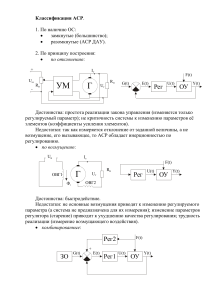
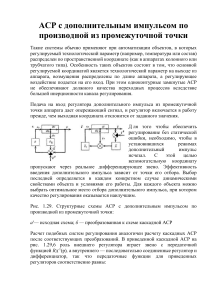
Введение. Предметом дисциплины «Управление техническими системами» является изучение основ теории автоматического управления, общих принципов построения систем управления техническими средствами, основные режимы их работы и способы настройки. В настоящее время, в условиях широкого внедрения средств автоматизации на судах, изучение основ теории автоматического управления является необходимым для инженера – механика, так как автоматические устройства входят в состав большинства технических средств, находящихся в заведовании судового инженера - механика. Без знания принципов работы систем управления невозможно обеспечить должный уровень их эксплуатации. Изучение дисциплины позволит, в дальнейшем, перейти к более специальным и сложным курсам, таким как «Автоматизация СЭУ». Цель автоматизации на морских судах – облегчение труда и повышение его производительности, совершенствование форм организации труда; улучшение эксплуатационных характеристик судна; увеличение периода между ремонтами и профилактическими осмотрами оборудования; уменьшение возможности аварий вследствие улучшения контроля за работой оборудования и автоматизация управления его работой; быстрое принятие решений в аварийных ситуациях; сокращение численности экипажа. Народнохозяйственное значение автоматизации технологических процессов трудно переоценить. Автоматическое управление процессами позволяет добиться существенной экономии энергии, материалов, уменьшения износа оборудования. Сокращение численности обслуживающего персонала также снижает эксплуатационные затраты. Поддержание оптимальных режимов работы снижает отрицательное влияние промышленного производства на экологическую обстановку, кроме того, внедрение средств автоматизации позволяет изменить ход процесса и избегать образования вредных веществ при достижении заданного качества конечного продукта. Вместе с этими очевидными выгодами автоматизация технологических процессов создаёт и ряд достаточно серьёзных проблем. Так сокращение необходимой численности обслуживающего персонала ставит задачу разумного перераспределения кадров. В то же самое время для обслуживания АСУ ТП необходим высоко квалифицированный персонал, а, следовательно, необходимо позаботиться об образовании и переподготовке. Разработка и внедрение современных средств автоматизации – процесс чрезвычайно наукоёмкий, следовательно, поддержание высокого уровня научной базы – важнейшее условие дальнейшего развития. Автоматика, как отрасль человеческой деятельности имеет длинную историю. Создание автоматических устройств относится к глубокой древности. Древнегреческий учёный Герон Александрийский, живший в I веке, впервые описывает автоматы, которые без вмешательства человека могли выполнять предписанные им действия (продавать "святую" воду, открывать двери храма). Сильный толчок развитию автоматики дало усовершенствование часового механизма, так одним из первых автоматов промышленного назначения был разработанный Х. Гюйгенсом в середине XVII века регулятор хода часов. Примерно к тому же времени относится и создание кукол – андроидов, развлекавших французский двор. В XVIII веке И. И. Ползунов и Д. Уатт одновременно с конструкцией паровой машины предложили и ряд автоматических устройств, в частности, центробежный регулятор частоты вращения. Сама идея этого регулятора пережила века и активно используется до сих пор в основе современных регуляторов частоты вращения. Дальнейшее развитие автоматики было связано с целым рядом трудов русских и зарубежных учёных, работавших как в области автоматики, так и в смежных областях (теплотехника, электротехника и электроника, вычислительная техника и кибернетика и другие). Так, в 1854 г. русский инженер К. И. Константинов предложил электромагнитный автоматический регулятор частоты вращения вала электродвигателя, а уже в 1886 г. изобретатель А. И. Шпаковский создаёт регулятор подачи топлива в топку котла в зависимости от давления пара. Вопросам проектирования, создания и эксплуатации регуляторов посвящена книга К. Максвелла, вышедшая в 1868 г. Развитие автоматизации судов можно разделить на 3 этапа. Первый этап автоматизации, охватывающий период примерно до 1980 г., характеризуется внедрением автоматических систем управления, регулирования, контроля и защиты в объёме, соответствующем знакам автоматизации А2 и А1. Резко уменьшаются трудозатраты на процессы управления, контроля и обслуживания, значительно сокращается штат судна. На втором этапе автоматизации (1980 – 1990 гг.) на судах появляются более сложные системы управления и контроля, автоматизированные системы технического диагностирования, создаются предпосылки перехода от регламентного обслуживания к обслуживанию по фактическому состоянию. Третий этап автоматизации (с начала 1990-х) характеризуется созданием интегрированных систем автоматизации управления в масштабе судна, связывающих в единое целое основные группы судовых технологических процессов: судовождение, связь, эксплуатацию энергетических установок, грузовые и швартовые операции. Такие системы управления (СУ) создаются на базе бортовых вычислительных комплексов. Дальнейшие перспективы развития средств автоматизации состоят в дальнейшем усложнении комплексных систем управления, расширении функций самодиагностики, совершенствовании средств связи с пользователем, внедрение интеллектуальных информационно – советующих систем управления. Символ класса судна КМ - самоходные суда, построенные под наблюдением Регистра и КМ - под наблюдением другого регистра. Правилами Регистра определены следующие классы автоматизации судов: А1 – объём автоматизации механической установки судов, кроме пассажирских и судов специального назначения (со спец. экипажем более 200 человек), позволяющий эксплуатацию механической установки без постоянного присутствия персонала в МО и ЦПУ. А2 – эксплуатация механической установки одним оператором из ЦПУ, без постоянного присутствия персонала в МО. А3 – объём автоматизации судов с мощностью главных механизмов до 2250 кВт, но эксплуатацию без постоянного обслуживания в МО. Различают 3 уровня управления и контроля: Локальные СУ (нижний уровень) осуществляет непосредственное управление судовыми ТС и их отдельными устройствами. Обеспечивает возможность протекания физических процессов, безаварийного функционирования, диагности- рования средств автоматизации, осуществляет местное управление, отработку команд верхних уровней и выдачу наверх обобщённой информации о техническом состоянии оборудования. Групповые СУ осуществляют согласованное взаимодействие между локальными и координирующими системами, а также согласованное взаимодействие функциональных комплексов судовых ТС предназначенных для выполнения общей технической задачи (ДАУ, СУСЭС, СУРУ). Координирующие системы осуществляют координацию работы групповых СУ комплексами ТС судна (управление судном во время лова – ДАУ ГД, СУ СЭС, СУ траловыми лебёдками). Основы автоматики. Основные понятия и определения. Алгоритм функционирования – совокупность предписаний, направленных на качественное выполнение технического процесса в каком – либо устройстве или системе. В общем случае алгоритм функционирования является составным и реализует задачи управления, контроля, диагностирования, защиты и др. Алгоритм управления – это совокупность предписаний, определяющих характер воздействия на процесс с целью выполнения им заданного алгоритма функционирования. Управление – это процесс осуществления воздействии, соответствующих алгоритму управления. Автоматическое управление – это управление, осуществляемое без непосредственного участия человека (за исключением простейших операций включения и др.). Автоматическое регулирование – разновидность автоматического управления. Оно обеспечивает поддержание постоянства некоторой регулируемой величины, характеризующей, технологический процесс, или же изменение её по заданному закону, осуществляемое посредством изменения состояния регулируемого объекта. Автоматическая система управления (регулирования) АСУ (АСР) – система, реализующая автоматическое управление (регулирование). В АСР входят объект управления (ОУ) и управляющее устройство (УУ). ОУ – устройство или их совокупность, осуществляющая технический процесс в соответствии с алгоритмом функционирования, технологический процесс или их набор, подчинённый одной цели управления (судно, ДТП, паровой котёл, дизель, ДГ, вспомогательные механизмы и так далее). Любое управление состоит из трёх частей: 1. Сбор информации об ОУ посредством датчиков, установленных на нём; 2. Обработка собранной информации по заданному алгоритму управления в УУ; 3. Выдача управляющего воздействия на ОУ посредством исполнительных механизмов и регулирующих органов. К элементам АСР прикладываются различные воздействия – внутренние и внешние. К внутренним относят управление U(t), внешние же поступают из вне и делятся на задающие и возмущающие. Задающие воздействие прикладывается к АСР и определяет цель её работы (заданная частота вращения для двигателей, заданная температура для холодильных установок и так далее). Обычно обозначается G(t). Возмущающее воздействие, как правило препятствует достижению заданной цели в АСР. Например, расход пара для котла, момент сопротивления на валу дизеля. Обозначается F(t). Выходной параметр ОУ, определяющий цель АСР, называется регулируемым и обозначается Y(t). Уместно привести одну из наиболее простых и вместе с тем основополагающих формул автоматики: G(t) – Y(t) = E(t) (1), где E(t)- ошибка регулирования или рассогласование – разность между задающим воздействием и регулируемым параметром. G(t) E(t) Y(t) G(t) E(t) или G(t) E(t) такой элемент называется элементом сравнения Y(t) такой элемент называется сумматором.. + Y(t) Формула (1) при этом примет вид: G(t) + Y(t) = E(t) (2). На элемент сравнения поступает два сигнала – заданное значение и выходной сигнал ОУ. Последний называется сигналом обратной связи (ОС). В зависимости от знака, ОС могут быть положительными или отрицательными. ОС называется передача сигнала с выхода элемента на его вход и это понятие общее не только для информатики, но и электроники, технической диагностики и так далее. Основной вид ОС, применяемых в автоматике – отрицательные ОС. Понятие ОС является в автоматике одним из основополагающих. Действительно, у УУ есть информация о заданном значении, но также необходимо знать: достигнуто ли оно. В противном случае заданное значение так и не будет достигнуто – управляющее устройство будет выдавать сигнал управления больший или меньший необходимого. Что же такое управляющее устройство? Состоит оно из корректирующего устройства (КУ), обеспечивающего заданный алгоритм управления или функционирования. В зависимости от наличия в УУ усилительного элемента (УЭ) они подразделяются на УУ прямого действия (без УЭ) и непрямого (с УЭ). Так, например, рассмотренные нами ранее регуляторы относятся к УУ прямого действия, они не используют подвода энергии из вне и довольствуются той, что поступает с датчика. Следует отметить, что большинство используемых усилительных устройств, являются УУ непрямого действия. Это объясняется и сложностью ОУ, протяжённостью АСР в пространстве, так и сложностью алгоритмов управления. С целью формализации знаний АСР представляется в виде схем: 1. Принципиальных (электрических, гидравлических, пневматических); 2. Функциональных; 3. Структурных. Принципиальная электрическая схема. + Uоп - UВ Uпит Rз Uз УМ ОВМ Rв M + ОВГ Г Iв UГ - Рассмотрим принцип работы этой СУ или АСР. Задающее значение подаётся с потенциометра R3 и на входе магнитного усилителя УМ сравнивается с напряжением генератора Uг по формуле: Ue = Uз – Uг Напряжение рассогласования усиливается УМ и приводит во вращение двигатель М, перемещающий реостат возбуждения Rв. При этом изменяется ток возбуждения генератора Uг. Двигатель М вращается пока Ue 0 в сторону, определяемую знаком Ue. Когда же Ue = 0, то двигатель стоит, а процесс управления считается законченным. Цель рассмотренной АСР – стабилизация напряжения Uг. Функциональная схема. F(t) ЗО G(t) E(t) Рег U(t) ИМ X(t) РО t) ОУ Y(t) ЧЭ Каждому элементу принципиальной схемы соответствует блок, имеющий вход и выход. Вход и выход представлены обобщёнными физическими величинами. РО – регулирующий орган – входит в состав ОУ (реостат с ОВГ); ИМ – исполнительный механизм (двигатель М) - приводит к изменению положения регулирующего органа ОУ; РЕГ – регулятор (УМ); ЗУ – задающее устройство (потенциометр Rз). ЧЭ – чувствительный элемент, датчик (в данной системе специализированное устройство отсутствует). Структурная схема. Отличается от функциональной схемы тем, что внутри блоков содержатся передаточные функции, характеризующие динамические свойства соответствующего элемента. Свойства ОУ. Рассмотрим простейшую САР. 2 5 1 1. Подвижная опора для изменения КУ регулятора; 2. Рычаг регулятора; 3. Приспособление для изменения задания регулируемой величины; 4. ЧЭ, контроль за управляющим и возмущающим воздействием; 5. РО, задвижка; 6. Задвижка нагрузки. 3 W1 4 6 H W2 ОУ – открытый бак со свободным сливом и задвижками 5 и 6. Автоматический регулятор состоит из поплавка, рычажной системы (2,3), передающей перемещение поплавка задвижке 5 и подвижной опоры 1. Регулируемая величина – уровень в баке "Н". Цель регулирования – сохранять уровень в баке в пределах Нmin – Нmax. Пусть вода откачивается насосом, производительность которого не зависит от Н. Уровень будет постоянным при (3) W10 Wo 0 При нарушении равенства (3) уровень будет изменяться. Изменение элементарного V бака dН равно разбалансу прихода и расхода за dt SdH (W1 W2 )dt или S dH W1 W2 dt (4) Вычитая почленно (3) из (4), получим: dH W1 W2 dt W1 W1 W10 и W2 W2 W20 S (5) 3 W1 W1 W1,W2 м /с W 2 W2 DH t,c S,м H Н ,м 6 W2 t,c Пусть в момент t=0 разность между притоком и расходом уменьшилась скачком на W const . Скорость изменения Н: dH W tg dt S (6) прямо пропорциональна разбалансу W и обратно пропорциональна площади поперечного сечения бака S (определяет инерционные свойства бака). Скорость будет постоянной при постоянном возмущении. 2 W10=W20 м /с m1 W1 W2 W20 dH 2 Q H T,c S,м Н ,м m2 H W2 T,c Как изменятся процессы в баке со свободным сливом жидкости. У такого бака количество W2 зависит и от степени открытия W2, так и от уровня Н, определяющего напор на сливе. Если в t=0 скачком прикрыть W2, то скорость изменения уровня будет определяться (6) только в первый момент, пока возмущение W20 const . С изменением (повышением) уровня, увеличится и количество вытекшей жидкости, а возмущение W2 - непрерывно уменьшаться. Вследствие этого уменьшается и скорость изменения уровня, поэтому уровень будет изменяться по экспоненте. В отличие предыдущего примера в этом случае проявляется свойство ОУ самостоятельно стабилизировать изменение уровня за счёт снижения скорости его изменения. Если бак достаточно высок, то наступит новое равновесие, при котором W2 будет скомпенсирована изменением напора. Свойство ОУ самостоятельно (без регулятора) совершать переход в направлении нового установившегося состояния называется самовыравниванием. Количественной характеристикой этого свойства является коэффициент самовыравнивания: a W k H H (7) W (8)- изменение уровня на единицу возмущения (коэффициент по возмущающему воздействию). Коэффициент усиления уменьшается с уменьшением расхода жидкости, так как с уменьшением уровня его влияние на расход жидкости уменьшается. Самовыравниванием обладают многие ОР (ЭД). Принципиальная схема: 3 От насоса 2 4 5 1 6 Расход 1. Задающее устройство + ЭС (талреп); 2. Регулятор (усилитель) (золотник); 3. Исполнительный механизм (сервопоршень); 4. Регулирующий орган (заслонка); 5. Объект управления (бак); 6. Чувствительный элемент (поплавок).