Приложение 1 - Госуниверситет — УНПК
advertisement

Министерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
«ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ − УЧЕБНО-НАУЧНО-ПРОИЗВОДСТЕННЫЙ
КОМПЛЕКС»
(ФГОУ ВПО «Госуниверситет − УНПК»)
УДК 621.822+ 531.76.084/.085; 621.317.76.084/.085+ 531.7.084/.085
№ госрегистрации 01201062308
Инв.№
УТВЕРЖДАЮ
Проректор по научной работе
д-р техн. наук, проф.
______________ Ю. С. Степанов
«___»_________ ______ г.
Государственный контракт от 01 сентября 2010 г. № 14.740.11.0030
Шифр «2010-1.1-208-076-020»
ОТЧЕТ
О НАУЧНО-ИССЛЕДОВАТЕЛЬСКОЙ РАБОТЕ
В рамках федеральной целевой программы «Научные и научнопедагогические кадры инновационной России» на 2009-2013 годы
по теме:
МЕХАТРОННЫЕ ОПОРЫ РОТОРОВ АГРЕГАТОВ И МАШИН
НОВЫХ ПОКОЛЕНИЙ
(промежуточный, этап № 3)
Наименование этапа: «Проведение комплекса экспериментальных
исследований мехатронных подшипников»
Руководитель НИР,
д-р техн. наук, проф.
_________________
подпись, дата
Орел 2011
Л.А. Савин
СПИСОК ИСПОЛНИТЕЛЕЙ
Научный руководитель,
д-р техн. наук, профессор
14 ноября 2011 г.
Канд. техн. наук, доцент кафедры
«Мехатроника и международный
инжиниринг»
Л.А. Савин
(Введение)
Р.Н. Поляков
(Подраздел 1.1)
14 ноября 2011 г.
д-р техн. наук, профессор,
заведующий кафедрой «Подъемнотранспортные, строительные и дорожные
машины»
14 ноября 2011 г.
д-р техн. наук, профессор
Л.С. Ушаков
(Заключение)
В.И. Чернышев
(Заключение)
14 ноября 2011 г.
д-р техн. наук, профессор
О.В. Пилипенко
(Реферат)
14 ноября 2011 г.
д-р техн. наук, профессор, директор
технологического института ОрелГТУ
А.В. Киричек
(Введение)
14 ноября 2011 г.
д-р техн. наук, генеральный конструктор
«ГМС Насосы»
В.М. Рязанцев
(Подраздел 1.1)
14 ноября 2011 г.
д-р техн. наук, профессор
О.В. Соломин
(Подраздел 1.2)
14 ноября 2011 г.
Канд. техн. наук, заведующий кафедрой
Е.В. Сливинский
(Подраздел 1.1)
14 ноября 2011 г.
Канд. техн. наук, доцент
14 ноября 2011 г.
2
С.В. Широков
(подраздел 1.2)
Канд. техн. наук, доцент
А.А. Попиков
(Подраздел 1.3)
14 ноября 2011 г.
Канд. техн. наук, доцент
Зав. лаб. «Моделирование
гидромеханических систем»,
аспирант кафедры
«Мехатроника и международный
инжиниринг»
Ассистент кафедры
«Мехатроника и международный
инжиниринг»
Аспирант кафедры
«Мехатроника и международный
инжиниринг»
Аспирант кафедры
«Мехатроника и международный
инжиниринг»
Старший преподаватель кафедры
«Мехатроника и международный
инжиниринг»
Аспирант кафедры
«Мехатроника и международный
инжиниринг»
Аспирант кафедры
«Мехатроника и международный
инжиниринг»
Аспирант кафедры
«Мехатроника и международный
инжиниринг»
3
14 ноября 2011 г.
М.Б. Бородина
(Подраздел 1.3)
14 ноября 2011 г.
С.А. Герасимов
(Подраздел 2.1)
14 ноября 2011 г.
П.Г. Антонов
(подраздел 2.1)
14 ноября 2011 г.
Д.О. Базлов
(подраздел 2.1)
14 ноября 2011 г.
М.М. Ярославцев
(подраздел 2.2)
14 ноября 2011 г.
Л.В. Дорофеев
(Подраздел 2.2)
14 ноября 2011 г.
С.Ф. Ладыгин
(Подраздел 2.2)
14 ноября 2011 г.
С.А. Лаврушин
(подраздел 1.3)
14 ноября 2011 г.
Д.В. Александров
(подраздел 2.2)
Студент специальности
210401 «Мехатроника»
Студент специальности
210401 «Мехатроника»
14 ноября 2011 г.
Я.А. Лячин
(подраздел 1.1)
14 ноября 2011 г.
В.Г. Емельянов
(подраздел 1.1)
Канд. техн. наук
А.В. Алехин
(подраздел 2.2)
14 ноября 2011 г.
Канд. техн. наук, доцент
А.А. Стручков
(подраздел 2.2)
14 ноября 2011 г.
Инженер кафедры
«Мехатроника и международный
инжиниринг»
14 ноября 2011 г.
А.А. Морозов
(подраздел 3.1)
14 ноября 2011 г.
А.В. Корнаев
(подраздел 3.1)
14 ноября 2011 г.
Д.В. Шутин
(подраздел 1.2)
14 ноября 2011 г.
А.В. Федосов
(подраздел 3.2)
14 ноября 2011 г.
А.В. Чичварин
(подраздел 1.2)
14 ноября 2011 г.
В.М. Кавунов
(подраздел 3.2)
Канд. техн. наук, доцент
Аспирант кафедры
«Мехатроника и международный
инжиниринг»
Аспирант кафедры
«Мехатроника и международный
инжиниринг»
Канд. техн. наук, доцент
Заведующий лабораторией
4
Инженер
Студент специальности
210401 «Мехатроника»
14 ноября 2011 г.
Ю.А. Молоканов
(подраздел 3.1)
14 ноября 2011 г.
В.О. Тюрин
(подраздел 1.1)
14 ноября 2011 г.
М.В. Бычков
(подраздел 1.1)
14 ноября 2011 г.
Д.А. Золотухин
(подраздел 1.1)
14 ноября 2011 г.
М.А. Кожухов
(подраздел 1.1)
14 ноября 2011 г.
А.С. Галичев
(подраздел 1.1)
14 ноября 2011 г.
В.А. Воронина
(Реферат)
14 ноября 2011 г.
Н.В. Кизилова
Студент специальности
210401 «Мехатроника»
Студент специальности
210401 «Мехатроника»
Студент специальности
210401 «Мехатроника»
Студент специальности
210401 «Мехатроника»
Инженер кафедры
«Мехатроника и международный
инжиниринг»
Нормоконтролер
5
РЕФЕРАТ
Отчет 81 с., 30 рис., 5 табл., 5 источников
РОТОРНАЯ
СКОЛЬЖЕНИЯ,
СИСТЕМА,
МЕХАТРОННЫЕ
МЕХАТРОННЫЕ
ПОДШИПНИКИ
ПОДШИПНИКИ
КАЧЕНИЯ,
АКТИВНЫЕ МАГНИТНЫЕ ПОДШИПНИКИ, СЕНСОРЫ, АТУАТОРЫ,
АЛГОРИТМ
УПРАВЛЕНИЯ,
ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНАЯ
СИСТЕМА
Объектом проведенных исследований являются мехатронные опоры
роторов роторных машин, представляющие собой единый объект, в котором
можно выделить: подшипник (механическая часть), сенсоры и/или
актуаторы (электрическая часть) и информационно-измерительную систему
(информационная часть).
Цель работы Повышение надежности функционирования роторных
машин за счет применения мехатронных подшипников с функциями
диагностики и контроля за состоянием роторно-опорного узла.
Указанные цели достигались решением следующих основных задач:
1) разработкой принципиально новых конструкций мехатронных
подшипников;
2) проведением проектировочных расчетов рабочих характеристик
разработанных подшипниковых узлов;
3) разработкой и подбором программно-аппаратных средств для
реализации информационно-измерительной системы по управлению и
контролю мехатронными подшипниками;
4) подготовкой
документации и патентованием разработанных
конструкций мехатронных подшипников;
5)
разработкой
алгоритмов
мехатронных подшипников.
6
оптимального
проектирования
В результате были разработаны принципиально новые конструкции
мехатронных подшипников, основанные на синергетической интеграции
механических, электронных и контрольно-измерительных компонентов в
опорном узле, проведены проектировочные расчеты рабочих характеристик
разработанных
подшипниковых
программно-аппаратные
узлов,
средства
для
разработаны
реализации
и
подобраны
информационно-
измерительной системы по управлению и контролю мехатронными
подшипниками,
мехатронных
подготовлена
подшипников,
документация
разработаны
на
новые
алгоритмы
проектирования
мехатронных
подшипников,
математический
инструмент
получения
конструкции
оптимального
позволившие
наилучших
получить
характеристик
работоспособности опорного узла за счет варьирования параметрами
механической
и
контрольно-измерительной
подшипника.
7
частей
мехатронного
СОДЕРЖАНИЕ
Введение ................................................................................................................... 9
1 Разработка принципиально новых конструкций мехатронных
подшипников .................................................................................................... 13
2 Проведение проектировочных
расчетов
рабочих
характеристик
разработанных подшипниковых узлов .......................................................... 23
3 Разработка
и
реализации
подбор
программно-аппаратных
информационно-измерительной
средств
системы
для
по
управлению и контролю мехатронными подшипниками ............................ 41
4 Разработка алгоритмов оптимального проектирования мехатронных
подшипников .................................................................................................... 52
Заключение ............................................................................................................ 76
Список использованных источников .................................................................. 77
Приложение
А
−
Описание
конструкций
мехатронных
подшипников, подготовленных к патентованию............................................... 78
8
ВВЕДЕНИЕ
Надежность функционирования роторных машин в двигательных
установках авиационной и ракетно-космической техники, автомобильного и
водного транспорта (насосы, компрессоры, детандеры) в значительной мере
определяется работоспособностью опорных узлов. В настоящее время
существует
три
принципиально
различных
вида
подвеса
роторов:
подшипники качения, опоры жидкостного трения и электромагнитные
подшипники.
Каждому
виду
преимущества
и
недостатки,
возможность
их
применения
опорных
узлов
относительно
для
свойственны
которых
различных
свои
определяется
условий
работы.
Ограничивающими факторами для подшипников скольжения является
параметр предельной быстроходности, для подшипников скольжения –
число пусков и остановов, для электромагнитных подшипников – сложность
и стоимость системы электропитания и управления. Механизм выхода из
строя опорных узлов заключается в превышении действующих нагрузок
и/или скоростей сверх допустимых, что приводит к повышенному износу
рабочих поверхностей и последующему неустранимому функциональному
отказу. Критериально оценить возможность возникновения поломки можно
по долговечности, устойчивости и работоспособности в аварийных
ситуациях.
Долговечность
подшипников
качения
ограничена
несколькими
основными факторами:
1) усталостным выкрашиванием колец в результате знакопеременных
напряжений в зоне максимальной нагрузки;
2) механическим разрушением элементов подшипника из-за случайных
перегрузок, вызванных вибрацией или центробежными силами. В процессе
работы подшипника качения в зонах контакта при взаимодействии деталей,
как в поверхностных, так и во внутренних слоях материала происходят
определенные
качественные
изменения,
которые
при
определенных
условиях приводят к изнашиванию, выкрашиванию или объемному
разрушению.
9
Долговечность подшипников скольжения в режиме жидкостного трения
теоретически неограничена, так как происходит полное разделение
трущихся поверхностей смазочным слоем. Основной износ втулки
подшипника скольжения происходит на переходных режимах, к которым
относятся пуск и останов агрегата, а также неустойчивое движение в
результате самовозбуждающихся колебаний.
Долговечность активных магнитных подшипников зависит, прежде
всего, от надежности электронной схемы и системы электроснабжения.
Повышение
надежности
электронных
систем
достигается
путем
резервирования электронных элементов и цепей, а также электрообмоток
электромагнитов.
По
устойчивости
подшипники
качения
уступают
подшипникам
скольжения. Подшипники качения чрезвычайно чувствительны к ударным и
вибрационным нагрузкам, которые приводят к выкрашиванию тел и
дорожек качения, а подшипники скольжения обладают несомненным
преимуществом, за счет демпфирующей способности смазочного слоя. Но
при определенных сочетаниях рабочих и геометрических параметров
подшипника скольжения смазочный слой может сам являться источником
опасных самовозбуждающихся колебаний, но это явление стараются
устранить на этапе проектирования путем специальных конструктивных
решений:
увеличение
эксцентриситета,
применение
многоклиновых
поверхностей и др. Электромагнитные подшипники, являясь полностью
мехатронной системой, за счет электронной системы управления позволяют
контролировать перемещения вала в радиальном зазоре, позиционировать
ротор таким образом, чтобы вращение ротора происходило вокруг оси
инерции, а также электронное управление позволяет активно гасить
нежелательные колебания ротора.
Перегрузка в аварийных ситуациях для подшипников качения ведет к
заклиниванию, повышение температуры − к изменению механических
свойств материалов. Перекосы вызывают резкое повышение момента
трения, в меньшей мере это относится к самоустанавливающимся
подшипникам. Подшипник скольжения чувствителен к перекосам, но
10
допускает вращение, если температура в зоне контакта не приведет к
схватыванию поверхностей цапфы и втулки. Износ втулки с одной стороны
приводит к уменьшению грузоподъемности, а с другой ротор перемещается
в область высоких эксцентриситетов, что ведет к повышению устойчивости.
Касание недопутимо в агрегатах с лекговоспломеняющимися жидкостями.
Для электромагнитного подшипника работоспособность в аварийных
ситуациях зависит от чувствительности или быстродействия системы
контроля, плюсом является наличие страховочного подшипника качения.
Любой процесс, приводящий к повреждениям, можно контролировать с
помощью первичных преобразователей той или иной физической величины,
например износ с помощью датчиков перемещений, неустойчивость с
помощью акселерометров, повышенное трение с помощью датчиков
температуры и т.п. Введение сенсорных элементов в конструкцию опорного
узла превращает его в чисто мехатронную систему, состоящую из
механической части (деталей подшипника), электрической (сенсоры,
микроконтроллеры управления) и программной (программное обеспечение
по управлению сигнальной системой).
Можно сделать вывод о том, что введение сенсорных элементов в
конструкцию подшипников скольжения и качения может быть эффективно
использовано
для
контроля
за
износом
прогнозирования возможных отказов.
рабочих
поверхностей
и
Все это предъявляет к новым
мехатронным опорным узлам роторов требования по их детальному
изучению, как в плане проектирования и расчетов, так и технологических
особенностей.
Целью проекта является повышение надежности функционирования
роторных машин за счет применения мехатронных подшипников с
функциями диагностики и контроля за состоянием роторно-опорного узла.
В результате выполнения 3-го этапа проекта были решены следующие
задачи:
1)
разработаны принципиально новые конструкции мехатронных
подшипников, основанные на синергетической интеграции механических,
электронных и контрольно-измерительных компонентов в опорном узле;
11
2) проведены проектировочные расчеты рабочих характеристик
разработанных
подшипниковых
математических
моделей
и
узлов,
специализированных
позволившие оценить
требуемые
параметры
узлов
опорных
полученные
с
САЕ-систем
геометрические и
для
проведения
помощью
и
конструктивные
экспериментальных
исследований, а также параметры быстродействия и разрядности элементов
контрольно-измерительной системы;
3) разработаны и подобранны программно-аппаратные средства для
реализации информационно-измерительной системы по управлению и
контролю
мехатронными
достижениях
в
подшипниками,
области
основанные на
автоматического
управления
последних
техническими
системами;
4) подготовлена документация для патентования разработанных
конструкций мехатронных подшипников, выполненная в соответствие с
требованиями патентного законодательства РФ;
5)
разработаны
мехатронных
инструмент
алгоритмы
подшипников,
получения
оптимального
позволившие
наилучших
проектирования
получить
характеристик
математический
работоспособности
опорного узла за счет варьирования параметрами механической и
контрольно-измерительной частей мехатронного подшипника.
Результаты
проведенных
исследований
используются
при
проектировании перспективных турбонасосов на ОАО «Конструкторское
бюро химической автоматики» в рамках договора о совместном научнотехническом сотрудничестве.
12
1 Разработка принципиально новых конструкций мехатронных
подшипников
Разработка принципов конструирования мехатронных подшипников
имеет своей целью предложить последовательность, взаимосвязь и
взаимообусловленность этапов процесса конструирования [1].
Мехатронный подшипник, который необходимо сконструировать,
определим как часть роторной машины, которая также является частью
более крупной мехатронной системы. Такое деление необходимо, так как
уровень сложности современных мехатронных систем заставляет уже при
проектировании разбивать их на более мелкие подсистемы. При этом
проектирование разделяют на две стадии – внешнее и внутреннее.
Основным
содержанием
первой
стадии
проектирования
является
формулировка задачи, определение «входов» и «выходов», а также
определение связей мехатронного подшипника с другими элементами
машины, с контрольно-измерительной системой и внешней средой.
Содержанием второй стадии является разработка принципиальной схемы,
выявление наиболее важных технических характеристик подшипника и
подробная
проработка
конструкции,
включая
проектировочные,
проверочные расчеты и создание конструкторской документации.
Разрабатываемый
мехатронный
подшипник
должен
быть
рациональным и иметь очевидные преимущества по сравнению с типовой
конструкцией
опорного
механическую
часть.
узла,
Критерии
который
включает
рациональности
и
в
семя
их
только
приоритеты
проектировщик устанавливает самостоятельно в зависимости от назначения,
сложности и важности роторной машины. Такими критериями могут быть:
грузоподъемность, коэффициенты жесткости и демпфирования, масса,
стоимость, наличие функций самодиагностики и контроля и др.
Если говорить об этапах проектирования мехатронного подшипника,
то, как и проектирование любого технического объекта, они должны
состоять из следующих этапов: техническое задание; анализ взаимосвязей
мехатронного подшипника с внешним окружением; разработка технических
требований;
предварительное
конструирование
основных
частей
мехатронного подшипника; разработка вариантов эскизной компоновки
мехатронного
подшипника;
оптимизация
конструкции
и
разработка
окончательной конструкторской документации [2].
С другой стороны, учитывая, что мехатронный подшипник является
сложным объектом и каждая из его под систем, возможно, требует своей
процедуры проектирования, необходимо применять принципы системного
проектирования [3].
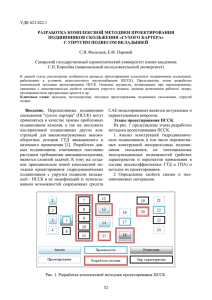
Системное проектирование комплексно решает поставленные задачи,
принимает во внимание взаимодействие и взаимосвязь отдельных объектовсистем и их частей, как между собой, так и с внешней средой, учитывает
социально-экономические
и
экологические
последствия
их
функционирования (рисунок 1.1).
Проектирование связано не только с техническими объектами,
например, имеется социальное проектирование. А потому существует много
определений этого слова. Но чаще всего под словом “проектирование”
подразумевают
практическую
удовлетворение
деятельности
потребностей
является
деятельность,
людей.
проект,
Конечным
т.е.
направленную
итогом
комплект
на
проектной
документации,
предназначенной для создания, эксплуатации, ремонта и ликвидации
(технического) объекта, а также для проверки или воспроизведения
промежуточных и конечных технических решений, на основе которых было
разработан данный объект.
Внутри процесса проектирования, наряду с расчетными этапами и
экспериментальными
конструирования.
исследованиями,
Конструирование
–
часто
выделяют
деятельность
по
процесс
созданию
материального образа разрабатываемого объекта, ему свойственна работа с
физическими моделями и их графическими изображениями. Эти модели и
14
изображения, а также и реальные механические объекты называют
конструкциями.
Очевидно, что сегодня традиционное проектирование по содержанию
само становится уже системным. И в дальнейшем словосочетание
“системное проектирование” будет использоваться только в случаях, если
потребуется подчеркнуть важность системности разработки.
Системное проектирование, как осознанная деятельность, обладает
определенной структурой, активно использует разнообразные методы и
оперирует различными видами представлений объектов.
Системное
проектирование
Объекты
Модели
Процесс
Элементная
база
Структура
Принципы,
законы,
методы
Рисунок 1.1 – Составные части системного проектирования
В системном проектировании, как и в других дисциплинах, можно
выделить инвариантную часть, общую для любого творческого процесса и
независящую от вида объекта разработки, и предметно-ориентированную,
учитывающую и использующую особенности того или иного объекта. В
данном пособии обе части излагаются совместно, применительно к
машинам, но, изменив вид рассматриваемого объекта, этот подход
распространим и на более широкую область технических систем, и может
представлять интерес для студентов разных технических специальностей и
всех тех, кто интересуется вопросами творчества.
Стадии проектирования, регламентированные стандартом.
Соответствующая им структура регламентирована стандартом (ГОСТ
2.103)
и
обязательна
при
официальных
взаимоотношениях
заказчиком и исполнителем или между соисполнителями работ.
15
между
Данная структура определяет содержание и последовательность
формирования комплекта проектной документации в процессе разработки
технической системы. Эта документация необходима для отчета перед
заказчиком о проделанной работе, возможности проверки или повторения
разработок
другими
исполнителями,
подготовки
производства
и
обслуживания в период эксплуатации. Основные стадии (этапы) структуры
представлены на рисунке 1.2.
Техническое задание (ТЗ) устанавливает основное назначение,
технические и тактико-технические характеристики, показатели качества и
технико-экономические
требования
к
разрабатываемой
технической
системе, предписание по выполнению необходимых стадий создания
документации и ее состав, а также специальные требования к изделию.
Техническое
предложение
(ПТ)
–
совокупность
документов,
содержащих техническое и технико-экономическое обоснование (ТЭО)
целесообразности разработки проекта. Такое заключение дается на
основании анализа ТЗ заказчика и различных вариантов возможных
решений,
их
сравнительной
оценки
с
учетом
особенностей
разрабатываемого и существующих изделий, а также патентных материалов.
Согласованное и утвержденное в установленном (на предприятии, в
министерстве и т.п.) порядке ПТ является основанием для разработки
эскизного проекта.
Эскизный проект (ЭП) – совокупность документов, содержащих
принципиальные решения и дающих общее представление об устройстве и
принципе работы разрабатываемой технической системы, а также данные,
определяющие ее назначение, основные параметры и габаритные размеры.
В случае большой сложности системы этому этапу может предшествовать
аван-проект
(предпроектное
теоретические
принципиальной
исследование),
исследования,
возможности
обычно
предназначенные
и
целесообразности
системы.
16
для
содержащий
обоснования
создания
данной
При необходимости на стадии ЭП проводят изготовление и испытание
макетов разрабатываемой системы.
Техническое задание
Техническое предложение
Эскизный проект
Технический проект
Разработка рабочей
документации
Опытного образца
Установочной серии
(опытного
производства)
Установившегося
производства
Сертификация
Рисунок 1.2 – Стадии разработки проектной документации
Технический проект (ТП) – совокупность документов, которые
должны содержать окончательные технические решения, дающие полное
представление об устройстве проектируемой системы, исходные данные для
разработки рабочей документации.
На стадии рабочего проекта (РП) сначала разрабатывают подробную
документацию для изготовления опытного образца и последующего его
испытания. Испытания проводят в ряд этапов (от заводских до приемосдаточных), по результатам которых корректируют проектные документы.
Далее
разрабатывают
рабочую
документацию
для
изготовления
установочной серии, ее испытания, оснащения производственного процесса
основных составных частей изделия. По результатам этого этапа снова
корректируют
проектные
документы
и
разрабатывают
рабочую
документацию для изготовления и испытания головной (контрольной)
серии. На основе документов окончательно отработанных и проверенных в
производстве изделий, изготовленных по зафиксированному и полностью
17
оснащенному
технологическому
процессу,
затем
разрабатывается
завершающая рабочая документация установившегося производства.
В процессе разработки проектной документации в зависимости от
сложности решаемой задачи допускается объединять между собой ряд
этапов. Этапы постановки ТЗ и технического проектирования могут входить
в цикл научно-исследовательских работ (НИР), а этапы технического
предложения и эскизного проектирования – образовывать цикл опытноконструкторских работ (ОКР).
Завершает структуру этап, подводящий итог проектной деятельности
– сертификация. Его назначение – определение уровня качества созданного
изделия и подтверждение его соответствия требованиям тех стран, где
предполагается его последующая реализация. Необходимость выделения
этого этапа в виде самостоятельного вызвана тем, что в настоящее время
экспорт продукции или ее реализация внутри страны во многих случаях
недопустимы без наличия у нее сертификата качества.
Одним
из
базовых
принципов
конструирования
мехатронных
подшипников является определение базовых механических составляющих,
элементов системы управления, сенсоров и актуаторов различной природы.
При выборе базового подшипника необходимо принимать во
внимание их достоинства и недостатки по сравнению друг с другом,
соотнося предельные характеристики и ограничения по условиям работы, а
также технологические аспекты изготовления и стоимостные показатели.
Сравнительные
характеристики
подшипников
качения,
подшипников
жидкостного трения и электромагнитных подшипников приведены в
таблице 1.
18
Таблица 1 – Сравнительные характеристики опорных узлов роторов
Подшипник качения
(ПК)
Подшипник жидкостного
трения (ПЖТ)
Электромагнитный
подшипник (ЭМП)
1
2
3
Потери на трение
Безразмерный коэффициент трения
f=10-2…10-3.
Безразмерный коэффициент
трения f=10-3.
Безразмерный
коэффициент
трения f=10 .
-4
Предельная быстроходность
Ограниченная предельная
Неограниченная предельная
Ограничение предельной
быстроходность. Для подшипников
нормальной точности линейная
быстроходность в режиме
жидкостного трения. Линейная
быстроходности зависит
скорость на поверхности цапфы не
превышает v=20 м/с.
скорость на поверхности цапфы
для ПЖТ достигает v=150 м/с.
материала цапфы. Для
только от прочности на разрыв
электротехнических сталей
v=200 м/с.
Несущая способность
Высокие удельные значения из-за
высокого модуля упругости
Зависит от скорости
относительного движения и
Зависит от системы питания и
материала тел качения
вязкости смазки.
электромагнитов.
параметров активных
Долговечность
Ограничена усталостным
Долговечность подшипников
Зависит, прежде всего, от
выкрашиванием колец в результате
знакопеременных напряжений в зоне
скольжения в режиме
жидкостного трения
надежности электронной
максимальной нагрузки, вызванных
вибрацией и центробежными
теоретически неограниченна.
Основной износ втулки ПЖТ
электроснабжения.
силами.
происходит на переходных
схемы и системы
режимах.
Жесткость
Данный показатель ниже по
В основном выше, чем у
В целом ниже, чем жесткость
сравнению с подшипниками
скольжения. Но в зависимости от
подшипников качения и АМП.
Порядок коэффициента
ПК и ПЖТ, но при
применения в конструкции
предварительного натяга достигает
жесткости 107 Н/м.
усложнениях системы
соответствующих
управления может быть
значений порядка 109 Н/м.
чрезвычайно высокой.
Устойчивость
Высокая чувствительность к
Высокое демпфирование со
Высокий показатель
ударным и вибрационным
нагрузкам.
стороны смазочного слоя
позволяет эффективно гасить
устойчивости, так как
уровень вибрации, но при
определенных условиях
позволяет активно гасить
смазочный слой сам становиться
источником самовозбуждаю-
ротора.
щихся колебаний.
19
электронное управление
нежелательные колебаний
Продолжение таблицы 1.1
1
2
3
Работоспособность в аварийных ситуациях
Перегрузка ведет к заклиниванию,
Чувствительны к перекосам, но
Наличие страховочного ПК и
повышение температуры к
допускает вращение, если
системы управления и
изменению механических свойств
температура в зоне контакта не
контроля с достаточным
материалов. В аварийных ситуациях
приведет к схватыванию
быстродействием
ПК склонен к разрушению.
поверхностей цапфы и втулки.
обуславливает повышенную
Касание цапфы и втулки
работоспособность ЭПМ в
недопустимо в агрегатах с
аварийных ситуациях.
легковоспламеняющимися
жидкостями.
Конструктивные особенности
Малые осевые габариты (не влияет
Большие осевые габариты
Соизмерим с подшипниками
на длину всего агрегата), большие
(влияют на длину агрегата),
качения по радиальным и с
радиальные габариты (не влияет на
малые радиальные размеры (не
подшипниками скольжения по
высоту агрегата, т.к. как этот размер
влияют на высоту агрегата),
осевым габаритам. Высокие
определяется габаритами рабочих
может быть разъемным. Эффект
значения зазоров облегчают
колес). Эффект самоустановки за
самоустановки за счет
монтаж.
счет применения тел качения
податливости смазочного слоя.
сферической формы.
Выбор элементов системы управления необходимо вести с позиций
обеспечения необходимого быстродействия в соответствии с частотой
контролируемого процесса и требуемой точности измерений.
Выбор актуаторов зависит от среды, в которой работают подшипники,
удобства размещения, вида контролируемой величины и т.д. По природе
своей
они
могут
быть:
механические,
гидравлические,
тепловые,
электромагнитные, электромеханические.
Обобщая
вышесказанное,
а
также
конструкции
мехатронных
подшипников по результатам патентного поиска, выполненного на 1-ом
этапе
проекта
исполнителями
проекта
предлагается
классификация мехатронных подшипников (рисунок 1.3).
20
обобщенная
Классификация мехатронных подшипников
по природе сил, воспринимающих внешнюю нагрузку
подшипники
качения
подшипники
жидкостного
трения
электромагни
тные
подшипники
комбинированные
опоры
по виду воспринимаемой нагрузки
радиально-упорные
радиальные
упорные
по виду контролируемого параметра
износ
S, мм
перемещение
(линейное х, мм
угловое φ, рад.)
давление
Р, Па
сила
F, Н
скорость
(линейная V, м/с
угловая ω, рад./с)
напряжение
U, В
сила тока
I, А
момент
М, Н/м
температура
Т, К
по степени интеграции в базовый объект
средняя
(сравнительно
небольшое
увеличение
габаритов по
сравнению с
базовой
конструкцией)
низкая
(отдельный
измерительный
модуль)
высокая
(минимальные
изменения в
конструкции)
по виду актуаторов
без
актуаторов
механич
еские
гидравли
ческие
электромаг
нитные
электромех
анические
по способу управления
активные
пассивные
активно-пассивные
Рисунок 1.3 − Обобщенная классификация мехатронных подшипников
21
Ниже приведены примеры различных конструкций мехатронных
подшипников и их сравнительные классификационные признаки.
Подшипник скольжения [4], содержащий корпус и размещенную в
нем втулку из биметаллического материала (рисунок 1.4). В слое
антифрикционного материала расположен изолированный провод, а корпус
снабжен элементом электрического питания, соединенным с изолированным
проводом и сигнальным устройством, причем изолированная часть провода
выступает в слое антифрикционного материала втулки на величину равную
предельному
износу,
что
позволяет
контролировать
наступление
предельного состоянии подшипника скольжения и, тем самым, повысить
надежность всего роторно-опорного узла.
1 – корпус, 2 − втулка подшипника скольжения из биметаллического материала,
3 − заизолированный провод, 4 − источник питания, 5 − сигнальное устройство, 6 − вал
Рисунок 1.4 − Мехатронный подшипник скольжения
Данный мехатронный подшипник классифицируется как радиальный
подшипник скольжения с контролируемым износом, высокой степенью
интеграции, без актуаторов. Высокая степень интеграции объясняется тем,
что конструкторское решение, использованное в патенте, фактически не
меняет базовую конструкцию биметаллического подшипника скольжения.
22
2 Проведение проектировочных расчетов рабочих характеристик
разработанных подшипниковых узлов
Проектирование мехатронных подшипниковых узлов представляет
собой сложный много итерационный процесс, включающий этапы
проектного и проверочного расчетов. В общем случае последовательность
расчета может быть представлена в виде следующего алгоритма (рисунок
2.1).
В качестве исходных данных выбирается: назначение подшипника,
условия его функционирования, вид смазки, вид воспринимаемой нагрузки,
а также необходимый ресурс. На этапе структурного синтеза производится
выбор типа подшипника, измерительно-информационной системы, модуля
преобразования сигнала, модуля управления, исполнительного механизма
коррекции, привода вращения.
В зависимости от вида трения в кинематической паре «вал –
подшипник» различают следующие виды подвеса роторов (рисунок 2.2). В
подшипниках качения имеет место постоянный подвижный контакт
последовательно расположенных элементов в точке (шариковые) или по
линии (роликовые, игольчатые и др.).
К достоинствам подшипников качения следует отнести: высокую
надежность, взаимозаменяемость, невысокую стоимость при нормальной
точности и удобство при эксплуатации, определяемые, прежде всего тем,
что большинство опор этого типа имеет стандартное исполнение и
выпускается специализированными предприятиями; небольшие осевые
размеры; отсутствие износа опорных частей вала; простота монтажа,
уплотнения и смазки; низкий коэффициент трения на всех скоростях,
режимах, включая пусковые моменты.
23
Рисунок 2.1 – Алгоритм расчета подшипниковых узлов
24
Рисунок 2.2 – Виды подвеса роторов
Следует отметить и тот факт, что для опор качения существует
определенная зависимость между параметром быстроходности d n и
критической скоростью ротора. Вследствие этого рабочие скорости
турбомашины могут быть ограничены пределом, при котором не
достигается максимальный КПД. Попытки понизить значение d n путем
уменьшения диаметра ротора при повышении скорости его вращения
приводят к снижению жесткости ротора и к уменьшению запаса по
критической скорости. Опоры скольжения не имеют ограничений по
параметру d n, и отстройка от критической скорости может быть
выполнена вне зависимости от параметра быстроходности, что позволяет
повысить скорость вращения ротора и КПД турбомашины. Кроме того, с
ростом
скоростей
вращения
роторов
увеличивается
динамическая
напряженность элементов машин, повышается их вибрация. В условиях,
когда скорости вращения измеряются десятками тысяч оборотов в минуту,
незначительное нарушение балансировки ротора может вызвать разрушение
опоры качения и аварийный останов машины. Подшипники скольжения при
этом обладают большей виброустойчивостью благодаря демпфирующим
свойствам смазочного слоя. Необходимо отметить, что расход смазочного
25
материала для подшипников жидкостного трения соизмерим с расходом для
охлаждения опор качения при работе на высоких скоростях.
Трение скольжения происходит в случае относительного перемещения
входящих
в
кинематическую
пару
поверхностей.
Характерной
особенностью этого вида трения является тот факт, что опорная реакция при
действии внешних активных сил отклоняется от нормали на некоторый
угол, при этом касательная составляющая полной реакции является силой
трения. Относительное скольжение обеспечивается, если угол наклона будет
больше некоторого предельного значения, зависящего от коэффициента
трения двух конкретных взаимодействующих тел. При этом различают
трение покоя (статическое) и трение движения (кинематическое), которое
реализуется при перемещении с некоторой относительной скоростью. В
зависимости от состояния и взаимного удаления поверхностей трение
скольжения может быть:
чистое, реализуемое лишь в вакууме при полном отсутствии в зоне
контакта посторонних примесей;
сухое – при полном отсутствии смазки и наличии на поверхностях
тонких пленок окислов и адсорбирующих молекул газов и жидкостей;
граничное,
поверхностями
характеризуемое
пленок
наличием
толщиной
менее
между
1
мкм,
трущимися
обладающих
специфическими смазочными свойствами;
полусухое – промежуточный вид с элементами сухого и граничного
трения;
полужидкостное, представляющее собой сочетание граничного и
жидкостного трения;
жидкостное, отличительной особенностью которого является наличие
между
поверхностями
кинематической
пары
гарантированного
слоя
смазочного материала толщиной h > K (Rz1 + Rz2).
Подшипниками скольжения жидкостного трения называют опоры
роторов,
в
которых
между
трущимися
26
поверхностями
имеется
разделительный слой, выполняющий смазочные и охлаждающие функции,
а также передачу сил от рабочих колес и других подвижных элементов на
корпус. Опоры данного типа подразделяются по принципу действия,
конструктивным
особенностям
и
целому
комплексу
признаков
(рисунок 2.3).
1. Фазовое состояние смазочного материала может быть жидким,
газовым и многофазным (как правило, двухфазным). К двухфазным смазкам
относят микрополярные жидкости, содержащие частицы, обладающие
собственным вращением, газожидкостные и парожидкостные среды.
Последние представляют собой двухкомпонентные смеси, например,
аэрированные жидкости или однокомпонентные вещества с различным
фазовым состоянием (кипящие жидкости, конденсирующиеся пары).
2. По способу создания несущей способности подшипники скольжения
могут быть гидростатические, с подачей рабочего тела в смазочный слой под
давлением
от
внешнего
источника;
гидродинамические,
в
которых
грузоподъемность создается за счет клинового эффекта при нагнетании
смазки в зазор между поверхностями шейки вала и подшипника под
действием
вращения
гидростатодинамические
и
вязкостных
(гибридные),
несущая
свойств
материала;
способность
которых
возникает за счет как сдвиговых, так и напорных течений вязкой среды.
3. По направлению действия воспринимаемой нагрузки различают
радиальные,
осевые
(упорные)
и
радиально-упорные
подшипники.
Радиальные опоры могут быть цилиндрические, многоклиновые, с лимонной
расточкой, многоцентровые, гибридные, полного и частичного охвата.
Упорные подшипники (подпятники) изготавливают одно- и двухстороннего
действия,
гидростатического
гидродинамического
с
(гидростатодинамические).
функционирование
типа
с
клиновыми
Следует
подпятника
с
различными
поверхностями
заметить,
гладкими
видами
камер,
и
гибридные
что
возможно
поверхностями
в
гидродинамическом режиме. В этом случае несущая способность смазочного
27
слоя формируется в результате действия теплового клина. Радиально-осевые
подшипники скольжения имеют коническую опорную поверхность или
представляют собой сочетание радиального и упорного подшипников.
4. Характер внешней нагрузки может быть: близким к стационарному,
как правило, однонаправленного действия, реализуемый в тяжелых
низкооборотных роторных системах; динамическим, годограф суммарной
силы которого представляет собой периодическую функцию, зависящую от
угла поворота ротора; сложнонагруженным, разнонаправленным, в том
числе ударного и импульсного действия.
5. Рабочие
поверхности
подшипников
могут
быть
жесткие,
деформируемые и подвижные. Втулки, вкладыши и корпуса подшипников в
большинстве
задач
смазки
принято
считать
условно
жесткими.
Деформируемые элементы выполняют в виде лепестков, лент или буферных
гофрированных пластин. В настоящее время в связи с совершенствованием
высокоскоростных роторных машин наблюдается активизация разработок
принципиально новых конструкций опорных узлов с упругими деталями.
Подвижные элементы
в большинстве случаев представляют собой
качающиеся сегменты (башмаки). Эти опоры считаются более устойчивыми,
чем с жесткими поверхностями, и находят применение в различных видах
машин и агрегатов. С появлением подшипниковых узлов мехатронного
типа, содержащих подвижные, управляемые с помощью электромагнитных
систем детали, роль этого вида опор в изделиях машиностроения будет
возрастать.
6. В зависимости от возможного направления вращения ротора
подшипники могут быть реверсивные или нереверсивные. При наличии
симметричного профиля рабочих поверхностей функционирование опор
может осуществляться в одинаковой мере при различных направлениях
вращения. Отдельные виды подшипников имеют сложную несимметричную
опорную
поверхность
(многоцентровые,
28
с
лимонной
расточкой,
многоклиновые и т. д.) и предназначены для работы при вращении ротора
только в одном направлении.
7. Особое направление классификации подшипников жидкостного
трения может быть выполнено по виду дросселирования смазочного
материала и виду компенсирующих устройств. Подача смазки в зону трения
может осуществляться в радиальном или осевом (щелевое дросселирование)
направлении. Потенциально возможно обеспечить подачу смазочного
материала в щелевой зазор и смешанным способом. Для реализации
рационального режима гидростатического подъема применяют различные
виды дроссельных устройств: капилляры (d << l), жиклеры (d ~ l) и
диафрагмы (d >> l). Различают прямоугольные, круглые, шевронные,
точечные и другие виды питающих камер, которые могут быть
расположены на опорной поверхности в один или два ряда, в шахматном
или произвольном порядке.
8. В
зависимости
от
функционального
назначения
различают
комбинированные варианты опорных узлов в следующих сочетаниях:
подшипник скольжения – подшипник качения, подшипник скольжения –
уплотнение, подшипник скольжения – демпфер, сочетание радиального и
упорного подшипников жидкостного трения.
Приведенная
классификация
отражает
только
основные
функционально-конструктивные разновидности подшипников скольжения. В
настоящее время в технических системах применяют сотни различных
вариантов опор жидкостного трения, проектирование которых в ряде случаев
требует нетиповых решений, применения специальных методов и средств.
Далее рассмотрим схемы основных видов подшипников.
Радиальная гидродинамическая опора представляет собой гладкую
цилиндрическую втулку, в которой располагается шейка ротора с
радиальным зазором величиной от нескольких микрон для газовых
подшипников до миллиметра для опор тяжелых турбин. Для работы ГДП
нет необходимости во внешнем источнике давления. Смазка подшипников
29
может происходить как при полном затоплении фрикционной зоны, так и в
режиме голодания, т.е. при частичном заполнении радиального зазора
смазочным
материалом.
При
моделировании
этих
опор
требуется
корректное назначение граничных условий при формировании смазочного
слоя в окружном направлении.
Подшипники скольжения
Смазочный материал
Жидкость
Микрополярный
Двухфазный
Газ
Парожидкостный
Газожидкостный
Способ создания несущей способности
Гидростатический
(ГСП)
Гидростатодинамический
(ГСДП)
Гидродинамический
(ГДП)
Направление воспринимаемой нагрузки
Радиальная
Радиально-осевая
Осевая
3600 градусный
конический
односторонний
частичного охвата
комбинированный
двусторонний
Характер действия нагрузки
Стационарная
однонаправленная
Динамическая
периодического действия
вращающаяся
Импульсная
ударная
сложнонаправленная
Опорные элементы
Втулка
Вкладыш
Сегменты
Состояние опорных поверхностей
Жесткие
Деформируемые
Подвижные
цилиндрические
многолепестковые
сегменты
конические
ленточные
сферические
лимонные
однолепестковые
с буферным элементом
плавающая втулка
многоцентровые
многоклиновые
гибридные
Рисунок 2.3 – Классификация подшипников скольжения
30
Направление вращения ротора
Реверсивные
Нереверсивные
Тип дросселирования
Капилляр
Жиклер
Диафрагма
Вид несущих камер
Расположение камер
•однорядные
•многорядные
•шахматный порядок
•комбинированный
•соединительные
•прямоугольные
•круглые
•точечные
•овальные
•шевронные
Направление подачи сказочного материала
Радиальное
Комбинированное
Осевое
Степень заполнения смазочного слоя
Заполненный
частично
Заполненный
Функционально-конструктивное исполнение
Многоопорные
Комбинированные
Адаптивные
подшипник скольжения
+
подшипник качения
подшипник скольжения
+
уплотнение
радиальный подшипник
+
подпятник
подшипник скольжения
+
демпфер
Рисунок 2.3 (продолжение)
При
проектировании
подшипников
скольжения
оперируют
комплексом различных параметров и характеристик. Набор геометрических
параметров включает основные габаритные размеры и конструктивные
особенности расположения элементов системы смазки. Частоту вращения,
удельную нагрузку, величину дисбаланса, давления и температуры на входе
и сливе из подшипника можно объединить в отдельную группу
кинематических, силовых и рабочих параметров. Теплофизические свойства
смазочного материала предполагают знание информации о вязкости,
31
плотности, теплоемкости, теплопроводности, энтальпии, энтропии, скорости
звука и т.д.
Интегральные,
или,
как
чаще
их
называют,
стационарные
характеристики включают грузоподъемность W, объемный (или массовый)
расход смазочного материала Q, потери мощности на трение и прокачку ΔN.
Суммарная грузоподъемность подшипника определяется по формуле
W Ri ( x ) R j ( y ) ,
2
2
(2.1)
где Ri, Rj, Rx, Ry – реакции смазочного слоя в соответствующих
направлениях,
которые
определяются
путем
интегрирования
полей
давлений
2
1
Ri p 0 DL dz p ( x , z ) cos( ( x) )dx;
0
0
1
2
R j p 0 DL dz p ( x , z ) sin( ( x) )dx;
0
0
1
(2.2)
2
R y p 0 DL dz p ( x , z ) cos( ( x)) dx;
0
0
1
2
0
0
R x p 0 DL dz p ( x , z ) sin( ( x)) dx.
Геометрические параметры (ГСДП с прямоугольными питающими
Диаметр
жиклера
Длина
жиклера
Длина
камеры
Число рядов
Число
камер
обозначение
Радиальный
зазор
Условное
Длина
Название
Диаметр
камерами)
D
L
h0
dн
lн
lк
nр
nк
Угловая
скорость
Удельная
нагрузка
Давление
подачи
Давление
в камерах
Давление
слива
Температура
на входе
Температура
на сливе
Название
Частота
вращения
Кинематические, силовые и рабочие параметры
n
q
P0
Pн
Pl
T0
Ta
Условное
обозначение
32
Размерность
об/мин
рад/с
Н/м2
Па
Па
Па
°С
°С
Теплофизические свойства смазочных материалов
Название
Вязкость
Плотность
Теплоемк
ость
Теплопро
водность
Энтальпия
Скорость
звука
Условные
обозначения
Cp
i
a*
Размерность
Пас
кг/м3
м3/(с2кг)
Н/(скг)
м2/с2
м/с
Интегральные (стационарные) характеристики
Название
Расход смазочного
Грузоподъемность
Потери мощности
W
N
Q
H
кВт
м3/с
Условное
обозначение
Размерность
материала
Динамические характеристики
Динамические
коэффициенты
демпфиров
жесткости
ания
Название
Условное
обозначение
Размерность
Массовый
Критические
частоты
Границы
устойчив
ости
Траектории
Амплитуды
Kij
Bij
nкр
n*
АЧХ
H/м
Hс/м
об/мин
об/мин
–
расход
смазочного
материала
для
подшипника
с
источником давления (ГСП) определяется путем суммирования расхода
через отдельные дроссельные устройства (формула для расчета объемного
расхода отличается тем, что отсутствует величина плотности на входе в
подшипник)
d H 2
Q n р 0
2
i 1
m
( p 0 p Hi )
,
( 0 Hi )
(2.3)
где nр – число рядов питающих камер; m – число камер в одном ряду; ψ –
коэффициент гидравлических потерь на входе и по тракту дроссельного
устройства; Р, РО – давление и плотность в питающих камерах и на входе в
подшипник.
33
Для гидродинамического подшипника с щелевым дросселированием
объемный расход определяется по формуле
2P0 P s
.
0 s
Q Ψ D h0
(2.4)
Потери мощности на трение и прокачку
N N Тр N p
D L
4
k x D
p
dx p0 Q .
h
h
x
dz
0
(2.5)
Набор динамических характеристик включает в себя матрицы
коэффициентов жесткости и демпфирования:
k11 k12
K i, j
;
k 21 k 22
b11 b12
Bi , j
.
b21 b22
(2.6)
Значения коэффициентов жесткости опор используются для расчета
собственных частот роторов nс. Границы устойчивости движения ротора n*
базируются на решении характеристических уравнений возмущенного
движения методами D-разбиений, Михайлова и других. Отдельный вид
задач динамики связан с расчетом траекторий движения опорных частей
ротора в смазочном слое подшипника скольжения, на основании которых
строятся амплитудно-частотные характеристики (АЧХ) и определяется
характер колебаний ротора.
Наиболее важным параметром, определяющим работоспособность
подшипника жидкостного трения, является толщина смазочного слоя,
которую можно представить в геометрической форме в виде функции
щелевого зазора h(x,z) между поверхностями шейки вала и втулки. Следует
заметить, что величина h(x,z) входит в дифференциальное уравнение
Рейнольдса и другие расчетные соотношения для определения полей
давлений в несущей смазочной пленке и в значительной мере определяет
уровень P(x,z). Кроме того, при выполнении условия h(x,z) > k(Rz1+Rz2)
обеспечивается режим жидкостного трения и осуществляется безызносное
функционирование
опорного
узла,
что
может
свидетельствовать
о
практически неограниченном ресурсе работы. В связи с этим представляется
34
необходимым подробнее остановиться на определении толщины смазочного
слоя – функции радиального зазора для различных видов подшипников
скольжения.
O
центр подшипника
X0
h0
R
X0
ось ротора (без перекоса)
O
Y0
O1
X
X
X3
X1
Z1
Y
Y1
Z
Y0
центр цапфы
h(, Z)
r
O1
ось подшипника
X1= X2
Y2= Y3
Z2
Z3
Y1
Y
а)
б)
Рисунок 2.4 – Схема расчета функций радиального зазора
При отсутствии осевого перекоса зазор в каждой точке опорной
поверхности зависит от значений трех параметров: начального радиального
зазора, эксцентриситета е и текущего угла α. Если за начало отсчета принять
точку, соответствующую минимальному значению hmin, то выражение для
расчета функции радиального зазора в размерном виде (рисунок 2.4, а)
запишется следующим образом:
в полярной системе координат – h h0 e cos ;
в декартовой системе координат – h h0 X sin Y cos ,
где – угол положения линии центров, X и Y – координаты,
определяющие положение центра цапфы в полярной и декартовой системах
координат соответственно: X = ρ ∙ sin α ; Y = ρ ∙ cos α .
В безразмерном виде функция зазора запишется:
в полярной системе координат – h( ) 1 cos( ) ;
в декартовой системе координат – h( ) 1 x sin y cos .
Более сложный вариант расчета функции радиального зазора связан с
учетом перекоса осей вала и втулки (рисунок 2.4, б). В реальности такая
35
ситуация может иметь место при изгибных деформациях гибкого вала или
конической прецессии жесткого ротора, а также при наличии монтажных
перекосов. Для проведения аналитического описания функции зазора
введем систему координат OX3Y3Z3, полученную путем поворота по часовой
стрелке связанной с центром ротора системы O1X1Y1Z1 на угол γ
относительно оси X и угол δ относительно оси Y (см. рис. 2.4, б). Таким
образом, перекос оси вала в вертикальной плоскости определяется углом γ, а
в горизонтальной – углом δ.
При наличии перекоса, т. е. в том случае, когда оси подшипника и
ротора пересекаются или скрещиваются. Такая ситуация может иметь место
не только в случае гибкого ротора при изгибе его оси, но и для жесткого
ротора, например, при его конической прецессии.
Функцию радиального зазора определяем из рассмотрения геометрии
опорного узла. В дальнейшем считается, что перемещения цапфы вдоль оси
подшипника отсутствуют. Центр системы координат OXYZ расположен
посередине длины подшипника, ось Z совмещена с его осью, а направления
осей X и Y соответствуют показанным на рисунке. При концентричном
расположении оси подшипника и ротора совпадают, а при эксцентричном –
ось ротора будет определяться осью Z1 системы координат O1X1Y1Z1,
полученной из исходной переносом начала координат на расстояния X0 и Y0
(эксцентриситет е) в положительном направлении соответствующих осей.
Перекос в вертикальной плоскости характеризуется углом , и ось ротора в
этом случае совпадает с осью Z2 системы координат O1X2Y2Z2, полученной
из системы O1X1Y1Z1 поворотом по часовой стрелке на угол относительно
оси X1. Перекос в горизонтальной плоскости определяется углом , который
при повороте по часовой стрелке относительно оси Y2 переводит систему
координат O1X2Y2Z2 в OX3Y3Z3. Теперь уже ось Z3 совпадает с новым
положением оси ротора. Уравнение поверхности цапфы в системе
координат O1X3Y3Z3 имеет, очевидно, следующий вид:
36
X 32 Y32 r 2 .
Связь
между системами координат OXYZ и O1X1Y1Z1, O1X2Y2Z2, O1X3Y3Z3 удобно
записать в матричных уравнениях1
X1
X
Y
1 M Y ;
П
Z1
Z
1
1
X2
X1
Y
2 M Y1 ;
Z 2
Z1
1
1
X3
X2
Y
3 M Y2 ,
Z3
Z 2
1
1
где соответствующие матрицы перехода имеют вид
1
0
MП
0
0
0 0 X0
0
1
1 0 Y0
0 cos
; M
0 sin
0 1 0
0 0 1
0
0
0
sin
cos
0
0
cos
0
0
; M
sin
0
1
0
(2.7)
0 sin
1
0
0
cos
0
0
0
0 .
0
1
Тогда связь между системами координат OXYZ и O1X3Y3Z3 примет вид
X3
Y
3 M M M
П
Z3
1
X
Y
.
Z
1
(2.8)
Учитывая малость смещения (X0, Y0 << R) и малость углов перекоса и
, можно пренебречь всеми величинами, содержащими их во второй степени
и выше или их произведения; также справедливыми оказываются
следующие соотношения: cos 1; sin ; cos 1; sin . С учетом
вышеизложенного уравнение поверхности цапфы в системе координат
OXYZ запишется:
X2 – 2XX0 – 2XZ + Y2 – 2YY0 – 2YZ = r2.
Как следует из геометрических соображений (см. рис. 2.1, а), функция
радиального зазора определяется соотношением: h = R – , в этом разделе
– радиус-вектор точки на поверхности цапфы, в которой ищется зазор;
отсчитывается от оси подшипника. Подставляя в полученное уравнение
поверхности цапфы соотношения: X = sin и Y = cos, получим
квадратное уравнение для определения радиуса-вектора :
2 2 X 0 Z sin Y0 Z cos r 2 0 ,
откуда, помня о малости перемещений и углов перекоса, найдем :
r X 0 Z sin Y0 Z cos .
1
Уравнения записаны в однородных координатах. Такой подход позволяет осуществить
единообразную матричную запись таких преобразований координат, как перенос и поворот.
37
Тогда функция зазора в декартовой системе координат имеет вид:
h h0 X 0 Z sin Y0 Z cos .
Учитывая, что X0 = esin и Y0 = ecos, функция радиального зазора в
полярной системе координат с учетом перекоса выглядит так:
h h0 e cos Z sin Z cos .
(2.9)
При синхронном прецессировании (линия центров лежит в плоскости
изгиба оси ротора) и отсутствии перекоса в горизонтальной плоскости
выражение (2.9) примет вид:
h h0 e Z cos ,
где и Z – угол наклона и прогиб изогнутой оси ротора.
Для
упорного
гидродинамического
подшипника
(УГДП)
c
наклонными несущими плоскостями функция осевого зазора может быть
определена из геометрии на основании уравнения наклонной плоскости,
проходящей через три точки (1, 2, 3) для одной колодки УГДП (рис. 2.2).
Для исследования влияния геометрии и проведения сравнительного анализа
в уравнение вводятся углы наклона по направлениям r и φ соответственно:
tg r z 2 R2 R1 ;
tg z 3 R 2 cos tg .
Окончательно функция осевого зазора примет вид:
hr , h0
R1
r sin
cos 1
tg cos tg tg r
sin
R2
(2.10)
tg r r cos R 2 .
Для случая наклона профильной поверхности только в одном
направлении (т. е. γr = 0) функция осевого зазора определяется как
h(r , ) h0 r sin tg .
Данное уравнение может быть использовано для моделирования
осевого зазора одноклинового упорного подшипника (рисунок 2.5), а также
для учета несоосности оси пяты и подпятника.
38
Рисунок 2.5 – Определение функции осевого зазора УГДП
(наклонная плоскость)
Моделирование сложных профилированных упорных поверхностей с
помощью уравнения плоскости не всегда возможно. Для устранения
данного недостатка можно использовать для описания осевого зазора
аппроксимированную
поверхность.
Исходными
данными
для
геометрического моделирования профиля клина является опорная ломанная
(рис. 2.2), которая с помощью аппарата функций Безье аппроксимируется
плавной кривой. Клин представляет собой объединение элементарных
кубических кривых. Параметрический вид кубической кривой Безье
B sp 0 3tp1 s 3t 2 p 2 s t 3 p 3 ,
s 1 t ,
где t 0,1 – параметр, pi – вершины ломаной. Количество вершин m
ломанной клина должно быть числом вида
m = 3i + 1, i = 1, 2, …
Рисунок 2.6 – Определение функции осевого зазора УПЖТ (перекос)
Параметрическая
модель
клина
(рисунок 2.7)
характеризуется
следующими геометрическими показателями: угол наклона поверхности:
γφ = arctg(dy /a);
коэффициент
использования
β = a /(a + b + c + 2d), β = 0,8…0,9.
39
поверхности:
Рисунок 2.7 – Параметрическая модель клина
Модели осевых зазоров, полученные на основе уравнения плоскости и
аппроксимации, представлены на рисунках 2.8 и 2.9 соответственно.
Осевой зазор УГСП при отсутствии перекосов пяты и подпятника
постоянный, т. е. не зависит от радиуса и угловой координаты.
Рисунок 2.8 – Модель осевого зазора
Рисунок 2.9 – Модель осевого зазора
наклонными плоскостями
аппроксимацией
40
3
Разработка
и
подбор
программно-аппаратных
средств
для
реализации информационно-измерительной системы по управлению и
контролю мехатронными подшипниками
Подбор
программно-аппаратных
средств
для
разрабатываемых
технических устройств является одним из важнейших этапов, так как
показатели их работы во многом определяют работоспособность всего
устройства в целом. Можно выделить следующие важнейшие критерии
подбора таких средств.
1 Соответствие техническим требованиям. При подборе аппаратнотехнических
средств
следует
ориентироваться
на
их
технические
характеристики (например, диапазоны измерений датчиков, динамические
характеристики исполнительных устройств и т.д.), которые должны
соответствовать условиям их работы. Если же говорить о программных
средствах, то они должны обладать функционалом, достаточным для
решения поставленной задачи и позволяющим решить ее в допустимые
временные сроки.
2 Совместимость. Как аппаратные устройства, так и программные
средства должны быть совместимы друг с другом, и при этом сохранять
необходимую функциональность. При этом необходимо обращать внимание
на совместимость каналов связи, физическую совместимость разъемов,
поддержку программными средствами аппаратных, и т.д.
3 Экономический фактор. Стоимость как программных, так и
аппаратных компонентов должна вкладываться в рамки бюджетов,
выделяемых для финансирования исследовательских задач, а в случае
разработки коммерческих продуктов – обеспечить себестоимость конечно
продукта, которая позволит сделать его рентабельным.
Процессу подбора конкретных средств реализации поставленной
задачи
предшествует
этап,
на
котором
предъявляемых к ним требований.
41
производится
выработка
Количественную оценку требований, предъявляемых к компонентам
системы управления мехатронным гидростатодинамическим подшипником
(МГСДП),
целесообразно
произвести,
опираясь
на
конкретную
материально-техническую базу. Лаборатория кафедры «Мехатроника и
международный инжиниринг» оснащена лабораторной установкой для
исследования
свойств
гидростатодинамических
роторных
опор
традиционной конструкции, которая по основным показателям может
являться идентичной установке, которая будет построена для изучения
МГСДП. Основные технические характеристики установки указаны в
таблице 2.
Таблица 2 − Технические характеристики лабораторной установки
Масса ротора
4 кг
Смазочный материал
вода
Давление подачи смазки в питающие камеры
0,2 МПа
Диапазон частот вращения ротора
0…5000 мин-1
При
подборе
программно-аппаратных
средств
одним
из
определяющих критериев является быстродействие каждого конкретного
устройства, что обусловлено условиями их работы в составе МГСДП.
Процесс управления разрабатываемым устройством является дискретным и
представляет собой последовательность циклов, включающих в себя сбор
информации с чувствительных элементов, ее обработку, произведение
расчетов и корректировку состояния исполнительных устройств. Циклы
следуют друг за другом с частотой νупр, определяемой частотой вращения
ротора и количеством точек пересчета на один оборот вала:
упр
n N
,
60
где n – частота вращения ротора, мин-1;
N – количество точек пересчета на один оборот вала.
42
(1)
Частоту следования циклов управления можно принять за основной
критерий, определяющий минимально потребное быстродействие средств,
входящих в состав МГСДП. На рисунке 3.1 приведены графики зависимости
νупр(n,N), причем N является дискретной величиной, которая задается
системой управления и определяется при ее проектировании.
Рисунок 3.1 – Потребное быстродействие системы управления МГСДП
Из рисунка 1 видно, что при заданных ранее условиях работы МГСДП
показатель потребного быстродействия может варьироваться в диапазоне от
0 до 2600 Гц, т.е. продолжительность каждого цикла регулирования может
составлять до 0,4 мс.
Исполнительные устройства
Исполнительными устройствами в МГСДП являются клапана,
оснащенные сервоприводами и играющие роль дроссельной заслонки,
регулирующей давление подаваемой в подшипник смазки. Поскольку такие
клапана являются механическими устройствами, они обладают свойствами
инерционности и имеют невысокие динамические характеристики.
43
Для использования в составе МГСДП предлагается использовать
быстродействующий клапан с интегрированным цифровым устройством
контроля положения Rexroth Bosh Group 4WRPNH, внешний вид которого
представлен на рисунке 3.2.
Рисунок 3.2 – Внешний вид клапана Rexroth Bosh Group 4WRPNH
Данное устройство представляет собой клапан прямого действия в
стальном корпусе, система привода – соленоид с пропорциональной
характеристикой. Основные технические характеристики данного клапана
представлены в таблице 3.
Таблица 3 − Технические характеристики клапана Rexroth Bosh Group
4WRPNH
Максимальное давление
35 МПа
Максимальный расход жидкости
40 л/мин
Гистерезис
≤0,2 %
Время полного открытия
10 мс
Диапазон температур жидкости
-20…+60 °C
Масса
2,7 кг
44
К датчикам перемещения в составе МГСДП, помимо общих
требований, касающихся точности, линейности характеристик и т.д.,
предъявляется ряд специальных требований:
1) диапазон измерения от 0 до нескольких миллиметров и высокая
разрешающая способность;
2) аналоговый сигнал на выходе;
3) минимальные размеры;
4) малое время отклика на изменяющуюся величину.
В
качестве
датчиков
перемещения
предлагается
использовать
индуктивные датчики AlphaProx IWRM 06, характеристики которых
представлены в таблице 4.
Таблица 4 − Технические характеристики датчика перемещения AlphaProx
IWRM 06
Диапазон измеряемых расстояний
0…2 мм
Разрешение:
статическое
<0,001 мм
динамическое
<0,005 мм
Нелинейность
± 100 мкм
Время полного открытия
10 мс
Диапазон температур жидкости
-20…+60 °C
Время отклика
< 0,7 мс
Выходной сигнал
0…10 В или 0…10 мА
Основными критериями подбора АЦП и ЦАП являются частота
дискретизации, характеризующая быстродействие этих устройств, а также
разрядность, которая определяет точность измерения и задания аналоговых
величин.
Для АЦП необходимую разрядность можно найти из следующего
соотношения:
45
Q log 2
L
,
Rmax
(2)
где Q – минимальная разрядность АЦП;
ΔL
–
диапазон
измерения
аналоговой
величины,
для
датчика
перемещения – 2 мм (см. таблицу 4);
Rmax – максимальная разрешающая способность измерения аналоговой
величины – 0,001 мм (см. таблицу 4);
В таком случае необходимая разрядность АЦП составит Q ≥ 10,966.
Ближайшее значение разрядности АЦП, которые серийно выпускаются
промышленностью, составляет 12 разрядов. Аналогичная разрядность будет
удовлетворять и требованиям ЦАП.
Требуемую частоту дискретизации определим исходя из теоремы
Котельникова, которая гласит, что если аналоговый сигнал имеет
ограниченный спектр, то он может быть восстановлен однозначно и без
потерь по своим дискретным отсчетам, взятым с частотой строго большей
удвоенной верхней частоты спектра fB:
f 2 fВ.
(3)
Примем верхнюю границу спектра равной частоте следования циклов
регулирования fB = νупр = 2600 Гц, тогда получим условие выбора АЦП по
частоте дискретизации: f > 5,2 кГц.
Полученным требованиям удовлетворяет преобразователь сигналов
National Instruments PCI-6229, который выполнено в форм-факторе платы
под PCI разъем персонального компьютера и совмещает в себе ЦАП и АЦП.
Внешний вид устройства представлен на рисунке 3.4, его основные
характеристики приведены в таблице 5.
46
Рисунок 3.4 – Внешний вид преобразователя сигналов NI PCI-6229
Таблица 5 – Технические характеристики преобразователя сигналов NI PCI6229
Совместимость с операционными системами
Linux , Mac OS ,
Windows , Real-Time
Частота дискретизации
250 кГц
Разрядность
16 бит
Количество аналоговых входов
32
Количество аналоговых выходов
4
Вид аналоговых сигналов
± 10В
Количество дискретных вводов-выводов
48
Время отклика
< 0,7 мс
Программный
комплекс
LabView
является
современным
и
высокоэффективным средством сбора и обработки данных, управление
техническими объектами и технологическими процессами. Данная среда
обладает обширным инструментарием, позволяющим создавать системы
управления
любой
сложности.
Основой
среды
LabView
является
программное обеспечение для создания виртуальных приборов и связи их с
47
аппаратными компонентами. Программная реализация средств измерения
позволяет создавать весьма гибкие и функциональные измерительные
комплексы, способные решать широкий спектр задач.
Отличительной
особенность
LabView
является
то,
что
она
ориентирована не только на решение прикладных технических задач, но
также на проведение научных
исследований. Данное программное
обеспечение позволяет проводить комплексные испытания образцов новой
техники. Эти особенности среды LabView делают ее наиболее подходящим
программным средством для разработки системы управления МГСДП.
На рисунке 3.5 представлена схема, отражающая компонентную
структуру системы управления МГСДП с указанием входящих в нее
основных программно-аппаратных средств.
Высокоскоростной
сервоклапан Rexroth Bosh
4WRPNH
Частотный преобразователь
Преобразователь сигналов
NI PCI-6229
Индуктивные датчики
перемещения AlphaProx
IWRM 06
Электродвигатель
Рисунок 3.5 – Компоновка программно-аппаратных средств системы
управления МГСДП
48
Поскольку основным ограничивающим фактором подбора аппаратных
средств,
составляющих
систему
управления
МГСДП,
является
их
быстродействие, то целесообразно рассмотреть влияние этого фактора на
поведение системы в целом.
Конфигурация системы управления МГСДП такова, что наиболее
ограниченным по быстродействию является механическое исполнительное
устройство, которое в силу инерционности механических элементов не
способно изменять свое состояние так же быстро, как и другие устройства.
Это накладывает существенные ограничения на допустимые режимы работы
роторной системы, снабженной МГСДП, использующей дискретный
процесс управления с использованием ПИД-закона регулирования. Так,
определенную ранее величину минимально потребного быстродействия νупр
можно также рассматривать как верхний предел условий, задаваемых
параметрами (n,N), при котором система управления еще успевает
отрабатывать и противодействует нежелательным колебаниям вала. Если же
параметры
функционирования
устойчивости,
быстродействие,
то
для
чем
системы
корректной
способны
превышают
работы
ей
обеспечить
этот
требуется
аппаратные
порог
большее
средства.
Рассмотрим особенности работы МГСДП в этих режимах.
Пусть некоторая функция X2(t) отражает возмущения в системе, то
есть
нежелательные
колебания
ротора,
которые
должны
быть
минимизированы корректирующим воздействием (изменяемым давлением
подачи смазки), которое отражает функция X1(t) (рисунок 3.6а). Обе этих
функции имеют гармонический или близкий к гармоническому вид.
При режиме, когда система управления успевает отрабатывать
возмущения, периоды функций X1(t) и
X2(t) совпадают, при этом они
находятся в противофазе, и при взаимном наложении эти колебания
компенсируют друг друга, в идеальном случае в любой момент времени
X1(t)+X2(t)=0. В реальной системе полной компенсации не происходит, и
функция X12(t)= X1(t) +X2(t), являющаяся суперпозицией X1(t) и
49
X2(t)
(рисунок 3.6в), имеет некоторую амплитуду, много меньшую амплитуды
исходных возмущений.
Рисунок 3.6 – Работа системы при превышении границы устойчивости
Если система переходит в режим, при котором требуемая частота
циклов регулирования превышает предельную для данной аппаратной
конфигурации, то появляется отставание корректирующей функции X1(t) от
возмущений X2(t), что выражается в неравенстве периодов колебаний.
50
Частота
возмущающих
колебаний
при
этом
превышает
частоту
формирования корректирующего воздействия, которая ограничивается
динамическими характеристиками аппаратных средств (рисунок 3.6б). При
этом функция XН(t), отражающая суперпозицию X1(t) и X2(t) (рисунок 3.6в),
будет иметь негармонический вид и может рассматриваться как хаотично
изменяющийся сигнал. Такое воздействие на роторную систему способно
вызвать непредсказуемое поведение ротора в подшипнике скольжения, в
том числе усилить амплитуду его нежелательных колебаний. В свою
очередь, усиление таких колебаний может привести к возникновению
чрезмерных нагрузок, появлению сухого трения, быстрого износа деталей и
прочим неблагоприятным последствиям.
Такой вид нестабильности роторной системы характерен только для
опор с активным управлением, так как причиной его возникновения служит
некорректное
функционирование
органов
активного
воздействия.
Вызванная подобными причинами нестабильность поведения ротора может
быть устранена только путем возврата системы в допустимые режимы
работы. Следовательно, при проектировании опор с активным управлением
необходимо определять границы нормального функционирования и вводить
соответствующие ограничения.
51
4 Разработка алгоритмов оптимального проектирования мехатронных
подшипников
Объекты проектирования и формулировка задач
Рассмотрим два наиболее типа мехатронных подшипников, как
объектов оптимального проектирования: радиальный активный магнитный
подшипник
(АМП)
и
радиальный
мехатронный
гидростатический
подшипник (МГСП). Выбор именно этих объектов обусловлен тем что,
данные типы подшипников являются наиболее общими примерами
мехатронных опор с двумя наиболее используемыми управляемыми
средами позволяющими создать несущую способность: электромагнитное
поле – АМП и жидкость – МГСП.
Таким
образом,
разрабатываемые
алгоритмы
оптимального
проектирования выбранных типов подшипников будут обладать общностью
и универсальностью, что позволит применять их и к другим типам активных
мехатронных подшипников (упорным и радиально-упорным).
Принцип работы АМП поясним на примере рисунка 4.1. Для
обеспечения положения ротора в заданных пределах (целевая функция
системы
управления)
производится
мониторинг
положения
ротора
датчиком, сигнал с которого поступает в систему управления. Как правило,
выходной сигнал с датчика аналоговый, поэтому для обеспечения его
дальнейшей обработки его оцифровывают, то есть в состав системы
управления входит аналогово-цифровой преобразователь (АЦП), затем с в
соответствие с заданной программой управления (процессор системы
управления) входной оцифрованный сигнал преобразуется в выходной. Для
дальнейшей работы мехатронной системы выходной цифровой сигнал
преобразуется в управляющий аналоговый по средствам цифро-аналогового
преобразователя (ЦАП). Управляющий аналоговый сигнал, получаемый на
выходе ЦАП, имеет малую мощность, поэтому для адекватного воздействия
на объект управления его необходимо усилить с помощью усилителя
мощности. Усиленный сигнал подается непосредственно на электромагнит,
52
в зависимости от величины сигнала изменяется магнитное поле создаваемое
электромагнитом.
Цапфа
ротора
конструктивно
выполнена
из
ферромагнетика (электротехнической стали), поэтому под воздействием
поля, создаваемого электромагнитом, ротор вследствие действия магнитной
силы перемещается в корректируемое положение в соответствии с целевой
функцией.
Рисунок 4.1 – Принципиальная схема АМП
Заметим, что ротор как ферромагнетик значительно сам влияет на поле
создаваемое электромагнитом в зависимости от своего положения в
радиальном зазоре подшипника. Поэтому на практике для обеспечения
работоспособности и устойчивости данной системы используют восьми
полюсную схему электромагнита (рисунок 4.2).
Рисунок 4.2 – Восьми полюсная схема электромагнита
53
Полюса (катушки) соединяются в электрические цепи таким образом,
чтобы образовались верхний и нижний электромагнит, а также левый и
правый электромагнит, управление при этом осуществляется над парами
(верхней - нижней и левой - правой), осуществляя позиционирование ротора
в плоскости перпендикулярной его оси.
Принцип
работы
мехатронного
гидростатического
подшипника
(рисунок 4.3) состоит в следующем: вал 1 установлен в корпусе опоры 2,
также в корпусе установлены датчики давления 3 и устройства подачи
смазки под давлением 4. Возникающие при вращении вала радиальные
колебания вызывают локальные зоны с повышенным давлением смазки,
которое
воспринимается
датчиками
давления,
преобразуется
в
электрический сигнал и передается в блок управления. Блок управления
выдает необходимые управляющие воздействия на устройства, подающие
смазку
в
область
вращения
вала
под
давлением,
рассчитанным
управляющей программой в соответствии с показаниями датчиков.
Для более конкретной постановки задачи и разработки математической
модели рассмотрим пространственную модель жесткого симметричного
ротора, установленного на два одинаковых МГСП (рисунок 4.4а). Ротор
изображен в некотором возможном положении, при котором под действием
внешних сил веса и дисбаланса, а также реакций смазочного слоя он
занимает в пространстве некоторое положение, описываемое в пространстве
координатами x1, y1 в сечении I и x2, y2 в сечении II.
Для упрощения задачи построения математической модели рассмотрим
элементарный цикл регулирования в одной плоскости OYZ (рисунок 4.4б).
Допустим, в процессе движения ротор занимает положение, при котором
y1<0, y2>0, тогда требуется подать такой управляющий сигнал на дроссели
выходных каналов I-IV, чтобы давление в подшипниках стремилось
выровнять ось ротора, то есть, чтобы y1→0, y2→0.
54
Рисунок 4.3 – Мехатронная опора скольжения
Y
z2
zG
●
z1
●
O
●
y1
y2
x2
Z
x1
●
X
а)
p вI х
I
pкор
Y
III
pкор
p вIIIх
I
III
B
●
y2
O
●
●
●
y1
Z
●
А
II
II
pкор
IV
p вIIх
IV
pкор
p вIVх
б)
Рисунок 4.4 – Пространственная модель жесткого симметричного ротора
55
Таким образом, задача управления МГСП сводится к следующему: для
каждого
текущего
положения
вала
необходимо
подобрать
такие
корректирующие воздействия, которые будут стремиться выровнять ось
ротора. Рассматривая задачу в плоскости (рисунок 4.4б) для одной опоры,
определим, что регулируемым параметром будет положение (координата y)
точки А (В), являющейся точкой пересечения оси ротора и плоскости, в
которой находятся регулирующие органы. Тогда получим для каждого
положения вала постоянную установку y=0 и рассогласование ε=yx, где yx –
текущая координата точки А (В).
Для синтеза рассмотренных систем в области их параметров
необходимо применять аппарат оптимального проектирования для поиска
значений управляемых переменных (переменных проектирования, суть
параметров
системы)
функционирование.
С
обеспечивающих
точки
зрения
наилучшее
структуры
приемлемое
рассматриваемых
мехатронных систем здесь можно выделить два взаимосвязанных уровня
проектирования:
проектирование
исполнительной
системы
и
проектирование системы управления. Такое разделение необходимо для
общности метода, под проектированием исполнительной системы будем
понимать определение оптимальных значений геометрических и рабочих
параметров подшипника (габаритные размеры, номинальный диаметр вала,
уровень давления питающих камер, уровень тока (напряжения) в цепи
электромагнитов, угловая скорость вращения ротора и т.п.)
Для решения задач управления подобного рода наиболее применимы
ПД, ПИД и ПИДДТ-регуляторы, которые способны обеспечить требуемое
регулирование с достаточной точностью. Подбор оптимальных параметров
таких регуляторов и составляет суть проектирования системы управления.
Выбор конкретной схемы систему управления определяется типом,
исполнительной системы, критериями которым должна удовлетворять
опора, а также спектром внешних воздействий. В тоже время поиск
оптимальных параметров исполнительной системы не возможен без,
56
критериев сформированных на основе данных, о внешних воздействиях на
систему и условий ее работы. Таким образом, рассмотренные уровни
проектирования не разделимы друг от друга значения переменных
проектирования, как системы управления, так и исполнительной системы
должны
одновременно
удовлетворять
условиям
оптимальности,
сформированным на каждом уровне проектирования.
2. Методика оптимального проектирования исполнительной системы
АМП
Определение оптимальных параметров АМП основано на информации
о внешнем воздействии на него и его реакции на это воздействии. Поэтому
основой проектирования АМП является достаточно точная математическая
для расчета магнитных сил (реакции) действующих на ротор.
Общей задачей расчета магнитного поля постоянных токов является
нахождение вектора магнитной индукции B и вектора напряженности
магнитного
поля
H
во
всех
точках
пространства
по
заданному
распределению плотности токов J.
Решить такую задачу в статическом случае можно с помощью
уравнений Максвелла, представленных в дифференциальном виде:
H J
(4.1)
B 0
(4.2)
Из этих уравнений следует, что циркуляция вектора H по любому
замкнутому контуру равна полному току, а поток вектора B сквозь
произвольную замкнутую поверхность всегда равен нулю.
А также уравнение:
B 0 r H H
(4.3)
где μ0 – магнитная постоянная, μr – относительная магнитная проницаемость
материала.
Известно, что для произвольной векторной функции, например A(x, y,
z) справедливо равенство:
57
( A) 0
(4.4)
Исходя условия (4.4) и учитывая уравнения (4.1) – (4.3) , а также считая
магнитное
поле
однородным
вдоль
оси
ротора,
можем
записать
формулировку:
1
( A) J
(4.5)
Как и говорилось ранее, одной из основных целей расчета АМП
является нахождение электромагнитной силы F для поднятия ротора в
подшипнике. Ее компоненты Fx и Fy, можно рассчитать по следующим
соотношениям:
Fx
L
0
2 1 2
B
B
n
B
B
n
x
x
x
y
y
ds ;
s
2
Fy
L
0
B
s
2
y
(4.6)
1 2
B n y Bx By nx ds ,
2
(4.7)
где L – длина подшипника в направлении оси ротора; Bx и By – компоненты
вектора B; s – контур цапфы ротора; nx и ny – компоненты вектора внешней
единичной нормали к контуру цапфы ротора.
Для решения данной задачи используется метод конечных элементов
(МКЭ)
реализованный
исполняемые
файлы
в
на
среде
Matlab
языке
PDETool.
Matlab,
Были
позволяющие
написаны
создать
параметрическую модель АМП, построить конечно-элементную модель
(рисунок 4.5), рассчитать характеристики электромагнитного поля (рисунок
4.6), а также определить реакцию подшипника.
Оптимальное проектирование АМП основано на идее линеаризации
существенно нелинейных реакций Fx и Fy (рисунок 4.7) в области
переменных: ix – управляющий ток на левом и правом электромагнитах; iy –
управляющий ток на верхнем и нижнем электромагнитах; X и Y –
координаты геометрического центра цапфы ротора.
58
Рисунок 4.5 – Модель подшипника, представленная с
конечно-элементной сеткой
а)
б)
а) с центральным положением ротора; б) со смещенным положение ротора
Рисунок 4.6 – Магнитное поле АМП
59
Проводя разложение нелинейных реакций в ряд Маклорена в
пространстве параметров (ix, iy, X, Y), пренебрегая, членами второго порядка
и выше получим:
Рисунок 4.7 – Нелинейные реакции АМП
Fx kxx X kxyY hxxix hxyiy ;
(4.8)
Fy k yx X k yyY hyxix hyyi y ,
(4.9)
где kxx, kxy, kyx, kyy – коэффициенты позиционной жесткости; где hxx, hxy, hyx,
hyy – коэффициенты токовой жесткости, которые определяются следующими
зависимостями:
k xx
hxx
Fx
x
Fx
ix
; k xy
y ix i y 0
; hxy
x y i y 0
Fx
y
Fx
iy
; k yx
x ix i y 0
; hyx
x y ix 0
Fy
x
; k yy
y ix i y 0
Fy
ix
; hyy
x y i y 0
Fy
y
; (4.10)
x ix i y 0
Fy
iy
.
x y ix 0
Далее определим переменные проектирования (рисунок 8):
- толщина ферромагнитного материала цапфы ротора wry (x1);
- толщина кольца статора wsy (x2);
- ширина полюса wp (x3);
- длина подшипника L (x4).
60
(4.11)
Рисунок 4.8 – Переменные проектирования АМП
Кроме этого введем ограничения на остальные геометрические и
рабочие
параметры,
будем
считать
заданными
из
конструктивных
соображений:
- внешний радиус статора rs;
- внешний радиус ротора rsh;
- номинальный радиальный зазор 0;
- максимально допустимое значение тока в обмотке электромагнита I0;
- максимально допустимый эксцентриситет ротора emax.
Введем в рассмотрение переменные:
kxx kxx,nom kxx,max ;
k yy k yy,nom k yy,max ;
k xy k xy,nom k xy,max ;
hxx hxx,nom hxx,max ;
k yx k yx,nom k yx,max ;
hxy hxy,nom hxy,max ;
hyx hyx ,nom hyx ,max ; hyy hyy,nom hyy,max ,
где индекс «nom» соответствует расчету коэффициента в окрестности нуля,
индекс «max» в окрестности максимально возможного значения (emax или I0).
61
Для некоторого начального набора параметров проектирования
( x10 , x20 , x30 , x40 ) введем обозначения:
kxx 0 kxx 0,nom kxx 0,max ;
k xy 0 k xy 0,nom k xy 0,max ;
k yx 0 k yx 0,nom k yx0,max ;
k yy 0 k yy 0,nom k yy 0,max ;
hxx0 hxx0,nom hxx0,max ;
hxy 0 hxy 0,nom hxy 0,max ;
hyx 0 hyx 0,nom hyx 0,max ; hyy 0 hyy 0,nom hyy0,max .
Тогда можно сформулировать задачу поиска оптимальных параметров
в смысле Парето для следующего набора критериев оптимальности и
штрафных функций:
Qxx 0,8
hxx
k
0,2 xx P1xx P2 xx ;
hxx 0
k xx 0
hxx
if hxx 1,1hxx 0 ;
0,8
P1xx hxx 0
0 else;
P2 xx
k xx
if k xx 1,1k xx 0 ;
0,2
k xx 0
0 else;
Qxy 0,8
hxy
hxy 0
0,2
k xy
k xy 0
P1xy P2 xy ;
hxy
if hxy 1,1hxy 0 ;
0,8
P1xy hxy 0
0 else;
P2 xy
k xy
if k xy 1,1k xy 0 ;
0,2
k xy 0
0 else;
62
Qyx 0,8
hyx
hyx 0
0,2
k yx
k yx 0
P1 yx P2 yx ; Qyy 0,8
hyy
hyy 0
0,2
k yy
k yy 0
P1 yy P2 yy ;
hyx
if hyx 1,1hyx 0 ;
0,8
P1 yx hyx 0
0 else;
hyy
if hyy 1,1hyy 0 ;
0,8
P1 yy hyy 0
0 else;
k yx
if k yx 1,1k yx 0 ;
0,2
k yx 0
0 else;
k yy
if k yy 1,1k yy 0 ;
0,2
k yy 0
0 else.
P2 yx
P2 yy
Методика оптимального проектирования исполнительной системы МГСП
Определение оптимальных параметров МГСП, также как и АМП
основано на расчете реакций подшипника
Расчет реакций подшипника скольжения в режиме жидкостного трения
с достаточной степенью точности может быть основан на совместном
решении уравнения Рейнольдса.
Уравнение
двумерного
Рейнольдса
турбулентного
обобщенное
на
течения вязкого
случай
стационарного
сжимаемого
смазочного
материала может быть записано в виде:
h3 p h3 p
6 Uh 12V
x K x x z K z z
x
(4.12)
где x и z – координаты развертки опорной поверхности подшипника
(рисунок 4.9); – плотность жидкости; – коэффициент динамической
вязкости жидкости; p – давление; Kx и Kz – коэффициенты турбулентности
в направлениях x и z соответственно; U и V – проекции вектора скорости
жидкости на поверхности цапфы ротора в направлениях x и z
соответственно; h – функция радиального зазора.
63
а)
б)
Рисунок 4.9 – Расчетная схема подшипника с точечными (а) и
прямоугольными (б) камерами
При перекосе оси ротора (рисунок 10) введем в рассмотрение два
угла X и Y. Учитывая малость этих углов, ограниченных перемещением
в малом радиальном зазоре, функцию радиального зазора можно записать
в виде:
h h0 X 0 zY cos
2x
2x
Y0 z X sin ,
D
D
(4.13)
где h0 – номинальный радиальный зазор, то есть зазор при концентричном
положении цапфы; D – диаметр втулки подшипника; X0 и Y0 – координаты
центра цапфы в системе ОXYZ, жестко связанной с центральной осью
втулки.
64
Рисунок 4.10 – Функция радиального зазора
Значения скоростей U и V на поверхности цапфы находятся по
следующим зависимостям при рассмотрении движения ротора:
D
2x
2x
X 0 zY sin
Y0 z X cos ;
2
D
D
2x
2x
V X 0 zY cos Y0 z X sin ,
D
D
U
(4.14)
где – угловая скорость вращения ротора; X 0 и Y0 – скорости центра
цапфы в системе ОXYZ Y и X – скорости малых углов поворота.
Для рассматриваемых подшипников жидкостного трения характерно
наличие как сдвиговых, так и напорных течений в радиальном зазоре.
Поэтому для расчета коэффициентов турбулентности удобно применить
методику, предложенную А.И. Поддубным. Которая хорошо коррелирует
как, с другими известными способами определения коэффициентов
турбулентности, так и с экспериментальными данными, и к тому же
применима практическим к любым условиям течения смазочного материала.
Данный подход основан на нахождении в каждой точке развертки
подшипника локальных чисел Рейнольдса и сравнении их с критическими
значениями (Reкр):
65
1
1
, Res Rexкр
, Res Rezкр
0 ,75
K x Re 0 ,75
K
;
,
Res
z
кр
кр
s
кр , Res Rex
кр , Res Rez
Re
x
Rez
(4.15)
Re
3
где Res Re2 Re2p ; Rezкр 2038 ; Rexкр Rezкр 1 sin2 arctg ;
Re
4
p
Rep Rex2 Rez2 .
Для решения уравнения Рейнольдса (4.12) необходимо задать как
минимум по два граничных условия по координатам x и z. За которые
необходимо принять известные давления (и их производные) на границе и
внутри расчетной области, то есть развертки подшипника, таким образом
можно записать следующие группы граничных условий:
1) заданные давления на торцах подшипника и давление в и давление
источников внутри расчетной области (давление питающих камер):
p z 0 p0 x ; p z L pL x ; p xchi , zchi pchi ; i 1,N ,
(4.16)
здесь L – длина подшипника; xchi и zchi координаты камеры; i – номер
камеры N – число камер;
2) условия по координате x запишем, исходя из гипотезы
Зоммерфельда, согласно которой опорная поверхность ротора полностью
охвачена смазочным слоем. Тогда можно записать условия сопряжения:
p x 0 p x D ;
p
x
x 0
p
x
,
(4.17)
x D
3) в реальных подшипниках давления в около торцов, меняются мало
по сравнению с их градиентом в области радиального зазора, поэтому
можно записать следующие добавочные граничные условия для давлений
на торцах:
p
z
n 0;
z 0
p
z
n0
(4.18)
zL
66
Как уже отмечалось выше для задания граничных условий данных
типов подшипников необходимо знать давления и температуры в камерах.
давление в камерах ищется на основании баланса расходов. Это уравнение
выражает равенство массовых расходов смазочного материала через жиклер
и контур, расположенный вокруг питающей камеры, и имеет вид:
Qch Qx Qz Qy .
(4.19)
Массовые расходы, входящие в (4.19), имеют следующий смысл:
1) Qch– массовый расход смазочного материала через дросселирующее
устройство (жиклер), определяемый по формуле аналогично:
Qch
pin pch ch 0 ;
128l j
K ch ch 0
d 4j
(4.20)
p
где dj и lj – диаметр и длина жиклера; ch и ch – вязкость и плотность
жидкости в камере; K chp – обобщенный коэффициент, учитывающий
влияние турбулентности потока и местных сопротивлений на пропускную
способность жиклера с острыми входными кромками, определяемый в
соответствии с критическим числом Рейнольдса (Re=1300):
K chp
Re
*
Re
0,75
1,5 Red j
; Re
64l j
v j d jch
ch
; vj j
2 pin pch
,
ch
(4.21)
где j=0,82 – коэффициент скорости для входа в жиклер.
2) Qx и Qz – массовые расходы смазочного материала в окружном и
осевом
направлениях
обусловленные
через
вращением
контур
цапфы
вокруг
и
питающей
градиентом
камеры,
давлений
в
соответствующих направлениях и определяемые по соотношениям:
Uh
Uh
h3 p
h3 p
dz;
Qx
2
12
K
x
2
12
K
x
x
x
x x2 x
x x1 x
z1 z
z2 z
Qz
h p
12K z z
x1 x
x2 x
3
z z2 z
h p
12K z z
3
67
dx,
z z2 z
(4.22)
где x и z – окрестности, ограничивающие заданный контур; для точечных
камер (рисунок 4.11) для пределов нужно учесть, что x1=x2 и z1=z2.
z
z
z
z
z2
x
pch
z1
L
L
x
pch
z1
x1
x
x1
а)
x2
x
б)
Рисунок 11 – К расчету давлений в камерах: а) точечных; б) прямоугольных
3) Qy – массовый расход, обусловленный радиальным перемещением
цапфы, когда проявляются эффекты всасывания и сдавливания смазочной
пленки, для точечных и прямоугольных камер соответственно равный:
Qy chV
d 2j
4
и Qy Vdxdz ,
(4.23)
Sch
где Sch – площадь поверхности прямоугольной камеры.
Решение уравнения (4.19) позволяет определить давление pch в камерах,
используемое в граничном условии (4.16) для уравнения Рейнольдса.
Нахождения поля давления p(x,z) в подшипнике служит основой для
определения интегральных динамических характеристик подшипника, а
именно реакций RX и RY смазочного слоя в направлениях X и Y и реактивных
моментов M X c и M Yc относительно осей Xc и Yc, проходящих через
центральное поперечное сечение подшипника и параллельных глобальной
системе координат OXYZ (ось Z одинакова для систем OXYZ и OXсYсZ). Эти
величины могут быть определены по следующим зависимостям:
L D
2x
dxdz ;
D
(4.24)
2x
dxdz ;
D
(4.25)
RX p x,z cos
0 0
L D
RY p x,z sin
0 0
68
L D
L
2x
M X c z p x,z sin dxdz ;
2
D
0 0
(4.26)
L D
L
2x
M Yc z p x,z cos dxdz .
2
D
0 0
(4.27)
Для расчета поля давлений был использован метод конечных
элементов. Запишем уравнение Рейнольдса (4.12) в виде
p p
Ax
Az
F,
x x z z
(4.28)
h3
h3
где Ax
; Az
; F 6 Uh 12V .
x
K x
K z
Согласно методу взвешенных невязок составим аппроксимацию
неизвестной функции p в виде (Nn – число узлов):
Nn
p p = p j N j .
(4.29)
j =1
Используя слабую формулировку метода взвешенных невязок и метод
Галеркина, запишем уравнение невязок для (4.28) в виде:
p p
N
A
A
F
i
x
z
x x z z d = 0 ,
(4.30)
где – расчетная область.
Для
снижения
требований
к
гладкости
базисных
функций
проинтегрируем по частям слагаемые, содержащие вторые производные (по
формуле Грина):
p p
Az d =
x z z
Ax N i p Az N i p
p
p
N i Ax nx Az nz d
+
d.
z
x
x
z
z
x
N x A
i
x
Здесь – граница расчетной области; nx и nz – направляющие косинусы
внешней нормали к границе . Из граничных условий для подшипника,
описанных выше (постоянство давления на торцах и неразрывность
69
смазочного слоя; если имеет место разрыв, то условия на границах разрыва
аналогичны условиям на торцах) следует:
Ni Ax
nx Az
nz d 0 .
x
z
Тогда уравнение (4.30) примет следующий вид:
Ax N i p Az N i p
F d 0.
x x
z
z
(4.31)
Граничные условия в дальнейшем будут тождественно выполнены.
Подставляя в полученное уравнение аппроксимацию (4.29), получим:
K p = f .
Глобальные матрица [K] и вектор {f} для конечного элемента имеют
вид:
Ax Ni p Az Ni p
Kije = e
d ;
x
x
z
z
fi e = e FNi d .
Геометрия и тип конечных элементов могут быть разными , определяя
значения коэффициентов в [K] и {f}. Для четырехугольного элемента с
узлами i, j, k, l (рисунок 12) локальные матрица [ke] и вектор {fe} имеют вид
(с учетом постоянства коэффициентов Ax, Az и F в пределах элемента):
N N n
N N n
e
kmn
e Axe m
Aze m
d ;
x x
z z
e
f mn
e F e Nmd ; m, n = i, j, k ,l .
(4.32)
(4.33)
70
Рисунок 4.12 – Четырехугольный четырехузловой конечный элемент
Введем в рассмотрение две безразмерные координаты (x) и (z):
x
2 x xc
2 z zc
; z
,
be
he
(4.34)
где xc и zc – координаты центра элемента; be и he – размеры элемента по осям
x и z, соответственно.
Базисные функции такого элемента имеют следующий вид:
N1e =
1
1
1 x 1 z ; N2e = 1 x 1 z
4
4
N3e =
1
1
1 x 1 z ; N4e = 1 x 1 z
4
4
Тогда элементы матрицы k e и вектора
f
e
можно определить по
следующим соотношениям :
Axe he 2 Aze be 2
e 2
e 2
1 Ax he 0,5 Az be
k e
3be he 0,5 Axe he 2 Aze be 2
e 2
e 2
0,5 Ax he 0,5 Az be
Axe he 2 0,5 Aze be 2
0,5 Axe he 2 Azebe 2
Axe he 2 Aze be 2
0,5 Axe he 2 0,5 Azebe 2
0,5 Axe he 2 0,5 Aze be 2
Axe he 2 Azebe 2
0,5 A h A b
Axe he 2 0,5 Azebe 2
e 2
x e
e 2
z e
0,5 Axe he 2 0,5 Azebe 2
0,5 Axe he 2 Azebe 2
;
Axe he 2 0,5 Aze be 2
Axe he 2 Azebe 2
Fe
be he F e
e
f
4 Fe .
e
F
Описанная методика решения задачи была реализован в среде Matlab.
Были написаны исполняемые файлы на языке Matlab, позволяющие создать
71
параметрическую модель подшипника, рассчитать поле давлений (рисунок
4.13), а также определить реакции подшипника.
Рисунок 4.13 – Эпюры давлений
Приведенные выше соотношения (4.27) – (4.34) образуют нелинейную
модель радиального подшипника жидкостного трения. Теперь как это
делалось и для АМП линеаризуем эти реакции. При статическом
нагружении ротора цапфа занимает некоторое статическое положение во
втулке подшипника полностью описываемое четырьмя параметрами (X0, Y0,
X, Y). При этом в подшипнике возникают реакции смазочного слоя ( RX 0 ,
RY0 , M X c 0 , M Yc 0 ), которые полностью уравновешивают внешние нагрузки,
приходящиеся на подшипник. Таким образом, ротор занимает положение
статического равновесия, задача по его отысканию будет рассмотрена далее.
Если теперь под влиянием внешнего воздействия цапфа ротора сместится из
положения подвижного равновесия на величины Х, Y, X и Y
соответственно, а изменения скорости составят X , Y , X и Y , то в
новом положении на опорную поверхность ротора будут действовать вновь
возникшие
дополнительные
реакции
смазочного
слоя,
являющиеся
функциями перемещений и скоростей центра цапфы: RX RX X ,Y ,X ,Y ,
RY RY X ,Y ,X ,Y ,
M Yc M Yc X ,Y , X ,Y .
M X c M X c X ,Y , X ,Y
Линеаризуем,
в
предположении
и
малости
смещений Х, Y, X и Y от положения равновесия и скоростей X , Y ,
72
X и Y , реакции RX и RY и моменты M X c и M Yc , основываясь на
разложении в ряд Тейлора в окрестности стационарного положения (X0, Y0,
X, Y) и ограничивая членами первого порядка малости:
R X
R
R
RX
Y X X X Y ...
X
X 0
Y 0
X 0
Y 0
RX RX 0
RY
RY
RY
RY
Y
X
Y ...
X
Y 0
X 0
Y 0
X 0
RY RY0
M X c
M X c
X
Y
X 0
M Xc M Xc0
M Yc
X
M Yc M Yc 0
M X c
Y
0
X
M Yc
M Yc
X
Y
Y 0
X
0
M X c
X
0
Y
Y ...
0
M Yc
X
Y ...
0
Y 0
Введем обозначения:
R
k XX X
X
R
bXX X
X
RX
RY
RY
; k XY
; kYX
; kYY
;
Y
X
Y
0
0
0
0
RX
RY
RY
; bXY
; bYX
; bYY
;
0
Y 0
X 0
Y 0
M X c
M X c
M Yc
M Yc
XX
;
;
;
;
XY
YX
YY
X 0
Y 0
X 0
Y 0
M X c
M X c
M Yc
M Yc
XX
; XY
; YX
; YY
.
X 0
Y 0
X 0
Y 0
В таком случае выражения для реакций и моментов смазочного слоя,
действующих после малых возмущений координат и скоростей, примут вид:
RX RX 0 k XX X k XY Y bXX X bXY Y ;
RY RY0 kYX X kYY Y bYX X bYY Y ;
M X c M X c 0 XX X XY Y XX X XY Y ;
M Yc M Yc 0 YX X YY Y YX X YY Y .
Далее определив переменные проектирования, введя на некоторые
известные конструктивные параметры, необходимо провести анализ
чувствительности рассмотренных выше линеаризованных реакций к
73
изменению параметров проектирования, как это сделано, например в [5].
Затем по результатам анализа чувствительности необходимо построить
критерии оптимальности и штрафные функции, сформулировав тем самым
задачу о поиске оптимальных значений параметров проектирования.
Методика оптимального проектирования системы управления
Рассматриваемы системы управления сводятся, как было сказано выше,
к ПД, ПИД и ПИДДТ-регуляторам, Такие системы могут быть в общем виде
описаны следующей матричной системой в пространстве параметров x, y, u:
x Ax Bu;
y Cx.
(4.35)
Оптимальное управление u0 для таких систем определяется следующим
выражением:
1
u 0 BT Px ,
(36)
где – положительный весовой скаляр; P – симметричная матрица,
являющаяся
единственным
положительно
определенным
решением
алгебраического матричного уравнения Лурье – Риккати:
1
CC T AT P PA PBBT P 0 .
(4.37)
Определение u0 в общем виде для всех возможных типов регуляторов
крайне затруднительно в аналитическом виде, однако для конкрентных
систем с заданными параметрами задача не представляется сложной при
использовании численных методов.
При этом следует помнить, что коэффициенты матриц A, B и C ,
входящих
в
(4.35)
–
(4.37),
являются
функциями
коэффициентов
линеаризованных реакций подшипника. Поэтому рассмотрение задачи о
нахождении
оптимальных
параметров
системы
управления,
нельзя
рассматривать отдельно от задачи определения оптимальных параметров
исполнительной системы. При оптимальном проектировании мехатронных
74
опор необходимо организовывать итерационный процесс между двумя
уровнями проектирования до тех пор пока на текущем итерации отклонение
критериев оптимальности на каждом уровне будет удовлетворительно
малым по отношению к критериям оптимальности, полученным на
предыдущей итерации.
75
ЗАКЛЮЧЕНИЕ
В результате выполнения этапа проекта были разработаны новые
конструкции мехатронных подшипников, проведены проектировочные
расчеты роторно-опорного узла с мехатронным подшипником и подобраны
элементы
контрольно-измерительной
дальнейшем
экспериментальных
системы
для
исследований.
проведения
Можно
в
выделить
следующие результаты проекта:
1)
разработаны принципиально новые конструкции мехатронных
подшипников, основанные на синергетической интеграции механических,
электронных и контрольно-измерительных компонентов в опорном узле;
2) проведены проектировочные расчеты рабочих характеристик
разработанных
подшипниковых
математических
моделей
и
узлов,
специализированных
позволившие оценить
требуемые
параметры
узлов
опорных
полученные
с
САЕ-систем
геометрические и
для
проведения
помощью
и
конструктивные
экспериментальных
исследований, а также параметры быстродействия и разрядности элементов
контрольно-измерительной системы;
3) разработанны и подобранны программно-аппаратные средства для
реализации информационно-измерительной системы по управлению и
контролю
мехатронными
достижениях
в
подшипниками,
области
основанные на
автоматического
управления
последних
техническими
системами;
4) подготовлена документация для патентования разработанных
конструкций мехатронных подшипников, выполненная в соответствие с
требованиями патентного законодательства РФ;
5)
разработаны
мехатронных
инструмент
алгоритмы
подшипников,
получения
оптимального
позволившие
наилучших
проектирования
получить
характеристик
математический
работоспособности
опорного узла за счет варьирования параметрами механической и
контрольно-измерительной частей мехатронного подшипника.
76
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1 Миндлер Я.З. Логика конструирования. − М.: Машиностроение,
1969 г.
2 Егоров О.Д., Подураев Ю.В. Мехатронные модули. Расчет и
конструирование: Учебное пособие. − М.: МГТУ «СТАНКИН», 2004. − 360
с.: ил.
3 Хорошев
А.Н.
Введение
в
управление
проектированием
механических систем: Учебное пособие. 1999, 372 с.
4 Патент РФ № 2398112. Мехатронный подшипник скольжения
опора / Савин Л.А., Поляков Р.Н. // Опубл. БИ №24, 2010 г.
Зарегистрировано в Государственном реестре изобретений РФ 27.08.2010 г.
Патентообладатель: Орловский государственный технический университет.
5 A.O. Pugachev, V.V. Tykhomirov, A.V. Sheremetyev, et. Sensitivity
analysis of sqeeze film dampers using Reynolds equation. The 8 th IFToMM
International Conference on Rotor Dynamics. KIST/Seoul, Korea, 2010 – 454462pp.
77
Приложение А
Описание конструкций мехатронных подшипников,
подготовленных к патентованию
78
F16C 32/06
МЕХАТРОННАЯ ГИДРОСТАТИЧЕСКАЯ ОПОРА
Изобретение относится к области машиностроения и может быть
использовано в роторных машинах, к которым предъявляются повышенные
требования по надежности опорного узла.
Наиболее близким решением к заявляемому изобретению является
гидростатическая опора, содержащая корпус, в котором установлена втулка
опоры, снабженная подвижными жиклерами, которые могут перемещаться в
радиальном направлении под действием переменного давления в смазочном
слое, вследствие радиальных колебаний вала (см. патент РФ № 2247877,
МПК F16C 32/06, опубл. 2005 г.].
Недостатком такой гидростатической опоры является то, что
адаптивные элементы − жиклеры, подвешенные на пружинах, представляют
собой механические детали, сложные в изготовлении, а их быстродействие и
срок службы зависит от характеристик и качества материала, из которого
они изготовлены.
Задача, на решение которой направлено изобретение, состоит в
повышении надежности системы “ротор – опоры” путем контроля и
управления
процессами,
происходящими
в
смазочном
слое
гидростатической опоры. Поставленная задача достигается тем, что в
гидростатической опоре, содержащем вал, корпус и устройства подачи
смазочного материала, в отличие от прототипа в корпусе размещены
датчики давления, соединенные с блоком управления.
79
Сущность изобретения поясняется чертежом, на котором изображена
мехатронная гидростатическая опора.
Мехатронная
гидростатическая
опора
состоит
из
вала
1,
установленного в корпусе подшипника 2, в корпусе закреплены датчики
давления 3, подача смазочного материала в зазор гидростатической опоры
осуществляется устройствами подачи смазки 4.
Устройство
работает
следующим
образом:
возникающие
при
вращении вала 1 радиальные колебания вызывают локальные зоны с
повышенным давлением в слое смазки гидростатической опоры, значение
которого регистрируется датчиками давления 3. Сигнал с датчиков
поступает в блок управления, который после обработки информации выдает
необходимые управляющие воздействия на устройства подачи смазки,
чтобы уменьшить колебания вала. Расчет управляющего воздействия
производится по алгоритму в зависимости от рабочих параметров системы
«ротор – опоры».
Предлагаемое изобретение позволит значительно уменьшить риск
возникновения внезапного отказа системы «ротор-опоры», тем самым,
повысить ее надежность за счет контроля рабочих параметров в смазочном
слое подшипника в режиме реального времени.
ФОРМУЛА ИЗОБРЕТЕНИЯ
Гидростатическая опора, содержащая вал, корпус и устройства подачи
смазочного материала, отличающаяся тем, что в корпусе размещены
датчики давления, соединенные с блоком управления.
80
МЕХАТРОННАЯ ГИДРОСТАТИЧЕСКАЯ ОПОРА
Заявитель
Федеральное государственное образовательное
учреждение высшего профессионального
образования «Государственный университет –
учебно-научно-производственный
комплекс»
(ФГОУ ВПО «Госуниверситет – УНПК»)
81