Федотов Н.Г., Сёмов А.А. Идеи построения равномерной сетки на сфере... преобразование. // Проблемы информатики в образовании, управлении, экономике и техни-
advertisement

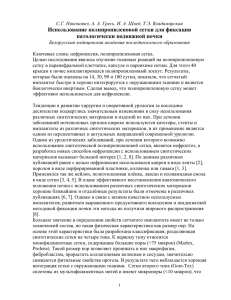
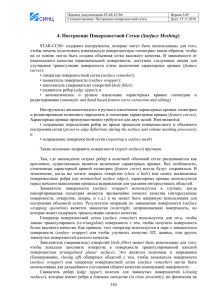
Федотов Н.Г., Сёмов А.А. Идеи построения равномерной сетки на сфере и 3D трейспреобразование. // Проблемы информатики в образовании, управлении, экономике и технике: Сб. статей XIII Междунар. научно-техн. конф. – Пенза: ПДЗ, 2013. – С. 23-26. ИДЕИ ПОСТРОЕНИЯ РАВНОМЕРНОЙ СЕТКИ НА СФЕРЕ И 3D ТРЕЙС-ПРЕОБРАЗОВАНИЕ* Н.Г. Федотов, А.А. Сёмов Пензенский государственный университет, г. Пенза, Россия, nikolayfedotov@mail.ru, T_pmd3c@mail.ru Рассматривается новый подход сканирования пространственных объектов. Описывается условие инвариантности получаемых признаков к повороту – построение равномерной сетки на сфере. Fedotov N. G., Syomov A.A. Ideas of creation the uniform grid on the sphere and trace-3D conversion. New approach of scanning of spatial objects is considered. The condition of invariance of received signs to turn – creation of a uniform grid on the sphere is described. Пусть F – исходная трёхмерная модель. Определим плоскость П(η, r) как касательную к сфере с центром в начале координат и на расстоянии r от центра сферы с углами ω и φ, где η = [cosφ sinω, sinφ sinω, cosω] – единичный вектор в R3, ω – угол между П(η, r) и ОXY, φ – угол между П(η, r) и ОXZ. Сканирование модели F производиться сеткой параллельных плоскостей с расстоянием Δh между ними и углами ω и φ. Взаимное положение 3D объекта F и каждой сканирующей параллельной плоскости П(η(ω,φ),r) характеризуют числом: G=HyperТ(F∩П(η(ω,φ),r)). Данное сканирование производится для всех углов ω+Δω и φ+Δφ с оборотом обхода объекта F в π радиан с тем же шагом Δh между сканирующими плоскостями. Результат вычислений HyperТфункционала зависит от трёх параметров плоскости (r,ω,φ). Поэтому результат 3D трейс-преобразования удобно представить в виде трёхмерной гипертрейсматрицы, у которой ось 0ω направлена горизонтально, ось 0φ – вертикально, ось 0r – вглубь. Далее, используя три гиперфункционала (HyperP, HyperΩ, HyperΘ), поочерёдно обрабатываются глубинные, вертикальные и горизонтальные строки матрицы, уменьшая с каждым шагом размерность матрицы на единицу. Это приводит к появлению некоторого признака Res(F) исходной модели: Res(F) = HyperΘ º HyperΩ º HyperP º HyperT(Fsect). Для извлечения признаков фигур, получившихся в сечении плоскостями (или проекций в зависимости от выбора гиперфункционала HyperT) исходной 3D модели, используется 2D трейс-преобразование, введённое и описанное Н.Г. Федотовым [1]. Отметим, что одно из преимуществ разрабатываемого метода состоит в выполнении сканирования и обработки 3D модели в одной технике, что уже на этапе сканирования позволяет формировать признаки исходного объекта. Также необходимо отметить, что углы ω и φ изменяются согласно построению опорной сетки, чтобы плотность плоскостей в пространстве была равномерной. Так, перебор всех углов сетки плоскостей ω и φ в топологическом * Работа выполнена при поддержке гранта РФФИ, проект № 12-07-00501. смысле для непрерывного случая даёт модель концентрических сфер с центром в начале координат. Рассмотрим единичную сферу. Каждой плоскости сопоставим точку её касания с этой сферой. Нужно построить сетку, обладающую равномерным распределением точек на сфере, чтобы плотность плоскостей в пространстве была также равномерной. Это можно сделать, например, с использованием правильных многогранников. Однако их число ограничено (всего пять). Другой способ состоит в применении стохастических методов, добиваясь при этом построения почти равномерной сетки на сфере при большом количестве точек. Так, один из известных алгоритмом данного типа описан в статье [2]. Идея проста: в цикле равновероятно выбираем a и b из интервала (a, b), пока не выполнится условие Sum = a2 + b2 < 1. Затем генерируются точки с декартовыми координатами 2a 1 Sum 2b 1 Sum 1 2 Sum . Существуют также детерминированные методы, которые создают заранее определённую структуру сетки для заданного количества точек, что позволяет при меньшем количестве точек добиваться нужной точности, чем при использовании стохастических методов [3]. Основная идея таких методов заключается в построении некоторой первоначальной сетки (например, вершины икосаэдра), после чего начинается рекурсивное разбиение каждой части (грани) этой сетки. Один из примеров почти равномерного разбиения сферы Для полноты картины стоит отметить, что существует класс оптимизационных задач, которые решаются итерационными методами. Так, например, по сфере случайным образом разбрасываются электронами. Сила взаимодействия между частицами обратно пропорциональна квадрату расстояния между ними, при этом электроны двигаются только по поверхности сферы. Итеративное применение законов Гука-Кулона (по теореме Остроградского–Гаусса) дают приблизительно равномерное распределение электронов на сфере. В завершение стоит подчеркнуть, что благодаря построению данной сетки мы добиваемся выполнения свойства инвариантности к повороту получаемых признаков Res(F). Сейчас авторами статьи ищется наиболее оптимальное построение равномерной сетки на сфере с точки зрения критериев точности и быстродействия. Библиографический список 1. Fedotov N.G. The Theory of Image-Recognition Features Based on Stochastic Geometry // Pattern Recognition and Image Analysis. Advances in Mathematical Theory and Applications. – 1998. – V. 8. – № 2. – P. 264- – 66. 2. Marsaglia G. Choosing a Point from the Surface of a Sphere // Ann. Math. Statist. – 1972. – V. 43. – № 2. – P. 645 – 646. 3. Yershova A., Jain S., LaValle S.M., Mitchell J.C., Generating Uniform Incremental Grids on SO(3) Using the Hopf Fibration // Int. J. Robot. Res. – 2010. – V. 29(7). – №1.– P. 801 – 812.