2 z2 ( x ) + ... .
Подставив этот ряд в правую часть уравнения и в начальное условие, разложим функции
F ( x, z , μ ) и ϕ ( x, μ ) в ряды Маклорена по степеням параметра μ :
F ( x, z0 ( x ) + μ z1 ( x ) + μ 2 z2 ( x ) + ..., μ ) ≡ 1 + μ ⋅ ( z0 ( x ) + μ z1 ( x) + μ 2 z2 ( x ) + ...) = 1 + μ z0 ( x ) + μ 2 z1 ( x ) + ... ,
h ( x, μ ) = 1 + 2 μ .
Приравнивая теперь коэффициенты при степенях параметра в правой левой частях
уравнения и начального условия, получим последовательность задач:
⎧ dz0
=1
⎪
0
μ : →
z0 ( x ) = 1 + x
⇒
⎨ dx
⎪⎩ z0 (0) = 1
⎧ dz1
= z0 ( x ) = 1 + x
x2
⎪
μ : →
z
x
x
(
)
2
⇒
=
+
+
dx
⎨
1
2
⎪⎩ z1 (0) = 2
⎧ dz0
x2
z
x
x
=
≡
+
+
(
)
2
x 2 x3
⎪
1
z
x
x
(
)
2
μ2 : →
⇒
=
+
+
и т. д.
2
⎨ dx
2
2
6
⎪ z (0) = 0
⎩ 0
Таким образом, решение исследуемой задачи (первые 3 члена ряда по степеням
параметра μ ) имеет вид
1
⎛
⎛
x2 ⎞
x 2 x3 ⎞
z ( x, μ ) = 1 + x + μ ⋅ ⎜ 2 + x + ⎟ + μ 2 ⋅ ⎜ 2 x + + ⎟ + ... ,
2⎠
2 6⎠
⎝
⎝
что, как легко видеть, совпадает разложением в ряд Маклорена точного решения ( x > 0 фиксировано):
⎛ x2
⎞
μ x 2 μ 2 x3
2
+
+ o( μ 2 ) =
z ( x, μ ) = (1 + 2μ ) ⋅ e + (e − 1) = 1 + μ ⋅ (2 + x) + μ ⋅ ⎜ + 2 x ⎟ + o( μ ) + x +
μ
2
6
⎝ 2
⎠
⎛
⎛
x2 ⎞
x 2 x3 ⎞
.
= 1 + x + μ ⋅ ⎜ 2 + x + ⎟ + μ 2 ⋅ ⎜ 2 x + + ⎟ + o( μ 2 )
2⎠
2 6⎠
⎝
⎝
μx
Замечание.
1
μx
2
Если рассматривать задачу не на конечном отрезке
асимптотически большом (порядка
1
μ
0 ≤ x ≤ H , а на
), или бесконечном промежутке, то предельный переход
lim y ( x, μ ) = y0 ( x) уже может не быть равномерным по x . В этом можно убедиться в
μ →+0
разобранных ниже примерах.
Пример 2.
Рассмотрим задачу Коши
dy
= 1+ μ y
dx
y (0, μ ) = −1 + 2 μ
0< x≤H
где μ > 0 - малый параметр. Ее точное решение
,
-
y ( x , μ ) = ( −1 + 2 μ ) ⋅ e μ x +
(e
μ
1
μx
− 1) .
Соответствующая невозмущенная (т.е. при μ = 0 ) задача имеет вид
dy
=1
0< x≤ H
,
dx
y (0) = −1
а ее решение есть
y ( x) = x − 1 .
Легко видеть, что имеет место равномерный на отрезке 0 ≤ x ≤ H предельный переход
1
⎡
⎤
lim y ( x, μ ) ≡ lim ⎢( −1 + 2μ ) ⋅ e μ x + ( e μ x − 1) ⎥ = −1 + x ≡ y ( x) ,
μ →+0
μ →+0
μ
⎣
⎦
что соответствует результату, сформулированному в теореме 1. Однако, если H ∼
1
μ
, т.е. на
асимптотически большом (или бесконечном промежутке) это неверно.
Пример 3.
Рассмотрим задачу Коши
y′′ + y = 0
0< x≤ H
.
y (0) = 0,
y′(0) = 1
Ее точное решение - y ( x ) = sin x .
Внесем в уравнение малое регулярное возмущение ( μ > 0 - малый параметр)
y′′ + y + (2μ + μ 2 ) y = 0
0< x≤ H
(7)
y (0, μ ) = 0,
y′(0, μ ) = 1
и будем строить приближенное решение задачи Коши (7) на отрезке 0 ≤ x ≤ H в виде ряда
y ( x, μ ) = y0 ( x) + μ y1 ( x ) + μ 2 y2 ( x ) + ... .
Подставляя записанный ряд в уравнение и начальное условие, и приравнивая
коэффициенты при степенях μ , получим последовательность задач для определения членов
ряда:
⎧ y0′′ + y0 = 0
μ0 : →
y0 ( x) = sin x
⇒
⎨
⎩ y0 (0) = 0, y0′ (0) = 1
μ1 :
→
⎧ y1′′ + y1 + 2 y0 ≡ y1′′ + y1 + 2sin x = 0
⎨
⎩ y1 (0) = 0, y1′ (0) = 0
⇒
y1 ( x) = − sin x + x cos x
⎧ y2′′ + y2 + 2 y1 + y0 = 0
μ : →
⎨
⎩ y2 (0) = 0, y2′ (0) = 0
……………………..…
Легко видеть, что функция
⇒
2
x2
y2 ( x) = sin x − x cos x − sin x ,
2
y ( x, μ ) = y0 ( x) + μ y1 ( x) + μ 2 y2 ( x) = sin x + μ (− sin x + x cos x) + μ 2 (sin x − x cos x −
x2
sin x)
2
удовлетворяет уравнению и начальным условиям с точностью o( μ 2 ) .
sin(1 + μ ) x
Точное решение задачи (7) есть y ( x, μ ) =
. Убедитесь сами, что первые три
1+ μ
члена асимптотического разложения указанной функции по малому параметру μ совпадают с
полученным выше приближенным решением, т.е. частичная сумма построенного ряда дает
равномерное на конечном отрезке 0 ≤ x ≤ H приближение для точного решения.
Замечание.
В рассмотренном примере 3, как точное решение возмущенного уравнения, так
и решение вырожденного уравнения являются периодическими функциями (периоды –
соответственно
2π
μ +1
и
2π
–
асимптотически
близки).
Однако
полученное
нами
асимптотическое приближение содержит малые непериодические слагаемые вида μ x cos x и
μ 2 x 2 sin x , т.е. уже не является периодической функцией! Это означает, что рассмотренный
способ построения асимптотического ряда дает равномерное приближение для решения
начальной задачи лишь на конечном отрезке 0 ≤ x ≤ H , но не может быть использован для
нахождения приближения периодического решения.
В случае периодической задачи нужно использовать другие подходы, например, метод
усреднения Крылова-Боголюбова, с которым можно ознакомиться в книге Н.Н.Боголюбова и
Ю.А.Митропольского “Асимптотические методы в теории нелинейных колебаний”.
§ 2.
Сингулярные возмущения
10.
Теорема Тихонова.
Предельный переход
lim y ( x, μ ) = y0 ( x) ,
μ →+0
о котором говорится в теореме 1, имеет
место на конечном отрезке 0 ≤ x ≤ H , где H - некоторая постоянная, причем на указанном
множестве это предельный переход является равномерным относительно x ∈ [0, H ] . Таким
образом, в случае регулярного возмущения решение вырожденного уравнения дает
равномерное на отрезке приближение для точного решения. Однако, в случае сингулярного
возмущении это не так и, более того, решение вырожденного уравнения может быть вообще не
близко к точному решению.
Рассмотрим систему уравнений, содержащую малый параметр при старшей
производной. Требуется найти функции z ( x, μ ) и y ( x, μ ) - решение следующей задачи Коши:
⎧ dz
⎪⎪ μ dx = F ( z, y, x)
⎨
.
(8)
⎪ dy = f ( z, y, x)
⎪⎩ dx
z (0, μ ) = z 0 ,
y (0, μ ) = y 0
где μ > 0 - малый параметр.
dz 1
= F ( z, y, x) не является
В данном случае правая часть первого уравнения
dx μ
регулярно возмущенной (см. определение 1). Полагая формально μ = 0 в задаче (8), получим
невозмущенную (вырожденную) систему
⎧ 0 = F ( z , y, x )
⎪
,
(9)
⎨ dy
(
)
=
f
z
,
y
,
x
⎪⎩ dx
где первое уравнение системы – алгебраическое (а не дифференциальное) относительно
Предположим, что оно имеет действительные решения - функции
переменной z .
zi = ϕi ( y, x), i = 1, 2,..., p , - причем все корни изолированы, т.е. для каждого из них существует
окрестность z − ϕi ( y, x) ≤ d , в которой нет других решений этого уравнения.
Пусть z = ϕ ( y , x ) - один из корней первого уравнения системы (9).
y ( x) ≡ y ( x, 0) , тогда получим следующую вырожденную задачу
dy
= f (ϕ ( y , x), y , x)
dx
y (0) = y 0
Теорема 2 (теорема А.Н.Тихонова).
Пусть:
1) функции F ( z, y, x), f ( z, y, x), F ′ z, F ′ y, f ′ z, f ′ y -
Обозначим
(10)
непрерывны в некоторой области трех
переменных ( z, y, x) : G = D × Z , ( y, x) ∈ D, z ∈ Z ;
2) функции ϕ ( y, x), ϕ ′ y ∈ C ( D) ;
3) существует решение задачи (10) y = y ( x) на сегменте 0 ≤ x ≤ H ;
∂F
< 0;
4) корень ϕ ( y, x) является устойчивым в области D , т.е.
∂z z =ϕ ( y , x )
5) начальное значение z 0 принадлежит области влияния устойчивого корня ϕ ( y 0 , x)
уравнения F ( z 0 , y 0 , 0) = 0 , т.е. если ϕ1 ( y, x) и ϕ 2 ( y, x) – два ближайших к ϕ ( y, x) корня
соответственно снизу и сверху, то необходимо, чтобы начальное значение z 0 лежало в
областью влияния (или областью
интервале (ϕ1 ( y 0 , x) ; ϕ 2 ( y 0 , x) ) , называемой
притяжения) корня ϕ ( y, x) .
Тогда:
1) существует решение z ( x, μ ) , y ( x, μ ) задачи (8), определенное на сегменте 0 ≤ x ≤ H ;
2) имеет место предельный переход
lim y ( x, μ ) = y ( x),
0≤ x≤ H
μ →+0
,
lim z ( x, μ ) = ϕ ( y ( x), x),
0< x≤ H
μ →+0
где y ( x ) - решение вырожденной задачи (10).
сформулированной теоремы можно найти, например, в книге
Доказательство
А.Б.Васильевой и
В.Ф.Бутузова
“Асимптотические разложения решений сингулярно
возмущенных уравнений”.
Замечание. Предельный переход для функции y ( x, μ ) является равномерным относительно
x на отрезке 0 ≤ x ≤ H , в то время как для функции z ( x, μ ) - неравномерным. Можно доказать,
что равномерный предельный переход в формуле для z ( x, μ ) имеет место на отрезке
x0 ≤ x ≤ H , где x0 > 0 .
Пример 1.
Рассмотрим задачу Коши
dz
μ = 2− z
,
dx
z (0, μ ) = 1
(11)
решение которой легко выписывается:
−
x
(12)
z ( x, μ ) = 2 − e μ .
Функция в правой части уравнения (8) есть F ( z , μ ) = 2 − z . Полагая в (11) μ = 0 ,
которое имеет единственное
получим вырожденное уравнение
F ( z , 0) ≡ 2 − z = 0 ,
∂F
= − 1 < 0 , то
(следовательно, изолированное) решение z ( x ) = ϕ ( x ) ≡ 2 . Так как
∂z z =ϕ ( x ) ≡ 2
корень вырожденного уравнения является устойчивым.
Заметим, что других корней у уравнения (11) нет, поэтому областью влияния
устойчивого корня вырожденного уравнения z ( x ) = ϕ ( x ) ≡ 2 является вся плоскость ( x, z ) , и
начальное значение z (0, μ ) = 1 принадлежит этой области влияния. Структуру области влияния
∂F
можно изучить и непосредственно: так как условие
= − 1 < 0 выполняется на всей
∂z z =ϕ ( x ) ≡ 2
dz
плоскости ( x, z ) , то при z > 2 имеет место F ( z , 0 ) < 0 ⇒
< 0 , а при z < 2 dx
dz
F ( z, 0 ) > 0 ⇒
> 0 , т.е. при любом начальном значении z (0, μ ) решение задачи (11)
dx
z ( x, μ ) будет приближаться к устойчивому корню вырожденного уравнения z ( x ) = ϕ ( x ) ≡ 2 .
Суммируя сказанное выше, на основании теоремы Тихонова можно утверждать, что
lim z ( x, μ ) = ϕ ( x) ≡ 2,
0< x≤ H .
имеет место предельный переход
μ →+0
В справедливости последнего утверждения при любом H > 0 можно легко убедиться
непосредственно, вычислив предел точного решения (12):
lim z ( x, μ ) = lim (2 − e
μ →+0
−
x
μ
μ →+0
) = 2,
x > 0.
Кроме того, на множестве x ≥ x0 > 0 имеет место
lim sup z ( x, μ ) − ϕ ( x) = lim sup (2 − e
μ →+0 x ≥ x > 0
0
μ →+0 x ≥ x > 0
0
−
x
μ
) − 2 = lim sup e
μ →+0 x ≥ x > 0
0
−
x
μ
= lim e
μ →+0
−
x0
μ
= 0,
т.е. предельный переход является равномерным относительно x на указанном множестве.
Замечание (о геометрическом смысле термина “сингулярное возмущение”). Так как параметр
μ считается достаточно малым, то левую часть уравнения (11) можно рассматривать как
некоторое “малое” возмущение к вырожденной задаче F ( z , 0) ≡ 2 − z = 0 , решение которой
получить существенно проще, чем решение полной задачи (11). Возникает вопрос: будет ли это
решение близко к точному решению (11)? Как установлено выше, при выполнении условий
теоремы А.Н.Тихонова (и, в частности, для задачи (11)), искомая близость имеет место, если
исключить некоторую окрестность начальной точки. Таким образом, отличие точного решения
от решения вырожденного уравнения носит сингулярный характер и проявляется лишь в
окрестности одной точки. В случае же регулярного возмущения, решения задач при μ = 0
(невозмущенной) и при малых μ > 0 (возмущенной) равномерно близки на сегменте,
включающем начальную точку.
Пример 2.
Рассмотрим задачу Коши
dz
μ = z 2 − z ≡ F ( z, μ )
.
dx
z (0, μ ) = h ≠ 0
Выясним, для каких начальных значениях z(0, μ ) = h точное решение z ( x, μ ) близко к
решению вырожденного уравнения F ( z , 0) = 0 при x > 0 .
Соответствующее вырожденное уравнение F ( z, 0) ≡ z 2 − z = 0 имеет два изолированных
корня: устойчивый
ϕ1 ( x) ≡ 0 , так как
неустойчивый ϕ2 ( x) ≡ 1 , так как
∂F
∂z
z =ϕ1 ( x ) ≡ 0
∂F
∂z
z =ϕ 2 ( x ) ≡1
= ( 2 z − 1) z =0 = −1 < 0 , и
= ( 2 z − 1) z =1 = 1 > 0 .
Заметим, что областью влияния устойчивого корня ϕ1 ( x) ≡ 0 являются полуплоскость
z < 0 и полоса 0 < z < 1 . Поэтому для начальных значений h < 0 и 0 < h < 1 в соответствии с
теоремой А.Н.Тихонова при каждом 0 < x ≤ H имеет место предельный переход
lim z ( x, μ ) = ϕ1 ( x) ≡ 0 . Если же h > 1 (начальное значение вне области влияния корня ϕ1 ( x) ≡ 0 ),
μ →+0
то условия теоремы нарушены, и предельный переход, вообще говоря, невозможен.
Проиллюстрируем этот результат, выписав точное решение задачи Коши
he − x μ
z ( x, μ ) = − x μ
.
he
+1− h
Если h < 0 или 0 < h < 1 , то знаменатель дроби не обращается в нуль на полупрямой
x > 0 . Поэтому решение определено при всех x > 0 , и lim z ( x, μ ) = 0 . В случае z (0, μ ) = h > 1
μ →+0
знаменатель дроби обращается в нуль при x = x0 , где x0 - решение уравнения e − x μ = 1 −
1
h
1
< 1 ). Это означает, что решение исследуемой
h
задачи Коши z ( x, μ ) существует лишь на интервале 0 < x < x0 , а в точке x = x0 разрушается,
(оно разрешимо для всех h > 1 , так как 0 < 1 −
причем lim z ( x, μ ) = +∞ .
x → x0 − 0
20.
Асимптотическое разложение решений сингулярно возмущенных задач. Метод
пограничных функций.
Детальное рассмотрение этого вопроса выходит за рамки нашего курса. Его можно
найти, например, в книге А.Б.Васильевой и В.Ф.Бутузова “Асимптотические разложения
решений сингулярно возмущенных уравнений”. Здесь мы ограничимся лишь описанием
основных идей на конкретном примере.
Рассмотрим задачу Коши
dz
μ = 1 − z + μ ( z − 1) 2 ≡ F ( x, z, μ )
dx
z (0, μ ) = 2 + μ ≡ h( x, μ )
Точным решением ее является
x>0
.
( μ + 1)e− x μ
z ( x, μ ) = 1 +
.
1 + μ ( μ + 1) ( e− x μ − 1)
Заметим, что имеет место предельный переход
lim z ( x, μ ) = ϕ0 ( x) ≡ 1
μ →+0
при каждом
фиксированном x > 0 ,
где ϕ0 ( x) ≡ 1 - устойчивый корень вырожденного
уравнения
F ( x, z , 0) = 0 , что соответствует результату, сформулированному в теореме А.Н. Тихонова.
Однако если x > 0 является асимптотически малым (т.е. 0 < x < x0 , где x0 ∼ μ ), то величина
e − x μ конечна, и отличие решения z ( x, μ ) от корня ϕ0 ( x) ≡ 1 вырожденного уравнения не мало.
Поэтому в областях 0 < x < x0 ∼ μ и x x0 разложения в точного решения z ( x, μ ) в ряд по
степеням малого параметра μ > 0 будут различны.
Пусть x > 0 фиксировано и не является асимптотически малым (т.е. x x0 ). Тогда при
μ → +0 имеет место e − x μ = o( μ n ) , где n - любое натуральное число, и для точного решения
получаем “регулярное разложение” (регулярный ряд) z ( x, μ ) = 1 + o( μ n ) , или с точностью до
членов первого порядка z ( x, μ ) = 1 + o( μ ) .
Вблизи начальной точки, т.е. при 0 < x < x0 ∼ μ величина e − x μ ∼ 1 , поэтому разложение
в ряд точного решения будет содержать кроме регулярной части еще “пограничные функции”,
зависящие от “быстрой” переменной ρ =
x
μ
, которые убывают при x → +∞ . Действительно,
соответствующий ряд с точность до членов первого порядка по μ имеет вид:
z ( x, μ ) = 1 +
( μ + 1)e− x μ
= 1 + o( μ ) + e− ρ + μ ⋅ (2e − ρ − e −2 ρ ) + o( μ ) ≡ z ( x, μ ) + Π z ( ρ , μ ) .
1 + μ ( μ + 1) ( e− x μ − 1)
Возникает вопрос: можно ли получить асимптотическое разложение решения (т.е. члены
записанного выше ряда), не находя точного решения в явном виде, а решая, как и в случае
регулярного возмущения некоторую последовательность более простых задач? Оказывается,
что при определенных условиях это возможно. Представив решение в виде суммы двух рядов
по степеням малого параметра - регулярного z ( x, μ ) и пограничного Π z ( ρ , μ ) ,- подставляя эти
ряды в уравнение и начальное условие и приравнивая коэффициенты при степенях параметра
μ отдельно в регулярной части (зависящей от переменной x ) и погранслойной (зависящей от
“быстрой” переменной ρ =
x
μ
), получим последовательность задач для определения членов
разложения. Указанный метод носит название метода пограничных функций А.Б. Васильевой и
подробно описан в упомянутой выше книге А.Б.Васильевой и В.Ф.Бутузова “Асимптотические
разложения решений сингулярно возмущенных уравнений”.
Глава 8.
Уравнения в частных производных первого порядка.
Лекция 13
Общее уравнение в частных производных первого порядка имеет вид
⎛
∂z
∂z ⎞
,… ,
F ⎜ x1 , , xn , z ,
или F ( x , z, grad z ) = 0 .
⎟=0
∂x1
∂xn ⎠
⎝
Проблема существования и единственности решения в общем случае окончательно не
решена. Далее мы рассмотрим только линейные и квазилинейные уравнения 1–го порядка.
§1. Линейное однородное уравнение
Определение 1.
Линейным однородным уравнением в частных производных первого
порядка будем называть уравнение вида:
n
∂z
∂z
∂z
∂z
Xi ( x)
= X1 ( x )
+ X2 (x)
+ + Xn (x)
= 0 или
X ( x ) , grad z ( x ) = 0 ,
(1)
∑
∂xi
∂x1
∂x2
∂xn
i =1
(
x = ( x1 , x2 ,
где
Определение 2.
, xn ) ,
X ( x ) = ( X1 ( x ) , X 2 ( x ) ,
)
, X n ( x ))
Решением (1) называется функция z ( x ) = z ( x1 , x2 ,
, xn ) , обладающая
необходимыми частными производными и обращающая (1) в тождество, ( x1 , x2 ,..., xn ) ∈ D .
Далее будем считать, что коэффициенты
X i ( x1 ,
, xn ) , i = 1, 2,..., n в уравнении (1)
удовлетворяют следующим условиям:
1) X i ∈ C 1 ( D);
2)
n
∑ X ( x ) ≠ 0,
i =1
2
i
(У1)
∀x ∈ D.
Определение 3.
Характеристической системой,
система из n-1 уравнений
dxn
dx1
dx2
=
= =
X1 ( x ) X 2 ( x )
Xn ( x)
Определение 4.
соответствующей
(1)
называется
(2)
Характеристиками уравнения (1) называются решения системы (2).
Будем считать, что через каждую точку области D может проходить единственная
характеристика – интегральная кривая системы (2), и характеристики можно задать в
параметрической форме
⎧ x1 = x1 ( t )
dxn
dx1
dx2
⎪
(У2)
=
= =
= dt
⇒
⎨ …………
X1 ( x ) X 2 ( x )
Xn (x)
⎪ x = x (t )
n
⎩ n
Определение 5.
Первым
интегралом
(2)
принимающая постоянное значение, когда точка
называется
( x1, x2 ,
, xn )
функция
Ψ ( x1 , x2 ,
, xn ) ,
пробегает интегральную
кривую (2). Первым интегралом также называется само выражение Ψ ( x1 , x2 ,
, xn ) = C .
§2. Общее решение линейного уравнения в частных производных.
Теорема 1. Пусть выполнены условия (У1) и (У2).
Тогда
1)
любое решение однородного уравнения (1) является первым интегралом системы (2);
2)
любой первый интеграл (2) является решением (1).
Доказательство.
1)
Пусть функция z = Ψ ( x1 , x2 , , xn ) - решение уравнения (1), т.е.
∂Ψ
∂Ψ
+ + Xn
≡ 0 ∀( x1 , x2 , , xn ) ∈ D .
∂x1
∂xn
В силу (У2)
∂Ψ dx1 ∂Ψ dx2
∂Ψ dxn
d
+
+ +
≡0 ⇒
Ψ ( x1 ( t ) , x2 ( t ) ,
∂x1 dt ∂x2 dt
∂xn dt
dt
и Ψ ( x1 , x2 , , xn ) есть первый интеграл системы (2).
X1
2)
Пусть Ψ ( x1 , x2 ,
Ψ ( x1 (t ), x2 (t ),
xn ( t ) ) ≡ 0 ⇒ Ψ ( x1 , x2 ,
, xn ) = C
, xn ) - первый интеграл (2), т.е. при всех t выполнено тождество
, xn (t ) ) = C . Дифференцируя его по t , получим
∂Ψ dx1 ∂Ψ dx2
∂Ψ dxn
∂Ψ
∂Ψ
X1
+
+ +
=0 ⇒
+ + Xn
≡ 0.
∂x1 dt ∂x2 dt
∂xn dt
∂x1
∂xn
Указанное тождество выполняется вдоль характеристики. Так как в силу (У2) через каждую
точку D проходит характеристика, то последнее равенство выполняется тождественно в D, т.е.
функция z = Ψ ( x1 , x2 , , xn ) – решение уравнения (1).
Замечание. На каждой характеристике решение линейного уравнения (1) принимает
постоянное значение.
Теорема 2. Пусть известны n − 1 независимых первых интегралов системы (2)
Ψ1 ( x1 , , xn ) = C1 ,… , Ψ n −1 ( x1 , , xn ) = Cn −1 ,
причем
D ( Ψ1 , , Ψ n −1 )
≠ 0,
D( x1 , , xn −1 )
( x1 ,
, xn ) ∈ D .
, Ψ n −1 ) , где Φ - произвольная
Тогда общим решением уравнения (1) является z = Φ ( Ψ1,
дифференцируемая функция n − 1 аргументов. Другими словами, общее решение уравнения (1)
есть дифференцируемая функция n − 1 независимых первых интегралов системы (2).
Доказательство.
1)
Докажем, что функция z = Ψ ( x1 , x2 , , xn ) удовлетворяет уравнению (1). Подставив ее в
(1), получим:
n
∑ Xi
i =1
∂Φ
=
∂xi
n
n −1
∑ Xi ∑
i =1
j =1
∂Φ ∂Ψ j
=
∂Ψ j ∂xi
∂Φ
∑
j =1 ∂Ψ j
n −1
∂Ψ j
n
∑X
i =1
i
∂xi
.
≡ 0 ∀Ψ j (T .1)
Следовательно, z = Ψ ( x1 , x2 ,
, xn ) – решение (1).
2)
Покажем, что любое решение уравнения (1) можно представить
z = Ψ ( x1, x2 , , xn ) . Подставим Ψ , Ψ j , j = 1, 2,..., n − 1 в (1). Получим
в
виде
∂Ψ
+
∂x1
∂Ψ
=0
∂xn
⎫
⎪
⎪
∂Ψ1
∂Ψ1
⎪
+ + Xn
=0
X1
⎪
∂x1
∂xn
⎬
⎪
⎪
∂Ψ n −1
∂Ψ n −1
⎪
+ + Xn
=0 ⎪
X1
∂x1
∂xn
⎭
X1
+ Xn
– однородная системы линейных алгебраических уравнений относительно функций X 1 ,..., X n .
Так как в силу условия
(У1) в области D выполнено
n
∑X
i =1
2
i
≠ 0 , то указанная
однородная
СЛАУ
имеет
ненулевое
решение,
следовательно
определитель
D ( Ψ , Ψ1 , , Ψ n −1 )
Δ=
≡ 0 в области D . Это означает, что функции Ψ, Ψ1 , , Ψ n−1 зависимы,
D( x1 , x2 , , xn )
т.е. существует функция F такая, что F ( Ψ, Ψ1 ,
, Ψ n −1 ) = 0 . Но по условию теоремы якобиан
D ( Ψ1 , , Ψ n −1 )
≠ 0 , поэтому в силу известных результатов математического анализа последнее
D( x1 , , xn −1 )
уравнение можно разрешить относительно Ψ:
z = Ψ = Φ ( Ψ1 ,
, Ψ n −1 ) , где Ф – некоторая
дифференцируемая функция. Таким образом, функция z = Φ ( Ψ1,
решением (1)
, Ψ n −1 ) является общим
.
§3. Задача Коши
10.
Двумерный случай.
Зададим некоторую кривую x = x( s ), y = y ( s ) и поставим задачу построения решения
уравнения (1) с дополнительным условием (задача Коши):
∂z
∂z
X 1 ( x, y ) + X 2 ( x, y ) = 0
∂x
∂y
.
z x = x( s ) = ϕ ( s )
y = y( s )
Геометрически это означает, что нужно получить уравнение поверхности z = z ( x, y ) ,
удовлетворяющей (1) и проходящей через кривую x = x( s ), y = y ( s ) .
Найдем первый интеграл
Ψ1 ( x, y ) = C1 ⇒ Ψ1 ( x( s), y ( s) ) = C1 .
Из полученного соотношения выразим параметр s = w1 ( c1 ) и подставим в начальное условие:
z = ϕ ⎡⎣ w1 ( c1 ) ⎤⎦
c1 =Ψ1 ( x , y )
.
Если кривая, на которой задается начальная функция, гладкая и не совпадает с
характеристикой, то каждая характеристика уравнения пересекают эту кривую лишь в одной
точке. Так как характеристики заполняют всю рассматриваемую область, то задача Коши имеет
единственное решение в этой области: вдоль каждой из характеристик переносится то значение
ϕ ( s ) , которое задано на начальной кривой x = x( s ), y = y ( s ) (вдоль характеристики решение
принимает постоянное значение).
Если начальная кривая совпадает с характеристикой, то искомого решения может не
существовать вовсе (если ϕ ( s ) ≠ const ), либо оно может быть не единственным (в случае
ϕ ( s ) = const ).
20.
Постановка задачи и схема решения в общем случае.
Рассмотрим следующую задачу Коши
n
∂z
Xi ( x)
= 0 ( X n ≠ 0, x ∈ D )
∑
∂xi
i =1
z x = x ( s ,…, s
i
i
1
n−1
), i =1, n
= ϕ ( s1 , … , sn −1 )
Искомая функция задается на многообразии ко-размерности 1 (размерности n − 1 ) , т.е.
на гиперповерхности.
Опишем алгоритм построения решения указанной задачи Коши.
1)
Находим (n-1) независимых первых интегралов (2):
⎧Ψ1 ( x1 , , xn ) = C1 ,
⎪
⎨
⎪Ψ
⎩ n −1 ( x1 , , xn ) = Cn −1
2)
Подставляем в полученные выражения уравнение многообразия
xi = xi ( s1 ,…, sn −1 ) , i = 1, 2,..., n :
⎧Ψ1 ( x1 ( s1 , … , sn −1 ) , , xn ( s1 , … , sn −1 ) ) = C1 ,
⎪⎪
⎨
⎪
⎪⎩Ψ n −1 ( x1 ( s1 , … , sn −1 ) , , xn ( s1 , … , sn −1 ) ) = Cn −1
3)
4)
Исключаем s1 ,
, sn −1 , что возможно, т.к. якобиан отличен от нуля:
s1 = w1 ( C1 , , Cn −1 ) , , sn −1 = wn −1 ( C1, , Cn −1 )
Ищем решение в виде функции, задающей начальное условие:
z = ϕ ( w1 ( C1 , , Cn −1 ) , , wn −1 ( C1 , , Cn −1 ) ) ,
Ci = Ψ i ( x1 , , xn ) , i = 1, n − 1
Полученная функция и есть решение рассматриваемой задачи Коши. Убедимся в этом.
Действительно,
1) Это (в силу теоремы.2) - решение уравнения (1), т.к. частный случай
z = Φ ( Ψ1, , Ψ n −1 ) .
2) Оно удовлетворяет начальному условию
z x = x ( s ,…, s ), i =1,n = ϕ ( s1 ,…, sn −1 )
i
i
Замечание.
1
n−1
Если начальная кривая z x = x ( s ,…, s
i
i
1
n−1
), i =1, n
= ϕ ( s1 ,…, sn −1 ) является характеристикой,
то решение задачи Коши либо не однозначно, либо не существует.
30 .
Примеры.
∂z
∂z
−x =0.
∂x
∂y
Найдем первый интеграл системы для характеристик
dx dy
=
⇒ ydy + xdx = 0 ⇒ d ( x 2 + y 2 ) = 0 ⇒ Ψ1 ( x, y ) = x 2 + y 2 = C .
y −x
Таким образом, характеристиками являются окружности, и общее решение уравнения имеет
вид
z = Φ ( C ) C = x2 + y 2 = Φ ( x 2 + y 2 ) .
Пример 1. Рассмотрим линейное уравнение y
Пример 2.
т.е.
Рассмотрим теперь задачу Коши
∂z
∂z
y −x =0
z x =1, y = s = 1 + s 2 = ϕ ( s ) ,
∂x
∂y
требуется
найти
интегральную
поверхность,
проходящую
через
кривую
z x =1, y = s = 1 + s = ϕ ( s ) (гиперболу).
2
Подставим x = 1, y = s
Ψ = x2 + y 2
x =1, y = s
=C
в полученный в примере 1 интеграл x 2 + y 2 = C и найдем
⇒ 1+ s2 = C ⇒
s2 = C −1 ⇒
z = 1+ C −1 = C
C = x2 + y 2
= x2 + y2 .
Таким образом, решение z = x 2 + y 2 (верхняя часть конуса) задачи Коши существует и
единственно.
§4.
Квазилинейное уравнение.
10.
Постановка задачи.
Определение.
Уравнение в частных производных первого порядка
∂z
∂z
(1)
X 1 ( x1 , x2 , , xn , z )
+ + X n ( x1 , x2 , , xn , z )
= X ( x1 , x2 , , xn , z )
∂x1
∂xn
называется квазилинейным.
Будем искать решение z = Ψ ( x1 ,..., xn ) уравнения (1) в неявном виде V ( x1 ,..., xn , z ) = 0 .
Предположим, что последнее уравнение можно разрешить относительно z , т.е. существует
функция z = Ψ ( x1 ,..., xn ) . Пусть, кроме того ∂V
≠ 0 в области D , тогда существуют
∂z z =Ψ ( x1 , , xn )
∂V
∂x
∂z
=− i .
производные
∂V
∂xi
∂z
Подставляя в (1) и умножая на ∂V , получим линейное однородное уравнение для
∂z
функции V ( x1 ,..., xn , z ) :
X 1 ( x1 , x2 ,
, xn , z )
∂V
+
∂x1
+ X n ( x1 , x2 ,
, xn , z )
∂V
+ X ( x1 , x2 ,
∂xn
, xn , z )
∂V
∂z
=0
(2)
z =Ψ ( x1 , , xn )
20 .
Алгоритм построения решения квазилинейного уравнения..
1)
Квазилинейному неоднородному уравнению (1) сопоставляется линейное однородное
уравнение (2) относительно функции V ( x1 , x2 ,..., xn , z ) :
∂V
∂V
∂V
+ + X n ( x1 , , xn , z )
+ X ( x1 , , xn , z )
= 0.
∂x1
∂xn
∂z
Для полученного уравнения (2) запишем систему уравнений характеристик:
dx
dx1
dz
= = n =
X1
Xn X
X 1 ( x1 ,
, xn , z )
Ее решения - интегральные кривые в пространстве ( x1 ,
(3)
, xn , z ) .
2)
В соответствии с изложенным выше, ищем общее решение линейного однородного
уравнения (2) в виде функции от n первых интегралов системы (3):
Ψ1 ( x1 , , xn , z ) = C1
Ψ n ( x1 ,
, xn , z ) = Cn
в виде V = Φ ( Ψ1 ,
, Ψn ) .
Формула V = Φ ( Ψ1 ( x1 ,
, xn , z ),
поставленной задачи в неявном виде.
3)
, Ψ n ( x1,
, xn , z ) ) = 0 дает решение z = Ψ ( x1 ,..., xn )
Замечание 1.
Решения, удовлетворяющие лишь системе (2) называются специальными
и могут не содержаться в полученной формуле.
Замечание 2.
Схема решения задачи Коши аналогична схеме для линейной задачи.
Глава 9.
Численные методы.
Лекция 14
§ 1.
Разностный
метод
дифференциальных уравнений.
Эйлера
решения
задачи
Коши
для
10.
Дифференциальная и разностная задачи Эйлера.
Определение 1.
Дифференциальной задачей Эйлера называется начальная задача
⎧ dy
⎫
⎪ − f ( x, y ) ⎪ ⎧ 0 ⎫
(1)
Ly = ⎨ dx
⎬ = ⎨ 0⎬ =ϕ
⎪⎩ y ( x0 ) ⎪⎭ ⎩ y ⎭
Основные определения и обозначения, используемые в дальнейшем:
( x0 , x1 , ", xN ) – сетка;
xn (n = 0, N ) – узлы сетки;
xn +1 − xn = HN = h – шаг сетки;
[ y ]h = { y ( x0 ), y ( x1 ), ", y ( xN )} – решение дифференциальной задачи Эйлера (1) в узлах сетки;
y ( h ) = ( y0 , y1 , ", y N ) – сеточные функции, определенные на сетке.
Заменим производную в узле xn сетки приближенным разностным отношением.
y − yn yn +1 − yn
y′( xn ) ≈ n +1
=
, ( n = 0,1, ", N − 1)
xn +1 − xn
h
Тогда дифференциальная задача (1) заменяется разностной задачей Эйлера:
⎧ yn +1 − yn
⎫
− f ( xn , yn ) ⎪ ⎧ 0 ⎫
( h) ⎪
(h)
(2)
Lh y = ⎨
h
⎬ = ⎨ 0⎬ =ϕ
y
⎩
⎭
⎪⎩
⎪⎭
y0
Определение 2.
Разностная задача (2) называется разностной схемой Эйлера.
⎧⎪ yn +1 = yn + hf ( xn , yn ),
то это - явная разностная схема.
Так как
⎨
0
⎪⎩ y0 = y
Предполагается, что решения задач (1) и (2) существуют и единственны.
20 .
Понятие сходимости сеточных функций.
Определение 3.
Равномерной (чебышевской) нормой сеточных функций называется
( h)
y
= max | yn |
0≤ n≤ N
Определение 4 (сходимости).
Решение y(h) разностной задачи (2) сходится при h → 0 к
решению дифференциальной задачи (1), если
[ y ]h − y (
h)
h →0
→0
Если кроме того выполняется неравенство
[ y ]h − y ( h ) ≤ Ch k , C > 0, k > 0,
то говорят, что имеет место сходимость порядка k.
30. Понятие аппроксимации разностной схемы.
Точное решение задачи (1) на сетке [y]h, вообще говоря, не совпадает с решением y(h)
разностной задачи (2).
Поэтому при подстановке [y]h в (2) возникает невязка δϕ(h):
[ y ]h → (2) : Lh [ y ]h = ϕ (
h)
+ δϕ ( ) ⇐⇒
h
⇐⇒ δϕ ( h ) = Lh [ y ]h − ϕ ( h )
Определение 5 (аппроксимации разностной задачей дифференциальной задачи).
Говорят, что разностная задача (2) аппроксимирует дифференциальную задачу (1), если норма
невязки стремится к нулю при h → 0 :
h→0
ϕ (h) → 0
Если, кроме того, справедливо неравенство для нормы невязки:
ϕ ( h ) ≤ Ch k , C , k − const > 0,
то говорят, что имеет место аппроксимация порядка k.
Утверждение 1.
Схема Эйлера (2) имеет первый порядок аппроксимации.
Доказательство.
Пусть ∀x ∈ [ x0 , x0 + H ] :
| y ′′( x ) |≤ 2C , C − const
Вычислим и оценим невязку, применив формулу Тейлора
⎧ y ( xn + h) − y ( xn )
⎫
− f ( xn , y ( xn )) ⎪ ⎧⎪ 0 ⎫⎪
(h)
( h) ⎪
δϕ = Lh [ y ]h − ϕ = ⎨
h
⎬ − ⎨⎪ 0 ⎬⎪ =
⎪⎩
⎪⎭ ⎩ y ⎭
y ( x0 )
2
⎧ hy′( xn ) + h2 y′′( x∗ )
⎫
− f ( xn , y ( xn )) ⎪ ⎧⎪ 0 ⎫⎪
⎪
=⎨
h
⎬ − ⎨⎪ 0 ⎬⎪ =
⎪
⎪ ⎩y ⎭
y ( x0 )
⎩
⎭
⎧ 1 ′′ ∗ ⎫
⎪ y ( x )h ⎪
( h)
= ⎨2
< Ch1
⎬ ⇒ δϕ
⎪⎩
⎪⎭ 0
| y ′′ ( x∗ )|≤ 2 C
следовательно, порядок аппроксимации равен 1.
40. Понятие устойчивости разностной схемы.
Рассмотрим две разностные схемы
h
h
Lh y ( ) = ϕ ( ) (3)
Lh z ( h ) = ϕ ( h ) + ε ( h )
(4)
ε
ε
Вторую разностную схему (4) называют возмущенной возмущением (h). (в (h). входят
возмущения и правых частей уравнений (3) и начальных условий.) Предполагаем, что решения
задач (3) и (4) существуют и единственны.
Определение 6.
Разностная схема (3) называется устойчивой, если
∃ h0 : ∀ h ≤ h0 :
z ( h ) − y ( h ) ≤ C1 ε ( h ) , C1 − const
Справедливо утверждение: из аппроксимации и устойчивости разностной схемы следует ее
сходимость.
Теорема 1. Пусть:
1) разностная схема (3) аппроксимирует дифференциальную задачу (1) с порядком k (с
коэффициентом C),
2) разностная схема (3) устойчива (с коэффициентом С1).
Тогда решение разностной задачи (3) сходится к решению дифференциальной задачи (1) с
порядком сходимости k, причем верна оценка
[ y ]h − y ( h ) ≤ CC1h k
Доказательство.
h
h
Lh y ( ) = ϕ ( )
⇒ Lh [ y ]h = ϕ ( h ) + δϕ ( h ) ,
δϕ ( h ) ≤ Ch k
В силу условия 2),
[ y ]h ≡ z ( h ) , δϕ ( h ) ≡ ε ( h ) ,
⇒ ∃ h0 : ∀h < h0 :
⇒ [ y ]h − y (
Замечание.
h)
z( ) − y(
≤ C1 δϕ (
h
h)
≤ C1 ε (
h)
≤ CC1 h
h)
k
Порядок сходимости устойчивой схемы совпадает с порядком аппроксимации.
Утверждение 2.
Схема Эйлера (2) устойчива.
Рассмотрим невозмущенную и возмущенную разностные схемы:
Доказательство.
⎧ yn +1 − yn
⎫
− f ( xn , yn ) ⎪ ⎧ 0 ⎫
( h) ⎪
Lh y = ⎨
h
⎬ = ⎨ 0 ⎬ ; (n = 0, N − 1)
y ⎭
⎪⎩
⎪⎭ ⎩N
y0
ϕ ( h)
⎫
zn +1 − zn
⎪
(
)
−
f
x
,
z
⎧ 0 ⎫ ⎧ε n ⎫
n
n ⎪⎪
⎬ =⎨
Lh z ( h ) =
h
⎬+ ⎨ ⎬
⎪
z 0 ⎭ ⎩ε 0 ⎭
⎩
⎪
N N
z0
⎭⎪
⎧
⎪
⎪⎪
⎨
⎪
⎪
⎩⎪
ϕ ( h)
ε ( h)
Обозначим wn=zn-yn
⎧
⎪
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎪⎩
zn
⎤ ⎫⎪
wn +1 − wn ⎡⎢
⎪
− f ( xn , yn + wn ) − f ( xn , yn ) ⎥ ⎪ ⎧ ⎫
h
⎢
⎥ ⎪⎪ ⎪ε n ⎪
wn :
⎣
⎦ ⎬⎪ = ⎨⎪ ε ⎬⎪
F ( wn )
w0
Пусть:
∂f
< K ⇒| F ( wn ) |≤ K | wn |
∂y
(по формуле Лагранжа конечных приращений)
⎪
⎪
⎪
⎪⎭
⎩ 0⎭
Оценим wn:
| wn +1 |≤| wn + hF ( wn ) + hε n |≤
≤| wn | + hK | wn | + h | ε n |=
=| wn | (1 + Kh) + h | ε n |
Следовательно,
| w1 |≤| w0 | (1 + Kh) + h | ε 0 |
| w2 |≤| w1 | (1 + Kh) + h | ε1 |≤
≤| w0 | (1 + Kh) 2 + h(1 + Kh) | ε 0 | + h | ε1 |
"""""""""
Аналогично,
| wn |≤| w0 | (1 + Kh) n + h(1 + Kh) n −1 | ε 0 | + h(1 + Kh) n − 2 | ε 1 | + " + h | ε n −1 |
n
Учитывая, что n ≤ N , h =
H
N
, hN = H , 1 < 1 + Kh < (1 + Kh) N
| w0 |=| ε 0 |≤ ε ( h ) ,| ε1 |≤ ε ( h ) ,...,| ε n −1 |≤ ε ( h )
получим:
| wn |≤ ε
( h)
=H
(1 + Kh) (1 + h
+ " +
h)
N
N
⇐⇒| wn |≤ ε
( h)
H
(1 + H )(1 + Kh) h
⇒|wn |≤ ε ( h ) (1+ H )eKH , ∀n
Поэтому,
∃ h0 : ∀h ≤ h0 :
w(
h)
< C1 ε (
h)
,
w( h ) = z ( h ) − y ( h ) , C1 = (1 + H )e KH
Устойчивость схемы Эйлера доказана.
Следствие. По теореме 1 порядок сходимости устойчивой схемы совпадает с порядком
аппроксимации, т.е. для схемы Эйлера в силу Утв.1 и аппроксимация, и сходимость первого
порядка.
50.
Модифицированные методы Эйлера 2–го порядка точности.
1) Модифицированный метод Эйлера.
⎧ yn +1 = yn + hf 2 ,
⎪
h
h ⎞
⎪
⎛
⎨ f1 = f ( xn , yn ) , f 2 = f ⎜ xn + , yn + f1 ⎟ ,
2
2 ⎠
⎝
⎪
0
⎪y = y
⎩ 0
2)
Метод Эйлера с пересчетом.
h
⎧
⎪ yn +1 = yn + 2 ( f1 + f 2 ) ,
⎪
⎨ f1 = f ( xn , yn ) , f 2 = f ( xn + h, yn + hf1 ) ,
⎪
0
⎪ y0 = y
⎪⎩
60.
Классический метод Рунге–Кутты 4–го порядка точности.
h
⎧
⎪ yn +1 = yn + 6 ( f1 + 2 f 2 + 2 f3 + f 4 ) ,
⎪
⎪ f = f x , y , f = f ⎛ x + h , y + h f ⎞,
( n n) 2 ⎜ n
n
1⎟
⎪ 1
2
2 ⎠
⎝
⎨
⎪
h
h ⎞
⎛
⎪ f3 = f ⎜ xn + , yn + f 2 ⎟ , f 4 = f ( xn + h, yn + hf 3 )
2
2 ⎠
⎝
⎪
⎪ y = y0
⎩ 0
§ 2.
Разностный метод решения краевой задачи.
10.
Разностная схема краевой задачи.
Рассмотрим дифференциальную задачу
⎧ y′′ − q ( x) y = f ( x), q ( x) > 0, 0 < x < l ,
⎨
⎩ y (0) = 0, y (l ) = 0
в операторном виде
⎧ y′′ − q( x) y ⎫ ⎧ f ( x) ⎫
⎪
⎪ ⎪
⎪
Ly = ⎨ y (0) ⎬ = ⎨ 0 ⎬ = ϕ .
⎪ y (l ) ⎪ ⎪ 0 ⎪
⎩
⎭ ⎩
⎭
Заменяя выражение для второй производной на сетке разностным отношением
yn+1 − yn
− yn −hyn−1 yn +1 − 2 yn + yn −1
h
y′′ ≈
=
,
h
h2
получим разностную краевую задачу:
⎧
⎫
⎪ yn +1 − 2 yn + yn −1
− qn yn ⎪⎪
⎪
2
⎧ fn ⎫
⎪
⎪
h
⎪
⎪
⎪ ⎪
(h) ⎪
(h)
⎪
⎬ = ⎨ 0 ⎬=ϕ
Lh y = ⎨
y0
⎪
⎪
⎪
⎪
⎪0⎪
yN
⎪
⎪
⎩ ⎭
⎪
⎪
⎪
⎩
⎪
⎭
СЛАУ из N+1 уравнения имеет трехдиагональную матрицу. Схема неявная.
20.
Порядок аппроксимации разностной схемы для краевой задачи.
yn +1 − 2 yn + yn −1 1 ⎡
h2
h3
h 4 ( 4)
′
′′
′′′
= 2 ⎢ y ( xn ) + hy ( xn ) + y ( xn ) +
y ( xn ) + y ( xn + θ1h ) −
h2
h ⎢⎣
2
3!
4!
⎤
h2
h3
h4
− 2 y ( xn ) + y ( xn ) − hy′ ( xn ) + y′′ ( xn ) −
y′′′ ( xn ) + y ( 4) ( xn − θ 2 h ) ⎥ =
2
3!
4!
⎥⎦
h2
= y′′ ( xn ) + ⎡⎣ y ( 4) ( xn + θ1h ) + y ( 4) ( xn − θ 2 h ) ⎤⎦
24
Второй порядок аппроксимации.
30.
Метод разностной (алгебраической) прогонки.
Рассмотрим метод решения СЛАУ с трехдиагональной матрицей:
An yn +1 − Cn yn + Bn yn −1 + Fn = 0, n = 1, N − 1
(1)
(
y0 = α y1 + β , (2)
)
yN = γ yN −1 + δ ,
(3)
где условия (2) и (3) задают граничные условия на левом и правом концах интервала
интегрирования дифференциального уравнения. Предположим:
An , Bn , Cn > 0, Cn ≥ An + Bn (4)
0 ≤ α < 1, 0 ≤ γ < 1,
Для разностной схемы краевой задачи эти условия выполнены.
Ищем решение уравнений (1) (значения сеточной функции y(h)) в виде, порожденным
граничным условием (2)):
yn −1 = α n yn + β n ,
(5)
где αn, βn – неизвестные коэффициенты, причем
α1 = α , β1 = β .
(6)
Подставляя (5) в (1), получим СЛАУ относительно yn, yn+1:
1 ⋅ yn − α n +1 ⋅ yn +1 = β n +1 ,
( Bnα n − Cn ) ⋅ yn + An ⋅ yn +1 = −( Fn + Bn β n )
Для любого n имеем тождества, когда коэффициенты пропорциональны:
−α n +1
β n +1
1
=
=
.
Bnα n − Cn
An
−( Fn + Bn β n )
Отсюда находим "прогоночные" коэффициенты
An
F + Bn β n
(7)
α n +1 =
, n = 1, N − 1
, β n +1 = n
Cn − Bnα n
Cn − Bnα n
(
)
Замечание. Докажем, что для любого n выполнено неравенство:
0 ≤ αn < 1
(8)
В самом деле, из (4) следует, что
Cn ≥ An + Bn⇒ Cn = An + Bn + Dn , Dn ≥ 0.
из (7)
An
An
α n +1 =
⇒ α n +1 =
Cn − Bnα n
An + [ Bn (1 − α n ) + Dn ]
(6) и (9)
⇒ α1 < 1 ⇒ B1 (1 − α1 ) + D1 > 0 ⇒ α 2 < 1,
α 2 < 1 ⇒ B2 (1 − α 2 ) + D2 > 0 ⇒ α 3 < 1,
""""""""""""""
α n −1 < 1 ⇒ Bn −1 (1 − α n −1 ) + Dn −1 > 0 ⇒ α n < 1.
Итак, ∀n : 0 ≤ α n < 1 ⇒ Cn − Bnα n > 0 , так как
Cn − Bnα n > Cn − Bn ≥ An > 0 по условию (4).
"Прямая прогонка".
Зная, что n=1: α1 = α , β1 = β (6), находим αN, βN, подставляя в (7) n=N-1.
Следовательно, в силу (5) и (3) имеем систему уравнений:
⎧ yN −1 = α N yN + β N ,
(10)
⎨
⎩ yN = γ yN −1 + δ .
(9)
Отсюда, исключая yN-1, находим yN - решение на правом конце интервала интегрирования
уравнения:
y N = γ (α N y N + β N ) + δ ⇒
(11)
γβ + δ
yN = N
1 − γα N
где 1-γαN>0, так как γ<1 и αN<1.
"Обратная прогонка".
Полагая в формуле (5)
yn −1 = α n yn + β n
последовательно n = N , N − 1, " ,1 , находим значения в узлах сетки:
yN −1 , yN − 2 , ", y1 , y0 ,
а, следовательно, y0 - решение на левом конце интервала интегрирования уравнения.