МЕТОД ДЕКОМПОЗИЦИИ ГЕОМЕТРИЧЕСКИХ ОБРАЗОВ ЗАКОНОВ ФУНКЦИОНИРОВАНИЯ АВТОМАТОВ. Введение.
advertisement

МЕТОД ДЕКОМПОЗИЦИИ ГЕОМЕТРИЧЕСКИХ ОБРАЗОВ
ЗАКОНОВ ФУНКЦИОНИРОВАНИЯ АВТОМАТОВ.
В.А. Твердохлебов
Институт проблем точной механики и управления РАН,
Саратов, Россия
Введение.
Анализ свойств законов функционирования динамических систем
используется при решении задач синтеза, распознавания, управления и
др. В работах [1] и [2] (1995г. и 1996г.) была предложена, а в работах
[3-4] развита математическая форма задания законов функционирования дискретных детерминированных автоматов с конечным или бесконечным множеством состояний. Для этого инициальному автомату
A=(S,X,Y,,,s0), где S,X и Y – множества состояний, входных и выходных сигналов, s0S – начальное состояние, а и -функции переходов и выходов вида :SXS и :SXY сопоставлялись автоматные отображения 1 ( p ,( s0 , p )) и 2 ( p ,( s0 , p )), где
pX *
pX *
( s0 , p ) - последний выходной сигнал в последовательности сигналов
( s0 , p ) (X* - множество всех конечных последовательностей в алфавите
X).
После введение линейных порядков 1 на X* и 2 на Y* (Y) автоматные отображения преобразовались в графики, которые можно
изображать в системах координат с осью абсцисс (X* , 1) и осью ординат (Y*, 2) или (Y, 2). Наличие наименьших элементов по порядкам
1 и 2 позволяет заменить упорядоченные автоматные отображения
1
и
2 числовыми графиками
G1 ( r1 ( p ), r2 ( ( s0 , p ))),
G2
( r ( p ),r ( ( s
1
2
pX *
0
, p ))) , где ri(u) – номер элемента u по порядку i
pX *
, i{1,2}.
Представление законов функционирования автомата, числовыми
графиками G1 и G2 в декартовой системе координат на плоскости
позволяет:
1) задавать законы функционирования автомата уравнениями для
геометрических кривых, на которых расположены точки графиков G1 и
G2;
2) представлять свойства законов функционирования автомата на
основе их совмещения со свойствами геометрических кривых линий;
3) доопределять частично заданные законы функционирования автоматов с использованием классических методов интерполяции для
графиков G1 и G2 ;
4) представлять законы функционирования автоматов последовательностями вторых координат точек графиков G1 и G2 при предположении, что элемент ( s0 , p ) ( s0 , p ) имеет в последовательности номер r1(p).
На основании свойства 4 любая последовательность элементов из
конечного множества может рассматриваться как последовательность
вторых координат в графиках G1 и G2 при любом конечном множестве X . Это означает, что законы функционирования автоматов могут
задаваться не только числовыми графиками G1 и G2 , расположенными на геометрических кривых линиях, но и парами вида (, m), где
U* и U – произвольное конечное множество, а mN.
Для формального представления свойств последовательностей,
оценки сложности расположения элементов в последовательности,
сравнения по сложности последовательностей и т.п. в [4] введено и
разработано понятие спектра показателей, характеризующих варианты
определения последовательности рекуррентными формами различных
порядков. Так как любая пара вида (, m), где U* и mN, определяет на основе сопоставления этой паре геометрического образа законов
функционирования автомата, некоторый вариант автомата, то свойства
последовательности могут соответствовать свойствам автомата.
В данной работе для конечной или бесконечной последовательности
U* , где U = {u1, u2, …, uk}, вводится множество характеристических
функций
H={1, 2 , … , k} вида
i : U*{0,1}* , где
0, если prn ui
для всех nN. Набор
prn i ( )
1,если prn ui
1 ,2 , ..., k полностью
определяет последовательность U* , что при решении ряда задач
оказывается излишним и сокращение набора повышает эффективность
реализации процедур диагностирования. В частности, спектр числовых
показателей, характеризующий с использованием рекуррентных описаний размещение элементов в последовательности вторых координат точек геометрического образа автомата, может применяться к последовательностям значений характеристических функций i , 1 i k . Множество PH всех подмножеств множества H содержит варианты
упрощений наборов характеристических функций. Следующее очевидное утверждение в связи с его значением для рассматриваемого метода
выделим как теорему.
Теорема. Пусть законы функционирования инициальных дискретA S A , X ,Y , A , A
ных детерминированных автоматов
и
B S B , X ,Y , B , B , где Y l , определены геометрическими образа-
ми A и B , которым соответствуют множества H A 1A , 2A ,...,lA
и H B 1B , 2B ,...,lB характеристических функций. Автоматы A и
B распознаются простым безусловным экспериментом т. и т.т., когда
для некоторого i , 1 i l , выполняется неравенство iA iB .
Из этой теоремы следует, что, во-первых, для распознавания автомата в паре A, B достаточно найти только одну пару iA ,iB харак-
теристических функций, для которой выполняется условие iA iB , а
во-вторых, поиск такой пары должен осуществляться в множестве пар
iA ,iB 1 i l . В случае распознавания автомата в заданном семействе автоматов A j jJ задача распознавания усложняется
необходимостью поиска набора пар характеристических функций, а
при оптимизации процедуры диагностирования требуется перебор по
всем наборам пар характеристических функций, каждый из которых
достаточен для распознавания автомата.
Сущность предлагаемого метода технического диагностирования
заключается в замене анализа геометрических образов законов функционирования автоматов в ряде случаев принципиально более простыми
характеристическими функциями (сечениями геометрических образов
прямыми, параллельными оси абсцисс). Кроме этого, для введенных
характеристических функций применима оценка их сложности показателями, содержащимися в спектре показателей последовательности.
Спектр динамических параметров рекуррентного определения
числовых последовательностей
В качестве основной характеристики свойств последовательности
разработан спектр Ω() динамических параметров (см.[4]), представляющих правила построения последовательности с использованием рекуррентных форм различных порядков. Для этого рассматриваемой последовательности кодовых знаков =<u(1), u(2), …, u(t),…> сопоставляются рекуррентные формы F(z1, z2,…, zm)=zm+1 , у которых zi ,
1≤ i ≤m+1, принимают значения из множества V . Последовательность
определяется рекуррентной формой F (или последовательностью рекуррентных форм) по правилу: для любого t, t>m, F(u(t-m), u(t-m+1),
…, u(t-1))=u(t). При предполагаемом конечном множестве U рекуррентные формы любых порядков задаются эффективно.
Спектр () для последовательности имеет 5 уровней:
() = (0(), 1(), 2(), 3(), 4()), на которых числовыми значениями представлены порядки рекуррентных форм, длины отрезков после-
довательности, определяемые отдельными рекуррентными формами и
количества смен рекуррентных форм. По определению 0() = m0(),
где m0() - наименьший порядок рекуррентной формы, определяющей
всю последовательность . На уровне 1() спектра () расположено m0 чисел (m0 N+), определяющих для порядков от 1 до m0 размеры наибольших определяемых начальных отрезков последовательности . Уровень 2() содержит m0 чисел, показывающих, сколько раз
для рассматриваемого порядка рекуррентных форм потребовалось заменять рекуррентные формы при определении последовательности .
На уровне 3() каждое число смен рекуррентных форм, показанное
на уровне 2(), заменено длинами отрезков последовательности ,
определяемых отдельными рекуррентными формами.
С
использованием
введенных
обозначений
1
спектр () имеет структуру: ( ) m ( ) ; 1 ( ) d ( ), d 2 ( ),..., d ( ) ;
0
2 ( ) r ( ), r ( ),..., r ( )
1
2
; 3 ( )
3j ( ) d1j ( ), d 2j ( ),..., d njj ( )
0
( ), ( ),..., 3 ( )
1
3
2
3
,
где
m0 ( )
и
(nj – номер последнего отрезка в определении
последовательности как последовательности отрезков, определяемых
отдельными рекуррентными формами порядка j); ( ) ( ( )) , где оператор замены в 3 ( ) величин длин отрезков весами использованных рекуррентных форм для определения отрезков. Четвёртый уровень
4( ) спектра ( ) к характеристике последовательности по количеству изменений правил, определяющих взаиморасположение элементов в последовательности, и величинам областей действия правил,
представленной на уровнях 1( ) - 3( ), добавляет оценки сложности самих правил. В достаточно общем случае можно вводить веса правил (рекуррентных форм) и веса конкретных реализаций правил, используемых при определении конкретных отрезков.
4
3
Пример декомпозиции геометрического образа на характеристические функции по выходным сигналам
Пусть неисправности a1, a2 и a3 заданы геометрическими образами, расположенными на геометрических кривых, определённых соответственно уравнениями:
9
2
y2 = 4x (парабола), x 3 y 3 x y (лист декарта),
x2
y2
1 (эллипс)
1.82 22
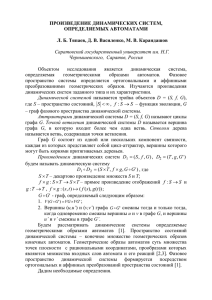
Рассматриваемые части этих кривых изображены на рис.1.
Задача диагностирования автомата в тройке автоматов A1 , A2 , A3 , являющихся моделями неисправностей a1, a2, a3, может быть решена не
только анализом полных геометрических образов законов функциони-
рования автоматов, но и сравнением характеристических функций:
1yi ,2yi ,3yi (для выделения неисправности a3 ) и 1y j ,2y j ,3y j (для
разделения неисправностей a1 , a2 ) (см. рис. 1). Для выходных сигналов y9 и y12 последовательности значений характеристических
функций геометрических образов рассматриваемых автоматов имеют
вид:
1y 9 0000010000 00000 ,
2y 9 0000010000 00000 ,
3y 9 0000001000 00000 ,
1y 12 0000000000 01000 ,
2y 12 0000000000 01100 ,
3y 12 0000000000 00000
Ось наблюдаемых диагностических признаков
y12
y9
1
2
3
4
5
6
p7 8
9
10 11 12 13 p14 15
Ось
диагностических
воздействий
Рис.1. Сечения геометрических образов законов функционирования автоматов
A1 , A2 , A3 для характеристических функций
1y 9 ,2y 9 ,3y 9
и
1y 12 ,2y 12 ,3y 12
Следовательно, для диагностирования неисправностей a1, a2 , a3 достаточно провести анализ указанных характеристических функций с диагностическими воздействиями p 7 и p14 .
Краткие выводы.
Переход от символьной формы задания законов функционирования дискретных детерминированных динамических систем (автоматов с
конечным или бесконечным множеством состояний) к непрерывным
математическим структурам в виде геометрических кривых линий,
определяемых уравнениями, позволяет решать ряд принципиально
важных задач: задавать законы функционирования автоматов числовыми уравнениями, доопределять частично заданные законы функционирования классическими методами интерполяции, распознавать законы
функционирования на основе решения числовым равенств и неравенств
и т.п. В данной статье рассмотрено упрощение геометрических образов
заменой их более простыми последовательностями значений характеристических функций. В техническом диагностировании это соответствует выборочному наблюдению только некоторых выходных сигналов объекта диагностирования.
Список литературы
1. Твердохлебов В.А. Техническое диагностирование в геометрической интерпретации задач, моделей и методов // Автоматизация проектирования дискретных систем. Материалы междунар. конф. / Белорус. гос. ун-т, Ин-т техн. кибернетики АНБ, Минск .1995.
2. Твердохлебов В.А. Геометрические модели и методы в техническом диагностировании // Информ.-управляющие системы на ж.-д.
транспорте. - 1996. - № 3/4. - С. 58. - В номере отражены материалы
междунар. науч.-практ. конф. "Перспективные системы управления на
железнодорожном, промышленном и городском транспорте", Украина,
Алушта, 11-16 сент. 1996 г.
3. Твердохлебов В.А. Геометрические образы конечных детерминированных автоматов, Известия Саратовского ун-та (Новая серия),
Т.5. Вып.1,Саратов, 2005, С.141-153.
4. Твердохлебов В.А. Геометрические образы законов функционирования автоматов.– Саратов: Изд-во «Научная книга», 2008. – 183 с.