2.4.3.2.Уточнение спецификации статистической модели
advertisement

51
Глава 2. Экономико-статистические методы прогнозирования
2.1. Особенности эконометрических методов прогнозирования
Диапазон
поведения
понятия
«эконометрические
социально-экономических
объектов
методы»
часто
в
исследованиях
весьма
широк
и
простирается от понимания под ними только лишь части набора математико статистических средств исследования до всего, что связано с измерениями в
экономике. В этой связи будем иметь в виду, что эконометрика - это
прикладная область междисциплинарных исследований. Она объединяет
совокупность теоретических результатов, приемов, методов и моделей,
предназначенных для того, чтобы на базе экономической теории (в том числе –
математической
экономики),
экономической
статистики,
экономико-
статистического инструментария (методы и их программная реализация)
придать
конкретные
количественные
выражения
общим
качественным
закономерностям, обусловленным экономической теорией и повседневной
экономической
практикой
[3].
Следует
отметить,
что
понятие
«эконометрические методы анализа и прогноза» включает в себя не только весь
спектр
экономико-статистических
методов,
как
основу
рабочего
инструментария, хотя их лидирующая и определяющая роль бесспорна, но и
аппарат математического анализа, частично методы прикладной статистики,
эвристические методы и др.
Таким образом, в самом общем виде эконометрическая модель – это
дескриптивная модель исследуемого объекта, в структуре которой можно
различать экзогенные и эндогенные переменные, а также управляющие
(инструментальные) параметры либо переменные (в методиках активного
прогнозирования).
Под экзогенными переменными модели будем понимать внешне
задаваемые, автономные по отношению к модели переменные, иногда они
носят название объясняющих. Часть из них может носить наименование
52
управляющих в соответствии с функциями, отводимыми им в исследованиях.
Посредством
управляющих
переменных
осуществляется
«настройка»
прогнозирующей модели, т.е. реализуется активная функция прогноза,
разрабатываемого на основе эконометрических методов.
Более общим понятием является «предопределенная переменная».
Множество предопределенных переменных эконометрических моделей, кроме
всей совокупности экзогенных переменных включает все их временные
производные характеристики, а также все множество лаговых (отнесенных на
более раннее время) эндогенных переменных.
К эндогенным переменным относят те, которые формируют свое
значение
под
воздействием
предопределенных
переменных,
внутри
функционирующей модели. Часть из них и является целевым объектом
исследования в рамках эконометрической модели прогноза.
Следует заметить, что понятие «научный прогноз» предполагает
существование в сфере социально-экономических взаимодействий общества
неких объективных законов развития, что выражается в наличии в рамках
изучаемых систем свойства инерционности, т.е. неизменности ряда параметров
развития. В этой связи, безусловно, ключевая роль в обосновании прогнозов на
основе
эконометрического
моделирования
принадлежит
экономико-
статистическим методам.
Инерционность в социально-экономических процессах может проявлять
себя двояко: через инерционность характера динамики процесса (направление,
темпы развития, колеблемость ряда показателей и т.д.), а также через
инерционность
взаимосвязей,
т.е.
механизма
формирования
явления.
Признание у социально-экономических объектов свойства инерционности, а
также возможность оперировать с большими объемами эмпирической
информации
об
объекте
и
предполагает
возможность
использования
экономико-статистических методов с целью обоснования прогноза. Ибо
согласно
определению
математических
«экономико-статистическая
соотношений,
описывающая
модель
некоторый
–
система
экономический
53
объект, процесс или явление, параметры которой определяются (оцениваются)
на основе фактических данных с помощью статистических методов» [56, с.274].
Особо следует отметить, что практическая возможность применимости
методов
статистического
(вероятностно-статистического)
моделирования
исходит из признания гипотез о наличии в реальной действительности, вопервых, свойства многократной воспроизводимости наблюдений над объектом
в одних и тех же условиях функционирования; во-вторых, присутствием
большого числа случайных факторов в системе. Первое свойство доказывает то,
что данный инструментарий пригоден для отражения в рамках изучаемого
объекта свойства инерционности. Второе – говорит о вероятностной природе
сделанного данным инструментарием прогноза.
Однако прежде чем делать утверждение об адекватности выбранного
инструментария прогнозирования характеру исследуемого объекта, а также
эффективности
прогностических
свойств
полученной
экономико-
статистической модели, следует быть уверенным в обоснованности исходных
гипотез и концептуальных построений, лежащих в основе модели объекта, с
одной стороны. А с другой, иметь в наличии необходимый состав
экономической
информации,
отражающей
реальный
процесс
функционирования рассматриваемой системы. Таким образом, исходный
статистический
инструментарий
необходимо
дополнить
знаниями
экономической теории, а также экономической статистики. Все это говорит за
то, что в определенных условиях реальной экономической жизни аппарат
эконометрического прогнозирования может быть достаточно эффективным
средством обоснования прогнозной информации. Хотя, строго говоря,
особенности информационного представления практики функционирования
социально-экономических объектов требуют еще более специальных методов
ее обработки, прежде всего связанных с аппаратом прикладных статистических
исследований.
54
Традиционные
используемые
в
формализованные
рамках
классического
методы
прогнозирования,
эконометрического
подхода,
подразделяются на три группы:
1) методы анализа и прогноза временных рядов (множество методов и
алгоритмов сглаживания рядов);
2) методы прогнозирования на основе факторных регрессионных моделей
(совокупность
методов
отражения
принципа
максимального
правдоподобия, а также их адаптационные настройки);
3) прогнозирование на основе собственно эконометрических методов и
моделей (методы решения систем одновременных уравнений).
Данная триада образует основной блок обоснования и построения
прогноза, основанного на базе эконометрических методов.
Всякий эконометрический анализ опирается на исходные статистические
данные. Общими чертами для всех методов прогнозирования, использующих в
качестве рабочего инструментария эконометрические методы, является работа
в подавляющем большинстве случаев с фактографической информацией, т.е.
информацией, имеющей своим источником фактические данные. Различают
три формальных способа ее представления в практике исследования:
- временные ряды (time-series data);
- пространственные данные (cross-section data);
- данные панельных исследований (panel data).
Независимо от того, производится ли исследователем выбор метода и плана
статистического обследования или он уже располагал результатами текущего
наблюдения над объектом исследования, но к моменту определения основного
инструментария статистического исследования, в общем случае, у аналитика
имеется в качестве массива исходных статистических данных матрицами
наблюдений вида:
x1(1) (t )
(1)
x (t )
X 2
x (1) (t )
n
x1( 2 ) (t ) x1( m ) (t )
x 2( 2 ) (t ) x 2( m ) (t )
, или Х= ( xi( j ) (t ) ), i 1, n , j 1, m , t 1, N , где
( 2)
(m)
x n (t ) x n (t )
55
xi( j ) (t )
–
значение
анализируемого
j-го
признака
(показателя),
характеризующего состояние i-го объекта (процесса) наблюдения в момент
времени t. Такое самое общее представление данных об объекте социальноэкономического прогнозирования носит название панели данных.
Если зафиксировать номер переменной j и номер статистически
обследуемого объекта i, то расположенную в хронологическом порядке
последовательность
значений
x ij (t ), x ij (t ),..., x ij (t )
называют
одномерным
временным рядом динамики j-го показателя на i-м объекте исследования или
Х=х(t) при t 1, N . Хотя в общем случае динамический ряд имеет более общий
смысл. И фиксация событий может быть не только временной, но и например
пространственной [4, 83]. Если же одновременно рассматривать динамику рпризнаков из всего множества J возможных характеристик объекта на
фиксированном
объекте
i,
тогда
говорят
о
статистическом
анализе
1
2
p
Т
многомерного временного ряда X (t ) ( x (t ), x (t ),..., x (t )) , где p J .
Если же исходный набор данных представлен в виде Х = ( x i( j ) ), то говорят об их
пространственном представлении.
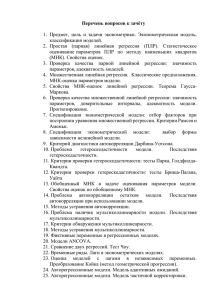
Порядок
проведения
прогнозных
исследований
на
любой
эконометрической модели, безусловно, укладывается в рамки общей процедуры
социально-экономического прогнозирования, представленной на рис.1. Однако
каждый
из
классов
эконометрических
методов
прогнозирования
характеризуется отличной от других гипотезой, объясняющей генезис
динамики ряда, а, следовательно, и различными принципами построения
модели генератора прогнозной информации, а также несет некоторую
специфику в содержании блоков 2-5 обобщенной схемы процесса научного
прогнозирования. С учетом общей специфики аппарата, а также особенностей
представления исходной информации расшифруем содержание блоков 2-5
рисунка 1, применительно к понятиям эконометрического моделирования и
прогнозирования на основе экономико- статистических методов.
2. Изучение информации по объекту прогнозирования
56
2.1. Поиск и сбор данных
2.2. Априорная оценка информации
- тип;
- шкала и метод представления;
- оценка объемов и структуры выборки
2.3. Корректировка отобранных данных
- обнаружение «повреждений» и особенностей;
- восстановление;
- предмодельная подготовка;
- изучение статистических свойств набора
2.4. Формальное тестирование наличия
причинно-следственных связей
2.4. Формирование обучающей и тестовой выборки
3. Выбор
метода
прогнозирования
(Концептуальный
дизайн
прогнозирования)
3.1. Формулировка исходных гипотез/теорий
3.2. Определение допустимых классов
аппроксимирующих функций
3.3. Параметризация модели объекта
3.4. Обоснование метода реализации модели
4. Конструирование генератора прогнозной информации
4.1. Идентификация генератора
- построение множества оценок модели объекта;
- корректировка множества моделей
(формально-логический анализ,
критерии статистической пригодности)
4.2. Проверка прогностической пригодности генератора
- построение критериев оценки прогностической способности;
- корректировка допустимого множества прогнозных моделей
4.3. Обоснование окончательного вида генератора прогноза
модели
57
5. Получение прогнозной информации
5.1. Уточнение характеристик генератора
- оценка параметров модели на всем исходном наборе данных;
- оценка статистической допустимости модели;
- принятие решения о возможности использования модели
5.2. Планирование и осуществление прогноза
- оценка прогноза экзогенных переменных модели;
- прогноз эндогенных переменных модели
2.2. Методы оценки качества эконометрических прогнозов
Важнейшим этапом в проведении любого полноценного прогнозного
исследования является оценка качества построенного предсказания. В этой
связи следует четко представлять себе ответы на вопросы о том, что такое
качество прогноза и как, с помощью чего его измерить. Сама постановка этой
вполне очевидной проблемы на самом деле вполне может перечеркнуть само
желание заниматься разработкой научного обоснования прогнозов, т.е. их
методологической и методической базой. Основная ловушка состоит в том, что
согласно известному позитивистскому постулату о практике как основном
критерии истинности, в том числе и научного исследования, мы не в состоянии
дать окончательное заключение относительно корректности выбранного
инструментария, пока ожидаемый факт не станет свершившимся. А последнее,
по сути, уничтожает и собственно предмет исследования. Выходом из тупика
является только лишь признание того факта, что прогнозированию поддаются
лишь
систематически
ранее
наблюдаемые,
типизируемые
объекты,
инерционность развития которых предположительно сохраниться и будущем.
Определение понятия «качество прогноза» требует предварительного
понимания сути совокупности некоторых дополнительных понятий, таких как
обоснованность, достоверность, точность, ошибка прогноза, а также источники
ошибок прогноза. Дадим определение данной терминологии, в основном
опираясь на ее общепринятую интерпретацию [50].
58
Обоснованность прогноза – подразумевает степень соответствия методов
и
исходной
предпрогнозной
информации
объекту,
целям
и
задачам
прогнозирования. Является следствием принципа научности прогноза.
Достоверность
(надежность)
прогноза
–
определяет
вероятность
реализации соответствующей прогнозной оценки для заданного доверительного
интервала (уровень значимости прогноза).
Точность прогноза (эмпирическая и априорная) – мера соответствия
прогнозируемой величины фактическому ее значению. Иногда допускается
следующее определение – оценка доверительного интервала прогноза для
заданной
вероятности
его
осуществления.
Следует
отметить,
что
характеристики точности и надежности являются сопряженными. Чем выше
надежность прогноза, тем ниже его точность и наоборот.
Основным измерителем меры точности прогноза является его ошибка.
Иногда понятие «ошибка прогноза» трактуется более концентрированно, как
апостериорная величина отклонения прогноза от действительного состояния
объекта или путей и сроков его достижения.
По характеру своего появления ошибки разделяют на систематические и
случайные. По методам их отражения – на количественные и качественные
методы фиксации ошибок. В свою очередь по способу расчета количественные
ошибки могут быть абсолютными, относительными, сравнительными.
В общем, понятие «качество прогноза» в широком смысле слова
представляет
собой
единство
прогнозных
параметров
обоснованности,
достоверности, точности, типизации ошибок прогноза, а также выявление
источников ошибок прогноза. Узкое толкование этого термина подразумевает
некую меру устойчивого развития объекта в соответствии с траекториями,
определяемыми прогнозом и чаще всего описывается мерами фиксации
точности прогнозирования, т.е. непосредственно ошибками прогноза. Заметим
также, что оценивание качества прогноза может носить как априорный
(предварительный), так и апостериорный (фактический, эмпирический)
характер.
В
соответствии
с
последней
градацией
применительно
к
59
эконометрическим моделям различают так называемые характеристики
качества информационной пригодности модели и ее прогностической
пригодности.
Характеристики информационной пригодности эконометрической модели
Характеристики
качества
информационной
пригодности
эконометрической модели, как впрочем, и любой другой, описывают, на
сколько достоверно выбранная в качестве генератора прогноза модель
отражает, объясняет ретроспективу исследуемого явления. В этом смысле мы в
целом можем утверждать, что чем точнее построенная модель объясняла
прошлое, тем больше наши надежды на то, что она будет удачно предсказывать
будущее. Следовательно, к оценочным характеристикам априорного качества
прогнозной модели нам следует отнести всю совокупность показателей
качества построения эконометрической модели. Отметим важнейшие из них [1,
19, 25, 31, 74, 80, 83], взяв за основу следующие обозначения:
yt - фактическое значение показателя на t-й момент времени;
ŷt - модельное значение показателя на t-й момент времени;
n - количество ретроспективных наблюдений;
k – число параметров объясняющей модели.
Средняя наблюдаемой величины у:
n
y
yt
t 1
n
.
Абсолютная модельная ошибка (модельный остаток): еt у t yˆ t .
Абсолютное отклонение от средней: еt у t y t .
n
2
2
Вариация переменной у: var( y) Q y (у t y t ) .
t 1
n
2
2
Вариация остаточная: var(e) Q ( у t yˆ t ) .
t 1
n
2
2
Вариация модельная (регрессии): var( yˆ ) Q yˆ (уˆ t y t ) .
t 1
60
n
e t2
2
t 1
Оценка дисперсии модели: s n k .
n
et2
2
t 1
Стандартная (стандартизированная) ошибка модели: s s n k .
1 n 2
et
n t 1
1 2
Qyˆ Q 2
yˆ
2
n
2
2.
Коэффициент детерминации (критерий R ): R 1 1 n
1 2 Qy
Qy
( yt yt ) 2
n
n t 1
1 n 2
et
n k t 1
1
Q y2ˆ
Исправленный коэффициент детерминации: R 2 1
.
nk
1
1 n
2
2
( yt yt ) n 1 Q y
n 1 t 1
n
e
Информационный критерий Акаике (АIC): AIC exp( 2k / n) t 1
2
t
n
.
n
Информационный критерий Шварца (SIC): SIC n
Расчетное значение F-статистики: F
Qy2ˆ / k
Qy2 /( n k )
e
2
t
k
n t 1
.
n
.
Характеристики прогностической пригодности эконометрической модели
Абсолютные показатели ошибки прогноза позволяют количественно
определить величину расхождения прогноза и факта в единицах измеряемого
показателя. Будем различать следующие характеристики.
Абсолютная ошибка прогноза: t уt уˆ t , где
yt - фактическое значение показателя на t-й момент времени;
ŷt - прогнозное значение показателя на t-й момент времени.
n
Средняя абсолютная ошибка прогноза:
n – период упреждения прогноза.
y
t 1
t
n
yˆ t
, где
61
n
(y
Среднеквадратическая ошибка прогноза:
t 1
t
yˆ t ) 2
n
.
Значения все вышеперечисленных показателей зависят от масштаба
измерений, который в ряде случаев, в частности при межобъектных
сопоставлениях, уменьшает объективность оценок, для того, чтобы избежать
этого используют относительные показатели измерения ошибки прогноза,
выраженные либо в долях единицы, либо в процентах.
Относительная ошибка прогноза: t
yt yˆt
yt
100% .
1 n y t yˆ t
100% .
Средняя относительная ошибка прогноза:
n t 1
yt
p
Доля исполнения прогнозов: p q , где
p – доля подтвердившихся прогнозов;
q - доля не подтвердившихся прогнозов.
Коэффициенты несоответствия (коэффициенты Тейла):
n
1).
KT
(y
t 1
t
yˆ t ) 2
n
yt2
;
t 1
n
2).
KT
(y
t 1
n
t
yˆ t ) 2
n
yt2 yˆ t2
t 1
.- данная форма коэффициента Тейла наиболее
t 1
распространена на практике, и если не делается специальных оговорок, то по
умолчанию используется именно она. Следует добавить, что на практике в ряде
случаев исследования объектов прогнозирования и их динамики более
эффективными методами оценки точности прогнозов является исчисление
коэффициентов несоответствия Тейла в приростах исследуемого показателя yi.
62
Не трудно видеть, что «совершенный прогноз» имеет коэффициент Тейла
равный 0.
Иногда для определения точности прогноза применяют сравнительные
методы. Так в формулах коэффициентов несоответствия Тейла вместо значения
прогнозного показателя - ŷt , может стоять его желаемое значения, некий
«эталон». Примером другого подхода можно назвать расчет коэффициента
корреляции между прогнозируемыми значениями показателя и фактическими
его значениями на периоде упреждения прогноза.
R yˆy
cov( yˆy)
yˆ y
, где
cov( yˆ y ) - коэффициент квариации прогнозных и фактических значений
переменных на отрезке периода упреждения;
yˆ ; y - стандартные ошибки прогнозного и фактического рядов на отрезке
периода упреждения.
Однако при анализе и интерпретации последнего показателя не следует
забывать
о
специфике
истолкования
значений
коэффициента
парной
корреляции.
Качественные способы оценки точности прогноза весьма многочисленны,
но по частоте использования бесспорным лидером в анализе является
построение диаграммы «прогноз-реализация». Данный метод состоит в
следующем.
1. На координатной плоскости «прогноз-реализация» наносится «облако»
прогноза (координаты могут наноситься в их абсолютных значениях, но
рекомендуется
использование
процентных
либо
приростных
характеристик рядов).
2. Визуально осуществляется анализ формы распределения относительно
линии «идеальных» прогнозов.
63
2.3. Моделирование и прогноз временных рядов
2.3.1. Особенности представления и моделирования
временных рядов
Разнообразные содержательные задачи экономического анализа требуют
использования
статистических
данных,
характеризующих
исследуемые
экономические процессы и развернутые во времени в форме временных рядов.
При этом нередко одни и те же временные ряды используются для решения
различных по постановке и содержанию проблем.
Временные ряды или, как их еще называют динамические ряды один из
самых распространенных объектов изучения эконометрического анализа и
прогноза.
В
экономических
них
наиболее
объектов
и
концентрировано
явлений,
позволяя
отражаются
изменения
достаточно
тщательно
проанализировать особенности развития. Фактически, временной ряд — это
множество последовательных наблюдений, упорядоченных во времени по
уровням состояния либо изменения некоторого изучаемого явления.
Таким образом, ряд наблюдений y(t1 ), y(t2 ),..., y (t N ) (или y1, y2 ,..., yN ),
анализируемой случайной величины (t ) , произведенных в последовательные
моменты
времени
t 1 , t 2 ,..., t N называется
временным
рядом.
Примем
следующее обозначение, пусть yt – значение временного ряда в t-м такте
времени, N – число наблюдений.
Определение временного ряда опирается на понятие случайной величины
(t ) , зависящей от параметра t, интерпретируемого как время. То есть, по
существу, речь идет об однопараметрическом семействе случайных величин
(t ).
64
Принципиальные отличия временного ряда от последовательности
наблюдений
y1, y2 ,..., yN
образующих случайную выборку состоят в
следующем:
- в общем случае, исходя их своей природы, члены временного ряда не
являются статистически независимыми, в отличие от элементов
случайной выборки;
- члены временного ряда не являются одинаково распределенными, т.е.
Py(t1 ) y Py(t2 ) y при t 1
t 2 (по указанной выше причине).
Отмеченные нарушения в распределении элементов динамических рядов ведет
к тому, что свойства, и правила статистического анализа случайной выборки не
могут быть в полной мере распространены на временные ряды. С другой
стороны,
взаимозависимость
членов
временного
ряда
создает
свою
специфическую базу для построения прогнозных значений анализируемого
показателя, т.е. для построения оценок
зарегистрированным значениям
yˆ N l для неизвестных значений y N l по
y1, y2 ,..., yN , где l –период упреждения
прогноза.
Как правило, уровни временного ряда в экономике отражают значения
какого-либо показателя на определенный момент времени (моментные
наблюдения) либо за какой-то промежуток (интервальные наблюдения). Если
время, через которое проводится очередное измерение величины, квантуется на
равные промежутки времени (такты, шаги), то ряд называется полным
дискретным рядом, если принцип равных интервалов не соблюдается – ряды
именуют неполными. Примером такта полного дискретного временного ряда
экономического показателя может быть день, неделя, месяц и так далее.
В
дальнейшем,
если
не
будет
специально
оговорено,
будут
рассматриваться именно полные дискретные временные ряды показателей,
представленных в интервальной шкале. По форме представления информации,
данные ряды могут содержать абсолютные, относительные и средние
величины.
65
Каждый временной ряд Qt (t 0, N ) может характеризоваться средним
значением ряда, а также усредненным отклонением от него (фактическая
оценка
дисперсии
ряда).
Динамика
временного
ряд
для
некоторого
экономического показателя, т.е. изменение этого показателя во времени может
быть оценена абсолютным приростом, темпом роста и темпом прироста.
Названные характеристики динамического ряда вычисляются при постоянной и
переменной базе и называются, соответственно, базисными и цепными.
Приведем формулы для расчета показателей изменения динамического
ряда.
1. Абсолютные приросты (абсолютные изменения уровней) – это разность
между сравниваемым уровнем показателя и его значением в предшествующий
момент времени, выбранный за базу сравнения:
базисный:
t / 0 Qt Q0 ;
цепной:
t / t 1 Qt Qt 1 ;
N
средний:
t 1
t / t 1
N
(Qt Q0 ) / N .
2. Темпы роста – отношение сравниваемого уровня показателя показателю,
принятому за базу сравнения:
базисный:
t / 0 Qt / Q0 ;
цепной:
t / t 1 Qt / Qt 1 ;
средний:
N
N
t / t 1
N N / 0 N Q N /Q 0 .
t 1
3. Темпы прироста (относительный прирост) – это отношение абсолютного
изменения к уровню базисного периода:
базисный:
rt / 0 (Qt Q0 ) / Q0 ;
цепной:
rt / t 1 (Qt Qt 1 ) / Qt 1 .
66
Для более полной характеристики динамических рядов применяются
дополнительные показатели, представленные ниже для дискретных временных
рядов:
- абсолютное ускорение: t t 1 / t t / t 1 - разность между абсолютным
изменением заданный период и абсолютным изменением за предыдущий
период той же продолжительности;
- относительное ускорение: t t / t / t 1 .
Изучение прогностических возможностей моделей временных рядов чрезвычайно
важная
составляющая
всего
инструментария
экономико-
математического моделирования и прогнозирования ввиду их чрезвычайной
распространенности
в
экономике.
Так
как
прогнозирование
значений
соответствующих экономических показателей на основе доступных к моменту
времени t = N наблюдений временного ряда yt
на один или несколько
временных тактов вперед может явиться основой для
- обоснования стратегических решений во всех сферах бизнеса, а также
государственного управления;
- планирования тенденций различных масштабов, уровня иерархии,
срочности в экономике, производстве, торговле и т.д.;
- управления
и
оптимизации
социально-экономических
процессов,
протекающих в обществе;
- управления важными параметрами демографических и экологических
процессов;
- обоснование среднесрочных и оперативных решений в бизнесе и
государственном управлении и др.
Начиная изучение особенностей модельного представления динамических
рядов, мы будем исходить из того, что большинство объектов исследования,
т.е. социально-экономических показателей формируется под воздействием
огромного
множества
–
главных
и
второстепенных,
объективных
и
субъективных, прямых и косвенных тесно взаимосвязанных друг с другом и
67
часто действующих в различных направлениях тенденций. Вследствие этого
при анализе динамики временных рядов исходят из априорной гипотезы о
наличии
в
них
двух
основных
компонент:
детерминированной
(систематической, неслучайной) и стохастической (случайной), причем
изменение последней оценивают с некоторой вероятностью.
К основным исследовательским задачам анализа временных рядов
следует отнести:
- определение состава неслучайных составляющих временного ряда;
- построение удовлетворительных оценок для неслучайных функций,
присутствующих в разложении;
- подбор модели, адекватно описывающей поведение случайных остатков
t, и статистически оценить параметры этой модели.
Успешное
решение
перечисленных
задач,
является
основой
для
достижения конечных прикладных целей исследования и, в первую очередь,
для решения задачи кратко- и среднесрочного прогноза значений временного
ряда.
Таким образом, задача прогнозирования временных рядов состоит не
только в выделении детерминированной части в развитии процесс, но в оценке
и предсказании случайных отклонений от тенденции.
В общем случае модель временного ряда имеет следующий вид:
yt f (t ) t ,
где - f (t ) систематическая составляющая ряда;
- t случайная составляющая ряда с нулевым математическим ожиданием
M [ t ] 0 и дисперсией D[ t ] 2 .
Детерминированная составляющая временного ряда в зависимости от типа
факторов, под влиянием которых она формировалась. В общем случае такого
рода составляющие в практике эконометрических исследований различают
трех видов.
68
Долговременная
(вековая)
составляющая,
формирующая
общую
в
длительной перспективе тенденцию в изменении анализируемого признака yt .
Обычно эта тенденция описывается с помощью той или иной неслучайной
функции - f ТР (t ) как правило, монотонной. Эту функцию называют функцией
тренда или просто — трендом.
Сезонная составляющая – s (t ) , формирующаяся под влиянием сезонных
колебаний экономического показателя в течение заданного периода времени,
обычно года.
Циклическая
(конъюнктурная)
оставляющая
–
c (t ) ,
формирующая
изменения анализируемого признака в связи с действием долговременных
циклов экономической, демографической или астрофизической природы
(волны Кондратьева, демографические «ямы» и пики, циклы солнечной
активности и т.п. [3]).
Естественно, что перечислить все факторы, которые прямо или косвенно
оказывают влияние на интересующий нас показатель, мы не можем, хотя бы
просто потому, что их бесконечно много. Именно с этим связывают
возникновение стохастической (случайной) составляющей временного ряда,
она является предметом серьезных исследований.
Очевидно, что в процессе формирования значений каждого временного ряда
не обязательно участвуют одновременно факторы всех четырех типов. Однако
во
всех
случаях
предполагается
непременное
участие
случайных
(эволюционных) факторов t . В научной литературе их также именуют «белым
шумом», в отличие от простых остаточных компонент исследуемого ряда. В
дальнейшем мы подробнее рассмотрим его свойства.
Таким образом, в самом общем виде структуру любого временного ряда
можно представить в виде разложения:
yt 1 fТР (t ) 2 s(t ) 3c(t ) (t ), t 1, N
где
1
0
j
(2.3.0),
, подразумевая при этом, что единица учитывает участие j-го
69
фактора в формировании детерминированной составляющей временного
ряда yt , j 1,3 , , а нулевое значение параметра отражает факт его отсутствия.
Окончательные выводы о том, участвуют или нет факторы данного типа в
формировании значений yt , могут базироваться как на анализе содержательной
сущности задачи, т.е. быть априорно экспертными по своей природе, так и на
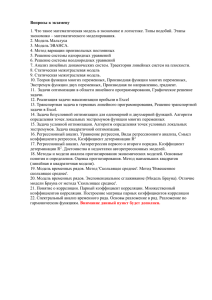
специальном статистическом анализе исследуемого временного ряда. Состав
основных этапов общей процедуры прогноза на основе моделей временных
рядов можно увидеть на рис.2
В связи с этим, исходя из приведенного выше аддитивного разложения
временного ряда yt , можно сформулировать основные этапы построения
генератора прогнозной информации с целью предсказания динамики ряда
социально-экономических показателей следующим образом:
- определить, какие из детерминированных составляющих присутствуют в
исследуемом временном ряду;
- определить оценки параметров моделей обнаруженных во временном
ряду;
- для остатков, получившихся как результат разности фактических уровней
ряда и значений, моделируемых детерминированной составляющей,
выбрать модель, адекватно описывающую поведение этих остатков;
- получить прогноз на построенной модели временного ряда.
Каждый
из
этапов
предполагает
трудоемкие
исследования
статистических данных и проверки статистических гипотез, с целью выявления
в них наличия или отсутствия тех или иных свойств и обоснования выбора
окончательного типа модели, позволяющей эффективно решить задачи краткои среднесрочного прогноза значений временного ряда.
70
1. Выявление проблемы
2. Поиск и сбор данных
12. Сезонность или
цикличность
обнаружена?
3.Качественная и
количественная оценка
временного ряда
13. Идентификация компонент
сезонности и цикличности
4. Результат
удовлетворяет?
14.Информационная
пригодность
удовлетворительна?
5. Тренд
присутствует?
15. Прогностическая
способность
удовлетворительна?
6. Построение модели
временного ряда
7. Информационная
пригодность
удовлетворительна?
16. Окончательный выбор
модели остатков
17. Тестирование остатков
8. Прогностическая
способность
удовлетворительна?
18. Построение окончательной
формы прогностической модели
19. Задание переменной
управления
9. Окончательный выбор модели
тренда
10. Центрирование
данных
20. Построение точечного и
интервального прогноза
11. Тестирование остатков ряда
на сезонность и цикличность
Рисунок 2. Состав основных этапов общей процедуры прогноза на основе
моделей временных рядов.
71
2.3.2. Основы тестирования временных рядов
Согласно общей методике анализа временных рядов исходным
моментом в построении модели прогнозирования является определение
возможности
вычленения
в
структуре
ряда
его
систематической
составляющей и, прежде всего трендовой. В связи с этим исследователь
должен определить:
a) присутствует ли во временном ряду долговременная тенденция;
b) если тенденция обнаруживается, какой характер она имеет;
c) какие
дополнительные
закономерности
прослеживаются
в
динамических рядах.
Ответить сразу на все вопросы можно попытаться визуально,
проанализировав графическое представление распределения изучаемого
показателя во времени, например на экране дисплея компьютера. Этот способ,
безусловно, привлекателен, однако также, безусловно, субъективен, так как
напрямую зависит от масштаба представления информации на экране, а так
же характера восприятия этой информации субъектом.
Другим вариантом является метод исчисления последовательных
разностей в уровнях исследуемого ряда. Расчет ведется пока разности
практически не сравняются. В этом случае порядок исчисляемых разностей
принимается за степень аппроксимирующего полинома. Однако понятно, что
основным недостатком названного подхода является возможность подбора
кривой описываемой только лишь многочленами, что мало привлекательно
для практических исследований. В некоторых случаях, при исследовании
временного ряда на наличие долговременных тенденций, полезным может
оказаться изучение не только абсолютного цепного прироста, но и
абсолютных ускорений в ряду.
Однако наиболее распространенным в практике тестирования рядов на
наличие тенденций является использование статистической проверки гипотез
72
о неизменности тенденций по ряду. Если формулировать более строго следует
проверить ряд на случайность распределения. Наиболее часто используемыми
в этих целях являются: t-критерий, критерий Аббе, критерий серий,
основанный на медиане выборки, критерий «восходящих» и «нисходящих»
серий, смежный с последним метод Фостера-Стюарта и др [3, 31, 32, 49, 56,
70].
Проверка гипотезы о постоянстве средних значений ряда на основе tкритерия Стьюдента
Процедура проверки гипотезы о постоянстве средних значений по двум
выборкам ряда определяется предположением относительно дисперсии
распределения. Пусть имеются две выборки:
x1i , i 1, n и x2 j , j 1, n .
Предполагаем, что они получены из одной и той же генеральной
совокупности. Проверим гипотезу о равенстве средних по выборкам (иногда
гипотеза формулируется, как равенства нулю разницы между средними). На
практике для проверки гипотезы о двух средних нормальных генеральных
совокупностей используется t-критерий Стьюдента. Однако математические
выражения для вычисления t-критерия будут различны при различных
гипотезах относительно имеющиеся данных о дисперсии по выборкам [3, 23,
31, 39, 40, 49 и др.].
Для общего описания проверочных и расчетных статистик введем
следующие общие обозначения. Пусть
xi ,
xi - математические ожидания и дисперсии величины х генеральных
совокупностей соответственно i=1,2;
0 - заданную постоянную величину;
2
хi , s i - выборочные средние и дисперсии;
- число степеней свободы;
ni – величина I-й выборки;
73
H0 – формулировка основной тестовой гипотезы;
H1 – формулировка альтернативной тестовой гипотезы;
Сформулируем несколько вариантов проверочных гипотез.
Вариант 1:
H 0 : x 2 0, H1 : x 2 0
Пусть хi - оценка
x2
и полагаем n1=1. Вычисляем t-статистику:
x 2 0
t
s2
n2 ,
степень свободы n2 1 .
Вариант 2:
H 0 : x1 x 2, x21 x22 и H 1 : х1 х 2
Вычисляем t-статистику:
t
x 2 x1
1
, где
s
1 / n1 1 / n2
(n1 1) s12 (n2 1) s 22
,
n1 n2 2
s
степень свободы n1 n2 2
Вариант 3.
H 0 : x1 x 2, x21 x22 и H 1 : х1 х 2
Вычисляем t-статистику:
t
x2 x1
s12 / n1 s 22 / n2
,
степень свободы
( s12 / n1 s 22 / n2 ) 2
2
, где
2
2
2
( s1 / n1 ) /( n1 1) ( s 2 / n2 ) /( n2 1)
74
[x] – целая часть числа х, значение округлено.
Вариант 4:
H 0 : x1 x 2, никакого предположения о 2 , n1 n2 H 1 : х1 х 2 .
Вычисляем t-статистику:
t y n2 / s y ,
где
y x 2 x1 ,
n2
sy
степень свободы
(x
i 1
2i
x1i y ) 2
n2 1
,
n2 1.
В условиях справедливости гипотезы Н0 статистика критерия t подчинена
t-распределению Стьюдента с степенями свободы. Если t p t1 / 2 ( ) , то
гипотеза о равенстве средних двух нормальных генеральных совокупностей
отвергается, в противном случае гипотеза принимается.
Из приведенных выше соображения ясно, что практически всегда для
исследователя
необходимы
дополнительные
исследования
свойства
однородности двух выборок. Для этого чаще всего рекомендуется применять Fкритерий Фишера или Кокрена.
Проверка однородности двух выборок на основе F-критерия Фишера
Пусть в условиях рассматриваемых ранее двух выборок сформулированы
нулевая и альтернативная гипотезы:
H 0 : 12 22
H 1 : 12 22
75
Рассчитаем F-критерий (для больших и очень больших объемов выборок,
n1,n2>100).
s2 s1
Fp
s12
s22
2n1 2n2
Статистика F в условиях справедливости гипотезы Н0 подчинена
нормальному распределению N(0,1).
Если F p Fкр , то мы принимаем нулевую гипотезу, т.е. принимаем
гипотезу об однородности ряда.
Проверка однородности выборок на основе критерия Кокрена
Н0 :
значения
Н1 : 1
2
дисперсии
неизвестны
и
12 ... к2 2
... к2 2 .
Критерий Кокрена применяется при одинаковых объемах выборок, т.е.:
n1=…nk=n.
Статистика критерия Кокрена для проверки гипотезы Н0 при заданном
уровне значимости имеет вид
2
smax
G 2
s1 ... sk2
2
smax
max {si2 }
i
Вычислим
G з (k , )
F1 / k ( , (k 1) )
k 1 F1 / k ( , (k 1) )
n 1 .
Если вычисленное значение статистики Кокрена G p G1 / k ( k , ) , то
гипотеза о равенстве дисперсий отвергается.
76
Критерий квадратов последовательных разностей (критерий Аббе)
Если есть основания полагать, что случайный разброс наблюдений
х(1) , х( 2 ) ,..., х( n )
относительно
своих
средних
значений
подчиняется
нормальному закону распределения вероятностей, то для выяснения вопроса о
возможном систематическом
обследования
смещении
целесообразнее
среднего
воспользоваться
в ходе
выборочного
критерием
квадратов
последовательных разностей.
Н0: Мx(t) = a = const , Н1: Мx(t)
const
По имеющейся выборке хi, I=1…n, оценим 2 двумя способами. Сначала
рассмотрим несмещенную оценку:
1 n
s
( xi x) 2
n 1 i 1
2
Во втором способе для оценки 2
d2
d2
примем величину
, где
2
1 n
( xi 1 xi ) 2
n 1 i 1
x
1 n
xi
n i 1
Для проверки гипотезы с помощью данного критерия подсчитываем
величину
Если окажется, что
(n)
d2 /2
2
s
( n ) min ( n ) , то Н0 отвергается. При этом величина
min ( n ) для n>60 подсчитывается по формуле
min ( n ) 1
где
u
n 0.5(1 u2 )
,
u - -квантиль нормированного нормального распределения.
77
min ( n )
Величины
при n60 для трех наиболее употребительных значений
уровня значимости приведены в таблице 3 [3].
Таблица 3.
n
0,05
0,01
0,001
4
0,390
0,313
0,295
5
0,410
0,269
0,208
6
0,445
0,281
0,182
7
0,468
0,307
0,185
8
0,491
0,331
0,202
9
0,512
0,354
0,221
10
0,531
0,376
0,241
11
0,548
0,369
0,260
12
0,564
0,414
0,278
13
0,578
0,431
0,295
14
0,591
0,447
0,311
15
0,603
0,461
0,327
16
0,614
0,475
0,341
17
0,624
0,487
0,355
18
0,633
0,499
0,368
19
0,642
0,510
0,381
20
0,650
0,520
0,393
30
0,709
0,598
0,482
40
0,746
0,647
0,543
50
0,772
0,681
0,585
78
Критерий серий, основанный на медиане выборки
Пусть
выборка х1 , х2 ,..., хn
имеется
из
некоторой
генеральной
совокупности. Расположим элементы выборки в порядке возрастания, т.е. в так
называемый вариационный ряд х(1) , х( 2 ) ,..., х( n ) (так что, например, х (1) - это
наименьшее из всех выборочных значений
х1 , х2 ,..., хn ;
х(n ) - наибольшее из
всех выборочных данных).
n
В качестве выборочного значения медианы xˆ med (n) берется средний (по
расположению) элемент вариационного ряда, т.е.
(n)
x med
1
2 ( x( n ) x( n 1) ), если n четно
2
2
x n 1 , если n нечетно
( 2 )
Затем возвращаемся к исходной выборке
х1 , х2 ,..., хn и будем вместо каждого
n
n
x i ставить плюс, если xi xˆ med
(n) , и минус, если xi xˆ med (n) (члены
n
выборки, равные xˆ med (n) в полученной таким образом последовательности
плюсов и минусов опускаются). Полученная нами последовательность плюсов
и минусов характеризуется общим числом серий (n) и протяженностью самой
длинной серии (n) , где под «серией» понимается последовательность подряд
идущих плюсов или подряд идущих минусов. Очевидно, что если наблюдения
стохастически
независимы,
то
чередование
плюсов
и
минусов
в
последовательности должно быть более или менее «случайным», т.е. эта
последовательность не должна содержать слишком длинных серий подряд
идущих
плюсов
или
минусов.
В
данном
критерии
рассматривается
одновременно пара критических статистик (n); (n), причем распределение
(n)
в
предположении
независимости
результатов
нормальным со средним
справедливости
наблюдения
гипотезы
стохастической
оказывается
приблизительно
79
M (n)
n2
2
и дисперсией
D (n)
1
(n 1) .
4
Что касается (n) , то оно изучено и затабулировано. Мы возьмем соотношение
для определенной величины уровня значимости 0,05 .
При данном уровне значимости получаем следующие неравенства:
max (n) [3,3 log 10 n 1]
1
2
(n) [ (n 1 1,96 n 1)]
В случае если хотя бы одно из неравенств окажется нарушенным, то
гипотеза о том, что исходные результаты наблюдения являются стохастически
независимыми, отвергается.
Критерий «восходящих» и «нисходящих» серий
Этот
критерий
«улавливает»
постепенное
смещение
среднего
в
исследуемом распределении не только монотонного, но и более общего
характера, например, периодического и является одним из самых надежных
признаков обнаружения тенденций скрытых в динамических рядах.
Пусть имеется выборка х1 , х2 ,..., хn , отобразим ее свойства в символьном
множестве из (n+1) элемента, где на i-ом месте ставится плюс, если
xi 1 xi 0 , и минус, если xi 1 xi 0 (если два или несколько следующих
друг за другом наблюдений равны между собой, то принимается во внимание
только одно из них). Очевидно, последовательность подряд идущих плюсов
будет соответствовать тогда количественному возрастанию результатов
наблюдения, а последовательность минусов – их убыванию. Если же
рассматриваемая выборка окажется случайной, то в образованной таким
образом последовательности знаков общее число серий однотипных символов
не может быть слишком малым, а их протяженность – слишком большой.
80
При уровне значимости 0,05 расчетное количественное выражение
1
3
этого правила имеет вид: (n) [ (2n 1) 1,96
16n 29
)] ,
90
( n) 0 ( n) ,
где под
(n) и (n) понимается соответственно фактическое общее число
серий и количество подряд идущих полюсов или минусов в самой длинной
полученной серии, а величина 0 (n) табулируется и определяется на основе
следующий таблицы.
0 ( n)
n
n<=26
5
26<n<=153
6
153<n<=1170
7
Если хотя бы одно из неравенств окажется нарушенным, то гипотезу о
случайности выборки следует отвергнуть.
2.3.3. Моделирование и прогноз временных рядов
методами сглаживания
Следующим шагом в исследовании свойств ряда динамики является
обнаружение характера его тенденций с последующей пролонгацией таковой в
будущее, если конечно тенденция существует. При решении такого рода задач
исследователь
может
воспользоваться
хорошо
разработанным
инструментарием сглаживания временных рядов, методы которого условно
можно разделить на две группы:
- аналитические, при использовании которых заранее предполагается
вид зависимости, описывающей тенденцию ряда, с последующей
оценкой параметров модели сглаживания;
81
- алгоритмические, которые не предполагают априорных знаний
сглаживающей кривой, ориентируясь лишь на алгоритм расчета
сглаженных уровней ряда.
Как правило, самым распространенным способом восстановления
оценок априорно заданной модели временного ряда является МНК,
используемый в рамках однофакторной либо многофакторной регрессионной
модели [1, 4, 11, 13, 19, 25, 25, 31, 32, 52, 68, 69 и др.]. К алгоритмическим
методам
выделения
тенденции
ряда
относят
различные
алгоритмы
усреднения данных по ряду [25, 31, 32, 36, 68, 69 и др.].
В любом случае, вне зависимости от группы методов выбранных
исследователем, они базируются на одном и том же постулате: сглаживающая
кривая должна быть так построена, чтобы, сохраняя основную тенденцию
ряда уменьшить диапазон его колебаний, т.е. дисперсию фактического ряда.
Сглаживающие модели временных рядов позволяют довольно успешно
справляться с обоснованием и конструированием безусловных прогнозов
развития разнообразных социально-экономических явлений. При этом ясно,
что построение точечного прогноза носит понятный механический характер
при удовлетворительных результатах идентификации и оценки модели
развития.
Для отыскания прогнозного интервала предсказания поведения ряда с
заданным уровнем значимости и соответствующим числом степеней
свободы
будем использовать тот факт, что величина ошибки прогноза, т.е.
eˆ y yˆ ( x p ) , в любой точке x также имеет нормальный (близкий к
нормальному) закон распределения.
В этом случае среднее значение случайной составит:
M [eˆ] M [ y yˆ ( x p )] 0 , а дисперсия ряда соответственно
D[eˆ] D[ y yˆ ( x p )] Dy Dyˆ ( x p ) 2 Dyˆ ( x p ) .
Таким образом, для получения удовлетворительного интервального
прогноза искомой величины на заданную дату либо за предусмотренный
82
промежуток времени необходимо рассчитать дисперсию ошибки прогноза
D[eˆ] D yˆ , которая будет складываться из модельной дисперсии
Df
и
дисперсии случайной D по ряду, то есть иначе мы можем записать:
Dy D( f ( x p ) t ) D f D .
Здесь xp – прогноз экзогенных переменных модели.
Имея в виду возможность проведения для данного динамического ряда
оценки дисперсии (s2) случайной составляющей временного ряда, т.е.
D 2 s 2 , и оценить модельную дисперсию s 2f , значение которой
определяется
спецификой
систематической
конкретного
составляющей
ряда,
модельного
можем
представления
получить
оценку
2
2
среднеквадратической ошибки прогноза, которая составит s yˆ s f s .
При этом, как известно, величина среднеквадратической ошибки ряда
может быть оценена по формуле:
2
yi yˆ i
N
s
ŷi
i 1
, где
- сглаженное значение ряда;
- число степеней свободы.
Соответственно, интервальный прогноз рассчитываем как точечный
прогноз плюс минус среднеквадратическая ошибка прогноза, умноженная на tстатистику Стьюдента с заданным уровнем значимости и соответствующим
числом степеней свободы, определяемых из числа уровней исследуемого ряда
за вычитанием количества параметров сглаживающей модели. Таким образом,
окончательно интервальный прогноз временного ряда на l периодов вперед
можно оценить следующим образом:
y N l fˆN l t ( ) s yˆ
(2.3.1) , где
83
fˆN l
- значение точечного прогноза динамики ряда на (N+l)-й момент
времени.
2.3.3.1. Алгоритмические методы сглаживания
временных рядов
К классу алгоритмических методов выявления тенденций во временных
рядах относятся разнообразные процедуры усреднения данных по ряду, т.е.
построению их сглаженных усредненных значений. Способ усреднения ряда,
как
правило,
и
определяет
наименование
метода.
В
практике
эконометрического моделирования алгоритмические методы сглаживания
могут применяться с двумя целями:
- выявление общей тенденции развития ряда;
- прогнозирование тенденции в ряду.
Наиболее широкое применение методы алгоритмического сглаживания
находят либо в условиях, когда исследователь имеет дело с так называемыми
короткими рядами, либо в условиях высокой нестабильности, хаотичности
исследуемой системы, что впрочем, по последствиям, практически адекватно
предыдущему случаю.
Методы сглаживания отличаются от традиционно используемых
современных методов эконометрического моделирования. Они, например, не
требуют подбора "оптимальной модели, " и они вообще не производят
"оптимальные прогнозы". Скорее, они просто способ, объясняющий
компьютеру как провести сглаженную линию через данные и экстраполировать
ее разумным способом, также как мы сделали бы это вручную, исходя из неких
интуитивно-визуальных соображений.
При использовании алгоритмических методов сглаживания, мы не
пытаемся найти модель, которая лучше всего описывают данные; скорее, мы
подгоняем предопределенную модель к данным. Некоторые ученые по этой
причине не любят методы сглаживания, однако, они использовались успешно
много лет и по серьезным причинам. Эти методы наиболее полезны в ситуации,
84
когда более «мудрые» методы моделирования не могут использоваться. Вопервых, доступные выборки данных иногда очень маленькие. Предположим,
например, что мы должны произвести прогноз, основанный на выборке
ретроспективных данных, содержащих только четыре наблюдения. Эта
ситуация кажется чрезвычайной, но она возникает иногда в практических
случаях, например, при прогнозе продаж нового продукта на рынке товаров или
услуг. Здесь, число степеней свободы мало настолько, что невозможно оценить
значимость любой подобранной модели. Методы алгоритмического
сглаживания в предельном случае, напротив, не требуют никакой оценки, или
минимальной оценки.
Во-вторых, задача при прогнозировании иногда огромна. Предположим,
например, что каждую неделю мы должны предсказать цены огромного числа
сырья, материалов и комплектующих некого продукта, например авиалайнера.
Снова, такие предположения чрезвычайны, но они происходят на практике. В
таких предположениях, даже если ретроспективные данные обширны (хотя в
общем случае, конечно, они могут и не быть такими), то нет просто никакого
способа обеспечить достаточное внимание, требуемое для оценки и
обслуживания множества различных моделей прогноза. Методы сглаживания,
напротив, требуют небольшого внимания. Они - один из примеров того, что
иногда называют "автоматическими" методами прогноза, и они часто полезны
при прогнозировании на основе обширных, часто обновляющихся данных.
Наконец, методы сглаживания производят оптимальные прогнозы в
некоторых условиях, которые, оказывается, глубоко связаны с присутствием
единичных корней в ряде, по которому строится прогноз, т.е. его скрытыми
математическими свойствами. Кроме того, более обоснованные методы
производят оптимальные прогнозы только при известных условиях, типа
правильной спецификации модели для прогноза.
В заключение следует сказать, что построение доверительных интервалов
прогнозов, построенных методами алгоритмического сглаживания, скорее дань
традиции, чем строго обоснованная процедура. Процедура их подсчета часто
несет в семе элементы эвристик. Рассматриваемые методы могут производить
оптимальные точечные прогнозы при некоторых специальных процессах
получения данных, но обычно в общем случае мы не предполагаем, что
специальные процессы получения данных действительно присутствуют. Вместо
этого, методы алгоритмического сглаживания используются как "черные
85
ящики", чтобы произвести точечные прогнозы без попытки выявить
стохастическую структуру данных, без выявления наиболее подходящей
модели, которая могла бы использоваться, чтобы произвести вероятностно
обоснованный надежный интервальный прогноз или прогнозы плотности
распределения в дополнении к точечному прогнозу. Однако в дальнейшем
будут даны практические рекомендации по оценке доверительных интервалов
прогноза, по крайней мере, на один шаг упреждения.
Методы взвешенного скользящего среднего
Общая идея этих методов заключается в том, что мы выбираем интервал
сглаживания m (m<N, в предельном случае m=N, но по понятным
соображениям, далее будем полагать, что m<<N) и далее по заданному заранее
алгоритму рассчитываем среднее или лучше сказать взвешенное усредненное
значение показателя для интервала сглаживания. Полученное при этом
сглаженное значение относиться к некоторому, наперед оговоренному
алгоритмом, моменту времени. При этом, как правило, точечное значение
прогнозируемого показателя, на требуемый период упреждения (обычно
единичный) сохраняет значение последнего среднего сглаженного уровня ряда.
Следует иметь ввиду, что процедура сглаживания может осуществляться, как
для интервалов четной (m=2p), так и нечетной (m=2p+1) длинны. Предельным
случаем алгоритмического сглаживания является сглаживание на основе
простой арифметической средней по ряду.
Обозначим исходные данные y t Tt 1 или yt и сглаженные y t или yt или
f t . Запишем общий вид расчетной формулы точечного прогноза для
взвешенных значений временного ряда yt:
f t
p
w y(t i) ,где
i p
i
f t - взвешенное значение для t-го уровня ряда,
t p 1, p 2,..., m p 1, m p .
86
wi
- является весом для i-го значения интервала сглаживания при условии,
что wi 0, wi 1 .
i
Обычно сглаженное значение, в зависимости от процедуры может
относиться
к
середине
интервала,
к
последнему
моменту
времени
рассматриваемого интервала (т.н. адаптивное сглаживание), либо к первому
моменту времени, последующему за охваченным интервалом сглаживания.
Очевидно, что при таком расчете исходный ряд укорачивается на 2pзначений. Как уже отмечалось, интервал сглаживания может содержать как
четное, так и нечетное количество членов. Нечетное количество членов, если
так можно сказать удобнее, так как в этом случае сглаженное значение легко
сопоставляется фактическому моменту времени. Если же сглаживание
производится четным интервалом (это может быть необходимым, например,
при расчете среднеквартальных годовых, среднемесячных недельных и так
далее), когда в силу естественных причин мы не можем выбрать нечетный
интервал, тогда сглаженное значение оказывается между фактическими
уровнями ряда [3]. Например, для значения t рассчитываем сглаженное
значение (берем фактические уровни с t-p по t+p интервал сглаживания m=2p).
В итоге получаем, что наше расчетное значение лежит между уровнями t-1 и t.
Определим этот момент, как t
1
2
(обозначим за
1
половину единичного такта).
2
Тогда значение f t для t-го уровня находится как среднее из сглаженных
значений ряда для t и t+1 уровня, то есть можно записать:
1 1
f t f t
2 2
1
f t
2
Стоит заметить, что вопрос выбора длины интервала сглаживания касается
не только четности или нечетности. Величина m влияет на сглаживающие
свойства модели. Далее будет показано что, чем больше m, тем сильнее модель
гасит колебания. Это следует из формулы модельной дисперсии. В то же время,
увеличивая интервал сглаживания, мы увеличиваем потерю данных.
87
Расчет весовых коэффициентов wi для методов скользящих средних
проводится, опираясь на предположении теории аналитических функций о том,
что любая гладкая функция в ограниченном интервале (в нашем случае это
2p+1 значений временного ряда) может быть представлена полиномом степени
q
i
q. Т.е. в виде f t a0 ai t .
i 1
Соответственно, значения и структура весов будут зависеть от длины
интервала
сглаживания
и
степени
аппроксимирующего
полинома,
использованного на этом интервале. Оценки коэффициентов выбранного
полинома подбираются из условия минимизации суммы квадратов отклонений
значения полинома и фактического значения в данной точке.
Для примера рассмотрим процедуры оценки весов для полиномов первого
и второго порядков. Это соответственно метод простого скользящего среднего
и метод взвешенного скользящего среднего [3].
Метод простого скользящего среднего
Пусть для данного заданного интервала сглаживания m=2p+1 мы строим
оценку фактического уровня ряда, используя полином первого порядка:
f t a0 a1t , t=1, 2, …, 2p+1.
Обычно время t в модели изменяется от начального момента к конечному.
В данном случае, для упрощения записи время изменяют таким образом, чтобы
нулевой уровень соответствовал центру интервала сглаживания:
i p,...,0,..., p
Параметр t специально заменен, чтобы была возможность легче отличать
новый порядок изменения времени.
Запишем условие, из которого предстоит определить оценки a 0 и a1 :
p
xi a
i p
a1i min
2
0
88
Используя, например МНК, находим частные производные по a 0 и a1 .
Получаем следующую систему:
p
p
2m 1a 0 a1 i y i
i p
i p
p
p
p
2
a
0 i a1 i iy i
i p
i p
i p
.
Далее, используя следствие замены, из которой
p
i 0
i p
и то, что оценка уровня ряда определяется в средней точке i=0,
окончательно можно записать решение построенной системы в следующем
виде:
f t a0 a1i a0
p
1
1 t p
yi .
yi m i
2 p 1 i p
t p
Таким образом, рассчитанное сглаженное
значение
t-го
уровня
ряда
определяется по формуле:
i t p
yt
y
i t p
i t p
i
2 p 1
y
i t p
i
m
,
либо его можно найти, используя следующее рекуррентное соотношение:
yt yt 1
y t p yt ( p 1)
m
.
Этот метод относится к наиболее простым. Его использование позволяет
сгладить циклические и случайные колебания в ряду.
Следовательно, точечный
прогноз на
t+1 период мы
получаем
yt 1 fˆ (t ) , то есть как последнее расчетное значение скользящей средней.
Для осуществления интервального прогноза необходимо рассчитать дисперсию
прогноза, которая будет складываться из дисперсии модельной и случайной в
соответствии со сделанными ранее замечаниями.
Величину модельной дисперсии можем найти следующим образом:
89
i t p
yi
i t p
1
Dy D
m m2
m
Dy
t 1
t
2
m .
Соответственно, с учетом сделанных ранее объяснений, интервальный
прогноз рассчитываем как точечный прогноз плюс минус среднеквадратическая
ошибка прогноза, умноженная на t-статистику Стьюдента с заданным уровнем
значимости
и соответствующей степенью свободы
. Таким образом,
окончательно имеем
1
y N 1 f N t ( ) S 1
m
.
Обобщенное представление методов взвешенного скользящего среднего
Теперь допустим, что для данного заданного интервала сглаживания
размером в m=2p+1-значений мы строим оценку фактического уровня ряда,
используя полином второго порядка вида:
f t a0 a1t a 2 t 2 .
Проведем аналогичную показанной ранее замену для времени:
i 2,...,0,...,2 .
В этом случае параметры оценки коэффициентов аппроксимирующей параболы
будут находиться из условия:
yi a
p
i p
0
a1i a 2 i 2
2
min .
Определим частные производные данной функции по a 0 , a1 и a 2 ,
приравняв их к нулю, получим следующую систему равенств.
90
2
2
2
2
2
y
i
5
a
a
i
a
0
1
2 i 0
i 2
i 2
i 2
2
2
2
2
2
3
2
iy
i
a
i
a
i
a
0
1
2 i 0
.
i 2
i 2
i 2
i 2
2
2
2
2
2 i 2 y i a 0 i 2 a1 i 3 a 2 i 4 0
i 2
i 2
i 2
i 2
Далее решив полученную систему уравнений, используя следствие замены,
p
p
i 0 , i
из которой
i p
3
i p
0 и то, что оценка уровня ряда определяется в
средней точке усредняемого интервала i=0 можно найти следующие значения
параметров аппроксимирующего полинома второй степени:
a0
2
2
2
2
i 2
i 2
2
i 2
2
i 2
4
2
i yi i i 2 yi
5 i
4
i 2
2
2
2
i
i 2
34 y i 10 i y i
i 2
2
i 2
170 100
;
1
3 y 2 12 y 1 17 y0 12 y1 3 y2
35
2
a1
iy i
i 2
2
i
2
1
2 y 2 y 1 y1 2 y2 ;
10
i 2
2
a2
2
i 2
2
i 2
2
5 i
i 2
2
2
5 i y i i y i
4
i 2
2
i
i 2
2
.
1
2 y 2 y 1 2 y0 y1 2 y2
14
Таким образом, окончательно сглаженные значения ряда для каждого
интервала сглаживания m могут быть найдены из следующего соотношения:
1
f t a 0 a1i a 2 i 2 a 0 3 y 2 12 y 1 17 y 0 12 y 1 3 y 2
35
Или в общем виде:
91
1
f t 3 y t 2 12 y t 1 17 y t 12 y t 1 3 y t 2 .
35
Этот метод похож на предыдущий. Его отличие заключается в том, что,
если при вычислении простой скользящей средней мы каждому значению
интервала сглаживания придавали равный вес
1
, то здесь для каждого
m
значения рассчитывается свой вес. Причем вес зависит от того, насколько
далеко отстоит взвешиваемый уровень от центра интервала сглаживания.
Аналогичным образом рассчитываются формулы для прочих значений
интервалов сглаживания. Запишем их, например, для значений m=7 и m=9:
1
f t 2 y t 3 3 y t 2 6 y t 1 7 y t 6 y t 1 3 y t 2 2 y t 3 ;
21
1
21yt 4 14 yt 3 39 yt 2 54 yt 1 59 yt 54 yt 1 39 yt 2 14 yt 3 21yt 4 .
f t
231
Величину модельной дисперсии можем найти следующим образом:
m
D y D wt y (t )
t 1
m
2
w
2
t
2 h ,где
t
m
h wt2 .
t 1
Окончательно, с учетом сделанных ранее объяснений, интервальный
прогноз, проведенный методом взвешенного скользящего среднего можно
оценить следующим образом:
y N 1 f N t S 1 h .
Экспоненциальное сглаживание Брауна
Довольно часто при исследовании временных рядов используют методы
экспоненциального сглаживания (модели Брауна) [3, 25, 31, 36, 68. Это
объясняется тем, что они позволяют более обоснованно и сбалансированно
учитывать в текущем сглаженном уровне временного ряда его историю. Одна
из основных особенностей этих методов заключается в том, для расчета
сглаженного значения уровня t нам необходимо знать предыдущее сглаженное
92
значение
St-1 и фактическое значение временного ряда уt.
В практике
моделирования динамических рядов используется множество разновидностей
моделей Брауна. Для примера поясним принципы построения и оценки
параметров модели экспоненциального сглаживания, а также использования ее
в качестве генератора прогнозной информации для т.н. простой формы модели
Брауна.
Запишем формулу для расчета St - сглаженного значения для t-го уровня
ряда:
S t xt (1 )S t 1
(2.3.2)
где St – значение экспоненциальной средней в момент t;
St-1 – значение экспоненциальной средней в момент t-1;
- параметр сглаживания, т.н. сглаживающий фильтр.
Величина изменяется в пределах: 0 1 . Вариации имеют
серьезное
влияние
на
характеристики
самого
сглаживания,
и
выбор
оптимального значения зависит сразу от нескольких из них, причем
противоречащих друг другу.
Первое, что необходимо отметить в сглаживании Брауна – это
принципиально другое оценивание весов предыдущих значений ряда. Если
записать значение сглаженного ряда St и последовательно раскрывать значения
St-1, St-2, …, через предыдущие уровни ряда и так до y0=S0, используя
рекуррентное соотношение (3.2), то в итоге легко получаем следующее
представление исходного соотношения:
S t yt (1 ) S t 1 yt (1 )yt 1 (1 ) S t 2 yt a(1 ) yt 1 (1 ) 2 yt 2
... (1 ) k yt k ... (1 ) t y0
.
В итоге получаем следующее рекуррентное соотношение для вычисления
усредненного значения ряда методом Брауна:
t 1
S t (1 ) i y t i (1 ) t y 0
i 0
где t в данном случае число членов ряда;
y0 - является начальным уровнем временного ряда.
(2.3.3),
93
Вопрос о выборе начального уровня может быть решен несколькими
путями. В первом случае, если имеются прошлые данные, то можно
использовать среднюю арифметическую этих данных или их части. Если
такими данными мы не располагаем, то в качестве нулевого уровня может быть
использована средняя арифметическая нескольких начальных значений
исходного ряда, либо просто первое значение ряда. Также начальное значение
может быть оценено исходя из уже полученной формулы, из которой следует,
что начальному значению после t итераций придается вес
(1 ) t . Стоит
отметить, что правильный выбор начального уровня может иметь существенное
значение, так как заведомо неверное значение при небольшом количестве
наблюдений может привести к большим ошибкам прогнозов. В этой ситуации
можно придать большое значение и тем самым быстро погасить влияние
нулевого уровня, но при большом снижаются сглаживающие свойства
модели.
Рассмотрим полученную формулу (2.3.3). Допусти, что в нашем
распоряжении достаточно большой временной ряд, т.е. N , тогда значение
N
второго слагаемого формулы (2.3.3) (1 ) y 0 быстро стремиться к 0 за счет
свойств сглаживаемого ряда. Соответственно, приближенная оценка t-го члена
сглаженного ряда может быть получена из следующего соотношения:
N 1
S t (1 ) i y t i
(2.3.4),
i 0
то есть величина St – сглаженное значение ряда, является взвешенной суммой
всех членов ряда. При этом величины весов в зависимости от того насколько
далеко отстоит уровень от сглаживаемого будут убывать экспоненциально, что
очевидно из соотношения (2.3.4). Вес значения уровня t составит , вес для
2
уровня t-1 (1 ) , для уровня t-2 (1 ) и так далее, для y0 соответственно
- (1 ) N 0 при бесконечно большом N.
Определим модельную дисперсию ряда, заданного соотношением (2.3.4).
94
D( S t ) D (1 ) i yt i 2 (1 ) 2i 2
2.
2
t 0
i 0
Так как значение параметра сглаживания ряда динамики колеблется в
пределах
0 1 , то легко показать, что сглаженный ряд имеет то же
математическое ожидание, что и исходный, но меньшую дисперсию
2
1.
Также можно заметить, что, изменяя значение сглаживающего фильтра , мы
влияем на силу сглаживания. Чем больше величина приближается к единице,
тем более «актуальным» становиться ряд. Чем меньше параметр сглаживания,
тем больше сокращается дисперсия исходного ряда.
Выбор величины постоянной сглаживания требует особого внимания.
Рассмотрим критические значения , чтобы пронаблюдать, что будет
происходить с процессом в этих крайних точках. Если взять 0 , то получим
S t S 0 , то есть адаптация модели отсутствует. Если принять 1 , то
получим S t yt , то есть модель, в которой сглаженное значение равно
фактическому уровню временного ряда.
На практике подбор допустимого значения параметра сглаживания
рекомендуется производить эмпирическим путем, то есть, итеративно
перебирая его возможные значения и выбирая оптимальный уровень
коэффициента по критерию минимизации дисперсии ошибки прогноза на
тестовом наборе данных. Этот способ предлагается как наиболее достоверный.
На выбор постоянной сглаживания будут влиять конкретные специфические
характеристики временного ряда. Опыт исследователей показывает, что
наибольшая точность при прогнозировании экономических временных рядов
может быть достигнута при практически любом допустимом значении .
Основываясь на опыте исследований [36] можно отметить, что в случае, когда
параметр принимает значения близкие к 1, следует подвергнуть сомнению
законность выбора данной модели. Так как это может свидетельствовать о
наличии в ряду ярко выраженных тенденций или сезонных колебаний. Для
таких рядов следует использовать другие модели, более эффективные. Стоит
95
отметить, что на величину постоянной сглаживания также может оказывать
влияние период упреждения. При увеличении периода прогноза, вероятно,
следует учитывать общую тенденцию за прошлые периоды, нежели последние
изменения.
Простое экспоненциальное сглаживание Брауна предполагает оценивание
текущего значения одного коэффициента в прогнозной модели динамики
временного ряда следующим образом
yˆ ( N 1) S N .
Окончательно, с учетом сделанных ранее объяснений, интервальный
прогноз, проведенный методом простого экспоненциального сглаживания
можно оценить следующим образом:
y N 1 S N t q S
2
.
2
Вследствие успешности практического использования этой модели она
была развита Р. Г. Брауном и Р. Ф. Майером для процессов, которые
описывались моделями, состоящими из многих полиномиальных членов [3, 31,
36]. За исходную гипотезу принимается то, что временной ряд описывается
полиномом N порядка, а прогноз на периодов вперед будет иметь вид:
N a
y N a 0 i i ,
i 1 i!
где
a0 , a1 ,..., a N
коэффициенты полинома.
Таким образом, рассмотренный ранее пример простого
экспоненциального сглаживания для модели общего вида может быть
представлен как
yˆ ( N 1) a0, N S N , т.е. прогноз по константе.
Приведение модели Брауна к виду (2.3.2) позволяет определить
процедуру
многократного
многократного
экспоненциального
экспоненциального
сглаживания.
сглаживания
фактически
Процедура
является
96
применением
простого
экспоненциального
сглаживания
к
результатам
сглаживания порядка p-1. Ее можно записать так:
S t p S tp 1 (1 ) S tp1 ,
где S t0 yt ,
p = 1, 2, …, n – порядок сглаживания,
S 0 , S 02 ,...,S 0n
начальные
-
значения
экспоненциальных
средних
соответствующего порядка.
Фундаментальная
доказанная
теорема
Брауном
и
метода
Маейром
экспоненциального
[3,
36],
сглаживания,
утверждает,
что
между
коэффициентами предсказывающего полинома и экспоненциальными средними
сглаживающей модели существует связь, выраженная через постоянную
сглаживания следующим образом:
n
S t p (1) k
k 0
ytk p k
( p 1 j )!
j (1 ) j
.
k! p 1! j 0
j!
То есть, имеются n+1 уравнение, в которых сглаженные значения S t p
k
выражены через линейные комбинации производных уровней y t .
Эта идея основана на том, что исходный ряд y t может быть разложен в
ряд Тейлора с n+1 количеством членов:
k ytk
k 0
k!
yt
n
k ytk
k 0
k!
n
k at 1
k 0
k!
.
В общем случае предполагается, что процесс может быть представлен
как:
yt t t ,
n
t
i 0
ai 1 i
t ,
i!
где t - случайные отклонения с математическим ожиданием равным нулю и
конечной дисперсией.
97
В случае, когда порядок i нулевой, мы имеем простое экспоненциальное
сглаживание. Для первого порядка – линейное экспоненциальное сглаживание,
для второго квадратичное экспоненциальное сглаживание и т.д. В практике, как
правило, используют сглаживания порядка не выше двух. Однако конкретно,
каждый раз данный вопрос решается эмпирически с учетом влияния порядка
сглаживания на выбранную систему критериев качества модели, а также с
учетом степени роста сложности вычислений по алгоритму.
Обратимся к более подробному рассмотрению информационных и
прогностических возможностей линейного и квадратичного экспоненциального
сглаживания [27, 31, 36].
Линейное экспоненциальное сглаживание
Пусть модель сглаживающего прогноза на основе модели Брауна имеет
вид:
t a1 a2 t
(2.3.5),
а начальные условия для сглаживающего полинома определены как:
S 0 a1
1
S 02 a1
a2
2(1 )
a2 .
Для того чтобы выразить коэффициенты
a1
и
a2
необходимо
воспользоваться коэффициентами уравнения тренда y t a1 a 2 t , полученными
методом наименьших квадратов.
Тогда экспоненциальные средние моделей первого и второго порядков
могут быть оценены как:
S t yt (1 )S t 1 ,
S t2 S t (1 ) S t21 .
Оценки параметров коэффициентов модели (2.3.5) составят:
a1,T 2ST ST2 ,
98
a 2,T
( S T S T2 ) .
1
Окончательно точечный прогноз по модели экспоненциального среднего
первого порядка на момент времени T:
yˆ (T ) a1,T a 2,T (2
) S T (1
) S T2 .
1
1
Оценить модельную дисперсию можем по формуле:
s yˆ s y
1 4(1 ) 5(1 )
(2 )
2
2 (4 3 )t 2 2 t 2 , где
s y - среднеквадратическая ошибка отклонения от линейного тренда, которую
определяем из формулы:
sy
( y
i
yˆ i ) 2
n2
.
Квадратичное экспоненциальное сглаживание
Пусть модель сглаживания прогноза по модели Брауна имеет вид:
1
2
t a1 a 2 t a3t 2 ,
а начальные условия для сглаживающего полинома заданы следующим
образом:
S 0 a1
1
S 02 a1
a2
2(1 )
S 03 a1
a2
3(1 )
(1 )( 2 )
a3 ,
2 2
(1 )(3 2 )
a2
2
a3 ,
3(1 )( 4 3 )
a3 .
2 2
Тогда экспоненциальные средние первого, второго и третьего порядков могут
быть подсчитаны по следующим формулам:
S t yt (1 ) S t 1 ,
S t2 S t (1 ) S t21 ,
S t3 S t2 (1 ) S t31 ,
99
а оценки коэффициентов модели могут быть оценены из следующих
соотношений:
a1,T 3ST 3ST2 3ST3 ,
a 2,T
(6 5 ) S T 2(5 4 ) S T2 (4 3 ) S T3 ,
2
2(1 )
a3,T
2
S T 2S T2 S T3 .
2
(1 )
Окончательно точечный прогноз по модели экспоненциального среднего
второго порядка на момент времени T:
ST
1
yˆ (T ) a1,T a 2,T 2 a3,T 6(1 ) 2 (6 5 ) 2 2
2
2(1 ) 2
6(1 ) 2(5 4 ) 2
2
2
2
S T2
2(1 ) 2 (4 3 ) 2 2
2
2(1 )
.
Ошибка модели прогноза находится по формуле:
s yˆ s y 2 3 2 3 3t ,
где s y - среднеквадратическая ошибка отклонения от квадратичного тренда,
которую определяем по формуле:
sy
( y
i
yˆ i ) 2
n3
,
где n – количество членов в исследуемом ряду.
Метод Хольта
С развитием экспоненциального сглаживания стали появляться новые
модели, основанные на тех же принципах адаптации, что и модели
экспоненциального сглаживания [3, 36, 63]. За исходную гипотезу построения
модели Хольта берется представление о том, что имеется не только медленно
развивающийся местный уровень, но также и тенденцию с медленно
развивающимся наклоном. Для этой ситуации Ч. Хольтом была предложена
модель, в которой прогноз осуществляется путем экстраполяции тенденции
линейным трендом на тактов вперед:
100
yˆ a1,t a 2,t , где
aˆ1t aˆ1,t 1 t .
aˆ 2t aˆ 2,t 1 t
Для расчета коэффициентов тренда используется два параметра сглаживания
, , таких что 0 , 1 . По своей сути они определяют характер
изменчивости параметров â1 и â2 .
Адаптация данных параметров линейного тренда проводится по
следующим формулам:
a1,t y t 1 a1,t 1 a 2,t 1
a 2,t a1,t a 2,t 1 1 a 2,t 1 .
Начальные уровни процедуры сглаживания также рекомендуется подбирать
эмпирическим путем, снижая ошибки информационной и прогностической
пригодности модели.
Понятие об адаптивных принципах настройки моделей алгоритмического
сглаживания
Практически все рассмотренные нами ранее алгоритмы сглаживания
временных рядов, а также процедуры генерации прогнозной информации на
базе этих методов, с той или иной степенью успешности реализуют принцип
актуализации моделей прогнозирования. Поэтому модели алгоритмического
сглаживания порядков выше нулевого и с наличием подстройки параметров
модели часто именуют адаптивными моделями, а прогнозы построенными на
их базе – адаптивными прогнозами. Модели данного вида отличаются от всех
остальных тем, что они отражают текущие свойства ряда и способны
непрерывно
учитывать
эволюцию
посредством
динамики
временного
заключается
в
построении
изучаемого
ряда.
процесса,
Цель
самонастраивающихся
выражаемую
адаптивных
методов
(корректирующихся)
экономико-математических моделей, которые отражают меняющиеся во
101
времени условия функционирования, учитывают неодинаковую ценность
различных членов временного ряда для настоящего момента времени.
В связи с принципами формальной организации процедур подстройки
параметров моделей, способы адаптации условно можно разделить на
алгоритмические и эвристические. Наибольшего качества в своем развитии
адаптационные механизмы находят в нейросетевых, генетических и гибридных
технологиях моделирования и прогнозирования.
Последовательность
процедуры
адаптации
моделей
может
быть
представлена следующим образом.
1. Генерация параметров исходной прогнозирующей модели, исходя из
наличия ретроспективной информации.
2. Генерация прогноза на прогнозирующей модели.
3. Проверка точности прогноза (по факту события либо на тесовом
множестве).
4. Подстройка параметров прогнозирующей модели с помощью
компенсирующего воздействия.
Наиболее распространенными алгоритмическими способами адаптивного
прогнозирования являются [36, 63, 68, 75, 76, 80, 83]:
- метод экспоненциального сглаживания (модель Брауна);
- метод Хольта-Уинтерса (Хольта);
- адаптивная модель сезонности Тейла-Вейджа и др.
Эффективность
практического
применения
адаптивных
прогнозов
связана с решением проблемы повышения адаптивных свойств оцениваемых
моделей, т.е. ускорением реакции прогнозирующей системы на внезапные
изменения значений изучаемого временного ряда. При этом изначально
“логика” механизма адаптации задаётся априорно, а затем эмпирически
проверяется.
Быстрота реакции полученной искусственной системы характеризуется
параметрами адаптации, например, в рамках модели Брауна это осуществляется
путем эффективной подстройки параметра . Процесс “обучения” модели
102
состоит выборе наилучшего параметра адаптации на основе серии проб в
пределах
имеющегося
ретроспективного
материала
(обучающей
и
тестирующей выборок). Скорректированная таким образом модель является
более гибкой в сравнении с исходной, однако не является универсальным
инструментом прогнозирования.
Критериями прогностической полезности адаптивной модели обычно
являются стандартные критерии оценки качества прогноза, например,
среднеквадратичная ошибка прогноза sy .
В общем случае, говоря о повышении адаптационных свойств модели,
имеется в виду способность модели:
- своевременно выявить момент наступления изменений тенденции во
временных рядах;
- быстро надлежащим образом модифицировать параметры модели.
Таким образом, решение этих проблем в первую очередь связано с
обоснованным выбором критериев качества прогноза. Требования к подобного
рода индикаторам следующие: обладание достаточной чувствительностью к
устойчивым изменениям тенденций и минимальная реакция на случайные
колебания в динамике рядов. В теории адаптивного прогнозирования эти
индикаторы носят специальное название - следящих сигналов или трекингсигналов. Хронологически наиболее известными и часто используемыми
настроечными трекинг-сигналами являются индикаторы Браун и Тригга, а
также производные от них [36, 83]. Поясним принципы их конструирования.
1.) Индикатор Брауна
N
TR NB
t
t 1
t
, где
s
t
- абсолютное значение ошибки прогноза на период времени t ;
N
- период, за который осуществляется прогноз;
t
s
абсолютное
значение
ошибки
прогноза,
экспоненциального сглаживания с параметром ,
сглаженное
методом
103
t s t (1 ) t 1 s
Процедура использования TRNB алгоритмически проста:
- задаётся минимальное пороговое значение TRNB ,
B
- проверяется соотношение между TRN и .
B
Если TR NB < - используется построенная модель, в случае TR N >
-
корректируется параметр модели Брауна.
Очевидно, предложенный индикатор не лишён недостатков:
а). При выходе TRNB за обозначенную границу, назад он не возвращается,
несмотря на то, что система прогнозирования может уже работать в
нормальном режиме. Следовательно, величину суммарной ошибки числителя
постоянно необходимо контролировать во избежание ошибочных сигналов.
б). Если с какого-то момента времени система будет давать абсолютно
точный прогноз, TRNB также может выйти за отведенные границы (т.к. в пределе
он будет стремиться к бесконечности).
2.) Индикатор Тригга.
TR NT
( t ) s
t
,где величина T s , именуемая сглаженной ошибкой сигнала,
s
определяется из соотношения
t s t (1 ) t 1 s‘
Понятно, что индикатор TRNT лишен недостатков критерия Брауна и лежит
в границах от -1 до 1. Крайние границы достигаются только, когда ошибки
постоянно имеют один знак. Обычно для практики вычислений [61]
рекомендуется подбирать параметры сглаживания , при этом
желательно, чтобы выполнялось соотношение: .
104
2.3.3.2. Аналитические методы сглаживания временных рядов
Обнаружение исследователем факта присутствия во временном ряду
вековой составляющей делает насущной задачу оценки параметров модели
тренда. Т.е., модели вида yt f ТР (t ) t , где
f ТР (t )
- «вековой уровень», тренд, или систематическая составляющая
(неслучайная функция времени) ряда (далее здесь - f(t));
t - несистематическая
случайная
составляющая
ряда
с
нулевым
математическим ожиданием M [ t ] 0 и дисперсией D[ t ] 2 .
Обычно в ходе применения процедур выделения тренда из уровней
временного ряда предполагается, что разница между фактическим значением
уровня и трендом может включать в себя в самом общем случае циклическую,
сезонную компоненты, а также случайные колебания.
В этой связи желательно сузить круг допустимых аппроксимирующих
кривых. Можно попытаться оценить тенденцию визуально, однако, как
правило, это приводит к качественным суждениям типа: «Наблюдается рост».
Или в лучшем случае: «Наблюдается плавный рост». Более конструктивно вид
функции тренда подбирают исходя из типа роста исследуемого процесса,
опираясь на предварительно рассчитанные показатели абсолютного цепного
прироста и ускорения. Несмотря на многообразие реальных экономических
процессов,
динамические
характеристики
которых
могут
существенно
отличаться друг от друга, ограничить класс функций можно, отобрав те,
которые отражают особенности динамики показателя, прежде всего тип
развития. На практике различают четыре основных типа экономического роста
(аналогичная классификация может быть применена и для динамических рядов
со снижающимися значениями абсолютного цепного прироста [26, 57]):
I – постоянный рост (с постоянным или близким к нему абсолютным цепным
приростом);
105
II – увеличивающийся рост (с увеличивающимся абсолютным цепным
приростом);
III – уменьшающийся рост (с уменьшающимся абсолютным цепным
приростом);
IV – рост с качественными изменениями динамических характеристик на
протяжении исследуемого периода.
Для каждого типа роста наиболее часто в практике экономических
исследований встречаются следующие виды функций трендов.
I тип роста
1. Линейная функция: f(t)= 0+1t.
2. Линейно-гиперболическая функция:
f(t)= +t+/t, где >0; >0.
3. Линейно-логарифмическая функция 2-го порядка:
f(t)= 0+1ln(t)+ 2ln2(t),
где 1>0; 2>0.
II тип роста
1. Показательная функция:
f(t)= (1+)t, где >0; >0.
2. Парабола 2-го порядка:
f(t)= 0+1t+2t2, где 1>0; 2>0.
3. Парабола 3-го порядка:
f(t)= 0+1t+2t2+3t3,
где 1>0; 2>0; 3>0.
t
4. Обобщенная функция:
f(t)= exp( ( )d ( ) ,
0
где () - линейная, параболическая или другая функция, >0.
III тип роста
1. Степенная функция:
f(t)= t, где >0; 0<<1.
2. Линейно-логарифмическая функция: f(t)= 0+1ln(t), где 1>0.
3. Парабола 2-го порядка:
f(t)= 0+1t+2t2, где 1>0; 2>0.
4. Гипербола 1-го порядка:
f(t)= 0+1/t, где 1<0.
5. Гипербола 2-го порядка:
f(t)= 0+1/t +2/t2 , где 1<0; 2<0.
6. Модифицированная экспонента: f(t)=+e-t,
где <0.
106
IV тип роста
1. Линейно-логарифмическая функция 2-го порядка:
f(t)= 0+1ln(t)+ 2ln2(t),
где 1>0; 2>0.
2. Парабола 3-го порядка:
f(t)= 0+1t+2t2+3t3,
где 1>0; 2>0; 3>0.
3. Логистическая функция:
f(t)=
4. Первая функция Торнквиста:
5. Кривая Гомперца:
, где >0; >0; >0.
1 e t
f(t)=
t
, где >0; >0.
t
f(t)=t, где >0; >0; >0.
Для анализа особенностей трендовых моделей применимы следующие
предельные (непрерывные) характеристики развития:
1) непрерывный абсолютный прирост:
(t) = dQ(t)/dt;
2) непрерывный темп прироста:
t
3) непрерывное абсолютное ускорение:
(t )
dQ(t)
dlnQ(t)
;
/ Q(t)
dt
dt
4) непрерывное относительное ускорение: (t )
d (t ) d 2Q (t )
;
dt
dt 2
d (t )
d ln (t )
/ (t )
.
dt
dt
Оценивание параметров функции линейного тренда
Оценка параметров трендовых моделей может быть осуществлена
методом наименьших квадратов или методом минимизации суммы модулей
отклонений (для линейных и линеаризуемых моделей), градиентным методом,
методом Гаусса-Ньютона или методом Марквардта (для нелинейных моделей).
В общем случае при оценивании нелинейных трендовых зависимостей
используют чаще всего последний метод. Однако использование этих методов
наталкивается на ряд трудностей, одна из которых - выбор подходящей точки
начального приближения. Поэтому задачу оценивания на практике все же
107
пытаются свести к задаче оценки линейной регрессии. Поэтому обоснованным
является использование известного [25, 31, 32и др.] соотношения
a0
1 T
T
Z Z Z Y
a
(2.3.6)
для оценки параметров модели. Где вектор У - не что иное как исходный
динамический ряд уt , а матрица Z (расширенная матрица независимых
экзогенных наблюдений) состоит из единичного вектор-столбца и вектора
времени (в случае простой линейной связи). Исходя из результатов
интервального оценивания прогноза, построенного для случая многофакторной
регрессии (см. соответствующий раздел Учебного пособия), в основу формулы
доверительного интервала прогноза по тренду берется соотношение
y (x p ) [ y (x p ) t1 q / 2 sp ; y (x p ) t1 q / 2 sp ] , так что
s p s 1 ( Z p ) T ( Z T Z ) 1 Z p ,
где в случае простой линейной зависимости компоненты вектора xp
заменяются компонентам будущего вектора времени - tp, либо производным от
него. Ввиду последнего факта особо важное значение приобретает вопрос
адекватных преобразований нелинейных трендовых зависимостей в линейные.
Как правило, линеаризации добиваются путем введения дополнительных
переменных иногда с применением к исходной трендовой модели специальных
преобразований типа логарифмирования, разложения функции в ряд и т.п.
Рассмотрим способы типичных преобразований в некоторых частных задачах
оценки параметров нелинейной функции f(t) [25].
Оценка параметров наиболее употребляемых трендов
m
j
1. Полином m-го порядка: f(t)= о j t .
j 1
Уравнение модели имеет вид:
108
m
yt о j t j et ,
где
о , j , гдеj 1, m - оцениваемые
t 1, N ,
j 1
параметры
тренда.
Если
осуществить
в
модели
нелинейного
тренда
подстановку tj = xj, т.е. подать на вход модели вместо вектора времени матрицу
экзогенных переменных Х вида:
1
1
4
2
X
N N2
1
2m
.
N m
После чего исходная нелинейная модель приобретает вид линейной
зависимости от х.
m
j
j 1
tj
2. Гиперболическая функция m-го порядка: f (t ) 0
.
Способ сведения к линейной регрессии аналогичный: матрица Х имеет вид:
1
1
2
X
1
N
1
1
4
1
N2
1
1
2m .
1
Nm
m
j
3. Линейно-логарифмическая функция m-го порядка: f (t ) 0 j ln t.
j 1
Способ сведения к линейной регрессии аналогичный: матрица Х имеет вид:
0
ln 2
X
ln N
0
ln 2 2 ln m 2
.
ln 2 N ln m N
0
4. Линейно-гиперболическая функция: f (t ) * t
t
Эта модель сводится к линейной регрессии от двух независимых переменных.
Способ сведения аналогичный; матрица Х имеет вид:
109
1 1
1
2 2
X .
1
N
N
5. Модифицированная экспонента: f (t ) e .
t
Эта модель сводится к линейной регрессии от 1 независимой переменной.
Способ сведения аналогичный; матрица Х имеет вид:
e 1
2
e
X
.
N
e
Для следующих трендов к моделям будут применяться преобразования,
нарушающие предположения о случайных отклонениях (п.3.3.2). Поэтому
полученные оценки окажутся смещенными. Результаты п.п. 3.3.2 - 3.3.4 здесь
также могут быть сильно искажены. Покажем это на примере следующего
тренда.
6. Первая функция Торнквиста: f ( t )
Уравнение модели имеет вид: yt
*t
.
t
*t
et , t 1,... , N .
t
Оно легко трансформируется в следующий вид:
yt
1
1
t t * y t (1 t ) et , t .
Затем можно сделаем подстановку: х1 = t, x2 = t yt. Коэффициенты линейной
регрессии
обозначим:
A
1
;B .
Получим
следующую
модель:
1
yt Ax1,t Bx 2,t t , t , где t (1 t )et .
Коэффициенты модели оценивают при помощи МНК. После этого получают
оценки a и b параметров исходной модели ( и соответственно):
110
1
A
; .
B
B
Проверим,
выполняется
ли
ансамбль
предположений
о
характере
распределения случайных отклонений оцененной модели.
1). Математическое ожидание случайной составляющей:
Mt M [(1
1
1
t ) et ] (1
t ) Met 0.
Предположение выполняется.
2). Оценим Mt1 t2, t1t2 , т.е. ковариацию случайных:
Mt 1å 2 M [(1
1
t 1 )(1
1
t 2 )et 1et 2 ] (1
1
t1 )(1
1
t 2 ) Met 1 Met 2 0.
Предположение выполняется.
3). Дадим оценку дисперсии случайной, т.е. Dt:
Dt D[(1
1
t )et ] (1
1
t ) 2 Det (1
1
t) 2 2 .
Очевидно, что, предположение не выполняется, поскольку Dt1 Dt2. Таким
образом, оценки полученной модели являются смещенными.
Предполагается, что для следующих трендов подобный анализ читатель в
состоянии
провести
самостоятельно.
Для
упрощения
продолжим
преобразования трендов, не учитывая случайных воздействий.
7. Степенная функция f ( t ) t .
Имеем уравнение y t t . , логарифмируя его, имеем:
ln y t ln ln t .
Получилось уравнение линейной регрессии, где зависимой переменной
является ln yt , а независимой - lnt, свободным членом - ln . Параметр
получаем, зная оценку ln .
t
8. Показательная функция f (t ) (1 ) .
t
Имеем уравнение y t (1 ) , логарифмируя которое, получим:
111
ln y t ln t ln(1 ) .
Имеем уравнение линейной регрессии, где зависимой переменной является
ln yt , независимой - t. Параметры и получаем, зная оценки
ln и ln( 1 ) .
t
9. Обобщенная экспонента f (t ) exp( ( )d ( ) .
0
t
( ) может
Имеем уравнение y t exp( ( )d ( ), где
быть линейной,
0
параболической или другой функцией. Пусть это линейная функция:
( ) .
t
Имеем:
y t exp( ( )d ( ) e
t t 2
2
.
Логарифмируя
последнее
0
уравнение, получаем:
ln yt ln t t 2 .
2
Это уравнение линейной регрессии, где зависимой переменной является ln y t , а
независимыми - t и t2. Применяя МНК, получаем оценки ln , и
, откуда
2
находим оценки исходных параметров.
10. Кривая Гомперца: f (t )
Имеем
уравнение
t
yt t ,
.
логарифмируя
которое
получаем:
ln y t ln t ln .
Это еще не линейная регрессия. Но если бы было известно значение ,
зависимой переменной можно было бы принять ln yt , а независимой - t , т.е.
получилась бы линейная регрессия. На этом основан алгоритм нахождения
параметров. Изменяя значения (остальные параметры находят при помощи
МНК), добиваются минимизации суммы квадратов отклонений от регрессии.
11. Логистическая кривая: f (t )
.
1 e t
112
Имеем уравнение
yt
, откуда путем очевидного преобразования
1 e t
получаем:
1
1
e t .
yt
Аналогично предыдущему тренду, фиксируя , получаем линейную регрессию,
где зависимая переменная – 1/yt, а независимая - e
t
. Изменяя параметр
(остальные параметры находят при помощи МНК), добиваются минимизации
суммы квадратов отклонений от регрессии.
Таким образом, имея эффективное программное обеспечение МНК для
линейной регрессии, можно построить любой выбранный тренд.
Построение интервального прогноза на нелинейных трендовых моделях
При использовании в качестве аппроксимирующих функций нелинейных
трендовых зависимостей, сведенных предварительно к линейному виду,
исследователь должен четко осознавать, что оценки параметров тренда, как и
оценка прогноза, требуют осознанной и грамотной их интерпретации [25, 26,
68].
Если для национального дохода Yt (или любого другого показателя)
построена трендовая модель вида произвольного вида, то прогнозирование его
среднего значения в любой момент времени T – это просто вычисление f(T).
Однако этого недостаточно. Необходимо сопроводить прогноз среднего
значения расчетом доверительного интервала (с заданной доверительной
вероятностью). Поскольку любой тренд восстанавливается при помощи
сведения к линейной регрессии, для вычисления доверительного интервала
следует воспользоваться известной формулой.
113
Это можно пояснить на примере построения доверительного интервала
прогноза, например, если в качестве тренда использована показательная
t
функция Yˆt f (t ) (1 ) .
Как уже было показано, ее параметры оценивают сведением к линейной
регрессии при помощи логарифмирования:
ln Yˆt ln t ln( 1 ).
По формуле (2.3.6) находим доверительный интервал для ln YT (а не для
YT ). Окончательно имеем:
1
(T t ) 2
1 3(2T N 1) 2
sp s 1 N
s 1
.
N
N
N ( N 2 1)
2
(t t )
t 1
Тогда в соответствии с формулой (2.3.1)
ln YT [ln T ln( 1 ) t q s p ; ln T ln( 1 ) t q s p ],
откуда
YT [exp(ln T ln( 1 ) t q s p ); exp(ln T ln( 1 ) t q s p )].
Действуя аналогично, можно найти формулы доверительных интервалов
и для других трендов [68, c.173-175].
2.3.4. Выделение сезонной составляющей временных рядов
Часто на практике встречаются процессы, носящие периодический
характер и связанными с определенной циклической природой тех или иных
социально-экономических
соответствующих
определяемых
явлений. После формального
исходных
общей
уровней
долгосрочной
статистического
тенденцией
исключения
из
ряда
уровней,
развития
(тренда),
исследователь в качестве материала своего изучения имеет остаток по ряду
наблюдений – вектор еt. Ранее мы полагали его случайно распределенным с
известным математическим ожиданием и дисперсией (Mеt = 0, Det 2 ). Часто
114
даже визуального наблюдения за распределением уровней ряда бывает
достаточно, чтобы заметить тенденции в их разбросе, колебания относительно
некого среднего уровня. В этой связи может возникнуть мысль о наличии в
ряду остатков возможной зависимости от фактора времени t, которая может
фактически носить как циклическую, так и сезонную природу. Однако,
несмотря на различную природу такого рода явлений, на принципиальную
разницу их генезиса, формально мы можем попытаться идентифицировать
произвольные колебательные движения социально-экономических процессов с
помощью
схожего
аппарата
формализации,
в
частности,
попытаться
представить изучаемый ряд (для дальнейшего рассмотрения примем вновь
обозначение yt) разложением Фурье.
Пусть имеется N наблюдений над переменной Y (для упрощения
дальнейших выкладок примем, что N - четное).
m – период колебаний, т.е. промежуток времени, через который наша
искомая функция в точности повторит свои значения.
За исходное примем, что в N укладывается целое число (h) периодов
длины m, т.е. h = N/m или N=hm. Например, если аналитик изучает динамику
некоторого явления, описанного показателем Y
за три года с помесячной
регистрацией статистики, то в наших обозначениях это запишется следующим
образом: длина наблюдаемого ряда N=36 месяца; предполагаемая длина
периода m=12; целое число периодов наблюдаемой статистики h=3).
Заданную
числовую
последовательность
Yt
можно
попытаться
представить в виде:
yt = f(t) + t, где
t – случайная составляющая изучаемого ряда (Mt = 0, D t 2 );
f(t) – некоторая периодическая функция с периодом m.
Утверждение. Если числовая последовательность y1, y2, … yN имеет
период m, тогда эту последовательность можно представить как сумму m
периодических тригонометрических функций, имеющих период m и меньше.
Иначе говорят: функция f(t) разложима в ряд Фурье вида:
115
m 1
f (t ) i i (t )
(2.3.7),
i 0
где i(t) – i-я тригонометрическая функция.
Перед тем, как провести данное преобразование, сделаем ряд замечаний,
касающихся особенности представления данной функции f(t).
1). Заметим, что любой колебательный процесс можно представить в виде
синусоиды общего вида:
f(t) = sin(t + ),
где - амплитуда; - частота; - фаза.
Попытаемся без потери информативности представления несколько
упростить вид исходного представления.
1. Для ликвидации начального фазового сдвига, синусоиду можно представить
в виде аддитивного разложения на элементарные функции косинуса и синуса
той же исходной частоты, т.е.
sin( t ) a1 sin t a2 cos t , где
a1 = cos; a2 = sin;
a 12 a 22 2
.
2. Рассматривая пары функций косинуса и синуса одинаковой частоты ,
представим её как
2j
m
, где j=0, 1…
m
2
-
целые
номера
гармоники.
Сами сопряженные тригонометрические функции в свою очередь примут
следующий вид: sin
период
sin(
2j
2j
t . Эти тригонометрические функции имеют
t , cos
m
m
j
m
(и рабочую частоту ), в чем не трудно убедиться:
m
j
2j
2j
m
(t )) sin
t,
m
j
m
cos(
2j
2j
m
(t )) cos
t.
m
j
m
116
Итак, рассмотрим представленные функции (2.3.7) с учетом возможных
отмеченных выше преобразований 1 и 2, а также учитывая влияние на
модификацию преобразования номера текущей гармоники j:
Для первой гармоники ряда j=0 имеем:
sin
2 0
t 0;
m
cos
2 0
t 1.
m
Таким образом, первая пара компонент функции (2.3.7) примет
вырожденный вид: 0(t) = 1.
Далее для гармоник j=1, 2,
m
1 представление компонент стандартно (всего
2
(m-2) функций) и имеет вид:
2 j (t ) sin
2 j
t;
m
2 j 1 (t ) cos
2j
t.
m
Так, например, при j=1 имеем:
2
t;
m
2
1 (t ) cos t и т.д.
2 (t ) sin
m
В последнюю гармонику с номером j
sin
2 m
t 0;
m 2
cos
2 m
t cos t (1) t .
m 2
m
войдут функции:
2
Таким образом, последняя m-я пара компонент функции (2.3.7)
принимает так же вырожденный вид:
m-1(t) = (-1)t.
Т.о., окончательно имеем регрессию на тригонометрические функции
следующего вида:
117
m 1
m
1
2
i 0
j 1
f (t ) ai i (t ) a0 [a 2 j 1 cos
2j
2j
t a 2 j sin
t ] a m1 (1) t t ;
m
m
(2.3.8),
где
t – случайная составляющая ряда (Mt = 0, D t 2 );
Нетрудно показать, что если длина периода - m нечетна, то, слагаемое
a m 1 ( 1) t функции (2.3.8) исчезает.
В результате всех преобразований мы получили линейную регрессию на
элементарные тригонометрические функции синуса и косинуса, где а0…аm-1 –
неизвестные параметры, а cos(t) и sin(t) – независимые вектора матрицы
входных переменных задачи.
Для оценки параметров модели (2.3.8) воспользуемся известным
соотношением:
a (Z T Z ) 1 Z T Y
(2.3.9),
где
Z – расширенная матрица экзогенных переменных задачи;
Y – вектор эндогенной переменной задачи.
Для большей наглядности дальнейших преобразований полезно представлять
содержательно структуру данных матрицы Z, изобразим ее на рисунке 3
.
j0
j 1
j2
1
1
m
1
N
1
1
m
1
2 1
1
m
2 1
cos
2
m
cos
cos
2 1
m
m
2 1
1
m
2 1
sin
2
m
sin
sin
2 1
m
m
j
m
2
2 2
1
m
2 2
cos
2
m
cos
cos
2 2
m
m
2 2
1
m
2 2
sin
2
m
sin
sin
2 2
m
m
1
1
1
2 1
2 1
2 2
2 2
cos
( N m 1) sin
( N m 1) cos
( N m 1) sin
( N m 1) 1
m
m
m
m
2 1
2 1
2 2
2 2
cos
( N m 2) sin
( N m 2) cos
( N m 2) sin
( N m 2) 1
m
m
m
m
cos
2 1
N
m
sin
2 1
N
m
cos
2 2
N
m
sin
2 2
N
m
1
Рисунок 3. Структура расширенной матрицы экзогенных переменных Z
118
Для применения стандартной процедуры оценки параметров линейной
регрессии (2.3.9) следует найти значения ZTZ и ZTY. Зная структуру матрицы
экзогенных переменных Z, нетрудно заметить, что отыскание этих значений
сводится к поиску значения сумм:
2j
2k
t cos
t
m
m
N
cos
t 1
2j
2k
t sin
t
m
m
N
sin
t 1
N
cos
t 1
j, k 1, m2 .
2j
2k
t sin
t
m
m
Найдем их. Для этого воспользуемся известными соотношениями для
определения экспонент с комплексным аргументом:
e i cos i sin ;
e i cos i sin .
Следствием приведенных соотношений являются известные формулы
Эйлера:
cos 12 (e i e i );
i sin 12 (e i e i ).
Для проведения дальнейших вычислений определим сумму:
2j
2j
2j
m
i
t
i
t
2j
2k
2k
1 i t
S cos
t[cos
t i sin
t ] (e m e m ) e m
m
m
m
t 1
t 1 2
m
1 m i
e
2 t 1
m
2 ( j k )
t
m
S1 e
i
1 m i
e
2 t 1
2 ( j k )
t
m
2 ( k j )
t
m
m
1
( S1 S 2 )
2
S2 e
;
t 1
i
2 ( k j )
t
m
,
где
.
t 1
Рассмотрим S1 и S2 (значения этих сумм зависят от соотношения
значений индексов гармоник j и k). Заметим также, что сумма S может состоять
из двух частей: вещественной и мнимой.
1). Пусть jk.
Представим S1 в виде суммы m членов геометрической прогрессии
S1 e
i
2 ( k j )
m
e
i
2 ( k j )
2
m
.... .
Очевидно, что перед нами геометрическая прогрессия с начальным членом
e
i
2 ( j k )
m
и таким же значением знаменателя. Следовательно, её сумму можно
представить следующим образом:
119
S1 e
2 ( k j )
i
m
2 ( k j )m
i
1 e m
2 ( k j )
1 ei m
(2.3.10).
В силу того, что числитель суммы (2.3.10) дроби равен 0, значение S1=0.
Аналогично, не трудно показать, что S2=0. Следовательно, в случае, когда jk
S=0.
2). Для ситуации одинаковых индексов гармоник j и k, при условии, что
0 j , k
m
m
легко получаем: S1=0; S2=m, т.е. S .
2
2
3) Если индексы гармоник равны и имеют их крайние значения, т.е. j k | m 2 ,
0
имеем:
S 2 m;
m
S1 e
i
2
m t
m
t 1
m
m
t 1
t 1
e i 2t [cos 2t i sin 2t ] m
.
Таким образом, S=m.
Итак, окончательно получим:
S
k j;
0,
m
2
, 0(k j ) m2 ;
m
k j | 0m .
2
Т.к. во всех случаях (1), (2), (3) значения S – вещественные, а не мнимые числа,
то
S вещевств.
2j
2k
cos
t cos
t
m
m
t 1
N
N
S м ним. cos
t 1
jk:
0 j k m2 :
j k |m
2j
2k
t sin
t0
m
m
Кроме того, нетрудно показать, что
0
2
k , j.
S веществ h 0 0;
S веществ h m2
S
веществ
N
2
;
h m N.
120
N
2j
2j
2 0
t cos
t cos
t 0.
m
m
m
t 1
N
cos
t 1
.
N
sin
t 1
N
2j
2j
2 0
t sin
t cos
t0
m
m
m
t 1
Аналогично приведенным выше вычислениям, можем получить:
2j
2k
sin
t
cos
t
m
m
t 1
N
Все
сделанные
jk:
0;
0 j k m2 :
N
2
j k |m
0
;.
0.
2
выше
вычисления
дают
возможность
легко
воспользоваться формулой (2.3.9) для оценки параметров тригонометрического
тренда с помощью метода наименьших квадратов. При этом промежуточные
расчеты дают возможность получить следующие значения:
1
T
(Z Z )
0
1N
2N
;
0
1
N
Таким образом, если
( Z T Y ) 1
N
yt
t 1
N
2
y t cos( m t )
t N1
2
y t sin( m t )
.
t 1
2 ( m2 1)
N
y t sin( m t )
t 1
N
t
y t (1)
t 1
a0
a1
a ( Z T Z ) 1 Z T Y , то
2
a
m 1
в
окончательном
виде
значения вектора оценок параметров тригонометрического тренда (2.3.8)
принимает следующий вид.
a0
1
N
N
y
t 1
t
;
121
N
a1
2
N
a2
2
N
y
t
cos( 2m t );
y
sin( 2m t );
t 1
N
t 1
t
…
2
N
a 2 j 1
2
N
a2 j
N
y
t 1
N
y
t 1
t
t
cos( 2mj t );
sin( 2mj t );
…
1
N
a m 1
N
y (1)
t 1
t
t
.
Проведем дисперсионный анализ результатов нашего эконометрического
оценивания. Попытаемся найти ответ на вопрос о существенности, построенной
регрессионной модели в целом и отдельных ее параметров.
Сформулируем
основную
оцениваемую
гипотезу
следующим
образом:
H 0 : j 0 j , альтернативную: H 0 : j 0 j . Таким образом, если
статистическое
тестирование покажет
принятие нулевой
гипотезы,
то
циклическая составляющая временного ряда может быть признана не
существенной, т.е. в практике построения прогноза ей можно пренебречь.
Ранее было показано, что Qy2 Q2 Qy2ˆ , где
N
Qy2 ( yt y ) 2 ,
t 1
N
Q ( yt yˆ t ) 2 ,
t 1
N
Q y2ˆ ( yˆ t y ) 2 .
t 1
С учетом того, что без потери информативности вектор эндогенной
переменной в рамках рассматриваемой модели может быть центрирован с тем,
чтобы
1
N
y
t
0, y 0 , в нашем случае имеют место следующие соотношения:
122
Q y2 Y T Y
Q 2 Y T Y Yˆ T Yˆ .
,
т.е.
Q Yˆ Yˆ
Проверку H0 можно осуществить с помощью известного критерия
2
yˆ
T
Фишера, для этого следует сравнить значения его расчетного и критического
уровней для заданной величины уровня значимости , т.е.:
Q y2ˆ Q 2
:
F ( 1 (m 1); 2 ( N (m 1) 1) ( N m)) и F
.
кр
p
1 2
Если Fp > Fкр, то H0 отвергается, т.е. циклическая составляющая существенна и
результаты оценивания циклической составляющей временного ряда могут
быть использованы для изучения ее прогностической пригодности.
Покажем, как можно практически оценить Q ŷ2 с учетом ранее полученных
результатов оценивания сумм рядов синусов и косинусов соответствующих
частот.
N
m
1
2
t 1
j 1
Q [a 0 (a 2 j 1 cos
2
yˆ
2j
2j
t a 2 j sin
t ) a m 1 (1) t ] 2
m
m
N
[a 02 S12 S 22 a m2 1 2a 0 S1 2a 0 S 2 2a 0 a m 1 (1) t 2S1 S 2 2 S1 a m 1 (1) t 2S 2 a m 1 (1) t ]
t 1
N
[a 02 S12 S 22 a m2 1 ].
t 1
Отдельно оценим значения компонент полученной суммы.
N
a
1.
t 1
Na02 ;
2
0
N
2.
a
t 1
2
m 1
N
N a m2 1 ;
N
m
1
2
t 1
j 1
3. S [ a 2 j 1 cos
t 1
2
1
m
1
2
2j 2
t]
m
m
1
2
2j
2j
2k
[ a 2 j 1 cos
t 2 a 2 j 1 a 2 k 1 cos
t cos
t]
m
m
m
t 1 j 1
jk
N
m
1
2
a
j 1
N
2
2
m
m
1
2
a
j 1
1
N
2
2j
2j
2k
2
cos
t
2
a
a
t cos
t
2 j 1 2 k 1 cos
m
m
m
t 1
j k
t 1
N
2
2 j 1
2
2 j 1
2
.
N
N
2
Аналогично не трудно показать, что S 2
2
j 1
m
1
2
a
j 1
2
2j
.
123
Таким образом, окончательно сумма квадратов отклонений циклической
составляющей от средней по ряду составит:
Q N (a a
2
yˆ
2
0
2
m 1
N
)
2
m
1
2
(a
j 1
2
2 j 1
a 22 j ).
Провести проверку на значимость отдельных коэффициентов функции
циклического тренда можно, например, на базе t-критерия Стьюдента либо
критерия
2.
Как
проверить
на
значимость
частные
коэффициенты
циклического тренда?
1). Проверка по t-критерию осуществляется традиционным способом, путем
сравнения расчетного и критического уровней t-статистики для интересующего
расч
i-го параметра уравнения регрессии т.е., t i
ai
кр
и t ( N m) .
S ai
2). Проверка на значимость всех коэффициентов, кроме 0-го и (m-1)-го
слагаемого функции (2.3.8) может осуществляться путем оценивания
существенности соответствующей j-й гармоники.
2
2
Проверка основной гипотезы Но: j=0 ( j a 2 j 1 a 2 j . ) проводится на
основе критерия 2 (
( Fj
расч
N 2j
4S
2
; F
кр
2
расч
2
N j
2
2 ; кр (2) ) или критерия Фишера
2 S
(2; N m) ).
Построение доверительного интервала прогноза на основе циклического
тренда на заданный период tp требует оценки дисперсии случайной по
динамическому ряду yt, а также дисперсии тренда, т.е.
Dyˆ p (t p ) D(Yˆ (t p ) t ) D yˆ y p D t .
1). Дисперсия случайной по динамическому ряду yt оценивается следующим
образом:
N
Q2
D t 2 ; 2 S 2
N m
( yˆ
t 1
t
yi ) 2
N m
.
2). Вычислим дисперсию прогноза по тренду:
124
m
1
2
m
1
p
2j p 2
2j p
Dyˆ (t ) D[a0 (a 2 j 1 cos
t a 2 j sin
t (1) t a m1 ]
m
m
j 1
j 1
p
m
1
2
m
1
2
2j p
2j p
Da 0 cos
t Da 2 j 1 sin 2
t Da 2 j Da m1 .
m
m
j 1
j 1
С учетом полученных ранее значений оценок циклического тренда
2
получим следующий результат:
Da 0 D[
1
N
Da m 1 D[
Da 2 j 1
N
2
t 1
N
yt ]
1
N
2
D[
N
N
.
(1) t yt ]
p
t 1
2
N
.
2j
4
y t cos
t] 2
m
N
t 1
N
Аналогично Da 2 j
2j
2 2
cos
t Dy t
.
m
N
t 1
N
2
2 2
.
N
Таким образом, дисперсия модели прогнозирования может быть
представлена следующим образом:
2
m 1
m 1
2 2 2
2 2 2
2 2
2 2j p
2 2j p
ˆ
D[Y (t )]
cos
t
sin
t
.
N
N t 1
m
N t 1
m
N
h
p
Тогда общая дисперсия ошибки прогноза примет вид:
2
1
p
ˆ
D[Y (t )]
2 2 (1 ).
h
h
Окончательно оценку доверительного интервала
прогноза
можно
провести следующим образом:
1
Y p (t p ) Yˆy (t p ) t 2 ( N m) S 1 .
h
2.3.5. Выделение циклических составляющих временных рядов
Далеко не всегда значения временного ряда формируются только под
воздействием каких-либо факторов. Часто бывает, что развитие того или иного
процесса обусловлено его внутренними закономерностями, а отклонения от
125
детерминированного процесса вызваны ошибками измерений или случайными
флуктуациями или т.н. циклами.
Сталкиваясь с понятием «циклическая составляющая временного ряда»
обычно неискушенные исследователи представляют себе четко прописанную
модель, генерирующую колебания “вверх и вниз”, так называемую «жестко
заданную циклическую модель». Безусловно, такие циклы имеют место, но в
общем случае циклические колебания в бизнесе, экономике, управлении и
финансах обычно далеко не так жестко предопределены. Фактически, когда в
экономической динамике говорят о циклах, то имеется в виду более общее,
всеобъемлющее понятие цикличности. Под ним может пониматься любой вид
динамики, не захваченной трендами или моделями сезонной составляющей.
Циклы, согласно самой широкой интерпретации, могут представлять
собой колебания показателя “назад и вперед”, но это не обязательно. Все, что
требуется - это наличие некоторой динамики, некоторое постоянство,
некоторый
способ,
связывающий
настоящее
с
прошлым
и
будущим
рассматриваемого процесса или явления. Циклы присутствуют в большинстве
динамических рядов, с которыми мы сталкиваемся, и очень важно, чтобы
исследователи
знали,
как
моделировать
механизм
их
генерации
и
прогнозировать ожидаемые уровни временных рядов, потому что часто их
история содержит информацию относительно их будущего.
Особый интерес при этом представляют процессы, находящиеся в
«переходном»
режиме,
т.е.
процессы,
являющиеся
по
существу
«стационарными», но на исследуемом промежутке времени проявляющие
свойства нестационарного временного ряда, что объясняется далекими от
стационарного режима начальными условиями. В ситуациях, когда временной
ряд
формируется
неслучайных
под
факторов,
воздействием
анализ
некоторого
отдельных
набора
временных
случайных
рядов,
и
как
результирующих, так и факторных, имеет огромное значение. Это необходимо
для правильной идентификации моделей, которые строятся по информации об
126
исследуемых процессах (векторные авторегрессии, модели коррекции ошибок,
динамические модели с распределенными запаздываниями и т.п.).
Тенденция и сезонная динамика достаточно просты в формализации, так
что мы можем охватить их достаточно незамысловатыми моделями. Это,
прежде всего, объясняется четкими гипотезами относительно характера
динамик названного типа, их причинных обоснований. Циклическая динамика,
несомненно, более усложнена. Из-за широкого разнообразия примеров циклов,
их причинности, наслоений эти модели имеют более сложную структуру [11,
21, 42, 61, 75, 76, 77, 78]. Таким образом, мы разделим наше обсуждение на три
части: обсудим методы формализации и изучения природы циклических
колебаний, обсудим модели циклов, и после этого покажем, как использовать
эти модели, чтобы спрогнозировать будущие уровни динамических рядов.
Приступая к анализу дискретного ряда наблюдений, расположенных в
хронологическом порядке, следует в первую очередь убедиться, действительно
ли в формировании значений этого ряда участвовали какие-либо факторы,
кроме чисто случайных. Под «чисто случайными» понимаются те случайные
факторы, под воздействием которых генерируются последовательности
взаимно не коррелированных и одинаково распределенных случайных величин,
обладающих не зависящими от времени средними значениями и дисперсиями.
Для этого следует предварительно протестировать исходные данные с
помощью соответствующих гипотезы, например, с помощью одного из
«критериев серий», критерия Аббе и др.
Если в результате проверки статистической гипотезы выяснилось, что
имеющиеся наблюдения взаимно зависимы, то приступают к подбору
подходящей модели для этого ряда. Множество моделей, в рамках которого
ведется этот подбор, ограничивается обычно следующими классами:
- стационарных временных рядов (которые используются, в основном, для
описания поведения случайных остатков);
- нестационарных временных рядов, которые являются суммой тренда и
стационарной составляющей ряда;
127
- нестационарных временных рядов, имеющих стохастический тренд,
который можно нивелировать путем перехода от ряда уровней к ряду
разностей первого или более высоких порядков.
Отметим, и это чрезвычайно важно, что далее под временным рядом мы
будем понимать компоненты исходного ряда типа (2.3.0), очищенные от
трендовой и желательно сезонной составляющих. Т.е. мы хотим подробнее
исследовать характеристики оставшихся компонент временного ряда и
попытаться, если это будет возможно спрогнозировать его будущую
траекторию.
2.3.5.1. Понятие о стационарных временных рядах
Как ранее уже отмечалось реализация временного ряда (остаточного) –
это выборка типа {…, y-2, y-1, y0, y1, y2, …}. Обычно наблюдения упорядочены
во времени — отсюда следует и название: временной ряд, хотя при более
тщательном подходе это не всегда так.
В теории его реализация начинается в неопределенном прошлом и
продолжается до неопределенного будущего, но на практике, очевидно,
наблюдаемые данные - это конечное подмножество реализации временного
ряда y1, …, yN, которое называют выборочной траекторией. И если бы
основная вероятностная структура ряда со временем изменялась, мы были бы
обречены — не было бы никакого способа точно предсказать будущее,
основываясь на прошлом, потому что законы, действующие в будущем
отличались бы от действующих в прошлом. Если мы хотим строить прогнозы
значений временного ряда, мы как минимум желаем, чтобы его математическое
ожидание и ковариация (то есть ковариация между текущими и прошлыми
значениями) были постоянны во времени. В этом случае мы говорим, что
рассматриваемый ряд является стационарным в широком смысле. То есть,
стационарные в широком смысле временные ряды yt характеризуются тем, что
128
их средние значения Myt, дисперсии Dyt и ковариации () = M[(yt Myt)(yt+
Mxt+)] не зависят от t, для которого они вычисляются.
Стохастический
процесс
называется
строго
стационарным
(или
стационарным в узком смысле), если его свойства не зависят от изменения
начала отсчета времени. Иными словами, если совместное распределение
вероятностей m наблюдений y(t1 ), y(t 2 ),..., y(t m ) , сделанные в любые моменты
времени
t 1 , t 2 ,..., t m ,
такое
y(t1 ), y(t 2 ),..., y(t m )
же,
как
сделанных
и
в
для
m
наблюдений
моменты
времени
t 1 , t 2 ,..., t m [21].
Поэтому, чтобы дискретный процесс был строго стационарным, взаимное
распределение любой совокупности наблюдений не должно изменяться при
сдвиге всех времен наблюдений вперед или назад на любое целое число k.
Другими словами, свойства строго стационарного временного ряда не
меняются при изменении начала отсчета времени.
Рассмотрим свойство стационарности временных рядов подробнее.
Первое требование стационарности ряда – это постоянство среднего значения
ряда во времени. Среднее значение ряда в момент t записывается как
Myt t .
Если среднее значение не изменяется с течением времени, как того
требует условие стационарности, то мы можем записать
My t
для любых t. Поскольку среднее не изменяется со временем, нет никакой
необходимости помечать его индексом времени.
Вторым
требованием
стационарности
ряда
является
постоянство
ковариации во времени. Для отслеживания этого факта используется понятие
автоковариационной функции. Автоковариация при сдвиге -это ковариация
для различных значений одного и того же временного ряда yt и y t . Значение
129
этой функции будет, конечно, зависеть от , но может также зависеть от t,
поэтому в общем случае пишут
(t , ) cov( y t , y t ) M ( y t )( y t ) .
Если ковариация не зависит от времени, как того требует условие
стационарности, а зависит только от величины сдвига по времени , то мы
можем записать (t , ) ( ) , для любого t.
Автоковариационная функция важна, потому что она отражает основное
понятие
циклической
автоковариационную
динамики
структуру
в
ряда,
стационарном
мы
узнаем
о
ряде.
ее
Исследуя
поведении
в
изменяющихся условиях. Это весьма удобно сделать, исследуя график
поведения автоковариации как функции от . Обратим внимание на то, что
автоковариационная функция симметричная; то есть ( ) ( ) для всех .
Как правило, мы рассматриваем только неотрицательные значения .
Симметрия отражает тот факт, что автоковариация стационарного ряда зависит
только от смещения. Не имеет значения, смещаемся мы вперед или назад.
Обратите внимание также, что (0) = D (yt, yt) = D (yt).
Еще одно специальное требование стационарности – требование
конечности дисперсии ряда (автоковариация при нулевом смещении (0) ).
Можно показать, что никакая автоковариация не может быть больше по
модулю чем
(0) ,
так если
(0)
< , то также ведут себя и все остальные
автоковариации.
Может показаться, что требования для стационарности весьма строгие и
не предвещают ничего хорошего для наших прогностических моделей, почти
все из которых требуют, так или иначе, стационарность. На самом деле, многие
экономические,
деловые,
финансовые
ряды
и
т.д.
–
не
являются
стационарными. Тенденция к росту, например, соответствует устойчиво
увеличивающемуся среднему значению, а сезонность предполагает изменение
130
среднего значения в зависимости от периода времени года. Оба случая –
примеры нарушения стационарности.
Но хотя многие ряды не стационарны, часто бывает возможно работать с
моделями, которые дают специальную интерпретацию нестационарным
компонентам вроде тенденции и сезонности, так, чтобы циклический
компонент, вероятно, оставался стационарным. Мы часто принимаем эту
стратегию. Для этого с помощью простых преобразований можно привести
нестационарные ряды к стационарному виду. Например, многие ряды, которые
являются определенно нестационарными в абсолютных единицах (уровнях),
выглядят стационарными в относительных (темпах роста). Для этого
используются
специальные
процедуры,
именуемые
интегрированием
динамических рядов.
Кроме того, хотя стационарность требует, чтобы средние и ковариации
были устойчивыми и конечными, она не накладывает никаких ограничений на
другие характеристики распределения ряда, например, асимметрию и эксцесс.
По этой причине, такую стационарность часто называют стационарностью
второго порядка, или слабой стационарностью. Таким образом, работаем ли мы
непосредственно в уровнях и включаем специальные компоненты для
нестационарных
элементов
наших
моделей,
или
мы
работаем
на
преобразованных данных типа темпов роста, предположение о стационарности
не столь нереалистично, как это может показаться.
Вспомним, что корреляция между двумя случайными переменными x и у
(коэффициент парной корреляции) определяется как
corr (x, y)=rxy =
cov( x, y)
x y
.
То есть корреляция переменных x и y – это просто их ковариация,
"нормализованная", или "стандартизированная", произведением стандартных
отклонений x и y. И корреляция, и ковариация - меры измерения тесноты
линейной связи между двумя случайными переменными. Тем не менее,
корреляция часто бывает более информативна и легко интерпретируется,
131
потому что конструкция коэффициента корреляции гарантирует, что corr(x, y)
[-1,1], в то время как ковариация между теми же самыми двумя случайными
переменными может принимать любое значение. Корреляция, кроме того, не
зависит от единиц, в которых переменные x и у измерены, тогда как ковариация
зависит. Вследствие лучшей интерпретируемости корреляции по сравнению с
ковариацией, исследователи часто работают с корреляцией охотнее, чем с
ковариацией, между yt и yt-.. То есть работа с функцией автокорреляции, ,
предпочтительней, чем
с функцией
( ) .
автоковариации,
Функцию
автокорреляции можно получить, разделив автоковариационную функцию на
дисперсию
( )
( )
, 0,1,2,...
(0)
Формула для автокорреляции - это обычная формула корреляции, только
для измерения тесноты взаимосвязи между членами одного и того же
временного ряда, т.е. между yt и yt-. Это объясняется тем, что дисперсия yt
равна (0) , и вследствие стационарности, дисперсия yt в любое другое время
yt- - также (0) . Таким образом,
( )
cov( y t , y t )
2 ( y t ) 2 ( y t )
( )
(0) (0)
( )
(0) .
Следует иметь в виду, что (0) = (0) / (0) = 1, потому что любой ряд
совершенно коррелируется сам с собой. Таким образом, только значения
автокорреляции при ненулевых сдвигах информируют нас относительно
динамической структуры рядов.
Наконец,
иногда
полезной
является
частная
автокорреляционная
функция, р(), так как р() - только коэффициент при yt- в совокупности
линейной регрессии yt на yt-1.,…, yt-. Такие регрессии именуют авторегрессиями, потому что переменная регрессирована на своих же лаговых
значениях. Легко видеть, что автокорреляция и частная автокорреляция, хотя и
132
связаны, но отличаются важным образом. Автокорреляции - только "простые"
или "регулярные" корреляции между yt и yt-. Частные автокорреляции, с другой
стороны, измеряют тесноту взаимосвязи между yt и yt- при устранении влияния
промежуточных членов yt-1 ,…, yt-+1 этого ряда; то есть они измеряют
“очищенную” корреляцию между yt и yt-.
Можно
показать,
что
любой
стационарный
ряд
должен
иметь
автокорреляционную и частную автокорреляционную функции, которые каким
либо образом приближаются к 0 при увеличивающемся смещении.
Понятие белого шума в моделях динамики временных рядов
Перед
тем,
как
оценить
параметры
прогностической
модели
временного ряда, необходимо изучить ее совокупные свойства, предполагая,
что выбранная модель значима. Простейшим из такого рода процессов
временного ряда является основным стандартным блоком, из которого можно
получить все остальные процессы. Записать его можно следующим образом yt
= t, где t (0, 2) и t некоррелирован во времени. В данной ситуации говорят,
что t, и следовательно, уt, последовательно (серийно) некоррелированны (т.е.
отсутствует корреляция внутри ряда). Во всех ситуациях, если не установлено
другое, мы
будем полагать, что 2 < . Такой процесс, с нулевым
математическим ожиданием, постоянной конечной дисперсией и отсутствием
корреляции внутри ряда, называется белым шумом с нулевым средним, или
просто белым шумом. Иногда для краткости пишут t WN (0, 2) и
следовательно уt WN (0, 2).
Следует обратить внимание, что t и аналогично yt, последовательно
некоррелированны, но они необязательно последовательно независимы, потому
что они необязательно распределены нормально. Если в добавлении к
последовательной некоррелированности уt является и серийно независимым,
тогда мы можем сказать, что уt – это независимый белый шум. Таким образом,
записывается
133
iid
yt ~ (0, 2 )
и говорится, что “значения уt независимо и одинаково распределены с нулевым
математическим ожиданием постоянной дисперсией”. Если в ряду уt
отсутствует корреляция и ряд распределен нормально, то из этого следует, что
ряд уt
также независимо распределен. Тогда мы говорим, что уt – это
iid
2
нормальный белый шум, или белый шум Гаусса: yt ~ N (0, ) . Мы читаем “ уt
– это независимо, одинаково нормально распределенный ряд с нулевым
средним и постоянной дисперсией” или просто “Гауссовский белый шум” [69].
Возмущения в регрессионной модели рассматриваются как белый шум
в том или ином роде. Тем не менее, имеется одно важное различие.
Возмущения в регрессионной модели не поддаются наблюдению, тогда как
временные ряды наблюдаемы. Позже, тем не менее, мы увидим, как все наши
модели для наблюдаемых рядов могут быть применены для не поддающихся
наблюдению переменных, таких как регрессионные возмущения.
Охарактеризуем динамическую стохастическую структуру белого шума
уt WN (0, 2). По построению, безусловное математическое ожидание уt будет
М(уt) = 0, а безусловная дисперсия D (уt) = 2.
Чтобы
полностью
понять
линейную
динамическую
структуру
стационарного процесса временного ряда, нам требуется рассчитать и
проверить его среднее значение и автоковариационную функцию. Так как
белый шум, по определению, некоррелирован во времени, все автоковариации
и, следовательно, все автокорреляции, равны нулю, за исключением значения,
зависящего от нулевого сдвига. Формально автоковариационная функция для
процесса белого шума записывается так
2 , 0
( )
.
0, 1
Автокорреляционная функция для этого процесса запишется следующим
образом
134
1, 0
.
0, 1
( )
Рассмотрим частную автокорреляционную функцию (ЧАКФ) для рядов
содержащих белый шум. Так как АКФ при сдвиге равном 0 всегда равна 1,
ЧАКФ при нулевом смещении принимает то же значение. Для белого шума, все
значения ЧАКФ при больших, чем нуль, сдвигах равны нулю. Это следует
опять-таки из того, что белый шум, по построению, серийно некоррелирован.
Совокупные регрессии yt на yt-1, или на yt-1 и yt-2, или на другие лаги, приводит к
нулевым коэффициентам, потому что процесс серийно некоррелирован.
Формально, ЧАКФ процесса белого шума записывается так
1, 0
.
0, 1
( )
Это снова вырожденная функция и выглядит так же как АКФ.
Из определения процесса типа «белый шум» ясно, что попытки
спрогнозировать независимый белый шум, обречены на провал. Так как мы не
можем сказать, что происходит с рядом, содержащим белый шум в любое
время, не связанное с прошлым, и аналогично, что происходит в будущем, не
связанным с настоящим или прошлым. Но понимание белого шума
чрезвычайно важно как минимум по двум причинам. Во-первых, процессы с
более ощутимой динамикой получаются простой трансформацией белого шума.
Во-вторых, ошибки прогноза на один период вперед должны быть белым
шумом. Так как, если эти ошибки не являются белым шумом, то они
коррелированны, что означает, что прогностическая модель построена
некорректно, а если это имеет место, то прогноз не может быть хорошим.
Поэтому важно понимание и распознавание этого явления.
Таким образом, мы охарактеризовали белый шум через его среднее
значение, дисперсию, АКФ и ЧАКФ. Другая характеристика динамики с
важными выводами для прогнозирования, включает среднее и дисперсию
процесса, обусловленные прошлой истории этого процесса. В частности, мы
135
часто можем понять сущность динамики процесса, анализируя его условное
математическое
ожидание,
которое
является
ключевым
объектом
для
прогнозирования. Для сравнения безусловных и условных математических
ожиданий и дисперсий, чтобы облегчить нашу попытку, рассмотрим пример
iid
независимого белого шума, yt ~ (0, 2 ) с теми же аргументами: безусловным
средним 0 и безусловной дисперсией 2. Рассмотрим теперь условные среднее
и
дисперсию,
где
исходными
ретроспективными
данными
является
информационное множество t-1, которое по существу содержит или прошлую
историю наблюдаемого ряда, т.е. t-1 = {…yt-1, yt-2,…}, или прошлую историю
возмущений ряда, т.е. t-1 = { t-1, t-2,… }. В сравнении с безусловными
средним и дисперсией, которые должны быть постоянными, согласно
требованиям стационарности, условные среднее и дисперсия необязательно
постоянные, и в общем случае мы должны считать их непостоянными. Для
независимого белого шума условное среднее имеет вид М(yt | t-1) = 0,
а условная дисперсия выглядит как
D(yt | t-1) = М[(yt – М(yt | t-1))2 | t-1] = 2.
Условные и безусловные дисперсии и средние идентичны для рядов,
содержащих белый шум. Рассматриваемый процесс не содержит динамики и,
следовательно, нет динамики в условных моментах, которую можно
моделировать.
Понятие оператора лагового сдвига
Оператор сдвига и связанные с ним структурные компоненты – это язык,
на котором описываются прогностические модели [3, 56, 58, 69]. Оператор
сдвига, обозначим его символом L, оперирует рядом, вводя в него запаздывания
(лаги), так что
Lyt = yt-1.
Аналогично,
136
L2yt = L(L(yt)) = L(yt-1) = yt-2
и так далее. Однако в общем случае будем говорить, что речь идет об
использовании полиномов от оператора сдвига. Полином от оператора сдвига
степени m - это линейная функция различных степеней L до m-й степени
B (L) = b0 + b1L + b2L2 + … +bmLm.
Пример полинома от оператора сдвига m-й степени, оперирующего с рядами,
напрмер, Lm yt = yt – m. Хорошо известный оператор разности первого порядка
- это в действительности полином первой степени от оператора сдвига:
y t
= (1
– L)yt = yt – yt – 1.
Например, если необходимо рассмотреть полином второй степени от
оператора сдвига вида (1 + 0.78L + 0.65L2), оперирующего с рядом yt.
Эквивалентно это условие можно записать как равенство
(1 + 0.78L + 0.65L2) yt = yt + 0.78 yt-1 + 0.656 yt-2 ,
которое представляет собой взвешенную сумму, или распределенный лаг,
настоящих и прошлых значений ряда yt.
Все ранее рассмотренное относится к полиномам конечной степени.
Полином бесконечного порядка можно записать так
B(L) = b0 + b1L + b2L2 + … =
b L .
i
i 0
i
Таким образом, например, для представления распределенного лага
текущих и прошлых возмущений бесконечного порядка, можно записать
B(L) t = b0t + b1t-1 + b2t-2 + … =
b
i 0
i t i
.
Модели, содержащие бесконечное количество распределенных лагов,
занимают центральное место в моделировании и прогнозировании временных
рядов. Это находит выражение в так называемой теореме Уолда [39, 61, 74].
Многие
модели
временных
рядов
не
противоречат
условиям
стационарности. Так что, если мы знаем, что ряд стационарен, это ещё не дает
137
четкого ответа на вопрос, какой вид модели мы можем применить для описания
динамики ряда. Тренд и сезонные модели, которые мы уже изучили, здесь
неприменимы,
так
они
описывают
специфические
нестационарные
компоненты. Исследователю необходима подходящая модель для имитации
стационарных остатков динамического ряда. Теорема о представлении Уолда
указывает на соответствующий вид модели.
Теорема. Пусть {yt} будет любым стационарным процессом с нулевым
средним, не содержащим никаких детерминированных компонент. Тогда этот
процесс можно записать как
yt = B(L)t =
bi t i , где t WN (0, 2), при b0 = 1 и
i 0
b
i
i 0
2
.
Иначе говоря, моделью для любого стационарного ряда является
бесконечно распределенный лаг белого шума, называемый представлением
Уолда. Такое представление ряда называется - общим линейным процессом.
Общим, потому что любой стационарный ряд может быть записан в такой
форме, а линейный, потому что представление Уолда изображает ряд в виде
линейной комбинации его инноваций (т.е. его предшествующих значений).
Ввиду особой важности для прогнозирования общего линейного процесса
рассмотрим его условные и безусловные моменты. Зная средние и дисперсии
по ряду, мы легко можем получить его безусловные моменты, т.е.
математическое ожидание ряда
М(yt) = М bi t i = bi М t i =
i 0
i 0
b 0 = 0
i
i 0
и дисперсию ряда
D(yt) = D bi t i = bi 2 D( t i ) =
i 0
i 0
b
i 0
i
2
2
Условное математическое ожидание ряда определяется как
М(yt | t-1) = М(t | t-1) +b1М(t-1 | t-1) + b2М(t-2 | t-1) +….=
= 0 + b1t-1 + b2t-2 +…=
b
i 0
i t i
2
b
i 0
i
2
.
138
и условная дисперсия ряда
D(yt | t-1) = М[ (yt – М(yt | t-1))2 | t-1] = М(t 2| t-1) = М(t 2) = 2.
Существенным является то, что условное среднее смещается во времени в
ответ на изменение информационного пространства. Модель фиксирует
изменения процесса, и изменяющееся среднее – это один из способов
интегрировать эти изменения. Важная цель при моделировании временных
рядов, особенно для прогнозистов, - это уловить динамику условного среднего
(т.к. безусловное среднее постоянно, это один из признаков стационарности
ряда), а условное среднее изменяется в ответ на эволюцию исходного
информационного пространства.
Рациональные распределенные Лаги
Модели
с
бесконечным
количеством
распределенных
лагов
не
используются непосредственно, потому что содержат бесконечное количество
параметров, что препятствует практическому применению. Но они могут быть
преобразованы в конечные. Бесконечный полином B(L) может, например, быть
частным от деления конечных полиномов (и, возможно, очень малого порядка).
Такие полиномы называются рациональными полиномами, а распределенные
лаги,
полученные
из
этих
полиномов,
называются
рациональными
распределенными лагами.
Предположим, например, что
B ( L)
( L)
, где степень полинома
Ф( L)
q
( L) i Li
i 0
в числителе определяется как q, а в знаменателе -
p
Ф( L) i Li
i 0
полином степени р. Таким образом, у полинома B(L) не
бесконечное количество параметров, а только p+q (число параметров и ).
Более реалистичным является случай, когда B(L) не точно, а
приближенно рациональный полином
139
B( L)
( L)
.
Ф( L )
Тогда мы можем аппроксимировать представление Уолда, используя
рациональный распределенный лаг. Рациональные распределенные лаги
представляют модели циклов, которые экономичны относительно параметров, в
то же время являются точным приближением к представлению Уолда.
Оценка
и
вывод
среднего,
автокорреляционной
и
частной
автокорреляционной функций
Предположим, что у нас есть выборка данных временного ряда, и мы не
знаем вида модели, которая генерирует эти данные, т.е. среднее, АКФ, или
ЧАКФ, связанные с истинной моделью. Вместо этого, мы хотим использовать
данные, чтобы оценить среднее, АКФ и ЧАКФ, которые мы можем потом
использовать, чтобы помочь нам изучить лежащую в основе динамику, а потом
решить, какая модель или набор моделей нам подходят.
Оценка выборочного среднего
Среднее стационарного ряда определяется как = Мyt. Основной принцип
оценивания, который называется принципом аналогии, предполагает, что мы
улучшаем
формулу
оценки
(оценочную
функцию)
путем
замещения
математического ожидания выборочными средними. Так что наша оценка
среднего совокупности, представленной как выборка размерностью Т,
называется выборочным средним
1 T
y yt .
T t 1
Обычно нас прямо не интересует оценка среднего, но она нужна для
оценки автокорреляционной функции.
Оценка выборочной автокорреляции
140
Значение автокорреляции при сдвиге уровней ряда на величину для
стационарных рядов уt равно
( )
M ( y t )( y t )
M [( y t ) 2 ]
.
Применяя принцип аналогии, получим в результате оценочную формулу
T
1 T
[( yt y )( yt y )]
[( yt y )( yt y )] t
T t 1
1
ˆ ( )
.
T
1 T
2
2
( yt y )
( yt y )
T t 1
t 1
Эта формула, которая выглядит как функция от , называется выборочной
автокорреляционной
функцией,
а
ее
графическое
представление
коррелограммой. Заметим, что некоторые суммы начинаются с t= + 1, а не с
t= 1; это необходимо из-за наличия в формуле yt-. Обратим внимание на то, что
производится деление одних и тех же суммы на Т, хотя в сумме только (Т- )
членов, т.е. происходит некоторое искажение числа степеней свободы. Деление
на Т или на (Т- ) дает почти одинаковый результат в виду более чем
существенной разницей между Т и , поэтому для практических целей это не
имеет большого значения; кроме того, есть хорошие математические причины
для предпочтения деления на Т.
Часто требуется оценить, является ли исследуемый ряд возможной
аппроксимацией к белому шуму, тогда можно сказать, равны ли нулю
автокорреляции в совокупности. Лучшим результатом будет ряд белого шума.
Тогда распределение выборочных автокорреляций в больших выборках будет
1
.
T
ˆ ( ) N 0,
Выборочные
автокорреляции
ряда,
содержащего
белый
шум,
распределены приблизительно нормально, а нормальное распределение всегда
“удобное” распределение. Среднее значение равно 0, и это говорит о том, что
выборочные
автокорреляции
являются
несмещенными
оценками
автокорреляции генеральной совокупности, которая на самом деле равна 0.
141
Дисперсия выборочных автокорреляций приблизительно равна
отклонение
1
(стандартное
T
1
). Выясним, является ли ряд белым шумом, то есть, равны ли
T
все автокорреляции 0 одновременно. Простое расширение позволяет нам
проверить эту гипотезу.
Перепишем выражение
ˆ ( ) N 0, 1
T
как
T ˆ ( ) ~ N (0,1) . Возведя в
2
квадрат обе части, получим Tˆ ( ) ~ 1 .
2
2.3.5.2. Моделирование циклов: модели СС, АР и АРСС
При
построении
моделей,
применяемых
для
прогнозирования,
исследователи не могут стопроцентно рассчитывать на то, что модель будет
абсолютно
точной.
Обычно
достаточно,
чтобы
объект
прогнозного
исследования моделировался комплексно и с приемлемыми информационными
характеристиками. В частности, уже было показано, что ключ к удачному
моделированию временных рядов и прогнозированию – это постепенное,
точное приближение к представлению Уолда. В практике эконометрического
моделирования и прогнозирования временных рядов обычно рассматривают
три
таких
приближения:
модели
скользящего
среднего
(СС),
авторегрессионные модели (АР) и авторегрессионные модели со скользящими
средними в остатках (АРСС).
Эти три вида моделей, несмотря на то, что являются аппроксимациями к
одному и тому же представлению Уолда, имеют различия в своей специфике,
хотя иногда две разного вида модели являются одинаково хорошими
приближениями к виду Уолда. Однако данные модели различаются по своим
возможностям фиксировать поведение автокорреляционной функции.
Определим характеристики АКФ и величин, характерных для каждой
модели, учитывая, что модель значима. Проделаем это отдельно для АР, СС и
АРСС моделей. Это важно для развития начального понимания свойств
142
моделей,
что
необходимо
для
обоснованного
моделирования
и
прогнозирования.
Для выбора лучшего вида модели прогноза циклических составляющих
временных рядов рекомендуется использовать выборочную автокорреляцию и
частную автокорреляцию вместе с информационным критерием Акаи (AIC) и
критерием Шварца (SIC), а также последующей оценкой прогностической
пригодности модели с помощью критерия Тейла [74, 80,83].
Модель скользящего среднего
Процесс скользящего среднего конечного порядка – это естественное и
очевидное приближение к представлению Уолда, которое является, по сути,
СС-процессом бесконечного порядка.
Понятие СС(1)-модели
Модель скользящего среднего первого порядка, или СС(1)-модель,
выглядит следующим образом
yt = t + t-1 = (1+L) t , где t WN (0, 2).
Определяющей характеристикой процесса скользящей средней в общем
случае и СС(1) в частности, является то, что текущее значение наблюдения ряда
можно выразить как функцию от настоящего и прошлых значений случайной
составляющей
ряда.
Таким
образом,
данная
модель
является
авторегрессионной, но не на значениях ряда, а на текущих и лаговых
возмущениях в правой части уравнения.
Безусловное математическое ожидание процесса
определить следующим образом
Мyt = М(t) + М(t-1) = 0,
а безусловную дисперсию СС-процесса
D(yt) = D(t)+ 2D(t-1) = 2+ 22 = 2(1 + 2).
СС(1) можно
143
Обратите внимание, что при фиксированном значении , возрастание
модуля значения параметра приводит к увеличению безусловной дисперсии.
Условные математическое ожидание и дисперсия процесса СС(1), где
выполняется следующее условие t-1 = {t-1, t-2,… }, будут следующими
М(yt |t-1) = М((t + t-1)|t-1) = М(t |t-1) + М(t-1|t-1) = t-1
и
D(yt |t-1) = М[(yt + М(yt |t-1))2|t-1] = М(t 2|t-1) = М(t 2) = 2.
Таким образом, условное математическое ожидание явно адаптируется к
исходному информационному множеству, в отличие от безусловного
математического ожидания, которое является константой. Заметьте, тем не
менее, что только первый лаг случайной составляющей определяет условное
математическое ожидание, более ранние значения случайной составляющей не
оказывают влияние на настоящее условное математическое ожидание. Это
указывает на “однопериодную память” процесса СС(1), который мы
охарактеризуем через понятие АКФ.
Чтобы рассчитать АКФ для СС(1), необходимо вычислить
автоковариационную функцию. Таким образом,
( ) M ( y t y t ) M (( t t 1 )( t
2 , 1
t 1 ))
.
0, 1
(Доказательство опускается из-за своей сложности). АКФ определяется как
частное от деления автоковариационной функции на дисперсию, т.е.
, 1
( )
( )
1 2
.
( 0)
0, 1
Следует обратить внимание на то, автокорреляционная функция имеет
резкий
обрыв,
т.е.
это
ступенчатая
функция.
Все
коэффициенты
автокорреляции равны 0, кроме первого, зависящего от сдвига = 1, т.е. от
порядка модели СС.
144
Заметьте, что условия стационарности (постоянство безусловного
математического
ожидания,
постоянство
и
конечность
безусловной
дисперсии и зависимость АКФ только от сдвига) выполняются для любого
процесса СС(1) и независимы от значения параметра. Вместе с тем, если
|| < 1, тогда можно говорить об обратимости процесса СС(1). В этом случае
мы можем обратить процесс СС(1) и выразить значения ряда настоящего
периода не через настоящее и прошлые значения случайной составляющей,
а через текущее значение случайной составляющей и лаговые значения ряда.
Это так называемое авторегрессионное представление динамического ряда.
Авторегрессионное представление отличается от представления в виде
процесса скользящей средней тем, что в правой части уравнения стоят
текущее значение случайной составляющей и лаговые значения наблюдений
ряда, в то время как в СС представлении в правой части уравнения стоят
значения случайной составляющей настоящего и прошедших периодов.
Определим авторегрессионное представление как
yt = t + t-1 , где t WN (0, 2).
Отсюда текущее значение случайной составляющей
t = yt – t-1.
Выразим последовательно все предыдущие значения случайной
составляющей через прошлые значения наблюдений ряда. Это запишется
следующим образом:
t-1 = yt-1 – t-2,
t-2 = yt-2 – t-3,
t-3 = yt-3 – t-4
и так далее. Используя эти выражения и делая соответствующие
подстановки в уравнение СС(1)-модели, окончательно можно записать
следующее
145
yt = t + yt-1 – 2yt-2 + 3yt-3 –….
Используя оператор сдвига, модель авторегрессии бесконечного
порядка можно записать в виде
1
yt t .
1 L
Заметим, что обратная подстановка используется для получения
авторегрессионного представления и имеет смысл. Это является условием
сходимости авторегрессионного представления – только если || < 1, потому
что при обратной подстановке мы получаем более высокий порядок модели.
Мы также можем сформулировать условие обратимости по-другому:
обратные величины модуля корней полинома от оператора сдвига ССпроцесса (1+ L) должны быть меньше единицы. Вспомните, что полином
степени m имеет m корней. Поэтому полином СС(1)-процесса имеет один
корень, который является решением уравнения
1 + L = 0.
Этот корень L= -l/, так что его обратная величина будет по модулю
меньше единицы. Т.е. || < 1, так что условия обратимости эквивалентны.
Путь “инверсных корней” для определения условий обратимости кажется
утомительным, но он оказывается более применимым, чем условие || < 1,
как мы увидим далее.
Авторегрессионное представление является более привлекательным
для прогнозистов, потому что так или иначе, если модель применяется для
прогнозирования событий в реальной жизни, она должна связывать
настоящие наблюдения с прошлыми наблюдениями, так чтобы мы могли
экстраполировать значения будущих периодов, опираясь на текущие и
прошлые данные. Если судить поверхностно, СС-модели, кажется, не
соответствуют этому требованию, потому что настоящее значение ряда
выражено через текущее и прошлые значения случайной составляющей. Но
146
с точки зрения условий обратимости, которые мы описали, СС-процессам
соответствуют эквивалентные авторегрессионные представления.
Рассмотрим
поведение
ЧАКФ
для
процесса
СС(1).
Из
авторегрессионного представления бесконечного порядка процесса СС(1),
мы видели, что ЧАКФ постепенно убывает до нуля. Как уже было показано
прежде, значения ЧАКФ – это коэффициенты при последней включенной
лаговой переменной в порядке последовательной аппроксимации к
авторегрессионному представлению более высокого порядка. Если > 0,
тогда пример убывающей ЧАКФ будет одним из видов затухающих
колебаний; иначе говоря, затухание будет односторонним.
Для
каждого
процесса
||
<
1,
так
что
авторегрессионное
представление существует, и > 0, так что коэффициенты авторегрессии
разные по знаку. Конкретно, мы показали, что в общем случае
авторегрессионное представление выглядит
yt = t + yt-1 – 2yt-2 + 3yt-3 –…,
например, в случае, когда = 0,4
yt = t + 0.4yt-1 – 0.16yt-2 + …
Если же = 0,95, то авторегрессионное представление будет иметь вид
yt = t + 0.95yt-1 – 0.9025yt-2 + …
ЧАКФ отражает подобные угасающие колебания. Заметим, что
затухание колебаний медленнее в случае, когда = 0,95.
Понятие СС(q)-процесса
Теперь рассмотрим общий случай процесса скользящей средней
конечного порядка q, что будем в дальнейшем обозначать, как СС(q).
Формально вид данной модели можно представить следующим образом
yt = t + 1t-1 +…+ qt-q = (L) t , где
147
t WN (0, 2), а (L) = 1 + 1L + … + qLq - - полином от оператора сдвига
q-й степени.
Процесс СС(1) – это частный случай СС(q), когда q = 1. С добавлением
лагов случайной составляющей в правую часть базового уравнения, СС(q)процесс сглаживания может быть описан более динамичными моделями,
которые потенциально могут быть применены для прогноза.
Свойства процесса СС(q) аналогичны свойствам процесса CC(1). Это не
трудно проверить самостоятельно. Однако обратим внимание на ряд ключевых
моментов, которые имеют практическое значение.
Так же как процесс СС(1) является стационарным в широком смысле при
любых значениях параметров, так себя ведет и СС(q)-процесс. Подобно СС(1),
СС(q) обратим только тогда, когда выполняется корневое условие. Полином от
оператора сдвига процесса СС(q) имеет q корней; когда q > 1, вероятность
появления комплексных корней возрастает. Условие обратимости процесса
СС(q) заключается в том, что обратные величины всех корней полинома от
оператора сдвига должны находится внутри единичной окружности, в этом
случае мы имеем дело со сходящимся авторегрессионным представлением вида
1
yt t .
( L )
Условное математическое ожидание процесса СС(q) изменяется в
зависимости от объема исходного информационного множества, в отличие от
безусловных моментов, которые фиксированы. По сравнению со случаем
СС(1), когда условное математическое ожидание зависит от первого лага
случайной составляющей, условное математическое ожидание процесса СС(q)
зависит от всех q лагов стохастической компоненты. Так что СС(q)-процесс
имеет потенциально более “долгую память”.
Потенциально “долгая память” процесса четко прослеживается в
поведении АКФ. В случае СС(1), все значения АКФ, кроме зависящего от
единичного сдвига, равны 0. В случае СС(q) все значения АКФ при сдвигах
148
больших q равны 0. Обрыв АКФ – это отличительная характеристика процессов
СС. ЧАКФ процесса СС(q), наоборот, убывает постепенно, как и в случае
авторегрессионного представления; в обоих случаях убывание происходит в
виде синусоиды или экспоненты, в зависимости от значения параметров.
СС(q)-процессы потенциально могут давать лучшие приближение
представления Уолда, но недостаток их в том, что придется оценивать довольно
много параметров. Представление Уолда включает скользящую среднюю
бесконечного порядка. Процесс СС(q) аппроксимирует скользящую среднюю
бесконечного порядка к скользящей средней конечного порядка
yt = (L)t ,
так СС(1) аппроксимирует процесс СС бесконечного порядка к СС первого
порядка, который может иногда быть очень ограниченным.
Авторегрессионные модели (АР)
Авторегрессионый процесс также является естественной аппроксимацией
представления Уолда. Как уже было показано, при выполнении определённых
условий, процесс СС можно представить в виде авторегрессии, таким образом,
авторегрессионный процесс в некотором смысле подобен процессу скользящей
средней. Так же, как СС-процесс имеет следующее прямое предназначение: это
просто стохастическое разностное уравнение, простая математическая модель,
в которой значение показателя выражается в виде линейной комбинации
конечного числа предшествующих значений этого показателя и аддитивной
случайной составляющей. Стохастические разностные уравнения являются
естественным инструментом для динамического моделирования в дискретном
времени.
Понятие АР(1)-процесса
Модель авторегрессионного процесса первого порядка, или АР(1) имеет
вид
yt = yt-1 + t, где t WN (0, 2).
149
Очевидно, что с помощью оператора сдвига модель можно записать
следующим образом
(1 - L)yt = t .
Определим, когда есть смысл использовать оператор сдвига. Обратите
внимание, что
(1 - L)yt = yt - Lyt = yt - yt-1.
Так что окончательно модель имеет вид (1 - L)yt = t, что эквивалентно записи
yt - yt-1 = t или yt = yt-1 + t , что и требовалось.
Процесс СС конечного порядка всегда стационарен, но есть ещё и
определенные
условия
обратимости,
т.е.
условия
существования
авторегрессионного представления. В случае с авторегрессией ситуация
выглядит с точностью до наоборот. Авторегрессионные процессы всегда
обратимы – в сущности, обратимость не является проблемой, так АР конечного
порядка уже в авторегрессионной форме. Однако должны выполняться
определенные условия, чтобы АР-процесс был стационарным.
Запишем процесс АР(1) yt = yt-1 + t и подставим вместо лаговых
эндогенных переменных лаговые значения стохастической составляющей
yt = t + t-1 + 2t-2 +….
Используя оператор сдвига, можем окончательно записать
yt
1
t
1 L .
Данное представление yt через процесс СС является сходящимся тогда и
только тогда, когда || < 1; так что условие || < 1 является условием
стационарности в случае АР(1)-модели. Аналогично, условие стационарности
можно сформулировать, как требование, соблюдения условия: обратные
величины корней полинома от оператора сдвига должны быть по модулю
меньше единицы.
150
Из представления процесса СС для задания условий стационарности
процесса АР(1) можно рассчитать безусловное математическое ожидание
скользящей:
М(yt) = М(t + t-1 + 2t-2 +…) = М(t) + М(t-1) + 2М(t-2) + … = 0
и ее безусловную дисперсию
2
D(yt) = D(t + t-1 + 2t-2 +…) = 2 + 22 + 42 +… =
.
1 2
i 0
2
2i
Условные моменты можно рассчитываться следующим образом
М(yt | yt-1) = М((yt-1+ t) | yt-1) = М(yt-1 | yt-1) + М(t | yt-1) = yt-1 +0 = yt-1 ,
а так же
D(yt | yt-1) = D((yt-1+ t) | yt-1) = 2D(yt-1 | yt-1) + D(t | yt-1) = 0 + 2 = 2.
Из
приведенных
математическое
соотношений
ожидание
можно
адаптируется
под
заметить,
что
условное
изменяющееся
исходное
информационное множество как процесс эволюции.
Чтобы рассчитать автоковариацию, осуществим следующее. Запишем
уравнение процесса авторегрессии
yt = yt-1 + t .
Умножив обе части этого уравнения на yt-, получим
ytyt- = yt-1 yt- + t yt- .
Для 1, беря математическое ожидание от обеих частей уравнения,
получим () = ( - 1).
Полученное выражение носит название уравнения Юла-Уокера. Это
рекуррентное выражение; и если известно () для любого , уравнение ЮлаУокера дает возможность получить (+1). Зная (0), начальный уровень
автоковариации, мы могли бы использовать уравнение Юла-Уокера для
151
определения всей последовательности ковариаций. Он известен, это дисперсия
процесса, и находится по формуле:
2
(0)
.
1 2
Таким образом, имеем
2
(0)
,
1 2
2
(1)
,
12
2
(2)
12
2
и так далее. Тогда в общем случае имеем
2
( )
, 0,1,2...
1 2
Разделив левую и правую части полученного равенства на (0) дает нам
возможность определить коэффициенты автокорреляции процесса следующим
образом
( ) ,где 0,1,2...
Из полученного аналитического выражения следует, что динамика АКФ
носит постепенно затухающий характер, что типично для АР-процессов.
В пределе, когда величина авторегрессионного сдвига стремится к
бесконечности, АКФ приближается к нулю. В частности, АКФ не обрывается
до нуля, как в случае СС-процесса. Если значение положительно, АКФ
убывает экспоненциально, если отрицательно, то – в виде колебаний. Типичная
ситуация в бизнесе и экономике, когда > 0, но в обоих случаях, АКФ убывает
постепенно, не резко. ЧАКФ для процесса АР(1) имеет вид ступенчатой
функции и обрывается резко; значение ЧАКФ вычисляется по формуле
152
, 1
p( )
.
0, 1
Легко понять, почему частная автокорреляционная функция резко
обрывается. Значения частной автокорреляционной функции вычисляются как
оценки
последних
коэффициентов
в
уравнении
АР
–
процесса
соответствующего порядка. Например, если мы имеем дело с АР(1) процессом,
то ЧАФ(1) – это оценка параметра процесса авторегрессии, и все остальные
значения ЧАФ при сдвигах больших единицы 1, равны нулю.
Понятие АР(р) процесса
В общем случае модель авторегрессии р-го порядка, или коротко
обозначая АР(р) - модель, имеет вид
yt = 1yt-1 + 2yt-2 + … + рyt-р + t , где t WN (0, 2).
Используя оператор сдвига, модель АР(р) процесса можно записать
следующим образом
Ф(L) yt = (1 – 1L - 2L2 - … - pLp ) yt = t.
Так же, как при нашем рассуждении по поводу СС(q) процесса, при
рассмотрении модели АР(р) опустим математические выводы и попробуем по
аналогии с АР(1) процессом интуитивно установить ее ключевые свойства.
АР(р) процесс является стационарным в широком смысле тогда и только
тогда, когда обратные величины всех единичных корней характеристического
полинома от оператора сдвига Ф(L) лежат внутри единичного круга.
Необходимое условие стационарности в широком смысле, которое очень легко
p
использовать в качестве проверки, - это
i 1
i
1 . Если условие выполняется, то
процесс может быть стационарным или нестационарным. Но если это условие
не выполняется, то процесс не может быть стационарным.
В случае слабой стационарности мы можем записать процесс в виде
модели скользящего среднего бесконечного порядка из уравнения
153
yt
1
t .
( L)
Автокорреляционная функция процесса АР(р)так же, как и для АР(1)-
модели,
экспоненциально
убывает
по
мере
удаления
членов
последовательности друг от друга во времени. Частная автокорреляционная
функция процесса АР(р) резко обрывается на сдвиге р по той же причине, что и
ЧАКФ АР(1)-модели при сдвиге 1.
Рассмотрим автокорреляционную функцию процесса АР(р) более
высокого порядка. Несмотря на тот факт, что автокорреляционная функция
произвольного порядка ведет себя так же, как и автокорреляционная функция
процесса АР(1), т.е. постепенно убывает, она, тем не менее, может показать
более богатый набор примеров, зависящих от порядка и параметров процесса.
Она может, например, монотонно убывать, как процесс АР(1) с положительным
коэффициентом, а может представляться в виде затухающих колебаний, что
невозможно в случае процесса АР(1). Колебания АКФ в АР(1)-модели
возможны лишь, когда коэффициент отрицательный и АКФ меняет знак при
последовательных сдвигах. В АР-моделях более высокого порядка, тем не
менее, значения АКФ могут колебаться с большими амплитудами, больше
похожими на циклические колебания в традиционном понимании. Такая
ситуация складывается, когда корни характеристического уравнения полинома
от оператора сдвига комплексные.
Рассмотрим,
например,
процесс
АР(2)
подчиненный
следующей
зависимости
yt = 1,5yt-1 – 0,9yt-2 + t .
Соответствующий полином оператора сдвига имеет вид
1 – 1,5L + 0,9L2
и имеет два комплексных сопряженных корня: 0,83 0,65i. Инверсные корни:
0,750,58i. Оба они хоть и близки к границам, но все же лежат внутри
единичного круга. Таким образом, рассматриваемый процесс является
154
стационарным в широком смысле. Может быть показано, что АКФ АР(2) ведет
себя следующим образом
( 0) 1 ,
(1)
1
,
12
( ) 1 ( 1) 2 ( 2), 2,3,... .
Используя эту формулу, мы можем легко оценить АКФ процесса.
Вернемся назад к более подробному рассмотрению фундаментального
утверждения о том, что авторегрессионный процесс конечного порядка
является аппроксимацией представления Уолда, которое в общем виде может
иметь следующее представление
yt = B(L) t ,
где B(L) полином бесконечного порядка.
АР(1)-процесс,
аппроксимации
как
и
представления
процесс
Уолда.
СС(1),
это
Процесс
по
сути
скользящего
различные
среднего,
связанный с АР(1)-процессом имеет вид
yt
1
t
1 L .
Таким образом, когда мы строим АР(1)-модель, мы используем
1
t
1 L - рациональную дробь с вырожденным числителем (полином степени
0) и знаменателем – многочленом 1-й степени, чтобы аппроксимировать B(L).
Процесс скользящего среднего, связанный с АР(1)-процессом, так же как и
представление Уолда бесконечного порядка, но у такого процесса не
бесконечное количество коэффициентов. На самом деле, только один параметр
Ф составляет основу процесса.
155
АР(р) - очевидное обобщение АР(1) – модели по пути приближения к
представлению Уолда. Процесс скользящего среднего, связанный с АР(р)процессом имеет вид
yt
1
t
( L) .
Когда строиться АР(р)-модель, чтобы аппроксимировать представление
Уолда, мы используем всю ту же рациональную дробь с вырожденным
числителем (полином степени 0), но знаменатель уже представляет собой
многочлен более высокого порядка.
Авторегрессионные модели со скользящим средним в остатках (АРССмодели)
Авторегрессионные и СС-модели часто комбинируют с целью получения
лучших, т.е. более точных приближений к представлению Уолда, конструируя
так называемые авторегрессионные модели со скользящим средним в остатках,
или АРСС(р,q)-модели. Здесь значение p определяет порядок авторегрессии
ряда, а q – порядок скользящего среднего остатков ряда. Как понятно АРССмодели носят более универсальный характер, нежели АР и СС-модели,
полностью сохраняя при этом свойства и возможности последних. Заметим
следующее, во-первых, если случайная составляющая, которая характеризуется
авторегрессионной моделью, может быть записана как процесс скользящего
среднего, то ее поведение может быть описано моделью АРСС. Во-вторых,
АРСС-модели могут расти вследствие применения процедур агрегации.
Например, суммы авторегрессионных процессов или суммы АР и ССпроцессов могут быть представлены как АРСС-процессы. И, наконец, АРпредставление наблюдаемого процесса в измерении ошибки оказываются
подобными АРСС-процессам.
Покажем на примере запись АРСС-процесса. Простейший АРСС-процесс
- АРСС(1,1), который не является чистым АР или СС процессом, можно задать
с помощью формулы
156
yt = yt-1 + t + t-1 , где
t WN (0, 2),
или тоже самое с помощью оператора сдвига вида
(1 - L)yt = (1 + L)t,
где ||<1 – условие стационарности процесса, а || < 1 – условие его
обратимости.
Если
условие
стационарности
выполняется,
мы
имеем
дело
с
представлением СС в виде
yt
(1 L)
t ,
(1 L)
которое является моделью распределенных лагов бесконечного порядка,
включающая
текущее
и
прошлые значения
случайной
составляющей.
Аналогично, если выполняется условие обратимости процесса, тогда мы имеем
дело с авторегрессионным представлением бесконечного порядка вида
(1 L)
yt t .
(1 L)
АРСС(р,q)-процесс - это естественное обобщение случая АРСС(1,1),
которое включает множество СС и АР лагов. В общем случае записывается
процесс следующим образом
yt = 1yt-1 +…+ рyt-р + t + 1t-1 +…+qt-q , где
t WN (0, 2)
или
(L)yt = (L)t
Если инверсии всех корней полинома (L) лежат внутри единичного
круга, тогда процесс является стационарным и может быть представлен в виде
сходящегося процесса СС бесконечного порядка
157
yt
( L )
t .
( L)
Если обратные величины всех корней полинома (L) лежат внутри
единичного круга, тогда процесс является обратимым и может быть
представлен в виде сходящегося процесса АР бесконечного порядка вида
( L)
yt t .
( L)
Как АР и СС-процессы, АРСС-процесс имеет фиксированное безусловное
математическое ожидание, но зависящее от времени условное математическое
ожидание. По сравнению с чистым процессом АР или СС, ни АКФ, ни ЧАКФ
АРСС-процесса не обрывается при каких-либо конкретных сдвигах. Легко
показать, что обе функции убывают постепенно, ЧАКФ подобно процессу СС, а
АКФ – процессу АР.
АРСС-модели аппроксимируют представление Уолда, с помощью
отношения двух полиномов от операторов сдвига конечного порядка, ни один
из которых не является вырожденным. Так что АРСС-модели аппроксимируют
представление Уолда, с помощью отношения конечных полиномов от
операторов сдвига
yt
( L )
t .
( L)
АРСС-модели, включающие оба компонента, т.е. авторегрессию и
скользящее среднее, часто дают достаточно надежные аппроксимации
обобщенного представления Уолда, у которого, однако, всего несколько
параметров. В частном случае, например, модель АР(6) может дать такую же
точную аппроксимацию, какая может быть получена с помощью модели
АРСС(1,2), но в модели АР(6) шесть параметров, которые нужно оценить, а у
АРСС(1,2) – всего лишь три.
158
2.3.5.3. Прогнозирование циклических составляющих
временных рядов
Общие основания построения прогнозов циклических процессов в рядах
динамики
Определим
исходную
информационную
выборку,
имеющуюся
в
распоряжении исследователя за ретроспективный период длительности Т, как
Т. Исходя из существа повседневной социально-экономической практики,
естественно воспринимать массив исходных данных как выборку, содержащую
имеющиеся в наличии прошлые значения ряда динамики исследуемого
показателя yt, т.е.
Т = {… уt yt-1, yt-2,… },
где в теоретических целях мы представляем, что ряд имеет начало в
бесконечном прошлом.
Как уже ранее было рассмотрено, верным является и утверждение о том,
что если уt является стационарным рядом, то исходный ряд Т можно
представить в виде прошлых и настоящих значений его возмущений, т.е.
Т = {… t, t-1, t-2,… }.
Предположим, например, что процесс, для которого мы собрались
строить прогноз, стационарный процесс вида АР(1), т.е.
yt = yt-1 + t.
Тогда
Т = уТ - yТ-1 ,
Т-1 = уТ-1 - yТ-2,
Т-2 = уТ-2 - yТ-3
и так далее. Другими словами, мы можем вычислить настоящие и прошлые
значения случайной составляющей, зная настоящие и прошлые значения
159
исследуемой выборки. Таким образом, даже если исследуемый ряд наилучшим
образом с точки зрения выбранных оценочных критериев качества описывается
моделями СС или АРСС, если ряд представлен в обратимом виде, то мы можем
записать его как АР модель исходного ряда. То есть, возможно выразить через
у.
Таким образом, верно утверждение о том, что исходная информационная
выборка без потери своих информационных свойств может быть эквивалентно
представлена
выборкой,
содержащей
настоящие
и
прошлые
значения
компонент и у, т.е. Т = { …уt,… … …,t,… } или привязываясь к текущему
значению временного ряда
Т = {уТ, yТ-1, yТ-2,…,Т, Т-1, Т-2,… }.
Предположим, что основываясь на такой выборке, мы хотим найти
оптимальный прогноз значения ряда уt на период Т+l. Оптимальный прогноз –
это прогноз с наименьшими потерями в среднем, то есть, который
минимизирует ожидаемые потери. В широком смысле оптимальный прогноз –
это условное среднее, E (yТ+l | T), т.е. ожидаемая оценка будущего значения
ряда, которое прогнозируется, основываясь на имеющейся информации. Т.е.
предполагается существование влияния предшествующих членов ряда на
значения их последующих уровней.
В общем, условное среднее не обязательно должно быть линейной
функцией от элементов, содержащихся в информационной выборке. Из-за того,
что линейные функции легко поддаются обработке, мы предпочитаем работать
с линейными прогнозами, т.е. с прогнозами, являющимися линейной функцией
от элементов информационной выборки, путем поиска лучшей линейной
аппроксимации к условному среднему, называется линейным отображением
(проекцией) и записывается Р (yТ+l | T). Это объясняет общее понятие “прогноз
с взвешенными наименьшими квадратами ошибки”. Линейное отображение
очень часто бывает пригодным и точным, потому что условное среднее часто
близко к линейному. В случае гауссовского распределения случайной
160
составляющей временного ряда условное математическое ожидание всегда
линейное, поэтому верно утверждение M(yТ+l | T) = Р(yТ+l | T).
Прогнозирование процессов скользящего среднего
Построение точечного прогноза для процесса скользящего среднего конечного
порядка
Метод получения точечного прогноза всегда механистичен. Исходный
ряд проецируется в будущее в виде соответствующих значений, без каких бы то
ни было изменений в выявленной динамике, на интересующий нас период T + l.
Приведем пример. Пусть в ходе исследования ряда динамики выявлен процесс
типа СС(2), его можно записать следующим образом
yt = t + 1t-1 + 2t-2, где t WN (0, 2)
(2.3.11).
Предположим, что мы находимся в момент времени Т и хотим
спрогнозировать значение уТ+1. Сначала преобразуем базовую формулу (3.10)
для момента времени Т+1
yТ+1 = Т+1 + 1Т + 2Т-1.
(2.3.12).
Отобразим полученную форму на исходную информационную выборку
T, имея в виду, что информация о будущем ряда нам не доступна, т.е. все
будущие значения инноваций ряда заменяются нулями. Таким образом, верно
следующее утверждение
yТ+1,Т = Р(yТ+1| T) = 1Т + 2Т-1
(2.3.13).
Тогда, для того чтобы сделать прогноз на два шага вперед, запишем
yТ+2 = Т+2 + 1Т+1 + 2Т
(2.3.14),
и делая проекцию на исходные данные, получим
yТ+2,Т = Р(yТ+2| T) = 2Т
(2.3.15).
Очевидно, продолжая в этом направлении, мы уже со следующей
итерации убеждаемся в том, что yТ+l,T = 0 для всех l > 2.
Теперь рассчитаем соответствующие ошибки прогноза. Исходя из
определения, ошибка прогноза – это разница между спрогнозированным
161
значением показателя и его действительным значением. Это можно записать
так еТ+l,Т = yT+l – yT+l,T.
С учетом последнего утверждения и принимая в рассмотрение выражения
(3.12) - (3.15), обобщая, можем записать следующее
еТ+1,Т = Т+1
(модель типа «белый шум»),
еТ+2,Т = Т+2 + 1Т+1
(модель типа СС(1)),
…..
еТ+l,Т = Т+l + 1Т+l-1 + 2Т+l-2
(модель типа СС(2) для всех l > 2).
Как не трудно убедиться, в этом случае дисперсии ошибок прогноза
определяются соответственно следующим образом
12 = 2,
22 = 2(1 + 12),
….
l2 = 2(1 + 12 + 22) для всех l>2.
Кроме того, дисперсия ошибки прогноза для l>2 это просто безусловная
дисперсия yt.
Попытаемся обобщить наши рассуждения относительно возможностей
построения прогноза в представлении СС(q)-процессов. Модель выглядит
следующим образом
yt = t + 1t-1 +…+ qt-q
Если lq, прогноз будет иметь вид
yТ+l,Т = 0 + “поправка”
Если l>q, прогноз будет выглядеть как
yТ+l,Т = 0
Таким образом, процесс СС(q) не прогнозируется (не говоря уже об
условном среднем) больше, чем на q шагов вперед. Вся динамика процесса
СС(q), которую используют для прогнозирования, гасится к тому времени,
когда мы близки к порядку величины q модели скользящего среднего.
162
Рассмотрим, как в обобщенном случае ведут себя соответствующие
ошибки прогноза. Они представляют собой СС(l-1)- в случае, если l q, и СС(q)
– процесс, если l > q.
Ошибка прогноза на период упреждения l в случае, когда l > q – это
значение ряда минус его среднее значение.
Наконец, рассмотрим закономерности в дисперсиях ошибок прогноза.
При l q дисперсия l2 D (yt), в то время, как для l > q она выражается
через соотношение l2 = D (yt).
Рассмотренные типы моделей, оказывается, являются достаточно общими
в прогностических исследованиях.
Построение
точечный
прогноз
для
процесса
скользящего
среднего
бесконечного порядка
Рассмотрим общий случай процессов СС бесконечного порядка. Любой
стационарный процесс может быть записан как процесс СС бесконечного
порядка. Данные процессы легче понимаются и управляются, потому что они
записываются в виде возмущений белого шума, имеющего очень простые
статистические свойства.
Имея в виду, что общий линейный процесс выглядит как
yt = B(L)t =
b
i 0
i t i
,
где t WN (0, ), b0 = 1, и как ранее было показано
2
2
b
i 0
i
2
. С учетом
этого определим динамику СС процесса на будущий период l
yT+l= T+l+ b1T+l1 +…+ blT + bl+1T-1+…
Затем мы проецируем yT+l на исходную информационную выборку. Такое
отображение приводит к тому, что все будущие значения равны нулю (в силу
того, что они подчинены распределению типа «белый шум», а потому
непрогнозируемы), следовательно, остается
yT+l= blT + bl+1T-1+…
163
Это приводит к тому, что ошибка прогноза на l шагов вперед серийно
коррелируется, а последнее замечание позволяет перейти к процессу СС(l-1)
вида
l 1
еТ+l,T = (yT+l – yT+l,T) = bi t l i
i 0
с нулевым средним и дисперсией
l 1
l2 = 2 b i
2
i 0
(2.3.16).
Сделаем несколько замечаний, относящихся к оптимальному прогнозу
общего линейного процесса и соответственных ошибок прогноза, а также
дисперсий этих ошибок.
Во-первых, ошибка прогноза на один период вперед – случайная
составляющая ряда t. При этом t является несистематической составляющей
ряда, она является той частью yt+1, которая не может быть линейно
спрогнозирована и именуется в данном изложении инновацией.
Во-вторых, ошибка прогноза получается серийно коррелированной, как
использована в случае, когда l > 1. Серийная коррелированность не может быть
для улучшения процесса прогнозирования, потому что автокорреляционная
функция процесса СС(l-1) обрывается как раз перед началом периода нашей
информационной выборки. Это общее и предельно важное свойство ошибок,
связанных с оптимальным прогнозом: ошибки оптимального прогноза не могут
быть предсказаны на основе имеющейся информации, когда прогноз был уже
сделан. Если возможно спрогнозировать ошибки прогноза, тогда возможно
улучшить прогноз, что означает, что данный прогноз не был оптимальным. И
наконец, заметим, когда l стремится к бесконечности, yТ+l,Т стремится к нулю,
l 1
т.е. к безусловному среднему процесса, а l2 стремится к 2 bi , т.е. к
2
i 0
безусловной дисперсии. Это отражает тот факт, что когда l стремится к
бесконечности, полезность условной информации, на которой базируется
прогноз, прогрессивно убывает. Другими словами, далекое будущее труднее
прогнозировать, чем ближайшее будущее.
164
Интервальный прогноз и плотность прогноза
Оценим способ построения интервала и плотности прогноза. Независимо,
является ли скользящее среднее конечной или бесконечной величиной, мы
будем использовать в своих рассуждениях ранее полученные результаты.
Ошибка прогноза на l шагов вперед определяется как
еТ+l,T = yT+l – yT+l,T.
Ожидаемое значение динамического ряда через l шагов, т.е. yT+l, можно
представить как
yT+l = yT+l,T + еТ+l,T.
Если инновации распределены нормально, тогда значение наблюдаемого
ряда будущего периода тоже распределено нормально и обусловлено нашей
информационной выборкой в момент, когда был сделан прогноз. Таким
образом, мы можем построить с (100-)%-й вероятностью интервальный
прогноз на l шагов вперед вида yT+l,T t/2l, где t/2 – t-статистика Стьюдента
заданного уровня значимости и с учетом соотношения (2.3.16).
По этой же схеме мы строим плотность прогноза N(yT+l,T, 2l). Среднее
условного распределения yT+l равно yT+l,T, ,которое в этом случае должно быть,
потому что мы строили точечный прогноз как условное среднее. Дисперсия
условного распределения прогнозных значений равна 2l, т.е. дисперсии
ошибки прогноза.
Проиллюстрируем интервальное представление прогноза и плотность его
распределения на примере модели СС(2)-процесса динамического ряда, пусть
модель ряда имеет вид
yt = t + 1t-1 + 2t-2 с t WN (0, 2).
Предполагая нормальность в распределении остатков динамического
ряда с (100-)%-й вероятностью интервальный прогноз на один период вперед
165
будет иметь вид yT+1,T = (1Т + 2Т-1) t/2l, а плотность прогноза будет N(1Т
+ 2Т-1, l2).
Построение конкретных прогнозных значений
До сих пор мы предполагали, что параметры процесса, для которого мы
строили прогноз, известны. На практике, конечно, они должны быть оценены.
Чтобы построить конкретное значение прогноза, мы просто заменяем
неизвестные оценки параметров в наших формулах на оценки, а инновации – на
остатки.
Рассмотрим, например, процесс СС(2)
yt = t + 1t-1 + 2t-2.
Как можно проверить, используя методы, с которые приводились ранее,
оптимальный прогноз на 2 периода вперед при предположении, что параметры
известны, будет иметь вид
yT+2,T = 2Т
с соответствующей ошибкой прогноза
еТ+2,T = Т+2 + 1Т+1,
а, следовательно, дисперсией ошибки прогноза
22 = 2(1 + 12).
Чтобы сделать конкретный прогноз, мы заменяем неизвестные параметры
оценками, а инновации заменяем остатками, получаем
yˆ T 2,T ˆ 2 ˆT
и дисперсию ошибки прогноза
ˆ 2 2 ˆ 2 (1 ˆ1 2 ) .
166
Затем, мы можем построить конкретный интервальный прогноз и
плотность
прогноза,
N ( yˆ T 2,T , ˆ 2 )
которые
соответственно
равны
yˆT 2,T t / 2ˆ 2
и
2
Стратегия
.
выбора
формулы
прогноза,
выведенной
исходя
из
предположения о том, что нам известны параметры, и замены неизвестных
параметров оценками – это естественный путь конкретизации построения
точечных прогнозов. Тем не менее, использование подобной стратегии
построения плотности конкретного прогноза имеет некоторую тонкость,
которая заслуживает дополнительного обсуждения.
На примере вспомните ещё раз, что фактическое будущее значение ряда
есть
yT+2 = Т+2 + 1Т+1 + 2Т,
тогда конкретный точечный прогноз примет вид
yˆ T 2,T ˆ 2 ˆT .
Таким образом, ошибка прогноза может быть оценена, как
eˆT 2,T yT 2 yˆ T 2,T T 2 1 T 1 ( 2 ˆ2 ) T ,
дисперсию которой очень трудно рассчитать. В такой ситуации можно
попытаться
сделать
подходящее
приближение:
можно
пренебречь
неопределенностью оценок параметров и допустить, что оценки параметров
равны настоящим значениям параметров. Следовательно, полагая, что
2 ˆ2 0 , получим
eˆT 2,T T 2 1 T 1
с дисперсией
22 = 2 (1 + 12),
оценить которую возможно следующим образом
2
2
sˆ2 sˆ 2 (1 ˆ1 ) .
167
Цепное правило прогнозирования
Точечные прогнозы авторегрессионных процессов
Поскольку любой стационарный процесс АР(р) может быть записан в
виде процесса СС бесконечного порядка, нет необходимости в какой-нибудь
специальной технике для прогнозирования авторегрессионных процессов.
Вместо этого, мы можем просто преобразовать процесс авторегрессии в
процесс скользящего среднего, а затем применять технику, которая разработана
для СС процессов. Оказывается, однако, что простой рекурсивный метод для
расчета оптимального прогноза применим в случае авторегрессии.
Рекурсивный метод, называемый цепным правилом прогнозирования,
лучше изучать на примере. Рассмотрим процесс АР(1), т.е.
yt = yt-1 + t , где
t WN (0, 2)
Сначала мы строим оптимальный прогноз на 1 шаг вперед, затем мы
строим оптимальный прогноз на 2 шага вперед, который зависит от
оптимального прогноза на 1 период, который мы уже строили. Далее мы
строим прогноз на 3 периода вперед, который, в свою очередь, зависит от уже
вычисленного прогноза на 2 периода и т.д.
Чтобы построить прогноз на 1 период, запишем процесс АР(1) на период
Т+1
yТ+1 = yТ + Т+1.
Затем, проецируя правую часть уравнения на информационную выборку
размером Т, мы получим
yТ+1,Т = yТ.
Теперь построим прогноз на 2 периода вперед. Запишем процесс в период
Т+2
yТ+2 = yТ+1 + Т+2.
168
Проекция на исходный ряд размерности N позволяет получить
yТ+2,Т = yТ+1,Т.
Обратите внимание на то, что инновация будущего периода заменена
нулем, и что прямо осуществляется замена значения уt в момент времени Т+1
его предшествующим оптимальным прогнозным значением. Построим теперь
прогноз на 3 шага вперед. Запишем наш процесс в момент времени Т+3
yТ+3 = yТ+2 + Т+3.
Затем опять проецируем на Т-размерную информационную выборку
yТ+3,Т = yТ+2,Т,
где требуемое значение прогноза на 2 периода уже получено.
Продолжая процесс далее, мы можем рекурсивно построить прогнозы на
любые
будущие
периоды.
Отсюда
и
название
–
цепное
правило
прогнозирования. Заметьте, что в случае процесса АР(1) для построения
прогноза требуется только совсем недавнее значение уt, а для общего процесса
АР(р), требуются только р последних недавних значений уt.
Точечные прогнозы для процессов АРСС
Теперь рассмотрим прогнозирование стационарных процессов АРСС. Как
и в случае авторегрессионных процессов, мы всегда можем представить АРСС
процесс
в
виде
СС
бесконечного
порядка,
а
потом
использовать
вышеуказанные методы для прогнозирования процессов СС. Но так же, как и в
случае с АР-моделями, существует простой метод для прогнозирования
процессов АРСС напрямую, комбинированием уже изученных подходов к
моделированию СС и АР-процессов.
Как и прежде, мы переписываем процесс АРСС в интересующий нас
момент будущего
yT+l = 1yT+l-1 +…+ p yT+l-p + T+l + 1 T+l-1 +…+ q T+l-q .
169
В правой части уравнения у нас различные будущие значения уt и t.
Заменяем всю правую часть равенства на ее проекцию в Т-размерную
информационную выборку. То есть, заменяем все будущие значения уt
прогнозными
значениями,
полученными
рекурсивно
согласно
цепному
правилу, а все будущие значения t заменяем на 0, получим
yT+l,Т = 1yT+l-1,Т +…+ p yT+l-p,Т + T+l,Т + 1 T+l-1,Т +…+ q T+l-q,Т.
При использовании этой формулы, следует обратить внимание, что
оптимальный “прогноз” времени Т любого значения уt или t в момент времени
Т или раньше – это просто сами значения уt или .
В качестве примера, рассмотрим прогнозирование процесса АРСС(1,1). Его
можно записать следующим образом
yt = yt-1 + t + t-1 с t WN (0, 2).
Найдем yT+1,Т. Процесс в момент времени Т+1 имеет вид
yТ+1 = yТ + Т+1 + Т.
Проецируя правую часть уравнения на Т, получим
yТ+1,Т = yТ + Т
Найдем теперь yT+2,Т. Процесс в момент времени Т+2 имеет вид
yТ+2 = yТ+1 + Т+2 + Т+1
Проецируя правую часть уравнения на Т, получим
yТ+2,Т = yТ+1,Т
Подставляя полученное ранее прогнозное значение на 1 период вперед,
получим
yТ+2,Т = (yТ + Т) = 2 yТ + Т.
Если продолжить подстановку, то совершенно ясно, что
yТ+l,Т = yТ+l-1,T
для всех l > 1.
170
Интервальные прогнозы и плотность прогноза
Цепное правило, независимо, от того применяется ли оно для чистых АР моделей или для АРСС - моделей, является хорошим способом упростить
расчет точечных прогнозов. Для построения интервального прогноза и
плотности прогноза необходима дисперсия ошибки прогноза на l периодов,
которую мы можем взять из СС-представления, как это обсуждалось ранее. Она
будет иметь вид
l 1
l = bi .
i 0
2
2
2
Заметим, что мы в действительности не оцениваем представление СС;
скорее мы решаем обратную задачу для стольких параметров b, сколько нам
нужно в виде реальных параметров модели, которые мы заменяем на оценки.
Проиллюстрируем
построение
(100-)%-го
доверительного
интервального прогноза на 2 периода вперед для АРСС(1,1)-процесса. Мы уже
построили точечный прогноз yT+2,Т; нам осталось только рассчитать дисперсию
ошибки этого прогноза. Процесс представлен уравнением
yt = yt-1 + t + t-1.
Делая
подстановку
значения
yt-1
и
проводя
соответствующие
преобразования, получаем
yt = (yt-2 + t-1 + t-2) + t + t-1 = t + (+)t-1 +…
Нет необходимости делать обратную подстановку далее, потому что
дисперсия ошибки прогноза здесь 22 = 2(1 + b12), где b1 – коэффициент при t-1
в представлении процесса АРСС(1,1) в виде СС-процесса, и рассчитывается как
(+). Таким образом, интервальный прогноз на 2 периода вперед будет
следующим yТ+2,Т t/22, или
2
(2yТ + Т) t/2 1 ( )
171
Оцененное значение интервального прогноза окончательно примет
2
ˆ
ˆ 2
следующий вид (ˆ y T ˆ T ) t s 1 (ˆ ) .
2
2.4. Прогнозирование на основе факторных
регрессионных моделей
Одним из альтернативных способов обоснования и построения прогноза
развития сложного социально-экономического объекта является использование
факторных регрессионных моделей или другими словами - линейных моделей
множественной регрессии (ЛММР). Их содержательная особенность состоит в
том, что в отличие от, например, моделей временных рядов нам, возможно,
удастся с их помощью не только уловить особенности процесса изменения
динамического ряда, но также некоторым образом выявить его причинность.
Последнее обстоятельство чрезвычайно важно как с точки зрения повышения
качества прогноза, по крайней мере, его информативности, так обоснования и
выработки альтернативных стратегий и траекторий будущего развития объекта
исследования, т.е. разработки активного прогноза.
Необходимым условием возможности построения регрессионной модели
является
наличие
прогнозирования
у
изучаемого
свойства
объекта
инерционности
социально-экономического
и
достаточный
объем
фактографической (статистической) информации по объекту, представленной в
общем случае в виде указанном в п.2.1
Под
статистической
или
регрессионной
моделью
понимается
статистическая зависимость одной переменной (зависимой, эндогенной,
результирующей и т.п.) от одной или нескольких независимых (объясняющих,
предопределенных, экзогенных, предикторов, регрессоров, факторов и т.п.)
переменных. В общем случае такая модель записывается в виде уравнения
y f (X )
y – значение зависимой переменной;
(1)
, где
172
X – вектор независимых переменных;
f ( X ) - неслучайная составляющая (уравнение регрессии) изучаемого процесса;
– случайное отклонение (случайное возмущение) с нулевым
2 , i j
математическим ожиданием и ковариацией cov( i , j ) ( i j )
, где i и
0, i j
j – индексы соответствующих наблюдений. Часто дополнительно на случайную
компоненту
накладывается
условие
нормальности
распределения,
т.е.
N (0, 2 ) . С учетом последнего обстоятельства говорят, что модель (1)
представляет собой классическую линейную модель множественной регрессии
(КЛММР).
Таким образом, в регрессионном анализе поведение результирующей
переменной y с некоторой случайной погрешностью ε определяется значениями
вектора объясняющих переменных X = (x1, x2, …, xm)T, выступающих в роли
аргументов этой регрессии (функции). Здесь m – число факторов-аргументов,
среди которых, в том числе, может присутствовать и время. Частным случаем
многофакторной регрессии выступает однофакторная, или как ее чаще
называют простая регрессия. Следует помнить, что в последнем случае при
наличии единственного аргумента времени - t модель регрессии принимает вид
трендовой зависимости со всеми вытекающими последствиями (см.п.2.3.3.2),
т.е.:
yt=f(t)+ , где
f(t) - главная тенденция, тренд;
- остаточная компонента, которая в данном случае анализируется с помощью
раннее описанных приемов.
Понятно, что по своей природе зависимая переменная регрессионной
модели всегда является случайной. А вот характер поведения независимых
переменных модели может носить как случайный, так и неслучайный характер.
Это обстоятельство полностью определяется реальной природой изучаемого
объекта прогноза, а также способом его измерения. Наличие либо отсутствие
свойства стохастичности у аргументов функции регрессии напрямую связано
173
как с конкретными дальнейшими модельными построениями, так, что для нас
особо существенно, с теорией и практикой обоснования прогнозных значений
эндогенных переменных. Так как в случае работы с детерминированными
аргументами модели прогноз принимает форму безусловного, а в случае
использования на входе стохастических переменных мы должны оценивать
значения прогноза как условные. В дальнейшем, если не будет делаться
специальных замечаний, по умолчанию объявим значения вектора аргументов
X детерминированным.
Специфика поведения изучаемого объекта прогнозирования проявляется
через конкретное выражение функции регрессионной зависимости, т.е. f ( X ) .
Хотя, безусловно, далеко не все реальные социально-экономические
зависимости носят линейный характер, по ряду весьма существенных причин, о
которых далее будет сказано, на практике аналитики предпочитают работать с
линейными регрессиями. Их теоретическое представление, т.е. полученное на
исходном материале генеральной выборки, будем представлять так:
m
y 0 x j j
j 1
(2),
где =(0,1, . . ., m)T - вектор истинных значений параметров функции
регрессии f ( X ) задачи (1).
Уравнение линейной регрессии, полученное по выборочным данным,
будем представлять следующим образом:
m
y a0 x j a j e
j 1
(3),
при этом оценку зависимой переменной модели y можно представить как
m
yˆ a0 x j a j
j 1
(4),
где a = (a0, a1, …, am)T – вектор-столбец оцененных значений параметров
модели линейной регрессии;
ŷ – модельное значение зависимой переменной y;
174
e = (e1, e2, …, en)T – вектор оценок теоретических значений случайной
составляющей , т.е. фактическая разница между расчетным значением ŷ и
его наблюдаемой величиной y.
Из ранее деланных замечаний понятно, что построение точечного и
интервального прогнозов на основе факторной модели невозможно без
рассмотрения специфики идентификации самой модели факторной регрессии,
ее особенностей.
Важнейшей предпосылкой применения статистических регрессионных
моделей для прогнозирования тех или иных социально-экономических
показателей (значений переменной y) является уверенность в неизменности во
времени общих тенденций в развитии или механизмов порождающих
соответствующие взаимосвязи между объектами.
Как ранее уже обсуждалось, процедура прогнозирования на основе
эконометрических моделей в общем случае весьма объемна и содержит
большое количество отдельных этапов. Общий состав главных элементов
процедуры прогноза на основе КЛММР и их взаимосвязи представлен на рис. 4.
Остановимся подробнее на главных моментах, связанных с построением
модели-генератора прогноза, а также правилами самого получения прогнозной
информации.
Построение регрессионной модели предполагает решение двух задач.
Первая заключается в выборе состава независимых переменных и класса
функции f(x). Этот этап называется исходной спецификацией модели. Она
подразумевает, прежде всего:
- выделение состава экзогенных переменных;
- обоснование характера возможных взаимосвязей между эндогенной и
экзогенными переменными (в том числе корреляционный анализ);
- обоснование
возможных
трансформаций
представления
данных;
- исходное тестирование экзогенных переменных;
исходных
175
1. Выявление проблемы
2. Поиск и сбор данных
3.Качественная и
количественная оценка
временных рядов показателей
4. Результат
удовлетворяет?
6. Формулирование основных
гипотез
7. Выбор формы функции
регрессии
5. Спецификация модели
8. Решение проблемы
фиктивных переменных
9. Обоснование состава
экзогенных переменных
12. Оценка и интерпретация
параметров модели
10. Обоснование типов связей
переменных
11. Оценка возможных
трансформаций данных
13. Анализ информационной
пригодности модели:
дисперсионный анализ;
анализ остатков
14. Характеристики
модели
удовлетворительны?
15. Уточнение спецификации модели:
состав переменных; характер связей;
гетероскедастичность остатков;
мультиколлинеарность экзогенных
переменных; автокорреляция
остатков
16. Изменения в исходных
данных
да
17. Оценка прогностических
свойств модели
18. Отбор лучшей
прогностической модели
19. Прогнозирование (задание)
экзогенных переменных
20. Построение точечного и
интервального прогноза
Рисунок 4. Состав основных этапов общей процедуры прогноза на основе
множественной регрессионной модели.
176
обоснование возможного расширения исходных данных за счет добавления
к регрессорам переменных-манекенов;
- исходное тестирование экзогенных переменных;
- выбор формы уравнения регрессии.
Данный перечень задач решается на основе формально-логического
анализа
взаимосвязи
переменных,
корреляционного
анализа,
анализа
специальных характеристик динамических рядов (см.п.2.3.2.), с помощью
соответствующих статистических тестов и т.д. Для трендовых моделей для
решения этой задачи полезно применить сглаживание исходного временного
ряда.
Вторая важнейшая задача на стадии построения модели, – фактическое
оценивание параметров функции f(x), в частности, в случае линейной регрессии
– параметров a j , j 0; m .
Методы
конкретной
оценивания
реализацией
параметров
общего
уравнения
принципа
регрессии
максимума
является
правдоподобия.
Сформулируем его следующим образом. Наилучшим описанием явления
является то, которое дает наибольшую вероятность получения в результате
измерений именно те значения, которые и были фактически получены.
Специальные
рекомендации
по
построению
так
называемой
функции
правдоподобия даются в зависимости от специфических характеристик
распределения случайной ряда зависимой переменной.
Так, например, при нормальном или близком к нему распределении
случайной ряда (т.н. распределение Гаусса), идентификация проводится
непосредственно методом максимального правдоподобия либо методом
наименьших квадратов (МНК). Если же, например, распределение подчинено
закону Лапласа предпочтение отдается методу наименьших модулей (МНМ) и
т.д.
Для оценивания параметров нормальной КЛММР можно воспользоваться
методом максимального правдоподобия (ММП), который решает задачу
177
максимизации функции правдоподобия, которую в общем виде можно
представить соотношением:
n
L ( z ; ) f ( zi ; ) ,
i 1
где f(z; ) – известная функция, описывающая закон распределения
вероятностей случайной величины z и зависящая от неизвестного параметра .
В нашем случае функция правдоподобия:
n
n
L( ; a, ) f ( i ; a, )
2
2
i 1
i 1
1
exp 2 (Y Za) (Y Za) .
2
2
1
2
Оценки параметров a = (a0, a1, …, am)T, полученные ММП совпадают для
нормальной КЛММР с оценками, полученными МНК. Соответственно, эти
оценки обладают теми же свойствами, что и оценки МНК. Кроме того,
известно, что оценки параметров КЛММР подчиняются (m+1)-мерному
нормальному закону распределения вероятностей, с вектором средних
значений, равных теоретическим значениям исследуемых параметров и
ковариационной матрицей cov(a)=σ2(ZTZ)–1.
ММП позволяет также получить оценку параметра дисперсии случайной
составляющей σ2:
1
n
ˆ 2 e e .
При этом несмещенная оценка дисперсии случайной составляющей:
s2
n
1
ˆ 2
e e .
n m 1
n m 1
ММП-оценка дисперсии случайной составляющей состоятельна при
условии, что наименьшее собственное значение матрицы ZTZ стремится к
бесконечности с неограниченным увеличением объема выборки [3].
Кроме того, известно, что случайная величина (n–m–1)s2/σ2 подчиняется
χ2-распределению с (n–m–1) степенями свободы, а также что оценки a и s2
статистически независимы.
178
Указанные методы эффективно оценивают линейную регрессию и
зависимости, сводимые к линейным. Поэтому подробно рассмотрим именно
линейно-регрессионные модели.
Информацией для оценки параметров регрессии служат наблюдения над
зависимыми и независимыми переменными. В i-ом наблюдении фиксируется
значение зависимой переменной y i и совокупности независимых факторов:
xi1, xi 2 ,..., xim . Информация обо всех наблюдениях сводится в вектор Y и
матрицу X вида:
y1
y
Y 2
y
N
;
x11
x
X 21
x
N1
x12
x 22
xN 2
x1m
x2m
,
x Nm
где n – число наблюдений.
Суть любого метода оценки параметров линейной регрессии состоит в
том, чтобы построенная гиперплоскость (2) оказалась в каком-то смысле
наиболее близкой ко всем наблюдениям. В случае однофакторной линейной
зависимости
данную
задачу
можно
проиллюстрировать
изображением,
представленным на рис. 5.
y
*
*
yi
yˆ a0 a1 x
А *
ei
ŷ
*
*
*
xi
Рис.5.
регрессии.
Графическая
x
иллюстрация
восстановления
модели
парной
179
2.4.1. Оценка параметров линейной регрессии с помощью
метода наименьших квадратов
Идея метода наименьших квадратов (МНК) широко известна [1, 31, 32,
38, 39, 46, 52, 59 и т.д.] и строится на основе т.н. принципа Лежандра, который
состоит в том, что мерой отклонения совокупности наблюдений от регрессии
n
считают сумму квадратов отклонений
e
i 1
2
i
фактического значения эндогенной
переменной от ее расчетного модельного (иногда говорят – прогнозного)
значения. Решается следующая задача безусловной оптимизации:
n
Q ei2 min ; где
2
i 1
m
y i a 0 xij a j ei , i 1, n.
j 1
(5).
МНК дает явное выражение оценок a j через исходные данные при
выполнении очевидных условий относительно структуры и состава элементов
матрицы значений экзогенных переменных X. Введем дополнительные
обозначения, пусть:
a (a1 ,..., a m ) T – искомый вектор параметров задачи (5);
e (e1 ,..., e n ) T
– вектор отклонений фактических значений эндогенной
переменной от соответствующих расчетных (модельных) значений;
( 1 ,..., m ) T - вектор истинных значений параметров задачи (5);
l (1,...,1) T - n-мерный служебный единичный вектор.
В этих векторных обозначениях задача (5) легко сводится к хорошо
известным задачам безусловной оптимизации:
Q 2 eT e min ;
Y Xa a0 l e ;
180
откуда
Q 2 (Y Xa a0l )T (Y Xa a0l )
Y T Y aT X T Xa a02 n 2a0l T Y 2aT X T Y 2a0 aT X T l .
Как известно, необходимым условием существования минимума функции
2
Лежандра Q (a0 , a) является равенство нулю ее градиента. В силу свойств
функции Q 2 это условие и будет одновременно и достаточным условием
существования экстремума в точке. Найдя градиент функции
Q2 , и
приравнивая его к нулю, получим:
2na 0 2l T Y 2a T X T l
0.
Q
2 X T Xa 2 X T Y 2a X T l
0
2
(6)
Система уравнений (6) носит называние системы нормальных уравнений.
Способы ее решения приводятся во множестве источников [21, 27, 28, 32, 33,
34, 63 и др.].
Используя первое уравнение системы (6), без труда можем получить
выражение для свободного члена регрессии, а именно:
l T Y l T Xa
a0
.
n
n
Введя дополнительные обозначения для среднего значения ряда
зависимой переменной Y через Y , а вектор-строки средних значений
независимых переменных - через X и исходя из определения средних значений
ряда переменных, можем записать:
lTY
lT X
Y
;X
,
n
n
сделав
соответствующую
подстановку,
окончательно
можем
получить
следующее выражение для a 0 :
a 0 Y Xa .
(7).
Для использования выражения (7) следует провести оценку параметра а,
которую получают, используя так называемые центрированные переменные.
181
Т.е. переменные исходного ряда, очищенные от значения среднего уровня по
ряду. Таким образом, для получения центрированных переменных из значений
зависимой и независимых переменных вычитают их средние значения а
именно:
Y ' Y Yl; X ' X lX ,
(8),
где Y ' и X ' - столбец и матрица центрированных наблюдений над зависимой и
независимыми переменными.
В центрированных переменных значения вектора отклонений e может
быть выражено несколько проще. Используя соотношение (7), имеем:
e (Y 'Y l ) ( X 'lX )a a0 l Y ' X ' a (Y Xa a0 )l Y ' X ' a.
Запишем
представление
оптимизируемой
функции
Q2 в
новых
обозначениях, и найдем градиент функции и приравняем его к нулю, т.е.:
Q 2 2( X ' ) T X ' a 2( X ' ) T Y ' 0.
(9).
Система уравнений (9) называется системой нормальных уравнений в
центрированных переменных. Отсюда возможно получить значения вектора
искомых параметров а в центрированных координатах, т.е.:
a [( X ' ) T X ' ]1 ( X ' ) T Y '
(10).
Таким образом, соотношения (7) и (10) делают возможным выражение
оценок коэффициентов регрессии через исходные данные в центрированных
координатах.
Следует заметить, что элементы формулы (10) имеют и вполне
самостоятельное значение. Для этого стоит вспомнить, что,
cov( x) ( X ' ) T X ' ;
cov( x, y) ( X ' )T Y '
(11),
где cov( x ) - матрица коэффициентов ковариации независимых переменных;
cov( x, y ) - вектор коэффициентов ковариации независимых и зависимой
переменных.
182
Таким образом, альтернативное представление выражения (10) можем
записать следующим образом:
a [cov( x)] 1 cov( x, y)
(12).
В заключение следует заметить, что часто формулы для оценок
коэффициентов регрессии выводят, используя исходное представление данных,
а не их центрированные координаты, например, в [68]. В этом случае считают,
что а0 - оценка коэффициента регрессии при переменной х0, значение которой
во всех наблюдениях равно единице. В этом случае матрицу экзогенных
переменных Х с присоединенным единичным столбцом, соответствующим
детерминированной переменной х0 обозначим через Z. Обычно ее называют
расширенной
матрицей
экзогенных
переменных.
Заметим,
если
рассматривается регрессия без свободного члена, матрицы X и Z совпадают. В
этом случае вектор параметров уравнения линейной регрессии вычисляется с
использованием следующей формулы:
a0
1 T
T
Z Z Z Y .
a
(13).
Использование той или иной формулы расчетов параметров уравнения
линейной регрессии определяется спецификой решаемой задачи, а также
субъективными предпочтениями исследователя.
2.4.2. Оценка точности прогноза на основе уравнения
многофакторной линейной регрессии
Основные этапы в построении прогнозов зависимой переменной на
основе факторной регрессионной модели могут быть представлены следующей
последовательностью шагов:
а) вне рамок модели получают прогноз значений всех предопределенных
переменных (в том числе независимых, «прогноз» времени, если оно входит в
183
число независимых переменных, лаговых переменных и т.п.), в дальнейшем
вектор прогнозных значений предопределенных переменных обозначим как хр;
б) осуществляется точечный прогноз среднего значения зависимой
переменной по уравнению регрессии (4), исходя из результатов его оценивания:
y (x P ) a 0 (x P ) T a ;
в) с заданной надежностью строиться доверительный интервал прогноза
зависимой переменной y(xp).
Построение доверительного интервала прогноза существенно зависит и
определяется
свойствами
распределения
случайных
отклонений
i
наблюдаемого ряда, а также свойствами оценок коэффициентов уравнения
регрессии. Рассмотрим эти вопросы в отношении МНК.
Правомерное использование метода наименьших квадратов возможно
лишь в условиях безусловного выполнения ряда обязательных предположений
относительно i , известных как классические требования метода. Они
включают в себя следующие гипотезы [3, 25, 38, 39]:
1) математическое ожидание отклонений
i равно нулю (ограничение
следует из общего представления регрессионной зависимости):
М i =0, i 1; n ;
2) отклонения
некоррелированы
(свойство
взаимной
некоррелированности остатков):
M i j =0, i j ;
3) отклонения
имеют одинаковую конечную дисперсию (свойство
гомоскедастичности остатков):
D i =M( i )2 =2, i 1; n .
Гипотезы
2
и
3
иногда
формулируют
как
единое
требование
2 , i j
– это соотношение описывает сразу два свойства,
cov( i , j ) ( i j )
0, i j
которыми предположительно обладают случайные регрессионные остатки:
184
свойство
взаимной
некоррелированности,
а
также
свойство
гомоскедастичности (неизменности дисперсий регрессионных остатков).
Кроме того, дополнительно предполагается линейная независимость
столбцов
матрицы
независимых
переменных
(свойство
отсутствия
мультиколлинеарности столбцов матрицы Х), т.е.
4) (X1, X2, …, Xm) – неслучайные (детерминированные) переменные;
5) rangZ=m+1<<n, где
1 X 11
1 X 12
Z
1 Xn
1
X m1
X m2
.
X mn
В общей матричной форме уравнения регрессии и ограничения КЛММР
иногда называют условиями Гаусса-Маркова [] и выглядят они следующим
образом:
(14)
Y Z
0
n
2
cov( ) ( ) n
( X , X ,, X ) - неслучайные переменные
m
1 2
rang Z m 1 n
,
где Y = (y1, y2, …, yn)T – вектор-столбец наблюдений эндогенной переменной;
a = (a0, a1, …, am)T – вектор-столбец неизвестных значений параметров;
ε = (ε1, ε1, …, εn)T – вектор-столбец регрессионных остатков;
0n = (0, 0, …, 0)T – вектор-столбец, состоящий из n нулей;
cov(ε) – матрица коэффициентов ковариации регрессионных остатков;
En – единичная матрица размерности n n.
Выполнение
этих
условий
гарантирует
у
параметров
уравнения
регрессии, полученных с помощью МНК наличия следующих определяющих
характеристик: свойства несмещенности, эффективности в классе линейных
относительно Y несмещенных оценок, а также состоятельности при условии,
что наименьшее собственное значение матрицы XTX стремится к бесконечности
185
с неограниченным увеличением объема выборки. Напомним следующие
важные для дальнейших рассуждений определения.
1. Оценка a параметра α называется несмещенной, если ее математическое
ожидание равно этому параметру: M a j = a j , j .
2. Оценка называется состоятельной, если по мере роста числа наблюдений
она сходится по вероятности к оцениваемому параметру, т.е. если для
любого сколь угодно малого ξ > 0 справедливо предельное неравенство:
lim P{|â – а| ≤ ξ} = 1 или иначе lim Da j 0 .
n
n
3. Эффективности, т.е. в классе линейных несмещенных оценок любая
другая оценка параметра ЛММР будет иметь большую дисперсию. Иначе
говоря, оценка а* называется эффективной оценкой параметра а в классе
оценок А, если ее дисперсия является минимальной среди оценок этого
Dа .
класса: Dа* = min
ˆ ˆ
a A
Покажем наличие у оценок МНК указанных свойств в соответствующих
предположениях
относительно
распределения
остатков
объясняемой
переменной.
Докажем
несмещенность
оценок
математическое ожидание оценок
a
M 0
a .
МНК,
для
чего
Используя формулу (13) и
предполагаемые свойства остатков, имеем:
a
M 0 M [( Z T Z )1 Z T ( Z 0 )] M 0 ( Z T Z )1 Z T ]
a
0 ( Z T Z )1 Z T M 0
.
вычислим
186
Таким образом, оцененные значения параметров уравнения регрессии в
точности совпали с их истинными значениями, следовательно, оценки
оказались несмещенными.
Для доказательства состоятельности оценок вычислим их дисперсию, т.е.
a0
a0
вектор D a . Для вычисления D определим матрицу ковариаций оценок
a
a0
a0
D
cov
a , диагональные элементы которой и представляют собой a .
Используя формулу (13), имеем следующее соотношение для вычисления
элементов матрицы ковариаций оценок (обозначим его (15)):
a 0 0 a 0 0 T
a0
cov M
a
a
a
M Z T Z
M ZTZ
1
1
Z Z 0 0 Z T Z
T
Z T T Z Z T Z
1
Z
T
Z
1
1
Z Z 0 0
T
T
Z T M ( T ) Z Z T Z
1
.
Отдельно рассмотрим выражение М( T ). Учитывая вторую и третью
гипотезы относительно свойств случайной составляющей i , имеем:
12
M ( T ) M 2 1
N 1
2 0
0 2
0
0
1 2
22
N2
1 N M ( 12 )
M ( 1 2 )
2 N M ( 2 1 )
M ( 22 )
2
N M ( N 1 ) M ( N 2 )
M ( 1 N )
M ( 2 N )
M ( N2 )
0
0
2
E,
2
де Е - единичная матрица размерности nn. С учетом формулы (15) получим:
a
cov 0 2 ( Z T Z ) 1 .
a
(16).
г
187
Истинное значение параметра 2 неизвестно. Однако его несмещенной
оценкой s2 является средний квадрат отклонений значений y от регрессии, т.е.:
Q2
eT e
s
n m 1 n m 1
2
(17).
Эта формула доказывается, например, в [3]. Знаменатель формулы (17)
представляет собой число степеней свободы: количество наблюдений,
уменьшенное на число оцениваемых параметров. Величина s называется
стандартной ошибкой оценки параметра уравнения регрессии. Таким образом,
окончательно получили
a0
eT e
2
T
1
cov s ( Z Z )
( Z T Z )1
n m 1
a
(18).
Диагональные элементы матрицы ковариаций оценок выражения (18)
есть не что иное, как дисперсии свободного члена и коэффициентов уравнения
регрессии. Это важный дополнительный факт для построения доверительных
интервалов параметров факторной модели. Кроме того, из соотношения (18)
очевидно, что свойство состоятельности оценок (3), полученных с помощью
МНК, выполнено.
Доказательство эффективности оценок подтверждается теоремой ГауссаМаркова [39]. Сформулируем ее содержание.
Если выполняются следующие три предположения:
1. Y Z .
2. Z - детерминированная размерностью (n (m 1)) матрица с рангом
( m 1) .
T
2
3. М ( ) 0; М ( ) E
Тогда оценка некоторого вектора параметров
полученная
c
помощью
МНК,
а ZTZ
1
Z TY ,
уравнения (2),
является
наиболее
эффективной с точки зрения минимальной дисперсии (т.е. наименьшего
2
значения ) оценкой в классе линейных по вектору Y несмещённых оценок
уравнения регрессии.
188
Проведем доказательство. Для простоты рассуждений введём следующее
T
промежуточное обозначение, пусть А Z Z
1
Z T , тогда а АY .
Любую другую линейную оценку вектора параметров без ограничения
общности можем записать, как
а * ( А B)Y , где
B
- некоторая не
вырожденная матрица размерностью (( m 1) n) . Таким образом, вектора оценок
параметров линейной регрессии a и a* получены путем оперирования
соответственно с матрицами A и (A+B), где A ( A B) .
Для проведения дальнейших рассуждений здесь примем за основу
следующие уже доказанные факты:
1. Из свойства несмещенности оценок, полученных с помощью МНК,
имеем М (a ) .
2. Из следствия свойства состоятельности оценок, полученных с
помощью МНК, имеем cov( a) 2 (Z T Z ) 1 .
3. Кроме того, очевидным является следующее утверждение, если
Z Z
T
1
Z T Z I , то AZ I .
*
Из условий несмещённости а имеем:
М (a * ) , т.е.
М (( A B)Y ) ( A B) М (Y ) ( A B) М ( Z ) ( I BZ ) .
Таким образом, очевидно для наличия у вектора a* свойства
несмещенности необходимо, чтобы выполнялось следующее равенство BZ 0 .
Оценим
ковариацию
параметров
a* ,
для
чего
воспользуемся
промежуточной выкладкой, а именно:
(a* ) (( A B)Y ) ( A B)( Z )
( A B)Z ( A B) )
( AZ ) BZ ( A B) ) ( AZ 1) BZ ( A B) ) ( A B) .
*
*
*
T
Тогда cov( a ) М (a )(a )
= М ( A B) T ( A B) T
=
( A B) 2 I ( A B) T
... 2 ( Z T Z ) 1 2 BB T .
189
Что означает выполнение следующего равенства
cov( a * ) cov( a) 2 BB T , таким образом,
cov( a * ) cov( a) .
Установленный факт являются доказательством утверждения о том, что в
классе линейных по вектору
оценки,
полученные
Y
несмещённых оценок уравнения регрессии (2)
методом
наименьших
квадратов,
гарантируют
эффективность оценок регрессии в смысле минимизации их дисперсии.
Найдем теперь окончательно доверительный интервал, в котором с
заданной
надежностью
будет
находиться
фактическое
значение
прогнозируемой зависимой переменной у(хр). Как уже ранее было показано
разброс этого значения будет определяться двумя случайными величинами:
разбросом значения
yˆ ( x P ) из-за ошибок оценок коэффициентов
регрессии;
случайным отклонением i .
P
P
2
Итак, Dy ( x ) Dyˆ ( x ) D .
2
Оценку D мы уже получили: это s2. Оценим дисперсию прогноза,
определяемую вероятностным характером построенной модели, т.е. оценим
Dy ( x P ) . Для этого будем использовать вектор Zp, представляемый как
1
Z p p .
x
Используя соотношение (4) имеем:
T
p T a 0
a 0 a 0 0 P
p T 0
z
Dyˆ ( x ) D ( Z ) M ( Z )
a
a
a
a
a
0
0
P
a
( Z p ) T cov 0 z P s 2 ( Z p ) T ( Z T Z ) 1 Z p
a
Отсюда получаем общую оценку дисперсии прогноза, построенного на
факторной регрессионной модели:
190
Dy ( x P ) s 2 [1 (Z p )T ( Z T Z ) 1 Z p ] .
(19).
P
Обозначив стандартную ошибку прогноза, как s p Dy( x ) , получим:
s p s 1 ( Z p ) T ( Z T Z ) 1 Z p .
Окончательно, доверительный интервал значения у(хр) с надежностью
100(1-q)% можно определить по формуле:
y( x p ) [ yˆ ( x p ) t1q / 2 s p ; yˆ ( x p ) t1q / 2 s p ] ,
(20).
где t1-q - 100(1-q)% процентиль (табличное значение) распределения
Стьюдента с =n-m-1 степенями свободы.
Получение фактической оценки ширины доверительного интервала
прогноза на ЛММР с помощью соотношения (20) позволяет достаточно
детально и комплексно решать задачу определения заданных требований к
качеству прогноза. Как известно, с увеличением значение t1-q уменьшается,
поэтому при увеличении числа наблюдений n доверительный интервал
сужается. На величину этого интервала влияет и хр. При этом лишь качественно
можно утверждать, что при удалении хр от X доверительный интервал
увеличивается. Конкретное утверждение возможно лишь сформулировать, зная
исходный вид регрессионной модели.
Зная общий вид величины доверительного интервала прогноза (20) в рамках
ЛММР, не трудно вывести формулу доверительного интервала трендовой
модели заданного вида. Понятно, что при этом матрица экзогенных
1 1
переменных примет вид: Z ... ... .
1 n
Для прогнозирования на основе модели линейного тренда доверительный
интервал определяется по формуле
ŷ n L
1 (n L t) 2
f(n L) t a s 1 T
n
(t t)2
t 1
(21),
191
где t - значение порядкового номера уровня, стоящего в середине временного
ряда;
n+L - время, на которое осуществляется прогнозный расчет, т.е. L – период
упреждения прогноза;
n – длина ретроспективного периода;
s - среднее квадратическое отклонение фактических наблюдений от расчетных
значений y.
2.4.3. Методы повышения качества модели множественной
регрессии
2.4.3.1. Дисперсионный анализ регрессионной модели
Построение
качественного
прогноза
не
возможно
без
четкой
убежденности относительно качества модели, на которой делается прогноз. В
этой связи очередной раз встает вопрос о критериях оценки качества факторной
модели. Эта проблема решается в рамках т.н. дисперсионного анализа модели
линейной регрессии.
Ранее,
рассуждая
о
возможных
критериях
информационных
и
прогностических оценок моделей прогноза (п.2.2), мы перечисляли различные
способы расчета ошибок, в частности стандартной ошибки оценки. Однако в
связи с использованием в качестве генератора прогноза ЛММР, следовало бы
предположить
возможность
конструирования
некоторых
специальных
критериев оценки пригодности построенной регрессии. С этой целью полезно
было бы проанализировать рис.6 а) и б) и задаться вопросом: в каком случае
прогнозирование следовало бы осуществлять на регрессионной модели, а когда
ей разумнее бы предпочесть прогноз по среднему уровню ряда объясняемой
переменной Y. Ясно, что последняя ситуация отражает факт независимости
выхода модели от значений переменных подаваемых на ее вход, т.е. значений
матриц X или Z. Другими словами, если прогноз на основе регрессионной
192
p
p
p T
модели предполагается осуществить по формуле y y ( x ) a 0 ( x ) a ,
следует выяснить: улучшают ли независимые переменные х1, х2, ..., хm
y p yˆ
y
yp
Qy
y
y p yˆ
yp
Q
Q
Qy
Q yˆ
Q yˆ
y y
p
y
yp y
y
xp
xp
Рис.6.а.
Рис. 6.б.
p
предсказание у по сравнению с простейшим вариантом модели: y y .
Последнее утверждение можно сформулировать как статистическую гипотезу,
требующую соответствующей проверки.
С целью дальнейших рассуждений введем следующие обозначения.
Пусть
(22)
n
n
i 1
i 1
Q y2 ( y i y ) 2 ( y ' i ) 2 (Y ' ) T (Y ' ) - полная вариация или
просто вариация (разброс) признака вокруг своего среднего значения;
n
(23)
QY2ˆ ( yˆ i y ) 2
-
объясненная
вариация
или
вариация,
i 1
обусловленная регрессией;
n
(24)
Q ( yˆ i y i ) 2
2
- вариация необъясненная регрессией или
i 1
остаточная вариация.
Анализ ситуаций, проиллюстрированных на рисунке 6, должен навести на
мысль о том, что общую вариацию признака вокруг средней можно
рассматривать как результирующую от объясненной и остаточной вариации.
При этом, очевидно, что чем большую долю в общей вариации занимает
объясненная, тем более привлекательной для моделирования процесса, а
193
следовательно, и осуществления прогноза становиться ЛММР. Верно и
обратное утверждение, чем больше относительная доля необъясненной
вариации в общей, тем предпочтительней становится модель средней.
Следовательно, моделирование по средней предпочтительнее в ситуации
б), а в ситуации а) по всей видимости, следует предпочесть регрессионную
зависимость. На основе этого наблюдения можно построить некий критерий
оценки качества построения эконометрической модели в виде ЛММР.
Однако для начала следует более строго доказать факт того, что
Qy2 Q 2 QY2 .
Рассмотрим выражение Q2=eTe, его можно представить как:
е T е (Y 'Yˆ ' ) T (Y 'Yˆ ' ).
Подставляя в полученное равенство формулу (10), имеем:
Q 2 e T e [Y '( X ' )[( X ' ) T X ' ]1 ( X ' ) T Y ' ]T [Y '( X ' )[( X ' ) T X ' ]1 ( X ' ) T Y ' ]
(Y ' ) T Y '[( X ' )[( X ' ) T X ' ]1 ( X ' ) T Y ' ]T [( X ' )[( X ' ) T X ' ]1 ( X ' ) T Y ' ]
(Y ' ) T Y '(Yˆ ' ) T Yˆ ' Q 2 Q 2ˆ .
y
y
Таким образом, доказано, что Qy2 Q2 QY2 . Ясно, что значимость
регрессии тем больше, чем больше отношение
Qy2
Q2
, т.е. чем выше доля
вариации регрессии в общей. На этом рассуждении и строиться обоснование
т.н. статистики Фишера или F-критерия Фишера. Вычисляется F-статистика,
учитывающая число степеней свободы, лежащих в обосновании величин
соответствующих вариаций, т.е.:
F
Q y2ˆ
m
:
Q2
,
n m 1
(25)
которая сравнивается с табличным значением Fq(m,n-m-1), где Fq(m,n-m-1) 100q%-я процентиль (табличное значение) распределения Фишера с числом
степеней свободы 1 = m и 2 = n-m-1.
194
Если расчетное значение критерия превышает пороговое, т.е. F>Fq, то с
вероятностью 100(1-q)% регрессия существенна, если F<Fq - то нет, и следует
принять основную гипотезу о верности соотношения y p y .
Таблицы распределения Фишера можно найти в [31, 32]. Для проведения
расчетов обычно составляется таблица дисперсионного анализа, приведенная в
таблице 4.
Таблица 4.
Стандартная структура таблицы дисперсионного анализа.
Источник
Сумма
Число степеней
дисперсии
квадратов
свободы
F-статистика
отклонений
Регрессия
QY2
v1=m
Отклонение от
Q2
v2=n-m-1
Q y2
n-1
регрессии
Полная
Другим
общепринятым
показателем
качества
Q y2ˆ
Q2
F
:
m т m 1
построения
модели
множественной регрессии является коэффициент детерминации (квадрат
множественной корреляции) - R 2 . Он непосредственно указывает на то, какая
доля (можно – процент) вариации результирующей переменной объясняется
влиянием совокупности входных факторов модели. Таким образом,
n
R 1
e
t 1
2
n
( y
t 1
t
2
t
yt )
2
2
Q 2 Qyˆ
1 2 2
Qy Qy
(26).
Традиционная интерпретация критерия Фишера несколько сложнее, чем
критерия R 2 , кроме того, коэффициент детерминации может принимать
ограниченный диапазон значений. Однако совсем нетрудно показать, что
R2 n m 1
F
1 R2
m
(27).
195
Т.е. данные критерии непосредственно взаимосвязаны и меняются в одном
направлении, большим значениям F-критерия соответствуют большие значения
критерия R 2 , верно и обратное утверждение.
Однако, ставя вопрос о выборе лучшей модели среди нескольких
регрессионных уравнений, следует заметить [], что в общем случае
1. критерий R 2 имеет тенденцию к росту при добавлении регрессоров в
модель;
2. критерий R 2 значительно
меняется
при
преобразовании
зависимых
переменных на входе модели.
Попыткой
использование
нивелировать
т.н.
означенные
исправленного
выше
эффекты
(скорректированного)
детерминации, который предлагается
является
коэффициента
рассчитывать в соответствии
со
следующей формулой
R 2 1
1 n 2
et
n m t 1
n
1
( yt yt ) 2
n 1 t 1
1 (1 R 2 )
n 1
nm
(28).
Как правило, скорректированный критерий R 2
несколько меньше
исходного, кроме того, он может принимать отрицательные значения. На
практике существенного превосходства одного коэффициента перед другим не
обнаружено,
поэтому
выбор
конкретного
показателя
остается
за
исследователем.
Дальнейшие исследования формальных свойств построенной модели, в
случае подтверждения гипотезы относительно ее значимости в целом, ведутся в
направлении очистки модели от отдельных несущественных регрессоров. Для
чего на значимость проверяется каждая независимая переменная. Гипотеза
формулируется так: «Равен ли коэффициент aj нулю?» Проверку гипотезы
осуществляют с помощью t-статистики Стьюдента, который ранее уже
рассматривался
коэффициента aj:
(см.
п.[2.3.2]).
Для
этого
вычисляется
t-статистика
196
tj
aj
saj ,
где saj – стандартная ошибка параметра регрессии aj, иначе - квадратный корень
из дисперсии j-го коэффициента регрессии (дисперсия вычисляется по формуле
(18)).
Эта статистика сравнивается по абсолютной величине с табличным
значением t1-q/2 (n-m-1), где tq(n-m-1) - 100q%-я процентиль распределения tстатистики Стьюдента с v=n-m-1 степенями свободы.
Если |tj|> t1-q/2 , гипотеза о равенстве нулю коэффициента регрессии
отвергается с вероятностью 100(1-q)%, в противном случае – принимается, т.е.
соответствующий параметр признается значимым. Таблицы распределения
Стьюдента можно найти в [31, 32].
С
целью
обнаружения
информационными
и
моделей
прогностическими
регрессии
с
наилучшими
характеристиками
исключение
незначимых переменных из модели осуществляют пошагово с перестройкой
параметров модели на соответствующих итерациях.
2.4.3.2.Уточнение спецификации статистической модели
Построение адекватной эконометрической модели (в широком смысле) с
целью дальнейшего
ее
использования
для
обоснования и
получения
эффективной прогнозной информации в общем случае, как известно,
укрупненно формулируется как последовательность ряда взаимосвязанных
этапов.
1. Спецификация модели, т.е. качественное выражение, формулирование наших
представлений
Источником
об
их
объекте
являются
социально-экономического
существующие
общепринятые
исследования.
результаты
экономической теории, а также специфические представления и интуиция
исследователей относительно особенностей протекания рассматриваемого
197
процесса
в
конкретных
временных,
ресурсных,
пространственных,
институциональных и т.п. условиях.
2. Идентификация модели или ее оценивание, т.е. придание количественной
формы качественным представлениям об объекте.
3. Верификация
модели, т.е. оценка степени
пригодности
полученной
эконометрической модели информационным и прогностическим требованиям,
предъявляемым к ней, а так же выработка рекомендаций по улучшению
характеристик информационной и прогностической пригодности модели.
4. Эксплуатация модели, т.е. использование регрессионной факторной модели в
качестве генератора прогнозной информации, а также проведение работ по
оценке эффективности получаемой прогнозной информации и проведение
соответствующих адаптационных настроек.
Таким образом, в
узком
и
очень
конкретном понимании
под
спецификацией эконометрической модели имеют в виду формализацию
математического описания модели, которая используется при составлении
регрессионной модели, а также совокупность исходных предположений
относительно объясняющих переменных и возмущений модели. Согласно
этому определению на этапе спецификации исследователем решаются
следующие задачи:
- формулировка конкретных целей, задач и условий составления прогноза
средствами
эконометрического
моделирования
на
основе
четко
выявленной проблемы управления социально-экономическим объектом;
- определение необходимого состава информации об исследуемом объекте
с выделением в нем экзогенных и эндогенных переменных;
- формулировка гипотез относительно направленности и результативности
причинно-следственных взаимосвязей в рамках конструируемой модели,
относительно как формы статистических соотношений и тождеств, так и
общей структуры эконометрической модели в целом, а также составление
списка предопределенных переменных модели;
198
- формулировка исходных гипотез относительно природы случайных
составляющих моделей наблюдаемых переменных.
Этап спецификации модели во времени относительно процедуры оценки
модели четко делится на два периода: Предмодельная спецификация и
постмодельное уточнение спецификации эконометрической модели.
Особо следует остановиться на рассмотрении типичных ошибок
спецификации. В общем случае они сводятся к следующему перечню:
1. игнорирование существенной переменной;
2. включение в модель незначимой переменной, не влияющей на
значение результирующего признака в выбранном варианте описания
взаимосвязей модели;
3. использование
не
соответствующих
математических
форм
зависимости; параметры не укладываются в отведённые им интервалы;
4. оценивание ложной регрессии;
5. мультиколлинеарность переменных;
6. гетероскедастичность возмущений;
7. наличие автокорреляции случайных возмущений (остатков).
Наличие подобного рода ошибок в построенной эконометрической
модели
обычно
приводит
к
следующим
последствиям
к нарушению
стандартного набора требований к набору удовлетворительных параметров
модели, а именно к смещённости, несостоятельности и неэффективности
оценок модели. При этом наличие ошибок 5, 6 и 7-го видов ставит под
сомнение
вообще
возможность
использования
стандартных
методов
оценивания параметров регрессий.
Как обнаружить отмеченные ошибки построения статистической модели?
Можно дать следующие общие рекомендации:
- логический анализ при проведении спецификации модели;
- оценка статистических характеристик в процессе дисперсионного
анализа;
199
- оценка статистических характеристик в процессе корреляционного
анализа;
- специальные исследования остатков модели;
- проведение разнообразных статистических тестов для возможного
обнаружения автокорреляции (членов временного ряда, остатков).
Обнаружение и коррекция ошибок спецификации на предмодельной и
постмодельной
стадиях
построения
и
исследования
качества
ЛММР
невозможно без использования методов корреляционного статистического
анализа.
2.4.3.3. Корреляционный анализ в уточнении спецификации
регрессионной модели
Методы корреляционного статистического анализа хорошо известны и
описаны во множестве учебников и научных работах [1, 25, 31 и др.].
Принципиальными моментами в ходе построения регрессионной модели
и ее использования в прогнозировании важны ответы на вопросы о том, велика
ли теснота связи между:
независимыми переменными;
зависимой и указанной независимой переменной;
зависимой переменной и совокупностью независимых переменных.
Получение ответов на эти вопросы важно, прежде всего, с целью
проверки
исходных
постулатов
регрессионного
анализа
относительно
независимости совокупности экзогенных переменных на входе ММЛР, а также
для
установления
характера
и
степени
взаимосвязи
объясняемой
и
объясняющих переменных модели. Желательно, чтобы все независимые
переменные были слабо связаны друг с другом (это означало бы отсутствие
мультиколлинеарности рядов факторов), а с зависимой – сильно (что связано с
информационными и прогностическими характеристиками модели).
200
Степень тесноты линейной связи между двумя переменными xi и xj
оценивают при помощи коэффициента парной корреляции rij, вычисляемого по
формуле:
n
rij
x
T
ki
k 1
n
n
( x
k 1
xkj
T
ki
) ( xkj )
2
2
( X i) T ( X j )
( X i) T ( X i)( X j ) T ( X j )
(29).
k 1
Для зависимой переменной у и независимой xj аналогичный коэффициент
ryx вычисляется по формуле:
n
ryx
y
k 1
'
k
xkj
n
n
( y ) ( x )
2
k 1
k
k 1
2
(Y ) T ( X j )
(Y ) T (Y )( X j ) T ( X j )
.
(30)
kj
Коэффициенты rij объединяются в матрицу коэффициентов корреляции
независимых переменных R, а rij - в вектор коэффициентов корреляции
зависимой и независимых переменных Ry.
Фактические значения коэффициентов корреляции rij, как известно из
теории, лежат между -1 и 1, причем возможно выделить три предельных
случая, а именно:
rij=-1 - сильная отрицательная связь;
rij=0 - отсутствие связи;
rij=1 - сильная положительная связь.
Весь
спектр
промежуточных
значений
rij
исследователь
может
интерпретировать, исходя из своих соображений. Однако для анализа
неслучайности обнаруженных связей можно рекомендовать осуществить
проверку коэффициентов корреляции на значимость, например с помощью
статистики Стьюдента.
Матрицу коэффициентов корреляции независимых переменных R можно
получить из cov( x ) , а вектор коэффициентов корреляции зависимой и
независимых переменных Ry - из вектора cov( x, y) . Для этого введем
обозначения:
201
n
Q 2j ( x' kj ) 2 ( X ' j ) T ( X ' j ),
k 1
j 1; m .
n
Q ( y ' k ) (Y ' ) (Y ' )
2
y
2
T
k 1
Числа Qj2 расположены на главной диагонали матрицы cov( x) . Составим
диагональную матрицу U из чисел Qj:
Q1
0
U
0
0
0
0
.
0
Qm
0
Q2
0
0
Очевидно, что
U
1
1
Q1
0
0
0
0
1
Q2
0
0
0
0
.
0
1
Qm
Окончательно получаем, что
R U 1 cov( x)U 1 ;
Ry
(31.а)
1 1
U cov( x, y).
Qy
(31.б).
Вспомнив формулу (12) становиться очевидным, что выражение оценок
коэффициентов
регрессии
а
можно
получить
непосредственно
через
коэффициенты корреляции. Таким образом, из формул (12) и (31) не трудно
получить:
a [cov( x)]1 cov( x, y) QyU 1 R 1 Ry
Введя новое обозначение = R-1Ry,
полезный факт:
(32).
, дополнительно имеем следующий
202
Qy
Q1
a 0
0
0
или a j
0
0
0
Qy
Qm
0
Qy
Q2
0
0
Qy
Qj
* j , j=1, ..., m.
(33).
Теснота связи зависимой переменной и совокупности независимых
факторов измеряется при помощи коэффициента множественной корреляции r,
вычисляемой по формуле:
n
r 1
e
i 1
2
i
n
( yi ' ) 2
(34).
i 1
Используя введенные обозначения, получим:
r RyT R 1 Ry T Ry .
(35)
Вычисленное значение r используется так же, как rij или ryxj. Когда
значение r близко к 1, можно считать, что вариация у полностью объясняется
вариацией совокупности независимых переменных, т.е. не имеет смысла
учитывать какие-либо дополнительные переменные.
Величина r2 называется коэффициентом детерминации (см. соотношение
(29)). Ее использование аналогично r.
2.4.3.4. Мультиколлинеарность, признаки и причины
Понятие мультиколлинеарность выражает наличие полной или частичной
линейной связи между экзогенными переменными модели. При этом различают
[] полную и частичную мультиколлинеарность переменных.
203
Полная мультиколлинеарность (мультиколлинеарность в строгом смысле)
обнаруживается в случае нарушения ограничения на ранг матрицы Z, т.е. если
оказывается, что: rangZ<m+1.
Данное неравенство означает, что не все столбцы матрицы Z являются
линейно независимыми, т.е. между ними (а значит и между соответствующими
экзогенными переменными) существует линейная функциональная связь:
значения по крайней мере одного из них могут быть выражены в виде линейной
комбинации значений других столбцов. При этом матрица ZТZ оказывается
вырожденной, т.е. ее определитель равен нулю, и это не позволяет оценить
параметры регрессии МНК. Полную МНК, однако, легко выявить и избежать.
Реальная
существования
(частичная)
достаточно
мультиколлинеарность
тесных
возникает
статистических
в
связей
случае
между
объясняющими переменными.
Для выявления наличия или отсутствия мультиколлинеарности не
существует точных количественных критериев. Однако существуют некоторые
правила, позволяющие осуществить такую проверку. Приведем некоторые из
них:
1. Анализируется матрица выборочных парных коэффициентов корреляции
R, составленная из элементов (29).
1
r
R 21
rm1
r1m
1 r2 m
rm 2 1
r12
rij r ( X i , X j )
(36),
( X i X i ) ( X j X j )
( X i X i ) ( X i X i ) ( X j X j ) ( X j X j )
,
где X i ( X i(1) , X i( 2 ) ,, X i( n ) ) – вектор наблюдений i-й объясняющей переменной –
i-й вектор-столбец матрицы Х; X i ( X i , X i ,, X i ) – n-мерный вектор-столбец,
состоящий из выборочных средних значений соответствующего фактора.
Считается,
что
мультиколлинеарность
объясняющих
переменных
присутствует, если значения соответствующих коэффициентов корреляции
204
превосходят по абсолютной величине 0.75-0.80 [3]. При этом следует помнить,
что применение специальных процедур устранения данного эффекта с учетом
их вычислительной сложности не всегда оправдан. Так специалисты считают,
что при достаточно высоких показателях общей надежности построенной
модели (например, при R 2 >0) на ее прогностические свойства эффект
мультиколлинеарности не сказывается [14, с.277].
2. Анализируется матрица ZTZ.
Если значение определителя матрицы ZTZ близко к нулю, то это
свидетельствует
о
наличии
мультиколлинеарности.
Близость
к
нулю
определителя называется также слабой обусловленностью матрицы. Эта
ситуация возникает в случае существования тесных линейных статистических
связей
между
столбцами
матрицы
Z
(т.е.
между
соответствующими
факторами).
3. Анализируются собственные значения матрицы ZTZ .
Вывод о присутствии мультиколлинеарности делается в случае, если близко
к нулю минимальное собственное значение матрицы ZTZ, т.е. минимальный
корень уравнения
det(ZTZ – λEm+1) = 0.
Из близости к нулю минимального собственного значения матрицы следует
близость
к
нулю
ее
определителя,
и
наоборот.
Но,
кроме
того,
среднеквадратическая ошибка оценки параметра регрессии аj, полученная с
помощью
МНК,
обратно
пропорциональна
величине
минимального
собственного значения матрицы ZTZ, соответственно это собственное значение
может характеризовать среднеквадратическую ошибку.
4. Анализируются значения выборочных коэффициентов детерминации
R X2 j X ( j )
каждой
из объясняющих
объясняющим переменным
переменных
Xj
по
всем
остальным
X(j) = (X1, …, Xj–1, Xj+1, …, Xm)T., вычисление
см.(26).
Следствиями наличия мультиколлинеарности могут являться и следующие
внешние признаки построенной модели:
205
1) некоторые из оценок параметров регрессии аj (полученные МНК)
имеют неправильные с точки зрения экономической теории знаки или
неоправданно большие по абсолютной величине значения;
2) небольшое изменение исходных статистических данных (добавление
или изъятие нескольких наблюдений) приводит к значительному
изменению оценок коэффициентов модели, вплоть до изменения
знака;
3) большинство или все оценки коэффициентов регрессии оказываются
статистически незначимы (статистически незначимо отличающимися
от нуля), в то время как в действительности многие из них имеют
отличные от нуля значения, а модель в целом является значимой при
проверке с помощью F-критерия Фишера или критерия R 2 ;
4) высокие частные коэффициенты корреляции.
Эти факты можно объяснить тем, что в определении МНК-оценок
регрессионных коэффициентов а, а также их ковариационной матрицы,
участвует матрица (ZTZ)–1, элементы которой обратно пропорциональны
величине определителя матрицы ZТZ.
2.4.3.5. Методы устранения мультиколлинеарности
В
общем
случае
вся
совокупность
методов
устранения
мультиколлинеарности делится на две большие группы. Первую составляют
специальные
методы
оценивания
параметров
модели,
гарантирующие
недопущение мультиколлинеарности в процессе ее построения. К ним относят,
прежде всего ридж-регрессию, методы факторного анализа, метод главных
компонент. Вторая представляет собой совокупность эвристических методов и
процедур «очистки» от эффекта мультиколлинеарности в рамках уже
выбранного метода, например МНК.
206
Смещенные методы оценивания.
Одним из методов устранения мультиколлинеарности является переход к
смещенным методам оценивания. Этот подход оправдывается тем, что в
условиях мультиколлинеарности оценки дисперсии даже лучших несмещенных
оценок оказываются достаточно большими, и в расширенном классе оценок
(без требования несмещенности) могут найтись более точные оценки с точки
зрения минимизации среднеквадратической ошибки.
Одним из таких смещенных методов оценивания является так называемая
«ридж-регрессия», или «гребневая регрессия». Этот метод предлагает
рассматривать оценки вида:
â = (XTX + τEm+1)-1XTY,
где τ – некоторое небольшое положительное число (как правило, это величина
находится в диапазоне от 0.1 до 0.4). Его добавление к диагональным
элементам матрицы XTX делает оценки смещенными, но с другой стороны,
благодаря ему, определитель матрицы XTX перестает быть близким к нулю.
При этом доказана теорема, утверждающая, что найдется такое значение τ0, при
котором средние квадраты ошибок смещенных оценок окажутся меньше
соответствующих характеристик для МНК-оценок [3].
Метод главных компонент.
С помощью метода главных компонент осуществляется переход к
ортогонализированным объясняющим переменным. Эти новые объясняющие
переменные представляют собой некоторые линейные комбинации исходных
регрессоров, выбранные так, чтобы корреляции между ними были малы или
вообще отсутствовали [3].
Обозначим X i X i X i центрированный вектор-столбец наблюдений i-й
объясняющей переменной; X’ = ( X 1,, X m ) – (n m)-матрицу центрированных
наблюдений объясняющих переменных; Y’ = Y – Y – центрированный векторстолбец объясняемой переменной.
207
В терминах центрированных переменных Y’ и X’ = X – X = (X1 – X 1, …, Xm –
X m)T уравнение регрессии примет вид:
Y’ = a1 X 1 a2 X 2 am X m + ε,
m
a0 Y ai X i .
i 1
Метод построения регрессии Y на главные компоненты вектора X
заключается в выполнении следующих операций:
1)
Определяются
и
упорядочиваются
собственные
числа
λi
и
соответствующие им собственные векторы li = (li1, li2, …, lim) матрицы X’ТX’.
2) Из собственных векторов матрицы X’ТX’ составляется матрица
коэффициентов преобразования (матрица перехода):
l11 l12
l
l
L 21 22
l m1 l m 2
l1m
l2m
,
l mm
которая по построению является ортогональной: LT = L–1.
3) С помощью матрицы L переходят к вектору главных компонент:
Z = (z(1), z(2), …, z(m))T = LX’.
Соответственно j-е наблюдение вектора главных компонент определится
соотношением:
Z = (zj(1), zj(2), …, zj(m))T = LXcj,
а матрица наблюдений главных компонент:
Z = X’LT.
Уравнение регрессии Y’ по Z имеет вид:
Y’ = c1z(1) + c2z(2) + … + cmz(m) + ε.
МНК-оценки регрессионных коэффициентов определяются, исходя из
соотношения:
cˆ ( cˆ1 , cˆ2 ,..., cˆm ) = (ZTZ)-1ZTY’.
Из построения следует, что матрица ZTZ (матрица XTX в ортогональном
базисе) имеет следующую структуру:
208
0
1
ZT Z
,
0
m
соответственно оценки:
cˆ j
1
j
(z
) Y
( j)
n
1
j
z
i 1
( j)
i
yi
взаимно некоррелированы, что делает их независимыми от числа и состава
включенных в модель главных компонент.
Так как преобразование от исходных признаков к главным компонентам
является ортогональным, то имеют место соотношения:
m
m
m
i 1
i 1
i 1
DX i Dz (i ) i ,
det(ZTZ) = det(X’ТX’).
Если удается дать содержательную интерпретацию включенным в модель
главным компонентам, то оценка функции регрессии Y на главные компоненты
может быть записана в виде:
Y Y j cˆ j z ( j ) ,
j
где δj = 1, если j-я главная компонента включена в модель (в случае ее
статистической значимости); δj = 0, если j-я главная компонента не включена в
модель.
В противном случае необходимо вернуться к исходным переменным.
Оценки
исходной
m
aˆ i j cˆ j l ji , i 1, m ,
j 1
модели
регрессии
определяются
по
формулам
m
aˆ 0 Y aˆ i X i . Полученные параметры модели,
i 1
вообще говоря, будут смещенными [3].
Эвристические методы отбора наиболее существенных объясняющих
переменных
209
Процедуру отбора существенных переменных можно рассматривать как
процедуру выбора размерности линейной модели. Обусловленность матрицы
ZTZ или XTX улучшается с уменьшением числа объясняющих переменных.
Если две объясняющие переменные сильно коррелированы с объясняемой
переменной Y и друг с другом, бывает достаточно включить в модель лишь
одну из них.
Решение задачи отбора наиболее существенных объясняющих переменных
возможно несколькими способами. Один из наиболее распространенных и
эффективных – подход последовательного наращивания числа предикторов,
который реализован в двух вариантах:
1) «Все возможные регрессии». Решается задача: путем полного перебора
всех возможных комбинаций (сочетаний) из k (k = 1, 2, …, m–1) объясняющих
переменных, отобранных из исходного (заданного) набора X1, X2, …, Xm,
определить такие переменные, для которых коэффициент детерминации с
результирующим показателем y был бы максимальным. Таким образом, на k-м
шаге
процедуры
определяется
k
объясняющих
переменных,
наиболее
информативных в классе моделей зависимости y от k предикторов. Строгих
правил выбора оптимального числа предикторов нет. Один из способов,
однако, предлагает воспользоваться формулой:
2
2
Rˆ min
Rˆ adj
(k ) 2 Rˆ 2 ( k ) , где
Rˆ 2 ( k ) –
оценка коэффициента детерминации
R 2 (k )
y по k наиболее
информативным предикторам (в классе моделей зависимости y от k
2
( k ) – нижняя граница доверительного интервала для этого
предикторов); Rˆ min
коэффициента
детерминации;
2
Rˆ adj
(k ) –
скорректированная
на
величину
смещения оценка этого коэффициента детерминации, определяемая по
формуле:
k 1
2
Rˆ adj
(k ) 1 (1 Rˆ 2 )
;
n k 1
Rˆ
2
(k )
– среднеквадратическое отклонение оценки Rˆ 2 ( k ) :
210
Rˆ
2
(k )
DRˆ 2 ( k )
2k ( n k 1)
(1 Rˆ 2 ( k )) .
( n 1)( n 2 1)
Далее, в качестве оптимального числа предикторов предлагается выбрать
2
( k ) достигает своего максимума.
такое k, при котором величина Rˆ min
2) Пошаговый отбор переменных.
Пошаговый отбор переменных является модификацией метода «всех
возможных регрессий» и отличается от него тем, что на каждом следующем
шаге учитываются результаты предыдущего: на k-м перебираются не все
возможные
сочетания
предикторов,
а
комбинации
k–1
наиболее
информативных предикторов предыдущего шага с оставшимися (m–k+1)
объясняющими переменными.
В большинстве ситуаций получаемые с помощью пошаговой процедуры
наборы переменных оказываются оптимальными или близкими к оптимальным.
Другой подход к обоснованию состава и размерности решаемой задачи
построения ЛММР с целью минимизации эффекта мультиколлинеарности
состоит в исключении из модели одной или нескольких коррелированных
переменных. Ясно, что основанием для исключения может служить высокое
значение парного коэффициента корреляции в матрице коэффициентов
корреляции
экзогенных
эффективности
является
переменных
модели
соответствующее
(31.а).
изменение
Критерием
его
множественного
коэффициента корреляции (34), а также соответствующих коэффициентов
парной корреляции в векторе корреляции эндогенной и экзогенных переменных
модели (31.б). Однако при такого рода «очистке» данных следует помнить о
возможности
существенного
искажения
содержательного
смысла
эконометрической модели и пытаться избежать его.
Следует также заметить, что некоторый положительный эффект на
снижение мультиколлинеарности может оказывать расширение объемов
выборки, изменение спецификации модели в части изменения ее формы,
добавления значимого фактора в число объясняющих переменных, а также
специальные методы преобразования исходных данных модели [14].
211
2.4.3.6. Обнаружение гетероскедастичности остатков модели
Рассмотрим график разброса остатков, полученных путем очистки
некоторого
исходного
статистического
ряда
от
модельных
значений,
представленных на рисунке 7. Очевидно, остатки не имеют постоянной
дисперсии: вариация остатков растет с увеличением Ŷi. Это значит, что
нарушена одна из предпосылок применения МНК («дисперсия случайной
составляющей конечна и постоянна») и свидетельствует о наличии т.н.
гетероскедастичности в остатках, что собственно означает неоднородность по
характеристике
случайного
разброса.
Применение
МНК
в
случае
гетероскедастичности в остатках не позволяет получить состоятельные оценки
параметров;
полученные
оценки
также
не
являются
эффективными;
гетероскедастичность приводит иногда к смещенности оценок регрессионных
коэффициентов. Т.е. если распределение случайного члена не является
гомоскедастичным, то расчет стандартных ошибок параметров по приведенным
выше формулам будет неточен. ([23], c. 203).
Пример проявления тенденции в остатках модели
Y = 6.15354·X 1 + 1.68365·X 2 + 0.94388·X 4 + 0.51796·X 5 + 3.11956·X 6 – 0.0003636·X 2 ·X 5 + ε
εi
1000
800
600
400
200
Rank Y ^ i
0
-200
0
10
20
30
40
50
60
70
80
90
100
-400
-600
Рис.7.
Для обнаружения гетероскедастичности, помимо анализа наглядного
представления, рекомендуется использовать специальные аналитические тесты.
Наиболее часто используются три из них:
212
•
тест ранговой корреляции Спирмэна;
•
тест Голдфелда-Квандта;
•
тест Глейзера и др.
В основе этих критериев лежат различные предположения о зависимости
между дисперсией случайного члена и величиной объясняющих переменных
([23], c. 204-208).
Тест ранговой корреляции Спирмэна
Тест ранговой корреляции Спирмэна основан на предположении, что
дисперсия случайного члена будет либо увеличиваться, либо уменьшаться по
мере увеличения объясняющей переменной, и поэтому в регрессии, параметры
которой оцениваются МНК абсолютные величины остатков и значения
объясняющей переменной будут коррелированы.
Реализация данного теста предполагает, что данные по Хi (i – индекс
любого включенного в модель фактора) и по абсолютным значениям остатков
ранжируются (в порядке возрастания); коэффициент ранговой корреляции
определяется по формуле:
r ( X i , | e |) 1
6 Dk2
k
n(n 2 1)
,
где Dk – разность между рангом переменной Хi и рангом абсолютного значения
остаточного члена соответствующего наблюдения |e|.
В предположении справедливости гипотезы Н0: r(Xi, |e|) = 0 статистика
r(Xi, |e|) n 1 подчиняется нормальному закону распределения.
Тест Голдфелда-Квандта
Тест
Голдфелда-Квандта
основан
на
предположении,
что
среднеквадратическое отклонение распределения вероятностей случайной
составляющей в каждом наблюдении пропорционально значению объясняющей
переменной в этом наблюдении. Предполагается также, что случайная
составляющая распределена нормально и не подвержена автокорреляции.
213
Реализация данного теста предполагает, что все множество наблюдений
упорядочивается по возрастанию величины объясняющей переменной (если
переменных несколько, то наблюдения упорядочиваются по той из них,
которая, как предполагается, связана со среднеквадратическим отклонением
случайной составляющей). Из данной совокупности исключается часть
срединных данных (например, от 1/4 до 1/6 объема выборки), при этом
половина исключаемых наблюдений должна превышать число оцениваемых
параметров в модели. По каждой выборке из n1 и n2 наблюдений
(соответственно с малыми и большими значениями объясняющей переменной)
оценивается регрессия. Если гипотеза о том, что в остатках присутствует
гетероскедастичность, верна, то остаточная дисперсия во второй выборке будет
существенно больше, чем в первой. Статистика:
n
Q2
F = Q
1
p
(y
i n n2 1
n1
(y
i 1
i
i
yˆ i ) 2
yˆ i ) 2
(здесь i – номер наблюдения в упорядоченной совокупности данных; Q1 и Q2 –
суммы квадратов отклонений в регрессиях для первой и второй выборки
соответственно) в предположении справедливости гипотезы Н0: 12 22 имеет
F-распределение Фишера с (n2–k) степенями свободы для числителя и (n1–k)
степенями свободы для знаменателя (k – число оцениваемых параметров
модели). При альтернативной гипотезе Н1: 12 22 , значение статистики
сравнивается с табличным значением F-критерия Фишера Fкрα(n2–k; n1–k).
Тест Глейзера
Тест
Глейзера
([3,
14,
23,]
основан
на
предположении,
что
среднеквадратическое отклонение распределения вероятностей случайной
составляющей в каждом наблюдении связано некоторой функциональной
214
зависимостью со значением объясняющей переменной в этом наблюдении. Т.е.
имеет место, следующее соотношение: i 0 1 x i .
Данный подход рассматривает регрессию абсолютных величин остатков
|e| по некоторой функции от переменной Хi (Хi – это та объясняющая
переменная, от которой гипотетически зависит дисперсия остатков). Регрессия
|e| может строиться не по одной объясняющей переменной, а по нескольким,
или по определенной комбинации объясняющих переменных. На практике
рассматриваются простые функции от Х.
Решение о гетероскедастичности принимается на основе проверки
регрессионных коэффициентов на их статистически значимое отличие от нуля.
Обобщенная линейная модель множественной регрессии
В
ситуации
некоррелированности
необходимости
и
отказа
гомоскедастичности
от
условий
случайной
взаимной
составляющей
линейной модели множественной регрессии, выражаемых соотношением:
cov( ) 2 E n ,
на практике возможно использование т.н. обобщенной линейной модели
множественной регрессии (ОЛММР).
Обобщенная линейная модель множественной регрессии задается
уравнением:
Y = Xа’ + ε
со следующими ограничениями:
1) Mε = 0;
2) cov(ε) = σ2Ω,
где Ω – симметричная положительно определенная матрица размерностью n n;
3) (X1, X2, …, Xm) –детерминированные переменные;
4) rangX = m + 1 < n.
Не трудно доказать, что в условиях обобщенной линейной модели
регрессии, оценивание параметров с использованием обычного метода
наименьших квадратов дает состоятельные и несмещенные оценки, которые,
215
однако, не обладают свойством эффективности. В этом случае используется
обобщенный метод наименьших квадратов (ОМНК).
Оценки
регрессионных
коэффициентов
по
обобщенному
МНК
определяются по формуле:
a ( 1 ) 1 1Y
и являются по построению результатом минимизации критерия:
Q(â’) = (Y – Xâ’)TΩ–1(Y – Xâ’) = eTΩ–1e.
ОМНК-оценки
параметров
ОЛММР
являются
состоятельными,
несмещенными и эффективными в классе всех линейных относительно Y
несмещенных оценок.
При
этом
ковариационная
матрица
оценок
параметров
ОЛММР
рассчитывается по формуле:
cov(â’) =σ2(XTΩ–1X)–1.
Выборочный коэффициент детерминации в условиях ОЛММР:
Rˆ 2 1
e 1e
.
(Y Y ) 1 (Y Y )
Оценка
s2
n
1
ˆ 2
e 1e
n m 1
n m 1
является несмещенной оценкой параметра σ2 ОЛММР.
Случайная величина (n–m–1)s2/σ2 подчиняется χ2-распределению с (n–m–
1) степенями свободы. Оценки â’ и s2 статистически независимы.
2.4.3.7. Автокорреляция остатков
Нарушение свойства взаимной некоррелированности остатков регрессии
в
значительной
мере
снижает
информационные
и
предсказательные
характеристики ЛММР. В этой связи чрезвычайно важной представляется
задача обнаружения факта невыполнения соответствующего требования
Гаусса-Маркова и его последующая нивелировка.
216
Частично
данная
проблема
рассматривалась
применительно
к
исследованию свойств и характеристик временных рядов [см. п.2.3.5]. Далее
остановимся на других методах идентификации, применимых к анализу
остатков регрессионной модели.
Исследование автокорреляции (последовательная корреляция) остатков
является
одним
полученной
из
наиболее
модели
прогноза.
информативных
При
тестирований
корректной
спецификации
качества
модели
автокорреляция должна быть небольшой, а в идеале должна отсутствовать.
Величину
автокорреляции
можно,
например,
оценить
при
помощи
коэффициента автокорреляции первого порядка, который обозначим Ra. (Это
обычный коэффициент корреляции между двумя переменными: для первой t-е
наблюдение есть dt, а для второй - dt-1.. Cдвиг на одно наблюдение и отражен в
названии коэффициента).
По определению имеем:
N
Ra
d
t 2
N
t
dt 1
,
N
d d
2
t 2
t
t 2
(37)
2
t 1
где d t y t y t , t .
При большом числе наблюдений можно воспользоваться очевидным
приближением формулы (37), а именно:
N
Ra
d
t 2
t
dt 1
.
N
d
t 2
2
t
При отсутствии автокорреляции Ra=0, при полной положительной
автокорреляции Ra=1, при полной отрицательной автокорреляции Ra= -1.
Обычно Ra принимает некоторое промежуточное значение между -1 и 1,
интерпретировать который исследователь может в соответствии со своими
представлениями. При обнаружении значительной автокорреляции следует
уточнить спецификацию модели. Видимо, из числа независимых выпала какая-
217
то существенная переменная или принят неправильный вид функции f(x). При
построении
множественной
регрессии
в случае
обнаружения
сильной
автокорреляции обычно рекомендуется включить в число независимых
переменных время.
Другим способом оценки автокорреляции служит критерий ДарбинаУотсона. Соответствующая статистика, обозначаемая DW, имеет вид:
N
DW
(d
t 2
d t 1 ) 2
t
.
N
d
t 2
(38).
2
t
Проведем преобразование формулы (38), учитывая, что поскольку
N
N
t 2
t 2
d t 12 d t 2 d N2 d12 ,
при большом количестве наблюдений N имеем:
N
N
t 2
t 2
d t 12 d t 2 .
Итак, получаем:
N
DW
N
2 dt 2 d t d t 1
2
t 2
t 2
N
d
t 2
2(1 Rа ).
2
t
Учитывая возможные значения Ra, можно сделать вывод о том, что, вопервых, DW [0;4]. Во-вторых, при отсутствии автокорреляции DW=2, при
полной положительной автокорреляции DW=0, а при полной отрицательной
DW=4.
Для
статистики
DW
существуют
таблицы
критических
границ,
позволяющих принять или отвергнуть гипотезу об отсутствии автокорреляции
в ряду остатков [54]. Для заданного уровня значимости (q%), для числа
наблюдений N и числа независимых переменных m приводятся два числа: dL и
dU.
Итак,
если
DW<dL,
автокорреляции остатков;
принимается
гипотеза
о
положительной
218
если dU<DW<4-dU, принимается гипотеза об отсутствии автокорреляции
остатков;
если DW>4-dL, принимается гипотеза об отрицательной автокорреляции
остатков;
если dL<DW<dU или 4-dU<DW<4-dL, то не существует статистических
оснований принять или отвергнуть гипотезу об отсутствии автокорреляции.
2.4.3.8. Специальные приемы коррекции множественных
регрессионных моделей
Недостаточно высокие значения показателей R2 и F-статистики, могут
ставить перед исследователем проблему поиска более удачной формы
оцениваемой модели. В качестве одного из подходов к решению этой проблемы
может быть тестирование исходного ряда на обнаружение в нем подмножеств
с более однородными статистическими характеристиками, нежели исходное
множество данных. В этих целях весьма полезным может оказаться
использование теста Чоу. При этом его выводы очень важны при принятии
решений относительно возможности объединения нескольких подвыборок в
одну.
Суть теста состоит в следующем. Предположим, стоит вопрос, следует ли
объединять две подвыборки для оценивания общей регрессии или оценить
каждую регрессию в отдельности.
Оцениваются три модели регрессии: по общей выборке, а также по
каждой из подвыборок. По каждой модели регрессии оцениваются суммы
квадратов остатков, которые обозначаются соответственно: Qcom, Q1 и Q2
(причем Q1 + Q2 = Q). Проверяется гипотеза о равенстве сумм квадратов
остатков для двух подвыборок, полученных при построении общей модели
регрессии и моделей регрессии для каждой из подвыборок:
Н0: Qcom = Q.
219
Это равенство будет иметь место при совпадении коэффициентов
регрессии для объединенной регрессии и регрессии подвыборок, и будет
означать нецелесообразность выделения подвыборок. В общем случае качество
уравнения будет улучшаться: Qcom > Q. Для проверки гипотезы рассчитывается
статистика:
Fp =
(Qcom Q) v1
,
Q v2
где v1 и v2 – соответствующие числа степеней свободы.
Эта
статистика
в
предположении
справедливости
гипотезы
H0
распределена по закону распределения Фишера с v1 степенями свободы для
числителя и v2 степенями свободы для знаменателя на заданном уровне
значимости α.
Значение
статистики
сравнивается
с
табличным
значением
F-
распределения Фишера Fкрα(v1, v2). Если Fp > Fкрα, то это означает, что
уменьшение необъясненной вариации (с учетом степеней свободы) при
разделении выборки для построения регрессии, превышает оставшуюся при
этом необъясненной вариацию (с учетом степеней свободы), и указывает на
нецелесообразность объединения подвыборок. Таким образом, возможно
ответить на вопрос о целесообразности либо не построения единой модели
либо двух различных.
Дополнительной возможностью исследования исходных выборок с
неоднородными характеристиками является использование так называемых
фиктивных переменных или как их еще именуют пременных-манекенов. С их
помощью строятся т.н. модели с переменной структурой. Изменчивость
структуры как раз и является отражением факта разнородности поведения
объясняемых переменных в зависимости от объясняющих факторов при
некоторых специальных условиях.
Можно привести следующий пример. Допустим, исследователь хочет
оценить параметры функции спроса на сельхоз продукцию в зависимости от
среднедушевого дохода населения за некоторый период времени. Не трудно
220
догадаться, что имело бы смысл построить не одну регрессионную модель, а
две. Первая для городских жителей, а вторая для потребителей, проживающих в
сельской местности. Однако удовлетворительно решить проблему создания
модели можно и в рамках единой конструкции, введя в состав объясняющих
переменных специальную переменную, учитывающую место проживания
потребителя. Например, значение переменной равно 0 для жителей города и 1
для проживающих вне его.
Этот же прием часто используется для вычленения и идентификации
сезонных факторов в моделях. Решение этой проблемы необходимо с целью:
- устранения сезонных возмущений в квартальных или
месячных
временных рядах;
- поведения
оценивания
эконометрических
соотношений
между
переменными, среди которых имеются как скорректированные, так и
подверженные влиянию сезонных воздействий.
Допустим, мы предполагаем наличие фактора сезонности, например
поквартальной,
воздействующего
наряду
с
другими
на
некоторую
e
e
переменную Y. Пусть y - ряд остатков модели, при этом y = (yij), где yij -–
значение величины Y в j-м квартале i-го года i 1, n ; j 1, 4. .
Попытаемся выявить факт присутствия квартальной сезонности в
статистике, собранной за достаточно продолжительный ряд лет.
Модель,
которую
нам
следует
оценить,
имеет
следующий
вид
y e Hb t , где b – параметры модели, t - случайная составляющая модели;
H – матрица экзогенных переменных-манекенов следующей структуры
221
H 4n4
1
0
0
0
1
0
0
.
0
0 0 0
1 0 0
0 1 0
0 0 1
0 0 0
1 0 0
0 1 0
. . .
0 0 1
Понятно, что оценку параметров следует проводить в соответствии с
формулой (13), т.е. b ( H T H )1 H T y e . Отсюда, из свойств матрицы H легко
получаем значения параметров b, а именно
1
n
1
n
b
1n
1n
i 1
n
y
i2
i 1
n
.
yi3
i 1
n
yi 4
i 1
n
y
i1
Очевидно, что смысл соответствующего параметра b не что иное, как
среднеквартальное значение изучаемого признака y за соответствующий период
времени (очищенный от влияния совокупности других факторов).
2.5. Эконометрические модели и их оценивание
Рассмотренные ранее статистические модели представляли собой
регрессии одной зависимой переменной у от одной или нескольких
независимых (объясняющих) x1, ... хm переменных. При этом прогнозные
значения независимых переменных определялись вне модели. На основе этих
прогнозов по уравнению регрессии вычислялся точечный прогноз значения
зависимых переменных.
222
Однако в практике социально-экономического прогнозирования не редко
возникает необходимость применения более сложных моделей, в которых
рассматривается несколько переменных, значения которых невозможно
спрогнозировать вне модели и независимо друг от друга. Аналог прежних
независимых переменных имеет здесь название эндогенных. В число
объясняющих факторов для данной эндогенной переменной входят как
экзогенные, так и другие эндогенные переменные. Поведение каждой
эндогенной переменной соответственно описывается одним уравнение, где она
выступает в качестве зависимой. Система таких уравнений называется
эконометрической моделью. Помимо регрессий в нее могут входить
выражения, описывающие тренды отдельных переменных, и тождества,
связывающие некоторые переменные. Однако при описании метода оценки
параметров эконометрической модели мы не будем специально учитывать эти
дополнения.
Эконометрические
модели
представляют
собой
результат
статистического оценивания параметров системы математических выражений,
которые характеризуют некоторую экономическую концепцию о взаимосвязи
явлений.
Итак, все участвующие в модели переменные подразделяются на
экзогенные и эндогенные переменные.
Экзогенные переменные – это переменные, задаваемые автономно, в
определенной степени управляемые.
Эндогенные – это такие переменные, значения которых определяются в
процессе и внутри функционирования системы под воздействием экзогенных и
во взаимодействии друг с другом, В эконометрической модели они являются
предметом рассмотрения и объяснения.
Существуют также предопределенные переменные, которые выступают в
роли объясняющих переменных. Предопределенные переменные формируются
из всех экзогенных переменных и лаговых эндогенных переменных, то есть
таких переменных, значения которых входят в уравнения эконометрической
223
системы измеренными в прошлые моменты времени, и, следовательно,
являются уже известными.
Исходя из этого, можно сказать, что эконометрическая модель
используется для объяснения поведения эндогенных переменных в зависимости
от значений экзогенных и лаговых эндогенных переменных.
Обычно все предопределенные переменные, то есть экзогенные и лаговые
эндогенные, обозначаются Х, а эндогенные переменные – Y.
Таким образом, под собственно эконометрической моделью понимается
система зависимостей, часть из которой носит статистический характер
(поведенческих соотношений) и записывается в виде функциональных
зависимостей со случайной компонентой, в т.ч. трендовых, авторегрессионных,
лаговых. Другая часть представляет собой систему тождеств или балансовых
соотношений.
Общий вид функциональных соотношений эконометрической модели, ее
обязательная составляющая, может быть представлен следующим образом:
y1 f1 y2 ,..., yn , x1 ,..., xm 1 ;
y2 f 2 y1 ,..., yn , x1 ,..., xm 2 ;
...
yn f n y1 ,..., yn 1 , x1 ,..., xm n ,
где
yi , i 1, n - эндогенная переменная;
x j , j 1, m - экзогенная переменная.
Обозначим эндогенные переменные
yi , i 1, n . Для i-й эндогенной
переменной регрессионное уравнение имеет вид:
yi
k Ki
ik
y k il x l ui , i ,
k Ki
(1)
где Ki - подмножество эндогенных переменных;
Li - подмножество экзогенных переменных, объясняющих yi;
IK , IL коэффициенты регрессии;
224
ui - случайное возмущение.
Подмножества Ki и Li введены потому, что структура уравнений
регрессий определяется представлениями исследователя о виде связей
переменных, поэтому не все переменные включаются в число объясняющих.
Понятно, что i Kи.
В общем случае эконометрическая модель это система одновременных
уравнений, т.е. набор взаимосвязанных регрессионных моделей, в которых
одни и те же переменные в различных уравнениях системы могут
одновременно
играть
роль
и
результирующих
показателей,
то
есть
объясняемых переменных, и объясняющих переменных [1].
Строго говоря, применить непосредственно МНК к уравнению (1) не
совсем корректно, так как содержащиеся в уравнении эндогенные переменные
коррелированны с отклонениями ui и оценки будут смещены. Но в двух
частных случаях применить МНК можно. Во-первых, когда в правых частях
уравнений
нет
эндогенных
переменных,
т.е. система
уже
разрешена
относительно эндогенных переменных.
Во-вторых, когда система рекурсивна, т.е. зависимая переменная
предшествующего уравнения рассматривается в качестве объясняющего
фактора в последующих уравнениях:
y1 xl1l u1;
l L1
y2 y1 21 xl 2l u2 ;
l L 2
...
y2 yk nk xl nl un .
k K n
l L n
(2).
В системе (2) сначала оценивается первое уравнение. Затем во второе
уравнение подставляют вычисленные по первому оценки y1 и оценивают второе
уравнение и т.д.
225
Вернемся к общему случаю. В уравнении (1) переменные yi и yk , k Ki
относятся к одному наблюдению (если наблюдения проводятся в разные
моменты времени - к одному моменту). Любые переменные yJ, j, относящиеся
к предыдущим наблюдениям (моментам времени), считаются экзогенными.
Рассмотрим с помощью простого примера последствия применения МНК
для оценивания параметров системы одновременных уравнений.
Пример 1. Пусть задана система из двух уравнений, двух эндогенных
переменных и трех экзогенных. Она задана в произвольном виде, в общем
случае, отвечающем требованию (1). Ее называют структурной формой
y1 1 y 2 1 x1 1 ;
y 2 2 y1 2 x2 3 x3 2 .
Сделаем подстановку, выразив y1 через y2 , имеем следующий результат:
y 2 2 ( 1 y 2 1 x1 ) 2 x 2 3 x3 2 ;
y2
1
1 1 2
2 1 x1 2 2 x2 3 x3 2 .
Таким образом, получим y 2 2 y1 2 x2 3 x3 , где
1
2 1
2 1 2
2
3
; 2
; 3
;
.
1 1 2
1 1 2
1 1 2
1 1 2
Очевидно,
что
нам
удалось
выразить
выбранную
эндогенную
переменную через всю совокупность экзогенных факторов модели. Такое
преобразование
носит
название
перехода
к
приведенной
форме
эконометрической модели.
Аналогичным образом можно получить выражение для y2 , включающее в
себя три параметра - 4 ; 5 ; 6 . В итоге имеем так называемую приведенную
форму
исходной
эконометрической
модели.
Параметры
каждой
из
зависимостей приведенной формы могут быть оценены с помощью МНК. Т.е. с
помощью МНК могли бы получить оценки 6 параметров модели i . Затем,
имея 5 исходных параметров, следует найти их численные значения. Так же
226
очевидно, что однозначно в рамках заданной системы не возможно
идентифицировать и .
Ясно, что точность идентификации это отдельная проблема. При этом
трудности
возникают
как
в
случае
неидентифицируемости,
так
и
сверхидентифицируемости системы.
Выход из положения, например, во втором случае: дополнительные
ограничения на параметры структурной формы.
Кроме
того,
обратим
внимание
на
выражение
для
случайной
формы.
Таким
составляющей приведённой формы :
- сюда включены случайные 1 и 2 ;
- оно
включает
параметры
исходной
прослеживается зависимость эндогенных переменных и
образом,
.
В этой связи нетрудно убедиться в том, что:
- случайные
составляющие
не
являются
независимыми
(они
коррелированны);
- проявляется
взаимосвязь
векторами
наблюдений
(мультиколлинеарность).
Всё это приводит к смещённости оценок при идентификации структурной
формы с помощью простого МНК. Следовательно, МНК для оценки
параметров эконометрической модели можно использовать лишь в двух
случаях:
когда y зависит только от x , т.е. имеем чистую приведённую форму
эконометрической модели.
когда система рекурсивна.
В случае, когда система точно идентифицируется, параметры модели
возможно оценить с помощью т.н. косвенного МНК. Использование данного
метода предполагает два этапа вычислений.
На первом этапе структурная форма преобразовывается в приведённую
(регрессию каждой эндогенной переменной на все экзогенные). Параметры
приведенной формы оцениваются с помощью МНК.
227
На втором этапе полученные оценки приведённой формы обратным
переходом трансформируются в параметры структурной формы.
Приведем следующий пример.
Пример 2.
Дана структурная форма эконометрической модели:
y1 12 y 2 11 x1 1 ;
y 2 21 y1 22 x 2 2 .
Очевидно, что система точно идентифицируется.
Приведённая форма имеет следующий вид:
y1 11 x1 12 x 2 1 ;
y 2 21 x1 22 x 2 2 .
Размерность данной задачи делает возможным в условиях выполнения
обычных
предположений
параметров
Гаусса-Маркова однозначно провести
эконометрической
модели.
Во
многих
других
оценку
ситуациях
исследователи сталкиваются с т.н. проблемами идентификации.
Уравнение структурной формы эконометрической модели называется
точно идентифицируемым, если все участвующие в нем неизвестные (т. е.
априори не заданные) коэффициенты однозначно восстанавливаются по
коэффициентам приведенной формы без каких-либо ограничений на значения
последних.
Эконометрическая модель называется точно идентифицируемой, если все
уравнения ее структурной формы являются точно идентифицируемыми.
Уравнение структурной формы называется сверхидентифицируемым,
если все участвующие в нем неизвестные коэффициенты восстанавливаются по
коэффициентам приведенной формы, причем некоторые из его коэффициентов
могут принимать одновременно несколько (более одного) числовых значений,
соответствующих одной и той же приведенной форме.
Уравнение структурной формы называется неидентифицируемым, если
хотя бы один из участвующих в нем неизвестных коэффициентов не может
быть восстановлен по коэффициентам приведенной формы. Соответственно,
228
модель неидентифицируема, если хотя бы одно из уравнений ее структурной
формы является неидентифицируемым [3].
Анализ
проблем
возможности
идентифицируемости
конкретных
структурных параметров системы приводит к одной из трех принципиально
возможных ситуаций:
1) этот параметр может быть однозначно выражен через коэффициенты
приведенной системы;
2) структурный параметр допускает несколько разных вариантов
определения с помощью косвенного МНК;
3) структурный параметр не может быть выражен через параметры
приведенной формы.
Идентифицируемость или неидентифицируемость системы, ее уравнений
и параметров зависят только от внутренней структуры модели (числа
уравнений,
переменных
соотношения
в
системе
мультиколлинеарности
количеств
и
в
эндогенных
каждом
и
уравнении,
предопределенных
наличию
у анализируемых переменных, свойства
эффекта
матриц
структурных коэффициентов), но никак не связаны со статистическими
свойствами исходных наблюдений, например с их количеством.
Итак, для того, чтобы оценить параметры системы одновременных
уравнений следует проверить условия идентифицируемости систем. Введем
следующие обозначения:
BYt CX t t ; t 1, n , где
(3)
Bm my - матрица оцениваемых коэффициентов эндогенных переменных;
C m mx - матрица оцениваемых коэффициентов предопределённых переменных
(экзогенных, лаговых).
Сформулируем условия идентифицируемости :
1. Число
уравнений
системы
(3)
должно
быть
равно
числу
анализируемых эндогенных переменных; матрица Bmm должна быть
y
невырожденной (необходимое условие).
229
2. Матрица наблюдений предопределенных X nm должна иметь полный
x
ранг mx , при этом очевидно, что n my mx (необходимое условие).
3. Среди исключающих априорных ограничений не должно быть
одинаковых (необходимое условие).
4. Число исключённых из i-го уравнения системы предопределённых
переменных должно быть не меньше числа включённых переменных,
уменьшенного на 1 (необходимое условие).
ˆ x (i ) mi 1 (необходимое и достаточное условие).
5. Ранг матрицы
В
других
ситуациях
(система
неидентифицируема
либо
сверхидентифицируема) используют другие методы, позволяющие снизить
смещённость
оценок.
Например,
2МНК,
3МНК,
метод
наименьшего
дисперсионного отношения и др. Наиболее распространен в практике
эконометрического оценивания 2МНК.
Для оценки параметров эконометрической модели в общем случае
применяется так называемый двухшаговый метод наименьших квадратов
(2 МНК). Суть и содержание его заключается в следующем.
Работа начинается с общей формализации изучаемого процесса в виде
общей структурной формы эконометрической модели. Далее осуществляют
следующие действия.
1. Проверяются условия идентифицируемости модели и при необходимости
вносятся корректировки в ее структуру.
2. Записывается приведенная форма модели (1). Ее параметры оценивают с
помощью МНК. Далее на полученной модели проводится оценка
текущих значений эндогенных переменных задачи.
3. С помощью МНК осуществляют оценку коэффициентов структурной
формы модели, подставляя в качестве объясняющих переменных их
прогнозные значения, полученные на предшествующем шаге, т.е. при
первом использовании МНК.
230
Можно показать [3], что в результате такой замены фактических
значений прогнозируемыми оценками, результирующие переменные являются,
по крайней мере, асимптотически не коррелированны с возмущениями.
Для приведенного выше примера 1 процедура двухшагового оценивания
будет выглядеть следующим образом:
1 шаг. Строим
приведённую
форму
модели
(регрессию
каждой
эндогенной переменной на все экзогенные):
y1 11 x1 21 x 2 31 x3 1 ;
y 2 12 x1 22 x 2 32 x3 2 .
С помощью МНК получаем регрессионные значения y : yˆ1; yˆ 2 .
2 шаг. Используем для оценки параметров и
y1
структурную исходную
форму, а также значения y1 и y2 , полученные на первом шаге:
y1 1 yˆ 2 1 x1 ;
y 2 2 yˆ 1 2 x 2 3 x 3 .
Заметим, что если в структурной исходной форме нет констант, то на
первом шаге их не используем. Если хотя бы в одном уравнении структурной
формы они присутствуют, то идентификацию констант проводят по всем
уравнениям приведённой формы.
Для вывода аналитических формул для параметров эконометрической
модели введем следующие обозначения [25]. Обозначим через Yi и X i те
столбцы, которые входят в соответствующее уравнение для
yi
и
xi
соответственно.
Например, если имеем следующие массивы исходных статистических
наблюдений:
x11
x i1
x 1m x
X:
x it
x
n
mx
n
1
x
x
xi
n
i
y11
y i1
y 1m y
Y:
y it
y
n
1
y
n
i
yi
y mn y
,
231
то
непосредственно
идентификации
параметров
уравнения
y 2 1 y1 2 y 2 7 y 7 2 x 2 5 x5 2 соответственно получим:
x11
X:
n
1
x
x12 x51 x1m x
x2t x5t
n
2
n
5
n
mx
x x
x
x2
x5
X2
y11
Y : y1t
n
1
y
y1
y12 y71 y1m y
y2t y7t
y
n
2
1
7
y ymn y
y2
y7
Y2
Для формализованного описания математического анализа 2 МНК введем
следующие обозначения:
y11 ... y1n
Y ... ... ... ;
y
n1 ... ynn
x11 ... x1n
X ... ... ... ,
x
n1 ... xnn
где Y и Х - матрицы наблюдений над эндогенными и экзогенными
наблюдениями соответственно; n - число наблюдений.
Для i-й эндогенной переменной в соответствии с множествами Ki и Li
составим подматрицы Yi и Xi; они составлены из столбцов матриц Y и X,
соответствующих эндогенным и экзогенным переменным, принадлежащим
множествам Ki и Li.
Пусть мощности множеств Ki и Li - соответственно ni и mi. Тогда
размерность матрицы Ki - n на ni, а матрицы Li - n на mi. Пусть i и i - векторы
коэффициентов регрессии при эндогенных и экзогенных переменных,
входящих в i-е уравнение (их размерности ni и mi соответственно); ui - вектор
случайных возмущений. Обозначим вектор наблюдений над i-й эндогенной
переменной через yi. Тогда для исходной совокупности наблюдений над этой
переменной можем записать следующее векторное уравнение:
yi Yi i X i i ui , i.
(3)
На первом шаге метода запишем уравнение регрессии i-й эндогенной
переменной на все экзогенные:
yi X i i ,
(4)
232
где i - соответствующий вектор оценок коэффициентов множественной
регрессии размерности m;
i - вектор случайных отклонений размерности n.
Тогда общая система уравнений приведенной формы эконометрической модели
в векторном виде имеет следующий вид:
Y=XП+V,
(5),
где
11 ... 1n
V ... ... ... .
n1 ... nn
11 ... 1n
... ... ... ;
m1 ... mn
В соответствии со сделанными ранее замечаниями для эндогенных
переменных, принадлежащих множеству Ki, часть системы (5) выглядит
следующем образом:
Yi=XПi+Vi,
где матрицы Пi, Vi состоят из тех же столбцов матриц П и V соответственно, что
и Yi. Подставив последнее выражение в формулу (3), получим:
y i X i i X i i (ui ,Vi i )i.
В
скобках
стоит
общее
выражение
(6)
для
случайного
отклонения
соответствующего уравнения.
Так как матрица П неизвестна, то на первом шаге, применяя МНК к
уравнениям (4), получаем оценки по формуле (13):
i ( X T X ) 1 X T yi , i
или в общем матричном представлении
( X T X ) 1 X T Y , i .
i
i
На основе полученных оценок П возможно произвести текущую оценку
матриц экзогенных переменных и случайных, т.е. Yi и Vi соответственно.
Таким образом, имеем:
ˆ ( X T X ) 1 X T Y ;
Yˆi X
i
i
Vˆi Yi Yˆi .
(7)
233
Оцененные значения подставляем в структурное уравнение (6), получим
следующее:
y i Yi i X i i (ui ,Vi i ), i.
(8)
Далее, на втором шаге метода применяем МНК к уравнениям (8), которые
целесообразно представить в следующем виде:
i
y i (Yi ; xi ) (ui ,Vi i ).
i
В соответствии с формулой (13) можем получить оценки параметров ai и
gi искомых векторов i и i :
1
T
Yi T
Yi T Yi
g i Yi
T
(
Y
;
X
)
y
T
i
i
T
a i X i i
X i Yi
X
i
1
T
Yi T X i Yi yi
.
X iT X i X iT yi
Выразим последнюю формулу через исходные обозначения. Используя
формулу (7) получим:
YˆiT Yˆi YiT X ( X T X ) 1 X T X ( X T X ) 1 X T Yi YiT X ( X T X ) 1 X T Yi ;
YˆiT X i YiT X ( X T X ) 1 X T X i YiT X i .
X iT Yˆi X iT X ( X T X ) 1 X T Yi X iT Yi .
Окончательно имеем:
g i Yi T X ( X T X ) 1 X T Yi
ai
X iT Yi
1
T
T
1
T
Yi T X i Yi X ( X X ) X yi
. (9)
X iT X i X iT yi
После получения оценок коэффициентов регрессии уравнений (1)
прогнозирование
на
основе
эконометрической
модели
осуществляют
следующим образом. Сначала вне модели осуществляют прогноз значений
экзогенных переменных. Затем эти прогнозные значения подставляют в
уравнения (1) и решают систему этих уравнений относительно эндогенных
переменных.
Следует заметить, что весь процесс спецификации и оценивания
эконометрических моделей весьма кропотлив и трудоемок. Он проводится в
рамках общих требований корректной идентификации отдельных уравнений
234
множественной регрессии, рассмотренных ранее (см. п.2.4.3.2), а также
дополнительных, связанных со спецификой идентификации систем
одновременных уравнений. Общая укрупненная схема исследований в
процессе построения эконометрической модели приведена на рис.8.
В
заключение
отметим
следующие
соображения
относительно
возможности использования 2МНК с целью идентификации эконометрических
моделей в форме систем одновременных уравнений.
1. На практике все методы оценивания эконометрических моделей дают
смещенность оценок.
2. В условиях малых выборок предпочтительность одного метода перед
другим может меняться при переходе от одной эконометрической модели
к другой. На практике часто лучшие статистические и прогностические
характеристики дает классический МНК. При этом следует также учесть
чисто вычислительные проблемы, связанные с 2МНК, особенно при
попытке оценки доверительных интервалов прогноза [].
При использовании 2МНК лаговые переменные автоматически относятся
к числу объясняющих факторов модели.
235
Анализ экономических показателей
Формулировка гипотез для построения модели
Разделение переменных на экзогенные и эндогенные
Математическое описание связей в модели
Проведение корреляционного анализа
Нет
Есть
Выявление наличия взаимосвязи между показателями
Нет
Выявление мультиколлинеарности
Есть
Устранение мультиколлинеарности
Проверка идентифицируемости системы
Использование методов оценивания параметров уравнений системы
с учетом результатов проверки идентифицируемости системы
Проведение дисперсионного анализа
Незначима
Значима
Проверка значимости модели в целом
Проверка значимости параметров
Значимы
Незначимы
Исключение незначимых параметров
Вычисление показателей, характеризующих точность
модели и ее прогностические способности
Оценка параметров
Сравнение полученной модели и выбор лучшей
Проверка наличия тенденций в экзогенных переменных
Построение трендовых моделей для экзогенных переменных
Осуществление точечного прогноза по выбранной модели
Построение доверительного интервала прогноза
Построение доверительного интервала параметров
Выделение остатков
Тестирование остатков
Вывод о целесообразности дальнейшего исследования
Рис.8. Общая схема исследований в процессе построения эконометрической
модели.
236
Л и те р а т у р а
1.
Айвазян С.А. и др. Прикладная статистика: Исследование зависимостей.
М.: Финансы и статистика, 1985.
2.
Айвазян С.А. и др. Прикладная статистика: Классификация и снижение
размерности. М.: Финансы и статистика, 1989.
3.
Айвазян С.А., Мхитарян В.С. Прикладная статистика и основы
эконометрики. М.: ЮНИТИ, 1998.
4.
Афанасьев
В.Н.,
Юзбашев
М.М.
Анализ
временных
рядов
и
прогнозирование: Учебник. - М.: Финансы и статистика, 2001.
5.
Бабешко Л.О. Коллакационные модели прогнозирования в финансовой
сфере. М.: Экзамен, 2001.
6.
Баркалов Н.Б. Производственные функции в моделях экономического
роста.-М.: Изд-во МГУ, 1981
7.
Басовский Л.Е. Прогнозирование и планирование в условиях рынка. М.:
Инфра-М, 2001.
8.
Бергстром А. Построение и применение экономических моделей. М.:
Прогресс, 1970.
9.
Бестужев-Лада И.В. Нормативное социологическое прогнозирование:
возможные пути реализации целей общества. М., "Наука", 1987.
10.
Бестужев-Лада
И.В.
Прогнозирование
обоснованных
социальных
нововведений. М., "Наука", 1993.
11.
Бокс Дж., Дженкинс Г. Анализ временных рядов: Прогноз и управление.
М., Мир, 1974.
12.
Большаков Н.М., Кузьбожаев Э.Н. Основы социально-экономического
прогнозирования. Сыктывкар. СЛИ, 1997.
13.
Бормотов М.Ю. и др. Статистические и опережающие методы
прогнозирования. М., Изд-во МАИ, 1988.
14.
Бородич С.А. Эконометрика: Учеб.пособие. – Мн.: Новое знание, 2001.
237
15.
Браун М. Теория и измерение технического прогресса. М.: Статистика,
1971.
16.
Винн Р., Холден К Введение в прикладной эконометрический анализ. М.:
Финансы и статистика. 1981.
17.
Владимирова Л.П. Прогнозирование и планирование в условиях рынка.
М.: Издательский Дом "Дашков и Ко", 2001.
18.
Гмошинский В.Г., Флиорент Г.И. Теоретические основы инженерного
прогнозирования. М., "Наука", 1973.
19.
Горелова Л.В., Мельникова Е.Н. Основы прогнозирования систем. М.:
Высшая школа. 1986.
20.
В.М. Гальперин, П.И. Гребенников, А.И. Леусский, Л.С. Тарасевич.
Макроэкономика.
Учебник.
Санкт-Петербург:
Издательство
Санкт-
Петербургского ГУЭФ, 1997.
21.
Дженкинс Г., Ватс Д. Спектральный анализ и его применения. М.: Мир,
1971, 1972. Вып. 1,2.
22.
Джонстон Дж. (1980) Эконометрические методы. М.: Статистика, 1980.
23.
Доугерти К. Введение в эконометрику М.: Инфра-М, 2001.
24.
Дуброва Т.А. Статистические методы прогнозирования: Учебное пособие
для вузов. М.: ЮНИТИ-ДАНА, 2003.
25.
Дудорин В.И. м др. Методы социально-экономического прогнозирования
(общие методы прогнозирования) /ГАУ. - М., 1991.
26.
Дудорин В.И. и др. Методы социально-экономического прогнозирования
(специальные методы прогнозирования) /ГАУ.- М., 1992.
27.
Замков О.О. Эконометрические методы в макроэкономическом анализе:
М.: ГУ ВШЭ, 2001.
28.
Капитоненко В.В., Писарева О.М. Модели рыночной экономики и
равновесия: Учебное пособие/ ГАУ. М., 1995.
29.
Ким Дж.-О. И др. Факторный, дискриминантный и кластерный анализ.
М.: Финансы и статистика. 1989.
238
30.
Кокс Д., Снелл Э. Прикладная статистика: Принципы и примеры. М.:
Мир. 1984.
31.
Колемаев В.А. и др. Теория вероятностей и математическая статистика.
М.: Высшая школа. 1991.
32.
Колемаев В.А., Калинина В.Н. Теория вероятностей и математическая
статистика. М.: Инфра-М, 1997.
33.
Комплексное
прогнозирование
в
экономике
и
международных
отношениях. Под ред. Четыркина Е.М. М.: АН СССР ИМЭМО, 1975.
34.
Лисичкин В.А. О достоверности прогнозов. М.: "Знание", 1979.
35.
Ксенофонтов М.Ю. Теоретические и прикладные аспекты социально-
экономического прогнозирования. М.: Издательство ИСЭПН, 2002.
36.
Лукашин Ю.П. Адаптивные методы краткосрочного прогнозирования.
М.: Статистика, 1979.
37.
Львовский Е.Н. Статистические методы построения эмпирических
формул. М.: Высшая школа. 1988.
38.
Магнус Я.Р. и др. Эконометрика. Начальный курс. М.: Дело, 1997.
39.
Магнус Я.Р., Катышев П.К., Пересецкий А.А. Эконометрика. Начальный
курс. М.: Дело, 2000.
40.
Мартино Д.Х. Технологическое прогнозирование. - М.: Прогресс, 1977.
41.
Маленво Э. Статистические методы эконометрии. М.: "Статистика", 1975.
42.
Меньшиков С.М., Клименко Л.А. Длинные волны в экономике. М.:
Международные отношения, 1989.
43.
Моргенштерн О. О точности экономико-статистических наблюдений. М.:
"Статистика", 1968
44.
Морозова Т.Г. и др. Прогнозирование и планирование в условиях рынка.
М.: ЮНИТИ-ДАНА, 2000.
45.
Мотышина М.С. Методы социально-экономического прогнозирования.
СПб., Изд-во СПбУЭФ, 1994.
46.
Основы экономического и социального прогнозирования. Под ред. В.Н.
Мосина, Д.М. Крука. - М.: Высш. школа, 1985.
239
47.
Парсаданов Г.А. Прогнозирование национальной экономики. М.: ЗАО
"Финстатинформ", 1999.
48.
Парсаданов
Г.А.
Прогнозирование
и
планирование
социально-
экономической системы страны (теоретико-методологические аспекты). М.:
ЮНИТИ, 2001.
49.
Петрович М.Л., Давидович М.И. Статистическое оценивание и проверка
гипотез на ЭВМ. М.: Финансы и статистика, 1989.
50.
Прогностика. Терминология. Под ред. Сифорова В.И. , М.: Наука, 1978.
51.
Пуарье Д. Эконометрия структурных изменений. М.: Финансы и
статистика, 1981.
52.
Рабочая книга по прогнозированию. Под ред. Бестужева-Лады И.В. , М.:
Мысль, 1982.
53.
Романенко И.В. Социальное и экономическое прогнозирование. СПб.:
Изд-во Михайлова В.А., 2000.
54.
Саркисян С.А. И др. Анализ и прогноз развития больших технических
систем. М.: Наука, 1983.
55.
Статистические
методы
анализа
информации
в
социологических
исследованиях. Под ред. Осипов Г.В. М.: "Наука", 1979.
56.
Статистический словарь/ Гл.ред. М.А.Королев. – М., Финансы и
статистика, 1989.
57.
Статистическое моделирование и прогнозирование. Под ред. Гранберга
А.Г. М.: Финансы и статистика. 1990.
58.
Теория прогнозирования и принятия решений. Под ред. Саркисяна С.А.
М.: Высшая школа, 1977.
59.
Теория и практика статистического моделирования. Под ред. Четыркина
Е.М., Класа А., Финансы и статистика, 1986.
60.
Тихомиров Н.П. И др. Принципы организации этапов прогнозирования и
оценки научно-технического уровня при управлении созданием больших
технических систем. М.: Изд-во РЭА им. Г.В.Плеханова, 1995.
240
61.
Уотшем Т.Дж., Паррамоу К. Количественные методы в финансах. М.:
ЮНИТИ, 1999.
62.
ФатхутдиновР.А. Управленческие решения. Учебник. М.: ИНФРА-М,
2001.
63.
Френкель А.А. Прогнозирование производительности труда: методы и
модели. М.: Экономика, 1989.
64.
Хьюбер Дж.П. Робастность в статистике. М., "Мир", 1984.
65.
Цыгичко В.Н. Прогнозирование социально-экономических процессов. М.:
Финансы и статистика. 1986.
66.
Чебраков Ю.В. и др. Современный анализ данных: достижения и неудачи.
СПб.: СПб ГТУ, 1998.
67.
Черныш Е.А. Прогнозирование и планирование в условиях рынка. М.:
ПРИОР, 1999.
68.
Четыркин
Е.М.
Статистические
методы
прогнозирования.
М.:
Статистика, 1975.
69.
Четыркин Е.М., Калихман И.Л. Вероятность и статистика. М.: Финансы и
статистика, 1982.
70.
Эконометрика. Под ред. Елисеевой И.И., М.: Финансы и статистика. 2001.
71.
Янч Э. Прогнозирование научно-технического прогресса. М.: "Прогресс",
1974.
72.
Федеральный закон "О государственном прогнозировании и программах
социально-экономического развития Российской Федерации" от 20 июля 1995
г. за N 115-ФЗ.
73.
Davidson R., J.G. MacKinnon Estimation and Inference in Econometrics,
Oxford University Press. 1993.
74.
Diebold, Francis X., Elements of forecasting in business, economics,
government, and finance. An International Thomson Publishing Company, 1998.
75.
Franses Ph. Time series models for business and economic forecasting.
Cambridge University Press, 1998.
241
76.
Fuller W.A. (1996) Introduction to Statistical Time Series, 2nd Ed, Wiley,
New York.
77.
Enders W. Applied Econometric Time Series, Wiley, New York, 1995.
78.
Hamilton, James D. Time Series Analysis, Princeton University Press,
Princeton, 1994.
79.
Hanke J., Wichern D., Reitsch A. Business forecasting. Princeton University
Press, Princeton, 2001.
80.
Hatanaka M. Time Series-Based Econometrics: Unit Roots and Cointegration,
Oxford University Press. 1996
81.
R.Carter Hill, William E. Griffiths, George G.Judge. Undergraduate
econometrics. John Wiley&Sons, 1998.
82.
Nash J., Nash M. Practical forecasting for managers. Oxford University Press.
2001.
83.
Pindyck R., Rubinfeld D. Econometric models and economic forecasts, The
Irwin/McGraw-Hill, 1997.
84.
Stephen
A.DeLurgio.
Irwin/McGraw-Hill, 1998.
Forecasting:
Principles
and
Applications.
The