НТО КЭ Радиолокатор - Координационный научно
advertisement

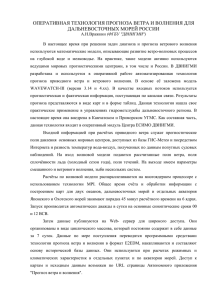
Научно-техническое обоснование КЭ «Измерение дисперсии наклонов морского волнения, высоты значительного волнения и скорости приповерхностного ветра радиолокатором СВЧ- диапазона с веерной диаграммой направленности антенны» Шифр КЭ - «Радиолокатор» Содержание 1. СУЩНОСТЬ ИССЛЕДУЕМОЙ ПРОБЛЕМЫ. КРАТКАЯ ИСТОРИЯ И СОСТОЯНИЕ ВОПРОСА В НАСТОЯЩЕЕ ВРЕМЯ........................................................................ 3 2. ОБОСНОВАНИЕ НЕОБХОДИМОСТИ ПРОВЕДЕНИЯ КЭ В УСЛОВИЯХ КОСМИЧЕСКОГО ПРОСТРАНСТВА ............................................................................................... 5 3. ОПИСАНИЕ КЭ .................................................................................................................. 6 4. НОВИЗНА, ОЦЕНКА КАЧЕСТВЕННОГО УРОВНЯ ПО СРАВНЕНИЮ С АНАЛОГИЧНЫМИ ОТЕЧЕСТВЕННЫМИ И ЗАРУБЕЖНЫМИ ИССЛЕДОВАНИЯМИ .......... 8 5. ОЖИДАЕМЫЕ РЕЗУЛЬТАТЫ И ИХ ПРЕДПОЛАГАЕМОЕ ИСПОЛЬЗОВАНИЕ.. 11 6. ОБОСНОВАНИЕ ТЕХНИЧЕСКОЙ ВОЗМОЖНОСТИ СОЗДАНИЯ ЭКСПЕРИМЕНТАЛЬНОГО ОБОРУДОВАНИЯ ............................................................................ 11 7. СПИСОК ЦИТИРУЕМОЙ ЛИТЕРАТУРЫ ................................................................. 199 8. ПЕРЕЧЕНЬ УСЛОВНЫХ СОКРАЩЕНИЙ И АББРЕВИАТУР .................................. 22 2 1. СУЩНОСТЬ ИССЛЕДУЕМОЙ ПРОБЛЕМЫ. КРАТКАЯ ИСТОРИЯ И СОСТОЯНИЕ ВОПРОСА В НАСТОЯЩЕЕ ВРЕМЯ Средства и методы дистанционного зондирования морской поверхности активно развиваются последние двадцать лет. Скаттерометры обеспечивают оперативное получение глобальной информация о поле приповерхностного ветра над поверхностью Мирового океана. Данные ассимилируются в метеорологические и климатические модели. Благодаря скаттерометрам и радиоальтиметрам океанологи имеют возможность развивать региональные и глобальные модели волнового климата. Современные прогнозы погоды базируются на данных спутникового мониторинга. Преимущество активных радиолокационных систем СВЧ-диапазона связано с возможностью получения информации вне зависимости от времени суток, облачности и других внешних факторов. Скаттерометры обладают широкой полосой обзора, что позволяет в течение суток провести измерения над 90% поверхности Мирового океана. В зависимости от угла падения зондирующего излучения на морскую поверхность выделяют область малых углов падения (<10-15), где механизм обратного рассеяния в СВЧ-диапазоне является квазизеркальным, и область средних углов падения (35-65), где рассеяние носит резонансный характер. Для описания морского волнения часто используют понятие двухмасштабной модели, в соответствии с которой рассеивающая поверхность представляется в виде крупномасштабного волнения, покрытого мелкой рассеивающей рябью. Скаттерометры работают в области средних углов падения и измеряют сечение обратного рассеяния. Сечение обратного рассеяния зависит от спектральной плотности резонансной ряби, которая генерируется непосредственно ветром и быстро затухает при его отсутствии. Вклад крупных волн, которые не всегда связаны с локальным ветром, сводится к модуляции мощности отраженного сигнала за счет изменения локального угла падения зондирующего излучения. В результате связь скорости ветра и сечения обратного рассеяния не является однозначной и это является одной из основных причин ошибок стандартных скаттерометрических алгоритмов при восстановлении скорости ветра только по сечению обратного рассеяния. Отметим, что при средних углах падения информация о крупномасштабном волнении не может быть восстановлена, если элемент разрешения радиолокатора больше доминантной длины волны в спектре морского волнения. Типичный размер рассеивающей ячейки у скаттерометра составляет 25км х 25км, т.е. скаттерометр не «видит» крупные волны и может определить только среднюю скорость ветра в ячейке. В перспективном российском скаттерометре океанографического космического аппарата (КА) космического комплекса (КК) «Метеор-МП» для измерения параметров волнения планируется ввести канал вблизи надирного зондирования. Предполагается последовательно использовать два режима работы радиолокатора, что позволит в одном режиме измерять дисперсию наклонов крупномасштабного волнения, а в другом – высоту значительного волнения. При малых углах падения механизм обратного рассеяния СВЧ-излучения взволнованной водной поверхностью является квазизеркальным и отраженный сигнал содержит информацию о характеристиках крупномасштабного волнения. Сечение обратного рассеяния зависит от дисперсии наклонов крупномасштабного волнения, и, следовательно, можно измерить дисперсию наклонов и определить направление распространения доминирующей системы волнения. Импульсная переходная характеристика отклика (одномерное радиолокационное изображение) содержит 3 информацию о высоте значительного волнения. В связи с этим канал вблизи надирного зондирования представляет интерес с точки зрения измерения параметров крупномасштабного волнения. Для реализации данной возможности были разработаны различные радиолокационные системы. Первый самолетный радиолокатор был разработан в США [1]. Конструкция оказалась оптимальной и до настоящего времени в США радиолокаторы такого типа активно применяются для исследования волнения, например, [2-5]. Радиолокатор устанавливается под днище самолета и узкая диаграмма направленности антенны ориентирована вертикально вниз. При полете происходит сканирование в направлении перпендикулярном направлению полета и формируется полоса обзора с пространственным разрешением менее 1 м. При последующей обработке полученного изображения восстанавливается спектр высот и дисперсия наклонов в перпендикулярном полету направлении. Специализированные научно-исследовательские самолеты активно применяются для изучения волнения во Франции [6, 7]. Первая попытка использовать радиолокатор с реальной апертурой для измерения спектра крупных волн с космического носителя была предпринята в 2001 году, когда была опубликована концепция нового радиолокатора (SWIMSAT) [8]. За прошедшее время концепция SWIMSAT была доработана и радиолокатор вошел в состав французско-китайского спутника дистанционного зондирования CFOSAT, который будет запущен в 2015 году [9]. Это будет первый спутник, который способен одновременно измерять поле ветра и спектр высот морского волнения. Альтернативным источником информации о волнении являются радиолокаторы с синтезированной апертурой (РСА). При зондировании суши современные РСА обладают высоким пространственным разрешением в несколько метров. К сожалению, такого высокого разрешения не удается получить по морской поверхности, т.к. волны движутся и вносят существенные искажения в РСА изображение. Кроме того, спектр РСА изображения и спектр морского волнения связаны нелинейным преобразованием, которое в общем случае неизвестно. Именно эта проблема и подтолкнула французских исследователей к необходимости использования для измерения спектра волнения радиолокатор с реальной апертурой SWIMSAT, который не обладает подобным недостатком. Однако используя результаты измерений SWIMSAT невозможно восстановить спектр наклонов волн в высокочастотной части, потому что минимальная детектируемая им длина волны составляет 35 м. В то же время перспективный российский скаттерометр позволит восстанавливать интегральную характеристику – полную дисперсию наклонов крупномасштабного волнения (волны > 0,3 м 0,5 м), что позволит существенно дополнить информацию, получаемую от SWIMSAT. С середины 90-х годов в Институте прикладной физики РАН был выполнен ряд работ, посвященных теоретическому исследованию энергетических и спектральных характеристик радиолокационного СВЧ сигнала, рассеянного взволнованной водной поверхностью. Была разработана модифицированная теория резонансного рассеяния в области средних углов падения и построены новые модели сечения обратного рассеяния и доплеровского спектра [10]. Для малых углов падения были разработаны новые модели сечения обратного рассеяния и доплеровского спектра, учитывающие ширину диаграммы направленности антенны и скорость движения радиолокатора [11, 12]. Благодаря этому теоретическому заделу впоследствии были получены оригинальные результаты, связанные с дистанционным зондированием [13]. Была построена теоретическая модель формы отраженного от взволнованной водной поверхности импульса для радиолокатора с веерной диаграммой 4 направленности антенны. Было показано, что при вертикальном зондировании с самолета форма отраженного импульса содержит информацию о высоте значительного волнения и дисперсии наклонов [14, 15]. У коллектива накоплен значительный опыт проведения экспериментов в лабораторных и натурных условиях. Для проверки разработанных теоретических моделей доплеровского спектра и сечения обратного рассеяния проводились измерения с моста через р.Ока доплеровским радиолокатором [16]. Для проверки алгоритмов восстановления параметров волнения в условиях более приближенных к морским (без течения), выполнялись измерения с вертолета при полетах над Горьковским водохранилищем [17]. Важным направлением исследований является разработка новых алгоритмов восстановления скорости ветра и параметров волнения по данным космических радиолокаторов. Были разработаны двухпараметрические алгоритмы восстановления скорости ветра по радиоальтиметрическим измерениям [18, 19]. Анализ данных дождевого радиолокатора (PR) позволил разработать алгоритмы восстановления дисперсии наклонов крупномасштабного волнения в направлении перпендикулярном направлению полета [20, 21]. Данные дождевого радиолокатора использовались для имитации измерений радиолокатором с веерной диаграммой направленности антенны и было показано, что разработанные алгоритмы работают и позволяют измерять дисперсию наклонов в канале вблизи надирного зондирования [22, 23]. Перспективный российский скаттерометр океанографического КА КК «МетеорМП» по своим возможностям отвечает требованиям потребителей и расширяет возможности дистанционного мониторинга состояния морской поверхности и измерению поля приповерхностного ветра. Предлагаемый скаттерометр уникален в том, что позволяет получить целевую информацию, которую не способны предоставить другие существующие методы дистанционного зондирования, включая скаттерометры наклонного зондирования, РСА и СВЧ-радиометры. Настоящий космический эксперимент (КЭ) направлен на развитие дистанционных средств и методов наблюдения окружающей среды. Физической основой выполнения научных задач данного эксперимента является зависимость измеряемого сечения обратного рассеяния и формы отраженного импульса от дисперсии наклонов и высоты морского волнения. Помимо научной составляющей КЭ имеет важную практическую составляющую – впервые в российской космонавтике создается аппаратура для канала вблизи надирного зондирования и проверка ее работоспособности в условиях космического пространства необходима для успешного осуществления основной миссии. 2. ОБОСНОВАНИЕ НЕОБХОДИМОСТИ ПРОВЕДЕНИЯ КЭ В УСЛОВИЯХ КОСМИЧЕСКОГО ПРОСТРАНСТВА Необходимость проведение КЭ на МКС обусловлена следующими причинами. Реализуемый в перспективном российском скаттерометре океанографического КА КК «Метеор-МП» канал вблизинадирного зондирования не имеет точных аналогов среди существующих космических систем. Проведение эксперимента позволит получить большой объем данных и отработать процедуры сбора, передачи данных и алгоритмы первичной обработки, а также проверить эффективность алгоритмов тематической обработки и методику ассимиляции новой информации Росгидрометом и другими пользователями. Сравнение с данными контактных измерений (морские буи) 5 позволит провести оценку точности алгоритмов и при необходимости выполнить их доработку. В канале вблизи надирного зондирования планируется использовать радиолокатор с фазированной антенной решеткой (АФАР), который не применялся в российской космонавтике. Космический эксперимент позволит выполнить полномасштабное тестирование новой техники и оптимизировать параметры прибора под решение поставленных задач. На американском модуле МКС в 2016 году будет установлен скаттерометр SeaWinds, соответствующий каналу наклонного зондирования российского скаттерометра океанографического КА КК «Метеор-МП». В результате на орбите будет функционировать прототип будущего российского скаттерометра, что позволит разработать алгоритмы совместного анализа данных каналов наклонного и вблизи надирного зондирования. Информация о морском волнении и скорости ветра будет доступна метеорологам и океанологам, что позволит им начать разработку алгоритмов ассимиляции новой информации в свои модели еще до запуска российского скаттерометра в составе океанографического КА КК «Метеор-МП». Таким образом, это позволит минимизировать время между началом работы скаттерометра и использованием его данных потребителями. 3. ОПИСАНИЕ КЭ В ходе КЭ будет выполнена проверка работоспособности радиолокатора с АФАР для двух режимов работы: 1) измерение дисперсии наклонов крупномасштабного волнения и 2) измерение высоты значительного волнения. В эксперименте планируется использовать импульсный радиолокатор (длина волны изучения ≈0,0222 м) с веерной диаграммой направленности антенны (≈1х30). Ориентация диаграммы направленности (ДН) выбрана такой, чтобы пятно облучения на поверхности Земли было вытянуто вдоль направления полета, при направлении зондирования вертикально вниз. Измерение высоты значительного волнения выполняется в канале вблизи надирного зондирования по переднему фронту отраженного импульса после процедуры сжатия. Этот принцип измерения высоты волн используют космические радиоальтиметры. Измерение дисперсии наклонов крупномасштабного волнения в канале вблизи надирного зондирования выполняется путем измерения мощности отраженного радиолокационного сигнала от элементов разрешения на поверхности Земли. Пространственная селекция производится по допплеровскому сдвигу частоты. Для обеспечения полосы обзора вдоль траектории полета, а также необходимого количества наблюдений каждого элемента полосы обзора, вместо вращения антенны вокруг вертикальной оси предлагается использовать режим сканирования в направлении, перпендикулярном направлению полета, как это реализовано в дождевом радиолокаторе (PR). Для обеспечения такого режима работы предполагается использовать АФАР. Схема измерения показана на рис. 1. 6 Рис. 1. Схема измерений в канале вблизи надирного зондирования. В режиме измерения дисперсии наклонов при высоте орбиты 400-450 км обеспечивается полоса обзора около 200 км. Размер элемента полосы обзора 14 км х 14 км. Частота повторения зондирующих импульсов определяется расстоянием до поверхности и составляет 171 Гц. Шаг сканирования составляет около 1,8° (15 положений главного лепестка антенны). Положение максимума диаграммы направленности последовательно изменяется с каждым зондирующим импульсом. Частота сканирования 11,4 Гц. При скорости полета около 7 км/с будет получено необходимое количество независимых измерений энергии отражённого сигнала, достаточное для восстановления дисперсии наклонов и удельной эффективной площади рассеяния (УЭПР) во всех элементах полосы обзора. В режиме измерения высоты значительного волнения главный лепесток диаграммы направленности ориентирован в надир. Зондирующий сигнал имеет линейную частотную модуляцию (ЛЧМ), с шириной полосы не менее 300 МГц. Сигнал излучается пачками, частота повторения пачек соответствует частоте повторения импульсов в первом режиме, число импульсов в пачке – 3. Обработка сигнала от одного импульса позволяет получить одномерное радиолокационное изображение (РЛИ), размер переходной области на котором связан с высотой значительного волнения. Для достижения необходимой точности восстановления высоты волнения производится некогерентное усреднение большого количества РЛИ (не менее 400). Радиолокатор устанавливается вне гермоотсека. Антенная система не должна затеняться другими приборами и конструкциями РС МКС. Для проведения измерений требуется такая ориентация РС МКС, чтобы электрические оси антенны радиолокатора были направлены в надир и диаграмма направленности была ориентирована вдоль направления полета. Объектом исследования является водная поверхность крупных внутренних водоемов, морей и океанов. Для отработки алгоритмов восстановления наблюдения проводятся по всей поверхности земного шара, доступной для наблюдения с орбиты МКС в надир. 7 Для отработки методик обработки и валидации алгоритмов восстановления дисперсии наклонов и скорости приповерхностного ветра наблюдения будут проводится в следующих регионах: Черное море Мексиканский залив Гавайские острова вблизи морских NDBC буев (западное побережье США) Число сеансов и длительность включения аппаратуры определяются необходимостью получения регулярных измерений в указанных районах. Для получения необходимого числа наблюдений с целью верификации разрабатываемых алгоритмов необходимо на протяжении 3 лет (продолжительность КЭ) производить не менее 3 включений в сутки. Для получения измерений в области размером 200х200 км необходима продолжительность выполнения измерений не менее 1 мин. С учётом времени на выход аппаратуры в рабочий режим и калибровку, длительность включений целесообразно выбрать от 2 до 3 мин. Должна быть обеспечена возможность оперативного планирования наблюдений. Состояние и работоспособность НА определяется по анализу телеметрической информации. На основе научных и телеметрических данных осуществляется контроль работоспособности НА и формирование банка научных данных. Критерием оценки выполнения эксперимента является получение экспериментальных данных, из которых не менее 80% объёма удовлетворяют критерию качества – пригодны для тематической обработки. Полнота выполнения КЭ – разработка эффективных методик обработки и алгоритмов восстановления дисперсии наклонов крупномасштабного волнения и скорости приповерхностного ветра, экспериментальное определение показателей надёжности АФАР скаттерометра, определение оптимального распределения режимов работы скаттерометра во времени. Валидация результатов обработки экспериментальных данных будет осуществляться с привлечением данных морских буев и данных других подспутниковых экспериментов, а также других спутниковых систем наблюдения, например: дождевого радиолокатора, радиоальтиметра, скаттерометра. Синхронизация эксперимента с измерениями скаттерометра SeaWinds американского сегмента МКС позволит провести отладку алгоритмов предварительной и тематической обработки для конфигурации перспективного российского скаттерометра океанографического КА КК «Метеор-МП». Данные будут передаваться потенциальным потребителям для разработки алгоритмов ассимиляции новой информации в свои модели. 4. НОВИЗНА, ОЦЕНКА КАЧЕСТВЕННОГО УРОВНЯ ПО СРАВНЕНИЮ С АНАЛОГИЧНЫМИ ОТЕЧЕСТВЕННЫМИ И ЗАРУБЕЖНЫМИ ИССЛЕДОВАНИЯМИ В настоящее время нет космической радиолокационной системы, позволяющей непрерывно собирать информацию о крупномасштабном волнении в полосе обзора. Радиоальтиметры измеряют высоту значительного волнения только вдоль траектории полета с периодом повторения равным 10 суткам. Расстояние между последовательными витками составляет несколько сотен километров. 8 Дисперсию наклонов крупномасштабного волнения в направлении перпендикулярном направлению движения может измерять дождевой радиолокатор (PR), однако полную дисперсию наклонов он восстановить не может. Спектр высот может быть измерен с помощью космического РСА, однако измерения над морской поверхностью являются эпизодическими и делаются в основном под заказ на платной основе. Первый радиолокатор, способный обеспечить глобальные непрерывные измерения спектра высот морского волнения, будет установлен на французскокитайском спутнике CFOSAT, который будет запущен в 2015 году. На рис.2 показана схема измерения SWIMSAT. Рис. 2. Схема измерения SWIMSAT. Вертикальный луч работает в режиме радиоальтиметра и измеряет высоту значительного волнения. Пять других лучей используются для восстановления спектра волнения. В то же время, как уже было сказано выше, SWIMSAT предназначен для работы в длинноволновой части спектра волнения (волна > 35 м). Американо-французский проект по измерению уровня Мирового океана и высоты значительного волнения в полосе обзора около 100 км находится в стадии разработки и планируемая дата запуска 2020 год [24, 25]. На рис. 3 показана схема зондирования SWOT. 9 Рис. 3. Схема измерения французско-американской миссии SWOT. SWOT представляет собой радиоальтиметр с широкой полосой обзора. Она образуется из двух боковых полос шириной по 60 км, в которых реализуется интерферометрическая схема измерения в Ка-диапазоне, и центральной полосы, в которой используется вертикальный луч обычного двухдиапазонного C/Ku радиоальтиметра. Основной информационный продукт SWOT – карта уровня поверхности с высоким пространственным разрешением до 2х10 м. Уровень высот значительного волнения и УЭПР морской поверхности получаются как побочный продукт после усреднения по ячейкам порядка 1х1 км. При этом алгоритмы восстановления спектральных характеристик волнения по результатам измерений SWOT в настоящее время отсутствуют. Также в схеме измерений SWOT не предусмотрено достаточное количество измерений под различными углами падения. Таким образом, предлагаемый КЭ находится на мировом уровне. За счет оригинального технического решения российский радиолокатор конструктивно существенно проще, чем зарубежные аналоги. В то же время теоретические исследования, численное моделирование и эксперимент показали, что радиолокатор с веерной диаграммой направленности антенны при использовании двух режимов 10 работы способен измерять высоту значительного волнения, дисперсию наклонов крупномасштабного волнения, направление распространения доминирующей системы волнения, определять скорость ветра и оценивать среднюю длину волны в спектре. 5. ОЖИДАЕМЫЕ РЕЗУЛЬТАТЫ И ИХ ПРЕДПОЛАГАЕМОЕ ИСПОЛЬЗОВАНИЕ В ходе данного эксперимента будут исследованы возможности радиолокационной аппаратуры канала вблизи надирного исследования и решены следующие задачи: проведено тестирование в космических условиях первого российского радиолокатора с АФАР, обеспечивающей сканирование веерной диаграммой направленности в направлении, перпендикулярном направлению полета. Полученная информация будет использована при разработке радиолокатора для перспективного российского скаттерометра океанографического КА КК «Метеор-МП»; проведены измерения в режиме измерения высоты волнения и в режиме измерения дисперсии наклонов и отработаны процедуры записи, предварительной обработки и передачи данных; проведены совместные измерения в канале наклонного зондирования (американский модуль) и вблизи надирного зондирования (российский модуль) и разработаны алгоритмы тематической обработки и совместного анализа радиолокационных данных. В результате выполнения КЭ будут накоплены необходимые наборы данных, развиты модели и алгоритмы, отработаны методики проведения измерений, калибровки и валидации экспериментальных данных. Тематическая информация будет передаваться пользователям для разработки программ ассимиляции новых данных в метеорологические и океанологические модели. Информация является уникальной и будет востребована потребителями не только в России. В результате проведения КЭ будет сокращено до минимума время от начала функционирования скаттерометра до поступления данных потребителям, а также проведено тестирование в космических условиях радиолокатора с АФАР. 6. ОБОСНОВАНИЕ ТЕХНИЧЕСКОЙ ВОЗМОЖНОСТИ СОЗДАНИЯ ЭКСПЕРИМЕНТАЛЬНОГО ОБОРУДОВАНИЯ Научная аппаратура КЭ «Радиолокатор» (НА «РЛ-022») предназначена для дистанционного измерения высоты значительного волнения и дисперсии наклонов крупномасштабного волнения в заданной полосе обзора. Кроме того будет определяться скорость ветра и средняя длина волны в спектре. Для решения поставленных в КЭ «Радиолокатор» задач, как показывает предварительная проработка, НА «РЛ-022» должна быть реализована в виде сканирующего радиолокатора СВЧ- диапазона с веерной формой главного лепестка диаграммы направленности антенны. НА «РЛ-022» должна отвечать следующим основным требованиям. Состав научной аппаратуры В состав НА «РЛ-022» должны входить: Антенная система (АС) в виде АФАР; Измеритель рассеяния (ИР) – СВЧ-приёмопередатчик; 11 Блок электроники (БЭ), осуществляющий управление и сбор телеметрической и научной информации. В состав каждого блока должны входить вторичный источник питания (ВИП), механические интерфейсы для установки и комплекты соединительных жгутов и кабелей. Технические требования к НА «РЛ-022» НА «РЛ-022» является импульсным радиолокатором, который должен излучать и принимать излучение на длине волны около 2,22 см. НА «РЛ-022» должна иметь технические характеристики, представленные в таблицах 1 и 2. Таблица 1 – Технические характеристики НА «РЛ-022» Параметр Режимы работы Значение 1) измерение дисперсии наклонов 2) измерение высоты волнения Центральная частота сигнала, ГГц 13,5 Сканирование Электронное Угол наклона луча, 013 Ширина ДН по уровню половинной мощности в продольной 1,5° плоскости, не более, ° Ширина ДН по уровню половинной мощности в поперечной 30,8±0,7 плоскости, ° Поляризация Линейная Импульсная мощность сигнала, не менее, Вт 15 Ширина полосы обзора, км 200±10 Размеры элемента полосы обзора, км 14х14 Информативность, не более, Мбит/с 10 Параметры сигнала в режиме 1 Вид сигнала немодулированный Длительность импульса, мс 2,6 Период повторения импульсов, мс 5,85 Параметры сигнала в режиме 2 Вид сигнала ЛЧМ Ширина полосы сигнала, не менее, МГц 300 Длительность импульса, мс от 0,25 до 0,5 Частота повторения импульсов, КГц от 0,85 до 1,0 Число импульсов в пачке 3 Период повторения пачек импульсов, мс от 5,3 до 5,7 Параметры сигнала в режиме 2 уточняются в процессе проектирования Таблица 2 – Масса, габариты и энергопотребление блоков НА «РЛ-022» Наименование Габариты, не более, Масса, не Потребляемая мм более, кг мощность, не более, Вт АС 1100х220х220 35,0 220 12 Наименование ИР Габариты, не более, мм 400х300х100 Масса, не более, кг 10,0 Потребляемая мощность, не более, Вт 80 БЭ 400х300х100 10,0 80 Приведённые характеристики не являются предельными для современных локаторов. Проведенная предварительная проработка технической реализуемости и облика НА «РЛ-022» показала, что АФАР может быть реализована в виде линейной антенной решётки из 64 излучающих элементов на основе печатных излучателей в виде коллинеарных антенн Франклина (рис. 4). Шаг излучателей 16 мм. Устойчивость излучателей к воздействующим факторам космического пространства обеспечивается применением технологии LTCC. Для обеспечения развязки приёмного и передающего каналов используются раздельные приёмные и передающие излучатели. Сканирование главного луча осуществляется фазовым методом в продольной плоскости в секторе углов ± 13 градусов. Рис. 4. Излучатель АФАР – симметричная коллинеарная антенна Франклина в печатном исполнении 13 Рис. 5. Диаграммы направленности коллинеарной антенны на частоте 13,5 ГГц в Н-плоскости (1) и в Е-плоскости (2) Рис. 6. ДН, формируемая синфазным раскрывом полосковых излучателей при различных углах отклонения максимума. 14 Рис. 7. Структурная схема АФАР. B1-B16 – приёмо-передающие модули, K1K4 – приёмо-передающие каналы, WA1, WA2 – приёмный и передающий излучатели, A1 – усилитель мощности, A2 – малошумящий усилитель, Z1,Z2 – вентили, Z3 – переключатель, P1 – фазовращатель (5 бит), BA1 – схема управления приёмопередающим модулем, WT – контрольный излучатель, D16.1, D16.2 – разветвители синхроимпульсов (основной и резервный), C1.1, C1.2 – контроллеры шины управления АФАР (основной и резервный), S16.1, S16.2 – делители/сумматоры СВЧ. 15 Рис. 8. Структурная схема СВЧ-части измерителя рассеяния. КИ – контрольные излучатели, УМ – усилитель мощности, АЦП – аналого-цифровой преобразователь, ФС – формирователь сигналов, МШУ – малошумящий усилитель, БЦОС – блок цифровой обработки сигнала, ЦИ – целевая информация. Измеритель рассеяния (ИР) в составе НА «РЛ-022» – электронный блок, обеспечивающий формирование, приём и цифровую обработку зондирующего сигнала, внутреннюю синхронизацию, диагностику АФАР. Блок электроники БЭ обеспечивает внешнюю временную синхронизацию, обмен данными с внешней бортовой аппаратурой. Структурные схемы основных составляющих радиолокатора приведены на рисунках 7 и 8. Синтез структуры произведён исходя из необходимости обеспечения: стабильности работы радиолокатора, внутренней калибровки ИР, проверки изменения комплексных коэффициентов передачи приёмо-передающих каналов АФАР во всех состояниях, минимизации массогабаритных характеристик и энергопотребления. Для реализации двух режимов работы НА, формирователь сигналов (ФС) должен обеспечивать формирование как немодулированного сигнала, так и широкополосного ЛЧМ-импульса с заданными частотно-временными характеристиками. Аналоговая часть приёмного канала измерителя рассеяния является общей, причём в качестве гетеродина используется сам ФС. Это позволяет осуществить перенос частоты в обоих режимах работы, а для режима 2 – одновременное умножение на опорный импульс и сужение полосы частот. Ширина полосы на промежуточной частоте (ПЧ) равна 2,6 МГц для режима 1 (определяется удвоенным предельным допплеровским сдвигом частоты и запасом на отсчёты шума) и 4,1 МГц для режима 2 (определяется длительностью ЛЧМ-импульса и числом элементов разрешения в окне приёма по времени). Таким образом, тракт ПЧ и аналого-цифрового преобразования также может быть выполнен общим. Для двух режимов различаются способы цифровой обработки. Для режима 1 требуется преобразование Фурье с базой 8192 с выделением и суммированием шумовых отсчётов на краях анализируемой полосы частот и некогерентным усреднением групп соседних отсчётов в центре полосы. Для режима 2 также требуется преобразование Фурье, но с 16 меньшей базой (1024 или 2048), и с некогерентным усреднением отсчётов между импульсами, отсчёты. Так как бортовое некогерентное усреднение отсчётов крайне желательно для уменьшения общего потока информации от прибора, но его влияние на общее качество получаемой информации на практике не изучено, необходимо предусмотреть тестовые варианты цифровой обработки для каждого режима зондирования, при которых усреднение не применяется. Также ещё не изучено, как влияют погрешности восстановления дисперсии наклонов и высоты значительного волнения на. Одновременная работа в режиме 1 и режиме 2 невозможна, требуется их чередование. Время, которое НА работает в каждом из режимов, напрямую влияет на погрешность восстановления параметров морской поверхности, так как определяет количество некогерентно усредняемых измерений. В процессе КЭ необходимо определить оптимальное соотношение длительностей работы в каждом из режимов. Поэтому НА должна иметь возможность регулировать (путём передачи файла настроек) программу чередования режимов работы в течение сеанса измерений. Калибровка Основные шаги калибровки НА следующие: проверка работоспособности внутренней приёмопередающей петли ИР; проверка комплексных коэффициентов передачи каналов АФАР в режиме излучения; проверка комплексных коэффициентов передачи каналов АФАР в режиме приёма; шумовая калибровка приёмника. При излучении зондирующего сигнала часть его просачивается на вход малошумящего усилителя (МШУ) приёмника ИР через развязывающее устройство (циркулятор). Чтобы сигнал попал в динамический диапазон приёмника, используется дискретный регулируемый аттенюатор, имеющий 2 состояния – с низким и с высоким затуханием (ориентировочно 1 дБ и 40 дБ). Во время излучения он устанавливается в состояние с высоким затуханием. Усиленный сигнал смешивается сам с собой в квадратурном приёмном смесителе, что позволяет получить оценку сквозного коэффициента передачи тракта ИР в обоих режимах работы. Таким образом, контроль работоспособности внутренней приёмопередающей петли ИР может производиться во время каждого излучения импульса. Непосредственное измерение ДН АФАР средствами самой АФАР невозможно, а средствами экипажа МКС или с Земли технически затруднительно и экономически неэффективно. В то же время оценить состояние АФАР можно, измеряя амплитуднофазовые характеристики каналов АФАР. Для этого в состав приёмо-передающих модулей введены контрольные излучатели (КИ), которые имеют уровень связи с приёмным и передающим излучателями около минус 30 дБ. Для проверки комплексного коэффициента передачи канала АФАР в режиме излучения все каналы, кроме проверяемого, отключаются. Зондирующий сигнал проходит через делитель, указанный канал, попадает через КИ на вход контрольного квадратурного смесителя, в котором смешивается с зондирующим сигналом, ответвлённым с выхода усилителя мощности (УМ) ИР. Выходной сигнал с квадратурного калибровочного смесителя (перед которым не требуется МШУ) должен переключаться на двухканальный сигнальный АЦП, что позволяет получить реальную и мнимую части комплексного коэффициента передачи проверяемого канала с точностью до постоянного множителя. Проверка проводится для каждого канала во 17 всех состояниях фазовращателя для обоих видов зондирующего сигнала (для режима 1 и режима 2). Для проверки комплексного коэффициента передачи канала АФАР в режиме приёма также все каналы, кроме проверяемого, отключаются. В ИР зондирующий сигнал подаётся вместо основного УМ на УМ калибровки, и затем на КИ. Далее сигнал проходит через проверяемый канал, сумматор, и попадает на вход приёмника. Регулируемый аттенюатор может использоваться, как и при проверке приёмопередающей петли ИР, чтобы контрольный сигнал попал в динамический диапазон приёмника. В смесителе приёмника сигнал умножается на опорный, что позволяет оценить комплексный коэффициент передачи проверяемого канала с точностью до постоянного значения. Использование основного УМ для калибровки нецелесообразно вследствие того, уровень выходной мощности основного УМ составляет около 1,5 Вт, что приблизительно на 20 дБ выше, чем требуется для проведения калибровки. Полученные комплексные коэффициенты передачи передаются в составе целевой информации на Землю. При наземной обработке они оцениваются путём сравнения с результатами контрольных измерений, полученных на этапе наземной отработки НА и измерения диаграммы направленности АФАР. Это позволяет оценить работоспособность каждого канала, и используя полученную на этапе наземной отработки математическую модель АФАР, оценить изменение коэффициента усиления антенны и искажение диаграммы направленности. Также при необходимости, можно скорректировать программу управления фазовращателями для каждого из положений луча при сканировании, с учётом изменений характеристик каналов. Шумовая калибровка приёмного тракта радиолокатора заключается в оценке вклада шумов в отсчёты энергии сигнала. В режиме 1 уровень энергии шумов оценивается по отсчётам энергии в тех частях анализируемой полосы частот, где сигнал заведомо отсутствует, то есть за пределами максимального допплеровского сдвига ±655 кГц. В режиме 2 уровень энергии шумов определяется по отсчётам, которые соответствуют задержке по времени, заведомо меньшей времени распространения сигнала. Дополнительная шумовая калибровка, заключающаяся в приёме и цифровой обработке сигнала при отсутствии излучаемых импульсов (перед сеансом измерений) повышает точность определения энергии шумов. Алгоритмы тематической обработки построены так, что абсолютная амплитудная калибровка коэффициента передачи радиолокатора не требуется ни при восстановлении дисперсии наклонов, ни при измерении высоты волнения. Для обеспечения радиометрической стабильности тракта должна применяться термостабилизация аппаратуры. Восстановленные с точностью до постоянного множителя значения УЭПР в режиме 1 можно откалибровать, периодически зондируя известные протяжённые наземные цели (пустыня Сахара, леса Амазонки). Требования к выходным сигналам Выходная информация НА «РЛ-022» должна содержать: отсчёты энергии принятого сигнала, с привязкой к положению луча и бортовому времени; параметры калибровки; телеметрическую информацию; а также служебную информацию: координаты носителя в системе ПЗ-90 или WGS-84; данные ориентации носителя в орбитальной системе координат. Частота опроса телеметрических параметров должна быть не менее 2 Гц. 18 Информационный поток от НА не должен превышать 10 Мбит/с. При этом скорость получения информации без использования бортового усреднения составляет 11 Мбит/с для режима 1 и 16 Мбит/с для режима 2. Бортовое некогерентное усреднение по 4 соседних отсчёта для режима 1 или по 8 импульсам для режима 2 позволяет сократить скорость до 2,7 и 1,1 Мбит/с соответственно. Телеметрическая информация и параметры калибровки должны передаваться на Землю оперативно для оценки состояния НА и принятия мер по управлению ей. Объём оперативно передаваемой информации составит не более 300 Кб/сеанс. Отсчёты энергии сигнала могут быть записаны на сменный носитель в БЭ. Для записи научной информации с ожидаемой периодичностью доставки 1 раз в полгода необходим носитель объёмом около 500 Гб (с двукратным запасом для случая, когда бортовое усреднение не используется, 6 сеансов в день). В тестовом режиме без сжатия информация также должна быть передана оперативно для оценки влияния различных вариантов бортового усреднения на погрешность восстановления параметров морской поверхности. Объём информации без бортового усреднения составит не более 250 Мб/сеанс. Он может быть записан в память БЭ и потом выдан в бортовую информационную систему носителя со скоростью не более 10 Мбит/с после окончания измерений в тестовом сеансе. Тестовые сеансы необходимы только на начальном этапе КЭ, ожидаемое их количество – не более 4 за первый месяц выполнения КЭ. 7. СПИСОК ЦИТИРУЕМОЙ ЛИТЕРАТУРЫ 1. Keney J.E., E.A.Uliana and E.J.Walsh, 1979, The surface contour radar, a unique remote sensing instrument, IEEE Trans. Microwave Theory and Techniques, 27(12), 10801092 2. E.J.Walsh, D.C.Vandemark, C.A.Friehe, S.P.Burns, D.Khelif, R.N.Swift, J.F.Scott, Measuring sea surface square slope with a 36-GHz scanning radar altimeter, Journal of Geophysical Research, 1998, v. 103, N C6, pp. 12587-12601 3. Wright, C. W., and Coauthors, 2001: Hurricane directional wave spectrum spatial variation in the open ocean. J.Phys.Oceanogr., 31, 2472–2488. 4. Black, P. G., and Coauthors, 2007: Air–sea exchange in hurricanes: Synthesis of observations from the Coupled Boundary Layer Air–Sea Transfer experiment. Bull. Amer. Meteor. Soc., 88, 357–374. 5. Wright C.W., E.Walsh, W.Krabill, W.Shaffer, S.Baig, M.Peng, L.Pietrafesa, A.Garcia, F.Marks, P.Black, J.Sonntag, B.Beckley, Measuring storm surge with an airborne wide-swath radar altimeter, Journal of Atmospheric and Oceanic Technology, 2009, v. 26, N 10, pp. 2200-2215 6. Hauser D., G. Caudal, G.Rijckenberg, D.Vidal-Madjar, G.Laurent, P.Lancelin, 1992, RESSAC: A new airborne FM/CW radar ocean wave spectrometer, IEEE Trans. Geosci. Remote Sens., 30(5) 981-995 7. Podvin, D. H. T., Dechambre, M., Valentin, R., Caudal, G., & Daloze, J.-F, STORM: A New Airborne Polarimetric Real-Aperture Radar for Earth Observations, 2003, Proceedings of the Workshop on POLinSAR - Applications of SAR Polarimetry and Polarimetric Interferometry (ESA SP-529). 14-16 January 2003, Frascati, Italy. Editor: H. Lacoste. Published on CDROM., p.62.1 8. D.Hauser, E.Soussi, E.Thouvenot, L.Rey, SWIMSAT: A real-aperture radar to measure directional spectra of ocean waves from space - main characteristics and 19 performance simulation, Journal of Atmospheric and Oceanic Technology, 2001, 18, 3, pp. 421-437 9. P.Castillan, N. Corcoral, C. Tison, T. Amiot, E. Thouvenot, D. Hauser. The CFOSAT project: a cooperation to assess wave directional spectra and surface winds. Proceedings of IGARSS 2011 10. В.Ю.Караев, «К вопросу о доплеровском спектре радиолокационного СВЧ сигнала, отраженного морской поверхностью (переходная область, брэгговская компонента)», Изв. ВУЗов, сер. Радиофизика, 1997, т.40, N6, стр. 669-681 11. В.Ю.Караев, М.Б.Каневский, «К вопросу о радиолокационном определении параметров морского волнения», Исследование Земли из космоса, 1999, N4, стр.14-21 12. Е.Мешков, В.Ю.Караев, «Определение параметров морского волнения по доплеровскому спектру радиолокационного СВЧ сигнала, отраженного водной поверхностью», Известия ВУЗов, сер. Радиофизика, 2004, 47, N3, 231-244 13. Караев В., Коваленко А. Панорамный радиолокационный способ определения параметров состояния приповерхностного слоя океана со спутника, патент на изобретение N 2449312, зарегистрирован 27/04/2012 14. В.Караев, Е.Мешков, «Радиолокационный метод измерения параметров крупномасштабного волнения с самолета», V Всероссийская научная конференция "Радиофизические методы в дистанционном зондировании сред" в рамках Вторых Армандовских чтений, Муромский институт, филиал Владимирского государственного университета имени Столетовых, 26.06-28.06.2012, Муром, ISSN 2304-0297, CD-диск Материалы V Всероссийской научной конференции, стр. 209-213 15. V.Karaev, «Measurements of significant wave height and slopes variance using radar with knife-like antenna beam: new opportunities», IGARSS'2012, 22-27 July 2012, Munich, Germany, Proceeding of IGARSS, CD-Room 16. Е.М.Мешков, В.Ю.Караев, Г.Н.Баландина, Э.М.Зуйкова, В.Ю.Гольдблат, В.И.Титов, «К вопросу об измерении обратного рассеяния СВЧ-сигнала, отраженного взволнованной водной поверхностью при малых углах падения», препринт N 655, 2004, стр. 20 17. В.Караев, М.Каневский, Е.Мешков, «Восстановление параметров поверхностного волнения по результатам радиолокационных измерений», Исследование Земли из Космоса, 2008, N 1, 44-55 18. V.Yu.Karaev, M.B.Kanevsky, E.M.Meshkov, «Microwave radar probing of a rough water surface. Validation of retrieval algorithms using flight experiment data», International Journal of Remote Sensing, 2010, v. 31, N 9, 2293-2308 19. V.Yu.Karaev, M.B.Kanevsky, G.N.Balandina, P.D.Cotton, P.G.Challenor, G.P.Gommenginder, M.A.Srocosz, "On the problem of the near ocean surface wind speed retrieval by radar altimeter: two-parametric algorithm", Int.J.Remote Sensing, 2002, v.23, N 16, pp.3263-3283 20. Караев В.Ю., Каневский М.Б., Мешков Е.М., К.Чу, «Восстановление дисперсии наклонов крупномасштабного волнения по данным PR радиолокатора», Восьмая всероссийская открытая конференция "Современные проблемы дистанционного зондирования Земли из космоса", Москва, ИКИ РАН, 15-19 ноября 2010, Тезисы докладов, с. 186 21. В.Караев, М.Панфилова, Г.Баландина, К.Чу, «Восстановление дисперсии наклонов крупномасштабных волн по радиолокационным измерениям в СВЧдиапазоне», Исследование Земли из космоса, 2012, N 4, 62-77 22. V.Karaev, M.Meshkov, X.Chu, Simulation of radar with knife-like antenna beam using precipitation radar data, International Journal of Remote Sensing, 2013, v. 34, N 22, pp. 7906-7924, http://dx.doi.org/10.1080/01431161.2013.827811 20 23. Караев В., Е.Мешков, X.Chu, Y.He, «Применение данных радиозондирования в сантиметровом диапазоне длин волн для имитации натурных измерений обратного рассеяния радиолокатором с ножевой диаграммой направленности антенны», Известия ВУЗов, сер. Радиофизика, 2011, т. 54, N 12, стр. 891-907 24. Wide-Swath Altimetric measurement of Ocean surface topography, ed. Lee-Lueng Fu, 2003, JPL-Publication 03-002, p. 68 25. Fjørtoft, R. ; CNES, Toulouse, France ; Gaudin, J.-M. ; Pourthie, N. ; Lion, C., KaRIn - the Ka-band radar interferometer on SWOT: Measurement principle, processing and data specificities, Proc. Of IGARSS’ 2010, pp.4823 – 4826. 21 8. АС АФАР ДН КА КК КЭ ЛЧМ МКС НА ПЧ РЛИ РСА СВЧ ПЕРЕЧЕНЬ УСЛОВНЫХ СОКРАЩЕНИЙ И АББРЕВИАТУР – антенная система; – активная фазированная антенная решетка; – диаграмма направленности; – космический аппарат; – космический комплекс; – космический эксперимент; – линейная частотная модуляция; – международная космическая станция; – научная аппаратура; – промежуточная частота; – радиолокационное изображение; – радиолокатор с синтезированной апертурой; – сверхвысокие частоты. 22