ЛЕКЦИЯ 1
1. Электронные системы и сигналы. Информационные свойства сигнала.
2. Способы анализа сигнала (временной и спектральный).
3 Регулярные сигналы. Теорема Котельникова.
4. Случайные сигналы (нерегулярные).
5. Преобразование сигналов электронными системами. Линейные и нелинейные аналоговые
преобразования, дискретные и дискретно-аналоговые преобразования.
6. Характеристики линейных систем (АЧХ, ФЧХ, АХ).
7. Характеристики нелинейных систем. Параметрические системы. Электронные системы с
обратной связью.
8. Основные операции, совершаемые над непрерывными и дискретными сигналами: усиление
сигналов, генерирование сигналов заданной формы.
9. Преобразование формы сигналов; преобразование аналоговых сигналов в цифровые и
цифровых – в аналоговые.
10. Математические преобразования в аналоговой или цифровой форме (сложение, умножение,
интегрирование, логарифмирование.
1.1. ОБЩИЕ СВЕДЕНИЯ И ПОНЯТИЯ
Понятие сигнала. В XVIII веке в теорию математики вошло понятие функции, как
определенной зависимости какой-либо величины y от другой величины – независимой
переменной х, с математической записью такой зависимости в виде у(х). Довольно скоро
математика функций стала базовой основой теории всех естественных и технических наук. Особое
значение функциональная математика приобрела в технике связи, где временные функции вида
s(t), v(f) и т.п., используемые для передачи информации, стали называть сигналами.
В технических отраслях знаний термин "сигнал" (signal, от латинского signum – знак) очень
часто используется в широком смысловом диапазоне, без соблюдения строгой терминологии. Под
ним понимают и техническое средство для передачи, обращения и использования информации электрический, магнитный, оптический сигнал; и физический процесс, представляющий собой
материальное воплощение информационного сообщения - изменение какого-либо параметра
носителя информации (напряжения, частоты, мощности электромагнитных колебаний,
интенсивности светового потока и т.п.) во времени, в пространстве или в зависимости от
изменения значений каких-либо других аргументов (независимых переменных); и смысловое
содержание определенного физического состояния или процесса, как, например, сигналы
светофора, звуковые предупреждающие сигналы и т.п. Все эти понятия объединяет конечное
назначение сигналов. Это определенные сведения, сообщения, информация о каких-либо
процессах, состояниях или физических величинах объектов материального мира, выраженные в
форме, удобной для передачи, обработки, хранения и использования этих сведений.
Термин “сигнал” очень часто отождествляют с понятиями “данные” (data) и “информация”
(information). Действительно, эти понятия взаимосвязаны и не существуют одно без другого, но
относятся к разным категориям.
Понятие информации имеет много определений, от наиболее широкого (информация есть
формализованное отражение реального мира) до практического (сведения и данные, являющиеся
объектом хранения, передачи, преобразования, восприятия и управления). В настоящее время
мировая наука все больше склоняется к точке зрения, что информация, наряду с материей и
энергией, принадлежит к фундаментальным философским категориям естествознания и относится
к одному из свойств объективного мира, хотя и несколько специфичному. Что касается
“данных” (от латинского datum – факт), то это совокупность фактов, результатов
наблюдений, измерений о каких-либо объектах, явлениях или процессах материального мира,
представленных в формализованном виде, количественном или качественном. Это не информация,
а только атрибут информации - сырье для получения информации путем соответствующей
обработки и интерпретации (истолкования).
Наука и техника интернациональны, и используют, в основном, общепринятые термины,
большинство из которых англоязычны. Термин "signal" в мировой практике является
общепринятым для характеристики формы представления данных, при которой данные
рассматриваются как результат некоторых измерений объекта исследований в виде
последовательности значений скалярных величин (аналоговых, числовых, графических и пр.) в
зависимости от изменения каких-либо переменных значений (времени, энергии, температуры,
пространственных координат, и пр.). С учетом этого, в дальнейшем под термином “сигнал” в
узком смысле этого слова будем понимать каким-либо образом упорядоченное отображение в
изменении физического состояния какого-либо объекта – материального носителя сигнала,
определенных данных о характере изменения в пространстве, во времени или по любой другой
переменной физических величин, физических свойств или физического состояния объекта
исследований. А так как данные содержат информацию, как об основных целевых параметрах
объекта исследований, так и о различных сопутствующих и мешающих факторах измерений, то в
широком смысле этого слова можно считать, что сигнал является носителем общей измерительной
информации. При этом материальная форма носителей сигналов (механическая, электрическая,
магнитная, акустическая, оптическая и любая другая), равно как и форма отображения в какихлибо физических параметрах или процессах носителей, значения не имеет. Информативным
параметром сигнала может являться любой параметр носителя сигнала, функционально связанный
со значениями информационных данных.
Сигнал, в самом общем смысле, это зависимость одной величины от другой, и с
математической точки зрения представляет собой функцию. Наиболее распространенное
представление сигналов - в электрической форме в виде зависимости напряжения от времени U(t).
Так, например, сигнал изменения напряженности магнитного поля по профилю аэросъемки – это и
временная последовательность изменения электрического напряжения на выходе датчика
аэромагнитометра, и запись этого напряжения на ленте регистратора, и последовательные
значения цифровых отсчетов при обработке лент регистратора и вводе сигнала в ЭВМ.
Рис. 1.1.1. Сигнал.
Сигнал - это информационная функция, несущая сообщение о физических свойствах,
состоянии или поведении какой-либо физической системы, объекта или среды, а целью
обработки сигналов можно считать извлечение определенных информационных сведений,
которые отображены в этих сигналах (кратко - полезная или целевая информация) и
преобразование этих сведений в форму, удобную для восприятия и дальнейшего использования.
Под "анализом" сигналов (analysis) имеется в виду не только их чисто математические
преобразования, но и получение на основе этих преобразований выводов о специфических
особенностях соответствующих процессов и объектов. Целями анализа сигналов обычно
являются:
- Определение или оценка числовых параметров сигналов (энергия, средняя мощность, среднее
квадратическое значение и пр.).
- Разложение сигналов на элементарные составляющие для сравнения свойств различных
сигналов.
- Сравнение степени близости, "похожести", "родственности" различных сигналов, в том числе
с определенными количественными оценками.
Математический аппарат анализа сигналов весьма обширен, и широко применяется на
практике во всех без исключения областях науки и техники.
2
С понятием сигнала неразрывно связан термин регистрации сигналов, использование которого
также широко и неоднозначно, как и самого термина сигнал. В наиболее общем смысле под этим
термином можно понимать операцию выделения сигнала и его преобразования в форму, удобную
для дальнейшего использования. Так, при получении информации о физических свойствах какихлибо объектов, под регистрацией сигнала понимают процесс измерения физических свойств
объекта и перенос результатов измерения на материальный носитель сигнала или
непосредственное энергетическое преобразование каких-либо свойств объекта в информационные
параметры материального носителя сигнала (как правило - электрического). Но так же широко
термин регистрации сигналов используют и для процессов выделения уже сформированных
сигналов, несущих определенную информацию, из суммы других сигналов (радиосвязь,
телеметрия и пр.), и для процессов фиксирования сигналов на носителях долговременной памяти,
и для многих других процессов, связанных с обработкой сигналов.
Применительно к настоящему курсу под термином регистрации будем понимать регистрацию
данных (data logging) которые проходят через конкретную систему или точку системы и
определенным образом фиксируются на каком-либо материальном носителе или в памяти
системы. Что касается процесса получения информации при помощи технических средств,
обеспечивающих опытным путем нахождение соотношения измеряемой величины с принятой по
определению образцовой единицей этой величины, и представление измеренного соотношения в
какой-либо физической или числовой форме информационного сигнала, то для этого процесса
будем применять, в основном, термин детектирования.
Шумы и помехи (noise). При детектировании сигналов, несущих целевую для данного вида
измерений информацию, в сумме с основным сигналом одновременно регистрируются и
мешающие сигналы - шумы и помехи самой различной природы (рис. 1.1.2). К помехам относят
также искажения полезных сигналов при влиянии различных дестабилизирующих факторов на
процессы измерений, как, например, влияние микрокаверн в стенках скважины на измерения в
рентгенорадиометрических методах каротажа, грозовых разрядов на электроразведочные методы
измерений и т.п. Выделение полезных составляющих из общей суммы зарегистрированных
сигналов или максимальное подавление шумов и помех в информационном сигнале при
сохранении его полезных составляющих является одной из основных задач первичной обработки
сигналов (результатов наблюдений).
Рис. 1.1.2. Сигнал с помехами.
Типы помех разделяют по источникам их возникновения, по энергетическому спектру, по
характеру воздействия на сигнал, по вероятностным характеристикам и другим признакам.
Источники помех бывают внутренние и внешние.
Внутренние шумы могут быть присущи физической природе источников сигналов, как,
например, тепловые шумы электронных потоков в электрических цепях или дробовые эффекты в
электронных приборах, или возникают в измерительных устройствах и системах передачи и
обработки сигналов от влияния различных дестабилизирующих факторов - температуры,
повышенной влажности, нестабильности источников питания, влияния механических вибраций на
гальванические соединения, и т.п.
Внешние источники шумов бывают искусственного и естественного происхождения. К
искусственным источникам помех относятся индустриальные помехи - двигатели, переключатели,
генераторы сигналов различной формы и т.д. Естественными источниками помех являются
молнии, флюктуации магнитных полей, всплески солнечной энергии, и т.д.
Электрические и магнитные поля различных источников помех вследствие наличия
3
индуктивных, емкостных и резистивных связей создают на различных участках и цепях
сигнальных систем паразитные разности потенциалов и токи, накладывающиеся на полезные
сигналы.
Помехи подразделяются на флюктуационные, импульсные и периодические. Флюктуационные
или шумовые помехи представляют хаотический и беспорядочный во времени процесс в виде
нерегулярных случайных всплесков различной амплитуды. Как правило, флюктуационные помехи
распределены по нормальному закону с нулевым средним и оказывают существенное влияние
только на сигналы низкого уровня.
Импульсные помехи во многом похожи на шумовые помехи и проявляются как в виде
отдельных импульсов, так и в виде последовательности импульсов, форма и параметры которых
имеют случайный характер. Причинами импульсных помех являются резкие броски тока и
напряжения в промышленных установках, транспортных средствах, а также природные
электрические явления. Распределение импульсных помех симметричное с произвольной
плотностью распределения.
Периодические помехи вызываются периодическими низкочастотными или высокочастотными
полями линий электропередач, силовых электроустановок и др. Если основная мощность помех
сосредоточена на отдельных участках диапазона частот, например, на частоте напряжения
промышленной сети или кратна этой частоте, то такие помехи называют сосредоточенными.
В зависимости от характера воздействия на сигнал помехи разделяют на аддитивные и
мультипликативные. Аддитивные (налагающиеся) помехи суммируются с сигналом, не зависят от
его значений и формы и не изменяют информативной составляющей самого сигнала.
Мультипликативные или деформирующие помехи могут изменять форму информационной части
сигнала, иметь зависимость от его значений и от определенных особенностей в сигнале и т.п. При
известном характере мультипликативных помех возможна коррекция сигнала на их влияние.
Следует заметить, что деление сигналов на полезные и мешающие (шумовые) является
достаточно условным. Источниками мешающих сигналов также являются определенные
физические процессы, явления или объекты. При выяснении природы мешающих сигналов они
могут переводиться в разряд информационных. Так, например, вариации диаметра скважин
является мешающим фактором практически для всех ядерно-физических методов каротажа.
Вместе с тем этот же фактор, при соответствующем методическом и аппаратурном обеспечении,
может дать возможность бесконтактного определения диаметра скважин в качестве
дополнительного информационного параметра.
Размерность сигналов. Простейшими сигналами геофизической практики являются
одномерные сигналы, как, например, сейсмические импульсы s(t), измерения каких-либо
параметров геофизических полей (электрических, магнитных, и пр.) по профилям на поверхности
земли s(x) или по стволу скважины s(h), и т.п. Значения одномерных сигналов зависят только от
одной независимой переменной, как, например, на рис. 1.1.1 и 1.1.2.
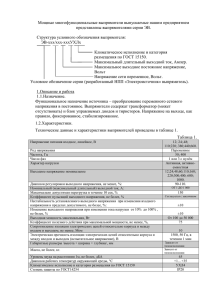
Рис. 1.1.3. Двумерный сигнал.
В общем случае сигналы являются многомерными функциями пространственных, временных и
прочих независимых переменных - сейсмическая волна вдоль линии профиля s(x,t), аномалия
гравитационного поля на поверхности наблюдений s(x,y), пространственно - энергетическое
распределение потока ионизирующих частиц или квантов от источника излучения s(x,y,z,Е) и т.п.
Все большее применение находят также многомерные сигналы, образованные некоторым
4
множеством одномерных сигналов, как, например, комплексные каротажные измерения
нескольких физических параметров горных пород по стволу скважины одновременно.
Многомерные сигналы могут иметь различное представление по своим аргументам. Так,
полный акустический сигнал сейсмического профиля дискретен по пространству (точкам
расположения приемников) и непрерывен по времени.
Многомерный сигнал может рассматриваться, как упорядоченная совокупность одномерных
сигналов. С учетом этого при анализе и обработке сигналов многие принципы и практические
методы обработки одномерных сигналов, математический аппарат которых развит достаточно
глубоко, распространяются и на многомерные сигналы. Физическая природа сигналов для
математического аппарата их обработки значения не имеет.
Вместе с тем обработка многомерных сигналов имеет свои особенности, и может существенно
отличаться от одномерных сигналов в силу большего числа степеней свободы.
Математическое описание сигналов. Сигналы могут быть объектами теоретических
исследований и практического анализа только в том случае, если указан способ их
математического описания - математическая модель сигнала. Математическое описание позволяет
абстрагироваться от физической природы сигнала и материальной формы его носителя, проводить
классификацию сигналов, выполнять их сравнение, устанавливать степень тождества,
моделировать системы обработки сигналов. Как правило, описание сигнала задается
функциональной зависимостью определенного информационного параметра сигнала от
независимой переменной (аргумента) – s(х), y(t) и т.п. Такая форма описания и графического
представления сигналов называется динамической (сигнал в реальной динамике его поведения по
аргументам). Функции математического описания сигналов могут быть как вещественными, так и
комплексными. Выбор математического аппарата описания определяется простотой и удобством
его использования при анализе и обработке сигналов.
Спектральное представление сигналов. Кроме привычного динамического
представления сигналов и функций в виде зависимости их значений от определенных аргументов
(времени, линейной или пространственной координаты и т.п.) при анализе и обработке данных
широко используется математическое описание сигналов по аргументам, обратным аргументам
динамического представления. Так, например, для времени обратным аргументом является
частота. Возможность такого описания определяется тем, что любой сколь угодно сложный по
своей форме сигнал, не имеющий разрывов второго рода (бесконечных значений на интервале
своего задания), можно представить в виде суммы более простых сигналов, и, в частности, в виде
суммы простейших гармонических колебаний, что выполняется при помощи преобразования
Фурье. Соответственно, математически разложение сигнала на гармонические составляющие
описывается функциями значений амплитуд и начальных фаз колебаний по непрерывному или
дискретному аргументу – частоте изменения функций на определенных интервалах аргументов их
динамического представления. Совокупность амплитуд гармонических колебаний разложения
называют амплитудным спектром сигнала, а совокупность начальных фаз – фазовым спектром.
Оба спектра вместе образуют полный частотный спектр сигнала, который по точности
математического представления тождественен динамической форме описания сигнала.
Линейные системы преобразования сигналов описываются дифференциальными уравнениями,
причем для них верен принцип суперпозиции, согласно которому реакция систем на сложный
сигнал, состоящий из суммы простых сигналов, равна сумме реакций от каждого составляющего
сигнала в отдельности. Это позволяет при известной реакции системы на гармоническое
колебание с определенной частотой определить реакцию системы на любой сложный сигнал,
разложив его в ряд гармоник по частотному спектру сигнала. Широкое использование
гармонических функций при анализе сигналов объясняется тем, что они являются достаточно
простыми ортогональными функциями и определены при всех значениях непрерывных
переменных. Кроме того, они являются собственными функциями времени, сохраняющими свою
форму при прохождении колебаний через любые линейные системы и системы обработки данных
с постоянными параметрами (изменяются только амплитуда и фаза колебаний). Немаловажное
значение имеет и то обстоятельство, что для гармонических функций и их комплексного анализа
разработан мощный математический аппарат.
5
Кроме гармонического ряда Фурье применяются и другие виды разложения сигналов: по
функциям Уолша, Бесселя, Хаара, полиномам Чебышева, Лежандра и др. Главное условие
однозначности и математической идентичности отображения сигналов - ортогональность функций
разложения. Но при качественном анализе сигналов могут применяться и неортогональные
функции, выявляющие какие-либо характерные особенности сигналов, полезные для
интерпретации физических данных.
Виды моделей сигналов. При анализе физических данных используются два основных
подхода к созданию математических моделей сигналов.
Первый подход оперирует с детерминированными сигналами, значения которых в любой
момент времени или в произвольной точке пространства (а равно и в зависимости от любых
других аргументов) являются априорно известными или могут быть достаточно точно определены
(вычислены). Такой подход удобен в прямых задачах геофизики (расчеты полей для заданных
моделей сред), в задачах активных воздействий на среду при заранее известных параметрах и
форме сигнала воздействия (вибрационная сейсморазведка, электромагнитные методы каротажа и
пр.), а также при использовании хорошо известных и достоверных геолого-геофизических данных.
Для описания неслучайных сигналов используются также квазидетерминированные модели, в
которых значения одного или нескольких параметров априорно неизвестны, и считаются
случайными величинами с малой случайной компонентой, влиянием которой можно пренебречь.
Второй подход предполагает случайный характер сигналов, закон изменения которых во
времени (или в пространстве) носит случайный характер, и которые принимают конкретные
значения с некоторой вероятностью. Модель такого сигнала представляет собой описание
статистических характеристик случайного процесса путем задания законов распределения
вероятностей, корреляционной функции, спектральной плотности энергии и др.
Случайность может быть обусловлена как собственной физической природой сигналов, что
характерно, например, для методов ядерной геофизики, так и вероятностным характером
регистрируемых сигналов как по времени или месту их появления, так и по содержанию. С этих
позиций случайный сигнал может рассматриваться как отображение случайного по своей природе
процесса или физических свойств объекта (процесса), которые определяются случайными
параметрами или сложным строением геологической среды, результаты измерений в которой
трудно предсказуемы.
Между этими двумя видами сигналов нет резкой границы. Строго говоря, детерминированных
процессов и отвечающих им детерминированных сигналов в природе не существует. Даже
сигналы, хорошо известные на входе в среду (при внешнем воздействии на нее), по месту их
регистрации всегда осложнены случайными помехами, влиянием дестабилизирующих факторов и
априорно неизвестными параметрами и строением самой среды. С другой стороны, модель
случайного поля часто аппроксимируется методом суперпозиции (сложения) сигналов известной
формы. Детерминированные модели могут использоваться и для изучения чисто случайных
процессов, если уровень полезного сигнала в этом процессе значительно выше уровня
статистических флюктуаций, что имеет место, например, при регистрации ионизирующих
излучений от горных пород.
На выбор математической модели поля в том или ином методе геофизики в немалой степени
влияет также сложность математического аппарата обработки сигналов и сложившиеся традиции
геологической интерпретации результатов наблюдений. Не исключается и изменение модели, как
правило, с переводом из вероятностной в детерминированную, в процессе накопления
информации об изучаемом явлении или объекте.
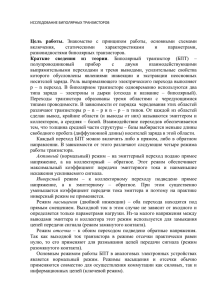
Рис. 1.1.4. Классификация сигналов.
6
Классификация сигналов осуществляется на основании существенных признаков
соответствующих математических моделей сигналов. Все сигналы разделяют на две крупных
группы: детерминированные и случайные (рис. 1.1.4).
Классификация детерминированных сигналов. Обычно выделяют два класса
детерминированных сигналов: периодические и непериодические.
К периодическим относят гармонические и полигармонические сигналы. Для периодических
сигналов выполняется общее условие s(t) = s(t + kT), где k = 1, 2, 3, ... - любое целое число, Т период, являющийся конечным отрезком независимой переменной.
Гармонические сигналы (или синусоидальные), описываются следующими формулами:
s(t) = Asin (2fоt+) = Asin (оt+),
s(t) = Acos(оt+), (1.1.1)
где А, fo, o, - постоянные величины, которые могут исполнять роль информационных
параметров сигнала: А - амплитуда сигнала, fо - циклическая частота в герцах, о= 2fо - угловая
частота в радианах, и - начальные фазовые углы в радианах. Период одного колебания T = 1/f о
= 2/o. При = -/2 синусные и косинусные функции описывают один и тот же сигнал.
Частотный спектр сигнала представлен амплитудным и начальным фазовым значением частоты fо
(при t = 0).
Рис. 1.1.5. Гармонический сигнал и спектр его амплитуд.
Полигармонические сигналы составляют наиболее широко распространенную группу
периодических сигналов и описываются суммой гармонических колебаний:
N
s(t) =
n 0
An sin (2fnt+n),
(1.1.2)
или непосредственно функцией s(t) = y(t kTp), k = 1,2,3,..., где Тр - период одного полного
колебания сигнала y(t), заданного на одном периоде. Значение fp =1/Tp называют фундаментальной
частотой колебаний. Полигармонические сигналы представляют собой сумму определенной
постоянной составляющей (fо=0) и произвольного (в пределе - бесконечного) числа гармонических
составляющих с произвольными значениями амплитуд An и фаз n, с периодами, кратными
периоду фундаментальной частоты fp. Другими словами, на периоде фундаментальной частоты fp,
которая равна или кратно меньше минимальной частоты гармоник, укладывается кратное число
периодов всех гармоник, что и создает периодичность повторения сигнала. Частотный спектр
полигармонических сигналов дискретен, в связи с чем второе распространенное математическое
представление сигналов - в виде спектров (рядов Фурье).
В качестве примера на рис. 1.1.6 приведен отрезок периодической сигнальной функции,
которая получена суммированием постоянной составляющей (частота постоянной составляющей
равна 0) и трех гармонических колебаний с разными значениями частоты и начальной фазы
колебаний. Математическое описание сигнала задается формулой:
3
s(t) =
Akcos(2fkt+k),
k 0
где:
Ak = {5, 3, 4, 7} - амплитуда гармоник; fk = {0, 40, 80, 120} - частота в герцах; k =
{0, -0.4, -0.6, -0.8} - начальный фазовый угол колебаний в радианах; k = 0, 1, 2, 3.
Фундаментальная частота сигнала 40 Гц.
7
Рис. 1.1.6. Модель сигнала.
Рис. 1.1.7. Спектр сигнала.
Частотное представление данного сигнала (спектр сигнала) приведено на рис. 1.1.7. Обратим
внимание, что частотное представление периодического сигнала s(t), ограниченного по числу
гармоник спектра, составляет всего восемь отсчетов и весьма компактно по сравнению с
временным представлением.
Периодический сигнал любой произвольной формы может быть представлен в виде суммы
гармонических колебаний с частотами, кратными фундаментальной частоте колебаний fр= 1/Тр.
Для этого достаточно разложить один период сигнала в ряд Фурье по тригонометрическим
функциям синуса и косинуса с шагом по частоте, равным фундаментальной частоте колебаний f
= fp:
K
s(t) =
k 0
ao = (1/T)
(ak cos 2kft + bk sin 2kft),
T
T
s(t) cos 2kft dt,
b = (2/T)
(1.1.5)
s(t) sin 2kft dt.
k
0
T
s(t) dt, ak = (2/T)
(1.1.3)
0
(1.1.4)
0
Количество членов ряда Фурье K = kmax обычно ограничивается максимальными частотами
fmax гармонических составляющих в сигналах так, чтобы fmax < K·fp. Однако для сигналов с
разрывами и скачками имеет место fmax , при этом количество членов ряда ограничивается по
допустимой погрешности аппроксимации функции s(t).
Одночастотные косинусные и синусные гармоники можно объединить и представить
разложение в более компактной форме:
K
s(t) =
k 0
Sk = ak2 bk2 ,
Sk cos (2kft-k),
k = argtg (bk/ak).
(1.1.3')
(1.1.6)
Рис. 1.1.8. Прямоугольный периодический сигнал (меандр).
Пример представления прямоугольного периодического сигнала (меандра) в виде
амплитудного ряда Фурье в частотной области приведен на рис. 1.1.8. Сигнал четный
относительно t=0, не имеет синусных гармоник, все значения k для данной модели сигнала равны
нулю.
Информационными параметрами полигармонического сигнала могут быть как определенные
особенности формы сигнала (размах от минимума до максимума, экстремальное отклонение от
среднего значения, и т.п.), так и параметры определенных гармоник в этом сигнале. Так,
например, для прямоугольных импульсов информационными параметрами могут быть период
повторения импульсов, длительность импульсов, скважность импульсов (отношение периода к
длительности). При анализе сложных периодических сигналов информационными параметрами
могут также быть:
- Текущее среднее значение за определенное время, например, за время периода:
8
(1/Т)
t T
t
s(t) dt.
- Постоянная составляющая одного периода:
(1/Т)
T
s(t) dt.
0
- Среднее выпрямленное значение:
(1/Т)
T
|s(t)| dt.
0
- Среднее квадратичное значение:
1
T
T
x(t)
0
2
dt
.
К непериодическим сигналам относят почти периодические и апериодические сигналы.
Основным инструментом их анализа также является частотное представление.
Рис. 1.1.9. Почти периодический сигнал и спектр его амплитуд.
Почти периодические сигналы близки по своей форме к полигармоническим. Они также
представляют собой сумму двух и более гармонических сигналов (в пределе – до бесконечности),
но не с кратными, а с произвольными частотами, отношения которых (хотя бы двух частот
минимум) не относятся к рациональным числам, вследствие чего фундаментальный период
суммарных колебаний бесконечно велик. Так, например, сумма двух гармоник с частотами 2fи
3.5f дает периодический сигнал (2/3.5 – рациональное число) с фундаментальной частотой 0.5f,
на одном периоде которой будут укладываться 4 периода первой гармоники и 7 периодов второй.
Но если значение частоты второй гармоники заменить близким значением 12 f, то сигнал
перейдет в разряд непериодических, поскольку отношение 2/ 12 не относится к числу
рациональных чисел. Как правило, почти периодические сигналы порождаются физическими
процессами, не связанными между собой. Математическое отображение сигналов тождественно
полигармоническим сигналам (сумма гармоник), а частотный спектр также дискретен.
Апериодические сигналы составляют основную группу непериодических сигналов и
задаются произвольными функциями времени. На рис. 1.1.10 показан пример апериодического
сигнала, заданного формулой на интервале (0, ):
s(t) = exp(-at) - exp(-bt),
где a и b – константы, в данном случае a = 0.15, b = 0.17.
Рис. 1.1.10. Апериодический сигнал и модуль спектра. Рис. 1.1.11. Импульсный сигнал и
модуль спектра.
К апериодическим сигналам относятся также импульсные сигналы, которые в радиотехнике и в
отраслях, широко ее использующих, часто рассматривают в виде отдельного класса сигналов.
9
Импульсы представляют собой сигналы, как правило, определенной и достаточно простой формы,
существующие в пределах конечных временных интервалов. Сигнал, приведенный на рис. 1.1.11,
относится к числу импульсных.
Частотный спектр апериодических сигналов непрерывен и может содержать любые гармоники
в частотном интервале [0, ]. Для его вычисления используется интегральное преобразование
Фурье, которое можно получить переходом в формулах (1.1.3) от суммирования к
интегрированию при f 0 и kf f.
s(t) =
0
(a(f) cos 2ft + b(f) sin 2ft) df =
S(f) cos(2ft-(f)) df.
0
(1.1.7)
T
a(f) =
s(t) cos 2ft dt,
0
S(f) =
a(f) 2 b(f) 2 ,
T
b(f) =
s(t) sin 2ft dt,
(1.1.8)
0
(f) = argtg (b(f)/a(f)).
(1.1.9)
Частотные функции a(f), b(f) и S(f) представляют собой не амплитудные значения
соответствующих гармоник на определенных частотах, а распределения спектральной плотности
амплитуд этих гармоник по частотной шкале. Формулы (1.1.8-1.1.9) обычно называют формулами
прямого преобразования Фурье, формулы (1.1.7) – обратного преобразования.
Если нас не интересует поведение сигнала за пределами области его задания [0, Т], то эта
область может восприниматься, как один период периодического сигнала, т.е. значение Т
принимается за фундаментальную частоту периодический колебаний, при этом для частотной
модели сигнала может применяться разложение в ряды Фурье по области его задания (1.1.3-1.1.6).
В классе импульсных сигналов выделяют подкласс радиоимпульсов. Пример радиоимпульса
приведен на рис. 1.1.12.
Рис. 1.1.12. Радиоимпульс и модуль его спектра.
Уравнение радиоимпульса имеет вид
s(t) = u(t) cos(2fot+o).
где cos(2fot+o) – гармоническое колебание заполнения радиоимпульса, u(t) – огибающая
радиоимпульса. Положение главного пика спектра радиоимпульса на частотной шкале
соответствует частоте заполнения fo, а его ширина определяется длительностью радиоимпульса.
Чем больше длительность радиоимпульса, тем меньше ширина главного частотного пика.
С энергетических позиций сигналы разделяют на два класса: с ограниченной (конечной)
энергией и с бесконечной энергией.
Для сигналов с ограниченной энергией (иначе – сигналов с интегрируемым квадратом)
должно выполняться соотношение:
|s(t)|2dt < ∞.
-
Как правило, к этому классу сигналов относятся апериодические и импульсные сигналы, не
имеющие разрывов 2-го рода при ограниченном количестве разрывов 1-го рода. Любые
периодические, полигармонические и почти периодические сигналы, а также сигналы с разрывами
и особыми точками 2-го рода, уходящими в бесконечность, относятся к сигналам с бесконечной
энергией. Для их анализа применяются специальные методы.
Иногда в отдельный класс выделяют сигналы конечной длительности, отличные от нуля
10
только на ограниченном интервале аргументов (независимых переменных). Такие сигналы обычно
называют финитными.
Классификация случайных сигналов. Случайным сигналом называют функцию
времени, значения которой заранее неизвестны, и могут быть предсказаны лишь с некоторой
вероятностью. Случайный сигнал отображает случайное физическое явление или физический
процесс, причем зарегистрированный в единичном наблюдении сигнал не воспроизводится при
повторных наблюдениях и не может быть описан явной математической зависимостью. При
регистрации случайного сигнала реализуется только один из возможных вариантов (исходов)
случайного процесса, а достаточно полное и точное описание процесса в целом можно произвести
только после многократного повторения наблюдений и вычисления определенных статистических
характеристик ансамбля реализаций сигнала. В качестве основных статистических характеристик
случайных сигналов принимают:
а) закон распределения вероятности нахождения величины сигнала в определенном
интервале значений;
б) спектральное распределение мощности сигнала.
Случайные сигналы подразделяют на стационарные и нестационарные. Случайные
стационарные сигналы сохраняют свои статистические характеристики в последовательных
реализациях случайного процесса. Что касается случайных нестационарных сигналов, то их
общепринятой классификации не существует. Как правило, из них выделяют различные группы
сигналов по особенностям их нестационарности.
1.2. ТИПЫ СИГНАЛОВ
Выделяют следующие типы сигналов, которым соответствуют определенные формы их
математического описания.
Аналоговый сигнал (analog signal) является непрерывной функцией непрерывного
аргумента, т.е. определен для любого значения аргументов. Источниками аналоговых сигналов,
как правило, являются физические процессы и явления, непрерывные в динамике своего развития
во времени, в пространстве или по любой другой независимой переменной, при этом
регистрируемый сигнал подобен (“аналогичен”) порождающему его процессу. Пример
математической записи сигнала: y(t) = 4.8 exp[-(t-4)2/2.8]. Пример графического отображения
данного сигнала приведен на рис. 1.2.1, при этом как сама функция, так и ее аргументы, могут
принимать любые значения в пределах некоторых интервалов y1 y y2, t1 t t2. Если
интервалы значений сигнала или его независимых переменных не ограничиваются, то по
умолчанию они принимаются равными от - до +. Множество возможных значений сигнала
образует континуум - непрерывное пространство, в котором любая сигнальная точка может быть
определена с точностью до бесконечности. Примеры сигналов, аналоговых по своей природе изменение напряженности электрического, магнитного, электромагнитного поля во времени и в
пространстве.
Рис. 1.2.1. Аналоговый сигнал.
Дискретный сигнал (discrete signal) по своим значениям также является непрерывной
функцией, но определенной только по дискретным значениям аргумента. По множеству своих
значений он является конечным (счетным) и описывается дискретной последовательностью
отсчетов (samples) y(nt), где y1 y y2, t - интервал между отсчетами (интервал или шаг
дискретизации, sample time), n = 0, 1, 2,...,N. Величина, обратная шагу дискретизации: f = 1/t,
называется частотой дискретизации (sampling frequency). Если дискретный сигнал получен
11
дискретизацией (sampling) аналогового сигнала, то он представляет собой последовательность
отсчетов, значения которых в точности равны значениям исходного сигнала по координатам nt.
Пример дискретизации аналогового сигнала, приведенного на рис. 1.2.1, представлен на рис.
1.2.2. При t = const (равномерная дискретизация данных) дискретный сигнал можно описывать
сокращенным обозначением y(n). В технической литературе в обозначениях дискретизированных
функций иногда оставляют прежние индексы аргументов аналоговых функций, заключая
последние в квадратные скобки - y[t]. При неравномерной дискретизации сигнала обозначения
дискретных последовательностей (в текстовых описаниях) обычно заключаются в фигурные
скобки - {s(ti)}, а значения отсчетов приводятся в виде таблиц с указанием значений координат ti.
Для числовых последовательностей (равномерных и неравномерных) применяется и следующее
числовое описание: s(ti) = {a1, a2, ..., aN}, t = t1, t2, ...,tN. Примеры дискретных геофизических
сигналов - результаты вертикального электрического зондирования (дискретная величина разноса
токовых электродов), профили геохимического опробования, и т.п.
Рис. 1.2.2. Дискретный сигнал
Рис. 1.2.3. Цифровой сигнал
Цифровой сигнал (digital signal) квантован по своим значениям и дискретен по аргументу.
Он описывается квантованной решетчатой функцией yn = Qk[y(nt)], где Qk - функция квантования
с числом уровней квантования k, при этом интервалы квантования могут быть как с равномерным
распределением, так и с неравномерным, например - логарифмическим. Задается цифровой
сигнал, как правило, в виде дискретного ряда (discrete series) числовых данных - числового
массива по последовательным значениям аргумента при t = const, но в общем случае сигнал
может задаваться и в виде таблицы для произвольных значений аргумента.
По существу, цифровой сигнал по своим значениям (отсчетам) является формализованной
разновидностью дискретного сигнала при округлении отсчетов последнего до определенного
количества цифр, как это показано на рис 1.2.3. Цифровой сигнал конечен по множеству своих
значений. Процесс преобразования бесконечных по значениям аналоговых отсчетов в конечное
число цифровых значений называется квантованием по уровню, а возникающие при квантовании
ошибки округления отсчетов (отбрасываемые значения) – шумами (noise) или ошибками (error)
квантования (quantization).
В системах цифровой обработки данных и в ЭВМ сигнал всегда представлен с точностью до
определенного количества разрядов, а, следовательно, всегда является цифровым. С учетом этих
факторов при описании цифровых сигналов функция квантования обычно опускается
(подразумевается равномерной по умолчанию), а для описания сигналов используются правила
описания дискретных сигналов. Что касается формы обращения цифровых сигналов в системах
хранения, передачи и обработки, то, как правило, они представляет собой комбинации коротких
одно- или двуполярных импульсов одинаковой амплитуды, которыми в двоичном коде с
определенным количеством числовых разрядов кодируются числовые последовательности
сигналов (массивов данных).
12
Рис. 1.2.4. Дискретно-аналоговый сигнал
В принципе, квантованными по своим значениям могут быть и аналоговые сигналы,
зарегистрированные соответствующей аппаратурой (рис. 1.2.4), которые принято называть
дискретно-аналоговыми. Но выделять эти сигналы в отдельный тип не имеет смысла - они
остаются аналоговыми кусочно-непрерывными сигналами с шагом квантования, который
определяется допустимой погрешностью измерений.
Большинство сигналов, с которыми приходится иметь дело при обработке геофизических
данных, являются аналоговыми по своей природе, дискретизированными и квантованными в силу
методических особенностей измерений или технических особенностей регистрации, т.е.
преобразованными в цифровые сигналы. Но существуют и сигналы, которые изначально
относятся к классу цифровых, как, например отсчеты количества гамма-квантов,
зарегистрированных по последовательным интервалам времени.
Преобразования типа сигналов. Формы математического отображения сигналов,
особенно на этапах их первичной регистрации (детектирования) и в прямых задачах описания
геофизических полей и физических процессов, как правило, отражают их физическую природу.
Однако последнее не является обязательным и зависит от методики измерений и технических
средств детектирования, преобразования, передачи, хранения и обработки сигналов. На разных
этапах процессов получения и обработки информации как материальное представление сигналов в
устройствах регистрации и обработки, так и формы их математического описания при анализе
данных, могут изменяться путем соответствующих операций преобразования типа сигналов.
Операция дискретизации (discretization) осуществляет преобразование аналоговых
сигналов (функций), непрерывных по аргументу, в функции мгновенных значений сигналов по
дискретному аргументу. Дискретизация обычно производится с постоянным шагом по аргументу
(равномерная дискретизация), при этом s(t) s(nt), где значения s(nt) представляют собой
отсчеты функции s(t) в моменты времени t = nt, n = 0, 1, 2,..., N. Частота, с которой выполняются
замеры аналогового сигнала, называется частотой дискретизации. В общем случае, сетка
отсчетов по аргументу может быть произвольной, как, например, s(t)s(tk), k=1, 2, …, K, или
задаваться по определенному закону. В результате дискретизации непрерывный (аналоговый)
сигнал переводится в последовательность чисел.
Операция восстановления аналогового сигнала из его дискретного представления
обратна операции дискретизации и представляет, по существу, интерполяцию данных.
Дискретизация сигналов может приводить к определенной потере информации о поведении
сигналов в промежутках между отсчетами. Однако существуют условия, определенные теоремой
Котельникова-Шеннона, согласно которым аналоговый сигнал с ограниченным частотным
спектром может быть без потерь информации преобразован в дискретный сигнал, и затем
абсолютно точно восстановлен по значениям своих дискретных отсчетов.
Как известно, любая непрерывная функция может быть разложена на конечном отрезке в ряд
Фурье, т.е. представлена в спектральной форме - в виде суммы ряда синусоид с кратными
(нумерованными) частотами с определенными амплитудами и фазами. У относительно гладких
функций спектр быстро убывает (коэффициенты модуля спектра быстро стремятся к нулю). Для
представления "изрезанных" функций, с разрывами и "изломами", нужны синусоиды с большими
частотами. Говорят, что сигнал имеет ограниченный спектр, если после определенной частоты F
все коэффициенты спектра равны нулю, т.е. сигнал представляется в виде конечной суммы ряда
Фурье.
13
Теоремой Котельникова-Шеннона устанавливается, что если спектр сигнала ограничен
частотой F, то после дискретизации сигнала с частотой не менее 2F можно восстановить исходный
непрерывный сигнал по полученному цифровому сигналу абсолютно точно. Для этого нужно
выполнить интерполяцию цифрового сигнала "между отсчетами" специальной
функцией
(Котельникова-Шеннона).
На практике эта теорема имеет огромное значение. Например, известно, что диапазон
звуковых сигналов, воспринимаемых человеком, не превышает 20 кГц. Следовательно, при
дискретизации записанных звуковых сигналов с частотой не менее 40 кГц мы можем точно
восстановить исходный аналоговый сигнал по его цифровым отсчетам, что и выполняется в
проигрывателях компакт-дисков для восстановления звука. Частота дискретизации звукового
сигнала при записи на компакт-диск составляет 44100 Гц.
Операция квантования или аналого-цифрового преобразования (АЦП; английский термин
Analog-to-Digital Converter, ADC) заключается в преобразовании дискретного сигнала s(t n) в
цифровой сигнал s(n) = sn s(tn), n = 0, 1, 2,.., N, как правило, кодированный в двоичной системе
счисления. Процесс преобразования отсчетов сигнала в числа называется квантованием по уровню
(quantization), а возникающие при этом потери информации за счет округления – ошибками или
шумами квантования (quantization error, quantization noise).
При преобразовании аналогового сигнала непосредственно в цифровой сигнал операции
дискретизации и квантования совмещаются.
Операция цифро-аналогового преобразования (ЦАП; Digital-to-Analog Converter,
DAC) обратна операции квантования, при этом на выходе регистрируется либо дискретноаналоговый сигнал s(tn), который имеет ступенчатую форму (рис. 1.2.4), либо непосредственно
аналоговый сигнал s(t), который восстанавливается из s(tn), например, путем сглаживания.
Так как квантование сигналов всегда выполняется с определенной и неустранимой
погрешностью (максимум - до половины интервала квантования), то операции АЦП и ЦАП не
являются взаимно обратными с абсолютной точностью.
Алиасинг. А что произойдет, если спектр аналогового сигнала был неограниченным или имел
частоту, выше частоты дискретизации?
Рис. 1.2.5. Появление кажущейся частоты при дискретизации.
Предположим, что при записи акустического сигнала оркестра в помещении от какого-то
устройства присутствует ультразвуковой сигнал с частотой 30 кГц. Запись выполняется с
дискретизацией сигнала на выходе микрофона с типовой частотой 44.1 кГц. При прослушивании
такой записи с использованием ЦАП мы услышим шумовой сигнал на частоте 30 – 44.1/2 8 кГц.
Восстановленный сигнал будет выглядеть так, как если бы частоты, лежащие выше половины
частоты дискретизации, "зеркально" от нее отразились в нижнюю часть спектра и сложились с
присутствующими там гармониками.
Это так называемый эффект появления ложных
(кажущихся) частот (aliasing). Эффект аналогичен всем известному эффекту обратного вращения
колес автомобиля на экранах кино и телевизоров, когда скорость их вращения начинает
превышать частоту смены кадров. Природу эффекта можно наглядно видеть на рис. 1.2.5.
Аналогично в главный частотный диапазон дискретных сигналов "отражаются" от частоты
дискретизации и все высокочастотные шумы, присутствующие в исходном аналоговом сигнале.
Для предотвращения алиасинга следует повышать частоту дискретизации или ограничить
спектр сигнала перед оцифровкой фильтрами низких частот (НЧ-фильтры, low-pass filters),
которые пропускают без изменения все частоты, ниже заданной, и подавляют в сигнале частоты,
выше заданной. Эта граничная частота называется частотой среза (cutoff frequency) фильтра.
14
Частота среза анти-алиасинговых фильтров устанавливается равной половине частоты
дискретизации. В реальные АЦП почти всегда встраивается анти-алиасинговый фильтр.
1.3. СИСТЕМЫ ПРЕОБРАЗОВАНИЯ СИГНАЛОВ
Сигналы, в любой форме материального представления, содержат определенную полезную
информацию. Если при преобразованиях сигналов происходит нарушение заключенной в них
информации (частичная утрата, количественное изменение соотношения информационных
составляющих или параметров, и т.п.), то такие изменения называются искажениями сигнала.
Если полезная информация остается неизменной или адекватной содержанию во входном сигнале,
то такие изменения называются преобразованиями сигнала.
Любые изменения сигналов сопровождаются изменением их спектра, и по характеру этого
изменения разделяются на два вида: линейные и нелинейные. К нелинейным относят изменения,
при которых в составе спектра сигналов появляются новые гармонические составляющие,
отсутствующие во входном сигнале. При линейных изменениях сигналов изменяются амплитуды
и/или начальные фазы гармонических составляющих спектра. И линейные, и нелинейные
изменения сигналов могут происходить как с сохранением полезной информации, так и с ее
искажением. Это зависит не только от характера изменения спектра сигналов, но и от
спектрального состава самой полезной информации.
Общее понятие систем. Преобразование и обработка сигналов осуществляется в
системах. Понятия сигнала и системы неразрывны, так как любой сигнал существует в пределах
какой-либо системы. Система обработки сигналов может быть реализована как в материальной
форме (специальное устройство, измерительный прибор, совокупность физических объектов с
определенной структурой взаимодействия и т.п.), так и программно на ЭВМ или любом другом
специализированном вычислительном устройстве. Форма реализации системы существенного
значения не имеет, и определяет только ее возможности при анализе и обработке сигналов.
Безотносительно к назначению система всегда имеет вход, на который подается внешний
входной сигнал, в общем случае многомерный, и выход, с которого снимается обработанный
выходной сигнал. Собственно система представляет собой системный оператор (алгоритм)
преобразования входного сигнала s(t) – воздействия или возбуждения, в сигнал на выходе
системы y(t) – отклик или выходную реакцию системы. Символическое обозначение операции
преобразования (трансформации сигнала): y(t) = T[s(t)].
Рис. 1.3.1. Графическое представление системы.
Линейные и нелинейные системы составляют два основных класса систем обработки
сигналов.
Термин линейности (linear) означает, что система преобразования сигналов должна иметь
произвольную, но в обязательном порядке линейную связь между входным сигналом
(возбуждением) и выходным сигналом (откликом) с определенным изменением спектрального
состава входного сигнала (усиление или подавление определенных частотных составляющих
сигнала. В нелинейных (nonlinear) системах связь между входным и выходным сигналом
определяется произвольным нелинейным законом с дополнением частотного состава входного
сигнала частотными составляющими, отсутствующими во входном сигнале.
Стационарные и нестационарные системы. Система считается стационарной и имеет
постоянные параметры, если ее свойства (математический алгоритм оператора преобразования) в
пределах заданной точности не зависят от входного и выходного сигналов и не изменяются ни во
времени, ни от каких-либо других внешних факторов. В противном случае система является
нестационарной, и называется параметрической или системой с переменными параметрами.
Среди последних большое значение имеют так называемые адаптивные системы обработки
данных. В этих системах производится, например, оценивание определенных параметров входных
и выходных сигналов, по результатам сравнения которых осуществляется подстройка параметров
преобразования (переходной характеристики системы) таким образом, чтобы обеспечить
оптимальные по производительности условия обработки сигналов или минимизировать
15
погрешность обработки.
Основные системные операции. К базовым линейным операциям, из которых могут
быть сформированы любые линейные операторы преобразования, относятся операции скалярного
умножения, сдвига и сложения сигналов:
y(t) = c s(t),
y(t) = s(t-t),
y(t) = a(t)+b(t).
Для нелинейных систем выделим важный тип безинерционных операций нелинейной
трансформации сигнала, результаты которой зависят только от его входных значений. К ним
относятся, например, операции квадратирования и логарифмирования сигнала:
y(t) = [s(t)]2, y(t) = log[s(t)].
Линейные системы. Система считается линейной, если ее реакция на входные сигналы
аддитивна (выполняется принцип суперпозиции сигналов) и однородна (выполняется принцип
пропорционального подобия). Другими словами, отклик линейной системы на взвешенную сумму
входных сигналов должен быть равен взвешенной сумме откликов на отдельные входные сигналы
независимо от их количества и для любых весовых коэффициентов, в том числе комплексных.
При программной реализации линейных систем на ЭВМ особых затруднений с обеспечением
линейности в разумных пределах значений входных и выходных сигналов, как правило, не
возникает. При физической (аппаратной) реализации систем обработки данных диапазон входных
и выходных сигналов, в котором обеспечивается линейность преобразования сигналов, всегда
ограничен и должен быть специально оговорен.
Инвариантность систем к сдвигу. Система называется инвариантной к сдвигу, если
сдвиг входного сигнала по аргументам (времени, координатам пространства и т.п.) вызывает
соответствующий сдвиг выходного сигнала:
y(x,t) = T[s(x,t)], T[s(x-x,t-t)] = y(x-x,t-t).
Это означает, что форма выходного сигнала зависит только от входного сигнала, и не зависит
от времени поступления сигнала на вход системы. Инвариантность системы к сдвигу является
одним из подтверждений постоянства ее параметров.
Линейные системы, инвариантные к сдвигу. Линейность и инвариантность к сдвигу
являются независимыми свойствами систем и не определяют друг друга. Так, например, операция
квадратирования сигнала инвариантна к сдвигу, но нелинейна.
В теории анализа и обработки данных основное место занимают системы, линейные и
инвариантные к сдвигу (ЛИС - системы). Они обладают достаточно широкими практическими
возможностями при относительной простоте математического аппарата. В дальнейшем, если это
специально не оговаривается, будем иметь в виду именно такие системы.
Преимущество, которое отдается ЛИС - системам в методах обработки информации,
базируется на возможности разложения входного сигнала любой, сколь угодно сложной формы,
на составляющие простейших форм, отклик системы на которые известен и хорошо изучен, с
последующим вычислением выходного сигнала в виде суммы откликов на все составляющие
входного сигнала. В качестве простейших форм разложения сигналов используются, как правило,
единичные импульсы и гармонические составляющие. Разложение по единичным импульсам
применяется при динамическом представлении сигнала в зависимости от реальных физических
аргументов (времени, координат и пр.) и использует операцию свертки. Разложение на
гармонические составляющие использует спектральное (частотное) представление сигнала и
преобразование Фурье.
Соединения ЛИС - систем. При последовательном (каскадном) соединении систем
выходной сигнал одной системы служит входным сигналом для второй и т.д. в зависимости от
количества составляющих систем каскада. По отношению к общей системной операции
преобразования порядок соединения входящих в нее систем значения не имеет.
16
Рис. 1.3.2 Соединения систем.
Так, для двух последовательно соединенных систем на рис. 1.3.2:
y(t) = T2[T1[s(t)]] = T1[T2[s(t)]].
При параллельном соединении входной сигнал поступает одновременно на входы всех
составляющих систем, а выходные сигналы систем суммируются:
y(t) = T1[s(t)] + T2[s(t)] + ... + TN[s(t)].
Образуемые в результате соединений системы в целом также являются ЛИС - системами,
если линейны и инвариантны к сдвигу системы, в них входящие.
Обобщенная схема системы цифровой обработки сигналов на рис. 1.3.3 приведена в
качестве примера.
Рис. 1.3.3. Структурная схема системы дифференцирования сигналов.
Понятие информации. В настоящее время нет общепринятого и однозначного понимания
термина "Информация". Спектр бытующих понятий весьма широк, от общего философского информация есть отражение реального мира, до узко практического - информация есть сведения,
являющиеся объектом хранения, передачи и преобразования. Расхождения существуют и по
вопросу места информации в материальном мире. Это свойство индивидуальных объектов или
результат их взаимодействия? Присуща ли информация всем видам материи или лишь
определенным образом организованной материи?
В информатике под информацией понимается, как правило, совокупность сведений
смыслового содержания, которые можно собирать, обрабатывать, передавать и т.п. Причем
именно сведений в изначальном смысле латинского слова informatio, а не данных или сигналов,
которые являются носителями этих сведений. В таком понимании процессы извлечения сведений
из данных и их интерпретации неразрывно связаны с разумом, а конечным результатом обработки
и восприятия информации с помощью разума является раскрытие неопределенности знаний о
каком-либо объекте, явлении или процессе. Но при таком подходе размывается само понятие
разума.
С одной стороны, существование любого живого существа поддерживается до тех пор, пока
действуют его органы чувств (датчики), преобразующие физические воздействия окружающего
мира в определенным образом организованные сигналы, которые в материальной форме
отображают данные об этих воздействиях. Данные собираются и интерпретируются определенной
системой, которую в самой общей форме мы называем "разумом", из общей суммы данных
извлекаются определенные сведения, степень неопределенности сведений об окружающей
обстановке снижается, и ... лиса распутывает заячий след. Живое существо существует до тех пор,
пока способно воспринимать и обрабатывать внешние и внутренние воздействия. Нет сомнений и
в том, что в коллективных сообществах его члены не только способны собирать и обрабатывать
информацию, но и передавать ее другим членам сообщества, как, например, в пчелиной семье
точный путь до продуктивного цветочного массива. Информационный танец пчелы в этом
отношении по компактности содержания ничем не уступает телеграфному сообщению.
Естественно, в принятой у пчел символьной форме.
17
С другой стороны, если информация неразрывно связана с "разумом", то в этом случае нельзя
отказать в "разуме" и электронной вычислительной машине, обыгрывающей в шахматы чемпиона
мира, а равно и любым устройствам технической кибернетики любого уровня, так как все они
имеют определенные системы сбора, передачи, накопления, хранения и обработки информации
той или иной степени сложности, и на основе этой информации способны формировать сигналы
обратной связи для управления определенными процессами.
В технических отраслях знаний, где вопросы соотношения информации с разумом не стоят на
первом месте, преобладает понимание информации в виде отображения такого всеобщего
свойства материи, как разнообразие, как характеристики внутренней организованности
материальных систем, процессов или явлений по множеству состояний, которые для них
возможны. В такой трактовке информация существует независимо от того, воспринимается она
каким-либо "разумом" или нет, и является одним из свойств материальных объектов.
"Информация есть информация, а не материя и не энергия" (Норберт Винер). Это свойство в
какой-то мере имеет потенциальный характер. Информация может проявлять себя только при
взаимодействии объектов или процессов, может возникать (создаваться) и исчезать
(уничтожаться).
Но и в такой трактовке возникает очень много вопросов, на которые трудно дать однозначные
ответы. Насекомое третичного периода, неизвестное в настоящее время ученым, прилипло к капле
смолы хвойного дерева. Новый слой смолы закрыл насекомое. Дерево упало, и его занесло
песком. Смола превратилась в янтарь. Янтарь в потенциале содержит полную информацию о
насекомом, потому как в нем десятки тысяч фрагментов ДНК - информация, достаточная для
восстановления ДНК и воспроизводства насекомого, если не в настоящее время, то в ближайшем
будущем. Но когда она возникла? В момент появления насекомого с его ДНК? В момент
прилипания к смоле? В момент окаменения? Можно ли говорить о появлении информации, если
еще не существовал субъект, способный извлечь и использовать эту информацию? Наконец,
янтарь с насекомым найден и попал на глаза палеонтолога. Определен новый вид насекомого.
Появилась первая частичная информация? Так может быть, информация появляется только при
активном и целенаправленном воздействии на объект исследований? А если янтарь оказался
непрозрачным, и его переплавили? Исчезла ли информация? И можно ли считать, что она вообще
была?
Ответы на эти и подобные им вопросы тяготеют к двум полюсам, а по существу, к двум
диаметрально противоположным философским позициям.
Сторонники первой позиции считают, что информация присуща только определенным образом
организованным объектам или процессам, и понимают под информацией только то, что может
восприниматься, обрабатываться, осмысливаться и использоваться, т.е. является продуктом
целенаправленного процесса сбора, организации, систематизации и использования сведений о
материальных объектах и процессах.
Противоположная позиция, это понятие информации как свойства объектов и процессов
воспринимать и перерабатывать внутреннее состояние и внешнее воздействие окружающей среды,
сохранять его результаты и передавать их другим объектам. С этой позиции все материальные
объекты и процессы являются источниками, носителями и потребителями информации, на основе
которой и идет развитие реального мира. По существу, это соответствует принятию
материальности информации и информационной основы мироздания.
Определения понятия «информация» из международных стандартов:
знания о предметах, фактах, идеях и т. д., которыми могут обмениваться люди в рамках
конкретного контекста (ISO/IEC 10746-2:1996)[3];
знания относительно фактов, событий, вещей, идей и понятий, которые в определённом
контексте имеют конкретный смысл (ISO/IEC 2382-1:1993)[4].
При неопределенности самого понятия информации можно достаточно обоснованно считать,
что информация проявляется, хранится и передается от одного объекта к другому в материально энергетической форме в виде сигналов. Сигналом, как материальным носителем информации,
может быть любой физический процесс (электрический, магнитный, оптический, акустический и
18
пр.), определенные параметры которого (амплитуда, частота, энергия, интенсивность и др.)
однозначно отображают информационные данные (сообщения).
Количественная мера информации. Теория любого явления начинается с появления
количественных взаимоотношений между объектами исследований, т.е. при установлении
принципов измеряемости каких-либо свойств объектов. Единицу количественной меры
информации - БИТ (сокращение binary digit - двоичная цифра), впервые предложил Р. Хартли в
1928 году. 1 бит - это информация о двух возможных равновероятных состояниях объекта,
неопределенность выбора из двух равновероятных событий. Математически это отображается
состоянием 1 или 0 одного разряда двоичной системы счисления. Количество информации Н (в
битах), необходимое и достаточное для полного снятия неопределенности состояния объекта,
который имеет N равновозможных состояний, измеряется как логарифм по основанию 2 из числа
возможных состояний:
H = log 2 N.
(1.4.1)
Соответственно, двоичный числовой информационный код одного из N возможных состояний
объекта занимает Н двоичных разрядов.
Если в приведенном примере на этажах имеется по 4 квартиры с нумерацией на каждом этаже
0-3 (М=4), то при адресации груза в квартиру потребуется еще 2 бита информации. Такой же
результат получим, если вместо независимой нумерации этажей и квартир на этажах (два
источника неопределенности) мы будем иметь только сквозную нумерацию квартир (один
обобщенный источник):
H = log 2 N + log 2 M = log 2 16 + log 2 4 = 6 log 2 (N M) = log 2 64 = 6,
т.е. количество информации отвечает требованию аддитивности: неопределенность
объединенного источника равна сумме неопределенностей исходных источников, что
соответствует интуитивному требованию к информации: она должна быть однозначной, а ее
количество должно быть одним и тем же независимо от способа задания.
Основание логарифма не имеет принципиального значения и определяет только масштаб или
единицу неопределенности. Так, если за единицу неопределенности принять три равновероятных
состояния, то для определения, например, одной фальшивой золотой монеты (более легкой) из 27
внешне неотличимых монет потребуется только H = log 3 27 = 3, т.е. три взвешивания на
равноплечных весах. Логику исчисления взвешиваний предлагается определить самостоятельно.
Двоичная мера информации получила общее признание в связи с простотой реализации
информационной техники на элементах с двумя устойчивыми состояниями. В десятичном
исчислении единицей информации является один десятичный разряд - ДИТ.
Энтропия источника информации. Степень неопределенности состояния объекта (или
так называемого источника информации) зависит не только от числа его возможных состояний, но
и от вероятности этих состояний. При неравновероятных состояниях свобода выбора для
источника ограничивается. Так, если из двух возможных состояний вероятность одного из них
равна 0.999, то вероятность другого состояния соответственно равна 1-0.999 = 0.001, и при
взаимодействии с таким источником результат практически предрешен.
В общем случае, в соответствии с теорией вероятностей, источник информации однозначно и
полно характеризуется ансамблем состояний U = {u1, u2,..., uN} с вероятностями состояний
соответственно {р(u1), р(u2),..., р(uN)} при условии, что сумма вероятностей всех состояний равна
1. Мера количества информации, как неопределенности выбора дискретным источником
состояния из ансамбля U, предложена К. Шенноном в 1946 году и получила название энтропии
дискретного источника информации или энтропии конечного ансамбля:
N
H(U) = -
n 1
pn log2 pn.
(1.4.2)
Выражение Шеннона совпадает с выражением Больцмана для энтропии физических систем
при оценке степени разнообразия их состояний. Мера энтропии Шеннона является обобщением
меры Хартли на случай ансамблей с неравновероятными состояниями, в чем нетрудно убедиться,
если в выражении (1.4.2) значение pn заменить значением p=1/N для ансамбля равновероятных
состояний. Энтропия конечного ансамбля H(U) характеризует неопределенность, приходящуюся
19
в среднем на одно состояние ансамбля.
Учитывая, что в дальнейшем во всех математических выражениях, касающихся энтропии,
мы будем использовать только двоичное основание логарифма, индекс 2 основания логарифма в
формулах будем подразумевать по умолчанию.
Основные свойства энтропии:
1. Энтропия является величиной вещественной и неотрицательной, т.к. значения вероятностей
pn находятся в интервале 0-1, значения log p n всегда отрицательны, а значения -p n log pn в (1.4.2)
соответственно положительны.
2. Энтропия - величина ограниченная, т.к. при p n 0 значение -pnlog pn также стремится к
нулю, а при 0 < pn 1 ограниченность суммы всех слагаемых очевидна.
3. Энтропия равна 0, если вероятность одного из состояний источника информации равна 1, и
тем самым состояние источника полностью определено (вероятности остальных состояний
источника равны нулю, т.к. сумма вероятностей должна быть равна 1).
4. Энтропия максимальна при равной вероятности всех состояний источника информации:
N
Hmax(U) = -
n 1
(1/N) log (1/N) = log N.
Рис. 1.4.1.
5. Энтропия источника с двумя состояниями u 1 и u2 при изменении соотношения их
вероятностей p(u1)=p и p(u2)=1-p определяется выражением:
H(U) = -[p log p + (1-p) log (1-p)],
и изменяется от 0 до 1, достигая максимума при равенстве вероятностей. График изменения
энтропии приведен на рис. 1.4.1.
6. Энтропия объединенных статистически независимых источников информации равна сумме
их энтропий.
Рассмотрим это свойство на двух источниках информации u и v. При объединении источников
получаем обобщенный источник информации (u,v), который описывается вероятностями p(u nvm)
всех возможных комбинаций состояний un источника u и vm источника v. Энтропия объединенного
источника при N возможных состояниях источника u и М возможных состояниях источника v:
H(UV) = -
N
M
n 1
m 1
p(unvm) log p(unvm),
Источники статистически независимы друг от друга, если выполняется условие:
p(unvm) = p(un)p(vm).
С использованием этого условия соответственно имеем:
H(UV) = -
N
M
n 1
m 1
N
=-
n 1
p(un)p(vm) log [p(un)p(vm)] =
M
p(un) log p(un)
m 1
p(vm) -
m 1
N
С учетом того, что
n 1
N
M
p(vm) log p(vm)
n 1
p(um).
M
p(un) = 1 и
m 1
p(vm) = 1, получаем:
H(UV) = H(U) + H(V).
(1.4.3)
7. Энтропия характеризует среднюю неопределенность выбора одного состояния из ансамбля,
20
полностью игнорируя содержательную сторону ансамбля. С одной стороны, это расширяет
возможности использования энтропии при анализе самых различных явлений, но, с другой
стороны, требует определенной дополнительной оценки возникающих ситуаций. Как это следует
из рис. 1.4.1, энтропия состояний может быть неоднозначной, и если в каком-либо экономическом
начинании действие u с вероятностью pu=p приводит к успеху, а действие v с вероятностью pv=1-p
к банкротству, то выбор действий по оценке энтропии может оказаться и прямо
противоположным, т.к. энтропия при pv=p равна энтропии при pu=p.
Энтропия непрерывного источника информации должна быть бесконечна, т. к.
неопределенность выбора из бесконечно большого числа возможных состояний бесконечно
велика.
Разобьем диапазон изменения непрерывной случайной величины U на конечное число n малых
интервалов u. При реализации значений u в интервале (un, un+u) будем считать, что
реализовалось значение un дискретной случайной величины U', вероятность реализации которой:
p(un<u<un+u) =
u n Δuu
un
p(u) du p(un) u.
Энтропия дискретной величины U':
N
H(U') = -
n 1
p(un) u log (p(un) u).
Заменяем log (p(un) u) = log p(un)+log u, принимаем во внимание, что сумма p(un)u по
всем возможным значениям un равна 1, и получаем:
N
H(U') = -
n 1
p(un) u log p(un) – log u.
(1.4.4)
В пределе, при u 0, получаем выражение энтропии для непрерывного источника:
H(U) = -
log Δuu .
p(u) log p(u) du – lim
u 0
(1.4.5)
Значение энтропии в (1.4.5), как и ожидалось, стремится к бесконечности за счет второго члена
выражения. Для получения конечной характеристики информационных свойств непрерывных
сигналов используют только первый член выражения (1.4.5), получивший название
дифференциальной энтропии. Ее можно трактовать, как среднюю неопределенность выбора
произвольной случайной величины по сравнению со средней неопределенностью выбора
случайной величины U', имеющей равномерное распределение в диапазоне (0-1). Действительно,
для такого распределения p(un) = 1/N, u = 1/N, и при N из (1.4.4) следует:
log Δuu .
H(U') = - (log N)/N - log u - lim
u 0
Соответственно, разность энтропий дает дифференциальную энтропию:
h(U) = H(U) – H(U') = -
p(u) log p(u) du.
(1.4.6)
Дифференциальная энтропия не зависит от конкретных значений величины U:
h(U+a) = h(U), a = const,
но зависит от масштаба ее представления:
h(kU) = h(U) + log k.
Практика анализа и обработки сигналов обычно имеет дело с сигналами в определенном
интервале [a, b] их значений, при этом максимальной дифференциальной энтропией обладает
равномерное распределение значений сигналов:
h(U) = -
b
p(u) log p(u) du = log (b-a).
a
По мере сужения плотности распределения значение h(U) уменьшается, и в пределе при
p(u) (u-c), a<c<b стремится к нулю.
Информационная емкость сигналов существенно зависит от типа сигналов и
определяет требования к каналам передачи данных (каналам связи), равно как и технические
21
характеристики каналов связи определяют требования к информационной емкости сигналов,
передаваемых по этим каналам.
Для каналов передачи дискретных сигналов (дискретные канала связи) используют понятия
технической и информационной скорости передачи данных.
Под технической скоростью передачи подразумевают число элементарных сигналов
(символов), передаваемых по каналу в единицу времени. Простейший элементарный символ –
однополярный электрический импульс длительностью на тактовом интервале T. В дискретных
каналах используют, как правило, двуполярные импульсы, положительные на первой половине
интервала Т и отрицательные на второй половине. Это позволяет поддерживать нулевой
потенциал кабеля и выполнять тактовую синхронизацию приемо-передачи сигналов. Единицей
измерения технической скорости Vt = 1/T служит БОД – один символ в секунду. Полоса
пропускания канала связи обычно ограничивается определенной предельной частотой Fпред по
уровню затухания сигнала до уровня статистических помех, при этом значение технической
скорости передачи данных, естественно, не может быть выше Fпред без каких-либо специальных
устройств выделения информационных сигналов.
При известной технической скорости VT скорость передачи информации измеряется в
битах в секунду, и при уровне помех меньше амплитудных значений символьных импульсов
задается соотношением:
Vh = Vt H(s),
где H(s) – энтропия символа. Для двоичных дискретных символов с возможными состояниями
[0, 1] (однополярные – есть/нет импульс на такте, для двуполярных – порядок полярности
импульсов на такте, например, 0: плюс/минус, 1: минус/плюс) при постоянной амплитуде
импульсов значение H(s) равно 1. При числе L возможных равновероятных уровней амплитуды
импульсов (уровень помех меньше разности уровней амплитуд импульсов) значение H(s) равно
log L.
Информационная емкость сигнала или полное количество информации в сигнале S
(сообщении, кодовой последовательности/слове) определяется полным количеством N = t/T
энтропии символов в битах на интервале задания сигнала t:
It(S) = N log L = (t/T) log L.
(1.4.7)
Увеличение числа уровней L увеличивает пропускную способность каналов связи, но
усложняет аппаратуру кодирования данных и снижает помехоустойчивость связи.
Для непрерывных сигналов передача по каналам связи возможна только при условии, что
максимальная информационная частота в сигнале Fmax не превышает предельной частоты Fпред
передачи сигналов каналом связи. Для оценки информационной емкости непрерывного сигнала
выполним его дискретизацию с интервалом t = 1/2Fmax. Как установлено Котельниковым и
Шенноном, по мгновенным отсчетам непрерывного сигнала с таким интервалом дискретизации
аналоговый сигнал может быть восстановлен без потери информации. При полной длительности
сигнала Ts число отсчетов:
N = Ts/t = 2Fmax Ts.
Определим максимально возможное число выборок в каждом отсчете при наличии шума в
канале со средней мощностью Рш = 2. При средней мощности сигнала Ps = s2:
s2 δ2
s2
L=
=
.
1
δ2
δ2
Информационная емкость сигнала:
I(S) = 2Fmax Ts log L.
(1.4.8)
Информационные возможности сигнала возрастают с расширением его спектра и
превышением его уровня над уровнем помех.
22
Лекция№3
Обратная связь в усилительных трактах. Влияние обратной связи на
характеристики
и параметры
усилительного
тракта.
Активные
преобразователи (конверторы) сопротивлений.
3.1 Основные сведения и классификация
Обратная связь (ОС) в усилителе характеризует передачу на его вход
колебаний с выхода отдельного каскада или с выхода всего усилителя в
целом. Применение ОС позволяет улучшить характеристики усилителя.
По характеру передачи сигнала с выхода на вход различают:
внутреннюю ОС, образующуюся благодаря межэлектродным и
паразитным емкостям схемы и особенностям ВАХ активного элемента;
внешнюю ОС, которая организуется специальными цепями.
Элементы схемы, создающие ОС, образуют цепь ОС, которая
представляет собой чаще всего пассивный линейный четырехполюсник, вход
которого подсоединен к выходу усилителя, а выход – ко входу усилителя.
В зависимости от того, возрастает или уменьшается сигнал на входе
усилителя, обратные связи делятся на:
положительные (ПОС);
отрицательные (ООС);
комбинированные ОС (КОС).
В случае положительной обратной связи фаза действия сигнала обратной
связи (напряжения или тока) такова, что обратная связь увеличивает
коэффициент усиления усилителя. В случае отрицательной обратной связи
коэффициент усиления уменьшается. Комбинированная обратная связь
представляет собой совокупность положительной и отрицательной обратных
связей, петли которых имеют общие элементы. При использовании
комбинированной обратной связи в усилителях коэффициент усиления также
уменьшается, т.к. в этом случае преобладающее действие должна оказывать
отрицательная обратная связь.
Наибольшее применение в усилителях находит отрицательная обратная
связь, стабилизирующая работу усилителя и снижающая вносимые им
искажения.
Положительная обратная связь (только ПОС) в апериодических усилителях почти не применяется в основном из-за склонности схем с положительной обратной связью к самовозбуждению.
Комбинированная обратная связь применяется для компенсации выходных сопротивлений и искажений в усилителях. Совместное применение
положительной и отрицательной обратных связей позволяет использовать
преимущества этих видов связи и обеспечить устойчивость работы усилителя,
если соблюдается условие КЬоос > КЬпос.
1
Поскольку фаза как выходного сигнала, так сигнала с цепи ОС зависят от
частоты, то считать ОС положительной или отрицательной можно лишь в
некотором диапазоне частот. Сильное изменение частоты сигнала (за
пределы рабочей полосы усилителя) может привести к смене знака ОС.
В отношении частотного диапазона действия обратной связи различают:
а) обратную связь по переменному току как частотно-независимую
(b = const), так и частотно-зависимую (b = F(co));
б) обратную связь по постоянному току;
в) обратную связь по переменному и постоянному токам одновременно.
Частотно-зависимая отрицательная обратная связь применяется в усилителях, например, для коррекции частотных и переходных характеристик.
Отрицательная обратная связь по постоянному току используется для
стабилизации исходного режима транзисторов усилительных каскадов, а
также для стабилизации и линеаризации коэффициента усиления в усилителях
медленно изменяющихся сигналов (усилители постоянного тока УПТ).
Отрицательная обратная связь по переменному и постоянному токам
выполняет одновременно перечисленные функции.
В усилителях чаще всего специально вводят ООС в рабочей полосе частот.
С внутренней ОС мы встретились при анализе каскада с ОЭ, где транзистор
характеризовался параметром обратной связи h12,ээ. Как было показано,
отличие от нуля этого параметра приводит к зависимости от него всех
внешних параметров транзистора и усилителя в целом, например, влиянию
сопротивления нагрузки на входное сопротивление и сопротивления
источника сигнала на выходное сопротивление усилителя. В зависимости от
того, каким образом подается сигнал на вход усилителя с цепи ОС и в цепь
ОС с выхода усилителя, различают:
последовательную ОС по напряжению;
последовательную ОС по току;
параллельную ОС по напряжению;
параллельную ОС по току;
смешанная обратная связь.
Первое слово характеризует связь со входом усилителя: при
последовательной ОС с цепи ОС на вход усилителя подается напряжение, а
при параллельной - ток.
Второе слово характеризует связь цепи ОС с выходом усилителя: если
связь по напряжению, то выходной сигнал цепи ОС пропорционален
выходному напряжению, если связь по току, то выходной сигнал цепи ОС
пропорционален выходному току.
В случае смешанной по выходу обратной связи напряжение Uoc является
как функцией выходного напряжения U2, так и функцией выходного тока I1.
В случае смешанной по входу обратной связи напряжение обратной
связи вводится последовательно-параллельно и получается частично в
результате сложения напряжений U1 и Uoc, а частично в результате сложения
токов I1 и IОC.
2
По количеству петель обратной связи различают однопетлевую схему ОС
и многопетлевые схемы обратной связи.
На рис. 5.1 в качестве примера приведена структурная схема многопетлевой обратной связи. Здесь петля К1К2b является петлей общей обратной связи, а петли K1b1 и К2b2 — петлями местных обратных связей. В
данном случае все обратные связи могут быть отрицательными или некоторые
из них отрицательными, а другие положительными. В последнем случае
имеет место комбинированная обратная связь. Необходимо только
подчеркнуть, что общая обратная связь в усилителе всегда должна быть
отрицательной.
Рис. 5.1. Многопетлевая обратная связь
3.2 Основное соотношение
Обобщенная схема усилителя с ОС представлена на рис. 5.2.
Цепь, по которой осуществляется указанная обратная передача энергии,
называется цепью обратной связи. Замкнутая цепь, состоящая из охваченного обратной связью усилителя (или его части) К и цепи обратной
связи KОС, называется петлей обратной связи. К и KОС -коэффициенты
передачи усилителя и цепи обратной связи. Произведение K KОС называется
петлевым усилением или петлевым коэффициентом передачи. Петлевое
усиление определяет характер и степень действия обратной связи на
технические показатели усилителя.
Обычно цепь ОС представляет собой пассивную линейную цепь, т.к. она
не содержит каскадов усиления. Цепь К при коэффициенте гармоник Кг < 5%
может также считаться линейной.
Рис. 5.2
3
Пусть усилитель как активный линейный четырехполюсник задан
комплексным коэффициентом передачи
,
где
,
- комплексные амплитуды сигналов (тока или
напряжения) непосредственно на его входе и выходе, а четырехполюсник ОС
задан коэффициентом передачи
,
где
комплексная амплитуда сигнала на его выходе.
Определим комплексный коэффициент передачи эквивалентного
активного четырехполюсника как
,
где
комплексная амплитуда сигнала, поданного на вход системы
усилитель + цепь ОС.
Так как:
,
то получается, что:
.
(5.1)
Из соотношения (5.1) следует, что при к+ос=2n, n=0,± 1,± 2,… ,
коэффициент передачи усилителя с ОС равен:
.
(5.2)
Ясно, что его модуль больше модуля коэффициента передачи самого
усилителя и при KKос1 может стать бесконечно большим. Усилитель станет
практически неуправляемым.
Такая ОС называется положительной. Она используется для создания
автоколебательных систем. В усилителях же она может привести к
самовозбуждению на той частоте, для которой выполняется условие KKос=1.
При к+ ос=(2к+1) , к=0,± 1,± 2,…, коэффициент передачи может быть
записан в виде:
,
(5.3)
*
Откуда видно, что K <K . Такая ОС называется отрицательной.
Стоящая в знаменателе выражения (5.2) величина
называется
возвратной разностью и характеризует изменение коэффициента усиления К
за счет влияния обратной связи, как по абсолютному значению, так и в
4
отношении угла сдвига фаз. Величина KKОС, называется петлевым усилением
(а также петлевым коэффициентом передачи или коэффициентом передачи
разомкнутой системы), которое по существу и определяет свойства схемы с
ОС.
Абсолютная величина возвратной разности
А=|
|
называется глубиной обратной связи и определяет степень изменения
коэффициента усиления усилителя, вызываемого действием обратной связи.
Обычно эту величину выражают в децибелах как АДБ = 201gA.
Пример при ООС:
если K=100 и Kос=0,01, то KKос=1 (слабая ОС), K*=100/(1+1)=50;
если K=100 и Kос=0,09, то KKос=9 (глубокая ОС), K*=100/(1+9)=10.
3.3 Параметры усилителя с ООС
Рассмотрим вывод соотношений для коэффициентов передачи по
напряжению и току, входного и выходного сопротивления усилителя и с
цепью ООС в рабочей области частот усилителя.
Последовательная ООС по напряжению
Блок-схема такой системы представлена на рис.5.3
Рис.5.3
Для определения параметров усилителя с ОС удобно представить
усилитель в виде ИНУН, а цепь ОС в виде делителя напряжения (рис.5.4).
Рис.5.4
При соблюдении неравенств RГ ,эR2,эос<<Rвх , Rн ,R1,эос>>Rвых можно считать,
что
Um,эвх =EEm,эГ ,э Koc=ER2,эoc/(R2,эoc+R1,эoc) и I' m,эвыхIm,эвых .
Тогда:
5
откуда:
где индекс 0 означает принадлежность параметра собственно усилителю с
ОС без учета сопротивлений источника сигнала и нагрузки.
Коэффициент передачи по току определяется здесь как
.
Таким образом данный тип включения ООС изменяет собственный
коэффициент передачи по напряжению усилителя с ОС в соответсвиии с
основным линейным соотношением (5.3), коэффициент передачи по току
практически не изменяется.
По определению входное сопротивление усилителя с ОС равно:
.
Так как:
,
то:
,
(5.4)
то есть последовательная ООС увеличивает входное сопротивление
системы в (1+KKос) раз.
При определении выходного сопротивления генератор сигнала
закорачивается (Еm,эГ =E0 с сохранением его внутреннего сопротивления RГ ), а
вместо нагрузки включается эквивалентный источник тока с амплитудой
Im,ээкв=EIm,эвых , заменяющий действие входного источника. Получаем схему
рис.5.5.
Рис.5.5
По определению
.
6
Амплитуда выходного напряжения в схеме рис.4 определится как сумма
;
так как здесь U' m,эвх = – Um,эoc , то
Отсюда получаем
.
.
Таким образом ООС по напряжению уменьшает выходное сопротивление
усилителя с ОС в (1+KKос) раз.
Если неравенства RГ<<Rвх и Rн>>Rвых не выполняются, то формулы для
коэффициентов передачи, входного и выходного сопротивления несколько
усложняются.
В этом случае
Пример: каскад с общим коллектором (ОК)
последовательной ООС по напряжению (рис.5.6).
как
усилитель
с
Рис.5.6
Рис.5.7
На рис.5.7 показана схема этого каскада для переменных токов в области
средних частот. Схему рис.5.7 можно более явно представить в виде каскада
ОЭ со 100% последовательной ООС. Это видно из рис.5.8.
Рис.5.8
7
Из входной части рис.5.8 следует:
,
можно говорить о 100% (Koc=E1) последовательной ООС по
т.к. Um,эoc =EUm,ээ
напряжению.
Следовательно, коэффициент передачи по напряжению:
,
где SRэ=EKоэ – коэффициент передачи по напряжению каскада ОЭ, если в
коллекторной цепи стоит сопротивление равное Rэ ,э S – крутизна ДПХ
транзистора с ОЭ в рабочей точке;
Так, если SRэ=20, при Rэ=100 Ом и h11,ээ=200 Ом, имеем:
Kок=20/21=0,95 , Rвх,эок=200(1+20)=4200 Ом , Rвых,эок=100/(1+20)=4,76 Ом
Таким образом, каскад с ОК (или эмитерный повторитель) имеет очень
малое выходное сопротивление и большое входное сопротивление, в связи с
этим рабочая полоса частот его в (1+SRэ) больше полосы аналогичного
каскада с ОЭ. Поэтому этот каскад используют в качестве буферного между
каскадами ОЭ, осуществляя согласование по напряжению между каскадами.
Кроме того, его ставят в качестве входных каскадов усилителей, т.к. он имеет
большое входное сопротивление, и в качестве выходных каскадов
усилителей напряжения из-за малого выходного сопротивления.
Последовательная обратная связь по току
Обобщенная структурная схема приведена на рис.5.9.
Рис.5.9
При выполнении условий RГ ,э Rвых,эос<<Rвх , Rн >Rвых , Rвх,эос <<Rвых можно
считать, что U' m,эвых Um,вых , Im,вх ос =Im,вых ; тогда Um,эос=KocI m,эвых , причем Кос
имеет размерность сопротивления.
Выразим амплитуду напряжения ОС через амплитуду выходного
напряжения:
Тогда коэффициент передачи по напряжению системы будет иметь вид:
8
(5.6)
а входное сопротивление
.
(5.7)
Чтобы вывести соотношение для выходного сопротивления построим
эквивалентную схему (см. рис.5.10), где входное сопротивление цепи ОС
показано отдельно.
Рис.5.10
Отсюда:
(5.8)
Таким образом, последовательная ООС увеличивает входное и выходное
сопротивления усилителя с ОС, что позволяет использовать его как хороший
источник тока, управляемый напряжением (ИТУН).
Пример: каскад ОЭ с сопротивлением в эмиттерной цепи (ОЭ+Rэ). Схема
каскада приведена на рис.5.11.
Рис.5.11
Так как
,
а Im,эвых =Im,эк видим, что здесь имеет место последовательная ООС по току с
коэффициентом ОС Kос=ERэ ; т.к. Im,эб << Im,эк и Rвых,эок=Rк , можно считать
.
Отсюда получаем, учитывая что каскад с ОЭ имеет Kоэ=SRк ,
9
Обычно в схемах величину Rэ выбирают в пределах 10% от Rк .
Параллельная ООС по напряжению
При параллельной ООС на входе усилителя имеет место вычитание из
входного тока Im,эвх тока цепи ОС Im,эос. Обобщенная блок-схема показана на
рис.5.12.
Рис.5.12
Коэффициент передачи тока собственно усилителя
, а цепи
ОС
.
Естественно ожидать, что основное линейное соотношение (5.3) следует
применить к коэффициенту передачи по току. Действительно, при
выполнении неравенств Rвх,эос>>Rвых можно считать I' m,эвых=EIm,эвых . Поэтому
можно считать I m,эвых=EKi I'm,эвх ; в свою очередь
,
где Koc,эi=Koc,э1Rвых – коэффициент передачи по току цепи ОС.
Таким образом получаем
.
Из схемы рис.5.121 видно, что как со стороны входа, так и со стороны
выхода усилитель и цепь ОС соединены параллельно. Следовательно
входное сопротивление системы должно быть меньше собственного
входного сопротивления усилителя . Если провести выкладки, аналогичные
тому, как это было сделано выше, получим:
Таким образом, наилучшей моделью такой системы является модель
ИНУТ.
Пример: каскад с коллекторной ОС (рис.5.13).
10
Рис.5.13
Цепь ОС представляет собой резистор Roc , величина тока через который
пропорциональна выходному напряжению:
;
таким образом:
,
и коэффициент усиления по току усилителя с ОС и его входное и
выходное сопротивления равны:
.
Этот вид ОС используется не только по переменному сигналу, но и для
стабилизации рабочей точки транзистора.
Параллельная обратная связь по току
Обобщенная структурная схема приведена на рис.5.14.
Рис.5.14
Коэффициенты передачи тока усилителя и цепи ОС соответственно равны:
.
В этом случае по аналогии можно записать:
.
В качестве примера внутренней ОС подобного типа рассмотрим
транзистор с общей базой как транзистор с ОЭ и 100% ООС (рис.5.15).
11
Рис.5.15
Представим схему рис.5.15 в следующем виде:
Рис.14,б
Из рис.5.16 видно,что:
,
следовательно транзистор ОЭ охвачен ООС по току (Ki,эoc=1). Поэтому:
.
Часто каскад на транзисторе с ОБ называют токовым повторителем.
Входное и выходное сопротивление транзистора с ОБ соответственно равны:
Принципиальная схема простейшего каскада с ОБ представлена на
рис.5.17.
Рис.5.17
Здесь резисторы Rэ и Rк обеспечивают режим транзистора по постоянному
току. Коэффициент передачи по напряжению каскада такой же, как и у
каскада с общим эмиттером, однако он не инвертирует фазу, т.е. Kоб =+SRк ,
коэффициент передачи по току равен примерно единице, входное
сопротивление его мало, а выходное практически такое же, как у каскада с
ОЭ, т.к. Rк>>Rвых,эоб .
12
1.1. Влияние отрицательной обратной связи на частотные и фазовые
характеристики усилителя
Рассмотренный в предыдущих разделах случай, когда усилитель и цепь
ООС не вносят фазовых сдвигов, значения которых зависят от частоты,
является идеализированным. Реальный усилитель всегда вносит
дополнительные фазовые сдвиги. Они обусловлены наличием реактивных
элементов в цепях усилителя и инерционными свойствами транзисторов..
Поэтому реально коэффициенты ос и К — комплексные величины.
Если цепь ООС вносит небольшие фазовые сдвиги, то при осК К » 1
фазовый сдвиг усилителя с ООС существенно уменьшается и определяется в
основном фазовым сдвигом цепи ОС.
Пусть усилитель без ОС вносит фазовый сдвиг φ1 , тогда коэффициент
.
усиления усилителя K =E К еjφ1φ1 — комплексный. Фазовый сдвиг, вносимый
цепью ОС (φ2), во много раз меньше фазового сдвига усилителя.
Коэффициент усиления усилителя с ОС при осК » 1
Ke jφ1 1
1
jφ1 1
jφ1 2
Кос =E 1 Ke ос e
=E ос е-jφ1 φ2.
При φ2→ 0 фазовый сдвиг, вносимый усилителем с ООС, достаточно мал
и, в первом приближении, стремится к нулю.
При введении ООС в многокаскадном усилителе практически всегда
найдется участок частот, где ООС станет положительной. Поэтому в общем
случае глубина OOС ограничена областью, где в усилителе не возникают
автоколебания. Изменение сигнала ОС при изменении частоты можно
пояснить следующим образом. Пусть на некоторой частоте фазовый сдвиг,
вносимый усилителем, равен 180°, а цепь ОС не вносит фазового сдвига. В
этом случае входной сигнал и сигнал ОС находятся в противофазе, а
результирующий сигнал U1 совпадает с Uвх. (см. рис. 5.18, a).).
При изменении частоты входного сигнала изменяется фазовый сдвиг
напряжения на выходе усилителя и становится равным φ= 180+ φд, где φд —
дополнительный фазовый сдвиг, обусловленный изменением частоты
.
.
.
входного сигнала. Теперь векторы U ос , U вх и U 1
не совпадают по
направлению (рис. 5.18, б). Из входного сигнала вычитается только проекция
.
вектора U ос на горизонтальную ось. Вектор напряжения на входе усилителя
.
.
U 1 теперь не совпадает с U вх , но ОС при этом остается отрицательной — и
результирующий фазовый сдвиг усилителя с ОС меньше, чем без ОС. На
.
частоте, где φдоп достигает 90°, проекция вектора U ос на горизонтальную ось
.
равна нулю (рис. 5.18, в). В этом случае напряжение U ос не изменяет
.
горизонтальную составляющую вектора входного напряжения U 1 . На
.
частоте, где φдоп достигает 90°, проекция вектора U ос на горизонтальную ось
13
.
равна нулю (рис. 5.18, в). В этом случае U ос не изменяет горизонтальную
.
составляющую вектора входного напряжения U 1 . Тем не менее, на этой
частоте ОС меняет параметры усилителя. Так при малой глубине ООС
│Кос│ 1 цепь ООС практически не меняет фазового сдвига выходного
напряжения и он остается равным φ =E 180 + φдоп =E 270°. При │К ос│=E 1 цепь
ООС уменьшает дополнительный фазовый сдвиг выходного напряжения на
45° и он становится равным φ = 225°. При │Кос│»1 дополнительный
фазовый сдвиг φдоп стремится к нулю. На частоте, где φдоп > 90°, ОС из
отрицательной превращается в положительную (рис. 5.18, г), а векторы
входного сигнала и напряжения ОС суммируются. В последнем случае
нарушается устойчивая работа усилителя. По этой причине введение ОС в
усилитель требует проведения исследования его на устойчивость.
ju
ju
ju
u
U1
д
Uвх
д
u
ju
Uвх
Uвх u
u
Uвх
Uос
Uос -ju
U1
- ju
U1
- ju
Uос
U1
Рис.5.18. Изменение сигнала обратной связи при изменении частоты:
а) – отрицательная при φдоп = 0; б) – отрицательная при φдоп 0;
в) – обратная связь при φдоп = 90; г) – положительная обратная связь
На рис. 5.19, а, б приведены частотные и фазовые характеристики
двухкаскадного усилителя с обратной связью.
а)
б)
Рис. 5.19. Частотные характеристики двухкаскадного усилителя: а) АЧХ,
б) ФЧХ
Из рис. 5.19, а видно, что при определенных условиях амплитудночастотная характеристика становится немонотонной и наблюдается ее
подъем в области высоких частот (рис. 5.15, а). Этот подъем обусловлен тем,
что из-за фазовых сдвигов обратная связь становится положительной на
высоких частотах и увеличивает общий коэффициент усиления усилителя.
Чем больше будет дополнительный фазовый сдвиг в диапазоне частот, где
осК>1, тем сильнее будет влияние положительной ОС и тем больший
подъем будет иметь частотная характеристика (кривая Кос = 10).
Частотно-зависимая OOС изменяет частотную характеристику устройства
в которое она введена по закону, обратному закону изменения коэффициента
14
передачи цепи обратной связи при изменении частоты входного сигнала. Это
свойство OOС широко используется для коррекции частотной
характеристики широкополосного усилителя в области низких и высоких
частот, конструирования избирательных усилителей, активных фильтров и
т.д.
1.2. Влияние обратной связи на нелинейные искажения и помехи
С помощью OOС удается существенно уменьшить нелинейные
искажения, а также помехи, возникающие в усилителе.
Пусть усилитель при синусоидальном входном сигнале кроме
синусоидального напряжения Uвых имеет на выходе также напряжение
гармоники или помехи – Uг. Введем в усилитель обратную связь, как
показано на рис. 1.11. Тогда для сохранения неизменного выходного
напряжения и выходной мощности входное напряжение потребуется
изменить в (1 + осК) раз.
Обозначим напряжение гармоники или помехи на выходе усилителя с
1
введенной обратной связью через U Г . Тогда, если считать усилитель
квазилинейной системой и пренебречь составляющими высших порядков в
1
выходной цепи, получим, что U Г должно быть равно сумме напряжения UГ,
1
создаваемого усилителем, и напряжения U Г , прошедшего через цепь
обратной связи, входную цепь и усилитель, а, следовательно, помноженного
на осК.
U 1Г =E U – К U 1Г .
Г
ос
Отсюда находим
Uг
U 1Г
1 ос К
.
Таким образом, ООС уменьшает искажения, возникающие в усилителе во
столько раз, во сколько изменяется коэффициент усиления усилителя.
Однако, если выходной ток усилительного элемента достигает тока
насыщения или нуля, то усилитель становится нелинейным. В этом случае
уменьшение искажения не произойдет, так как теория ООС справедлива
лишь для усилителей, работающих в линейном режиме.
Следует заметить, что ООС уменьшает в 1 + осК раз фон переменного
тока, а также и другие помехи, возникающие внутри усилителя.
3.6. Характеристики усилителей с ООС
Введение ООС в усилительные схемы приводит к ряду положительных
результатов. Рассмотрим некоторые из них.
Стабилизация коэффициента передачи
Пусть усилитель без ООС имеет коэффициент передачи K, нестабильность
его, обусловленная различными дестабилизирующими факторами,
оценивается величиной K. Тогда при использовании ООС в соответствии с
основным линейным соотношением можно записать:
15
Поскольку в цепях ОС обычно используются достаточно стабильные
линейные пассивные элементы, Koc можно считать величиной постоянной.
Поэтому:
Таким образом нестабильность усилителя
нестабильности усилителя без ООС.
При глубокой ООС, т.е. при KKoc>>1 , имеем:
с
ООС
K
*
.
меньше
.
Следовательно, усилитель с глубокой ООС, имеет коэффициент передачи,
определяющийся только цепью ОС, и поэтому очень стабилен.
Ослабление нелинейных искажений
Нелинейные искажения в усилителе обусловлены выходом мгновенных
значений сигналов за пределы линейной части амплитудной характеристики
усилителя Um,эвых(Um,вх).
Поскольку введение отрицательной ОС уменьшает коэффициент передачи
в (1+KKос) раз, во столько же раз может быть увеличено входное напряжение,
соответствующее началу нелинейного участка амплитудной характеристики.
На рис.5.20 показаны амплитудные характеристики усилителя без ООС и с
ООС.
Рис.5.20
Частотные характеристики усилителя с ООС
Самое наглядное представление о влиянии на АЧХ ООС дает пример с
глубокой
ООС.
Пусть усилитель без ОС имеет частотный коэффициент передачи
, а
цепь ОС -
. Тогда при ООС:
При K()Koc(w )>>1 в достаточно широкой полосе частот, имеем
Если цепь ОС состоит из резисторов, то при глубокой ООС можно
получить частотную характеристику усилителя с равномерной АЧХ в
широкой полосе частот. В качестве примера можно вспомнить каскад с ОК,
который имеет K*=1 из-за глубокой (100%-ной) ОС, и следовательно очень
широкую полосу частот. Принято считать для данного типа активного
16
элемента постоянной величину произведения коэффициента усиления в
рабочей области на полосу частот этой области. Если каскад при полосе f
имеет Kо , то для него является постоянной величина П= Kо f . При
уменьшении Kо полоса f увеличивается и наоборот. Это отражено на
рис.5.21, где Kо(fв-fн)=K*o(f*в-f*н).
Рис.5.21
В современной схемотехнике ОС используются очень широко. Часто
применяют несколько цепей ОС, охватывая ими или отдельные каскады или
цепочки каскадов. Знание теории ОС позволяет выявить появление
возможных паразитных положительных ОС, приводящих к неустойчивой
работе усилителя, и успешно бороться с этим явлением.
Ряд современных усилителей, называемых операционными, применяются
только с использованием различных ООС, что позволяет получать
устройства с заданными характеристиками.
Таблица
В таблице даны основные параметры схем с отрицательными обратными связями.
Тип ОС
Последоват.
Последоват.
Параллельная
Параллельная
ООС
по ООС по току
ООС по напряжению ООС по току
напряжению
K*
K
K*i
Ki
Ki
R*вх
Rвх(1+KKос)
Rвх(1+KKос)
R*вых
Модель
Идентификаци
я типа ОС
Rвых(1+KKос)
ИНУН
ХХ на входе
КЗ на выходе
ИТУН
ХХ на входе
ХХ на
выходе
17
K
Rвых (1+Kос,iKi)
ИНУТ
ИТУТ
КЗ
на
входе
КЗ на выходе
КЗ
на
входе
ХХ на выходе
Лекция 2
Усиление сигналов. Электронные усилители, общие характеристики и классификация.
Определение электронных усилителей. Статистические и динамические режимы усилительных
каскадов. Схемы включения каскадов на биполярных и полевых транзисторах. Усилители с
емкостной связью. Анализ влияния дестабилизирующих факторов на работу усилительных
каскадов. Анализ влияния комплексного характера источника сигнала и нагрузки на работу
усилительных каскадов. Многокаскадные усилители. Способы реализации межкаскадных
связей.
2. УСИЛИТЕЛИ И ФОРМИРОВАТЕЛИ ЭЛЕКТРИЧЕСКИХ СИГНАЛОВ НА
БИПОЛЯРНЫХ И ПОЛЕВЫХ ТРАНЗИСТОРАХ. УСИЛИТЕЛИ ЭЛЕКТРИЧЕСКИХ
СИГНАЛОВ
1.1. Общие сведения об усилителях электрических сигналов, их основных
параметрах и характеристиках
Усилителем называется устройство, предназначенное для увеличения
мощности входного сигнала. Превышение мощности, выделяемой в
сопротивлении нагрузки, над мощностью источника входного сигнала
достигается за счет энергии источника питания. Маломощный входной сигнал
лишь управляет передачей энергии источника питания в полезную нагрузку.
Усиление электрических сигналов практически всегда сопровождается
изменением их формы. Причем качество усилителя считается тем более высоким,
чем меньше нежелательные искажения сигналов.
Часто бывает удобно рассматривать не мощность сигналов на входе или
выходе усилителя, а величины напряжений или токов. В связи с этим усилители
условно делят на усилители тока, усилители напряжения или мощности.
Принадлежность усилителя к тому или иному классу определяется его
назначением и выбором соответствующих параметров схемы и усилительных
элементов.
По характеру изменения усиливаемого сигнала во времени различают
усилители медленно меняющихся сигналов, которые часто называют усилителями
постоянного тока, и усилители переменного тока. К ним относятся усилители
низкой частоты, усилители высокой частоты, широкополосные усилители,
избирательные усилители и т.д.
Классификация усилителей.
1. По характеру усилительных сигналов
а) гармонические (только синусоидальные).
б) импульсные (только импульсный сигнал).
в) постоянного тока (для частот близких к нулю герц).
г) радиотехнические (переменного тока).
д) низкочастотные (НЧ) от 10 до 100 тысяч Гц..
е) промежуточно-частные от 465 кГЦ до 10,7 МГц.
ж) высокочастотные (ВЧ) для радиочастот с частотой от 1000 кГц и выше.
з) широкополосные (применяются в измерительной технике и осциллографах).
Они усиливают в широкой полосе частот от 0 до нескольких МГц
и) избирательные или селективные(усиливают сигнал в узком диапазоне
1
частот)
2. В зависимости от типа преобразования сигнала
а) прямого усиления (в них сигнал усиливается без преобразования по частоте)
б) усилители с преобразованием частоты.
Усилители имеют определенные параметры и характеристики. Одним из
основных параметров усилителя является его коэффициент усиления, который
представляет собой отношение параметров выходного сигнала к входному. Так,
U вых
коэффициент усиления по напряжению КU = U , коэффициент усиления по
вх
I вых
Pвых
току КI = I , коэффициент усиления по мощности КP = P .
вх
вх
В частном случае, когда входное и выходное значения сигнала являются
неоднородными, вместо коэффициента усиления используется коэффициент
I вых
преобразования. Например, S = U — коэффициент
вх
преобразования входного
Pвых
напряжения в выходной ток, называемый часто крутизной усиления; W = I
вх
— коэффициент преобразования тока в мощность.
Коэффициенты усиления часто оценивают в логарифмических единицахдецибелах
U вых
КU дб = 20 lg U ,
вх
I вых
КI дб = 20 lg I ,
вх
Pвых
КP дб = 10 lg P .
вх
В логарифмических единицах обычно задают коэффициент усиления
многокаскадного усилителя, который равен сумме коэффициентов усиления его
отдельных каскадов, выраженных в дб.
К основным характеристикам усилителя относятся: амплитудная, амплитудночастотная, фазо-частотная, амплитудно-фазовая и переходная характеристики.
Амплитудная характеристика представляет собой зависимость амплитудного
или действующего значения выходного напряжения от входного напряжения U вых
= f (Uвх) (Рис.2.1). Уменьшение коэффициента усиления при больших входных
сигналах определяется нелинейностью характеристик усилительных элементов —
транзисторов. По амплитудной характеристике усилителя определяют
динамический диапазон усилителя
U вых макс
.
вых мин
D = 20 lg U
2
Рис. 2.1. Амплитудная характеристика усилителя
Динамический диапазон усилителя ограничивается с одной стороны уровнем
собственных шумов и помех, наблюдаемых на выходе усилителя, а с другой –
допустимым уровнем нелинейных искажений, т.е. предельно допустимым
значениям Uвых maхх.
Амплитудно-частотная характеристика усилителя (АЧХ) – определяется как
зависимость модуля коэффициента усиления усилителя от частоты входного
сигнала (рис.2.2). По АЧХ определяют полосу пропускания усилителя, т.е.
рабочий диапазон частот, в пределах которого коэффициент усиления изменяется
не больше заданного.
Рис. 2.2. Амплитудно-частотная характеристика усилителя
Если к усилителю не предъявляются какие-либо специальные требования, то
рабочий диапазон частот определяют на уровне 0,7 Кмакс (рис. 2.2). АЧХ
большинства широкополосных усилителей не удается изобразить в линейном
масштабе по оси частот. Поэтому для них чаще всего пользуются
полулогарифмическим масштабом.
Фазо-частотная характеристика представляет собой зависимость угла сдвига
фазы между выходным и входным напряжениями от частоты входного сигнала.
(рис. 2.3).
Рис.2.3. Фазо-частотная характеристика усилителя
3
В ряде случаев для наглядности строят раздельно фазовые характеристики для
области низких и области высоких рабочих частот усилителя. Фазовые сдвиги в
усилителях обусловлены наличием реактивных элементов и инерционными
свойствами полупроводниковых приборов. Из приведенного рис. 2.3 видно, что в
области средних частот, на которых можно пренебречь влиянием реактивных
элементов, присутствующих в схеме усилителя, фазо-частотная характеристика
линейна.
Амплитудно-фазовая характеристика (на Западе ее часто называют диаграммой
Найквиста)— это построенная в полярной системе координат зависимость
коэффициента усиления и фазового сдвига усилителя от частоты (рис. 2.4).
Рис. 2.4. Амплитудно-фазовая характеристика усилителя
Она объединяет в себе амплитудно-частотную и фазо-частотную
характеристики усилителя. Для построения этой характеристики определяют
коэффициент усиления и фазу выходного напряжения в функции частоты.
Каждой частоте соответствует на плоскости точка в полярных координатах. При
непрерывном изменении частоты от 0 до в полярной системе координат
строится кривая, которая и называется амплитудно-фазовой характеристикой.
Амплитудно-фазовая характеристика используется для определения устойчивости
усилителей с обратной связью. Так, в соответствии с критерием Найквиста,
усилитель с замкнутой цепью обратной связи устойчив, если амплитудно-фазовая
характеристика вектора коэффициента разомкнутой петли обратной связи не
охватывает точку (-1, j0 ) и не проходит через нее.
Переходная характеристика (см. рис. 2.5) используется при анализе
импульcных усилителей. ных усилителей.
Рис. 2.5. Переходная характеристика усилителя
Данная характеристика представляет собой зависимость мгновенного значения
выходного напряжения или тока от времени при действии на входе единичного
скачка напряжения или тока. Переходная характеристика дает представление о
прохождении сигналов сложной формы через усилитель. Так, при усилении
импульсного сигнала прямоугольной формы, происходит увеличение
4
длительности фронта импульса и снижении его вершины. Указанные изменения
формы сигнала вызваны происходящими в схеме усилителя переходными
процессами.
Экспериментально переходную характеристику усилителя можно получить на
экране осциллографа, если подать на его вход прямоугольный импульс
напряжения определенной длительности, а выход усилителя подключить к
осциллографу.
1.2. Искажения в усилителях
При усилении электрических сигналов должна сохраняться их форма.
Отклонение формы выходного сигнала от формы сигнала, подаваемого на его
вход, называется искажением. В усилителях различают два вида искажений —
линейные и нелинейные.
Форма сложного сигнала на выходе усилителя, работающего в линейном
режиме, будет отличаться от формы входного сигнала в том случае, если
гармонические составляющие входного сигнала будут усиливаться в усилителе
неодинаково, а также, если вносимые усилителем фазовые сдвиги будут
различными для отдельных гармонических составляющих. Вызываемые
указанными причинами изменения формы выходного сигнала называют
соответственно частотными и фазовыми искажениями.
При усилении синусоидального сигнала с неизменной частотой вопрос
линейных искажений не играет большой роли: на одной определенной частоте
всегда можно добиться достаточного усиления, а фазовые сдвиги
скомпенсировать. Проблема линейных искажений возникает тогда, когда сигнал
имеет более или менее сложную форму. Для такого сигнала фазочастотные
искажения не менее, а часто более существенны, чем амплитудно-частотные.
Фазочастоные искажения отсутствуют при отсутствии относительного сдвига
гармоник. Для этого должно соблюдаться условие φn = n φ1
Это условие выполняется, если фазо - частотная характеристика линейна φ =
a, так как тогда
φ1 = a1, φn = an = an1= n φ1.
Таким образом, для отсутствия фазо-частотных искажений не обязательно
отсутствие фазового сдвига от частоты. Для отсутствия амплитудно-частотных
искажений требуется независимость коэффициента усиления от частоты.
Оценкой линейных искажений в области средних частот, на которых можно
пренебречь влиянием реактивных элементов, служит коэффициент частотных
К max
искажений М = K , где Кmax — коэффициент усиления на средних частотах; Кi
i
— коэффициент усиления на исследуемой частоте. Обычно задают M 2 . В
n
многокаскадном усилителе Mn = П M i
i 1
В усилителях импульсных сигналов линейные искажения обусловлены
переходными процессами установления токов и напряжений в цепях, содержащих
реактивные элементы. Действительно, для всех импульсов характерным является
то, что они состоят из участков с резко различными скоростями их изменения.
При усилении такого сигнала будет иметь место переходной процесс. Поэтому
5
основной характеристикой импульсного усилителя является переходная
характеристика — eе реакция на сигнал ступенчатой формы. е реакция на сигнал ступенчатой формы.
Линейные искажения импульсного сигнала проявляются в неточной передаче
участков с большой и малой скоростью их изменения. Искажения крутых
участков сводится к запаздыванию (временному сдвигу) и уменьшению крутизны
фронтов, а искажения пологих участков — к спаду вершины импульса.
Величинами, характеризующими импульсные искажения, являются время
запаздывания, время нарастания фронта и время спада вершины, определяемые по
переходной характеристике.
Для оценки искажений фронтов используется переходная характеристика в
области малых времен (рис. 2.6, а), а для оценки искажений вершины импульсов
— переходная характеристика в области больших времен (рис. 2.6, б). Указанные
характеристики отличаются масштабом по оси времени.
Искажения фронта импульса характеризуют временем установления tу, в
течение которого выходной сигнал нарастает от уровня 0,1 до уровня 0,9
установившегося значения
tу = t0,9 – t0,1
Время установления в усилителях импульсных сигналов можно определить
как
tу = 2,2в = 2,2/в = 2,2/2fв = 0,35/fв
где fв — верхняя граничная частота усилителя.
В многокаскадном (в трехкаскадном) усилителе время установления:
tу = t у 1 2 t у 2 2 t у 3 2
Выброс фронта оценивается как разность между максимальной и
установившейся ординатами переходной характеристикой δ = yмакс –1. Искажения
вершины усиливаемых импульсов оценивают относительной величиной
изменения ординаты (обычно в процентах) в течение длительности
прямоугольного импульса tи. Искажение вершины импульсных сигналов можно
tи
определить из выражения ≈ , где tи — длительность входного сигнала,
1
1 – постоянная времени переходной цепи.
а)
б)
Рис. 2.6. Переходная характеристика: а) в области малых времен, б) в области
больших времен
В многокаскадном (например, в трехкаскадном) усилителе искажение вершины
импульсного сигнала на выходе усилителя
6
= 1+ 2+ 3.
В отличие от линейных искажений, нелинейные искажения в усилителях
обусловлены наличием нелинейных элементов, в первую очередь транзисторов, а
также других элементов с нелинейными вольтамперными характеристиками —
ВАХ.
При входном сигнале синусоидальной формы нелинейные искажения
проявляются в том, что выходной сигнал не является синусоидальным.
Разложение выходного сигнала в ряд Фурье позволяет определить основную
гармонику, имеющую частоту входного сигнала, и ряда высших гармоник.
Величина нелинейных искажений в случае синусоидального сигнала на входе
усилителя оценивается коэффициентом нелинейных искажений:
2
A ,
n
KГ
n 2
A1
где n — номер гармоники;
aхn — действующее или амплитудное значение соответствующей гармоники
выходного тока или напряжения.
Сигнал сложной формы, очевидно, сам состоит из ряда гармоник. Поэтому его
нелинейные искажения проявляются либо в возникновении дополнительных
гармоник, либо (в случае бесконечного ряда гармоник на входе) — в изменении
спектрального состава гармоник, т.е. соотношения их амплитуд.
Следует отметить, что между линейными и нелинейными искажениями
существует связь, несмотря на их различное происхождение. Пусть, например, в
каком-либо промежуточном каскаде усилителя возникли нелинейные искажения,
т.е. появились высшие гармоники. Эти гармоники могут быть либо
дополнительно подчеркнуты, либо частично подавлены, в зависимости от вида
частотных характеристик последующих каскадов.
Полное отсутствие нелинейных искажений в усилителе принципиально
невозможно, учитывая, что в усилителях используются такие усилительные
элементы, как биполярные или полевые транзисторы.
На рис. 2.7 а, б приведены примеры возникновения нелинейных искажений,
обусловленные нелинейностью ВАХ биполярного транзистора. Из графиков
видно, что при подаче на базу транзистора входного напряжения синусоидальной
формы входной ток базы будет отличаться от синусоиды. Это отличие будет
зависеть от выбора исходного режима работы транзистора и в значительной
степени от амплитуды входного сигнала. Из приведенного рисунка видно, что
минимальные нелинейные искажения могут быть получены при выборе рабочей
точки в области сравнительно малой нелинейности входной характеристики и при
малом входном сигнале.
Нелинейность выходных характеристик также является причиной изменения
формы выходного сигнала. Как известно, выходные характеристики транзистора
сгущаются в области больших токов, что также является причиной искажения
выходного сигнала.
7
а)
б)
Рис. 2.7. Нелинейные искажения сигналов вследствие: а) – нелинейности
входной характеристики транзистора; б) – нелинейности выходных характеристик
транзистора
Наличие нелинейных искажений при любой форме сигнала можно определить
по нелинейности амплитудной характеристики. Однако, следует иметь в виду, что
амплитудная характеристика малопригодна для количественных оценок. При
малых искажениях уменьшение амплитуды трудно оценить из-за неточностей
графического построения. При больших искажениях форма выходного сигнала
может быть настолько искажена, что сравнение только амплитуд оказывается
недостаточным для общей оценки искажений. Поэтому амплитудная
характеристика удобна лишь для приблизительного определения границы
линейности. Определение коэффициента нелинейных искажений для
синусоидального сигнала осуществляется либо экспериментально с помощью
специального прибора, либо графически.
2.3 УСИЛИТЕЛЬНЫЕ КАСКАДЫ НА БИПОЛЯРНЫХ ТРАНЗИСТОРАХ
2.3.1 Выбор режима работы транзистора
Усилители электрических сигналов часто выполняют на биполярных или
полевых транзисторах. Для работы любого усилителя необходимо при отсутствии
входного сигнала установить соответствующий режим работы транзистора по
постоянному току. В зависимости от выбранного режима работы усилителя по
постоянному току различают следующие режимы его работы: режим А; режим
В; промежуточные режимы, например АВ.
Режим А — это режим работы усилителя, при котором ток через транзистор
протекает в течение всего периода входного сигнала. В режиме А амплитуда
переменной составляющей выходного тока не может превышать тока покоя в
статическом режиме. Режим А характеризуется малыми нелинейными
искажениями и низким КПД, поэтому его используют в усилителях
предварительного усиления и маломощных выходных каскадах.
В режиме В ток покоя равен нулю и ток через транзистор протекает в течение
лишь половины периода входного синусоидального сигнала. Обычно этот режим
использует в двухтактных схемах усилителей, так как при синусоидальном
входом сигнале в однотактном усилителе в режиме В возникает значительно
нелинейные искажения. Для уменьшения уровня нелинейных искажений
использует промежуточный режим АВ, который отличается от режима В
наличием постоянной составляющей в статическом режиме.
8
Рассмотрим простейшую схему усилителя на транзисторе, включенным по
схеме с общим эмиттером (рис. 2.8). Схема содержит два источника питания.
Один из них включен в цепь базы транзистора и задает входной базовый ток.
Второй источник является источником питания коллекторной цепи.
Rбб
Iкк
Rбк
Uгг
Еб
Ек
Рис. 2.8. Схема усилительного каскада по схеме ОЭ
Так как в цепи коллектора включен резистор RК, то изменение тока коллектора
будет определяться не только изменениями тока базы, но и изменениями
напряжения Uкэ
Uкэ = Ек – IкRк ,
или
Iк = Ек/Rк – Uкэ/Rк .
Полученное выражение представляет собой уравнение отрезка прямой, или
линии нагрузки. Линию нагрузки можно построить по двум точкам на семействе
выходных характеристик транзистора (см. рис. 2.9).
1. Uкэ = Ек при Iк = 0,
2. Iк = Ек / Rк при Uкэ = 0.
На линии нагрузки выбирается рабочая точка 0. Для определения положения
рабочей точки необходимо найти координаты пересечения линии нагрузки с
выходной характеристикой транзистора, соответствующей определенной
величине тока базы.
Рабочая точка с координатами Iок, Uок выбирается исходя из режима, в котором
должен работать транзистор, а также из заданных амплитуд выходного
напряжения Um и связанного с ним nока Im. Так если усилительный каскад должен
работать в режиме А, то при малом входом сигнале (несколько милливольт)
рабочую точку транзистора выбирает, исходя из соображения экономичности, а
также получения от каскада требуемого усиления.
Рис. 2.9. Построение линии нагрузки
При работе с большими сигналами рабочая точка выбирается ближе к середине
линии нагрузки так, чтобы обеспечить получение требуемой амплитуды
выходного напряжения при допустимых нелинейных искажениях и по
9
возможности высоком КПД. Режим работы транзистора выбирается при этой
таким образом, чтобы удовлетворялись неравенства Uок>UUm, и Iок>U Im. Кроме того,
требуется, чтобы напряжения, токи и мощности, рассеиваемые на транзисторе, не
превышали предельно допустимых значений:
Uо + Um < Uмакс д;
Iо + Im < Iмакс д;
UоIo < Рмакс д
При работе усилителя в режиме В рабочую точку выбирают в нижней части
линии нагрузки. При этом Im < Iмакс д; Um < Uмакс д; где Iмакс дUмакс д, —
предельнодопустимые значения тока и напряжения транзистора (справочные
данные).
При подключении нагрузки к усилителю через разделительный конденсатор,
линия нагрузки пойдет круче, так как ее наклон будет определяться величиной
сопротивления RН =Rн||Rк (см. рис. 2.9).
Выбрав рабочую точку на линии нагрузки — точка 0 на рис.2.2 определяем ток
покоя Ioк, напряжение между коллектором и эмиттером — Uoк и величину
сопротивления резистора Rк, т.к. наклон линии нагрузки определяется величиной
этого сопротивления
tg = Iк/Rк = –1/Rк
Начальное положение рабочей точки на линии нагрузки» как указывалось
выше, определяется величиной базового тока Iбо во входной цепи.
1.2.1. Стабилизация рабочей точки
Необходимый режим работы транзистора устанавливается путем подачи на
базу транзистора относительно его эмиттера напряжения смещения, которое в
зависимости от типа транзистора и режима его работы может иметь величину
порядка 0,1 – 0,6 В. Смещение можно задать либо включением специального
источника Еб, как показано на рис. 2.8, либо использовать один источник питания
Чаще всего для цепи смещения и коллекторной цепи используется один
источник питания. На рис. 2.10, а) показан способ подачи смещения в базовую
цепь с помощью делителя напряжения, состоящую из резисторов R1 и R2.
Тогда напряжение
R2
Uэб = Ек R R .
1
2
Из рассмотрения семейства входных характеристик транзистора следует, что
небольшое изменение напряжения Uэб относительно Uэбо в рабочей точке,
приводит к значительному изменению коллекторного тока. Так как неизбежен
разброс параметров транзисторов, то для обеспечения одного и того режима по
постоянному току для каждого транзистора необходимо индивидуально
проводить регулировку с помощью резистора R2. Следует также отметить, что
данная схема особенно чувствительна к температурному дрейфу. Напряжение
база-эмиттер, соответствующее коллекторному току Iок, изменяется на 2 мВ при
изменении температуры на одни градус. Это обстоятельство можно учесть, если
последовательно с источником входного сигнала в базовую цепь транзистора
включить фиктивный источник, напряжение которого при комнатной температуре
равно нулю и увеличивается на 2 мВ при повышении температуры на один
10
градус. Транзистор при этом рассматривается как идеальный, не имеющий
температурного дрейфа.
При отсутствии входного сигнала введенный источник приведет к следующему
изменению потенциала коллектора транзистора
Uк = К 2мВ/oC = 200 2мВ/oC,
если коэффициент усиления равен 100
Повышение температуры на 20°C приведет к изменению потенциалаC приведет к изменению потенциала
коллектора примерно на 4 В. Такое большое изменение напряжения на
коллекторе транзистора является недопустимо большим.
Влияние напряжения Uэб на потенциал коллектора можно устранить, если
установить рабочую точку с помощью стабильного базового тома, как показано
на рис. 2.10, б). Этот ток будет протекать по резистору R1 сопротивление которого
R1
Eк U эб Eк
,
Iб
Iб
так как в реальных схемах напряжение питания Ек выбирается много больше
напряжения эмиттер–база транзистора. Это в значительной мере устраняет
источник дрейфа, связанный с температурной зависимостью напряжения Uэб.
Однако коллекторный ток для схемы 2.10, б.
I к
Eк U эб
R1
пропорционален значению коэффициента усиления по току .
Е
Е
Rб1
Rбк
Rб1
C
Rбк
C
Uгвх
Uгвых
Uгвых
Uгвх
Rб2
Рис. 2.10. Способы задания базового тока в статическом режиме: а) –
фиксированным напряжением на переходе база – эмиттер, б) – фиксированным
током
Если величина транзистора изменится, например в 5 раз за счет установки
другого транзистора, то и коллекторный ток изменится в 5 раз. Необходимо
учитывать также температурную зависимость коэффициента усиления по току ,
который увеличивается на 1 % при повышении температуры на один градус.
В схеме рис. 2.10 а коллекторный ток также прямо пропорционален значению
Eк
I к I б
R2
U эб
R1 R2
R1 R2
При использовании германиевых транзисторов заметное влияние начинают
оказывать обратные коллекторные токи, которые на несколько порядков больше,
чем у кремниевых транзисторов.
Для схемы с общим эмиттером
Iк = Iб + Iко(1 + ).
11
Ток Iко увеличивается примерно в два раза при повышении температуры на
каждые 7-8 С. Изменение теплового тока Iко также будет сказываться на
положении рабочей точки на линии нагрузки при использовании германиевых
транзисторов.
Следовательно, рассмотренные схемы не обеспечивают хорошей стабильности
коллекторного тока.
Для стабилизации положения рабочей точки на. линии нагрузки в схемах
усилителей применяется отрицательная обратная связь по постоянному току или
напряжению, как показано на рис. 2.11 а, б.
Ек
Ек
Rбк
Rб1
Rбк
Rбб
Uгвых
C
Uгвх
Uгвх
Rб2
Rбэ
Uгвых
С
Сэ
Рис. 2.11. Схемы стабилизации рабочей точки: а) – схема эмиттерной
стабилизации, б) – схема коллекторной стабилизации
В схеме рис. 2.11, а стабилизация режима осуществляется при помощи ООС по
постоянному току через эмиттерный резистор (эмиттерная стабилизация). Ток
коллектора в этой схеме с изменением температуры изменяется очень мало, так
как увеличение тока эмиттера вызывает уменьшение разности потенциалов базаэмиттер, что препятствует увеличению тока коллектора. В стабилизированной
схеме ток коллектора таким образом изменяется в значительно меньшей степени.
Блокировочный конденсатор Сэ исключает ООС по переменному току, сохраняй
высокое значение коэффициента усиления для быстро изменяющихся сигналов.
Схема эмиттерной стабилизации удобна тем, что в ней можно раздельно
управлять режимом работы усилителя и его стабилизацией. При правильном
выборе элементов она обеспечивает достаточно высокую стабилизацию рабочей
точки в широком температурном диапазоне.
Схема рис. 2.11, б отличается от схемы, рассмотренной ранее тем, что
резистор Rб подключен не к источнику питания, а к коллектору транзистора.
Сопротивление резистора Rб
U
U U бэ U ок
Rб кб ок
.
Iб
I бо
I бо
Стабилизация режима в этой схеме осуществляется при помощи ООС по
напряжению (схема коллекторной стабилизации). Действительно, с увеличением
температуры окружающей среды увеличивается Iк, а Uкб соответственно
уменьшается. При этом будет уменьшаться и ток базы. Уменьшение Iб приводит к
уменьшению Iк, который стремится возвратиться к току покоя Iок. В результате Iок
и Uок изменяются незначительно.
12
Рассмотрим схему с эмиттерной стабилизацией рис. 2.11, а. Пренебрегая
величиной обратного тока Iок, можно записать следующее выражение для
коллекторного тока
R2
I к I б Е
U эб
.
R1 R2
R1 || R2 Rэ (1 )
В этом выражении имеется как в числителе, так и в знаменателе. Если
значения сопротивлений резисторов Rэ, R1 и R2 выбрать таким образом, что
RЭ(1+)»R1||R2 , то зависимостью коллекторного тока от можно пренебречь.
R
E 2 U эб
R1 R2
.
I к I б
Rэ
Для расчета резистора Rэ можно использовать следующее приближенное
эмпирическое правило: падение напряжения на резисторе Rэ при заданном
коллекторном токе должно лежать в пределах 1- 2 В или Rэ ≈ 0,2 Rк. После того,
как величина Rэ выбрана, сопротивления резисторов R1 и R2 могут быть найдены
из условия
мин 1 Rэ R1 || R2 5Rвх э 5
макс
,
I к / Т
где макс, мин — наибольшая и наименьшая ожидаемые величины , а Iк макс —
наибольшее допустимое значение коллекторного тока.
В результате для
большинства практических применений рабочая точка оказывается достаточно
стабильной к изменениям как , так и напряжения Uэб.
Хотя схема смещения, показанная на рис. 2.11, а оказывается удобной для
однокаскадного усилителя, она редко используется в усилителе, состоящем из
нескольких каскадов. Включение конденсатора связи между каждой парой
усилителей и блокировочных конденсаторов приводит к двум нежелательным
эффектам: во-первых, возрастает стоимость устройства, и, во-вторых, заметно
падает коэффициент усиления схемы на низких частотах. Поэтому в
многокаскадных усилителях применяется ООС по постоянному току,
охватывающая сразу несколько каскадов.
Пример. Рассчитаем схему усилителя с эмиттерной стабилизацией.
Как указывалось ранее, стабильность рабочей точки тем выше, чем больше
падение напряжения на резисторе Rэ . Пусть Uэ = 2 В. Тогда коллекторный ток
изменится только на
dI к
dU э
2 мВ / 0 C 0,1%
/ Iк 0 / U э
0
dt 0
dt
2В
С
При выборе потенциала коллектора в отсутствие сигнала необходимо следить,
чтобы напряжение коллектор-эмиттер транзистора во время его работы не падало
до напряжения насыщения, равного 0,1- 0,3 В для маломощных транзисторов. В
противном случае появятся значительные нелинейные искажения.
С другой стороны, потенциал коллектора при отсутствии сигнала необходимо
выбирать не очень большим, так как иначе падение напряжения на Rк и
коэффициент усиления по напряжению будут малы.
Предположим, что максимальное значение сигнала на выходе Uвых макс = 2
В, относительно напряжения Uок в статическом режиме. Тогда
13
Uок Uэ + Uкэ мин + |Uк макс| = 2 + 1 + 2 = 5 В
Рассчитаем для этого случая резисторы Rк и Rэ. Пусть Iк = 1 мА. Тогда Rэ = 2В/
1мА = 2кОм. Rк= (E – Uок )/1мА = (15 – 5)/1 = 10 кОм
При этом дрейф потенциала коллектора при отсутствии сигнала равен
dU к
мВ Rк
мВ
2 0
10 0 .
dt
С Rэ
С
Если температурный диапазон составит, например 40С, то рабочая точка на
линии нагрузки сместится на 400 мВ.
Рассчитаем теперь резисторы R1 и R2 в базовой цепи. Потенциал базы
относительно общей шины при отсутствии входного сигнала равен
Uб = Uэб + Uэ = 0,6 В + 2 В = 2,6 В.
Базовый ток транзистора
Iб = Iк/ = 1Ма/50 = 20мкА.
Чтобы исключить влияние базового тока на потенциал базы выберем ток,
протекающий через резисторы R1 и R2 на порядок больше базового тока Iдел = 10Iб
= 0,2 мА.
Тогда R2 = 2,6В/0,2 мА = 13 кОм. R1 = (15-2,6 В)/0,2 мА = 61 кОм.
Аналогично проводится расчет по постоянному току для схемы с общим
коллекторам и общей базой.
1.2.2. Усилители с емкостной связью на транзисторах. Схема с общим
эмиттером в области средних частот
В усилительных каскадах в качестве нагрузки довольно часто используют
резисторы, а для связи
между усилителями применяют разделительные
конденсаторы. Такие усилители называются усилителями с RC связью иди
усилителями RC-типа.
В усилителях RC-типа транзисторы могут быть включены по схеме ОЭ, ОБ,
0К. На рис. 2.12 приведена схема усилителя RC типа с ОЭ. В этой схеме
резисторы R1, R2 и Rэ задают необходимое смещение на переходе база-эмиттер и
обеспечивают необходимую стабилизацию рабочей точки. Резистор Rэ вносит
OOС по постоянному току.
E
Rбк
Rб1
C2
Uгвх
C1
Rбн
Rб2
Rбэ
Сэ
Рис. 2.12. Усилитель RC–типа по схеме ОЭ
Для стабилизации потенциала базы относительно общей шины ток через
резисторы R1 и R2 выбирают в несколько раз большим тока базы. В этом случае
ток коллектора с изменением температуры будет изменяться очень мало, так как
увеличение тока эмиттера (при увеличении температуры) вызывает уменьшение
14
разности потенциалов база-эмиттер, что препятствует увеличению тока
коллектора.
Конденсаторы С1, С2 — разделительные конденсаторы. Они разделяют
постоянные и переменные составляющие входной и выходной цепи Сэ —
блокировочный конденсатор. Он устраняет ООС по переменному току. При его
отсутствии коэффициент усиления по переменному напряжению будет очень мал
и приблизительно равен отношению коллекторного и эмиттерного резисторов.
При проектировании усилительных устройств требуется определять
постоянные и переменные составляющие токов и напряжений. Постоянные
составляющие характеризуют режим работы транзистора, а переменные
составляющие - величины усиливаемых сигналов. Постоянные составляющие
токов и напряжений сравнительно просто и достаточно точно можно определить
графически по соответствующим ВАХ характеристикам транзистора. Однако
следует отметить, что графический метод оказывается не совсем удобным для
учета влияния разброса параметров транзисторов и их температурной
зависимости. Значительно праще эта задача решается при использования
эквивалентных схем, которые позволяют аналитически определять постоянные
составляющие токов и напряжений. При определении же переменных
составляющих токов и напряжений почти всегда отдается предпочтение
аналитическим методам расчета с использованием эквивалентных схем.
Анализ работы транзисторных усилителей обычно проводят для областей
средних, низких и высоких частот. В области средних частот коэффициент
усиления усилителя постоянен и линейных искажений не наблюдается. Так как
линейные искажения обусловлены имеющимися в усилителе реактивными
элементами, то очевидно, что в области средних частот разделительные и
блокировочные конденсаторы
не влияют на работу усилителя и их можно
считать короткозамкнутыми. По переменному току источник питания также
считается короткозамкнутым. Паразитные емкости транзистора, емкость монтажа
и нагрузки при этом считаются разомкнутыми. Учитывая вышесказанное,
рассматриваемый усилительный каскад (рис. 2.12) можно представить в виде
эквивалентной схемы рис. 2.13. Здесь транзистор представлен в виде упрощенной
эквивалентной схемы, а делитель из резисторов R1 и R2 заменен одним резистором
R = R1||R2.
Iбб
Iкб
Iкг
Rбг
Iк
Rб
Uгг
R
rб
Uгвх
rК
rэ
R1 R2
R1 R2
RН
Rн
RН RК
RН RК
Рис. 2.13. Эквивалентная схема усилителя RC–типа по схеме ОЭ
Из приведенной эквивалентной схемы прежде всего видно, что сопротивление
для постоянной и переменной составляющих коллекторного тока различно.
15
Преобразовав входную цепь и заменив генератор тока в выходной цепи
генератором напряжения, можно упростить данную эквивалентную схему.
Проделав указанные преобразования, получим эквивалентную схему,
приведенную на рис. 2.14. В этой схеме
Rг
R Rг
;
R Rг
Uг
R U Г
;
R Rг
r
rк* = 1 К .
Здесь rк* — дифференциальное сопротивление коллекторного перехода
транзистора, включенного по схеме с 0Э. Для схемы рис. 2.14 справедлива
система уравнений
Uвх = Iб(rб + rэ) + Iкrэ,
0 = Iб rэ–Iб rк* + Iк(rэ + rк* + R н)
Iкб
rб
RГ
Iкк
Iкэ
RН
rэ
UГ
I б rк*
rк*
Uвых
Uгвх
Рис. 2.14. Преобразованная эквивалентная схема усилителя RC - типа
Входное сопротивление транзистора
U вх I б rб rэ I к rэ
rк* rэ rэ
Iк
rб rэ rэ rб rэ
rвх э =
Iб
Iб
Iб
rэ rк* Rн
rвх э
(rб rЭ )(rЭ rк* Rн ) (rК rЭ ) rЭ
rЭ rК R н
Если rк*» R н, то
rвх э = rб + rэ( 1 + ).
Входное сопротивление усилительного каскада с учетом резисторов R1 и R2
будет меньше:
Rвх = rвх э || (R1 || R2).
Коэффициент усиления по току транзистора:
rк* rЭ
Iк
rк*
_
КI = I =
= R r* .
б
rЭ rк* R н
н
к
’
Видно, что коэффициент усиления по току транзистора КI′ возрастает с
уменьшением R н и стремится к значению . Коэффициент усиления по току
усилительного каскада КI = IRн / Iг можно найти, определив ток, потребляемый от
источника сигнала Iг и ток, протекающий по сопротивлению нагрузки для чего
воспользуемся эквивалентной схемой для входной цепи транзистора в области
средних частот представленной на рис. 2.15.
16
Iкб
Iкг
I
Rбг
Rб
Uгг
r вхэ
Рис. 2.15. Эквивалентная схема входной цепи усилителя с ОЭ на средних
частотах
Запишем выражение для тока Iг
R rвх э
.
I Г I б I I б
R
Очевидно, что выходную цель усилителя также можно представить в виде рис.
2.15, только вместо тока Iг в этой схеме будет ток коллектора Iк , и вместо
резисторов R и rвх э — соответственно резисторы Rк и Rн. Тогда по аналогии можно
записать
R Rн
I к I н к
,
Rк
откуда определяется ток
R
I н I к к .
Rк Rн
Rк
R
K I K I'
Rк Rн R rвх э .
Rк
R
В этом выражении коэффициенты R R и R r представляют собой
вх
к
н
коэффициенты токораспределения в выходной и во входной цепи усилителя.
Из приведенных выше выражений можно также найти коэффициент усиления
по напряжению КU’=Uвых/Uвх:
KU'
rк* rэ RН
I K RН
I rк* rэ RН
б
I Б rвх э I Б rвх э rэ rк* RН rэ rк* RН rвх э
Если rк*» R н, то:
R
K U' н .
rвх э
Относительно источника
UГ
rвх э
Rн
К U K U'
rвх э R Г
Rг rвх э
(см. рис. 2.14)
.
Относительно источника U Г (см. рис. 2.13, 2.15)
rвх э || R1 || R2
Rвх
R
'
Н
К U КU
RГ rвх э || R1 || R2
rвх э Rг Rвх
Для определения выходного сопротивления рассмотрим вновь эквивалентную
схему, приведенную на рис. 2.14.
Так как rэ«rrк*, то rэ без большой погрешности можно считать по переменному
току короткозамкнутым. Тогда выходное сопротивление усилителя rвых=rк*|| Rк.
При низкоомной нагрузке, когда Rк«rrк*, выходное сопротивление усилителя будет
17
определяться величиной сопротивления резистора, включенного в коллекторную
цепь транзистора Rк.
1.2.3. Усилитель с ОЭ в области низких частот
В области низких частот необходимо учитывать влияние на АЧХ
разделительных и блокировочных конденсаторов. Рассмотрим вначале влияние
разделительного конденсатора С1, для чего воспользуемся эквивалентной схемой
входной цепи транзистора, представленной на рис. 2.16. При этом будем считать,
конденсаторы С2 и Сэ выбраны достаточно большой емкости и не влияют на АЧХ
усилителя.
Iквх
C1
Iкб
Rбг
r вх
Rб
Uгг
Рис. 2.16. Эквивалентная схема входной цепи усилителя ОЭ в области низких
частот
Входной ток усилителя при синусоидальном входном сигнале, как это следует
из эквивалентной схемы для входной цепи рис. 2.16,
1
I вх U г
.
Rг Rвх 1 / jC1
Здесь Rвх=R||rвх; R =R1||R2.
При уменьшении частоты входного синусоидального сигнала увеличивается
реактивное сопротивление конденсатора С1 и уменьшается входной ток, а вместе
с ним уменьшается и базовый ток, так как
R
I б I вх
R rвх
.
В результате уменьшается усиление усилителя.
Оценим теперь искажения в области нижних частот количественно. Пусть
Uг(t)=Um sin t.
Тогда
1
I вх I m
,
1 1 / jC1 ( Rг Rвх )
где
Im
Um
.
Rг Rвх
Таким образом, на низких частотах усиление напряжения и тока уменьшается
пропорционально величине
h j
I вх
Im 1
1
1
.
jC1 ( Rг Rвх )
Относительное уменьшение усиления по току или напряжению можно
определить, исследуя функцию h(j). Модуль и аргумент h(j) определяются
следующими выражениями
18
h j
1
1 (1 / н1 )
2
1
,
C1 aхrctg
н1
,
где н1=С1(Rг + Rвх) — постоянная времени цепи заряда и разряда входного
конденсатора С1.
Заметим, что
K K макс
1
1 (1 / н1 ) 2
,
Здесь Кмакс — коэффициент усиления на средних частотах.
На рис. 2.17 показана зависимость |K| от частоты в области низких частот. При
нулевой частоте входной сигнал не проходит через разделительный конденсатор,
поэтому выходное напряжение транзистора, а следовательно и его |K |=0.
Поэтому АЧХ начинается с начала координат. По мере роста частоты входного
сигнала реактивное сопротивление конденсатора С1 уменьшается, что приводит к
возрастанию его коэффициента усиления.
К
Кмакс
Мн
К макс
Н
Рис. 2.17. Влияние разделительного конденсатора на АЧХ усилителя
Обычно в области низких частот выделяют граничную частоту н на которой
коэффициент усиления уменьшается в некоторое число раз.
Выражение
К макс
.
К
2
1
M н
1
Н 1
представляет собой коэффициент частотных искажений.
При заданном значении Мн определим величину емкости разделительного
конденсатора, если известна нижняя граничная частота н
1
С1
.
Н ( Rг Rвх ) М Н2 1
Следует отметить, что влияние конденсатора С2 аналогично влиянию входного
конденсатора С1 с той лишь разницей, что оно приводит к непосредственному
уменьшению тока нагрузки, а следовательно, и выходного напряжения.
Действительно, представив выходную цепь в виде источника напряжения с
внутренним сопротивлением Rвых=rК*||Rк можно определить влияние конденсатора
С2 при помощи эквивалентной схемы рис. 2.18. Из приведенного рисунка видно,
что все предыдущие выводы распространяются и на данный случай. Разница
состоит в том, что искажения на низких частотах вызваны емкостью конденсатора
С2, постоянная времени цепи заряда и разряда которого
н2 = С2(Rвых + Rн).
Используя 2 последних выражения можно рассчитать емкость конденсатора
С2.
19
С2
Iб
rК
Rбк
Rбн
Рис. 2.18. Эквивалентная схема выходной цепи усилителя ОЭ В области низких
частот
Рассмотрим теперь влияние блокировочного конденсатора Cэ. При этом будем
считать, что конденсаторы C1 и C2 не оказывают влияние на АЧХ.
В области средних частот, когда Сэ по переменному току можно считать
короткозамкнутым, ток базы транзистора будет максимальным
Iбm=Uб/Rвх
где Uб — изменение потенциала базы относительно нулевой шины. С
уменьшением частоты входного сигнала
U Uэ
Iб б
Rвх
Здесь Uэ — падение напряжения на Rэ и Cэ. В области низких частот
увеличивается реактивное сопротивление конденсатора Сэ и, следовательно,
увеличивается падение напряжения на нем. При этом ток базы уменьшается
пропорционально величине
hСэ
Iб
U
1 э .
I бm
Uб
С уменьшением Iб уменьшается ток и напряжение в нагрузке, т.е. уменьшается
усиление каскада. В пределе, когда ток через конденсатор Сэ будет равен нулю,
сопротивление в эмиттерной цепи будет равно Rэ+rэ вместо значения rэ на
средних частотах. Очевидно, что ток базы и выходное напряжение значительно
уменьшатся с уменьшением частоты входного сигнала, но их конечные значения
все же будут отличны от нуля. В этом заключается принципиальная особенность
влияния конденсатора Сэ на АЧХ усилителя в области низких частот по
сравнению с влиянием разделительных С1 и С2. Постоянную времени переходного
процесса можно определить как произведение Сэ на суммарное шунтирующее
сопротивление, представляющее собой параллельное соединение резистора Rэ и
внутреннего выходного сопротивления усилительного каскада со стороны
эмиттера.
Определим постоянную времени э, для чего рассмотрим выражение для
коэффициента усиления по напряжению в области средних частот:
K
'
макс
U
Rн
вых
,
Uг
Rг rвх э
где rвх э=rб+rэ(1+), Rн =Rн||Rк
Выражение для коэффициента усиления в области низких частот можно легко
найти, воспользовавшись вышеприведенным выражением, если вместо rэ
подставить rэ+Z, где
1
Rэ
Z Rэ ||
jCЭ 1 jC э Rэ
20
После подстановки получим
1
(1 ) Rэ
.
1
( Rг rвх э )(1 jC э Rэ )
.
КU К макс
Введем обозначение
R/
Rг rвх э
1
.
Тогда
1 jCэ Rэ
.
1 jC э Rэ Rэ / R /
.
КU К макс
Умножим числитель и знаменатель поученного выражения на
После несложных преобразований получаем
.
К u К макс
R / /( Rэ R / ) .
R / /( Rэ R / ) j э
,
1 j э
где э = Сэ(Rэ || R / ).
Модуль этого выражения
2
R/
( э ) 2
/
.
R
R
э
2
1 ( э )
KU K макс
Зависимость |KU| от частоты показана на рис. 2.19
уменьшении частоты входного сигнала до нуля
KU K макс
сплошной линией 1. При
R/
R
к
/
Rэ R
Rэ
не спадает до нуля. (При этом считается, что конденсаторы С1 и С2 в схеме
усилителя отсутствуют). В этом принципиальное отличие влияния конденсатора
Сэ на АЧХ по сравнению с конденсаторами С1 и С2.
Заметим, что рабочая область частот лежит обычно правее частоты Э 1 / Э ,
т.е. 1 / Э , или
Э 1
Если это неравенство выполняется, то
Э
R/
Rэ R /
.
Так как правая часть этого неравенства всегда меньше единицы, то выражение
для коэффициента усиления существенно упрощается и имеет вид:
K K макс
1
1 (1 / Э ) 2
,
На рис. 2.19 пунктирная линия соответствует этому выражению. Из рис. 2.19
видно, что кривые 1 и 2 расходятся вблизи начала координат, а в области частот
правее Н они очень близки и можно пользоваться приближением (2.9).
21
.
К
Кмакс
Мн
К макс
Н
Рис. 2.19. Влияние конденсатора Сэ на АЧХ усилителя (пунктирная кривая
соответствует приближенной формуле)
Рассмотрим постоянную времени
R / Rэ
э С э
.
Rэ R /
Если
R/
Rэ R /
«r1, то
R/
«rRэ
Тогда э Сэ R / и в таком приближении не зависит от сопротивления
резистора Rэ. Таким образом
R r
R r
э Сэ г вх э Сэ rэ г б .
1
1
При небольших значениях Rг выполняется неравенство
rэ
Rг rб
1
и тогда э=Cэrэ.
В рабочем диапазоне частот можно также считать, что
φССэ=aхrctg(1/э).
Отмеченные выше приближения позволяют произвести расчет конденсатора в
цепи эмиттера транзистора в рабочем диапазоне частот с использованием
простого выражения.
1.2.4. Эквивалентная схема транзистора на высоких частотах
В области высоких частот в эквивалентной схеме транзистора необходимо
учитывать реактивные элементы. Наиболее полно отражает свойства транзистора
на высоких частотах гибридная П-образная эквивалентная схема замещения
транзистора, приведенная на рис. 2.20.
В этой схеме: rб — объемное сопротивление области базы, т.е. сопротивление
полупроводникового материала между выводом базы и ее активной областью,
примыкающей к той части базы, через которую проходит диффузия неосновных
носителей. Величина этого сопротивления в значительной степени зависит от
типа транзистора и положения рабочей точки и может изменяться от нескольких
единиц до 100 Ом. Влияние сопротивления rб проявляется на высоких частотах,
так как через него проходит ток двух внутренних емкостей Сбэ и Скб
22
Б
Скб
Б/
rб
К
SUгэб
Сбэ
rэ'
Э
Рис. 2.20. Гибридная П–образная схема замещения транзистора
Скб — емкость обратно смещенного коллекторного перехода,
Сбэ — некоторая эквивалентная емкость, включенная параллельно входному
сопротивлению транзистора rэ’.
Одна составляющая этой емкости обусловлена емкостью эмиттерного
перехода, другая, большая часть емкости связана с накоплением неосновных
носителей заряда в области базы и емкости, обусловленной пространственным
зарядом эмиттерного перехода.
Параметры эквивалентной схемы рис. 2.20 при заданном постоянном
коллекторном токе можно получить, воспользовавшись паспортными данными
транзистора
I
S к ;
T
0 = h21э;
Скб;
rэ’ = 0/S.
Для определения емкости Сбэ рассмотрим усилитель с ОЭ в режиме короткого
замыкания выходкой цепи, на входе которого включен малосигнальный источник
тока (см. рис. 2.21). Такой режим не встречается на практике, однако он
характеризует влияние емкостей Сбэ и Скб на частотную характеристику
транзистора.
rб
Скб
Iк2
Сбэ
rэ'
КЗ
SUгэб
Iк1
Э
Рис. 2.21. Эквивалентная схема транзистора в режиме короткого замыкания
выходной цепи
Из рис. 2.21 видно, что при коротком замыкании на выходе усилителя емкости
Сбэ и Скб оказывается включенными параллельно. Тогда
'
.
1
rэ'
U бэ I1 rэ ||
I1
.
j Cкб Сэб
1 jrвхэ (Скб Сэб )
.
.
Другим результатом короткого замыкания на выходе является то, что весь ток
генератора SUэб проходит на выход; следовательно, через конденсатор Скб ток не
течет. Поэтому можно записать передаточную функцию для (j) в следующем
виде:
23
.
j
I2
.
.
I1
,
S U эб
0
'
1 j rэ (Скб Сбэ )
.
I1
Передаточная функция (j) имеет единственный
соответствующая этому полюсу, обозначается , т.е.
полюс.
Частота,
1
.
r (Сэб Скб )
'
э
Для частот, превышающих , коэффициент усиления тока короткого
замыкания падает на 6 дб на октаву.
Зависимость величины от частоты представлена на рис. 2.22 в
логарифмическом масштабе. Пунктиром обозначены асимптоты, а зависимость
коэффициента усиления при коротком замыкании выходной цепи показана
сплошной кривой. Точка пересечения асимптот соответствует частоте . На
высоких частотах асимптота кривой коэффициента усиления тока имеет наклон
(тангенс угла наклона), равный –1.
( j)
0,01 0,1
1
100
Т
Рис. 2.22. Зависимость коэффициента по току транзистора от частоты
Частота, соответствующая точке пересечения высокочастотной асимптоты и
прямой, определяемой выражением (j)=1, обозначена T. Этой круговой
частоте соответствует частота fT=T/2,
которая является параметром,
приводимом в паспортных данных транзистора. В пределах высокочастотной
асимптоты | | и связаны соотношением:
0 .
/
Из этого следует, что поскольку | |=1 для =T, то
T=0
или
1/ = 0/T = 0/(2fT).
Так как
1
,
r (С эб С Кб )
'
э
то получаем
rэ’(Сбэ+Скб)=0/2fT.
Отсюда находим значение емкости
Cбэ
0
Скб .
2f T rэ'
24
Из выражения для T видно, что fT есть произведение 0 и f, поэтому, fT часто
называет произведением усиления на полосу частот для данного транзистора. В
справочнике на некоторые транзисторы вместо fT приводят значение || на
частоте, заведомо лежащей в диапазоне, соответствующем высокочастотной
асимптоте.
Например, транзистор, имеющий значение ||=5 на частоте 100 МГц будет
иметь fT=1005=500 МГц.
Наиболее трудно определить параметр транзистора rб. Этот параметр, к
счастью, наименее важен в общих расчетах. Если значение rб не приведено в
справочнике то его можно взять равным 50–100 Ом.
В области высоких частот rэ’ можно рассматривать как разрыв цепи по
сравнению с сопротивлениями конденсаторов Сбэ и Сбк. Следовательно, его можно
считать резистивным компонентом входной цепи. Входная проводимость схемы
ОЭ при коротком замыкании на выходе на высоких частотах имеет вид
.
j (Сбэ Скб )
Y
1 j rб (Сбэ Скб )
Этот высокочастотный параметр имеет единственный полюс на частоте
1
,
rб (Сбэ Скб )
который лежит далеко за пределами рабочего частотного диапазона схемы 0Э.
По этой причине влиянием rб без большой погрешности во многих случаях можно
пренебречь.
1.2.5. Усилитель с 0Э в области высоких частот
В области высоких частот коэффициент усиления усилителя определяется
значением (j) и шунтирующим влиянием внутренних емкостей транзистора и
емкостей монтажа.
Как известно,
0
j
1 j / .
где — граничная частота усиления транзистора по току в схеме ОЭ, на
которой || уменьшается в 2 раэа. Найдем
0
1 ( / ) 2
.
Тогда очевидно
K U
0 Rн
rвхэ 1 ( / )
2
К макс
1 ( / ) 2
.
.
Отношение Кмакс/| К U | определяет коэффициент частотных искажений
M в 1 ( / ) 2 1 ( ) 2
.
По заданным значениям Мв и верхней граничной частоте можно найти
и выбрать тип транзистора.
Рассмотрим теперь влияние паразитных емкостей на АЧХ усилителя,
В каждой схеме есть ряд емкостей, которые с резисторами образуют фильтры
нижних частот. Они изображены на рис. 2.23. Основными паразитными
емкостями являются: С1 — емкость монтажа, особенно емкость входных цепей;
1 /
25
С2 — емкость эмиттер-база; С3 — емкость коллектор-база; С4 — емкость
коллектор–эмиттер.
В схеме имеются два фильтра низких частот. Конденсаторы С3 и С4 с
параллельно включенным резистором Rк образуют фильтр низких частот на
выходе транзистора. Он уменьшает динамическое коллекторное сопротивление на
высоких частотах и тем самым снижает коэффициент усиления по напряжению.
На входе транзистора фильтр низких частот образуют конденсаторы С1, С2, С3 и
резистор RГ (на схеме не показан).
Действующая входная емкость схемы равна
.
Свх=С1+С2+| К U | С3
-E
Rк
R1
С3
Ссв2
Cсв1
Uвх
С4
R2
С1
С2
Rэ
Сэ
Rн
Рис. 2.23. Усилитель по схеме ОЭ на высоких частотах
Кроме сужения полосы пропускания усилителя, обратная связь через емкость
С3 значительно уменьшает входной импеданс усилителя. Уменьшение полосы
пропускания усилителя и увеличение его входной проводимости при увеличении
коэффициента усиления в результате действия емкостной обратной связи
называется эффектом Миллера.
Если K 1 , то C K С . Модуль коэффициента усиления для схема 0Э
можно определить из выражения
U
вх
U
кб
U
К макс
K U вых
,
Uг
1 ( в ) 2
где
в = [rrэ’||(Rг + rб)][rC2 + C3(1 + К)].
Коэффициент частотных искажений
M в 1 ( в ) 2
В реальной схеме усилителя спад АЧХ в области высоких частот обусловлен
влиянием, как инерционностью транзистора, так и шунтирующим влиянием
паразитных емкостей, которые определяют верхнюю граничную частоту
усилителя.
1.2.6. Усилитель по схеме ОБ
Схема усилительного каскада с ОБ приведена на рис. 2.24. В этой схеме
потенциал базы по переменной составляющей равен нулю. Входной сигнал
подается в цепь эмиттера, а нагрузка подключена в коллекторную цепь.
26
-E
R1
Rk
C2
C1
Uгвх
Rбэ
R2
Сб
Rбн
Рис. 2.24. Схема усилителя RC–типа по схеме ОБ
Резисторы R1 и R2, а также резистор RЭ, как и в схеме ОЭ, обеспечивают не
только положение рабочей точки на линии нагрузки, но и выполняют роль
температурной стабилизации.
Рассмотрим работу усилительного каскада с ОБ в области средних частот и
определим основные параметры усилителя.
Эквивалентная схема усилителя приведена на рис. 2.25. Запишем систему
уравнений, из которой определим основные усилительные параметры для схемы
ОБ.
Uвх = Iэ(rэ+rб)–Iкrб=Iэrэ+(Iэ–Iк)rб,
0 = Iэ(rб–rк)+Iк(rк+ Rн –rб)
Iэ(rк – rб)= Iк(rк + Rн – rб)
Найдем коэффициент усиления по току транзистора в схеме рис. 2.24
I
rб rк .
К /I к
Iэ
rб rк Rн
Так как rк » rб » , rк » Rн , то К I / ≈ .
Коэффициент усиления по току усилительного каскада:
КI
Iн
R
R
/
К I э к .
Iг
Rэ RГ Rк Rн
Это выражение свидетельствует о том, что коэффициент усиления по току в
схеме ОБ меньше единицы и зависит от коэффициентов разветвления токов во
входной и выходной цепи.
Входное сопротивление усилителя можно найти, пересчитав резистор r б во
входную цепь (см. рис. 2.25).
rвх б rэ + rб(1 – )
Входное сопротивление усилительного каскада будет меньше
Rвх б = rвх б || Rэ.
Коэффициент усиления по напряжению транзистора
U
I R
I R
Rн
/
КU вых к н Э Н
U вх
I э rвх б
I Э rвх б
rвх б
Полученное выражение
усилителя при Rг = 0.
.
позволяет
определить
27
коэффициент
усиления
Iкэ
rК
rэ
Rг
Uгвхб
Iэrк
UГ
U Г RЭ
RГ RЭ
Iкк
Iкб
rб
Uг
Rн
R R
RГ Г Э
RГ RЭ
RН
RН RК
RК RН
Рис. 2.25. Эквивалентная схема усилителя RC–типа с ОБ
При Rг 0 входной ток будет создавать на нем падение напряжения» что
приведет к уменьшению напряжения Uвх (см. рис. 2.25).
Напряжение
U вх U г
rвхб
Rэ
Rг rвхб
1
U г
R
R .
Rэ
1 г г
Rэ rвхб
Тогда:
U
1
KU вых К / U
R
R
UГ
1 г г .
Rэ rвх б
Полученное выражение свидетельствует о значительном влиянии внутреннего
сопротивления источника сигнала на коэффициент усиления усилителя,
включенного по схеме ОБ.
Выходное сопротивление схемы ОБ определяется величиной сопротивления
резистора, включенного в коллекторную цепь транзистора. Действительно» из
рис. 2.25 видно, что Rвых б =rк||Rк=Rк, так как rк » Rк.
1.2.7. Особенности усилителя ОБ в области высоких частот
В области высоких частот в схеме ОБ необходимо учитывать, как и в схеме ОЭ
частотную зависимость параметров транзистора и влияние паразитных емкостей
транзистора и монтажа.
Коэффициент усиления по току в схеме ОБ
0
j
,
1 j /
где — граничная частота усиления по току в схеме ОБ, на которой 0
уменьшается в 2 раза; 0 — коэффициент усиления по току в области низких и
средних частот.
Найдем
0
1 ( ) 2
.
Тогда
/
КU
Rн
К макс
.
rвхб
1 ( ) 2
Здесь Кмакс — коэффициент усиления в области средних частот,
1 /
Рассмотрим теперь влияние паразитных емкостей в рассматриваемой схеме
усилителя. Входная емкость для схемы рис. 2.24
Свх ≈ С1 + С2 – КС3
28
где С1 — монтажная емкость на входе усилителя; С2 — емкость перехода базаэмиттер, С3 — емкость перехода коллектор-база. Из этого выражения видно, что
последнее слагаемое приводит к некоторому уменьшению входной емкости.
Поэтому в схеме 0Б можно считать, что основное влияние в области высоких
частот оказывает емкость Скб и емкость монтажа, которые включены параллельно
сопротивлению коллекторного перехода.
Постоянная времени для выходной цепи
1
к Ск
Ск Rк || Rн .
1 / Rк 1 / rк 1 / Rн
Тогда в области высоких частот
K U
К макс
1 ( к ) 2
1.2.8. Эмиттерный повторитель
На рис. 2.26 приведена схема с общим коллектором (ОК). Она называется
также эмиттерным повторителем, так как напряжение на выходе, снимаемое с
эмиттера, повторяет фазу входного сигнала и имеет коэффициент передачи
близкий к единице.
Коллектор транзистора по переменной составляющей тока заземлен, и вся
нагрузка включается в эмиттерную цепь. Из рис. 2.26 видно, что
Uэб = Uвх – Uвых
Так как напряжение Uэб мало и мало меняется при изменении входного
сигнала, то Uвх≈Uвых. Эмиттерные повторители допускают работу с большими
входными сигналами по сравнению с усилительными каскадами других типов.
E
Rб1
Uгвх
C1
Rб2
С2
Rбн
Rбэ
Рис. 2.26. Усилитель RC–типа по схеме ОК
Определим основные параметры эмиттерного повторителя в области средних
частот, воспользовавшись эквивалентной схемой, приведенной на рис. 2.27.
Найдем
U
rвх к rвх к вх rб ( 1) rк* || rэ RЭ || RН .
Iб
Если пренебречь влиянием rэ, то выражение для rвх к можно упростить и
представить в виде
rвх к rб 1 rк* || Rн
где Rн = Rн || Rэ.
В этом выражении первое слагаемое пренебрежимо мало по сравнению со
вторым. Кроме того, в большинстве случаев Rн «r rк* и последнее можно не
учитывать. Однако rк ограничивает максимально возможное значение величины
Rвх схемы ОК. Действительно, если предположить, что Rн » rк* , то максимальная
29
величина Rвх к ≈rк. В режиме короткого замыкания на выходе, когда Rн стремится
к нулю, входное сопротивление схемы с ОК равно входному сопротивлению
схемы ОЭ. Следовательно, схема ОК имеет самое высокое входное сопротивление
из всех схем включения биполярных транзисторов. Для практических расчетов
можно считать, что rвх к ≈ ( + 1) Rн
Практически при холостом ходе (когда Rн достаточно велико) можно получить
входное сопротивление до 100–200 кОм и более при включении в эмиттерную
цепь транзистора сопротивления порядка 10 кОм. При наличии нагрузки входное
сопротивление эмиттерного повторителя обычно определяется величиной
сопротивления нагрузки, которая в случае повторителя напряжения не бывает
большой (иначе не имеет смысла использовать эмиттерный повторитель). При
этом если нагрузка не остается постоянной, меняется и входное сопротивление.
Величина входного сопротивления в схеме ОК в значительной степени
ограничивается делителем в цепи базы
Rвх к=rвх к||R,
где R = R1 || R2.
Высокое значение входного сопротивления можно получить лишь при условии
R»rвх к. Поэтому в ряде случаев приходится используют либо непосредственную
связь с источником сигнала без делителя напряжения, либо искусственно
повышать сопротивление цепи смещения с помощью обратной связи. Если
большое входное сопротивление является первоочередным требованием, то
применяют схемы повторителей на составном транзисторе, либо повторители с
динамической нагрузкой [7].
Определим коэффициент передачи по напряжению
U
(1 )(rК || RН ) I б
KU вых
RГ rвх к I б
Uг
1
RГ rб
1
1 rк* || RН
Как видно КUок < 1, а Uвых≈Uвх. По этой причине КUок чаще называют
коэффициентом передачи. На КUок большое влияние оказывают внутреннее
сопротивление источника входного сигнала и нагрузка в эмиттерной цепи, С
увеличением внутреннего сопротивления источника сигнала КUок падает, а с
увеличением Rн , КUок возрастает. Следует заметить, что при Rг → 0 и Rн →
1
KU ок
1 rб / rК
rб
rэ
RГ RГ || R1 || R2
Rн
Iб
Rг
Uг
.
R
rК
Rэ
R
R1 R2
R1 R2
RН
RН RЭ
RН RЭ
Рис. 2.27. Эквивалентная схема усилителя RC- типа ОК
Коэффициент усиления по току находится аналогично, как и для схемы ОЭ.
Так, коэффициент усиления по току транзистора в схеме эмиттерного
повторителя равен ( + 1), а коэффициент усиления по току усилительного
каскада можно найти, определив коэффициенты распределения тока во входной и
в выходной цепи. С учетом этих коэффициентов
30
K I ок (1 )
rК ||Rэ
R
*
rк ||Rэ Rн R rвх к
.
Выходное сопротивление эмиттерного повторителя определяет его
нагрузочную способность как по постоянному, так и по переменному току. Из
эквивалентной схемы рис. 2.20 при выполнения условия
rк*
RГ rб
1
следует, что
Rвых ок rэ
RГ rб
1
.
При Rг → 0
выходное сопротивление схемы ОК равно входному
сопротивлению схемы ОБ.
Особенностью работы эмиттерного повторителя в области высоких частот
является то, что его входное сопротивление резко уменьшается с увеличением
частоты входного сигнала. Это обусловлено инерционностью процессов в базе
транзистора, а также наличием коллекторной и нагрузочной емкостей. Так при
подаче на вход схемы ОК импульсного сигнала с коротким фронтом в первый
момент входное сопротивление будет равно значению rб. По мере зарядки
емкостей и нарастания коэффициента усиления по току (t) входное
сопротивление увеличивается до своего установившегося значения.
Влияние емкости С*к сказывается в том, что начальный скачок напряжения на
выходе отсутствует и увеличивается время нарастания.
Емкость Сн оказывает приблизительно такое же влияние, что и С*к и еще
больше уменьшает крутизну начального участка фронта.
Установка рабочей точки в схеме ОК производится также, как и в схеме с ОЭ с
эмиттерной стабилизацией. Для выбора потенциала эмиттера имеется больше
возможностей, так как потенциал коллектора не зависит от управляющего
сигнала. Следовательно, напряжение Uкэ можно выбрать более высоким, чем в
схеме с ОЭ. Благодаря этому имеется возможность реализации простой
гальванической связи эмиттерного повторителя с выходом предыдущего и с
входом последующего каскада.
2.4 УСИЛИТЕЛИ НА ПОЛЕВЫХ ТРАНЗИСТОРАХ
2.4.1 Общие сведения о полевых транзисторах
Полевые транзисторы, представляют собой полупроводниковые приборы,
которые в отличие от биполярных транзисторов управляется электрическим
полем. Отличительными особенностями полевых транзисторов являются:
чрезвычайно малые токи во входной цепи, линейная зависимость крутизны от
управляющего напряжения, возможность работы в качестве сопротивления,
управляемого напряжением, наличие термостабильной точки у транзисторов с
обратносмещенным переходом затвор - исток, повышенная радиационная
стойкость, малый уровень шумов. В тоже время простота технологии, малая
площадь, занимаемая на подложке особенно важны при производстве
интегральных микросхем.
Различают две разновидности полевых транзисторов: полевые транзисторы с
управляющим р-n переходом и полевые транзисторы МДП-типа. В транзисторах с
31
управляющим p-n переходом затвор отделен от канала сток-исток обратно
смещенным р-n или n-p переходом. При правильной полярности напряжения
переход затвор-исток всегда заперт.
Принцип действия полевого транзистора с обратно смещенным управляющим
переходом затвор-исток основан на изменении площади поперечного сечения
проводящей части полупроводникового материала. С уменьшением напряжения
на затворе относительно истока уменьшается сопротивление канала и происходит
увеличение тока полевого транзистора. Следовательно, током стока можно
управлять с помощью напряжения, приложенного к затвору относительно истока,
Поскольку p-n переход полевого транзистора включен в обратном
направлении, его входное сопротивление очень велико, что является большим
достоинством этого полупроводникового прибора.
Увеличение напряжения на затворе вызывает в конечном итоге такое
расширение управляющего перехода, при котором токопроводящий канал
окажется перекрытым. Это напряжение называется напряжением отсечки.
Следует заметить, что к p-n переходу оказывается приложенным не только
напряжение на затворе Uз, но и напряжение, выделяющееся на распределенном
сопротивлении канала, создаваемое током, протекающим от истока к стоку.
Поэтому толщина p-n перехода у стока оказывается большей, чем у истока.
В полевых транзисторах МДП-типа затвор отделен от канала сток-исток
тонким слоем окисла SiО2.
На рис. 2.28 показано семейство статических стоковых характеристик полевого
транзистора с управляющим p-n переходом: Iс = f(Uс) при Uз = const.
Рис. 2.28. Выходные сток-затворные характеристики полевого транзистора с
управляющим p-n переходом
Рассмотрим выходную характеристику, соответствующую напряжению Uз = 0.
При малых значениях Uс ток стока увеличивается почти пропорционально
изменению данного напряжения (участок ОА, рис. 2.28). Этот крутой участок
выходной характеристики соответствует полностью открытому каналу. Малый
ток стока создает малое падение напряжения на открытом канале, что вызывает
лишь незначительное сужение самого канала возле стока.
При большом значении тока стока из-за падения напряжения на канале его
сечение возле стока значительно уменьшается, что вызывает существенное
замедление роста тока стока при дальнейшем повышении напряжения Uс (участок
АБ). В конечном итоге канал сужается настолько, что дальнейшее существенное
увеличение тока стока оказывается невозможным (участок БВ). Следует заметить,
что расширяющийся p-n переход не может в данном случае полностью перекрыть
32
канал (запереть ток стока). Поэтому наступает не перекрытие, а только
насыщение тока стока.
Если между затвором и истоком приложить некоторое напряжение, то сечение
канала в исходном состоянии уменьшится, а его сопротивление увеличится.
Поэтому угол наклона крутого участка выходной характеристики будет меньше.
Кроме того, переход к режиму насыщения произойдет при меньших значениях
напряжения и тока стока.
Подавая между затвором и истоком последовательно ряд напряжений, получим
все семейство статических стоковых характеристик. Область насыщения (область
II), являющаяся рабочей областью транзистора, на этом семействе расположена
справа от штриховой линии.
В транзисторах с изолированным затвором управление проводимостью канала
осуществляется с помощью металлического электрода, отделенного от канала
тонким слоем диэлектрика, благодаря чему входное сопротивление транзистора
оказывается достаточно большим.
Существует две разновидности полевых транзисторов с изолированным
затвором. В одних полевых транзисторах с изолированным затвором отсутствует
управляемая проводимость между областями стока и истока при разности
потенциалов между затвором и истоком, равной нулю. Такие приборы
называются транзисторами с индуцированным каналом. У полевых транзисторах
с индуцированным каналом канал проводимости возникает лишь при
определенном пороговом напряжении на затворе Uпор. В этом случае полевой
транзистор работает в режиме обогащения канала носителями заряда, т.е. при
увеличении входного напряжения ток стока увеличивается.
В других транзисторах между стоком и истоком имеется слабо легированный
канал проводимости. Это так называемые приборы со встроенным каналом.
Проводимость этого канала может в зависимости от полярности управляющего
напряжения как возрастать, так и уменьшаться, т.е. транзистор может работать
как в режиме обогащения, так и в режиме обеднения канала носителями заряда.
Ток стока полевого транзистора с управляющим p-n переходом связан с
входным напряжением UЗИ следующей зависимостью
U зи
I c I c нач 1
U отс
2
,
где Iс нач значение тока стока при Uз = 0,
Uотс — напряжение отсечки, при котором ток стока полевого транзистора
равен нулю.
Так как управление полевого транзистора осуществляется напряжением, то для
количественной оценки управляющего действия используется крутизна
S
2 I c нач
dI c
U зи
2
(1
)
dU з
U отс
U отс
U отс
I c I c нач
.
При Uз = 0
S S нач
2 I c нач
U отс
.
Таким образом
33
U
S S нач 1 зи ,
U отс
т.е. крутизна усиления полевого транзистора уменьшается при увеличении
напряжения на затворе.
Анализ выходных характеристик полевых транзисторов показывает, что
существует две четко разграниченные области работы прибора: область I, где Iс
зависит как от напряжений Uси и Uзи, и область II, где Ic зависит только от
напряжения Uзи. Для прибора, работающего в режиме обеднения, разделяющая
области линия определяется из условия появления в некоторой части канала
эффекта отсечки. Для прибора. работающего только в режиме обогащения,
разделяющая линия определяется таким значением Ucи, при котором в некоторой
точке приповерхноcных усилителей. тного слоя исчезает индуцированный канал между стоком и
истоком. Исходя из этого, должны быть два отдельных уравнения тока стока,
соответствующих двум указанным областям.
Из анализа физических процессов в МДП-транзисторе, способного работать
как в режиме обеднения, так и в режиме обогащения канала носителями,
известно, что для тока стока в первой области (см. рис. 2.28) справедливо
следующее уравнение
Ic=К[r(Uзи – Uотс)Uси – 0,5U2си]
при Uси Uзи – Uотс; Uзи – Uотс 0.
Первое неравенство обеспечивает отсутствие отсечки за счет изменения
напряжения Ucи, второе — исключает отсечку за счет напряжения Uзи.
Постоянный коэффициент К отражает свойства полупроводникового материала и
геометрии прибора и обычно определяется экспериментальным путем.
В области II ток стока остается постоянным и равным той величине, которой
соответствует начало эффекта отсечки. Положив Uси=Uзи–Uотс и, исключив Uси из
уравнения (3.1), получим
(U зи U отс ) 2
I c K U зи U отс U зи U отс
0,5 K (U зи U отс ) 2
2
при Uси Uзи – Uотс; Uзи – Uотс 0.
Таким образом, первое выражение справедливо для ВАХ области I , a второе для ВАХ области II. Штриховой линией показана граница Uси=Uзи–Uотс, которая
разделяет обе области.
Для полевого транзистора, работающего только в режиме обогащения
(индуцированный канал) можно использовать аналогичное уравнение, заменив в
них Uотс на Uпор. В области I:
U2
I c K U зи U пор U си си
2
при
Uси Uзи – Uпор; Uзи Uпор,
а в области II:
Ic = 0.5К(Uзи – Uпор)2
при Uси Uзи – Uпор, Uзи Uпор.
В приведенных выражениях Uпор — пороговое напряжение, при котором в
полевом транзисторе с индуцированным каналом возникает канал проводимости.
Основными параметрами полевого транзистора являются крутизна усиления и
дифференциальное сопротивление канала. Эти параметры могут быть определены
34
по ВАХ полевого транзистора. Крутизна усиления S = Iс/Uзи определяется по
характеристике Ic=f(Uзи).
В зависимости от типа транзистора значение крутизны может быть от единиц
до сотен и более миллиампер на вольт. Дифференциальное сопротивление канала
в области насыщении rси=Uc/Ic имеет типовое значение десятков сотен кОм.
Рис. 2.29.
Вольтамперная характеристика IC = f(UЗИ) при различных
температурах окружающей среды
Отличительной особенностью полевых транзисторов с обратно смещенным p-n
переходом является также то, что при определенном выборе режима его работы
ток стока не зависит от изменения температуры окружающей среды. (см. рис.
2.29).
Объясняется это взаимной компенсацией двух разных процессов,
протекающих одновременно при увеличении температуры: уменьшением
удельной проводимости канала (по этой причине ток стока уменьшается), и
уменьшением контактной разности потенциалов на p-n переходе затвор-канал,
вызывающим расширение проводящей части канала и, следовательно,
увеличению тока стока.
Существует еще одна причина, которая может вызвать температурный дрейф
тока стока — это нестабильность тока затвора. Его величина составляет тысячные
доли мкА, а температурный коэффициент положительный, как у биполярных
транзисторов. Если в цепь затвора включен высокоомный резистор (десятки
МОм), то ток затвора может создать на нем дополнительное смещение, которое
возрастает с увеличением температуры. В результате изменится и ток стока.
Поэтому в цепи затвора полевого транзистора не рекомендуется включать
резисторы, сопротивление которых больше нескольких МОм.
1.2.9. Схема усилителя с общим истоком
По аналогии с биполярными транзисторами в зависимости от того, какой
электрод используется в качестве общего заземленного электрода, различают три
схемы включения полевых транзисторов: общий исток (ОИ), общий сток (ОС) и
общий затвор (03).
Схема с общим истоком (рис. 2.30) имеет много общего со схемой ОЭ для
биполярного транзистора. Различие состоит в том, что управляющий переход
затвор-исток полевого транзистора имеет обратное смещение и поэтому входная
цепь полевого транзистора практически не потребляет тока от источника сигнала.
35
Е
Rс
C2
С1
Uвх
Rз
Cи
Rи
Rн
Рис. 2.30. Усилитель RC-типа с общим истоком
В схеме рис. 2.30 резистор Rи обеспечивает ООС по постоянному току. Такая
обратная связь в усилителях на полевых транзисторах является удобным
средством установки рабочей точки. Последовательно с полевым транзистором
включен резистор Rс. Изменение тока через этот резистор приводит к изменений
падения напряжения на нем, которое во много раз больше входного сигнала.
Для расчета схемы в статическом режиме необходимо задать ток стока
транзистора. По сток-затворной характеристике определяется соответствующее
этому току значение напряжения Uзи .В зависимости от выбранной величины тока
стока оно может принимать значение от 0 до Uотс. Для определения напряжения
Uзи воспользуемся приближенным выражением
U зи U отс 1 I с / I смакс .
Из этого выражения можно определить сопротивление в цепи истока
Rи
U зи U отс
1
IC
Ic
I с / I смакс
.
В качестве примера зададим следующие параметры полевого транзистора: Iс
макс=10 мА, Uотс=–3В и выберем величину Iс =+ 3 мА..
При атом Uзи=–3(1– 0,3 )=1,36В. Сопротивление резистора в цепи истока Rи
составит
1,36 В / 3 мА = 452 Ом.
Потенциал стока при отсутствии сигнала выбирается из условия
Uc |Uотс| + |Uс| макс.
При размахе выходного напряжения 2 В и допуске 2 В для потенциала стока
Uс при отсутствии сигнала выбираем значение Uс = 7 В.
Если напряжение источника питания равно 15 В, то величина сопротивления
резистора в цепи стока полевого транзистора
Rс = (15– 7) / 3 мА = 2,7 К.
Крутизна характеристики транзистора в рабочей точке определяется из
приближенной формулы:
S
2 I c max
U зи 2 I c max
Ic
20
1
3 мА / 10 мА 3,65
U отс U отс U отс
I c max 3В
мА
.
В
На рис. 2.31 приведена упрощенная малосигнальная эквивалентная схема
усилительного каскада с общим истоком в области средних и высоких частот.
36
Сзи
Rг
Сзс
rси Cси
Rз
Uг
Rн
SUзи
Рис. 2.31. Эквивалентная схема усилителя RC-типа с ОИ в области средних и
высоких частот
На этой же схеме показаны межэлектродные емкости Сзи, Сзс, Сси, учет которых
необходим при анализе усилителя в области высоких частот.
Определим коэффициент усиления по напряжению в области средних частот
U
Rз
KU ои н
S rСИ // RН ,
Uг
Rг Rз
где Uн = – S Uзи rси|| Rн ,
RН
R Rз
U г U зи г
.
Rз
=Rн || Rс,
KU ои S rСИ // RН .
При Rг «r Rз
Усилитель с ОИ из-за высокого входного сопротивления обладает наибольший
из всех транзисторов коэффициентом усиления по мощности
Pвых U 2 вых Rвх
R
KP 2
К 2U вх .
Рвх U вх Rвых
Rвых
Так при Кu = 1, Rвх = 200 мОм, Rвых = 2 кОм, Кр = 100 на один каскад.
Чтобы увеличить коэффициент усиления по напряжению в схеме ОИ нагрузка
в цепи стока по переменному току должна быть высокоомной. Поэтому в схемах
усилителей широко применяют динамическую нагрузку, т.е. вместо резистора Rс
включают генератор стабильного тока, построенный на биполярных или полевых
транзисторах.
Выходное сопротивление усилительного каскада Rвых = rси||Rc определяется
величиной Rс, если Rс «r rси.
Входное сопротивление в области низких частот определяется величиной
сопротивления резистора Rз,
выбор величины которого может быть в
значительной мере произвольным.
Максимальное значение сопротивления
резистора Rз определяется, как указывалось выше,
допустимым падением
напряжения на нем, обусловленным током утечки затвора. При этом
максимальная величина сопротивления Rз составляет несколько мегаом.
На более высоких частотах необходимо учитывать в схеме усилителя полные
сопротивления Zзс, Zзи, Zзс. Так, входная проводимость, определяемая отношением
входного тока к входному напряжению на входных зажимах
1
1 U вх U вх U вых 1 1 К
j C зи С зс 1 K
Z вх U вх Z зи
Z зс
Z зи Z зс
Здесь К — коэффициент усиления по напряжению схемы ОИ.
Таким образом, можно считать, что эквивалентная схема входной цепи
транзисторного усилителя на высоких частотах содержит резистор Rз, емкость Сзи
и емкость в (1 + К) раз большую, чем Сзс.
37
Входная емкость полевого транзистора образует с внутренним сопротивлением
источника сигнала Г- образное звено фильтра низких частот, граничная частота
которого (на уровне – 3 дб):
0
1
Rг С зс (1 К ) С зи
,
если Rз » Rг.
При активном сопротивлении нагрузки обратная связь через емкость Сзс
увеличивает эквивалентную входную емкость.
Если сопротивление нагрузки реактивное, задача усложняется, так как
коэффициент усиления становится комплексным. Можно показать, что при
индуктивной нагрузке во входную цепь через емкость Сзс вносится отрицательное
сопротивление, которое может служить причиной самовозбуждения усилителя.
1.2.10.
Особенности схем с общим стоком и общим затвором
Схема с общим стоком обладает значительно большим входным
сопротивлением, чем схема с общим истоком.
В большинстве случаев в области низких и средних частот это не имеет
особого значения, так как Rвх достаточно велико и для схем с общим истоком.
Преимуществом схемы с ОС является то, что она существенно уменьшает
входную емкость усилителя. Свх ои = Сзс + Сзи(1 – Кои) ≈ Сзс, так как коэффициент
усиления Кои близок к единице.
В отличие от эмиттерного повторителя выходное сопротивление истокового
повторителя не зависит от внутреннего сопротивления источника сигнала.
Принципиальная схема истокового повторителя приведена на рис. 2.32,
Упрощенная эквивалентная схема истокового повторителя имеет такой же вид,
как рис. 2.31 (рис. 2.32, б), если вместо Rс включить Rи.
Сзи
E
С2
С1
Rг
Uвх
Rз
Rз
Rи
Rн
Uг
Rи||rси Cси
Сзcных усилителей. Rн
SUзи
а)
б)
Рис. 2.32. Истоковый повторитель — а, и его схема замещения на средних и
высоких частотах —б
Коэффициент передачи по напряжению истокового повторителя
U
SRн
KU KUос вых
,
U вх 1 S RН
где RH rси // RН // RИ
Выходное сопротивление истокового повторителя
1
Rи
Rвых || Rи
, где RИ RИ // rси
S
1 SRи
При S RИ 1 , Rвых ос ≈ 1/S.
Меньшее значение крутизны усиления маломощных полевых транзисторов по
сравнению с крутизной усиления биполярного транзистора не позволяет получить
38
в истоковом повторителе таких низких выходных сопротивлений, как в
эмиттерном повторителе. По этой причине иногда применяют составной
транзистор на полевом и биполярном транзисторе (схема Дарлингтона). Такой
составной транзистор обеспечивает высокое входное
и низкое выходное
сопротивление.
На рис. 2.33 приведена схема истокового повторителя, позволяющая увеличить
входное сопротивление за счет напряжения ООС.
Е
С1
С2
Uвх
R1
Rз
Rн
R2
Рис. 2.33. Истоковый повторитель с высоким входным сопротивлением
Входной ток в данной схеме, протекающий через резистор Rз
R
U вх КU вх 2
U
R1 R2 .
I вх Rз
Rз
Rз
Откуда
Rвх
1 К
Rз
R2 .
R1 R2
Здесь К — коэффициент передачи истокоэого повторителя. При R1 = 0 входное
сопротивление принимает максимальное значение
Rвх макс = Rз / (1-К).
Если К = 0,9, то Rвх увеличивается на порядок..
В схеме с общим затвором (аналог включения биполярного транзистора с ОБ)
наблюдается полная параллельная внутренняя ООС по току, что дает малое
эквивалентное входное сопротивление и синтезирует выходную цепь —
генератор тока. Поэтому каскад с общим затвором повторяет в нагрузке входной
ток сигнала и усиливает напряжение на высокоомной нагрузке. Так как в этой
схеме затвор заземлен, то электрическое поле стоковой области практически не
оказывает влияния на входную цепь. В схеме с общим затвором проводимость Y12
= 0, поэтому каскад сохраняет устойчивость, даже если в цепи истока включается
резонансный контур.
Таким образом, усилительный каскад с общим затвором обеспечивает
высокочастотную развязку цепей нагрузки и генератора сигнала. На практике этот
каскад чаще всего применяется в составе сложного каскада общий исток – общий
затвор, известного под названием каскодной схемы.
В каскодной схеме каскад с общим истоком усиливает входной сигнал лишь по
току. Малое входное сопротивление схемы с общим затвором минимизирует
входную емкость и расширяет амплитудно-частотную характеристику каскодного
усилителя
39
Каскодные схемы широко применяются в резонансных усилителях, в которых
в качестве нагрузки используется колебательный контур. Малая входная емкость
каскодного усилителя повышает не только устойчивость резонансного усилителя,
но и позволяет значительно увеличить его коэффициент усиления.
1.3. МНОГОКАСКАДНЫЕ УСИЛИТЕЛИ
1.3.1. Общие вопросы проектирования многокаскадных усилителей
Одиночные усилительные каскады, выполненные на биполярных и полевых
транзисторах, имеют ограниченный коэффициент усиления, зависящий от
параметров транзистора и других компонентов схемы. Эти каскады сами по себе,
как правило, не в состоянии обеспечить требуемый коэффициент усиления.
Поэтому применяют многокаскадные усилители, представляющие собой
последовательное соединение одиночных усилительных каскадов.
Можно выделить следующие виды связи между отдельными усилительными
устройствами: гальваническую (непосредственную), емкостную (с помощью RСцепей), трансформаторную или автотрансформаторную, с помощью частотнозависимых цепей и оптронную. Для сравнительно низкочастотных усилителей
чаще всего используются два первых вида связи. Трансформаторная и
автотрансформаторная связи в низкочастотных усилителях применяется
значительно реже из-за больших габаритов трансформаторов, невозможности их
миниатюризации, высокой стоимости. Кроме того, трансформаторы в таких
усилителях являются источниками значительных нелинейных и частотных
искажений. Однако трансформаторная связь позволяет получать максимальное
усиление по мощности, что в ряде случаев бывает важно. Наиболее широко
трансформаторные и автотрансформаторные связи применяются в резонансных
избирательных усилителях, в которых в качестве нагрузки используются LC
контура.
Частотно-зависимые цепи используют при создании многокаскадных
усилителей с непосредственной связью, а также при создании избирательных
усилителей. Оптронная связь между каскадами применяется в специальных
случаях, когда при низкой рабочей частоте требуется хорошая гальваническая
развязка между каскадами.
При проектировании многокаскадных усилителей обычно необходимо знать
выходное напряжение Uвых, сопротивление нагрузки Rн и коэффициент усиления.
Необходимо также знать допустимые коэффициенты линейных и нелинейных
искажений, рабочий диапазон частот, внутреннее сопротивление источника
сигнала, динамический диапазон изменения входного сигнала.
Проектирование многокаскадного усилителя рекомендуется начинать с выбора
его структурной схемы и активных элементов, входящих в нее, исходя из
требований, предъявляемых к усилителю. В качестве отдельных каскадов
многокаскадного усилителя используют и интегральные усилители. Их также
вводят в состав структурной схемы усилителя, а специфические требования
удовлетворяют за счет применения обратной связи соответствующего вида. При
этом иногда в общую схему усилителя приходится включать дополнительно
мощный выходной каскад, а также входной каскад с высоким или очень малым
входным сопротивлением. И только в случае, если из-за требований,
40
предъявляемых к характеристикам преобразования, усилитель нельзя выполнить
из набора готовых интегральных микросхем, его проектируют на дискретных
элементах.
Порядок разработки принципиальной схемы усилителя во многом зависит от
предъявляемых к нему требований. Если заданы выходная мощность и выходное
сопротивление усилителя, то проектирование следует начинать с выходного
каскада, а затем переходить к проектированию остальной части. Если же
определенные требования предъявляются как к входной, так и к выходной частям
усилителя, то сначала решаются вопросы реализации входного и выходного
каскадов, а потом проектируют часть усилителя, связывающую их.
Учитывая допустимую нестабильность коэффициента усиления и получения
требуемых параметров, решается вопрос о виде обратной связи и ее глубине. Так
как с введением обратной связи коэффициент усиления уменьшается, то это
должно быть учтено при выборе количества применяемых интегральных
микросхем (ИМС). Петлевое усиление можно определить из общего выражения
dK ос
dК
d ос
,
K ос
К (1 ос К ) ос
если известно изменение коэффициента усиления К.
При достаточно стабильных параметрах применяемых в цепи обратной связи
элементов можно считать, что d ос 0. Тогда
К ос
dК / К
1.
dК ос / К ос
Так, если коэффициент усиления усилителя без обратной связи может
изменяться на 50% (dК/К=0,5) и при этом требуется, чтобы при введении
обратной связи Кос не изменялся более чем на 0,5% (dКос/Кос = 0,005) , то при doc
0 необходимо петлевое усиление ocК = 99
При заданном значении Кос и некоторой глубине обратной связи определяют
коэффициент усиления усилителя с разомкнутой обратной связью
К=Кос(1+ocК).
Решив вопрос о структуре усилителя, количестве ИМС, используемых в нем,
виде и глубине обратной связи, составляют ориентировочно принципиальную
схему. При непосредственной связи между ИМС необходимо согласовывать
уровни выходного сигнала предыдущей ИМС с допустимым входным сигналом
последующей. Кроме того, необходимо обеспечивать защиту входных цепей
ИМС от возможных аварийных изменений входного сигнала.
Нелинейные искажения, заданные на проектируемую часть усилителя, обычно
не распределяют между ИМС, а все значения коэффициента гармоник отводят на
выходной каскад, работающий в режиме большого сигнала (или предоконечный,
если в выходном каскаде используются повторители напряжения). Это
обусловлено тем, что наибольшие нелинейные искажения возникают при
больших уровнях усиливаемого сигнала, при которых начинает сказываться
нелинейность характеристик транзисторов.
1.3.2. Частотная характеристика многокаскадного усилителя
Частотные искажения, вносимые каждой ИМС в диапазоне высоких частот,
известны из паспортных данных или могут быть определены экспериментально.
41
Результирующий коэффициент частотных искажений усилителя находят как
произведение соответствующих коэффициентов отдельных ИМС:
Мв = Мв1Мв2…Мвn
Частотные искажения в диапазоне низких частот, как правило, обусловлены
влиянием цепей связи между отдельными усилительными каскадами. В
зависимости от особенностей усилителя частотные искажения между цепями
связи распределяют равномерно или неравномерно. При равномерном
распределении частотные искажения каждой цепи связи определяют из
выражения
Мн1 = Мн2 = n М Н .
Определим полосу пропускания многокаскадного усилителя на дискретных
элементах, состоящего из п идентичных каскадов. Как известно, полоса
пропускания усилителя F =FВ-FН, где FВ и Fн — соответственно верхняя и
нижняя частоты, относительное усиление которых y =1/ 2 .
Ввиду того, что FН много меньше, чем FВ, полосу пропускания усилителя
можно определить как FFв.
Если не учитывать инерционность транзистора, то
Fв =1/(2RC),
где R=RвыхRн; С =Свых+Свх+См; Rвых — выходное сопротивление усилителя; Rн
— сопротивление нагрузки; Свх, Свых, См — соответственно входная, выходная
емкости и емкость нагрузки (или монтажа). Рассмотрим выражение обобщенной
частотной характеристики, нормированной по абсолютнной величине
коэффициента передачи на средних частотах Kmaхx:
y
K
1
1
1
в
.
2
M в K max
1 ( F / Fв ) 2
1 В
В приведенном выражении Кв и Кmaхx — соответственно коэффициент усиления
усилителя в области верхних и средних усиливаемых частот.
Обозначим F/Fв через хв, тогда
y (1 xв2 ) 1/ 2 .
Учитывая, что полоса пропускания усилителя измеряется на уровне
y
1
2 1/ 2 ,
2
получим xв=1. При включении же n одинаковых усилителей:
y= (1+xв2)-n/2
Приравнивая y=1/
(1+xв2)-n/2 = 2–1/2,
откуда
2 2 1 / 2 ,
находим
1
xв 2 n 1 .
В данном случае xв=Fвn/Fв характеризует относительное сужение полосы
пропускания многокаскадного усилителя по сравнению с однокаскадным при
отсчете полосы на уровне 0.7=1/2.
Зависимость сужения полосы от числа каскадов приведена в табл.2.1.
Таблица 2.1
n
1
2
3
4
5
6
xn
1
0,64
0,51
0,435
0.39
0,35
42
Заметим, что в двухкаскадном усилителе полоса сужается в 1.55 раза. Сужение
полосы почти в 2 раза дает трехкаскадный усилитель и т.д.
В области низких частот для многокаскадного усилителя, состоящего из n
одинаковых каскадов, справедливо равенство:
y
KН
1
1
2
n
K max
1 ( Н ) )
( 1 ( F / FН ) 2 ) n
,
где τн=1/2πFн = С(Rг + Rвх), С — разделительная емкость; Rвх — входное
сопротивление рассматриваемого усилителя. Роль RГ может выполнять выходное
сопротивление предыдущего каскада.
Следует также учитывать, что при наличии цепи эмиттерной стабилизации
искажения на низких частотах будет вносить также и конденсатор в эмиттерной
цепи.
Обозначив F/FН через хН, получим для многокаскадного усилителя
y (1 x Н 2 )
n
2
.
1
Приравнивая y= 2 1 / 2 , получим (1 xН 2 ) n / 2 2 2 , откуда находим
xн
1
1
2 n1
.
В данном случае хн=Fнn/Fн характеризует относительное изменение нижней
граничной частоты n-каскадного усилителя по сравнению с однокаскадным
усилителем.
Полученные формулы для хв и хн показывают, что полоса пропускания
многокаскадного усилителя оказывается значительно уже по сравнению с
однокаскадным, поскольку Fнn увеличивается, а Fвn уменьшается.
Требования к граничной частоте f используемых в каскадах транзисторов,
можно определить следующим образом:
f f 1
fВ
n
M В2 1
,
где n — количество усилительных каскадов.
1.3.3. Многокаскадные усилители в интегральном исполнении
Одиночные усилительные каскады, выполненные как на биполярных, так и на
полевых транзисторах, широко используются при проектировании аналоговых
ИМС. Аналоговые ИМС (АИМС) предназначены для преобразования и обработки
сигналов, изменяющихся непрерывно и во времени. Они находят применение в
аппаратуре воспроизведения и усиления звуковых сигналов, радиоприемниках и
телевизорах, видеомагнитофонах и измерительных приборах, технике связи и т.д.
АИМС — конструктивно законченное устройство, которое в совокупности с
ограниченным количеством внешних радиоэлементов позволяет создавать
сложный завершенный функциональный узел.
Функциональный узел — это группа радиоэлементов, объединенных
конструктивно и технологически в сборочную единицу (модуль),
предназначенную для создания некоторой законченной части радиоэлектронной
аппаратуры, например, усилителя, фильтра, источника питания и т.п.
43
Взамен традиционного метода изготовления функциональных узлов путем
сборки их из готовых радиокомпонентов в модули с применением межсоединений
и конструктивных элементов в АИМС процессы изготовления входящих в узел
радиокомпонентов и объединения их в функциональную конструктивно
завершенную структуру совмещаются. Такая технология называется
интегральной.
Интегральная технология изменила представление об оптимальных
функциональных структурах радиоэлектронных устройств и их функциональном
базисе. Появились новые принципы и способы конструирования аппаратуры,
оказывающие
значительное
влияние
на
все
этапы
изготовления
радиоэлектронных устройств, способы их эксплуатации и существенно
расширяющие сферу их применения. Сформировалась специальная отрасль
электроники — микроэлектроника, решающая проблемы конструирования и
производства электронных изделий на базе интегральной технологии.
В настоящее время стандартизированы количественные и качественные
показатели сложности ИМС, характеризуемые числом содержащихся в них
элементов. По сложности ИМС подразделяются на малые, средние, большие, и
сверхбольшие интегральные микросхемы. Повышение уровня интеграции
микросхем является прогрессивным направлением, которое помогает улучшить
функциональные и эксплуатационные показатели радиоэлектронной аппаратуры.
С помощью интегральной технологии можно изготовить большинство
маломощных функциональных узлов в виде ИМС. Однако, промышленное
производство микросхем определенного типа целесообразно лишь при их
массовом применении. При малом объеме сбыта затраты на разработку и
подготовку производства значительно превысят стоимость ИМС, и их
применение окажется нецелесообразным.
Следует отметить, что АИМС относятся к комплектующим изделиям, не
имеющим самостоятельного назначения, а применяются лишь в совокупности с
другими изделиями как составные части более сложных и различных по
назначению устройств.
Применение ИМС позволяет значительно уменьшить габариты аппаратуры и
ее массу, значительно повысить надежность, уменьшить потребляемую
электрическую мощность и стоимость аппаратуры. Кроме того, применение ИМС
дает возможность улучшить технологию производства аппаратуры и в ряде
случаев получить такие параметры, которые в усилителях при дискретном
исполнении получить практически невозможно.
При использовании ИМС отпадает необходимость в расчете, сборке и
настройке отдельных каскадов. В этом случае на первый план выдвигаются
вопросы согласования отдельных ИМС, введения цепей обратных связей,
обеспечивающих получение необходимых параметров, обеспечение устойчивости
всей системы, охваченной цепями обратной связи и т.д.
В настоящее время промышленностью разработано и выпускается
значительное количество различных ИМС, в которых усилители являются одним
из функциональных узлов среди множества узлов другого назначения. На
сегодняшний день перед специалистом-разработчиком стоит задача правильного
выбора и оптимального использования готовых ИМС.
44
Для того чтобы различить, какую функцию выполняет конкретная ИМС,
принята система условных обозначений, отражающая их принадлежность к
определенным сериям, классам и группам. Серии стремятся разработать так,
чтобы из микросхем, входящих в нее, можно было построить законченное
устройство.
Условное обозначение ИМС состоит из следующих элементов. Первый
элемент — цифра, обозначающая группу ИМС. По конструктивнотехнологическим признакам ИМС подразделяются на три группы, которым
присвоены обозначения: 1, 5, 7 — полупроводниковые; 2, 4, 6, 8 — гибридные;
3 — прочие (пленочные, вакуумные, керамические и т. д.). Второй элемент — две
цифры, обозначающие порядковый номер разработки серии ИМС. Эти элементы
обозначают серию микросхем. Третий элемент — две буквы, обозначающие
подгруппу и вид ИМС в соответствии с табл. 1.2, в которой отражено обозначение
усилителей в интегральном исполнении.
Таблица 2.2
Усилители
Обозначение
Высокой частоты
УВ
Промежуточной частоты
УР
Низкой частоты
УН
Импульсных сигналов
УИ
Широкополосные
УК
Повторители
УЕ
Считывания и воспроизведения
УЛ
Индикации
УМ
Постоянного тока
УТ
Операционные
УД
Дифференциальные
УС
Прочие
УП
ИМС, предназначенные специально для усиления электрических сигналов,
имеют большую степень интеграции. Трудности изготовления реактивных
элементов заставили разрабатывать ИМС в основном в вариантах
с
непосредственными связями. Можно выделить два основных типа интегральных
усилителей: простые усилители с непосредственными связями между каскадами и
глубокой отрицательной обратной связью, и усилители на основе использования
дифференциальных усилительных каскадов. К последнему типу относятся
операционные усилители.
45
Лекция 5
1. УСИЛИТЕЛИ МОЩНОСТИ
Общие сведения об усилителях мощности
Усилителями мощности называются такие усилители, которые, прежде всего, должны
обеспечивать высокую выходную мощность; усиление по напряжению в них является
второстепенным фактором. Высокая выходная мощность должна быть получена в усилителях
мощности при наименьшем потреблении энергии от источника питания и допустимых уровнях
нелинейных и частотных искажений.
Усилитель мощности представляет собой обычно многокаскадный усилитель, состоящий из
входного, предоконечного и оконечного каскадов. Технические характеристики усилителя
мощности в основном определяются выходным каскадом. Мощный выходной каскад является
основным потребителем электрической энергии. Он вносит основную часть нелинейных
искажений и занимает объем, сравниваемый с объемом остальной части усилителя. Поэтому при
выборе и проектировании выходного каскада усилителя мощности основное внимание обращают
на возможность получения максимального КПД, малые нелинейные искажения и габаритные
размеры.
В усилителе мощности высокая выходная мощность при максимальном КПД может быть
получена при определенном согласовании его внутреннего сопротивления с сопротивлением
нагрузки. С этой целью в усилителях мощности нередко используют трансформаторы.
Правильным выбором коэффициента трансформации всегда можно добиться необходимого
согласования и получить в нагрузке максимально возможную мощность.
В выходных каскадах усилителей используются различные режимы работы транзисторов,
начиная от традиционного класса А до новейшего цифрового класса D.
В однотактных усилителях класса А больший ток смешения обеспечивает открытое состояние
транзисторов в течение всего периода существования сигнала. Этому режиму присущ низкий
уровень искажений, но одновременно и низкий кпд, который не превышает в лучшем случае 50%.
Последний не позволяет создать усилитель класса А с достаточно большой выходной мощностью,
приемлемых габаритов и умеренным выделением тепла.
В усилителях класса В смещение или начальный ток уменьшен так, чтобы каждый из
комплементарных транзисторов был открыт поочередно, пропуская положительную и
отрицательную части входных сигнала соответственно. Этим достигаются меньший нагрев и
более высокий кпд (теоретически максимум 78%).
Многие изготовители высококлассной техники выпускают усилители, режим выходного
каскада которых можно переключать из класса А в класс В. Тем самым можно выбрать меньшие
искажения, но ограниченную динамику или повышенную мощность с некоторыми потерями в
коэффициенте нелинейных искажений.
Разработчики всегда демонстрировали стремление создать экономичные усилители мощности.
Сначала были предприняты многочисленные попытки объединить эффективность класса В и
низкие искажения класса А. Так появились варианты переходного класса АВ, потом в середине
70-х его разновидности с динамическим, т.е. зависящим от уровня сигнала, смещением типа Super
Class A, New Class A, Non-switching amp и т.д. Многие фирмы предлагали аналоговые усилители с
изменяющимся в зависимости от уровня сигнала напряжением питания. Первой на этом пути еще
в конце 70-х была Hitachi, которая и предложила для обозначения этого режима работы название класс Н. В тех усилителях напряжение питания выходных каскадов могло принимать одно из трех
дискретных значений. Сегодня подобные усилители используются во многих моделях Technics,
обозначение которых Н+ показывает на небольшое отличие в схемотехнике. Здесь уровень
питания меняется только на одну ступень, повышая выходную мощность в полтора раза.
В усилителях класса D выходные транзисторы работают как ключи, которые либо полностью
открыты, или полностью закрыты. Поскольку в таком режиме работы практически отсутствует
выделение тепла, кпд усилителя приближается к 100%. Поскольку непрерывный аналоговый
сигнал невозможно воспроизвести только включением и выключением выходного каскада,
усилители данного класса представляют аналоговый сигнал путем изменения временного отрезка
между этими переключениями. Такой процесс называется широтно-импульсной модуляцией –
ШИМ. ШИМ – усилители в настоящее время используются в автомобильных усилителях и
стационарной аппаратуре с выходной мощностью несколько сот ватт.
Но наиболее перспективны усилители мощности класса D в полностью цифровом усилителе,
поскольку ШИМ - сигнал может быть получен непосредственно с выхода CD - или DVDпроигрывателя или другого цифрового источника.
В таком усилителе реально заранее в
цифровой форме осуществить любую коррекцию возможных искажений, вызванных работой
самого ключевого каскада.
В усилителях мощности применяют все три схемы включения транзисторов: с ОБ, ОЭ, ОК. В
схеме с ОБ, как известно, транзистор имеет наибольшее значение напряжения на коллекторе и
сравнительно линейную переходную характеристику (даже при больших значениях выходного
сигнала). Поэтому схема с ОБ позволяет получать наибольшую выходную мощность при заданном
коэффициенте гармоник.
Схема с ОЭ, как известно, имеет максимальное усиление по мощности. Однако нелинейные
искажения в схеме с ОЭ больше, чем в схеме с ОБ. К тому же требуется значительная мощность
для питания цепей стабилизации транзистора по постоянному току.
Схема с ОК имеет малое выходное сопротивление и в настоящее время находит широкое
применение в бестрансформаторных двухтактных усилителях мощности.
Однотактные выходные каскады на транзисторах
Простейшим способом подключения нагрузки в усилителе мощности является
непосредственное ее включение в выходную цепь транзистора, как показано на рис. 2.1.
Достоинство данного включения связано с простотой схемы, недостатком является протекание
через нагрузку постоянной составляющей тока электропитания и невысокий КПД.
E
Rк
R1
С
Вход
R2
Рис. 2.1. Усилитель мощности с включением нагрузки в коллекторную цепь транзистора
Определим максимальную выходную мощность для схемы рис. 2.1, считая, что остаточные
напряжения и ток усилительного элемента равны нулю.
Мощность сигнала, выделяемая в
нагрузке, равна
Pн max 0,5I 2 m вых Rн 0,5I mвыхU m вых 0,5I 0 0,5E 0,25I 0 E
.
Найдем максимально возможный КПД,
0,25 I 0 E
max Pmax / P0
0,25
I0 E
.
Сопротивление нагрузки, необходимое для получения такого КПД, имеющего место лишь при
полном использовании, как тока, так и напряжения, равно
Rн U mвых / I m вых E /( 2 I 0 )
Изменение сопротивления нагрузки, уменьшение амплитуды входного сигнала и наличие
остаточного напряжения и тока транзистора приводят к уменьшению максимального кпд каскада.
Усилитель мощности, схема которого приведена на рис. 2.1, может быть использован для
усиления сигналов произвольной формы в режиме А или сигналов одной полярности в режиме В.
При отсутствии в нагрузке индуктивной составляющей максимальное напряжение источника
питания выбирается из условия E ≈ Uкэ max. Ток покоя Iо равен сумме Im вых и остаточного тока
транзистора Imin. Максимальный коллекторный ток
I k m 2 I 0 (1,4 1,5) Pн / Rн
Напряжение источника питания для рассматриваемого усилителя
E 2U mвых U ост 2 Pн Rн U ост
.
где Uост — остаточное напряжение, определяемое по семейству выходных характеристик
биполярного транзистора.
Реально кпд, получаемый от каскада с непосредственным включением нагрузки, меньше
предельного из-за остаточного тока и напряжения и не превышает 20%. Низкий кпд и наличие
постоянной составляющей в нагрузке тока ограничивает использование данного усилителя
мощности.
Постоянную составляющую тока коллектора можно исключить, если RН Включить через
конденсатор. Однако в этом случае кпд будет еще меньше (около 8,7%) при синусоидальном
входном сигнале. Реально кпд получается 5 - 6 %, что ограничивает использование таких каскадов
в качестве усилителей мощности.
Для получения большего значения кпд и устранения постоянной составляющей коллекторного
тока транзистора в нагрузке применяют трансформаторные усилители мощности.
На рис. 2.2, а, приведена простейшая cхема однотактного усилителя мощности с
трансформаторным включением нагрузки. Для анализа ее работы рассмотрим семейство
выходных характеристик транзистора с построенной линией нагрузки для переменного тока (рис.
2.2, б).
Линия нагрузки для постоянного тока при Uвх = 0 будет проходить через точку А вертикально,
если пренебречь падением напряжения на сопротивлении первичной обмотки трансформатора.
Линия нагрузки по переменному току проходит через выбранную рабочую точку с координатами
Uок и Iок под углом, определяемым действующим сопротивлением нагрузки в коллекторной цепи R
′
н
Rн Rн / n 2 ; n 2 / 1 ,
где п — коэффициент трансформации трансформатора;
ω1 , ω2 - число витков вторичной и первичной обмоток трансформатора.
Для получения от транзистора наибольшей выходной мощности линию нагрузки следует
проводить как касательную к кривой Рк мах в пределах области, ограниченной допустимыми
значениями
Iк max и Uк max. При работе усилителя базовый ток Iб меняется от Iб min до Iб max. При
этом ток коллектора меняется от Iк min до Iк max.
Iкк
E
R1
Iкбmaxmax
Rкmax
Rн
A
Iкок
Вход
R2
Iкбmaxmin
Iккmin
Uок
Uкэ
E
Uкmax
а)
б)
Рис. 2.2. Усилитель мощности с трансформаторным включением нагрузки — а и выбор его режима
работы — б
Из рис. 2.2, б, видно, что амплитуда переменного тока Iк m и напряжения Uк m транзистора равны
соответственно
U
U k min
I
I k min
U km k max
I кm k max
2
2
;
.
Если током Iк min и напряжением Uк min можно пренебречь, то
Iк m = 0,5 Iк max;
Uк m = 0,5 Uк max.
Для получения минимальных нелинейных искажений координаты рабочей точки следует
выбирать из условия симметрии полуволн тока и напряжения. При этом
I 0 k I k min I km I km ,
U 0 k U k min U km U km . .
Определим мощность в нагрузке
Pн 0,5U кm I кm 0,5U ок I ок .
Мощность, рассеиваемая на коллекторе транзистора при отсутствии входного сигнала, будет
равна
Pк U ок I ок 2Pн .
Следовательно, при заданной Pн выбор типа транзистора в рассматриваемой схеме должен
производиться с учетом равенства
Pк max 2Pн .
Определим кпд усилителя, пренебрегая потерями в трансформаторе
Pн max / Pо 0,5
,
где Р0 — мощность, потребляемая от источника питания;
I
кm
I ок — коэффициент использования тока коллектора;
U km
U 0 k — коэффициент использования коллекторного напряжения.
При идеализированных характеристиках транзистора коэффициенты использования тока и
напряжения можно считать равными единицы. В этом случае max = 0,5. В реальной схеме может
составлять 35 – 40 %.
Наклон линии нагрузки на рис. 2.2 б, определяется, как указывалось выше, действующим
сопротивлением нагрузки в коллекторной цепи. При заданном значении мощности в нагрузке
сопротивление нагрузки
Rн' U 2 ок /(2Pн ) E 2 к /(2Pн ).
Приведенное выражение дает возможность определить коэффициент трансформации
выходного трансформатора при заданном значении напряжения источника питания.
Двухтактные усилители мощности
Двухтактные усилители мощности позволяют получить более высокий кпд, чем однотактный
усилитель мощности. Для этого используется режим В или АВ. В двухтактных схемах усилителей
мощности использование режима А обычно не оправдывается из-за сравнительно невысокого
КПД всей схемы.
Двухтактные выходные каскады можно подразделить на каскады с согласующими выходными
трансформаторами и бестрансформаторные.
На рис. 2.3 приведена схема двухтактного трансформаторного усилителя мощности. Такой
усилитель обладает рядом достоинств по сравнению с однотактными схемами. Например, как в
отсутствие входного сигнала, так и во время работы постоянные составляющие коллекторных
токов создают в сердечнике трансформатора магнитные потоки противоположных направлений.
Следовательно, в сердечнике трансформатора отсутствует (или значительно подавлена при
неполной симметрии) постоянная составляющая магнитного потока. Это значительно упрощает
конструкцию трансформатора и позволяет уменьшить его размеры.
Существенным достоинством двухтактных каскадов является уменьшение нелинейных
искажений. Действительно, при симметрии плеч кривая суммарного магнитного потока будет
симметрична относительно оси времени, а, следовательно, она не будет содержать четных
гармоник. В свою очередь, это дает возможность, помимо класса А, применять более экономичные
режимы АВ и В, при которых как раз характерно появление нелинейных искажений за счет
образования четных гармонических составляющих.
R1
VT1
Iкк1
R2
E
Вход
Rнн
VT2
Iкк2
Рис. 2.3. Схема трансформаторного двухтактного усилителя мощности
Достоинством трансформаторного двухтактного каскада является также значительное
подавление на выходе схемы пульсаций напряжения источников питания, кратных частоте
питающей сети, а также различных синфазных сигналов. По этой причине иногда двухтактная
схема применяется во входных и предварительных усилителях с низким уровнем входного
сигнала.
К недостаткам, свойственным двухтактным схемам, относится требование довольно строгой
симметрии схемы и идентичности транзисторов и обмоток трансформатора, а также
необходимость получения на входе парафазного сигнала. Обычно для этой цели применяют
либо трансформаторы, как показано на рис. 2.3, либо специальные фазоинверсные предоконечные
усилители.
Несмотря на отмеченные выше преимущества двухтактных трансформаторных усилителей
мощности, следует отметить, что применяемый в них трансформатор не технологичный элемент;
он имеет большие массу и габариты, что не позволяет выполнять трансформаторные усилители в
виде интегральных микросхем. Кроме того, трансформатор является источником значительных
частотных искажений в области как низких, так и высоких частот, больших наводок, снижает КПД
усилителя мощности. Большие фазовые сдвиги, вносимые трансформатором между входным
сигналом и выходным, не дают возможности охватить усилитель глубокой отрицательной
обратной связью и тем самым повысить качество усилителя.
Несмотря на это, в настоящее время отдельные фирмы выпускают высококлассные ламповые
усилители звуковой частоты с применением специальных разделительных и выходных
трансформаторов. Применение специальных материалов и конструкции трансформаторов
позволило расширить их частотный диапазон от десяти Гц до 50 кГц.
Отмеченных выше недостатков лишен бестрансформаторный усилитель мощности. Появление
мощных транзисторов с низкоомным выходным сопротивлением обусловило широкое
применение бестрансформаторных усилителей мощности и при больших уровнях выходной
мощности.
Достоинством бестрансформаторного усилителя мощности является: малые масса и габариты,
малые частотные искажения, больший кпд, возможность интегрального исполнения. При
массовом производстве переход к бестрансформаторным усилителям мощности дает
существенную экономию меди и трансформаторной стали, уменьшает общую трудоемкость
изготовления аппаратуры.
На рис. 2.4, а - г приведены возможные схемы оконечных каскадов бестрансформаторных
усилителей мощности. Как видно из приведенного рисунка, они могут быть реализованы либо на
транзисторах различного типа проводимости (комплементарные транзисторы), либо на
транзисторах одного типа проводимости. Питание таких усилителей мощности может
производиться от двух источников с заземленной средней точкой, либо от однополярного
источника. В последнем случае нагрузка обычно подключается к выходному каскаду через
разделительный конденсатор.
Нагрузка в этих усилителях может либо подключаться через разделительный конденсатор к
общей шине, либо к средней точке двух источников питания. Необходимый режим работы
каждого транзистора обеспечивается напряжением, действующим на его базе:
U эб1 Eбэ1 U1 (t );
U эб 2 Eбэ 2 U 2 (t ),
VT1
E
Iкк1
Uэбmax1
Uэбmax1
где Ебэ1 , Ебэ2 — постоянные напряжения, действующие на базах соответствующих
транзисторов. На рис. 2.4 показаны также управляющие сигналы с учетом фаз, которые
обеспечивают нормальную работу выходных каскадов. Управление комплементарных
транзисторов осуществляется синфазными сигналами, а транзисторов одного типа
электропроводности – противофазными. Получение противофазных сигналов требует применения
специальных транзисторных фазоинверсных усилителей, что в некоторой степени усложняет
схему усилителя мощности. Управление комплементарными транзисторами существенно
упрощается – входной сигнал обычно подается их объединенные входы.
VT1
E/2
Iкк1
Rн
Rн
VT1
Uэбmax2
Uэбmax2
Uэбmax1
Iкк2
VT2
Iкк2
VT2
бmax)
Uэбmax1
a)
Е/2
Iкк1
VT1
Rн
Rн
Iкк2
VT2
Uэбmax2
Uэбmax2
E/2
Iкк1
в)
Iкк2
VT2
Е/2
г)
Рис. 2.4. Возможные схемы оконечных каскадов бестрансформаторных усилителей мощности: а, б — на
транзисторах различного типа проводимости; в, г — на транзисторах одного типа проводимости
Принцип работы бестрансформаторного усилителя мощности
Рассмотрим особенности работы оконечных каскадов, приведенных на рис. 2.4. При емкостной
связи оконечного каскада с нагрузкой необходим один источнике с напряжением, равным Е.
Емкость конденсатора, С следует выбирать из соотношения
1/ н C < Rн
где н - нижняя граничная частота усиления. При выполнении этого условия напряжение на
конденсаторе не успевает заметно измениться в течение периода колебаний усиливаемого сигнала,
и его поэтому можно считать постоянным и равным 0,5 Е. Таким образом, последовательно с
нагрузкой как бы включается дополнительный источник питания с напряжением равным 0,5 Е.
При положительной полуволне входного сигнала в схеме рис. 2.4 а, открывается верхний
транзистор VT1 и ток от источника питания проходит по цепи: плюс источника питания Е,
коллектор-эмиттер транзистора VT 1, конденсатор С, Rн, минус источника питания Е. При
отрицательной полуволне входного синусоидального сигнала транзистор VT1 закрыт. Роль
источника питания выполняет конденсатор С, напряжение на котором равно 0,5Е. Ток в этом
случае проходит по следующей цепи: положительная обкладка конденсатора С, эмиттерколлектор транзистора VT2, Rн, отрицательная обкладка конденсатора С. Во время отрицательного
полупериода ток от источника питания не потребляется. Стабилизация средней точки усилителя
мощности с емкостной связью нагрузки вызывает большие трудности, чем в каскадах с
непосредственной связью. По этой причине в усилителях мощности чаще применяется
гальваническая связь нагрузки с источником питания. Нижняя граничная частота в таких
усилителях мощности определяется только емкостями конденсаторов на входе усилителя и в
фильтре выпрямителя. Для обеспечения симметрии плеч оконечного каскада в нем лучше
применять комплементарные транзисторы, так как в такой схеме оба транзистора включены по
схеме ОК.
I I I
к2 .
При правильном выборе управляющих сигналов в схемах рис. 2.4 ток н к 1
В свою очередь, ток Iк = f (Uэб). На рис. 2.5 приведена зависимость Iк=f(Uэб), которую называют
также проходной динамической характеристикой. Эта характеристика хорошо апроксимируется
отрезком прямой:
S (U эб
Iк
0
Eбэo )
при U эб Eбэo
при U эб Eбэo
,
где S — крутизна транзистора, мА/В.
Для работы в режиме В напряжение смещения должно выбираться равным Ебэo. Тогда при
входном напряжении, равном нулю, через транзисторы протекает ток покоя Iок (см. рис. 2.5),
который заряжает конденсатор С до напряжения, равного 0,5Е. Эквивалентную схему для этого
случая можно представить в виде рис. 2.7.
В этой схеме оба транзистора заменены эквивалентными резисторами, а конденсатор С
заменен источником, напряжение которого равно 0,5Е.
Iкк
Rнкэ1
Е/2
Е
Rнкэ2
Iкок
Е бmaxэ 0
1В
Uэбmax,В
Рис. 2.5. Проходная динамическая характеристика
Рис. 2.6. Эквивалентная схема
усилителя мощности при Uвх = 0
В динамическом режиме каждое плечо двухтактного усилителя мощности можно представить
в виде эквивалентной схемы, состоящей из нагрузочного резистора, транзистора и источника,
равного 0,5E. Это справедливо для всех схем, приведенных на рис. 2.4.
Рассмотрим работу усилителя мощности при синусоидальном сигнале на входе
Uвх=Umsin(t).
Тогда, напряжение между базой и эмиттером транзистора
Uбэ = Eбэо + Um sint.
Так как
Iк = S(Uбэ – Eбэо),
то получаем, что импульсы коллекторного тока
Iк1 = SUm sin(t),
что справедливо в течение положительных полупериодов синусоидального сигнала.
Аналогично можно получить выражение для тока второго транзистора
Iк2 = – SUm sint.
Если транзисторы имеют одинаковые параметры, то ток в нагрузке
Iн = SUm sint = Iкm sint.
В идеальном случае этот ток будет синусоидальным, так как не будет содержать высших
гармоник.
Среднее значение тока потребляемого транзисторами VT1 или VT2 в течение одного
полупериода в соответствии с разложением в ряд Фурье импульсов коллекторных токов
Iср1 = Iср2 = Iср = Iкm/.
При анализе двухтактных схем оконечных каскадов широко используется принцип
совмещения проходных динамических характеристик транзистора. Идеальная совмещенная
проходная динамическая характеристика представляет собой прямую линию с крутизной S,
проходящей через начало координат см. рис. 2.7. Выходной ток при такой характеристике не
будет искажен.
а)
б)
Рис. 2.7. Построение сигнала на выходе усилителя мощности при идеальной совмещенной проходной
динамической характеристике: а — идеальная совмещенная проходная динамическая характеристика;
б — форма тока в нагрузке
Совмещенная проходная характеристика будет прямой только в том случае, если проходные
динамические характеристики транзисторов идеальны (т. е. аппроксимированы отрезками прямых
линий) и напряжение смещения Есм=Ебэо. Реальные характеристики нелинейные как при малых,
так и при больших значениях коллекторного тока.
Если оконечные транзисторы работают без смещения, то из-за нелинейности их характеристик
в области малых токов совмещенная проходная динамическая характеристика, будет нелинейная.
В свою очередь, это приводит к искажению сигнала в нагрузке в области малых токов, которые
иногда называют искажениями типа «ступеньки». Правильным выбором напряжения смещения
можно устранить эти искажения. Для этого Ебэо должно быть равно напряжению отсечки.
Энергетические характеристики оконечного каскада
Проведем расчет бестрансформаторного усилителя мощности для одного плеча, поскольку
процессы, происходящие в коллекторных цепях транзисторов, одинаковы. Для определения
энергетических характеристик оконечного каскада рассмотрим семейство выходных
характеристик транзистора с построенной динамической линией нагрузки. Построим также
временные диаграммы тока и напряжения, как показано на рис. 2.8.
Рис. 2.8. Построение временных диаграмм напряжения и тока в усилителях мощности для одного
транзистора
Для режима В ток покоя (при Uвх = 0) можно считать равным нулю. Обычно этот ток в режиме
В (или АВ) выбирают равным
I ок (0,01 0,02) I
k max
.
Напряжение
U
0,5 E I к R к
.
Напряжение Uкэ изменяется в соответствии с нижней диаграммой рис. 2.8.
Напряжение на нагрузке при входном синусоидальном сигнале
U н I km R н sin t U km sin t ,
кэ
U k m R
н
I
к max
R
н
SU
вх m
,
(2.1)
где S — крутизна проходной характеристики.
Введем коэффициент использования напряжения
U
н max 2U н max / E
0,5 E
.
С учетом (2.1)
2R н SU
/ E 2 I
Rн / E
.
(2.2)
Если остаточное напряжение транзистора Uкэ min = 0, то Uк m = 0,5Е и = 1. Если Uк m = 0, то =
0. Таким образом, при Uкэ 0
0 max 1 ,
вх m
k
где max 2 (0,5E U кэ min ) / E .
Из выражения (2.2) определим амплитуду импульса коллекторного тока
I k max E /( 2R н ) .
(2.3)
При = 1, Iк max = Е/(2Rн).
Определим мощность, характеризующую работу оконечного каскада. Каждое плечо усилителя
мощности потребляет ток от источника питания
P 1 P2 I к ср 0,5 E
.
Суммарная мощность, потребляемая от источника питания
Po P1 P2 E I к ср I кm E /
.
Подставляя значение Iкm из (2.3), получим
Po E 2 /( 2 Rн ) .
(2.4)
Из выражения (2.4) видно, что мощность Р0 линейно зависит от коэффициента использования
напряжения . При = 1
Po E 2 / ( 2 Rн ) .
Определим мощность в нагрузке
P н U 2 н max /( 2 Rн ) 2 E 2 / (8Rн )
(2.5)
Тогда, кпд
P н / Po
4
и линейно зависит от .. При =1 кпд максимален и равен / 4 0,785 .
Мощность, рассеиваемая на коллекторах двух транзисторов,
2Pк Po P н .
Тогда
Pk 0,5( Po P н ) 0,5 (
E2
2E2
E 2 ( 4 2 )
)
2 Rн
8 Rн
16 Rн
.
Продифференцировав полученное выражение по и приравняв нулю первую производную,
находим, что максимум рассеиваемой мощности на коллекторе транзистора имеет место при
=2=0,637 и равен
Pk max E 2 /( 4 2 R н ) E 2 / 40R н
.
(2.6)
Из выражения (2.6) найдем значение
E 2 4 2 R н P к max
и подставим это значение в (2.5). Получим
P н 0,5 2 2 Pk max 4,93Pk max .
Отсюда следует, что полезная мощность в нагрузке в 4,93 раза превышает мощность,
рассеиваемую одним транзистором. Обычно считают Рн = (4 - 5) Рк max. Последнее выражение
позволяет по заданной мощности в нагрузке определить Рк max и выбрать транзистор по допустимой
мощности, рассеиваемой на его коллекторе.
Режим АВ для усилителя мощности
Переходные искажения, возникающие в усилителе мощности в режиме В, вызывают
значительные нелинейные искажения. Как видно из переходной характеристики (см. рис. 2.5)
вблизи нуля ток в открытом транзисторе достаточно мал, а его внутреннее сопротивление велико.
В результате прирост напряжения на нагрузке в этой области оказывается меньше, чем изменение
входного сигнала, что и является причиной излома данной характеристики.
При задании небольшого начального тока
транзисторов их внутреннее сопротивление
уменьшается, переходная характеристика становится более линейной, что существенно уменьшает
нелинейные искажения. Такой режим и называется режимом АВ. В этом режиме переходные
искажения настолько малы, что с помощью обратной связи легко могут быть уменьшены до
пренебрежимо малой величины.
Существуют различные способы задания напряжения смещения в оконечных каскадах. Один
из способов задания напряжения смещения показан на рис. 2.9. Для задания малого тока покоя
между базами транзисторов VT1 и VT2 в данной схеме приложено постоянное напряжение, около
1,4 В. С этой целью в схему введены диоды VD 1 и VD2. Падение напряжения на диодах VD1 к
VD2 составляет примерно U1=U2= 0,7B. При таком напряжении через транзисторы VT1 и VT2
течет небольшой начальный ток. Величина генератора тока I1 выбирается больше максимального
базового тока транзисторов VT1 и VT2, чтобы диоды VD1 и VD2 при максимальном входном
сигнале не запирались. Источники постоянного тока не следует заменять резисторами, так как в
этом случае ток через диоды будет убывать при возрастании входного сигнала.
+
Е
I0
Uвхвх
VD1
VD2
I0
VT1
Rнэ1
C
Rнэ2
VT2
Rнн
Е-
Рис. 2.9. Задание начального смещения с помощью диодов
Основная проблема режима АВ состоит в необходимости поддержания постоянного тока покоя
транзисторов VT1 и VT2 в широком диапазоне рабочих температур. При увеличении
температуры, как известно, ток покоя увеличивается. Это приводит к дальнейшему росту
температуры транзисторов и в результате к их тепловому разрушению. Такой эффект называется
положительной термической обратной связью.
Для компенсации положительной связи при повышении температуры транзистора на 1°С
необходимо уменьшить напряжение Uэб, примерно на 2,5 мВ. Эту роль дополнительно и
выполняют диоды VD1 и VD2, кроме задания напряжения смещения в схеме рис. 2.9. Конечно,
такая температурная компенсация оказывается неполной, так как существует значительное
различие в температурах перехода транзистора и его корпуса. Поэтому применяются
дополнительные меры по стабилизации тока покоя. Для этого в схему усилителя мощности
включаются резисторы R1 и R2, которые осуществляют отрицательную обратную связь по току.
Эффективность обратной связи увеличивается с возрастанием величины сопротивлений этих
резисторов, но при этом уменьшается выходная мощность.
По этой причине величина
сопротивлений резисторов обратной связи должна выбираться малой по сравнению с
сопротивлением нагрузки.
В промышленных образцах современных усилителей чаще всего применяются выходные
каскады в виде двухтактных эмиттерных повторителей, работающих в классе АВ (см.
упрощенную схему рис. 2.10).
Рис 2.10
Данная схема имеет ряд недостатков. Один из них – плохое использование транзисторов по
напряжению и трудность достижения высокого КПД. В данной схеме амплитуду выходного
напряжения невозможно сделать достаточно близкой к напряжению питания Ек, так как каскад
имеет коэффициент усиления по напряжению Ки меньше единицы. Амплитуда выходного
напряжения отличается от входного не менее, чем на величину падения напряжения на эмиттернобазовом переходе транзистора Т2 (Т3). А если в качестве Т2 и Т3 применяются составные
транзисторы, то величина Uбэ может достигать 1,5 В.
Кроме того, данная схема предъявляет высокие требования к предоконечному каскаду.
Чтобы получить выходное напряжение, близкое к максимальному, размах напряжения на выходе
предоконечного каскада должен достигать значения 2Ек. С этой целью в качестве предоконечного
применяется каскад с общим эмиттером (ОЭ) без цепочки эмиттероной стабилизации (см. рис.
2.10). Такое построение предоконечного каскада отрицательно сказывается на температурной
стабильности и усложняет его регулировку. Чтобы повысить температурную стабильность,
приходится вводить глубокую отрицательную обратную связь по постоянному току.
Перечисленные недостатки устраняются путем применения в качестве выходного каскада с
усилением (рис. 2.11)
Рис. 2.11
Каждое плечо каскада (рис. 2.11) представляет собой двухкаскадный усилитель по схеме
ОЭ, охваченный последовательной отрицательной обратной связью (ООС) по напряжению. При
глубокой ООС коэффициент усиления каждого плеча
1
Ки
,
ос
R1
где ос - коэффициент передачи цепи ООС. В области средних частот ос
R1 Rи .
С целью увеличения коэффициента усиления и глубины обратной связи в качестве
выходных применяются составные транзисторы. Так как от предоконечного каскада, в этом случае
не требуется большой амплитуды выходного напряжения, то имеется возможность использовать в
нем цепочку эмиттерной термостабилизации.
Расчет выходного каскада как правило, начинается с выбора величины напряжения
источника питания по заданным значениям выходной мощности Рвых и сопротивления нагрузки Rн
Ек 2 Рвых Rн .
Затем определяются максимальные величины коллекторных токов оконечных транзисторов
и мощности, рассеиваемой на них по формулам /5/:
I k max T 3 I k max T 2
Ek
,
2 Rн
Pвых max
, где
3
E2
k
2 Rн
Pk max
Pвых max
Выбор комплиментарной пары оконечных транзисторов осуществляется из следующих
условий:
И кэдоп 2 Ек
I к доп I к max
Pк доп Pк max
f hиа 2 f верхн
оценка коэффициента гармоник выходного каскада без учета действия ООС производится
по сквозной токовой характеристике с использованием метода пяти ординат /5/.
Составные транзисторы в усилителях мощности
Получение больших выходных токов в нагрузке требует применения в выходных каскадах
транзисторов с большими выходными токами. Для этих целей в усилителях мощности часто
применяют составные транзисторы. На рис. 2.12 приведена принципиальная электрическая схема
усилителя мощности, в которой на выходе используются составные транзисторы (транзисторы
VT5, VT 6 и VT9, VT10).
При работе усилителя мощности (рис. 2.12) в режиме АВ установка тока покоя транзисторов
VT5, VT 6 и VT9, VT10 связана с определенными трудностями, так как необходимо
скомпенсировать четыре зависящих от температуры напряжения база-эмиттер. Этого можно
избежать, если задать только ток покоя для предоконечных транзисторов VT5, VT6. При этом
мощные выходные транзисторы будут открываться лишь при больших выходных токах. С этой
целью величину напряжения смещения между базами транзисторов VT9 и VT10 можно выбрать
такой, чтобы падение напряжения на резисторах R8 и R9 составляло около 0,4 В (напряжение
смещения Uсм = 2 (0,4+0,7) = 2,2 В). В этом случае выходные транзисторы даже при высокой
температуре перехода оказываются закрытыми.
Рис. 2 12 Принципиальная схема усилителя мощности
Резисторы R8 и R9 одновременно являются сопротивлениями утечки для базового заряда
выходных транзисторов. Чем меньше сопротивления этих резисторов, тем быстрее будут
запираться выходные транзисторы. Это особенно важно в тех случаях, когда при изменении знака
входного напряжения один транзистор открывается, хотя второй еще не заперт. Этот эффект
наблюдается при работе усилителя мощности на повышенных частотах. В данном случае через
выходные транзисторы будет протекать сквозной ток, вызывающий дополнительный разогрев
транзисторов и увеличение тока, потребляемого от источника питания. По этой причине в
выходных каскадах усилителей мощности необходимо применять транзисторы с запасом по
частотным свойствам. Верхняя граничная частота усиления транзисторов должна быть по крайней
мере в три раза превышать наивысшую частоту входного сигнала
Из-за малого выходного сопротивления двухтактные усилители мощности легко
перегружаются и разрушаются. Поэтому в усилителях мощности целесообразно использовать
схемные решения, ограничивающие максимальную величину выходного тока. В схеме рис. 2.12
ограничение имеет место, когда один из транзисторов VT7 или VT 8 открыт. Эти транзисторы
откроются, если падение напряжения на резисторе R12 или R13 превысит значение ≈ 0,6 В. При
этом, дальнейшее возрастание базовых токов транзисторов VT 9 и VT 10 происходить не будет, а
сами транзисторы перейдут в режим работы стабилизации тока.
Максимальное значение выходного тока ограничивается величиной
Iвых max = 0,6 В / R12.
Резисторы R10 и R11 служат для защиты транзисторов ограничителя от больших пиковых
значений тока базы.
Для уменьшения переходных искажений вся схема усилителя охвачена отрицательной
обратной связью через делитель напряжения R3, R4. При этом общий коэффициент усиления
К=1 + R3/R4.
Стабильность постоянного напряжения на выходе усилителя мощности так же будет
определяться глубиной отрицательной обратной связи.
Промышленностью широко выпускается
интегральные микросхемы 174 серии,
представляющие
собой
комплект
аналоговых
микросхем,
предназначенный
для
высококачественной звуковоспроизводящей аппаратуры. В состав этих микросхем входит
предварительный усилитель, и двухтактный усилитель мощности. В зависимости от типа
микросхем выходная мощность может изменяться от 1,5 до 15 Вт.
ШУМЫ В УСИЛИТЕЛЬНЫХ КАСКАДАХ
Шумы резисторов
Шумы представляют собой важную проблему в науке и технике, поскольку они определяют
нижние пределы, как в отношении точности любых измерений, так и в отношении величин
сигналов, которые могут быть обработаны средствами электроники.
Под шумами в усилительных каскадах понимают различные флуктуации амплитуд
протекающих токов, которые накладываются на полезный сигнал и приводят к его частичному
или полному искажению. Флуктуационные шумы обусловлены тепловым движением
электрических зарядов, в первую очередь электронов. Спектр частот флуктуационных шумов
занимает очень широкую полосу от 0 до миллиметровых радиоволн. Источниками
флуктуационных шумов являются резисторы и усилительные элементы. Рассмотрим вначале
шумы резисторов.
В соответствии с современными представлениями носителями электрического тока в
проводниках являются электроны, обладающие элементарным электрическим зарядом, равным
1,6*10–19 Кл.
При отсутствии внешнего поля электроны в металлическом проводнике совершают
хаотическое движение, аналогичное тепловому движению молекул газа или жидкости. Тепловое
возбуждение электронов даже при комнатной температуре настолько велико, что электроны
перемещаются с весьма большими скоростями (около 100 км/с), при этом величина свободного
пробега электронов составляет всего 10-8 м.
Движущийся заряд (электрон) образует элементарный импульс электрического тока. Таким
образом, в объеме проводника появляются элементарные импульсы тока, длительность которых
равна времени свободного пробега. Если к проводнику приложено внешнее электрическое поле,
то на хаотическое движение электронов будет накладываться упорядоченное смещение их вдоль
электрического поля.
Упорядоченное движение в одном направлении называется электрическим током. Однако
воздействие электрического поля на каждый электрон может происходить только на длине
свободного пробега. По этой причине электрическое поле успевает за время между соударениями
изменить скорость теплового движения и энергию электрона в самой ничтожной степени, хотя
именно это изменение и является причиной тока. Таким образом, протекание тока не оказывает
сильного влияния на шумовую э.д.с., связанную с элементарными импульсами тока.
Следовательно, собственные движения электронов пропорциональны температуре тела и не
будут зависеть от протекающих токов, если последние не будут нагревать проводник. Таким
образом, причиной шума в резисторах являются флуктуации объемной плотности электрического
заряда в проводящем теле резистора, вызванные хаотическим движением носителей заряда.
Среднеквадратичное значение теплового шума в металлическом резисторе (Джонсоновский
шум) определяется по формуле Найквиста:
U 2 ш 4kTRf .
Здесь Δff — полоса частот, в которой исследуется шум, k — постоянная Больцмана.
Следует заметить, что реактивные элементы не могут генерировать шумы, потому что они не
потребляют активную энергию. Это утверждение не является очевидным, хотя это именно так. В
конденсаторе полный заряд не меняется, следовательно, шумовое напряжение не меняется. В
идеальной катушке также не будет шумового напряжения.
В том случае, когда имеется комплексное сопротивление Z, определив r(f) и x(f), можно
сказать, что шумы на концах комплексного сопротивления будут создаваться только активной
составляющей
f2
U
2
ш
4kT r ( f ) df
f1
.
2
Из формулы Найквиста для U ш следует, что в каком бы частотном диапазоне не
исследовался шум, обусловленный тепловыми флуктуациями, оказывается, что энергия,
приходящая на единицу полосы, одинакова, т. е. спектральная плотность в полосе Δff одинакова.
В силу такого характера спектра этот шум назвали белым шумом.
Дробовой шум. Электрический ток представляет собой движение дискретных зарядов, а не
плавное непрерывное течение. Конечность заряда приводит к статистических флуктуациям тока,
определяемым формулой:
1
I ш эфф I Ш R 2qI f 2
,
где q=1.610 Кл — заряд электрона, f — ширина полосы частот измерения.
Относительные флуктуации (дробвой шум) больше для меньших токов. Как и резистивный
шум Джонсона, это Гауссовский белый шум.
Шумы непроволочных резисторов: углеродистых типа ВС, УЛМ, УЛИ, БЛП,
металлизированных типа МЛТ, МЛП, композиционных ТО, КЛМ, КЛВ и пленочных — нельзя
рассчитывать по формуле Найквиста. В зависимости от конструкции и технологии изготовления
они могут оказаться больше теплового шума. При этом наблюдается зависимость шумов от
напряжения, падающего на резисторе, и от силы тока, протекающего через него.
В действительности проводящие слои непроволочного резистора состоят из большого числа
микроскопически малых проводящих частиц, соприкасающихся друг с другом. При протекании
тока через проводящий слой его проводимость несколько изменяется случайным образом
вследствие нарушения контактов между токопроводящими частицами. Флуктуации проводимости
вызывают случайные колебания тока, которые создают на сопротивлении напряжения шума.
Тепловые шумы непроволочного резистора можно рассчитать по формуле
–19
U 2 ш q 4kTRf .
где q является сложной функцией протекающего тока, частоты, материала и т.д., т. е.
коэффициент q показывает, настолько шум в непроволочном резисторе больше, чем в
проволочном.
Величина шума непроволочного резистора очень сильно меняется от частоты. Наибольший
шум лежит в диапазоне частот от 5 до 1000 Гц. Поэтому в чувствительных усилителях следует
применять высококачественные проволочные резисторы.
Интенсивность токового шума может отражать скрытые процессы (микропробои, локальные
перегревы), происходящие внутри резистора, и дефекты, которые могут привести резистор к
негодности. По этой причине важен контроль резисторов. Доброкачественные углеродистые и
металлопленочные резисторы имеют уровень шумов около 5 мкВ/В (микровольты шума на Вольт
приложенного к резистору напряжения), а у недоброкачественных она возрастает в десятки раз.
В связи с этим в чувствительных усилителях и других схемах с малым уровнем шумов
необходимо применять углеродистые, металлооксидные и металлопленочные резисторы.
В области частот ниже 1 кГц шумы начинают отступать от закона, рассмотренного выше.
Закон поведения шума, который называют избыточным, низкочастотным или фликкер-шумом,
установлен чисто эмпирически:
I 2 ш изб AI 2
1
f .
Попытка описать этот шум математически вызвала затруднение. Фликкер-шум наблюдается в
пленочных резисторах, полупроводниках, электронных лампах и т. д.
Шумы транзисторов
В транзисторном усилительном каскаде основным источником шумов являются транзисторы,
шумы которых превосходят величину шумов других элементов схемы.
Источниками шумов в транзисторе являются:
1. электронно-дырочные переходы;
2. активные составляющие областей базы, эмиттера коллектора;
3. случайные перераспределения тока между коллектором и базой;
4. неоднородности полупроводникового материала.
Согласно теории шумовых свойств транзисторов, основную роль в транзисторах играют
фликкер-шум, дробовой, тепловой шумы, шумы разделения и т. д. Рассмотрим эти шумы
подробнее, предполагая, что транзистор работает в режиме малого сигнала.
В транзисторах фликкер-шум наблюдается на низких частотах (менее 1 кГц). Спектральная
плотность мощности этого шума пропорциональна 1/fa.
Источником низкочастотных шумов в транзисторе являются носители электрического заряда,
возбужденные в объеме р-n перехода и на его поверхности под действием температуры
приложенного электрического поля, а также в результате соударения нейтральных атомов
полупроводника или примесей с управляемым потоком основных носителей. Количество
носителей, возбужденных за данный промежуток времени, является случайным, а созданный ими
ток — флуктуационным.
Величина низкочастотного шума может быть определена по формуле:
I ш2 изб K
I2
f ,
fa
где K — постоянная, зависящая от объема полупроводника.
Так как площадь коллекторного перехода обычно намного больше площади эмиттерного
перехода, низкочастотный шум в основном проявляется в коллекторном переходе и его можно
учесть с помощью генератора шумового тока:
U G
f
I ш2 изб K k k f A
f
f
где коэффициенты γ, δ и α зависят от используемого полупроводника (γ=1,2…1,8; δ =1…2,
α=0,9…1,2), Gк — проводимость коллекторного перехода постоянному току. 0бычно фликкер-шум
возникает в результате плохо обработанных поверхностей кристалла и в местах омических
контактов вывода и кристалла. Шлифованный кристалл имеет меньший фликкер-шум, чем при
травлении его поверхности.
Для снижения этого шума необходимо уменьшить плотность тока на единицу поверхности,
использовать планарные транзисторы и транзисторы с высокой степенью технологической
обработки поверхности. Кроме того, в схемах усилителей целесообразно использовать
транзисторы р–n–p типа, имеющие уровень низкочастотного шума, меньший, чем транзисторы n–
р–n типа.
В ряде случаев специальные измерения фликкер-шума на частоте f=1 кГц и ниже позволяют
прогнозировать надежность транзисторов и определять ряд дефектов в них (плохие контакты,
трещины и т. д.).
Тепловой шум транзистора вызван хаотическим движением носителей в объеме
полупроводника. Этот шум, в отличие от избыточного шума, существует даже при отсутствии
электрического тока. Определяется он по известной формуле Найквиста.
Так как в транзисторе распределенное активное сопротивление области базы больше
распределенного сопротивления областей эмиттера и коллектора, то учитывают только тепловой
шум базы:
U Т2б 4kTrб f .
Величина rб в Ge транзисторах меньше, чем в Si, поэтому последние имеют более высокие
тепловые шумы.
Дискретная структура эмиттерного тока и случайный характер прохождения носителей через
эмиттерный переход являются причиной появления дробового шума. Дробовые шумы возникают
как в коллекторном так и в эмиттерном переходах.
Интенсивность дробовых шумов эмиттерного перехода определяется по формуле Шоттки:
iдр2 э 2q I э f
где Iэ — постоянная составляющая тока через переход, являющегося причиной шумов.
Дробовой шум коллекторного перехода определяется неуправляемым обратным коллекторным
током Iко:
iдр2
2qI ко f
к
Для снижения дробовых шумов рекомендуется использовать транзисторы с малым обратным
током Iко, а также работать при сравнительно невысоких температурах и небольших токах
эмиттера.
Случайный характер процессов рекомбинации носителей в области базы транзистора является
причиной появления шума связанного с перераспределения тока эмиттера
i р2 2q (1 ) I э f
где α — коэффициент передачи по току в схеме с ОБ, Iэ — постоянная составляющая тока
эмиттера.
Существуют и другие типы шумов в транзисторах — это шумы облучения, возникающие при
облучении транзистора быстрыми частицами, шумы лавинного пробоя, возникающие при
высоком, близком к пробивному уровню обратного напряжения на переходе, взрывные шумы и т.
д. Однако в транзисторе основными шумами являются избыточные — тепловой, дробовой и шумы
разделения.
Коэффициент шума транзисторных усилителей
Шумовые свойства транзисторных усилителей принято оценивать величиной коэффициента
шума. Под коэффициентом шума понимают отношение полной мощности шумов в нагрузке к той
части полной мощности, которая обусловлена тепловыми шумами внутреннего сопротивления
источника сигнала Pш гн:
F
Pш полн
Pш гн
Pш тр Pш гн
Pш гн
где Pш тр — мощность шума в нагрузке, обусловленная собственными шумами транзистора.
В таком определении идеальный «нешумящий» усилительный каскад имеет коэффициент
шума, равный единице.
Определим значение коэффициента шума для схемы с ОЭ, для чего введем в эквивалентную
схему усилительного каскада основные шумовые генераторы тока и напряжения. В эквивалентной
схеме, представленной на рис. 3.1, а, шумящее активное внутреннее сопротивление источника
сигнала заменено в соответствии со следствиями из теоремы Найквиста нешумящим
сопротивлением Rг и э.д.с. тепловых шумов
I 2 изб
Iэ
U 2 ТБ
Rг
I2р
r бmax
rк
rэ
U 2 ТГ
Iкэ
а)
I 2 др к
Rн
I 2 др э
U 2ТГ .
IЭ
r
IЭ
rбmax
бmax
rк
rк
Rг
rэ
Iкэ
Rг
Rн
Iкэ
Rн
Iкр
Uтг
Uтг
бmax)
в)
Рис. 2.13. Эквивалентная схема транзистора -—а; эквивалентные схемы для определения составляющих
коллекторного тока — б, в
Аналогично распределенное сопротивление области базы заменено нешумящим
2
сопротивлением rб, и э.д.с. равной U ТБ . Генератор тока i р , подключенный параллельно
дифференциальному сопротивлению эмиттерного перехода rэ, отражает шумы перераспределения
тока эмиттера.
Дробовые шумы и избыточный шум в эквивалентной схеме отражены соответственно
2
2
i 2 др к , i 2 изб .
генераторами i др э ,
Будем считать для простоты сопротивление нагрузки Rн идеальным, т. е. не обладающим
собственными шумами. Тогда, учитывая, что Pн=I2Rн, получим:
k
i
F 1
2
j
н
j 2
i12 н .
Здесь i1 — составляющая коллекторного тока, пропорциональная э.д.с. Uтг, a ij —
составляющие тока Iк, пропорциональные э.д.с. Uтб и токам других генераторов шумового тока,
показанных на рис. 2.13, а.
Определим составляющие тока Iк в нагрузке, для чего в силу линейности системы применим
принцип суперпозиции. Найдем сначала составляющую теплового тока внутреннего
сопротивления генератора, используя эквивалентную схему, изображенную на рис. 2.13, б.
Согласно принципу суперпозиции при rк»rrб и rк»rrэ:
I Э I э I э ,
U тг
I э
Rг rб rэ — составляющая тока эмиттера, вызванная действием генератора U ,
где
тг
Rг rб
I э I э
I э
Rг rб rэ
— составляющая тока эмиттера, связанная с источником Iэ,
Rг rб
Rг rб rэ — коэффициент токораспределения, показывающий какая доля тока
ответвляется в цепь эмиттера.
Записанные выражения для токов I э и I э позволяют определить ток Iэ, а затем и ток αIэ.
Последний полностью протекает в цепи нагрузки и, следовательно, является искомой
составляющей i1н. Средний квадрат этого тока в нагрузке равен:
2
2
1н
i
U 2ТГ
2
1 ( Rг rб rэ ) .
Аналогично для теплового тока базы в нагрузке, поскольку э.д.с.
последовательно с э.д.с. U
2
2
2
ТГ
, получаем:
U ТБ
iт2 б н
2
1 ( Rг rб rэ ) .
U 2 ТБ
включена
Составляющую коллекторного тока Iк, вызванную действием тока Iр, можно определить
аналогично составляющей i1н, воспользовавшись эквивалентной схемой, изображенной на рис. 3.1,
в.
Среднеквадратичное значение этого тока имеет вид:
2
2
i р
i р2 н
1
.
Так как генератор тока
i 2 др э подключен к зажимам эмиттер-коллектор, т.е. параллельно R ,
н
то:
i 2 др э н i 2 др э .
Используя принцип суперпозиции (аналогично тому как при нахождении тока i1н), получим:
2
2
iдр к
i 2 др к н
1
,
2
2
2
iизб
н
1 iизб
.
Подставим полученные выражения в уравнение для коэффициента шума.
2
2
2
2
2
2
2
U 2 ТБ
2
i i др э
iдр к
iизб
1 ( Rг rб rэ ) 2 1 р
1
1
F 1
2
2
U ТГ
2
1 ( Rг rб rэ )
2
1
2
2
Rг rб iдр2 к Rг rб 2 iизб2
U 2ТБ Rг rб i р
i 2 др э
2
U 2 ТГ
U 2 ТГ
U 2 ТГ
U 2ТГ
U 2 ТГ
2
1 ( Rг rб rэ )
2
2
rб Rг rб 2q (1 ) I э f
2q I э f
R r 2qI ко f
г б
2
Rг
4kTRг f
4kTRг f
4kTRг f
2
1 ( Rг rб rэ )
Rг rб 2 A f
2
r
R
r
I
A
f
э
1 б г б (1 ) I э
I к0
2
1
4kTRг f
Rг
2 T Rг
2q f
1
1
После преобразований, с учетом того, что rэ«rrб и β»»r1, получим:
F 1
rб ( Rг rб ) 2
A
I КО (1 ) I э
Rг
2 T Rг
2q f 1
Уравнение для F позволяет определить частотную характеристику коэффициента шума.
Подъем на нижних частотах объясняется возрастанием избыточного шума с понижением частоты
(см. последний член в уравнении для F). Для большинства транзисторов на частотах в несколько
килогерц и выше этим шумом по сравнению с другими можно пренебречь. В области частот от
единиц кГц до десятков МГц коэффициент шума F остается постоянным, что объясняется
преобладанием тепловых и дробовых шумов, являющихся, как известно, белым шумом. На более
высоких частотах f≈fт увеличение F объясняется уменьшением коэффициентом усиления по
току |α|.α|α|..
Продифференцировав выражение для коэффициента шума по Rг и приравняв производную к
нулю, можно найти оптимальное значение Rг, при котором шумы минимальны.
Rг опт rб 1
2 T / rб
I ко (1 ) I э А / 2qf 1
.
Если выполняется условие А/2qf «r (1-)Iэ, то
Rг опт rб 1
2rэ
(1 )rб
.
Зависимость коэффициента шума от величины Rг имеет неявный минимум, что видно из
выражения для коэффициента шума.
4. ГЕНЕРАТОРЫ СИНУСОИДАЛЬНЫХ КОЛЕБАНИЙ
Колебания
синусоидальной формы являются
одним из наиболее
распространенных в радиоэлектронике видом колебаний. Существует много
устройств на различных активных элементах для генерации таких колебаний.
Генераторами называются электронные схемы, формирующие переменное
напряжение требуемой формы. Сначала в этой главе будут рассмотрены генераторы
синусоидальных сигналов, а затем генераторы сигналов специальной формы, в
частности генераторы треугольного и прямоугольного напряжения.
4.1. УСЛОВИЯ ВОЗБУЖДЕНИЯ
Рис. 4.1. Блок-схема генератора
На рис. 4.1 показана блок-схема генератора. Усилитель усиливает входной
сигнал в А раз. При этом между выходным U2 и входным U1 напряжениями усилителя возникает паразитный фазовый сдвиг . К выходу усилителя подключены
нагрузочное сопротивление Rv и схема частотно-зависимой обратной связи, которая
может представлять собой, например, колебательный контур. При этом,
напряжение, используемое для осуществления обратной связи, составляет U 3 = кU2.
Обозначим фазовый сдвиг между напряжениями U3 и U 2 символом .
Для того
чтобы определить, будет ли схема с замкнутой обратной связью генерировать
переменное напряжение, нагрузим выход схемы обратной связи разомкнутого
генератора на резистор с сопротивлением Rе, которое равно входному сопротивлению усилителя, и оценим величину выходного напряжения U3 при подаче на
вход усилителя переменного напряжения U1. Условием генерации замкнутой
схемы является равенство выходного напряжения схемы обратной связи и входного
напряжения усилителя. Это условие записывается следующим образом:
U1=U3=kAU1
Коэффициент петлевого усиления должен, таким образом, равняться
g = к А = 1.
(4.1)
Из этого соотношения следуют два условия:
\g\ = \к\ * \А\ = 1,
(4.2)
+ = 0; 2л, ....
(4.3)
Соотношение (4.2) называется условием баланса амплитуд. Оно заключается в
том, что схема генератора может возбуждаться только тогда, когда усилитель
компенсирует потери в схеме обратной связи. Соотношение (4.3) называется
условием баланса фаз. Оно означает, что колебания в замкнутой системе могут
возбуждаться только тогда, когда фаза выходного напряжения схемы обратной
связи и фаза входного напряжения усилителя совпадают, т.е. обратная связь
является положительной.
1
Широкополосность цепи ОС является характерным признаком всех генераторов
импульсов, причем во всех случаях на частоте > 0 выполняется условие g < 1. В
противном случае устройство превратится в триггер. Это условие свидетельствует о
наличии накопителя энергии, уменьшающего петлевое усиление на низких или
инфранизких частотах до уровня, при котором невозможно появление устойчивого
состояния.
Генераторы синусоидального напряжения отличаются тем, что у них цепь
обратной связи имеет резонансные свойства. Поэтому условия возникновения
колебаний выполняются только на одной частоте, а не в полосе частот, как у
генераторов импульсов. В качестве резонаторов, обеспечивающих получение
резонансных свойств, используют LC-контуры, RC-цепи цепи определенного вида,
кварцевые резонаторы, электромеханические колебательные системы и др.
Различают «мягкий» и «жесткий» режимы возбуждения генераторов. При
мягком режиме петлевое усиление больше единицы (\g\>1) в момент включения
напряжения питания. Тогда любые шумы или возмущения в системе, вызванные
случайными факторами, усиливаются и через цепь обратной связи подаются на вход
усилителя в фазе, совпадающей с фазой входного сигнала, причем величина этого
дополнительного сигнала больше того возмущения, которое вызвало его появление.
Соответственно увеличится выходное напряжение, что приведет к дальнейшему
увеличению входного сигнала и т. д. В итоге случайно возникшее возмущение
приведет к непрерывному нарастанию выходного сигнала, которое достигло бы
бесконечного большого значения, если бы это было возможно. Однако при
определенном уровне сигнала начинают проявляться нелинейные свойства
электронного усилителя. Коэффициент усиления начинает уменьшаться с
увеличением значения сигнала в системе. При выполнении условия g = 1 амплитуда
автоколебаний стабилизируется и автогенератор начинает давать колебания,
имеющие постоянную амплитуду.
Рис. 4.2. «Жесткий» режим возникновения автоколебаний.
Жесткий режим возбуждения отличается от рассмотренного тем, что при нем
для возникновения автоколебаний необходимо приложить к устройству
дополнительный внешний сигнал, не меньший определенного
значения.
Это
связано с особенностями нелинейности усилительного устройства. В момент
включения напряжения питания и отсутствия автоколебаний g < 1. Поэтому они
сами собой возникнуть не могут. Коэффициент усиления зависит от амплитуды
выходного сигнала. Поэтому если на вход усилителя подать дополнительный
2
электрический сигнал, то при определенном его значении начнет выполняться
условие g > 1. При этом возникнут автоколебания, амплитуда которых будет
нарастать и примет стационарное значение при g = 1. Процесс возникновения
колебаний поясняет рис. 4.2. При приложении входного сигнала, большего UвхА,
например UBXl, он усиливается до напряжения, определяемого точкой 1, и снова
подается на вход. Входное напряжение станет равным UBx2. Выходное напряжение
будет определяться точками 2—6 и т. д. Процесс увеличения амплитуды
прекратится при достижении выходным сигналом значения Uуст (точка 6, в которой
g=1). Если каким-либо путем амплитуду выходного сигнала уменьшить до
значения, меньшего UвхА, то автоколебания прекратятся.
На практике активные приборы в автогенераторах часто работают с отсечкой
тока. Поэтому подход, основанный на использовании теории обратной связи,
обычно применяют для пояснения физической картины процессов. Анализ и расчет
автогенераторов проводят другими методами, в основе которых лежит баланс
энергий, рассеиваемых в устройстве и отбираемых от источника питания.
4.2. Генераторы LC-типа. типа.
Эти генераторы имеют сравнительно высокую стабильность частоты колебаний,
устойчиво работают при значительных изменениях параметров транзисторов, обеспечивают получение колебаний, имеющих малый коэффициент гармоник. К
недостаткам
их
относятся
трудности
изготовления
высокостабильных
температурно-независимых индуктивностей, а также высокая стоимость и
громоздкость последних. Особенно это проявляется при создании автогенераторов
диапазона инфранизких частот, в которых даже при применении ферромагнитных
сердечников габаритные размеры, масса и стоимость получаются большими.
В генераторе LC-цепи типа формы выходного напряжения весьма близка к
гармонической. Это обусловлено хорошими фильтрующими свойствами
колебательного LC-контура. Они, как правило, работают с «отсечкой» тока
активных приборов усилителя. Соответственно форма выходного тока усилителя
резко отличается от синусоидальной. При этом в начальный момент возникновения
автоколебаний |g|»1, что обеспечивает устойчивую работу автогенератора даже при
значительных изменениях параметров его элементов. Для самовозбуждения
генератора LC-типа также необходимо наличие положительной обратной связи.
Сущность самовозбуждения заключается в следующем. При включении
источника питания конденсатор колебательного контура, включенного чаще всего в
коллекторную цепь транзистора, заряжается. В контуре возникают затухающие
автоколебания, причем часть тока (напряжения) этих колебаний подается на
управляющие электроды активного прибора, образуя положительную обратную
связь. Это приводит к пополнению энергии LC-контура. Автоколебания
превращаются
в незатухающие. Частота автоколебаний в первом приближении
определяется резонансной частотой LC-цепи контура:
Многочисленные схемы автогенераторов LC-типа различаются в основном
схемами введения сигнала обратной связи и способами подключения к усилителю
3
колебательного контура.
На рис. 4.3, а показано введение положительной ОС с помощью
трансформаторной обратной связи (обмотка 2). Напряжение ОС зависит от
соотношения числа витков обмоток 1 и 2. На рис. 4.3, б использована
автотрансформаторная обратная связь. Источник питания Е подключен к части
витков катушки индуктивности L, что уменьшает его шунтирующее действие и
повышает
добротность
колебательного
контура
LCV.
Сопротивление
разделительного конденсатора С2 на частоте колебаний близко к нулю. На рис. 4.3, в
показан генератор, собранный по схеме емкостной трехточки. В нем напряжение
обратной связи снимается с конденсатора С2. Энергия, поддерживающая
автоколебания, вводится в форме импульсов тока / э. Для уменьшения
шунтирующего действия транзистора он подключен к контуру через емкостный
делитель напряжения.
Рис. 4.3. LC- автогенераторы:
а – с трансформаторной ОС; б – с автотрансформаторной ОС; в – с емкостной
трехточкой.
Для количественной оценки устойчивости автоколебаний часто вводят
коэффициент регенарации. Это безразмерный коэффициент, характеризующий
режим работы автогенератора и показывающий, во сколько раз можно уменьшить
добротность Q колебательной системы по сравнению с ее исходным значением,
чтобы автогенератор оказался на границе срыва колебаний:
где XL — реактивное сопротивление индуктивности контура; R—эквивалентное
активное сопротивление контура, включающее и сопротивление активного
элемента, шунтирующего его. В низкочастотных автогенераторах коэффициент
регенерации обычно не менее 1,5—3.
Следует отметить, что в транзисторных генераторах источник возбуждающих
колебаний имеет, как правило, малое внутреннее сопротивление. Следовательно, в
цепи базы протекает ток несинусоидальной формы, а напряжение база — эмиттер
остается синусоидальным.
4
Рис. 4.4. Форма коллекторного тока и генерируемого автогенератором сигнала
Хорошие энергетические показатели у генератора могут быть получены только
при работе с «отсечкой тока» (ток через транзистор имеет форму импульсов; рис.
4.4, а). При этом считается, что наилучшие энергетические характеристики имеют
место при угле отсечки 50о-70°. В то же время для возникновения автоколебаний
необходимо, чтобы угол отсечки составлял 90°. В противном случае до
возникновения автоколебаний на базе транзистора будет только запирающее
напряжение и без воздействия дополнительного внешнего отпирающего напряжения
(«жесткий» режим возбуждения) автоколебания не возникнут.
При «мягком» режиме возбуждения на базу должно быть подано отпирающее
напряжение порядка 0,3—0,5 В. При возникновении автоколебаний смещение
должно автоматически изменяться в зависимости от амплитуды колебаний до
получения нужного угла отсечки. Здесь нетрудно увидеть взаимосвязь с
рассмотренным выше положением о необходимости введения цепи, изменяющей
смещение до получения |g| = 1.
При достаточно глубокой ОС и неправильно подобранных емкостях
конденсаторов Сэ, Сб (рис. 4.3, а) может возникнуть прерывистая генерация или
автомодуляция. В этом случае амплитуда колебаний имеет переменное значение или
уменьшается до нуля на определенные промежутки времени (рис. 4.3, б).
Прерывистая генерация обусловлена тем, что при определенных условиях
напряжение автоматического смещения вследствие зарядки конденсаторов С б, Сэ и
Сэ может приблизиться к амплитуде напряжения ОС. Транзистор перестанет
открываться и пополнять энергию колебательного контура. В итоге автоколебания
быстро затухнут до нуля и возникнут снова только после разрядки конденсаторов С 6
и Сэ. Затем процесс нарастания амплитуды, зарядки конденсаторов и срыва
автоколебаний повторится. Поэтому цепи, обеспечивающие
4.3. АВТОГЕНЕРАТОРЫ ТИПА RС
Применение генераторов с колебательными контурами (типа LC) для
генерирования колебаний с частотами меньше 15—20 кГц затруднено и неудобно
из-за громоздкости контуров. В настоящее время для этих целей широко
используются генераторы типа RC, в которых вместо колебательного контура
применяются избирательные RС-фильтры. Генераторы типа RC могут генерировать
весьма стабильные синусоидальные колебания в сравнительно широком диапазоне
частот от долей герца до сотен килогерц. Кроме того, они имеют малые габариты и
массу. Наиболее полно преимущества генераторов типа RC проявляются в области
5
низких частот.
Структурная схема генератора синусоидальных колебаний типа RC приведена
на рис. 4.5.
Рис. 4.5. Структурная схема RC-генератора
Усилитель строится по обычной резистивной схеме. Для самовозбуждения
усилителя, т. е. для превращения первоначально возникших колебаний в
незатухающие, необходимо на вход усилителя подавать часть выходного
напряжения, превышающую входное напряжение или равную ему по величине и
совпадающую с ним по фазе, иными словами, охватить усилитель положительной
обратной связью достаточной глубины. При непосредственном соединении выхода
усилителя с его входом происходит самовозбуждение, однако форма генерируемых
колебаний будет резко отличаться от синусоидальной, поскольку условия
самовозбуждения будут одновременно выполняться для колебаний многих частот.
Для получения синусоидальных колебаний необходимо, чтобы эти условия
выполнялись только на одной определенной частоте и резко нарушались на всех
других частотах.
Рис. 4.6. Трехзвенные фазовращающие цепочки:
а – типа «R-параллель»; б – типа «C-параллель»
Эта задача решается с помощью фазовращающей цепочки, которая имеет
несколько звеньев RC и служит для поворота фазы выходного напряжения
усилителя на 180°. Изменение фазы зависит от числа звеньев п и равно
В связи с тем что одно звено RC изменяет фазу на угол < 90°, минимальное число
звеньев фазовращающей цепочки п — 3. В практических схемах генераторов обычно
используют трехзвенные фазовращающие цепочки.
На рис. 4.6 изображены два варианта таких цепочек, получивших название
соответственно «R-параллель» и «С-параллель». Частота генерируемых
синусоидальных колебаний для этих схем при условии R1 = R2 = R3 = R и Ct =
6
С2 = С3 = С рассчитывается по следующим формулам: для схемы на рис. 4.6, а:
для схемы на рис. 4.6, б:
Для обеспечения баланса амплитуд коэффициент усиления усилителя должен
быть равен затуханию, вносимому фазовращающей цепочкой, через которую
напряжение с выхода поступает на вход усилителя, или превышать его.
Расчеты показывают, что для приведенных схем затухание
Следовательно, схемы с использованием трехзвенных фазовращающих цепочек,
имеющих одинаковые звенья, могут генерировать синусоидальные колебания с
частотой f0 лишь в том случае, если коэффициент усиления усилителя превышает
29.
В фазовращающей цепи с одинаковыми звеньями каждое последующее звено
оказывает шунтирующее действие на предыдущее. Для уменьшения шунтирующего
действия звеньев и снижения затухания в фазовращающей цепи обратной связи
могут применяться так называемые прогрессивные цепочки. В этом случае
сопротивление резистора каждого последующего звена выбирается в tn раз больше
сопротивления предыдущего звена, а емкости последующих звеньев во столько же
раз уменьшаются:
Обычно величина т не превышает 4—5.
На рис. 4.7 приведена одна из возможных схем автогенератора типа RC с
фазовращающей цепочкой.
С точки зрения обеспечения условия баланса фаз такой генератор можно было
бы построить и на одном транзисторе (Т2) с общим эмиттером. Однако в этом
случае цепочка обратной связи шунтирует резистор RK усилительного транзистора и
снижает его усиление, а малое входное сопротивление транзистора резко
увеличивает затухание в цепи обратной связи. Поэтому целесообразно разделить
выход фазовращающей цепи и вход усилителя с помощью эмиттерного
повторителя, собранного на транзисторе Т1.
Работа автогенератора начинается в момент включения источника питания.
Возникающий при этом импульс коллекторного тока содержит широкий и
непрерывный спектр частот, обязательно включающий в себя и необходимую
частоту генерации. Благодаря выполнению условий самовозбуждения колебания
этой частоты становятся незатухающими, тогда как колебания всех других частот,
для которых условие баланса фаз не выполняется, быстро затухают.
Автогенераторы с фазовращающими цепями обычно применяются для генерации
7
синусоидальных колебаний фиксированной частоты. Это связано с трудностью
перестройки частоты в широком диапазоне. Диапазонные автогенераторы типа RC
строятся несколько иначе. Рассмотрим этот вопрос более подробно.
Если усилитель поворачивает фазу входного сигнала на 2 (например,
усилитель, имеющий четное число каскадов), то при охвате положительной
обратной связью достаточной глубины он может генерировать электрические колебания без включения специальной фазовращающей цепочки. Для выделения
требуемой частоты синусоидальных колебаний из всего спектра частот,
генерируемых такой схемой, необходимо обеспечить выполнение условий самовозбуждения только для одной частоты. С этой целью в цепь обратной связи может
быть включена последовательно-параллельная избирательная цепочка, схема
которой приведена на рис. 4.8.
Рис. 4.7. RC-генератор
Рис. 4.8. Последовательно-параллельной
с фазовращающей цепью
избирательная цепочка
обратной связи
Определим свойства этой цепочки, рассматривая ее как делитель напряжения.
Между выходным и входным напряжениями существует очевидная зависимость
Коэффициент передачи напряжения этой цепью
На квазирезонансной частоте w0 коэффициент передачи напряжения должен
быть равен действительному числу. Это возможно лишь в том случае, если
сопротивления, выраженные соответствующей математической записью в числителе
и знаменателе последней формулы, будут иметь одинаковый характер. Данное
условие обеспечивается лишь в том случае,
если действительная
часть
знаменателя равна нулю, т. е.
Отсюда частота квазирезонанса
8
Что же касается коэффициента передачи напряжения, то на квазирезонансной
частоте он равен
Подставляя в эту формулу значение 0, получим
Считая R1 = R2 = R и C1 = С2 = С, найдем окончательные значения f0 и 0;
Затухание,
вносимое
рассматриваемой
квазирезонансной частоте, равно
избирательной
цепочкой
на
Это означает, что минимальный коэффициент усиления, при котором
удовлетворяется условие баланса амплитуд, также должен быть равен 3. Очевидно,
что это требование выполнить достаточно легко. Реальный транзисторный
усилитель, имеющий два каскада (наименьшее четное число), позволяет получить
усиление по напряжению, намного превышающее Ко = 3. Поэтому целесообразно
наряду с положительной обратной связью ввести в усилитель отрицательную
обратную связь, которая, снижая коэффициент усиления, в то же время существенно
уменьшает возможные нелинейные искажения генерируемых колебаний.
Принципиальная схема такого генератора приведена на рис. 4.9.
4.9. Схема транзисторного RC-генератора с перестройкой частоты
9
Терморезистор в цепи эмиттера транзистора Т1 предназначен для стабилизации
амплитуды выходного напряжения при изменении температуры. Регулировка
частоты осуществляется с помощью спаренного потенциометра R1R2.
В настоящее время дискретные элементы (транзисторы) достаточно редко
используются для постоения генераторов. Чаще всего для этих целей применяют
различные типы интегральных микросхем. Схемы, построенные на ОУ,
перемножителях, компараторах и таймерах, отличаются простотой, стабильностью
параметров, универсальностью. Гибкость и универсальность ОУ позволяют с
минимальным количеством внешних компонентов создавать простые, но в то же
время удобные при настройке и регулировке генераторы практически всех типов с
удовлетворительными параметрами.
Принцип работы таких генераторов основан на использовании в цепях ОС
фазосдвигающих или резонансных элементов: моста Вина, двойного Т-образного
моста, сдвигающих RС-цепей. Существуют и другие способы генерирования
синусоидальных колебаний, например фильтрацией импульсов треугольной формы
или выделением первой гармонической составляющей прямоугольных импульсов.
4.3.1. Стабилизация амплитуды выходного напряжения генератора.
Для того чтобы амплитуда сигналов на выходе генератора синусоидальных
колебаний оставалась постоянной, необходима строго регулируемая ОС. Однако в
ряде случаев это значительно усложняет схему генератора. Обычно для
стабилизация амплитуды выходного сигнала генератора применяются нелинейные
элементы: диоды, стабилитроны, лампочки накаливания, терморезисторы, полевые
транзисторы и др.
В таблице 4.1. приведены схемы
основные характеристики некоторых
распространенных типов генераторов.
Табл. 4.1.
10
Один из наиболее простых способов стабилизации показан на рис. 4.10.
Рис. 4.10. Стабилизация амплитуды выходного напряжения генератора
терморезистором.
Он заключается о использовании делителя напряжения, включенного в цепь
положительной ОС ОУ в состоящего из постоянного резистора R4 и терморезистора
RТ с отрицательным
температурным коэффициентом сопротивления.
Терморезистор стабилизирует цепь ОС если выходная амплитуда возрастает,
сопротивление терморезистора падает и обратная связь уменьшается и наоборот.
Резисторы R1 и R2 в цепи ОС предотвращают искажение выходного сигнала, не
позволяя амплитуде возрастать слишком сильно. В результате уровень выходного
сигнала остается постоянным даже при изменении частоты генерации и замене
элементов R3 или С.
Величина напряжения питания Un может изменяться от 5 до 18 В. Амплитуда
выходного сигнала задается величиной R2; во избежание искажений она должна
быть значительно меньше Uп. Частота генерации в схеме с указанными номиналами
компонентов равна 2 кГц.
Другой метод стабилизации амплитуды выходного напряжения генератора
синусоидальных сигналов с применением в цепи ОС светодиодов представлен на
рис. 4.11. Для нормальной работы этого генератора с мостом Вина нужно, чтобы
коэффициент усиления ОУ был равен 3 при требуемом уровне выходного сигнала. В
дополнительной цепи ОС желательно использовать низкоомные резисторы R5 и R6,
что позволит пропускать значительный ток (до 5 мА) через светодиоды. При этом
диоды будут находиться в оптимальном режиме.
11
Рис. 4.11. Генератор с АРУ
на светодиодах
Рис. 4.12. Генератор с АРУ
на основе диодного моста
Рассмотренная схема обеспечивает нелинейные искажения выходного
синусоидального напряжения на уровне 1%. Резистор R5 может быть использован
для регулировки амплитуды выходного сигнала в пределах ±5—10 B. Выходная
частота генерируемого сигнала определяется элементами моста Вина и при
указанных номиналах равна 400 Гц. Изменяя эти элементы моста Вина, можно
управлять частотой генератора в диапазоне, ограниченном лишь шириной полосы и
скоростью нарастания выходного напряжения используемого ОУ. Для достижения
стабильной работы генератора желательно применять высококачественные
элементы в мосте Вина.
На рис. 4.12 показана схема, основанная, как и предыдущая, на мосте Вина, с тем
лишь отличием, что АРУ в эюй схеме осуществляется диодным мостом и
стабилитроном в цепи отрицательной ОС ОУ.
При наличии АРУ в такой схеме первоначальное значение коэффициента
усиления по петле отрицательной ОС устанавливается несколько выше
необходимого для обеспечения запуска генератора. Впоследствии цепь АРУ,
включаясь, снижает усиление и предотвращает дальнейшее повышение амплитуды
выходного напряжения, которое без АРУ ограничивается лишь при насыщении
усилителя, что приводит к большим искажениям. Пo этой же причине
первоначальное превышение коэффициента усиления ОУ по сравнению с
требуемым для нормальной работы генератора значением (в данном случае равное
3) не должно быть значительным.
Рис. 4.13. Генератор с АРУ на полевом транзисторе
12
Амплитуда выходного сигнала определяется пороговым напряжением
стабилитрона. Коэффициент нелинейных искажений генератора при правильном
подборе резисторов и стабилитрона не превышает 0,5%.
В схеме на рис. 4.13 в качестве нелинейного элемента, обеспечивающего АРУ,
использован ПТ. Этот генератор состоит из пикового детектора и ПТ, который
работает в режиме управляемого напряжения резистора и включен в двойную цепь с
регенеративной ОС.
В этой схеме выходной синусоидальный сигнал детектируется пиковым
детектором и результирующее напряжение в виде постоянного потенциала,
изменяющегося с изменением амплитуды на выходе, подается на затвор ПТ.
Уровень этого управляющего напряжения подбирается потенциометром 5 кОм так,
чтобы при изменении сопротивления канала транзистора автоматически
выполнялось условие генерации и повышалась стабильность работы схемы при
любых амплитудах выходного напряжения.
При указанных на рисунке номиналах элементов схема генерирует синусоидальные Колебания частотой 1460 Гц и амплитудой 5 В в нагрузке сопротивлением 1 кОм Изменение напряжения источника питания от ±8 до ±18 В
практически не оказывает влияния на параметры выходного сигнала. В
температурном диапазоне 0—65° С амплитуда колебаний изменяется на 6% и
частота на 1,5%. Для генерирования сигнала другой частоты необходимо изменить
соответствующий образом номиналы резисторов и конденсаторов в двойном Тобразном мосте
Разновидность схемы генератора со стабилизацией амплитуды с помощью ПТ и
использованием в цепи положительной ОС моста Вина, приведена на рис. 4.14.
Выходное напряжение генератора выпрямляется, фильтруется и подается, в виде
управляющего сигнала на затвор ПТ. До тех пор пока амплитуда выходного
напряжения меньше порога открывания, стабилитрона, напряжение затвор — исток
ПТ равно нулю, и последний эквивалентен низкоомному резистору. Коэффициент
передачи ОУ, определяемый цепью отрицательней ОС, в этом случае равен
максимально возможному значению. Поэтому амплитуда выходного напряжения
будет увеличиваться до тех пор, пока не откроется стабилитрон, который формирует
управляющий сигнал, вызывающий запирание ПТ, т. е. повышение сопротивления
сток—исток и соответственно увеличение глубины отрицательной ОС. При
некотором значении выходного напряжения полное усиление в цепях ОС генератора
станет равным единице, что приведет к стабилизации амплитуды Uвых.
Рис. 4.14. Генератор на мосте
Вина с АРУ
Рис. 4.15. Стабилизация частоты
кварцевым резонатором
13
В связи с тем, что цепь АРУ управляет усилением при любых амплитудах
выходного сигнала, разброс сопротивлений резисторов в петле отрицательной ОС
практически не оказывает влияния на работу схемы. Однако следует отметить, что в
течение периода выходного напряжения возможны некоторые изменения
коэффициента усиления в схеме за счет конечного значения времени разряда
фильтрующего конденсатора С1 через резистор R2. Поэтому в каждом конкретном
случае необходимо выбирать постоянную времени R2C1, исходя из требуемого
уровня стабилизации амплитуды выходного напряжения генератора н приемлемого
значения времени передачи сигнала по цепи APУ. Схема генератора такого типа
обеспечивает уровень искажений синусоидального напряжения не хуже 0,2%
4.3.2. Стабилизация частоты выходного напряжения генератора.
Рассмотренные
схемы
генераторов
синусоидальных
колебаний
имеют
фиксированную частоту выходных сигналов, задаваемую RС-элементами в цепях
ОС. Стабильность частоты колебаний, генерируемых такими схемами, в большей
степени зависит от качества этих элементов, чем от структуры фазосдвигающей
цепи и характеристик ОУ. Поэтому при использовании высококачественных RС-цепи элементов приведенные выше схемы обычно удовлетворяют требованиям,
предъявляемым к генераторам синусоидальных колебаний в части стабильности
частоты выходного сигнала.
Однако в некоторых устройствах, например в эталонных генераторах,
применяемых в прецизионных радиотехнических и измерительных системах,
требуется дополнительная стабилизация частоты, которая обычно осуществляется с
помощью кварцевого кристалла, включаемого в цепь положительной ОС генератора
рис. 4.15.
Высокая
избирательность
кристалла
в значительной
степени
стабилизирует резонансное значение частоты генерации, задаваемое цепью положительной ОС. В этой схеме элементы R и С предназначены в основном для
фильтрации высших гармонических составляющих сигнала и выбираются с учетом
резонансного импеданса кристалла. При резонансе кристалл обеспечивает фазовый
сдвиг, равный нулю, т. е импеданс представляет собой активное сопротивление.
Это сопротивление заменяет один из резисторов в цели положительной ОС ОУ. Для
того чтобы выполнить условие согласования резонансной частоты кристалла и
частоты моста Вина, величину резистора R подбирают равной резонансному
сопротивлению кристалла, а значение емкости конденсаторов С определяют из
выражения RC = 1/(2fвыx).
Цепь АРУ, подключенная к инвертирующему входу ОУ, компенсирует
изменения резонансного сопротивления кристалла с температурой, поддерживая тем
самым амплитуду и частоту выходных сигналов постоянной. Однако при больших
изменениях температуры для лучшей стабилизации параметров выходного
напряжения генератора в цепь положительной ОС последовательно с кварцевый
кристаллом следует включить добавочный резистор не большого номинала. В этом
случае величина резистора R должка быть равна сумме значений добавочного
резистора и резонансного сопротивления кристалла.
14
Рис. 4.16. Регулировка амплитуды
выходного сигнала генератора
в пределах 0 – 10 В
Рис. 4.17. Регулировка амплитуды
выходного сигнала генератора
резистором в цепи АРУ
4.3.3. Регулировка амплитуды выходного напряжения.
Схема генератора синусоидальных колебаний, амплитуда которых может
регулироваться потенциометром Rр приведена на рис. 4.16. Частота генераций
определяется элементами моста Вина и равна 400 Гц. Цепь АРУ на ПТ обеспечивает
стабилизацию амплитуды генерируемых сигналов на уровне 10 В.
Такой метод изменения величины выходного напряжения может быть
использован в любой из рассмотренных выше схем генераторов синусоидальных
сигналов. Однако при таком включении потенциометра стабильность работы
генератора и линейность регулировки величины напряжения на его выходе
существенно зависят от значения входного импеданса схемы, на которую нагружен
данный генератор
В схеме генератора на рис 4.17 амплитуда выходного напряжения регулируется
потенциометром R7, который изменяет порог включения цепи АРУ, построенной на
основе кремниевого диода Д. Когда прямое падение напряжения на диоде достигает
нескольких сотен милливольт, диод открывается и уменьшает коэффициент
усиления ОУ, стабилизируя тем самым амплитуду выходного сигнала на уровне,
определяемом положением движка потенциометра R7.
Настройка схемы осуществляется следующим образом. Перемещением движка
потенциометра R7 диод Д подключается к выходу генератора Затем подбирается
значение подстроечного резистора R4, при котором возникает генерация. В этих
условиях размах амплитуды выходного сигнала схемы должен быть равен 300 мВ.
Если это выполняется, то при перемещении движка потенциометра R7 в другое
крайнее положение размах напряжения на выходе генератора будет изменяться от
500 мВ до 9 В; при этом искажения формы синусоидальных колебаний
незначительны. При указанных на рисунке номиналах схема генерирует колебания
частотой 1 кГц.
Общим недостатком рассмотренных в этом разделе схем является то, что в них
при регулировке амплитуды выходного напряжения существенно изменяются
нелинейные искажения генерируемых сигналов и в определенных режимах они
могут достигать нескольких процентов. Поэтому для построения прецизионных
генераторов колебаний с регулируемой амплитудой следует выбрать усилители с
управляемым коэффициентом усиления на выходе стабилизированного по
амплитуде генератора. В качестве такого генератора можно использовать любой
15
рассмотренный в этом разделе.
4.3.4. Регулировка частоты генератора.
Чаще всего перестраиваемые по частоте генераторы строятся на основе моста
Вина со стабилизируемой амплитудой, как показано на рис 4.18.
Рис. 4.18. Генератор с регулировкой
частоты сдвоенным резистором
Рис. 4.19. Генератор колебаний
с частотой 20 Гц – 20 кГц
Изменение частоты генерации в схеме осуществляется с помощью спаренных
резисторов R2 и R3 величиной 10 кОм. Чтобы амплитуда колебаний оставалась
постоянной во всем диапазоне частот, на инвертирующем входе ОУ включен
потенциальный делитель, сформированный резистором R5 и лампочкой
накаливания, имеющей номинальное значение рабочего напряжения в. пределах 12
— 28 В и ток потребления не выше 50 мА. При настройке схемы величину
резистора R5 подбирают так, чтобы напряжение на выходе ОУ было равно 2,5 В. В
этих условиях искажения выходного синусоидального сигнала генератора не
превышают 0,1%. а ток, потребляемый схемой от источников питания, равен 6 мА
С номиналами элементов, указанными на рисунке, схема имеет диапазон
рабочих частот 150 Гц—1,5 кГц. При необходимости этот диапазон может быть
сдвинут изменением номиналов конденсаторов С1 и С2. Однако максимальная
частота генерации ограничена конечной скоростью нарастания выходного
напряжении ОУ и для ОУ типа 140УД7 обычно не превышает 25 кГц (при
допустимом уровне искажений выходного сигнала)
Генератор синусоидального напряжения с регулируемой частотой может быть
построен также по принципу фильтрации по первой гармонике прямоугольных
импульсов (табл 4.1) При этом метоле сигнал на выходе генератора будет
стабильным по амплитуде, так как стабилизация амплитуды прямоугольного
напряжения осуществляется ограничителем. Поэтому, используя генератор
прямоугольных импульсов с ограничителем, можно упростить схему генератора
синусоидальных колебаний с регулируемой частотой за счет отсутствия петли АРУ,
необходимой для схем с мостом Вина. Поэтому такой генератор быстро запускается,
и амплитуда напряжения на его выходе устанавливается за несколько периодов
колебаний.
На рис. 4.19 представлена схема генератора, в которой перестройка частоты
осуществляется одним потенциометром R3. В схеме ОУ1 типа 153УД2 используется
в режиме активного фильтра, а компаратор ОУ2 типа 521САЗ является генератором
прямоугольного напряжения. Частота сигналов зависит от значений элементов R1,
16
R3, С1 и С2 (табл. 4.2) Если выбрать номиналы конденсаторов С1 и С2
одинаковыми, то частота генерируемых колебаний определится из выражения
f = 1/(2С1 R1R3)
В табл. 4.3 приведены значения номиналов конденсаторов, позволяющие
получить различные частотные диапазоны.
Табл. 4.2.
Табл. 4.3.
В рассмотренной схеме уровень нелинейных искажений изменяется от 0,75 до
2%, в зависимости от значения резистора R3. Увеличение номинала этого резистора
выше 1 кОм приведет к недопустимым искажениям, а уменьшение ниже 50 Ом — к
автогенерации схемы фильтра. Получить частоты свыше 20 кГц от таких
генераторов затруднительно, так как на более высоких частотах падает добротность
фильтра, и на выходе появляются импульсы клинообразной формы. Нижняя частота
генератора ограничивается лишь емкостью конденсаторов. Для усилителя ОУ1 в
схеме использована компенсация с опережением, расширяющая полосу усиления
свыше 1 МГц и увеличивающая скорость нарастания выходного напряжения до 10
В/мкс. При стандартной схеме компенсации максимальная частота, на которой имеет место полный размах амплитуды сигнала, ограничена на уровне 6 кГц. Для
повышения температурной стабильности схемы следует правильно выбирать типы
применяемых резисторов и конденсаторов.
Используя коммутаторы на МДП-транзисторах, можно построить генератор
синусоидальных колебаний с фиксированным набором частот. Схема такого
генератора на основе моста Вина изображена на рис. 4.20. Выходная частота
задается одним из подключаемых с помощью коммутатора моста Вина
в
соответствии с табл. 5.3.
Выбор частоты f1 .., f4 производится при помощи напряжения отрицательной
полярности величиной — 9 В, подаваемого на один из входов схемы.
Управление частотой такого генератора может осуществляться с выхода
логических схем. Если необходимо, последовательность изменения выходной
частоты может быть запрограммирована программно-временным устройством,
управляющим МДП-транзисторами. Диапазон генерируемых частот легко изменить
дополнительными частотозадающими цепями и коммутаторами.
17
Рис. 4.20. Генератор с цифровым управлением частотой
4.3.5. Квадратурные генераторы.
В тех случаях, когда необходимо получить два вида колебаний, сдвинутых на 90°
друг относительно друга (синусоидальные и косинусоидальные колебания), можно
использовать схему, изображенную на рис. 4.21. Усилитель ОУ1 включен по схеме
активного фильтра низких частот с двумя полюсами. Усилитель ОУ2 работает в
режиме интегратора. Поскольку фазовый сдвиг на отставание, вносимый обоими
каскадами, составляет 270о, схема может возбудиться при достаточно большом
коэффициенте усиления и при сдвиге фаз меньше 180о. Существующий в схеме
запас коэффициента усиления обеспечивает устойчивое возбуждение генератора.
Стабилизация размаха амплитуды выходного сигнала осуществляется включением в
схему генератора ограничивающих стабилитронов Д1и Д2. Наличие диодов
приводит к возникновению нелинейных искажений синусоидального сигнала,
однако влияние последних уменьшается при использовании фильтров,
пропускающих низкие частоты. Если диоды Д1 и Д2 имеют одинаковые пороговые
напряжения, то в результате симметричного ограничения сигнала практически
исключаются искажения в виде четных гармоник. Поэтому основной помехой будет
третья гармоника, причем ее уровень составляет — 40 дБ от уровня полезной первой
гармоники на выходе усилителя OУ 1 и — 50 дБ на выводе ОУ2. Это означает, что
гармонические искажения синусоидального и косинусоидального сигналов не
превышают 1 и 0,3% соответственно.
Рис. 4.21. Квадратурный генератор на двух ОУ
Частота генерации и порог возбуждения схемы определяются выбором
номиналов прецизионных элементов R1—R3 и С1—СЗ, которые должны иметь
малые разбросы и температурные коэффициенты. Номинал резистора R3 можно
18
выбрать меньшим, чем указано на рис. 4.21; при этом допускается использовать
другие элементы с большим разбросом без существенного ухудшения условий
возбуждения. Номинал резистора R4 не критичен, но следует учитывать, что он
должен быть значительно меньше номинала резистора R2, чтобы падение
напряжения на резисторе R4 было незначительным, когда ограничивающие диоды
открыты. С указанными номиналами элементов схема генерирует колебания
частотой 1 Гц Заменив элементы, задающие частоту выходных сигналов, можно
расширить рабочий диапазон частот схемы до 1 кГц.
Рис. 4.22. Квадратурный генератор с регулируемой частотой колебаний
Более совершенная схема квадратурного оператора с использованием
перемножителей напряжения для управления цепью ОС показана на рис. 4.22. В
этой схеме имеется возможность регулировки частоты синусоидальных и
косинусоидальных сигналов с помощью управляющего напряжения Uупр.
При изменении управляющего напряжения меняется частота колебаний в
соответствии с выражением f = Uупр/20RC) Следует отметить, что в приведенной
схеме генератора наблюдается некоторая зависимость амплитуды выходных
сигналов от частоты Поэтому для ликвидации этой зависимости необходимо
дополнить схему одной из рассмотренных выше цепей АРУ.
Схему такого генератора с регулируемой частотой удобно использовать в
качестве частотного или амплитудно-частотного модулятора. Диапазон изменения
рабочих частот генератора определяется перемножителями и равен 100.
.
19
3. Искажения, вносимые усилителем
От электронных усилителей требуется неискаженное усиление сигналов. Но по ряду
причин в усилителе неизбежно возникают искажения, вследствие чего форма усиленного
сигнала в той или иной степени отличается от формы сигнала на входе усилителя.
Практически искажения не должны превышать допустимую величину. Существует ряд
причин, вызывающих искажения разных видов.
Искаже́ния сигна́ла — изменение сигнала, вызванное несовпадением идеальных и
реальных характеристик системы его обработки и передачи.
Различают линейные и нелинейные искажения. Линейными искажениями называются
такие, которые вносит усилитель, работающий в режиме малого сигнала, т.е. в линейном
режиме. Нелинейные искажения возникают при работе усилителя в режиме большого
сигнала, когда проявляются нелинейные зависимости между напряжениями и токами в его
цепях.
Линейные искажения в установившемся режиме проявляются в виде частотных
искажений. Линейные искажения в устанавливающемся режиме проявляются в виде
переходных искажений. Для количественной оценки вносимых усилителем искажений
используют
основные
характеристики
усилителя:
частотную;
переходную;
динамическую. Частотная и переходная характеристики используются для оценки
линейных искажений, а динамическая - для определения нелинейных искажений.
Существенное значение в отношении неискаженного усиления имеют вносимые
усилителем шумы.
3.1. Частотные искажения
Частотные искажения обусловлены частотной зависимостью коэффициента передачи
усилителя, что приводит к изменению соотношений амплитуд и начальных фаз
составляющих частотного спектра сигнала на выходе по сравнению с их соотношениями на
входе усилителя. В результате форма усиливаемого сигнала искажается.
Причиной образования частотных искажений является наличие в схеме усилителя
реактивных элементов (емкостей, индуктивностей), приводящее к зависимости от частоты
напряжений и токов в цепях усилителя.
Частотной характеристикой усилителя называется зависимость его коэффициента
передачи от частоты при постоянстве напряжения на входе, т.е. Кu = F() И KI = F()
при Uвх = const. Больший практический интерес представляют искажения напряжения,
поскольку режим работы элементов нагрузки усилителя определяется обычно напряжением,
а не током. Имея это в виду, опустим индексы коэффициента передачи, указывающие на его
принадлежность к напряжению.
Частотная характеристика строится в прямоугольной системе координат, по
вертикальной оси в линейном масштабе откладывают К в абсолютных или логарифмических
единицах, а по горизонтальной оси - частоту f в герцах или угловую частоту со = 2f в
логарифмическом масштабе. Необходимость применения логарифмического масштаба по
оси частот вызывается широким частотным диапазоном современных усилителей.
Типичная амплитудно-частотная характеристика усилителя приведена на рис. 3.1.
1
Рис. 3.1. Амплитудно-частотная характеристика усилителя
На рис.1.4 КН, КВ и К0 - значения коэффициента усиления на низшей, высшей и средней
частотах диапазона (под средней частотой f0 подразумевается частота наибольшего
усиления, обычно близкая к fНfВ ). Идеальная АЧХ усилителя, соответствующая отсутствию
вносимых усилителем искажений, представляет собой прямую, параллельную оси абсцисс.
При отклонении реальной характеристики от идеальной возникают частотные искажения.
Как видно из рисунка 3.1, в области средних частот (с.ч.) реальная характеристика совпадает
с идеальной, что и свидетельствует об отсутствии искажений в этой области.
На основании характеристики, изображенной на рис. 3.1, могут быть определены
амплитудно-частотные искажения. Количественная оценка этих искажений может
производиться посредством коэффициента частотных искажений
M=K0/K
где К - коэффициент усиления на частоте (КН или КВ), для которой определяются
искажения. В частных случаях для частот fH и fB
MН=K0/KН
MВ=K0/KВ
Чаще для оценки частотных искажений, вносимых усилителем, пользуются
относительным или нормированным усилением у = 1/М. Очевидно, что у = K/K0
ун=KН/K0 yB=KВ/K0.
Изменение усиления, определяемое коэффициентами М и у, может быть выражено в
логарифмических единицах. Эта величина, называемая неравномерностью усиления,
находится как
Y = 20 lg y = -20 lg M (дБ).
Очевидно, что для идеальной АЧХ на всех частотах диапазона М = 1,у=1 илиY = 0.
Рассмотрим схему усилительного каскада при включении транзистора с общим
эмиттером (ОЭ), рис. 3.2.
2
Рис. 3.2. Усилительный каскад с ОЭ
Для того, чтобы яснее представлять себе работу каскада ОЭ на разных частотах
диапазона, проанализируем схемы замещения этого каскада в области средних, низших и
высших частот. Эти схемы представлены на рис. 3.3.
Схема замещения в области низших частот (рис. 3.3. б) приведена без учета влияния
цепи CЭRЭ, так как емкостное сопротивление конденсатора С Э на всех частотах, вплоть до
самой низкой, во много раз больше сопротивления RЭ. В то же время влиянием емкости С С
пренебречь нельзя, так как по мере уменьшения частоты ее емкостное сопротивление XС =1/
СС увеличивается и падение напряжения на нем также возрастает, что приводит к уменьшению напряжения на нагрузке RH и спаду частотной характеристики, обусловленному
перераспределением напряжений между 1/СС и RH. На схеме замещения в области высших
частот (рис. 3.3, в) отсутствует емкость Сс, так как в этой области частот ее емкостное
сопротивление ничтожно мало и им можно пренебречь, но параллельно RH оказывается подключенной емкость С0, включающая в себя емкость коллекторного р-n перехода СК и
емкость монтажа СМ. По мере увеличения частоты ее емкостное сопротивление1/С0
уменьшается и начинает шунтировать сопротивление нагрузки, в результате общее
эквивалентное сопротивление уменьшается, что и приводит к уменьшению напряжения на
выходе и спаду АЧХ в области верхних частот.
В области средних частот, как это видно из схемы рис. 3.3, а, отсутствуют реактивные
элементы, то есть, нет частотно-зависимых сопротивлений, чем и обусловлена неизменность
усиления на этих частотах.
Рис. 3.3. Схемы замещения усилительного каскада ОЭ:
а) в области средних частот; б) в области низших частот;
в) в области высших частот
3.2. Фазочастотные искажения
На рис. 3.4 проиллюстрированы фазочастотные искажения. Входной сигнал (кривая 3)
состоит из двух гармонических составляющих 1 и 2, причем вторая гармоника отстает от
первой на /2 (рис. 3.4, а). В процессе усиления изменилось фазовое соотношение между
гармоническими составляющими, и вторая гармоника стала совпадать по фазе с первой, в
результате форма кривой сигнала на выходе (рис. 3.4, б) изменилась (кривая 3).
Фазовый сдвиг между выходным и входным напряжениями усилителя равен
алгебраической сумме фазовых сдвигов, создаваемых отдельными каскадами
= ф1+ф2 + ф3+... .
3
Рис. 3.4. Изменение формы сигнала, обусловленное фазочастотными искажениями
Это свойство вытекает их того положения, что коэффициент передачи усилителя равен
произведению коэффициентов передачи отдельных каскадов
При постоянном значении коэффициента усиления форма кривой сигнала не искажается,
если фазовый угол изменяется прямо пропорционально частоте, т.е.
=af,
где а - любое постоянное число, включая нуль.
Это уравнение и является уравнением идеальной фазовой характеристики.
Действительно, если на входе усилителя поддерживается напряжение
то напряжение на выходе будет изменяться по закону:
т.е.
Последнее равенство показывает, что независимо от частоты выходное напряжение
опережает входное при а > 0 или отстает от него при а < 0 на некоторое время фазового
пробега
, при этом взаимное расположение синусоид различных частот, а,
следовательно, и форма кривой не подвергается изменению.
Так как напряжение на выходе не может возникнуть раньше, чем на входе, то при
существовании зависимости ф = af, всегда а меньше либоравно 0. Следовательно, если К =
const, то единственной причиной линейных искажений импульсных сигналов является
отступление от уравнения идеальной фазовой характеристики.
Фазовой характеристикой называют зависимость угла сдвига фазы ф между выходным и
входным напряжением от частоты, т.е. зависимость аргумента относительного усиления от
4
частоты. При построении фазовой характеристики масштаб обеих осей берут обычно
линейным. Положительные значения ф, откладываемые вверх по вертикальной оси, соответствуют опережению входного напряжения выходным, отрицательные, откладываемые вниз,
- отставанию выходного напряжения от входного.
Так как идеальной фазовой характеристикой усилителя, соответствующей отсутствию
вносимых усилителем фазовых искажений, является прямая, проходящая через начало
координат под любым углом к горизонтальной оси, то и вносимые усилителем фазовые
искажения оцениваются не абсолютным значением угла сдвига фазы ф, вносимого
усилителем, а разностью ординат, ф фазовой характеристики и касательной к ней, проведенной через начало координат. Из графика рис. 3.5, а видно, что в области низких частот
проходящая через начало координат касательная к фазовой характеристике совпадает с
горизонтальной осью, и поэтому мерой искажений на низких частотах является абсолютное
значение вносимого усилителем угла сдвига фазы ф Н, т.е. фН = фН. В области верхних
частот фазовые искажения фВ значительно меньше вносимого усилителем угла сдвига фазы
фВ (рис. 3.5, б).
Рис. 3.5. Фазочастотная характеристика в области нижних и верхних частот
Иногда бывает удобно пользоваться амплитудно-фазовой характеристикой,
связывающей в одну зависимость изменения коэффициента усиления К = F1(f) и фазового
сдвига ф = F2(f), происходящие при изменении f от 0 до . Амплитудно-фазовая
характеристика К = F(ф) строится в полярной системе координат (рис. 3.6) посредством векторов, абсолютные значения которых равны К, а углы наклона по отношению к оси начала
отсчетов (положительное направление оси абсцисс) равны ф. При этом частотная
характеристика коэффициента передачи
представляет собой геометрическое место точек концов вектора К,
имеющего начало в точке 0 и определенного для различных частот (f1, f2, fo, f3,. …). На рис.). На рис.
3.6 fo - средняя частота, коэффициент усиления на которой, равен Ко.
Как видно из рис. 3.6,
, с другой стороны, относительное усиление
т.е.
5
,
Рис. 3.6. Амплитудно-фазовая характеристика
Последнее выражение устанавливает связь между амплитудно- и фазочастотной
характеристиками для рассматриваемого случая и показывает, что при изменении
относительного усиления у от 1 до 0 (для апериодических каскадов усиления у не может
быть больше единицы), угол изменяется в пределах от 0 до ±/2.
3.3. Переходные искажения
Переходные искажения характеризуют изменения формы сигнала, вносимые усилителем
в переходном режиме. Они определяются как отклонения реальной переходной
характеристики усилителя от идеальной. Переходная характеристика представляет собой
зависимость мгновенных значений выходного напряжения, тока или соответствующих коэффициентов усиления от времени при подключении ко входу усилителя стандартного
сигнала, называемого единичной функцией.
Наличие сигнала стандартной формы необходимо для того, чтобы свойства различных
усилителей в переходном режиме рассматривались при одинаковых условиях, что обеспечит
сопоставимость полученных результатов. Этот стандартный сигнал должен быть выбран с
таким расчетом, чтобы наилучшим образом выявить искажения формы сигнала, вносимые
усилителем в переходном режиме (переходные искажения). Таким сигналом и является
единичная функция 1(t), представляющая собой мгновенный единичный перепад
напряжения (или тока) на входе усилителя (рис. 3.7, а).
Очевидно, что при совмещении момента перепада с началом координат для всех
значений t < 0 l(t) = 0, а для всех значений t > 0 l(t) = 1. На рис. 3.7, б изображена идеальная
переходная характеристика в области малых времен. Эта характеристика имеет ту же форму
мгновенного перепада, что и входной сигнал, и отличается от него только увеличенной амплитудой перепада Ko-l(t), где Ко - установившееся значение коэффициента усиления
идеального усилителя, а также сдвигом момента перепада на величину фазовой постоянной
Тф в направлении запаздывания. Поскольку форма сигнала на выходе усилителя в
рассмотренном идеальном случае остается неизменной, переходные искажения отсутствуют.
Рис. 3.7. Стандартный сигнал (а) и идеальная переходная характеристика усилителя для
области малых времен (б)
Переходная характеристика реального усилителя отличается от идеальной, так как
наличие в схеме усилителя реактивных элементов и соответственно внутренних запасов
энергии (энергия электрического поля емкостей, магнитного поля индуктивностей)
6
приводит к постепенному переходу от прежнего энергетического состояния к новому,
вызываемому действием рассматриваемого стандартного сигнала. Вследствие этого происходит также постепенное изменение переходного коэффициента усиления.
Так как обычно время нарастания переднего фронта tФ и время образования спада Ti
отличаются очень значительно, то для показа фронта и плоской вершины переходной
характеристики приходится использовать два отдельных графика с масштабами времени,
отличающимися на несколько порядков. В связи с этим целесообразно разбить переходную
характеристику на два участка: участок малых времен или передний фронт переходной
характеристики, и участок больших времен или ее плоскую часть (вершину).
Реальная переходная характеристика в области малых времен может быть
апериодической (рис. 3.8, кривая а) или в случае, если на переходный процесс
накладываются резонансные явления, может иметь периодический (колебательный)
характер (рис. 3.8, кривая б).
В обоих случаях при t—» переходный коэффициент усиления K(t)—»Ко, где Ко установившееся значение коэффициента усиления. Практически K(t) оказывается близким к
Ко уже в конце участка малых времен.
В целях обобщения часто используют нормированную переходную характеристику,
представляющую собой зависимость
Здесь х = t/ обобщенное время, причем является постоянной времени цепи,
определяющей форму переходной характеристики.
Рис. 3.8. Переходная характеристика в области малых времен
На рис. 3.9 приведены нормированные переходные характеристики для участка малых
времен и для случаев апериодического (кривая а) и колебательного (кривая б)
устанавливающегося процесса. Очевидно, что в обоих случаях относительная величина
переходного коэффициента усиления y(t) стремится к единице.
Искажения переднего фронта оцениваются длительностью фронта tФ (называемой
также временем установления). В случае колебательного устанавливающегося процесса они
характеризуются также относительными величинами выбросов HВ1, НВ2,... и впадин HВП1,
НВП2,... . Поскольку полная длительность фронта (соответствующая нарастанию y(t) от 0 до
1) теоретически равна бесконечности, величину tФ принято определять для изменения y(t) в
пределах от d до 1-d, где d равно 0,1 или 0,05. Определение длительности фронта показано
на рис. 3.9 (tФа для апериодической переходной характеристики а и tФб для колебательной
переходной характеристики б). Там же показаны относительные величины первого
(наибольшего) выброса HВ1 = ymax-l и первой (наибольшей) впадины HВП1 = 1-уmin для
характеристики б. Величины HВ1 и HВП1 выражают обычно в процентах.
7
Рис. 3.8. Нормированная переходная характеристика для участка малых времен
На рис. 3.9 изображена нормированная переходная характеристика для участка больших
времен (плоская часть характеристики), построенная для участка времени, имеющего
порядок интересующей нас длительности импульса и превышающего представленный на
рис. 3.8 передний фронт в сотни и более раз.
Рис. 3.9. Нормированная переходная характеристика для участка больших времен
Искажения плоской части характеристики измеряют относительными величинами
подъема П = ymax-l и спада С = 1-уmin. Здесь ymax и уmin наибольшее и наименьшее значения
в пределах плоской части характеристики.
Переходные искажения оказывают влияние на качество воспроизведения звуковых
передач. Поэтому для высококачественных усилителей звуковых частот, помимо частотных,
регламентируют также и переходные искажения. Величина tф для этих усилителей не
должна превышать 5...15мкс. Однако наиболее существенное значение переходные искажения имеют для импульсных усилителей, в том числе для усилителей видеосигналов. Так, при
слишком большой длительности фронта tф в телевизионном изображении размываются
мелкие детали, стираются резкие границы яркости, понижается также четкость работы
импульсных устройств других назначений. Обычно необходимо стремиться, чтобы
tФ < (0,01.. .0,l)Tumin, где Tumin - минимальная длительность усиливаемого импульса, что по
абсолютной величине может составлять десятки или даже единицы наносекунд.
При больших значениях выбросов и впадин в телевизионном изображении происходит
подчеркивание мелких деталей, образуются светлые и темные полосы (окантовка) вдоль
8
контуров изображения. Поэтому в видеоусилителях необходимо выдерживать HВ1 < 5%.
Переходные искажения так же, как и частотные, определяются при малых уровнях
входного сигнала, соответствующих линейной области работы усилителя. Причиной
переходных искажений в области малых времен для усилителя, изображенного на рис. 3.2,
является наличие емкости Со, а в области больших времен — емкости СС.
3.4. Связь между переходной и частотной характеристиками
Из сказанного выше следует, что и частотные и переходные искажения представляют
собой линейные искажения, вызываемые одной и той же причиной (наличие в схеме
усилителя реактивных элементов), но одни (частотные) проявляются в установившемся
режиме, а другие — в устанавливающемся или переходном режиме работы усилителя.
Из теории электрических цепей известно, что связь между временной и частотной
характеристиками линейной цепи устанавливается посредством интеграла Фурье и имеет в
символической форме записи вид:
или
в зависимости от того, какая из характеристик является заданной и какая — искомой.
Здесь f(t) - непериодическая функция времени, описывающая переходный процесс в
рассматриваемой цепи, F()- соответствующая спектральная функция.
Спектральная функция F() непериодической функции времени f(t) является, как
известно, сплошной (непрерывной) и представляет собой частотную зависимость
комплексной амплитуды бесконечно малого участка спектра шириной d около частоты .
Если под непериодической функцией времени f(t) понимать переходную характеристику
усилителя, то частотный спектр F() должен соответствовать подведению ко входу
усилителя единичной функции и учитывать искажающее воздействие на нее исследуемого
усилителя.
Другими словами, необходимо, чтобы частотный спектр
где F1() - частотный спектр единичной функции, a F2() - частотная характеристика
усилителя, определяемая его коэффициентом передачи К().
Известно, что
Следовательно, можно записать выражение
определяющее зависимость между переходной f(t) и частотной К() характеристиками
усилителя.
Приведенная связь между характеристиками позволяет определить поведение усилителя
в переходном режиме, если известна его частотная характеристика. Может быть показано,
что крутизна переднего фронта переходной характеристики возрастает (уменьшение tФ) по
мере расширения полосы равномерно усиливаемых высоких частот, а протяженность плоской части этой характеристики, ограничиваемая допустимой величиной спада С,
возрастает по мере расширения полосы равномерно усиливаемых низких частот диапазона.
Другими словами, чем лучше частотная характеристика усилителя, тем более совершенной
является его переходная характеристика.
Из сказанного следует, что анализ и расчет усилителя могут производиться как
9
частотным, так и временным методом. В случае применения частотного метода целью
расчета является получение требуемого усиления в заданном диапазоне частот при
допустимых частотных искажениях. При использовании временного метода целью расчета
является получение требуемого усиления при допустимых переходных искажениях
(длительность фронта, выбросы, подъем и спад плоской части характеристики).
В принципе оба метода равноценны. Однако очевидно, что при расчете усилителей
непрерывных колебаний (аналоговых сигналов), работа которых частично или полностью
относится к установившемуся режиму, удобнее пользоваться частотным методом, в то время
как при расчете усилителей, сигналы которых представляют собой последовательность ряда
кратковременных непериодических импульсов, удобнее применять временной метод. В
случае необходимости всегда может быть осуществим переход от одного метода
исследования к другому.
3.5. Нелинейные искажения
Нелинейные искажения вызваны нелинейностью системы обработки и передачи сигнала.
Эти искажения вызывают появление в частотном спектре выходного сигнала составляющих,
отсутствующих во входном сигнале. Нелинейные искажения представляют собой изменения
формы колебаний, проходящих через электрическую цепь (например, через усилитель или
трансформатор), вызванные нарушениями пропорциональности между мгновенными
значениями напряжения на входе этой цепи и на ее выходе. Это происходит, когда
характеристика выходного напряжения нелинейно зависит от входного. Количественно
нелинейные искажения оцениваются коэффициентом нелинейных искажений или
коэффициентом гармоник. Типовые значения КНИ : 0 % — синусоида; 3 % — форма,
близкая к синусоидальной; 5 % — форма, приближенная к синусоидальной (отклонения
формы уже заметны на глаз); до 21 % — сигнал трапецеидальной или ступенчатой формы;
43 % — сигнал прямоугольной формы.
Особенностью нелинейных искажений является такое искажение формы сигнала, при
котором в его спектре появляются новые частотные составляющие.
Нелинейность усилителя вызывается наличием в нем нелинейных элементов
(транзисторы, лампы, трансформаторы, диоды). Нелинейный элемент содержит нелинейные
параметры (входные сопротивления транзисторов, диодов, динамическая магнитная
проницаемость материала сердечника трансформатора).
Нелинейные искажения оцениваются на основе динамической характеристики,
представляющей собой зависимость между мгновенными значениями токов или напряжений
на выходе и входе усилителя. Динамическая характеристика определяется для больших
пределов изменения сигналов, приводящих к заходу в области нелинейных зависимостей
между напряжениями и токами.
Различают следующие виды динамических характеристик:
1. Выходная динамическая характеристика типа
2.
Входная динамическая характеристика типа
3.
Проходная динамическая характеристика типа
4.
Сквозная динамическая характеристика типа
Здесь i2 и u2 — мгновенные значения токов и напряжений на выходе, i1 и u1 —
мгновенные значения токов и напряжений на входе, e1 — ЭДС источника сигналов на входе
усилителя.
В качестве примера рассмотрим типичную по форме проходную характеристику i2 =
F(u1), используемую часто для расчета нелинейных искажений (рис. 3.10, а).
10
Рис. 3.10. Проходные динамические характеристики: а) реальная, б) идеальная
Динамическая характеристика, соответствующая отсутствию вносимых усилителем
искажений приведена на рис. 3.10, а.
При отклонении динамической характеристики от прямолинейной возникают
нелинейные искажения. Основные нелинейные искажения вносят оконечные и
предоконечные каскады, активные усилительные элементы в которых работают в режиме
большого сигнала.
Методы количественной оценки нелинейных искажений
Величина нелинейных искажений может определяться:
- непосредственно по форме динамической характеристики;
- по спектру образующихся нелинейных искажений (гармоники, комбинационные частоты).
При оценке нелинейных искажений по первому способу, используемому в телевидении,
величина искажений определяется отношением среднего изменения крутизны динамической
характеристики
, происходящего при колебаниях напряжения сигнала в пределах
от u1max до u1min , к исходному значению крутизны при u10, равному tgo, что соответствует
коэффициенту нелинейных искажений
11
Сказанное поясняется рисунком 3.11.
Рис. 3.11. Определение нелинейных искажений по форме динамической характеристики
При оценке нелинейных искажений по второму способу необходимо предположить, что:
а) входной
сигнал
представляет
собой
установившееся
гармоническое
колебание определенной частоты;
б) входной
сигнал
представляет
собой
установившиеся
периодические
колебания сложной формы.
Случаи (а) и (б) существенно отличаются как по характеру образующихся нелинейных
искажений, так и в отношении методики их расчета и измерений.
В случае (а) вследствие нелинейности усилителя, помимо колебаний с частотой сигнала
, на входе образуются колебания гармоник с частотами 2 = 2; З = З и т.д. При этом
величина нелинейных искажений определяется коэффициентом гармоник КГ,
представляющим собой отношение суммарного действующего значения напряжения (или
тока) гармоник к напряжению (или току) основной частоты.
Обычно коэффициент гармоник выражается в процентах таким образом:
или
Очевидно, что значение КГ не изменяется, если вместо действующих значений
напряжений или токов подставить в эти выражения их амплитудные значения. При чисто
активном характере сопротивления нагрузки усилителя коэффициент гармоник, найденный
из выражений по любому из приведенных выше выражений, имеет одно и то же значение,
так как напряжения и токи всех гармоник связаны между собой неизменной величиной
сопротивления. При комплексном характере сопротивления нагрузки значения КГ,
найденные из указанных выражений, получаются различными, и следует использовать то
или иное выражение в зависимости от того, что является в рассматриваемом случае
существенным — нелинейные искажения напряжения или тока.
В любом случае коэффициент гармоник может быть выражен через отношение
суммарной мощности гармоник к мощности основной частоты, т.е.
Допустимая величина коэффициента гармоник для усилителей звуковой частоты в
зависимости от качества соответствующего тракта воспроизведения колеблется в пределах
от 0,1% до (3...5)%. Особенно жесткие требования в отношении нелинейных искажений
предъявляются к усилителям измерительной аппаратуры (КГ порядка сотых и тысячных
долей процента). В телевизионных усилителях нелинейные искажения, приводящие к
12
изменению соотношения яркостей, могут быть значительной величины (КГ = 10.. .15%), не
оказывая существенного влияния на качество изображения. То же относится и к
импульсным усилителям, использующим к тому же в ряде случаев ограничение сигналов по
максимуму.
3.6. Помехи и шумы
Помехи и шумы, образующиеся в цепях усилителя, могут значительно снижать качество
его работы, так как они искажают форму сигналов и обнаруживаются в паузах между
сигналами. Искажение формы сигналов может получиться как за счет непосредственного
наложения напряжения помех и шумов на напряжение сигнала, так и путем модуляции
сигнала шумом в нелинейных цепях усилителя.
Различают следующие виды помех и шумов:
1) тепловые шумы (во входных цепях усилителя);
2) шумы усилительных элементов (флуктуационные, дробовые, полупроводниковые и
др.);
3) шумы контактного и пробойного происхождения;
4) помехи за счет источников питания усилителя (фон);
5) помехи за счет влияния внешних полей;
6) помехи от механических вибраций (микрофонный эффект).
В усилителях с относительно небольшой чувствительностью, имеющих минимальное
входное напряжение сигнала порядка единиц милливольт, снижение относительной
величины помех и шумов до допустимого значения не представляет труда при надлежащем
качестве деталей и монтажа, фильтрации питающих напряжений, экранировании цепей и
деталей, а также амортизации деталей и шасси усилителя.
Однако по мере увеличения чувствительности усилителя трудности обеспечения его
необходимой помехозащищенностью растут. Это относится в особенности к тепловым и
флуктуационным шумам. Причем, очевидно, что определяющими являются тепловые шумы
входных цепей усилителя и шумы первого активного усилительного элемента (транзистора,
лампы), т.е. шумы в звеньях усилителя с наименьшими величинами сигнала. Именно эти
шумы, принципиально неустранимые и допускающие снижение в относительно небольших
пределах, ограничивают увеличение чувствительности усилителей.
Для количественной оценки общей величины шумов усилителя определяют его
относительный уровень шумов
Здесь Uш и Рш - общие величины напряжения и мощности шумов и помех, вызываемых
всеми действующими и перечисленными выше причинами. Uc max и Рс max - максимальное
напряжение и мощность сигнала. Все перечисленные величины относятся к выходу
усилителя.
Для высококачественных усилителей звуковых частот относительный уровень шумов Н ш
не должен превышать (-70)дБ. Такого же порядка должна быть величина Н ш и для
высококачественного телевизионного или измерительного усилителя.
Источники шумов в усилительных каскадах
Шумы резисторов
Шумы представляют собой важную проблему в науке и технике, поскольку они
определяют нижние пределы, как в отношении точности любых измерений, так и в
отношении величин сигналов, которые могут быть обработаны средствами электроники.
Под шумами в усилительных каскадах понимают различные флуктуации амплитуд
протекающих токов, которые накладываются на полезный сигнал и приводят к его
частичному или полному искажению. Флуктуационные шумы обусловлены тепловым
движением электрических зарядов, в первую очередь электронов. Спектр частот
флуктуационных шумов занимает очень широкую полосу от 0 до миллиметровых
13
радиоволн. Источниками флуктуационных шумов являются резисторы и усилительные
элементы. Рассмотрим вначале шумы резисторов.
В соответствии с современными представлениями носителями электрического тока в
проводниках являются электроны, обладающие элементарным электрическим зарядом,
равным 1,6*10–19 Кл.
При отсутствии внешнего поля электроны в металлическом проводнике совершают
хаотическое движение, аналогичное тепловому движению молекул газа или жидкости.
Тепловое возбуждение электронов даже при комнатной температуре настолько велико, что
электроны перемещаются с весьма большими скоростями (около 100 км/с), при этом
величина свободного пробега электронов составляет всего 10-8 м.
Движущийся заряд (электрон) образует элементарный импульс электрического тока.
Таким образом, в объеме проводника появляются элементарные импульсы тока,
длительность которых равна времени свободного пробега. Если к проводнику приложено
внешнее электрическое поле, то на хаотическое движение электронов будет накладываться
упорядоченное смещение их вдоль электрического поля.
Упорядоченное движение в одном направлении называется электрическим током.
Однако воздействие электрического поля на каждый электрон может происходить только на
длине свободного пробега. По этой причине электрическое поле успевает за время между
соударениями изменить скорость теплового движения и энергию электрона в самой
ничтожной степени, хотя именно это изменение и является причиной тока. Таким образом,
протекание тока не оказывает сильного влияния на шумовую э.д.с., связанную с
элементарными импульсами тока.
Следовательно, собственные движения электронов пропорциональны температуре тела и
не будут зависеть от протекающих токов, если последние не будут нагревать проводник.
Таким образом, причиной шума в резисторах являются флуктуации объемной плотности
электрического заряда в проводящем теле резистора, вызванные хаотическим движением
носителей заряда.
Среднеквадратичное значение теплового шума в металлическом резисторе
(Джонсоновский шум) определяется по формуле Найквиста:
U 2 ш 4kTRf .
Здесь Δff — полоса частот, в которой исследуется шум, k — постоянная Больцмана.
Следует заметить, что реактивные элементы не могут генерировать шумы, потому что
они не потребляют активную энергию. Это утверждение не является очевидным, хотя это
именно так. В конденсаторе полный заряд не меняется, следовательно, шумовое напряжение
не меняется. В идеальной катушке также не будет шумового напряжения.
В том случае, когда имеется комплексное сопротивление Z, определив r(f) и x(f), можно
сказать, что шумы на концах комплексного сопротивления будут создаваться только
активной составляющей
f2
U
2
ш
4kT r ( f ) df
f1
.
2
Из формулы Найквиста для U ш следует, что в каком бы частотном диапазоне не
исследовался шум, обусловленный тепловыми флуктуациями, оказывается, что энергия,
приходящая на единицу полосы, одинакова, т. е. спектральная плотность в полосе Δff
одинакова. В силу такого характера спектра этот шум назвали белым шумом.
Дробовой шум. Электрический ток представляет собой движение дискретных зарядов, а
не плавное непрерывное течение. Конечность заряда приводит к статистических
флуктуациям тока, определяемым формулой:
1
I ш эфф I Ш R 2qI f 2
где q=1.610
–19
,
Кл — заряд электрона, f — ширина полосы частот измерения.
14
Относительные флуктуации (дробвой шум) больше для меньших токов. Как и
резистивный шум Джонсона, это Гауссовский белый шум.
Шумы непроволочных резисторов: углеродистых типа ВС, УЛМ, УЛИ, БЛП,
металлизированных типа МЛТ, МЛП, композиционных ТО, КЛМ, КЛВ и пленочных —
нельзя рассчитывать по формуле Найквиста. В зависимости от конструкции и технологии
изготовления они могут оказаться больше теплового шума. При этом наблюдается
зависимость шумов от напряжения, падающего на резисторе, и от силы тока, протекающего
через него.
В действительности проводящие слои непроволочного резистора состоят из большого
числа микроскопически малых проводящих частиц, соприкасающихся друг с другом. При
протекании тока через проводящий слой его проводимость несколько изменяется случайным
образом вследствие нарушения контактов между токопроводящими частицами. Флуктуации
проводимости вызывают случайные колебания тока, которые создают на сопротивлении
напряжения шума. Тепловые шумы непроволочного резистора можно рассчитать по
формуле
U 2 ш q 4kTRf .
где q является сложной функцией протекающего тока, частоты, материала и т.д., т. е.
коэффициент q показывает, настолько шум в непроволочном резисторе больше, чем в
проволочном.
Величина шума непроволочного резистора очень сильно меняется от частоты.
Наибольший шум лежит в диапазоне частот от 5 до 1000 Гц. Поэтому в чувствительных
усилителях следует применять высококачественные проволочные резисторы.
Интенсивность токового шума может отражать скрытые процессы (микропробои,
локальные перегревы), происходящие внутри резистора, и дефекты, которые могут привести
резистор к негодности. По этой причине важен контроль резисторов. Доброкачественные
углеродистые и металлопленочные резисторы имеют уровень шумов около 5 мкВ/В
(микровольты шума на Вольт приложенного к резистору напряжения), а у
недоброкачественных она возрастает в десятки раз. В связи с этим в чувствительных
усилителях и других схемах с малым уровнем шумов необходимо применять углеродистые,
металлооксидные и металлопленочные резисторы.
В области частот ниже 1 кГц шумы начинают отступать от закона, рассмотренного выше.
Закон поведения шума, который называют избыточным, низкочастотным или фликкершумом, установлен чисто эмпирически:
I 2 ш изб AI 2
1
f .
Попытка описать этот шум математически вызвала затруднение. Фликкер-шум
наблюдается в пленочных резисторах, полупроводниках, электронных лампах и т. д.
Шумы транзисторов
В транзисторном усилительном каскаде основным источником шумов являются
транзисторы, шумы которых превосходят величину шумов других элементов схемы.
Источниками шумов в транзисторе являются:
1. электронно-дырочные переходы;
2. активные составляющие областей базы, эмиттера коллектора;
3. случайные перераспределения тока между коллектором и базой;
4. неоднородности полупроводникового материала.
Согласно теории шумовых свойств транзисторов, основную роль в транзисторах играют
фликкер-шум, дробовой, тепловой шумы, шумы разделения и т. д. Рассмотрим эти шумы
подробнее, предполагая, что транзистор работает в режиме малого сигнала.
В транзисторах фликкер-шум наблюдается на низких частотах (менее 1 кГц).
Спектральная плотность мощности этого шума пропорциональна 1/ffa.
Источником низкочастотных шумов в транзисторе являются носители электрического
заряда, возбужденные в объеме р-n перехода и на его поверхности под действием
15
температуры приложенного электрического поля, а также в результате соударения
нейтральных атомов полупроводника или примесей с управляемым потоком основных
носителей. Количество носителей, возбужденных за данный промежуток времени, является
случайным, а созданный ими ток — флуктуационным.
Величина низкочастотного шума может быть определена по формуле:
I ш2 изб K
I2
f ,
fa
где K — постоянная, зависящая от объема полупроводника.
Так как площадь коллекторного перехода обычно намного больше площади эмиттерного
перехода, низкочастотный шум в основном проявляется в коллекторном переходе и его
можно учесть с помощью генератора шумового тока:
U G
f
I ш2 изб K k k f A
f
f
где коэффициенты γ, δ и α зависят от используемого полупроводника (γ=1,2…1,8; δ =1…
2, α=0,9…1,2), Gк — проводимость коллекторного перехода постоянному току. 0бычно
фликкер-шум возникает в результате плохо обработанных поверхностей кристалла и в
местах омических контактов вывода и кристалла. Шлифованный кристалл имеет меньший
фликкер-шум, чем при травлении его поверхности.
Для снижения этого шума необходимо уменьшить плотность тока на единицу
поверхности, использовать планарные транзисторы и транзисторы с высокой степенью
технологической обработки поверхности. Кроме того, в схемах усилителей целесообразно
использовать транзисторы р–n–p типа, имеющие уровень низкочастотного шума, меньший,
чем транзисторы n–р–n типа.
В ряде случаев специальные измерения фликкер-шума на частоте f=1 кГц и ниже
позволяют прогнозировать надежность транзисторов и определять ряд дефектов в них
(плохие контакты, трещины и т. д.).
Тепловой шум транзистора вызван хаотическим движением носителей в объеме
полупроводника. Этот шум, в отличие от избыточного шума, существует даже при
отсутствии электрического тока. Определяется он по известной формуле Найквиста.
Так как в транзисторе распределенное активное сопротивление области базы больше
распределенного сопротивления областей эмиттера и коллектора, то учитывают только
тепловой шум базы:
U Т2б 4kTrб f .
Величина rб в Ge транзисторах меньше, чем в Si, поэтому последние имеют более
высокие тепловые шумы.
Дискретная структура эмиттерного тока и случайный характер прохождения носителей
через эмиттерный переход являются причиной появления дробового шума. Дробовые шумы
возникают как в коллекторном так и в эмиттерном переходах.
Интенсивность дробовых шумов эмиттерного перехода определяется по формуле
Шоттки:
iдр2 э 2q I э f
где Iэ — постоянная составляющая тока через переход, являющегося причиной шумов.
Дробовой шум коллекторного перехода определяется неуправляемым обратным
коллекторным током Iко:
iдр2
к
2qI ко f
Для снижения дробовых шумов рекомендуется использовать транзисторы с малым
обратным током Iко, а также работать при сравнительно невысоких температурах и
небольших токах эмиттера.
Случайный характер процессов рекомбинации носителей в области базы транзистора
является причиной появления шума связанного с перераспределения тока эмиттера
i р2 2q (1 ) I э f
16
где α — коэффициент передачи по току в схеме с ОБ, Iэ — постоянная составляющая
тока эмиттера.
Существуют и другие типы шумов в транзисторах — это шумы облучения, возникающие
при облучении транзистора быстрыми частицами, шумы лавинного пробоя, возникающие
при высоком, близком к пробивному уровню обратного напряжения на переходе, взрывные
шумы и т. д. Однако в транзисторе основными шумами являются избыточные — тепловой,
дробовой и шумы разделения.
Коэффициент шума транзисторных усилителей
Шумовые свойства транзисторных усилителей принято оценивать величиной
коэффициента шума. Под коэффициентом шума понимают отношение полной мощности
шумов в нагрузке к той части полной мощности, которая обусловлена тепловыми шумами
внутреннего сопротивления источника сигнала Pш гн:
F
Pш полн
Pш гн
Pш тр Pш гн
Pш гн
где Pш тр — мощность шума в нагрузке, обусловленная собственными шумами
транзистора.
В таком определении идеальный «нешумящий» усилительный каскад имеет
коэффициент шума, равный единице.
Определим значение коэффициента шума для схемы с ОЭ, для чего введем в
эквивалентную схему усилительного каскада основные шумовые генераторы тока и
напряжения. В эквивалентной схеме, представленной на рис. 3.1, а, шумящее активное
внутреннее сопротивление источника сигнала заменено в соответствии со следствиями из
теоремы Найквиста нешумящим сопротивлением Rг и э.д.с. тепловых шумов
IЭ
I 2 изб
r
Iэ
U 2 ТБ
rб
IЭ
rб
б
rк
rк
rк
Rнг
Rнг
U 2 ТГ
rэ
I 2 др к
rэ
I2р
Iээ
Rнн
I 2 др э
Iээ
Rнг
Iээ
Rнн
Rнн
Iэр
Uтгтг
Uтгтг
б)
а)
U 2ТГ .
в)
Рис. 3.12. Эквивалентная схема транзистора -—а; эквивалентные схемы для определения
составляющих коллекторного тока — б, в
Аналогично распределенное сопротивление области базы заменено нешумящим
2
i р , подключенный
U ТБ . Генератор тока
сопротивлением rб, и э.д.с. равной
параллельно дифференциальному сопротивлению эмиттерного перехода rэ, отражает шумыэ, отражает шумы
перераспределения тока эмиттера.
Дробовые шумы и избыточный шум в эквивалентной схеме отражены соответственно
2
2
i 2 др к , i 2 изб .
генераторами i др э ,
Будем считать для простоты сопротивление нагрузки Rн идеальным, т. е. не обладающим
собственными шумами. Тогда, учитывая, что Pн=I2Rн, получим:
k
i
F 1
2
j
н
j 2
i12 н .
Здесь i1 — составляющая коллекторного тока, пропорциональная э.д.с. Uтг, a ij —
составляющие тока Iк, пропорциональные э.д.с. Uтб и токам других генераторов шумового
тока, показанных на рис. 3.12, а.
Определим составляющие тока Iк в нагрузке, для чего в силу линейности системы
17
применим принцип суперпозиции. Найдем сначала составляющую теплового тока
внутреннего сопротивления генератора, используя эквивалентную схему, изображенную на
рис. 2.13, б. Согласно принципу суперпозиции при rк»rrб и rк»rrэ:
I Э I э I э ,
I э
где
Uтг,
U тг
Rг rб rэ — составляющая тока эмиттера, вызванная действием генератора
Rг rб
I э
Rг rб rэ
— составляющая тока эмиттера, связанная с источником Iэ,
Rг rб
Rг rб rэ — коэффициент токораспределения, показывающий какая доля тока
I э I э
ответвляется в цепь эмиттера.
Записанные выражения для токов I э и I э позволяют определить ток Iэ, а затем и ток
αIэ. Последний полностью протекает в цепи нагрузки и, следовательно, является искомой
составляющей i1н. Средний квадрат этого тока в нагрузке равен:
2
2
1н
i
U 2ТГ
2
1 ( Rг rб rэ ) .
Аналогично для теплового тока базы в нагрузке, поскольку э.д.с.
U 2 ТБ включена
2
последовательно с э.д.с. U ТГ , получаем:
2
U 2ТБ
i
2
1 ( Rг rб rэ ) .
Составляющую коллекторного тока Iк, вызванную действием тока Iр, можно определить
аналогично составляющей i1н, воспользовавшись эквивалентной схемой, изображенной на
рис. 3.12, в.
Среднеквадратичное значение этого тока имеет вид:
2
тбн
2
2
i р
i р2 н
1
.
i 2 др э
Так как генератор тока
параллельно Rн, то:
подключен к зажимам эмиттер-коллектор, т.е.
i 2 др э н i 2 др э .
Используя принцип суперпозиции (аналогично тому как при нахождении тока i1н),
получим:
2
i
2
др к н
2
iдр к
1
,
2
2
изб н
i
2
iизб
1
.
Подставим полученные выражения в уравнение для коэффициента шума.
18
F 1
2
2
2
2
2
2
2
U 2 ТБ
2
i i др э
iдр к
iизб
1 ( Rг rб rэ ) 2 1 р
1
1
2
U 2 ТГ
2
1 ( Rг rб rэ )
2
2
2
Rг rб iдр2 к Rг rб 2 iизб2
U 2ТБ Rг rб i р
i 2 др э
1 2
2
U ТГ
U 2 ТГ
U 2 ТГ
U 2 ТГ
U 2 ТГ
2
1 ( Rг rб rэ )
2
2
r
R r 2q (1 ) I э f
2q I э f
R r 2qI ко f
1 б г б
г б
2
Rг
4kTRг f
4kTRг f
4kTRг f
2
1 ( Rг rб rэ )
Rг rб 2 A f
2
rб Rг rб
I э
A
f
1
I к0
(1 ) I э
2
4kTRг f
Rг
2 T Rг
2q f 1
1
После преобразований, с учетом того, что rэ«rrб и β»»r1, получим:
rб ( Rг rб ) 2
A
I КО (1 ) I э
F 1
Rг
2 T Rг
2q f 1
Уравнение для F позволяет определить частотную характеристику коэффициента шума.
Подъем на нижних частотах объясняется возрастанием избыточного шума с понижением
частоты (см. последний член в уравнении для F). Для большинства транзисторов на частотах
в несколько килогерц и выше этим шумом по сравнению с другими можно пренебречь. В
области частот от единиц кГц до десятков МГц коэффициент шума F остается постоянным,
что объясняется преобладанием тепловых и дробовых шумов, являющихся, как известно,
белым шумом. На более высоких частотах f≈fт увеличение F объясняется уменьшением
коэффициентом усиления по току |α|.α|α|..
Продифференцировав выражение для коэффициента шума по Rг и приравняв
производную к нулю, можно найти оптимальное значение Rг, при котором шумы
минимальны.
Rг опт rб 1
2 T / rб
I ко (1 ) I э А / 2qf 1
.
Если выполняется условие А/f2qf «r (1-)Iэ, то
2rэ
Rг опт rб 1
(1 )rб
.
Зависимость коэффициента шума от величины Rг имеет неявный минимум, что видно из
выражения для коэффициента шума.
3.7. Динамический диапазон
Динамический диапазон характеризует предел изменения напряжения и мощности в
рассматриваемой цепи и измеряется как
Относя максимальные и минимальные значения напряжения и мощности сигнала к их
величинам, принимаемым за начальные (например, к стандартным начальным величинам Р н
= 1мВт и UH = 0,775 эфф.В), получаем, что
19
Таким образом, динамический диапазон может быть определен как разность между
максимальным Асmах и минимальным Асmin значениями уровней напряжения или мощности
сигнала в рассматриваемой цепи.
Существенное значение в отношении работы усилителя имеет естественный
динамический диапазон источника сигналов, т.е. динамический диапазон изменений
напряжения или мощности на входе усилителя. Строго говоря, к усилителю следовало бы
предъявить требование неискаженной работы в пределах всего этого диапазона. Однако
естественный динамический диапазон сигнала в ряде случаев весьма велик. Так, динамический диапазон сигнала при звуковой передаче, определяемый диапазоном изменения
громкостей, составляет для речи до 50 дБ, а для музыки (симфонический оркестр) до 75 дБ.
Динамический диапазон сигнала при телевизионной передаче, определяемый диапазоном
изменения яркостей изображения, составляет примерно 60 дБ.
Неискаженное усиление в пределах динамического диапазона источника сигналов
ограничивается со стороны высоких уровней передачи мощностью и нелинейными
искажениями, а со стороны низких уровней — собственными шумами усилителя.
20
Лекция №4
4.1.6 Схемные особенности аналоговых микросхем и усилителей постоянного тока.
Дифференциальный каскад. Принцип взаимного согласования цепей в аналоговой схемотехнике.
Источники постоянного тока. Каскады сдвига уровня. Токовые зеркала. Операционные усилители.
Общие сведения. Основные схемы включения операционных усилителей (ОУ). Внутренняя
схемотехника ОУ. Схема замещения ОУ. Коррекция частотной характеристики. Параметры, типы
ОУ. Модуляционные усилители.
Мы нашли один интересный способ построения хороших, стабильных усилителей – надо
сделать усилитель с большим коэффициентом усиления (хорошо бы около 1 000 000), а затем
применить отрицательную обратную связь (ООС). И не важно, что большой коэффициент
усиления получается плохим, невоспроизводимым, с неравномерной частотной и фазовой
характеристиками и т.д. Величина ООС задаётся пассивными элементами, например резисторами,
а они обладают хорошей стабильностью.
Давайте посмотрим, как можно сделать усилитель с хорошим коэффициентом усиления. Пусть
это схема с общим эмиттером (ОЭ), использующая п-р-п транзистор.
Здесь мы не ввели никаких лишних деталей, считая, что на входе есть постоянная и переменная
составляющие сигнала, и на выходе мы сумеем выделить нужные составляющие сигналов.
Поэтому у нас есть только резистор R и напряжение питания Еп. Напишем выражение для Uвых:
qU
U вых E п RI к E п RI э E п RI 0 exp( бэ )
kT
Мы написали это выражение в таком виде, чтобы точно увидеть, как оно зависит от
температуры. Но при этом мы будем считать, что при изменении температуры одновременно
изменяется и входной сигнал, так, чтобы на выходе всё оставалось постоянным. Итак, мы считаем,
что Uвых, Еп, R и I0 остаются постоянными (последнее, правда, немного меняется, но гораздо
меньше, чем члены в экспоненте). Поэтому можно полагать, что меняются только Uбэ и Т –
напряжение база-эмиттер и абсолютная температура. (q и k – мировые константы – заряд одного
электрона и постоянная Больцмана.) Продифференцируем по Т и приравняем нулю.
dU
q ( бэ T U бэ )
dT
0
kT 2
Сокращая лишние члены, получим:
dU бэ U бэ
dT
T
На первый взгляд это может быть всё что угодно – какое-то напряжение, делённое на какую-то
температуру.
Но температура эта абсолютная, то есть в градусах Кельвина, и близка к комнатной. Значит,
это примерно 3000К. А напряжение – это примерно контактная разность потенциалов, так как р-п
переход эмиттер-база смещён в прямом направлении. Следовательно, всё зависит от материала:
для кремния это 0,6 , а для германия 0,3 В. Поделив контактную разность потенциалов на
температуру, получим:
1
Материал
Si
Ge
dUбэ/dT, мВ/0К
2
1
Видно, что германий в 2 раза лучше (термостабильнее), чем кремний. Но в современных
условиях кремний гораздо технологичнее (дешевле).
Итак, у кремниевых транзисторов приведённый ко входу температурный дрейф составляет
всего 2 мВ/0К. Чтобы узнать, что будет на выходе, надо это умножить на перепад температуры и
коэффициент усиления. У работающего транзистора перепад температуры вполне может быть 10
0
К, а коэффициент усиления у двух- трёхкаскадного усилителя может быть 1000...100000.
Получается 20...2000 В. Это очень много.
Конечно, можно использовать полевые транзисторы, у них температурный дрейф гораздо
меньше. Но есть несколько способов борьбы с температурным дрейфом и в биполярных
транзисторах. Например, известный способ разделения сигнала на постоянную и переменную
составляющие при помощи разделительных конденсаторов. Кроме того, можно преобразовать
сигнал в высокочастотный, а после усиления выпрямить (модуляция-усиление-демодуляция).
Но наибольшее распространение получил метод дифференциального каскада. Рассмотрим
его подробнее.
1. ДИФФЕРЕНЦИАЛЬНЫЕ УСИЛИТЕЛИ
1.1. Общие сведения о ДУ
Дифференциальный усилитель (ДУ) — это симметричный усилитель с двумя входами и
двумя выходами, используемый для усиления разности напряжений двух входных сигналов. ДУ
используются в тех случаях, когда слабые сигналы можно потерять на фоне помех, Примерами
таких сигналов являются цифровые сигналы, передаваемые по длинным кабелям, звуковые
сигналы, радиотехнические сигналы, передаваемые по двухпроводному кабелю (двухпроводный
кабель является дифференциальным), напряжения электрокардиограмм, сигналы считывания
информации из магнитной памяти и многие другие. ДУ на приемном конце восстанавливает
первоначальный сигнал, если синфазная помеха не очень велика.
ДУ широко используется в качестве первого каскада операционных усилителей. Они играют
важную роль при разработке усилителей постоянного тока, так как симметричная схема ДУ по
сути своей приспособлена для компенсации температурного дрейфа.
+Е1
Rкк1
Rкк2
Uвыхвых2
Uвыхвх1
Uвыхвых1
VT1 VT2
Uвыхвх2
I0
- E2
Рис. 4.1. Принципиальная схема ДУ
Основная схема ДУ приведена на рис, 4.1. В общую эмиттерную цепь ДУ включен источник
стабильного тока, который обеспечивает постоянство токов Iк1 + Iк2 = Iо. Ток I0 не должен зависеть
от уровня сигнала на входе ДУ (даже при коротком замыкании в цепи нагрузки этого генератора
ток I0 должен оставаться неизменным).
Рассмотрим принцип действия ДУ и его усилительные параметры на примере простейшей
биполярной схемы рис. 4.1. Предположим, что оба транзистора ДУ имеют строго одинаковые
характеристики и параметры, и Rк1 = Rк2. При этом условии, если входной сигнал Uвх 0, то и
напряжение между выходами ДУ U вых 2 U вых1 0 .
2
Для идеального симметричного ДУ в режиме баланса эмиттерный ток I0 делится поровну
между двумя усилительными транзисторами. Если пренебречь базовыми токами, можно считать,
что коллекторные токи транзисторов одинаковы и равны 0,5 I0
I k1 I k2 0,5I 0
Это соотношение не изменится, если оба входных напряжения получат приращения на одну и
ту же величину (синфазный сигнал). Так как в этом режиме коллекторные токи остаются равными
друг другу, то будет постоянна и разность выходных напряжений. Отсюда следует, что
коэффициент усиления синфазного сигнала равен нулю.
В идеальном ДУ синфазный сигнал на его входах не вызывает появление дифференциального
выходного сигнала. Однако, в реальной схеме наблюдается небольшой дифференциальный
выходной сигнал. Он обусловлен неполной идентичностью характеристик транзисторов, разницей
в значениях коллекторных сопротивлений Rк1 и Rк2 и внутренних сопротивлений источников,
подключенных к входам каскада.
Напряжение на коллекторе каждого транзистора, называемое напряжением баланса,
относительно нулевой шины
U к1, 2 E1 0,5I 0 Rk
.
Если Uвх1 > Uвх2, то изменяется распределение токов в ДУ: Iк1 увеличивается, а Iк2 —
уменьшается. Их сумма при этом остается равной I0. Поэтому Iк1 = –Iк2. Таким образом,
разность входных напряжений в отличие от синфазного управления вызывает изменение
выходного напряжения. При этом
Uвых1 = E1 – Iк1Rк;
Uвых2 = E1 – Iк2Rк.
Полный дифференциальный выходной сигнал наблюдается между выходами ДУ
Uвых2 – Uвых1 = (Iк1 – Iк2)Rн.
Изменение выходных сигналов прекращается, когда весь ток переключится в транзистор VT1.
Транзистор VT2 в этом случае перейдет в состояние отсечки. Максимальная разность сигналов
между выходами
Uвых2 – Uвых1 = I0Rк,
а напряжение на коллекторе транзистора VT 1 имеет минимальный уровень Е1 – I0Rн.
Таким образом, разность входных напряжений в отличие от синфазного управления вызывает
изменение выходного напряжения.
Изменение напряжения Uэб, происходящее под воздействием температуры, действует как
синфазный сигнал и, следовательно, слабо влияет на работу схемы. Поэтому для уменьшения
дрейфа нуля в УПТ широко применяют ДУ. Из-за малого дрейфа нуля ДУ используют и для
усиления однополярного сигнала. В этом случае один из двух входов ДУ имеет нулевой
потенциал. На рис. 4.2, а, б, в показаны способы подачи дифференциального сигнала на ДУ.
Дифференциальный усилитель, как указывалось выше, управляется разностью напряжений,
которая приложена между его входами. Сигнал, имеющийся между входами, называется
дифференциальным.
Точка заземления дифференциального сигнала, как видно из рис. 4.2, может быть выбрана
произвольно.
VT1
Uвыхвх
VT2
I0
VT2
VT1
I0
Uвыхвх
VT1
Uвыхвх
2
VT2
I0 Uвыхвх
2
а)
б)
в)
Рис. 4.2. Способы подачи сигналов на ДУ: а, б, — способы заземления входов; в — дифференциальное
включение источника сигнала.
3
1.2.
Малосигнальные усилительные параметры ДУ
Проведем анализ работы ДУ с целью определения его усилительных параметров при
различных схемах включения источников сигнала и подключения нагрузки. Для упрощения
расчетов будем считать, что внутреннее сопротивление генератора тока имеет конечную
величину.
В схеме рис. 4.3, а генератор стабильного тока моделируется резистором Rэ и источником
напряжения ЕК- – Uэб.
Рис. 4.3. Распределение потенциалов и токов в схеме ДУ: а эквивалентная схема ДУ по переменному
току;
б — эквивалентная схема входной цени ДУ
Предположим также, что схема рис. 4.3, а абсолютно симметрична, т. е. сопротивления
резисторов, входящих в каждое плечо, и параметры транзисторов одинаковы. Предполагаются
одинаковыми и входные сопротивления транзисторов VT1, VT2. Допустим также, что внутреннее
сопротивление источника сигнала Rг намного меньше входного сопротивления, а напряжение Uг
близко к нулю.
Так как схема ДУ симметрична, то ток I0 делится поровну между усилительными
транзисторами. В режиме малого сигнала приращение коллекторных токов Iк много меньше
0,5I0. Во входной цепи усилителя от источника Uг течет ток сигнала:
Iвх = Ic = Uг / (Rг + 2h11э) = Uг /(2 h11э).
Цепь входного сигнала показана на рис. 4.3, б пунктирной линией. В базу транзистора VT1 ток
втекает, и его коллекторный ток увеличивается, а из базы транзистора VT2 вытекает, и
коллекторный ток уменьшается. Соответственно на коллекторных резисторах создаются
приращения выходных сигналов
URК = ± IRк = ± IгRк
Подставив в приведенное выражение значение входного тока, определим дифференциальный
коэффициент усиления
Кд = Uвых/Uвх = 2Rк /(2h11э) = SRк,
(4.1)
где S = Iк/Uэб =/h11э — крутизна усиления транзистора.
Минимальный коэффициент усиления по напряжению ДУ соответствует КUэ для одиночного
каскада с ОЭ. Это происходит потому, что в режиме, близком к балансу, на каждый транзистор
поступает половинное входное напряжение Uвх/2 а приращения сигналов между выходами двух
транзисторов суммируются. В этом режиме крутизна усиления наибольшая.
Формула (4.1) верна как для биполярных, так и для униполярных дифференциальных каскадов,
усилительные транзисторы которых имеют крутизну S. Если в выражение (4.1) подставить
значение крутизны биполярного транзистора
S=Iэ/T = I0/2T,
то получим зависимость Кд от тока
Кд = Rк I0 /(2T).
Дифференциальный коэффициент усиления биполярного ДУ прямо пропорционален
сопротивлению нагрузки Rк, уровню тока I0 и обратно пропорционален температурному
коэффициенту. Значение КД от коэффициента не зависит (при »1).
На рис. 4.3, б показана малосигнальная эквивалентная схема входной цепи ДУ, нагружающая
дифференциальный источник сигнала. Так как эмиттерный ток каждого транзистора в ( +1) раз
превышает базовый, то сопротивление резистора пересчитывается в контур входного тока с
коэффициентом (+1). Так как сопротивление Rэ велико, то можно считать, что входное
дифференциальное сопротивление ДУ, наблюдаемое между его входами Вх. 1 и Вх. 2:
4
Rвх д 2 T ( 1) / I э 4 T ( 1) / I 0
.
Рис. 4.4. Определение коэффициента передачи синфазного сигнала: а — схема для расчета синфазного
коэффициента передачи; б — эквивалентная схема входного сопротивления ДУ для синфазного сигнала;
в — обобщенная эквивалентная схема входной цепи ДУ
Рассмотрим теперь случай, когда оба входа ДУ объединены и на них подан общий синфазный
сигнал Ес. (см. рис. 4.4). В синфазном режиме за счет тока синфазного сигнала Iсс/2 уровень тока Ic
увеличивается на величину Icc(+1) . Соответственно приращение коллекторных токов составляет
I=0,5 Iсс. На рис. 4.4, б показана эквивалентная схема входной цепи ДУ для синфазного сигнала.
Так как
I cc Ec / 0,5h11Э Rэ (1 ) ,
то приращение коллекторного напряжения
U вых I Rk Eс Rк /( 2 Rэ ) .
Таким образом, если входное сопротивление транзистора много меньше сопротивления Rэ, то
абсолютное значение коэффициента синфазной передачи
Кс = Rк/2Rэ
(4.2)
и уровень тока Icc оказывается тем меньше, чем больше выбрано сопротивление резистора Rэ.
Выражение (4.2) приблизительно, так как оно не отражает увеличение Кс за счет асимметрии плеч
ДУ и не учитывает Rг. Реально Кс имеет большое число составляющих, которые сложным образом
зависят от разбаланса элементов, структуры схемы и частоты сигнала.
Если синфазная ошибка накладывается на выходной дифференциальный сигнал одного плеча,
то ее можно пересчитать во входную цепь через полный дифференциальный коэффициент
усиления, т. е. Кд. Выходные синфазные ошибки усиления сигнала, приведенные к входу,
позволяют определить минимальный уровень входного сигнала между входами, который может
быть обнаружен на фоне выходных сигнальных ошибок.
Таким образом, напряжение Ег, присутствующее на входах ДУ, вызывает между этими
входами эквивалентное дифференциальное напряжение ошибки
U c Ec K c / K д
Качество ДУ характеризуется отношением Кс/Кд., показывающим способность ДУ различать
малый дифференциальный сигнал на фоне большого синфазного напряжения. Отношение
K c / K д Rk /( 2 Rэ S Rk ) = 1/(2 S Rэ )
пригодно для анализа любых (полевых и биполярных) ДУ.
Для биполярного ДУ
Kc
h
11Э T
K д 2 RЭ I 0 RЭ .
Наиболее часто используется логарифмическая форма этого параметра: относительное ослабление
синфазного сигнала (ООСС)
ООСС = 20 lg (Кс / Кд)
Для современных полупроводниковых ДУ значение ООСС находится в пределах от –60 до –100 дБ.
Синфазное входное сопротивление Rс, как и Кс, определяется выходным сопротивлением генератора
стабильного тока Rэ. Значение Rс всегда на несколько порядков больше, чем Rвх д.:
R вх с 0,5 h11 Э ( 1) Rэ (1 ) Rэ
.
5
На рис. 4.4, в показана обобщенная схема входной цепи ДУ. Согласно этой схеме между
входами ДУ наблюдается сопротивление Rвх д. Им нагружается источник дифференциального
сигнала. Эквивалентное сопротивление 2Rвx c включается между каждым входом и общей шиной,
поэтому в режиме подачи синфазного сигнала этот источник нагружается на сопротивление Rвх с.
Выходное сопротивление ДУ определяется параллельным включением резистора коллекторной
нагрузки Rк и выходным сопротивлением усилительного транзистора.
1.3.
ДУ в режиме большого сигнала
Рассмотрим теперь работу ДУ в режиме большого сигнала. Как известно, зависимость
коллекторного тока транзисторa от величины напряжения Uэб приближенно описывается
выражением:
I к I so еUбэ / T
Тогда
I к1 I э' 0 еUбэ1/ T
I к2 I э' 0 еUбэ 2 / T
,
где I’э0 — обратный ток перехода. Так как
I0 = Iк1 + Iк2;
Uвх д = Uбэ1 – Uбэ2
то
/
I к1
eUвх д T
Iк2
У идеально подобранной пары транзисторов при Uвх0 напряжение Uбэ одного
транзистора увеличится на 0.5Uвх, а другого уменьшится на ту же величину.
Рис. 4.5. Передаточная характеристика ДУ
Передаточная характеристика, описываемая этим выражением, приведена на рис. 4.5.
Линейный участок этой характеристики составляет около ±2T≈±50 мВ. На основе передаточной
характеристики можно рассчитать коэффициент нелинейных искажений.
Если U вх U m sin t , то
I к1
Um
U m3
3sin t sin 3 t
0,5 I 0 (1
sin t
3
2 T
96 T
.
Определим коэффициент нелинейных искажений как отношение амплитуды третьей
гармоники к амплитуде первой гармоники:
K ни
U m3 /(96T3 )
U m2 /(96T2 )
1 U
m
3
3
2
2
U m /( 2T ) 3U m / 96 T 1 / 2 3U m / 96T 48 T
2
.
Таким образом, коэффициент нелинейных искажений увеличивается пропорционально
квадрату напряжения Uвх m и имеет значение намного меньше, чем в схеме с общим эмиттером. Для
сравнения рассчитаем максимальную амплитуду входного сигнала Uвx max, при которой
коэффициент нелинейных искажений достигает 1%. Она составляет
U вх max
T
2
0,48
U вх max 0,7
T 18 мВ
.
Если предположить, что Кд=80, то при этом получим амплитуду выходного сигнала 1,44 В в
отличие от 0,2 В в схеме с общим эмиттером.
6
1.4.
ДУ с отрицательной обратной связью
Сравнительно узкий линейный участок передаточных характеристик ДУ не позволяет
применять ДУ для усиления без искажений сигналов с амплитудами свыше 20–25 мВ (см. рис.
4.5).
Рис. 4.6. ДУ с ООС по току
Этот недостаток легко устраняется введением ООС по току, которая, кроме того, повышает
входное сопротивление и стабильность работы схемы. Для этого в эмиттерную цепь каждого
транзистора включается резистор (рис. 4.6). Если разность напряжений Uвхд=Uвх1–Uвх2 изменяется
на величину U, то напряжение на обоих резисторах также изменится примерно на величину U.
Приращение коллекторного тока
I k1 I k2 U / 2 Rэ
.
Тогда коэффициент усиления ДУ по напряжению
K д Rк /( 2 Rэ )
Анализ показывает, что максимальное значение крутизны в схеме рис. 4.6 при Uвх д=0 и
Iк1=Iк2=0,5I0
S max ос 0,5I o /( T I o Rэ )
,
что в (1+2SmaxRэ) раз меньше крутизны ДУ без обратной связи (Smax=I0/(2T) ). Однако ООС с
помощью резисторов Rэ улучшает линейный участок передаточных характеристик, ухудшает
ограничительную способность ДУ и увеличивает его входное сопротивление. На прохождение
синфазного сигнала резисторы Rэ не влияют.
Если в схеме ДУ применить два источника стабильного тока, как показано на рис. 4.7, а, то
ООС по току можно обеспечить с помощью одного резистора. При отсутствии входного сигнала
по этому резистору не будет протекать ток. Это дает возможность с помощью резистора изменять
коэффициент усиления без изменения величины выходного потенциала при отсутствии сигнала.
В ряде случаев в усилителях требуется регулировать усиление электронным способом.
Электронное регулирование усиления применяется в устройствах связи, таких как усилители
высокой и промежуточной частоты, поскольку увеличивает динамический диапазон по входному
сигналу.
Рис. 4.7. Введение ООС по току в ДУ: а — с помощью одного резистора; б — ДУ с электронной
регулировкой коэффициента усиления
Электронное регулирование усиления позволяет управлять усилением с помощью замкнутой
схемы автоматической регулировки усиления (АРУ).
7
В усилителях на дискретных элементах электронная регулировка усилением достигается, как
правило, путем смещения рабочей точки одного или нескольких каскадов или постановкой
диодного аттенюатора между каскадами. В монолитных интегральных схемах, в которых
неприемлема связь между каскадами только по переменному току, такие методы регулирования
усиления приводят к нежелательным сдвигам уровня постоянного напряжения в схеме и,
следовательно, не могут применяться.
На рис. 4.7, б приведена схема ДУ, в которой регулировка усиления осуществляется
электронным способом. В этой схеме в качестве управляемого напряжением элемента связи между
каскадами на биполярных транзисторах VT1 и VT2 используется зависящее от приложенного
напряжения сопротивление канала полевого транзистора. Полевой транзистор с каналом n-типа
легко изготовить одновременно с биполярными транзисторами. Так как исток и сток полевого
транзистора имеют почти одинаковые потенциалы, через канал протекает очень небольшой
постоянный ток. Следовательно, уровни смещения по постоянному току в схеме не изменяются
под действием управляющего напряжения Uy, которое приложено к затвору полевого транзистора.
Коэффициент усиления по напряжению можно выразить отношением сопротивления резистора
нагрузки к сопротивлению канала между истоком и стоком полевого транзистора. Величина
сопротивления между стоком и истоком является функцией управляющего напряжения Uy. Для
полевого транзистора с равномерным распределением примесей в канале эта зависимость
приближенно выражается в следующем виде:
Rcи Rси о / 1 U у / U 0
,
где Rси — величина сопротивления между истоком и стоком при нулевом управляющем
напряжении; U0 — напряжение отсечки полевого транзистора;
Таким образом, коэффициент усиления схемы рис. 4.7, б по напряжению имеет вид
Kд
Rн
1 U y /U 0
2 Rси о
При коэффициенте усиления 20 дб диапазон автоматической регулировки усиления
оказывается не менее 40 дб в рабочем диапазоне частот.
1.5. Источники ошибок усиления постоянной составляющей сигнала
Разрешающая способность ДУ при изменении температуры, напряжения питания и
воздействии других внешних факторов связаны с источниками статических ошибок усиления. На
рис. 4.8 показаны основные токи и напряжения, наличие и разбаланс которых приводит к этим
ошибкам.
Ошибка Uс из-за Ес была рассмотрена выше. При известных значениях ООСС
Uc Ec 10
ООСС
20
,
где ООСС выражается в децибелах. Например, при Ес = 5B и ООСС =–80 дБ входная ошибка
Uс = 510–4 = 0,5 мВ.
В реальной интегральной схеме с дифференциальным биполярным входом значительная часть
ООСС определяется разностью коэффициентов усиления по току входных транзисторов .
Например, если коэффициенты усиления отличаются на 2%, то OOCC 1OO дб.
Рис. 4.8. Формирование генераторов ошибок усиления постоянной составляющей сигнала в ДУ
8
Одним из параметров ДУ является напряжение смещения нуля. Это малый постоянный сигнал,
который надо приложить между входами, чтобы сбалансировать ДУ. Напряженно Uсм ДУ имеет
несколько составляющих. Если для транзисторов усилителя на рис. 4.1 считать неидеально
согласованными лишь напряжения Uэб, а номиналы резисторов Rк1 и Rк2 равными и не зависящими
от температуры, то
Uсм = Uбэ = Uбэ1 – Uбэ2
Или:
I
I
I
U бэ T ln 0 ln 0 T ln s1
2I s 2
I s2 ,
2 I s1
где Is1, Is2 — токи утечки переходов база-эмиттер. Из полученного выражения следует, что
Uбэ будет стремиться к нулю, если токи утечки эмиттерных переходов будут равны. Для этого
оба интегральных транзистора делают геометрически строго одинаковыми и располагают на
подложке как можно ближе один к другому. Напряжение Uбэ имеет для большого количества
изделий некоторый разброс. Из партии приборов отбираются изделия с требуемыми значениями
Uбэ. Таким образом, напряжение Uбэ, определяющее процент выхода годных изделий,
характеризует «качество» технологического процесса производства дифференциальных
биполярных транзисторных пар.
Определим эквивалентную разность температур управляющих переходов, вызывающую
0,5I 0
U бэ 0 T ln
I
S , то
напряжение Uбэ при условии, что Iк1=Iк2. Так как Uбэо =
0,5 I 0
q
U бэ 0
ln
KT
IS
(4.3)
Пусть напряжение база-эмиттер первого транзистора равно Uбэ, а второго — Uбэ + Uбэ;
температура первого транзистора равна Т, а второго Т+Т при одинаковых значениях ln(0,5I0 /Is).
Тогда
KT 0,5 I 0
U бэ 0
ln
q I S
,
(4.4)
K T T 0,5 I 0
U бэ 0 U бэ
ln
q
IS
(4.5)
Вычитая (4.4) из (4.5) и подставляя (4.3), получаем
U бэ
T
U бэ 0
T
Подсчитаем в качестве примера эквивалентную разность температур двух соседних
транзисторов при Т=300К, Uбэ=600 мВ и Uбэ=1 мВ
U бэ
T
T 0,5
U бэо
.
Зависимость Uбэ характеризуется температурным коэффициентом
Tк Uбэ = [Uбэ(T max) Uбэ(T min)]/(T max – T min) ???
Абсолютное значение Тк Uбэ определяет основную часть температурного дрейфа усилителя
любой сложности, у которого на входе будет работать эта пара транзисторов. Биполярные пары
ДУ высокого качества имеют температурный коэффициент 1…4 мкВ/°С.
В схеме ДУ рис. 4.1 возникает также напряжение разбаланса на дифференциальном выходе изза неидентичности резисторов Rк1 и Rк2. Чтобы сбалансировать ДУ, необходимо перераспределить
токи коллекторов, т. е. подать на вход ДУ небольшое напряжение
UR = I0R / (2Кд)
Чем меньше уровень тока I0 и разброс сопротивлений резисторов R, тем меньше эта доля
ошибки в общем напряжении Uсм0, суммируемая с Uбэ. Так как Кд=I0Rк/(2T), то напряжение
ошибки из-за неравенства сопротивлений коллекторных резисторов
9
UR = 0,5I0R / Кд = T R/RК.
На подложке интегральной схемы согласованные резисторы Rк1 и Rк2 изготавливаются в виде
близко расположенных дорожек одинаковой конфигурации. Поэтому разность их номиналов
имеет порядок около 1% (при абсолютном разбросе Rк от подложки к подложке 20…30%). В этом
случае ошибка UR=0,3…0,5 мВ и значительно возрастает, если дифференциальные выходы будут
нагружены несимметрично, так как при этом увеличится R/Rк.
Входные токи усилителя и их разность генерируют на входах ДУ значительные напряжения
ошибки, если источник сигнала высокоомный. Из-за разности входных токов на резисторе Rг
выделяется напряжение, которое приложено между входами, т. е. последовательно с источниками
сигнала. Величина этой ошибки зависит от абсолютного уровня входного тока, называемого
входным током смещения усилителя
Iсм = (Iб1 + Iб2) / 2,
который определяется как полусумма входных токов. Если в ДУ установлен уровень тока I0 и
известны значения 1 и 2, (причем 1 = 2 = ), то
Iб1 = 0,5Io / 1,
Iб2 = 0,5Io / 2,
I см = 0,5Iо /.
При известных значениях Iвх=Iб1 - Iб2 и Rг можно подсчитать дополнительную ошибку
смещения нуля:
Uсмо (Iвх) = Iвх Rг = (Iб 1 – Iб 2)Rг = 0,5Io Rг (1/2–1/ 1).
Коэффициенты усиления тока базы транзисторов могут отличаться для интегральной пары на
5% и более. Пусть I0 = 40 мкА, 1 = 50, 2 = 53 и Rг =100 кОм, тогда ошибка смещения нуля за счет
Iвх составляет 2,3 мВ.
На напряжение смещения нуля значительное влияние оказывают изменения обоих напряжений
питания ДУ. Качество усилителя по устойчивости к изменениям напряжений питания Е1 и Е2
характеризуется отношением Uсмo/E2 при Е1=сonst и Uсмo/E1 при Е2=const.
Некоторое напряжение ошибки разбаланса возникает в ДУ с течением времени. Эта ошибка
проявляется в виде среднего временного дрейфа тока и среднего временного дрейфа напряжения и
вызывается процессами старения элементов.
1.5.
Генератор стабильного тока
Идеальный источник тока обеспечивает в нагрузке ток, который не зависит от напряжения на
этой нагрузке. Вследствие возможности эквивалентного преобразования источника тока в
источник напряжения и наоборот, схему идеального источника тока можно построить на базе
источника напряжения с последовательно включенным высокоомным резистором.
Если необходим значительный ток КЗ I0, то необходимо выбрать напряжение Е большой
величины. Например, для того чтобы обеспечить ток I0 =1 мА и внутреннее сопротивление
источника тока Rо = 1 мОм необходимо приложить напряжение 1 кВ.
В интегральном ДУ высокоомные резисторы занимают значительную площадь на поверхности
подложки, т. е. существует принципиальное ограничение величины резистора R0. Указанное
условие можно обойти, если потребовать большое внутреннее сопротивление только для
определенного интервала выходных напряжений. В этом случае большим может быть лишь
дифференциальное внутреннее сопротивление R0=dU/dI, тогда как статическое сопротивление
может быть малым. Этой особенностью обладает выходная характеристика транзистора. В то
время как Uкэ/Iк имеет порядок несколько кОм, dUКЭ /dIк составляет несколько сотен кОм. С
помощью отрицательной обратной связи значение дифференциального внутреннего
сопротивления можно увеличить на несколько порядков.
10
Рис. 4.9. Генераторы стабильного тока: а — ГСТ с диодным смещением; б — ГСТ с резисторами в цепях
эмиттеров транзисторов
На рис. 4.9, а приведена одна из возможных схем генератора стабильного тока (ГСТ).
Транзистор VT1 в диодном включении выполняет роль температурной компенсации напряжения
Uбэ транзистора VT2. Так как коллектор транзистора VT1 соединен с базой, то Uкэ=Uбэ > Uкэ нас.
Следовательно, транзистор VT1 ненасыщен. Поскольку Uбэ1=Uбэ2, то при хорошо подобранных
транзисторах Iб1=Iб2=Iб и Iк1=Iк2=I 1б. При этом
I1 =Iб +2Iб ;
I2=Iб.
Отсюда
I2=[/(+2)]I1 I1 .
Благодаря тому, что ток I2 пропорционален току I1 схема называется «токовым зеркалом».
Рассмотрим, каким образом обеспечивается необходимый ток в схеме ГСТ. Из уравнений
Эберса–Молла следует, что эмиттерный ток транзистора связан с напряженном Uбэ соотношением
U бэ T ln( I э / I э 0 )
(4.6)
где Iэо — обратный ток насыщения. Обратный ток насыщения пропорционален площади
перехода эмиттер-база
Iэ0 = γЭS
(4.7)
Коэффициент пропорциональности γЭ зависит от собственных параметров полупроводника. Из
уравнений (4.6) и (4.7) следует, что если транзисторы VT1 и VT2 работают при одном и том же
напряжении эмиттер-база, то их эмиттерные токи относятся как площади их эмиттеров
I э1 / I э 2 S1 / S 2
(4.8)
Так как ток Iк отличается от тока Iэ на величину тока базы Iб, то при больших значениях 0»1 Iэ
в уравнениях (4.6) и (4.8) можно заменить на Iк. не допуская при этом заметной погрешности.
Тогда для схемы рис. 4.9, а имеем
I 2 / I1 S 2 / S1 .
Учитывая падение напряжения на переходе база-эмиттер, величину тока ГСТ можно
определить из соотношения
I 2 ( E U бэ ) / R1 S 2 / S1 U к S 2 /( R1 S1 )
(4.9)
Выражение (4.9) справедливо в широком диапазоне изменений тока ГСТ и температур. Таким
образом, ГСТ с диодным смещением обеспечивает получение тока I0, не зависящего от параметров
приборов. Его можно масштабировать соответствующим выбором площадей эмиттеров двух
данных транзисторов.
На рис. 4.9, б изображена схема ГСТ с диодным смещением, в которой для задания токов
используется отношение сопротивлений резисторов, а не площадей эмиттеров. Пренебрегая током
базы транзистора, величину тока через каждый из транзисторов можно определить из
соотношения
I 1 R1 U бэ1 I 2 R2 U бэ 2 U см
(4.10)
Разность падений напряжения база-эмиттер для двух идентичных транзисторов при данных
коллекторных токах I1 и I2 можно записать в виде
U бэ U бэ 2 U бэ1 T ln ( I 2 / I 1 )
(4.11)
Таким образом, из (4.10) и (4.11) для отношения токов можно получить
I 2 R1 T ln( I 2 / I 1 )
1
I 1 R2
R1 I1
.
Если падение напряжения на резисторе R1 сравнимо с напряжением Uбэ„ то второе слагаемое в
квадратной скобке мало по сравнению с единицей и
I 2 / I1 R1 / R2 ,
(4.12)
При I1R1 Uэб равенство (4.12) выполняется с максимальной ошибкой меньше ±10% в
диапазоне двух порядков величины тока, т.е.
0,1<|I2/I1|<10
независимо от температуры.
11
ГСТ с резисторным смещением предпочтительнее простого источника с диодным смещением,
изображенного на рис. 4.9, а, в случае, когда отношение I1/I2 значительно отличается от единицы,
поскольку отношение сопротивлений резисторов можно варьировать в более широком диапазоне,
чем отношение площадей эмиттеров. При R1= 0 ток I2«I1 и слабо зависит от источника питания.
Эта особенность ГСТ при R1 = 0 широко используется во входных каскадах операционного
усилителя.
1.7 Общие сведения
Операционный усилитель (ОУ) - это усилитель постоянного тока с малым дрейфом нуля, очень
большим коэффициентом усиления, большим входным сопротивлением и малым выходным
сопротивлением.
ОУ выпускаются в виде микросхем, поэтому могут рассматриваться как единичные активные
приборы широкого применения. Типовая структура ОУ:
- симметричный двухвходовый дифференциальный каскад;
- двухвходовый, симметричный или несимметричный дифференциальный каскад с одним
выходом;
- схема сдвига уровня;
- выходной усилитель.
Входной ДК имеет инвертирующий и не инвертирующий входы; второй ДК предназначен для
получения большого общего коэффициента передачи, схемы сдвига уровня из-за отсутствия в
схеме ОУ разделительных конденсаторов обеспечивают режим работы транзисторов выходного
каскада по постоянному току (режим покоя).
Выходной каскад обычно представляет собой однотактную или двухтактную схему на
транзисторах с общим коллектором (эмиттерный повторитель) для обеспечения малого выходного
сопротивления.
Часто входной ДК питается через эмиттерные (истоковые) повторители, имеющие высокое
входное сопротивление. Обозначения ОУ:
При подаче напряжения
пропорционально их разности:
одновременно
на
оба
входа
ОУ
выходное
напряжение
Кд - дифференциальный коэффициент усиления,
дифференциальный входной сигнал. Величина Кд реальных ОУ лежит в пределах от 103-106.
Реальный ОУ обладает некоторым ненулевым коэффициентом усиления синфазного сигнала
Кс, т.е. на выходе ОУ при
имеется некоторое напряжение. Отношение Кп=Кд/Кс называется
коэффициентом подавления синфазного сигнала. У реальных ОУ величина К п составляет от 103-105. Физический смысл коэффициента подавления: он определяет величину дифференциального
сигнала, необходимую для компенсации сигнала на выходе ОУ. Режим покоя соответствует
.
Величина U0 характеризует дифференциальное напряжение на входах ОУ, которое
необходимо, чтобы получить на выходе нулевое напряжение. Она составляет доли или единицы
микровольт.
Входное сопротивление для дифференциальных сигналов ОУ, выполненных на биполярных
транзисторах составляет от 104-106, и 1011-1013 на полевых.
Типичная передаточная (амплитудная) характеристика для сигнала показана на рис.2
12
Рис.2
Из рисунка 2 видно, что используемому линейному участку передаточной характеристики
соответствует достаточно узкий диапазон разности входных напряжений, измеряемый в
микровольтах. Абсолютные же значения напряжений на входах могут достигать величины
и
.
1.8. Понятие идеального операционного усилителя
Название "операционный" данный усилитель постоянного тока обязан возможности
использовать его для выполнения различных математических операций (функциональных
преобразований) над сигналами: суммирование и вычитание с заданными весовыми
коэффициентами,
дифференцирование
и
интегрирование,
логарифмирование
и
антилогарифмирование. Для осуществления таких преобразований ОУ должен быть охвачен
отрицательной обратной связью.
Для анализа различных схем с ОУ используют такое понятие как идеальный ОУ.
Идеальный ОУ характеризуется:
В этом случае идеализированную амплитудную характеристику можно представить в виде рис.3.
Рис. 3
откуда видно, что
. Это так называемый первый нуль ОУ. Так как
, то
можно считать, что входной ток ОУ также равен нулю; это второй виртуальный нуль ОУ. Эти
виртуальные нули позволяют легко определить свойства ОУ, охваченного цепями внешней
обратной связи.
1.9. Структура интегрального операционного усилителя
На рис. представлена схема, состоящая из двух по возможности одинаковых транзисторов,
двух коллекторных резисторов, тоже одинаковых, и одного эмиттерного резистора, общего для
двух транзисторов. Схема имеет два входа и один разностный выход. Здесь также обычно
используется два источника питания.
13
Обычно +/- Еп одинаковые. И если Uвх близки к нулю, то на эмиттерном сопротивлении
падает большое и почти постоянное напряжение, поэтому ток, протекающий через это
сопротивление, тоже почти постоянный. Это значит, что мы задали ток эмиттеров. Далее этот ток
разделяется на две части, и протекает через два транзистора.
А теперь давайте рассмотрим случай одинаковых входных напряжений – синфазный
входной сигнал. Теоретически если на входах синфазный сигнал, то ток, протекающий через
транзисторы, будет одинаковый, то есть разделится пополам. Но этот ток задан резистором и
почти не зависит от входного сигнала. Поэтому отклик на синфазный сигнал очень мал, а так как
мы на выходе берём разностный сигнал, то он вообще близок к нулю. Это обусловлено тем, что в
эмиттере напряжение будет меняться почти также, как и в базах: разность потенциалов между
базой и эмиттером меняется гораздо меньше, чем на входах.
Дифференциальный сигнал также одинаков на обоих входах, но противоположен по фазе.
Поэтому на эмиттерах напряжение почти не меняется, полный эмиттерный ток тоже, а на базах
транзисторов напряжение меняется гораздо сильнее, и это приводит к тому, что токи через
транзисторы меняются в разные стороны: на одном транзисторе увеличивается, а на другом –
уменьшается, хотя в сумме он остался неизменным. Поэтому сигнал на выходе (на коллекторах)
будет сильным, да ещё в два раза больше, так как он получается как разность между двумя
коллекторами.
Дело заключается в том, что для синфазного сигнала схема аналогична схеме с ОК: есть
сильная ООС благодаря наличию эмиттерного сопротивления; а для дифференциального сигнала –
аналогична схеме с ОЭ: напряжение на эмиттерах практически не меняется, поэтому можно
считать, что эмиттеры как бы заземлены. Итак, дифференциальный сигнал хорошо усиливается,
как в схеме с ОЭ, а синфазный сигнал сильно ослабляется, как в схеме с ОК во-первых, и за счёт
вычитания коллекторных сигналов во-вторых.
Если сигналы Uвх1 и Uвх2 произвольные, то можно вычислить синфазную и
дифференциальную составляющие по формулам:
U син (U вх 1 U вх 2 ) / 2 U диф (U вх 1 U вх 2 ) / 2
и наоборот:
U вх 1 U син U диф
U вх 2 U син U диф
Обычно для хороших дифференциальных каскадов трудно подобрать достаточно близкие
по параметрам транзисторы и даже резисторы коллекторов, поэтому на практике уже давно, ещё
до возникновения микроэлектроники, стали делать спаренные транзисторы, которые находятся
очень близко друг к другу, изготовлены в одном технологическом режиме и имеют почти
одинаковую температуру. Такие транзисторы не надо подбирать – они созданы специально
похожими, чтобы получать очень низкий коэффициент усиления синфазного сигнала К син. А при
переходе на микроэлектронику вообще все дифференциальные каскады стали делать
интегральным способом. Обычно в этом случае К диф = 100...400, а Ксин =0,1...1. Для оценки
качества дифференциального каскада вводят коэффициент ослабления синфазного сигнала
(КООС):
КООС К диф / К син
Это лежит в пределах 400...1000, или в децибелах 50...60 дБ.
Почему нам так важен синфазный сигнал? Дело в том, что различные дрейфы
транзисторов: старение, тепловой дрейф и так далее – это эквивалентно подаче на входы
одинаковых сигналов, то есть синфазному сигналу. Поэтому если синфазный сигнал сильно
14
ослаблен, то и тепловой дрейф тоже ослаблен. И мы видим, что коэффициент усиления
дифференциального сигнала в 1000 раз сильнее, чем, скажем, тепловой дрейф. Но это значит, что
дифференциальный каскад годится для первого каскада усилителя, который будет предназначен
для усиления с большим коэффициентом усиления, чтобы потом использовать его для усилителя с
ООС. Такие усилители называются операционными (ОУ).
Итак, почти всегда для изготовления ОУ делают первым каскадом дифференциальный. Но
у разных ОУ он бывает разным. Часто вместо обычных транзисторов берут сдвоенные, см. рис.
Здесь мы уже применили принятое в микроэлектронике условное обозначение транзисторов:
без кружочка, обозначающего, что у транзистора есть свой корпус. В микроэлектронике этого
обычно не бывает.
У такого каскада коэффициент усиления сдвоенных транзисторов гораздо больше
(100 =10000). Именно из-за большого коэффициента усиления они и используются.
Но можно использовать супер-бета транзисторы – это специально изготовленные
транзисторы с очень маленькой базой и большим перепадом концентраций в эмиттерной и
базовой области. Коэффициент усиления у них может достигать 5000 и более. К сожалению, эти
транзисторы требуют очень точной технологии, и, кроме того, они не выдерживают больших
напряжений. Поэтому для защиты от пробоя к ним надо добавлять ещё по одному транзистору.
Из-за большой технологической сложности супер-бета транзисторы используются редко.
Иногда входные каскады полезно сделать на основе полевых транзисторов, так как они
имеют очень большое входное сопротивление. Чаще используют полевые транзисторы с р-п
переходом. Но всё же это тоже слишком большое усложнение технологии.
Поэтому в большинстве ОУ используют одинарные биполярные транзисторы, но
принимают меры к тому, чтобы улучшить генератор тока эмиттера, и вместо резистора
используют транзистор. Но чаще всего для этой цели используется схема, которая называется
"токовое зеркало".
Она изображена на рис.:
2
Здесь использованы два одинаковых транзистора (лучше изготовленных в одном цикле), и
через правый, включённый по схеме диода (коллекторный р-п переход закорочен, и остаётся
только эмиттерный р-п переход) пропускается прямой ток. Этот ток определяется формулой:
I 0 (2E n 0,7) / R
Этот ток ни от чего не зависит. Он постоянен. Но значит и напряжение в его базе и базе
соседнего транзистора одинаково и таково, что обеспечивает протекание точно такого же тока и
через соседний транзистор:
I I 0
У нас получилось как бы зеркало: ток, который протекает через правый транзистор, протекает
и через левый, отражается. Но этот ток не зависит от напряжения на коллекторе левого
транзистора. Значит, у нас получился генератор тока. И очень хороший генератор тока, так как у
15
него очень большое выходное сопротивление, равное дифференциальному сопротивлению
коллектора, которое, как мы помним, составляет 100 кОм...10 МОм. Если использовать такой
хороший генератор тока, получится увеличение КООС до 1 000 000 (120 дБ).
В дифференциальном каскаде мы обсудили почти все проблемы. Осталось обсудить только
выход. А он, как мы знаем, должен быть разностным. Это значит, что его нельзя заземлить.
Но если сделать вычитающее устройство? Оказывается, это можно с помощью токового
зеркала, см. рис. внизу. Два верхних транзистора имеют тип р-п-р. Поэтому у них эмиттеры с
другой стрелкой и подсоединены к положительному питанию, а коллекторы внизу и идут к
минусу. Правый транзистор, как у токового зеркала, служит диодом (база-коллектор закорочены).
Поэтому он точно пропускает ток, который проходит через правый транзистор
дифференциального каскада. И этот же ток проходит через левый транзистор токового зеркала. Но
по схеме он соединён с коллектором левого транзистора дифференциального каскада. Получается
противоречие: нижний транзистор даёт ток I1, а верхний – ток I2. Это противоречие разрешается
тем, что к соединению коллекторов подключён ещё один провод, и разница токов уходит по нему
в следующий каскад.
По-сути дела мы заменили коллекторные сопротивления активной нагрузкой. Эта нагрузка
имеет очень большое дифференциальное сопротивление, а значит, даёт ещё большее усиление
каскада.
Теперь рассмотрим следующий каскад усиления. Здесь уже не надо бороться с
температурным дрейфом, так как сигнал уже большой, и дополнительное напряжение дрефа
меньше сигнала. Поэтому можно взять обычный каскад с ОЭ, но для большего коэффициента
усиления выполненный на сдвоенном транзисторе. Схема следующего каскада изображена на
рис.:
Мы представили здесь полную схему. Основные транзисторы – это сдвоенный транзистор
внизу, включённый по схеме ОЭ. На базу этого транзистора подаётся входной сигнал. В
коллекторе транзистора стоит активная нагрузка – второй транзистор токового зеркала. Кроме
того, здесь изображён конденсатор С, который выполняет коррекцию частотной характеристики;
она необходима для предотвращения нестабильности ОУ. Следует отметить, что он не всегда
включается в схему, есть ОУ без коррекции. Тогда, в случае возникновения нестабильности надо
ставить конденсатор в обратную связь всего ОУ.
16
Дальнейшее усиление в ОУ невозможно, так как ОУ с тремя каскадами усиления
становится слишком неустойчивым. Однако можно сделать усиление мощности за счёт каскада с
ОК. Обычно частотная характеристика таких каскадов очень хорошая, поэтому для ОУ она не
вносит ничего отрицательного. Схема этого каскада изображена на рис.:
Пунктирная линия отделяет левую часть – детали второго каскада – от правой части – деталей
третьего каскада. Как мы видим, третий каскад очень простой: в нём всего два транзистора,
включённых по схеме ОК, но двухтактной. Когда напряжение положительное, открыт верхний
транзистор, а нижний выполняет роль очень большого сопротивления, так как он закрыт. И
наоборот, при отрицательном напряжении работает (открыт) нижний транзистор, а верхний –
закрыт и выполняет роль большого сопротивления. Это двухтактный эмиттерный повторитель.
Сложность возникает, когда напряжение мало отличается от нуля (меньше, чем на
контактную разность потенциалов), так как в этом случае оба транзистора практически закрыты.
Решением этой проблемы является включение в выходную цепь двух диодов, как указано на рис.
справа. Эти диоды включены так, что они всегда открыты, то есть на прохождение тока в
выходной цепи второго каскада они не влияют, но на диодах падает примерно две контактных
разности потенциалов, поэтому один выходной сигнал левой схемы разделяется на два для правой
схемы, которые отличаются примерно на 2 контактный разности потенциалов, и транзисторы
третьего каскада не могут быть одновременно закрыты. Ситуация иллюстрируется на рис.:
Этот рис. сделан для левой схемы. Выходной сигнал на контактную разность потенциалов
меньше входного (больше входного для отрицательных величин). Для правого рис. выходной
сигал точно совпадёт со средней величиной от двух входных сигналов.
Итак, мы рассмотрели по отдельности работу всех трёх каскадов ОУ. Давайте посмотрим, как
выглядит схема всего ОУ. На нижнем рис. представлена полная схема ОУ, как мы её обсуждали
выше. Здесь 12 транзисторов и 2 диода. Но каскадов всего 3, да и то третий не усиливает
напряжение, а усиливает только ток, или мощность. То-есть по напряжению усиливают только 2
каскада. Давайте посмотрим, куда ушли 12 транзисторов.
Два транзистора (Т1 и Т2) ставятся параллельно, и имеется два параллельных входа, это
потому, что мы должны исключить температурный дрейф, а заодно и другие дейфы, например,
связанный со старением схемы. Ещё 2 транзистора могут использоваться для увеличения
коэффициента усиления, если вместо этих транзисторов поставить сдвоенные. 2 транзистора
используются как вспомогательные для генератора тока (токовое зеркало, Т3, Т4). Два
транзистора используются в качестве активной нагрузки (Т5,Т6). А на самом деле в первом
каскаде может использоваться ещё больше транзисторов, например, для защиты от перегрузки.
Во втором каскаде у нас 4 транзистора: один сдвоенный транзистор (Т7,Т8) и 2 в качестве
активной нагрузки (токовое зеркало, Т9,Т10). Кроме того, здесь используются два диода, а в
микроэлектронике вместо диодов, как правило, используются транзисторы. Всего получается 6.
17
Самый простой последний каскад: в нём всего два транзистора Т11 и Т12.
Мы уже говорили, что современные ОУ делаются только по технологии микросхемотехники. А
в микросхемотехнике очень просто делать транзисторы, несколько сложнее делать диоды и
резисторы, ещё более сложно делать конденсаторы и совсем сложно делать индуктивности.
Поэтому число транзисторов совершенно несущественно (правда, несколько сложнее делать
комплементарные транзисторы). В современных ОУ число транзисторов достигает 50 шт и более.
Но при современных возможностях изготавливать микросхемы со степенью интеграции в 10 6 - это
не проблема.
1.10. Внутренняя структура операционного усилителя 741
Операционный усилитель 741 (другие обозначения: uA741, μA741) — один из первыхA741) — один из первых
интегральных операционных усилителей на биполярных транзисторах. Разработан в 1968 году и
производится до сих пор.
ОУ 741 исторически использовался для аудио и других малосигнальных применений. В настоящее
время он применяется редко, поскольку современные ОУ имеют значительно лучшие характеристики
по большинству параметров, в частности, меньший шум, лучший коэффициент ослабления
синфазного сигнала и т.д.
Структура ОУ
Несмотря на то, что проще и полезнее рассматривать операционный усилитель как черный
ящик с характеристиками идеального ОУ, важно также иметь представление о внутренней
структуре ОУ и принципах его работы, так как при разработке с использованием ОУ могут
возникнуть проблемы, обусловленные ограничениями его схемотехники.
Структура ОУ различных марок отличается, но в основе лежит один и тот же принцип. ОУ
состоят из следующих функциональных блоков:
18
Внутренняя схема операционного усилителя 741
1. Дифференциальный усилитель
Входной каскад — обеспечивает усиление при малом уровне шума, высокое входное
сопротивление. Обычно имеет дифференциальный выход.
2. Усилитель напряжения
Имеет высокий коэффициент усиления по напряжению, спад Амплитудно-частотной
характеристики как у однополюсного фильтра низких частот, обычно единственный (то есть не
дифференциальный) выход.
3. Выходной усилитель
Выходной каскад — обеспечивает высокую нагрузочную способность по току, низкое
выходное сопротивление, ограничение выходного тока и защиту от короткого замыкания в
нагрузке.
Токовые зеркала
Части схемы, обведенные красной линией являются токовыми зеркалами. Первичный ток,
который задает все остальные токи, определяется напряжением питания ОУ и резистором 39 kΩ
(плюс два падения напряжения на диодном переходе). Первичный ток составляет примерно
Режим входного каскада по постоянному току задается двумя токовыми зеркалами слева.
Токовое зеркало, образованное транзисторами Q8/Q9 позволяет работать с большими синфазными
напряжениями на входе, не выходя при этом из активного режима работы транзисторов. Токовое
зеркало Q10/Q11 косвенно используется для установки тока покоя входного каскада. Этот ток
устанавливается резистором 5 kΩ. Цепь задания тока смещения работает следующим образом.
Если ток входного каскада начинает отличаться (отличие обнаруживает транзистор Q8) от
значения, заданного транзистором Q10, это отражается в токе Q9, что приводит к изменению
напряжения в точке соединения коллекторов Q9 и Q10. Это напряжение, поступая на базы Q3 и
Q4, уменьшает отклонение тока входного каскада от номинального. Таким образом, постоянная
составляющая тока входного каскада стабилизирована глубокой отрицательной обратной связью.
Токовое зеркало Q12/Q13 обеспечивает для усилителя класса А постоянный ток нагрузки, этот
ток практически не зависит от выходного напряжения ОУ.
Дифференциальный входной каскад
Часть схемы, обведенная синей линией, является дифференциальным усилителем. Транзисторы
Q1 и Q2 работают как эмиттерные повторители, они нагружены на пару транзисторов Q3 и Q4,
19
включенных как усилители с общей базой. Помимо этого Q3 и Q4 согласуют уровень напряжения
и обеспечивают предварительное усиление сигнала перед подачей его на усилитель класса А.
Дифференциальный усилитель из транзисторов Q1 - Q4 имеет активную нагрузку — токовое
зеркало, состоящее из транзисторов Q5 - Q7. Транзистор Q7 увеличивает точность (равенство
токов в ветвях) токового зеркала путем уменьшения тока сигнала, отбираемого с коллектора Q3
для управления базами транзисторов Q5 и Q6. Это токовое зеркало обеспечивает преобразование
дифференциального сигнала в недифференциальный следующим образом:
Ток сигнала через коллектор Q3 поступает на вход токового зеркала, при этом выход
зеркала (коллектор Q6) соединен с коллектором Q4.
Здесь токи коллекторов Q3 и Q4 суммируются, поскольку для дифференциальных входных
сигналов сигнальные токи через транзисторы Q3 и Q4 равны по абсолютному значению и
противоположны по направлению.
Таким образом, сумма вдвое превышает токи, текущие через транзисторы Q3 и Q4.
Напряжение сигнала на коллекторе Q4 в режиме холостого хода равно произведению суммы
сигнальных токов и сопротивлений коллекторов Q4 и Q6, включенных параллельно. Это
произведение относительно велико, поскольку сопротивления коллекторов для токов сигнала
большие[1].
Следует отметить, что ток базы входных транзисторов ненулевой и дифференциальное
сопротивление входа ОУ 741 составляет примерно 2 MΩΩ.
ОУ имеет два вывода балансировки (на рисунке обозначены Offset), которые обеспечивают
возможность подстройки напряжения смещения входа ОУ до нулевого значения. Для подстройки
нужно подключить к выводам потенциометр.
Усилительный каскад класса А
Часть схемы, обведенная пурпурной линией, является усилительным каскадом класса А. Он
состоит из двух n-p-n транзисторов, включенных как пара Дарлингтона. Коллекторной нагрузкой
является выходная часть токового зеркала Q12/Q13, благодаря чему достигается высокое усиление
этого каскада. Конденсатор емкостью 30 пФ обеспечивает частотно-зависимую отрицательную
обратную связь, которая повышает устойчивость ОУ при работе с внешней обратной связью.
Такая техника называется компенсация Миллера, она функционирует практически так же, как и
интегратор, построенный на ОУ. Полюс может находиться на достаточно низкой частоте,
например 10 Гц для ОУ 741. Соответственно, на этой частоте происходит спад −3 дБ амплитудночастотной характеристики ОУ при разомкнутой петле внешней обратной связи. Частотная
компенсация обеспечивает безусловную стабильность ОУ в широком диапазоне условий и тем
самым упрощает его применение.
Цепи смещения выхода
Часть схемы, обведенная зеленой линией, предназначена для правильного смещения
транзисторов выходного каскада. Эта часть схемы представляет собой двухполюсник,
поддерживающий постоянную разность потенциалов на своих выводах вне зависимости от
протекающего тока (в основе — умножитель напряжения база-эмиттер). Фактически, это аналог
стабилитрона, выполненный на транзисторе Q16. Если считать ток базы транзистора Q16 равным
нулю, а напряжение база-эмиттер равным 0.625 В (типичное напряжение база-эмиттер для
биполярных транзисторов), то ток, текущий через резисторы 4.5 kΩ и 7.5 kΩ будут одинаковы, а
напряжение на резисторе 4.5 kΩ составит 0.375 В. Таким образом, напряжение на всем
двухполюснике будет равно 0.625 + 0.375 = 1 В. Это напряжение поддерживает выходные
транзисторы в чуть открытом состоянии, что уменьшает искажения типа «ступенька».
Поддержание напряжения смещения путем умножения напряжения база-эмиттер
примечательно тем, что при изменениях температуры напряжения база-эмиттер меняются
одновременно и у смещаемого каскада, и у цепи смещения, то есть температурно-зависимые
эффекты взаимно вычитаются. Это обстоятельство значительно улучшает термостабильность
режима смещаемых транзисторов, особенно в интегральных схемах, где все транзисторы имеют
одинаковую температуру (поскольку находятся на одном кристалле).
20
В некоторых усилителях, выполненных на дискретных компонентах, функцию смещения
выходных транзисторов выполняют последовательно включенные полупроводниковые диоды
(обычно два диода).
Выходной каскад
Выходной каскад (обведен голубой линией) класса AB — двухтактный эмиттерный
повторитель (Q14, Q20), смещение которого устанавливается умножителем напряжения Vbe (Q16
и резисторы, соединенные с его базой). На выходной каскад подается сигнал с коллекторов
транзисторов Q13 и Q19. Диапазон выходных напряжений ОУ примерно на 1 В меньше, чем
напряжение питания; это обусловлено падением напряжения на полностью открытых
транзисторах выходного каскада.
Резистор сопротивлением 25 Ω в выходном каскаде служит датчиком тока. Этот резистор
совместно с транзистором Q17 ограничивает ток эмиттерного повторителя Q14 на уровне
примерно 25 мА. Ограничение тока в нижнем плече (транзистор Q20) двухтактного выходного
каскада осуществляется путем измерения тока через эмиттер транзистора Q19 и последующего
ограничения тока, текущего в базу Q15. В более новых вариантах схемотехники ОУ 741 могут
использоваться несколько иные методы ограничения выходного тока.
1.12. ИНТЕГРАЛЬНЫЕ ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
Операционным усилителем принято называть интегральный усилитель постоянного тока с
большим коэффициентом усиления, имеющий симметричный вход и несимметричный выход.
Термин операционный усилитель (ОУ) первоначально относился к классам усилителей,
способных выполнять различные математические операции за счет использования отрицательной
обратной связи с соответствующими передаточными характеристиками.
В настоящее время ОУ выполняется, как правило, в виде монолитных интегральных
микросхем и по своим размерам и цене практически не отличаются от отдельно взятого
транзистора. Благодаря практически идеальным характеристикам ОУ, реализация различных схем
на их основе оказывается значительно проще, чем на отдельных транзисторах.
Чтобы определить, какой тип ОУ подходит для конкретного случая его применения,
необходимо знать его основные характеристики, а для некоторых случаев необходимо и знание
внутренней структуры. Для полного описания прибора необходимо знать более 30 электрических
параметров. Однако для упрощения расчета и анализа схем пользуются понятием «идеального»
ОУ. Идеальный ОУ имеет следующие свойства: собственные значения коэффициента усиления и
входного сопротивления стремятся к бесконечности, выходное сопротивление стремится к нулю,
высокочастотный спад амплитудно-частотной характеристики имеет скорость не более 20 дб/дек.
Отметим важные правила, которые определяют поведение ОУ, охваченного петлей обратной
связи.
1. Выход ОУ стремится к тому, чтобы разность напряжений между его входами была равна
нулю. Это правило не означает, что ОУ действительно изменяет напряжение на своих входах. Это
невозможно. ОУ «оценивает» состояние входов и с помощью внешней схемы обратной связи
передает напряжение с выхода на вход, так что в результате разность напряжений между входами
стремится к нулю.
Второе правило, которое широко используется при анализе схем на ОУ, связано с малым
потреблением входного тока (например, ОУ К140УД7 имеет входной ток 0,08 мкА, а ОУ с
полевыми транзисторами на входе имеют входные токи утечки единицы пикоампер).
2. Входы ОУ не потребляют ток в цепи источника сигнала. Эти правила справедливы для
любого ОУ при условии, что входы не перегружены.
При проектировании усилительных устройств на ОУ необходимо помнить, что обратная связь
должна быть всегда отрицательной (т. е. нельзя путать инвертирующий и не инвертирующий
входы), причем в схеме ОУ обязательно должна быть предусмотрена цепь обратной связи по
постоянному току. В противном случае ОУ обязательно попадает в режим насыщения.
Интегральные ОУ представляют собой схему с двумя входами и несимметричным выходом.
Кроме информационных выводов интегральные ОУ обычно имеют специальные выводы для
21
подключения напряжения источника питания, цепей балансировки и коррекции амплитудночастотной характеристики
Первые ОУ (например, К140УД1, К140УД5, К153УД1 и т. д.) для получения высокого
коэффициента усиления имели три каскада усиления, в которых в качестве нагрузки применялись
резисторы. Применение p-n-p транзисторов в качестве активной нагрузки позволило не только
получить большой коэффициент усиления, но и существенно упростить схему ОУ
Двухкаскадные схемы ОУ работают с меньшими токами питания, имеют повышенный
коэффициент усиления, малые входные токи, могут устойчиво работать как при малых (±ЗВ), так
и при больших (±15В) напряжениях питания, сохраняя при этом высокий коэффициент усиления и
амплитуду выходного сигнала, пропорциональную питающим напряжениям. Двухкаскадная
структура ОУ требует применения лишь одного конденсатора для коррекции АЧХ, что дает
возможность осуществлять внутреннюю коррекцию.
1.13. Основные параметры ОУ
Реальный ОУ, выполненный по полупроводниковой технологии в виде интегральной схемы,
имеет характеристики, отличающиеся от идеальных. В результате при построении узлов на базе
ОУ возникают погрешности, которые тем меньше, чем ближе параметры реального ОУ к
идеальному. Знание основных параметров ОУ позволяет разработчикам проектировать схемы
даже без макетирования, предотвращать работу
ОУ в недопустимом режиме и уменьшать
вероятность отказа.
Рассмотрим основные параметры ОУ.
1. Коэффициент усиления без обратной связи (К). Обычно коэффициент усиления ОУ лежит в
пределах от десятков тысяч до сотен тысяч и выше и существенно зависит от частоты входного
сигнала. Обычно в справочниках приводят графики зависимости коэффициента усиления при
разомкнутой обратной связи от частоты в логарифмическом масштабе. Такие характеристики
называются логарифмическими амплитудно-частотными характеристиками (ЛАЧХ) ОУ.
Разработчика аппаратуры обычно интересуют два параметра скорректированной ЛАЧХ:
координаты точек ее излома и частота f1, при которой значение коэффициента усиления
уменьшается до единицы.
2. Напряжение смещения (Uсм). В реальной схеме на ОУ при отсутствии входного сигнала на
выходе появляется некоторое напряжение. Величина этого выходного напряжения, приведенная
ко входу, и называется напряжением смещения (т.е. Uсм=Uвых/Кос). Обычно Есм составляет
несколько милливольт. Напряжение смещения ОУ обусловлено, прежде всего, наличием разности
напряжений Uбэ входных транзисторов, а также разностью их входных токов за счет различного
значения β транзисторов.
Большинство ОУ имеет внешние выводы, к которым подсоединяется соответствующее
переменное сопротивление для установки Uвых=0, при Uвх=0. Этот процесс называется
балансировкой ОУ. В справочнике также указывается временной и температурный дрейф Uсм,
который необходимо учитывать при усилении электрического сигнала, равного единицы
милливольт. Если же уровень входного сигнала составляет десятые доли вольта или единицы
вольт, то наличие входного смещения и его дрейф не создает проблем.
3. Входные токи смещения. В реальных ОУ на оба входа поступают малые, но не нулевые
постоянные токи, которые необходимы для работы входного каскада на биполярных транзисторах.
Среднее значение двух входных токов называется средним входным током. Из-за того, что
входные токи не равны нулю, существуют небольшие дополнительные напряжения либо на
сопротивлениях источника сигнала, либо на резисторах обратной связи. Увеличение
сопротивления источника сигнала и обратной связи приводит к увеличению ошибок, связанных с
этими токами. В большинстве схем на ОУ для уменьшения влияния входных токов включают
внешние элементы.
4. Разность входных токов (ток сдвига). В отличие от входного тока смещения разность
входных токов обусловлена неточным согласованием коэффициента усиления по току входных
транзисторов. В результате, даже при наличии на входах источников с одинаковыми внутренними
сопротивлениями, падения напряжения на входах ОУ будут разными и, следовательно, между
22
входами будет существовать разность напряжений. Величина этой разности напряжений прямо
пропорциональна внутреннему сопротивлению источника сигнала.
5. Входное сопротивление Rвх — сопротивление усилителя по отношению ко входному
сигналу. Типовые значения входных сопротивлений ОУ, согласно паспортным данным, имеют
порядок 0,1…1 мОм для ОУ на биполярных транзисторах и 100 мОм для ОУ с входными цепями
на полевых транзисторах. В ОУ, как и в ДУ, различают дифференциальное и синфазное входные
сопротивления.
6. Выходное сопротивление Rвых — внутреннее сопротивление усилителя без обратной связи, о
котором можно судить по напряжению на его выходе. Для ОУ К140УД7 оно равно
приблизительно 75 Ом, а для некоторых маломощных ОУ может достигать и нескольких кОм.
Обратная связь по напряжению делает Rвых пренебрежимо малым; поэтому большее значение
имеет максимально допустимый выходной ток.
Отмеченные выше параметры ОУ отражены на макромодели, представленной на рис. 5.2.
7. Коэффициент влияния нестабильности источника питания на выходное напряжение.
Показывает изменение выходного напряжения при изменении напряжения питания (+Е1 и –Е2
одновременно) на 1В.
8. Максимальная скорость нарастания выходного напряжения (В/мкс). Скорость нарастания
определяется как максимальная скорость изменения выходного напряжения во времени V=(Uвых/
t)maх.
Выходное напряжение ОУ не может изменяться мгновенно при подаче на вход
быстроизменяющегося сигнала из-за своих внутренних емкостей. Эти емкости надо успеть
зарядить, но скорость их заряда ограничена, а тем самым ограничена и скорость изменения
выходного напряжения.
Uвхвх
+
Uвхсм
+
Iвхвх
Uвхвх -
Iвхвх
-
+
Rвхвх
+
Rвхвх
-
Rвхвх
-
К(Uвх - Uвх )Uвхвх - Uвхвх )
Rвхвых
Рис. 5.2. Макромодель ОУ
Скорость нарастания отличается от частотных искажений. Частота среза — это ограничение,
относящееся к усилению слабых сигналов, в то время как скорость нарастания — это способность
усилителя отрабатывать без искажений большие сигналы. Эта последняя способность зависит и от
частоты выходного напряжения.
Если требуется использовать полную полосу пропускания усилителя, то приходится иметь
достаточно малое выходное напряжение, чтобы избежать превышения скорости нарастания. Для
соблюдения этого правила надо знать, как связаны частота выходного напряжения и скорость
нарастания.
Для синусоидального сигнала мгновенное значение напряжения можно записать в виде
U=Umsin(2ft), где Um — амплитуда сигнала. Скорость нарастания определится выражением
V=(Uвых/ t)maх, поэтому продифференцируем мгновенное значение напряжения во времени и
получим скорость его изменения dU/dt =2fUmcos(2ft). Представляет интерес значение (dU/dt)max,
которое функция dU/dt принимает при прохождении сигнала через нуль, если сигнал имеет
синусоидальную форму. В точке пересечения нулевого уровня выполняется условие cos(2ft)=1;
следовательно, для определения Um и f получим уравнение
(dU/dt)max = 2fUm = V.
Скорость нарастания ограничивает амплитуду синусоидального выходного сигнала при
превышении некоторой критической частоты.
9. Предельно допустимые значения. Сюда относятся такие параметры, как максимальная
рассеиваемая мощность, рабочий диапазон температур, максимальное напряжение питания,
23
максимальная разность входных напряжений (между входами ОУ), максимальное напряжение
синфазных входных сигналов.
10. Коэффициент ослабления синфазного сигнала. Характеризует способность ослаблять
сигналы, приложенные к обоим входам одновременно.
Ряд изготовителей включает в спецификацию своих ОУ графики многих параметров. Сюда
могут относиться зависимости Uвых mах от сопротивления нагрузки, напряжения источника питания,
температуры. Внимательное изучение спецификаций ОУ есть необходимая предпосылка для их
успешного использования.
1.14. Применение операционных усилителей
ОУ находят широкое применение для усиления постоянных и переменных напряжений и
токов. В зависимости от того, на какой вход ОУ подан входной сигнал, различают инвертирующее
и неинвертирующее включение ОУ.
На рис. 5.3, а приведена схема инвертирующего усилителя, в которой используется
параллельная обратная связь по напряжению.
Будем полагать, что ОУ обладает свойствами идеального ОУ. Основным видом ООС является
параллельная отрицательная обратная связь по напряжению с включением дополнительного
сопротивления. Обобщенная схема ОУ с ООС представлена на рис.4
Рис.4
Учитывая виртуальные нули ОУ, имеем:
Отсюда
.
Таким образом, коэффициент передачи схемы равен
.
Он определяется только внешними сопротивлениями; следовательно, можно реализовать любое
заданное значение, поэтому этот тип схемы называется инвертирующим масштабным усилителем.
В реальном ОУ во входных цепях протекают небольшие токи. Из-за того, что входные токи не
равны нулю, они создают дополнительное напряжение на резисторах, подключенных к
инвертирующему входу. Для уменьшения влияния входных токов в схеме рис. 5.3, а включен
резистор между неинвертирующнм входом и общей шиной. Проведем оценку величины
сопротивления этого резистора. Предположим, что входные токи ОУ одинаковы и равны Iвх.
Падение напряжения на резисторе R2 за счет входного тока Uни = –IвхR2.
Так как усилитель охвачен отрицательной обратной связью, то Uи = Uни, тогда
Iг = (Uг+IвхR2)/R1.
Ток через резистор Rос
Iос = Iг – Iвх
24
Rк1 A
Uвыхг
Iг
Iвх
Rкос
Rк1
Rкос
Uвыхвых
Rк2
Iвх
Rк1
Iо
с
Uвыхвых
Uвыхг
Uвых1
Rк2
Uвых2 Rк3
Uвых3
Rк2
а)
Uвыхвых
Rк4
Rкос
б)
в)
Rк2
nRк1
Uвыхвх1
Rк1
Rк1
DA1
Rк2
DA2
Rк1
Uвыхвых
Uвыхвых
Uвыхвх2
Rк2
Uвыхвх1
nRк2
д)
Uвыхвх2
г)
Рис. 5.3. Схема включения ОУ: а — инвертирующий усилитель; б — неинвертирующий усилитель; в —
сумматор; г — дифференциальный усилитель на одном ОУ; д — дифференциальный усилитель на двух ОУ
Из второго закона Кирхгофа следует, что
R
R R1
U вых U и I ос Rос ос U г Rос – ( ос
)R2 I вх
R1
R1
Из полученного выражения видно, что если сопротивление резистора R2=R1||Rос, то на выходе
ОУ не возникает искажений за счет входного тока. Напряжение на инвертирующем входе ОУ в
схеме рис. 5.3, а
U и U вых / К К ос U г / К
Если КосRос/R1<<К (т. е. в усилителе применена глубокая отрицательная обратная связь), то
напряжение Uи стремится к нулю. Точку А называют потенциально заземленной точкой, потому
что се потенциал равен потенциалу земли (общей шины).
Инвертирующий сумматор с заданным весовым коэффициентом
Рис.5
Так как ОУ работает в линейном режиме, то для определения Uвых может быть использован
метод суперпозиции: можно Uвых получить как сумму Uвых,n .Учитывая тот факт, что входной ток
ОУ равен нулю, имеем
, Таким образом,
Сумматор можно было бы выполнить и без применения ОУ. Однако в этом случае результат
зависел бы от сопротивления нагрузки, а Uвых получилось бы значительно меньшим любого из
Uвх.
Неинвертирующий усилитель
(Обобщенная схема 2)
Рис. 6
25
Эта схема называется неинвертирующим масштабным усилителем. Так как здесь напряжение
обратной связи подводится к инвертирующему входу, а сигнал подается на неинвертирующий
вход, входное сопротивление схемы оказывается очень высоким.
Неинвертирующий повторитель
Рис. 7
Здесь
. Эта схема обладает достоинствами идеального повторителя напряжения,
имеющего очень высокое входное и очень низкое выходное сопротивления.
Вычитатель
Рис. 8
Следовательно,
, т.е. схема выполняет операцию вычитания.
Линейная комбинация входных сигналов.
В некоторых случаях необходимо складывать и вычитать сигналы с различными весовыми
коэффициентами. Комбинируя схемы вычитателя и сумматора можно получить соответствующие
устройства (см. Рис. 9).
Рис. 9
что означает линейную комбинацию сигналов с заданными коэффициентами.
26
1.6. Схемы на ОУ с конденсаторами в цепи обратной связи
Широкое применение находят также устройства, и которых используются ОУ с реактивными
элементами в цепи обратной связи. На рис. 5.8. а приведена схема простейшего интегратора.
Чтобы понять, почему такая схема способна интегрировать, запишем выражение для тока,
протекающего через конденсатор:
dU c
I c C
.
dt
Если ОУ близок к идеальному с током Iвх = 0 и значением К настолько большим, что потенциал
инвертирующего входа можно считать равным нулю, то IR =- IC .Так как Uc= - Uвых, то можно
записать
dU вых
I c C
U вх / R I R .
dt
Разрешая это выражение относительно dUвых, находим
dUвых = (–1/RC)Uвх dt,
а интегрируя его, получаем
t
1
U вых
U вх dt .
RC
0
Пределами интегрирования здесь являются моменты времени, соответствующие началу и
концу интервала времени наблюдения сигнала. Для скачка входного сигнала Uвх интеграл является
линейной функцией времени:
U вых U c
1
U вх t
RC
Этим свойством интегратора широко пользуются при проектировании
генераторов линейно изменяющегося напряжения.
C
Uвыхвх
5В
Uвыхг
Uвыхвых
Rк
1.25В
Uвыхвых
t
t1
t2
t3
t4
t1
t2
t3
t4
t
-1.25В
Rк1
a)
прецизионных
в)
- 5В
б)
Рис. 5.8. Применение ОУ для интегрирования входного сигнала: а — интегратор на ОУ на ОУ; б —
входной сигнал интегратора; в — выходной сигнал интегратора
Пример. В схеме генератора R=10 кОм, С=0,1 мкф. На вход ОУ подаются прямоугольные
импульсы в виде меандра с частотой 1 кГц и амплитудой 5 В. (см. рис. 5.8 б). Определить, какое
будет выходное напряжение?
Решение. Поскольку сигнал периодический, для описания выходного напряжения достаточно
рассмотреть только один полный период, например, длительностью t3 - t1. Имеем Uвх = 5B при t1 <
t < t2, Uвх = - 5В при t2 < t < t3.
Эту функцию можно интегрировать на каждом из ее полупериодов. Для описания выходного
сигнала достаточно выяснить его форму и значение напряжений на концах каждого полупериода.
Так как Uвх в течение полпериода постоянно, то
t
1
U вых U вых 0
Udt
RC
0
представляет собой наклонную прямую на каждом полупериоде.
Напряжение на конденсаторе за первый полупериод, т. е. в интервале между t1 и t2, изменяется
на величину:
U вых
5B
(t 2 t1 ) 2,5B
10 K 0,1 мкФ
Аналогично находим изменение напряжения на выходе за второй полупериод между t3 и t2
27
U вых
5B
(t 3 t 2 ) 2,5B
10 K 0,1 мкф
В установившемся режиме, на выходе получится симметричный двуполярный сигнал (без
постоянной составляющей). Поскольку скорость изменения выходного напряжения одинакова по
абсолютной величине и противоположна по знаку, то на границах полупериодов выходное
напряжение будет принимать значение 1.25В. Полученный выходной сигнал показан на рис. 5.8,
в.
Если последовательно с конденсатором обратной связи включить сопротивление (рис. 5.9 а), то
выходное напряжение окажется линейной функцией входного напряжения и интеграла по времени
от входного напряжения. Такая схема фактически объединяет интегратор и усилитель.
Напряжение на ее выходе имеет вид
Uвых = –(Rос/R1)Uвх –1/(R1C) Uвхdt.
Заметим, что интегратор-усилитель может иметь более одного входа.
Разностный интегратор (рис. 5.9 б ) формирует интеграл по времени от разности двух
сигналов. Его схему можно получить, если на рис. 5.3 г вместо резисторов nR1 и nR2 включить
конденсаторы С1= С2 = С. Выходное напряжение в этой схеме имеет вид
Uвых = (1/RC)(U2 – U1)dt.
Количество входов интегратора не обязательно равно одному. Схема суммирующего
интегратора с n входами показана на рис. 5.9 в. Из рисунка видно, что
iC = iR1 + iR2 + iRn,
так что
-С(dUвых/dt) = (U1 /R1) + (U2 /R1) + + (Un /Rn).
При R1 = R2 = Rn =R имеем
dUвых/dt = –(U1+ U2 + +Un) /CR.
Проинтегрировав это равенство, получим
U вых
1
(U 1 U 2 U n )dt .
RC
Rкос
C
С
Uвыхвх Rк1
Uвых1
Rк
Uвыхвых
Uвых1
Rк1
Uвых2
Rк2
Uвых3
Rк3
C
Uвыхвых
Uвыхвых
Uвых2 Rк
Rк2
C
Rк
а)
б)
в)
Рис. 5.9. Разновидности интеграторов на ОУ: а — интегратор усилитель, б — разностный интегратор,
в — суммирующий интегратор
Любой интегратор, предназначенный для интегрирования в течение длительного времени,
необходимо периодически сбрасывать в некоторое заданное начальное состояние (например,
нулевое). Кроме того, желательно иметь возможность останавливать на некоторое время
изменение выходного напряжения (режим фиксации); это дает возможность последовательно
считывать несколько значений выходного напряжения и гарантирует неизменность выходного
напряжения в течение времени, необходимого для такого считывания. Трехрежимный интегратор,
схема которого приведена на рис. 5.10 обеспечивает возможность производить интегрирование,
фиксировать выходной сигнал и периодически сбрасывать интегратор в исходное состояние.
Схема имеет следующие режимы:
Рабочий — собственно интегрирование.
Фиксации (сравнения) — в течение определенного интервала времени выходной сигнал не
меняется.
Установка начальных условий (или сброс) — интегратор возвращается в исходное состояние.
В рабочем режиме
интегрирование производится обычным образом и в качестве
трехрежимного интегратора может быть использован любой из описанных выше интеграторов.
При большой длительности интегрирования накапливается большая ошибка за счет
28
интегрирования входного тока, напряжения смещения и тока утечки конденсатора. Максимальное
время непрерывной работы интегратора определяется величиной суммарной ошибки, допустимой
в данном конкретном применении. В рабочем режиме сигнал на выходе схемы рис. 5.10 имеет вид
Uвых=–(1/R1C) U1 dt + Uнс.,
где Uнс – значение напряжения, которое выходное напряжение интегратора принимает в
режиме сброса. Это напряжение сброса равно
Uнс=–(Rос/R2)U2.
Напряжение сброса равно нулю, если U2= 0. Максимальное время, в течение которого
интегратор может непрерывно работать, можно найти следующим образом. Так как С=It/U, а t =
CU/I, то имеем
t раб.мак.=CUош / Iвх,
где Iвх — ток смещения ОУ, Uош — максимально допустимое напряжение ошибки за счет
входного тока.
В режиме выдержки (хранения) (K1, K2 разомкнуты) входное сопротивление отсоединяется от
интегратора. При этом напряжение на конденсаторе остается практически постоянным, так как
входное сопротивление ОУ велико. Однако, это напряжение не будет удерживаться на
конденсаторе бесконечно долго, потому что ни входное сопротивление усилителя, ни
сопротивление утечки конденсатора не бесконечны. Если ток утечки конденсатора достаточно
мал, то напряжение на конденсаторе будет уменьшаться по экспоненциальному закону с
постоянной времени = СRвх ус.
Uвых2
Rк2
Rкос
К2
C
Rк1
Uвых1
Uвыхвых
К1
Рис. 5.10. Трехрежимный интегратор
В режиме сброса конденсатор вынужден зарядиться или разрядиться до напряжения,
определяемой цепью обратной связи Rос и R2. Чтобы сброс происходил достаточно быстро,
резисторы выбираются настолько малой величины, насколько позволяет усилитель. В качестве
ключей обычно применяют ключи на биполярных или полевых транзисторах.
Погрешность интегратора в первую очередь определяется таким параметром ОУ, как
напряжение смещения и входной ток. Напряжение смещения интегрируется как ступенчатая
функция, что дает дополнительный линейно нарастающий (или спадающий) выходной сигнал,
полярность и наклон которого определяется соответственно полярностью и величиной Uсм. Ток Iвх
течет через конденсатор обратной связи, что также приводит к появлению наклонного выходного
сигнала. В результате действия этих эффектов (они никогда не компенсируют друг друга
полностью, но могут складываться и вычитаться) конденсатор обратной связи через некоторое
время неизбежно зарядится до максимально возможного выходного напряжения усилителя. Такое
постоянное нарастание заряда на конденсаторе накладывает ограничение на интервал времени, в
течение которого может быть осуществлено интегрирование с достаточной точностью. Кроме
того, Uсм2–Uсм1 добавляется к напряжению на конденсаторе, т. е. к выходному напряжению. В
итоге выражение для Uвых интегратора принимает вид
U вых
1
R1C
U
вх
dt
1
R1C
U
см
dt
1
C
I
вх
dt U см
Последние три члена в правой части приведенного равенства соответствуют указанным выше
ошибкам, а первый — описываемому полезному выходному сигналу. Для уменьшения ошибки
интегрирования необходимо использовать ОУ с малыми значениями Iсм и Uсм, большим значением
К, периодически разряжать конденсатор до некоторого заранее выбранного значения.
Операцию дифференцирования выполняет схема, приведенная на рис. 5.11.
Она создает выходное напряжение, пропорциональное скорости изменения входного. При
дифференцировании входного сигнала усилитель должен пропускать только переменную
составляющую входного напряжения и коэффициент усиления дифференциатора должен
возрастать при увеличении скорости изменения входного сигнала.
29
Выполнить это требование позволяет использование в качестве входного элемента ОУ
конденсатора С. Ток конденсатора
dU вх
1с=С
.
dt
IRк
Uвыхвх
Rк
C
Uвыхвых
Iс
Rк1
Рис. 5.11. Дифференциатор на ОУ
Напряжение Uc равно входному напряжению Uвх, так как потенциал инвертирующего входа
близок к нулю. Ели предположить, что ОУ идеален, то ток через Rос можно считать равным току
через конденсатор, т. е. IR=IC. Но Uвых = –RIR =–ICR, поэтому
Uвых = –RC dUвх/dt.
С увеличением частоты входного сигнала уменьшается реактивное сопротивление ХС. При
этом возрастает коэффициент усиления дифференциатора по отношению к высокочастотным
составляющим на входе. Однако это возрастание коэффициента усиления ограничивается
частотными свойствами ОУ.
Особенностью схемы дифференциатора является также ее склонность к самовозбуждению, что
требует принятия мер для динамической стабилизации дифференциатора.
Представляет опасность и значительное увеличение усиления дифференциатора,
обусловленное свойством входной цепи на достаточно высоких частотах. В результате
высокочастотные составляющие спектра собственного шума ОУ после значительного усиления
накладываются на полезный сигнал и искажают его. Поэтому на практике применяют
модифицированную схему, которая выполняет функцию дифференцирования входных сигналов
до частоты 1 = 1/(R1C1), выполняет функцию усилителя в диапазоне частот от 1 = 1(/R1C1), до 2
= 1/(R2C2) и является интегратором на частотах выше 2.
Рис. 5.12. Применение ОУ для дифференцирования входного сигнала: а — схема дифференцирующего
устройства, применяемого на практике; б — логарифмическая амплитудно-частотная характеристика
дифференциатора
1
1
1
1
; 1
; 2
; 3
R2C1
R1C1
R2C2
R1C2
На рис. 5.12 б приведена логарифмическая амплитудно-частотная характеристика ОУ,
которая обеспечивает нормальную работу рассматриваемой схемы в режимах дифференциатора,
усилителя и интегратора. Это позволяет устранить влияние собственной полосы пропускания ОУ
на участке частот, где осуществляется интегрирование.
1.7. Логарифмические преобразователи на ОУ
Логарифмический преобразователь на ОУ представляет собой электронное устройство, в
котором выходное напряжение пропорционально логарифму входного сигнала. Для получения
логарифмической зависимости напряжения на выходе ОУ от напряжения на его входе
необходимо в цепь обратной связи ОУ включить элемент с логарифмической характеристикой.
Таким элементом может быть полупроводниковый диод (рис. 5.13, а) или биполярный транзистор
в диодном включении (рис. 5.13, б). Из теории полупроводников известно, что ток через
полупроводниковый диод
30
Uд
I д I 0 e m T 1 ,
где I0 – статический обратный ток, 1 m 2 — корректирующий множитель.
В рабочей области, где выполняется условие Iд I0 можно считать с достаточной точностью
Uд
mT
Uд=m T ln(Iд/I0).
I д I 0 e ,
Последнее выражение и является искомой логарифмической функцией. При этом для схемы
рис. 5.13, а:
U
U
U вых m T ln вх m T ln вх ln I 0 .
R1
R1 I 0
Выходное напряжение определяется прямым падением напряжения на диоде. Диапазон
возможных рабочих токов ограничен двумя специфическими свойствами диодов — их омическим
сопротивлением, на котором при большом токе падает значительное напряжение, приводящее к
искажению логарифмической характеристики, а также зависимостью множителя m от тока.
Поэтому удовлетворительная точность может быть получена при изменении входного тока в
пределах двух декад.
Влияние множителя m можно исключить, применив вместо диода транзистор (рис.5.13, б). Для
коллекторного тока транзистора (при Uкб = 0) справедливо соотношение
I к I э0 eU бэ / mT 1 .
VT
VD
Uвыхвх
Rк
Uвыхвх
Rк1
Rкэ
Uвыхвых
Uвыхвых
Rк2
Rк1
а)
б)
Рис. 5.13. Логарифмический усилитель: а —логарифмический усилитель с диодом в цепи обратной
связи;
б — логарифмический усилитель с транзистором в цепи обратной связи
Зависимости и m от тока взаимно компенсируется. Тогда
I к I э 0 eUбэ / T ;
Uбэ T ln(Iк/Iэ0).
Выходное напряжение логарифмического усилителя
U
U вых T ln вх
R1 I э 0
не зависит от коэффициента m, а его динамический диапазон рабочих токов при надлежащем
выборе транзисторов может составлять 9 декад.
Рассмотренные схемы, хотя и являются работоспособными, не содержат устройств
температурной компенсации или коррекции для устранения влияния теплового тока I0 и
температурного потенциала T. Последние вносят значительную нестабильность в работу
логарифмического усилителя. Так, при изменении температуры от 20 до 50 градусов T
увеличивается на 10 %, а ток I0 — примерно в 10 раз.
Рассмотрим теперь схему 5.14, в которой можно существенно уменьшить влияние тока I0. В
этой схеме дифференциальный усилитель на двух транзисторах VT1 и VT2 служит для
выполнения операции логарифмирования. На основании второго закона Кирхгофа
U1 + Uбэ1 – Uбэ2 = 0.
Rк1
VT1
VT2
Rк
Uвыхвх
Rк2
Uвыхоп
Rк3
Uвыхвых
Rк4
Uвых1
31
Рис. 5.14. Логарифмический усилитель с компенсацией теплового тока
Запишем выражения передаточных характеристик транзисторов VT1 и VT2
I к1 I э0 eUбэ1 / T ,
I к 2 I э 0 eUбэ 2 / T .
Тогда
Iк2
e
I к1
U бэ 2 U бэ1
T
e
U1
T
I
U 1 T ln к 2 .
I к1
,
Из принципиальной схемы получим следующие соотношения:
U вх
U оп
R4
Iк1 =
;
Iк2 =
;
U1 = Uвых
.
R1
R2
R3 R4
Резистор R4 в данной схеме не должен быть высокоомным.
В результате получаем
R R4
R R4 U вх R2
.
U вых 3
U 1 T 3
ln
R4
R4
U оп R1
Компенсация температурной зависимости T осуществляется с помощью резистора R4, который
должен иметь положительный температурный коэффициент, равный 0,3% на один градус.
Если в схеме логарифмического усилителя (рис. 5.13, а) поменять местами включение диода и
резистора, то получим схему антилогарифмического усилителя. В такой схеме при наличии
входного напряжения соответствующей полярности через диод будет протекать ток по известному
уже закону, а выходное напряжение
Uвых = -IдR = - I0R exp(Uвх /T).
Как и в случае логарифмического усилителя для улучшения температурной стабильности и
устранения влияния входных токов используется дифференциальная схема включения
транзисторов как показано на рис. 5.15.
Iк2
VT2
Rк2
Uвыхопор
Rк1
Iк1
VT1
Uвых1
Rк5
Rк3
Uвыхвых
Rк4
Uвых1
Uвыхвх
Рис. 5.15. Антилогарифмический преобразователь с температурной компенсацией теплового тока I0
В данной схеме, как и в предыдущей,
U
1
I к1
T
e ,
Iк2
где Iк1=Uвых/R1;
Iк2 = Uоп/R2;
U1 = UвхR4/(R3 + R4).
Таким образом, отношение токов
I к 1 U вых R2
U
R4
,
exp вх
I к 2 U оп R1
T R3 R4
а выходное напряжение антилогарифмического преобразователя
U вх R4
R
U вых U оп 1 exp
R2
( R3 R4 ) T
не зависит от тока Iэ0 , если транзисторы имеют одинаковые параметры.
Перемножитель.
Использование схем рис. 14 а,б позволяет выполнять такое казалось бы нелинейное
преобразование, как перемножение. На рисунке 15 показана блок-схема такого устройства.
32
Рассмотренные преобразователи электрических сигналов на ОУ находят широкое применение
в схемах умножителей электрических сигналов, которые, как и ОУ находят широкое применение
для преобразования электрических сигналов.
Источники тока, управляемые напряжением
Источники тока, управляемые напряжением, предназначены для питания нагрузки током, сила
которого не зависит от выходного напряжения ОУ и регулируется только входным напряжением
схемы. Такие источники применяются в измерительных схемах, например, при измерении
сопротивления, в электроприводе, если требуется стабилизировать вращающий момент
электродвигателя и др.
Идеальный преобразователь напряжение-ток имеет бесконечно большие входное и выходное
сопротивления.
Источники тока с незаземленной нагрузкой
В инвертирующем и неинвертирующем усилителе по резистору отрицательной обратной связи
протекает ток I2=U1/R1. Таким образом, этот ток не зависит от падения напряжения на резисторе
R2. Следовательно, оба этих усилителя можно использовать в качестве источников тока, в которых
вместо резистора обратной связи включена нагрузка (рис. 8).
Рис. 8. Источники тока с нагрузкой в цепи обратной связи
Поскольку дифференциальный коэффициент усиления ОУ KU имеет конечное значение,
входное дифференциальное напряжение Uд остается отличным от нуля. Для определения
выходного сопротивления источника тока на рис. 8а запишем:
I1 = I2 = (U1–Uд)/R1,
Uд = –(Uвых/KU),
U2= Uд – Uвых.
Отсюда получим следующее соотношение:
Таким образом, выходное сопротивление источника тока будет равно
Rвых = – (дU2/дI2) = KUR1. (7)
Оно пропорционально дифференциальному коэффициенту усиления ОУ. Выходное
сопротивление схемы на рис. 8б может быть рассчитано аналогично.
Рассмотренные источники тока обладают существенным недостатком. Ни к одному из зажимов
нагрузки этих источников тока не может быть приложен постоянный потенциал (в том числе и
нулевой), поскольку в противном случае либо выход, либо инвертирующий вход операционного
усилителя будет закорочен. Приведенные ниже схемы не имеют этого недостатка.
Источники тока с заземленной нагрузкой
Схемы источников тока этого типа приведены на Рис. 2.12.
33
На Рис. 2.12а изображена так называемая схема Хоуленда в типовой конфигурации. Принцип
ее действия состоит в том, что выходной ток измеряется по падению напряжения на резисторе R5.
Выходное напряжение ОУ устанавливается таким, что падение напряжения на резисторе R5
оказывается пропорциональным величине входного напряжения.
Если выбрать R1 = Rз, а R2 = R4, то выражение для выходного тока источника будет иметь вид:
Выполняя тонкую подстройку, например посредством регулировки R3, можно добиться.
практически бесконечного выходного сопротивления источника тока на низких частотах при реальных характеристиках операционного усилителя.
Можно усовершенствовать схему Хоуленда, включив между выходом схемы и резистором R4
буферный повторитель (см. Рис. 2.12б) [2.3]. При этом появится возможность регулировать
коэффициент передачи схемы изменением сопротивления резистора R5. Связь между входным
напряжением и выходным током с учетом (2.9) выражается формулой
Недостаток схем, приведенных на Рис. 2.12, состоит в том, что ток управляющего источника
напряжения зависит от сопротивления нагрузки. В результате полная балансировка источника
тока невозможна, если внутреннее сопротивление Rs, как, например, у стабилитронов, зависит от
тока.
Этого недостатка лишена схема, приведенная на Рис. 2.13.
Здесь входной резистор присоединен к виртуальному нулю. Другое достоинство этой схемы
состоит в отсутствии синфазного сигнала. Для расчета выходного тока в этой схеме используем
следующее соотношение:
из которого следует, что выходной ток не будет зависеть от выходного напряжения, если
выполняется условие
2.2.3. Инверторы сопротивления
Иногда возникает необходимость использования отрицательного сопротивления, например,
для компенсации потерь и повышения добротности колебательных контуров. Для обычного
двухполюсника направление тока и напряжения совпадают и его сопротивление положительное: R
= V/I. Если же в двухполюснике направления протекающего тока и приложенного напряжения не
совпадают, отношение V/I будет отрицательным. Говорят, что такой двухполюсник обладает
отрицательным сопротивлением. Физически это означает, что этот двухполюсник не рассеивает, а
34
отдает энергию во внешнюю цепь. Поэтому отрицательные сопротивления могут быть получены
только с применением активных схем, которые называют инверторами сопротивления. Схема
инвертора сопротивления на операционном усилителе приведена на Рис. 2.17.
Выходное напряжение идеального ОУ определяется как
На входах идеального операционного усилителя напряжения равны, т. е. V1 = V2, поэтому I2 =
—I1. Отсюда следует, что V1/I1 = — R2.
При выводе этих соотношений предполагалось, что схема находится в устойчивом состоянии.
Входной ток усилителя равен
Однако, поскольку операционный усилитель охвачен одновременно положительной и
отрицательной обратными связями, следует принять меры, чтобы выполнялись условия
устойчивости. Физический смысл условий устойчивости для схемы инвертора сопротивления с
идеальным ОУ при резистивных обратных связях заключается в том, что глубина положительной
обратной связи должна быть меньше, чем отрицательной. Для схемы на Рис. 2.17 это означает, что
сопротивление источника входного сигнала Rs должно быть меньше R2.
Измерительный усилитель на одном ОУ
В простейшем случае в качестве измерительного усилителя может быть использован ОУ в
дифференциальном включении (рис. 22). При выполнении условия R1/R2=R3/R4 усиление
дифференциального сигнала намного больше усиления синфазного сигнала и коэффициент
ослабления синфазного сигнала (КОСС) будет максимальным.
Рис. 22. Схема простейшего измерительного усилителя
Дифференциальный коэффициент усиления при выполнении указанного выше условия
Коэффициент усиления синфазного сигнала, обусловленный рассогласованием резисторов,
равен
Коэффициент усиления синфазного сигнала, обусловленный конечным значением КОСС
операционного усилителя, равен
Здесь КОСС выражается отношением, а не в децибелах.
Коэффициент ослабления синфазного сигнала всей схемы:
КОСС =КД/(КСФ1 + КСФ2).
35
Дифференциальное входное сопротивление:
Rвх.д=R1 + R3.
Поскольку, как это следует из (26), КСФ1 может принимать отрицательные значения и зависит
от сопротивлений резисторов схемы, подстройкой резистора R3 может быть достигнуто любое
сколь угодно большое значение КОСС, в соответствии с выражением (28).
Пример 1. Пусть в схеме на рис. 22 R1=R3=2 кОм,R4=200 кОм. Сопротивление резистора
R2отличается от номинального значения 200 кОм на 1% и составляет 198 кОм. Тогда
дифференциальный коэффициент усиления схемы равен 100, а К ОСС – 10100, что во многих
применениях недостаточно.
Эта простейшая схема имеет низкое входное сопротивление. Выходное сопротивление
источника сигнала влияет на величину дифференциального коэффициента усиления и на
коэффициент ослабления синфазного сигнала, что почти всегда требует точной настройки
параметров схемы. Для изменения коэффициента усиления нужно одновременно менять
сопротивления двух резисторов. Занимающая ведущее место в мире по выпуску измерительных
усилителей фирма Burr-Brown выпускает несколько моделей ИМС измерительных усилителей,
построенных по схеме на рис.22. Такие ИМС как INA133, INA143 имеют фиксированный
коэффициент усиления, задаваемый встроенными резисторами и высокое значение КОСС (до 86
дБ), достигаемое за счет лазерной подгонки. ИМС INA145, INA146 включают дополнительный
неинвертирующий усилитель, коэффициент усиления которого может задаваться внешними
резисторами. Микросхемы измерительных усилителей содержат цепи защиты входов,
допускающие, например, у INA146 синфазные и дифференциальные напряжения до 100
Пример 2. Пусть в схеме на рис. 23 R1= 1 кОм,R2 = R3 = 50 кОм, R4 = R6 = R7 = 10 кОм.
Сопротивление резистора R5 отличается от номинального значения 10 кОм на 1% и составляет 9,9
кОм. Тогда дифференциальный коэффициент усиления схемы равен 101, а К ОСС – 20200, что выше,
чем в предыдущем примере.
Измерительные усилители на трех ОУ выпускаются в виде ИМС с внутренними
согласованными резисторами (AD623, LMΩ363, ICL7605 и др.). Обычно они имеют выводы для
подключения внешнего резистора R1, которым задается дифференциальный коэффициент
усиления. Например, измерительный усилитель INA118 фирмы Burr-Brown имеет низкое
смещение нуля Uсм = 50 мкВ, широкий диапазон напряжений питания (1,35 ...18 В) и входных
напряжений (до 40 В), малый потребляемый ток – 0,35 мА и широкий диапазон коэффициентов
усиления (1 – 10000), устанавливаемых одним внешним резистором.
Uвых1
Uвыхвых1 Rк4
Rк4N
Rк1
Uвыхвых
Rк2
I
Rк3
Rк5
Uвых2
Rк5N
Uвыхвых2
Рис. 5.5. Дифференциальный усилитель на ОУ с высоким входным сопротивлением
В этой схеме неинвертирующие ОУ DA1 и DА2 параллельно включены в схему. Синфазные
напряжения пропускается этими усилителями без усиления и ослабления. Дифференциальный
усилитель на операционном усилителе DA3 подавляет синфазный сигнал. Одновременно он
усиливает поступающую на его входы разность входных сигналов. Определим выходное
напряжение в рассматриваемой схеме. Так как можно считать, что через резисторы R1, R2, R3
протекает один и тот же ток, то
U вых1 U 1 U 1 U 2 U 2 U вых 2
R1
R2
R3
.
Отсюда найдем
Uвых1 = U1(1 + R1/R2) – U2 R1/R2 + Ucc,
Uвых2 = U2(1 + R3/R2) – U1 R3/R2 + Ucc.
36
В этих уравнениях первое слагаемое представляет составляющую выходного напряжения,
обусловленную соответствующим входным напряжением U1 или U2 на неинвертирующих входах
усилителей. Второе слагаемое — составляющую выходного напряжения, определяемую
соответственно напряжениями U2 и U1 , приложенными к инвертирующим входам. Третье
слагаемое передается с Кu = 1.
Для данной схемы Uвых параллельно соединенных неинвертирующих усилителей при R1=R3=R
будет равно
Uвых=(UВЫХ2 –UВЫХ1)N = (1 + R3/R2+ R1/R2) (U2 – U1) N=(1+2R/R2)(U2 – U1) N.
Коэффициент усиления обоих каскадов в данной схеме
Кu=(1 + 2R/R2)N
и может регулироваться изменением сопротивления резистора R2. Недостаток данной схемы нелинейность при регулировке коэффициента усиления при помощи резистора R2.
37
Лекция 7
Активные фильтры. Основные понятия. Фильтры нижних частот (ФНЧ), фильтры верхних
частот (ФВЧ), полосовой фильтр (ПФ). Реализация фильтров на ОУ. Универсальное звено.
Методы аппроксимации. Денормирование и преобразование частоты. Реализация активных
фильтров на основе метода переменных состояния. Задачи оптимального синтеза. Гребенчатые
фильтры и фазовращатели.
Фильтры нижних частот
Схема простейшего фильтра нижних частот приведена на рис. 14. Передаточная функция
этого фильтра определяется выражением: W(s) = 1/(1+sRC).
Рис.14. Простейший фильтр нижних частот первого порядка
Заменив s на j, получим частотную характеристику фильтра. Для реализации общего
подхода целесообразно нормировать комплексную переменную s. Положим
S=s/c, где c - круговая частота среза фильтра. В частотной области этому соответствует
j =jj( /c).
Частота среза c фильтра на рис. 14 равна 1/RC. Отсюда получим S=jsRC и W(S)=1/(1+S).
Используя передаточную функцию для оценки зависимости амплитуды выходного сигнала
от частоты, запишем W(j)|2 =1/(1+2).
При >>1, т.е. для случая, когда частота входного сигнала >>c, |W(j)| = 1/. Это
соответствует снижению коэффициента передачи фильтра на 20 дБ на декаду.
Если необходимо получить более быстрое уменьшение коэффициента передачи, можно
включить n фильтров нижних частот последовательно. Передаточная функция такой системы
имеет вид:
где 1, 2 , ... , n - действительные положительные коэффициенты. Из этой формулы следует,
что |W(j)| ~ 1/n при >>1. Полюса передаточной функции (11) вещественные отрицательные.
Таким свойством обладают пассивные RC-фильтры n-го порядка.
Порядок фильтра определяет крутизну спада АЧХ за полосой пропускания: чем выше порядок,
тем круче спад АЧХ.
Соединив последовательно фильтры с одинаковой частотой среза, получим:
Этот случай соответствует критическому затуханию.
Передаточная функция фильтра нижних частот (ФНЧ) в общем виде может быть записана как
где с1, с2 , ... , сn - положительные действительные коэффициенты, K0 -коэффициент усиления
фильтра на нулевой частоте. Порядок фильтра определяется максимальной степенью переменной
S. Для реализации фильтра необходимо разложить полином знаменателя на множители. Если
среди нулей полинома есть комплексные, то рассмотренное ранее представление полинома (11) не
может быть использовано. В этом случае следует записать его в виде произведения квадратных
трехчленов:
1
где ai и bi - положительные действительные коэффициенты. Для полиномов нечетных порядков
коэффициент b1 равен нулю. Реализация комплексных нулей полинома на пассивных RC-цепях
невозможна. Применение индуктивных катушек в низкочастотной области нежелательно из-за
больших габаритов и сложности изготовления катушек, а также из-за появления паразитных
индуктивных связей. Схемы с операционными усилителями позволяют обеспечить комплексные
нули полиному без применения индуктивных катушек. Такие схемы называют активными
фильтрами. Рассмотрим различные способы задания характеристик ФНЧ. Широкое применение
нашли фильтры Бесселя, Баттерворта и Чебышева, отличающиеся крутизной наклона амплитудночастотной характеристики (АЧХ) в начале полосы задерживания и колебательностью переходного
процесса при ступенчатом воздействии. Амплитудно-частотные характеристики этих ФНЧ
четвертого порядка приведены на рис. 15.
Амплитудно-частотная характеристика фильтра Баттерворта имеет довольно длинный
горизонтальный участок и резко спадает за частотой среза. Переходная характеристика такого
фильтра при ступенчатом входном сигнале имеет колебательный характер. С увеличением
порядка фильтра колебания усиливаются.
Амплитудно-частотная характеристика фильтра Чебышева спадает более круто за частотой
среза. В полосе пропускания она, однако, не монотонна, а имеет волнообразный характер с
постоянной амплитудой. При заданном порядке фильтра более резкому спаду амплитудночастотной характеристики за частотой среза соответствует бoльшая неравномерность в полосельшая неравномерность в полосе
пропускания. Колебания переходного процесса при ступенчатом входном воздействии сильнее,
чем у фильтра Баттерворта.
Фильтр Бесселя обладает оптимальной переходной характеристикой. Причиной этого
является пропорциональность фазового сдвига выходного сигнала фильтра частоте входного
сигнала. При равном порядке спад амплитудно-частотной характеристики фильтра Бесселя
оказывается более пологим по сравнению с фильтрами Чебышева и Баттерворта.
Тот или иной вид фильтра при заданном его порядке определяется коэффициентами
полинома передаточной функции (13) фильтра.
Рис. 15. Амплитудно-частотные характеристики фильтров четвертого порядка. 1 - фильтр с
критическим затуханием; 2 - фильтр Бесселя; 3 - фильтр Баттерворта; 4 - фильтр Чебышева с
неравномерностью 3 дБ.
В таблице приведены стандартные значения коэффициентов для разных типов фильтров
2
Фильтры верхних частот
Используя логарифмическое представление, можно перейти от нижних частот к верхним,
зеркально отобразив амплитудно-частотную характеристику коэффициента передачи
относительно частоты среза, т.е. заменив на 1/ или S на 1/S. При этом частота среза остается
без изменения, а K0 переходит в Kбеск. Из выражения (13) при этом получим
Заграждающие (режекторные) фильтры
Для выборочного подавления составляющих определенных частот необходим фильтр,
коэффициент передачи которого на резонансной частоте равен нулю, а для нижних и верхних
частот имеет постоянное значение. Такой фильтр называется заграждающим. Для оценки
избирательности введем добротность подавления сигнала Q = fр/f, где f - полоса частот, на краях
которой коэффициент передачи падает на 3 дБ. Чем больше добротность фильтра, тем быстрее
возрастает коэффициент передачи при удалении от резонансной частоты.
Передаточную функцию заграждающего фильтра можно получить из передаточной функции
ФНЧ с помощью преобразования в частотной области заменой:
Здесь = 1/Q, как и ранее, нормированная полоса частот. В результате такого преобразования
АЧХ фильтра нижних частот из области 0 1 переходит в область пропускаемых частот
0 1заграждающего фильтра. Кроме того, она зеркально отображается в логарифмическом
масштабе относительно резонансной частоты. Для резонансной частоты = 1 значение
передаточной функции равно нулю. Как и в случае полосовых фильтров, при преобразовании
порядок фильтра удваивается.
Применив преобразование (19) к передаточной функции ФНЧ первого порядка (10),
получим:
Подставив j вместо S в выражение (20), получим частотную характеристику заграждающего
фильтра.
Полосовые фильтры
Аналогично, путем замены переменных, можно преобразовать амплитудно-частотную
характеристику фильтра нижних частот в амплитудно-частотную характеристику полосового
фильтра. Для этого в передаточной функции фильтра нижних частот необходимо произвести
следующую замену переменных:
В результате такого преобразования АЧХ фильтра нижних частот в диапазоне 0 1
переходит в правую часть полосы пропускания полосового фильтра (1макс). Левая часть
полосы пропускания является зеркальным отображением в логарифмическом масштабе правой
части относительно средней частоты полосового фильтра = 1. При этом мин = 1/макс. Рис. 16
иллюстрирует такое преобразование.
Рис. 16. Преобразование нижних частот в полосу частот
3
Нормированная ширина полосы пропускания фильтра =макс–мин может выбираться
произвольно. Из рис. 16 видно, что полосовой фильтр на частотах макс и мин обладает таким же
коэффициентом передачи, что и ФНЧ при = 1. Если параметры ФНЧ нормированы
относительно частоты среза, на которой его коэффициент передачи уменьшается на 3 дБ, то
значение также будет нормированной шириной полосы пропускания. Учитывая, что
=макс–мин и максмин=1,
получим выражение для вычисления нормированных частот среза полосового фильтра, на
которых его коэффициент передачи уменьшается на 3 дБ:
.
Избирательный (селективный) фильтр предназначен для выделения из сложного сигнала
монохромной составляющей и по сути является узкополосным полосовым фильтром. Фильтры
этого типа имеют АЧХ, подобные амплитудно-частотным характеристикам колебательных LCконтуров. Характерным для этих фильтров является пик АЧХ в области резонансной частоты fр.
Характеристикой избирательности фильтра является добротность Q, определяемая как отношение
резонансной частоты к полосе пропускания, т.е.
Q = fp/(fмакс – fмин) = 1/(макс –мин) = 1/.
Простейший полосовой фильтр можно получить, применив преобразование (15) к
передаточной функции ФНЧ первого порядка (10). В результате получим:
Подставив выражение для добротности (16) в соотношение (17), получим передаточную
функцию полосового фильтра
Это выражение дает возможность определить основные параметры полосового фильтра
второго порядка непосредственно из его передаточной функции.
8.7.4 Активные RC-фильтрыфильтры
Усилитель с частотно-зависимым коэффициентом усиления является активным фильтром. ОУ
является весьма подходящим элементом для реализации подобных фильтров. Для выбора типа
цепей обратных связей используется теория синтеза фильтров. На рис. 16 а,б представлены
примеры ФНЧ первого и второго порядков.
Рис. 16
Для реализации фильтров нижних частот, верхних частот и полосовых широкое применение
нашла схема фильтра второго порядка Саллена-Ки. На рис, 2.25 приведен ее вариант для ФНЧ.
Отрицательная обратная связь, сформированная с помощью делителя напряжения
R3, (— 1)R3, обеспечивает коэффициент усиления, равный . Положительная обратная связь
обусловлена наличием конденсатора С2. Передаточная функция фильтра имеет вид:
4
Расчет схемы существенно упрощается, если с самого начала задать некоторые
дополнительные условия. Можно выбрать коэффициент усиления = 1. Тогда ( — 1)R3= 0, и
резистивный делитель напряжения в цепи отрицательной обратной связи можно исключить. ОУ
оказывается включенным по схеме неинвертирующего повторителя. В простейшем случае он
может быть даже заменен эмиттерным повторителем на составном транзисторе. При = 1
передаточная функция фильтра принимает вид:
Для расчета фильтра можно задать значения резисторов R1\ и R3 и по приведенным формулам
вычислить значения R2, С1 и С2. Однако, в связи с тем, что конденсаторы, как правило, приходится
выбирать из ряда Е12, где отношение соседних емкостей составляет 1.21, или даже из ряда Е6, где
отношение соседних емкостей составляет 1.47, удобнее задаваться значениями емкостей конденсаторов и вычислять необходимые значения сопротивлений резисторов. Расчет следует начинать с
выбора емкостей C1, С2. Для того чтобы получить приемлемые сопротивления резисторов,
рекомендуется взять C1 =j 10/fс (мкФ). Считая, что емкости конденсаторов С1 и С2 выбраны,
получим для заданных значений а1 и b1:
Чтобы значения R\ и R2 были действительными, должно выполняться условие
Расчеты можно упростить, положив R1 =j R2 =j R и С1 =j С2 =j С. В этом случае для реализации
фильтров различного типа необходимо изменять значение коэффициента . Передаточная
функция фильтра будет иметь вид
Отсюда с учетом формулы (2.33) получим
Из последнего соотношения видно, что коэффициент определяет добротность полюсов и не
влияет на частоту среза. Величина в этом случае определяет тип фильтра.
На Рис. 2.26 приведена схема ФНЧ второго порядка с многопетлевой отрицательной обратной связью
(фильтр Рауха).
Здесь ОУ используется в инвертирующем включении. Передаточная функция этого фильтра
Приравняв коэффициенты этой передаточной функции к коэффициентам выражения (2.33),
получим
Для определения сопротивлений резисторов при выбранных емкостях конденсаторов решим
уравнения (2.42) относительно сопротивлений
5
Для того чтобы значение сопротивления R2 было вещественным, должно выполняться условие
При его выполнении в процессе расчета фильтра не следует выбирать отношение C2/C1 много
большим величины, стоящей справа. Характеристики фильтра мало зависят от точности подбора
номиналов его элементов, поэтому рассмотренная схема может быть рекомендована для реализации
фильтров с высокой добротностью.
При приеме слабых сигналов смещение нуля операционных усилителей, входящих в состав фильтров
на Рис. 2.25, 2.26, накладываясь на входной сигнал, порождает ошибку, поэтому очень интересна схема
ФНЧ, нечувствительная к смещению нуля ОУ. Эта схема приведена на Рис. 2.27.
Передаточная функция фильтра при условии, что он работает на холостом ходу, имеет вид:
Выбрав емкости конденсаторов С1 и С2, найдем сопротивления резисторов
Для построения активных фильтров высоких частот в выражении (1) следует осуществить
замену р на 1/р.
Соответственно, схема ФВЧ получается из схемы ФНЧ взаимной заменой R и C в цепях,
определяющих частотную характеристику. ФВЧ с многопетлевой ОС применяются редко из-за
большого количества конденсаторов, а схемы рис.16 приобретут вид рис.17 для ФВЧ.
Рис.17
Для построения полосовых фильтров осуществляют замену p на
, где нормированная относительно резонансной частоты полоса пропускания фильтра. Добротность
фильтра определяется как
Передаточная характеристика может быть записана как,
Где К0-коэффициент усиления на резонансной частоте.
6
Полосовой фильтр может быть реализован в виде каскадного соединения ФНЧ и ФВЧ, но
может быть создан и на одном ОУ, например, так, как показано на рис.18.
Рис.18
Здесь
Отсюда получаем
Активный заграждающий фильтр может быть реализован на основе двойного Т-образного моста. Хотя
двойной Т-образный мост сам по себе является заграждающим фильтром, его добротность составляет
только 0,25. Ее можно повысить, если мост включить в цепь обратной связи ОУ. Один из вариантов такой
схемы приведен на рис. 20. Сигналы высоких и низких частот проходят через двойной Т-образный мост без
изменения. Для них выходное напряжение фильтра равно Uвх. На резонансной частоте выходное
напряжение равно нулю. Передаточная функция схемы на рис. 20 имеет вид:
или учитывая, что р= 1/RC,
С помощью этого выражения можно непосредственно определять требуемые параметры фильтра.
Задав коэффициент усиления неинвертирующего усилителя равным 1, получим Q=0,5. При увеличении
коэффициента усиления добротность растет и стремится к бесконечности, если стремиться к 2.
Рис. 20. Активный заграждающий фильтр с двойным Т-образным мостом
Если спад АЧХ фильтра второго порядка оказывается недостаточно крутым, следует применять фильтр
более высокого порядка. Для этого последовательно соединяют звенья, представляющие собой фильтры
первого и второго порядка. В этом случае АЧХ звеньев фильтра перемножаются (в логарифмическом
масштабе — складываются). Следует иметь в виду, что последовательное соединение, например, двух
одинаковых фильтров Баттерворта второго порядка (как и фильтров любого другого типа) не приведет
к получению фильтра Баттерворта четвертого порядка. Результирующий фильтр будет иметь другую
частоту среза и другую частотную характеристику. Поэтому необходимо задавать такие коэффициенты
звеньев фильтра из таблиц типа вышеприведенной Табл. 2.1, чтобы результат перемножения их частотных
характеристик соответствовал желаемому результату.
Реализация активных фильтров на основе метода переменных состояния
В схемах фильтров, рассмотренных выше, используется минимальное число элементов (один
операционный усилитель на два полюса передаточной функции). Эти схемы, однако, чувствительны к
7
изменениям параметров элементов (особенно при высокой добротности) и не пригодны для построения
универсальных программируемых фильтров. Поэтому в составе ИМС фильтров используются схемы,
построенные на основе метода переменных состояния. В таких схемах реализуется решение
дифференциальных уравнений, описывающих процессы в фильтрах. Схема двухполюсного фильтра,
постороенного на основе метода переменных состояния, приведена на рис. 21. Эта схема широко
применяется благодаря повышенной устойчивости и легкости регулировки. Схема состоит из двух
интеграторов и двух сумматоров. Напряжение на выходе второго сумматора
.
Поскольку
U2 = –Uвых/S и Uвых = –U1/S
(S=jsRfC), передаточная функция фильтра имеет вид:
Рис. 21. Схема фильтра второго порядка, построенного на основе метода переменных состояния
причем Q=R1/RQ, K0=R1/RK. Таким образом, на рис. 21 приведена схема полосового фильтра, параметры
которого могут регулироваться независимо друг от друга. Найдем передаточные функции этой схемы
относительно выходов U1, U2 и U3. Из (25) с учетом (24) получим:
,
,
.
т.е. схема на рис. 21 в зависимости от того, к какой точке схемы подключен выход, может служить также
фильтром нижних частот, фильтром верхних частот и заграждающим фильтром.
Подобные фильтры выпускаются в виде ИМС многими фирмами, например, AF100/150 (National
Semiconductor), LTC1562 (Linear Technology) или МАХ274/275 (Maxim). Они имеют перестраиваемую частоту
среза до нескольких сотен килогерц, порядок вплоть до восьмого и зачастую программируемый тип
фильтра. Недостатком этих схем является необходимость в большом количестве внешних высокоточных
элементов. От этого недостатка свободны фильтры на коммутируемых конденсаторах.
Биквадратные фильтры. Наиболее близко по идее построения к фильтру на основе метода
переменных состояния примыкает так называемый биквадратный фильтр, схема которого приведена на
Рис. 2.36.
Для него можно найти
8
Если принять R1R3 =j R2R7, то в соответствии с (2.55) V1 можно использовать как выходное
напряжение звена эллиптического фильтра. Если же R7 =j и R8 =j , то, как следует из (2.56), выходное
напряжение V2 соответствует звену 2-го порядка полиномиальных фильтров: Баттерворта, Чебышева и
Бесселя. Так же как и фильтр, построенный на основе метода переменных состояний, биквадратный
фильтр мало чувствителен к неточности элементов и прост в настройке.
Параметры схемы, реализующей какой-либо из фильтров Баттерворта, Чебышева и Бесселя,
выходным сигналом для которых является напряжение V2 при условиях R7 =j oo и R8 = 00 , определяют
следующим образом. Выбирают требуемое значение емкости С1, базируясь на полосе пропускания (как в п.
2.3.6), а затем находят значения остальных элементов по формулам:
Биквадратное звено эллиптического фильтра (выходной сигнал — напряжение V1) рассчитывают,
пользуясь соотношениями:
С2 и Rз выбирают так, чтобы уменьшить разброс получаемых в результате расчета сопротивлений. Для
большинства случаев можно принимать С2 = C1 и Rз=1/(2fсС1).
Передаточные функции фильтров верхних частот, как и ранее, можно получить, если в (2.55) и (2.56)
вместо S подставить 1/S. При этом для эллиптического фильтра структура передаточной функции
сохранится, изменяются только ее коэффициенты. Это значит, что эллиптические фильтры верхних частот
реализуются с помощью точно таких же биквадратных схем, что и фильтры нижних частот, но при других
сопротивлениях и емкостях.
Активные фильтры выпускаются в виде ИМС многими фирмами, например, AF100/150 (Natioльшая неравномерность в полосеnal
Semicoльшая неравномерность в полосеnductoльшая неравномерность в полосеr), LTC1562 (Linear Technoльшая неравномерность в полосеloльшая неравномерность в полосеgy), MAX270/271 или МАХ274/275 (Maxim). Они имеют
перестраиваемую частоту среза до нескольких сотен килогерц, порядок вплоть до восьмого и зачастую
программируемый тип фильтра.
Например, ИМС активного фильтра МАХ270 содержит две секции ФНЧ Чебышева 2-го порядка
по схеме Саллена-Ки (Рис. 2.37).
Частота среза каждой секции может быть независимо установлена в пределах от 1 до 25 кГц параллельным
7-разрядным кодом. ИМС МАХ274 включает четыре секции фильтра, построенные на основе метода
9
переменного состояния. Частота среза, добротность и коэффициент усиления секций устанавливаются внешними резисторами. Секции могут использоваться для построения ФНЧ и ПФ вплоть до 8-го порядка.
Подобную структуру имеет и ИМС фильтра LTC1562.
Недостатком этих схем является необходимость в большом количестве внешних высокоточных
элементов, и, как следствие, сложность настройки и перестройки частоты. От этого недостатка свободны
фильтры на коммутируемых конденсаторах, которые будут рассмотрены ниже в п. 7.8. В настоящее время
наибольшее число моделей ИМС активных фильтров строятся именно на схемах с коммутируемыми
конденсаторами.
2.3.8. Фазовые фильтры
В описанных ранее фильтрах коэффициент передачи и фазовый сдвиг зависели от частоты
входного сигнала. Ниже рассмотрены схемы, коэффициент передачи которых не зависит от
частоты, а фазовый сдвиг с частотой меняется. Такие схемы относят к классу
неминимальнофазовых и называют фазовыми фильтрами. Фазовые фильтры применяются для
коррекции фазовых сдвигов, управления фазой сигналов и их временной задержкой.
Передаточная функция фазового фильтра представляет собой дробно-рациональное
выражение, числитель которого является комплексно-сопряженным по отношению к знаменателю
Выражение (2.57) в общем случае можно представить в виде
Частотная характеристика фазового фильтра
Особый интерес представляет применение фазовых фильтров для задержки сигнала в
аудиотехнике и в автоматике. В первом случае — для создания различных акустических эффектов,
а во втором — для моделирования систем с чистым запаздыванием. При этом на первый план
выдвигается требование отсутствия искажений при передаче сигналов. Первое условие
неискаженной передачи — независимость коэффициента передачи фильтра от частоты. Как видно
из (2.59), это требование выполняется. Другое условие состоит в том, чтобы групповое время
задержки схемы для рассматриваемого частотного спектра было постоянным.
Групповое время задержки — это время, на которое входной сигнал, представляющий собой
группу колебаний, близких по частоте, задерживается фазовым фильтром.
Нормированное групповое время задержки Tгр, определяют следующим образом:
Подбор коэффициентов ah bt проводится так, чтобы обеспечить вид ФЧХ наиболее близкий к
линейному в возможно большей полосе частот. Другой путь состоит в приближении передаточной
функции звена чистого запаздывания
10
рядом Паде. Первый член ряда Паде имеет вид
Здесь — время задержки.
Схема фазового фильтра первого порядка приведена на Рис. 2. 38.
Передаточная функция этого фильтра имеет вид
Для низких частот групповое время задержки не превысит значения 2RC, как это следует из
(2.62).
Расчеты показывают, что при условии практического отсутствия фазовых искажений
групповое время задержки для сигнала со спектром в полосе 0...3 кГц не превысит 60 мкс, что
совершенно недостаточно для многих приложений. Но зато эта схема с успехом может быть
применена в качестве широкополосного фазовращателя. Изменяя сопротивление резистора R,
можно установить необходимую величину фазового сдвига в диапазоне 0... — 180°, не меняя
амплитуду выходного сигнала. Величину фазового сдвига можно определить по формуле
Фазовый фильтр второго порядка может быть реализован с помощью схемы полосноподавляющего фильтра с многопетлевой обратной связью (см. Рис. 2.32), нужно только
исключить из схемы резистор R3. Посмотрев внимательно на передаточную функцию этого
фильтра (2.50), можно увидеть, что при выполнении условия
числитель и знаменатель соответствующей ей частотной характеристики окажутся
комплексно-сопряженными. Из уравнения (2.63) с учетом (2.47) следует необходимость
выполнения условия
Иначе говоря, для того, чтобы схема на Рис. 2.32 была фазовым фильтром 2-го порядка
требуется соблюдение равенства
Включив фазовый фильтр каскадно с ФНЧ Баттерворта можно выбрать его параметры так, что
в пределах полосы пропускания фазо-частотная характеристика этого комбинированного фильтра
будет линейна, т. е. сигналы будут передаваться без искажения. В то же время АЧХ не изменится,
оставаясь по-прежнему наиболее плоской в полосе пропускания по сравнению с фильтрами иного
типа.
11
Реализация на непрерывных фазовых фильтрах значительных задержек широкополосных
сигналов требует построения сложных схем. В частности, в [2.4] приведен пример,
показывающий, что для задержки без искажений сигнала полосой 0... 1 кГц на время всего в 2 мс
необходимо использовать фазовый фильтр 7-го порядка. В то же время для создания, скажем,
эффекта двухголосного звучания в акустике требуется задержка сигнала в полосе хотя бы до 5 кГц
примерно на 5 мс. Поэтому сегодня такое устройство целесообразно строить по схеме: АЦП-ОЗУ
обратного магазинного типа (FIFO)-ЦАП.
Завершая тему активных фильтров, следует отметить, что в настоящее время активные
фильтры высокого порядка на ОУ с RC-цепями в обратных связях интенсивно вытесняются
фильтрами на коммутируемых конденсаторах и схемами со структурой «АЦП-цифровой фильтрЦАП». Однако все эти фильтры, производящие дискретные выборки входного сигнала, имеют
очень существенный недостаток: они допускают сквозное прохождение тактового сигнала, а
сигналы, спектры которых расположены вблизи частоты тактового сигнала, преобразуют в
побочные низкочастотные. Поэтому при высоких требованиях к качеству сглаживания
необходимо включать непрерывные фильтры хотя бы 1-го или 2-го порядка на входе и выходе
дискретизирующего фильтра. Например, ИМС фильтра 8-го порядка на коммутируемых
конденсаторах МАХ291 содержит свободный (неподключенный) ОУ, на котором можно собрать
входной или выходной непрерывный ФНЧ.
12
§ 6.9. ДЕТЕКТОРЫ ЭЛЕКТРИЧЕСКИХ СИГНАЛОВ
Детекторами называются устройства, с помощью которых из электрических сигналов
выделяется информационная составляющая.
В зависимости от преобразуемого параметра, который песет информацию, их подразделяют на
амплитудные, фазовые, частотные. Отдельную группу составляют синхронные детекторы,
часто выполняющие функции избирательных устройств. Среди амплитудных, которые часто
называют выпрямителями, амплитудными дискриминаторами или преобразователями тех или
иных значений, принято различать детекторы средневыпрямленного, пикового и действующего
(эффективного) значений.
Название детектора характеризует параметр преобразуемого сигнала, которому
пропорционально выходное напряжение (ток).
Детекторы средневыпрямленного значения выполняются по схемам обычных выпрямительных
устройств с учетом того, что выходной сигнал должен быть точно пропорционален
соответствующему параметру входного. Применяют как однополупериодное выпрямление
входного сигнала (рис. 6.48,а), при котором выходной сигнал (рис. 6.48,6)
гак и двухполупериодное (рис. 6.48,в), характеризуемое уравнением
где К—коэффициент пропорциональности.
При невысокой точности преобразования и больших уровнях входного сигнала |UBxm| » |UK|
применяют пассивные преобразователи (рис. 6.49,а,б). У детектора (рис. 6.49,а) для улучшения
линейности последовательно с основным выпрямительным диодом
VD2 включен резистор R3. Сопротивление его значительно больше
прямого сопротивления диода. Тем самым режим работы открытого
диода VD2 приближается к режиму заданного тока, в котором
нелинейность прямой ветви его вольт-амперной характеристики мало
влияет на выходной сигнал. Диод VD1 и резистор R2 включены для
того, чтобы в оба полупериода нагрузка резистора R1 была
одинаковой: R2 = R3. Это предохраняет от появления дополнительной
постоянной составляющей на разделительном конденсаторе, который
часто устанавливается на выходе источника напряжения Uвх.
Недостатки такого детектора: значительная нелинейность при малых
входных сигналах, низкая точность и стабильность, изменение
характеристик преобразования при смене диодов.
Эти же недостатки присущи двухполупериодному выпрямителю (рис. 6.49,6). В нем для
линеаризации и улучшения температурных характеристик дополнительно введены диоды VD5,
VD6, включенные в прямом направлении. При малых входных сигналах прямое сопротивление
диодов VD1— VD4 имеет повышенное значение, что приводит к уменьшению выходного сигнала.
Однако при этом увеличивается и сопротивление диодов VD5, VD6, включенных параллельно с
RH. Это ведет к перераспределению тока выпрямителя. Относительно большая составляющая
начнет протекать через сопротивление нагрузки RH и нелинейность характеристики
преобразования существенно уменьшится. Аналогично рассмотренному осуществляется
компенсация температурной погрешности. При повышении температуры прямое напряжение
1
диодов выпрямителя уменьшается на 2,2 мВ/град, что должно привести к увеличению выходного
сигнала. Одинаковые с этим уменьшения прямого напряжения на диодах VD5, VD6 снижают
уровень выходного сигнала. В итоге результирующее изменение характеристик преобразования
оказывается значительно меньше, чем это было бы при отсутствии компонентов параметрической
компенсации. Ее эффективность зависит от правильности выбора резисторов R4, R5, на значение
которых влияет сопротивление нагрузки.
Значительно лучшие характеристики преобразования можно получить при использовании
детекторов средневыпрямитель-ного значения с активными компонентами. В них выпрямительные узлы обычно включаются в цепь отрицательной ОС, что позволяет приблизительно в Ки раз
уменьшить входное напряжение, при котором диоды открываются. Соответственно уменьшаются
влияния нестабильности порогового напряжения и разброса прямых сопротивлений диодов.
В качестве прецизионных однополупериодных детекторов средневыпрямленного значения
обычно используют ограничители (рис. 6.39,в), имеющие хорошие характеристики преобразования в диапазоне частот до 10 кГц.
На основе этой схемы создают и двухполупериодные выпрямители (рис. 6.50,а). В таком
детекторе средневыпрямленного значения напряжения ОУ DA1 и DA2 выпрямляют разные
полуволны входного сигнала, которые суммируются с противоположными знаками в ОУ DA3.
Коэффициент усиления каждой полуволны
KR2/R1,
(6.170)
причем предъявляются жесткие требования к равенству сопротивлений резисторов R1, R2, R3.
Преимущества данной схемы — в идентичности узлов, выпрямляющих разные полуволны.
2
3
Благодаря этому разница в коэффициентах преобразования напряжения каждого из
полупериодов имеет минимальное значение. Однако параметры преобразования зависят от большого числа сопротивлений, что требует их тщательного отбора. Кроме того, погрешности вносит
напряжение смещения нуля ОУ DA3 и его дрейф.
В двухполупериодном детекторе (рис. 6.50,6) применен один выпрямляющий узел на ОУ DA1,
который инвертирует входной сигнал. Выходное напряжение ОУ DA2 равно:
Если выполняется условие
то коэффициенты преобразований полуволн напряжений равны и имеют разные знаки. В
результате сигнал на выходе будет однополярным и пропорциональным средневыпрямленному
значению напряжения (рис. 6.50,в).
Погрешности преобразования зависят от точности выполнения условия (6.173) и смещения
нуля ОУ DA2.
Для
сглаживания
пульсаций
выходного
напряжения
к
выходу
детекторов
средневыпрямленного значения подключены фильтры низких частот, выполненные на пассивных
или активных компонентах, причем смещения нуля активных компонентов дополнительно
увеличивают погрешность преобразования. Несмотря на эти недостатки, на основе рассмотренных
схем можно создать детекторы, погрешности которых не превышают десятые — сотые доли
процента.
Значительно лучшие характеристики при существенном упрощении схемы удается получить в
детекторах с коммутируемыми конденсаторами (рис. 6.51, а, б).
Рассмотрим работу однополупериодного детектора (рис. 6.51,а), считая идеальным усилитель
переменного напряжения 1. Пусть напряжение на конденсаторе С равно нулю и на вход поступает
отрицательная полуволна напряжения. В этом случае диод VD1 открыт, а потенциал точки а равен
потенциалу общей шины. Напряжение на конденсаторе С имеет нулевое значение. При смене
полярности входного напряжения открывается диод VD2, но в точке а потенциал остается
нулевым. Конденсатор С начинает заряжаться током I, который равен I=UBX/R1. За время этой
полуволны на нем накопится заряд
При отрицательном сигнале второго периода напряжение в точке а равно нулю, диод VD1
открыт, a VD2 закрыт. Конденсатор С разряжается через резистор R2. Его заряд уменьшается по
4
экспоненциальному закону
При положительной полуволне процесс зарядки конденсатора С повторяется и напряжение на
нем повышается, причем ток зарядки практически не зависит от напряжения на конденсаторе
вследствие того, что он включен в цепь ОС усилителя. Ток разрядки при каждой полуволне
увеличивается из-за повышения напряжения на конденсаторе С. При равенстве изменений заряда
наступает динамическое равновесие. Среднее напряжение на конденсаторе перестает меняться,
что свидетельствует об окончании переходного процесса.
Постоянная составляющая выходного напряжения пропорциональна средневыпрямленному
значению входного при однополупериодном выпрямлении.
Действительно, исходя из равенства приращений заряда на конденсаторе при его зарядке и
разрядке можно записать
Если учесть, что постоянную времени = R2C берут большой, так, чтобы за период входного
сигнала напряжение на конденсаторе существенно не изменилось, то можно считать, что его
постоянная составляющая
Так как напряжение Uc присутствует на выходных зажимах в течение промежутка времени t =
Т/2, для UВЬ1Х можно записать
Амплитуда пульсаций выходного напряжения зависит от частоты сигнала и значений емкости
конденсатора С и резисторов R1, и R2. Этими же параметрами определяется длительность
переходного процесса. Поэтому имеется однозначная связь между быстродействием и уровнем
пульсации UC выходного напряжения. Так, при UBX=1 В и пульсациях 3 мВ время установления
около 10 с.
Аналогично рассмотренному работает двухполупериодный детектор (рис. 6.51,6). В отличие от
рассмотренного во время второй полуволны конденсатор С заряжается через резистор R2 и
постоянная составляющая напряжения на нем в два раза больше, чем у однополупериодного
выпрямителя.
Погрешности преобразования у таких детекторов в диапазоне средних частот могут быть менее
0,001%. В диапазоне низких частот погрешность увеличивается из-за уменьшения коэффициента
усиления усилителей переменного напряжения. Для его существенного увеличения в схеме рис.
6.50, б включены два ОУ. В диапазоне низких частот вместо усилителя переменного напряжения
можно применять бездрейфовые ОУ типа МДМ. Рассматриваемые детекторы хорошо работают на
высоких частотах, обеспечивая на частоте 1 МГц погрешности менее 0,01—0,2% при
использовании достаточно высокочастотного усилителя.
Преобразователи электрических сигналов, выходное напряжение которых равно
максимальному значению модуля входного сигнала, называются пиковыми или амплитудными
детекторами.
Различают пиковые детекторы с открытым и закрытым входами. В детекторах с открытым
входом выходной сигнал пропорционален сумме постоянной и максимального значения
переменной составляющих входного напряжения. В детекторах с закрытым входом имеется
разделительный конденсатор и выходной сигнал пропорционален только переменной составляющей входного.
Схемы пиковых детекторов, выполненных на пассивных компонентах, приведены на рис. 6.52,
5
а, б, 6.53, а, б, в. Общим условием их нормальной работы является большое сопротивление
нагрузки, так чтобы р» Т, и малое значение постоянной времени зарядки конденсаторов 3<<р,
где р = RнС (T—длительность периода входного сигнала). При их выполнении конденсаторы за
время одной полуволны (нескольких полуволн) заряжаются до максимального значения входного
сигнала. В промежутках между процессами зарядки напряжение на них изменяется незначительно
из-за большой постоянной времени цепи разрядки. К тому же эти уменьшения напряжения
компенсируются соответствующей подзарядкой, происходящей в каждый период воздействия
входного сигнала.
Пусть на вход пикового детектора с открытым входом (рис. 6.52, а) подано входное
напряжение UBX (рис. 6.52, в). имеющее постоянную составляющую U0. При первой
положительной полуволне диод VD открывается и конденсатор С заряжается до напряжения Uc
Um+ U0. Как только напряжение, приложенное к диоду, становится меньше пороговом (контактной
разности потенциалов), диод запирается и начинается разрядка конденсатора через сопротивление
нагрузки Rн При большой постоянной времени цепи разрядки р напряжение на конденсаторе
изменится незначительно за промежуток времени, в течение которого напряжение на диоде снова
превысит пороговое значение. При этом диод снова откроется и увеличит заряд на конденсаторе С
и напряжение на нем Промежуток времени, в течение которого диод открыт характеризуется
углом отсечки 2. Угол отсечки зависит от постоянных времени цепей зарядки и разрядки
конденсатора С, а также от формы входного сигнала. Значение его можно найти исходя из условия
равенства приращений тока зарядки Q3 и разрядки Qр:Q3 = Qp. При малых значениях угла ,
что характерно для пиковых детекторов, можно считать справедливым приближенное уравнение
где R3 — сопротивление цепи зарядки конденсатора, равное сумме сопротивлений источника
входного сигнала и прямого сопротивления диода.
6
Из (6.179) видно, что чем больше постоянная времени разрядки р и меньше постоянная
времени зарядки 3, тем меньше угол . Постоянная составляющая выходного напряжения
детектора
Uc Uвых U0+Um cos U0+Um.
(6.180)
Уравнения (6.179), (6.180) справедливы при синусоидальной форме входного сигнала. Но они
могут быть использованы и для прикидочных расчетов и в случае несинусоидальных напряжений.
Таким образом, выходное напряжение детектора с открытым входом равно пиковому значению
входного сигнала данной полярности относительно нулевого уровня.
В случае пикового детектора с закрытым входом конденсатор С заряжается до напряжения Uc
(рис. 6.52, в) аналогично рассмотренному. Так как постоянное напряжение Uc вычитается из
входного сигнала, то на сопротивлении нагрузки оказывается пульсирующее падение напряжения.
Его постоянная составляющая Um cos Um. Для ее выделения к выходу детектора необходимо
подключать фильтр низких частот, имеющий высокое входное сопротивление. В ряде случаев
вместо фильтра низких частот подключают детектор с открытым входом, аналогичный
показанному на рис. 6.52, а и 6.53, а. В этом случае выходной сигнал
Uвых (Uт+ ит cos 1)cos 2 2ит,
где 1 и 2 — углы отсечки пиковых детекторов на диодах VD1 и VD2.
Для получения выходного напряжения, равного размаху входного, применяют детекторы рис.
6.53, б, в. Выходное напряжение схемы рис. 6.53, б определяется разностью максимального и
минимального входных напряжений при наличии в их составе постоянной составляющей. У
детектора рис. 6.53, в выходное напряжение равно 2Um. Пиковые детекторы, у которых выходной
сигнал больше входного, являются основой для построения устройств, обеспечивающих
увеличение выходного напряжения без использования дополнительных источников электрической
энергии. Цепи данного целевого назначения называют умножителями напряжений.
Пиковые детекторы с пассивными компонентами хорошо работают до частот в сотни МГц.
Однако их эффективная работа возможна только в случае больших входных сигналов, когда Uвх »
Uпор, где Uпор - пороговое напряжение, при котором открывается диод. При малых напряжениях
наблюдается существенная нелинейность характеристики преобразования.
Для уменьшения погрешностей пиковых детекторов в диапазоне частот до 100 кГц и более
широко применяют активные компоненты. Так, если запоминающий конденсатор С под
ключить к инвентирующему входу ОУ (рис. 6.54, а), то влияние на выходной сигнал порогового
напряжения диода VD2 уменьшится в 1+Куи раз. При положительной полуволне входного сигнала
диод VD2 смещается в прямом направлении и конденсатор С заряжается до напряжения Uвых=
UВХm(1 — 1/KyU). При напряжении меньшем Uвхm диод VD2 запирается. Запомненное значение
хранится на конденсаторе С, уменьшаясь с течением времени вследствие наличия у диода VD2
обратного тока и входного тока у ОУ. На значение выходного сигнала также влияют
сопротивление утечки конденсатора и дифференциальное входное сопротивление ОУ. Диод VD1
введен для ограничения уровня выходного напряжения отрицательной полярности. Это повышает
быстродействие вследствие меньшего заряда на барьерной емкости диода VD2, но может быть
применено только тогда, когда ОУ имеет цепь защиты от короткого замыкания. В противном
случае диод VD1 следует убрать. Для уменьшения влияния на выходной сигнал входного
сопротивления ОУ, которое в ряде микросхем имеет небольшое значение при большом
дифференциальном сигнале, целесообразно применять микросхемы с МОП-транзисторами в цепях
7
входов. Постоянная времени цепи зарядки конденсатора в этом случае равна з = RвыхС/(1 +Куи),
где RBbIX — выходное сопротивление ОУ. Постоянная времени разрядки зависит от нагрузки и сопротивлений и токов утечек. ОУ попадает в ограничение по отрицательной полярности при
входных напряжениях, меньших UBxm. Это снижает быстродействие детектора.
Лучшие характеристики преобразования удается получить с помощью схемы рис. 6.54, б. В
этом случае к конденсатору С подключен повторитель напряжения DА2. Он имеет большое
входное сопротивление, что повышает стабильность сохранения заряда на конденсаторе С.
Кроме того, введение OY DA2 позволяет ввести отрицательную ОС по положительной полярности. Вследствие этого ОУ не попадает в ограничение, что повышает его быстродействие. В
схеме также предусмотрена цепь, позволяющая разрядить конденсатор С и тем самым «стереть»
запомненную информацию. Это ключ на МОП-транзисторе VT3. При подаче на его затвор
управляющего напряжения Vс6р транзистор открывается. Конденсатор С быстро разряжается до
нуля через малое сопротивление канала.
С использованием этих принципов выполняются пиковые детекторы импульсных вольтметров
и узлы электронных схем. в которых используется информация об экстремальных значений
сигнала.
Детекторы действующего или эффективного значений преобразуют входной сигнал в
выходное напряжение, определяемое уравнением
где К—коэффициент пропорциональности.
Особенностью этих детекторов является то, что их выходное напряжение не зависит от
формы и частоты входного сигнала при постоянстве у него действующего значения
напряжения.
В соответствии с (6.181) такие детекторы аналоговых сигналов могут быть реализованы двумя
путями: с использованием логарифмирующих и антилогарифмирующих устройств, с помощью
нелинейных преобразователей, имеющих квадратичную характеристику, и устройства,
позволяющего извлечь квадратный корень.
При использовании логарифмирующих и антилогарифмирующих устройств последовательно
включаются преобразователи и усилители, выполняющие математические операции в соответствии с уравнением (6.181). Обычно это сложное устройство, имеющее небольшую точность
преобразования.
Преобразователи с квадратичными характеристиками используются значительно чаще. В
качестве их обычно применяют нелинейные усилители, амплитудная характеристика которых
аппроксимируется параболой. Способ построения таких детекторов поясняет структурная схема
рис. 6.55. Входное напряжение выпрямляется однополупериодными выпрямителями 1 и подается
на усилители 2, имеющие квадратичные вольт-амперные характеристики. На их выходе сигналы
пропорциональны квадрату положительной и отрицательной полуволн входного напряжения
KU'BX и —KU''вх Знак одного из напряжения меняется усилителем 3, имеющим единичный
коэффициент усиления по напряжению. После суммирования в сумматоре 4 сигнал равен
K1U2вx(t). Он усредняется с помощью фильтра низких частот 5. В устройстве 6 из сигнала
извлекается квадратный корень. В результате этих операций выходное напряжение определяется
уравнением (6.181). Схемотехническое выполнение всех функциональных узлов рассмотрено
ранее и не требует специальных пояснений. Из-за большого их количества трудно получить
высокую точность детектирования. Поэтому погрешность квадратичных детекторов обычно равна
десятым долям — нескольким процентам.
8
Фазовые детекторы обеспечивают получение выходного напряжения, пропорциональное
фазовому сдвигу между двумя сигналами, имеющими одну частоту. Их часто называют
фазочувствительными выпрямителями или синхронными детекторами. Под синхронным
детектированием понимают преобразовательные цепи, в которых коммутация элемента,
меняющего коэффициент передачи устройства, осуществляется синхронно с одним из входных
сигналов, частота которого может отличаться от частоты второго входного сигнала. Поэтому
фазовые детекторы представляют собой частный случай синхронных детекторов.
Применяются линейные и ключевые фазовые детекторы. Линейные фазовые детекторы
выполняются на основе перемножителей аналоговых сигналов. В них на один из входов, например
вход X, подается напряжение Ux = Uon cos t, а на другой (У) — напряжение Uy= Uccos(t + ). В
результате перемножения выходной сигнал равен
где К, К1, К2 — масштабные коэффициенты.
Если к выходу перемножителя подключить фильтр низких частот, который не пропускает
высокочастотную составляющую, имеющую частоту 2w, то выходное напряжение фильтра будет
равно
где Кз — масштабный коэффициент.
Таким образом, перемножитель сигналов, к входу которого подключен фильтр низких частот,
не пропускающий переменной составляющей, обеспечивает получение постоянного напряжения,
пропорционального фазовому сдвигу между напряжениями Uon и Uc.
При создании фазовых детекторов могут быть использованы микросхемы 140МА1, 525ПС1,
525ПС2 и др., причем тип микросхемы выбирается исходя из частотного диапазона ее работы.
С целью уменьшения количества дополнительных навесных компонентов целесообразно
применять перемножители новых разработок, имеющие встроенный ОУ и малые смещения
нулевых сигналов, например типа 525ПС2 (рис. 6.56, а). В этом перемножителе приходится
устанавливать только навесные резисторы, компенсирующие смещение нуля выходного напряжения, и постоянные резисторы R1, R2, обеспечивающие получение нужных входных токов у
дифференциального каскада. Перемножаемые напряжения Uоп и Uc подключаются через
9
конденсаторы, устраняющие влияние постоянных составляющих входного сигнала. Фильтр
низких частот второго порядка выполнен на резисторе R3 и конденсаторе С1, а также на ОУ DA1.
Характеристика преобразования при постоянных амплитудах входных напряжений показана на
рис. 6.56,6. Дрейфы нуля перемножителя и фильтра низких частот приводят к появлению
соответствующих погрешностей преобразования. Поэтому их следует стремиться свести к
минимуму.
Для уменьшения погрешностей сигналы Uоп и Uc можно преобразовать в прямоугольные
импульсы за счет их усиления и ограничения. Их значения берут такими, чтобы перемножитель
под их воздействием насыщался. Это легко сделать при использовании микросхем типа 140МА1.
Тогда на выходе перемножителя будут прямоугольные импульсы положительной и
отрицательной полярности. Их величина не зависит от напряжений Uon и Uc, а полярность
и длительность определяются этими сигналами. Постоянная составляющая, выделяемая фильтром
низких частот, пропорциональна сдвигу фаз .
Ключевые фазочувствительные детекторы представляют собой электронные ключи,
управляемые одним из входных сигналов. Принцип их работы поясняется рис. 6.57. Так, если
имеется ключ (рис. 6.57, а), управляемый напряжением Uоп, то среднее напряжение на выходе
зависит от значения сигнала Uc и его фазового сдвига относительно напряжения Uoп. Так, если
напряжение изменяется по синусоидальному закону (рис. 6.57, б), фазовый сдвиг между Uc и Uon
равен нулю ( = 0) и ключ включается при положительной полярности напряжения Uоп, то
выходной сигнал имеет вид рис. 6.57, в.
Его среднее значение
10
При 90-градусном сдвиге фаз напряжений Uc и Uоп выходной сигнал имеет форму,
показанную на рис. 6.57, г. Его среднее значение
В общем случае выходное напряжение ключевого фазового фильтра можно найти из уравнения
Таким образом, выходное напряжение ключевого фазового фильтра зависит только от фазового
сдвига напряжений и величины сигнала Uс, причем, так же как и в случае линейного фазового
фильтра, оно выделяется с помощью фильтра низких частот. Если установить второй ключ,
управляемый напряжением Uоп, но открывающийся при другой полярности, и его выходное
напряжение после инвертирования просуммировать с уже имеющимся, то получится «двухполупериодный» фазовый детектор. Он будет иметь в два раза большую частоту пульсаций, что
позволяет уменьшить постоянные времени фильтра низких частот и увеличить быстродействие, а
также в два раза повысить выходной сигнал.
При практическом выполнении фазовых детекторов используются ключи, выполненные на
основе диодов, полевых и биполярных транзисторов, а также микросхемы аналоговых ключей,
например серий 590, 564, 561, 176.
На рис. 6.58, а, б, в показаны некоторые из возможных схем фазовых детекторов. В схеме 6.58,
а ключи выполнены на биполярных транзисторах VT1, VT2, имеющих электропроводность
противоположного типа. Они открыты при Uоп разного знака. Поэтому при одном полупериоде Uoп
ток протекает через транзистор VT1, при другом — через транзистор VT2.
11
Так как резисторы R2, с которых снимается выходной сигнал, равны между собой, то
коэффициенты передачи в каждый полупериод воздействия напряжения Uоп одинаковы и равны
К= — R2/R1. Выходной сигнал может быть снят с одного из резисторов R2 («однополупериодное»
преобразование) или с обоих резисторов («двухполупериодное» преобразование). Фильтр низких
частот выполнен на резисторах R3 и конденсаторе С. Транзисторы VT1, VT2 управляются токами,
задаваемыми резисторами R4. Значения их берутся такими, чтобы обеспечивался режим
насыщения. Вследствие малого сопротивления ОУ ток управления транзисторами практически не
влияет на выходной сигнал и не вносит погрешностей. Для улучшения характеристик фазового
фильтра следует брать ОУ с высокой скоростью нарастания выходного напряжения, использовать
высокочастотные транзисторы и сигнал Uon преобразовывать в напряжение прямоугольной формы.
Погрешность подобного фазового детектора в диапазоне средних частот 0,05—0,1%.
В фазочувствительном выпрямителе (рис. 6.58, б) ключи выполнены на полевых транзисторах.
Диоды в цепях их затворов предохраняют транзисторы VT1, VT2 от гальванического соединения с
источником управляющего напряжения Uоп при отпирающих полярностях его напряжения. При
одной полярности Uоп открыт ключ VT1 и коэффициент передачи
ОУ
а при другой открыт ключ VT2 и коэффициент передачи меняет
знак: Ки2= —R5/(R1 + R3). Резисторы выбирают так, чтобы |Ки1| = |Ки2|. Фильтр низких частот
выполняют на резисторе R7 и конденсаторе С. В данной схеме несколько уменьшено влияние
импульсов, которые сопровождают процесс переключения полевых транзисторов. Они возникают
за счет емкости Сзс и передают перепад Uon на вход ОУ. Так как близкие по значению импульсы
подаются на разные входы, то суммарная помеха равна их разности.
При больших значениях напряжений Uc и Uоп применяют ключи на диодах (рис. 6.58, в). В
таком кольцевом детекторе сопротивление диодов зависит от значений и полярности напряжений
Uc, Uon, а средний ток в диагонали пропорционален произведению значений напряжений и их
фазовому сдвигу.
Эффективные фазовые детекторы выполняют на основе схем выборки — хранения. В них
моменты выборки определяются напряжением Uоп, из которого формируются короткие
управляющие импульсы.
12
В синхронных детекторах частоты напряжений Uc и Uоп могут различаться между собой. Так,
если входной и опорный сигналы равны Uccoslt и Uопcos(2t + ) и частоты 1 и 2 близки между
собой, то при их перемножении получим
где К, K1, К2 — коэффициенты пропорциональности.
Из (6.185) видно, что постоянная составляющая в составе UBыX, пропорциональная cos, Uc и
Uon, появляется только в том случае, если 2 = 1. Это позволяет использовать синхронный
детектор в качестве узкополосного высокодобротного фильтра, который позволяет выделить из
состава сложного входного сигнала составляющую, имеющую частоту 2. Однако зависимость
результатов такой фильтрации от значения напряжения Uc заставляет отдавать предпочтение
ключевым синхронным детекторам. При этом из-за сложного спектрального состава напряжения
Uc постоянную составляющую будут давать все гармоники сигнала Uc, нечетные частоте 2 (32,
52, 72) (рис. 6.59). Ширина полосы пропускания определяется верхней частотой полосы
пропускания fB фильтра низких частот, подключенного к выходу синхронного детектора. С его
помощью выделяется постоянная составляющая. Поэтому реальный синхронный фильтр выделяет
не отдельные частоты, а полосы частот, ширина которых на уровне 0,7 равна 2fв. Чем меньше fв,
тем уже полоса пропускания и меньше быстродействие фильтра. Если сигнал Uc модулирован
частотой , то fв следует выбирать из условия <fв.
Синхронные фильтры широко используют для преобразования сигналов, имеющих в своем
составе импульсные помехи. Для этого входной сигнал преобразуют в прямоугольное напряжение
с помощью усилителя-ограничителя 1 и подают его на вход детектора вместо напряжения Uon (рис.
6.59, б). Такой детектор преобразует только частоту входного сигнала и его нечетные гармоники.
В результате помехи и шумы, имеющие другие частоты, не оказывают влияния на выходной
сигнал.
С помощью синхронных детекторов часто удается получить более высокую добротность,
чем при применении обычных фильтров. Так, например, с помощью их можно фильтровать
сигналы, имеющие граничную частоту 1 МГц с шириной полосы 2f= 1 Гц. Это соответствует
добротности Q106.
Частотные
детекторы
осуществляют
преобразование
частотно-модулированных
13
электрических сигналов в сигналы с другими электрическими параметрами. Чаще всего частота
преобразуется в напряжение. Такие детекторы называют преобразователями
частота —
напряжение (ПЧН).
Прецизионные ПЧН обычно имеют структуру рис. 6.60, а. Работа их заключается в том, что
электронный ключ подключает конденсатор С к источнику постоянного тока I с частотой
преобразуемого сигнала f, причем длительность подключения tn строго определенная и во много
раз меньше длительности периода входного сигнала при наибольшей его частоте. В промежутках
между подключениями источника тока конденсатор разряжается через резистор R, что исключает
процесс непрерывного нарастания выходного напряжения. В установившемся режиме приращения
зарядов на конденсаторе за время его разрядки и зарядки равны между собой, что позволяет
записать уравнение баланса
где T=1/f; = RC.
При выполнении условия (Т— tп)<, членом, содержащим е(Т-tп)/, можно пренебречь ввиду его
малости и последнюю формулу записать в виде
Отсюда следует, что крутизна преобразования зависит от емкости запоминающего
конденсатора С тока I и длительности
включения электронного
ключа. Погрешности
преобразования зависят от стабильности этих параметров. Для получения повышенной точности
входной сигнал Uc обычно преобразуют в прямоугольные импульсы с помощью компаратора
напряжений 1 (усилителя-ограничителя с большим коэффициентом усиления). Из них в блоке 2
формирования калиброванных по длительности импульсов получают сигналы, управляющие
электронным ключом. В качестве блока 2 обычно применяют прецизионные одновибраторы.
Данная структура использована в микросхеме 1108ПП1 при включении ее в схему ПЧН рис. 6.60,
б. Конденсатор С и разрядный резистор R в ней навесные. Длительность tn задается с помощью
конденсатора Сп. При С = 20 пФ, Сп = 3600 пФ, R = 34 кОм крутизна преобразования в диапазоне 0
—10 кГц равна 1 В/кГц. ПЧН можно использовать до частоты 500 кГц. На высоких частотах более
нескольких сотен кГц частотные детекторы обычно выполняют с использованием резонансных
LC-контуров. Фазовая характеристика параллельного LC-контура вблизи резонанса описывается
уравнением
где Q—добротность контура; f0 — резонансная частота; f— мгновенная частота; fр—полоса
пропускания LC-контура, определенная на уровне 0,7; f—девиация частоты, f=f—f0. Если на
один вход перемножителя напряжений подать входной сигнал Uс (, ), а на другой подать тот же
сигнал через резонансный LC-контур, то фазовый сдвиг напряжений на входах перемножителя
будет зависеть от частоты. Выходное напряжение перемножителя, на входе которого включен
фильтр низких частот, определяется из уравнения (6.183): UВЬ1Х = К3 UcUоп cos. Подставив (6.188)
в (6.183) и произведя преобразования с учетом того, что f<fр получим
Если f меняется с частотой , f=fmcost, то
Таким образом, аналоговый перемножитель, у которого фаза напряжения на одном из входов
зависит от частоты, работает как частотный детектор. В принципе можно применять и любые
другие фазосдвигающие устройства. Однако в диапазоне высоких частот они дают меньшую
стабильность фазового сдвига по сравнению с резонансными LC-контурами.
14
Эта идея использована в частотных детекторах, выполненных на микросхеме 174УРЗ. Ее
структурная схема приведена на рис. 6.61, а, а включение показано на рис. 6.61,6. Фазосдвигающий LC-контур подбирают исходя из требуемой резонансной частоты. Конденсатор Сф
выполняет роль фильтра низких частот. Наличие в микросхеме внутреннего усилителяограничителя позволяет устранить погрешности, связанные с нестабильностью уровней сигнала.
Микросхема работает до частот в несколько десятков МГц (fmах 40 МГц).
15
ЛЕКЦИЯ8
Вопросы к экзамену по курсу
«Электронные цепи и микросхемотехника»
(для специальности ПЭ, 2 семестр)
27. Триггеры. Реализация последовательностных цифровых устройства с их использованием.
28. Счетчики. Реализация последовательностных цифровых устройства с их использованием.
29. Регистры. Реализация последовательностных цифровых устройства с их использованием.
§ 8.4. ТРИГГЕРЫ
Триггерами называют устройства, имеющие два устойчивых состояния, у которых переход из
одного состояния в другое происходит вследствие регенеративного процесса.
Под р е г е н е р а т и в н ы м процессом обычно понимают переходный процесс в электрической
цепи охваченной положительной ОС с петлевым усилением Ку > 1 в широком диапазоне частот,
который характеризуется резкими изменениями токов и падений напряжений на элементах
цепи.
Переход триггера из одного устойчивого состояния в другое происходит при воздействии
управляющего сигнала и сопровождается скачкообразным изменением токов и напряжений.
Рассмотрим принцип работы симметричного триггера на транзисторах п-р-п-ттлпа., схема
которого приведена на рис. 8.17, а. Триггер представляет собой два усилителя на транзисторах
VT1 и VT2. Выход каждого усилителя соединен с входом другого. Обратная связь, получаемая в
результате такого соединения усилителей, является положительной.
В принципе в приведенной схеме возможно состояние электрического равновесия, при
котором оба транзистора VT1 и VT2 открыты и находятся в активной области. В этом случае токи
iK 1 и iK 2 равны между собой и падения напряжений на элементах схемы не изменяются в течение
времени. Однако такое состояние является неустойчивым и любые флуктуации тока или
напряжения приведут к лавинообразному процессу нарастания тока одного и убывания тока
другого транзисторов. Например, увеличение коллекторного тока iK 1 приведет к уменьшению
коллекторного напряжения UK1 транзистора VT1. Это в свою очередь, приведет к уменьшению
напряжения UB 2 и тока 16 2 транзистора VT2. Последнее вызовет уменьшение Iк2 и увеличение UK2,
UБ1. Следовательно, произойдет дальнейшее увеличение тока /к1. Процесс носит лавинообразный
1
характер и продолжается до тех пор, пока не прекратится действие положительной
обратной связи. Это возможно при запирании одного транзистора (например, VT2) или насыщении
другого (VT1). В обоих случаях триггер будет находиться в состоянии устойчивого равновесия.
Если параметры схемы выбраны так, что когда один из транзисторов закрыт, другой открыт и
насыщен, то такой триггер называют насыщенным. Если открытый транзистор находится на
границе активной области и не входит в режим насыщения, то триггер называется
ненасыщенным.
В одном из устойчивых состояний триггер может находиться как угодно долго до момента,
пока не поступит сигнал от источника внешнего управляющего напряжения. Пусть оно вводится в
цепь базы запертого коллектора VT2. Как только напряжение управляющего сигнала достигнет
уровня, при котором VT2 откроется, появится коллекторный ток 1К2 и уменьшится ток базы 1Б1.
Транзистор VT1 выйдет в активную область и будет восстановлена петля положительной обратной
связи. Возникающий при этом регенеративный процесс совершенно аналогичен описанному
выше. Он приведет к опрокидыванию триггера. В итоге транзистор VT1 закроется, а транзистор
VT2 откроется и окажется в области насыщения. Триггер перейдет во второе устойчивое
состояние. В процессе опрокидывания триггера на коллекторах транзисторов формируются
положительные и отрицательные перепады токов и напряжений.
Конденсаторы Ci и С2 включены для ускорения процесса переключения и носят название
ускоряющих. Они также выполняют роль элементов памяти о предыдущем состоянии триггера и
обеспечивают четкость его переключения в новое состояние.
Работу триггера можно рассматривать более укрупненно, представляя каждый транзистор с
соответствующими соединениями как логический элемент, выполняющий в зависимости от типа
логики функцию И-НЕ или ИЛИ-НЕ. В этом случае выход логического элемента соединен с
входом второго логического элемента и схема триггера для разных (положительной и
отрицательной) логик имеет вид, показанный на рис. 8.17, б, е. Если на выходе одного логического
элемента, например F1, имеется сигнал логической 1, то на входе другого будет также логическая
1. На выходе второго и входе первого логического элемента будет сигнал логического 0.
Логический ноль на входе первого логического элемента обеспечивает получение логической
единицы на его выходе. Следовательно, состояние триггера устойчиво. Изменение сигналов на
выходах триггера приводит к тому, что схема принимает новое устойчивое состояние, в котором
может находиться как угодно долго. Так как логические элементы И-НЕ в логике другого типа
выполняют функцию ИЛИ-НЕ, схемы рис. 8.17, б, в эквивалентны между собой.
Поскольку входной сигнал одного логического элемента является выходным сигналом другого,
т. е. UBX1 = 1/вых 2; С/вх 2 = С/вых 1, анализ свойств такой укрупненной цепи удобно проводить с помощью
передаточных (переключательных) характеристик логических элементов (рис. 8.17, г). Состояния
равновесия триггера определяются точками пересечения передаточных характеристик логических
элементов. У триггера таких точек три (/, 2, 3), причем только 1, 3 характеризуют устойчивое
состояние, так как в них транзисторы логических элементов находятся или в состоянии
насыщения, или в состоянии отсечки и положительная обратная связь отсутствует. Точка 2
характеризует неустойчивое состояние равновесия. В ней транзисторы обоих логических
элементов находятся в активной области и действует цепь положительной обратной связи. При
Ky^l малейшее отклонение от точки 2 вызывает регенеративный процесс, в результате которого
выходные сигналы триггера определяются положениями точек 1 или 3.
Для возникновения регенеративного процесса на входы логических элементов, например
второго, должны быть поданы сигналы, которые выведут транзисторы обоих ЛЭ в активную
область (С/вхпор. ^вхпор)- При этом обеспечится восстановление цепи положительной ОС,
появится регенерация и триггер перейдет в другое устойчивое состояние.
При выполнении триггерных схем на основе стандартных логических элементов процесс их
проектирования сводится к разработке схем соединения логических элементов и организации цепи
управления. Большое число комбинаций возможных внешних соединений привело к появлению
значительного количества триггерных устройств, свойства которых существенно различаются. Их
обычно классифицируют по способу записи информации и функциональному признаку.
2
Классификация по способу записи информации характеризует временную диаграмму работы.
По этому признаку триггеры подразделяют на несинхронизируемые (асинхронные) и синхронизируемые (синхронные или тактируемые).
У асинхронного триггера изменение его состояния происходит непосредственно с приходом
управляющего сигнала. В синхронизируемых кроме информационных входов, на которые
подаются управляющие сигналы, имеются входы синхронизации или, что то же самое, тактовые
входы. Изменение состояния триггера при наличии на входах информационных сигналов может
произойти только в моменты подачи на входы синхронизации соответствующих разрешающих
сигналов, причем управление может осуществляться либо потенциалом импульса, либо его
фронтом.
Основой классификации триггеров по функциональному признаку является вид логического
управления, характеризующего состояние входов и выходов триггера в момент времени до tn и
после его срабатывания tn + 1. По этому признаку триггеры подразделяют на RS-; D-; Т-; JK-типы и
т. д. Название триггера отражает особенности организации его управления и характеризует вид
логического уравнения, описывающего его функционирование при подаче электрических
сигналов. Один из выходов триггера называют прямым и обозначают буквой Q, другой —
инверсным и обозначают — Q. Состояние триггера отождествляют с сигналом на прямом выходе.
Триггер находится в единичном состоянии при Q=1, Q = 0 и нулевом — при Q = 0, Q =1.
Обозначения входов проводят исходя из состояний, в которые устанавливается триггер при
подаче на них управляющих сигналов. При этом используют следующие метки: S—вход для
раздельной установки триггера в состояние 1 (.S-вход); R — вход для раздельной установки
триггера в состояние О (R-вход); J—вход для установки состояния 1 в универсальном триггере (Jвход); К—вход для установки состояния 0 в универсальном триггере (K-вход); Т—счетный
вход (T-вход); D — информационный вход для установки триггера в состояния 1 или 0 (D-вход);
Е—дополнительный управляющий вход для разрешения приема информации*; С—управляющий
вход разрешения приема информации (вход синхронизации, С — вход или тактовый). Триггер
обозначают в виде прямоугольника, имеющего основное и дополнительные поля. Внутри
основного поля пишется буква Т или буквы ТТ, если триггер двухступенчатый; внутри
дополнительных полей записываются буквы, характеризующие входы и выходы триггера. Причем
если триггер управляется инверсным сигналом (логическим 0), то у соответствующего входа
имеется метка О- При наличии нескольких входов одного назначения допускается добавлять к
буквам цифры, например: 1, 2, CI, С2; 1, 2, 3 и т. д. Если переключение триггера осуществляется
только в момент действия фронта или среза импульса (динамическое управление), то
соответствующие входы обозначают дополнительным маленьким треугольником или косой
линией. Треугольник повернут вершиной внутрь триггера, а косая линия имеет наклон 45°, если
тот срабатывает по перепаду 0,1. Если переключение происходит по перепаду 1,0, то направление
вершины треугольника изменяется на противоположное, а косая линия проводится под углом 135°.
Выходы триггера показывают c правой стороны прямоугольника, причем инверсный выход (Q)
также обозначают кружком. Примеры условного обозначения триггера приведены на рис. 8.18, а
—ж. Следует обратить внимание на то, что хотя входы двухступенчатого триггера часто
показываются не как динамические, его переключение осуществляется в момент перепада сигнала
3
на входах. Это следует из принципа действия триггера этого типа. Поэтому двухступенчатый
триггер иногда показывают как одноступенчатый, имеющий динамические входы.
Триггер RS-типа (рис. 8.19, а) представляет собой устройство, имеющее два информационных
входа: R и S. В нем возможны два устойчивых состояния.
При R = 0 и S=] триггер принимает состояние 1 (2=1), а при R=l, S=0 — состояние О (Q = 0).
Иногда вход S называют единичным, a R — нулевым. Для триггера RS-типа. комбинация S=\; R=l
является запрещенной, так как после такой комбинации состояние триггера будет
неопределенным (X) и он может оказаться или в нуле, или в единице. Поэтому необходимо предусматривать исключение этой комбинации. Состояния RC-триггера в зависимости от входных
сигналов иллюстрирует табл. 8.4.
Как видно из рис. 8.19, а, б, соединения логических элементов таковы, что если на выходе
одного из них установится потенциал, соответствующий коду 0, то на выходе другого будет
потенциал логической единицы.
В схеме, показанной на рис. 8.19,6, триггер устанавливается в состояние 1 сигналом S = 0, а в
состояние О (Q = 0) — сигналом R = 0. Запрещенной является_ комбинация S=R = 0. Установка
данного триггера по S- и R-входам производится сигналами, уровень которых соответствует
логическому нулю. Такой RS-триггер можно назвать триггером с инверсным управлением.
Нетрудно убедиться, что_ при любом начальном состоянии триггера Qn подача на вход S кода 0
приводит к появлению 1 на выходе (2=1), а подача потенциала логического нуля на вход R
вызывает появление на выходе сигнала Q = 0. Для примера рассмотрим ход рассуждений в этом
случае. Пусть на входы S и R подана логическая 1. В этом случае в зависимости от предыдущих
сигналов возможны два состояния выхода: Qn = 0; Qn = 1 и Qn=1; Qn = 0. Напряжения кодов на
входах и выходах логических элементов, верхний из которых обозначим а, а нижний — б, можно
охарактеризовать с помощью табл. 8.5.
4
Из таблицы видно, что, в каком бы исходном состоянии ни был триггер в момент времени t„,
подача кода 0 на вход S в момент времени tn + l переводит триггер в положение 1. Аналогично,
подача на вход R нуля в момент tn + 1 обеспечивает установку триггера в положение 0. В
триггерах, показанных на рис. 8.19,6, в, установка в определенное их состояние осуществляется
кодом логической 1 (положительная логика).
Для нормальной работы триггера необходимо, чтобы длительность сигналов, действующих на
его входах, была больше задержки переключения обоих плеч триггера.
Асинхронные RS -триггеры находят ограниченное применение в качестве самостоятельных
устройств. Однако они часто входят составной частью в схемы более сложных триггеров. В ряде
случаев RS -триггеры выпускают в виде самостоятельных микросхем. Так, например, в корпусе
ИС типа 564ТР2 имеется четыре RS -триггера, имеющие свои информационные выходы Q1 — Q4
(1,2,9,10 рис. 8.19,в). Кроме того, имеется один вход Е разрешения приема информации. Если на
нем имеется логическая 1, то все триггеры работают независимо друг от друга. При логическом 0
на входе Е никакие сигналы на остальных входах триггеров не могут изменить их состояния.
Синхронизируемые (тактируемые) RS -триггеры имеют на входе каждого плеча схемы
совпадения, первые входы которых объединены и являются входами синхронизирующих
(тактирующих) импульсов. На вторые входы подают информационные сигналы. Такое включение
обеспечивает поступление на входы R и S триггера информационных сигналов только во время
действия потенциала импульсов синхронизации. Некоторые варианты синхронизируемых RS триггеров показаны на рис. 8.20, а, б.
Для примера рассмотрим работу триггера (рис. 8.20, а). Пусть триггер находится в положении
Q = 1. На вход R подан сигнал логической 1. В этом случае при подаче тактирующего импульса на
вход С верхняя схема И-НЕ сформирует на своем выходе сигнал нуля. Он вызовет появление
выходного сигнала Q равного единице, как и в асинхронном RS -триггере.
Этот сигнал подается на второй вход нижней схемы И самого триггера и фиксирует, таким
образом, ее состояние. Следовательно, по окончании тактового импульса, хотя левая верхняя
схема совпадений и закроется, состояние триггера не изменится.
Аналогично, при комбинации S=1 и С=1 триггер установится в состояние Q=1. Комбинация R
= S=C=1 является запрещенной, так как ведет к неопределенности, как и в асинхронном триггере.
Иногда используют двухтактные RS -триггеры, у которых первый импульс обеспечивает запись
информации по входу S, а второй — по входу R. Возможны варианты с одним тактируемым и
одним асинхронным входами.
Условное графическое обозначение синхронного триггера приведено на рис. 8.20, в.
Триггеры D-типа иногда называют триггерами з а д е р ж к и . У них имеется один
информационный вход D и возможны два устойчивых состояния.
Логическое уравнение, описывающее работы D -триггера, имеет вид
5
Оно показывает, что состояние D -триггера в момент времени tn + 1 совпадает с кодом входного
сигнала, действующего в момент времени tn.
Роль простейшего асинхронного D -триггера может выполнять схема, состоящая из двух или
нескольких последовательно включенных логических элементов (рис. 8.21,а), в которой входной
сигнал из-за задержки распространения в каждом логическом элементе сдвинут во времени
относительно входного сигнала.
В состав D -триггеров, применяемых на практике, обычно входят RS -триггеры, управление
которыми организовано соответствующим образом. Возможная структура такого D -триггера
показана на рис. 8.21,6. В нем вследствие задержки распространения в логических элементах
сигнал на выходе Q появляется также с определенной задержкой времени.
Действительно, если на вход D был подан сигнал 1, то на выходе триггера Q = 1, Q = 0. При
подаче на вход D кода 0 на входе S RS -триггера, входящего в D -триггер, появится код 0, а на
входе R из-за задержки распространения в логическом элементе останется код 0. Состояние
триггера не изменится. Через промежуток времени, равный t3др , на входе R появится код 1,
который изменит состояние выхода Q на 0, а выхода Q—на 1. Другими словами, выходной сигнал
повторит входной сигнал с задержкой tздр (рис. 8.21,в,г). Если теперь сигнал входа D примет
значение 1. то на выходе Q должен появиться сигнал 0. Но так как на входе R на время tздр
останется код 1, состояние триггера измениться не успеет. Через промежуток времени tздр на выходе
R появится 0, а на выходе Q установится код 1. Сигнал на выходе триггера опять повторит входной
сигнал с задержкой tздр. Данный D -триггер работоспособен в том случае, когда задержка в
элементах RS -триггера больше времени задержки дополнительно введенного элемента ИЛИ-НЕ,
так что информация не теряется при возникающих неопределенных состояниях. Состояние
триггера в различные моменты времени можно определить из табл. 8.6.
Варианты практической реализации синхронизируемых однотактных триггеров £>-типа,
выполненные на элементах И-НЕ или ИЛИ-НЕ, показаны на рис. 8.22, причем схема рис. 8.22, а
тактируется сигналами логической 1, а схема рис. 8.22,6—сигналами логического 0. На рис. 8.22, в
показано условное обозначение синхронизируемого D -триггера.
В отсутствие сигнала на входе С логические элементы DD1 и DD2 закрыты (они выполняют
роль вентилей). Информационный сигнал на входе D не меняет состояние триггера. Если подается
тактовый импульс С—1 и при этом D=1 (рис. 8.22,а), то на выходе DD1 формируется потенциал
логического 0. Этот сигнал, поступая на вход элемента, устанавливает триггер в состояние Q=1 и
одновременно блокирует включение DD2. При D = 0 и C=l DD1 останется закрытым, а на выходе
его будет логическая 1. На выходе DD2, который в этом случае открыт, появится сигнал логического нуля и триггер установится в положение Q = 0.
6
Таким образом, в триггере записывается та информация, которая была на входе D до прихода
импульса синхронизации. Для четкой работы триггера (без сбоев) необходимо, чтобы к приходу
следующего импульса синхронизации потенциалы выходов логических элементов приняли
значения, исключающие ложные срабатывания. Поэтому минимальный интервал между
импульсами синхронизации у триггеров с подобной структурой tmin = 4tздрср, а максимальная
частота включения fmax= l/tmin == 0,25tздрср, где tЗДрср — среднее время задержки распространения
сигнала одним ЛЭ.
Структура триггера не меняется, если в нем логические элементы И-НЕ будут заменены на
ИЛИ-НЕ. При этом могут меняться местами выходы, а прямые входы могут меняться на
инверсные.
При динамической синхронизации запись информации в D-триггер осуществляется в момент
действия фронта или среза импульса синхронизации (при перепаде напряжения входа С 0,1 или
1,0).
У ряда D-триггеров также имеется дополнительный вход Е (V) разрешения приема
информации (DV-триггеры). При V= 1 такие триггеры функционируют как обычные D-триггеры, а
при V=0 сохраняют исходное состояние независимо от информации на входе D. Реализовать такой
триггер можно путем введения в D-триггер дополнительного элемента И, включенного так, как
показано на рис. 8.22, г. Наличие дополнительного входа Е позволяет расширить функциональные
возможности триггера и сохранять записанную информацию при непрерывном изменении
сигналов на входах D и С. Запись информации возможна только в том случае, если на входе V
будет логическая 1.
Промышленностью выпускаются микросхемы синхронизируемых .D-триггеров с разными
функциональными возможностями. Так, в ИС типа 155ТМ7 (рис. 8.23, а) в одном корпусе имеется
четыре синхронизируемых D-триггера, причем каждая пара триггеров может синхронизироваться
своим потенциалом входа синхронизации. У ИС типа 564ТМ2 (рис. 8.23, б) в одном корпусе
имеется два триггера. Использована динамическая синхронизация перепадом сигнала 0,1. Каждый
триггер имеет входы независимой установки в состояние 0 (R1 и R2) и состояние 1 (S1 и S2). ИС
типа 155ТМ8 (рис. 8.23, в) содержит четыре D-триггера с динамической синхронизацией
7
фронтом 0,1 и инверсным входом R установки в нулевое состояние.
Триггер T-типа - — это логическая схема с двумя устойчивыми состояниями и одним
информационным входом Т, изменяющая свое состояние на противоположное всякий раз, когда на
вход Т поступает управляющий сигнал. Его часто называют триггером со счетным входом.
Основным способом построения счетных триггеров является введение соответствующих обратных
связей в тактируемые RS-и D)-триггеры.
Рассмотрим
реализацию
Т-триггера на основе схемы D-триггера с_ динамической синхронизацией. Для этого инверсный выход Q соединим с входом D, а информационный сигнал
подадим на вход С (рис. 8.24, а). Пусть исходное состояние триггера будет таким, что сигнал на
выходе Q = 0, а на выходе Q = 1. Следовательно, и сигнал на выходе D равен логической единице.
При первом же перепаде напряжений 0,1 на входе синхронизации С триггер примет единичное
состояние (Q=1), так как на его входе будет потенциал логической 1. При этом потенциалы на
выходе Q и на входе D соответствуют логическому нулю.
Так как переключение триггера происходит в течение очень короткого времени, то изменение
сигнала на входе D, происходящее с небольшой задержкой относительно момента срабатывания
триггера, не может изменить его состояния. Таким образом, первый импульс синхронизации
установит триггер в состояние 1. На его входе D будет потенциал логического 0. Поэтому
следующий перепад напряжения 0,1 на входе С установит триггер в состояние 0. Потенциал на
входе D станет равным логической 1. Таким образом, состояние триггера меняется на
противоположное при каждом перепаде импульса напряжения на входе синхронизации и триггер
как бы считает проходящие импульсы.
Подобный D-триггер нормально функционирует в том случае, если сигнал на входе D не
успевает измениться за время переключения триггера. В противном случае начнется «состязание»
или «гонки». В результате их триггер может переключиться два раза или более вследствие
быстрого изменения сигнала на входе D, которое он успевает отработать. Для исключения этого
выход соединяют с входом D через линию задержки, в качестве которой можно использовать один
или два логических элемента (рис. 8.24, б). Их задержка распространения сигнала обычно бывает
достаточной для четкой работы T-триггеров, выполненных на микросхемах любых типов.
8
У T-триггеров также может иметься дополнительный вход Е (V) разрешения приема
информации. Действие его аналогично действию .Е-входа RS- и D-триггеров. Промышленность не
выпускает самостоятельных ИС T-триггеров. Их обычно получают путем соответствующих
включений D- и RS-триггеров.
Триггер JK-типа часто называют у н и в е р с а л ь ным. Это устройства, имеющие входы J и К, у
которых нет неопределенного состояния. Если на входы J и К подаются сигналы логической
единицы, то состояние JK-триггера меняется на противоположное при каждом новом приходящем
импульсе. Другими словами, если входы J и К объединены между собой, то JК-триггер работает
как T-триггер. В остальных случаях он функционирует как триггер RS-типа. При этом вход J
эквивалентен входу S, а К—входу R. На рис. 8.25, а показана структурная схема простейшего JKтриггера. При одновременной подаче на входы J и К сигнала логической единицы триггер с
помощью соответствующих схем совпадений устанавливается в положение 1 или 0 в зависимости
от его начального состояния (т. е. ведет себя как триггер T-типа). Если сигнал подается на вход J
или К, то триггер, аналогично RS-триггеру, устанавливается соответственно в состояние 1 или 0.
Линии задержки необходимы для устранения «состязаний» сигналов. Так, если при объединенных
входах J и К за время действия входного сигнала произойдет изменение потенциала на входе
одного из входных ЛЭ, то триггер переключится дополнительно. Для устранения подобных сбоев
длительность входного сигнала должна быть меньше времени задержки распространения сбоев,
вносимых линией задержки DL.
Триггер JAT-типа универсальным называют потому, что на его основе с помощью несложных
коммутационных изменений можно получить RS- и T-триггеры (рис. 8.25, б, в, г).
В интегральной схемотехнике JAT-триггеры обычно выполняются синхронными и
двухступенчатыми. В них имеется основной триггер (первая ступень), в который записывается
проходящая информация, и вспомогательный (вторая ступень), в который переписывается
информация из основного триггера.
Построение двухступенчатого триггера разберем на примере схемы рис. 8.26, а. Он состоит
из основного триггера на логических элементах DD3, DD4 с вентилями DD1 и DD2 и
дополнительного триггера на логических элементах DD7, DD8 с вентилями DD5 и DD6.
Дополнительный триггер также является тактируемым, причем в отличие от основного он
синхронизируется потенциалом логического 0. Для этой цели в схему введен инвертор DD9 на
логическом элементе ИЛИ-НЕ.
Рассмотрим работу триггера при разных комбинациях входного сигнала. Пусть в исходном
положении триггер находится в нулевом состоянии (Q = 0). Тогда на одном из входов вентилей
DD1 и DD2 будут соответственно логическая 1 (Q = 1) и логический 0 (Q = 0). При отсутствии
тактового импульса на выходе С вентили DD1 и DD2 закрыты независимо от того, какие
сигналы на остальных входах DD1 и DD2.
Пусть на вход J подан сигнал логической 1. Тогда с приходом импульса синхронизации С-\
вентиль DD1 откроется, а вентиль DD2 останется закрытым. Одновременно закроются оба вентиля
9
DD5 и DD6 сигналом логического 0, снимаемого с выхода инвертора DD9. Сигнал логического
нуля, снимаемого с открытого вентиля DD1, записывает в основной триггер информацию,
устанавливая его в состояние 1. Тогда на одном из входов вентиля DD5 будет сигнал логической
1, а на входе вентиля DD6 — сигнал логического 0. Однако эти сигналы никак не меняют
состояние вспомогательного триггера, так как эти вентили во время действия импульса
синхронизации С=1 закрыты. По его окончании на вторых входах вентилей DD5 и DD6 появится
логическая 1, а вентили DD1 и DD2 закроются. Так как основной триггер находится в положении
1, то откроется вентиль DD5 и информация запишется во вспомогательный триггер, который
установится в положении 1 (Q = 1).
Совершенно аналогично сигнал, поданный на вход К (K=1), установит триггер в состояние
логического нуля: Q = 0.
Таким образом, в триггере данного типа изменение выходного сигнала происходит только в
моменты, когда потенциал С переходит из 1 в 0. Поэтому говорят, что эти триггеры тактируются
фронтом или срезом в отличие от триггеров, тактируемых потенциалом.
Если соединить вместе входы J и K, то триггер станет счетным и превратится в триггер T-типа.
Действительно, если триггер находится в положении 1 (Q=1), то при одновременной подаче
K=J=1 и С= 1 вентиль DD1 будет закрыт сигналом 0 (Q = 0), снимаемого с выхода триггера. Так
как открывается только вентиль DD2, триггер установится в нулевое состояние Q = 0. При этом
выходной потенциал Q = 0 блокирует вентиль DD2. Поэтому следующая комбинация J=K=C=1
переводит триггер в состояние Q=1 и т. д. Если входы J, К, С объединить между собой, то
синхронный JK-триггер будет работать как синхронный T-триггер. Тот же результат получается в
случае, если на входы J и К подать логическую 1, а счетные импульсы — на вход С.
Двухступенчатый триггер ведет себя подобно триггеру с инверсной динамической
синхронизацией, хотя и основной, и вспомогательный триггеры имеют статическое управление.
Промышленностью выпускаются JK-триггеры, имеющие разные функциональные
возможности. Так, в ИС типа 155ТВ1 (рис. 8.27, а) на входах J и К установлены трехвходовые
логические элементы И и имеются входы раздельной установки в состояние 0 (R) и состояние 1
(S). Использование этой микросхемы в качестве T-триггера показано на рис. 8.27, б, а
синхронизируемого RS-триггера — на рис. 8.27, б. Наличие логического элемента И на входах J и
К расширяет функциональные возможности микросхемы. Так, при введении дополнительных
логических элементов и использовании логики, имеющейся во входных цепях триггеров, удается
реализовать
устройства с видоизмененными уравнениями функционирования. В ряде случаев они имеют
свои названия, например триггеры типа S (при S = R=1 устанавливаются в единичное состояние),
типа R (при S = R=1l устанавливаются в нулевое состояние), типа Е (при S=R=1 не меняют своего
состояния).
Переходные процессы в триггерах, выполненных на основе интегральных логических
элементов, протекают достаточно быстро.
При ориентировочной оценке можно считать, что для каждой пары логических элементов,
соединенных так, что образуется петля положительной ОС, длительность фронта и среза равна
времени задержки распространения сигнала в этих логических элементах.
10
Из рассмотренного следует, что триггеры осуществляют запоминание информации и остаются
в заданном состоянии после прекращения действия переключающих сигналов. Поэтому они
относятся к классу устройств, которые носят название конечных а в т о м а т о в — устройств,
имеющих память об их предыдущем состоянии.
Триггеры широко используют при цифровой обработке информации в устройствах
измерительной техники, автоматики и вычислительной техники.
§ 8.5. НЕСИММЕТРИЧНЫЕ ТРИГГЕРЫ
Несимметричные триггеры часто называют т р и г г е р а м и Шмитта. По своим свойствам они
существенно отличаются от симметричных триггеров, так как у них нет памяти о предыдущем
состоянии. Несимметричный т р и г г е р — это регенеративное устройство, имеющее
гистерезисную передаточную характеристику, у которой выходной сигнал может принимать два
значения. Переход от одного уровня выходного напряжения к другому происходит скачкообразно
при определенном значении входного сигнала — напряжении срабатывания. Возвращение в
исходное состояние происходит при другом уровне входного сигнала — напряжении отпускания.
По модулю оно всегда меньше напряжения срабатывания на величину AU, характеризующую
ширину петли гистерезиса.
Подобные регенеративные устройства обычно используются для формирования резких
перепадов напряжения из сравнительно медленно меняющихся входных сигналов.
Рассмотрим работу триггера Шмитта (рис. 8.28, а). Пусть транзистор VT2 открыт и насыщен, а
транзистор VT1 закрыт. В режиме насыщения падение напряжения на транзисторе VT2 близко к
нулю. Это позволяет показать его в виде точки («стянуть» в точку) на эквивалентной схеме рис.
8.28, б. Такой прием широко применяется при анализе устройств с насыщенными ключами.
Через транзистор VT2 (рис. 8.28, б) протекает ток, создающий на резисторе R3 падение
напряжения. Параметры резисторов R3, R4, Rэ выбраны так, что напряжение UБЭ транзистора VT1
меньше порогового и он находится в области глубокой или неглубокой отсечки. Для
определенности будем считать, что падение напряжения на резисторе Rэ таково, что транзистор
VT1 находится в области глубокой отсечки и ток его базы IБ01 равен IБО1 = -IКБО1 (рис. 8.28, б).
При подаче входного напряжения UBX транзистор VT1 откроется в тот момент, когда
напряжение UБЭ транзистора VT1 станет равным пороговому. Отпирание транзистора VT1
приводит к увеличению тока через резистор RK1 и повышению падения напряжения на нем.
Соответственно потенциалы коллектора транзистора VT1 и базы транзистора VT2 понижаются.
Это приводит к уменьшению тока базы транзистора VT2 и выходу его из состояния насыщения в
11
активную область. Возникает регенерация. Уменьшение тока транзистора VT2 приводит к
снижению падения напряжения на резисторе Rэ. При этом повышается напряжение UБЭ1
и
уменьшаются потенциал его коллектора, токи базы и коллектора транзистора VT2 и
дополнительно снижается падение напряжения на резисторе Rэ. Последнее приводит к
дальнейшему увеличению тока базы транзистора VT1 и снижению потенциала его коллектора.
Процесс идет лавинообразно. В результате его транзистор VT2 попадает в область отсечки, а
транзистор VT1 насыщается или находится на границе области насыщения. Напряжение, при
котором происходит переброс триггера, называется н а п р я жением с р а б а т ы в а н и я Uсрб (рис.
8.28, в). Дальнейшее увеличение входного напряжения увеличивает только глубину насыщения
транзистора VT1, так как ток /к1 уменьшается из-за увеличения тока 1Э1 и соответствующего
увеличения падения напряжения на сопротивлении Rэ.
Если теперь уменьшать входное напряжение, то обратное опрокидывание триггера происходит
не в точке Uср6, а при несколько меньшем напряжении Uотп. Напряжение, при котором происходит
возврат триггера в исходное состояние, называется напряжением о т п у с к а н и я Uотп.
Параметры элементов схемы выбирают так, чтобы ток транзистора VT2, находящегося в
режиме насыщения [1К нас 2 ~ E/(RК2 + Rэ)]. был больше тока насыщения транзистора VT1
[IКнас1~E/(Rк1+Rэ)].
Соответственно падение напряжения Uэ на резисторе Rэ при насыщенном транзисторе VT2
больше, чем при открытом транзисторе VT1. Этим и обусловлено то, что модуль напряжения |Uотп|
всегда меньше |Uсрб|. Действительно, при напряжении Uср6 из-за меньшего падения напряжения на
резисторе Rэ напряжение (UБЭ транзистора VT1 таково, что он находится в области насыщения.
Потенциал базы транзистора VT2 составляет часть потенциала коллектора транзистора VT1.
Следовательно, транзистор VT2 находится в области глубокой отсечки. Он может открыться
только после того, как транзистор VT1 выйдет из насыщения и коллекторный ток / к 1 достаточно
уменьшится. Только тогда потенциал UK1, пониженный делителем R1, R2, станет равным
пороговому напряжению, что требуется для отпирания транзистора VT2.
В соответствии со сказанным передаточная пусковая характеристика триггера Шмита имеет
вид, показанный на рис. 8.28, в. Она соответствует режиму идеального источника напряжения на
входе триггера (Rи = 0).
При реальном источнике входного сигнала напряжения отпирания и закрывания оказываются
больше соответствующих величин Uср6 и U0Tn, а при достаточно большом сопротивлении источника
триггер вообще может перестать переключаться. Это обусловлено тем, что высокоомный
источник приближается к генератору тока. Тогда ток во входной цепи мало зависит от падения
напряжения на резисторе Rэ. Следовательно, регенерация будет отсутствовать и триггер потеряет
свои основные свойства.
Для оценки предельного значения внутреннего сопротивления источника входного сигнала
используют входную характеристику триггера (рис. 8.28, г). Ее снимают, задавая значение
входного тока от генератора с высоким выходным сопротивлением.
Таким образом, различие в уровнях срабатывания и отпускания является необходимым
условием работы цепи в триггерном режиме.
12
Следует обратить внимание на некоторую возможную нестабильность уровней срабатывания и
отпускания. Их разброс и дрейф обусловлены разбросом параметров и старением элементов цепи,
а также влиянием внешних условий, особенно температуры. Эти возможные нестабильности
уровней необходимо учитывать при использовании триггеров Шмитта на транзисторах в качестве
различных сравнивающих устройств.
Триггеры Шмитта выпускаются в виде самостоятельных микросхем в составе отдельных
серий, например типа К155ТЛ1, К155ТЛ2, К155ТЛЗ, 564ТЛ1 и др. В их входную цепь часто
включен логический элемент И, расширяющий функциональные возможности интегральной
схемы. Так, в микросхеме 564ТЛ1 (рис. 8.29, Й) в одном корпусе выполнены четыре триггера
Шмита. На входе триггеров установлен двухвходовой элемент И, а на каждом выходе — инвертор
сигнала, уменьшающий влияние сопротивления нагрузки на значение и форму выходного сигнала.
Напряжение срабатывания у триггеров на биполярных транзисторах (серии 155, 133) около 1,5 В.
Напряжение отпускания около 1 В. У триггеров серий КМОП (564, 176) напряжения срабатывания
и отпускания зависят от напряжения источника питания. Так, у 564ТЛ1 Ucp6 равны 2,9, 5,2,
7,3 В при напряжениях питания 5, 10 и 15 В. Соответственно напряжения отпускания равны 0,7,
1,0, 1,3 В.
Интегральные триггеры Шмитта устанавливают перед логическими элементами в тех случаях,
когда им приходится работать с входными сигналами, имеющими значительную длительность
фронтов. В этих случаях триггеры Шмитта повышают крутизну нарастания сигналов,
«предохраняют» ЛЭ от длительного нахождения в активном режиме, в котором те могут
самовозбудиться, и подвергаются повышенному действию помех.
При необходимости получить повышенную стабильность напряжений срабатывания и
отпускания триггеры Шмитта выполняют на операционных усилителях, например так, как
показано на рис. 8.29, б. Уровень входного сигнала его срабатывания определяется значением
напряжения Е0. Его можно легко регулировать в широких пределах.
Рассматриваемый триггер Шмитта представляет собой ОУ, охваченный положительной ОС с
помощью резисторов R2, R3. Коэффициент ОС = R2/(R2 + R3).
Из теории обратной связи известно, что усилитель, охваченный положительной ОС, переходит
в автогенераторный режим или становится регенеративным устройством при выполнении условия
К>1. Следовательно, если R2/(R2 + R3)>1/K, то данное устройство будет обладать
регенеративными свойствами и выходная характеристика будет релейной.
Пусть на инвертирующий вход подано входное напряжение, существенно меньшее Е0. Тогда
ОУ находится в состоянии, в котором ивых = ивых max . Значение этого напряжения определяется
типом ОУ и напряжениями питания
Если пренебречь влиянием синфазного сигнала, то можно считать, что выходной сигнал ОУ
начнет изменяться в том случае, если между его входами будет разность напряжений, меньшая
где Куи — коэффициент усиления ОУ.
Таким образом, если входное напряжение UBX будет меняться, то в тот момент, когда разность
напряжений между входами станет меньше U1; напряжение на выходе ОУ изменится. ОУ выйдет
из состояния насыщения и вследствие действия цепи положительной ОС начнет регенеративный
процесс. Так как на неинвертирующем входе напряжение равно Uн 1, то регенерация начнется в
момент времени, когда
13
В результате процесса регенерации ОУ окажется снова в состоянии насыщения, но выходное
напряжение будет уже противоположного знака и равно -ивыхтах. Процесс регенерации протекает
следующим образом: как только входное напряжение стало равным Uвх 1 усилитель выходит из
насыщения. Выходное напряжение начинает уменьшаться, снижая напряжение на
неинвертирующем входе. Это приводит к уменьшению разности потенциалов между входами и
дальнейшему снижению выходного напряжения. После того как выходное напряжение перейдет
нулевое значение, разность потенциалов между входами начнет возрастать по модулю, но
полярность меняется на противоположную. Процесс протекает лавинообразно, и в итоге
усилитель «попадает» в насыщение по другой полярности. На входе ОУ, который не инвертирует
входной сигнал, установится напряжение
Это состояние будет устойчивым при всех значениях входного напряжения, больших UBX 1.
Если теперь уменьшить входное напряжение, то выходное напряжение не изменит своего
значения до момента, пока ОУ не выйдет из насыщения, что имеет место при дифференциальном
сигнале ОУ:
Процесс регенерации, обусловленный выходом ОУ в активную область, начнется при
Подставив (8.20) в (8.21), получим
Разные входные напряжения, при которых формирователь срабатывает, говорит о наличии
гистерезиса, аналогичного гистерезису у триггера Шмитта. Ширина петли гистерезиса
определится разностью входных напряжений Uвх 1 и Uвх 2.
Как видно из выражения (8.23), ширина петли гистерезиса зависит от напряжений Uв+ыхтах и
t/вштаи а также от коэффициента обратной связи. Если у=1/К, то гистерезис отсутствует совсем,
так как выражение, стоящее во вторых скобках в (8.23), обращается в нуль. Если у^>\/К, то (8.23)
можно упростить и записать в виде
Таким образом, передаточная характеристика формирователя имеет вид, показанный на рис.
8.29, в.
Напряжение Е0 смещает середину петли гистерезиса, практически не меняя ее ширины,
зависящей от коэффициента обратной связи у и уровней ограничения ОУ. Следует обратить
внимание на то, что при очень малом у коэффициент усиления ОУ влияет на ширину петли
гистерезиса.
Нестабильность напряжений Uв+ыхтах и U~выхтaх приводит к изменению ширины петли
гистерезиса и изменениям уровней срабатывания и отпускания. Этого недостатка лишен формирователь, схема которого показана на рис. 8.29, д. В нем напряжение ОС стабилизировано по обеим
полярностям с помощью стабилитронов VD1 и VD2. При этом все полученные выше уравнения
14
остаются справедливыми, только в них вместо Uв+ыхтах и U-выхmах необходимо подставить
напряжение стабилизации соответствующего стабилитрона, добавляя к нему падение уравнения на
стабилитроне, который при данной полярности выходного напряжения выполняет функции
открытого диода.
Возможны и другие схемы выполнения формирователей с характеристиками типа триггера
Шмита, например такие, как показано на рис. 8.29, д.
У формирователя (рис. 8.29, д) в цепь обратной связи включен диод VD. Введение его
приводит к тому, что один уровень срабатывания для уменьшающегося UВх приблизительно равен
Е0. Другой уровень, для увеличивающегося UBX, определяется из выражения
Если значения входного напряжения меньше второго уровня срабатывания, то цепь работает
как «защелка». Действительно, стоит только раз входному напряжению уменьшиться до значения
ниже Е0, как формирователь сработает и останется в этом положении до тех пор, пока не будет
подан входной сигнал, больший второго уровня срабатывания формирователя.
15
§ 1.6.0 некоторых типовых ситуациях при построении узлов и устройств на стандартных ИС
Разработанная проектировщиком функционально-логическая схема подлежит далее
реализации на наборе стандартных ИС той или иной серии или на наборе библиотечных
элементов той или иной БИС/СБИС с программируемой структурой. В обоих случаях
возможны несовпадения элементов подлежащей изготовлению схемы и имеющихся для ее
реализации. Типовыми ситуациями здесь являются наличие у имеющихся элементов "лишних"
(неиспользуемых в данном случае) входов, наличие в корпусах ИС лишних элементов или,
напротив, нехватка у имеющихся элементов необходимого числа входов или нагрузочной
способности.
Режимы неиспользуемых входов
Вопрос о режиме "лишних" входов решается с учетом конкретного типа используемой
схемотехнологии.
Пусть, например, нужно получить конъюнкцию (или ее инверсию) пяти переменных. В
стандартных сериях нет соответствующих элементов с пятью входами, и придется взять
элемент с восемью входами, у которого окажется три "лишних" входа. Принципиально
возможно поступить следующим образом: не обращать внимания на "лишние" входы (т. е.
оставить их разомкнутыми), подсоединить их к задействованным входам или подать на них
некоторые константы. С точки зрения логических операций все три возможности правомерны
(рис. 1.19, а). Если же учесть особенности той или иной схемотехнологии, то выбор варианта
действий становится определенным. Для ЭСЛ решение такое: неиспользуемые входы остаются
разомкнутыми. Это объясняется тем, что в схемах самих элементов уже предусмотрены специальные резисторы, связанные с источником питания, которые обеспечивают необходимые
условия "лишним" входам.
Для КМОП и ТТЛ(Ш) неиспользуемые входы разомкнутыми не оставляют. Для КМОП это
строгая рекомендация, т. к. у них очень велики входные сопротивления и, следовательно, на
разомкнутые входы легко наводятся паразитные потенциалы, которые могут изменять работу
схемы. Для ТТЛ(Ш) строгого запрета на оставление разомкнутых входов нет, но это делать
незачем, т. к. вследствие этого пострадают параметры быстродействия элемента.
Подсоединение "лишних" входов к задействованным для КМОП и ТТЛ(Ш) принципиально
возможно, но нежелательно, т. к. оно приводит к увеличению нагрузки на источник сигнала,
что также сопровождается уменьшением быстродействия источника сигнала.
Таким образом, для КМОП и ТТЛ(Ш) режим неиспользуемых входов.— подсоединение их к
константам (логическим единицам или пулям), не изменяющим работу схемы для
задействованных входов. При этом уровни напряжений U1 и U0 для КМОП совпадают с
уровнями Ucc и "земли", к которым и подключают неиспользуемые входы. У элементов ТТЛ(Ш)
уровень U1 на 1,5...2 В ниже уровня Ucc, поэтому для предотвращения пробоев неиспользуемые
входы подключают к источнику питания Ucc через резисторы R, (обычная рекомендация: R = I
кОм)5 причем к одному резистору разрешается подключать до 20 входов.
Примеры, иллюстрирующие перечисленные способы подключения неиспользуемых
выводов ИС, показаны на рис. 1.19, б. Сигналы логической единицы можно получать от
специального элемента (рис. 1.19, в), причем, если это мощный элемент, то он может иметь
коэффициент разветвления до 30.
Режимы неиспользуемых элементов
Если не все элементы, имеющиеся в корпусе ИС, использованы в схеме, тс
неиспользованные также подключены к напряжению питания, которое является общим для
всего корпуса. Если же мощности, потребляемые элементами в состояниях нуля и единицы, не
равны, то имеет смысл поставить неиспользуемый элемент в состояние минимальной
мощности, подав на какой-либо из его входов соответствующую константу.
Наращивание числа входов
Для элементов И и ИЛИ это не представляет трудностей: для получения нужного числа
входов берется несколько элементов, выходы которых объединяются далее элементом того же
типа. Наращивание числа входов для операций И-НЕ, ИЛИ-НЕ, в сущности, производится
аналогичным методом, но в схеме появляются дополнительные инверторы (рис. 1.20, а). На
этом рисунке звездочка обозначает операцию Шеффера или Пирса.
Снижение нагрузок на выходах логических элементов
Это может понадобиться, если нагрузки превышают допустимые значения, а также для
повышения быстродействия схем, на которое нагрузки элементов оказывают самое
непосредственное влияние. Чем больше число нагрузок у элемента — источника сигнала (или
нестандартная внешняя нагрузка), тем большее время тратится на достижение выходным
сигналом порогового уровня при переключении, т. е. на изменение его логического состояния.
Для предотвращения потерь быстродействия из-за нагрузок на выходах сильно нагруженных
элементов применяют буферизацию или разделение нагрузки (рис. 1.20, 6, в).
Введение буферных каскадов ускоряет работу источника сигнала, но вносит собственную
задержку в тракт передачи сигнала. Будет ли в конечном счете эффект ускорения, определяется
конкретным расчетом.
При разделении нагрузки новые элементы с задержками в тракт передачи сигнала не
вводятся, но увеличивается нагрузка на тот источник сигнала, который питает
рассматриваемую схему. Поэтому и здесь эффективность приема должна оцениваться
конкретным расчетом.
Глава 2
Функциональные узлы комбинационного типа
§ 2.1. Введение в проблематику проектирования ЦУ комбинационного типа
Функциональные узлы выполняют типовые для цифровых устройств микрооперации.
Микрооперации соответствуют низшему иерархическому уровню внутреннего языка
цифрового устройства, они обозначены в этом языке и не содержат других операций,
обозначенных в нем.
Как и все цифровые устройства вообще, функциональные узлы делятся на комбинационные
и последовательностные. В дальнейшем комбинационные узлы будем обозначать через КЦ
(комбинационные цепи), а последовательностные через АП (автоматы с памятью) Различия
между КЦ и АП имеют фундаментальным характер.
Выходные величины КЦ зависят только от текущего точения входных величин
(аргументов). Предыстория значения не имеет. После завершения переходных процессов в КЦ
на их выходах устанавливаются выходные величины, на которые характер переходных
процессов влияния не оказывает. С этой точки зрения переходные процессы в КЦ не опасны.
Но в ЦУ в целом КЦ функционируют совместно с АП, что кардинально меняет ситуацию. Во
время переходных процессов на выходах КЦ появляются временные сигналы, не предусмотренные описанием работы КЦ и называемые рисками. Со временем они исчезают, и выход
КЦ приобретает значение, предусмотренное логической формулой, описывающей работу цепи.
Однако риски могут быть восприняты элементами памяти АП, необратимое изменение
состояния которых может радикально изменить работу ЦУ, несмотря на исчезновение сигналов
рисков на выходе КЦ.
Различают статические и динамические риски. Статические риски — это кратковременные
изменения сигнала, который должен был бы оставаться неизменным (единичным или нулевым,
соответственно чему говорят о 1-риске или 0-риске). Если согласно логике работы КЦ
состояние выхода должно измениться, но вместо однократного перехода происходят многократные, то имеет место динамический риск. При динамических рисках первый и последний
переходы всегда совпадают с алгоритмическими, предусмотренными логикой работы схемы.
Статический риск такого свойства не имеет и считается более неблагоприятным.
Простейший пример (рис. 2.1, а) соответствует выработке функции "константа 1" по
формуле F = хх - 1. В статике при любом значении х на одном из входов элемента И-НЕ
имеется логический нуль, обеспечивающий адиничное значение выхода. В переходных
процессах возможен статический 1-риск.
Рис. 2.1. Схема, иллюстрирующая механизм возникновения статического риска в
комбинационной цепи (а), и временные диаграммы ее работы {б, в, г)
Не учитывая задержку элемента 3, которая здесь не играет роли, рассмотрим временные
диаграммы переходных процессов для случаев равенства задержек элементов 1 и 2 (Ь% - Ьг)
(рис. 2.1, б), а также их неравенства (t3i < h? и tai>ta2), показанные на рис. 2.1, в, г. Видно, что
при различных задержках элементов возникает статический риск после положительного или
отрицательного перепада входного сигнала в зависимости от того, задержка какого элемента
больше.
Для исключения возможных сбоев в работе ЦУ из-за явлений риска имеются два пути.
Первый состоит в синтезе схем, свободных от рисков, и требует сложного анализа
процессов в схеме и введения избыточных элементов для исключения рисков. Этот путь редко
используется в практике.
Второй путь, основной для современной схемотехники, предусматривает запрещение
восприятия сигналов КЦ элементами памяти на время переходных процессов. Прием
информации с выходов КЦ разрешается только специальным сигналом синхронизации,
подаваемым на элементы памяти после окончания переходных процессов в КЦ. Таким образом,
исключается воздействие ложных сигналов на элементы памяти. Иными словами, основная
идея здесь может быть выражена словами "переждать неприятности". Соответствующие
структуры называются синхронными.
Для определения временного интервала, на котором проходят переходные процессы,
следует оценить задержки на путях распространения сигналов от входов к выходам КЦ. Для
примера рассмотрим рис. 2.2. Нужно взять пути с минимальной и максимальной задержками.
Если на входе КЦ изменение аргументов произошло в нулевой момент времени, то по самому
короткому пути до выхода F3 сигнал может пройти за время t1, которое и обозначит начало
интервала переходных процессов. На самом длинном пути (до выхода Fj) сигнал задержится не
более чем на время t3, по истечении которого переходные процессы завершатся.
В обшем случае нужно оценить задержку сигнала па самом коротком пути как сумму
минимальных задержек элементов, составляющих этот путь, и задержку на самом длинном
пути как сумму максимальных.
Из приведенного примера видно, что для расчета переходных процессов и ЦУ нужны
сведения о минимальных и максимальных значениях задержек элементов. К сожалению,
изготовитель часто указывает только максимальные значения задержек, нередко приводятся
максимальные и типовые значения и крайне редко имеются сведения о минимальных Наиболее
полно описывались бы задержки статистическими характеристиками, но они, как правило,
неизвестны.
Если даны только максимальные задержки, то теряется возможность сравнивать времена
прохождения сигналов в разных цепях (в любой цепи задержка может быть сколь угодно
малой), а это затрудняет оценку работоспособности схем и может вынудить принять не лучшие
схемотехнические решения. Для цепей из элементов с независимыми задержками отношение t,
max/t-min равно обычно 2...3, для элементов одного кристалла между задержками элементов
возникает сильная корреляция, и отношение может существенно снижаться.
В состав ЦУ, как правило, входят типовые функциональные узлы и некоторое количество
логических схем, специфичных для данного конкретного проекта (как иногда говорят —
произвольной логики) Проектирование произвольной логики комбинационного типа
производится по этапам. Прежде всего, задается характер функционирования КЦ. Это может
быть сделано различными способами, чаще всего пользуются таблицами функционирования
(таблицами истинности), задающими значение искомых функций на всех наборах аргументов.
От таблицы легко перейти к СДНФ искомых функций (СДНФ — совершенная дизъюнктивная
нормальная форма, т. е. дизъюнкция конъюнктивных членов одинаковой размерности). Для
этого составляют логическую сумму тех наборов аргументов, на которых функция принимает
единичное значение.
Например, для подлежащей воспроизведению функции четырех аргументов, заданной табл.
2.1, получим
Дальнейшие действия зависят от средств реализации функций, к которым в
современной схемотехнике относятся:
1. Логические блоки табличного типа (LUTs, Look-Up Tables).
2. Логические блоки в виде последовательности матриц элементов И и ИЛИ (PLA,
Programmable Logic Array; PAL, Programmable Array Logic).
3. Универсальные логические блоки на основе мультиплексоров.
4. Логические блоки, собираемые из логических элементов некоторого базиса (SLC, Small
Logic Cells).
Если КЦ будет реализована на основе логических блоков табличного типа, то СДИФ явится
окончательным выражением функции, и никаких дальнейших преобразований этой формы не
потребуется. Дело в том, что табличный блок представляет собою память, в которой имеется
столько ячеек, сколько необходимо для хранения всех значений функций, т. е. 2 т, где т — число
аргументов функции Набор аргументов является адресом той ячейки, в которой хранится
значение функции на этом наборе (0 или 1). СДНФ как раз и содержит все адреса, по которым
нужно хранить единичные значения функции. Если искомая функция выражена в какой-либо
сокращенной форме, то следует перевести ее в СДНФ. Для этого конъюнктивные члены, не
содержащие переменной х;, умножаются на равную единице дизъюнкцию XjVXj. Например,
Блок памяти для воспроизведения функции m переменных имеет вид рис. 2.3, а. Если
требуется воспроизвести п функций, то в каждой ячейке нужно будет хранить п бит (по одному
биту для каждой функции), и блок памяти будет организован, как показано на рис. 2.3, б.
Если размерность блоков табличного типа такова, что не позволяет получить искомую
функцию с помощью одного блока, т е число входов блока памяти меньше числа аргументов
функций, то появляется необходимость решения сложной задачи выражения искомой функции
через подфункции с меньшим числом аргументов
Если данный проект реализуется на логических блоках, в виде последовательно включенных
матриц элементов И и ИЛИ либо их эквивалента в другом базисе, то исходную СДНФ можно
минимизировать, если, конечно, возникает такая необходимость. Логические блоки с
матрицами И и ИЛИ воспроизводят системы переключательных функций и имеют параметры:
число входов, выходов и термов. Число входов (аргументов воспроизводимых функций) и
число выходов (самих функций) от формы выражения функций не зависят и предопределены
заданием. Число термов (имеются в виду конъюнктивные гермы) зависит от формы
представления функций системы. Если число термов при данной форме представления функций
превышает возможности логического блока, то возникает вопрос о минимизации функций.
Целью минимизации будет сокращение числа конъюнктивных термов в данной системе
функций, т. е. поиск кратчайших дизъюнктивных форм. Практически это сводится к поиску
минимальных форм дизъюнктивных нормальных форм (ДНФ), о чем говорится далее, и оiбору
среди них вариантов с достаточно малым числом термов.
Как только находится форма с достаточно малым числом термов, поиск других форм можно
прекратить, т. к. дальнейшее уменьшение числа термов системы эффекта не даст: сложность
аппаратных средств воспроизведения системы уже не уменьшится. Разумеется, речь идет о
реализациях на уже выбранных средствах, а не о том, что могут быть применены иные логические блоки — того же типа, но иной размерности.
Логические блоки на основе мультиплексоров рассмотрены в §2.5 после ознакомления с
самими ИС мультиплексоров.
Синтез КЦ на логических блоках типа SLC, т. е. на вентильном урон не, является самым
традиционным и изученным (термином "вентиль" называют базовые логические ячейки,
выполняющие простейшие операции, для многих И С эту роль играют элементы И-НЕ с
двумя-тремя входами). В этом варианте проектирование КЦ содержит следующие этапы П
минимизацию логических функций; □ переход к заданному логическому базису.
Минимизация в широком смысле слова — такое преобразование логических функций,
которое упрощает их в смысле заданного критерия. Исторически первым было стремление
минимизировать число логических элементов в схеме (элементы были наиболее дорогими
компонентами устройств), что приводит к критерию сложности схемы в виде числа букв в
реализуемых выражениях. Этот критерий учитывается так называемой ценой по Квайну —
суммарным числом входов всех логических элементов схемы. Для минимизации по этому
критерию разработано несколько методов, в их числе как аналитические, основанные на
преобразованиях математических выражений, так и графические, основанные на применении
специальных карт (карт Карно, динфамм Вейча), удобных в использовании, если число
аргументов функции не превышает 6.
С переходом на ИС и ростом уровня их интеграции критерием аппаратной сложности ЦУ
стала площадь, затрачиваемая на их размещение. При этом для ИС, реализуемых
непосредственно на кристалле, площадь имеет прямой физический смысл и измеряется чаше
всего в квадратных миллиметрах. Для устройств, реализуемых на печатной плате, "площадь"
измеряется числом корпусов в составе ЦУ. Так как корпуса ИС неодинаковы, их следует приводить к некоторым эквивалентным корпусам. Приведение учитывает число выводов корпуса,
так, например, корпус с 24 выводами в 1,5 раза сложнее корпуса с 16 выводами. Понятно, что
операции приведения соответствует оценка суммарной площади корпусов ЦУ по общему числу
всех выводов корпусов ИС.
Минимизация по числу букв в реализуемом выражении перестала точно соответствовать
новому критерию, хотя между обоими критериями сохраняется известная связь.
Следующий этап проектирования — переход к заданному логическому базису от исходных
выражений, которые обычно получают в булевском базисе (И. ИЛИ, НЕ). Правила такого
перехода известны, они основаны на применении теоремы де-Моргана. В частности, для
перехода к базису И-НЕ используется соотношение
а для перехода к базису Пирса удобно вначале получить исходную булевскую форму для
инверсии искомой функции, а затем от нес перейти к базису ИЛИ-НЕ по соотношениям
Традиционные методы минимизации функций алгебры логики приводят к каноническим их
формам, соответствующим двухъярусной (если входные переменные заданы и прямыми и
инверсными значениями) реализации путем последовательного выполнения операций И и ИЛИ.
Переход к базисам И-НЕ и ИЛИ-НЕ ярусность схем не изменяет. Для построения простых схем
или схем на некоторых видах программируемой матричной логики такое представление может
служить в качестве окончательного варианта. Для некоторых задач каноническое
представление может оказаться слишком громоздким. Для упрощения выражений можно
применять к ним факторизацию (вынесение общих множителей за скобки и группирование
членов), различного рода эквивалентные подстановки и др. Упрощение функций путем
факторизации может дать большой эффект, но при этом увеличивается ярусность схем и.
следовательно, возрастает задержка в выработке результата. Возможные преобразования
функций порождают необозримое множество вариантов, причем наиболее ценные отнюдь не
лежат на поверхности. При поиске таких вариантов проектировщик не имеет теоретических
подсказок и действует эвристически.
К проблематике проектирования ЦУ относится и вопрос о критериях их качества.
Поскольку одну и ту же задачу можно решить многими способами, возникают альтернативные
варианты проекта, которые нужно уметь сравнивать между собой. Объективная сложность
сравнительной оценки вариантов обусловлена тем, что при этом имеет значение целый набор
свойств для каждого варианта — частных критериев его качества. Каждый частный критерий
имеет ясный, определенный смысл (аппаратная сложность, быстродействие, потребляемая
мощность, помехоустойчивость и др.), но не может исчерпывающим образом охарактеризовать
вариант. А чтобы учесть несколько частных критериев качества, нужно сформировать общий
критерий (интегральный, многоцелевой, функцию качества, функцию ценности).
Формирование такого критерия — чрезвычайно ответственная задача, не имеющая
формального решения. В любую форму общего критерия качества входят коэффициенты,
назначаемые субъективно. Таким образом, возникает ситуация, когда для оценки устройства
применяется критерий, а для него самого оценки качества не существует. Поэтому в практике
проектирования сложные общие критерии качества не популярны. Достаточно признанным
можно, пожалуй, считать лишь критерий AT, где А — аппаратная сложность устройства, Т —
время решения задачи. Да и то здесь так же проявляется общий недостаток, свойственный всем
общим критериям — в них может происходить взаимная компенсация частных критериев, и
уменьшение одного может быть скомпенсировано ростом другого, что формально равноценно,
но не всегда разумно.
ЛЕКЦИЯ №8
ТРИГГЕРЫ
Триггерами (английское — Trigger или Flip-Flop) называют устройства, имеющие два
устойчивых состояния, у которых переход из одного состояния в другое происходит вследствие
регенеративного процесса.
Под р е г е н е р а т и в н ы м процессом обычно понимают переходный процесс в электрической
цепи охваченной положительной ОС с петлевым усилением Ку > 1 в широком диапазоне частот,
который характеризуется резкими изменениями токов и падений напряжений на элементах цепи.
Переход триггера из одного устойчивого состояния в другое происходит при воздействии
управляющего сигнала и сопровождается скачкообразным изменением токов и напряжений.
Рассмотрим принцип работы симметричного триггера на транзисторах п-р-п-типа., схема
которого приведена на рис. 8.1, а. Триггер представляет собой два усилителя на транзисторах VT1
и VT2. Выход каждого усилителя соединен с входом другого. Обратная связь, получаемая в
результате такого соединения усилителей, является положительной.
Рис. 8.1. Симметричный триггер.
В принципе в приведенной схеме возможно состояние электрического равновесия, при
котором оба транзистора VT1 и VT2 открыты и находятся в активной области. В этом случае токи
iK1 и iK2 равны между собой и падения напряжений на элементах схемы не изменяются в течение
времени. Однако такое состояние является неустойчивым и любые флуктуации тока или
напряжения приведут к лавинообразному процессу нарастания тока одного и убывания тока
другого транзисторов. Например, увеличение коллекторного тока iK1 приведет к уменьшению
коллекторного напряжения UK1 транзистора VT1. Это в свою очередь, приведет к уменьшению
напряжения Uб2 и тока I62 транзистора VT2. Последнее вызовет уменьшение Iк2 и увеличение UK2,
UБ1. Следовательно, произойдет дальнейшее увеличение тока Iк1. Процесс носит лавинообразный
характер и продолжается до тех пор, пока не прекратится действие положительной обратной
связи. Это возможно при запирании одного транзистора (например, VT2) или насыщении другого
(VT1). В обоих случаях триггер будет находиться в состоянии устойчивого равновесия.
Если параметры схемы выбраны так, что когда один из транзисторов закрыт, другой открыт и
насыщен, то такой триггер называют насыщенным. Если открытый транзистор находится на
границе активной области и не входит в режим насыщения, то триггер называется
ненасыщенным.
В одном из устойчивых состояний триггер может находиться как угодно долго до момента,
пока не поступит сигнал от источника внешнего управляющего напряжения. Пусть оно вводится в
1
цепь базы запертого коллектора VT2. Как только напряжение управляющего сигнала достигнет
уровня, при котором VT2 откроется, появится коллекторный ток IК2 и уменьшится ток базы IБ1.
Транзистор VT1 выйдет в активную область и будет восстановлена петля положительной обратной
связи. Возникающий при этом регенеративный процесс совершенно аналогичен описанному
выше. Он приведет к опрокидыванию триггера. В итоге транзистор VT1 закроется, а транзистор
VT2 откроется и окажется в области насыщения. Триггер перейдет во второе устойчивое
состояние. В процессе опрокидывания триггера на коллекторах транзисторов формируются
положительные и отрицательные перепады токов и напряжений.
Конденсаторы C1 и С2 включены для ускорения процесса переключения и носят название
ускоряющих. Они также выполняют роль элементов памяти о предыдущем состоянии триггера и
обеспечивают четкость его переключения в новое состояние.
Работу триггера можно рассматривать более укрупненно, представляя каждый транзистор с
соответствующими соединениями как логический элемент, выполняющий в зависимости от типа
логики функцию И-НЕ или ИЛИ-НЕ. В этом случае выход логического элемента соединен с
входом второго логического элемента и схема триггера для разных (положительной и
отрицательной) логик имеет вид, показанный на рис. 8.1, б, е. Если на выходе одного логического
элемента, например F1, имеется сигнал логической 1, то на входе другого будет также логическая
1. На выходе второго и входе первого логического элемента будет сигнал логического 0.
Логический ноль на входе первого логического элемента обеспечивает получение логической
единицы на его выходе. Следовательно, состояние триггера устойчиво. Изменение сигналов на
выходах триггера приводит к тому, что схема принимает новое устойчивое состояние, в котором
может находиться как угодно долго. Так как логические элементы И-НЕ в логике другого типа
выполняют функцию ИЛИ-НЕ, схемы рис. 8.1, б, в эквивалентны между собой.
Поскольку входной сигнал одного логического элемента является выходным сигналом другого,
т. е. UBX1 = Uвых2; Uвх2 = Uвых1, анализ свойств такой укрупненной цепи удобно проводить с помощью
передаточных (переключательных) характеристик логических элементов (рис. 8.1, г). Состояния
равновесия триггера определяются точками пересечения передаточных характеристик логических
элементов. У триггера таких точек три (1, 2, 3), причем только 1, 3 характеризуют устойчивое
состояние, так как в них транзисторы логических элементов находятся или в состоянии
насыщения, или в состоянии отсечки и положительная обратная связь отсутствует. Точка 2
характеризует неустойчивое состояние равновесия. В ней транзисторы обоих логических
элементов находятся в активной области и действует цепь положительной обратной связи. При
Ky>1 малейшее отклонение от точки 2 вызывает регенеративный процесс, в результате которого
выходные сигналы триггера определяются положениями точек 1 или 3.
Для возникновения регенеративного процесса на входы логических элементов, например
второго, должны быть поданы сигналы, которые выведут транзисторы обоих ЛЭ в активную
область. При этом обеспечится восстановление цепи положительной ОС, появится регенерация и
триггер перейдет в другое устойчивое состояние.
При выполнении триггерных схем на основе стандартных логических элементов процесс их
проектирования сводится к разработке схем соединения логических элементов и организации цепи
управления. Большое число комбинаций возможных внешних соединений привело к появлению
значительного количества триггерных устройств, свойства которых существенно различаются. Их
обычно классифицируют по способу записи информации и функциональному признаку.
Классификация по способу записи информации характеризует временную диаграмму работы.
По этому признаку триггеры подразделяют на несинхронизируемые (асинхронные) и
синхронизируемые (синхронные или тактируемые).
У асинхронного триггера изменение его состояния происходит непосредственно с приходом
управляющего сигнала. В синхронизируемых кроме информационных входов, на которые
подаются управляющие сигналы, имеются входы синхронизации или, что то же самое, тактовые
входы. Изменение состояния триггера при наличии на входах информационных сигналов может
произойти только в моменты подачи на входы синхронизации соответствующих разрешающих
сигналов, причем управление может осуществляться либо потенциалом импульса, либо его
фронтом.
2
Основой классификации триггеров по функциональному признаку является вид логического
управления, характеризующего состояние входов и выходов триггера в момент времени до tn и
после его срабатывания tn + 1. По этому признаку триггеры подразделяют на RS-; D-; Т-; JK-типы и
т. д. Название триггера отражает особенности организации его управления и характеризует вид
логического уравнения, описывающего его функционирование при подаче электрических
сигналов. Один из выходов триггера называют прямым и обозначают буквой Q, другой —
инверсным и обозначают — Q cо значком инверсии. Состояние триггера отождествляют с
сигналом на прямом выходе. Триггер находится в единичном состоянии при Q=1 и нулевом —
при Q = 0.
Рис. 8.2. Разновидности триггеров.
Обозначения входов проводят исходя из состояний, в которые устанавливается триггер при
подаче на них управляющих сигналов. При этом используют следующие метки: S—вход для
раздельной установки триггера в состояние 1 (S-вход); R — вход для раздельной установки
триггера в состояние О (R-вход); J—вход для установки состояния 1 в универсальном триггере (Jвход); К—вход для установки состояния 0 в универсальном триггере (K-вход); Т—счетный вход
(T-вход); D — информационный вход для установки триггера в состояния 1 или 0 (D-вход); Е—
дополнительный управляющий вход для разрешения приема информации; С—управляющий вход
разрешения приема информации (вход синхронизации, С — вход или тактовый). Триггер
обозначают в виде прямоугольника, имеющего основное и дополнительные поля. Внутри
основного поля пишется буква Т или буквы ТТ, если триггер двухступенчатый; внутри
дополнительных полей записываются буквы, характеризующие входы и выходы триггера. Причем
если триггер управляется инверсным сигналом (логическим 0), то у соответствующего входа
имеется метка в виде кружка При наличии нескольких входов одного назначения допускается
добавлять к буквам цифры, например: 1, 2, CI, С2; 1, 2, 3 и т. д. Если переключение триггера
осуществляется только в момент действия фронта или среза импульса (динамическое управление),
то соответствующие входы обозначают дополнительным маленьким треугольником или косой
линией. Треугольник повернут вершиной внутрь триггера, а косая линия имеет наклон 45°, если
тот срабатывает по перепаду 0,1. Если переключение происходит по перепаду 1,0, то направление
вершины треугольника изменяется на противоположное, а косая линия проводится под углом 135°.
Выходы триггера показывают c правой стороны прямоугольника, причем инверсный выход также
обозначают кружком. Примеры условного обозначения триггера приведены на рис. 8.2, а—ж.
Следует обратить внимание на то, что хотя входы двухступенчатого триггера часто показываются
не как динамические, его переключение осуществляется в момент перепада сигнала на входах. Это
следует из принципа действия триггера этого типа. Поэтому двухступенчатый триггер иногда
показывают как одноступенчатый, имеющий динамические входы.
Рис. 8.3. Асинхронный RS-триггер.
3
Триггер RS-типа (рис. 8.3, а) представляет собой устройство, имеющее два информационных
входа: R и S. В нем возможны два устойчивых состояния.
При R = 0 и S=1 триггер принимает состояние 1 (Q=1), а при R=l, S=0 — состояние 0 (Q = 0).
Иногда вход S называют единичным, a R — нулевым. Для триггера RS-типа. комбинация S=1;
R=l является запрещенной, так как после такой комбинации состояние триггера будет
неопределенным (X) и он может оказаться или в нуле, или в единице. Поэтому необходимо
предусматривать исключение этой комбинации. Состояния RC-триггера в зависимости от
входных сигналов иллюстрирует табл. 8.1.
Табл. 8.1.
Как видно из рис. 8.3, а, б, соединения логических элементов таковы, что если на выходе
одного из них установится потенциал, соответствующий коду 0, то на выходе другого будет
потенциал логической единицы.
В схеме, показанной на рис. 8.3,6, триггер устанавливается в состояние 1 сигналом S = 0, а в
состояние О (Q = 0) — сигналом R = 0. Запрещенной является комбинация S=R = 0. Установка
данного триггера по S- и R-входам производится сигналами, уровень которых соответствует
логическому нулю. Такой RS-триггер можно назвать триггером с инверсным управлением.
Нетрудно убедиться, что_ при любом начальном состоянии триггера Qn подача на вход S кода 0
приводит к появлению 1 на выходе (Q=1), а подача потенциала логического нуля на вход R
вызывает появление на выходе сигнала Q = 0. Для примера рассмотрим ход рассуждений в этом
случае. Пусть на входы S и R подана логическая 1. В этом случае в зависимости от предыдущих
сигналов возможны два состояния выхода: Qn = 0; Qn = 1 и Qn=1; Qn = 0. Напряжения кодов на
входах и выходах логических элементов, верхний из которых обозначим а, а нижний — б, можно
охарактеризовать с помощью табл. 8.2.
Табл. 8.2.
Из таблицы видно, что, в каком бы исходном состоянии ни был триггер в момент времени t„,
подача кода 0 на вход S в момент времени tn + l переводит триггер в положение 1. Аналогично,
подача на вход R нуля в момент tn + 1 обеспечивает установку триггера в положение 0. В
триггерах, показанных на рис. 8.3,6, в, установка в определенное их состояние осуществляется
кодом логической 1 (положительная логика).
Для нормальной работы триггера необходимо, чтобы длительность сигналов, действующих на
его входах, была больше задержки переключения обоих плеч триггера.
Асинхронные RS -триггеры находят ограниченное применение в качестве самостоятельных
устройств. Однако они часто входят составной частью в схемы более сложных триггеров. В ряде
случаев RS -триггеры выпускают в виде самостоятельных микросхем. Так, например, в корпусе
ИС типа 564ТР2 имеется четыре RS -триггера, имеющие свои информационные выходы Q1 — Q4
(1,2,9,10 рис. 8.3,в). Кроме того, имеется один вход Е разрешения приема информации. Если на
4
нем имеется логическая 1, то все триггеры работают независимо друг от друга. При логическом 0
на входе Е никакие сигналы на остальных входах триггеров не могут изменить их состояния.
Рис. 8.4. Синхронизируемый RS-триггер.
Синхронизируемые (тактируемые) RS -триггеры имеют на входе каждого плеча схемы
совпадения, первые входы которых объединены и являются входами синхронизирующих
(тактирующих) импульсов. На вторые входы подают информационные сигналы. Такое включение
обеспечивает поступление на входы R и S триггера информационных сигналов только во время
действия потенциала импульсов синхронизации. Некоторые варианты синхронизируемых RS триггеров показаны на рис. 8.4, а, б.
Для примера рассмотрим работу триггера (рис. 8.4, а). Пусть триггер находится в положении Q
= 1. На вход R подан сигнал логической 1. В этом случае при подаче тактирующего импульса на
вход С верхняя схема И-НЕ сформирует на своем выходе сигнал нуля. Он вызовет появление
выходного сигнала Q равного единице, как и в асинхронном RS -триггере.
Этот сигнал подается на второй вход нижней схемы И самого триггера и фиксирует, таким
образом, ее состояние. Следовательно, по окончании тактового импульса, хотя левая верхняя
схема совпадений и закроется, состояние триггера не изменится.
Аналогично, при комбинации S=1 и С=1 триггер установится в состояние Q=1. Комбинация R
= S=C=1 является запрещенной, так как ведет к неопределенности, как и в асинхронном триггере.
Иногда используют двухтактные RS -триггеры, у которых первый импульс обеспечивает запись
информации по входу S, а второй — по входу R. Возможны варианты с одним тактируемым и
одним асинхронным входами.
Условное графическое обозначение синхронного триггера приведено на рис. 8.4, в.
Триггеры D-типа иногда называют триггерами з а д е р ж к и . У них имеется один
информационный вход D и возможны два устойчивых состояния.
Логическое уравнение, описывающее работы D -триггера, имеет вид
Рис. 8.5. D-триггер (асинхронный)
Оно показывает, что состояние D -триггера в момент времени tn + 1 совпадает с кодом входного
сигнала, действующего в момент времени tn.
Роль простейшего асинхронного D -триггера может выполнять схема, состоящая из двух или
нескольких последовательно включенных логических элементов (рис. 8.5,а), в которой входной
сигнал из-за задержки распространения в каждом логическом элементе сдвинут во времени
относительно входного сигнала.
В состав D -триггеров, применяемых на практике, обычно входят RS -триггеры, управление
которыми организовано соответствующим образом. Возможная структура такого D -триггера
5
показана на рис. 8.5,6. В нем вследствие задержки распространения в логических элементах
сигнал на выходе Q появляется также с определенной задержкой времени.
Действительно, если на вход D был подан сигнал 1, то на выходе триггера Q = 1. При подаче на
вход D кода 0 на входе S RS -триггера, входящего в D -триггер, появится код 0, а на входе R из-за
задержки распространения в логическом элементе останется код 0. Состояние триггера не
изменится. Через промежуток времени, равный t3др , на входе R появится код 1, который изменит
состояние выхода Q на 0, а инверсного выхода —на 1. Другими словами, выходной сигнал
повторит входной сигнал с задержкой tздр (рис. 8.5,в,г). Если теперь сигнал входа D примет
значение 1. то на выходе Q должен появиться сигнал 0. Но так как на входе R на время tздр
останется код 1, состояние триггера измениться не успеет. Через промежуток времени tздр на выходе
R появится 0, а на выходе Q установится код 1. Сигнал на выходе триггера опять повторит входной
сигнал с задержкой tздр. Данный D -триггер работоспособен в том случае, когда задержка в
элементах RS -триггера больше времени задержки дополнительо введенного элемента ИЛИ-НЕ,
так что информация не теряется при возникающих неопределенных состояниях. Состояние
триггера в различные моменты времени можно определить из табл. 8.3.
Варианты практической реализации синхронизируемых однотактных триггеров D-типа,
выполненные на элементах И-НЕ или ИЛИ-НЕ, показаны на рис. 8.6, причем схема рис. 8.6, а
тактируется сигналами логической 1, а схема рис. 8.6,6—сигналами логического 0. На рис. 8.6, в
показано условное обозначение синхронизируемого D -триггера.
Табл. 8.3.
В отсутствие сигнала на входе С логические элементы DD1 и DD2 закрыты (они выполняют
роль вентилей). Информационный сигнал на входе D не меняет состояние триггера. Если подается
тактовый импульс С—1 и при этом D=1 (рис. 8.6,а), то на выходе DD1 формируется потенциал
логического 0. Этот сигнал, поступая на вход элемента, устанавливает триггер в состояние Q=1 и
одновременно блокирует включение DD2. При D = 0 и C=l DD1 останется закрытым, а на выходе
его будет логическая 1. На выходе DD2, который в этом случае открыт, появится сигнал
логического нуля и триггер установится в положение Q = 0.
Таким образом, в триггере записывается та информация, которая была на входе D до прихода
импульса синхронизации. Для четкой работы триггера (без сбоев) необходимо, чтобы к приходу
следующего импульса синхронизации потенциалы выходов логических элементов приняли
значения, исключающие ложные срабатывания. Поэтому минимальный интервал между
импульсами синхронизации у триггеров с подобной структурой tmin = 4tздрср, а максимальная
частота включения fmax= l/tmin == 0,25tздрср, где tЗДРСР — среднее время задержки распространения
сигнала одним ЛЭ.
Рис. 8.6. Реализация синхронных D-триггеров
6
Структура триггера не меняется, если в нем логические элементы И-НЕ будут заменены на
ИЛИ-НЕ. При этом могут меняться местами выходы, а прямые входы могут меняться на
инверсные.
При динамической синхронизации запись информации в D-триггер осуществляется в момент
действия фронта или среза импульса синхронизации (при перепаде напряжения входа С 0,1 или
1,0).
У ряда D-триггеров также имеется дополнительный вход Е (V) разрешения приема
информации (DV-триггеры). При V= 1 такие триггеры функционируют как обычные D-триггеры, а
при V=0 сохраняют исходное состояние независимо от информации на входе D. Реализовать такой
триггер можно путем введения в D-триггер дополнительного элемента И, включенного так, как
показано на рис. 8.6, г. Наличие дополнительного входа Е позволяет расширить функциональные
возможности триггера и сохранять записанную информацию при непрерывном изменении
сигналов на входах D и С. Запись информации возможна только в том случае, если на входе V
будет логическая 1.
Промышленностью выпускаются микросхемы синхронизируемых D-триггеров с разными
функциональными возможностями. Так, в ИС типа 155ТМ7 (рис. 8.7, а) в одном корпусе имеется
четыре синхронизируемых D-триггера, причем каждая пара триггеров может синхронизироваться
своим потенциалом входа синхронизации. У ИС типа 564ТМ2 (рис. 8.7, б) в одном корпусе
имеется два триггера. Использована динамическая синхронизация перепадом сигнала 0,1. Каждый
триггер имеет входы независимой установки в состояние 0 (R1 и R2) и состояние 1 (S1 и S2). ИС
типа 155ТМ8 (рис. 8.7, в) содержит четыре D-триггера с динамической синхронизацией фронтом
0,1 и инверсным входом R установки в нулевое состояние.
Рис. 8.7. Интегральные микросхемы D-триггеров.
Триггер T-типа — это логическая схема с двумя устойчивыми состояниями и одним
информационным входом Т, изменяющая свое состояние на противоположное всякий раз, когда на
вход Т поступает управляющий сигнал. Его часто называют триггером со счетным входом.
Основным способом построения счетных триггеров является введение соответствующих обратных
связей в тактируемые RS-и D)-триггеры.
Рассмотрим реализацию Т-триггера на основе схемы D-триггера с_ динамической
синхронизацией. Для этого инверсный выход Q соединим с входом D, а информационный сигнал
подадим на вход С (рис. 8.8, а). Пусть исходное состояние триггера будет таким, что сигнал на
выходе Q = 0, а на выходе Q = 1. Следовательно, и сигнал на выходе D равен логической единице.
При первом же перепаде напряжений 0,1 на входе синхронизации С триггер примет единичное
состояние (Q=1), так как на его входе будет потенциал логической 1. При этом потенциалы на
выходе Q и на входе D соответствуют логическому нулю.
Так как переключение триггера происходит в течение очень короткого времени, то изменение
сигнала на входе D, происходящее с небольшой задержкой относительно момента срабатывания
триггера, не может изменить его состояния. Таким образом, первый импульс синхронизации
установит триггер в состояние 1. На его входе D будет потенциал логического 0. Поэтому
следующий перепад напряжения 0,1 на входе С установит триггер в состояние 0. Потенциал на
входе D станет равным логической 1. Таким образом, состояние триггера меняется на
противоположное при каждом перепаде импульса напряжения на входе синхронизации и триггер
как бы считает проходящие импульсы.
7
Подобный D-триггер нормально функционирует в том случае, если сигнал на входе D не
успевает измениться за время переключения триггера. В противном случае начнется «состязание»
или «гонки». В результате их триггер может переключиться два раза или более вследствие
быстрого изменения сигнала на входе D, которое он успевает отработать. Для исключения этого
выход соединяют с входом D через линию задержки, в качестве которой можно использовать один
или два логических элемента (рис. 8.8, б). Их задержка распространения сигнала обычно бывает
достаточной для четкой работы T-триггеров, выполненных на микросхемах любых типов.
Рис. 8.8. Т-триггер
Рис. 8.9. Универсальный JK-триггер.
У T-триггеров также может иметься дополнительный вход Е (V) разрешения приема
информации. Действие его аналогично действию .Е-входа RS- и D-триггеров. Промышленность не
выпускает самостоятельных ИС T-триггеров. Их обычно получают путем соответствующих
включений D- и RS-триггеров.
Триггер JK-типа часто называют у н и в е р с а л ь ным. Это устройства, имеющие входы J и К, у
которых нет неопределенного состояния. Если на входы J и К подаются сигналы логической
единицы, то состояние JK-триггера меняется на противоположное при каждом новом приходящем
импульсе. Другими словами, если входы J и К объединены между собой, то JК-триггер работает
как T-триггер. В остальных случаях он функционирует как триггер RS-типа. При этом вход J
эквивалентен входу S, а К—входу R. На рис. 8.9, а показана структурная схема простейшего JKтриггера. При одновременной подаче на входы J и К сигнала логической единицы триггер с
помощью соответствующих схем совпадений устанавливается в положение 1 или 0 в зависимости
от его начального состояния (т. е. ведет себя как триггер T-типа). Если сигнал подается на вход J
или К, то триггер, аналогично RS-триггеру, устанавливается соответственно в состояние 1 или 0.
Линии задержки необходимы для устранения «состязаний» сигналов. Так, если при объединенных
входах J и К за время действия входного сигнала произойдет изменение потенциала на входе
одного из входных ЛЭ, то триггер переключится дополнительно. Для устранения подобных сбоев
длительность входного сигнала должна быть меньше времени задержки распространения сбоев,
вносимых линией задержки DL.
Триггер JK-типа универсальным называют потому, что на его основе с помощью несложных
коммутационных изменений можно получить RS- и T-триггеры (рис. 8.9, б, в, г).
В интегральной схемотехнике JK-триггеры обычно выполняются синхронными и
двухступенчатыми. В них имеется основной триггер (первая ступень), в который записывается
проходящая информация, и вспомогательный (вторая ступень), в который переписывается
информация из основного триггера.
Построение двухступенчатого триггера разберем на примере схемы рис. 8.10, а. Он состоит из
основного триггера на логических элементах DD3, DD4 с вентилями DD1 и DD2 и
дополнительного триггера на логических элементах DD7, DD8 с вентилями DD5 и DD6.
Дополнительный триггер также является тактируемым, причем в отличие от основного он
синхронизируется потенциалом логического 0. Для этой цели в схему введен инвертор DD9 на
логическом элементе ИЛИ-НЕ.
Рассмотрим работу триггера при разных комбинациях входного сигнала. Пусть в исходном
положении триггер находится в нулевом состоянии (Q = 0). Тогда на одном из входов вентилей
DD1 и DD2 будут соответственно логическая 1 (Q = 1) и логический 0 (Q = 0). При отсутствии
тактового импульса на выходе С вентили DD1 и DD2 закрыты независимо от того, какие сигналы
на остальных входах DD1 и DD2.
8
Рис. 8.10. Двухступенчатый синхронный JK-триггер.
Пусть на вход J подан сигнал логической 1. Тогда с приходом импульса синхронизации С
вентиль DD1 откроется, а вентиль DD2 останется закрытым. Одновременно закроются оба вентиля
DD5 и DD6 сигналом логического 0, снимаемого с выхода инвертора DD9. Сигнал логического
нуля, снимаемого с открытого вентиля DD1, записывает в основной триггер информацию,
устанавливая его в состояние 1. Тогда на одном из входов вентиля DD5 будет сигнал логической
1, а на входе вентиля DD6 — сигнал логического 0. Однако эти сигналы никак не меняют
состояние вспомогательного триггера, так как эти вентили во время действия импульса
синхронизации С=1 закрыты. По его окончании на вторых входах вентилей DD5 и DD6 появится
логическая 1, а вентили DD1 и DD2 закроются. Так как основной триггер находится в положении
1, то откроется вентиль DD5 и информация запишется во вспомогательный триггер, который
установится в положении 1 (Q = 1).
Совершенно аналогично сигнал, поданный на вход К (K=1), установит триггер в состояние
логического нуля: Q = 0.
Таким образом, в триггере данного типа изменение выходного сигнала происходит только в
моменты, когда потенциал С переходит из 1 в 0. Поэтому говорят, что эти триггеры тактируются
фронтом или срезом в отличие от триггеров, тактируемых потенциалом.
Если соединить вместе входы J и K, то триггер станет счетным и превратится в триггер T-типа.
Действительно, если триггер находится в положении 1 (Q=1), то при одновременной подаче
K=J=1 и С= 1 вентиль DD1 будет закрыт сигналом 0 (Q = 0), снимаемого с выхода триггера. Так
как открывается только вентиль DD2, триггер установится в нулевое состояние Q = 0. При этом
выходной потенциал Q = 0 блокирует вентиль DD2. Поэтому следующая комбинация J=K=C=1
переводит триггер в состояние Q=1 и т. д. Если входы J, К, С объединить между собой, то
синхронный JK-триггер будет работать как синхронный T-триггер. Тот же результат получается в
случае, если на входы J и К подать логическую 1, а счетные импульсы — на вход С.
Двухступенчатый триггер ведет себя подобно триггеру с инверсной динамической
синхронизацией, хотя и основной, и вспомогательный триггеры имеют статическое управление.
Рис. 8.11. Интегральный JK-триггер К155ТВ1.
Промышленностью выпускаются JK-триггеры, имеющие разные функциональные
возможности. Так, в ИС типа 155ТВ1 (рис. 8.11, а) на входах J и К установлены трехвходовые
логические элементы И и имеются входы раздельной установки в состояние 0 (R) и состояние 1
(S). Использование этой микросхемы в качестве T-триггера показано на рис. 8.11, б, а
синхронизируемого RS-триггера — на рис. 8.11, в. Наличие логического элемента И на входах J и
К расширяет функциональные возможности микросхемы. Так, при введении дополнительных
логических элементов и использовании логики, имеющейся во входных цепях триггеров, удается
9
реализовать устройства с видоизмененными уравнениями функционирования. В ряде случаев они
имеют свои названия, например триггеры типа S (при S = R=1 устанавливаются в единичное
состояние), типа R (при S = R=1 устанавливаются в нулевое состояние), типа Е (при S=R=1 не
меняют своего состояния).
Переходные процессы в триггерах, выполненных на основе интегральных логических
элементов, протекают достаточно быстро.
При ориентировочной оценке можно считать, что для каждой пары логических элементов,
соединенных так, что образуется петля положительной ОС, длительность фронта и среза равна
времени задержки распространения сигнала в этих логических элементах.
Из рассмотренного следует, что триггеры осуществляют запоминание информации и остаются
в заданном состоянии после прекращения действия переключающих сигналов. Поэтому они
относятся к классу устройств, которые носят название конечных а в т о м а т о в — устройств,
имеющих память об их предыдущем состоянии.
Триггеры широко используют при цифровой обработке информации в устройствах
измерительной техники, автоматики и вычислительной техники.
Остановимся на работе D-триггера чуть подробнее, так как он наиболее часто используется.
При этом многие замечания, высказываемые здесь относительно D-триггера, будут верны и для
других типов триггеров.
Прежде всего отметим, что все приведенные временные диаграммы относятся к первому
уровню представления, к уровню логической модели. Конечно же, в реальности все триггеры
имеют временные задержки установки выходных сигналов, а также предъявляют определенные
временные требования к входным сигналам, при нарушении которых любой триггер будет
работать неустойчиво или же не будет работать вообще. Это учитывается на втором уровне
представления (в модели с временными задержками).
Например, как уже отмечалось, входные сигналы R и S не должны приходить одновременно,
иначе состояние триггера будет неопределенным. Длительность сигналов R и S также не должна
быть слишком малой, иначе триггер может на них не среагировать. Сигнал R должен начинаться с
определенной задержкой после окончания сигнала S и наоборот. В первом приближении можно
считать, что минимально допустимые временные интервалы между входными сигналами должны
равняться 1—2 задержкам логического элемента соответствующей серии.
Точно так же не должна быть слишком малой длительность тактового сигнала С (как
положительного импульса, так и отрицательного импульса), иначе триггер может переключаться
неустойчиво. Это требование универсально для всех микросхем, срабатывающих по фронту
входного сигнала. Принципиально важна и величина временного сдвига (задержки) между установлением сигнала D и рабочим (положительным) фронтом сигнала С. Этот сдвиг также не
должен быть слишком малым. Не должен быть чрезмерно малым и сдвиг между окончанием
сигналов R и S и рабочим фронтом сигнала С. Повышенные требования предъявляются также к
длительности фронта тактового сигнала С, которая не должна быть слишком большой. Это
требование также универсально для всех микросхем, срабатывающих по фронту входного сигнала.
Одним словом, чем сложнее микросхема, тем важнее для нее становятся ограничения второго
уровня представления, тем выше требования к разработчику по учету временных задержек и
длительностей сигналов. Правда, требования эти не слишком разнообразны и не слишком жестки,
поэтому, раз и навсегда усвоив их, можно проектировать любые схемы без грубых ошибок. Самое
главное, что надо запомнить, состоит в следующем: цифровые схемы не любят слишком коротких
входных сигналов и слишком малых задержек между входными сигналами, функционально
связанными между собой. Ориентир здесь очень простой — величина задержки логического
элемента данной серии. Поэтому для более быстрых серий ограничения будут менее жесткими, а
для более медленных серий — более жесткими.
Несколько слов о величинах задержек микросхем триггеров.
Несмотря на свою достаточно сложную внутреннюю структуру микросхемы триггеров
являются одними из самых быстрых. Задержка срабатывания триггера обычно не превышает 1,5-2
задержек логического элемента. Причем задержки по входам R и S чуть меньше, чем по тактовому
входу С. В некоторых сериях JK-триггеры несколько быстрее, чем D-триггеры, в других —
10
наоборот. Важный параметр триггера — максимальная частота тактового сигнала С. Для ее
приблизительной оценки можно придерживаться следующего простого правила: период тактового
сигнала С не должен быть меньше величины задержки переключения триггера по входу С.
НЕСИММЕТРИЧНЫЕ ТРИГГЕРЫ
Несимметричные триггеры часто называют т р и г г е р а м и Шмитта. По своим свойствам они
существенно отличаются от симметричных триггеров, так как у них нет памяти о предыдущем
состоянии. Несимметричный т р и г г е р — это регенеративное устройство, имеющее
гистерезисную передаточную характеристику, у которой выходной сигнал может принимать два
значения. Переход от одного уровня выходного напряжения к другому происходит скачкообразно
при определенном значении входного сигнала — напряжении срабатывания. Возвращение в
исходное состояние происходит при другом уровне входного сигнала — напряжении отпускания.
По модулю оно всегда меньше напряжения срабатывания на величину U, характеризующую
ширину петли гистерезиса.
Рис. 8.12. Триггер Шмитта.
Подобные регенеративные устройства обычно используются для формирования резких
перепадов напряжения из сравнительно медленно меняющихся входных сигналов.
Рассмотрим работу триггера Шмитта (рис. 8.12, а). Пусть транзистор VT2 открыт и насыщен, а
транзистор VT1 закрыт. В режиме насыщения падение напряжения на транзисторе VT2 близко к
нулю. Это позволяет показать его в виде точки («стянуть» в точку) на эквивалентной схеме рис.
8.11, б. Такой прием широко применяется при анализе устройств с насыщенными ключами.
Через транзистор VT2 (рис. 8.12, б) протекает ток, создающий на резисторе R3 падение
напряжения. Параметры резисторов R3, R4, Rэ выбраны так, что напряжение UБЭ транзистора VT1
меньше порогового и он находится в области глубокой или неглубокой отсечки. Для
определенности будем считать, что падение напряжения на резисторе Rэ таково, что транзистор
VT1 находится в области глубокой отсечки и ток его базы IБ01 равен IБО1 = -IКБО1 (рис. 8.12, б).
При подаче входного напряжения UBX транзистор VT1 откроется в тот момент, когда
напряжение UБЭ транзистора VT1 станет равным пороговому. Отпирание транзистора VT1
приводит к увеличению тока через резистор RK1 и повышению падения напряжения на нем.
Соответственно потенциалы коллектора транзистора VT1 и базы транзистора VT2 понижаются.
Это приводит к уменьшению тока базы транзистора VT2 и выходу его из состояния насыщения в
активную область. Возникает регенерация. Уменьшение тока транзистора VT2 приводит к
снижению падения напряжения на резисторе Rэ. При этом повышается напряжение UБЭ1 и
уменьшаются потенциал его коллектора, токи базы и коллектора транзистора VT2 и
дополнительно снижается падение напряжения на резисторе Rэ. Последнее приводит к
11
дальнейшему увеличению тока базы транзистора VT1 и снижению потенциала его коллектора.
Процесс идет лавинообразно. В результате его транзистор VT2 попадает в область отсечки, а
транзистор VT1 насыщается или находится на границе области насыщения. Напряжение, при
котором происходит переброс триггера, называется н а п р я жением с р а б а т ы в а н и я Uсрб (рис.
8.12, в). Дальнейшее увеличение входного напряжения увеличивает только глубину насыщения
транзистора VT1, так как ток Iк1 уменьшается из-за увеличения тока IЭ1 и соответствующего
увеличения падения напряжения на сопротивлении Rэ.
Если теперь уменьшать входное напряжение, то обратное опрокидывание триггера происходит
не в точке Uср6, а при несколько меньшем напряжении Uотп. Напряжение, при котором происходит
возврат триггера в исходное состояние, называется напряжением о т п у с к а н и я Uотп.
Параметры элементов схемы выбирают так, чтобы ток транзистора VT2, находящегося в
режиме насыщения IКнас2 E/(RК2 + Rэ)]. был больше тока насыщения транзистора VT1
[IКнас1E/(Rк1+Rэ)].
Соответственно падение напряжения Uэ на резисторе Rэ при насыщенном транзисторе VT2
больше, чем при открытом транзисторе VT1. Этим и обусловлено то, что модуль напряжения |Uотп|
всегда меньше |Uсрб|. Действительно, при напряжении Uср6 из-за меньшего падения напряжения на
резисторе Rэ напряжение (UБЭ транзистора VT1 таково, что он находится в области насыщения.
Потенциал базы транзистора VT2 составляет часть потенциала коллектора транзистора VT1.
Следовательно, транзистор VT2 находится в области глубокой отсечки. Он может открыться
только после того, как транзистор VT1 выйдет из насыщения и коллекторный ток Iк1 достаточно
уменьшится. Только тогда потенциал UK1, пониженный делителем R1, R2, станет равным
пороговому напряжению, что требуется для отпирания транзистора VT2.
В соответствии со сказанным передаточная пусковая характеристика триггера Шмита имеет
вид, показанный на рис. 8.12, в. Она соответствует режиму идеального источника напряжения на
входе триггера (Rи = 0).
При реальном источнике входного сигнала напряжения отпирания и закрывания оказываются
больше соответствующих величин Uср6 и U0Tn, а при достаточно большом сопротивлении источника
триггер вообще может перестать переключаться. Это обусловлено тем, что высокоомный
источник приближается к генератору тока. Тогда ток во входной цепи мало зависит от падения
напряжения на резисторе Rэ. Следовательно, регенерация будет отсутствовать и триггер потеряет
свои основные свойства.
Рис. 8.13. Исполнение триггера Шмита на интегральных микросхемах.
Таким образом, различие в уровнях срабатывания и отпускания является необходимым
условием работы цепи в триггерном режиме.
Следует обратить внимание на некоторую возможную нестабильность уровней срабатывания и
отпускания. Их разброс и дрейф обусловлены разбросом параметров и старением элементов цепи,
а также влиянием внешних условий, особенно температуры. Эти возможные нестабильности
уровней необходимо учитывать при использовании триггеров Шмитта на транзисторах в качестве
различных сравнивающих устройств.
Триггеры Шмитта выпускаются в виде самостоятельных микросхем в составе отдельных
серий, например типа К155ТЛ1, К155ТЛ2, К155ТЛЗ, 564ТЛ1 и др. В их входную цепь часто
включен логический элемент И, расширяющий функциональные возможности интегральной
схемы. Так, в микросхеме 564ТЛ1 (рис. 8.13, а) в одном корпусе выполнены четыре триггера
12
Шмита. На входе триггеров установлен двухвходовой элемент И, а на каждом выходе — инвертор
сигнала, уменьшающий влияние сопротивления нагрузки на значение и форму выходного сигнала.
Напряжение срабатывания у триггеров на биполярных транзисторах (серии 155, 133) около 1,5 В.
Напряжение отпускания около 1 В. У триггеров серий КМОП (564, 176) напряжения срабатывания
и отпускания зависят от напряжения источника питания. Так, у 564ТЛ1 Ucp6 равны 2,9, 5,2,
7,3 В при напряжениях питания 5, 10 и 15 В. Соответственно напряжения отпускания равны 0,7,
1,0, 1,3 В.
Интегральные триггеры Шмитта устанавливают перед логическими элементами в тех случаях,
когда им приходится работать с входными сигналами, имеющими значительную длительность
фронтов. В этих случаях триггеры Шмитта повышают крутизну нарастания сигналов,
«предохраняют» ЛЭ от длительного нахождения в активном режиме, в котором те могут
самовозбудиться, и подвергаются повышенному действию помех.
При необходимости получить повышенную стабильность напряжений срабатывания и
отпускания триггеры Шмитта выполняют на операционных усилителях, например так, как
показано на рис. 8.13, б. Уровень входного сигнала его срабатывания определяется значением
напряжения Е0. Его можно легко регулировать в широких пределах.
Рассматриваемый триггер Шмитта представляет собой ОУ, охваченный положительной ОС с
помощью резисторов R2, R3. Коэффициент ОС = R2/(R2 + R3).
Из теории обратной связи известно, что усилитель, охваченный положительной ОС, переходит
в автогенераторный режим или становится регенеративным устройством при выполнении условия
К1. Следовательно, если R2/(R2 + R3)>1/K, то данное устройство будет обладать
регенеративными свойствами и выходная характеристика будет релейной.
Пусть на инвертирующий вход подано входное напряжение, существенно меньшее Е0. Тогда
ОУ находится в состоянии, в котором Uвых = U+вых max . Значение этого напряжения определяется
типом ОУ и напряжениями питания
Если пренебречь влиянием синфазного сигнала, то можно считать, что выходной сигнал ОУ
начнет изменяться в том случае, если между его входами будет разность напряжений, меньшая
где Куи — коэффициент усиления ОУ.
Таким образом, если входное напряжение UBX будет меняться, то в тот момент, когда разность
напряжений между входами станет меньше U1; напряжение на выходе ОУ изменится. ОУ выйдет
из состояния насыщения и вследствие действия цепи положительной ОС начнет регенеративный
процесс. Так как на неинвертирующем входе напряжение равно Uн 1, то регенерация начнется в
момент времени, когда
В результате процесса регенерации ОУ окажется снова в состоянии насыщения, но выходное
напряжение будет уже противоположного знака и равно U-выхтах. Процесс регенерации протекает
следующим образом: как только входное напряжение стало равным Uвх1 усилитель выходит из
насыщения. Выходное напряжение начинает уменьшаться, снижая напряжение на
неинвертирующем входе. Это приводит к уменьшению разности потенциалов между входами и
дальнейшему снижению выходного напряжения. После того как выходное напряжение перейдет
нулевое значение, разность потенциалов между входами начнет возрастать по модулю, но
полярность меняется на противоположную. Процесс протекает лавинообразно, и в итоге
усилитель «попадает» в насыщение по другой полярности. На входе ОУ, который не инвертирует
входной сигнал, установится напряжение
13
Это состояние будет устойчивым при всех значениях входного напряжения, больших UBX 1.
Если теперь уменьшить входное напряжение, то выходное напряжение не изменит своего
значения до момента, пока ОУ не выйдет из насыщения, что имеет место при дифференциальном
сигнале ОУ:
Процесс регенерации, обусловленный выходом ОУ в активную область, начнется при
Отсюда получим
Разные входные напряжения, при которых формирователь срабатывает, говорит о наличии
гистерезиса, аналогичного гистерезису у триггера Шмитта. Ширина петли гистерезиса
определится разностью входных напряжений Uвх1 и Uвх 2.
Как видно из выражения (8.23), ширина петли гистерезиса зависит от напряжений U+выхмах и
U-выхмах а также от коэффициента обратной связи. Если =1/К, то гистерезис отсутствует совсем,
так как выражение, стоящее во вторых скобках, обращается в нуль. Если >1/К, то последнее
выражение можно упростить и записать в виде
Таким образом, передаточная характеристика формирователя имеет вид, показанный на рис.
8.12, в.
Напряжение Е0 смещает середину петли гистерезиса, практически не меняя ее ширины,
зависящей от коэффициента обратной связи у и уровней ограничения ОУ. Следует обратить
внимание на то, что при очень малом у коэффициент усиления ОУ влияет на ширину петли
гистерезиса.
Нестабильность напряжений U+выхмах и U-выхмах приводит к изменению ширины петли
гистерезиса и изменениям уровней срабатывания и отпускания. Этого недостатка лишен
формирователь, схема которого показана на рис. 8.13, д. В нем напряжение ОС стабилизировано
по обеим полярностям с помощью стабилитронов VD1 и VD2. При этом все полученные выше
уравнения остаются справедливыми, только в них вместо U+выхмах и U-выхmах необходимо
подставить напряжение стабилизации соответствующего стабилитрона, добавляя к нему падение
уравнения на стабилитроне, который при данной полярности выходного напряжения выполняет
функции открытого диода.
Возможны и другие схемы выполнения формирователей с характеристиками типа триггера
Шмита, например такие, как показано на рис. 8.13, д.
У формирователя (рис. 8.13, д) в цепь обратной связи включен диод VD. Введение его
приводит к тому, что один уровень срабатывания для уменьшающегося UВх приблизительно равен
Е0. Другой уровень, для увеличивающегося UBX, определяется из выражения
Если значения входного напряжения меньше второго уровня срабатывания, то цепь работает
как «защелка». Действительно, стоит только раз входному напряжению уменьшиться до значения
ниже Е0, как формирователь сработает и останется в этом положении до тех пор, пока не будет
подан входной сигнал, больший второго уровня срабатывания формирователя.
14
ПРАКТИЧЕСКОЕ ИСПОЛЬЗОВАНИЕ ТРИГГЕРОВ
Говоря об областях применения триггеров, мы будем рассматривать исключительно Dтриггеры, так как в большинстве случаев RS- и Ж-триггеры могут быть заменены D-триггерами
без ухудшения каких бы то ни было параметров схемы. Примеры такой замены показаны на рис.
8.14.
RS-триггер получается из D-триггера, если в D-триггере не использовать входы С и D,
например, соединить их с общим проводом (а).
Рис. 8.14. Включение D-триггера для замены RS-триггера (а) и JK-триггера в счетном режиме
(б).
Сложнее обстоит дело с заменой JK-триггера, в котором предусмотрено больше возможностей,
чем в D-триггере. Однако обычно два информационных входа JK-триггера не так уж и нужны. А
что касается счетного режима, в котором, пожалуй, наиболее часто работают JK-триггеры, то он
легко реализуется на D-триггере в результате объединения информационного входа D с
инверсным выходом (6). При этом по каждому положительному фронту сигнала С триггер будет
менять свое состояние на противоположное: нуль на прямом выходе будет сменяться единицей и
наоборот. То есть частота входного сигнала триггера будет меньше частоты входного тактового
сигнала С в два раза.
Особенности триггеров обуславливают наиболее широкий диапазон схем их включения для
решения самых разных задач.
Например, с помощью триггера (любого типа) очень просто и эффективно решается задача
устранения влияния дребезга контактов механических переключателей (рис. 8.15). Правда в
данном случае необходим тумблер (или кнопка) с тремя выводами, один из которых попеременно
подключается к двум другим. При этом первый же отрицательный импульс на входе -R
перебрасывает триггер в состояние нуля, а первый же отрицательный импульс на входе -S — в
состояние единицы. Последующие же импульсы на обоих этих входах, вызванные дребезгом
контактов, уже никак не влияют на триггер. Нижнее (по рисунку) положение выключателя
соответствует нулю на выходе триггера, а верхнее — единице.
Рис. 8.15. Подавление дребезга контактов выключателя с помощью триггера.
Основное применение триггеры находят в тех случаях, когда надо сформировать сигнал,
длительность которого соответствует длительности какой-то выполняемой операции, какого-то
продолжительного процесса в схеме. Выходной сигнал триггера при этом может разрешать этот
самый процесс, а может информировать остальные узлы устройства о том, что процесс идет (или,
как говорят, служить флагом процесса). Например, в схеме на рис. 8.16 в начале процесса
(операции) по сигналу Старт триггер перебрасывается в единицу, а в конце процесса (операции)
по сигналу Стоп триггер перебрасывается обратно в нуль.
Рис.8.16. Использование триггера в качестве флага процесса.
Для сигналов Старт и Стоп можно, конечно, использовать входы триггера -R и -S. Однако
более правильным и универсальным решением будет выбор пары входов С и -R или С и -S, что
предотвратит неоднозначность поведения триггера при одновременном приходе сигналов Старт и
15
Стоп. Если используются входы С и -R, то на вход D надо подать единицу, а если применяются
входы С и -S, то на вход D надо подать нуль. Такое решение удобно еще и тем, что в качестве
одного из сигналов Старт и Стоп может выступать не уровень, а фронт. Именно этот фронт (в
нужной полярности) и надо подать в этом случае на тактовый вход триггера С.
Вторая важнейшая область применения триггеров — это синхронизация сигналов.
Например, триггер позволяет наиболее просто избавиться от паразитных коротких импульсов
на выходах комбинационных схем, возникающих при почти одновременном изменении
нескольких входных сигналов (рис. 8.17). Для синхронизации в данном случае необходимо иметь
синхросигнал (синхропереход), сопровождающий входные информационные сигналы (входной
код) и задержанный относительно момента изменения этих сигналов на время t3, большее задержки комбинационной схемы. При подаче этого синхроимпульса на вход С триггера, а выходного
сигнала комбинационной микросхемы (Вых.1) на вход D триггера на выходе триггера получаем
сигнал (Вых.2), полностью свободный от паразитных импульсов.
Рис. 8.17. Синхронизация с помощью триггера.
Более того, в случае, когда входной код комбинационной схемы изменяется регулярно,
периодически, фронт синхросигнала может даже совпадать с моментом изменения входного кода
(рис. 8.18).
Рис. 8.18. Синхронизация с помощью триггера при периодическом изменении входного кода.
При этом за счет конечной величины задержки комбинационной схемы сигнал на вход С
триггера будет поступать раньше, чем начнет изменяться сигнал на его входе D. Поэтому паразитные импульсы в триггер не запишутся. Правда, в данном случае сигнал на выходе триггера
(Вых.2) будет задержан на период следования входных кодов Т (или, что то же самое, на период
синхросигнала) относительно выходного сигнала комбинационной схемы (Вых.1).
При проектировании цифровых схем, работающих по тактам единого тактового генератора,
часто возникает необходимость синхронизовать с работой схемы какой-то внешний сигнал. То
есть требуется обеспечить, чтобы этот сигнал (асинхронный по отношению ко всей остальной
схеме) изменялся по тактам тактового генератора, как и все остальные сигналы схемы (стал бы
синхронным всей остальной схеме). В этом тоже может помочь триггер.
Рассмотрим самый простой пример. Пусть необходимо с помощью внешнего сигнала
разрешать и запрещать прохождение сигнала непрерывно работающего тактового генератора. В
случае обычного RC-генератора эта задача иногда может быть решена довольно просто путем
запуска и остановки генератора. Однако далеко не всегда допускается останавливать работу
тактового генератора, от которого работает вся схема. В случае же кварцевого генератора его
остановка и запуск вообще никогда не используются, так как такой генератор начинает работать
после разрешения с задержкой, равной нескольким периодам тактовой частоты, причем
количество этих периодов не постоянно. Поэтому будем считать, что тактовый генератор работает
постоянно, а по внешнему управляющему сигналу мы будем разрешать или запрещать
прохождение его выходных импульсов (рис. 8.19).
16
Рис. 8.19. Синхронизация сигнала разрешения.
В простейшем случае (а) для пропускания и запрещения импульсов тактового генератора Г
используется логический элемент 2И. При этом вполне возможна ситуация прохождения на выход
схемы импульсов неполной длительности или даже предельно коротких, нестабильно
появляющихся импульсов, которые могут вносить неопределенность в работу остальной схемы.
Применение синхронизирующего триггера (б) обеспечивает прохождение на выход
пропускающего элемента 2И только импульсов полной длительности. Разрешающий сигнал,
проходя через триггер, который тактируется разрешаемым сигналом, становится синхронным с
тактовым сигналом и гарантирует прохождение на выход обязательно целого количества тактовых
импульсов, целого количества периодов тактового генератора.
Триггеры позволяют также строить линии задержки цифровых сигналов, для чего несколько
триггеров соединяется в последовательную цепочку, причем все они тактируются единым
тактовым сигналом С. Такое включение позволяет, например, одновременно обрабатывать
комбинационными схемами несколько последовательных во времени состояний какого-то одного
сигнала.
В качестве примера на рис. 8.20 приведена схема, которая выделяет во входном сигнале
трехтактовую последовательность 010. Цепочка из трех триггеров Tl, T2 и ТЗ, тактируемых единым синхросигналом, запоминает три последовательных состояния входного сигнала. Например,
если на выходе триггера Т2 будет зафиксировано состояние входного сигнала в N-м такте, то на
выходе триггера Т1 будет состояние входного сигнала в такте (N+1), а на выходе триггера ТЗ — в
такте (N-1). Из-за конечной величины задержки переключения триггеров в каждый следующий
триггер входной сигнал будет переписываться еще до того, как он изменит свое значение
вследствие переключения предыдущего триггера.
Рис. 8.20. Выделение 3-тактовой последовательности тактов во входном сигнале.
Подавая выходные сигналы триггеров (прямые или инверсные в зависимости от нужных
уровней) на элемент И с нужным числом входов, можно зафиксировать любую трехтактовую последовательность во входном сигнале. Для предотвращения появления паразитных импульсов в
выходном сигнале (они возможны, так как входные сигналы элемента И изменяются почти
одновременно) применяется выходной триггер Т, тактируемый тем же самым общим
синхросигналом. На выходе триггера Т получаем единичный сигнал, соответствующий
17
последовательности 010 во входном сигнале. Правда, этот выходной сигнал будет задержан
относительно конца выделяемой последовательности 010 на два такта.
Конечно, применение триггеров не ограничивается рассмотренными примерами, все области
их применения трудно даже перечислить. Мы же рассмотрим здесь еще несколько примеров
использования триггеров.
Рис. 8.21. Формирователь короткого импульса по фронту входного сигнала.
D-триггер позволяет довольно просто формировать выходной короткий импульс по фронту
входного сигнала. Для этого даже не нужно никаких времязадающих RC-цепочек. Длительность
выходного импульса определяется задержкой срабатывания триггера. Формирователь короткого
импульса по положительному фронту входного сигнала (рис. 8.21) образуется путем подачи
выходного сигнала триггера на вход сброса.
По положительному фронту на входе С триггер перебрасывается в единицу, но выходной
сигнал триггера по цепи обратной связи тут же сбрасывает его обратно в нуль. Преимуществом
данной схемы является то, что триггер имеет как прямой, так и инверсный выходы, поэтому мы
получаем как положительный короткий импульс, так и отрицательный. В некоторых случаях в
цепь этой обратной связи надо включать дополнительный инвертор для устойчивой работы схемы.
Например, триггеры серии К155 не требуют инвертора, а триггеры серии КР1533— требуют.
Применение триггеров совместно с другими микросхемами часто позволяет избежать
появления паразитных коротких импульсов, обеспечить надежную и уверенную работу схемы. Например, на рис. 8.22 представлена схема, различающая короткие и длинные импульсы,
приходящие на ее вход. Такая схема позволяет применять одну линию связи для передачи двух
сигналов разного назначения, что бывает очень удобно при связи устройств, находящихся на
большом расстоянии.
Рис.8.22. Схема разделения коротких и длинных входных импульсов.
На вход схемы поступают короткие импульсы (длительностью tK) и длинные импульсы
(длительностью tд). Конечно, на передающем конце надо обеспечить, чтобы эти импульсы формировались по очереди и с не слишком малой задержкой друг относительно друга. На выходе
схемы формируются два сигнала, один из которых соответствует приходу короткого входного
импульса, а другой — приходу длинного входного импульса.
Для различения входных импульсов используется одновибратор АГ1 с временем выдержки tB,
большим tK, но меньшим tд. Применение одновибратора в данном случае оправдано, так как
требуемая точность времени выдержки невысока (считаем, что длительности импульсов
различаются существенно). Выходные сигналы схемы формируются с помощью двух триггеров, а
не простых двухвходовых логических элементов, что полностью исключает появление паразитных
импульсов на фронтах.
Принцип работы схемы ясен из приведенной временной диаграммы. Одновибратор запускается
по переднему фронту входного сигнала. Выходной сигнал Вых.1, соответствующий приходу
длинного импульса, начинается по заднему фронту импульса одновибратора, а заканчивается по
окончанию длинного входного импульса. Выходной сигнал Вых.2, соответствующий приходу
18
входного короткого импульса, начинается по заднему фронту входного импульса, а заканчивается
с окончанием импульса одновибратора.
Триггеры можно также использовать для обработки периодических последовательностей
входных сигналов. При этом триггер, тактируемый кварцевым генератором, может очень точно
различать частоты следования входных импульсов, то есть выполнять функцию простейшего
цифрового фильтра. Такие схемы выгодно отличаются от схем с одновибраторами и
времязадающими RC-цепочками возможностью полностью интегрального исполнения и
отсутствием какой бы то ни было настройки.
Простейший пример подобной обработки состоит в формировании огибающей входного
сигнала. То есть при приходе входного сигнала заданной частоты выходной сигнал должен быть
равен единице, а при отсутствии входного сигнала — нулю. Эта задача может быть решена с
помощью одновибратора с перезапуском (типа АГЗ). Однако применение триггеров значительно
увеличивает точность срабатывания и позволяет работать с частотами, близкими к предельным
для данного типа триггеров. Схема формирования огибающей состоит всего лишь из двух
триггеров, тактируемых внешним синхросигналом (рис. 8.23). В данном случае предполагается,
что частоты входного сигнала и тактового сигнала равны между собой.
Рис. 8.23. Формирователь сигнала огибающей входного сигнала на триггерах.
Триггеры включены как двухтактная линия задержки с общим тактовым сигналом С и со
сбросом входными сигналами. Самый первый входной импульс последовательности инициирует
начало действия выходного сигнала, то есть переключение выхода в состояние логической 1, а
заканчивается действие выходного сигнала, то есть возврат выхода в состояние логического 0,
через 1-2 периода тактового сигнала после окончания входной последовательности (в зависимости
от временного сдвига входного сигнала относительно тактового сигнала). Схема работает с
входным сигналом любой частоты, большей половины частоты тактового сигнала (например, при
тактовой частоте 10 МГц входной сигнал должен иметь частоту, большую 5 МГц). То есть за
половину периода входной частоты не должно приходить больше одного положительного фронта
тактового сигнала.
Этот же формирователь огибающей можно использовать в более сложных схемах. Примером
может служить фильтр, который позволяет разделить две частоты входного сигнала, пропустить
более высокочастотный сигнал и отсечь более низкочастотный (рис. 8.24).
Рис. 8.24. Фильтр для пропускания высокочастотных сигналов на триггерах.
Фильтр состоит из трех триггеров и элемента 2И, работающего в режиме пропускания
положительных входных импульсов. Два триггера (левые на схеме) образуют формирователь
огибающей. Третий (правый на схеме) триггер выдает сигнал пропускания в случае, когда сигнал
огибающей непрерывен, то есть когда частота входного сигнала составляет больше половины
19
тактовой частоты. Если в момент прихода положительного фронта входного сигнала сигнал
огибающей на выходе второго триггера нулевой, то пропускающий сигнал на выходе третьего
триггера также нулевой, и импульсы не проходят на выход. При этом первый входной импульс
пропускаемого сигнала на выход не проходит. Цепочка из двух инверторов компенсирует задержку срабатывания третьего триггера, она задерживает входной сигнал перед подачей его на
вход выходного пропускающего элемента 2И.
Таким образом, фильтр надежно пропускает входные сигналы с частотой, большей половины
тактовой частоты, и надежно задерживает сигналы с частотой, меньшей четверти тактовой
частоты. Например, при тактовой частоте 10 МГц фильтр будет пропускать сигналы с частотой
выше 5 МГц, и задерживать сигналы с частотой ниже 2,5 МГц. С частотами входного сигнала от
2,5 до 5 МГц работа фильтра не будет стабильной, она будет зависеть от временного сдвига между
входным сигналом и тактовым сигналом.
Наконец, последняя схема на триггерах, которую мы рассмотрим, предназначена для
кодирования входного сигнала в манчестерский код (или код Манчестер-П). Этот код широко
используется при передаче сигналов на большие расстояния, в частности в локальных сетях.
Суть манчестерского кодирования иллюстрируется рис. 8.25. Входной сигнал представляет
собой последовательность битов равной длительности. В каждом такте передается один бит ин
формации. Манчестерский код заменяет единичный информационный бит на отрицательный
переход в центре битового интервала, а нулевой информационный бит — на положительный
переход в центре битового интервала. Таким образом, в центре каждого битового интервала
сигнала в манчестерском коде обязательно имеется фронт (положительный или отрицательный),
который может быть использован приемником этого сигнала для синхронизации приема каждого
информационного бита. Поэтому манчестерский код называется самосинхронизирующимся
кодом.
Рис. 8.25. Манчестерское кодирование.
Рис. 8.26. Кодировщик манчестерского кода на триггерах.
Кодировщик (он же шифратор) манчестерского кода (рис. 8.26) включает в себя элемент
Исключающее ИЛИ, который, собственно, и производит кодирование, а также три триггера для
синхронизации. Один триггер (левый на схеме) работает в счетном режиме, деля частоту
тактового сигнала в два раза. Один триггер (центральный) синхронизирует входной
информационный сигнал с тактовым сигналом половинной частоты. Наконец, последний, третий
триггер (правый) синхронизирует выходной сигнал для устранения в нем паразитных коротких
импульсов в моменты изменения входного сигнала. Он фиксирует выходной сигнал элемента
Исключающее ИЛИ (уже готовый манчестерский код) через четверть периода после изменения
входного сигнала Вход 1 (по отрицательному фронту исходного тактового сигнала).
20
Амплитудными ограничителями или просто ограничителями называются функциональные
преобразователи, у которых выходное напряжение по форме совпадает с входным до определенного значения, называемого у р о в н е м о г р а н и ч е н и я , а по достижении его остается
неизменным. Различают ограничение по максимуму («сверху»), по минимуму («снизу») и двустороннее (рис. 6.33, а — в).
Основными требованиями, предъявляемыми к ограничителям, являются стабильность
положения точки излома передаточной характеристики, стабильность уровней ограничения и
малые частотные искажения.
Различают ограничители на пассивных компонентах и усилители-ограничители.
Ограничители на пассивных компонентах выполняют с использованием диодов и
стабилитронов. В зависимости от способа включения их подразделяют на схемы с последовательным и параллельным включением нелинейного элемента.
Ограничители с последовательным включением диода могут производить как ограничения
снизу, сверху, так и двустороннее. Схемы ограничителей и временные диаграммы показаны на
рис. 6.34. Работа цепей, ограничивающих сигналы, основана на нелинейности вольт-амперной
характеристик диода. В открытом состоянии диод подключает нагрузку к источнику сигнала, а в
закрытом - отключает ее. При открытом состоянии диода выходное напряжение определяется
коэффициентом передачи. Для схем одностороннего ограничения
Knp = Rн(RH + R0TK + Rи),
(6.145)
где Rи и R0JK внутреннее и прямое сопротивление источника сигнала и диода.
При R0TK + Rи<<RH Кпр1. В закрытом состоянии коэффициент передачи при Ео = 0
K0гP = Rн/(RH + Rи + Rзак),
(6.146)
где Rзак — обратное сопротивление диода в закрытом состоянии.
Так, при Rзак»RH, что обычно имеет место, Когр 0.
Из выражений (6.145) и (6.146) видно, что для повышения коэффициента передачи необходимо,
чтобы RH>>Rи + ROTK. Для получения меньшего напряжения в закрытом состоянии требуется
выполнить условие RH<<Rи + Rзак.
1
Изменяя значения напряжений смещения Е0 можно менять уровень ограничения.
В ограничителях с параллельным включением диода (рис. 6.35) ограничение происходит в
моменты времени, когда диод открыт. Все приращения входного напряжения, вызывающие
изменения тока в цепи, падают на резисторе Rorp, который иногда называют балластным. Наличие
Rorp обязательно для схем с включением нелинейного элемента параллельно с нагрузкой.
Если Rогр>>R0TK, то при открытом диоде практически все приложенное напряжение падает на
сопротивлении Rorp. Коэффициент передачи в области ограничения (при открытом диоде и E0 = 0)
определяют из уравнения
Korp = Rнпp/(Rи + Rorp + Rнпр),
(6.147)
где Rнпр = Rн || R0TK; RН — сопротивление нагрузки.
При закрытом диоде коэффициент передачи ограничителя равен
Kпр = Rнобр/(Rи+Rнобр + Rогр),
(6-148)
где Rнобр = Rн || Rзак.
Часто с достаточной точностью можно считать, что
Rнобр = Rн.
Чтобы приблизить коэффициент передачи в режиме ограничения к нулю, а в режиме
пропускания — к единице, параметры элементов ограничителя необходимо выбирать из условий
RH>>R0TK; RH>>Ru + Rorp.
Уровень ограничения изменяется в зависимости от значения и полярности опорного
напряжения Е0.
Схемы ограничителей напряжения со стабилитронами приведены на рис. 6.36, а и 6.37, а — в.
В них без введения дополнительных источников опорного напряжения Е0 можно обеспечить
ограничение на уровне напряжения стабилизации стабилитрона UCT. Для получения
одностороннего ограничения последовательно со стабилитроном включают диод. Для той
полуволны, которая ограничивается, диод включен в прямом направлении, а стабилитрон — в
обратном. Режим пробоя стабилитрона возникает при достижении входным сигналом значения
UCT. Для другой полуволны диод включен в обратном направлении. Он не пропускает входной
сигнал, и ограничитель не влияет на напряжение выходной цепи. Соответствующим включением
стабилитрона и диода можно получить ограничение по максимуму (рис. 6.36 а), по минимуму
(рис. 6.36, б) и двустороннее (рис. 6.36, в). Так как в режиме стабилизации (пробоя)
2
дифференциальное сопротивление стабилитрона невелико
приведенные схемы
(доли
Ом — несколько
Ом),
то
обеспечивают стабильный уровень ограничения напряжения. Он мало меняется при
существенных изменениях температуры окружающей среды. В области повышенных частот на
форму выходного сигнала оказывает влияние барьерная емкость стабилитрона, из-за которой
излом характеристики оказывается не таким резким, как это следует из его вольт-амперной
характеристики для постоянного тока. Поэтому при создании ограничителей коротких сигналов
следует применять стабилитроны со сниженной барьерной емкостью, например 2С175Е, КС182Е,
2С211Е. Для двустороннего ограничения целесообразно использовать двуханодные стабилитроны,
например 2С170А, 2С182А, для которых нормирована асимметрия напряжений стабилизации.
При последовательном включении стабилитронов их пробой наступает только при напряжении
Uст. С момента пробоя выходной сигнал практически повторяет входной ввиду малого
сопротивления пробитого стабилитрона и диода, включенного в прямом направлении. Данные
схемы целесообразно применять тогда, когда требуется пропустить сигналы уровня меньше (рис.
6.37, а, г) и больше UCT (рис. 6.37, б, д), меньше и больше UCT (рис. 6.37, в, е). Как у ограничителей
с диодами, уровни ограничения можно изменять с помощью дополнительных постоянных
напряжений.
При работе на высоких частотах или при воздействии коротких импульсов характеристики
ограничителей отличаются от тех, которые они имеют в статическом режиме. Это происходит изза влияния барьерных емкостей и переходных процессов в диодах, что необходимо учитывать при
создании быстродействующих устройств.
В ряде случаев импульс входного сигнала подают на ограничитель через разделительный
конденсатор, наличие которого может вызвать изменение уровня ограничения. Это обусловлено
тем, что во время действия сигнала в конденсаторе накапливается электрический заряд, а во время
паузы заряд уменьшается. Введение в схему диода с ярко выраженными нелинейными свойствами
приводит к тому, что за время паузы рассеивается только часть накопленной энергии. В результате
на конденсаторе появляется постоянное напряжение, которое часто называют динамическим
смещением.
3
Для иллюстрации сказанного рассмотрим работу ограничителя, приведенного на рис. 6.37, ж,
при подаче на его вход синусоидального напряжения.
Если бы диода не было, постоянная составляющая напряжения на конденсаторе была бы равна
нулю, так как энергия, накопленная за время одного полупериода, рассеивалась бы за время
другого.
Введение диода приводит к тому, что скорости разрядки и зарядки конденсатора будут
разными. Зарядка конденсатора происходит в ту часть периода входного сигнала, когда диод
открыт. Постоянная времени зарядки
Во время разрядки диод закрыт и постоянная времени цепи разрядки
р = RcС.
(6.150)
Таким образом, р>3 и, следовательно, при симметричной форме входного сигнала на
конденсаторе С появится постоянная составляющая напряжения Uсо (рис. 6.37, з, и). Значение
этой составляющей таково, что увеличение заряда на обкладках конденсатора за время зарядки
равно уменьшению заряда за время разрядки. Смещение рабочей точки ограничителя вследствие
зарядки конденсатора до значения Uco применяют для поддержания уровня выходного
напряжения, равного заданному постоянного значению. Цепи подобного назначения носят
название ф и к с а т о р о в у р о в н я .
Когда резистор Rогр замкнут накоротко, получается цепь фиксации на нулевом уровне. Если на
вход такой цепи поступают двухполярные импульсы сложной формы, то конденсатор С
заряжается до уровня Uco=Um1. В результате выходное напряжение смещено относительно
входного приблизительно на Um1. При правильном подборе элементов выходной сигнал будет
однополярным.
При необходимости зафиксировать напряжение на другом уровне последовательно с диодом
включают источник Е0, значение напряжения и полярность которого определяют уровень
фиксации выходного напряжения.
Фиксаторы уровня широко применяются в устройствах, где требуется восстановление
постоянной составляющей входного сигнала, потерянной вследствие его прохождения через RСцепи.
Рассмотренные простейшие ограничители на диодах имеют ряд существенных недостатков,
которые ограничивают область их применения в точных устройствах измерительной техники и
автоматики. К ним относятся: 1) температурная нестабильность уровня ограничения из-за
изменения контактной разности потенциалов у p-n-перехода диода; 2) трудности ограничения
уровней малых или соизмеримых с контактной разностью потенциалов диода сигналов; 3) разные
уровни ограничения у ограничителей на диодах одного и того же типа; 4) колебания уровня
ограничения в зависимости от входного сигнала из-за конечного значения прямого сопротивления
диода, которое к тому же определяется током, протекающим через него.
Применение усилителей, в частности ОУ, позволяет существенно улучшить основные
характеристики ограничительных устройств.
Используется значительное количество различных схем включения ОУ. Однако все они
основаны на едином принципе— введении нелинейных элементов (диодов, транзисторов или
стабилитронов) в цепь обратной связи. Рассмотрим несколько вариантов схем построения
ограничителей на ОУ.
На рис. 6.38, а показан ограничитель с резистивным делителем в цепи обратной связи, в
котором нелинейный элемент (диод) включен в цепь параллельной обратной связи. Этот диод
открывается в тот момент времени, когда напряжение на нем превысит контактную разность
потенциалов UK. Пока диод закрыт, коэффициент передачи ограничителя определяют из
уравнения
4
После отпирания диода коэффициент передачи становится равным
причем К2<К1.
Найдем выходное напряжение Uвых1, при котором диод откроется. Если считать контактную
разность потенциалов диода постоянной и равной UK, а коэффициент усиления ОУ — достаточно
высоким, так что разность потенциалов между его входами близка к нулю, то выходное
напряжение, при котором диод откроется, находится из уравнения
где
Uвыхl = Uвх1R2/R1. Отсюда
Изменяя значение постоянного напряжения U1 задают уровень ограничения.
Характеристика данного ограничителя показана на рис. 6.38, о. Из нее видно, что выходное
напряжение продолжает изменяться при увеличении входного,
только скорость этого
изменения существенно уменьшается. Для улучшения характеристики ограничителя следует
обеспечить выполнение условия R3<<R2. В этом случае коэффициент передачи, характеризуемый
углом наклона характеристики ограничителя, по достижении выходным напряжением значения
Uвых стремится к нулю и характеристика на этом участке идет горизонтально.
Таким образом, условие удовлетворительной работы ограничителя можно записать в виде
R2»Rотк + Rз,
(6.155)
где Rотк — сопротивление диода в открытом состоянии.
Включая вместо диода биполярный транзистор, существенно улучшают характеристику
ограничителя и обеспечивают неизменный уровень выходного напряжения при больших изменениях входного сигнала (рис. 6.38, в, г). Преимущество такой замены заключается в том, что
при этом происходит уменьшение (приблизительно в h21 э раз) тока, протекающего через резистор
R3, и соответственно уменьшение изменения выходного напряжения, которое обеспечивает этот
ток. Действительно, в схеме рис. 6.38, а приращение входного напряжения Um вызывает
приращение тока, протекающего через резистор R1,
i1Uвх/R1.
(6.156)
Этот ток вызовет приращение выходного напряжения:
Uвых=-i1[R2 || (Rотк + R3)]
(6.157)
При включении в цепь ОС биполярного транзистора, у которого переход база —эмиттер
5
полностью идентичен диоду, приращение тока эмиттера iэ=iэ1, а соответственно ток базы iэ =
(1 +h*21э) iб- Отсюда следует, что ток резистора уменьшился в l+h*21э раз и при одинаковых
приращениях входного сигнала выходное напряжение изменяется в 1+h*21э раз меньше, чем в
ограничителе на рис. 6.38, а.
При создании прецизионных ограничителей применяют схемы рис. 6.39, а, в, д. В схеме рис.
6.39, а обеспечивается симметричное ограничение напряжения с малым значением его
несимметрии. Это обеспечивается благодаря использованию для обеих полуволн одного
стабилитрона VD5. Для уменьшения влияния емкости стабилитрона и увеличения температурной
стабильности уровня ограничения стабилитрон непрерывно открыт напряжениями Е0, —Е0 и
представляет собой источник постоянного стабильного напряжения UCT. Диоды VD1, VD4 или
VD2, VD3 открываются в том случае, когда выходное напряжение достигает значения UCT + 2UK.
Вследствие малого сопротивления открытых диодов и стабилитрона выходное напряжение
фиксируется на уровне ограничения. При малом температурном коэффициенте стабилизации
напряжения стабилитрона температурный дрейф уровня ограничения около—5 мВ/град. Кроме
того, постоянное напряжение на стабилитроне обеспечивает выигрыш в быстродействии, так как
не затрачивается время на перезарядку емкостей стабилитрона. Соответственно существенно
расширяется рабочая полоса частот (при погрешности 1% она достигает 300 кГц).
Прецизионный ограничитель рис. 6.39, в имеет амплитудную характеристику, показанную на
рис. 6.39, г. У него при отрицательной полярности входного напряжения открыт диод VD1.
Выходное напряжение ОУ Uвыхоу= — UвхRотк/R1. Входное напряжение ОУ, которое является
выходным для ограничителя, меньше Uвых в Куи раз [Uвых = UBXROTK/(KyuR1) ] и стремится к нулю.
При закрытом VD1 и открытом VD2 диодах выходное напряжение Uвых = - UBXR2 /R1.
6
Уровень ограничения можно смещать подавая на инвертирующий вход дополнительное
напряжение от источника питания (пунктир).
С целью увеличения точности уровня ограничения можно использовать схему рис. 6.39, д. В
ней R4>>R3 и усилитель DA2 работает практически как пороговое устройство. Если входное
напряжение ОУ DA2 меньше значения порога, определяемого напряжением Uon, то усилитель
находится в ограничении по отрицательной полярности. При этом диод VD заперт и ограничения
сигнала не происходит. Как только Uвых приблизится к пороговому значению, ОУ DA2 выйдет из
области насыщения. При положительном значении его выходного напряжения диод отопрется и
зафиксируется уровень выходного напряжения. В этом случае стабильность уровня ограничения
чрезвычайно высокая и зависит в основном от стабильности Uoп и коэффициента усиления ОУ
DA2, который работает в режиме компаратора напряжения. Конденсатор С приходится вводить
для предотвращения самовозбуждения, которое может возникнуть вследствие большого петлевого
усиления.
Ограничители широко применяются для защиты электронных цепей и при преобразованиях
измерительных сигналов.
7
Запоминающие устройства
Основные сведения.
Система параметров. Классификация
Запоминающие устройства (ЗУ) служат для хранения информации и обмена ею с другими
ЦУ. Микросхемы памяти в общем объеме выпуска ИС занимают около 40% и играют
важнейшую роль во многих системах различного назначения. Микросхемы и системы памяти
постоянно совершенствуются как в области схемотехнологии, так и в области развития новых
архитектур. В настоящее время созданы и используются десятки различных типов ЗУ
Важнейшие параметры ЗУ находятся в противоречии. Так, например, большая
информационная емкость не сочетается с высоким быстродействием, а быстродействие в свою
очередь не сочетается с низкой стоимостью. Поэтому системам памяти свойственна
многоступенчатая иерархическая структура, и в зависимости от роли того или иного ЗУ его
реализация может быть существенно различной.
В наиболее развитой иерархии памяти ЭВМ можно выделить следующие уровни:
1) регистровые ЗУ, находящиеся в составе процессора или других устройств (т. е.
внутренние для этих блоков), благодаря которым уменьшается число обращений к другим
уровням памяти, реализованным вне процессора и требующим большего времени для операций
обмена информацией;
2) кэш-память, служащая для хранения копий информации, используемой в текущих
операциях обмена. Высокое быстродействие кэш-памяти повышает производительность ЭВМ;
3) основная память (оперативная, постоянная, полу постоянная), работающая в режиме
непосредственного обмена с процессором и по возможности согласованная с ним по
быстродействию. Исполняемый в текущий момент фрагмент программы обязательно находится
в основной памяти;
4) специализированные виды памяти, характерные для некоторых специфических
архитектур (многопортовые, ассоциативные, видеопамять и др.);
5) внешняя память, хранящая большие объемы информации. Эта память обычно
реализуется на основе устройств с подвижным носителем информации (магнитные и
оптические диски, магнитные ленты и др.)
Важнейшие параметры ЗУ
Информационная емкость — максимально возможный объем хранимой информации.
Выражается в битах или словах (в частности, в байтах). Бит хранится запоминающим
элементом (ЗЭ), а слово — запоминающей ячейкой (ЗЯ). т. е. группой ЗЭ, к которым возможно
лишь одновременное обращение. Добавление к единице измерения множителя "К" (кило)
означает умножение на 210= 1024, а множителя "М" (мега) — умножение на 2 20 — 1048576.
Организация ЗУ — произведение числа хранимых слов на их разрядность. Видно, что это дает
информационную емкость ЗУ, однако при одной и той же информационной емкости
организация ЗУ может быть различной, так что организация является самостоятельным важным
параметром.
Быстродействие (производительность) ЗУ оценивают временами считывания, записи и
длительностями циклов чтения/записи. Время считывания — интервал между моментами
появления сигнала чтения и слова на выходе ЗУ Время записи — интервал после появления
сигнала записи, достаточный для установления ЗЯ в состояние, задаваемое входным словом.
Минимально допустимый интервал между последовательными чтениями или записями
образует соответствующий цикл. Длительности циклов могут превышать времена чтения или
записи, т. к. после этих операций может потребоваться время для восстановления необходимого
начального состояния ЗУ. Время чтения, записи и длительности циклов — традиционные
параметры. Для некоторых современных ЗУ они должны быть дополнены новыми. Причиной
является более сложный характер доступа к хранимым данным, когда обращение к первому
слову некоторой группы слов (пакета) требует большего времени, чем обращение к
последующим. Для таких режимов вводят параметр времени доступа при первом обращении
(Latency) и темпа передач для последующих слов пакета (Bandwidth). Темп передач в свою
очередь оценивается двумя значениями — предельным (внутри пакета) и усредненным (с
учетом Latency). С уменьшением пакета усредненный темп снижается, все более отличаясь от
предельного.
Помимо указанных основных параметров для ЗУ указывают еще целый набор временных
интервалов. Перечисленные выше динамические параметры являются эксплуатационными
(измеряемыми). Кроме них, существует ряд режимных параметров, обеспечение которых
необходимо для нормального функционирования ЗУ, поскольку оно имеет несколько сигналов
управления, для которых должно быть обеспечено определенное взаимное расположение во
времени. Для этих сигналов задаются длительности и ограничения по взаимному положению во
времени.
Один из возможных наборов сигналов ЗУ (рис. 4.1, а) включает следующие сигналы:
А— адрес, разрядность которого n определяется числом ячеек ЗУ, т. е. максимально
возможным числом хранимых в ЗУ слов. Для ЗУ типично число ячеек, выражаемое целой
степенью двойки. Адрес является номером ячейки, к которой идет обращение. Очевидно, что
разрядность адреса связана с числом хранимых слов N соотношением n = log2N (имеется в виду
максимально возможное число хранимых слов). Например, ЗУ с информационной емкостью
64К слов имеет 16-разрядные адреса, выражаемые словами
А = A15A14A13...Ao;
CS — (Chip Select) или СЕ (Chip Enable), который разрешает или запрещает работу данной
микросхемы;
R/W — (Read/Write) задает выполняемую операцию (при единичном значении — чтение,
при нулевом — запись);
DI и DO (Data Input) и (Data Output) — шины входных и выходных данных, разрядность
которых m определяется организацией ЗУ (разрядностью его ячеек). В некоторых ЗУ эти
линии объединены.
Требования к взаимному временному положению двух сигналов (А и В) задаются
временами предустановки, удержания и сохранения.
Время предустановки сигнала А относительно сигнала В tsu(А-В) есть интервал между
началами обоих сигналов.
Время удержания tH (А- B) - это интервал между началом сигнала А и окончанием сигнала В.
Время сохранения tv (A -B)- интервал между окончанием сигнала А и окончанием сигнала В.
Длительности сигналов обозначаются как tw (индекс от слова Width — ширина).
Для ЗУ характерна такая последовательность сигналов. Прежде всего подается адрес, чтобы
последующие операции не коснулись какой-либо другой ячейки, кроме выбранной. Затем
разрешается работа микросхемы сигналом CS (CF) и подается строб чтения Записи R/W
(взаимное положение сигналов CS и R/W для разных ЗУ может быть различным). Если задана,
например, операция чтения, то после подачи перечисленных сигналов ЗУ готовит данные для
чтения, что требует определенного времени. Задний фронт сигнала R/W, положение которого
во времени должно обеспечивать установление правильных данных на выходе ЗУ, считывает
данные.
Пример временной диаграммы для рассмотренного набора cигналов ЗУ и операции чтения
приведен на рис. 4.1, 6.
Индексом А (от слова Access) обозначаются согласно стандарту времена доступа —
интервалы времени от появления того или иного управляющего сигнала до появления
информационного сигнала на выходе. Время доступа относительно сигнала адреса
обозначается, если следовать правилу, как tA(A), но часто просто как tA. Аналогично этому,
время доступа относительно сигнала CS, т. е. tA(cs) часто обозначается просто как tсs- Время tA
называют также временем выборки, а время tcs — временем выбора.
Кроме отмеченных параметров для ЗУ используется и ряд других (уровни напряжений,
токи, емкости выводок, температурный диапазон и т. д.), которые не требуют специального
рассмотрения, т. к. они традиционны для цифровой схемотехники. Исключение составлявляет
свойство энергонезависимости, т.е. способности ЗУ сохранять данные при отключении
напряжения питания. Энергонезависимость может быть естественной, т.е. присущей самим ЗЭ,
или искусственной, достигаемой введением резервных источников питания, автоматически
подключаемых к накопителю ЗУ при снятии основного питания.
Классификация ЗУ
Для классификации ЗУ (рис. 4.2) важнейшим признаком является способ доступа к данным.
При адресном доступе код на адресном входе указывает ячейку, с которой ведется обмен.
Все ячейки адресной памяти в момент обращения равнодоступны. Эти ЗУ наиболее
разработаны, и другие виды памяти часто строят на основе адресной с соответствующими
модификациями.
Адресные ЗУ делятся на RAM (Random Access Memory) и ROM (Read-Only Memory).
Русские синонимы термина RAM: ОЗУ (оперативные ЗУ) или ЗУПВ (ЗУ с произвольной
выборкой). Оперативные ЗУ хранят данные, участвующие в обмене при исполнении текущей
программы, которые могут быть изменены в произвольный момент времени. Запоминающие
элементы ОЗУ, как правило, не обладают энергонезависимостью.
В ROM (русский эквивалент — ПЗУ, т. е. постоянные ЗУ) содержимое либо вообще не
изменяется, либо изменяется, но редко и в специальном режиме. Для рабочего режима это
"память только для чтения".
RAM делятся на статические и динамические. В первом варианте запоминающими
элементами являются триггеры, сохраняющие свое состояние, пока схема находится пол
питанием и нет новой записи данных. Во втором варианте данные хранятся в виде зарядов
конденсаторов, образуемых элементами МОП-структур. Саморазряд конденсаторов ведет к
разрушению данных, поэтому они должны периодически (каждые несколько миллисекунд)
регенерироваться. В то же время плотность упаковки динамических элементов памяти в
несколько раз превышает плотность упаковки, достижимую в статических RAM.
Регенерация данных в динамических ЗУ осуществляется с помощью специальных
контроллеров. Разработаны также ЗУ с динамическими запоминающими элементами, имеющие
внутреннюю встроенную систему регенерации, у которых внешнее поведение относительно
управляющих сигналов становится аналогичным поведению статических ЗУ. Такие ЗУ
называют квазистатическими.
Статические ЗУ называются SRAM (Static RAM), а динамические — DRAM (Dynamic
RAM).
Статические ОЗУ можно разделить на асинхронные, тактируемые и синхронные
(конвейерные). В асинхронных сигналы управления могут задаваться как импульсами, так и
уровнями. Например, сигнал разрешения работы CS может оставаться неизменным и
разрешающим на протяжении многих циклов обращения к памяти. В тактируемых ЗУ
некоторые сигналы обязательно должны быть импульсными, например, сигнал разрешения
работы СS и каждом цикле обращения к памяти должен переходить из пассивного состояния в
активное (должен формироваться фронт этого сигнала в каждом цикле). Этот тип ЗУ называют
часто синхронным. Здесь использован термин "тактируемые", чтобы "освободить" термин
"синхронные" для новых типов ЗУ, в которых организован конвейерный тракт передачи
данных, синхронизируемый от тактовой системы процессора, что дает повышение темпа
передач данных в несколько раз.
Динамические ЗУ характеризуются наибольшей информационной емкостью и невысокой
стоимостью, поэтому именно они используются как основная память ЭВМ. Поскольку от этой
памяти требуется высокое быстродействие, разработаны многочисленные архитектуры
повышенного быстродействия, перечисленные в классификации.
Статические ЗУ в 4...5 раз дороже динамических и приблизительно во столько же раз
меньше по информационной емкости. Их достоинством является высокое быстродействие, а
типичной областью использования — схемы кэш-памяти.
Постоянная память типа ROM (М) программируется при изготовлении методами
интегральной технологии с помощью одной из используемых при этом масок. В русском языке
ее можно назвать памятью типа ПЗУМ (ПЗУ масочные). Для потребителя это в полном смысле
слова постоянная память, т. к. изменить ее содержимое он не может.
В следующих трех разновидностях ROM в обозначениях присутствует буква Р (от
Programmable). Это программируемая пользователем память (в русской терминологии ППЗУ—
программируемые ПЗУ). Ее содержимое записывается либо однократно (в PROM), либо может
быть заменено путем стирания старой информации и записи новой (в EPROM и EEPROM). В
EPROM стирание выполняется с помощью облучения кристалла ультрафиолетовыми лучами,
ее русское название РПЗУ-УФ (репрограммируемое ПЗУ с УФ-стиранием). В EEPROM
стирание производится электрическими сигналами, ее русское название РПЗУ-ЭС
(репрограммируемое
ПЗУ
с
электрическим
стиранием).
Английские
названия
расшифровываются как Electrically Programmable ROM и Electrically Erasable Programmable
ROM. Программирование PROM и репрограммирование EPROM и EEPROM производятся в
обычных лабораторных условиях с помощью либо специальных программаторов, либо
специальных режимов без специальных приборов (для EEPROM).
Память типа Flash по запоминающему элементу подобна памяти типа EEPROM (или иначе
2
E PROM), но имеет структурные и технологические особенности, позволяющие выделить ее в
отдельный вид.
Запись данных и для EPROM и для E2PROM производится электрическими сигналами
В ЗУ с последовательным доступом записываемые данные образуют некоторую очередь.
Считывание происходит из очереди слово за словом либо в порядке записи, либо в обратном
порядке. Моделью такого ЗУ является последовательная цепочка запоминающих элементов, в
которой данные передаются между соседними элементами.
Прямой порядок считывания имеет место в буферах FIFO с дисциплиной "первый пришел первый вышел" (First in — First Out), а также в файловых и циклических ЗУ.
Разница между памятью FIFO и файловым ЗУ состоит в том, что в FIFO запись в пустой
буфер сразу же становится доступной для чтения, т. е. поступает в конец цепочки (модели ЗУ).
В файловых ЗУ данные поступают в начало цепочки и появляются на выходе после некоторого
числа обращений, равного числу элементов в цепочке. При независимости операций считывания и записи фактическое расположение данных в ЗУ на момент считывания не связано с
каким-либо внешним признаком. Поэтому записываемые данные объединяют в блоки,
обрамляемые специальными символами конца и начала (файлы). Прием данных из файлового
ЗУ начинается после обнаружения приемником символа начала блока.
В циклических ЗУ слова доступны одно за другим с постоянным периодом, определяемым
емкостью памяти. К такому типу среди полупроводниковых ЗУ относится видеопамять
(VRAM).
Считывание в обратном порядке свойственно стековым ЗУ, для которых реализуется
дисциплина "последний пришел — первый вышел". Такие ЗУ называют буферами LIFO (Last In
— First Out).
Время доступа к конкретной единице хранимой информации в последовательных ЗУ
представляет собою случайную величину. В наихудшем случае для такого доступа может
потребоваться просмотр всего объема хранимых данных.
Ассоциативный доступ реализует поиск информации но некоторому признаку, а не по ее
расположению в памяти (адресу или месту в очереди) В наиболее полной версии все хранимые
в памяти слова одновременно проверяются на соответствие признаку, например, на совпадение
определенных полей слов (тегов — от английского слова tag) с признаком, задаваемым
входным словом (теговым адресом). На выход выдаются слова, удовлетворяющие признаку.
Дисциплина выдачи слов, если тегу удовлетворяют несколько слов, а также дисциплина записи
новых данных могут быть разными Основная область применения ассоциативной памяти в
современных ЭВМ кэширование данных.
Технико-экономические параметры ЗУ существенно зависят or их схемотехнологической
реализации По этому признаку также возможна классификация ЗУ, однако удобнее
рассматривать этот вопрос применительно к отдельным типам памяти.
Основные структуры запоминающих устройств
Адресные ЗУ представлены в классификации статическими и динамическими оперативными
устройствами и памятью типа ROM. Многочисленные варианты этих ЗУ имеют много общего с
точки зрения структурных схем что делает более рациональным не конкретное рассмотрение
каждого ЗУ в полном объеме, а изучение некоторых обобщенных структур с последующим
описанием запоминающих элементов для различных ЗУ. Общность структур особенно
проявляется для статических ОЗУ и памяти типа ROM. Структуры динамических ОЗУ имеют
свою специфику и будут рассмотрены позже. Для статических ОЗУ и памяти типа ROM
наиболее характерны структуры 2D, 3D и 2DM
Структура 2DD
В структуре 2D (рис. 4.3) запоминающие элементы ЗЭ организованы в прямоугольную
матрицу размерностью М = k*m, где М — информационная емкость памяти в битах; k - число
хранимых слов; m — их разрядность.
Дешифратор адресного кода DC при наличии разрешающего сигнала CS (Chip Select —
сигнала выбора микросхемы) активизирует одну из выходных линий, разрешая одновременный
доступ ко всем элементам выбранной строки, хранящей слово, адрес которого соответствует
номеру строки. Элементы одного столбца соединены вертикальной линией — внутренней
линией данных (разрядной линией, линией записи/считывания). Элементы столбца хранят
одноименные биты всех слов. Направление обмена определяется усилителями чтения/записи
под воздействием сигнала R/W (Read —чтение, Write — запись)
Структура типа 2D применяется лишь в ЗУ малой информационной емкости, т. к. при росте
емкости проявляется несколько ее недостатков, наиболее очевидным из которых является
чрезмерное усложнение дешифратора адреса (число выходов дешифратора равно числу
хранимых слов).
Структура 3DD
Структура 3D позволяет резко упростить дешифраторы адреса с помощью
двухкоординатной выборки запоминающих элементов. Принцип двухкоординатной выборки
поясняется (рис. 4.4, а) на примере ЗУ типа ROM, реализующего только операции чтения
данных.
Здесь код адреса разрядностью п делится на две половины, каждая из которых декодируется
отдельно. Выбирается запоминающий элемент, находящийся на пересечении активных линий
выходов обоих дешифраторов. Таких пересечений будет как раз
Суммарное число выходов обоих дешифраторов составляет 2n/2 + 2n/2 = 2n/2+1, что гораздо
меньше, чем 2n при реальных значениях n. Уже для ЗУ небольшой емкости видна эта
существенная разница: для структуры 2D при хранении 1К слов потребовался бы дешифратор с
1024 выходами, тогда как для структуры типа 3D нужны два дешифратора с 32 выходами
каждый. Недостатком структуры 3D в первую очередь является усложнение элементов памяти,
имеющих двухкоординатную выборку.
Структура типа 3D, показанная на рис. 4.4, а для ЗУ с одноразрядной организацией, может
применяться и в ЗУ с многоразрядной организацией (рис. 4.4, б), приобретая при этом
"трехмерный" характер. В этом случае несколько матриц управляются от двух дешифраторов,
относительно которьх они включены параллельно. Каждая матрица выдает один бит
адресованного слова, а число матриц равно разрядности хранимых слов. Структуры типа 3D
имеют также довольно ограниченное применение, поскольку в структурах типа 2DM (2D
модифицированная) сочетаются достоинства обеих рассмотренных структур — упрощается
дешифрация адреса и не требуются запоминающие элементы с двухкоординатной выборкой.
Структура 2DDM
ЗУ типа ROM (рис. 4.5, а) структуры 2DM для матрицы запоминающих элементов с
адресацией от дешифратора DCx имеет как бы характер структуры 2D: возбужденный выход
дешифратора выбирает целую строку. Однако в отличие от структуры 2D, длина строки не
равна разрядности хранимых слов. а многократно ее превышает. При этом число строк матрицы
уменьшается и, соответственно, уменьшается число выходов дешифратора. Для выбора одной
из строк служат не все разряды адресного кода, а их часть An-1... Аk Остальные разряды адреса
(от Ak-1 до Ао) используются, чтобы выбрать необходимое слово из того множества слов,
которое содержится в строке. Это выполняется с помощью мультиплексоров, на адресные
входы которых подаются коды Аk-1... Ао. Длина строки равна m2k, где m — разрядность хранимых слов. Из каждого "отрезка" строки длиной 2k мультиплексор выбирает один бит. На
выходах мультиплексоров формируется выходное слово. По paзрешению сигнала CS,
поступающего на входы ОЕ управляемых буферов с тремя состояниями, выходное слово
передается на внешнюю шину.
На рис. 4.5, б в более общем виде структура 2DM показана для ЗУ типа RAM с операциями
чтения и записи. Из матрицы М по-прежнему считывается "длинная" строка.
Данные в нужный отрезок этой строки записываются (или считываются из нее)
управляемыми буферами данных BD, воспринимающими выходные сигналы второго
дешифратора DCy, и выполняющими не только функции мультиплексирования, но и функции
изменения направления передачи данных под воздействием сигнала R/W.
Память с последовательным доступом
Память с последовательным доступом строится либо с использованием продвижения
данных в цепочке элементов (по подобию с регистрами сдвига), либо с хранением данных в
адресном ЗУ с необходимым управлением адресом доступа.
Основными представителями этого вида памяти являются видеопамять, буфер FIFO и стек.
Видеопамять
Видеопамять работает циклично, на ее выходе последовательно в порядке сканирования
экрана монитора лучом появляются коды, задающие параметры светимости (цвет, яркость)
элементарных точек экрана — пикселов. Текущее изображение на мониторе — кадр —
представлено последовательностью слов, длина которой равна числу пикселов экрана. Слово,
соответствующее одному пикселу, может иметь разрядность от 8 (для черно-белых мониторов)
до 24 (для полноцветного режима).
При реализации на основе адресной памяти циклический доступ к данным обеспечивается
счетчиком адреса с модулем, равным числу запоминаемых слов. При считывании после
каждого обращения адрес увеличивается на единицу, обеспечивая последовательное обращение
ко всем ячейкам ЗУ. При переполнении счетчика формируется сигнал начала кадра для
управления монитором (для запуска кадровой синхронизации). Запись возможна в пакетном
режиме или режиме одиночных записей. В первом случае сигнал переполнения счетчика и его
переход на начальный адрес являются сигналом начала передачи блока данных из основной
памяти или видеобуфера. Во втором случае адрес изменяемой ячейки (номер пиксела) и данные
сохраняются в буфере, а в момент совпадения этого адреса и содержимого счетчика
выполняется один цикл записи нового слова. Все остальное время ЗУ работает обычным
образом.
Построение циклических ЗУ с продвижением информации (рис. 4.6) показано с
представлением элементов хранения и перезаписи данных в виде статических регистров
При считывании выбран нижний канал мультиплексора MUX и записанные данные
постоянно переписываются с выхода на вход цепочки запоминающих элементов. В
последовательность данных вводятся специальные коды синхросигналов (кадровых и
строчных, но на рис. 4.6 для пояснения принципа показан только кадровый). Появление кода
синхросигнала на выходе обнаруживается компаратором и синхронизирует запуск развертки
монитора.
Пакетная запись может начинаться после появления запроса передачи в момент
прохождения кода кадрового синхросигнала. При этом вырабатывается сигнал разрешения
передачи кадра из памяти ЭВМ на вход D1, а мультиплексор переключается на верхний канал.
После приема целого кадра счетчик CTR, емкость которого равна хитине кадра, переполняется,
и под воздействием сигнала переполнения ЗУ возвращается в режим циклической перезаписи.
При одиночных записях устройство должно иметь дополнительно схему сравнения кода
счетчика и входного адресного кода (номера заменяемого кода пиксела). При их совпадении
мультиплексор переключается на верхний канал на один такт работы, чем обеспечивается
замена всего одного слова.
Буфер FIFO
Буфер FIFO, пример структуры которого приведен на рис. 4.7, представляет собою ЗУ для
хранения очередей данных (списков) с порядком выборки слов, таким же, что и порядок их
поступления. Интервалы между словами могут быть совершенно различными, т. к. моменты
записи слова в буфер и считывания из него задаются внешними сигналами управления
независимо друг от друга.
Возможность иметь разный темп приема и выдачи слов необходима, например, если
приемник способен принимать данные, поступающие регулярно с некоторой частотой, а
источник информации выдает слова в более быстром темпе и, может быть, к тому же не
регулярно. Такие данные поступают в их темпе в буфер FIFO, а из него считываются регулярно
с необходимой для приемника данных частотой. Новое слово ставится в конец очереди,
считывание осуществляется с начала очереди.
В схеме (рис. 4.7) перед началом работы оба счетчика адресов CTR1 и CTR2 сбрасываются.
При записи адреса увеличиваются на единицу при каждом обращении, т. е. возрастают, начиная
с нулевого. То же происходит при чтении слов, так что адрес чтения всегда "гонится" за
адресом записи. Если адреса сравняются при чтении, то буфер пуст. Если адреса сравняются
при записи, то буфер полон (адресами занята вся емкость счетчика) Эти ситуации отмечаются
соответствующими сигналами. Если буфер полон, то нужно прекратить прием данных, а если
пуст, то нужно прекратить чтение. Очередь удлиняется или укорачивается в зависимости от
разности чисел записанных и считанных слов. Переход через нуль осложнений не вызывает.
Задачу построения стека можно решить принципиально аналогичным способом. Эта задача
встречается в дальнейшем изложении при рассмотрении структуры микропроцессора.
Кэш-память
Кэш-память запоминает копии информации, передаваемой между устройствами (прежде
всего между процессором и основной памятью). Она имеет небольшую емкость в сравнении с
основной памятью и более высокое быстродействие (реализуется на триггерных элементах
памяти).
При чтении данных сначала выполняется обращение к кэш-памяти (рис. 4.8). Если в кэше
имеется копия данных адресованной ячейки основной памяти, то кэш вырабатывает сигнал Hit
(попадание) и выдает данные на общую шину данных. В противном случае сигнал Hit не
вырабатывается и выполняется чтение из основной памяти и одновременное помещение
считанных данных в кэш.
Эффективность кэширования обуславливается тем, что большинство прикладных программ
имеют циклический характер и многократно используют одни и те же данные. Поэтому после
первого использования данных из относительно медленной основной памяти повторные
обращения требуют меньше времени. К тому же при использовании процессором кэш-памяти
основная память освобождается, и могут выполняться регенерация данных в динамическом ЗУ
или использование памяти другими устройствами.
Объем кэш-памяти много меньше емкости основной памяти и любая единица информации,
помещаемая в кэш, должна сопровождаться дополнительными данными (тегом),
определяющими, копией содержания какой ячейки основной памяти является эта единица
информации
В полностью ассоциативной кэш-памяти (FACM, Fully Associated Cache Memory), структура
которой показана на рис. 4.9, каждая ячейка хранит данные, а в поле "тег" — полный
физический адрес информации, копия конторой записана. При любых обменах физический
адрес запрашиваемой информации сравнивается с полями "тег" всех ячеек и при совпадении их
в любой ячейке устанавливается сигнал Hit.
При чтении и значении сигнала Hit = 1 данные выдаются на шину данных, (если же
совпадений нет (Hit = 0), то при чтении из основной памяти данные вместе с адресом
помещаются в свободную или наиболее давно не используемую ячейку кэш-памяти.
При записи данные вместе с адресом сначала, как правило, размещаются в кэш-памяти (в
обнаруженную ячейку при Hit = 1 и свободную при Hit = 0). Копирование данных в основную
память выполняется под управлением специального контроллера, когда нет обращений к
памяти.
Память типа FACM является весьма сложным устройством и используется только при
малых емкостях, главным образом в специальных приложениях.
В то же время этот вид кэш-памяти обеспечивает наибольшую функциональную гибкость и
бесконфликтность адресов, т. к. любую единицу информации можно загрузить в любую ячейку
кэш-памяти.
Сложность FACM заставляет искать иные структуры кэш-памяти, более экономичные по
затратам аппаратных средств на их реализацию. К числу таких структур относятся кэш-память
с прямым размещением и кэш-память с наборно-ассоциативной архитектурой (с ассоциацией
по нескольким направлениям). Для конкретного рассмотрения этих структур укажем, что
главными параметрами кэш-памяти являются размер строки (Cache Line) и их число (рис. 4.10).
Строка представляет собою некоторый набор слов. Ее емкость будем считать соответствующей
странице основной памяти.
В структуре FACM, называемой также структурой с произвольной загрузкой, любую
страницу можно загрузить в любую строку кэш-буфера (рис. 4.11, а). В качестве тега
используется полный физический адрес, если речь идет об адресации отдельных слов, или
старшие разряды этого адреса за вычетом младших (смещения), если смещение адресует слово
в пределах строки.
Иными словами, в этом случае старшие разряды адреса рассматриваются как тег, тогда как
младшие используются для адресации в пределах строки.
В кэш-памяти с прямым размещением (с прямым отображением) несколько страниц
основной памяти строго соответствуют одной строке кэша (рис. 4.11, б). Так как занимать
строку в одно и го же время может только одна страница, нужен специальный ее признак —
тег. Адрес от процессора делится на три части. Младшие разряды (смещение) определяют
положение слова в строке. Средние позволяют выбрать одну из строк кэш-памяти. Оставшиеся
старшие образуют тег. По адресу строки производится считывание. Поле адресов считанной
строки сравнивается с теговым адресом и, если есть совпадение, вырабатывается сигнал Hit
выдачи информации и затем мультиплексированием из строки данных выбирается слово. При
загрузке из внешней памяти заменяется вся строка. Здесь следует отметить, что блочные
передачи в современных системах осуществляются достаточно быстро.
Тег для кэш-памяти с прямым размещением сильно сокращается по разрядности. Обычно
номер строки есть адрес страницы по модулю, равному целой степени двойки. На рис. 4.11, б
это 128. Достоинство кэша с прямым размещением— экономичность по аппаратурным
затратам. Недостаток — ограничения на расположение страниц в кэше, что может не позволить
сформировать в нем оптимальный набор страниц, т. к. передача в кэш страницы вызывает
удаление из него другой, которая, может быть нужна для формирования оптимального набора
страниц.
Промежуточным по сложности и эффективности вариантом между структурами FACM и с
прямым размещением является кэш-память с ассоциацией по нескольким направлениям
(наборно-ассоциативная). В этом варианте несколько строк кэша объединяются в наборы, а
средние разряды адреса памяти определяют уже не одну строку, а набор (рис. 4.11, в). Кэшпамять делится на наборы с небольшим числом строк, кратным двойке, т. е. 2, 4, 8 ... и т. д. (на
рисунке это 2). Страницу основной памяти можно поместить только в тот набор, номер
которого равен адресу страницы по модулю (в данном случае модуль равен 64). Место
страницы в наборе может быть произвольным. Сравнение тегов со старшими разрядами адреса
производится только для строк, входящих в набор.
По числу строк в наборе кэш-памяти различают разнообразные структуры: двухвходовые,
четырехвходовые и т. д.
Для взятого примера используются два отдельных блока памяти для четных строк и
нечетных строк. Одновременно выбираются четные и нечетные строки (слова в них).
Считывание идет от того блока, где имеется совпадение тега и тегового адреса. При этом из
строки через смешение выбирается адресованное слово. При отсутствии совпадений
происходит обращение к основной памяти и замещение строки в одном из блоков кэша.
Блок-схема наборно-ассоциативного кэша показана на рис. 4.11, в. По сравнению с кэшем с
прямым размещением кэш наборно-ассоциативного типа имеет несколько удлиненный тег (во
взятом примере всего на один разряд). Возможность свободного размещения страниц в наборе
позволяет сформировать в кэше лучший состав страниц, т. к. имеется возможность выбрать ту
или иную заменяемую страницу. В современных микропроцессорных системах кэш первого
уровня, обозначаемый L1 (от английского слова Level (внутрипроцессорный)), обычно имеет
наборно-ассоциативную структуру, а кэш второго уровня L2 (внешний) — структуру с прямым
размещением.
Ряд фирм выпускают микросхемы ассоциативной памяти. Например, одна из микросхем
фирмы Cyrix имеет 4К строк, 15-разрядный теговый адрес и 16-разрядный выход. Для
построения кэш-памяти используют чаше всего обычные SRAM в сочетании с кэшконтроллерами.
В высокопроизводительном микропроцессоре Power 3 фирмы IBM использован кэш
наборно-ассоциативного типа емкостью 32 Кбайта для команд и 64 Кбайта для данных на 128
направлений. Для связей с кэшем второго уровня L2 в системе Power 3 применена 256разрядная шина. Емкость кэша L2 от 1 до 16 Мбайт. Кстати говоря, именно МП Power 3
использован в суперкомпьютере, который сумел обыграть чемпиона мира по шахматам Гарри
Каспарова.
B.3. Динамическое ОЗУ.Динамическое Динамическое ОЗУ.ОЗУ.
Конструктивные Динамическое ОЗУ.особенности.
Динамическое ОЗУ со времени своего появления прошло несколько стадий роста, и процесс
ее совершенствования не останавливается. За свою десятилетнюю историю DRAM меняла свой
вид несколько раз. Вначале микросхемы динамического ОЗУ производились в DIP-корпусах.
Затем их сменили модули, состоящие из нескольких микросхем: SIPP, SIMM и, наконец, DIMM
и RIMM. Рассмотрим эти разновидности поподробнее.
B.3.1. Динамическое ОЗУ.Устаревшие Динамическое ОЗУ.модификации.
B.3.1.1. Динамическое ОЗУ.DIP.
Рис. B.3.1. Модуль памяти DIP
DIP- корпус —это исторически самая древняя реализация DRAM. DIP-корпус соответствует
стандарту IC. Обычно это маленький черный корпус из пластмассы, по обеим сторонам
которого располагаются металлические контакты (см. рисунок B.3.1.).
Рис. B.3.2. Банк модулей памяти DIP
Микросхемы (по-другому, чипы) динамического ОЗУ устанавливаются так называемыми
банками. Банки бывают на 64, 256 Кбайт, 1 и 4 Мбайт. Каждый банк состоит из девяти
отдельных одинаковых чипов. Из них восемь чипов предназначены для хранения информации,
а девятый чип служит для проверки четности остальных восьми микросхем этого банка.
Чипы памяти бывают одно и четырехразрядными, и иметь емкость 64 Кбит, 256 Кбит, 1 и 4
Мбит. Обозначение разновидностей микросхем памяти в DIP-корпусах показано в таблице [Р.
Вебер, стр. 46—].
Следует отметить, что памятью с DIP-корпусами комплектовались персональные
компьютеры с микропроцессорами i8086/88, i80286 и, частично, i80386SX/DX. Установка и
замена этого вида памяти была нетривиальной задачей. Мало того, что приходилось подбирать
чипы для банков памяти одинаковой разрядности и емкости. Приходилось прилагать усилия и
смекалку, чтобы чипы правильно устанавливались в разъемы. К тому же необходимо было не
разрушить контакты механически, не повредить их инструментом, статическим
электричеством, грязью и т.п. Поэтому уже в компьютерах с процессором i80386DX эти
микросхемы стали заменять памяти SIPP и SIMM.
B.3.1.2. Динамическое ОЗУ.SIPP Динамическое ОЗУ.(SIP) Динамическое ОЗУ.—модули памяти.модули Динамическое ОЗУ.памяти.
Рис. B.3.3. Модуль памяти SIPP
Одной из незаслуженно забытых конструкций модулей памяти являются SIPP-модули. Эти
модули представляют собой маленькие платы с несколькими напаянными микросхемами
DRAM.
SIPP является сокращением слов Single Inline Package. SIPP-модули соединяются с
системной платой с помощью контактных штырьков. Под контактной колодкой находятся 30
маленьких штырьков (смотри рисунок B.3.3.), которые вставляются в соответствующую панель
системной платы ([Вебер,] стр. 49—).
Модули SIPP имели определенные вырезы, которые не позволяли вставить их в разъемы
неправильным образом. По мнению автора, этот вид модулей лидировал по простоте их
установки на системную плату.
B.3.2. Динамическое ОЗУ.SIMM-модули.модули.
Рис. B.3.4. Модуль памяти SIMM (3D0pin)
Аббревиатура SIMM расшифровывается как Single Inline Memory Module (Модуль памяти с
однорядным расположением выводов.) Он включает в себя все то, что для DIP называлось
банком (смотри подраздел B.3.1.1.)
Модули SIMM могут иметь объем 256 Кбайт, 1, 2, 4, 8, 16 и 32 Мбайт. Соединение SIMMмодулей с системной платой осуществляется с помощью колодок (см. рисунок B.3.5.)
Рис. B.3.5. Установка модуля памяти SIMM
Модуль вставляется в пластмассовую колодку под углом 70 градусов, а потом зажимается
пластмассовым держателем. При этом плата встает вертикально. Специальные вырезы на
модуле памяти не позволит поставить их неправильным образом ([Вебер,] стр. 47—.)
Модули SIMM для соединения с системной платой имеют не штырьки, а позолоченные
полоски (так называемые pin, пины).
B.3.2.1. Динамическое ОЗУ.Сравнение Динамическое ОЗУ.SIMM-модули.модулей.
SIMM-модули в своем развитии прошли два этапа. Первыми представителями SIMMмодулей были 30-пиновые SIMM FPM DRAM. Их максимальная частота работы — 29 МГц.
Стандартным же временем доступа к памяти считалось 70 нс. Эти модули уже с трудом
работали на компьютерах с микропроцессорами i80486DX2, и были вытеснены сначала 72пиновыми FPM DRAM, а затем EDO RAM.
Модуль памяти SIMM (72Dpin)
SIMM EDO RAM имеют только 72 пина и могут работать на частоте до 50 МГц. Этими
модулями памяти оснащались компьютеры с процессорами Intel 80486DX2/DX4, Intel Pentium,
Pentium Pro и Pentium MMX, а также AMD 80586 и K5. Эти модули устанавливались на платах
с чипсетом Intel 440TX, 440EX, 440LX, 450NX; VIA Apollo MVP 3/4, Pro/Pro+; ALI Alladin 4/4+/
V/PRO II, ALI Alladin TNT2.
В настоящее время SIMM-модули, как 30-pin, так и 72-pin не удовлетворяют по своим
характеристикам требованиям новых шин и процессоров. Поэтому они все активнее
заменяются модулями DIMM [Евгений Калугин Типы памяти.//”Подводная лодка”, январь 2000
—стр. 166—.]
B.3.2.2. Динамическое ОЗУ.Причины Динамическое ОЗУ.повышения Динамическое ОЗУ.скорости Динамическое ОЗУ.работы Динамическое ОЗУ.EDO Динамическое ОЗУ.RAM.
Не смотря на небольшие конструктивные различия, и FPM, и EDO RAM делаются по одной
и той же технологии, поэтому скорость работы должна быть одна и та же. Действительно, и
FPM, и EDO RAM имеют одинаковое время считывания первой ячейки — 60—70 нс. Однако в
EDO RAM применен метод считывания последовательных ячеек. При обращении к EDO RAM
активизируется не только первая, но и последующие ячейки в цепочке. Поэтому, имея то же
время при обращении к одной ячейке, EDO RAM обращается к следующим ячейкам в цепочке
значительно быстрее. Поскольку обращение к последовательно следующим друг за другом
областям памяти происходит чаще, чем к ее различным участкам (если отсутствует
фрагментация памяти), то выигрыш в суммарной скорости обращения к памяти значителен.
Однако даже для EDO RAM существует предел частоты, на которой она может работать.
Несмотря ни на какие ухищрения, модули SIMM не могут работать на частоте локальной шины
PCI, превышающей 66 МГц. С появлением в 1996 году процессора Intel Pentium II и чипсета
Intel 4 0BX частота локальной шины возросла до 100 МГц, что заставило производителей
динамического ОЗУ перейти на другие технологии, прежде всего DIMM SDRAM.
B.3.3.DIMM
Аббревиатура DIMM расшифровывается как Dual Inline Memory Module (Модуль памяти с двойным
расположением выводов). В модуле DIMM имеется 168 контактов, которые расположены с двух сторон платы и
разделены изолятором. Также изменились и разъемы для DIMM-модулей.
Следует отметить, что разъем DIMM имеют много разновидностей DRAM. К тому же вплоть до последнего
времени модули DIMM не имели средств самоконфигурирования (в отличие от SIMM-модулей). Поэтому для
облегчения выбора нужного модуля пользователям на материнских платах разные типы DIMM имеют от одного до
трех вырезов на модуле памяти. Они предотвращают от неправильного выбора и неправильной установки модулей
памяти.
В следующих подразделах рассмотрим типы DRAM, имеющие разъем DIMM.
B.3.3.1. Динамическое ОЗУ.SDRAM.
Рис. B.3.6. Модуль памяти SDRAM
Аббревиатура SDRAM расшифровывается как Synchronic DRAM (динамическое ОЗУ с синхронным
интерфейсом). Этим они отличаются от FPM и EDO DRAM, работающих по асинхронному интерфейсу.
С асинхронным интерфейсом процессор должен ожидать, пока DRAM закончит выполнение своих внутренних
операций. Они обычно занимают 60 нс. В DRAM с синхронным управлением происходит защелкивание
информации от процессора под управлением системных часов. Триггеры запоминают адреса, сигналы управления
и данных. Это позволяет процессору выполнять другие задачи. После определенного количества циклов данные
становятся доступными, и процессор может их считывать. Таким образом, уменьшается время простоя процессора
во время регенерации памяти.
Другое преимущество синхронного интерфейса —это то, что системные часы задают временные границы,
необходимые DRAM. Это исключает необходимость наличия множества стробирующих импульсов, обязательных
для асинхронного интерфейса. Это, во-первых, уменьшает трафик по локальной шине (нет “лишних” сигналов), а
во-вторых, позволяет упростить операции ввода-вывода (в операциях пересылки центральный процессор либо
контроллер DMA уже не должен выделять полезную информацию среди служебных стробирующих импульсов и
битов четности). В-третьих, все операции ввода/вывода на локальной шине стали управляться одними и теми же
синхроимпульсами, что само по себе хорошо.
Хотя SDRAM появилась уже давно, использование ее тормозилось высокой (на 33%) ценой по сравнению с
EDO RAM. “Звездный час” SDRAM настал в 1997 году, после появления чипсета 440BX, работающего на частоте
100 МГц. Вследствие этого доля рынка SDRAM за год выросла в два раза (с 25% в 1997 году до 50% в 1998 году.)
В настоящее время выпускаются модули SDRAM, работающие на частотах 100 и 133 МГц. Также разработаны
SDRAM на частоты 143 МГц и выше.
B.3.3.2. Динамическое ОЗУ.ESDRAM.
Следующим оригинальным решением, увеличившим частоту работы SDRAM, явилось создание кэша SRAM
на самом модуле динамического ОЗУ. Так появилась спецификация Enhanced SDRAM
(ESDRAM). Это позволило поднять частоту работы модуля до 200 МГц. Назначение кэша на модуле точно
такое же, что и кэш второго уровня процессора — хранение наиболее часто используемых данных.
B.3.3.3. Динамическое ОЗУ.SDRAM Динамическое ОЗУ.II.
Рис. B.3.7. Модуль памяти DDR DRAM (SDRAM II)
Спецификация SDRAM II (или DDR SDRAM) не имеет полной совместимости с SDRAM. Эта спецификация
позволяет увеличить частоту работы SDRAM за счет работы на обеих границах тактового сигнала, то есть на
подъеме и спаде. Однако SDRAM
II использует тот же 168-ми контактный разъем DIMM.
B.3.3.4. Динамическое ОЗУ.SLDRAM.
Как и SDRAM II, эта спецификация использует обе границы тактового сигнала и имеет в себе SRAM. Однако
благодаря протоколу SynchLink Interface эта память способна работать на частоте до 400 МГц.
B.3.3.5. Динамическое ОЗУ.Память Динамическое ОЗУ.от Динамическое ОЗУ.Rambus Динамическое ОЗУ.(RDRAM, Динамическое ОЗУ.RIMM).
Рис. B.3.8. Модуль памяти RDRAM (RIMM)
RDRAM представляет собой спецификацию, созданную и запатентованную фирмой Rambus, Inc. За счет
использования обоих границ сигнала достигается частота работы памяти в 800 МГц.
Подсистема памяти Direct Rambus включает в себя следующие компоненты [Евгений Калугин. Типы
памяти.//”Подводная лодка”, январь 2000 г., стр. 166—.]:
1. Direct Rambus Controller.
2. Direct Rambus Channel.
3. Direct Rambus Connector.
4. Direct Rambus RIMM(tm).
5. Direct Rambus DRAMs.
Рассмотрим эти компоненты поподробнее:
1. Контроллер Direct Rambus — это главная шина подсистемы памяти. Он помещается на чипе логики, как и
PC-чипсет, микропроцессор, графический контроллер. Физически можно поместить до четырех Direct Rambus—
контроллеров на одном чипе логики. Контроллер — это интерфейс между чипом логики и памятью Rambus, и в его
обязанности входит генерация запросов, управление потоком данных, и ряд других функций.
2. Direct Rambus Channel создает электрические соединения между Rambus Controller и чипами Direct RIMM.
Работа канала основана на 30-ти сигналах, составляющих высокоскоростную шину. Эта шина работает на частоте
400 МГц и, за счет передачи данных на обеих границах тактового сигнала, позволяет передавать данные на 800
МГц. Два канала данных (шириной в байт каждый) позволяет получать пиковую пропускную способность в 1,6
Гбайт/с. Канал соответствует форм-фактору SDRAM.
3. Разъем Direct Rambus — это разъем со 168 контактами. Контакты расположены на двух сторонах модуля, по
84 с каждой стороны. Разъем представляет собой низкоиндуктивный интерфейс между каналом на модуле RIMM и
каналом на материнской плате.
4.
Модуль
RIMM
—
это
модуль
памяти,
который
включает
в
себя один или более чипов и организует непрерывность канала. По существу, RIMM образует непрерывный канал
на пути от одного разъема к другому. Поэтому оставлять свободные разъемы недопустимо
Существуют специальные модули только с каналом, называемые continuity modules. Они не содержат чипов
памяти и предназначены для заполнения свободных посадочных мест.
Модули RIMM имеют размеры, сходные с геометрическими размерами SDRAM DIMMs. Модули RIMM
поддерживают SPD, которые используются на DIMM'ах SDRAM. В отличие от SDRAM DIMM, Direct Rambusах SDRAM. В отличие от SDRAM DIMM, Direct Rambus
может содержать любое целое число чипов Direct RDRAM (до максимально возможного).
Один канал Direct Rambus максимум может поддерживать 32 чипа DRDRAM. На материнской плате может
использоваться до трех RIMM модулей. Используются 64 Мбит, 128 Мбит и 256 Мбит устройства.
Чтобы расширить память сверх 32-х устройств, могут использоваться два чипа повторителя. С одним
повторителем канал может поддерживать 64 устройства с 6-ю RIMM модулями, а с двумя — 128 устройств на 12
модулях.
5. Чипы DRDRAM. Чипы DRDRAM составляют часть подсистемы Rambus, запоминающие данные. Все
устройства в системе электрически расположены в канале между контроллером и терминатором. Устройства Direct
Rambus могут только отвечать на запросы контроллера, который делает их шину подчиненной или отвечающей.
Устройства включают в себя статическое и динамическое ОЗУ.
Запоминающие устройства типа ROM(M), PROM, EPROM, EEPROM
Запоминающие устройства типа ROM (память только для чтения) хранит информацию,
которая либо вообще не изменяется (в ЗУ типов ROM(M) и PROM), либо изменяется редко и не
в оперативном режиме (в ЗУ типов EPROM и EEPROM).
В масочные ЗУ типа ROM(M) информация записывается при изготовлении микросхем на
промышленных предприятиях с помощью шаблона (маски) на завершающем этапе
технологического процесса.
ЗУ типа PROM программируются после изготовления их предприятием электронной
промышленности в лабораториях потребителей без использования сложных технологических
процессов. Для этого используются несложные устройства (программаторы).
Программирование постоянной памяти заключается в том или ином размещении элементов
связи между горизонтальными и вертикальными линиями матрицы запоминающих элементов.
Запоминающие устройства типа ROM имеют многоразрядную организацию (чаще всего 8разрядную или 4-разрядную, для некоторых ИС 16-разрядную) и обычно выполняются по
структуре 2DM. Простейшие ЗУ могут иметь структуру 2D. Технологии изготовления
постоянных ЗУ разнообразны - ТТЛ(Ш), КМОП. n-МОП и др.
Масочные ЗУ
Элементом связи в масочных ЗУ могут быть диоды, биполярные транзисторы. МОПтранзисторы и т. д.
В матрице диодного ROM(M) (рис. 4.12, а) горизонтальные линии являются линиями
выборки слов, а вертикальные — линиями считывания. Считываемое слово определяется
расположением диодов в узлах координатной сетки. При наличии диода высокий потенциал
выбранной горизонтальной линии передается на соответствующую вертикальную линию, и в
данном разряде слова появляется сигнал логической единицы. При отсутствии диода потенциал
близок к нулевому, т. к. вертикальная линия через резистор связана с землей. В изображенной
матрице при возбуждении линии выборки Ш1 считывается слово 11010001 (в ячейке номер
один хранится это слово). При возбуждении Ш2 считывается слово 10101011 (оно хранится в
ячейке номер 2). Шины выборки являются выходами дешифратора адреса, каждая адресная
комбинация возбуждает свой выход дешифратора, что приводит к считыванию слова из
адресуемой ячейки.
В матрице с диодными элементами в одних узлах матрицы диоды изготовляются, в других
— нет. При этом, чтобы удешевить производство, при изготовлении ЗУ стремятся варьировать
только один шаблон, так чтобы одни элементы связи были законченными и работоспособными,
а другие - не завершенными и как бы отсутствующими. Для матриц с МОП - тpaнзисторами
часто в МОП-транзисторах, соответствующих хранению нуля, увеличивают толщину
подзатворного окисла, что ведет к увеличению порогового напряжения транзистора. В этом
случае рабочие напряжения ЗУ не в состоянии открыть транзистор. Постоянно закрытое
состояние транзистора аналогично его отсутствию Матрица с МОП-транзисторами показана на
рис. 4.12, б.
ЗУ с масочным программированием отличаются компактностью запоминающих элементов
и, следовательно, высоким уровнем интеграции. При больших объемах производства масочное
программирование предпочтительно, однако при недостаточной тиражности ЗУ затраты на
проектирование и изготовление шаблона для технологического программирования ЗУ окажутся
чрезмерно высокими. Отсюда видна и область применения масочных ЗУ — хранение
стандартной информации, имеющей широкий круг потребителей. В частности, масочные ЗУ
имеют в качестве "прошивки" коды букв алфавитов (русского и латинского), таблицы типовых
функций (синуса, квадратичной функции и др.), стандартное программное обеспечение и т. п.
ЗУ типа PROM
В ЗУ типа PROM микросхемы программируются устранением или созданием специальных
перемычек. В исходной заготовке имеются (или отсутствуют) все перемычки. После
программирования остаются или возникают только необходимые.
Устранение части перемычек свойственно ЗУ с плавкими перемычками (типа fuse —
предохранитель). При этом в исходном состоянии ЗУ имеет все перемычки, а при
программировании часть их ликвидируется путем расплавления импульсами тока достаточно
большой амплитуды и длительности.
В ЗУ с плавкими перемычками эти перемычки включаются в элем роды диодов или
транзисторов. Перемычки могут быть металлическими (вначале изготовлялись из нихрома,
позднее из титановольфрамовых и других сплавов) или поликристаллическими (кремниевыми).
В исходном состоянии запоминающий элемент хранит логическую единицу, логический нуль
нужно записать, расплавляя перемычку.
Создание части перемычек соответствует схемам, которые в исходном состоянии имеют
непроводящие перемычки в виде пары встречно включенных диодов или тонких
диэлектрических слоев, пробиваемых при программировании с образованием низкоомных
сопротивлений. Схемы с тонкими пробиваемыми диэлектрическими перемычками (типа
antifuse) наиболее компактны и совершенны. Их применение характерно для программируемых
логических СБИС. В номенклатуре продукции стран СНГ ЗУ с перемычками типа antifuse
отсутствуют.
Второй тип запоминающего элемента PROM — два встречно включенных диода. В
исходном состоянии сопротивление такой цепочки настолько велико, что практически
равноценно разомкнутой цепи, и запоминающий элемент хранит логический нуль. Для записи
единицы к диодам прикладывают повышенное напряжение, пробивающее диод, смещенный в
обратном направлении. Диод пробивается с образованием в нем короткого замыкании и играет
роль появившейся проводящей перемычки.
Запоминающие элементы с плавкими перемычками и парами диодов показаны на рис. 4.13,
о, б в исходном состоянии и после программировании.
Матрица запоминающих элементов ЗУ с плавкими перемычками в технике ТТЛ
(микросхемы К155РЕЗ) показана на рис. 4.14. ЗУ имеет организацию 32x8. Матрица содержит
32 транзистора с 9 эмиттерами в каждом (8 рабочих и один технологический для уточнения
режима прожигания, технологический эмиттер на рисунке не показан). Высокий потенциал на
какой-либо шине выборки активизирует соответствующий транзистор, работающий в режиме
эмиттерного повторителя. До программирования транзисторы передают высокий потенциал
базы на все выходные (разрядные) линии, т. е. по всем адресам записаны слова, состоящие из
одних единиц. Пережигание перемычки в цепи какого-либо эмиттера дает ноль в данном
разряде слова, например, для ячейки с номером 1 показан вариант программирования для
хранения по этому адресу слова 10100101. Выходы матрицы связаны с внешними цепями через
буферные каскады, имеющие выходы типа ОК. или ТС. ЗУ имеет структуру 2D.
Программирование ЗУ с плавкими перемычками реализуется простыми аппаратными
средствами и может быть доступно схемотехникам даже при отсутствии специального
оборудования. На рис. 4.15 показан многоэмиттерный транзистор (МЭТ) с плавкими
перемычками и дополнительными элементами, обеспечивающими программирование ЗУ.
Выходы этого запоминающего элемента передаются во внешние цепи через буферные каскады
с тремя состояниями, работа которых разрешается сигналом ОЕ. При этом сигнал разрешения
работы формирователей импульсов программирования OE отсутствует, и они не влияют на
работу схемы. При программировании буферы данных переводятся в третье состояние (ОЕ = 0),
а работа формирователей F разрешается. Слово, которое нужно записать в данной ячейке,
подается на линии данных D7...D0. Те разряды слова, в которых имеются единицы, будут иметь
на выходах формирователей низкий уровень напряжения. Соответствующие эмиттеры МЭТ
окажутся под низким напряжением и через них пройдет ток прожигания перемычки. При
чтении отсутствие перемычки даст нулевой сигнал на вход буфера данных. Так как буфер
инвертирующий, с его выхода снимется единичный сигнал, т. е. тот, который и записывался.
Адресация программируемой ячейки как обычно обеспечивается дешифратором адреса,
подающим высокий уровень потенциала на базу адресуемого МЭТ.
Для прожигания перемычек на них подают токи в десятки миллиампер в виде серии
импульсов (для большей надежности прожигания). Не все перемычки удается пережечь
надлежащим образом, коэффициент программируемости для серии К556, например, составляет
0,5...0,7. В ЗУ с плавкими перемычками возможно восстановление проводимости перемычек
через некоторое время из-за миграции в электроматериалах.
Плавкие перемычки занимают на кристалле относительно много места, поэтому уровень
интеграции ЗУ с такими перемычками существенно ниже, чем у масочных ЗУ. В то же время
простота программирования пользователем и невысокая стоимость в свое время обусловили
широкое распространение ЗУ типа PROM. Невысокая стоимость программируемых пользователем ЗУ объясняется тем, что изготовитель выпускает микросхемы без учета конкретного
содержимого ЗУ, т. е. освобожден от проектирования по специализированным заказам и.
следовательно, связанных с этим затрат.
Среди отечественных PROM ведущее место занимают микросхемы серии К556, имеющие
информационную емкость 1...64 Кбит и время доступа па адресу 70...90 нс.
Внешняя организация памяти типов ROM(M) и PROM проста: входными сигналами для них
служат адресный код и сигнал выбора микросхемы CS. Во времени последовательность
сигналов следующая: вначале подается адресным код (чтобы произошла дешифрация адреса и
было исключено обращение к непредусмотренной ячейке), затем поступает сигнал выбора
микросхемы CS и после задержки, определяемой быстродействием схемы, на выходах данный
устанавливаются правильные значения считываемых сигналов.
ЗУ типов EPROM и EEPROM
В ре программируемых ЗУ типов EPROM и EEPROM (или E2PROM) в можно стирание
старой информации и замена ее новой в результате специального процесса, для проведения
которого ЗУ выводится из рабочего режима. Рабочий режим (чтение данных) — процесс,
выполняемый с относительно высокой скоростью. Замена же содержимого памяти требует
выполнения гораздо более длительных операций.
По способу стирания старой информации различают ЗУ со стиранием ультрафиолетовыми
лучами (EPROM или в русской терминологии РПЗУ-УФ, т. е. репрограммируемые ПЗУ с
ультрафиолетовым стиранием) и электрическим стиранием (E2PROM или РПЗУ-ЭС).
Запоминающими элементами современных РПЗУ являются транзисторы типов МНОП и
ЛИЗМОП (добавление ЛИЗ к обозначению МОП происходит от слов Лавинная Инжекция
Заряда).
МНОП-транзистор отличается от обычного МОП-транзистора двухслойным подзатворным
диэлектриком. На поверхности кристалла расположен тонкий слой двуокиси кремния Si02,
далее более толстый слой нитрида кремния Si3N4 и затем уже затвор (рис. 4.16, о). На границе
диэлектрических слоев возникают центры захвата заряда. Благодаря туннельному эффекту,
носители заряда могут проходить через тонкую пленку окисла толщиной не более 5 мкм и
скапливаться на границе раздела слоев. Этот заряд и является носителем информации,
хранимой МНОП-транзистором. Заряд записывают созданием под затвором напряженности
электрического поля, достаточной для возникновения туннельного перехода носителей заряда
через тонкий слой Si02 На границе раздела диэлектрических слоев можно создавать заряд
любого знака в зависимости от направленности электрического поля в подзатворной области
Наличие заряда влияет на пороговое напряжение транзистора.
Для МНОП-транзистора с n-каналом отрицательный заряд на дранице развела слоев
повышает пороговое напряжение (экранирует воздействие положительного напряжения на
затворе, отпирающего транзистор). При этом пороговое напряжение возрастает настолько, что
рабочие напряжения на затворе транзистора не в состоянии его открыть (создать в нем
проводящий канал). Транзистор, в котором заряд отсутствует или имеет другой знак, легко
открывается рабочим значением напряжения. Так осуществляется хранение бита в МНОП: одно
из состояний трактуется как отображение логической единицы, другое — нуля.
При программировании ЗУ используются относительно высокие напряжения, около 20 В.
После снятия высоких напряжений туннельное прохождение носителей заряда через
диэлектрик прекращается и заданное транзистору пороговое напряжение остается неизменным.
После 104...106 перезаписей МНОП-транзистор перестает устойчиво хранить заряд. РПЗУ на
МНОП-транзисторах энергонезависимы и могут хранить информацию месяцами, годами и
десятками лет.
Перед новой записью старая информация стирается записью нулей во все запоминающие
элементы. Тип ЗУ — РПЗУ-ЭС.
Транзисторы типа ЛИЗМОП всегда имеют так называемый плавающий затвор, который
может быть единственным или вторым, дополнительным к обычному (управляющему) затвору.
Транзисторы с одним плавающим затвором используются в ЗУ типа РПЗУ-УФ, а транзисторы с
двойным затвором пригодны для применения как в РПЗУ-УФ, так и в РПЗУ-ЭС. Рассмотрим
более современный тип — ЛИЗМОП-транзистор с двойным затвором (рис. 4.16, 6).
Принцип работы ЛИЗМОП с двойным затвором близок к принципу работы МНОПтранзистора — здесь также между управляющим затвором и областью канала помещается
область, в которую при программировании можно вводить заряд, влияющий на величину
порогового напряжения транзистора. Только область введения заряда представляет собою не
границу раздела слоев диэлектрика, а окруженную со всех сторон диэлектриком проводящую
область (обычно из поликристаллического кремния), в которую, как в ловушку, можно ввести
заряд, способный сохраняться в ней в течение очень длительного времени. Эта область и
называется плавающим затвором.
При подаче на управляющий затвор, исток и сток импульса положительного напряжения
относительно большой амплитуды 20...25 В в обратно смещенных р-n переходах возникает
лавинный пробой, область которого насыщается электронами. Часть электронов, имеющих
энергию, достаточную для преодоления потенциального барьера диэлектрической области,
проникает в плавающий затвор. Снятие высокого программирующего напряжения восстанавливает обычное состояние областей транзистора и запирает электроны в плавающем
затворе, где они могут находиться длительное время (в высококачественных приборах многие
годы).
Заряженный электронами плавающий затвор увеличивает пороговое напряжение
транзистора настолько, что в диапазоне рабочих напряжений проводящий канал в транзисторе
не создается.
При отсутствии заряда в плавающем затворе транзистор работает в обычном ключевом
режиме.
Стирание информации может производиться двумя способами — ультрафиолетовым
облучением или электрическими сигналами. В первом случае корпус ИС имеет специальное
прозрачное окошко для облучения кристалла. Двуокись кремния и поликремний прозрачны для
ультрафиолетовых лучей. Эти лучи вызывают в областях транзистора фототоки и тепловые
токи, что делает области прибора проводящими и позволяет заряду покинуть плавающий
затвор. Операция стирания информации этим способом занимает десятки минут, информация
стирается сразу во всем кристалле. В схемах с УФ-стиранием число циклов
перепрограммирования существенно ограничено, т. к. под действием ультрафиолетовых лучей
свойства материалов постепенно изменяются. Число циклов перезаписи у отечественных ИС
равно 10...100.
Электрическое стирание информации осуществляется подачей на управляющие затворы
низкого (нулевого) напряжения, а на стоки — высокого напряжения программирования.
Электрическое стирание имеет преимущества: можно стирать информацию не со всего
кристалла, а выборочно (индивидуально для каждого адреса). Длительность процесса
"стирание-запись" значительно меньше, сильно ослабляются ограничения на число циклов
перепрограммирования (допускается 104...106 таких циклов). Кроме того, перепрограммировать
ЗУ можно, не извлекая микросхему из устройства, в котором она работает. В то же время схемы
с электрическим стиранием занимают больше места на кристалле, в связи с чем уровень их
интеграции меньше, а стоимость выше. В последнее время эти недостатки быстро
преодолеваются и ЭС-стирание вытесняет УФ-стирание.
Предшественниками даухзатворных ЛИЗМОП-транзисторов были однозатворные, имевшие
только плавающий затвор. Эти транзисторы изготовлялись обычно с р-каналом, поэтому
введение электронов в плаваюший затвор приводило к созданию в транзисторе проводящего
канала, а удаление заряда — к исчезновению такого канала. При использовании таких
транзисторов запоминающие элементы состоят из двух последовательно включенных
транзисторов: ключевого МОП-транзистора обычного типа для выборки адресованного элемента и ЛИЗМОП-транзистора, состояние которого определяет хранимый бит. Стирание
информации производится ультрафиолетовыми лучами.
Подключение двухзатворных ЛИЗМОП-транзисторов к линиям выборки строк и линиям
чтения в матрицах ЗУ показано на рис. 4.17. Запись логического нуля осуществляется путем
заряда плавающего затвора инжекцией "горячих" электронов в режиме программирования.
Стирание информации, под которым понимается удаление заряда из плавающего затвора,
приводит к записи во все запоминающие элементы логических единиц, т. к. в данном случае
опрашиваемые транзисторы открываются и передают напряжение Ucc на линии считывания.
Среди отечественных РПЗУ-УФ (в маркировке они имеют буквы РФ) наиболее известна
серия К573 с широким набором типономиналов, а среди РПЗУ-ЭС (в маркировке имеют буквы
РР) имеются серии КР558 (на основе n-МНОП), К1609, К1624, К1626 на ЛИЗМОП с двумя
затворами.
Отечественные ROM характеризуются в настоящее время следующими параметрами:
масочные ИС имеют информационную емкость до 1 Мбит а при временах доступа около 200
нс, микросхемы с плавкими перемычками соответственно 64 Кбита и 80 нс, РПЗУ-УФ 1 Мбит и
350 нс, РПЗУ-ЭС 64 Кбита и 250 нс.
На уровне мировой техники имеются ЗУ типа РПЗУ-УФ с информационной емкостью до 8
Мбит при временах доступа 45 нс (фирма Atmel), ЗУ типа РПЗУ-ЭС с информационной
емкостью до 256 Кбит при временах доступа 90 нс и допустимом числе циклов перезаписи 10 5 с
временем сохранения данных более 10 лет Это ЗУ использует один источник питания 5 В и
потребляет] ток 2 мА в активном режиме и 100 мкА при отсутствии обращений. Возможна
байтовая или страничная запись за время 3 мс (фирма SGS-Thomson).
Импульсное питание ROM
Энергонезависимость всех ROM, сохраняющих информацию при отключении питания,
открывает возможности экономии питания при их эксплуатации и соответственно, улучшения
их теплового режима, что повышает надежность схем. Питание можно подавать только на ИС,
к которой в данный момент происходит обращение. На рис. 4.18 показан обычный вариант
построения модуля памяти, состоящего из нескольких ИС, и вариант с импульсным питанием.
В обычном варианте напряжение Ucc подключается ко всем ИС постоянно, а выбор адресуемой
ИС осуществляется сигналом CS. В варианте с импульсным питанием работа всех ИС по
входам CS постоянно разрешена, но питание подключается только к выбранной микросхеме с
помощью ключа, управляемого от выходов адресного дешифратора, декодирующего старшие
разряды адреса.
Режим импульсного питания может многократно уменьшить потребляемую модулем
мощность, но, одновременно, увеличивает время обращения к ЗУ при одиночных произвольных
обращениях, т. к. после включения питания необходимо время для установления режима ИС.
При чтении данных, расположенных по близким адресам, когда старшие разряды адреса
остаются неизменными, потерь времени не возникает.
§4.4. Флэш-память
Флэш-память (Flash-Memory) по типу запоминающих элементов и основным принципам
работы подобна памяти типа E2PROM> однако ряд архитектурных и структурных особенностей
позволяют выделить ее в отдельный класс. Разработка Флэш-памяти считается кульминацией
десятилетнего развития схемотехники памяти с электрическим стиранием информации.
В схемах Флэш-памяти не предусмотрено стирание отдельных слов, стирание информации
осуществляется либо для всей памяти одновременно, либо для достаточно больших блоков.
Понятно, что это позволяет упростить схемы ЗУ, т. е. способствует достижению высокого
уровня интеграции и быстродействия при снижении стоимости. Технологически схемы Флэшпамяти выполняются с высоким качеством и обладают очень хорошими параметрами.
Термин Flash по одной из версий связан с характерной особенностью этого вида памяти —
возможностью одновременного стирания всего ее объема Согласно этой версии ещё до
появления Флэш-памяти при хранении секретных данных использовались устройства, которые
при попытках несанкционированного доступа к ним автоматически стирали хранимую
информацию и назывались устройствами типа Flash (вспышка, мгновение). Это название
перешло и к памяти, обладавшей свойством быстрого стирания всего массива данных одним
сигналом.
Одновременное стирание всей информации ЗУ реализуется наиболее просто, но имеет тот
недостаток, что даже замена одного слова в ЗУ требует стирания и новой записи для всего ЗУ в
целом. Для многих применений это неудобно. Поэтому наряду со схемами с одновременным
стиранием всего содержимого имеются схемы с блочной структурой, в которых весь массив
памяти делится на блоки, стираемые независимо друг от друга. Объем таких блоков сильно
разнится: от 256 байт до 128 Кбайт.
Число циклов репрограммирования для Флэш-памяти хотя и велико, но ограничено, т. е.
ячейки при перезаписи "изнашиваются". Чтобы увеличить долговечность памяти, в ее работе
используются специальные алгоритмы, способствующие "разравниванию" числа перезаписей
по всем блокам микросхемы .
Соответственно областям применения Флэш-память имеет архитектурные и
схемотехнические
разновидности. Двумя основными направлениями
эффективного
использования Флэш-памяти являются хранение не очень часто изменяемых данных
(обновляемых программ, в частности) и замена памяти на магнитных дисках.
Для первого направления в связи с редким обновлением содержимого параметры циклов
стирания и записи не столь существенны как информационная емкость и скорость считывания
информации. Стирание в этих схемах может быть как одновременным для всей памяти, так и
блочным. Среди устройств с блочным стиранием выделяют схемы со специализированными
блоками (несимметричные блочные структуры). По имени так называемых Boot-блоков, в
которых информация надежно защищена аппаратными средствами от случайного стирания, эти
ЗУ называют Boot Block Flash Memory. Boot-блоки хранят программы инициализации системы,
позволяющие ввести ее в рабочее состояние после включения питания.
Микросхемы для замены жестких магнитных дисков {Flash-File Memory) содержат более
развитые средства перезаписи информации и имеют идентичные блоки (симметричные
блочные структуры).
Одним из элементов структуры Флэш-памяти является накопитель (матрица запоминающих
элементов). В схемотехнике накопителей развиваются два направления: на основе ячеек типа
ИЛИ-НЕ (NOR) и на основе ячеек типа И-НЕ (NAND).
Накопители на основе ячеек ИЛИ-НЕ (с параллельным включением ЛИЗ-МОПтранзисторов с двойным затвором) обеспечивают быстрый доступ при произвольной выборке.
Они приемлемы для разных применений, но наиболее бесспорным считается их применение в
памяти для хранении редко обновляемых данных. При этом возникает полезная
преемственность с применявшимися ранее ROM и EPROM, сохраняются типичные сигналы
управления, обеспечивающие чтение с произвольной выборкой, структура матрицы накопителя
показана на рис. 4.19. Каждый столбец представляет собою совокупность параллельно
соединенных транзисторов. Разрядные линии выборки находятся под высоким потенциалом.
Все транзисторы невыбранных строк заперты. В выбранной строке открываются и передают
высокий уровень напряжения на разрядные линии считывания тс транзисторы, в плавающих
затворах которых отсутствует заряд электронов. и, следовательно, пороговое напряжение
транзистора имеет нормальное (не повышенное) значение.
Накопители на основе ячеек ИЛИ-НЕ широко используются фирмой Intel. Имеются мнения
о конкурентоспособности этих накопителей и в применениях, связанных с заменой жестких
магнитных дисков Флэш-памятью. Структуры с ячейками И-НЕ более компактны, но не
обеспечивают режима произвольного доступа и практически используются только в схемах
замены магнитных дисков. В схемах на этих ячейках сам накопитель компактнее, но
увеличивается количество логических элементов обрамления накопителя. Для улучшения
технико-экономических характеристик в схемах Флэш-памяти применяются различные
средства и приемы:
1. Прерывание процессов записи при обращениях процессора для чтения (Erase Suspend).
Без этого возникали бы длительные простои процессора, т. к. запись занимает достаточно
большое время. После прерывания процесс записи возобновляется под управлением
внутренних средств Флеш-памяти.
2. Внутренняя очередь команд, управляющих работой Флэш-памяти, которая позволяет
организовать конвейеризацию выполняемых операций и ускорить процессы чтения и записи.
3. Программирование длины хранимых в ЗУ слов для согласования с различными портами
ввода/вывода.
4. Введение режимов пониженной мощности на время, когда к ЗУ нет обращений, в том
числе режима глубокого покоя, в котором мощность снижается до крайне малых значений
(например, ток потребления снижается до 2 мкА). Эти особенности очень важны для устройств
с автономным (батарейным) питанием.
5. Приспособленность к работе при различных питающих напряжениях (5 В; 3,3 В и др.).
Сама схема "чувствует" уровень питания и производит необходимые переключения для
приспособления к нему.
6. Введение в структуры памяти страничных буферов для быстрого накопления новых
данных, подлежащих записи. Два таких буфера могут работать в режиме, называемом "пингпонг", когда один из них принимает слова, подлежащие записи, а другой в это время
обеспечивает запись своего содержимого в память. Когда первый буфер заполнится, второй
уже освободится, и они поменяются местами.
7. Различные меры защиты от случайного или несанкционированного доступа.
Флэш-память с адресным доступом, ориентированная на хранение не слишком часто
изменяемой информации, может иметь одновременное стирание
всей
информации
(архитектура
Bulk
Erase)
или
блочное
стирание (архитектура Boot Block FlashMemory).
Имея преемственность с ЗУ типов E2PROM и EPROM, разработанными ранее, схемы Флэшпамяти предпочтительнее E2PROM по информационной емкости и стоимости в применениях,
где не требуется индивидуальное стирание слов, а в сравнении с EPROM обладают тем
преимуществом, что не требуют специальных условий и аппаратуры для стирания данных,
которое к тому же происходит гораздо быстрее.
Память типа Bulk Erase
Память типа Bulk Erase фирмы Intel, наиболее известной среди разработчи ков Флэшпамяти, имеет время записи байта около 10 мкс, допускает до 10 5 циклов стирания, напряжение
программирования для нее составляет 12 В ± 5%, ток активного режима около 10 мА, в режиме
покоя около 50 мкА. Время доступа при чтении равно приблизительно 100 не, время стирания и
время программирования всего кристалла составляет 0,6...4 с для кристаллов емкостью 256
Кбит...2 Мбит.
В отличие от традиционного управления схемами памяти с помощью адресных и
управляющих сигналов, Флэш-память имеет дополнительное управление словами-командами,
записываемыми процессором в специальный pегистр, функционирующий только при высоком
уровне
напряжения
на
выводе
микросхемы,
обозначаемом
Upp
(напряжении
программирования). При отсутствии такого уровня Upp схема работает только как память для
чтения под управлением традиционных сигналов, задающих операции чтения. снижении
мощности, управления третьим состоянием и выдачи идентификатора.
На рис. 4.20 показана структура Флэш-памяти типа Bulk Erase (схемы 28F010. 28F020
фирмы Intel и др).
Входы А являются адресными, причем в течение цикла записи адреса фиксируются в
регистре-защелке по сигналу строба STB. Ввод/вывод данных (линии DQ) осуществляется
через буферы с третьим состоянием. В течение цикла записи данные фиксируются в регистрезащелке
Сигналы СЕ, ОЕ и WE L-активны. Сигнал СЕ активизирует управляющую логику, буферы
ввода/вывода данных, дешифраторы адреса DCY, DCX И усилители чтения. При высоком
уровне сигнала СЁ (схема не выбрана) буферы входят в третье состояние, а потребление
мощности снижается до уровня покоя (Standby). Сигнал ОЁ низким уровнем разрешает вывод
данных через буферы в течение циклов чтения (естественно, только при низком уровне сигнала
СЕ). к Сигнал WE разрешает запись в регистр команд и матрицу запоминающих ячеек и своими
фронтами загружает регистры-защелки (отрицательным — регистр-защелку адреса,
положительным —данных).
Схемы управления и содержимое регистра команд определяют состояние переключателей
уровней напряжения U используемых в разных режимах работы (при стирании,
программировании или чтении).
Для получения выходных данных при чтении требуется активное состояние сигналов СЕ и
ОЕ. При этом низкий уровень U делает возможным чтение только данных памяти, а высокий
позволяет считывать также коды идентификаторов и информацию для проверки операций
стирания/программирования. Операции с идентификатором выводят код фирмы-изготовителя и
микросхемы. Эти сведения позволяют согласовать алгоритмы стирания и программирования
схемы и программирующего оборудования, что производится автоматически
Коды идентификаторов находятся в двух ячейках памяти и могут считываться с помощью
определенной комбинации сигналов или регистре команд (чтением после подачи в регистр
команды 90Н).
При выполнении операций записи коды адресов и данных фиксируются во внутренних
регистрах-защелках. При высоком уровне U выполняются те же операции и дополнительно
разрешается стирание и программирование памяти Все действия, связанные с изменением
содержимого памяти, производятся с использованием регистра команд. Регистр команд не
занимает какой-либо позиции в адресном пространстве и загружается обычным циклом записи
от процессора при низком уровне Upp Его содержимое играет роль входной информации для
внутреннего автомата управления схемами стирания и программирования памяти
Используются 7 команд, две из которых задают операции чтения данных и кодов
идентификатора), две другие относятся к операции стирания (подготовка стирания/стирание и
проверка стирания), две команды относятся к операции программирования (подготовка
программирования/программирование и проверка программирования) и одна команда задает
операцию сброса микросхемы.
При снижении уровня Upp регистр команд сбрасывается, разрешая микросхеме только
операции чтения.
По команде стирания стираются все байты матрицы параллельно, после чего все они
должны быть проверены. Для этого байты адресуются и активизируются подачей специального
напряжения. Чтение из ячейки кода OFFH показывает, что все биты байта стерты. Если
считывается иной код, выполняется повторная операция стирания. Затем проверка
возобновляется с адреса последнего проверенного байта. Процесс проверки продолжается до
достижения последнего адреса.
Программирование памяти ведется байт за байтом (последовательно или при произвольном
доступе). Цикл чтения от процессора выводит данные байта, которые сравниваются с
заданными. Равенство байтов свидетельствует об успешном программировании. После этого
процесс программирования переходит к следующему байту.
Команда сброса является средством надежного устранения действия команд
стирания/программирования. После каждой из этих команд в регистр команд можно записать
код операции сброса, что устранит возможность каких-либо действий, связанных с указанными
командами. Содержимое памяти не сможет изменяться. Для дальнейшего приведения схемы в
желаемое состояние в регистр команд нужно записать соответствующую команду.
При переходе сигнала СЕ к высокому уровню вводится режим пониженной мощности. Если
это происходит при стирании, программировании или проверках данных, то активный ток
сохраняется до завершения указанных операций.
Флэш-память с несимметричной блочной структурой
Схемам типа Boot Block Flash Memory (Boot-блок Флэш-память, сокращенно ББФП)
присуще блочное стирание данных и несимметричная блочная архитектура. Блоки
специализированы и имеют разные размеры. Среди них имеется так называемый Boot-блок
(ББ), содержимое которого аппаратно защищено от случайного стирания. В ББ хранится
программное обеспечение базовой системы ввода/вывода микропроцессорной системы BIOS
(Basic Input/Output System), необходимое для правильной эксплуатации и инициализации
системы.
В составе блоков имеются также БП (блоки параметров) и ГБ (главные блоки), не
снабженные аппаратными средствами защиты от непредусмотренной записи Блоки БП хранят
относительно часто меняемые параметры системы (коды идентификаторов, диагностические
программы и т. п.). Блоки ГБ хранят основные управляющие программы и т. п.
Микросхемы ББФП предназначены для работы с разными микропроцессорами и для
соответствия им имеют два варианта расположения ББ и адресном пространстве:, вверху и
внизу, что отображается в маркировке ИС буквами Т (Тор) или В (Boilom). На рис. 4.21, а для
примера приведена карта памяти (распределение адресного пространства) для ИС емкостью 4
Мбит с верхним расположением ББ.
В настоящее время выпускаются ББФП с емкостями 1... 16 Мбит, в последующих
поколениях ожидаются ИС с информационными емкостями до 256 Мбит.
По своему функционированию ББФП близки к памяти типа Bulk Erase, в обоих типах ИС
операции стирания/программирования ведутся под управлением
внутреннего
автомата,
входной информацией для которого служат команды, вводимые от процессора. В схемах
ББФП эту роль играет так называемый командный интерфейс пользователя CUI (Command User
lnterface).
Внешняя организация типичной ББФП показана на рис. 4.21, 6 на примере ИС с
информационной емкостью 4 Мбита. Адреса задаются 19-разрядным кодом A18-0, т. е. в
памяти хранится до 512 Кслов. Сигнал BYTE задает 8-разрядную или 16-разрядную
организацию памяти. При байтовой организации байты передаются по линиям DQ7-o, а линия
DQ15 играет роль самого младшего разряда адреса, определяющего, какой байт данной ячейки
передается (старший или младший). При словарной организации выводы DQ15-0 являются
линиями ввода-вывода данных.
Напряжение на выводе RP (Reset/Power Down) может иметь три уровня: 12 В ± 5%, уровень
логической единицы Н и низкий уровень L. При напряжении 12 В ± 5% ББ открыт и в нем
могут выполняться операции стирания и программирования. При напряжении ниже 6,5 В ББ
заперт.
Имея ряд режимов экономии мощности, схемы ББФП, в частности, реализуют режим APS
(Automatic Power Saving), благодаря которому после завершения цикла чтения схема
автоматически входит в статический режим с , потреблением тока около 1 мА, в котором
находится до начала следующего цикла чтения.
Когда схема не выбрана (при высоком уровне сигнала на выводе СЕ и выводе RP, т. е. СЕ =
RP = Н) потребление мощности снижается до уровня покоя (десятки мкА). При RP = L не
только запрещается запись, но и вводится режим глубокого снижения мощности, в котором ток
потребления снижается до долей мкА.
Активному режиму соответствует комбинация сигналов СЕ = L и RP = Н.
Сигналы ОЕ и WE имеют обычное назначение. Микросхемы Boot-блок флэш-памяти могут
работать с разными напряжениями питания и программирования (технология Smart Voltage),
имеют времена доступа при чтении 50...7О нс, токи активных режимов 15...25 мА и крайне
малые токи в режиме глубокого понижения мощности (около 0,2 мкА).
Файловая Флэш-память
Важное место в иерархии ЗУ занимает файловая Флэш-память (ФФП). В течение многих лет
хранение больших объемов данных возлагалось в микроЭВМ на хорошо отработанные и
сравнительно недорогие внешние ЗУ на магнитных, а впоследствии и оптических дисках. Во
многих компьютерах система памяти организована как сочетание жесткого магнитного диска
винчестера) с динамическим полупроводниковым ОЗУ. Инея значительные достоинства,
дисковые ЗУ как электромеханические устройства не свободны от ряда недостатков:
чувствительности к ударам и вибрациям, загрязнениям, ограниченного быстродействия и
значительного потребления мощности. Эти недостатки особенно сказываются в портативных
устройствах с автономным (батарейным) питанием. Достаточно отметить, что дисководы
потребляют в лучшем случае мощность около 3 Bт, что в системах с напряжениями питания
3,3...5 В означает потребление токов 0,6...0,9 А, быстро истощающих батарейки.
Файловая Флэш-память ориентирована на замену твердых дисков, которая в сотни раз
сокращает потребляемую мощность, в той же мере увеличивает механическую прочность и
надежность ЗУ, уменьшает их размеры и вес, на несколько порядков повышает быстродействие
при чтении данных, сохраняя при этом программную совместимость со средствами управления
памятью. Вместе с тем, за дисковой памятью остаются преимущества по информационной
емкости и стоимости.
Использование ФФП для замены дисковой памяти в портативных компьютерах — один из
важнейших факторов, способствующих развитию этого направления. При этом традиционное
сочетание "жесткий диск— динамическое ОЗУ" может заменяться сочетанием "Флэш-память
— статическое ОЗУ". Команды программы, хранимые в ФФП, читаются в этом случае непосредственно процессором, результаты тоже записываются прямо в ФФП а операции с
интенсивными вычислениями, требующие быстрейшего доступа к памяти и записи данных с
байтовой разрешающей способностью, выполняются с использованием быстродействующей
статической памяти. Накопитель ФФП делится на блоки, которые служат аналогами секторов
магнитных дисков, отражаемых в операционной системе MS-DOS Разработаны программные
средства, которые обеспечивают обмен между Флэш-блоками, подобно тому как операционная
система MS-DOS обеспечивает обмен между секторами диска.
Блоки ФФП идентичны и имеют одинаковую информационную емкость (симметричная
блочная архитектура). Так как в ФФП операции записи производятся значительно чаще, чем в
других разновидностях Флэш-памяти, этим операциям уделяется большое внимание —
вводятся страничные буферы, позволяющие с высокой скоростью накапливать некоторый
объем данных, подлежащих записи, для их последующей передачи в накопитель с меньшей
скоростью.
Микросхемы ФФП фирмы Intel имеют информационную емкость I 4...32 Мбит
при временах доступа 70... 150 не, напряжения питания 5; 3,3 I или даже 2,7 В. Они имеют
байтовую или управляемую разрядность (8 или 16), напряжение программирования у них
также, как правило, многовариантно(3,3;5; 12 В).
Внешняя организация ФФП показана на рис. 4.21, в, на примере микросхемы с
информационной емкостью 16 Мбит (ИС типа 28F016SA фирмы Intel).
Накопитель схемы с общей информационной емкостью 16 Мбит разбит на 32 блока по 64
Кбайт.
Поясним смысл некоторых выводов и сигналов. Шина адреса: линии А 2о-16 выбирают один
из блоков, линии А15-1 выбирают слово в пределах одного блока (блок с емкостью 64 Кбайта
содержит 32 Кслов), линия A0 — бит выборки байта, определяющий старший и младший байты
при байтовой организации памяти и отключаемый при ее словарной организации. От
процессора поступает начальный адрес блока данных, который запоминается в очереди
адресов. Текущий адрес ячейки памяти для обмена формируется адресным счетчиком.
В шине данных DQ15-0 линии DQ7-0 предназначены для ввода и вывода младшего байта
данных, передачи команды в командный интерфейс пользователя CU1 в цикле записи и вывода
данных из буфера, регистров идентификатора или состояния в соответствующих режимах
чтения. Линии D15-8 предназначены для передачи старшего байта при словарной организации
памяти. По ним выводят данные накопителя, буфера или идентификатора в соответствующем
режиме чтения, но эти линии не используются для чтения К из регистров состояния. Если
кристалл не выбран или запрещен вывод, линии шины данных переходят в третье состояние.
Линии СЕо и CEi — входы разрешения кристалла, при высоком уровне любого из них
кристалл не выбран, и потребление мощности снижается до уровня состояния покоя (Standby)
после завершения текущей операции записи или стирания.
Сигнал ОЕ открывает выходные буферы при низком уровне и переводит их в третье
состояние при высоком.
Сигнал WE управляет доступом к командному интерфейсу пользователя CUI, I страничным
буферам, регистрам очереди данных и защелкам очереди адресов.
Сигнал RP (Reset/Power-Down) при низком уровне вводит схему в состояние глубокой
экономии мощности, отключая вес схемы, потребляющие статическую мощность. При выходе
из этого состояния время восстановления I схемы составляет 400 не. При переходе к низкому
уровню операции автомата записи прекращаются, схема сбрасывается.
Сигнал RY/BY (Ready/Busy) индицирует состояние внутреннего автомата записи. Низкий
уровень означает занятость, высокий (кстати говоря, сигнал вырабатывается каскадом с
открытым стоком, требующим подключения внешней цепочки Ucc— R для формирования
высокого уровня) означает или готовность к новым операциям, или приостановление стирания,
или состояние глубокой экономии мощности в зависимости от выполняемой операции.
Сигнал WP (Write Protect) имеет следующий смысл. Каждый блок имеет бит запрещения
записи (Lock-bit). Низкий уровень WP разрешает защиту, т- е. запись или стирание в блоке
могут выполняться только при Lock-bit = 0. При высоком уровне WP в блоках могут
выполняться операции записи и стирания независимо от состояния блокирующих битов.
Сигнал BYTE низким уровнем вводит схему в байтовый режим, высоким - в словарный и
выключает буфер линии Ао.
Напряжение программирования Upp и вывод напряжения питания (это может быть 3,3 или 5
В — вход обозначен дробью 3/5) поступают в схему мере: переключатель напряжения, который
находится внутри схемы.
Для примера приведем параметры ФФП фирмы lntel/28F032SA (1997 г.):
- организация 2М*16 или 4Мх8 (по выбору потребителя), напряжение питания 3,3 или 5 В
(по выбору потребителя), напряжение программирования 12 В, до I06 циклов стирания на блок,
64 независимо запираемы* блока по 64 Кбайт или 64 блока по 32 Кслов;
- корпус типа TSOP размерами 1,2x14x20 мм с 56 выводами;
- технология с топологической нормой 0,6 мкм
- время доступа при чтении 70 или 150 не при питании от 5 В и 3 В соответственно;
- время записи слова/байта не более 9 мкс;
- время записи блока не более 2,1 с для байтового режима и не более 1 с для словарного
режима;
- время стирания блока не более 10 с и стирания кристалла не более 25,6 с.
Память типа StrataFlash
В 1997 г. компания Intel представила новый вид Флэш-памяти, названный Стратафлэш
(StrataFlash), в которой впервые в одном элементе памяти хранятся два бита, а не один. Это
обеспечивается тем, что в плавающем затворе транзистора фиксируется не только наличие или
отсутствие заряда, но и определяется его величина, которая может иметь несколько значений.
Различая четыре уровня, можно хранить в одном элементе два бита.
До изобретения памяти Стратафлэш для увеличения емкости ЗУ шли путем уменьшения
размеров схемных элементов и других усовершенствований технологических процессов
литографии. СтратаФлэш ознаменовала другой подход к этой проблеме. Хранения двух битов
добились практически в тех же запоминающих элементах, которые ранее хранили один бит,
преодолев трудности ужесточения допусков на величины вводимых в плавающий затвор
зарядов. Во второй половине 90-х гг. появились коммерческие образцы памяти СтратаФлэш.
При этом от емкости 32 Мбита перешли к емкости 64 Мбита без заметных изменений площади
кристалла.
Запоминающие элементы программируются введением в плавающий затвор одного из 4-х
количеств заряда, каждое из которых соответствует паре двоичных цифр II, 10, 01, 00. В
зависимости от заряда, запоминающий транзистор имеет одно из четырех пороговых
напряжений. При считывании информации к затвору транзистора прикладывают напряжение
считывания.
Ток запоминающего транзистора зависит от порогового напряжения. Определяя ток, можно
выявить состояние плавающего затвора.
На рис. 4.22 показаны распределение пороговых напряжений в четырех-уровневом
запоминающем элементе (а) и схема чтения состояния запоминающего транзистора (б).
§4.5 Использование программируемых ЗУ для решения задач обработки информации
В предыдущих параграфах запоминающие устройства рассматривались с точки зрения
основной для них задачи хранения информации. Однако программируемая память есть также
универсальное средство решения самых разных задач обработки информации. Применимость
этого средства в указанной области определяется возможностью представления решения задачи
в табличной форме. Эта форма решения возможна для задач самого разного характера.
Для уяснения возможностей ППЗУ в области решения задач обработки информации
целесообразно рассмотреть основные соотношения, связанные с воспроизведением логических
и числовых функций.
C.4. Динамическое ОЗУ.Недостатки Динамическое ОЗУ.перезаписываемой Динамическое ОЗУ.памяти.
Основной недостаток ПЗУ – невозможность обновить информацию в этом виде памяти, – одновременно
является и его преимуществом: данные невозможно потерять случайно и умышленно. Особенно это стало
актуальным на рубехе XX – XXI веков, с вытеснением микросхем ПЗУ на CMOS и flash-память. Рассмотрим
возникающие проблемы.
C.4.1. Динамическое ОЗУ.Потеря Динамическое ОЗУ.данных Динамическое ОЗУ.в Динамическое ОЗУ.CMOS.
Компьютеры с ISA шиной (содержащие процессоры вплоть до i80286), имели минимум настроек. Часто они
вполне нормально работали в своей основной конфигурации.
Ситуация изменилась после появления на компьютерах памяти более чем 16 Мбайт, ШВУ контроллеров и PCIшины. Как выяснилось, в большинстве случаев стандартная настройка материнской платы стала неприменимой.
Для сохранения настроек пользователя их стали хранить в CMOS-памяти.
Иногда содержимое CMOS-памяти разрушается. Это возможно в следующих случаях:
1. Воздействие вируса. При своей работе вирус может специально внедряться в CMOS-память, чтобы
обеспечиватиь лучшие условия для его распространения либо специально вывести компьютер из строя.
2. Неисправность аккумулятора. В некоторых случаях аккумулятор CMOS-памяти может разряжаться (от
времени или короткого замыкания на плате.) В этом случаесодержимое CMOS может разрушиться не сразу, а по
прошествии двух - трех суток.
3. Скачок напряжения при работе с CMOS. В этом случае последствия непредсказуемы.
4. Установка пароля на загрузку. Иногда пользователь для защиты от несанкционированного доступа
устанавливает "пароль на загрузку". Если он потом забудет пароль, то для запуска компьютера будет необходим
сброс параметров CMOS-памяти путем короткого замыкания ее аккумулятора.
Для восстановления параметров CMOS-памяти после ее сброса существуют опции "стандартной" и
безопасной" настройки этой памяти на материнской плате. Пользователю в этом случае придется восстанавливать
не все, а только часть параметров. Опции "стандартной" и "безопасной" настройки хранятся в ПЗУ и изменить их
невозможно!
C.4.2. Динамическое ОЗУ.Потеря Динамическое ОЗУ.данных Динамическое ОЗУ.в Динамическое ОЗУ.flash-модули.памяти.
Потеря данных в flash-памяти возможна по тем же причинам, что и в CMOS-памяти. Однако для флэш-памяти
нет возможности вернуться к первоначальным установкам! В связи с этим потеря информации в флэш-памяти
может быть непоправимой.
... В 1998 году автор узнал о новом черезвычайно опасном вирусе –"Чернобыль". Опасность заключалась в его
действии – ровно в годовщину аварии на Чернобыльской АЭС этот вирус портил содержимое флэш-памяти и
наиболее важной ее части – BIOS. В результате компьютер не мог вообще осуществлять операции ввода-вывода, в
том числе и загрузку операционных систем. CMOS-память же оставалась в полном порядке! Поскольку
микросхема с BIOS обычно была припаяна к материнской плате, приходилось выкидывать всю материнскую
плату.
Автору известен только один способ 100% гарантии избежать действия этого вируса – аппаратно запретить
перзапись флэш-памяти. Дело в том, что новые версии этого вируса размножаются лавинообразно, и нет гарантии,
что он сработает именно в эту дату.
Реализация логических (переключательных) функций
ППЗУ с организацией 2П1х1 принимает m-разрядный адрес и выдает одноразрядный
результат (0 или 1). Этот способ функционирования непосредственно воспроизводит
переключательную функцию m переменных, т. к. для каждого входного набора можно при
программировании ЗУ назначить необходимую выходную переменную. Например. ППЗУ с
организацией 1024x1 может быть использовано для воспроизведения переключательной
функции 10 аргументов.
ППЗУ с организацией 2тхп по поступающему на его вход т-разрядному адресу выдает nразрядное выходное слово, хранящееся в ячейке с данным адресом. Такое ЗУ воспроизводит
систему переключательных функции, число которых равно разрядности выходного слова.
Действительно, на каждом выходе может быть воспроизведена любая переключательная
функция т-аргументов, а совокупность выходов даст п различных функций.
В ППЗУ функции реализуются в совершенной дизъюнктивной нормальной форме, для
каждой возможной конъюнкции имеется свое оборудование (выходная линия дешифратора
адреса) и, следовательно, она может быть введена в выходную функцию. Какой-либо
минимизации функций при подготовке задачи к решению на основе НИЗУ не требуется, более
того, если функции уже минимизированы, то для удобства подготовки данных для
программирования ЗУ их придется развернуть до самой громоздкой формы (СДНФ). Это
делается либо заполнением карты Карно и последующей записью функции без какого-либо
объединения единиц, либо введением в каждую конъюнкцию недостающих переменных х\
путем домножения конъюнкции на равные единице выражения xs Vxi с последующим
раскрытием скобок (X; — вводимая переменная). Пример приведения функции в СДНФ:
F= XiVx2X3 = XI(x2VX2)(X3\/X3)\/(Xi\/XI)X2X3 = Х1Х2Х3\А1Х2Х3\/Х,Х2Хз\/Х1Х2Хз\/х,Х2Хз.
Для воспроизведения этой функции по пяти конъюнкциям-адресам в ППЗУ следует записать
единицы, по остальным адресам — нули.
Реализация функции в СДНФ определяет большие затраты элементов памяти, однако цена
элемента памяти значительно ниже цены логического элемента, поэтому даже при
избыточности числа элементов памяти в несколько раз (в сравнении с числом логических
элементов, необходимых лля воспроизведения функции традиционным методом) реализация на
ППЗУ может оказаться выгодной.
Особенности ППЗУ указывают на целесообразность его использования для реализации в
первую очередь функций, не поддающихся существенной минимизации.
Пи этом время выполнения операции — время считывания данных из ЗУ.
Реализация конечных автоматов
В канонической схеме автомата ППЗУ может заменить комбинационную цепь, поскольку
оно способно воспроизводить переключательные функции. Поэтому структура автомата без
потери общности может быть представлена I также в виде, приведенном на рис. 4.23.
Начальная установка регистра задает исходное состояние элементов памяти (автомата). По
этому состоянию и входным сигналам из памяти считывается код нового состояния и функции
выхода. В следующем такте эти процессы повторяются. В каждом очередном такте автомат
переходит в новое состояние и вырабатывает выходные функции согласно таблицам переходов
и выходов.
Емкость ППЗУ определяется объемом таблиц, задающих функционирование автомата.
Сведя таблицы переходов и выходов в одну, получим общее число входов m = k + q и число
выходов п = р + q следовательно, для реализации автомата требуется емкость памяти М = 2 к+ч(р
+ q).
Воспроизведение арифметических операций и функциональных зависимостей
Арифметические операции и числовые (не логические) функции часто I встречаются в
качестве задач, решаемых цифровыми устройствами. Функции задаются аналитически или
таблично.
Для функций одного аргумента объем памяти таблиц легко вычислить, *нан разрядности
аргумента и функции. При задании аргумента т-разрядным кодом число точек, в которых
задана функция, составит 2т (рис. 4.24, а). I Если разрядность кода, представляющего функцию,
равна п, то, очевидно, емкость памяти в битах будет равна n2m.
С ростом числа аргументов объем памяти для запоминания таблиц функций быстро растет.
Для функции двух аргументов разрядностей m число точек, в которых задана функция,
определится как произведение чисел точек по каждой из координат и составит 22т (рис. 4.24, б).
Объем памяти таблицы и этом случае составит М = n22m.
Для функций f аргументов М =n2fm
Итак, с ростом разрядности слов и числа аргументов функций объем памяти таблиц быстро
растет и чисто табличный метод решения задачи становится неприемлемым. В этих случаях
часто очень полезны таблично-алгоритмические методы, в рамках которых можно существенно
снизить объем таблиц, введя небольшое число простых операций над данными.
Для произвольных функций f(x) простейший таблично-алгоритмический метод — кусочнолинейная аппроксимация, когда запоминаются только узловые значения функции, а в
промежутках между узлами функция вычисляется в предположении, что на промежутках она
изменяется линейно. Число узлов назначается по соображениям точности линейной
аппроксимации функции на участках. Кусочно-линейной аппроксимации с постоянным шагом
соответствуют следующие представления аргумента и функции:
x = Xi+Ax, f(x)=f(xj)+Af(xi)Axh_I,
где Xj — координата i-й узловой точки; Дх — разность значений х и координаты
ближайшей слева узловой точки; Af(xs) — приращение функции на участке от XJ до x,+ i; h —
шаг аппроксимации (для удобства реализации цифровыми методами шаг берут равным целой
степени числа 2).
ГЕНЕРАТОРЫ КОЛЕБАНИЙ
4.1. Общие сведения о генераторах
Электронные цепи, в которых периодические изменения напряжения и тока возникают без
приложения к ним дополнительного периодического сигнала, называются автономными
а в т о к о л е б а т е л ь ными цепями, а устройства, выполненные на их основе,—
а в т о г е н е р а т о р а м и или г е н е р а т о р а м и к о л е б а н и й соответствующей формы. Эти цепи
следует рассматривать как преобразователи энергии источника питания постоянного тока в
энергию периодических электрических колебаний.
Автогенераторы можно разделить на генераторы импульсов и генераторы синусоидальных
колебаний. Генераторы импульсов в зависимости от формы выходного напряжения делят на
генераторы: напряжения прямоугольной формы (ГПН); напряжения экспоненциальной формы;
линейно изменяющегося напряжения (ГЛИН); напряжения треугольной формы; ступенчато
изменяющегося напряжения; импульсов, блокинг-генераторы и т.д..
Генераторы синусоидальных колебаний классифицируют по типу колебательной системы и
подразделяют на: LC-автоге-нераторы; RС-автогенераторы; генераторы с кварцевой стабилизацией частоты; генераторы с электромеханическими резонансными системами стабилизации
частоты.
Для получения незатухающих колебаний во всех названных автогенераторах используются
компоненты электроники, на вольт-амперных характеристиках которых имеется или создан с
помощью цепи положительной ОС участок с отрицательным дифференциальным сопротивлением.
Так как в большинстве автогенераторов используются электронные усилители с положительной
ОС, то будем рассматривать только их.
Мы уже знаем, что при положительной ОС, когда фазовый сдвиг по петле усилитель — цепь
обратной связи фпет равен нулю и Ky=l, усилитель теряет устойчивость. Если в цепи усилителя или
цепи ОС нет элемента накапливающего электрическую энергию, то усилитель с положительной
ОС превращается в триггер и имеет устойчивые состояния.
При наличии в петле усилитель — цепь обратной связи элемента, накапливающего энергию,
например конденсатора, усилитель с положительной ОС не имеет ни одного устойчивого
состояния и генерирует периодически изменяющееся напряжение.
Генераторы напряжений экспоненциальной формы. Эти генераторы аналогичны рассмотренным.
Отличие их заключается в том, что выходное напряжение снимается с времязадающего
конденсатора С, на котором оно меняется по экспоненциальному закону.
Генераторы линейно изменяющегося напряжения (ГЛИН). Если у автогенератора конденсатор С
заряжать не через резистор R, а через источник стабильного тока I= const, то напряжение на
конденсаторе будет изменяться в соответствии с уравнением
4.2. Генераторы прямоугольных импульсов
Очень простой генератор можно получить следующим образом: будем заряжать конденсатор
через резистор (или источник тока), а затем, когда напряжение достигнет некоторого порогового
значения, быстро его разрядим и начнем цикл сначала. Это можно сделать с помощью внешней
цепи, обеспечивающей изменения полярности тока заряда при достижении некоторого порогового
напряжения. Генераторы, построенные на этом принципе, известны под названием
«релаксационные генераторы». Они просты и недороги и при умелом проектировании могут
обеспечивать удовлетворительную стабильность по частоте. Раньше для создания релаксационных
генераторов применялись устройства с отрицательным сопротивлением, такие, как
однопереходные транзисторы или неоновые лампы, теперь предпочитают ОУ или специальные
интегральные схемы таймеров.
Для получения импульсов прямоугольной формы широко используются релаксационные
генераторы, построенные на основе усилителей с положительной обратной связью.
Генераторы импульсов, состоящие из широкополосных электронных усилителей, охваченных
положительной обратной связью, глубина которой остается почти постоянной в широкой полосе
1
частот, и имеющие в петле обратной связи элементы, накапливающие энергию (обычно с
помощью RС-цепей), называются мультивибраторами. Если ПОС создается с помощью
импульсного трансформатора, то такие релаксационные генераторы называют блокинг-генераторами.
Релаксационные генераторы могут работать в двух режимах, автоколебательном и ждущем.
В автоколебательном режиме схема имеет два квазиустойчивых состояния, длительность
каждого из которых определяется времязадающей цепью.
В ждущем режиме схема имеет одно устойчивое состояние, в котором может находиться
неограниченно долго. Под действием короткого запускающего внешнего импульса схема скачком
переходит в квазиустойчивое состояние, а затем самостоятельно возвращается в исходное
состояние, формируя импульс заданной длительности.
4.3. Релаксационные генераторы на транзисторах
4.3.1. Релаксационный RL - генератор
Если посмотреть на рис.4.1, нетрудно заметить, что транзисторы соединены между собой
таким способом, при котором образуется аналог тринистора. К управляющему электроду
"тринистора" подключена катушка индуктивности L1, а в цепи катода стоит резистор R1. Если
транзистор VT1 может быть и кремниевым и германиевым, то VT2 - обязательно германиевым,
поскольку именно он обладает способностью усиливать сигналы практически без напряжения
смещения на базе.
Рис. 4.1. Принципиальная схема RL - генератора.
Работает этот генератор так. Как только подаётся питающее напряжение, транзистор VT1
приоткрывается (переходит в рабочий режим) , так как через его эмиттерный переход течёт
начальный ток коллектора транзистора VT2. Поскольку генератор представляет собой
неинвертирующий усилитель, выход которого замкнут на вход, случайное увеличение
коллекторного тока любого из транзисторов (скажем, из-за собственных шумов транзисторов,
внешних наводок и т.д.) немедленно усиливается и приводит к лавинообразному открыванию
транзисторов до состояния насыщения, как это обычно происходит в тринисторе (момент t1 на
рис. 4.2).
Рис.4. 2. Форма сигнала RL - генератора.
Катушка индуктивности не препятствует открыванию транзисторов, её сопротивление для
2
импульсных сигналов велико.
После открывания транзисторов ток через катушку возрастает по экспотенциальному закону.
Так же возрастает и ток коллектора транзистора VT1. Вскоре транзистор VT1 выходит из
насыщения, падение напряжения на нём увеличивается. Напряжение же на катушке уменьшается,
и развивается лавинообразный процесс закрывания транзисторов (момент t2 на рис. 4.2).
Энергия, накопленная в катушке в виде магнитного поля, препятствует быстрому уменьшению
тока через катушку, и он спадает до нуля плавно. причём этот ток поддерживается ЭДС
самоиндукции, величина которой после закрывания транзисторов может в десятки раз превышать
напряжение источника питания. Энергия магнитного поля рассеивается в виде тепла в переходах
транзисторов, ЭДС самоиндукции постепенно спадает до нуля, ток через катушку прекращается и
цикл генерации повторяется (момент t3 на рис. 4.2).
Таким образом, на катушке индуктивности L1 возникает непрерывная последовательность
прямоугольных импульсов напряжения, а ток через катушку течёт в виде последовательности
пилоообразных импульсов.
Несколько иначе протекает процесс генерации при использовании в качестве катушки
индуктивности обмотки головных телефонов BF1 (рис. 4.3).
Рис. 4.3. Принципиальная схема RL - генератора с головными телефонами.
Частота следования импульсов на ней синхронизируется с резонансной частотой собственных
колебаний мембраны. (рис. 4.4).
Рис. 4.4. Форма сигала на головных телефонах.
Происходит это потому, что телефон является обратимым преобразователем , т.е. колебания
мембраны, вызванные внешними импульсами напряжения, в свою очередь возбуждают в обмотке
телефонов переменное напряжение (штриховая линия на рис. 4.4), которое суммируется с
напряжением генератора и прикладывается к базе транзистора VT2.
Работа телефонов на резонансной частоте мембраны резко повышает КПД генератора как
электоракустического преобразователя, в результате чего значительная громкость получается при
малой мощности, потребляемой от источника питания.
Для смягчения тембра звучания телефонов параллельно их обмотке можно подключить
конденсатор C1 - тогда форма колебаний на обмотке телефонов приблизится к синусоидальной, а
импульсы ЭДС самоиндукции практически исчезнут (это кстати, исключит возможность пробоя
переходов транзисторов).
Генератор, собранный по схеме рис. 4.3 , может использоваться как экономичный и простой
звуковой сигнализатор, особенно в устройствах с автономным питанием, а так же в качестве
пробника для проверки ("прозвонки") различных электрических цепей. В последнем варианте
достаточно включить в разрыв провода питания двухпроводный шнур со щупами на концах - ими
и касаются проверяемых цепей.
На месте BF1 можно использовать головные телефоны или капсюль от них сопротивлением
постоянному току не более 250 Ом. Транзистор VT1 - серий МП35 - МП38, а VT2 - МП21, МП25,
МП26.
3
На рис. 4.5 приведена схема генератора с динамической головкой BA1. Резистор R1 в этом
генераторе переменный, им устанавливается режим устойчивой генерации. Звучание маломощной
динамической головки (0.5ГД-30 или аналогичная) с малой площадью диффузора напоминает
автомобильный сигнал.
Рис.4.5. Принципиальная схема RL - генератора с динамической головкой.
Такой генератор можно использовать в моделях автомобилей, в качестве квартирного звонка и
звукового сигнала на велосипеде. Транзисторы генератора могут быть такие же, что и в
предыдущем случае. Кроме того, на месте VT2 хорошо работают транзисторы серий МП39-МП42.
Если между коллектором транзистора VT1 и базой VT2 включить разделительный конденсатор
C2 и использовать головной телефон BF1 (рис. 4.6), генератор будет формировать пакеты
импульсов, имитирующие птичьи трели. Конденсаторы могут быть любого типа, переменный
резистор - СП-1, головной телефон (или капсюль) - сопротивлением не более 250 Ом, например
ДЭМ-4М, транзисторы - такие же что и в предыдущем генераторе.
Рис. 4.6. Принципиальная схема RL - генератора с разделительным конденсатором.
Как упоминалось выше, амплитуда импульсов ЭДС самоиндукции на обмотке телефона
достигает значительной величины. Учитывая это, можно использовать генератор как
преобразователь напряжения. Такой преобразователь, например, станет незаменимым источником
питания авометра, при измерении больших сопротивлений. Известно, что для большинства
авометров требуется для этого режима отдельный источник, который не всегда есть под руками.
Кроме того, дополнительные операции, связанные с его подключением , снижают оперативность
измерений. Всё это приводит к тому, что один из диапазонов измерений авометра остаётся
неиспользованным.
Выйти из положения поможет преобразователь напряжения из RL - генератора (рис. 4.7),
встраиваемый в корпус авометра. Он содержит минимум элементов и не требует налаживания
после изготовления. В конструкцию авометра при этом необходимо ввести небольшие изменения:
установить на его корпусе переключатель SA1, включить его контакты в разрыв плюсового
провода питания и подключить преобразователь к минусовому выводу элемента G1 авометра.
Рис.4.7. Принципиальная схема преобразователя напряжения.
В положении "выкл" переключатель замыкает разрыв в плюсовом проводе питания, и авометр
используется в обычных режимах. Хотя преобразователь при этом и остаётся подключённым к
источнику питания, он практически не потребляет энергии - диод и стабилитрон включены по
4
отношению к источнику питания в обратном направлении.
Для работы в режиме измерения больших сопротивлений переключатель переводят в
положение "вкл.". В действие вступает генератор на транзисторах VT1, VT2. Импульсы ЭДС
самоиндукции обмотки телефонов BF1 заряжают через диод VD2 конденсатор С1. Напряжение на
нём быстро возрастает и стабилизируется на уровне примерно 12В (напряжение стабилизации
стабилитрона VD1). Суммируясь с напряжением источника питания, оно поступает на цепи
измерения авометра. Звуковой сигнал, издаваемый телефонами BF1, напоминает о том, что
переключатель после окончания измерений надо перевести в положение "выкл.".
Ток, потребляемый преобразователем от источника напряжения, составляет примерно 5 мА.
Ток нагрузки преобразователя не должен превышать 100 мкА, иначе увеличится амплитуда
пульсаций выходного напряжения и снизится точность измерений. Поэтому применять
преобразователь желательно лишь в авометрах с минимальным пределом измерения постоянного
тока 100 мкА.
Транзисторы преобразователя могут быть такие же, что и в предыдущих устройствах. Кроме
указанных на схеме, подойдут стабилитроны Д813, КС213, диоды Д219, Д223, КД102, КД103 с
любым буквенным индексом. Резистор - любого типа, малогабаритный. Головные телефоны капсюль ДЭМ-4М, ТК-67 или другой , электромагнитной системы, с сопротивлением обмотки
постоянному току 50...100 Ом.
4.3.2. Симметричный мультивибратор
Симметричный (по структуре) мультивибратор, показан на рис. 4.8.
Рабочий цикл. Работа мультивибратора в течение одного полного периода описывается
временными диаграммами на рис. 4.9. Открытый транзистор будем считать насыщенным. Очередное
опрокидывание схемы происходит тогда, когда напряжение на базе ранее запертого транзистора
делается равным нулю и он отпирается. При этом возрастающий коллекторный ток идет в базу
другого транзистора через емкость и выводит его из насыщения, после чего наступает регенерация.
Пусть в момент t = 0 открылся транзистор Т1, поскольку потенциал U61, уменьшаясь, достиг
нулевого значения. В результате насыщения транзистора Т1 потенциал UK1, который до скачка был
равен Ек — IKoRK1, падает до нуля; транзистор Т1 «стягивается в точку». Напряжение Ucl на
конденсаторе С1 в первый момент не меняется и остается равным Ек — IK0RK1 (так как потенциал
U62 до скачка был равен нулю, а потенциал UKl был равен Ек — IK0RK1). Отсюда следует, что ток Iк1 в
момент t=0 возрастет от значения Iк0 до Ек (gK1 + 2g1). Слагаемое 2EKg1 обусловлено тем, что
резистор R1 после скачка находится под напряжением Ucl + Ек 2ЕЕК. Напряжение на конденсаторе
С2Е перед скачком было близко к нулю и сохраняет это значение непосредственно после скачка.
Отсюда следует, что базовый ток 161 (который до опрокидывания был равен —Iк0) возрастает до Ек
(gK2Е + g2), поскольку резисторы RK2Е и R2Е в первый момент соединены параллельно через
незаряженный конденсатор С2Е. Положительный скачок потенциала UKl передается через конденсатор
С1 на базу транзистора Т2Е и поддерживает его в запертом состоянии.
Коллекторный ток Iк2 до скачка был равен EK.(gK2Е + g2Е), а после опрокидывания падает до значения Iк0. Легко заметить, что ток Iк2 (-0) равен току Iб1 (+0), т. е. во время скачка коллекторный ток
запирающегося транзистора «переходит» в базу отпирающегося транзистора. Потенциал UK2Е В
момент t = 0 не изменяется и остается близким к нулю. Это следует из равенства Uк2 (-0) = U61
(+0) + UC2Е (0),где оба слагаемых в правой части очень малы. Ток Iб2, который до опрокидывания
был равен EKg1, после опрокидывания уменьшается до —Iк0. Таков в первом приближении результат
происшедшего переброса в схеме.
5
Начиная с момента t = 0 величины в схеме изменяются следующим образом. Потенциалы U61,
UK1и токи Iк2, I62 остаются практически неизменными, близкими к нулю. Потенциал U62Е, равный
напряжению на конденсаторе С1, уменьшается с постоянной времени C1R1t стремясь к величине —
(Ек + IK0R1) (последняя легко получается, если мысленно убрать из схемы запертый транзистор Т2Е и
заменить его со стороны базы генератором теплового тока). На самом деле разряд конденсатора
прерывается по достижении потенциалом U62Е нулевого значения. Тогда отпирается транзистор Т2Е и
происходит обратное опрокидывание схемы. Кривая U62Е пересекает ось времени весьма круто, так что
момент переброса хорошо фиксирован. В момент обратного опрокидывания при t = Т1 напряжение
Uс1(T1)0. Ток Iк1 немного уменьшается по мере разряда конденсатора С1, стремясь к
установившемуся значению EKgKl. Поскольку Uс1(T1)0, ток Iк1 в конце первого полупериода
будет равен Ек (gKl + g1), т. е. уменьшится за время Т1 на .величину EKg1. Ток Iб1 значительно
уменьшается по мере заряда конденсатора С2Е, стремясь к установившемуся значению EKg2Е; последнее
должно быть достаточным для того, чтобы сохранилось насыщение. Заряд конденсатора С2
происходит с постоянной времени C2ЕRK2Е и обычно заканчивается задолго до конца полупериода.
Потенциал Uк2Е, равный напряжению на конденсаторе С2Е, спадает экспоненциально до
установившейся величины Eк=-Iк0Rк2.
Второй полупериод работы схемы (Т2Е) не нуждается в дополнительных пояснениях (в случае
Т1Т2Е термин п о л у п е р и о д , разумеется, условен и означает соответствующую часть периода).
В момент Т = Т1 + Т2Е рабочий цикл схемы начинает повторяться.
Полагая Uб2 (T1) = 0, получаем длительность первого полупериода:
Учитывая, что R1>> RK, приведем выражение для первого полупериода к следующему виду:
Аналогично для второго полупериода получим:
где
является фактором теплового тока, характеризующим отношение последнего к насыщающему
току базы.
Если тепловой ток /к0 отсутствует (кремниевые транзисторы или низкая рабочая температура),
то формулы (18-2) упрощаются:
T1=1ln20.7C1R1;
T2 = 21n20,7С2R2.
6
В полностью симметричном мультивибраторе, в котором
R1 = R2 = R
C1= С2 = С,
длительности полупериодов будут одинаковыми и полный рабочий период
В факторе скрыта температурная зависимость полупериодов, а следовательно, и рабочей
частоты. С увеличением температуры увеличивается ток Iк0, длительность полупериодов
уменьшается, а рабочая частота растет. Поэтому величину фактора стараются делать малой. Тогда в
формуле (18-5а) можно разложить логарифм в ряд с точностью до членов первого порядка и
получить приближенное выражение
Задаваясь приемлемым значением , находят необходимую величину R, а затем величину С.
Одним из способов повышения температурной стабильности является применение транзисторов с
малым током Iк0, т. е. кремниевых. Однако, поскольку тепловые токи — не единственная причина
нестабильности, использование кремниевых транзисторов не всегда решает задачу стабилизации,
особенно при пониженных температурах. Не менее важными причинами являются температурная
зависимость напряжений на переходах насыщенного транзистора, а также зависимость (Т). С
ростом температуры регенерация наступает раньше, т. е. длительность полупериодов сокращается,
а частота увеличивается.
Основными времязадающими элементами в транзисторном мультивибраторе являются емкости C1
и С2, поскольку сопротивления R1 и R2Е ограничены сверху условием насыщения, а снизу либо
временем рассасывания, либо (если одновременно уменьшать RK) потребляемой мощностью.
Увеличение емкостей в принципе не ограничено, хотя сопровождается существенным удлинением
отрицательного фронта. Уменьшение же емкостей (повышение рабочей частоты) ограничено
условием равенства положительного и отрицательного фронтов.
4.4. Релаксационные генераторы на ОУ
4.4.1. Мультивибратор на операционном усилителе
Рис. 4.10. Мультивибратор на ОУ.
Схема мультивибратора на ОУ представлена на рис. 4.10,а. Конденсатор С и резисторы R1, R2Е
образуют интегрирующую RС-цепь: при заряде конденсатора открыт диод VI, ток проходит через
R1, при разряде — открыт V2Е, ток идет через R2Е. Источником напряжения Е является выходная
цепь ОУ. Компаратор выполнен на ОУ с ПОС через цепь R3R4. При переключениях компаратора
на его выходе происходит коммутация цепей заряда и разряда конденсатора С, т. е. ОУ выполняет
сразу несколько функций: источника напряжений заряда и разряда конденсатора, компаратора и
ключа
Рассмотрим работу мультивибратора. Временные диаграммы приведены на рис. 4.10,б. Пусть
при t < t1 источники питания ОУ отключены: Eп=0, —Eп=0. Конденсатор С разряжен и Uс=0. В
момент t1 подключим Еп и —Еп, При их включении выходное напряжение ОУ UВых отклонится
либо в положительном, либо в отрицательном направлении (случайный процесс). Для
определенности допустим, что произошло положительное приращение UВых. Через цепь R3R4 это
приращение подается на прямой вход ОУ, усиливается и в свою очередь вызывает приращение
U’вьx. Процесс развивается лавинообразно, в результате в момент t1 скачком устанавливается UВых
= Uвых max. Начиная с момента t1, конденсатор С заряжается напряжением U = Uвых max через
7
резистор R1, так как к аноду диода V1 приложено положительное напряжение, постоянная
времени =R1C. Нарастающее по экспоненте напряжение Uс подается на инвертирующий вход
ОУ. На прямой вход ОУ через цепочку ПОС R3R4 подается напряжение
Uос = Uвыхmax R4/(R3 + R4) = U0
В момент t=t2 напряжение на конденсаторе Uс достигает значения U0 и происходит
срабатывание компаратора. Его переключение протекает лавинообразно (регенеративный процесс)
и завершается при Uвых = - Uвыхmax. Напряжение на конденсаторе не может измениться
скачком и, начиная с момента t2Е, происходит перезаряд конденсатора через резистор R2Е
напряжением U= - Uвыхmax с постоянной времени =R2ЕC (на диоде V2Е прямое напряжение —
минус на катоде). Воздействуя на диод V1 и V2Е, компаратор осуществляет переключение цепей
заряда (V1, R1) и разряда (V2Е, R2Е) конденсатора С. При t2Е<t<t3 напряжение на прямом входе ОУ
Конденсатор С не успевает разрядиться до напряжения - Uвыхmax, так как в момент t3
напряжение на нем достигает значения —Uo и снова происходит регенеративное переключение
компаратора, при этом устанавливается Uвых = Uвыхmax, Uoc=U0. Вновь начинается этап заряда
конденсатора С через резистор R1. При напряжении на конденсаторе Uс (t4) = U0 происходит
очередное срабатывание компаратора.
Установившийся процесс начинается при t=t2Е и характеризуется изменением напряжения на
конденсаторе от U0 к - U0 и обратно. Интервал t3—t4 определяет длительность импульса tи,
длительность паузы tп=t3—t2.
Найдем tи и tп. Для этого воспользуемся анализом схемы заряда конденсатора С, выполненным
ранее.
Для нахождения tи рассмотрим заряд конденсатора С от источника E= Uвыхmax с
постоянной времени =R1C. Процесс начинается при Uс(0) = -U0 и завершается при Uс(t4) = U0.
Учитывая зависимость U0 от UВЫх max, получим
tи = R1Cln(1+2R4/R3).
Интервал паузы tn найдем при рассмотрении перезаряда конденсатора С от источника Е =
-Uвыx max с постоянной времени =R2С; Uс(0) = U0; Uc(tп)=—U0.
Период повторения
Тп = tи + tп = (R1 + R2) С ln (1 + 2ЕR4/R3).
Скважность
Q = Tп/tи = (R1+ R2)/R1.
Отметим, что значения tи, tn, Тп и Q не зависят от параметров ОУ. Это обусловливает высокую
стабильность частоты и скважности Q мультивибратора. В реальных мультивибраторах процессы
развиваются несколько сложнее, так как Uвых ОУ при прямом и обратном насыщении не вполне
одинаковы по величине, имеется напряжение смещения нуля, срабатывание компаратора
происходит при ненулевом напряжении Uс - Uос. Эти факторы несколько снижают стабильность
работы схемы.
Рассмотрим способы регулировки частоты и скважности мультивибратора.
1. При регулировке частоты f скважность Q не должна изменяться. Можно предложить
следующие способы регулировки частоты:
а) изменением емкости конденсатора С. Этот способ применяется редко, так как связан с
громоздкими решениями;
б) изменением отношения Rз/R4 путем изменения одного из этих сопротивлений. При этом
изменяется Uo. Например, при увеличении R4 увеличивается U0, конденсатор С за время tи должен
заряжаться до большего напряжения U0, но его постоянная времени неизменна, поэтому tи растет.
Так же изменяется и tп, следовательно, частота f уменьшается.
2. При регулировке скважности необходимо поддерживать постоянным значение f, т. е. при
увеличении длительности импульса на то же значение необходимо уменьшить длительность
паузы. Для этого R1 и R2Е в схеме рис. 5.1 выполняются в виде потенциометра, средняя точка
8
которого присоединена к инвертирующему входу ОУ, а крайние точки - соответственно к катоду
диода V1 и аноду диода V2Е. При регулировке сдвигается средняя точка потенциометра, но сумма
сопротивлений R1 + R2Е остается неизменной.
Мультивибратор на рис. 4.11 по принципу работы аналогичен рассмотренному. Отличие его в
том, что времязадающий конденсатор С включен в цепь положительной обратной связи, а уровни
пороговых напряжений изменяются на неинвертирующем входе. Это осуществляется с помощью
резисторов R1, R2.
Диоды и резисторы R4, R5 включены для защиты входа ОУ от больших значений
дифференциального входного напряжения. Применение их обязательно в тех случаях, когда
разность напряжений на дифференциальных входах превышает максимально допустимое
напряжение для данной микросхемы.
4.4.2 Одновибратор на операционном усилителе
Одновибратор является формирователем одиночного импульса прямоугольной формы и
фиксированной длительности, возникающего на выходе при поступлении на вход запускающего
короткого импульса. Одновибратор применяется либо в качестве формирователя прямоугольных
импульсов, либо в качестве узла задержки импульсов на заданное время.
Схема одновибратора на ОУ приведена на рис.4.12,а. Сравним эту схему со структурной
схемой рис. 4.10. Одновибратор содержит конденсатор C1, связанный с выходом компаратора на
ОУ через резистор R. В качестве компаратора использована хорошо нам знакомая схема с ПОС
через цепочку R3R4. Микросхема ОУ выполняет в одновибраторе несколько функций: компаратора, источника напряжения для заряда конденсатора и ключа, так как коммутация цепей
заряда и разряда конденсатора осуществляется при переключении компаратора. Диод V1 служит
для фиксации начального напряжения на конденсаторе Uc(0). Элементы С2, R4, R5, V2Е составляют
цепь запуска, через них на схему поступает короткий запускающий импульс ивк. Цепочка C2ЕR5
является дифференцирующей, Временные диаграммы напряжений в схеме одновибратора
приведены на рис. 4.12, б. Рассмотрение работы одновибратора нужно проводить по этапам в
соответствии с порядком его работы.
1 этап (исходное состояние, «ждущий» этап), uвх=0. Будем считать, что компаратор ранее
был приведен в состояние Uвых=—Uвых max. Конденсатор C1 разряжен, так как диод V1
препятствует его заряду выходным напряжением ОУ через резистор R. Нетрудно убедиться, что
рассматриваемое состояние устойчиво, т. е. может длиться сколь угодно долго: иос<ис,
9
следовательно, компаратор действительно находится в состоянии отрицательного насыщения
2 этап (формирование импульса). При ивх>0 к прямому входу ОУ прикладывается входное
напряжение, которое действует сильнее, чем сигнал с выхода ОУ через Rз. Напряжение на
прямом входе становится положительным. Поскольку на инвертирующем входе сохраняется
uc(t1)=0, то компаратор регенеративно переключается и напряжение на его выходе скачком
достигает Uвых=Uвыхmax. На этапе формирования импульса надобность в поддержании
напряжения на входе после переключения компаратора отпадает, так как положительное насыщение ОУ поддерживается положительным напряжением, подаваемым с его выхода на прямой
вход по цепи R3R4. Поэтому входной импульс одновибратора может быть весьма коротким. При
t>t1 конденсатор С1 заряжается напряжением UВЫх max через резистор R, причем =RC1. Этап
формирования импульса завершается в момент t2Е, когда напряжение на конденсаторе достигает
значения напряжения ПОС на прямом входе:
В этот момент компаратор регенеративно переключается.
3 этап (стадия восстановления исходного состояния). Итак, в момент t2Е скачком
устанавливается Uвык = - Uвыхmax. Конденсатор С1 начинает разряжаться через резистор R от
источника напряжения - Uвыхmax. притом =RC1. В момент t3 напряжение на конденсаторе
достигает Uс(t3)=0, открывается диод V1, который препятствует дальнейшему уменьшению
напряжения на конденсаторе. В момент t3 стадия восстановления завершается, одновибратор готов
к приходу нового импульса на входе.
Рассчитаем длительность импульса. Начало его формирования происходит в момент t1, Uс(0) =
0, Е=Uвыxтах, постоянная времени =RC1. В момент срабатывания компаратора uc(t2Е) = U02Е. При
подстановке этих величин в (3.9), учитывая связь U02Е и Uвыхmax, получаем
tи= RC1 ln(U вых макс/(U вых макс – Uо2)) = RC1 ln(1+R4/R3)
Аналогично рассчитываем длительность стадии восстановления tB=t3—t2. Для этого подставим
в (3.9) Uc(0) = U02Е, E =- Uвыхmax, =RC1, uC(t3) = 0.
Получим
Регулировка длительности импульса одновибратора tи может осуществляться следующими
способами:
а) изменением R или C1 (последнее обычно не применяют, так как конденсатор с переменной
емкостью обладает большими габаритами и массой), при этом изменяется скорость заряда
конденсатора С1; .
б) изменением соотношения R3/R4. При этом изменяется напряжение срабатывания
компаратора U02, а с ним и время, в течение которого напряжение на конденсаторе нарастает до
величины U02Е.
При использовании одновибратора не следует забывать, что схемы с ПОС имеют низкую
помехоустойчивость. В исходном состоянии напряжение на прямом входе ОУ. Uoc = U01 должно
быть много больше уровня помех. Естественно, что и амплитуда входного сигнала при этом должна
быть большой, чтобы обеспечить переключение компаратора в начале стадии формирования
импульса.
4.5. Генераторы на интегральных микросхемах.
В настоящее время широко применяются мультивибраторы, выполненные в виде гибридных
ИМС, а также на базе логических ИМС и операционных усилителей.
Мультивибраторы на основе логических ИМС обычно применяют в цифровой аппаратуре, так
как при этом наиболее полно обеспечивается унификация элементной базы. Кроме того, не
требуется согласование по уровням сигналов релаксационных генераторов и других устройств аппаратуры.
10
Мультивибраторы, к стабильности частоты которых не предъявляются жесткие требования,
часто выполняют на ЛЭ (рис. 4.13, а, б). Они эквивалентны схеме рис. 4.11, так как ЛЭ — это
усилители с большим коэффициентом усиления, имеющие два значения пороговых напряжений:
U°пор, U1пор. В обеих схемах имеется положительная обратная связь. Стадии квазиравновесия
обусловлены тем, что после процесса регенерации, возникающего при выходе в активную область
всех ЛЭ, входящих в петлю ОС, ко входу ЛЭ окажется приложенным напряжение, большее Ulnop
или меньшее U°nop. По мере зарядки конденсатора С напряжение на входе соответственно
снижается или повышается до уровня, при котором ЛЭ выйдут в активную область, и процесс
регенерации повторится. Подобные мультивибраторы имеют невысокую временную и
температурную стабильность частоты колебаний. Так, для ЛЭ серии 155 нестабильность частоты
может достигнуть 5—10% при изменении напряжения питания на 5%. Колебания температуры от
5 до 60 °С меняют частоту на 10—20%.
Промышленность выпускает специальные микросхемы мультивибраторов, например К263ГФ1.
Изменяя емкость дополнительного навесного конденсатора, у них можно изменять частоту
автоколебаний от долей Гц до 80 МГц.
Для получения высокой стабильности частоты вместо времязадающего конденсатора часто
включают кварцевый резонатор (рис. 4.13, в). При этом вследствие высокой добротности
кварцевого резонатора форма импульсов отличается от прямоугольной.
Иногда необходим генератор с очень низким уровнем шума (так называемый «низкий
внеполосный шум»). В этом отношении хороша простая схема, показанная на рис. 4.14. В ней
используется пара КМОП-инверторов, соединение которых между собой образует некоторую
разновидность RC релаксационного генератора с выходным сигналом в виде прямоугольного
колебания. Реальные измерения, приведенные для этой схемы, работающей на частоте 100 кГц,
показали, что плотность мощности шума в ближайшей боковой полосе (мощность на корень
квадратный из герц, измеренная на 100 Гц смещения от генерируемой частоты), ниже по крайней
мере на 85 дБ уровня основного колебания.
Рис. 4.14. Релаксационный генератор на КМОП ИС.
Иногда встречается аналогичная схема, но при перемене местами элементов R2Е и С. Хотя это
превосходный генератор, но он имеет более зашумленный выходной сигнал.
11
Рис. 4.15. Управляемый релаксационный генератор
Представленная на рис. 4.15 схема имеет более низкий уровень шума и, кроме того, имеется
возможность модулировать выходную частоту с помощью внешнего тока, прикладываемого к базе
транзистора T1. В этой схеме транзистор T1 функционирует как интегратор, вырабатывая на своем
коллекторе сигнал асимметричной треугольной формы. Сами же инверторы работают в качестве
неинвертирующего компаратора, изменяя полярность возбуждения на базе каждые полпериода. Эта
схема имеет плотность шума —90 дБ/Гц измеренную на частоте 100 Гц смещения от несущего
колебания 150 кГц, и —100 дБ/Гц. измеренную при смещении 300 Гц. Хотя эти схемы превосходны
в отношении уровня бокового шума, генерируемая частота имеет большую чувствительность к
колебаниям напряжения источника питания, чем другие рассмотренные в ранее генераторы.
На рис.4.16. приведены принципиальная схема (а) и временные диаграммы работы (б) ждущего
мультивибратора на логических микросхемах, реализующих функцию И-НЕ.
В исходном состоянии на выходе элемента Э1 имеем высокий уровень напряжения U1вых (логическую единицу), так как резистор подключен к нулевой шине и уровень напряжения на входе Э1
определяется падением напряжения на резисторе R UR = I0вых R от входного тока микросхемы.
Это падение напряжения должно быть меньше порогового напряжения Unopcx, Тогда при высоком
уровне напряжения U1вх на входе 1 микросхемы Э2Е на ее выходе создается низкий уровень
напряжения Uвых 2 = U0вых (логический нуль). При поступлении на вход 1 элемента Э2 напряжения
U0BX (момент времени t1) на ее выходе устанавливается уровень напряжения, соответствующий
логической единице. Возникший при переключении микросхемы Э2 скачок напряжения U1вых —
U0вых = U лог передается через конденсатор С на вход микросхемы Э1 и переключает ее в
состояние логического нуля, когда Uвых t = U°вых.
После момента времени t1 конденсатор С заряжается по экспоненте с постоянной времени =
12
RC, а напряжение ивх1 падает с той же постоянной.
Мультивибратор находится в квазиустойчивом состоянии.
Возвращение сигнала ивх на входе 1 микросхем Э2 к прежнему уровню (логической
единице) приводит к изменению ее состояния, так как на входе 2Е микросхемы после
момента времени t1 устанавливается логический нуль (U2Е = Uвых1 = U0 вых).
В момент времени t2Е, когда UBX 1 достигает порогового уровня напряжения Unopсх, происходит
переключение Э1 и соответственно Э2. Мультивибратор возвращается в исходное состояние.
Для предотвращения отрицательного выброса напряжения U вх1 в момент времени t2Е и
уменьшения таким образом времени восстановления исходного состояния схемы резистор R
шунтируют диодом VD
Длительность выходного импульса при R>>RlBых определяется из формулы
Одновибраторы позволяют из импульсов любой формы и длительности получить импульс,
имеющий строго постоянные длительности и величину.
Промышленность выпускает специальные микросхемы одновибраторов с расширенными
функциональными возможностями, например 155АГ1, 155АГЗ.
4.6. Таймеры
4.6.1. Таймер NE555
Таймерами называются устройства для точного задания временных интервалов. Таймеры
могут быть цифровыми и аналоговыми. В относительно простых электронных устройствах
применяются аналоговые таймеры.
Простую в эксплуатации ИМС, предназначенную для формирования точных интервалов
времени, многие фирмы пытались спроектировать еще в начале 60-х годов. Тогда использовались
всевозможные варианты классической транзисторной мультивибраторной схемы, точность работы
которой невелика. Мультивибраторы на ОУ и компараторах оказались непрактичными, поскольку
частота сигналов (или длительность отмеряемых интервалов времени) в таких схемах заметно
зависит от напряжения питания.
Прорывом в этом направлении явилось изобретение нескольких видов интегральных таймеров.
Первый интегральный таймер NE555 был разработан в 1972 г. фирмой Signetix (США). В
настоящее время эта схема считается классической. Функциональная схема таймера NE555
(отечественный аналог — 1006ВИ1) приведена на Рис. 4.17.
Рис. 4.17. Функциональная схема таймера NE555 (типовое включение в ждущем режиме)
Здесь таймер представлен в типовом включении для ждущего режима. Схема собственно
таймера выделена заливкой. Основой таймера является двухпороговый компаратор, включающий
два компаратора (KH1 и КН2) и RS-триггер, фиксирующий состояние выхода. Один из входов
каждого компаратора подключен к делителю напряжения, образованному резисторами R,
согласованными по величине с точностью не менее 2%. Напряжения на плечах делителя составляют 2Vs/3 и Vs/3 соответственно. Триггер управляет двухтактным, симметричным выходным
каскадом на транзисторах VT1 VT2, обеспечивающим выходной ток до 250 мА. Кроме того,
инверсный выход триггера управляет разрядным ключом на транзисторе VT3. Триггер имеет вход
13
разрешения Е, при подаче на который сигнала низкого уровня на выходе таймера также
устанавливается низкий уровень независимо от уровня сигнала на входе ViN.
На неинвертирующий вход компаратора KH1 (вывод 5), соединенный с верхней ступенью
делителя, при необходимости может быть подано опорное напряжение от внешнего источника.
Обычно между этим выводом и общей шиной включается конденсатор, сглаживающий помехи,
приходящие по цепи источника питания Ks.
4.6.2. Основные схемы включения таймера
Ждущий режим
Рис. 4.18. Временные диаграммы работы ждущего мультивибратора на таймере
Обратимся к рис. 4.18. В режиме ожидания входной сигнал VIN на выводе 2 «Пуск» имеет
высокий уровень (по крайней мере, больше, чем Vs/3). При этом выходное напряжение
компаратора соответствует лог. 1. Для инверсного входа S триггера этот уровень является неактивным. Напряжение Vc на времязадающем конденсаторе Ct близко к нулю, и выходное
напряжение компаратора КН1 приложенное к инверсному входу R триггера, также имеет уровень
лог. 1. Триггер находится в режиме хранения в состоянии Q = О. Транзистор VT1 закрыт, а VТ2 —
открыт. На выходе таймера — низкий уровень. Ключ VT3 замкнут и поддерживает конденсатор Сt,
в разряженном состоянии.
При отрицательном кратковременном перепаде входного сигнала VIN < Vs/3 (Рис. 4.32) на
выходе компаратора КН2 на время перепада установится логический нуль (активный уровень для
S-входа триггера) и триггер переключится в
состояние Q = 1.
Ключ VT3 при этом размыкается, и конденсатор Сt, начинает заряжаться через резистор Rt от
источника питания. Уравнение заряда конденсатора имеет вид
Импульс заканчивается по достижении напряжения Vc величины опорного напряжения VREF
При этом компаратор KH1 переключится и переведет триггер в первоначальное состояние. Ключ
VT3 замкнется и разрядит конденсатор. Длительность импульса определится из уравнения:
Решение этого уравнения при нулевых начальных условиях
из которого следует, что
Если в течение этого времени на вход придет еще один запускающий импульс, то триггер
останется в единичном состоянии, т. е. повторный запуск во время заряда конденсатора Сt,
игнорируется. Разряд времязадающего конденсатора происходит очень быстро, хотя и не
мгновенно. Если следующий запускающий импульс придет во время разряда конденсатора, то
длительность импульса таймера сократится. Это время, называемое временем релаксации, во
всяком случае, значительно меньше аналогичного времени ждущего мультивибратора на ОУ и
14
соизмеримо со временем релаксации одновибратора на компараторе.
Автоколебательный режим
Схема простейшего автоколебательного мультивибратора на таймере 1006ВИ1 приведена
на Рис. 4.19а.
Рис. 4.19. Автоколебательный мультивибратор на таймере: а — схема, б — временные
диаграммы
Когда потенциал на конденсаторе Сt, достигнет нижнего порога срабатывания таймера, на
входе S триггера установится низкий (активный) уровень. Триггер переключится в состояние лог.
1 и ключ VT3 разомкнётся. При этом начнется заряд конденсатора через два последовательно
включенных резистора Rt и R1. Напряжение на конденсаторе достигнет верхнего порога
срабатывания за время
Tи = (R1 + Rt)Сt ln2 0.693(R1 + Rt)Ct
При этом компаратор KH1 переключится, на входе R триггера установится низкий (активный)
уровень, триггер переключится в состояние Q = 0 и ключ VTз откроется. Конденсатор будет
разряжаться через резистор Rt до тех пор, пока напряжение на нем не достигнет нижнего порога
срабатывания таймера. Это произойдет за время
t2 = Rt Сt ln2.
Затем все процессы будут повторяться. Частота выходного напряжения мультивибратора
составит
Временные диаграммы работы автоколебательного мультивибратора представлены на Рис.
4.19б. При подаче сигнала низкого уровня на вход «Вкл.» (вывод 4) генерацию можно остановить.
Некоторым недостатком схемы на Рис. 4.19а является разность длительностей импульса и паузы,
которая в данной схеме не может быть устранена. Действительно, коэффициент заполнения этой
схемы определяется соотношением
Эта величина составит 0.5 только в случае, если R1 = 0. Это недопустимо, так как приведет к
короткому замыканию источника при открытом ключе VT3.
Рис. 4.20. Схема автоколебательного мультивибратора с независимой установкой длительности
и частоты импульсов
На Рис. 4.20 приведена схема, которая способна обеспечить генерацию импульсов с 0 < < 1.
Для этого параллельно резистору Rt включен диод VD1. Конденсатор Ct в такой схеме
15
заряжается через резистор Rе и открытый диод VD1 а разряжается, как и в базовой схеме, через Rt.
Чтобы уменьшить влияние диода VD1 на точность формирования временных интервалов, последовательно с резистором Rt включен диод VD2, согласованный по параметрам с диодом VD1. При
этом за счет падения напряжения на диодах временные интервалы t1 и t2 будут несколько больше,
чем у базовой схемы (Рис. 4.19а).
Относительная длительность импульсов этой схемы определится соотношением
Мультивибратор, генерирующий импульсы с =0.5, можно построить и другим путем:
используя выходные транзисторы таймера для заряда и разряда времязадающего конденсатора.
4.6.3. Типы интегральных таймеров
Массовое применение таймеров в аппаратуре, разнообразие решаемых ими задач и,
следовательно, многообразие требований, предъявляемых к их параметрам в зависимости от типа
аппаратуры и выполняемых функций, обусловило создание обширного семейства интегральных
таймеров.
Интегральные таймеры классифицируются по следующим признакам:
• внутренняя схемотехника и технология — биполярные и КМОП;
• число тактов мультивибратора на формируемом интервале времени — однотактные и многотактные.
Рассмотренный выше таймер NE555 выполнен по биполярной технологии. Он потребляет от
источника сравнительно большой ток (10 мА). Входные токи его также сравнительно велики (0.5
мкА). Последнее обстоятельство существенно затрудняет построение таймеров, способных
формировать большие задержки времени. Ток заряда времязадающего конденсатора Iс зависит от
номинала резистора Rt и напряжения питания Vs. Минимальная величина этого тока достигается в
конце формируемого интервала времени и составляет
IC_MIN = (Vs/3Rt).
Для обеспечения высокой точности отсчета интервала времени следует обеспечивать Iс MIN >
50I1N, где IIN — входной ток таймера. Для таймера NE555 максимальная величина сопротивления
резистора Rt при VS=15B составит 200 кОм. При емкости времязадающего конденсатора Ct= 1 мкФ
максимальная длительность импульса согласно (4.42) не превысит 0.22 с.
В конце 70-х годов фирма Intersil разработала ИМС ICM7555, представляющую собой КМОПвариант таймера NE555. Этот таймер, сохранив почти полностью функциональную схему и даже
назначение выводов своего биполярного прототипа, потребляет от источника питания всего 0.12
мА (при Vs= 15B). Входные токи этой микросхемы не превышают 50 пА. Это дает возможность в
условиях, рассмотренных выше для таймера NE555, получить максимальную длительность
импульса 2200 с (~ 37 мин) при сопротивлении времязадающего резистора Rt = 2 ГОм.
Недостатком КМ ОП-варианта является меньшая нагрузочная способность.
Многотактные таймеры применяются, если требуется обеспечить длительность импульса,
измеряемую часами. В принципе большую длительность можно получить, используя с
однотактным таймером времязадающий конденсатор большой емкости (десятки или сотни мкФ).
Однако конденсатор такой емкости с высококачественным диэлектриком занимает много места и
дорого стоит. Блок-схема многотактного таймера приведена на Рис. 4.21.
Многотактный таймер умножает постоянную времени RtCt-цепи на коэффициент пересчета
счетчика. Семейство многотактных таймеров делится на две группы. К первой группе относятся
программируемые таймеры, в которых формируемый интервал времени задается программно,
установкой соответствующих перемычек на выводах счетчика, либо цифровым кодом от ЭВМ. Ко
второй группе относятся специализированные таймеры со встроенными счетчиками, у которых
однозначно задан коэффициент пересчета.
16
Рис. 4.21. Блок-схема многотактного таймера
В Табл. 4.1 приведены основные характеристики нескольких моделей аналоговых таймеров.
4.7. Блокинг-генератор
Генераторы коротких импульсов, у которых вершина имеет форму, близкую к
колоколообразной, выполняют на основе блокинг-генераторов. Они представляют собой
мультивибраторы, в которых положительная обратная связь введена через импульсный
трансформатор.
Блокинг-генератор представляет собой релаксационную схему с трансформаторной обратной
связью, выполненную на одном активном элементе. По сравнению с мультивибраторами и одно
вибраторами блокинг-генераторы позволяют получить большую скважность и меньшую
длительность импульсов, а также осуществить трансформаторную связь с нагрузкой
В транзисторных блокинг-генераторах транзистор может быть включен как по схеме ОБ, так и
по схеме ОЭ, кроме того, используется несколько вариантов включения времязадающего
конденсатора, нагрузки и т. п. Мы подробно рассмотрим основную схему (рис. 4.22), поскольку
полученные выводы действительны в общем и для других вариантов.
Схема блокинг-генератора, работающего в режиме автоколебаний, показана на рис. 4.22. Пусть
сначала на конденсаторе С напряжение имеет положительную полярность (показанную на рис.
4.22, а) и достаточно большое значение. Тогда транзистор находится в запертом состоянии и
17
конденсатор разряжается через R и вторичную обмотку трансформатора. Индуктивностью
последней можно пренебречь, так как скорость изменения тока на этом этапе невелика. Строго
говоря, разряд происходит не только через R, но и через цепь базы. Когда напряжение на
конденсаторе, стремящееся к отрицательному уровню - Еб, падает до нуля, транзистор отпирается и
начинается второй этап переходного процесса. На этом этапе возрастающий коллекторный ток
наводит на вторичной обмотке трансформатора э.д.с. отрицательной полярности, которая
способствует форсированному отпиранию транзистора. Процесс развивается лавинообразно вплоть
до насыщения транзистора, когда последний утрачивает усилительные свойства и положительная
обратная связь нарушается. Коллекторное напряжение в течение второго этапа падает от величины
-Ек практически до нуля. На третьем этапе происходит рассасывание накопленных в базе носитечей.
При этом напряжение Uкэ остается близким к нулю, т. е. формируется вершина импульса. Через
некоторое время заряд неосновных носителей в базе уменьшается до такой величины, при которой
транзистор выходит из насыщения. После этого наступает этап запирания, в течение которого
коллекторный ток лавинообразно падает до нуля, а коллекторное напряжение снова достигает
значения —Ек. Затем получается выброс, обусловленный рассеянием магнитной энергии,
накопленной в сердечнике трансформатора. По окончании выброса схема возвращается в исходное
состояние и рассмотренный цикл повторяется.
То положительное напряжение на конденсаторе, которое мы предположили в начале цикла,
получается в процессе формирования вершины, когда через конденсатор протекает большой базовый
ток. Фронты импульса обычно бывают короткими, и напряжение Uc за время фронта практически не
меняется.
Ж д у щ и й р е ж и м блокинг-генератора обеспечивается включением запирающего напряжения
в цепь базы последовательно с резистором R (рис. 4.23). В этом случае до подачи отрицательного
спускового импульса транзистор будет находиться в запертом состоянии, а напряжение на
конденсаторе будет равно напряжению смещения Ек. После подачи спускового импульса начнется
описанный выше цикл, в конце которого восстановится исходное состояние.
Поскольку в ждущем режиме длительность паузы задается периодом спусковых импульсов,
сопротивление R выбирают достаточно малым, с тем чтобы разряд конденсатора заканчивался до прихода очередного импульса.
Сопротивление R должно быть значительно меньше сопротивления утечки транзистора (на
практике – не более 50 кОм). В отсутствие смещения стабильность блокинг-генератора весьма
низка, практически такая схема неработоспособна. Т.к. наличие второго напряжения неудобно, то
на практике зачастую сопротивление подключают к шине источника питания.
Интервал между импульсами определяется временем разряда конденсатора. В идеале можно
считать
Тп = RC ln (Uсм/Еб +1).
Если за время импульса заряд конденсатора заканчивается, то можно считать Ucm = nбEк.
Время фронат и спада импульсов определяются параметрами транзистора и трансформатора, а
также сопротивлением нагрузки. Расчет этого времени весьма сложен. (Обычное время на
практике – десятки нс для высокочастотных транзисторов).
Время импульса находится в прямой зависимости от С и индуктивности коллекторной
обмотки, а также от сопротивления нагрузки. Расчет также весьма трудоемок.
Отрицательный выброс – весьма неприятная особенность блоктнг-генератора, как для
последующих каскадов, так и для самого устройства (транзистор может быть пробит выбросом
18
как коллекторного, так и базового напряжения)
Uкб макс = - (Ек+Uкm)(1+nб)
Uэб макс = - nб(Ек+Uкm)
Например при выбросе 7,5 В (обычная цифра), напряжении питания 10 В и к-те трансформации
0,2 получим Uэб макс = -4 В, что превышает напряжение пробоя для многих транзисторов. Для
защиты базы вводят диод в базовую цепь, либо шунтируют коллекторную обмотку диодом, или
цепочкой диод-резистор.
4.8. Генераторы линейно изменяющихся напряжений
Генераторы линейно изменяющихся напряжений (ГЛИН)л формируют напряжения
пилообразной формы (см. рис. 4.24, а). Для создания линейной зависимости напряжения от
времени чаще всего используют заряд (или разряд) конденсатора постоянным током.
Простейшая схема ГЛИН приведена на рис. 4.24, а, временные диаграммы напряжений в
схеме — на рис. 5.5,б. При разомкнутом ключе Кл конденсатор С заряжается от источника тока I и
напряжение на нем нарастает:
где t=0 — момент начала заряда.
В момент t=t1 замыкается ключ Кл и конденсатор экспоненциально разряжается через ключ и
резистор R который введен в схему для ограничения разрядного тока. После разряда конденсатора
до напряжения Uс(0)=0 ключ Кл может быть разомкнут, тогда начнется вновь процесс
формирования линейно нарастающего напряжения.
Известны многочисленные варианты схемы рис. 4.24, а, отличающиеся способами построения
источника тока I и ключевого элемента. Большими технико-экономическими преимуществами
обладают схемы ГЛИН, построенные на ИМС. Среди них широкое распространение получили
схемы на ОУ.
В схеме интегратора, конденсатор заряжается постоянным током, если на вход интегратора
подано постоянное напряжение. При подаче на вход UBX*>0 напряжение на выходе уменьшается
по линейному закону:
При uвх=—UBx* выходное напряжение нарастает также по линейному закону:
На рис, 4.25, а приведена схема ГЛИН с внешним управлением (Uy — управляющее
напряжение) и временные диаграммы напряжений. Схема состоит из компаратора и интегратора.
Длительность tи входного положительного импульса Uy определяет длительность стадии спада
выходного напряжения uГЛИн (рис. 4.25,6), длительность стадии нарастания UГлин равна паузе tп
между импульсами Uy.
19
При поступлении входного напряжения, амплитуда которого Uym>E0, компаратор переходит в
состояние положительного насыщения u'=UBblXmax. Открывается диод V1, и напряжение uГлин
убывает по линейному закону; в (3.19) подставим R=R1. Крутизна напряжения uглин на интервале
спада t1-t2Е:
Sc = dUглин/dt = - Uвыхmax/R1 С.
При прекращении импульса uy компаратор под воздействием напряжения Eо на
инвертирующем входе переходит в состояние отрицательного насыщения U' =- Uвыхmax.
Открывается диод V2Е и интегратор формирует линейно нарастающее напряжение, в (3.20)
подставим R=R2. Крутизна нарастания uГЛИн на интервале t2Е—tз
SН = dUглин/dt = Uвыхмах/R2Е С.
ГЛИН с внешним управлением имеет важную принципиальную особенность. Установившийся
режим достигается только в том случае, если равны UГЛИн на этапах нарастания или спада, в
противном случае среднее значение выходного напряжения начинает нарастать (или убывать), что
в конечном счете приводит к насыщению ОУ интегратора. Условие устойчивой работы ГЛИН
сводится к требованию
-tиSc = tnSн.
Учитывая возможную нестабильность крутизны и длительностей tи и tn, ориентироваться на
выполнение последнего условияв схеме рис. 4.25,а нереально. В практических схемах
максимальное и минимальное значения напряжения uглин ограничиваются. В схеме рис. 4.25, а
для ограничения uглин введены стабилитроны V3 и V4. Напряжение между входами ОУ
интегратора u0. При 0<Uглин<U+ на стабилитроне V4 действует прямое напряжение Uav40,
стабилитрон V3 смещен в обратном направлении и через цепочку стабилитронов протекает малый
ток I00. Таким образом, стабилитроны в этом случае практически не влияют на процесс разряда
конденсаторов. При достижении uГлин=U+= |UСТVЗ| (где Ucтv3 - напряжение стабилизации V3) V3
работает в режиме электрического пробоя, разряд конденсатора С прекращается и ток i0c = u'/R1
переходит с конденсатора на цепочку стабилитронов. Таким образом, напряжение uГлин сверху
ограничено значением U+. Аналогично снизу напряжение uглин ограничено значением U-= - |UСТV4
| , где Uстv4—напряжение стабилизации V4.
На рис. 4.25,б справа показана работа стабилитронного ограничителя в момент t5. Интервал
паузы t4—t6 задан достаточно большим, поэтому в момент t5 напряжение ГЛИН достигает
значения U+. С приходом очередного импульса uу начинается процесс формирования спада.
Помимо ГЛИН с внешним управлением часто применяются ГЛИН, работающие в
20
а в т о г е н е р а т о р н о м режиме, т .е. без управляющего сигнала. Широкое распространение
получила схема ГЛИН на ОУ (рис. 4.26). Эта схема отличается от рассмотренного ГЛИН
наличием цепи ОС R3R4, которая связывает прямой вход компаратора с выходами компаратора и
интегратора.
Найдем напряжение иос методом суперпозиции: иос= = u1+u2. Напряжение u1 находим при
uГлин=0. а напряжение u2 при и'=0. Получим
Временные диаграммы напряжений в схеме рис. 4.26, а приведены на рис. 4.26,6. Начнем
рассмотрение в момент t1, когда компаратор переходит в состояние отрицательного насыщения и'
= —UBыXmax. При этом открывается диод V2Е, и на интеграторе начинается процесс формирования
нарастающего напряжения uГЛин. Напряжение uос на интервале t1—t2 также линейно нарастает.
Для момента t2Е получим
В этот момент t2Е компаратор переключается, напряжение на его выходе скачком изменяется до
значения и'= = ивЫхтах. Скачком изменяется и напряжение иос. Процесс переключения компаратора
развивается регенеративно за счет ПОС через резистор R4.
На интервале t2Е—t3 открыт диод V1. Интегратор формирует линейно убывающее напряжение
uглин. Напряжение иос также линейно убывает и при t=t3 выражение сводится к виду
Компаратор вновь регенеративно переключается, начинается формирование линейно
нарастающего участка Uглин и т. д.
Схема рис. 4.26 может быть использована также и в качестве мультивибратора, в этом случае
выходное напряжение снимается с выхода компаратора.
ГЛИН находят очень широкое применение в технике. На их основе строятся системы
развертки электронно-лучевых приборов. Применяются они и при создании АЦП.
Разряд конденсатора С должен происходить за малый промежуток времени (время
восстановления Тв). На рис. 4.27,6 приведена схема ГЛИН. В ней резистор заменен на источник
постоянного тока, выполненный на ОУ DA1 и транзисторе VT1.
Для нормальной работы источника постоянного тока необходимо, чтобы UCT2 было
больше -Un на 1,5—2 В. Это требование вызвано тем, что для нормальной работы источника
постоянного тока транзистор VT1 должен находиться в активном режиме.
Генераторы напряжения треугольной формы. Эти генераторы отличаются от рассмотренных только
тем, что у них как зарядка, так и разрядка конденсатора осуществляются токами, значения
которых неизменны. Так, например, если в схеме ГЛИН конденсатор С перезаряжать токами
неизменных значений, а выходное напряжение снимать непосредственно с конденсатора, то
получим генератор напряжения треугольной формы. Схема подобного генератора напряжения
треугольной формы приведена на рис. 4.27, в, а диаграмма выходного напряжения — на рис. 4.27,
г. В нее включены транзисторы VT1, VT2, выполняющие роль генераторов токов. При грубой
21
оценке можно считать, что токи коллекторов транзисторов VT1 и VT2
где UБЭ1, UБЭ2 -напряжение база — эмиттер у транзисторов.
Транзистор VT1 открыт при положительном напряжении на выходе компаратора на ОУ
(U+выхmах), а транзистор VT2 — при отрицательной полярности этого напряжения (U-выхmах).
Генераторы ступенчато изменяющегося напряжения. Такие генераторы выполняют на основе
цифро-аналоговых преобразователей.
4.9. Генератор прямоугольного и треугольного напряжений
В схеме мультивибратора формируется напряжение не только прямоугольной формы, но и
формы, близкой к треугольной (на конденсаторе). Времязадающая RC-цепь мультивибратора
выполняет приближенное интегрирование выходных прямоугольных колебаний. Заменив эту цепь
интегратором на ОУ, получим генератор, на одном из выходов которого формируются
прямоугольные, а на другом – треугольные колебания (рис. 4.28). Здесь на усилителе ОУ1
выполнен неинвертирующий триггер Шмитта, а на ОУ2 – интегратор.
Рис. 4.28. Схема генератора прямоугольных и треугольных колебаний
Интегратор интегрирует постоянное напряжение, имеющееся на выходе триггера Шмитта.
Когда выходное напряжение интегратора достигает порога срабатывания триггера Шмитта,
напряжение на его выходе U1 скачком меняет свой знак. Вследствие этого напряжение на выходе
интегратора начинает изменяться в противоположную сторону, пока не достигнет другого порога
срабатывания триггера Шмитта. Изменяя постоянную интегрирования RC, можно перестраивать
частоту формируемого напряжения в широком диапазоне. Амплитуда треугольного напряжения
U2 зависит только от установки уровня срабатывания триггера Шмитта Uп, который для данной
схемы включения триггера составляет UМR1/R2 (UМ – по- прежнему напряжение насыщения ОУ).
Таким образом, частота формируемого напряжения не зависит от уровня напряжения насыщения
операционного усилителя.
4.10. Генераторы, управляемые напряжением
Большое количество ИС генераторов выпускаются в виде генераторов, управляемых
напряжением (ГУН), у которых выходной сигнал изменяется в некотором диапазоне в
соответствии с управляющим входным напряжением. Некоторые из этих схем имеют частотные
диапазоны, превосходящие 1000:1. Примерами таких схем являются исходная ИС NE566 и более
новые ИС: LM331, 8038, 2206 и серии 74LS624-9. Схемы серии 74LS624, например, способны
работать на высоких частотах вплоть до 20 МГц, требуют внешней RC-цепи для установления
номинальной частоты и формируют выходные сигналы с обычными логическими уровнями. Более
быстродействующие схемы ГУН, такие как 1648, могут функционировать в диапазоне до 200
МГц. Схема LM331 фактически представляет собой пример преобразователя напряжение-частота
22
(U/F-преобразователь) с хорошей линейностью. В тех же случаях, когда линейность является
определяющим фактором, предпочтительны современные U/F преобразователи типа AD650, обеспечивающие линейность 0,005%. В большинстве схем ГУН используются внутренние источники
тока для формирования треугольных импульсов, а схемы 8038 и 2206 даже имеют набор «мягких»
клемм для преобразования с помощью ограничителя треугольных импульсов в гармонические
колебания. Иногда в ИС ГУН используются неудобные значения опорного напряжения в качестве
сигнала управления (например, положительный источник питания) и усложненные симметрированные схемы для получения синусоидального сигнала. Ко многим из этих ИС могут
подключаться внешние кварцевые резонаторы для повышения их точности и стабильности; в таких случаях кварцевый резонатор просто устанавливается вместо конденсатора. На рис. 4.29
показана схема ГУН с диапазоном выходного сигнала от 10 Гц до 10 кГц, построенная на основе
схемы LM331
При обзоре интегральных схем ГУН нельзя не обратить внимание на ИС фазовой
автоматической подстройки частоты (ФАПЧ), в состав которых входят ГУН и фазовый детектор.
Например, популярна КМОП-схема 4046 (и ее более быстродействующий аналог 74НС4046).
23
Запоминающие устройства
Основные сведения.
Система параметров. Классификация
Запоминающие устройства (ЗУ) служат для хранения информации и обмена ею с другими
ЦУ. Микросхемы памяти в общем объеме выпуска ИС занимают около 40% и играют
важнейшую роль во многих системах различного назначения. Микросхемы и системы памяти
постоянно совершенствуются как в области схемотехнологии, так и в области развития новых
архитектур. В настоящее время созданы и используются десятки различных типов ЗУ
Важнейшие параметры ЗУ находятся в противоречии. Так, например, большая
информационная емкость не сочетается с высоким быстродействием, а быстродействие в свою
очередь не сочетается с низкой стоимостью. Поэтому системам памяти свойственна
многоступенчатая иерархическая структура, и в зависимости от роли того или иного ЗУ его
реализация может быть существенно различной.
В наиболее развитой иерархии памяти ЭВМ можно выделить следующие уровни:
1) регистровые ЗУ, находящиеся в составе процессора или других устройств (т. е.
внутренние для этих блоков), благодаря которым уменьшается число обращений к другим
уровням памяти, реализованным вне процессора и требующим большего времени для операций
обмена информацией;
2) кэш-память, служащая для хранения копий информации, используемой в текущих
операциях обмена. Высокое быстродействие кэш-памяти повышает производительность ЭВМ;
3) основная память (оперативная, постоянная, полу постоянная), работающая в режиме
непосредственного обмена с процессором и по возможности согласованная с ним по
быстродействию. Исполняемый в текущий момент фрагмент программы обязательно находится
в основной памяти;
4) специализированные виды памяти, характерные для некоторых специфических
архитектур (многопортовые, ассоциативные, видеопамять и др.);
5) внешняя память, хранящая большие объемы информации. Эта память обычно
реализуется на основе устройств с подвижным носителем информации (магнитные и
оптические диски, магнитные ленты и др.)
Важнейшие параметры ЗУ
Информационная емкость — максимально возможный объем хранимой информации.
Выражается в битах или словах (в частности, в байтах). Бит хранится запоминающим
элементом (ЗЭ), а слово — запоминающей ячейкой (ЗЯ). т. е. группой ЗЭ, к которым возможно
лишь одновременное обращение. Добавление к единице измерения множителя "К" (кило)
означает умножение на 210= 1024, а множителя "М" (мега) — умножение на 2 20 — 1048576.
Организация ЗУ — произведение числа хранимых слов на их разрядность. Видно, что это дает
информационную емкость ЗУ, однако при одной и той же информационной емкости
организация ЗУ может быть различной, так что организация является самостоятельным важным
параметром.
Быстродействие (производительность) ЗУ оценивают временами считывания, записи и
длительностями циклов чтения/записи. Время считывания — интервал между моментами
появления сигнала чтения и слова на выходе ЗУ Время записи — интервал после появления
сигнала записи, достаточный для установления ЗЯ в состояние, задаваемое входным словом.
Минимально допустимый интервал между последовательными чтениями или записями
образует соответствующий цикл. Длительности циклов могут превышать времена чтения или
записи, т. к. после этих операций может потребоваться время для восстановления необходимого
начального состояния ЗУ. Время чтения, записи и длительности циклов — традиционные
параметры. Для некоторых современных ЗУ они должны быть дополнены новыми. Причиной
является более сложный характер доступа к хранимым данным, когда обращение к первому
слову некоторой группы слов (пакета) требует большего времени, чем обращение к
последующим. Для таких режимов вводят параметр времени доступа при первом обращении
(Latency) и темпа передач для последующих слов пакета (Bandwidth). Темп передач в свою
очередь оценивается двумя значениями — предельным (внутри пакета) и усредненным (с
учетом Latency). С уменьшением пакета усредненный темп снижается, все более отличаясь от
предельного.
Помимо указанных основных параметров для ЗУ указывают еще целый набор временных
интервалов. Перечисленные выше динамические параметры являются эксплуатационными
(измеряемыми). Кроме них, существует ряд режимных параметров, обеспечение которых
необходимо для нормального функционирования ЗУ, поскольку оно имеет несколько сигналов
управления, для которых должно быть обеспечено определенное взаимное расположение во
времени. Для этих сигналов задаются длительности и ограничения по взаимному положению во
времени.
Один из возможных наборов сигналов ЗУ (рис. 4.1, а) включает следующие сигналы:
А— адрес, разрядность которого n определяется числом ячеек ЗУ, т. е. максимально
возможным числом хранимых в ЗУ слов. Для ЗУ типично число ячеек, выражаемое целой
степенью двойки. Адрес является номером ячейки, к которой идет обращение. Очевидно, что
разрядность адреса связана с числом хранимых слов N соотношением n = log2N (имеется в виду
максимально возможное число хранимых слов). Например, ЗУ с информационной емкостью
64К слов имеет 16-разрядные адреса, выражаемые словами
А = A15A14A13...Ao;
CS — (Chip Select) или СЕ (Chip Enable), который разрешает или запрещает работу данной
микросхемы;
R/W — (Read/Write) задает выполняемую операцию (при единичном значении — чтение,
при нулевом — запись);
DI и DO (Data Input) и (Data Output) — шины входных и выходных данных, разрядность
которых m определяется организацией ЗУ (разрядностью его ячеек). В некоторых ЗУ эти
линии объединены.
Требования к взаимному временному положению двух сигналов (А и В) задаются
временами предустановки, удержания и сохранения.
Время предустановки сигнала А относительно сигнала В tsu(А-В) есть интервал между
началами обоих сигналов.
Время удержания tH (А- B) - это интервал между началом сигнала А и окончанием сигнала В.
Время сохранения tv (A -B)- интервал между окончанием сигнала А и окончанием сигнала В.
Длительности сигналов обозначаются как tw (индекс от слова Width — ширина).
Для ЗУ характерна такая последовательность сигналов. Прежде всего подается адрес, чтобы
последующие операции не коснулись какой-либо другой ячейки, кроме выбранной. Затем
разрешается работа микросхемы сигналом CS (CF) и подается строб чтения Записи R/W
(взаимное положение сигналов CS и R/W для разных ЗУ может быть различным). Если задана,
например, операция чтения, то после подачи перечисленных сигналов ЗУ готовит данные для
чтения, что требует определенного времени. Задний фронт сигнала R/W, положение которого
во времени должно обеспечивать установление правильных данных на выходе ЗУ, считывает
данные.
Пример временной диаграммы для рассмотренного набора cигналов ЗУ и операции чтения
приведен на рис. 4.1, 6.
Индексом А (от слова Access) обозначаются согласно стандарту времена доступа —
интервалы времени от появления того или иного управляющего сигнала до появления
информационного сигнала на выходе. Время доступа относительно сигнала адреса
обозначается, если следовать правилу, как tA(A), но часто просто как tA. Аналогично этому,
время доступа относительно сигнала CS, т. е. tA(cs) часто обозначается просто как tсs- Время tA
называют также временем выборки, а время tcs — временем выбора.
Кроме отмеченных параметров для ЗУ используется и ряд других (уровни напряжений,
токи, емкости выводок, температурный диапазон и т. д.), которые не требуют специального
рассмотрения, т. к. они традиционны для цифровой схемотехники. Исключение составлявляет
свойство энергонезависимости, т.е. способности ЗУ сохранять данные при отключении
напряжения питания. Энергонезависимость может быть естественной, т.е. присущей самим ЗЭ,
или искусственной, достигаемой введением резервных источников питания, автоматически
подключаемых к накопителю ЗУ при снятии основного питания.
Классификация ЗУ
Для классификации ЗУ (рис. 4.2) важнейшим признаком является способ доступа к данным.
При адресном доступе код на адресном входе указывает ячейку, с которой ведется обмен.
Все ячейки адресной памяти в момент обращения равнодоступны. Эти ЗУ наиболее
разработаны, и другие виды памяти часто строят на основе адресной с соответствующими
модификациями.
Адресные ЗУ делятся на RAM (Random Access Memory) и ROM (Read-Only Memory).
Русские синонимы термина RAM: ОЗУ (оперативные ЗУ) или ЗУПВ (ЗУ с произвольной
выборкой). Оперативные ЗУ хранят данные, участвующие в обмене при исполнении текущей
программы, которые могут быть изменены в произвольный момент времени. Запоминающие
элементы ОЗУ, как правило, не обладают энергонезависимостью.
В ROM (русский эквивалент — ПЗУ, т. е. постоянные ЗУ) содержимое либо вообще не
изменяется, либо изменяется, но редко и в специальном режиме. Для рабочего режима это
"память только для чтения".
RAM делятся на статические и динамические. В первом варианте запоминающими
элементами являются триггеры, сохраняющие свое состояние, пока схема находится пол
питанием и нет новой записи данных. Во втором варианте данные хранятся в виде зарядов
конденсаторов, образуемых элементами МОП-структур. Саморазряд конденсаторов ведет к
разрушению данных, поэтому они должны периодически (каждые несколько миллисекунд)
регенерироваться. В то же время плотность упаковки динамических элементов памяти в
несколько раз превышает плотность упаковки, достижимую в статических RAM.
Регенерация данных в динамических ЗУ осуществляется с помощью специальных
контроллеров. Разработаны также ЗУ с динамическими запоминающими элементами, имеющие
внутреннюю встроенную систему регенерации, у которых внешнее поведение относительно
управляющих сигналов становится аналогичным поведению статических ЗУ. Такие ЗУ
называют квазистатическими.
Статические ЗУ называются SRAM (Static RAM), а динамические — DRAM (Dynamic
RAM).
Статические ОЗУ можно разделить на асинхронные, тактируемые и синхронные
(конвейерные). В асинхронных сигналы управления могут задаваться как импульсами, так и
уровнями. Например, сигнал разрешения работы CS может оставаться неизменным и
разрешающим на протяжении многих циклов обращения к памяти. В тактируемых ЗУ
некоторые сигналы обязательно должны быть импульсными, например, сигнал разрешения
работы СS и каждом цикле обращения к памяти должен переходить из пассивного состояния в
активное (должен формироваться фронт этого сигнала в каждом цикле). Этот тип ЗУ называют
часто синхронным. Здесь использован термин "тактируемые", чтобы "освободить" термин
"синхронные" для новых типов ЗУ, в которых организован конвейерный тракт передачи
данных, синхронизируемый от тактовой системы процессора, что дает повышение темпа
передач данных в несколько раз.
Динамические ЗУ характеризуются наибольшей информационной емкостью и невысокой
стоимостью, поэтому именно они используются как основная память ЭВМ. Поскольку от этой
памяти требуется высокое быстродействие, разработаны многочисленные архитектуры
повышенного быстродействия, перечисленные в классификации.
Статические ЗУ в 4...5 раз дороже динамических и приблизительно во столько же раз
меньше по информационной емкости. Их достоинством является высокое быстродействие, а
типичной областью использования — схемы кэш-памяти.
Постоянная память типа ROM (М) программируется при изготовлении методами
интегральной технологии с помощью одной из используемых при этом масок. В русском языке
ее можно назвать памятью типа ПЗУМ (ПЗУ масочные). Для потребителя это в полном смысле
слова постоянная память, т. к. изменить ее содержимое он не может.
В следующих трех разновидностях ROM в обозначениях присутствует буква Р (от
Programmable). Это программируемая пользователем память (в русской терминологии ППЗУ—
программируемые ПЗУ). Ее содержимое записывается либо однократно (в PROM), либо может
быть заменено путем стирания старой информации и записи новой (в EPROM и EEPROM). В
EPROM стирание выполняется с помощью облучения кристалла ультрафиолетовыми лучами,
ее русское название РПЗУ-УФ (репрограммируемое ПЗУ с УФ-стиранием). В EEPROM
стирание производится электрическими сигналами, ее русское название РПЗУ-ЭС
(репрограммируемое
ПЗУ
с
электрическим
стиранием).
Английские
названия
расшифровываются как Electrically Programmable ROM и Electrically Erasable Programmable
ROM. Программирование PROM и репрограммирование EPROM и EEPROM производятся в
обычных лабораторных условиях с помощью либо специальных программаторов, либо
специальных режимов без специальных приборов (для EEPROM).
Память типа Flash по запоминающему элементу подобна памяти типа EEPROM (или иначе
2
E PROM), но имеет структурные и технологические особенности, позволяющие выделить ее в
отдельный вид.
Запись данных и для EPROM и для E2PROM производится электрическими сигналами
В ЗУ с последовательным доступом записываемые данные образуют некоторую очередь.
Считывание происходит из очереди слово за словом либо в порядке записи, либо в обратном
порядке. Моделью такого ЗУ является последовательная цепочка запоминающих элементов, в
которой данные передаются между соседними элементами.
Прямой порядок считывания имеет место в буферах FIFO с дисциплиной "первый пришел первый вышел" (First in — First Out), а также в файловых и циклических ЗУ.
Разница между памятью FIFO и файловым ЗУ состоит в том, что в FIFO запись в пустой
буфер сразу же становится доступной для чтения, т. е. поступает в конец цепочки (модели ЗУ).
В файловых ЗУ данные поступают в начало цепочки и появляются на выходе после некоторого
числа обращений, равного числу элементов в цепочке. При независимости операций считывания и записи фактическое расположение данных в ЗУ на момент считывания не связано с
каким-либо внешним признаком. Поэтому записываемые данные объединяют в блоки,
обрамляемые специальными символами конца и начала (файлы). Прием данных из файлового
ЗУ начинается после обнаружения приемником символа начала блока.
В циклических ЗУ слова доступны одно за другим с постоянным периодом, определяемым
емкостью памяти. К такому типу среди полупроводниковых ЗУ относится видеопамять
(VRAM).
Считывание в обратном порядке свойственно стековым ЗУ, для которых реализуется
дисциплина "последний пришел — первый вышел". Такие ЗУ называют буферами LIFO (Last In
— First Out).
Время доступа к конкретной единице хранимой информации в последовательных ЗУ
представляет собою случайную величину. В наихудшем случае для такого доступа может
потребоваться просмотр всего объема хранимых данных.
Ассоциативный доступ реализует поиск информации но некоторому признаку, а не по ее
расположению в памяти (адресу или месту в очереди) В наиболее полной версии все хранимые
в памяти слова одновременно проверяются на соответствие признаку, например, на совпадение
определенных полей слов (тегов — от английского слова tag) с признаком, задаваемым
входным словом (теговым адресом). На выход выдаются слова, удовлетворяющие признаку.
Дисциплина выдачи слов, если тегу удовлетворяют несколько слов, а также дисциплина записи
новых данных могут быть разными Основная область применения ассоциативной памяти в
современных ЭВМ кэширование данных.
Технико-экономические параметры ЗУ существенно зависят or их схемотехнологической
реализации По этому признаку также возможна классификация ЗУ, однако удобнее
рассматривать этот вопрос применительно к отдельным типам памяти.
Основные структуры запоминающих устройств
Адресные ЗУ представлены в классификации статическими и динамическими оперативными
устройствами и памятью типа ROM. Многочисленные варианты этих ЗУ имеют много общего с
точки зрения структурных схем что делает более рациональным не конкретное рассмотрение
каждого ЗУ в полном объеме, а изучение некоторых обобщенных структур с последующим
описанием запоминающих элементов для различных ЗУ. Общность структур особенно
проявляется для статических ОЗУ и памяти типа ROM. Структуры динамических ОЗУ имеют
свою специфику и будут рассмотрены позже. Для статических ОЗУ и памяти типа ROM
наиболее характерны структуры 2D, 3D и 2DM
Структура 2DD
В структуре 2D (рис. 4.3) запоминающие элементы ЗЭ организованы в прямоугольную
матрицу размерностью М = k*m, где М — информационная емкость памяти в битах; k - число
хранимых слов; m — их разрядность.
Дешифратор адресного кода DC при наличии разрешающего сигнала CS (Chip Select —
сигнала выбора микросхемы) активизирует одну из выходных линий, разрешая одновременный
доступ ко всем элементам выбранной строки, хранящей слово, адрес которого соответствует
номеру строки. Элементы одного столбца соединены вертикальной линией — внутренней
линией данных (разрядной линией, линией записи/считывания). Элементы столбца хранят
одноименные биты всех слов. Направление обмена определяется усилителями чтения/записи
под воздействием сигнала R/W (Read —чтение, Write — запись)
Структура типа 2D применяется лишь в ЗУ малой информационной емкости, т. к. при росте
емкости проявляется несколько ее недостатков, наиболее очевидным из которых является
чрезмерное усложнение дешифратора адреса (число выходов дешифратора равно числу
хранимых слов).
Структура 3DD
Структура 3D позволяет резко упростить дешифраторы адреса с помощью
двухкоординатной выборки запоминающих элементов. Принцип двухкоординатной выборки
поясняется (рис. 4.4, а) на примере ЗУ типа ROM, реализующего только операции чтения
данных.
Здесь код адреса разрядностью п делится на две половины, каждая из которых декодируется
отдельно. Выбирается запоминающий элемент, находящийся на пересечении активных линий
выходов обоих дешифраторов. Таких пересечений будет как раз
Суммарное число выходов обоих дешифраторов составляет 2n/2 + 2n/2 = 2n/2+1, что гораздо
меньше, чем 2n при реальных значениях n. Уже для ЗУ небольшой емкости видна эта
существенная разница: для структуры 2D при хранении 1К слов потребовался бы дешифратор с
1024 выходами, тогда как для структуры типа 3D нужны два дешифратора с 32 выходами
каждый. Недостатком структуры 3D в первую очередь является усложнение элементов памяти,
имеющих двухкоординатную выборку.
Структура типа 3D, показанная на рис. 4.4, а для ЗУ с одноразрядной организацией, может
применяться и в ЗУ с многоразрядной организацией (рис. 4.4, б), приобретая при этом
"трехмерный" характер. В этом случае несколько матриц управляются от двух дешифраторов,
относительно которьх они включены параллельно. Каждая матрица выдает один бит
адресованного слова, а число матриц равно разрядности хранимых слов. Структуры типа 3D
имеют также довольно ограниченное применение, поскольку в структурах типа 2DM (2D
модифицированная) сочетаются достоинства обеих рассмотренных структур — упрощается
дешифрация адреса и не требуются запоминающие элементы с двухкоординатной выборкой.
Структура 2DDM
ЗУ типа ROM (рис. 4.5, а) структуры 2DM для матрицы запоминающих элементов с
адресацией от дешифратора DCx имеет как бы характер структуры 2D: возбужденный выход
дешифратора выбирает целую строку. Однако в отличие от структуры 2D, длина строки не
равна разрядности хранимых слов. а многократно ее превышает. При этом число строк матрицы
уменьшается и, соответственно, уменьшается число выходов дешифратора. Для выбора одной
из строк служат не все разряды адресного кода, а их часть An-1... Аk Остальные разряды адреса
(от Ak-1 до Ао) используются, чтобы выбрать необходимое слово из того множества слов,
которое содержится в строке. Это выполняется с помощью мультиплексоров, на адресные
входы которых подаются коды Аk-1... Ао. Длина строки равна m2k, где m — разрядность хранимых слов. Из каждого "отрезка" строки длиной 2k мультиплексор выбирает один бит. На
выходах мультиплексоров формируется выходное слово. По paзрешению сигнала CS,
поступающего на входы ОЕ управляемых буферов с тремя состояниями, выходное слово
передается на внешнюю шину.
На рис. 4.5, б в более общем виде структура 2DM показана для ЗУ типа RAM с операциями
чтения и записи. Из матрицы М по-прежнему считывается "длинная" строка.
Данные в нужный отрезок этой строки записываются (или считываются из нее)
управляемыми буферами данных BD, воспринимающими выходные сигналы второго
дешифратора DCy, и выполняющими не только функции мультиплексирования, но и функции
изменения направления передачи данных под воздействием сигнала R/W.
Память с последовательным доступом
Память с последовательным доступом строится либо с использованием продвижения
данных в цепочке элементов (по подобию с регистрами сдвига), либо с хранением данных в
адресном ЗУ с необходимым управлением адресом доступа.
Основными представителями этого вида памяти являются видеопамять, буфер FIFO и стек.
Видеопамять
Видеопамять работает циклично, на ее выходе последовательно в порядке сканирования
экрана монитора лучом появляются коды, задающие параметры светимости (цвет, яркость)
элементарных точек экрана — пикселов. Текущее изображение на мониторе — кадр —
представлено последовательностью слов, длина которой равна числу пикселов экрана. Слово,
соответствующее одному пикселу, может иметь разрядность от 8 (для черно-белых мониторов)
до 24 (для полноцветного режима).
При реализации на основе адресной памяти циклический доступ к данным обеспечивается
счетчиком адреса с модулем, равным числу запоминаемых слов. При считывании после
каждого обращения адрес увеличивается на единицу, обеспечивая последовательное обращение
ко всем ячейкам ЗУ. При переполнении счетчика формируется сигнал начала кадра для
управления монитором (для запуска кадровой синхронизации). Запись возможна в пакетном
режиме или режиме одиночных записей. В первом случае сигнал переполнения счетчика и его
переход на начальный адрес являются сигналом начала передачи блока данных из основной
памяти или видеобуфера. Во втором случае адрес изменяемой ячейки (номер пиксела) и данные
сохраняются в буфере, а в момент совпадения этого адреса и содержимого счетчика
выполняется один цикл записи нового слова. Все остальное время ЗУ работает обычным
образом.
Построение циклических ЗУ с продвижением информации (рис. 4.6) показано с
представлением элементов хранения и перезаписи данных в виде статических регистров
При считывании выбран нижний канал мультиплексора MUX и записанные данные
постоянно переписываются с выхода на вход цепочки запоминающих элементов. В
последовательность данных вводятся специальные коды синхросигналов (кадровых и
строчных, но на рис. 4.6 для пояснения принципа показан только кадровый). Появление кода
синхросигнала на выходе обнаруживается компаратором и синхронизирует запуск развертки
монитора.
Пакетная запись может начинаться после появления запроса передачи в момент
прохождения кода кадрового синхросигнала. При этом вырабатывается сигнал разрешения
передачи кадра из памяти ЭВМ на вход D1, а мультиплексор переключается на верхний канал.
После приема целого кадра счетчик CTR, емкость которого равна хитине кадра, переполняется,
и под воздействием сигнала переполнения ЗУ возвращается в режим циклической перезаписи.
При одиночных записях устройство должно иметь дополнительно схему сравнения кода
счетчика и входного адресного кода (номера заменяемого кода пиксела). При их совпадении
мультиплексор переключается на верхний канал на один такт работы, чем обеспечивается
замена всего одного слова.
Буфер FIFO
Буфер FIFO, пример структуры которого приведен на рис. 4.7, представляет собою ЗУ для
хранения очередей данных (списков) с порядком выборки слов, таким же, что и порядок их
поступления. Интервалы между словами могут быть совершенно различными, т. к. моменты
записи слова в буфер и считывания из него задаются внешними сигналами управления
независимо друг от друга.
Возможность иметь разный темп приема и выдачи слов необходима, например, если
приемник способен принимать данные, поступающие регулярно с некоторой частотой, а
источник информации выдает слова в более быстром темпе и, может быть, к тому же не
регулярно. Такие данные поступают в их темпе в буфер FIFO, а из него считываются регулярно
с необходимой для приемника данных частотой. Новое слово ставится в конец очереди,
считывание осуществляется с начала очереди.
В схеме (рис. 4.7) перед началом работы оба счетчика адресов CTR1 и CTR2 сбрасываются.
При записи адреса увеличиваются на единицу при каждом обращении, т. е. возрастают, начиная
с нулевого. То же происходит при чтении слов, так что адрес чтения всегда "гонится" за
адресом записи. Если адреса сравняются при чтении, то буфер пуст. Если адреса сравняются
при записи, то буфер полон (адресами занята вся емкость счетчика) Эти ситуации отмечаются
соответствующими сигналами. Если буфер полон, то нужно прекратить прием данных, а если
пуст, то нужно прекратить чтение. Очередь удлиняется или укорачивается в зависимости от
разности чисел записанных и считанных слов. Переход через нуль осложнений не вызывает.
Задачу построения стека можно решить принципиально аналогичным способом. Эта задача
встречается в дальнейшем изложении при рассмотрении структуры микропроцессора.
Кэш-память
Кэш-память запоминает копии информации, передаваемой между устройствами (прежде
всего между процессором и основной памятью). Она имеет небольшую емкость в сравнении с
основной памятью и более высокое быстродействие (реализуется на триггерных элементах
памяти).
При чтении данных сначала выполняется обращение к кэш-памяти (рис. 4.8). Если в кэше
имеется копия данных адресованной ячейки основной памяти, то кэш вырабатывает сигнал Hit
(попадание) и выдает данные на общую шину данных. В противном случае сигнал Hit не
вырабатывается и выполняется чтение из основной памяти и одновременное помещение
считанных данных в кэш.
Эффективность кэширования обуславливается тем, что большинство прикладных программ
имеют циклический характер и многократно используют одни и те же данные. Поэтому после
первого использования данных из относительно медленной основной памяти повторные
обращения требуют меньше времени. К тому же при использовании процессором кэш-памяти
основная память освобождается, и могут выполняться регенерация данных в динамическом ЗУ
или использование памяти другими устройствами.
Объем кэш-памяти много меньше емкости основной памяти и любая единица информации,
помещаемая в кэш, должна сопровождаться дополнительными данными (тегом),
определяющими, копией содержания какой ячейки основной памяти является эта единица
информации
В полностью ассоциативной кэш-памяти (FACM, Fully Associated Cache Memory), структура
которой показана на рис. 4.9, каждая ячейка хранит данные, а в поле "тег" — полный
физический адрес информации, копия конторой записана. При любых обменах физический
адрес запрашиваемой информации сравнивается с полями "тег" всех ячеек и при совпадении их
в любой ячейке устанавливается сигнал Hit.
При чтении и значении сигнала Hit = 1 данные выдаются на шину данных, (если же
совпадений нет (Hit = 0), то при чтении из основной памяти данные вместе с адресом
помещаются в свободную или наиболее давно не используемую ячейку кэш-памяти.
При записи данные вместе с адресом сначала, как правило, размещаются в кэш-памяти (в
обнаруженную ячейку при Hit = 1 и свободную при Hit = 0). Копирование данных в основную
память выполняется под управлением специального контроллера, когда нет обращений к
памяти.
Память типа FACM является весьма сложным устройством и используется только при
малых емкостях, главным образом в специальных приложениях.
В то же время этот вид кэш-памяти обеспечивает наибольшую функциональную гибкость и
бесконфликтность адресов, т. к. любую единицу информации можно загрузить в любую ячейку
кэш-памяти.
Сложность FACM заставляет искать иные структуры кэш-памяти, более экономичные по
затратам аппаратных средств на их реализацию. К числу таких структур относятся кэш-память
с прямым размещением и кэш-память с наборно-ассоциативной архитектурой (с ассоциацией
по нескольким направлениям). Для конкретного рассмотрения этих структур укажем, что
главными параметрами кэш-памяти являются размер строки (Cache Line) и их число (рис. 4.10).
Строка представляет собою некоторый набор слов. Ее емкость будем считать соответствующей
странице основной памяти.
В структуре FACM, называемой также структурой с произвольной загрузкой, любую
страницу можно загрузить в любую строку кэш-буфера (рис. 4.11, а). В качестве тега
используется полный физический адрес, если речь идет об адресации отдельных слов, или
старшие разряды этого адреса за вычетом младших (смещения), если смещение адресует слово
в пределах строки.
Иными словами, в этом случае старшие разряды адреса рассматриваются как тег, тогда как
младшие используются для адресации в пределах строки.
В кэш-памяти с прямым размещением (с прямым отображением) несколько страниц
основной памяти строго соответствуют одной строке кэша (рис. 4.11, б). Так как занимать
строку в одно и го же время может только одна страница, нужен специальный ее признак —
тег. Адрес от процессора делится на три части. Младшие разряды (смещение) определяют
положение слова в строке. Средние позволяют выбрать одну из строк кэш-памяти. Оставшиеся
старшие образуют тег. По адресу строки производится считывание. Поле адресов считанной
строки сравнивается с теговым адресом и, если есть совпадение, вырабатывается сигнал Hit
выдачи информации и затем мультиплексированием из строки данных выбирается слово. При
загрузке из внешней памяти заменяется вся строка. Здесь следует отметить, что блочные
передачи в современных системах осуществляются достаточно быстро.
Тег для кэш-памяти с прямым размещением сильно сокращается по разрядности. Обычно
номер строки есть адрес страницы по модулю, равному целой степени двойки. На рис. 4.11, б
это 128. Достоинство кэша с прямым размещением— экономичность по аппаратурным
затратам. Недостаток — ограничения на расположение страниц в кэше, что может не позволить
сформировать в нем оптимальный набор страниц, т. к. передача в кэш страницы вызывает
удаление из него другой, которая, может быть нужна для формирования оптимального набора
страниц.
Промежуточным по сложности и эффективности вариантом между структурами FACM и с
прямым размещением является кэш-память с ассоциацией по нескольким направлениям
(наборно-ассоциативная). В этом варианте несколько строк кэша объединяются в наборы, а
средние разряды адреса памяти определяют уже не одну строку, а набор (рис. 4.11, в). Кэшпамять делится на наборы с небольшим числом строк, кратным двойке, т. е. 2, 4, 8 ... и т. д. (на
рисунке это 2). Страницу основной памяти можно поместить только в тот набор, номер
которого равен адресу страницы по модулю (в данном случае модуль равен 64). Место
страницы в наборе может быть произвольным. Сравнение тегов со старшими разрядами адреса
производится только для строк, входящих в набор.
По числу строк в наборе кэш-памяти различают разнообразные структуры: двухвходовые,
четырехвходовые и т. д.
Для взятого примера используются два отдельных блока памяти для четных строк и
нечетных строк. Одновременно выбираются четные и нечетные строки (слова в них).
Считывание идет от того блока, где имеется совпадение тега и тегового адреса. При этом из
строки через смешение выбирается адресованное слово. При отсутствии совпадений
происходит обращение к основной памяти и замещение строки в одном из блоков кэша.
Блок-схема наборно-ассоциативного кэша показана на рис. 4.11, в. По сравнению с кэшем с
прямым размещением кэш наборно-ассоциативного типа имеет несколько удлиненный тег (во
взятом примере всего на один разряд). Возможность свободного размещения страниц в наборе
позволяет сформировать в кэше лучший состав страниц, т. к. имеется возможность выбрать ту
или иную заменяемую страницу. В современных микропроцессорных системах кэш первого
уровня, обозначаемый L1 (от английского слова Level (внутрипроцессорный)), обычно имеет
наборно-ассоциативную структуру, а кэш второго уровня L2 (внешний) — структуру с прямым
размещением.
Ряд фирм выпускают микросхемы ассоциативной памяти. Например, одна из микросхем
фирмы Cyrix имеет 4К строк, 15-разрядный теговый адрес и 16-разрядный выход. Для
построения кэш-памяти используют чаше всего обычные SRAM в сочетании с кэшконтроллерами.
В высокопроизводительном микропроцессоре Power 3 фирмы IBM использован кэш
наборно-ассоциативного типа емкостью 32 Кбайта для команд и 64 Кбайта для данных на 128
направлений. Для связей с кэшем второго уровня L2 в системе Power 3 применена 256разрядная шина. Емкость кэша L2 от 1 до 16 Мбайт. Кстати говоря, именно МП Power 3
использован в суперкомпьютере, который сумел обыграть чемпиона мира по шахматам Гарри
Каспарова.
Запоминающие устройства типа ROM(M), PROM, EPROM, EEPROM
Запоминающие устройства типа ROM (память только для чтения) хранит информацию,
которая либо вообще не изменяется (в ЗУ типов ROM(M) и PROM), либо изменяется редко и не
в оперативном режиме (в ЗУ типов EPROM и EEPROM).
В масочные ЗУ типа ROM(M) информация записывается при изготовлении микросхем на
промышленных предприятиях с помощью шаблона (маски) на завершающем этапе
технологического процесса.
ЗУ типа PROM программируются после изготовления их предприятием электронной
промышленности в лабораториях потребителей без использования сложных технологических
процессов. Для этого используются несложные устройства (программаторы).
Программирование постоянной памяти заключается в том или ином размещении элементов
связи между горизонтальными и вертикальными линиями матрицы запоминающих элементов.
Запоминающие устройства типа ROM имеют многоразрядную организацию (чаще всего 8разрядную или 4-разрядную, для некоторых ИС 16-разрядную) и обычно выполняются по
структуре 2DM. Простейшие ЗУ могут иметь структуру 2D. Технологии изготовления
постоянных ЗУ разнообразны - ТТЛ(Ш), КМОП. n-МОП и др.
Масочные ЗУ
Элементом связи в масочных ЗУ могут быть диоды, биполярные транзисторы. МОПтранзисторы и т. д.
В матрице диодного ROM(M) (рис. 4.12, а) горизонтальные линии являются линиями
выборки слов, а вертикальные — линиями считывания. Считываемое слово определяется
расположением диодов в узлах координатной сетки. При наличии диода высокий потенциал
выбранной горизонтальной линии передается на соответствующую вертикальную линию, и в
данном разряде слова появляется сигнал логической единицы. При отсутствии диода потенциал
близок к нулевому, т. к. вертикальная линия через резистор связана с землей. В изображенной
матрице при возбуждении линии выборки Ш1 считывается слово 11010001 (в ячейке номер
один хранится это слово). При возбуждении Ш2 считывается слово 10101011 (оно хранится в
ячейке номер 2). Шины выборки являются выходами дешифратора адреса, каждая адресная
комбинация возбуждает свой выход дешифратора, что приводит к считыванию слова из
адресуемой ячейки.
В матрице с диодными элементами в одних узлах матрицы диоды изготовляются, в других
— нет. При этом, чтобы удешевить производство, при изготовлении ЗУ стремятся варьировать
только один шаблон, так чтобы одни элементы связи были законченными и работоспособными,
а другие - не завершенными и как бы отсутствующими. Для матриц с МОП - тpaнзисторами
часто в МОП-транзисторах, соответствующих хранению нуля, увеличивают толщину
подзатворного окисла, что ведет к увеличению порогового напряжения транзистора. В этом
случае рабочие напряжения ЗУ не в состоянии открыть транзистор. Постоянно закрытое
состояние транзистора аналогично его отсутствию Матрица с МОП-транзисторами показана на
рис. 4.12, б.
ЗУ с масочным программированием отличаются компактностью запоминающих элементов
и, следовательно, высоким уровнем интеграции. При больших объемах производства масочное
программирование предпочтительно, однако при недостаточной тиражности ЗУ затраты на
проектирование и изготовление шаблона для технологического программирования ЗУ окажутся
чрезмерно высокими. Отсюда видна и область применения масочных ЗУ — хранение
стандартной информации, имеющей широкий круг потребителей. В частности, масочные ЗУ
имеют в качестве "прошивки" коды букв алфавитов (русского и латинского), таблицы типовых
функций (синуса, квадратичной функции и др.), стандартное программное обеспечение и т. п.
ЗУ типа PROM
В ЗУ типа PROM микросхемы программируются устранением или созданием специальных
перемычек. В исходной заготовке имеются (или отсутствуют) все перемычки. После
программирования остаются или возникают только необходимые.
Устранение части перемычек свойственно ЗУ с плавкими перемычками (типа fuse —
предохранитель). При этом в исходном состоянии ЗУ имеет все перемычки, а при
программировании часть их ликвидируется путем расплавления импульсами тока достаточно
большой амплитуды и длительности.
В ЗУ с плавкими перемычками эти перемычки включаются в элем роды диодов или
транзисторов. Перемычки могут быть металлическими (вначале изготовлялись из нихрома,
позднее из титановольфрамовых и других сплавов) или поликристаллическими (кремниевыми).
В исходном состоянии запоминающий элемент хранит логическую единицу, логический нуль
нужно записать, расплавляя перемычку.
Создание части перемычек соответствует схемам, которые в исходном состоянии имеют
непроводящие перемычки в виде пары встречно включенных диодов или тонких
диэлектрических слоев, пробиваемых при программировании с образованием низкоомных
сопротивлений. Схемы с тонкими пробиваемыми диэлектрическими перемычками (типа
antifuse) наиболее компактны и совершенны. Их применение характерно для программируемых
логических СБИС. В номенклатуре продукции стран СНГ ЗУ с перемычками типа antifuse
отсутствуют.
Второй тип запоминающего элемента PROM — два встречно включенных диода. В
исходном состоянии сопротивление такой цепочки настолько велико, что практически
равноценно разомкнутой цепи, и запоминающий элемент хранит логический нуль. Для записи
единицы к диодам прикладывают повышенное напряжение, пробивающее диод, смещенный в
обратном направлении. Диод пробивается с образованием в нем короткого замыкании и играет
роль появившейся проводящей перемычки.
Запоминающие элементы с плавкими перемычками и парами диодов показаны на рис. 4.13,
о, б в исходном состоянии и после программировании.
Матрица запоминающих элементов ЗУ с плавкими перемычками в технике ТТЛ
(микросхемы К155РЕЗ) показана на рис. 4.14. ЗУ имеет организацию 32x8. Матрица содержит
32 транзистора с 9 эмиттерами в каждом (8 рабочих и один технологический для уточнения
режима прожигания, технологический эмиттер на рисунке не показан). Высокий потенциал на
какой-либо шине выборки активизирует соответствующий транзистор, работающий в режиме
эмиттерного повторителя. До программирования транзисторы передают высокий потенциал
базы на все выходные (разрядные) линии, т. е. по всем адресам записаны слова, состоящие из
одних единиц. Пережигание перемычки в цепи какого-либо эмиттера дает ноль в данном
разряде слова, например, для ячейки с номером 1 показан вариант программирования для
хранения по этому адресу слова 10100101. Выходы матрицы связаны с внешними цепями через
буферные каскады, имеющие выходы типа ОК. или ТС. ЗУ имеет структуру 2D.
Программирование ЗУ с плавкими перемычками реализуется простыми аппаратными
средствами и может быть доступно схемотехникам даже при отсутствии специального
оборудования. На рис. 4.15 показан многоэмиттерный транзистор (МЭТ) с плавкими
перемычками и дополнительными элементами, обеспечивающими программирование ЗУ.
Выходы этого запоминающего элемента передаются во внешние цепи через буферные каскады
с тремя состояниями, работа которых разрешается сигналом ОЕ. При этом сигнал разрешения
работы формирователей импульсов программирования OE отсутствует, и они не влияют на
работу схемы. При программировании буферы данных переводятся в третье состояние (ОЕ = 0),
а работа формирователей F разрешается. Слово, которое нужно записать в данной ячейке,
подается на линии данных D7...D0. Те разряды слова, в которых имеются единицы, будут иметь
на выходах формирователей низкий уровень напряжения. Соответствующие эмиттеры МЭТ
окажутся под низким напряжением и через них пройдет ток прожигания перемычки. При
чтении отсутствие перемычки даст нулевой сигнал на вход буфера данных. Так как буфер
инвертирующий, с его выхода снимется единичный сигнал, т. е. тот, который и записывался.
Адресация программируемой ячейки как обычно обеспечивается дешифратором адреса,
подающим высокий уровень потенциала на базу адресуемого МЭТ.
Для прожигания перемычек на них подают токи в десятки миллиампер в виде серии
импульсов (для большей надежности прожигания). Не все перемычки удается пережечь
надлежащим образом, коэффициент программируемости для серии К556, например, составляет
0,5...0,7. В ЗУ с плавкими перемычками возможно восстановление проводимости перемычек
через некоторое время из-за миграции в электроматериалах.
Плавкие перемычки занимают на кристалле относительно много места, поэтому уровень
интеграции ЗУ с такими перемычками существенно ниже, чем у масочных ЗУ. В то же время
простота программирования пользователем и невысокая стоимость в свое время обусловили
широкое распространение ЗУ типа PROM. Невысокая стоимость программируемых пользователем ЗУ объясняется тем, что изготовитель выпускает микросхемы без учета конкретного
содержимого ЗУ, т. е. освобожден от проектирования по специализированным заказам и.
следовательно, связанных с этим затрат.
Среди отечественных PROM ведущее место занимают микросхемы серии К556, имеющие
информационную емкость 1...64 Кбит и время доступа па адресу 70...90 нс.
Внешняя организация памяти типов ROM(M) и PROM проста: входными сигналами для них
служат адресный код и сигнал выбора микросхемы CS. Во времени последовательность
сигналов следующая: вначале подается адресным код (чтобы произошла дешифрация адреса и
было исключено обращение к непредусмотренной ячейке), затем поступает сигнал выбора
микросхемы CS и после задержки, определяемой быстродействием схемы, на выходах данный
устанавливаются правильные значения считываемых сигналов.
ЗУ типов EPROM и EEPROM
В ре программируемых ЗУ типов EPROM и EEPROM (или E2PROM) в можно стирание
старой информации и замена ее новой в результате специального процесса, для проведения
которого ЗУ выводится из рабочего режима. Рабочий режим (чтение данных) — процесс,
выполняемый с относительно высокой скоростью. Замена же содержимого памяти требует
выполнения гораздо более длительных операций.
По способу стирания старой информации различают ЗУ со стиранием ультрафиолетовыми
лучами (EPROM или в русской терминологии РПЗУ-УФ, т. е. репрограммируемые ПЗУ с
ультрафиолетовым стиранием) и электрическим стиранием (E2PROM или РПЗУ-ЭС).
Запоминающими элементами современных РПЗУ являются транзисторы типов МНОП и
ЛИЗМОП (добавление ЛИЗ к обозначению МОП происходит от слов Лавинная Инжекция
Заряда).
МНОП-транзистор отличается от обычного МОП-транзистора двухслойным подзатворным
диэлектриком. На поверхности кристалла расположен тонкий слой двуокиси кремния Si02,
далее более толстый слой нитрида кремния Si3N4 и затем уже затвор (рис. 4.16, о). На границе
диэлектрических слоев возникают центры захвата заряда. Благодаря туннельному эффекту,
носители заряда могут проходить через тонкую пленку окисла толщиной не более 5 мкм и
скапливаться на границе раздела слоев. Этот заряд и является носителем информации,
хранимой МНОП-транзистором. Заряд записывают созданием под затвором напряженности
электрического поля, достаточной для возникновения туннельного перехода носителей заряда
через тонкий слой Si02 На границе раздела диэлектрических слоев можно создавать заряд
любого знака в зависимости от направленности электрического поля в подзатворной области
Наличие заряда влияет на пороговое напряжение транзистора.
Для МНОП-транзистора с n-каналом отрицательный заряд на дранице развела слоев
повышает пороговое напряжение (экранирует воздействие положительного напряжения на
затворе, отпирающего транзистор). При этом пороговое напряжение возрастает настолько, что
рабочие напряжения на затворе транзистора не в состоянии его открыть (создать в нем
проводящий канал). Транзистор, в котором заряд отсутствует или имеет другой знак, легко
открывается рабочим значением напряжения. Так осуществляется хранение бита в МНОП: одно
из состояний трактуется как отображение логической единицы, другое — нуля.
При программировании ЗУ используются относительно высокие напряжения, около 20 В.
После снятия высоких напряжений туннельное прохождение носителей заряда через
диэлектрик прекращается и заданное транзистору пороговое напряжение остается неизменным.
После 104...106 перезаписей МНОП-транзистор перестает устойчиво хранить заряд. РПЗУ на
МНОП-транзисторах энергонезависимы и могут хранить информацию месяцами, годами и
десятками лет.
Перед новой записью старая информация стирается записью нулей во все запоминающие
элементы. Тип ЗУ — РПЗУ-ЭС.
Транзисторы типа ЛИЗМОП всегда имеют так называемый плавающий затвор, который
может быть единственным или вторым, дополнительным к обычному (управляющему) затвору.
Транзисторы с одним плавающим затвором используются в ЗУ типа РПЗУ-УФ, а транзисторы с
двойным затвором пригодны для применения как в РПЗУ-УФ, так и в РПЗУ-ЭС. Рассмотрим
более современный тип — ЛИЗМОП-транзистор с двойным затвором (рис. 4.16, 6).
Принцип работы ЛИЗМОП с двойным затвором близок к принципу работы МНОПтранзистора — здесь также между управляющим затвором и областью канала помещается
область, в которую при программировании можно вводить заряд, влияющий на величину
порогового напряжения транзистора. Только область введения заряда представляет собою не
границу раздела слоев диэлектрика, а окруженную со всех сторон диэлектриком проводящую
область (обычно из поликристаллического кремния), в которую, как в ловушку, можно ввести
заряд, способный сохраняться в ней в течение очень длительного времени. Эта область и
называется плавающим затвором.
При подаче на управляющий затвор, исток и сток импульса положительного напряжения
относительно большой амплитуды 20...25 В в обратно смещенных р-n переходах возникает
лавинный пробой, область которого насыщается электронами. Часть электронов, имеющих
энергию, достаточную для преодоления потенциального барьера диэлектрической области,
проникает в плавающий затвор. Снятие высокого программирующего напряжения восстанавливает обычное состояние областей транзистора и запирает электроны в плавающем
затворе, где они могут находиться длительное время (в высококачественных приборах многие
годы).
Заряженный электронами плавающий затвор увеличивает пороговое напряжение
транзистора настолько, что в диапазоне рабочих напряжений проводящий канал в транзисторе
не создается.
При отсутствии заряда в плавающем затворе транзистор работает в обычном ключевом
режиме.
Стирание информации может производиться двумя способами — ультрафиолетовым
облучением или электрическими сигналами. В первом случае корпус ИС имеет специальное
прозрачное окошко для облучения кристалла. Двуокись кремния и поликремний прозрачны для
ультрафиолетовых лучей. Эти лучи вызывают в областях транзистора фототоки и тепловые
токи, что делает области прибора проводящими и позволяет заряду покинуть плавающий
затвор. Операция стирания информации этим способом занимает десятки минут, информация
стирается сразу во всем кристалле. В схемах с УФ-стиранием число циклов
перепрограммирования существенно ограничено, т. к. под действием ультрафиолетовых лучей
свойства материалов постепенно изменяются. Число циклов перезаписи у отечественных ИС
равно 10...100.
Электрическое стирание информации осуществляется подачей на управляющие затворы
низкого (нулевого) напряжения, а на стоки — высокого напряжения программирования.
Электрическое стирание имеет преимущества: можно стирать информацию не со всего
кристалла, а выборочно (индивидуально для каждого адреса). Длительность процесса
"стирание-запись" значительно меньше, сильно ослабляются ограничения на число циклов
перепрограммирования (допускается 104...106 таких циклов). Кроме того, перепрограммировать
ЗУ можно, не извлекая микросхему из устройства, в котором она работает. В то же время схемы
с электрическим стиранием занимают больше места на кристалле, в связи с чем уровень их
интеграции меньше, а стоимость выше. В последнее время эти недостатки быстро
преодолеваются и ЭС-стирание вытесняет УФ-стирание.
Предшественниками даухзатворных ЛИЗМОП-транзисторов были однозатворные, имевшие
только плавающий затвор. Эти транзисторы изготовлялись обычно с р-каналом, поэтому
введение электронов в плаваюший затвор приводило к созданию в транзисторе проводящего
канала, а удаление заряда — к исчезновению такого канала. При использовании таких
транзисторов запоминающие элементы состоят из двух последовательно включенных
транзисторов: ключевого МОП-транзистора обычного типа для выборки адресованного элемента и ЛИЗМОП-транзистора, состояние которого определяет хранимый бит. Стирание
информации производится ультрафиолетовыми лучами.
Подключение двухзатворных ЛИЗМОП-транзисторов к линиям выборки строк и линиям
чтения в матрицах ЗУ показано на рис. 4.17. Запись логического нуля осуществляется путем
заряда плавающего затвора инжекцией "горячих" электронов в режиме программирования.
Стирание информации, под которым понимается удаление заряда из плавающего затвора,
приводит к записи во все запоминающие элементы логических единиц, т. к. в данном случае
опрашиваемые транзисторы открываются и передают напряжение Ucc на линии считывания.
Среди отечественных РПЗУ-УФ (в маркировке они имеют буквы РФ) наиболее известна
серия К573 с широким набором типономиналов, а среди РПЗУ-ЭС (в маркировке имеют буквы
РР) имеются серии КР558 (на основе n-МНОП), К1609, К1624, К1626 на ЛИЗМОП с двумя
затворами.
Отечественные ROM характеризуются в настоящее время следующими параметрами:
масочные ИС имеют информационную емкость до 1 Мбит а при временах доступа около 200
нс, микросхемы с плавкими перемычками соответственно 64 Кбита и 80 нс, РПЗУ-УФ 1 Мбит и
350 нс, РПЗУ-ЭС 64 Кбита и 250 нс.
На уровне мировой техники имеются ЗУ типа РПЗУ-УФ с информационной емкостью до 8
Мбит при временах доступа 45 нс (фирма Atmel), ЗУ типа РПЗУ-ЭС с информационной
емкостью до 256 Кбит при временах доступа 90 нс и допустимом числе циклов перезаписи 10 5 с
временем сохранения данных более 10 лет Это ЗУ использует один источник питания 5 В и
потребляет] ток 2 мА в активном режиме и 100 мкА при отсутствии обращений. Возможна
байтовая или страничная запись за время 3 мс (фирма SGS-Thomson).
Импульсное питание ROM
Энергонезависимость всех ROM, сохраняющих информацию при отключении питания,
открывает возможности экономии питания при их эксплуатации и соответственно, улучшения
их теплового режима, что повышает надежность схем. Питание можно подавать только на ИС,
к которой в данный момент происходит обращение. На рис. 4.18 показан обычный вариант
построения модуля памяти, состоящего из нескольких ИС, и вариант с импульсным питанием.
В обычном варианте напряжение Ucc подключается ко всем ИС постоянно, а выбор адресуемой
ИС осуществляется сигналом CS. В варианте с импульсным питанием работа всех ИС по
входам CS постоянно разрешена, но питание подключается только к выбранной микросхеме с
помощью ключа, управляемого от выходов адресного дешифратора, декодирующего старшие
разряды адреса.
Режим импульсного питания может многократно уменьшить потребляемую модулем
мощность, но, одновременно, увеличивает время обращения к ЗУ при одиночных произвольных
обращениях, т. к. после включения питания необходимо время для установления режима ИС.
При чтении данных, расположенных по близким адресам, когда старшие разряды адреса
остаются неизменными, потерь времени не возникает.
§4.4. Флэш-память
Флэш-память (Flash-Memory) по типу запоминающих элементов и основным принципам
работы подобна памяти типа E2PROM> однако ряд архитектурных и структурных особенностей
позволяют выделить ее в отдельный класс. Разработка Флэш-памяти считается кульминацией
десятилетнего развития схемотехники памяти с электрическим стиранием информации.
В схемах Флэш-памяти не предусмотрено стирание отдельных слов, стирание информации
осуществляется либо для всей памяти одновременно, либо для достаточно больших блоков.
Понятно, что это позволяет упростить схемы ЗУ, т. е. способствует достижению высокого
уровня интеграции и быстродействия при снижении стоимости. Технологически схемы Флэшпамяти выполняются с высоким качеством и обладают очень хорошими параметрами.
Термин Flash по одной из версий связан с характерной особенностью этого вида памяти —
возможностью одновременного стирания всего ее объема Согласно этой версии ещё до
появления Флэш-памяти при хранении секретных данных использовались устройства, которые
при попытках несанкционированного доступа к ним автоматически стирали хранимую
информацию и назывались устройствами типа Flash (вспышка, мгновение). Это название
перешло и к памяти, обладавшей свойством быстрого стирания всего массива данных одним
сигналом.
Одновременное стирание всей информации ЗУ реализуется наиболее просто, но имеет тот
недостаток, что даже замена одного слова в ЗУ требует стирания и новой записи для всего ЗУ в
целом. Для многих применений это неудобно. Поэтому наряду со схемами с одновременным
стиранием всего содержимого имеются схемы с блочной структурой, в которых весь массив
памяти делится на блоки, стираемые независимо друг от друга. Объем таких блоков сильно
разнится: от 256 байт до 128 Кбайт.
Число циклов репрограммирования для Флэш-памяти хотя и велико, но ограничено, т. е.
ячейки при перезаписи "изнашиваются". Чтобы увеличить долговечность памяти, в ее работе
используются специальные алгоритмы, способствующие "разравниванию" числа перезаписей
по всем блокам микросхемы .
Соответственно областям применения Флэш-память имеет архитектурные и
схемотехнические
разновидности. Двумя основными направлениями
эффективного
использования Флэш-памяти являются хранение не очень часто изменяемых данных
(обновляемых программ, в частности) и замена памяти на магнитных дисках.
Для первого направления в связи с редким обновлением содержимого параметры циклов
стирания и записи не столь существенны как информационная емкость и скорость считывания
информации. Стирание в этих схемах может быть как одновременным для всей памяти, так и
блочным. Среди устройств с блочным стиранием выделяют схемы со специализированными
блоками (несимметричные блочные структуры). По имени так называемых Boot-блоков, в
которых информация надежно защищена аппаратными средствами от случайного стирания, эти
ЗУ называют Boot Block Flash Memory. Boot-блоки хранят программы инициализации системы,
позволяющие ввести ее в рабочее состояние после включения питания.
Микросхемы для замены жестких магнитных дисков {Flash-File Memory) содержат более
развитые средства перезаписи информации и имеют идентичные блоки (симметричные
блочные структуры).
Одним из элементов структуры Флэш-памяти является накопитель (матрица запоминающих
элементов). В схемотехнике накопителей развиваются два направления: на основе ячеек типа
ИЛИ-НЕ (NOR) и на основе ячеек типа И-НЕ (NAND).
Накопители на основе ячеек ИЛИ-НЕ (с параллельным включением ЛИЗ-МОПтранзисторов с двойным затвором) обеспечивают быстрый доступ при произвольной выборке.
Они приемлемы для разных применений, но наиболее бесспорным считается их применение в
памяти для хранении редко обновляемых данных. При этом возникает полезная
преемственность с применявшимися ранее ROM и EPROM, сохраняются типичные сигналы
управления, обеспечивающие чтение с произвольной выборкой, структура матрицы накопителя
показана на рис. 4.19. Каждый столбец представляет собою совокупность параллельно
соединенных транзисторов. Разрядные линии выборки находятся под высоким потенциалом.
Все транзисторы невыбранных строк заперты. В выбранной строке открываются и передают
высокий уровень напряжения на разрядные линии считывания тс транзисторы, в плавающих
затворах которых отсутствует заряд электронов. и, следовательно, пороговое напряжение
транзистора имеет нормальное (не повышенное) значение.
Накопители на основе ячеек ИЛИ-НЕ широко используются фирмой Intel. Имеются мнения
о конкурентоспособности этих накопителей и в применениях, связанных с заменой жестких
магнитных дисков Флэш-памятью. Структуры с ячейками И-НЕ более компактны, но не
обеспечивают режима произвольного доступа и практически используются только в схемах
замены магнитных дисков. В схемах на этих ячейках сам накопитель компактнее, но
увеличивается количество логических элементов обрамления накопителя. Для улучшения
технико-экономических характеристик в схемах Флэш-памяти применяются различные
средства и приемы:
1. Прерывание процессов записи при обращениях процессора для чтения (Erase Suspend).
Без этого возникали бы длительные простои процессора, т. к. запись занимает достаточно
большое время. После прерывания процесс записи возобновляется под управлением
внутренних средств Флеш-памяти.
2. Внутренняя очередь команд, управляющих работой Флэш-памяти, которая позволяет
организовать конвейеризацию выполняемых операций и ускорить процессы чтения и записи.
3. Программирование длины хранимых в ЗУ слов для согласования с различными портами
ввода/вывода.
4. Введение режимов пониженной мощности на время, когда к ЗУ нет обращений, в том
числе режима глубокого покоя, в котором мощность снижается до крайне малых значений
(например, ток потребления снижается до 2 мкА). Эти особенности очень важны для устройств
с автономным (батарейным) питанием.
5. Приспособленность к работе при различных питающих напряжениях (5 В; 3,3 В и др.).
Сама схема "чувствует" уровень питания и производит необходимые переключения для
приспособления к нему.
6. Введение в структуры памяти страничных буферов для быстрого накопления новых
данных, подлежащих записи. Два таких буфера могут работать в режиме, называемом "пингпонг", когда один из них принимает слова, подлежащие записи, а другой в это время
обеспечивает запись своего содержимого в память. Когда первый буфер заполнится, второй
уже освободится, и они поменяются местами.
7. Различные меры защиты от случайного или несанкционированного доступа.
Флэш-память с адресным доступом, ориентированная на хранение не слишком часто
изменяемой информации, может иметь одновременное стирание
всей
информации
(архитектура
Bulk
Erase)
или
блочное
стирание (архитектура Boot Block FlashMemory).
Имея преемственность с ЗУ типов E2PROM и EPROM, разработанными ранее, схемы Флэшпамяти предпочтительнее E2PROM по информационной емкости и стоимости в применениях,
где не требуется индивидуальное стирание слов, а в сравнении с EPROM обладают тем
преимуществом, что не требуют специальных условий и аппаратуры для стирания данных,
которое к тому же происходит гораздо быстрее.
Память типа Bulk Erase
Память типа Bulk Erase фирмы Intel, наиболее известной среди разработчи ков Флэшпамяти, имеет время записи байта около 10 мкс, допускает до 10 5 циклов стирания, напряжение
программирования для нее составляет 12 В ± 5%, ток активного режима около 10 мА, в режиме
покоя около 50 мкА. Время доступа при чтении равно приблизительно 100 не, время стирания и
время программирования всего кристалла составляет 0,6...4 с для кристаллов емкостью 256
Кбит...2 Мбит.
В отличие от традиционного управления схемами памяти с помощью адресных и
управляющих сигналов, Флэш-память имеет дополнительное управление словами-командами,
записываемыми процессором в специальный pегистр, функционирующий только при высоком
уровне
напряжения
на
выводе
микросхемы,
обозначаемом
Upp
(напряжении
программирования). При отсутствии такого уровня Upp схема работает только как память для
чтения под управлением традиционных сигналов, задающих операции чтения. снижении
мощности, управления третьим состоянием и выдачи идентификатора.
На рис. 4.20 показана структура Флэш-памяти типа Bulk Erase (схемы 28F010. 28F020
фирмы Intel и др).
Входы А являются адресными, причем в течение цикла записи адреса фиксируются в
регистре-защелке по сигналу строба STB. Ввод/вывод данных (линии DQ) осуществляется
через буферы с третьим состоянием. В течение цикла записи данные фиксируются в регистре-
защелке
Сигналы СЕ, ОЕ и WE L-активны. Сигнал СЕ активизирует управляющую логику, буферы
ввода/вывода данных, дешифраторы адреса DCY, DCX И усилители чтения. При высоком
уровне сигнала СЁ (схема не выбрана) буферы входят в третье состояние, а потребление
мощности снижается до уровня покоя (Standby). Сигнал ОЁ низким уровнем разрешает вывод
данных через буферы в течение циклов чтения (естественно, только при низком уровне сигнала
СЕ). к Сигнал WE разрешает запись в регистр команд и матрицу запоминающих ячеек и своими
фронтами загружает регистры-защелки (отрицательным — регистр-защелку адреса,
положительным —данных).
Схемы управления и содержимое регистра команд определяют состояние переключателей
уровней напряжения U используемых в разных режимах работы (при стирании,
программировании или чтении).
Для получения выходных данных при чтении требуется активное состояние сигналов СЕ и
ОЕ. При этом низкий уровень U делает возможным чтение только данных памяти, а высокий
позволяет считывать также коды идентификаторов и информацию для проверки операций
стирания/программирования. Операции с идентификатором выводят код фирмы-изготовителя и
микросхемы. Эти сведения позволяют согласовать алгоритмы стирания и программирования
схемы и программирующего оборудования, что производится автоматически
Коды идентификаторов находятся в двух ячейках памяти и могут считываться с помощью
определенной комбинации сигналов или регистре команд (чтением после подачи в регистр
команды 90Н).
При выполнении операций записи коды адресов и данных фиксируются во внутренних
регистрах-защелках. При высоком уровне U выполняются те же операции и дополнительно
разрешается стирание и программирование памяти Все действия, связанные с изменением
содержимого памяти, производятся с использованием регистра команд. Регистр команд не
занимает какой-либо позиции в адресном пространстве и загружается обычным циклом записи
от процессора при низком уровне Upp Его содержимое играет роль входной информации для
внутреннего автомата управления схемами стирания и программирования памяти
Используются 7 команд, две из которых задают операции чтения данных и кодов
идентификатора), две другие относятся к операции стирания (подготовка стирания/стирание и
проверка стирания), две команды относятся к операции программирования (подготовка
программирования/программирование и проверка программирования) и одна команда задает
операцию сброса микросхемы.
При снижении уровня Upp регистр команд сбрасывается, разрешая микросхеме только
операции чтения.
По команде стирания стираются все байты матрицы параллельно, после чего все они
должны быть проверены. Для этого байты адресуются и активизируются подачей специального
напряжения. Чтение из ячейки кода OFFH показывает, что все биты байта стерты. Если
считывается иной код, выполняется повторная операция стирания. Затем проверка
возобновляется с адреса последнего проверенного байта. Процесс проверки продолжается до
достижения последнего адреса.
Программирование памяти ведется байт за байтом (последовательно или при произвольном
доступе). Цикл чтения от процессора выводит данные байта, которые сравниваются с
заданными. Равенство байтов свидетельствует об успешном программировании. После этого
процесс программирования переходит к следующему байту.
Команда сброса является средством надежного устранения действия команд
стирания/программирования. После каждой из этих команд в регистр команд можно записать
код операции сброса, что устранит возможность каких-либо действий, связанных с указанными
командами. Содержимое памяти не сможет изменяться. Для дальнейшего приведения схемы в
желаемое состояние в регистр команд нужно записать соответствующую команду.
При переходе сигнала СЕ к высокому уровню вводится режим пониженной мощности. Если
это происходит при стирании, программировании или проверках данных, то активный ток
сохраняется до завершения указанных операций.
Флэш-память с несимметричной блочной структурой
Схемам типа Boot Block Flash Memory (Boot-блок Флэш-память, сокращенно ББФП)
присуще блочное стирание данных и несимметричная блочная архитектура. Блоки
специализированы и имеют разные размеры. Среди них имеется так называемый Boot-блок
(ББ), содержимое которого аппаратно защищено от случайного стирания. В ББ хранится
программное обеспечение базовой системы ввода/вывода микропроцессорной системы BIOS
(Basic Input/Output System), необходимое для правильной эксплуатации и инициализации
системы.
В составе блоков имеются также БП (блоки параметров) и ГБ (главные блоки), не
снабженные аппаратными средствами защиты от непредусмотренной записи Блоки БП хранят
относительно часто меняемые параметры системы (коды идентификаторов, диагностические
программы и т. п.). Блоки ГБ хранят основные управляющие программы и т. п.
Микросхемы ББФП предназначены для работы с разными микропроцессорами и для
соответствия им имеют два варианта расположения ББ и адресном пространстве:, вверху и
внизу, что отображается в маркировке ИС буквами Т (Тор) или В (Boilom). На рис. 4.21, а для
примера приведена карта памяти (распределение адресного пространства) для ИС емкостью 4
Мбит с верхним расположением ББ.
В настоящее время выпускаются ББФП с емкостями 1... 16 Мбит, в последующих
поколениях ожидаются ИС с информационными емкостями до 256 Мбит.
По своему функционированию ББФП близки к памяти типа Bulk Erase, в обоих типах ИС
операции стирания/программирования ведутся под управлением
внутреннего
автомата,
входной информацией для которого служат команды, вводимые от процессора. В схемах
ББФП эту роль играет так называемый командный интерфейс пользователя CUI (Command User
lnterface).
Внешняя организация типичной ББФП показана на рис. 4.21, 6 на примере ИС с
информационной емкостью 4 Мбита. Адреса задаются 19-разрядным кодом A18-0, т. е. в
памяти хранится до 512 Кслов. Сигнал BYTE задает 8-разрядную или 16-разрядную
организацию памяти. При байтовой организации байты передаются по линиям DQ7-o, а линия
DQ15 играет роль самого младшего разряда адреса, определяющего, какой байт данной ячейки
передается (старший или младший). При словарной организации выводы DQ15-0 являются
линиями ввода-вывода данных.
Напряжение на выводе RP (Reset/Power Down) может иметь три уровня: 12 В ± 5%, уровень
логической единицы Н и низкий уровень L. При напряжении 12 В ± 5% ББ открыт и в нем
могут выполняться операции стирания и программирования. При напряжении ниже 6,5 В ББ
заперт.
Имея ряд режимов экономии мощности, схемы ББФП, в частности, реализуют режим APS
(Automatic Power Saving), благодаря которому после завершения цикла чтения схема
автоматически входит в статический режим с , потреблением тока около 1 мА, в котором
находится до начала следующего цикла чтения.
Когда схема не выбрана (при высоком уровне сигнала на выводе СЕ и выводе RP, т. е. СЕ =
RP = Н) потребление мощности снижается до уровня покоя (десятки мкА). При RP = L не
только запрещается запись, но и вводится режим глубокого снижения мощности, в котором ток
потребления снижается до долей мкА.
Активному режиму соответствует комбинация сигналов СЕ = L и RP = Н.
Сигналы ОЕ и WE имеют обычное назначение. Микросхемы Boot-блок флэш-памяти могут
работать с разными напряжениями питания и программирования (технология Smart Voltage),
имеют времена доступа при чтении 50...7О нс, токи активных режимов 15...25 мА и крайне
малые токи в режиме глубокого понижения мощности (около 0,2 мкА).
Файловая Флэш-память
Важное место в иерархии ЗУ занимает файловая Флэш-память (ФФП). В течение многих лет
хранение больших объемов данных возлагалось в микроЭВМ на хорошо отработанные и
сравнительно недорогие внешние ЗУ на магнитных, а впоследствии и оптических дисках. Во
многих компьютерах система памяти организована как сочетание жесткого магнитного диска
винчестера) с динамическим полупроводниковым ОЗУ. Инея значительные достоинства,
дисковые ЗУ как электромеханические устройства не свободны от ряда недостатков:
чувствительности к ударам и вибрациям, загрязнениям, ограниченного быстродействия и
значительного потребления мощности. Эти недостатки особенно сказываются в портативных
устройствах с автономным (батарейным) питанием. Достаточно отметить, что дисководы
потребляют в лучшем случае мощность около 3 Bт, что в системах с напряжениями питания
3,3...5 В означает потребление токов 0,6...0,9 А, быстро истощающих батарейки.
Файловая Флэш-память ориентирована на замену твердых дисков, которая в сотни раз
сокращает потребляемую мощность, в той же мере увеличивает механическую прочность и
надежность ЗУ, уменьшает их размеры и вес, на несколько порядков повышает быстродействие
при чтении данных, сохраняя при этом программную совместимость со средствами управления
памятью. Вместе с тем, за дисковой памятью остаются преимущества по информационной
емкости и стоимости.
Использование ФФП для замены дисковой памяти в портативных компьютерах — один из
важнейших факторов, способствующих развитию этого направления. При этом традиционное
сочетание "жесткий диск— динамическое ОЗУ" может заменяться сочетанием "Флэш-память
— статическое ОЗУ". Команды программы, хранимые в ФФП, читаются в этом случае непосредственно процессором, результаты тоже записываются прямо в ФФП а операции с
интенсивными вычислениями, требующие быстрейшего доступа к памяти и записи данных с
байтовой разрешающей способностью, выполняются с использованием быстродействующей
статической памяти. Накопитель ФФП делится на блоки, которые служат аналогами секторов
магнитных дисков, отражаемых в операционной системе MS-DOS Разработаны программные
средства, которые обеспечивают обмен между Флэш-блоками, подобно тому как операционная
система MS-DOS обеспечивает обмен между секторами диска.
Блоки ФФП идентичны и имеют одинаковую информационную емкость (симметричная
блочная архитектура). Так как в ФФП операции записи производятся значительно чаще, чем в
других разновидностях Флэш-памяти, этим операциям уделяется большое внимание —
вводятся страничные буферы, позволяющие с высокой скоростью накапливать некоторый
объем данных, подлежащих записи, для их последующей передачи в накопитель с меньшей
скоростью.
Микросхемы ФФП фирмы Intel имеют информационную емкость I 4...32 Мбит
при временах доступа 70... 150 не, напряжения питания 5; 3,3 I или даже 2,7 В. Они имеют
байтовую или управляемую разрядность (8 или 16), напряжение программирования у них
также, как правило, многовариантно(3,3;5; 12 В).
Внешняя организация ФФП показана на рис. 4.21, в, на примере микросхемы с
информационной емкостью 16 Мбит (ИС типа 28F016SA фирмы Intel).
Накопитель схемы с общей информационной емкостью 16 Мбит разбит на 32 блока по 64
Кбайт.
Поясним смысл некоторых выводов и сигналов. Шина адреса: линии А 2о-16 выбирают один
из блоков, линии А15-1 выбирают слово в пределах одного блока (блок с емкостью 64 Кбайта
содержит 32 Кслов), линия A0 — бит выборки байта, определяющий старший и младший байты
при байтовой организации памяти и отключаемый при ее словарной организации. От
процессора поступает начальный адрес блока данных, который запоминается в очереди
адресов. Текущий адрес ячейки памяти для обмена формируется адресным счетчиком.
В шине данных DQ15-0 линии DQ7-0 предназначены для ввода и вывода младшего байта
данных, передачи команды в командный интерфейс пользователя CU1 в цикле записи и вывода
данных из буфера, регистров идентификатора или состояния в соответствующих режимах
чтения. Линии D15-8 предназначены для передачи старшего байта при словарной организации
памяти. По ним выводят данные накопителя, буфера или идентификатора в соответствующем
режиме чтения, но эти линии не используются для чтения К из регистров состояния. Если
кристалл не выбран или запрещен вывод, линии шины данных переходят в третье состояние.
Линии СЕо и CEi — входы разрешения кристалла, при высоком уровне любого из них
кристалл не выбран, и потребление мощности снижается до уровня состояния покоя (Standby)
после завершения текущей операции записи или стирания.
Сигнал ОЕ открывает выходные буферы при низком уровне и переводит их в третье
состояние при высоком.
Сигнал WE управляет доступом к командному интерфейсу пользователя CUI, I страничным
буферам, регистрам очереди данных и защелкам очереди адресов.
Сигнал RP (Reset/Power-Down) при низком уровне вводит схему в состояние глубокой
экономии мощности, отключая вес схемы, потребляющие статическую мощность. При выходе
из этого состояния время восстановления I схемы составляет 400 не. При переходе к низкому
уровню операции автомата записи прекращаются, схема сбрасывается.
Сигнал RY/BY (Ready/Busy) индицирует состояние внутреннего автомата записи. Низкий
уровень означает занятость, высокий (кстати говоря, сигнал вырабатывается каскадом с
открытым стоком, требующим подключения внешней цепочки Ucc— R для формирования
высокого уровня) означает или готовность к новым операциям, или приостановление стирания,
или состояние глубокой экономии мощности в зависимости от выполняемой операции.
Сигнал WP (Write Protect) имеет следующий смысл. Каждый блок имеет бит запрещения
записи (Lock-bit). Низкий уровень WP разрешает защиту, т- е. запись или стирание в блоке
могут выполняться только при Lock-bit = 0. При высоком уровне WP в блоках могут
выполняться операции записи и стирания независимо от состояния блокирующих битов.
Сигнал BYTE низким уровнем вводит схему в байтовый режим, высоким - в словарный и
выключает буфер линии Ао.
Напряжение программирования Upp и вывод напряжения питания (это может быть 3,3 или 5
В — вход обозначен дробью 3/5) поступают в схему мере: переключатель напряжения, который
находится внутри схемы.
Для примера приведем параметры ФФП фирмы lntel/28F032SA (1997 г.):
- организация 2М*16 или 4Мх8 (по выбору потребителя), напряжение питания 3,3 или 5 В
(по выбору потребителя), напряжение программирования 12 В, до I06 циклов стирания на блок,
64 независимо запираемы* блока по 64 Кбайт или 64 блока по 32 Кслов;
- корпус типа TSOP размерами 1,2x14x20 мм с 56 выводами;
- технология с топологической нормой 0,6 мкм
- время доступа при чтении 70 или 150 не при питании от 5 В и 3 В соответственно;
- время записи слова/байта не более 9 мкс;
- время записи блока не более 2,1 с для байтового режима и не более 1 с для словарного
режима;
- время стирания блока не более 10 с и стирания кристалла не более 25,6 с.
Память типа StrataFlash
В 1997 г. компания Intel представила новый вид Флэш-памяти, названный Стратафлэш
(StrataFlash), в которой впервые в одном элементе памяти хранятся два бита, а не один. Это
обеспечивается тем, что в плавающем затворе транзистора фиксируется не только наличие или
отсутствие заряда, но и определяется его величина, которая может иметь несколько значений.
Различая четыре уровня, можно хранить в одном элементе два бита.
До изобретения памяти Стратафлэш для увеличения емкости ЗУ шли путем уменьшения
размеров схемных элементов и других усовершенствований технологических процессов
литографии. СтратаФлэш ознаменовала другой подход к этой проблеме. Хранения двух битов
добились практически в тех же запоминающих элементах, которые ранее хранили один бит,
преодолев трудности ужесточения допусков на величины вводимых в плавающий затвор
зарядов. Во второй половине 90-х гг. появились коммерческие образцы памяти СтратаФлэш.
При этом от емкости 32 Мбита перешли к емкости 64 Мбита без заметных изменений площади
кристалла.
Запоминающие элементы программируются введением в плавающий затвор одного из 4-х
количеств заряда, каждое из которых соответствует паре двоичных цифр II, 10, 01, 00. В
зависимости от заряда, запоминающий транзистор имеет одно из четырех пороговых
напряжений. При считывании информации к затвору транзистора прикладывают напряжение
считывания.
Ток запоминающего транзистора зависит от порогового напряжения. Определяя ток, можно
выявить состояние плавающего затвора.
На рис. 4.22 показаны распределение пороговых напряжений в четырех-уровневом
запоминающем элементе (а) и схема чтения состояния запоминающего транзистора (б).
§4.5 Использование программируемых ЗУ для решения задач обработки информации
В предыдущих параграфах запоминающие устройства рассматривались с точки зрения
основной для них задачи хранения информации. Однако программируемая память есть также
универсальное средство решения самых разных задач обработки информации. Применимость
этого средства в указанной области определяется возможностью представления решения задачи
в табличной форме. Эта форма решения возможна для задач самого разного характера.
Для уяснения возможностей ППЗУ в области решения задач обработки информации
целесообразно рассмотреть основные соотношения, связанные с воспроизведением логических
и числовых функций.
Реализация логических (переключательных) функций
ППЗУ с организацией 2П1х1 принимает m-разрядный адрес и выдает одноразрядный
результат (0 или 1). Этот способ функционирования непосредственно воспроизводит
переключательную функцию m переменных, т. к. для каждого входного набора можно при
программировании ЗУ назначить необходимую выходную переменную. Например. ППЗУ с
организацией 1024x1 может быть использовано для воспроизведения переключательной
функции 10 аргументов.
ППЗУ с организацией 2тхп по поступающему на его вход т-разрядному адресу выдает nразрядное выходное слово, хранящееся в ячейке с данным адресом. Такое ЗУ воспроизводит
систему переключательных функции, число которых равно разрядности выходного слова.
Действительно, на каждом выходе может быть воспроизведена любая переключательная
функция т-аргументов, а совокупность выходов даст п различных функций.
В ППЗУ функции реализуются в совершенной дизъюнктивной нормальной форме, для
каждой возможной конъюнкции имеется свое оборудование (выходная линия дешифратора
адреса) и, следовательно, она может быть введена в выходную функцию. Какой-либо
минимизации функций при подготовке задачи к решению на основе НИЗУ не требуется, более
того, если функции уже минимизированы, то для удобства подготовки данных для
программирования ЗУ их придется развернуть до самой громоздкой формы (СДНФ). Это
делается либо заполнением карты Карно и последующей записью функции без какого-либо
объединения единиц, либо введением в каждую конъюнкцию недостающих переменных х\
путем домножения конъюнкции на равные единице выражения xs Vxi с последующим
раскрытием скобок (X; — вводимая переменная). Пример приведения функции в СДНФ:
F= XiVx2X3 = XI(x2VX2)(X3\/X3)\/(Xi\/XI)X2X3 = Х1Х2Х3\А1Х2Х3\/Х,Х2Хз\/Х1Х2Хз\/х,Х2Хз.
Для воспроизведения этой функции по пяти конъюнкциям-адресам в ППЗУ следует записать
единицы, по остальным адресам — нули.
Реализация функции в СДНФ определяет большие затраты элементов памяти, однако цена
элемента памяти значительно ниже цены логического элемента, поэтому даже при
избыточности числа элементов памяти в несколько раз (в сравнении с числом логических
элементов, необходимых лля воспроизведения функции традиционным методом) реализация на
ППЗУ может оказаться выгодной.
Особенности ППЗУ указывают на целесообразность его использования для реализации в
первую очередь функций, не поддающихся существенной минимизации.
Пи этом время выполнения операции — время считывания данных из ЗУ.
Реализация конечных автоматов
В канонической схеме автомата ППЗУ может заменить комбинационную цепь, поскольку
оно способно воспроизводить переключательные функции. Поэтому структура автомата без
потери общности может быть представлена I также в виде, приведенном на рис. 4.23.
Начальная установка регистра задает исходное состояние элементов памяти (автомата). По
этому состоянию и входным сигналам из памяти считывается код нового состояния и функции
выхода. В следующем такте эти процессы повторяются. В каждом очередном такте автомат
переходит в новое состояние и вырабатывает выходные функции согласно таблицам переходов
и выходов.
Емкость ППЗУ определяется объемом таблиц, задающих функционирование автомата.
Сведя таблицы переходов и выходов в одну, получим общее число входов m = k + q и число
выходов п = р + q следовательно, для реализации автомата требуется емкость памяти М = 2 к+ч(р
+ q).
Воспроизведение арифметических операций и функциональных зависимостей
Арифметические операции и числовые (не логические) функции часто I встречаются в
качестве задач, решаемых цифровыми устройствами. Функции задаются аналитически или
таблично.
Для функций одного аргумента объем памяти таблиц легко вычислить, *нан разрядности
аргумента и функции. При задании аргумента т-разрядным кодом число точек, в которых
задана функция, составит 2т (рис. 4.24, а). I Если разрядность кода, представляющего функцию,
равна п, то, очевидно, емкость памяти в битах будет равна n2m.
С ростом числа аргументов объем памяти для запоминания таблиц функций быстро растет.
Для функции двух аргументов разрядностей m число точек, в которых задана функция,
определится как произведение чисел точек по каждой из координат и составит 22т (рис. 4.24, б).
Объем памяти таблицы и этом случае составит М = n22m.
Для функций f аргументов М =n2fm
Итак, с ростом разрядности слов и числа аргументов функций объем памяти таблиц быстро
растет и чисто табличный метод решения задачи становится неприемлемым. В этих случаях
часто очень полезны таблично-алгоритмические методы, в рамках которых можно существенно
снизить объем таблиц, введя небольшое число простых операций над данными.
Для произвольных функций f(x) простейший таблично-алгоритмический метод — кусочнолинейная аппроксимация, когда запоминаются только узловые значения функции, а в
промежутках между узлами функция вычисляется в предположении, что на промежутках она
изменяется линейно. Число узлов назначается по соображениям точности линейной
аппроксимации функции на участках. Кусочно-линейной аппроксимации с постоянным шагом
соответствуют следующие представления аргумента и функции:
x = Xi+Ax, f(x)=f(xj)+Af(xi)Axh_I,
где Xj — координата i-й узловой точки; Дх — разность значений х и координаты
ближайшей слева узловой точки; Af(xs) — приращение функции на участке от XJ до x,+ i; h —
шаг аппроксимации (для удобства реализации цифровыми методами шаг берут равным целой
степени числа 2).
ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
6.1. Общие сведения
Принцип действия непрерывных (линейных) стабилизаторов напряжения с последовательным
регулирующим элементом, состоит в том, что при изменении входного напряжения и/или тока
нагрузки выходное напряжение стабилизатора (напряжение на нагрузке) поддерживается
постоянным за счет изменения падения напряжения на регулирующем элементе. Разность между
входным и выходным напряжениями падает на мощном регулирующем транзисторе и в
зависимости от схемы его включения и диапазона изменения входного напряжения может
достигать нескольких вольт. Как следствие при протекании тока нагрузки на этом транзисторе
рассеивается довольно большая мощность. Это предопределяет относительно невысокий коэффициент полезного действия (КПД) линейного стабилизатора, который в случае низких
напряжениях стабилизации может падать даже ниже 50%.
Существенно больших значений КПД можно достичь, если вместо непрерывного
регулирующего элемента между входным напряжением и нагрузкой включить импульсный
коммутатор (ключ), который циклически (с определенным периодом повторения 7) переключается
из разомкнутого (закрытого) состояния в замкнутое (открытое) и обратно. В этом случае среднее
значение выходного напряжения на нагрузке будет определяться отношением длительности tOPEN
его открытого состояния к периоду повторения. Таким образом, меняя относительную
длительность открытого состояния ключа, можно в широких пределах регулировать среднее
значение напряжения на нагрузке. Если между коммутатором и нагрузкой включить
соответствующий фильтр нижних частот, можно сгладить пульсации напряжения на нагрузке до
необходимой величины.
Вполне очевидно, что при малом сопротивлении ключа в открытом состоянии (в идеале оно
может быть очень близко к нулевому), потери мощности на таком регулирующем элементе весьма
малы, и на практике КПД здесь может достигать 95% и более.
Источники питания с коммутаторами называют импульсными источниками питания, а если
они осуществляют стабилизацию выходного напряжения, то импульсными стабилизаторами
напряжения. По сравнению с непрерывными стабилизаторами напряжения импульсные источники
обладают не только существенно более высоким КПД, но дополнительно позволяют получить:
• выходное напряжение больше входного;
• выходное напряжение обратной полярности по отношению к входному;
• выходное напряжение, гальванически не связанное с входным;
• стабилизацию выходного напряжения при широком (более 50%) диапазоне изменения
входного;
• при выходной мощности в десятки и более ватт — существенно меньшие массу и габариты.
Недостатками ИМС импульсных источников являются:
• импульсный характер напряжений и токов в схеме, что обуславливает порой весьма
интенсивные помехи в нагрузке, в первичном источнике питания и в окружающем пространстве и
требует применения сложных сглаживающих фильтров, тщательного экранирования и детальной
проработки конструкции;
• определенные сложности с обеспечением устойчивости импульсных устройств с обратной
связью;
• относительно большая (по сравнению с непрерывными устройствами) длительность
переходных процессов;
• наличие внешних компонентов.
Классификация импульсных источников питания приведена на Рис. 6.1.
Импульсные источники питания отличаются большим многообразием принципов построения и
схемных решений. Ниже мы рассмотрим наиболее распространенные типы микросхем
импульсных источников питания с промежуточными накопителями энергии и без
промежуточного накопления энергии.
Для импульсных источников питания с промежуточными накопителями характерна работа в
два такта, в одном из которых происходит накопление энергии в индуктивной катушке (дросселе)
или конденсаторе, а во втором — передача энергии в нагрузку. Изготовить индуктивную катушку
или конденсатор сравнительно большой емкости методами интегральной технологии не удается,
поэтому практически все импульсные интегральные источники питания имеют внешние
компоненты.
6.2. Понижающий импульсный стабилизатор
6.2.1. Схема понижающего импульсного стабилизатора напряжения
На Рис. 6.2 показана схема понижающего импульсного стабилизатора напряжения (ИСН).
Транзистор КГ переключается из полностью открытого в полностью закрытое состояние с
частотой в десятки, сотни килогерц или даже единицы мегагерц. Когда транзистор открыт, ток от
первичного источника энергии через дроссель поступает в нагрузку. При этом ток / L растет и как
следствие происходит накопление энергии в дросселе. Когда транзистор закрыт, ток / L протекает
через диод VD, продолжая питать нагрузку При этом ток катушки уменьшается и энергия,
накопленная в дросселе в предыдущем такте, расходуется на поддержание напряжения на
нагрузке Vout. Соотношение открытого и закрытогогсо-стояний ключа определяет величину
напряжения VOUT
На Рис. 6.3 представлена блок-схема устройства управления стабилизатором напряжения.
Устройство управления осуществляет сравнение выходного напряжения с опорным; если
выходное напряжение уменьшается по сравнению с опорным, то модулятор устройства
управления увеличивает отношение времени открытого состояния транзистора topen к периоду
импульсов стабилизатора Т, называемое относительной длительностью импульса
При увеличении (уменьшении) V0VT от номинального значения модулятор уменьшает
(увеличивает) значение у. В отечественной литературе этот параметр называют также
коэффициентом заполнения, а в английском обозначают термином duty cycle (относительный
рабочий интервал).
Принцип действия модулятора определяется законом модуляции. В импульсных
стабилизаторах наиболее часто применяют широтно-импульсную или частотно-импульсную
модуляции. Если регулируется время открытого состояния, т. е. ширина импульсов, при
постоянной частоте следования импульсов, то имеет место широтно-импульсная модуляция
(ШИМ). Если относительная длительность импульса у регулируется путем изменения частоты
следования импульсов, то такая модуляция называется частотно-импульсной модуляцией (ЧИМ).
Наиболее просто модулятор реализуется в виде релейного регулятора на основе компаратора с
гистерезисом. Схема понижающего стабилизатора с релейным регулятором приведена на Рис. 6.4.
Частота импульсов в этом случае определяется свойствами элементов, входящих в контур
регулирования, и может быть найдена по формуле
где Rэп — эквивалентное последовательное сопротивление конденсатора, VG — ширина петли
гистерезиса компаратора. Таким образом, частота переключения может быть задана выбором
величины гистерезиса. Ширина петли гистерезиса определяет также и амплитуду пульсаций
выходного напряжения.
Сильная зависимость частоты коммутации ключа от входного напряжения, ограничивает
применение релейных регуляторов в промышленных контроллерах импульсных стабилизаторов.
Тем не менее некоторые фирмы выпускают такие регуляторы. Так, например, Texas Instruments
производит ИМС контроллеров понижающих стабилизаторов TPS5210 и TPS5211, содержащие
релейные регуляторы, ширина петли гистерезиса, в которых может быть установлена
пользователем. Эти стабилизаторы предназначены для питания старших поколений процессоров
типа Pentium-Ill. Их входное напряжение стабилизировано на уровне 12 В, поэтому частота
коммутации меняется мало и устанавливается около 200 кГц.
Ток, потребляемый понижающим стабилизатором от первичного источника постоянного тока,
имеет выраженный импульсный характер с большими скоростями нарастания и спада. Это может
заметно влиять на работу других потребителей, питаемых от этого же источника. Поэтому на
входе импульсного стабилизатора обычно включают Г-образный LC-фильтр.
Примером понижающего импульсного стабилизатора с ШИМ может служить ИМС МАХ758А
фирмы Maxim, преобразующая нестабильное напряжение постоянного тока 6...16 В в постоянное
напряжение 5 В при токе нагрузки до 750 мА. Кристалл размером 3.3x3 мм в 8-выводном корпусе
содержит не только устройство управления, но и коммутирующий МОП-транзистор, имеющий
типичное сопротивление открытого канала 0.5 Ом. Диод, дроссель и конденсатор — внешние.
КПД устройства при токе нагрузки в 100мА составляет 91%. Ток, потребляемый на холостом
ходу, не более 1.7 мА. Способ регулирования — ШИМ на частоте около 160 кГц. Устройство
управления ограничивает выходной ток и контролирует напряжение первичного источника тока.
Более мощным стабилизатором является микросхема МАХ787, которая преобразует входное
постоянное напряжение от 6 до 60 В в стабилизированное напряжение 5 В при токе нагрузки до 5
А. Способ регулирования — ШИМ на частоте 100 кГц.
Для построения стабилизаторов напряжения еще больших мощностей выпускаются
микросхемы устройств управления (контроллеров), предназначенные для управления мошными
МОП-ключами. Например, ИМС МАХ796 управляет импульсным стабилизатором на напряжение
5 В при токе нагрузки до 10 А. Способ регулирования — ШИМ на частоте 150 или 300 кГц.
6.2.3. Понижающие ИСН с синхронными выпрямителями
В последние годы имеет место устойчивая тенденция к снижению напряжения питания
микросхем. Одновременно появляются модели ИМС, потребляющие ток все большей силы.
Например, процессор фирмы AMD Athlon потребляет ток до 40 А при напряжении 1.6 В. В этом
случае традиционное решение — последовательный ключ на МОП-транзисторе и диод Шоттки
параллельно выходу — оказывается неэффективным, так как, хотя прямое напряжение на диоде
Шоттки составляет примерно 0.4 В, что значительно ниже, чем на обычном кремниевом диоде, все
же мощность потерь в нем достигнет 10 Вт, что потребует принудительного обдува либо
радиатора больших размеров.
Лучшие результаты в импульсных стабилизаторах низкого напряжения дает применение
синхронных выпрямителей, в которых диод заменяется или шунтируется параллельным ключом на
МОП-транзисторе (Рис. 6.7).
Контроллер управляет транзисторами VT1 и VT2 противофазно, т. е. если первый транзистор
открыт, то второй закрыт и наоборот. Когда открыт VT1 нагрузка преобразователя через дроссель
подключена к входу схемы и наряду с питанием происходит накопление энергии в дросселе.
Когда открыт VT2, дроссель включен параллельно нагрузке и отдает ей часть своей энергии.
Потери мощности в МОП-транзисторе пропорциональны сопротивлению открытого канала.
Выбрав транзистор с достаточно малым сопротивлением открытого канала или включив
параллельно несколько МОП-транзисторов, можно снизить потери мощности до весьма малых
величин. Промышленность выпускает ряд ИМС преобразователей с синхронными
выпрямителями, как с внутренними МОП-ключами (МАХ887 на ток до 0.6А, МАХ1623 на ток до
ЗА), так и для управления внешними МОП-транзисторами (МАХ798, TPS2830, двухканальный
LTC1702 и др.). КПД некоторых из этих преобразователей при питании нагрузки напряжением 1.6
В достигает 96%. Фирма International rectifier выпускает МОП-транзисторы, оптимизированные
для применения в схемах низковольтных синхронных выпрямителей. Например, транзистор
IRF7456 на ток 13 А и допустимое напряжение сток—исток 20 В в открытом состоянии имеет
сопротивление канала не более 6.5 мОм, располагается в миниатюрном корпусе SO-8 и не требует
радиатора для охлаждения. Сборка IRF7901D1, предназначенная для построения синхронных
выпрямителей на ток до 5 А, содержит два МОП-транзистора, включенных последовательно,
причем транзистор, предназначенный для включения параллельно выходу, зашунтирован диодом
Шоттки. Сопротивление открытого канала этого транзистора не превышает 0.023 Ом. Сборка
также выполнена в корпусе SO-8. Применение синхронного выпрямителя позволяет наряду с повышением КПД устранить также режим прерывистого тока даже при малых нагрузках, что
улучшает регулировочные свойства преобразователей. Это достигается за счет того, что при
малых токах дросселя ток, достигнув нуля, не прекращается, как в схеме с диодом, а меняет
направление. При этом он протекает по цепи сток—исток транзистора VT2 (см. Рис. 6.7).
Для питания высокопроизводительных процессоров типа Pentium-Ill и аналогичных ему по
классу некоторые фирмы выпускают ИСН с цифровым управлением. Например, National
Semiconductor производит семейство понижающих стабилизаторов LM2636/7/8 с синхронными
выпрямителями, выходное напряжение которых устанавливается с помощью 5-разрядного ЦАП.
Стабилизатор управляется от процессора, который в зависимости от своей загрузки может изменять напряжение питания вычислительного ядра от 1.3 до 3.5 В.
6.3. Повышающий импульсный стабилизатор
В рассмотренной выше на Рис. 6.2 схеме стабилизатора выходное напряжение всегда ниже
входного. Изменив расположение элементов в схеме, можно, используя свойство самоиндукции,
получить выходное напряжение большее, чем входное (Рис. 6.11).
Когда транзистор VT открыт, к дросселю L приложено входное напряжение VIN. В этом случае
согласно закону электромагнитной индукции
Vin = L(dIL/dt),
(6.10)
и ток в дросселе будет расти, увеличивая запасаемую в нем энергию (Рис. 6.12).
К диоду VD будет приложено запирающее напряжение, и ток нагрузки будет поддерживаться
за счет разряда конденсатора С. После запирания транзистора потенциал на его коллекторе
поднимается до величины, превышающей выходное напряжение, за счет ЭДС самоиндукции
дросселя. Диод откроется. Ток в дросселе при этом будет убывать, и его энергия, запасенная в
первом такте, вместе с энергией, поступающей от первичного источника, будет питать нагрузку и
заряжать конденсатор. Скорость изменения тока на этом такте определяется соотношением (6.3).
Приращение тока в первом такте равно убыли тока во втором:
Откуда следует
Выражение (6.12) представляет собой регулировочную характеристику повышающего
преобразователя, график которой приведен на Рис. 6.13.
Формула (6.12) справедлива, если только в течение периода коммутации ток дросселя нигде не
достигает нуля. В противном случае выходное напряжение будет больше, чем величина,
рассчитанная по этой формуле. При работе нерегулируемого импульсного преобразователя
данного типа на холостом ходу его напряжение может возрасти до опасных значений!
Примером ИМС повышающего импульсного стабилизатора может служить микросхема
МАХ856 фирмы Maxim, преобразующая постоянное нестабилизированное напряжение от 0.8 до 6
В в постоянное напряжение 5 В при токе нагрузки до 100 мА. Кристалл размером 2.1 х 1.5 мм в
восьмивыводном корпусе содержит устройство управления и коммутирующий МОП-транзистор.
Диод, дроссель и конденсатор — внешние. КПД устройства при токе нагрузки в 40 мА достигает
85%. Ток, потребляемый самой микросхемой, составляет не более 25 мкА. Способ регулирования
— ЧИМ, при частоте до 500 кГц. Устройство управления ограничивает входной ток величиной 0.5
А и контролирует напряжение первичного источника тока.
Для повышения КПД при преобразовании низких напряжений в этой схеме вместо диода также
можно использовать синхронный выпрямитель на МОП-транзисторе. На Рис. 6.14 приведена
схема повышающего преобразователя с синхронным выпрямителем.
МОП-транзисторы — n-канальный VT1 и p-канальный VT2 — переключаются в проти-вофазе.
Прямое падение напряжения на открытом транзисторе VТ2 значительно меньше, чем на диоде,
даже если это диод Шоттки.
Другое достоинство этой схемы — ток через дроссель не прерывается. В фазе, когда
транзистор VТ2 открыт, ток дросселя, снизившись до нуля, затем меняет свое направление и
начинает течь от нагрузки к источнику. Часть энергии от нагрузки возвращается источнику, т. е.
имеет место реактивный обмен или рекуперация энергии. Формула (6.12) в этом случае
справедлива для любого тока нагрузки, и перенапряжения на холостом ходу не происходит.
Реактивный обмен не всегда желателен, поэтому некоторые ИМС контроллеров для
управления импульсными стабилизаторами напряжения содержат цепи контроля, которые при
снижении тока дросселя до установленного порогового уровня обеспечивают запирание
транзистора VT2.
Примером повышающего преобразователя с синхронным выпрямителем может служить
микросхема МАХ1703, которая содержит на кристалле помимо устройства управления и
коммутирующего n-канального МОП-транзистора также и синхронный выпрямитель на pканальном МОП-транзисторе, выполняющий функцию диода. Поэтому внешние компоненты —
только дроссель и конденсатор. Эта ИМС работает при входном напряжении 0.7...5.5 В и обеспечивает напряжение на нагрузке 5 В ± 4% при токе до 1.5 А.
6.4. Инвертирующий импульсный стабилизатор
Схемы понижающего и повышающего преобразователей, рассмотренные выше в пп. 6.2 и 6.3,
считаются базовыми [6.5]. Они являются тем фундаментом, на котором можно построить более
сложные схемы преобразователей постоянного напряжения. Простейшая составная схема,
представляющая собой комбинацию двух указанных преобразователей, представлена на Рис. 6.15.
Здесь регулирующий транзистор включен последовательно с первичным источником, как в
схеме понижающего преобразователя, а диод, через который протекает ток при запертом
транзисторе, — последовательно с нагрузкой, как у повышающего преобразователя.
Когда транзистор VT открыт, диод VD закрыт, и к дросселю L приложено входное напряжение
VIN. В этом случае согласно закону электромагнитной индукции в соответствии с
формулой (6.10) ток в дросселе будет расти, увеличивая в нем энергию. Нагрузка питается за
счет разряда конденсатора С. Во втором такте, после запирания транзистора, ток продолжает течь
через дроссель и через открывшийся диод заряжает конденсатор в направлении, противоположном
полярности входного напряжения. Скорость уменьшения тока определяется в этом случае
формулой (6.2). Приращение тока в первом такте равно убыли тока во втором:
Откуда следует
Выражение (6.5) представляет собой регулировочную характеристику инвертирующего
преобразователя, график которой приведен на Рис. 6.16.
Формула (6.13) справедлива только для режима непрерывного тока дросселя.
Таким образом, на выходе инвертирующего импульсного стабилизатора напряжение не только
имеет полярность, обратную полярности входного напряжения, но в зависимости от
относительной длительности импульса может быть как больше, так и меньше входного. Последнее
обстоятельство заметно расширяет область применения инвертирующего преобразователя.
Примером ИМС инвертирующего импульсного стабилизатора может служить микросхема
МАХ764 фирмы Maxim, преобразующая постоянное нестабильное напряжение 3... 16 В в
постоянное напряжение —5 В при токе нагрузки до 250 мА. Кристалл размером 3.7 х 2 мм в
восьмивыводном корпусе содержит устройство управления и коммутирующий МОП-транзистор.
Диод, дроссель и конденсатор — внешние. КПД устройства при токе нагрузки в 200 мА достигает
80%. Ток, потребляемый самой микросхемой, составляет не более 90 мкА. Способ регулирования
— ЧИМ, при частоте импульсов до 300 кГц. Устройство управления ограничивает входной ток величиной 0.75 А.
Фирма National Semiconductor производит ИМС LM2524D, которая может быть включена по
схеме повышающего, понижающего или инвертирующего стабилизаторов напряжения.
Максимально допустимый ток силовых ключей невелик (80 мА), поэтому для умощнения следует
подключить внешние транзисторы. Упрощенная схема ИМС представлена на Рис. 6.17.
Микросхема содержит усилитель ошибки У, источник опорного напряжения ИОН,
управляющую логику, силовые ключи VT1 и VT2, а также широт-но-импульсный модулятор,
включающий генератор пилообразного напряжения, компаратор КН и RS-триггер Тг1.
Триггер Тг2 обеспечивает поочередное открывание ключей, причем относительная
длительность открытого состояния каждого ключа у < 0.5. Это позволяет использовать эту ИМС
для построения как двухтактных (инвертирующих), так и однотактных схем. В последнем случае
транзисторы VT1 и VT2 включаются параллельно. При этом общая относительная длительность
открытого состояния такого составного ключа может приближаться к единице.
6.6. Инверторные схемы
6.6.1. Общие сведения
Рассмотренные в разделах 6.2...6.4 однокаскадные (несоставные) преобразователи постоянного
напряжения имеют ряд ограничений при практическом использовании. В частности, наличие в
них гальванической связи между входом и выходом не позволяет применять такие
преобразователи в тех случаях, когда такая связь не допускается. Другим ограничением является
то, что при заданном диапазоне изменения входного напряжения питания возможный диапазон
изменения выходного напряжения имеет вполне определенные пределы. То есть нецелесообразно
пытаться получить с помощью рассмотренных выше схем напряжения в сотни вольт из
напряжений в единицы вольт, и наоборот. Указанные недостатки преобразователей постоянного
напряжения можно устранить, если дополнить их неким устройством, играющим роль
трансформатора постоянного напряжения (ТПН).
Идеальный ТПН должен обеспечивать передачу постоянного напряжения с постоянным
коэффициентом трансформации, высокую степень изоляции между первичной и вторичной
цепями, передачу энергии в любом из двух направлений и, наконец, возможность построения
системы преобразования энергии с несколькими входами или выходами. Очевидно, что все
перечисленные свойства идеального ТПН в реальном ТПН реализованы быть не могут, но этого и
не требуется для практических целей.
На Рис. 6.25 представлена функциональная схема наиболее широко применяемого ТПН.
Функции отдельных звеньев ТПН вполне очевидны. Инвертор преобразует входное постоянное
напряжение в переменное напряжение прямоугольной формы высокой частоты. Трансформатор
Тр обеспечивает повышение или понижение переменного напряжения и гальваническое
разделение первичной и вторичной цепей. Выпрямитель вновь преобразует переменное
напряжение в постоянное. Отметим, во-первых, что при необходимости инвертор может быть
использован для регулирования средневыпрямленного значения выходного напряжения, а вовторых, что при использовании в данном ТПН неуправляемого выпрямителя на диодах обратная
передача энергии от вторичной цепи к первичной невозможна. Как правило, между выпрямителем
и нагрузкой включается LC-фильтр, который обеспечивает не только сглаживание пульсаций, но и
ограничение скорости нарастания тока через силовые ключи инвертора.
Самым сложным узлом ТПН, во многом определяющим его свойства, является инвертор,
изучением которого мы сейчас и займемся.
Инверторами называют преобразователи постоянного тока в переменный. Вообще семейство
инверторов довольно обширно и включает устройства различного назначения, рассчитанные на
передачу мощности от долей ватта до многих мегаватт (точнее, мегавольтампер). Далее будет
рассмотрено несколько простых схем высокочастотных инверторов малой мощности на основе
различного типа транзисторов, наиболее широко применяемых в составе источников питания для
электронной аппаратуры.
6.6.2. Нерегулируемые инверторы
Нерегулируемый инвертор представляет собой наиболее простой тип инвертора. Это
устройство преобразует постоянное напряжение в колебания прямоугольной формы. Чаще
используются так называемые двухтактные инверторы, формирующие симметричные колебания,
в идеале с нулевым средним значением. Эти инверторы состоят из двух симметричных частей. Их
достоинством является наиболее полное использование выходного трансформатора за счет
симметричного намагничивания его сердечника. В преобразователях малой мощности находят
применение также однотактные инверторы. Они проще устроены, но эффективность
использования выходного трансформатора в них значительно ниже.
Нерегулируемые инверторы подразделяются по способу возбуждения колебаний нa две
группы: инверторы с независимым (внешним) возбуждением и инверторы с самовозбуждением.
Инверторы с самовозбуждением (генераторы Роера и Енсена) прежде довольно широко
применялись для построения импульсных источников питания мощностью до десятков ватт.
Однако для этих схем характерны сложности с обеспечением устойчивости самовозбуждения и
низкий КПД. Их достоинство — схемотехническая простота — с развитием интегральной
схемотехники потеряло свое значение для разработчиков, поэтому в настоящее время в новых
разработках применяются почти исключительно инверторы с внешним возбуждением.
Прежде чем начать изучение ИМС контроллеров нерегулируемых двухтактных инверторов,
рассмотрим схемы их силовых частей. На Рис. 6.26 приведены основные схемы силовых частей
инверторов.
Наименьшее количество элементов содержит так называемая нулевая схема, в которой один из
выводов входного источника питания соединен с отводом от средней — нулевой — точки
первичной обмотки трансформатора (Рис. 6.26а). Ключи S1 и S2 поочередно замыкаются и
размыкаются. При этом к соответствующим первичным полуобмоткам трансформатора
прикладывается входное напряжение. Намагничивающие силы полуобмоток направлены в
магнитопроводе в противоположные стороны, поэтому постоянное подмагничивание в идеале
отсутствует. Трансформатор объединяет полуволны одного цикла коммутации и повышает или
понижает их амплитуду в соответствии со своим коэффициентом трансформации. Недостатком
этой схемы является повышенное напряжение на закрытом ключе. Действительно, за счет
включения полуобмоток с отводом от средней точки к закрытому ключу прикладывается напряжение, равное 2VIN. Поэтому такую схему, как правило, применяют для преобразования
относительно низких напряжений. Другой недостаток — менее эффективное, чем у двух других
схем, использование трансформатора.
Полумостовая схема (Рис. 6.266) широко применяется для построения сетевых источников
питания небольшой мощности (до сотен ватт). Входное напряжение делится пополам с помощью
конденсаторов. Ключи также переключаются поочередно. При замыкании одного из ключей к
первичной обмотке трансформатора прикладывается напряжение, равное V1N/2, поэтому для
передачи той же мощности, что и в предыдущей схеме, через ключи должен протекать вдвое
больший ток. Напряжение на закрытых ключах не превышает входное напряжение.
Мостовая схема (Рис. 6.26в) применяется для источников мощностью от сотен ватт и выше.
Ключи циклически меняют состояние: S1, S4 — замкнуты, S2, S3 — разомкнуты, и наоборот. К
первичной обмотке трансформатора всегда прикладывается полное входное напряжение.
Напряжение на закрытых ключах также не превышает входное напряжение.
Примером ИМС нерегулируемого нулевого инвертора может служить МАХ845. Эта
микросхема содержит задающий генератор, счетный триггер и два n-канальных МОП-транзистора
(Рис. 6.27).
Генератор в зависимости от состояния входа выбора частоты FS вырабатывает счетные
импульсы частотой 400 или 700 кГц.
Счетный триггер ТТделит эту частоту пополам и распределяет импульсы по затворам МОПтранзисторов. Допустимое напряжение сток—исток транзисторов всего 12 В, поэтому
номинальное напряжение питания составляет 5 В. Выходная мощность микросхемы не более 0.75
Вт. Ток собственного потребления не превышает 5 мА. Микросхема изготавливается в
миниатюрных корпусах SO-8 и MMAX размером 3x5 мм.
Другой пример — отечественная ИМС контроллера электронных пускоре-гулирующих
аппаратов компактных люминесцентных ламп 1211ЕУ1 [6.7]. Помимо своего основного
назначения, микросхема может использоваться в качестве нестабилизированного источника
постоянного напряжения, гальванически не связанного с источником входного напряжения.
Эта ИМС выполнена по КМОП-технологии и содержит высокочастотный генератор тактовых
импульсов, управляемый делитель частоты, формирователь импульсов, необходимых для
управления, два выходных драйвера и вспомогательную логику (Рис. 6.28).
Частота генератора устанавливается выбором параметров цепи RsCs- Делитель частоты в
зависимости от уровня управляющего сигнала делит частоту сигнала генератора на 14 или 18, что
необходимо для управления режимом при пуске люминесцентной лампы. Формирователь
вырабатывает импульсы, управляющие выходными драйверами, причем в отличие от схемы
МАХ845 здесь формируется нулевая пауза («мертвое» время) между началом запирания
предыдущего ключа и отпиранием следующего. Это позволяет устранить сквозные токи и
уменьшить динамические потери.
Выходные драйверы представляют собой симметричные комплементарные каскады усиления
мощности. Такое построение позволяет быстро зарядить или разрядить входные емкости МОПключей, что необходимо для уменьшения динамических потерь. Это же дает возможность
подключать первичную обмотку трансформатора непосредственно к выходам драйверов (Рис.
6.29).
При этом выходные транзисторы ИМС образуют мостовую схему. Преобразователь без
внешних транзисторов может питать нагрузку мощностью до 1.5 Вт. Собственный ток
потребления (без учета тока нагрузки) зависит от частоты. Например, приf§= 10 кГц он составляет
всего 30 мкА, а при fs = 1 МГц — 2.5 мА.
6.6.3. Регулируемые инверторы
Регулирование выходного напряжения инверторов, применяемых в схемах преобразователей
постоянного напряжения, осуществляется в основном путем модуляции ширины выходных
импульсов при постоянной частоте коммутации. Схемы управления регулируемых
преобразователей значительно сложнее, чем нерегулируемых, поэтому именно такие схемы в
первую очередь начали выпускаться в интегральном исполнении.
Пионером в этой области микроэлектроники выступила фирма Silicon General (США),
выпустившая в 1976 г. семейство SG1524/2524/3524 (отечественный аналог — 1114ЕУ1),
разработанное Р. Маммансом. Двухтактный ШИМ-контроллер SG1524 помимо генератора
тактовых импульсов, счетного триггера и выходных драйверов, присущих ИМС нерегулируемых
инверторов, содержит также источник опорного напряжения (ИОН), компаратор, усилитель
ошибки и схему ограничения тока. Таким образом, эта ИМС представляет собой законченное
устройство для управления ключами регулируемого инвертора.
Менее чем через год после начала производства ИМС SG1524 фирма Texas Instruments начала
продавать микросхемы семейства TL493/494/495 (отечественные аналоги — 1114ЕУЗ/4/5),
разработанные Б. Холлондом. По сравнению с SG1524 этот контроллер дополнен схемой
формирования «мертвого» времени. Кроме того, схема ограничения тока заменена схемой
стабилизации тока. Эта ИМС и в настоящее время пользуется популярностью у разработчиков.
Она выпускается многими фирмами. Функциональная схема TL494 приведена на Рис. 6.30.
295
6.7. Сетевые источники питания 6.7.1. Общие сведения
Импульсные источники питания, получающие первичное напряжение от промышленной сети,
обладают значительно лучшими массогабаритными параметрами, чем обычные сетевые
источники питания той же мощности с низкочастотными силовыми трансформаторами. Этим
объясняется их широкое применение в блоках питания телевизоров, компьютеров и даже в
малогабаритных сварочных аппаратах. В то же время импульсные сетевые источники (ИСИ), как
правило, дороже, менее надежны, создают в первичной сети, в нагрузке и в окружающем
пространстве более интенсивные помехи и требуют от разработчика гораздо более высокой
квалификации.
При проектировании ИСИ решаются следующие задачи:
• выбор силовой схемы, обеспечивающей наилучшее использование трансформатора и
силового ключа при наименьшей их сложности и стоимости;
• защита силовых элементов от перегрузок;
• надежный плавный пуск преобразователя без перерегулирования по выходному
напряжению;
• минимизация потерь и повышение коэффициента полезного действия по мощности;
• организация обратной связи по напряжению с гальванической развязкой входной и
выходной цепей.
6.7.2. Импульсные сетевые источники на базе обратноходового преобразователя
Наиболее часто в качестве силовой схемы ИСИ мощностью до 100 Вт используется
обратноходовый преобразователь. Промышленность производит десятки типов ИМС
контроллеров для управления такими преобразователями. Это семейства TDA4605, AS2208,
LT1241, AN802x, ТЕА1504 и др.
Рассмотрим подробно работу типовой схемы обратноходового преобразователя с питанием от
сетевого напряжения. В качестве контроллера используется уже упоминавшаяся ИМС UC3844,
обеспечивающая управление МОП-транзистором с обратными связями по выходному
напряжению и по току дросселя. Внутренняя структура этой ИМС представлена на Рис. 6.52.
Микросхема содержит помимо основных узлов, уже представленных на Рис. 6.36, еще и
дополнительные элементы: цепь защиты контроллера от перенапряжения (встроенный
стабилитрон на 34 В) и компаратор для схемы UVLO, которая выключает контроллер при спаде
напряжения питания ниже допустимого уровня. Типовая схема включения этой ИМС в составе
обратноходового сетевого преобразователя представлена на Рис. 6.53.
Разберем подробнее работу этой схемы.
При включении источника в сеть конденсатор С 8, играющий роль фильтра, сглаживающего
пульсации выпрямленного сетевого напряжения, заряжается через выпрямительный мост.
Резистор Rn необходим для ограничения тока через диоды моста в момент включения источника.
Через резистор R$ начинает течь ток /ь заряжая конденсатор С4. Как только напряжение на выводе
7 микросхемы достигнет верхнего порога схемы UVLO, составляющего 16 В, контроллер
начинает генерировать импульсы, поступающие на затвор МОП-транзистора. Для того чтобы
контроллер запустился, достаточно, чтобы через резистор R5 протекал ток не более 1 мА.
Благодаря этому, сопротивление резистора R5 можно выбрать достаточно большим, с тем, чтобы
уменьшить рассеиваемую на нем
мощность. В то же время в рабочем режиме микросхема потребляет значительно больший ток
— до 17 мА. Поэтому после запуска контроллер питается в основном от дополнительной обмотки
WD.
Поскольку этот контроллер может работать с дополнительной обратной связью по току
дросселя (ДОСТД), сигнал этой связи снимается с резистора Rn, включенного в цепь истока
силового транзистора. Для подавления короткой импульсной помехи, возникающей при
отпирании транзистора за счет разряда его выходной емкости и межвитковой емкости обмотки
дросселя, в цепь ДОСТД включается малоинерционный фильтр R9C7. Цепочка R^C^VDj защищает
силовой транзистор от перенапряжения в момент его запирания.
Сигнал обратной связи по напряжению снимается в этой схеме с обмотки WD. Это позволяет
практически устранить возмущения, возникающие при изменении напряжения питающей сети.
Изменение тока нагрузки может вызвать заметные изменения выходного напряжения за счет
падения на сопротивлении вторичной обмотки трансформатора, активном сопротивлении обмотки
дросселя L\ и диоде VD5, поэтому лучше снимать сигнал обратной связи непосредственно с
нагрузки. Для этого в большинстве приложений желательно обеспечить гальваническую развязку
в канале обратной связи.
Таким образом, ИМС семейства UCx84x весьма универсальны. В перечень их применений
входят: однотактные понижающий, прямоходовый и обратноходовый стабилизаторы, а если их
дополнить микросхемой двухканального драйвера UC3706, то и двухтактные схемы. Платой за
такую универсальность является относительно сложная схема включения, содержащая много
навесных элементов. Более просто сетевой источник можно выполнить на основе специализированных ИМС, содержащих на кристалле силовой ключ и другие элементы, упрощающие
построение сетевого обратноходового источника. Одним из наиболее интересных в этом классе
микросхем является семейство трехвыводных преобразователей TOPSwitch фирмы Power
Integrations, содержащее модели PWR-TOP200/1/2/3/4 и другие. Эти ИМС, изготавливаемые в
корпусе
ТО-220, могут служить основой для построения сетевых источников питания с входным
переменным напряжением 100...230 В на мощности до 100 Вт. Блок-схема внутренней структуры
преобразователя PWR-TOP20x представлена на Рис. 6.54.
Микросхема представляет собой линейный преобразователь входного тока в коэффициент
заполнения у с автономным питанием и высоковольтным (до 700 В) МОП-транзистором с
открытым стоком на выходе. ИМС имеет внутренний ИОН, ШИМ-контроллер с встроенным
генератором 100 кГц, высоковольтные пусковые цепи питания, параллельный стабилизатор (он же
— усилитель ошибки) и схемы защиты.
Внутренние цепи защиты осуществляют поцикловое ограничение тока ключа, отключение его
при перегреве, при перенапряжении на выходе, при пониженном напряжении сети. В качестве
датчика для поциклового ограничения тока силового ключа используется сам ключ, имеющий
практически линейное сопротивление канала в открытом состоянии. Для повторного запуска
преобразователя после временного понижения питающего напряжения в состав микросхемы
входят цепи автоматического перезапуска, которые переводят преобразователь в режим генерации
коротких пачек импульсов с примерно в 20 раз более длительной паузой (режим «икоты»).
Одна из типовых схем включения PWR-TOP20x приведена на Рис. 6.55. Дополнительная
сигнальная обмотка, имеющая 35 витков, обеспечивает питание схеме управления и, кроме того,
служит источником сигнала обратной связи по напряжению.
Для увеличения коэффициента усиления в контуре обратной связи число витков этой обмотки
выбрано большим, чем это необходимо для обеспечения достаточного тока через управляющий
вывод С, — примерно 3...5 мА. Большая часть напряжения этой обмотки падает на стабилитроне.
Конденсаторы в цепи обратной связи сглаживают пульсации и обеспечивают необходимую
частотную коррекцию. В этой схеме для ограничения выбросов перенапряжения на первичной
обмотке дросселя при запирании ключа используется стабилитрон с напряжением стабилизации
100 В. Более подробно о работе этих микросхем можно прочитать в [6.12].
Семейство TOPSwitch-II (ТОР22х) второго поколения отличается лучшим соотношением цена/
качество и имеет ряд улучшений по сравнению с семейством первого поколения. В частности,
максимальная мощность увеличена до 150 Вт. Часть моделей семейства мощностью до 30 Вт
изготавливается в миниатюрных корпусах SMD-8, предназначенных для монтажа на поверхность.
Еще более мощные однокристальные сетевые источники, предназначенные для работы в
квазирезонансном режиме, производит фирма Sanken. В частности, модель STR-F6656 развивает
мощность до 300 Вт.
В настоящее время однокристальные сетевые источники выпускаются многими фирмами.
Очень интересную микросхему МС33363А разработали инженеры фирмы ON Semiconductor
(подразделение фирмы Motorola). Эта ИМС включает полноценный усилитель ошибки с высоким
коэффициентом усиления, чувствительный к напряжению, а не к току, как у предыдущей схемы.
ИМС имеет защиту от перенапряжения на выходе и от перегрева. Встроенный ключевой МОПтранзистор допускает напряжение на стоке до 700 В и ток стока до 1.5 А. Микросхема
изготавливается в 16-выводных DIP и SOP корпусах.
В Табл. 6.4 приведены основные параметры некоторых моделей однокристальных сетевых
источников.
6.7.4. ИМС микромощных бестрансформаторных сетевых источников
Выше мы рассмотрели импульсные сетевые источники на основе импульсных
преобразователей с высокочастотными импульсными трансформаторами или двухобмоточными
дросселями. Основными их достоинствами являются: высокий КПД и электрическое разделение
первичной и вторичной цепей. Однако наличие в их составе моточных изделий (трансформаторов
и дросселей) существенно увеличивает их цену, массу и габариты. При питании от сети микромощных потребителей, мощность рассеяния которых составляет единицы ватт или даже доли
ватта, потери энергии в источнике часто не являются определяющей характеристикой при выборе
его типа.
Промышленностью выпускаются несколько разновидностей ИМС источников постоянного
тока, питаемых от сети переменного тока, не нуждающихся в применении трансформаторов и
других моточных изделий. Основное их достоинство — простота включения при низкой цене.
Основные недостатки — низкий КПД и гальваническая связь с сетью. Последнее обстоятельство
делает опасным применение подобных устройств с точки зрения поражения человека электрическим током!! Низковольтный вывод схемы может оказаться напрямую соединенным с
фазным проводом сети. Тем не менее в тех случаях, когда соединение с корпусом этого вывода
или касание им человека при правильной эксплуатации абсолютно исключено, применение таких
источников может оказаться целесообразным.
Микросхема HV-2405E фирмы Harris Semiconductor (отечественный аналог — 1182ЕМ1) — это
однокристальный источник питания, который может выдавать напряжение 5...24 В при выходном
токе до 50 мА, работая от сети переменного тока напряжением 120...240 В. Для получения
компактного, легкого, дешевого и эффективного источника питания необходимы только
несколько внешних компонентов. Микросхема заменяет собой трансформатор, выпрямитель и
стабилизатор напряжения. Типовая схема включения ИМС приведена на Рис. 6.60.
о •------•
•---•
•
оРис. 6.60. Схема включения ИМС HV-2405E
Однокристальный источник преобразует напряжение сети переменного тока в
стабилизированное постоянное. Устройство состоит из выпрямительного диода, предварительного
импульсного стабилизатора и линейного стабилизатора с последовательным регулирующим
элементом, выполненных на одном кристалле.
Предварительный импульсный стабилизатор заряжает конденсатор
большой емкости Сз до тех пор, пока напряжение на нем не превысит
заданное выходное напряжение на 6 В. Тогда предварительный
стабилизатор переходит в режим блокирования и находится в этом
режиме, пока не начнется следующий период сетевого напряжения
(Рис. 6.61).
Конденсатор Сз питает энергией линейный последовательный стабилизатор, который
обеспечивает схему пользователя напряжением постоянного тока. Скорость разряда конденсатора
Сз зависит от тока нагрузки. Конденсатор подзаряжается в начале каждого периода сетевого
напряжения.
Более просто устроены микросхемы микромощных сетевых источников без гальванической
развязки типа МАХ610/12. Внутренняя структура этих ИМС представлена на Рис. 6.62а, а типовая
схема включения — на Рис. 6.626.
Микросхемы содержат мостовую схему выпрямления, ограничительный стабилитрон и
линейный стабилизатор напряжения. Допустимое значение входного переменного тока составляет
в непрерывном режиме 180 мА, а в импульсном — до 5 А. Для ограничения входного тока между
сетью и входом микросхемы включается конденсатор и резисторы, один из которых (R{) ) предназначен для ограничения тока заряда конденсаторов С\ и С2, а другой — для разряда
конденсатора С\ при выключении питания. Выходное напряжение 5 В может быть установлено
простым подключением вывода KSET к общей точке схемы. Другие значения выходного
напряжения в пределах 1.3...9 В можно задать, подключая внешний резистивный делитель R2Ri
между выходом и KSET, как это показано на Рис. 6.626.
Для микросхемы МАХ612 диапазон выходных напряжений составляет 3...15В.
Чтобы ограничить выходной ток, между выводом VQUJ И нагрузкой следует включить резистор
RSENS
6.8. Импульсные источники на коммутируемых конденсаторах
Дроссель импульсного стабилизатора напряжения является источником перенапряжений и
электромагнитных помех, поэтому во многих случаях желательно обойтись без него. Тогда
следует использовать источники на коммутируемых конденсаторах. Базовые схемы таких
источников приведены на Рис. 6.63.
Эти схемы реализованы, в частности, в ИМСICL7660 американской фирмы Intersil
(отечественный аналог — 1168ЕП1).
Микросхема включает четыре двунаправленных ключа Sx—S4 на МОП-транзисторах, генератор
тактовых импульсов и схему управления ключами. К микросхеме также подключены два
конденсатора. Конденсатор Q переносит заряд от входной цепи к выходной, а С2 поддерживает
напряжение на нагрузке во время заряда Q. Электрическую цепь из четырех ключей S1\—S4 и
конденсатора Q (в такой конфигурации, как на Рис. 6.63) можно назвать секцией переноса заряда.
Рассмотрим работу инвертора (Рис. 6.63а). Цикл состоит из двух тактов. В первом такте
замкнуты ключи S1 и S3. Конденсатор С\ подключен к входу и заряжается от первичного
источника до напряжения KIN. Во втором такте замкнуты ключи S2 и S4. Конденсатор С1
отключается от входа и подключается в перевернутом состоянии к выходу устройства. Так он
передает свой заряд на С2 (и в нагрузку), обеспечивая на выходе напряжение, равное примерно —
KIN.
При работе в режиме удвоителя напряжения (Рис. 6.636) в первом такте конденсатор также
заряжается до напряжения KIN, но теперь уже через ключи S2 и S4. Во втором такте конденсатор Q
через ключи S1 и S3 включается последовательно и согласно с KIN. При этом напряжение на
конденсаторе С2 устанавливается «2 UIN.
Такой способ преобразования напряжений прост и эффективен. Для его реализации достаточно
трех компонентов: ИМС и двух конденсаторов. Однако выходное напряжение схемы не
стабилизировано и определяется величиной входного напряжения. Другой недостаток таких
преобразователей — «мягкие» внешние характеристики: эквивалентное выходное сопротивление
преобразователя ICL7660 составляет величину порядка 150 Ом. Тем не менее, простейшие
преобразователи на коммутируемых конденсаторах при определенных обстоятельствах очень
удобны, например, для того, чтобы обеспечить биполярное питание ОУ. Фирма Maxim выпускает
несколько микросхем (МАХ200 — МАХ211 и др.) интерфейсных приемопередатчиков RC-232 с
питанием от одного источника напряжением 5 В, которые содержат удвоитель и инвертор на
коммутируемых конденсаторах, вырабатывающие питание ±10 В для схем передатчиков.
Существуют еще много интересных микросхем ИМС с коммутируемыми конденсаторами.
Например, модернизация ICL7660 — микросхема МАХ660, имеющая выходное сопротивление
всего 6.5 Ом и работающая на частоте до 80 кГц. Ее выходной ток — до 100 мА. Микросхема
МАХ864 — это сдвоенный источник, который вырабатывает ±10 В (до 20 мА) от +5 В при частоте
коммутации около 200 кГц. На кристалле размещены ключи для двух переносчиков заряда, один
из которых удваивает входное напряжение, а другой — инвертирует положительное выходное
напряжение.
В носимой аппаратуре, получающей питание от батарей, бывает очень важно иметь
стабилизированное питание при высоком КПД, низком уровне электромагнитных помех в
условиях существенного изменения напряжения источника (например, никель-кадмиевых
аккумуляторов) при малых габаритах. Для этого почти идеально подходит ИМС МАХ619. Она
содержит удвоитель и утроитель напряжения на коммутируемых конденсаторах. Система
управления контролирует выходное напряжение и производит подключение и отключение секции
утроения. Поскольку частота коммутации составляет 500 кГц, пульсации выходного напряжения
не превышают 100 мВ при емкости выходного конденсатора 10 мкФ. Коэффициент стабилизации
KLWE = 75, выходное сопротивление i?oUT= 2 Ом. Диапазон входного напряжения 2...3.6 В (два
аккумулятора или гальванических элемента во всем диапазоне разряда). Выходное напряжение
составляет 5 В при токе нагрузки до 50 мА. КПД при 3 В входного напряжения достигает 80%.
Преобразователь включает 4 внешних конденсатора и занимает с ними на плате площадь всего 0.6
см2.
Сравнительно недавно фирма Texas Instruments начала выпускать семейство
стабилизированных преобразователей на коммутируемых конденсаторах TPS601xx, имеющих
пониженный уровень пульсаций выходного напряжения. Каждый из этих преобразователей имеет
две секции переноса заряда (Рис. 6,64).
ЛЕКЦИЯ №9
Регистры
Регистром (английское Register) называется устройство, предназначенное для ввода (записи),
хранения и выдачи (считывания) цифрового кода, выраженного в виде двоичного числа (слова).
На схемах регистры обозначаются буквами RG. В отечественных сериях микросхем регистрам
соответствуют буквы ИР. Все регистры делятся на две большие группы (рис. 4.18):
- параллельные регистры;
- регистры сдвига (или сдвиговые регистры).
В параллельных регистрах каждый из триггеров имеет свой независимый информационный
вход (D) и свой независимый информационный выход. Тактовые входы (С) всех триггеров
соединены между собой. В результате параллельный регистр представляет собой многоразрядный,
многовходовый триггер.
В сдвиговых регистрах все триггеры соединены в последовательную цепочку (выход каждого
предыдущего триггера соединен со входом D следующего триггера). Тактовые входы всех
триггеров (С) объединены между собой. В результате такой триггер может рассматриваться как
линия задержки, входной сигнал которой последовательно перезаписывается из триггера в триггер
по фронту тактового сигнала С. Информационные входы и выходы триггеров могут быть
выведены наружу, а могут и не выводиться в зависимости от функции, выполняемой регистром.
Параллельные регистры в свою очередь делятся на две группы:
• регистры, срабатывающие по фронту управляющего сигнала С (или тактируемые регистры);
• регистры, срабатывающие по уровню управляющего сигнала С (или стробируемые
регистры).
Чаще всего в цифровых схемах используются регистры, управляемые фронтом (то есть
тактируемые), однако и стробируемые регистры имеют свой круг задач, в которых их ничто не
может заменить.
9.1. Параллельные и последовательные регистры.
Основными элементами регистра являются двоичные ячейки памяти, роль которых играют
триггеры различных типов.
Количество двоичных ячеек (триггеров) определяется количеством разрядов двоичного числа,
предназначенного для ввода в регистр. Если разряды двоичного числа записываются в ячейки
регистра одновременно, то его называют параллельным или регистром памяти. На рис. 9.1, а, 6
приведена функциональная схема простейшего двухразрядного параллельного регистра.
В исходном состоянии на шине «Ввод» имеем сигнал «О». Тогда на входах RS-триггеров
устанавливается «1» независимо от комбинации сигналов (нулей или единиц) на входах x1 и х2
логических элементов И-НЕ, характеризующих информацию, предназначенную для записи.
Пусть на входе х2 имеем логический нуль, а на входе x1—логическую единицу. Тогда прилогическую единицу. Тогда при
поступлении «1» на шину «Ввод» переключается элемент Э 1 и на S входе RS-триггера Т1
устанавливается «О». Триггер переключается в состояние Ql =1. На входе RS-триггера Т2 остается
«1» и соответственно на выходе Т2 Q2 = 0.
Рис.9.1. Параллельный регистр
Таким образом, в триггерах записывается и дополнительная двоичная информация,
поступающая на входы регистра. На выходах регистра, работающего в режиме хранения, имеются
логические нули. При подаче «1» на шину «Вывод» переключится элемент Э 3 и на выходе у1
появится «1», а на выходе у2 останется «О». Следовательно, происходит считывание записанной
информации.
1
9.2. Параллельный регистр на D-триггерахтриггерах
В параллельных регистрах информация записывается параллельно на все входы.
D0
D
T
Q0
C
D1
D
T
Q1
C
DN
D
T
QN
C
Рис. 9.2 – Принципиальная схема параллельного регистра
Каждый из триггеров записывает информацию, подаваемую на вход D, и сохраняет ее до
прихода следующего синхроимпульса. Ниже показаны временные диаграммы параллельного
регистра.
си
D0
D1
D2
Q0
Q1
Q2
t
t
t
t
t
t
t
Рис 9.3 – Временные диаграммы параллельного регистра
В стандартные серии входит несколько типов параллельных регистров, срабатывающих по
фронту (рис. 9.4). Различаются они количеством разрядов, наличием или отсутствием инверсных
выходов, наличием или отсутствием входа сброса (-R) или разрешения записи (-WE), а также
типом выходных каскадов (2С или ЗС) и соответственно наличием или отсутствием входа
разрешения -EZ. Иногда на схемах тактовый вход С обозначается WR —логическую единицу. Тогда при сигнал записи в регистр.
Рис. 9.4. Параллельные регистры стандартных серий, срабатывающие по фронту.
Большинство регистров имеют восемь разрядов, то есть запоминают один байт информации.
Регистр ТМ8 в справочниках обычно называется счетверенным D-триггером (он и в наименовании
несет буквы ТМ), хотя он вполне может рассматриваться и как регистр, так как тактовый вход С и
вход сброса -R у всех четырех триггеров объединены между собой.
2
Таблицы истинности регистров очень просты и не отличаются принципиально от таблицы
истинности D-триггеров. Отличие от триггеров появляется только в случае наличия у регистра
дополнительных управляющих входов разрешения записи -WE и разрешения выхода -EZ. В
качестве примеров ниже приведены таблицы истинности регистра ИР27 и регистра ИР37 (табл.
9.1. и 9.2 соответственно). По переходу тактового сигнала С из 0 в 1 (положительный фронт) оба
регистра записывают в себя входную информацию.
Таблица 9.1. Таблица истинности регистра ИР27
Таблица 9.2. Таблица истинности регистра ИР37
Все регистры, имеющие выход с тремя состояниями, обеспечивают повышенную нагрузочную
способность. Задержка переключения регистров примерно соответствует задержке переключения
триггеров. Все временные ограничения, накладываемые на входные сигналы в случае триггеров,
справедливы и для входных сигналов регистров. Например, не должна быть слишком малой
длительность сигнала С, а также не должна быть слишком малой задержка между установлением
сигнала D и приходом положительного фронта сигнала С. Иначе работа регистра может быть
нестабильной или даже неправильной.
Параллельные регистры, срабатывающие по уровню стробирующего сигнала (или, как их еще
называют, регистры-защелки, английское Latch), можно рассматривать как некий гибрид между
буфером и регистром. Когда сигнал на стробирующем входе единичный, такой регистр
пропускает через себя входные информационные сигналы, а когда стробирующий сигнал
становится равен нулю, регистр переходит в режим хранения последнего из пропущенных
значений входных сигналов.
Применение таких регистров сильно ограничено, хотя иногда они довольно удобны. В
некоторых схемах они могут успешно заменять регистры, срабатывающие по фронту, а в других
схемах их применение вместо регистров, срабатывающих по фронту, недопустимо.
В стандартных сериях микросхем регистры, срабатывающие по уровню, представлены гораздо
меньше, чем регистры, срабатывающие по фронту. На рис. 9.5 в качестве примеров показаны две
микросхемы этого типа: 4-разрядного регистра ТМ7 и 8-разрядного регистра ИР22.
Стробирующие входы С нередко на схемах обозначают Е (от английского Enable —логическую единицу. Тогда при разрешение)
для того, чтобы не путать их с тактовыми входами D-тригтеров.
3
Рис. 9.5. Регистры, срабатывающие по уровню.
Микросхему ТМ7 (и близкую к ней ТМ5) часто называют набором триггеров, но ее можно
рассматривать и как регистр. Микросхема состоит из четырех триггеров, стробирующие входы
которых С соединены попарно, то есть можно говорить о двух двухразрядных регистрахзащелках. Входы С1 и С2 микросхемы управляют каждый двумя разрядами данных. Все триггеры
имеют как прямые, так и инверсные выходы, что иногда очень удобно. Таблица истинности
микросхемы ТМ7 приведена ниже (табл. 9.3).
Таблица 9.3. Таблица истинности регистра ТМ7
При единице на входе С выходные сигналы повторяют входные, то есть регистр работает как
обычный буфер с прямыми и инверсными выходами. При нуле на входе С на выходе регистра
постоянно хранится та входная информация, которая была в момент прихода отрицательного
фронта сигнала С. Однако говорить, что регистр ТМ7 срабатывает по отрицательному фронту
сигнала С, неверно, так как информация на выходе меняется не только по этому фронту, но и в
момент изменения входных сигналов при С = 1.
Регистр ИР22 отличается от ТМ7 тем, что имеет выходы с тремя состояниями (и
соответственно вход разрешения всех выходов -EZ) и тем, что всеми восемью разрядами
управляет один стробирующий сигнал С. Суть работы от этого не изменяется. При единице на
входе С регистр работает как буфер-повторитель, а при нуле на входе С —логическую единицу. Тогда при хранит ту
информацию, которая была на входе в момент отрицательного фронта сигнала С. Выходы у
регистра ИР22 только прямые. Как и все регистры с тремя состояниями выхода, регистр ИР22
имеет повышенную нагрузочную способность. Таблица истинности регистра ИР22 приведена
ниже (табл. 9.4).
Таблица 9.4. Таблица истинности регистра ИР22
Величины задержек триггеров, срабатывающих по уровню, в 1,5—логическую единицу. Тогда при2 раза превышают задержки
D-триггеров. Для правильной работы микросхем положительный импульс на входе С не должен
быть слишком коротким, а задержка между изменением информации на входе D и отрицательным
фронтом сигнала С не должна быть слишком малой. Информация на входе D не должна слишком
быстро сниматься после отрицательного фронта сигнала С.
9.3 Последовательный регистр
Более экономичным является последовательный регистр (регистр сдвига, английское Shift
Register), в котором разряды двоичного числа записываются и считываются последовательно во
времени—логическую единицу. Тогда приразряд за разрядом.
4
На рис. 9.6 приведена схема трехразрядного последовательного регистра на D-триггерах. В
крайнем слева триггере хранится информация, соответствующая старшему разряду числа, а в
крайнем справа—логическую единицу. Тогда примладшему. В отличие от параллельного регистра для ввода многоразрядной
информации в последовательный регистр используется только один вход D. На рисунке 9.6
введены следующие обозначения: DI – data input – вход данных, DO – data output – выход данных.
Поступление разрядов двоичного числа в регистр чередуется с подачей тактовых
импульсов(синхроимпульсов или импульсов синхронизации) на тактовый вход С. Временные
диаграммы, иллюстрирующие работу последовательного регистра, приведены на рис. 9.7.
Пусть в исходном состоянии на входе DI действует логическая единица, соответствующая
младшему разряду числа. С поступлением тактового импульса его фронтом переключается
триггер T1 (Q0 = 1), а состояния триггеров Т2 и Т3 остаются без изменения {Q1=0, DO=0). Таким
образом происходит запись информации в память триггера T1. После окончания действия
логической единицы на входе состояния триггеров регистра остаются без изменения (информация
хранится в первом триггере T1) до прихода следующего тактового импульса. С приходом второго
тактового импульса его фронтом переключаются триггеры Т1 и T2(Q0 = 0. Q1 = l), а состояние
триггера Т3 не изменяется (DO = 0). Информация, записанная в триггере Т1, сдвигается вправо и
записывается в триггере Т2, а Т1 оказывается подготовленным к приходу следующего разряда
двоичного числа. С приходом третьего тактового импульса переключаются триггеры Т2 и T3(Q2 =
0, Q3 = 1) и информация младшего разряда считывается на выходе триггера Т3.
Во многих случаях при построении арифметических устройств необходимо осуществить сдвиг
информации влево. Последовательные регистры, обладающие способностью осуществлять сдвиг
информации в обоих направлениях, называются реверсивными.
DI
D
C
T
Q0
D
T
Q1
D
C
T DO
C
си
Рис. 9.6 – Принципиальная схема последовательного регистра
си
t
DI
t
Q0
t
Q1
t
DO
t
Рис. 9.7 – Временные диаграммы последовательного регистра
Реверсивный сдвиговый регистр позволяет сдвигать информацию вправо или влево, в
зависимости от значения управляющих сигналов на дополнительном входе.
5
DI
S1.1
D
T
Q0
S1.2
C
D
T
Q1
S1.3
C
D
T
Q2
C
си
DO
Рис. 9.8 – Схема реверсивного сдвигового регистра
Если V 0 , то S1 – в верхнем положении.
Если V 1 , то S1 – в нижнем положении.
1
1
2
3
1
2
V
3
&
1
&
V
Рис. 9.9 – Схема ключа и его реализация на логических элементах
DI
Q0
&
D
T
&
1
&
D
T
Q1
&
1
C
&
D
T
Q2
1
&
C
DO
&
1
C
&
си
V
1
Рис. 9.10 – Принципиальная схема реверсивного сдвигового регистра
С названиями направлений сдвига в сдвиговых регистрах часто возникает путаница. Сдвиг
бывает двух видов: вправо (основной режим, который есть у всех сдвиговых регистров) и влево
(этот режим есть только у некоторых, реверсивных сдвиговых регистров). Названия эти отражают
внутреннюю структуру регистров сдвига (рис. 9.6) и перезапись сигналов последовательно по
цепочке триггеров. При этом триггеры, вполне естественно, нумеруются слева направо, например,
от 0 до 7 (или от 1 до 8) для 8-разрядных регистров. В результате сдвиг информации регистром
вправо представляет собой сдвиг в сторону разрядов, имеющих большие номера, а сдвиг
информации регистром влево —логическую единицу. Тогда при это сдвиг в сторону разрядов, имеющих меньшие номера.
Однако, как известно, в любом двоичном числе слева расположены старшие разряды, а справа
—логическую единицу. Тогда при старшие разряды. Поэтому сдвиг двоичного числа вправо будет сдвигом в сторону младших
разрядов, а сдвиг влево —логическую единицу. Тогда при сдвигом в сторону старших разрядов. Это противоречие не чей-то злой
умысел, просто так сложилось исторически, и об этом надо помнить разработчику цифровой
аппаратуры.
В стандартные серии цифровых микросхем входит несколько типов сдвиговых регистров,
отличающихся возможными режимами работы, режимами записи, чтения и сдвига, а также типом
выходных каскадов (2С или ЗС). Большинство регистров сдвига имеет восемь разрядов. На рис.
9.11 представлены для примера четыре типа микросхем регистров сдвига.
6
Рис. 9.11. Сдвиговые регистры.
Регистр ИР8 —логическую единицу. Тогда при наиболее простой из регистров сдвига. Он представляет собой 8-разрядную
линию задержки, то есть имеет только один информационный вход, на который подается
последовательная сдвигаемая информация (точнее, два входа, объединенных по функции 2И), и
восемь параллельных выходов. Сдвиг в сторону выходов со старшими номерами осуществляется
по переднему фронту тактового сигнала С. Имеется также вход сброса -R, по нулевому сигналу на
котором все выходы регистра сбрасываются в нуль. Таблица истинности регистра ИР8 приведена
ниже (табл. 9.5).
Таблица 9.5. Таблица истинности регистра сдвига ИР8
Регистр ИР9 выполняет функцию, обратную регистру ИР8. Если ИР8 преобразует входную
последовательную информацию в выходную параллельную, то регистр ИР9 преобразует входную
параллельную информацию в выходную последовательную. Однако суть сдвига не меняется,
просто в регистре ИР9 все внутренние триггеры имеют выведенные параллельные входы, и только
один, последний триггер имеет выход (причем как прямой, так и инверсный). Запись входного
кода в регистр производится по нулевому сигналу на входе -WR. Сдвиг осуществляется по
положительному фронту на одном из двух тактовых входов С1 и С2, объединенных по функции
2ИЛИ. Имеется также вход расширения DR, сигнал с которого в режиме сдвига перезаписывается
в младший разряд сдвигового регистра. Таблица истинности регистра ИР9 приведена ниже (табл.
9.6).
Таблица 9.6. Таблица истинности регистра сдвига ИР9
Как и все остальные сдвиговые регистры, регистры ИР8 и ИР9 допускают каскадирование, то есть
совместное включение для увеличения разрядности. На рис. 9.12 показано совместное включение
трех регистров ИР9. В результате объединения получается 24-разрядный сдвиговый регистр. При
этом увеличение разрядности не приводит к увеличению задержки сдвига, так как тактовые входы
всех используемых регистров объединяются параллельно. Входной 24-разрядный параллельный
код преобразуется в выходной последовательный код.
7
Рис. 9.12. Соединение регистров ИР9 для увеличения разрядности.
9.4 Универсальный последовательно–параллельный регистр
Универсальный последовательно–параллельный регистр должен позволять:
1)
Принимать информацию в последовательном или параллельном коде (в
зависимости от сигнала управления).
2)
Формировать на выходах параллельный код.
3)
Формировать на выходе последовательность данных в виде последовательного
кода, сдвиг которого возможен как в одном, так и в другом направлении (в зависимости от второго
сигнала управления).
Для того чтобы построить универсальный регистр целесообразно использовать RS и D
триггеры. Входы R и S используют для записи параллельного кода. Вход D – для построения
сдвигового регистра.
D0
&
S
T
Q0
D
C
1
&
R
си
L
Рис.9.13 – Принципиальная схема универсального регистра
C
D0
D1
D2
Q0
D3
Q1
V
Q2
L
Q3
DI
DO
Рис. 9.14 – Условное обозначение универсального регистра
На рисунке 9.14 приняты следующие обозначения: C – вход синхронизации, D0, D1, D2 и D3 –
входы параллельного кода, V – направление сдвига, L – разрешение записи параллельного кода,
DI – вход последовательного кода, DO – выход последовательного кода; Q0, Q1, Q2 и Q3 –
выходы параллельного кода.
Регистр ИР 13 соединяет в себе возможности регистров ИР8 и ИР9. Он имеет как восемь
входов для параллельной записи, так и соответствующие им восемь выходов параллельной
информации Сдвиг осуществляется по положительному фронту тактового сигнала С, причем
сдвиг возможен как в сторону старших разрядов (вправо), так и в сторону младших разрядов
(влево). Для наращивания разрядности у регистра ИР 13 имеются последовательные
информационные входы DR и DL, сигналы с которых вводятся соответственно в младший и в
старший разряды. Предусмотрен сброс всех выходов регистра в нуль по нулевому сигналу на
входе -R.
8
Режим работы регистра ИР 13 определяется двумя управляющими входами SR и SL. При
единице на входе SR и нуле на входе SL по фронту сигнала С происходит сдвиг в сторону
старших разрядов. При нуле на входе SR и единице на входе SL по фронту сигнала С происходит
сдвиг в сторону младших разрядов. При обоих единичных сигналах на входах SR и SL по фронту
сигнала С происходит параллельная загрузка информации в регистр. Все это видно из таблицы
истинности регистра ИР13(табл.9.7).
Отметим, что регистр ИР 13 применяется заметно реже, чем более простые регистры ИР8 и
ЙР9, так как задач, в которых были бы нужны все возможности регистра ИР 13 не так уж много, а
управление работой регистра ИР 13 довольно сложное.
Таблица 9.7. Таблица истинности регистра ИР 13
Наконец, последний сдвиговый регистр, который мы рассмотрим подробнее, это регистр ИР24.
По своим возможностям он близок к ИР 13, однако его главной особенностью является
двунаправленная параллельная шина данных. То есть одни и те же выводы микросхемы
используются как для параллельной записи информации в регистр, так и для параллельного
чтения информации из регистра. При этом двунаправленные выводы данных имеют повышенную
нагрузочную способность. Это позволяет легко сопрягать регистр ИР24 с многоразрядными
микросхемами памяти и с двунаправленными буферами. Поэтому применяется данный регистр
чаще, чем ИР 13.
Регистр ИР24 обеспечивает сдвиг информации в обоих направлениях. Имеются входы
расширения DR и DL, а также выходы расширения Q0 и Q7, что позволяет легко наращивать
разрядность. Отличие выходов Q0 и Q7 от нулевого и седьмого разрядов данных состоит в том,
что Q0 и Q7 —логическую единицу. Тогда при однонаправленные, то есть в любом режиме работы выдают информацию с
выходов внутренних триггеров младшего и старшего разрядов. Тактируется регистр
положительным фронтом сигнала С. Предусмотрен сброс регистра нулевым сигналом на входе -R.
Режим работы микросхемы определяется сигналами на управляющих входах SR и SL.
При единичном сигнале на SR и нулевом сигнале на SL по положительному фронту сигнала С
происходит сдвиг информации вправо (в сторону разрядов с большими номерами). Запись в
разряд 0 производится при этом со входа расширения DR.
При единичном сигнале на SL и нулевом сигнале на SR по положительному фронту сигнала С
происходит сдвиг информации влево (в сторону разрядов с меньшими номерами). Запись в разряд
7 производится при этом со входа расширения DL.
При обоих нулях на входах SR и SL регистр переходит в режим хранения. Во всех этих случаях
разряды данных работают как вход или как выход в зависимости от сигналов -EZ.
При обеих единицах на входах SR и SL по положительному фронту С в регистр записывается
параллельный код, причем разряды данных переходят в состояние приема независимо от сигналов
-EZ. Таблица истинности регистра ИР24 приведена ниже (табл. 9.8).
Таблица 9.8. Таблица истинности регистра ИР24
9
Объединяя два регистра ИР24, легко получить 16-разрядный сдвиговый регистр с сохранением
всех возможностей одной микросхемы (рис. 9.15). Точно так же можно объединять и большее
количество микросхем.
Рис. 9.15. Объединение регистров ИР24 для увеличения разрядности.
9.5. Практическое применение регистров
9.5.1. Применение параллельных регистров
Одно из основных применений регистров состоит в хранении требуемого кода в течение
нужного времени. Если для работы остальной части схемы необходимо иметь входной код,
который можно легко изменять, то для этого как раз подходит регистр.
На рис. 9.16 показана типичная схема включения регистра для хранения кода и временная
диаграмма его работы. Код на входе регистра может изменяться произвольным образом, но в тот
момент, когда этот код принимает необходимое значение, на вход С триггера подается
синхросигнал (строб), который записывает код в регистр. Этот код будет храниться в регистре до
прихода следующего строба. Причем важно и то, что все разряды выходного кода регистра будут
переключаться одновременно даже в том случае, когда разряды входного кода переключаются не
одновременно. Главное, чтобы к приходу положительного фронта строба (сигнала С) все разряды
входного кода приняли нужное, устойчивое значение.
Рис. 9.16. Хранение кода в параллельном регистре.
Еще одно важнейшее применение регистров связано с запоминанием нескольких
последовательных значений изменяющегося входного кода. Это позволяет, например, сравнивать
предыдущее значение кода с последующим значением этого же кода или производить
арифметические операции над несколькими последовательными значениями одного и того же
кода. То есть регистр в данном случае выступает как элемент линии задержки, хранящей в себе
историю поведения входного кода.
Для примера на рис. 9.17 показана схема вычисления разности двух последовательных
значений входного кода. Такая задача возникает в частности при цифровой обработке аналоговых
сигналов. Последовательные значения входного 4-разрядного кода сопровождаются тактовым
10
сигналом, по положительному фронту которого производится запись в два последовательно
включенных регистра. Когда на выходе регистра RG1 присутствует N-e значение входного кода,
на выходе регистра RG2 будет (N-l)-e значение этого же кода.
Рис. 9.17. Схема вычисления разности значений кодов в двух последовательных тактах.
Подавая эти два кода с выходов регистров на 4-разрядный сумматор, включенный в режиме
вычитания, мы получаем на выходе сумматора код разности между N-м значением и (N-l)-M
значением. В данном случае очень удобен регистр ТМ8, имеющий инверсные выходы. Для
обеспечения строго одновременного изменения выходных сигналов сумматора можно включить
дополнительный выходной регистр RG3, тактируемый тем же самым общим тактовым сигналом.
Правда, код разности при этом будет задержан на один такт.
Регистры также широко используются для организации конвейерной обработки, позволяющей
существенно повысить тактовую частоту работы схемы. Ускорение при этом достигается за счет
распараллеливания работы нескольких последовательно включенных узлов схемы.
Пусть, например, последовательность входных кодов, следующих с периодом Т, поступает на
вход цепочки из двух узлов, производящих обработку или преобразование этих кодов (рис. 9.18).
Узлы эти могут представлять собой комбинационные микросхемы (например сумматоры) или
более сложные устройства, включающие в себя микросхемы счетчиков или микросхемы памяти.
Главное состоит в том, что выходные сигналы этих узлов выставляются не мгновенно, а в течение
какого-то конечного времени, величина которого определяется внутренним строением узла. Пусть
задержка установления выходного кода первого узла равняется t1, а задержка установления
выходного кода второго узла составляет t2. Очевидно, что период следования входных кодов Т не
должен быть меньше, чем сумма этих двух задержек:
Т > t1+t2
Иначе код на выходе цепочки может никогда не принять устойчивого значения, так как
переходный процесс предыдущего такта будет сменяться переходным процессом следующего
такта. То есть быстродействие узлов накладывает жесткое ограничение на тактовую частоту.
Рис. 9.18. Работа последовательной цепочки двух узлов.
Однако можно обойти это ограничение, если воспользоваться принципом конвейера, заставить
узлы работать не последовательно, а параллельно. Это достигается включением между узлами
регистра, тактируемого входным тактовым сигналом. Еще один регистр целесообразно включить
на входе второго узла, что обеспечит длительность устойчивого кода на выходе всего устройства,
равную длительности периода тактового сигнала Т (рис. 9.19). В результате ограничение на
период тактового сигнала становится более мягким: Т не должно быть меньше максимальной из
двух величин t1 и t2 с добавлением времени задержки регистра:
11
Т > max {t1,t2} + tRG.
То есть к следующему фронту тактового сигнала должен закончить свою работу самый
медленный из узлов, и тогда его выходной код будет записан в регистр правильно.
Рис. 9.19. Конвейерная обработка с помощью регистров.
Точно так же можно построить конвейер на любое количество последовательно включенных
узлов. Конечно, в результате введения конвейера происходит задержка выполнения полной
функции устройства на число тактов, равное числу введенных регистров. Однако в том случае,
когда необходимо обрабатывать большие последовательности входных кодов, эта задержка
наблюдается только один раз —логическую единицу. Тогда при в самом начале последовательности, а затем уже она не имеет
значения.
Регистры могут также применяться в составе вычислителей, выполняя функцию накопителя
результата вычислений. В данном случае мы уже имеем дело с более сложной обработкой
информации, чем в случае чисто комбинационных схем. С каждым тактом в регистре обновляется
содержимое, являющееся результатом математической обработки входного кода и результата
предыдущего вычисления.
9.5.2. Применение регистров сдвига.
Преобразование параллельного кода в последовательный
DI
Вх.
данных
RG Q0
Q1
Q2
Q3
Вых.
последов.
кода
L
C
СИ
1
D1
D2
D3
D4
v
Рисунок 9.20 – Преобразование параллельного кода в последовательный
D1 – вход последовательных данных,
D0…D3 – вход параллельного кода,
L – загрузка параллельного кода,
C – синхроимпульс для сдвига информации в регистре,
V – схема деления частоты и синхроимпульса,
1 – синхроимпульс параллельный данным от источника данных.
Преобразователь
мультиплексора
параллельного
кода
в
12
последовательный
с
использованием
D1
D2
D3
D4
A0
A1
Парал.
данные
C
Q0
Ст2 Q1
MS
D3D2D1D0
Рисунок 9.21 – Преобразователь параллельного кода в последовательный с использованием
мультиплексора
На вход мультиплексора данные необходимо подавать на протяжении четырех периодов
следующих синхроимпульсов, за это время на выходе мультиплексора по очереди появятся
последовательности данных. После завершения считывания можно подать другую информацию.
Параллельный код преобразуют в последовательный, чтобы уменьшить количество линий ghb
передаче информации от одного устройства к другому.
Преобразование последовательного кода в параллельный
Вход
послед. кода
СИ
DI
C
RG
Q0
Q1
Q2
Q3
D1
D2
D3
D4
C
RG
Q0
Q1
Q2
Q3
СИ1
f
f4
Схема
задержки
Рисунок 9.22 – Преобразование последовательного кода в параллельный
СИ1 формируется через каждые четыре импульса СИ. За четыре такта вся информационная
последовательность кода вводится в регистр, как только она будет введена (сразу после окончания
четвертого синхроимпульса) можно осуществить запись во второй регистр на выходе которого и
будет сформирован параллельный код. Длина регистра определяется длиной кода.
Передача данных в последовательном коде
В качестве примера на рис. 9.23 показана простейшая схема передачи цифровой информации в
последовательном коде по двум линиям: информационной и синхронизующей. Такая передача
позволяет сократить количество соединительных проводов, а также упростить защиту
передаваемых данных от действия внешних электромагнитных помех, правда, ценой снижения
скорости передачи.
Рис. 9.23. Последовательная передача информации с помощью регистров сдвига.
На передающем конце (слева на рисунке) с помощью сдвигового регистра ИР9 входной
параллельный 8-разрядный код преобразуется в последовательность разрядов данных, следующих
с частотой тактового сигнала. На приемном конце (справа на рисунке) с помощью сдвигового
регистра ИР8 эта последовательность разрядов данных снова преобразуется в параллельный код.
Оба регистра тактируются одним и тем же тактовым сигналом, который передается по линии
связи параллельно с последовательностью данных. Для увеличения надежности передачи
13
информационный сигнал дополнительно задерживается относительно фронта тактового сигнала с
помощью цепочки из двух инверторов.
Первый бит последовательного входа (со входа 7 регистра ИР9) начинает передаваться с
началом сигнала записи -Зап. Следующие разряды передаются с каждым следующим положительным фронтом тактового сигнала С. Последним передается сигнал со входа 0. В регистр ИР8
разряды последовательного кода записываются в том же самом порядке, в каком они были в
регистре ИР9. По окончании передачи первый переданный сигнал данных, окажется в разряде 7
шины данных регистра ИР 8, а последний переданный сигнал данных —логическую единицу. Тогда при в разряде 0.
Линии задержки на основе регистров сдвига
Следующее применение сдвиговых регистров состоит в организации всевозможных линий
задержек, особенно имеющих значительное количество каскадов. С помощью сдвиговых
регистров можно обеспечить задержку любого входного сигнала на целое число тактов. Правда,
надо учитывать, что длительность входного сигнала (и любого его элемента) будет также
передаваться по линии задержки с точностью до одного такта. Такие линии задержки могут
применяться для сравнения нескольких последующих тактов входного сигнала, для выполнения
арифметических операций с несколькими тактами входного сигнала, для других подобных целей.
Работа линии задержки на регистре сдвига иллюстрируется рис. 9.24.
Рис. 9.24. Линия задержки входного сигнала на регистре сдвига.
Генератор импульсов программируемой длительности
Сдвиговые регистры могут также применяться для формирования импульсов заданной
длительности, причем длительность импульса может задаваться управляющим кодом, то есть быть
программно управляемой. На рис. 9.25 приведена возможная схема такого формирователя.
Рис. 9.25. Формирователь импульсов с длительностью, задаваемой управляющим кодом.
В исходном состоянии (до прихода положительного фронта входного сигнала) триггер
сброшен в нуль, на всех выходах регистра сдвига нули, на инверсном выходе мультиплексора единица. На мультиплексор подан управляющий код, определяющий длительность выходного
сигнала. При поступлении положительного фронта входного сигнала триггер перебрасывается в
единицу (начало действия выходного импульса), и этот единичный сигнал начинает
последовательно сдвигаться регистром сдвига по каждому фронту тактового сигнала.
Пусть управляющий код равен 5. Тогда в тот момент, когда на выходе 5 сдвигового регистра
появится единица, она будет передана на выход мультиплексора КП7 с инверсией. При этом
нулевой сигнал на входе -R триггера сбросит триггер в нуль, что соответствует окончанию
действия выходного импульса.
Таким образом, длительность выходного сигнала будет определяться управляющим кодом.
Погрешность установки этой длительности равна одному периоду тактового сигнала и зависит от
временного сдвига между фронтом входного сигнала и фронтом ближайшего к нему тактового
14
импульса. Чем больше длительность выходного сигнала, тем меньше относительная погрешность
установки его точности. Например, при управляющем коде 0 длительность выходного сигнала
может быть от О до Т, где Т —логическую единицу. Тогда при период тактового сигнала. А при управляющем коде 7
длительность выходного сигнала будет от 7Т до 8Т. При этом мы не учитываем задержек триггера,
сдвигового регистра и мультиплексора.
Сдвиговые регистры могут также использоваться для умножения и деления двоичных чисел на
n
2 , где n —логическую единицу. Тогда при целое число, большее нуля. Сдвиг двоичного числа вправо (в сторону младших
разрядов) на один разряд равносилен делению на 2. Сдвиг двоичного числа влево (в сторону
старших разрядов) на один разряд равносилен умножению на 2. Для того чтобы сдвиговый
регистр умножал и делил двоичный код, надо всего лишь записать этот код в регистр и сдвинуть
его нужное количество раз вправо или влево. Наиболее удобен для этого регистр ИР13. При этом
необходимо, чтобы в освободившиеся разряды вводились нули, то есть на входы расширения DR
и DL регистра нужно подать нулевые сигналы.
Генераторы случайных последовательностей
Наконец, последнее применение сдвигового регистра, которое мы рассмотрим, —логическую единицу. Тогда при это
генератор случайной последовательности сигналов или случайной последовательности кодов.
Строго говоря, последовательности будут не полностью случайные, а квазислучайные, то есть
будут периодически повторяться, но период этот довольно большой. Случайные
последовательности сигналов и кодов широко применяются в тестирующей аппаратуре, в
генераторах шума, в логических игровых устройствах.
Задача состоит в том, чтобы выходной сигнал или код менял свое состояние случайно (или
почти случайно). Сигнал должен случайно переключаться из 0 в 1 и из 1 в 0, а код должен случайно принимать значения из диапазона от 0 до (2 N-1), где N —логическую единицу. Тогда при число разрядов кода (например, от
0 до 255 при 8-разрядном коде). Псевдослучайные последовательности имеют то преимущество
перед истинно случайными, что они предсказуемые и периодические, но в этом же и их
недостаток.
Структура генератора квазислучайной последовательности на сдвиговом регистре очень проста
(рис. 9.26). Она представляет собой регистр сдвига с параллельными выходами (например, ИР8),
несколько (минимум два) выходных сигналов которого, объединены с помощью элемента
Исключающее ИЛИ, с выхода которого сигнал подается на вход регистра, замыкая схему в
кольцо. Схема тактируется сигналом с частотой fT.
15
Рис. 9.26. Структура генератора псевдослучайной последовательности.
Выбор номеров разрядов для подключения обратной связи представляет собой непростую
задачу, но существуют справочные таблицы, в которых они приведены. В любом случае одна из
точек подключения —логическую единицу. Тогда при выход старшего разряда. В табл. 9.9 приведены точки подключения
обратной связи для регистров сдвига с разным количеством разрядов N (номера разрядов считаются от нуля).
Таблица 9.9. Точки подключения обратной связи
Из таблицы видно, что выгоднее брать число разрядов не кратное 8, например, 7, 15 или 31. В
этом случае для обратной связи используются всего лишь два выхода, то есть достаточно одного
двухвходового элемента Исключающее ИЛИ.
Период выходной последовательности генератора составляет (2N -1) тактов, где N —логическую единицу. Тогда при
количество разрядов регистра сдвига. За это время каждое из возможных значений выходного
кода (кроме одного) встречается один раз. Количество единиц в выходном сигнале больше
количества нулей на единицу.
Выходной код 000...0 представляет собой запрещенное состояние, так как он блокирует работу
генератора, воспроизводя сам себя снова и снова. Но в то же время получиться такой нулевой код
может только сам из себя, поэтому достаточно обеспечить, чтобы его не было при включении
питания схемы.
Частоты в спектре выходного сигнала будут следовать с интервалом fт /(2N-1), а огибающая
спектра будет практически постоянной до частоты 0,25fт, то есть шум до этой частоты можно
считать белым (спад в 3 дБ происходит на частоте 0,45 fт).
Рис. 9.27. 31-разрядный генератор псевдослучайной последовательности на регистрах сдвига.
На рис. 9.27 показана практическая схема генератора псевдослучайной последовательности на
31-разрядном сдвиговом регистре. Обратная связь осуществляется с выходов 30 и 17 регистра
через двухвходовой элемент Исключающее ИЛИ с инвертором. Из-за применения инвертора
запрещенным состоянием генератора является код 1111...1 (а не код 000...0), который в данном
случае исключается очень просто —логическую единицу. Тогда при начальным сбросом регистров в нуль при включении питания
по сигналу -Сброс. Генератор выдает квазислучайную последовательность 31-разрядных кодов со
всех выходов регистра, а также квазислучайную последовательность нулей и единиц на любом из
выходов регистра. Такой генератор использовала известная фирма Hewlett-Packard в своем
генераторе шума.
Лекция 10. Счетчики
16
10.1. Классификация счетчиков
Счетчиком импульсов называется устройство, осуществляющее счет числа его входных
импульсов, реализованных обычно в двоичном коде.
Счетчики представляют более высокий, чем регистры, уровень сложности цифровых
микросхем, имеющих внутреннюю память. Хотя в основе любого счетчика лежат те же самые
триггеры, которые образуют и регистры, но в счетчиках триггеры соединены более сложными
связями, в результате чего их функции сложнее, и на их основе можно строить более сложные
устройства, чем на регистрах. Точно так же, как и в случае регистров, внутренняя память
счетчиков —логическую единицу. Тогда при оперативная, то есть ее содержимое сохраняется только до тех пор, пока включено
питание схемы. С выключением питания память стирается, а при новом включении питания схемы
содержимое памяти будет произвольным, случайным, зависящим только от конкретной
микросхемы, то есть выходные сигналы счетчиков будут произвольными.
Счетчик характеризуется модулем счета Мсч, т. е. числом входных импульсов, при котором
счетчик возвращается в исходное состояние.
Счетчиком, осуществляющим счет с модулем, равным двум, может служить обычный Tтриггер.
Как следует из самого названия, счетчики предназначены для счета входных импульсов. То
есть с приходом каждого нового входного импульса двоичный код на выходе счетчика увеличивается (или уменьшается) на единицу (рис. 5.1). Срабатывать счетчик может по
отрицательному фронту входного (тактового) сигнала (как на рисунке) или по положительному
фронту входного сигнала. Режим счета обеспечивается использованием внутренних триггеров,
работающих в счетном режиме. Выходы счетчика представляют собой как раз выходы этих
триггеров. Каждый выход счетчика представляет собой разряд двоичного кода, причем разряд,
переключающийся чаще других (по каждому входному импульсу), будет младшим, а разряд,
переключающийся реже других —логическую единицу. Тогда при старшим.
Счетчик может работать на увеличение выходного кода по каждому входному импульсу, это
основной режим, имеющийся во всех счетчиках, он называется режимом прямого счета. Счетчик
может также работать на уменьшение выходного кода по каждому входному импульсу, это режим
обратного или инверсного счета, предусмотренный в счетчиках, называемых реверсивными.
Инверсный счет бывает довольно удобен в схемах, где необходимо отсчитывать заданное
количество входных импульсов.
Большинство счетчиков работают в обычном двоичном коде, то есть считают от 0 до (2 —логическую единицу. Тогда при 1),
где N —логическую единицу. Тогда при число разрядов выходного кода счетчика. Например, 4-разрядный счетчик в режиме
прямого счета будет считать от 0 (код 0000) до 15 (код 1111), а 8-разрядный —логическую единицу. Тогда при от 0 (код 0000
0000) до 255 (код 1111 1111). После максимального значения кода счетчик по следующему
входному импульсу переключается опять в 0, то есть работает по кругу. Если же счет инверсный,
то счетчик считает до нуля, а дальше переходит к максимальному коду 111... 1.
Имеются также двоично-десятичные счетчики, предельный код на выходе которых не
превышает максимального двоично-десятичного числа, возможного при данном количестве разрядов. Например, 4-разрядный двоично-десятичный счетчик в режиме прямого счета будет считать
от 0 (код 0000) до 9 (код 1001), а затем снова от 0 до 9. А 8-разрядный двоично-десятичный
счетчик будет считать от 0 (код 0000 0000) до 99 (код 1001 1001). При инверсном счете двоичнодесятичные счетчики считают до нуля, а со следующим входным импульсом переходят к
максимально возможному двоично-десятичному числу (то есть 9 для 4-разрядного счетчика, 99
для 8-разрядного счетчика). Двоично-десятичные счетчики удобны, например, при организации
десятичной индикации их выходного кода. Применяются они гораздо реже обычных двоичных
счетчиков.
По быстродействию все счетчики делятся на три большие группы:
• асинхронные (или последовательные) счетчики;
• синхронные счетчики с асинхронным переносом (или параллельные счетчики с
последовательным переносом);
• синхронные (или параллельные) счетчики.
17
Принципиальные различия между этими группами проявляются только на втором уровне
представления, на уровне модели с временными задержками. Причем больше всего различия эти
проявляются при каскадировании счетчиков. Наибольшим быстродействием обладают
синхронные счетчики, наименьшим —логическую единицу. Тогда при асинхронные счетчики, наиболее просто управляемые
среди других.
По коэффициенту счета:
п
– двоичные К сч 2 ;
п
– недвоичные К сч 2 .
По порядку смены состояний:
– с естественным порядком смены (каждое последующее состояние отличается на 1 от
предыдущего);
– с произвольным порядком смены.
По изменению значения кода на выходах (код всегда определяется на прямых выхода
триггера):
– суммирующие (каждое последующее значение больше, чем предыдущее);
– вычитающие (каждое последующее значение меньше, чем предыдущее);
– реверсивные (можно изменять направление счета).
10.2. Асинхронные счетчики
Асинхронные счетчики строятся из простой цепочки JK-триггеров, каждый из которых
работает в счетном режиме (Т-триггер). Выходной сигнал каждого триггера служит входным
сигналом для следующего триггера. Очевидно, при объединении T-тригтеров в последовательную
цепочку получим схему счетчика с модулем счета Мсч = 2n, где п —логическую единицу. Тогда при число Т-тригтеров в цепочке.
Такие счетчики называются двоичными. Функциональная схема трехразрядного счетчика на Ттриггерах, осуществляющего сложение и счет входных импульсов с коэффициентом пересчета Мсч
= 23 = 8, приведена на рис. 10.1. Все разряды (выходы) асинхронного счетчика переключаются
последовательно (отсюда название —логическую единицу. Тогда при последовательные счетчики), один за другим, начиная с
младшего и кончая старшим. Каждый следующий разряд переключается с задержкой
относительно предыдущего (рис. 10.2), то есть, вообще говоря, асинхронно, не одновременно с
входным сигналом и с другими разрядами.
Рисунок 10.1 – Асинхронный счетчик на Т-триггерах
Слева располагаются триггеры старших разрядов.
Рисунок 10.2 – Временные диаграммы работы асинхронного счетчика
Можно реализовать счетчик и на D-триггерах, включенных в счетном режиме (рис. 10.3)
D
C
T
Q0
D
T
Q1
C
D
T
C
Рисунок 10.3 – Счетчик на D-триггерах
18
Q2
Чем больше разрядов имеет счетчик, тем большее время ему требуется на полное
переключение всех разрядов. Задержка переключения каждого разряда примерно равна задержке
триггера, а полная задержка установления кода на выходе счетчика равна задержке одного
разряда, умноженной на число разрядов счетчика. Легко заметить, что при периоде входного
сигнала, меньшем полной задержки установления кода счетчика, правильный код на выходе
счетчика просто не успеет установиться, поэтому такая ситуация не имеет смысла. Это
накладывает жесткие ограничения на период (частоту) входного сигнала, причем увеличение, к
примеру, вдвое количества разрядов счетчика автоматически уменьшает вдвое предельно
допустимую частоту входного сигнала.
Таким образом, если нам нужен выходной код асинхронного счетчика, то есть все его
выходные сигналы (разряды) одновременно, то должно выполняться следующее неравенство:
Т>NNtз,
где Т —логическую единицу. Тогда при период входного сигнала, N —логическую единицу. Тогда при число разрядов счетчика, t3 —логическую единицу. Тогда при время задержки одного
разряда.
Надо еще учесть, что за период входного сигнала должно успеть сработать устройство (узел),
на которое поступает выходной код счетчика, иначе счетчик просто не нужен, поэтому
ограничение на частоту входного сигнала обычно бывает еще жестче.
Перед началом счета все триггеры должны быть в исходном состоянии (Q1 = Q2 = Q3 = 0).
Для этого в схемах Т-триггеров предусмотрены установочные входы R, имеющие общую шину
«Установка в 0», на которую поступает импульс сброса. Работу счетчика (рис. 10.1) можно
проанализировать с помощью таблицы переходов, где т —логическую единицу. Тогда при номер входного импульса по порядку
с начала счета:
Табл.10.1.
т
Qз
Q2
Q1
0
0
0
0
]
0
0
1
2
0
1
0
3
0
1
1
4
1
0
0
5
1
0
1
6
1
1
0
7
1
1
1
8
0
0
0
Из таблицы 10.1 видно, что количеству поступивших на вход счетчика импульсов от 0 до 7
соответствует двоичное число, определяемое состояниями триггеров. Например, при поступлении
пятого импульса состояния триггеров (разрядов) Q3 = 1, Q2 = 0, Q1=1 соответствуют двоичному
числу 101. Восьмым им пульсом счетчик обнуляется, и начинается новый счет. Такой счетчик
называется суммирующим.
Если в счетчике с приходом первого импульса записывается максимальное двоичное число
(в трехразрядном счетчике Q1=Q2=Q3=0), которое затем уменьшается с приходом каждого нового
импульса до нуля (в трехразрядном Q1 = Q2 = Qз = 0), то такой счетчик называется вычитающим.
Схему трехразрядного вычитающего счетчика также можно реализовать на основе
последовательной цепочки трех T-триггеров, в которой счетный вход каждого последующего
триггера подключен не к инверсному (как в схеме рис. 10.1), а к прямому выходу предыдущего
триггера при управлении фронтом импульса. Если же триггеры управляются срезом входного
импульса (перепадом 1/0), то при построении суммирующего счетчика вход последующего Tтриггера объединяют с прямым выходом предыдущего, а при построении вычитающего счетчика
—логическую единицу. Тогда при с инверсным.
Таблица состояний вычитающего счетчика (табл. 10.2) имеет вид:
Табл. 10.2
т
Q3
Q2
Q1
19
0
1
i
i
1
1
i
0
2
1
0
1
3
1
0
0
4
0
1
1
5
0
1
0
6
0
0
1
7
0
0
0
8
1
1
1
В составе стандартных серий цифровых микросхем асинхронных счетчиков немного. В
качестве примера на рис. 10.4. приведены три из них: четырехразрядный двоично-десятичный
счетчик ИЕ2, четырехразрядный двоичный счетчик ИЕ5 и восьмиразрядный двоичный счетчик
ИЕ19 (он же сдвоенный четырехразрядный счетчик).
Рис. 10.4. Асинхронные счетчики стандартных серий.
У всех этих счетчиков управление работой очень простое: имеются лишь входы сброса в нуль
или входы установки в 9 (только у ИЕ2). Все асинхронные счетчики работают по отрицательному
фронту входного сигнала С (или, что то же самое, по заднему фронту положительного входного
сигнала). У всех трех счетчиков выделены две независимые части, что увеличивает возможности
их применения. При объединении этих двух частей получается счетчик максимальной
разрядности. Выходы счетчиков обозначают на схемах 0, 1, 2, 3, ... (как номера разрядов
выходного двоичного кода) или 1, 2, 4, 8, ... (как веса каждого разряда двоичного кода).
Счетчик ИЕ2 имеет две части: один триггер (вход С1, выход 1) и три триггера (вход С2 и
выходы 2, 4, 8). Таким образом, он состоит из одноразрядного счетчика и трехразрядного счетчика. Одиночный триггер работает в обычном счетном режиме, изменяя свое состояние по каждому
отрицательному фронту сигнала С1, то есть делит частоту входного сигнала на 2. Три оставшихся
триггера включены таким образом, чтобы считать до 5, то есть делить входную частоту сигнала
С2 на 5. После достижения кода 4 (то есть 100) на выходах 2, 4 и 8 этот трехразрядный счет чик по
следующему отрицательному фронту сигнала С2 сбрасывается в нуль. В результате при
объединении выхода 1 микросхемы со входом С2 мы получаем 4-разрядный двоично-десятичный
счетчик, делящий частоту входного сигнала С1 на 10, сбрасывающийся в нуль после достижения
на выходах 1, 2, 4, 8 кода 9 (то есть 1001) по отрицательному фронту сигнала С1.
Счетчик ИЕ2 имеет два входа асинхронного сброса в нуль R1 и R2, объединенных по функции
И, а также два входа установки в 9 —логическую единицу. Тогда при S1 и S2, также объединенных по функции И, причем
установка в 9 блокирует установку в нуль. Наличие этих входов сброса и установки позволяет
строить на базе счетчика ИЕ2 делители частоты с разными коэффициентами деления. Правда, этот
счетчик используется довольно редко, значительно реже, чем другие асинхронные счетчики ИЕ5 и
ИЕ19.
Таблица истинности асинхронного счетчика ИЕ2 при соединенном выходе 1 и входе С2 (при 4разрядном выходном коде) приведена ниже (табл. 10.3).
Счетчик ИЕ5 точно так же, как и ИЕ2, имеет две части: один триггер (одноразрядный счетчик)
со входом С1 и выходом 1 и три триггера (трехразрядный счетчик) со входом С2 и выходами 2, 4,
8. Оба счетчика двоичные, то есть первый считает до двух, а второй —логическую единицу. Тогда при до 8. При объединении
входа С2 с выходом 1 получается 4-разрядный двоичный счетчик, считающий до 16. Счет
производится по отрицательному фронту входных сигналов С1 и С2. Предусмотрена возможность
сброса счетчика в нуль по сигналам R1 и R2, объединенным по функции И.
Таблица истинности счетчика ИЕ5 при соединении входа С2 и входа 1 (при 4-разрядном
выходном коде) приведена ниже (табл. 10.4).
20
Таблица 10.3. Таблица истинности счетчика ИЕ2
21
Табл. 10.4. Таблица истинности счетчика ИЕ5
Рис. 10.5. Объединение трех счетчиков ИЕ5 для увеличения разрядности.
Объединять счетчики ИЕ5 для увеличения разрядности (каскадировать) очень просто: выход 8
предыдущего счетчика (выдающего более младшие разряды) нужно соединить со входом С1
следующего счетчика (выдающего более старшие разряды). На рис. 10.5 показано соединение трех
счетчиков ИЕ5 для получения 12-разрядного асинхронного счетчика со сбросом в нуль. Точно так
же можно объединять и счетчики ИЕ2, добавляя при этом входы общей установки счетчика в код
99...9. Однако при объединении надо помнить, что добавление каждого нового разряда
увеличивает общую задержку переключения полученного счетчика. Многоразрядный
асинхронный счетчик может получиться неприемлемо медленным.
Счетчик ИЕ19 можно считать сдвоенным вариантом счетчика ИЕ5. Он включает в себя два
идентичных независимых друг от друга 4-разрядных асинхронных счетчика, каждый из которых
имеет свой счетный вход С и свой вход сброса R. Считают оба счетчика, входящие в микросхему,
по отрицательному фронту на своих входах С1 и С2. Сбрасываются они единичными сигналами
на своих входах сброса R1 и R2.
Счетчики, входящие в микросхему ИЕ19, можно использовать самостоятельно, но можно и
объединить их для получения 8-разрядного асинхронного счетчика с выходами 1, 2, 4, 8, 16, 32,
64, 128. Для такого объединения достаточно соединить выход 8 первого счетчика со счетным
входом С2 второго счетчика. Если соединить два счетчика ИЕ19 (рис. 10.6), то получится уже 16разрядный асинхронный двоичный счетчик. При этом выход 8 второго счетчика соединяется со
счетным входом С1 первого счетчика. Однако и в данном случае каждый следующий разряд
переключается с задержкой после переключения предыдущего.
22
Рис. 10.6. Объединение двух счетчиков ИЕ19 для увеличения разрядности.
10.2.1. Реверсивный асинхронный счетчик
Часто используют реверсивные счетчики, которые имеют два счетных входа T(+ ) и T(-). При
поступлении последовательности импульсов на вход T( + ) счетчик работает как суммирующий,
при подаче импульсов на вход T(-) схема выполняет функции вычитающего счетчика. На рис. 10.7
приведено условное обозначение ИМС четырехразрядного реверсивного счетчика с
установочными входами R и S для всех разрядов.
Рис. 10.7. Двоичный реверсивный счетчик
Построить такой счетчик можно двумя путями:
– входы синхронизации второго и последующего триггеров в режиме суммирования
подключаем к инверсным выходам предыдущих триггеров, а в режиме вычитания – к прямым
выходам;
– к выходам счетчика в режиме суммирования подключаются прямые выходы триггеров, а в
режиме вычитания – инверсные, при этом входы синхронизации второго и последующего
триггеров подключены к инверсным выходам предыдущих триггеров.
T
C
Q 0 S 1.1
T
C
Q0
Q1
S 1.2
T
C
Q1
Q2
Q2
V
Рисунок 10.8. – Схема суммирующего и вычитающего (реверсивного) счетчика
V=0 переключатели S1 в верхнем положении – счетчик вычитающий.
V=1 – счетчик суммирующий.
+5В
T
J
C
K
&
&
T
T
J
C
K
&
&
T
J
C
T
K
1
Рисунок 10.9 – Реверсивный счетчик на JK-триггерах
10.3. Синхронные счетчики с асинхронным переносом
Синхронные (или параллельные) счетчики характеризуются тем, что все их разряды в пределах
одной микросхемы переключаются одновременно, параллельно. Это достигается существенным
усложнением внутренней структуры микросхемы по сравнению с простыми асинхронными
счетчиками. В результате полная задержка переключения синхронного счетчика примерно равна
задержке одного триггера, то есть синхронные счетчики гораздо быстрее асинхронных, причем их
быстродействие не падает с ростом количества разрядов выходного кода (конечно, до
определенных пределов).
Управление работой синхронного счетчика гораздо сложнее, чем в случае асинхронного
счетчика, а количество разрядов синхронных счетчиков обычно не превышает четырех. Поэтому
23
синхронные счетчики не всегда могут успешно конкурировать с асинхронными счетчиками,
особенно при невысоких требованиях к быстродействию. Зато и возможностей у синхронных
счетчиков, как правило, гораздо больше, чем у асинхронных, например, они обеспечивают
параллельную запись информации в счетчик и инверсный режим счета.
Для объединения нескольких синхронных счетчиков с целью увеличения числа их разрядов
(для каскадирования) используется специальный выходной сигнал переноса. В зависимости от
принципов формирования этого сигнала переноса и от принципов его использования синхронные
(параллельные) счетчики делятся на счетчики с асинхронным (последовательным) переносом и
счетчики с синхронным (параллельным) переносом (или полностью синхронные счетчики).
Синхронные счетчики с асинхронным переносом занимают промежуточное положение по
быстродействию между асинхронными счетчиками и полностью синхронными счетчиками.
Управление их работой проще, чем у синхронных счетчиков, но сложнее, чем у асинхронных.
Работают данные счетчики по положительному фронту входного сигнала (или, что то же самое, по
заднему фронту отрицательного сигнала). Основная суть их работы сводится к следующему: все
разряды одного счетчика переключаются одновременно, но при каскадировании счетчиков
каждый следующий счетчик (дающий более старшие разряды) переключается с задержкой
относительно предыдущего счетчика (дающего более младшие разряды). То есть задержка
переключения многоразрядного счетчика увеличивается в данном случае не с каждым новым
разрядом (как у асинхронных счетчиков), а с каждой новой (например, 4-разрядной) микросхемой.
Сигнал переноса у этих счетчиков при прямом счете вырабатывается тогда, когда все разряды
равны единице (достигнут максимальный код) и когда приходит входной сигнал. Поэтому сигнал
переноса, повторяющий входной сигнал, будет задержан относительно входного сигнала. И
именно этот сигнал переноса используется в качестве входного для следующего счетчика при
каскадировании. То есть входной сигнал второго счетчика задержан относительно входного
сигнала первого счетчика, входной сигнал третьего счетчика задержан относительно входного
сигнала второго счетчика и т. д.
Временная диаграмма 4-разрядного синхронного счетчика с асинхронным переносом показана
на рис. 10.10. Из рисунка видно, что разряды переключаются одновременно по положительному
фронту входного сигнала (с некоторой задержкой), а отрицательный сигнал переноса также
задержан относительно входного отрицательного импульса. Понятно, что переключение разрядов
счетчика, работающего с этим сигналом переноса в качестве входного, будет происходить с
дополнительной задержкой относительно переключения разрядов данного счетчика.
Рис. 10.10. Временная диаграмма работы синхронного счетчика с асинхронным переносом.
Примерами синхронных счетчиков с асинхронным переносом могут служить двоичнодесятичный счетчик ИЕ6 и двоичный счетчик ИЕ7 (рис. 10.11). Они полностью идентичны по своим возможностям и назначениям входов и выходов, но только счетчик ИЕ6 считает от 0 до 9, а
счетчик ИЕ7 —логическую единицу. Тогда при от 0 до 15. Оба счетчика реверсивные, обеспечивают как прямой счет (по положительному фронту на входе +1), так и обратный счет (по положительному фронту на входе -1).
При прямом счете отрицательный сигнал переноса вырабатывается на выходе >15 (ИЕ7) или >9
(ИЕ6). При обратном (инверсном) счете отрицательный сигнал переноса вырабатывается на
выходе <0 после достижения выходным кодом значения 0000. Имеется возможность сброса
счетчика в нуль положительным сигналом на входе R, а также возможность параллельной записи
в счетчик кода со входов Dl, D2, D4, D8 по отрицательному сигналу на входе -WR. При
параллельной записи информации счетчики ведут себя как регистры-защелки, то есть выходной
код счетчика повторяет входной код, пока на входе -WR присутствует сигнал нулевого уровня.
24
Рис. 10.11. Синхронные счетчики с асинхронным переносом.
Вход параллельной записи обозначается иногда на схемах также -L, -С, а выходы переноса
обозначаются также -CR и -BR.
Режимы работы счетчиков ИЕ6 и ИЕ7 представлены в табл. 10.5.
После сброса счетчик начинает счет по положительным фронтам на счетных входах от
нулевого кода. После параллельной записи счет начинается от числа, записанного в счетчик. После переполнения счетчика ИЕ7 (достижения кода 1111) при прямом счете вырабатывается
отрицательный сигнал переноса >15, повторяющий входной отрицательный импульс на входе +1 с
задержкой. После достижения кода 0000 при обратном счете вырабатывается отрицательный
сигнал переноса <0, повторяющий входной отрицательный импульс на входе -1 с задержкой.
Точно так же работает и счетчик ИЕ6, но у него переполнение будет возникать в режиме прямого
счета при достижении кода 1001.
Таблица 10.5. Таблица режимов работы счетчиков ИЕ6 и ИЕ7
Входные сигналы счета, записи и сброса не должны быть слишком короткими. Не должен быть
слишком малым временной сдвиг между сигналами на входах Dl —логическую единицу. Тогда при D8 и сигналом записи как в
начале импульса записи, так и в его конце (сигнал записи -WR должен начинаться после
установления входного кода, а заканчиваться —логическую единицу. Тогда при до снятия входного кода).
Объединение счетчиков ИЕ7 и ИЕ6 для увеличения разрядности (каскадирование)
осуществляется очень просто: нужно выходы переноса младших счетчиков (дающих младшие
разряды выходного кода) соединить со счетными входами старших счетчиков (дающих старшие
разряды выходного кода). На рис. 10.12 показана организация 12-разрядного счетчика на трех
микросхемах ИЕ7. Этот счетчик может считать как на увеличение (прямой счет), так и на
уменьшение (обратный счет). Возможны также сброс и параллельная запись в счетчики входного
кода. Разряды каждого следующего счетчика будут переключаться одновременно, но с задержкой
относительно переключения разрядов предыдущего счетчика. Точно так же объединяются и
счетчики ИЕ6.
Если необходимо использовать все выходные разряды многоразрядного счетчика
одновременно (как единый код), то необходимо выполнение следующего условия:
T>N(N-триггерахl)tзn+tзс
где Т —логическую единицу. Тогда при период входного сигнала, N —логическую единицу. Тогда при число объединенных микросхем счетчиков, t3n —логическую единицу. Тогда при время
задержки переноса одного счетчика, t3c —логическую единицу. Тогда при время задержки счета (переключения выходного кода)
одного счетчика.
25
Рис. 10.12. Объединение счетчиков ИЕ7 для увеличения разрядности.
10.3. Синхронные счетчики
Синхронные (или параллельные) счетчики представляют собой наиболее быстродействующую
разновидность счетчиков. Наращивание их разрядности при соблюдении определенных условий
не приводит к увеличению полной задержки срабатывания. То есть можно считать, что именно
синхронные счетчики работают как идеальные счетчики, все разряды которых срабатывают
одновременно, параллельно. Задержка срабатывания счетчика в этом случае примерно равна
задержке срабатывания одного триггера. Достигается такое быстродействие существенным
усложнением внутренней структуры микросхемы.
Вместе с тем недостатком синхронных счетчиков является более сложное управление их
работой по сравнению с асинхронными счетчиками и с синхронными счетчиками с асинхронным
переносом. Поэтому синхронные счетчики целесообразно применять только в тех случаях, когда
действительно требуется очень высокое быстродействие, очень высокая скорость переключения
разрядов. Иначе усложнение схемы управления может быть не оправдано.
Рис. 10.13. Временная диаграмма работы синхронных двоичных счетчиков.
Временная диаграмма работы синхронного счетчика (рис. 10.13) отличается от временной
диаграммы синхронного счетчика с асинхронным переносом способом формирования сигнала
переноса, используемого при каскадировании счетчиков для увеличения разрядности. Сигнал
переноса CR (от английского Carry) вырабатывается в данном случае тогда, когда все выходы
счетчика устанавливаются в единицу (при прямом счете) или в нуль (при обратном, инверсном
счете). Входной тактовый сигнал в образовании сигнала переноса при этом не участвует.
При каскадировании (совместном включении для увеличения разрядности), например, двух
счетчиков тактовые входы С обоих счетчиков объединяются, а сигнал переноса первого счетчика
подается на вход разрешения счета (ЕСТ) второго счетчика. В результате второй счетчик будет
считать каждый шестнадцатый входной тактовый импульс (так как он будет срабатывать только
при переносе от первого счетчика). Выходные сигналы второго счетчика будут переключаться по
фронту общего тактового сигнала одновременно с выходными сигналами первого счетчика.
Условием правильной работы будет в данном случае следующее: за период тактового сигнала
должен успеть выработаться сигнал переноса первого счетчика.
Рис. 10.14. Синхронные счетчики стандартных серий.
В стандартные серии микросхем входят несколько разновидностей синхронных
(параллельных) счетчиков (рис. 10.14). Различаются они способом счета (двоичные или двоично26
десятичные, реверсивные или не реверсивные), управляющими сигналами (наличием или
отсутствием сигнала сброса). Все счетчики считают по положительному фронту тактового сигнала, все имеют выход переноса CR и входы расширения для каскадирования. Все счетчики имеют
возможность параллельной записи информации.
Счетчики ИЕ9 и ИЕ10 отличаются друг от друга только тем, что ИЕ9 —логическую единицу. Тогда при двоично-десятичный,
а ИЕ10 —логическую единицу. Тогда при двоичный. Микросхемы имеют вход асинхронного сброса -R, по нулевому уровню на
котором все выходы счетчика сбрасываются в нуль. Счет (только прямой) производится по
положительному фронту на тактовом входе С. Параллельная запись осуществляется синхронно, по
положительному фронту на тактовом входе С при установленном в нуль сигнале разрешения
записи -EWR. Сигналы ECR (Enable Carry —логическую единицу. Тогда при разрешение переноса) и ЕСТ (Enable Count —логическую единицу. Тогда при
разрешение счета) используются при каскадировании микросхем. Разница между этими сигналами
в том, что сигнал ECR не только запрещает счет, как сигнал ЕСТ, но еще и запрещает выработку
сигнала переноса CR. Счет идет при единичных сигналах на обоих входах ЕСТ и ЕСТ и при
единичном сигнале на входе -EWR. Положительный сигнал переноса CR вырабатывается при
максимально возможном коде на выходах счетчика (15 для ИЕ10 и 9 для ИЕ9) и при
положительном сигнале на входе ECR. Режимы работы счетчиков ИЕ9 и ИЕ10 представлены в
табл. 10.6.
Таблица 10.6. Режимы работы счетчиков ИЕ9 и ИЕ10
Счетчики ИЕ12 (двоично-десятичный) и ИЕ13 (двоичный) отличаются от ИЕ9 и ИЕ10 тем, что
они реверсивные, то есть допускают как прямой, так и обратный счет. Кроме того, у них
несколько другое управление. Считают они также по положительному фронту тактового сигнала
С при нулевом уровне на входе разрешения счета ЕСТ. Прямой счет осуществляется при нулевом
уровне на входе управления U/D, обратный —логическую единицу. Тогда при при единичном уровне на входе U/D.
Переключение уровней на входах U/D и ЕСТ допускается только при положительном сигнале на
тактовом входе С. Сброс счетчиков ИЕ12 и ИЕ13 в нуль не предусмотрен, зато имеется
возможность асинхронной параллельной записи информации по нулевому уровню сигнала параллельной записи -WR.
Положительный сигнал на выходе параллельного переноса CR появляется при достижении
максимального кода (15 для ИЕ13 и 9 для ИЕ12) при прямом счете или при достижении нулевого
кода при обратном (инверсном) счете. Имеется также выход последовательного переноса Р,
отрицательный импульс на котором вырабатывается при положительном сигнале CR и повторяет
отрицательный импульс на тактовом входе С (аналогично рассмотренным ранее счетчикам ИЕ6 и
ИЕ7).
Режимы работы счетчиков ИЕ12 и ИЕ13 представлены в табл. 10.7.
Таблица 10.7. Режимы работы счетчиков ИЕ12 и ИЕ13
Микросхемы ИЕ16 (двоично-десятичный счетчик) и ИЕ17 (двоичный счетчик) отличаются от
рассмотренных синхронной параллельной записью по фронту тактового сигнала С, возможностью
прямого и обратного счета и отсутствием сигнала сброса в нуль.
27
Срабатывают счетчики ИЕ16 и ИЕ17 по положительному фронту тактового сигнала С. При
нулевом уровне на входе разрешения записи -EWR по фронту сигнала С в счетчик записывается
информация со входов данных Dl, D2, D4, D8. При единичном уровне на входе -EWR по
положительному фронту сигнала С происходит счет. Направление счета определяется входом U/
D: при единице на этом входе счет прямой, при нуле —логическую единицу. Тогда при обратный. Имеются два входа
расширения: вход разрешения счета -ЕСТ и вход разрешения переноса -ECR. Различаются эти два
входа тем, что сигнал -ECR не только запрещает счет, как сигнал -ЕСТ, но еще и запрещает
выработку сигнала переноса. Переключение уровней на входах U/D, -ЕСТ и -ECR надо
производить только при единичном уровне на тактовом входе С.
Отрицательный сигнал переноса -CR (синхронный) вырабатывается при достижении на
выходах счетчика максимального кода (15 для ИЕ7 или 9 для ИЕ16) при прямом счете или нулевого кода при обратном счете.
Режимы работы счетчиков ИЕ16 и ИЕ17 приведены в табл. 10.8.
Таблица 10.8. Режимы работы счетчиков ИЕ16 и ИЕ17
Возможности применения синхронных (параллельных) счетчиков очень широки. Достаточно
сказать, что они без всяких проблем могут заменить во всех схемах как асинхронные
(последовательные) счетчики, так и синхронные счетчики с асинхронным (последовательным)
переносом. При необходимости достижения максимального быстродействия они имеют большие
преимущества по сравнению со всеми другими счетчиками. Их выходной код устанавливается
одновременно при любом количестве разрядов без применения дополнительных выходных
регистров (которые требовались в случае асинхронных счетчиков и синхронных счетчиков с
асинхронным переносом).
Мы рассмотрим здесь всего несколько схем, иллюстрирующих характерные особенности
именно синхронных счетчиков.
Сначала остановимся на методах каскадирования счетчиков. В отличие от других типов
счетчиков синхронные счетчики можно соединять различными способами, причем способ соединения различен для разного количества микросхем. В качестве примера возьмем микросхемы
ИЕ17.
При объединении двух счетчиков (рис. 10.15) никаких проблем не возникает: выход переноса CR младшего счетчика соединяется со входом разрешения счета старшего счетчика -ЕСТ. На
входы -ECR обоих счетчиков подается нулевой уровень. Условие правильной работы будет
простым и легко выполнимым: период тактового сигнала С не должен быть меньше, чем задержка
выработки сигнала переноса CR.
Рис. 10.15. Объединение двух счетчиков ИЕ17.
При объединении трех счетчиков ситуация несколько усложняется (рис. 10.16). Сигнал с выход
переноса первого счетчика подается на входы -ЕСТ второго и третьего счетчиков. Сигнал с выход
28
переноса второго счетчика подается на вход -ECR третьего счетчика. В результате третий счетчик
будет считать только тогда, когда имеется перенос как у первого счетчика, так и у второго
счетчика. На рисунке для простоты не показано подключение входных и выходных сигналов, не
участвующих в каскадировании.
Рис. 10.16. Объединение трех счетчиков ИЕ17.
Условие правильной работы схемы остается тем же, что и в случае двух счетчиков: период
тактового сигнала С не должен быть меньше задержки выработки сигнала переноса CR.
При объединении четырех (и более) счетчиков уже возникает проблема, так как у старших
счетчиков не остается свободных управляющих входов для собирания всех сигналов переноса
более младших счетчиков. Поэтому в данном случае используется способность входного сигнал ECR запрещать выходной сигнал переноса -CR (рис. 10.17). На четвертый и последующие
счетчики подаются уже не сигналы переноса со всех предыдущих счетчиков, а только с первого и
с предыдущего. На рисунке для простоты не показано подключение входов и выходов, не
участвующих непосредственно в каскадировании.
Рис. 10.17. Объединение четырех счетчиков ИЕ17.
При таком включении происходит уже накапливание задержек сигналов переноса.
Максимальной задержка будет для сигнала переноса второго счетчика. Условие правильной
работы всех счетчиков будет следующее: период тактового сигнала С не должен быть меньше, чем
максимальная суммарная задержка сигналов переноса до входа последнего счетчика. При объединении четырех счетчиков в эту максимальную задержку входят задержка сигнала переноса -CR
микросхемы относительно фронта сигнала С и задержка сигнала переноса -CR относительно
сигнала -ECR. При объединении пяти счетчиков добавится еще одна задержка сигнала переноса CR относительно сигнала -ECR и т. д. Поэтому с увеличением количества объединяемых
счетчиков будет снижаться допустимая тактовая частота.
При необходимости объединения большого количества счетчиков (большего четырех) можно
избежать накопления суммарной задержки переноса, включив на входах старших счетчиков -ЕСТ
логические элементы ИЛИ с нужным числом входов. Эти элементы должны собирать все сигналы
переноса с более младших счетчиков, то есть на их выходах должен быть нуль тогда, когда
сигналы -CR всех предыдущих счетчиков нулевые. При этом, правда, в суммарную задержку
переноса, которая не должна превышать периода тактового сигнала С, войдут задержки этих
самых элементов ИЛИ.
В любом случае при выполнении условия правильной работы счетчиков схема будет работать
как идеальный счетчик, то есть все разряды многокаскадного счетчика будут переключаться
одновременно.
10.4. Недвоичные счетчики
Счетчики с произвольным модулем счета Мсч<>2"-1 (недвоичные) реализуются на основе
двоичных путем исключения их избыточных состояний.
Например, для создания счетчика
с
модулем
3
необходимо использовать схему
двухразрядного двоичного счетчика (Мсч = 22 = 4), в которой требуется исключить одно
29
избыточное состояние (Мсч = 22 —логическую единицу. Тогда при 1 = 3), соответствующее двоичному числу 11 (обнуление
триггеров должно осуществляться с приходом третьего, а не четвертого импульса). Для этого при
построении схемы счетчика на JК-триггерах следует инверсный выход второго триггера соединить
со входом J первого (рис. 7.10).
Рисунок 10.18 – Недвоичный счетчик
Среди недвоичных счетчиков широко применяются десятичные счетчики с модулем счета,
равным 10. На выходе десятичного счетчика число поступающих на его вход импульсов
уменьшается в 10 раз, т.е. представляется в привычном для нас десятичном коде.
Десятичные счётчики строят на основе четырёхразрядных двоичных. Для понижения
коэффициента пересчёта четырехразрядного счётчика с 16 до 10 вводят различные логические
связи. В зависимости от вида логической связи одним и тем же десятичным числам в различных
счётчиках могут соответствовать различные четырёхразрядные двоичные коды. В этом случае
говорят, что счётчики работают в различных двоично-десятичных кодах.
Чаще других употребляется двоично-десятичный код 8-4-2-1. Здесь и далее цифры 8, 4, 2, 1
обозначают веса разрядов двоично-десятичного кода. Преимущество кода в его однозначности.
Другие же коды неоднозначны. Например, в коде 4-2-2-1 десятичное число 4 можно представить
как 1000 или 0110, поэтому существуют таблицы, однозначно закрепляющие за каждым кодом
соответствующее десятичное число.
В таблице приводятся наиболее употребительные двоично-десятичные коды. Код с избытком 3
является самодополняющимся. Для этих кодов характерно то, что при их поразрядном инвертировании получается код числа, дополняющее данное до девяти. Это свойство кода удобно при
построении цифровых приборов, измеряющих знакопеременные величины.
Табл. 10.9. Двоично-десятичные коды
Q,QiQiQi
код 8-4-2Невзвешен
Код с избытком 3
1
ный код
0000
0
0
0001
1
1
0 0 10
2
2
0 0 11
3
3
0
0 10 0
4
1
0 10 1
5
2
0 110
6
4
3
0 111
7
5
4
10 0 0
8
5
10 0 1
9
6
10 10
7
10 11
8
110 0
8
9
110 1
9
1110
6
1111
7
Промышленность выпускает ряд двоично-десятичных счетчиков (как синхронных, так и
асинхронных).
Микросхемы
двоично-десятичных
счетчиков
рассмотрены
выше
в
соответствующих разделах.
Способы построения счетчиков с произвольным К сч :
1. Введение обратных связей в счетчик с помощью дополнительных логических элементов.
30
2. Использование программируемых счетчиков.
3. Использование дешифратора и мультиплексора для формирования нужного К сч .
10.5 Программируемые счетчики
Программируемые счетчики – это счетчики, до начала работы в которых можно записать
начальные значения, а потом проводить досчет до конечного значения. Приведем пример
двоичного программированного счетчика (рис. 10.12).
+5В
C
Ст2
&
S
D0
Q0
J
D1
Q1
Q2
C
D2
D3
Q3
K
1
&
R
T
Q
Q
L
а)
б)
Рисунок 10.19 – Схематическое изображение программируемого счетчика (а) и его
функциональная схема (б)
На рис. 10.19 а показано схематическое изображение программируемого счетчика. На нем
вход L – это разрешение записи кода.
Из функциональных возможностей интегральных схем программируемых счетчиков можно
выделить, что, как правило, интегральные схемы программируемых счетчиков представляются
рекурсивными счетчиками, в которых направление счета определяется либо подачей “0”, либо “1”
на специальный вход управления направлением счета. Так же программируемый счетчик может
работать, как суммирующий счетчик (когда коэффициент счета идет на увеличение) или в
качестве вычитающего (когда счет идет на уменьшение).
10.6. Практическое применение счетчиков
10.6.1. Применение асинхронных счетчиков
Основное применение асинхронных счетчиков состоит в построении всевозможных делителей
частоты, то есть устройств, выдающих выходной сигнал с частотой, в несколько раз меньшей, чем
частота входного сигнала. В данном случае нас интересует не выходной код счетчика, то есть не
все его разряды одновременно, а только один разряд, поэтому взаимные задержки отдельных
разрядов не играют роли, полная задержка переключения счетчика не имеет значения.
Простейший пример делителя частоты на два —логическую единицу. Тогда при это триггер в счетном режиме или счетчик,
выходным сигналом которого является выход первого, младшего разряда.
При построении делителей частоты иногда важна не только частота выходного сигнала, но и
его форма, его скважность, то есть отношение периода следования импульсов к длительности этих
импульсов. В таких случаях чаще всего требуется меандр, то есть цифровой сигнал со
скважностью, равной двум (длительность импульсов равна длительности паузы между ними).
Получить меандр из любого сигнала довольно просто: надо использовать дополнительный
делитель частоты на 2, правда при этом частота выходного сигнала уменьшится еще вдвое.
Простейший пример такого делителя частоты на десять приведен на рис. 10.20. В делителе
использован счетчик ИЕ2, у которого одноразрядный внутренний счетчик включен после трехразрядного внутреннего счетчика. Трехразрядный счетчик делит частоту входного сигнала на 5, но
выходные импульсы имеют скважность, не равную двум (она равна 5). Одноразрядный счетчик
делит частоту еще вдвое и одновременно формирует меандр. Задержки переключения разрядов
счетчика относительно друг друга на рисунке не показаны (применяем первый уровень
представления, логическую модель).
31
Рис.10.20. Делитель частоты на 10, выдающий меандр.
Иногда возникает задача деления частоты входного сигнала в произвольное число раз (не в 10
и не в 2n, что легко обеспечивается самой структурой стандартных счетчиков). В этом случае
можно организовать сброс счетчика при достижении им требуемого кода путем введения
обратных связей.
Рис. 10.21. Делитель частоты на 9 с обратными связями.
Например, на рис. 10.21 показан простейший делитель частоты на 9 на основе счетчика ИЕ5.
При достижении его выходным кодом значения 9 (то есть 1001) счетчик автоматически сбрасывается в нуль по входам R1 и R2, и счет начинается снова. В результате частота выходного сигнала
в 9 раз меньше частоты входного сигнала. При этом скважность выходного сигнала не равна двум.
Временная диаграмма показана на рисунке для первого уровня представления (без учета
временных задержек).
Если в числе, на которое надо делить частоту больше двух единиц (например, 15, то есть 1111,
или 13, то есть 1101), то для формирования сигнала сброса надо использовать элементы 2И, ЗИ
или 4И для объединения всех выходов, равных единице. В результате можно построить делитель
входной частоты в любое число раз от 2 до 2 N, где N —логическую единицу. Тогда при число разрядов используемого счетчика.
Правда, при организации обратных связей надо учитывать ограничение на быстродействие
счетчика. Все разряды, используемые для обратной связи, должны успеть переключиться за один
период входного сигнала. Скважность выходного сигнала может принимать в данном случае
самые разные значения, например, выходной сигнал может представлять собой очень короткие
импульсы.
На асинхронных счетчиках можно строить также управляемые делители частоты, то есть такие
делители, выходная частота которых определяется управляющим кодом. На рис. 10.22 показан
делитель на 2n, где n —логическую единицу. Тогда при целое. Восьмиразрядный счетчик ИЕ19 работает по входному сигналу с
тактовой частотой fT, а выходной 8-входовой мультиплексор КП7 передает на выход схемы один
из 7 разрядов счетчика или же входной сигнал. Выбор номера канала производится входным
управляющим 3-разрядным кодом. Например, при тактовой частоте fT = 10 МГц, то есть при
периоде входного сигнала 100 нс период выходного сигнала может составлять 100 нс, 200 нс, 400
нс, 800 нс, 1,6 мкс, 3,2 мкс, 6,4 мкс, 12,8 мкс.
Рис. 10.22. Управляемый делитель частоты на асинхронном счетчике.
32
В момент переключения управляющего кода на выходе схемы могут появиться нежелательные
короткие импульсы, так как никакой синхронизации управляющего кода не предусмотрено.
Поэтому схема должна работать так: сначала задается входной управляющий код, а уже потом
разрешается работа той схемы, на которую поступает сформированный нашей схемой выходной
сигнал. В этом случае никаких проблем не будет. Не играют роли в данном случае и задержки
переключения разрядов счетчика, так как всегда используется только один его разряд. Главное,
чтобы с частотой fT переключался первый разряд счетчика.
Конечно, применение асинхронных счетчиков не ограничивается только делителями частоты.
В случаях, когда высокого быстродействия не требуется, когда переходные процессы на выходах
счетчика не имеют значения (при правильной синхронизации), асинхронные счетчики вполне
могут заменить более быстрые синхронные счетчики. Доля таких задач составляет около 20% от
общего числа.
Если же включить на выходе асинхронного счетчика выходной параллельный регистр (рис.
10.23), то можно обеспечить одновременное переключение всех выходных разрядов счетчика.
Рис. 10.23. Включение выходного регистра для одновременного переключения разрядов
выходного кода.
Данная схема будет работать правильно, если период следования входных тактовых импульсов
будет больше, чем время установления всех разрядов счетчика (в нашем случае —логическую единицу. Тогда при 8-разрядного
счетчика ИЕ19). Инвертор необходим, так как счетчик срабатывает по отрицательному фронту
входного сигнала, а регистр —логическую единицу. Тогда при по положительному фронту. Хотя данное решение устраняет
главный недостаток асинхронного счетчика —логическую единицу. Тогда при неодновременность установления его выходных
разрядов, однако второй недостаток —логическую единицу. Тогда при большая задержка установления выходного кода —логическую единицу. Тогда при
сохраняется. Его устранить невозможно, можно только перейти на другие, более быстрые
счетчики.
В заключение данного раздела надо отметить, что асинхронные счетчики, как и другие
цифровые схемы, предъявляют требования к длительности входных сигналов. Например, не должны быть слишком короткими сигналы на тактовых входах и на входах сброса и установки. Не
должны быть слишком затянутыми фронты входных сигналов. Тактовые сигналы и сигналы
сброса не должны приходить со слишком малыми задержками друг относительно друга.
10.6.2. Применение синхронных счетчиков с асинхронным переносом.
Применение синхронных счетчиков с асинхронным переносом очень многообразно. Например,
они могут делить частоту входного сигнала, считать входные импульсы, формировать пачки
импульсов, измерять длительность временного интервала, формировать сигналы заданной
длительности, измерять частоту входных импульсов, последовательно переключать входные и
выходные каналы, формировать сложные последовательности сигналов, перебирать адреса памяти
и многое другое. Мы рассмотрим лишь несколько наиболее типичных примеров.
В качестве делителя частоты входного сигнала синхронные счетчики с асинхронным
переносом очень удобны, так как в них сочетается сравнительно высокая скорость работы с
довольно простым управлением. Удобно также и то, что у них имеется режим обратного счета. На
этих счетчиках можно строить делители частоты с произвольно изменяемым с помощью входного
кода коэффициентом деления. Такие делители находят, например, широкое применение в аналогоцифровых системах, работающих с аналоговыми сигналами разной частоты.
Простейший пример 8-разрядного делителя частоты на счетчиках ИЕ7 показан на рис. 10.24.
На вход счетчиков подается 12-разрядный управляющий код, определяющий коэффициент
деления входной частоты. Этот код записывается в счетчики по сигналу переноса <0 старшего
33
счетчика. С этого кода начинается затем счет на уменьшение. Когда счетчики отсчитают
количество входных импульсов, равное входному коду, снова выработается сигнал переноса
старшего счетчика и снова запишет входной код в счетчики. Коэффициент деления будет равен
(N+1) при входном коде N. Отрицательный выходной сигнал будет по форме повторять входной,
но с полной задержкой переноса, а его частота будет меньше частоты входного сигнала в (N+1)
раз. При 12-разрядном входном коде максимальный коэффициент деления составит 4096, а
минимальный —логическую единицу. Тогда при 1.
Рис. 10.24. Делитель частоты с коэффициентом деления, задаваемым входным кодом.
Чтобы сформулировать условия правильной работы данного делителя частоты, надо прежде
всего отметить, что запись входного кода в счетчики производится отрицательным уровнем сигнала -WR, то есть передним фронтом входного отрицательного импульса, а счет производится
положительным фронтом сигнала -1, то есть задним фронтом входного отрицательного импульса.
Отсюда следует, что входной импульс должен быть достаточно коротким. Если он записывает код
в счетчики своим передним фронтом, он уже не должен своим задним фронтом переключать
счетчики по входу -1. Поэтому длительность входного отрицательного импульса не должна
превышать полного времени переключения счетчиков и записи в них входного кода. В нашем случае это три задержки переноса и задержка записи в счетчик.
Если частота входного сигнала большая (например, больше 10 МГц), то нормальная
длительность входного сигнала получается сама собой. Но частота входного сигнала не может
быть и слишком большой. Иначе в процессе записи счетчик пропустит один из входных
импульсов или даже несколько. То есть от переднего фронта входного отрицательного сигнала до
заднего фронта следующего входного отрицательного сигнала должны успеть сработать все
счетчики и должна произойти запись в счетчики (суммарное время задержки опять же включит в
себя сумму задержек переноса всех счетчиков и задержку записи). То есть ограничения на
входную частоту будет тем жестче, чем больше счетчиков мы объединяем для увеличения
количества разрядов. В данном случае важно именно количество примененных микросхем, а не
количество используемых разрядов, как у асинхронных счетчиков.
Для решения часто встречающейся на практике задачи подсчета количества пришедших
входных импульсов необходимо всего лишь объединить несколько микросхем счетчиков с целью
получения требуемого числа разрядов. Например, если количество входных импульсов не
превышает 255, то достаточно двух 4-разрядных счетчиков, если оно не больше 65535, то надо
объединить уже четыре 4-разрядных счетчика. Так как в этом случае нас интересуют все
выходные разряды одновременно, необходимо обеспечить, чтобы за период входных импульсов
переключались все микросхемы счетчиков.
Обеспечить одновременность переключения всех выходных разрядов счетчика при счете
входных импульсов можно, как и в случае асинхронных счетчиков, за счет включения выходного
параллельного регистра, срабатывающего по фронту (рис. 10.25). Данное решение довольно
универсально, оно может использоваться в самых разных ситуациях, когда необходим весь выходной код счетчика целиком. Код на выходе регистра будет удерживаться в течение всего периода
входных импульсов. Правда, быстродействие счетчика от этого не повышается.
34
Рис. 10.25. Включение выходного регистра для одновременного переключения разрядов
выходного кода.
Рис. 10.26. Формирователь пачки из восьми импульсов.
Формирование пачки (группы) входных импульсов с заданным количеством импульсов —логическую единицу. Тогда при
довольно распространенная задача. Например, такое формирование необходимо при организации
обмена информацией в последовательном коде. Если в качестве преобразователя параллельного
кода в последовательный используется 8-разрядный регистр сдвига, то ему в качестве
синхросигнала необходима пачка из восьми импульсов. Схема формирователя такой пачки
импульсов показана на рис. 10.26, а временная диаграмма ее работы —логическую единицу. Тогда при на рис. 10.27.
Рис. 10.27. Временная диаграмма работы формирователя пачки импульсов.
По сигналу Старт (положительный фронт) переключается первый триггер, использующийся
для синхронизации. По первому положительному фронту тактового сигнала с генератора
переключается второй триггер, разрешающий прохождение импульсов с генератора на выход
через элемент 2И-НЕ, а также разрешающий работу счетчика ИЕ7.
После того как на Выход 1 схемы пройдут восемь отрицательных импульсов, на выходе 8
счетчика выработается единица, что приведет к сбросу в исходное нулевое состояние обоих
триггеров (коротким отрицательным импульсом на выходе нижнего по рисунку элемента 2И-НЕ)
и к запрету прохождения импульсов на выход. Работа формирователя возобновится после
следующего сигнала Старт.
На основе счетчиков довольно просто строить формирователи временных интервалов с
длительностью, задаваемой внешним кодом. Такие формирователи находят широкое применение,
например, в различных измерительных устройствах. Так как формирователь временных
интервалов обычно работает с кварцевым тактовым генератором, возможны два подхода к его
построению.
При первом подходе входной стартовый импульс синхронизируется с тактовым сигналом, в
результате чего выходной импульс заданной длительности может начаться не сразу после
стартового импульса, а через какое-то время, меньшее периода тактового сигнала. Длительность
формируемого временного интервала будет в этом случае абсолютно точно известна и будет равна
целому числу периодов тактового генератора. Именно так было сделано в предыдущей
35
рассмотренной нами схеме (сигнал Выход 2 на рис. 5.15 как раз и будет формируемым сигналом с
заданной длительностью).
При втором подходе выходной импульс заданной длительности начинается сразу после
входного сигнала, но длительность его может отличаться от заданной на какое-то время, меньшее
периода тактового сигнала. Иногда это более приемлемое решение, особенно при больших
длительностях выходного сигнала, значительно больших, чем период тактового сигнала. Схема
формирователя временного интервала, построенного в соответствии с этим вторым подходом,
показана на рис. 10.28.
Рис. 10.28. Формирователь временного интервала.
Работа схемы начинается с подачи короткого отрицательного импульса -Старт. Он
перебрасывает триггер, который разрешает работу счетчиков снятием сигнала параллельной
записи -WR. По отрицательному фронту входного сигнала начинается положительный выходной
сигнал заданной длительности. Счетчики начинают считать на уменьшение кода по
положительным фронтам тактового сигнала с генератора. Когда они досчитают до нуля,
вырабатывается сигнал переноса, перебрасывающий триггер в исходное состояние. Работа схемы
возобновится после следующего сигнала -Старт.
Если входной код равен 1, то длительность выходного сигнала составит от Т до 2Т, где Т —логическую единицу. Тогда при
период тактового сигнала. Если входной код равен N (до 255), то длительность выходного сигнала
составит от NT до (N+1)T в зависимости от момента прихода входного сигнала по отношению к
тактовому сигналу. Абсолютная погрешность выдержки длительности выходного сигнала в
любом случае не превышает периода тактового сигнала Т.
Эту же самую схему вполне можно использовать в тех случаях, когда необходимо получить
убывающий код от заданного числа до нуля. При этом сигнал с выхода триггера будет только
внутренним сигналом схемы, а выходными сигналами схемы будут выходные разряды счетчиков.
Иногда бывает необходимо сформировать импульс требуемой длительности, но одновременно
иметь не убывающий, а возрастающий код (от нуля до заданного значения). В таком случае схема
получится несколько сложнее. Пример возможного решения формирователя импульса заданной
длительности показан на рис. 10.29.
По сигналу Старт (положительный фронт) перебрасывается левый по рисунку триггер,
который начинает формировать выходной сигнал и разрешает работу счетчика (снимая сигнал
сброса R). Счетчик считает на увеличение по положительным фронтам тактового сигнала от нуля.
Когда выходной код счетчика достигает величины входного кода, срабатывает правый по рисунку
триггер, завершающий процесс формирования выходного сигнала. Счетчик сбрасывается в нуль,
правый триггер по следующему фронту попадает в исходное состояние. Новый цикл начнется с
приходом следующего сигнала Старт.
Рис. 10.29. Формирователь импульса заданной длительности (вариант с нарастающим кодом).
36
Если входной код равен 1, то длительность выходного сигнала составит от Т до 2Т, где Т —логическую единицу. Тогда при
период тактового сигнала генератора. Если входной код равен N, то длительность выходного сигнала будет равна от NT до (N+1)T в зависимости от временного сдвига между сигналом Старт и
тактовым сигналом. В любом случае абсолютная погрешность времени выдержки выходного
сигнала не превысит периода тактового сигнала Т.
Счетчики также широко применяются в различных измерителях длительности входных
сигналов. Для этого они отсчитывают импульсы тактового кварцевого генератора в течение длительности входного сигнала. После окончания входного сигнала в счетчике остается код,
пропорциональный длительности этого сигнала. Пример практической схемы такого измерителя
показан на рис. 10.30.
Рис. 10.30. Измеритель длительности входного сигнала.
Рис. 10.31. Временная диаграмма работы измерителя длительности входного сигнала.
Работа схемы начинается по короткому управляющему импульсу Старт, который сбрасывает
счетчик в нуль и переводит всю схему в режим счета, разрешая прохождение сигнала с тактового
генератора на вход +1 счетчика при положительном входном сигнале. С началом входного сигнала
импульсы с генератора поступают на вход счетчика, и счетчик их считает. После окончания
входного сигнала поступление импульсов на вход счетчика прекращается, триггер
перебрасывается в исходное состояние и сообщает отрицательным фронтом на своем инверсном
выходе о готовности выходного кода (сигнал Готовность). Работа схемы возобновится по
следующему импульсу Старт. Временная диаграмма работы измерителя длительности входного
сигнала приведена на рис. 10.31.
Выходной код N измерителя связан с длительностью входного сигнала t простым
соотношением:
t = NT,
где Т —логическую единицу. Тогда при период тактового сигнала. Абсолютная погрешность измерения не превышает
величины ±Т. Поэтому для уменьшения относительной погрешности измерения необходимо
увеличивать частоту тактового генератора и увеличивать разрядность счетчика.
Счетчики также применяются и для измерения частоты входного цифрового сигнала.
Частоту входного сигнала можно измерить двумя путями: косвенным, то есть измерением
периода входного сигнала (по принципу, рассмотренному только что) и вычислением затем
частоты (по формуле: fBX = 1/Твх) или же прямым измерением частоты. Первый метод требует
вычислений с помощью компьютера или микроконтроллера, второй не требует никаких
дополнительных вычислений. Поэтому мы рассмотрим здесь реализацию метода прямого
измерения частоты.
В соответствии с этим методом необходимо сформировать временное окно с заданной
длительностью to, в течение которого надо сосчитать количество N периодов входного сигнала Т
(рис. 10.32). В этом случае будет выполняться соотношение:
to = NT или f=N/to,
37
где f —логическую единицу. Тогда при это частота входного сигнала, равная 1/Т. То есть частота входного сигнала
пропорциональна коду N, а коэффициент пропорциональности равен I/to. Если, например, выбрать
to = 1 с, то код N будет равен частоте входного сигнала в герцах, а при to = 1 мс код N будет равен
частоте входного сигнала в килогерцах.
Рис. 10.32. Измерение частоты входного сигнала прямым методом.
Если длительность временного окна —логическую единицу. Тогда при строго постоянная величина, то погрешность измерения
частоты будет определяться только погрешностью подсчета кода N. Абсолютная погрешность
подсчета кода N не превысит единицы, а относительная погрешность не будет более 1/N. Понятно,
что для увеличения точности измерения частоты надо увеличивать N, то есть необходимо
увеличивать длительность временного окна t0. Однако при этом автоматически увеличивается
время измерения.
Схема измерителя частоты (рис. 10.33) практически не отличается от схемы измерителя
длительности входного сигнала (рис. 10.30). Только в данном случае в качестве измеряемого сигнала будет использоваться сигнал временного окна, а в качестве тактового сигнала —логическую единицу. Тогда при входной
сигнал. Для формирования сигнала временного окна можно применить схему рис. 10.26 (сигнал
Выход 2), которая обеспечивает постоянную длительность выходного сигнала.
Рис. 10.33. Измеритель частоты входного сигнала прямым методом.
Еще одно широко распространенное применение счетчиков —логическую единицу. Тогда при последовательное
переключение (сканирование) нескольких устройств, узлов, индикаторов, каналов передачи и т. д.
Имеется, например, группа устройств, которые должны по тем или иным причинам работать не
одновременно, а по очереди, так, что в каждый момент активным является только одно
устройство, причем очередь эта замкнута в кольцо, и после последнего устройства начинает
работать первое. Или же имеется несколько каналов связи (входных или выходных линий),
которые надо так же по очереди подключать к одному выходу (при выходных каналах) или к
одному входу (при входных каналах).
Во всех подобных случаях опрос, переключение, сканирование может производить счетчик с
нужным числом разрядов. Счетчик с числом разрядов n может обслуживать 2n устройств (или
каналов).
Рис. 10.34. Схема последовательного переключения выходных каналов.
В качестве первого примера рассмотрим схему переключения выходных каналов (рис. 10.34).
Она последовательно, по очереди, циклически коммутирует один входной сигнал на восемь
выходов, для чего используются счетчик, тактируемый сигналом задающего генератора, и
38
дешифратор, работающий в качестве демультиплексора. Каждый из выходных каналов активен
(то есть подключен) в течение одного периода тактового сигнала, а затем пассивен (то есть
отключен) в течение семи периодов тактового сигнала. Предусмотрена возможность начального
сброса схемы с помощью сигнала Сброс.
Используя данную схему, надо учитывать, что в момент переключения каналов может
искажаться (обрезаться) выходной сигнал. Поэтому лучше всего обеспечить, чтобы входной
сигнал приходил только тогда, когда переключения каналов не производится. Или на время
передачи вообще останавливать процесс перебора каналов путем запрета прохождения импульсов
с генератора на вход счетчика, а после окончания передачи снова разрешать последовательный
перебор каналов.
Рис. 10.35. Схема последовательного переключения входных каналов.
Второй пример, который мы рассмотрим, это схема, решающая обратную задачу —логическую единицу. Тогда при
переключение входных каналов (рис. 10.35). Данная схема последовательно, циклически передает
один из восьми входных сигналов на выход. Как и в предыдущем случае, перебор каналов
осуществляется счетчиком, тактируемым сигналом с генератора. Непосредственно коммутация
сигналов производится мультиплексором, на адресные входы которого подаются три разряда
счетчика. Предусмотрена возможность начального сброса схемы с помощью сигнала Сброс.
В момент переключения каналов здесь также возможно искажение (обрезание) коммутируемых
сигналов. Поэтому желательно обеспечить передачу сигналов в момент, когда переключения
каналов нет. Или же надо останавливать процесс перебора каналов на время приема сигнала из
выбранного канала путем запрета прохождения тактовых импульсов на вход счетчика, а затем
снова запускать перебор каналов.
Еще одно применение счетчиков из этой же области состоит в организации так называемой
динамической индикации.
Суть динамической индикации состоит в следующем. Если используется табло из нескольких
индикаторов (одиночных светодиодов, светодиодных семисегментных индикаторов, светодиодных матричных индикаторов и т. д.), то совсем не обязательно, чтобы все эти индикаторы
горели постоянно, одновременно. Можно зажигать их по очереди, что существенно сократит
потребляемый всей схемой ток питания. Например, если в каждый момент времени горит только
один индикатор из имеющихся восьми, то ток потребления индикаторов сократится в восемь раз.
Учитывая, что каждый светящийся светодиод требует тока порядка 1—логическую единицу. Тогда при5 мА, такой подход может
дать большой выигрыш, особенно в случае матричных индикаторов, содержащих несколько
десятков светодиодов. А инерционность человеческого глаза приводит к тому, что вспышки света
с частотой больше 20 Гц воспринимаются как непрерывное свечение. Так что при достаточной
частоте перебора индикаторов глазу не будет заметно последовательное их включение.
На рис. 10.36 приведен пример схемы динамической индикации на восьми индикаторах. Для
последовательного перебора индикаторов применяется счетчик, соединенный с дешифратором.
Выходные сигналы дешифратора используются в качестве сигналов разрешения свечения для
индикаторов. Частота сигнала тактового генератора, с которым работает счетчик, должна
составлять не менее 160 Гц, чтобы каждый индикатор загорался не реже, чем с частотой 20 Гц.
При этом нельзя также выбирать слишком большую частоту тактового генератора, так как в
моменты переключения ток потребления микросхем сильно возрастает из-за паразитных емкостей,
и при большой частоте весь эффект снижения потребления может сойти на нет.
39
Рис. 10.36. Схема динамической индикации на восьми индикаторах.
Счетчики часто используют также для организации всевозможных таймеров, часов, то есть
схем счета времени, выходной код которых необходимо время от времени читать. Для этого на
вход счетчика подается сигнал образцовой частоты с кварцевого генератора. При этом возникает
следующая проблема. Если чтение происходит в тот момент, когда счетчики переключаются, то с
выходов счетчиков может быть считан случайный код, который не соответствует ни предыдущему
установившемуся значению, ни последующему установившемуся значению. Можно, конечно, на
время чтения кода остановить счет, но тогда ход часов собьется.
Рис. 10.37. Схема таймера с чтением выходного кода.
Пример решения данной проблемы приведен на рис. 10.37. Здесь выходной код счетчика на
каждом такте записывается в выходной регистр с разрешением записи ИР27. А в момент чтения
кода (при положительном сигнале Чтение) запись в регистр запрещается. В результате в течение
всей длительности сигнала Чтение выходной код схемы будет неизменным, хотя счетчик будет
продолжать считать без всяких помех, и ход часов не собьется.
Интересная особенность счетчиков ИЕ6 и ИЕ7 состоит в том, что они могут работать не только
в режиме счета, но и в режиме повторителя входных сигналов данных. В режиме параллельной
записи в счетчик при нулевом сигнале на входе -WR выходные сигналы счетчика будут повторять
любые изменения входных сигналов данных, то есть счетчик работает по сути как регистр,
срабатывающий по уровню стробирующего сигнала. В ряде случаев такая особенность очень
удобна, так как она позволяет существенно упростить аппаратуру.
Рис. 10.38. Варианты мультиплексирования выходного кода счетчика с применением
мультиплексора (а) и без него (б).
Пусть, например, необходимо выдавать на вход схемы один из двух входных кодов: код со
счетчика, или код с регистра (то есть требуется мультиплексирование двух кодов). Эту задачу
можно решить, применяя двухканальный мультиплексор (рис. 10.38,а), а можно решить проще —логическую единицу. Тогда при
подавая код с регистра на входы данных счетчика и переводя в нужный момент счетчик в режим
параллельной записи (рис. 10.38,6). В обоих случаях переключение кодов, подаваемых на выход
40
схемы, производится сигналом Упр. Правда, во втором случае счетчик возобновляет свой счет
(после снятия сигнала записи -WR) с кода, записанного в регистр. Если это неприемлемо, то
можно воспользоваться входом сброса счетчика в нуль R.
И в заключение данного раздела мы рассмотрим две более сложные схемы на основе
счетчиков. Это генератор прямоугольных импульсов с изменяемой частотой и длительностью
импульса и быстродействующий высокоточный измеритель частоты входного сигнала с большим
диапазоном измеряемых частот.
Генерация прямоугольных импульсов —логическую единицу. Тогда при это довольно часто встречающаяся задача, в
частности при разработке, отладке, тестировании электронной аппаратуры. От генератора прямоугольных импульсов требуется выдача импульсов заданной длительности при заданной паузе
между импульсами (или, что то же самое, формирование импульсов заданной длительности и
частоты следования). Желательно, чтобы диапазон изменения длительности импульсов и пауз
между ними был как можно шире. Желательно также, чтобы был предусмотрен режим разового
запуска (то есть остановка генерации после окончания одного выходного импульса) и
автоматического запуска (то есть генерация периодической последовательности импульсов до
прихода внешней команды остановки).
Предлагаемая здесь схема генератора не претендует, конечно, на рекордные характеристики,
но она вполне может стать реальным удобным инструментом для разработчика цифровой
аппаратуры, особенно если управление генератором поручить компьютеру с установленной на
нем развитой сервисной управляющей программой. Благодаря своей простоте и наглядности
схема эта может служить образцом для разработки более сложных генераторов импульсов,
например, имеющих более высокое быстродействие, больший диапазон изменения длительности
импульсов и их частоты, обеспечивающих генерацию импульсов с разной амплитудой и
полярностью.
В основе генератора (рис. 10.39) —логическую единицу. Тогда при два 16-разрядных счетчика, выполненных на основе
микросхем ИЕ7. Один из этих счетчиков (нижний на схеме) отсчитывает длительность выходного
импульса, другой (верхний на схеме) —логическую единицу. Тогда при отсчитывает длительность паузы. Коды длительности
импульса и паузы подаются соответственно на входы данных верхнего и нижнего счетчиков (эти
коды могут храниться, например, в регистрах, не показанных на схеме). Счетчики импульса и
паузы работают по очереди, что определяется управляющими сигналами на их входах
параллельной записи -WR, которые также запрещают прохождение на входы -1 тактовых
импульсов с помощью элементов 2И-НЕ. Эти управляющие сигналы поступают с прямого и инверсного выходов триггера ТМ2, на входы -R и -S которого подаются сигналы переноса с выходов
<0 обоих счетчиков.
Рис. 10.39. Счетчики длительности импульса и паузы для генератора прямоугольных
импульсов.
В результате, когда один счетчик считает, другой находится в режиме параллельной записи и
не считает. После того как считающий счетчик досчитает до нуля, он перебросит выходной
триггер, который переведет этот счетчик в состояние параллельной записи, запретит поступление
на его вход тактовых импульсов и разрешит считать другому счетчику. Описанная
41
последовательность действий повторится уже для другого счетчика. И этот процесс будет
повторяться до тех пор, пока разрешена генерация.
В данном случае смело можно одновременно использовать как вход -R, так и вход -S триггера,
так как сигналы, приходящие на них, гарантированно разнесены во времени. Сигнал с прямого
выхода триггера служит выходным сигналом всего генератора в целом. Разрешается генерация
положительным сигналом Разр. Когда генерация запрещена (нулевой сигнал Разр.) триггер
сброшен в нуль по входу -R, и оба счетчика находятся в состоянии параллельной записи. Поэтому
генератор всегда начинает работу с отработки паузы заданной длительности, а потом
отрабатывает выходной импульс заданной длительности.
Сформулируем условия правильной работы данной схемы.
Во-первых, как и в случае управляемого делителя частоты, перевод счетчиков из режима счета
в режим параллельной записи осуществляется передним (отрицательным) фронтом тактового
отрицательного импульса, а счет производится задним (положительным) фронтом отрицательного
тактового импульса. Поэтому отрицательный тактовый импульс должен быть достаточно
коротким. Один и тот же тактовый импульс не должен своим передним фронтом менять режим
счетчиков, а задним фронтом переключать счетчики по входу -1. Длительность тактового
отрицательного импульса не должна превышать полного времени переключения режимов счетчиков, включающего в себя четыре задержки переноса счетчиков, задержку переключения
выходного триггера и задержку элементов 2И и 2И-НЕ.
Во-вторых, частота тактового сигнала не должна быть слишком большой, чтобы за время
переключения режимов на вход -1 не пришел еще один положительный фронт тактового сигнала.
Иначе этот фронт будет потерян. То есть от момента отрицательного фронта тактового импульса
до момента положительного фронта следующего тактового импульса схема должна успеть
полностью закончить переключение режимов счетчиков.
Пусть, например, мы хотим выбрать максимальную тактовую частоту 10 МГц (период Тт = 100
нc). Посмотрим, можно ли использовать микросхемы счетчиков серии КР1533. Для счетчиков
КР1533ИЕ7 задержка сигнала переноса составляет не более 18 нc. Для четырех микросхем
задержка переноса составит 72 нc. Тогда на сумму задержек триггера, элемента 2И и элемента 2ИНЕ остается не более 28 нc. Следовательно, если мы возьмем эти элементы из более быстрых
серий (например, КР531 или КР1531), мы легко удовлетворим это требование.
При величине кода импульса N длительность импульса Ти составит (N+1) • Тт. При величине
кода паузы М длительность паузы Тп составит (М+1) • Т т. Период выходных импульсов Твых
будет равен (M+N+2) • Тт. Коды М и N могут принимать значения от 0 до 65535. То есть
минимальная длительность импульса и паузы равна Тт, максимальная длительность импульса и
паузы равна 65536 Тт, минимальная длительность периода выходного сигнала равна 2Тт, а
максимальная —логическую единицу. Тогда при 131072 Тт. Например, при тактовой частоте 10 МГц максимальный период
выходного сигнала будет равен 13,1072 мс, а минимальный —логическую единицу. Тогда при 200 нc.
Для расширения диапазона изменения периода выходного сигнала можно применить
управляемый делитель тактовой частоты. Другой возможный путь —логическую единицу. Тогда при наращивание разрядности
счетчиков —логическую единицу. Тогда при приводит к снижению максимально допустимой тактовой частоты, так как
обязательно вызывает увеличение задержек переключения счетчиков. К тому же, как правило, нет
необходимости задавать длительность периода выходного сигнала, скажем, в 1 секунду с
абсолютной погрешностью 100 нc (относительная погрешность —логическую единицу. Тогда при 10-7). Гораздо важнее
обеспечить стабильность частоты и периода выходного сигнала. Поэтому применение
управляемого делителя частоты тактового сигнала не ухудшает характеристик генератора. Схема
управления генератором прямоугольных импульсов с делителем частоты показана на рис. 10.40.
42
Рис. 10.40. Схема управления и делитель частоты для генератора прямоугольных импульсов.
Делитель частоты работает с кварцевым генератором с частотой 10 МГц и включает в себя три
делителя на 16 на счетчиках ИЕ7. На выход мультиплексора (сигнал Такт) проходит один из
сигналов с периодом 100 нc, 1,6 мкc, 25,6 мкc, 409,6 мкс. Длительность сигнала Такт не
превышает половины периода сигнала с частотой 10 МГц, то есть 50 нc, что обеспечивает
правильную работу счетчиков импульса и паузы (см. рис. 5.28). Выбор тактовой частоты
осуществляется 2-разрядным кодом частоты. При запрете генерации все счетчики сбрасываются в
нуль, это увеличивает точность привязки момента начала генерации к моменту подачи команды на
начало генерации.
Схема управления генератором прямоугольных импульсов, также показанная на рис. 10.40,
включает в себя два триггера ТМ2 и логический элемент 2И (ЛИ1).
Левый по рисунку триггер вырабатывает сигнал разрешения генерации Разр. В этот триггер
необходимо записать единицу для разрешения генерации или нуль для остановки генерации.
Запись в триггер входного сигнала Ген./Стоп производится передним фронтом сигнала Строб.
Правый по рисунку триггер служит для организации разового запуска генератора.
Переключение режима разового или автоматического запуска производится управляющим
сигналом Раз./-Авт. При автоматическом запуске (нуль на входе Раз./-Авт.) данный триггер не
работает, он всегда находится в нулевом состоянии и дает уровень логической единицы на своем
инверсном выходе. При разовом запуске (единица на входе Раз./-Авт.) правый триггер переходит в
рабочий режим сразу после начала генерации (положительный сигнал Разр.). После окончания
генерации первого выходного импульса на инверсном выходе генератора (инверсный выход
триггера на рис. 10.39) появляется положительный перепад, который перебрасывает правый
триггер на рис. 10.40. В результате он своим выходным сигналом сбрасывает левый триггер, что
приводит к остановке генерации (так как сигнал Разр. становится нулевым). После этого схема
снова готова к разовому запуску генерации. Временные диаграммы работы схемы в режимах
автоматического и разового запуска показаны на рис. 10.41.
Рис. 10.41. Режимы работы генератора импульсов: автоматический (а) и разовый (б).
Асинхронность (независимость) момента прихода команды на начало передачи и сигнала
задающего кварцевого генератора приводит к тому, что длительность первой паузы может
оказаться на 100 нc меньше, чем она задана кодом паузы. Но это не слишком существенно, так как
гораздо важнее длительность выходного импульса. Все последующие импульсы и паузы выдерживаются точно.
Абсолютная погрешность установки длительностей импульса Ти и паузы и Тп составляет
половину периода тактового сигнала Тт. Относительная погрешность установки этих величин
составляет соответственно 0,5/N и 0,5/М. Понятно, что при малых величинах N и М погрешность
будет большой (в пределе —логическую единицу. Тогда при даже 50%). Но при больших величинах длительностей импульса и
паузы относительная погрешность не превышает 0,5/4096, то есть 0,012%.
43
Таким образом, рассмотренный генератор может формировать импульсы длительностью от 100
нc с паузой между импульсами от 100 нc. Максимально возможная длительность импульса
составляет 216 • 212 • 100 нc = 26,84 с. Такой же может быть и пауза. Правда отношение
длительности импульса к длительности паузы (или длительности паузы к длительности импульса)
не может превышать 65536. Величина периода выходного сигнала генератора может достигать
53,69 с.
Теперь рассмотрим вторую схему.
Задача измерения частоты следования входных прямоугольных импульсов также часто
встречается как в чисто цифровых системах, так и в аналого-цифровых системах. Как уже упоминалось, существует два традиционных метода измерения частоты (рис. 10.42): один метод
предполагает измерение периода Твх путем подсчета тактовых импульсов с периодом Тт в
течение Твх и дальнейшее вычисление частоты по формуле: fвx = 1/Твх (а), а другой метод прямо
измеряет частоту fвx путем подсчета входных импульсов в течение временного окна to (б).
Относительная погрешность и того и другого метода не превышает величины 1/N, где N —логическую единицу. Тогда при
полученный в результате подсчета код. Понятно, что первый метод дает хорошую точность только
для низких частот fвx (то есть для больших Твх и соответственно больших N). Второй метод дает
хорошую точность только для больших частот fвx или в случае большого временного окна to (то
есть для больших N). В первом случае для увеличения точности необходимо увеличивать
тактовую частоту, во втором случае —логическую единицу. Тогда при увеличивать длительность временного окна.
Рис. 10.42. Методы измерения частоты: через период (а), прямой (б) и комбинированный (в).
Время измерения частоты по первому методу составляет Твх- Для второго метода оно
постоянно и равно длительности временного окна toПоэтому желательно было бы соединить достоинства обоих методов, чтобы частота fвx
измерялась бы достаточно быстро и с заданной точностью (с погрешностью, не меньшей
заданной). Это возможно при использовании комбинированного метода (рис. 10.42,в). При данном
методе импульсы тактовой частоты с периодом Т т подсчитываются в течение М полных периодов
входного сигнала. При этом количество сосчитанных импульсов N определяет точность измерения
(относительная погрешность не превышает 1/N). Значит, необходимо обеспечить, чтобы N было
достаточно большим, например, при N>100 относительная погрешность не превысит 1%, а при
N>1000 она будет меньше 0,1%. Обеспечить достаточную величину N можно простым выбором
числа М.
Недостаток данного комбинированного метода состоит в том, что измеренное значение
частоты необходимо вычислять. Так как при этом методе выполняется равенство: МТвх = NTT,
следовательно, fвx = M/(NTT). Однако при использовании компьютера или микроконтроллера
такое вычисление не представляет особого труда. Зато данный комбинированный метод позволяет
измерять частоту входного сигнала в широком диапазоне быстро и с заданной точностью.
Поэтому мы подробно рассмотрим практическую реализацию именно этого метода.
44
Рис. 10.43. Счетчики измерителя частоты входного сигнала.
В основе схемы измерителя частоты по комбинированному методу (рис. 10.43) —логическую единицу. Тогда при два 16разрядных счетчика на основе микросхем ИЕ7, одновременно работающих в режиме прямого счета. На тактовый вход одного счетчика (верхнего на схеме) подается измеряемый сигнал Изм., на
тактовый вход второго (нижнего на схеме) счетчика —логическую единицу. Тогда при тактовый сигнал образцовой частоты Такт.
Выходные коды обоих счетчиков (соответственно М и N) используются после окончания
измерения для вычисления значения частоты входного сигнала.
Работа счетчиков разрешается отрицательным сигналом -Разр. по фронту (например,
положительному) входного сигнала. После окончания измерения по такому же фронту входного
сигнала поступление сигналов Изм. и Такт запрещается. То есть счет производится в течение
целого числа периодов входного сигнала.
Выход Стоп (положительный фронт) говорит о том, что код N достиг достаточной величины (в
нашем случае —логическую единицу. Тогда при 8192), и, следовательно, можно останавливать измерение (но только по
ближайшему фронту входного сигнала). То есть код N в конце измерения будет не менее 8192, и
поэтому погрешность измерения частоты входного сигнала не превысит 1/8192 или 0,012%.
Для правильной работы схемы частота входного сигнала должна быть не более тактовой
частоты fт = 1/Тт и не менее fт/65536. Если она будет слишком малой, то наступит переполнение
нижнего счетчика (выработается сигнал переноса -Пер.2).
Если же она будет слишком большой, то наступит переполнение верхнего счетчика
(выработается сигнал переноса -Пер.1). Например, при тактовой частоте 10 МГц измеряемая
частота входного сигнала может находиться в пределах от 152,6 Гц до 10 МГц.
Полное время измерения будет изменяться в пределах от 8192Тт до (8192Тт + 2Твх). Один
период ТВх может прибавляться к времени измерения из-за того, что после разрешения измерения
счет начинается не сразу, а только с приходом фронта входного сигнала. Второй период ТВх может
прибавляться за счет того, что счет заканчивается не сразу после достижения кодом N величины
8192, а только с приходом нужного (положительного) фронта входного сигнала. Максимальное
время измерения в любом случае не превышает 65536Тт для всех измеряемых частот.
45
Рис. 10.44. Делитель частоты и схема управления для измерителя частоты входного сигнала.
Для увеличения диапазона измеряемых частот можно применить предварительный
управляемый делитель частоты (рис. 10.44). Он обеспечивает выбор период тактового сигнала из
ряда: 100 нс, 400 нс, 1,6 мкс, 6,4 мкс и 25,6 мкс с помощью кода такта. В результате применения
этого делителя при минимальной тактовой частоте возможно измерение частоты входного сигнала
до 0,6 Гц. Естественно, переход на каждый следующий диапазон измеряемых частот может
увеличить время измерения в 4 раза, но точность измерения в любом случае останется прежней.
Схема управления измерителем частоты, также показанная на рис. 5.33, включает в себя
цепочку из четырех последовательно срабатывающих триггеров (ТМ2). Перед началом измерения
все эти триггеры сбрасываются в нуль сигналом -Сброс.
Первый триггер перебрасывается в единицу по сигналу начала измерения Старт
(положительный фронт). При этом разрешается прохождение подсчитываемых импульсов Изм. и
Такт на вход счетчиков рис. 10.43. Одновременно разрешается работа второго триггера.
Второй триггер перебрасывается в единицу по положительному фронту входного сигнала. Тем
самым он с помощью сигнала со своего инверсного выхода разрешает работу счетчиков (сигнал Разр.). Одновременно разрешается работа третьего триггера.
Третий триггер перебрасывается в единицу по сигналу Стоп (то есть при достижении кодом N
числа 8192). Он разрешает работу четвертого триггера.
Наконец, четвертый триггер перебрасывается по положительному фронту входного сигнала и
сигналом со своего инверсного выхода сбрасывает первый триггер. Поступление сигналов Изм. и
Такт прекращается. Выходной сигнал четвертого триггера служит флагом готовности выходных
кодов N и М, которые необходимо прочитать для дальнейшего вычисления частоты. Перед новым
измерением надо подать сигнал Сброс.
Кроме четырех управляющих триггеров в схему управления введены еще два триггера (справа
на рисунке), выходные сигналы которых служат флагами переполнения и показывают после
окончания измерения, правильно ли сработал измеритель частоты. Перед началом измерения оба
эти триггера сбрасываются по сигналу Сброс. Если частота входного сигнала в нужных пределах,
то оба триггера останутся в нуле. Если частота входного сигнала очень большая, то сработает
верхний по рисунку триггер по входному сигналу переноса Пер.1 (см. рис. 10.43) и выдаст сигнал
Увел., говорящий о том, что надо поднять частоту тактового сигнала (если это возможно). Если же
частота входного сигнала слишком мала, то сработает нижний по рисунку триггер по входному
сигналу переноса Пер.2 (см. рис. 10.43) и выдаст сигнал Умен., говорящий о том, что надо
уменьшить частоту тактового сигнала (если возможно).
10.6.3. Применение синхронных счетчиков.
Управляемый делитель частоты с коэффициентом пересчета, задаваемым входным кодом,
реализуется на синхронных счетчиках довольно просто (рис. 10.45). Сигнал переноса -CR старшего счетчика подается на вход разрешения записи -EWR. Счетчики работают в режиме
обратного счета (на вход U/D подан сигнал логического нуля).
46
Рис. 10.45. Управляемый делитель частоты.
При достижении всеми счетчиками нулевого кода вырабатывается сигнал переноса -CR,
переводящий счетчики в режим параллельной записи входного управляющего кода. Следующим
положительным фронтом тактового сигнала С входной код записывается в счетчики. Это
приводит к новому циклу счета от входного кода до нуля.
Коэффициент пересчета делителя частоты равен (N+1), где N —логическую единицу. Тогда при входной код, который может
принимать значения от 1 до (2n - 1), где n —логическую единицу. Тогда при количество разрядов кода. Условие правильной
работы делителя частоты следующее: период тактового сигна4ла не должен быть меньше полной
задержки переноса. Длительность выходного сигнала делителя частоты равна периоду тактовой
частоты.
Следующая схема —логическую единицу. Тогда при формирователь временного интервала заданной длительности (рис. 10.46)
демонстрирует, как надо использовать выходной сигнал переноса синхронных счетчиков при
необходимости организации разового (не периодического) цикла работы.
Рис. 10.46. Формирователь интервала заданной длительности.
Работа формирователя начинается по короткому отрицательному импульсу -Старт,
перебрасывающему управляющий триггер в единицу и начинающему выходной сигнал.
Положительный сигнал с выхода триггера переводит 8-разрядный синхронный счетчик из режима
параллельной записи входного кода в режим счета (по входу -EWR). Счет на уменьшение идет по
положительным фронтам тактового сигнала с генератора. Когда счетчик досчитает до нуля,
следующим положительным фронтом тактового сигнала нулевой сигнал переноса -CR будет
записан в триггер. Тем самым будет завершен выходной сигнал, а счетчик будет переведен в
режим параллельной записи. Следующий цикл работы формирователя начнется по сигналу -Старт.
В данном случае триггер, обрабатывающий сигнал переноса работает синхронно со
счетчиками, так как тактируется тем же (положительным) фронтом единого тактового сигнала.
Длительность выходного сигнала будет находиться в интервале от NT до (N+1)T, где Т —логическую единицу. Тогда при период
тактового сигнала с генератора, а N —логическую единицу. Тогда при входной код от 0 до 255.
Посмотрим, как на синхронных счетчиках можно построить генератор прямоугольных
импульсов с регулируемыми длительностью импульса и длительностью паузы, который был рассмотрен в предыдущем разделе (см. рис. 10.39 и 10.40). Будем ориентироваться на достижение
максимального быстродействия, то есть на максимально возможную тактовую частоту.
Схема управления будет мало отличаться от схемы рис. 10.40, поэтому мы остановимся только
на схеме счетчиков импульса и паузы. Выберем разрядность обоих этих счетчиков равной 16.
Тогда схема счетчиков импульса и паузы (рис. 10.47) будет включать в себя восемь микросхем
счетчиков ИЕ17 и выходной триггер, а также логические элементы 4ИЛИ-НЕ для уменьшения
задержек переноса. В данном случае очень удобно брать JK-триггер, так как он имеет два
информационных входа и тактовый вход.
47
Рис. 10.47. Синхронные счетчики импульса и паузы для генератора прямоугольных импульсов.
Триггер тактируется отрицательным фронтом сигнала С, а счетчики —логическую единицу. Тогда при положительным
фронтом, поэтому для обеспечения синхронной работы всей схемы по одному фронту тактового
сигнала сигнал на вход С триггера подается через инвертор.
Суть работы схемы остается прежней: 16-разрядные счетчики импульса и паузы работают по
очереди, что определяется управляющими сигналами с выходов триггера (прямого и инверсного).
Счетчики считают на уменьшение (в режиме инверсного счета) от кода, параллельно записанного
в них, до нуля.
До начала работы (сигнал Разр. нулевой) оба счетчика находятся в состоянии параллельной
записи и записывают в себя код импульса и паузы. После прихода положительного сигнала разрешения генерации Разр. начинает счет верхний на схеме счетчик (счетчик паузы).
Когда счетчик паузы досчитывает до нуля, его сигнал переноса записывается в триггер по
входу J и перебрасывает выход триггера в единицу, что переводит счетчик паузы из состояния
счета в состояние параллельной записи и запрещает поступления сигнала на вход J. Одновременно
переходит в состояние счета нижний на схеме счетчик (счетчик импульса), который, в свою
очередь досчитав до нуля, перебрасывает триггер в нуль по входу К. Этот процесс периодически
повторяется, пока разрешена генерация (то есть сигнал Разр. положительный).
Сформулируем условия правильной работы схемы.
Во-первых, за период тактового сигнала должен успеть полностью сработать 16-разрядный
счетчик, выполненный на четырех микросхемах синхронных счетчиков. То есть сигнал на входы ECR и -ЕСТ последнего счетчика должны успеть придти до следующего фронта тактового
сигнала.
Во-вторых, за период тактового сигнала должна успеть сработать цепочка из инвертора (ЛН1),
триггера (ТВ11) и элемента 2И (ЛИ1). Это более мягкое требование, чем предыдущее, если,
конечно, взять перечисленные элементы из быстродействующих серий КР531 или КР1531.
Рассмотренный переход на синхронные счетчики позволяет повысить максимальную частоту
тактового сигнала генератора прямоугольных импульсов по меньшей мере вдвое (до 20 МГц) по
сравнению со схемой на синхронных счетчиках с асинхронным переносом.
Наконец, последнее применение синхронных счетчиков, которое мы рассмотрим, связано с их
возможностью параллельной записи по фронту тактового сигнала. То есть в режиме параллельной
записи счетчик представляет собой регистр, срабатывающий по фронту тактового сигнала.
Благодаря этой особенности, при объединении нескольких счетчиков их выходные коды можно
последовательно считывать с выходов последнего в цепочке, старшего счетчика (рис. 10.48).
Счетчики в данном случае образуют своеобразный многоразрядный сдвиговый регистр.
Режим работы схемы определяется управляющим сигналом Счет/Сдвиг. При высоком уровне
этого сигнала счетчики находятся в режиме прямого счета по фронту сигнала Такт. При низком
48
уровне сигнала счетчики переходят в режим последовательного счета 12-разрядного счетчика
через четыре разряда правого на схеме счетчика. Первым читается состояние старшего счетчика,
последним —логическую единицу. Тогда при младшего. Сдвиг выходного кода происходит по положительному фронту тактового
сигнала. После трех импульсов тактового сигнала во все три счетчика оказывается записанным
нулевой код, то есть схема готова к режиму прямого счета.
Рис. 10.48. Последовательное чтение выходного кода многокаскадного счетчика.
Рис. 10.49. Последовательная запись в счетчики исходного состояния.
И точно такая же последовательная перезапись информации из счетчика в счетчик позволяет с
помощью 4-разрядных входных кодов записать исходное состояние нескольких последовательно
соединенных счетчиков (рис. 10.49).
Перед началом работы схема переводится в состояние параллельной записи нулевым уровнем
сигнала Счет/запись. При этом 4-разрядные коды, которые надо записать во все счетчики, по
очереди подаются на вход первого (младшего) счетчика и сдвигаются по направлению к старшему
счетчику по положительному фронту тактового сигнала С. Для записи всех трех счетчиков
необходимо подать три тактовых импульса подряд. Причем первым надо записывать код,
предназначенный для старшего (правого на схеме) счетчика, а последним —логическую единицу. Тогда при код,
предназначенный для младшего (левого на схеме) счетчика.
Распределители импульсов.
На основе счетчиков строятся распределители импульсов, которые последовательно
формируют импульс на одном из п выходов устройства с приходом очередного входного
импульса.
Функциональная схема шестиканального распределителя приведена на рис. 10.50 и состоит из
трехразрядного счетчика и дешифратора. На три информационных входа дешифратора поступают
со счетчика разряды двоичного кода с весами 4, 2, 1.
Рис. 10.50. Распределитель импульсов трехразрядный (8 каналов)
49
ЛИНЕЙНЫЕ СТАБИЛИЗАТОРЫ
НАПРЯЖЕНИЯ
5.1. Общие сведения
Для питания любой активной электронной схемы необходимо иметь один
или несколько источников стабильного напряжения постоянного тока. Простые нерегулируемые источники питания, выполненные по схеме
«трансформатор — неуправляемый выпрямитель — сглаживающий фильтр», во
многих случаях оказываются непригодными, так как их выходное напряжение
зависит от тока нагрузки и напряжения в сети. Однако с помощью все той же
отрицательной обратной связи, легко построить источник стабильного питания, используя для компенсации влияния нагрузки и нестабильности сети регулирующий сигнал, полученный в результате сравнения выходного напряжения
источника с некоторым постоянным эталонным (опорным) напряжением. Такие стабилизированные источники питания относятся к классу компенсационных. Они достаточно универсальны и могут быть изготовлены в виде интегральных микросхем стабилизаторов напряжения.
Как правило, регулирующим элементом ИМС стабилизаторов напряжения
является биполярный либо полевой транзистор. Если этот транзистор все время
работает в активном режиме, то схему называют линейным (непрерывным) стабилизатором напряжения (JICH), а если регулирующий транзистор работает в
ключевом режиме — импульсным (ИСН).
5.2. Схемотехника линейных
стабилизаторов напряжения
Микросхемы ЛСН включают помимо силовых регуляторов более или менее
сложную маломощную схему управления. Принципиальная трудность создания
интегральных стабилизаторов заключается в том, что силовые транзисторы рассеивают значительную мощность, вызывая локальный нагрев кристалла с существенным градиентом температур. Это резко ухудшает стабильность параметров схемы управления, в состав которой входит источник опорного
напряжения, дифференциальный усилитель ошибки, цепи защиты от перегрузок по току и короткого замыкания нагрузки, от перегрева кристалла и других
аварийных или нештатных режимов.
Монолитный линейный интегральный стабилизатор напряжения был впервые разработан Р. Видларом в 1967 году. Эта микросхема (mA723) содержит) содержит
регу-
лирующий транзистор, включенный последовательно между источником нестабилизированного напряжения и нагрузкой, усилитель ошибки и
термокомпенсированный источник опорного напряжения. Схема оказалась настолько удачной, что в начале 70-х годов выпуск ее доходил до 2 млн штук в месяц! По массовости применения ЛСН стоят на втором месте после операционных усилителей.
5.2.1. Базовая схема линейного
стабилизатора напряжения
В упрощенном виде схема линейного стабилизатора напряжения приведена на Рис. 5.1.
Схема состоит из операционного усилителя в
неинвертирующем включении с отрицательной
обратной связью по напряжению, источника
опорного напряжения VREF и регулирующего
транзистора VT1, включенного последовательно с
нагрузкой.
Выходное напряжение VOUT контролируется с
Рис. 5.1. Базовая схема
помощью цепи отрицательной обратной связи,
линейного стабилизатора
выполненной на резистивном делителе R1R2- ОУ
напряжения
играет роль усилителя ошибки, в качестве которой
здесь выступает разность между опорным напряжением КRЕF задаваемым источником опорного напряжения (ИОН), и выходным напряжением делителя R1R2
Схема работает следующим образом. Пусть по тем или иным причинам (например, из-за уменьшения сопротивления нагрузки или входного нерегулируемого напряжения) выходное напряжение стабилизатора ^оит уменьшилось.
При этом на входе ОУ появится ошибка AV> 0. Выходное напряжение усилителя возрастет, что приведет к увеличению тока базы, а, следовательно, и тока
эмиттера регулирующего транзистора до значения, при котором выходное напряжение возрастет практически до первоначального уровня.
В случае идеального операционного усилителя установившееся значение
ошибки, совпадающее с дифференциальным входным напряжением ОУ, близко к нулю. Отсюда следует, что
Питание операционного усилителя осуществляется от входного нерегулируемого однополярного напряжения, в данном случае положительного
(при регулирующем транзисторе р-п-р-типа. все напряжения в схеме должны
быть отрицательными). Это накладывает ограничения на допустимый диапазон входных и выходных сигналов, которые в этих условиях должны быть
только положительными.
Для схем источников питания такое ограничение не играет роли, поэтому от
использования напряжения другой полярности для питания ОУ можно отказаться. Еще одно преимущество подобной схемы состоит в том, что напряжение
питания операционного усилителя можно удвоить, не опасаясь превысить его
предельно допустимые параметры. Таким образом, стандартные операционные
усилители можно использовать в схемах стабилизаторов с входным напряжением до 3) содержит0 В. Хотя операционный усилитель питается от нестабилизированного
входного напряжения VIN, благодаря глубокой отрицательной обратной связи
влияние этого фактора на стабильность выходного напряжения невелико.
5.2.2. Интегральный линейный
стабилизатор напряжения
Представленная на Рис. 5.1 схема стабилизатора может быть выполнена в
виде интегральной схемы. Такие схемы выпускаются промышленностью (например, серии mA78xx, LM3) содержит10, 142Енхх, TPS77xxx и др.) на несколько
фиксированных значений стандартных выходных напряжений: 1.2...27 В. В
таком исполнении схема может иметь только три внешних вывода: вход, выход
и общий вывод (Рис. 5.2).
Рис. 5.2. Типовая упрощенная схема интегрального
стабилизатора напряжения
Характерной особенностью этого стабилизатора является включение регулирующего n-p-n-транзистора по схеме с общим коллектором (эмиттерным повторителем).
В зарубежной литературе такое устройство часто называют п-р-п-стабилизатором. Требования, предъявляемые к усилителю ошибки, не очень высоки и он,
как правило, выполняется по простейшей схеме дифференциального усилителя. Опорное напряжение может быть получено самыми различными способами. На Рис. 5.2 в качестве источника опорного напряжения символически показан стабилитрон VD\. Реально в низковольтных стабилизаторах используется
так называемый ИОН на ширине запрещенной зоны. Впервые его применил Р.
Видлар в одном из первых трехвыводных стабилизаторов LM109 [5.1]. За счет
отрицательной обратной связи, образуемой делителем напряжения R1 — R2, выходное напряжение стабилизатора установится равным
Vоuт = V REF (1+R 2 /R1).
219
Интегральный стабилизатор напряжения имеет встроенную схему ограничения выходного тока, состоящую в данном случае из резистора R3) содержит и транзистора VT2. Если падение напряжения на R3 превысит величину, равную приближенно 0.6 В, транзистор VТ2 откроется и предотвратит дальнейшее увеличение
базового тока транзистора VT1 поэтому величина выходного тока стабилизатора ограничена уровнем
IOUT_MAX ~ 0.6В/R3) содержит.
При этом максимальная мощность, рассеиваемая на выходном регулирующем транзисторе VТ1 будет равна
Pт = IOUT_МАХ(VIN - Vоuт).
(5.1)
В случае короткого замыкания нагрузки (режим КЗ) эта мощность может
значительно превысить предельную мощность для регулирующего транзистора,
т. к. при этом выходное напряжение упадет от номинальной величины до нуля.
Чтобы снизить мощность, рассеиваемую транзистором в режиме КЗ, одновременно с уменьшением выходного напряжения (точнее, с увеличением разности
потенциалов «вход—выход») нужно уменьшать уровень ограничения тока. При
таком способе ограничения тока выходная характеристика стабилизатора имеет
неустойчивый участок (Z-характеристика). Она изображена на Рис. 5.3) содержит.
С увеличением напряжения на регулирующем транзисторе (например, из-за нестабильности входного напряжения) происходит быстрый рост мощности, рассеиваемой на его
коллекторном переходе.
Это обусловлено тем, что соответственно
возрастает разность напряжений (VIN — VоиT),
которая входит в выражение для мощности
Рис. 5.3. Выходная характеристика
стабилизатора напряжения с
(5.1). Защита выходного транзистора от перезащитой от короткого замыкания
грева в этом случае достигается тем, что уронагрузки (Z-характеристика)характеристика)
вень ограничения тока IOUT_MAX делают зависимым от разности напряжений (VIN— VОUT). В
схеме на Рис. 5.2 для этой цели служат резистор R5 и стабилитрон VD2.
Если разность напряжений (VIN — VОUT) остается меньшей, чем напряжение
стабилизации стабилитрона VD2, через резистор R5 ток не течет. В этом случае
уровень ограничения тока остается равным 0.6 В/R3) содержит. Если же эта разность превысит величину напряжения стабилизации стабилитрона, замыкается цепь делителя напряжения на резисторах R5, R4 и к эмиттерному переходу транзистора
VТ2 прикладывается дополнительное положительное напряжение. В результате
транзистор VТ2 будет открываться при меньших токах через регулирующий
транзистор VТ1.
В последних моделях ИМС стабилизаторов напряжения все шире применяется тепловая защита от перегрузок. Так, например, стабилизатор ADP3) содержит3) содержит03) содержит
снабжен схемой, которая резко снижает выходной ток при нагреве кристалла до
температуры 165°С.
Конденсатор Ск осуществляет необходимую частотную коррекцию схемы. В
качестве дополнительной меры по предотвращению самовозбуждения следует
включать на входе и выходе стабилизаторов конденсаторы емкостью
0.1... 10 мкФ. В последнее время на рынке появились стабилизаторы, так назы-
ваемые Cap-free, которые не требуют подключения внешних конденсаторов параллельно выходу. Примером может служить REG 103) содержит фирмы Burr-Brown.
Кроме стабилизаторов с фиксированным выходным напряжением выпускаются также регулируемые стабилизаторы напряжения (например, 142ЕНЗ или
1168ЕН1). В схемах таких стабилизаторов отсутствует делитель напряжения
R1R2, а база транзистора VT4 подключена к выводу микросхемы для соединения
с внешним делителем напряжения. Значительная часть ИМС регулируемых
стабилизаторов (mA78G, 142EH4 и др.) имеет, как минимум, 4 вывода,
поскольку ток собственного потребления микросхемы составляет единицы
миллиампер и зависит от нагрузки. Поэтому его нельзя замкнуть через цепь
внешнего делителя напряжения, поскольку это вызовет изменение
напряжения на делителе при изменении тока нагрузки. Усовершенствование
схемотехники ИМС стабилизаторов позволило снизить этот ток до десятков
микроампер и избавиться от четвертого вывода (LM3) содержит17, LT1085 и др.).
В то же время наличие специального вывода для подключения цепи обратной связи по напряжению позволяет обеспечить высокую стабильность напряжения на удаленной нагрузке (сделать его независимым от падения напряжения на соединительных проводах). Поэтому наряду с трехвыводными
выпускаются ИМС стабилизаторов с числом выводов больше 3) содержит (например,
ADP3) содержит3) содержит3) содержит1, TPS70151 и др.), которые помимо входов обратной связи имеют также дополнительные входы для управления цепями защиты от КЗ, от перегрузки
по току и других подобных режимов.
5.2.3. Стабилизация отрицательных напряжений
Вышеописанные стабилизаторы предназначены в основном для стабилизации положительных напряжений относительно общей точки (земли) схемы.
Однако те же самые схемы можно применять и для стабилизации отрицательных напряжений, если использовать гальванически изолированное от общей
точки входное напряжение. В этом случае выходной вывод стабилизатора соединяется с общей точкой, а минусовым выводом схемы является точка соединения минусового вывода источника входного напряжения и общей точки стабилизатора (вывод 3) содержит на хеме Рис. 5.2).
Значительно более удобным оказывается применение специальных схем
стабилизаторов для отрицательной полярности напряжения, например, JIA79XX
или 1168ЕНхх. Для случаев, когда требуется два симметричных относительно
общей точки стабилизированных напряжения (например, ±15 В для питания
операционных усилителей) выпускаются ИМС, содержащие два
стабилизатора— на положительное и отрицательное напряжение, например
NE5554 (отечественный аналог — КР142ЕН6). Упрощенная схема внутренней
структуры такого стабилизатора приведена на Рис. 5.4а, а типовая схема его
включения — на Рис. 5.45.
Канал стабилизации отрицательного напряжения является независимым.
Дифференциальный усилитель ДУ2 управляет регулирующим транзистором VT2
так, чтобы выполнялось соотношение
Рис. 5.4. Стабилизатор двух разнополярных напряжений,
симметричных относительно общей точки: а —
принципиальная схема, б — типовая схема включения
Усилитель ДУ1 с помощью транзистора VT1 стремится поддержать
потенциал точки соединения резисторов R2 и R4 нулевым, что при выполнении
условия R2 = R4 обеспечивает равенство положительного и отрицательного
выходных напряжений. Подключая дополнительные резисторы между
соответствующими выходами микросхемы, можно независимо подстроить
баланс выходных напряжений и их величину.
5.2.4. Уменьшение потерь в стабилизаторах
Минимальное падение напряжения на интегральном стабилизаторе, необходимое для его нормальной работы, обычно составляет около 3) содержит В. Однако для
схем, питающихся от химических источников тока (гальванических элементов
и аккумуляторов), это очень много. При использовании схемного решения, показанного на Рис. 5.2, эта величина принципиально не может быть снижена.
Как следует из этой схемы, источник тока I1 должен обеспечивать ток коллектора транзистора дифференциального каскада VT4 и базовый ток выходного составного транзистора VT1, VT1 Для нормальной работы схемы источника тока
падение напряжения на нем должно составлять не менее 1.5 В. Остальная часть
общего падения напряжения приходится на составной регулирующий транзистор; эта величина также составляет около 1.5 В. Заметим, что величина падения напряжения на стабилизаторе определяет и его КПД — чем оно больше,
тем меньше КПД, особенно при малых выходных напряжениях, обычных для
питания интегральных схем (3) содержит...15 В).
Одна из основных причин столь большого падения напряжения на стабилизаторе заключается в том, что в рассматриваемом случае регулирующий транзистор включен по схеме с общим коллектором. Существенного снижения минимально допустимого напряжения можно достичь включением регулирующего
транзистора по схеме с общим эмиттером. Для стабилизатора положительного
напряжения это означает применение p-n-p транзистора в качестве выходного.
В этом случае коллекторный ток транзистора дифференциального каскада мо-
жет непосредственно использоваться в качестве базового тока выходного транзистора; при этом отпадает необходимость в источнике тока I1. Схема такого
стабилизатора приведена на Рис. 5.5.
Поскольку составной транзистор выходного каскада включен здесь по схеме с общим эмиттером, то приходится учитывать дополнительное инвертирование фазы управляющего сигнала. Поэтому сигнал управления регулирующим
транзистором снимается в усилителе ошибки не с транзистора VT4, как в предыдущей схеме, а с транзистора VT3) содержит. Минимальное падение напряжения на стабилизаторе равно напряжению насыщения коллектор—эмиттер транзистора
VT1 и не превышает 1 В. Для стабилизации отрицательных напряжений все
транзисторы этой схемы должны быть заменены транзисторами с противоположным типом проводимости. По подобной схеме построены, например, трехвыводные стабилизаторы напряжения малой мощности типа 1170ЕНхх, работающие при минимальном напряжении между входом и выходом 0.6 В. Они
выпускаются в корпусах ТО-92 на фиксированные выходные напряжения 5, 6,
8, 9, 12 В при токе нагрузки до 100 мА и собственном потреблении не более
1.2 мА. Такие устройства в зарубежной литературе называют стабилизаторами
типа LDO (low drop output — выход с малым перепадом). Мы в дальнейшем будем называть такие устройства МПН-стабилизаторами (стабилизаторами с малым падением напряжения).
Дальнейшее уменьшение минимально допустимого падения напряжения на
стабилизаторе может быть достигнуто применением в качестве силового регулятора МОП-транзистора, включенного по схеме с общим истоком.
Упрощенная схема стабилизатора с регулирующим МОП-транзистором
приведена на Рис. 5.6. Для стабилизации положительных напряжений используется транзистор с p-каналом, работающий в режиме обогащения. Схема
работает следующим образом.
Рис. 5.5. Интегральный стабилизатор с малым
падением напряжения вход—выход
Рис. 5.6. Стабилизатор напряжения с
регулирующим МОП-характеристика)транзистором
При уменьшении сопротивления нагрузки выходное напряжение также
уменьшается, и на входе усилителя появится ошибка AV< 0. Выходное напряжение усилителя будет снижаться, уменьшая напряжение на затворе регулирующего МОП-транзистора. Поскольку это p-канальный транзистор, то уменьшение напряжения на его затворе вызовет увеличение тока стока и выходное
напряжение увеличится до прежнего значения.
Большое достоинство стабилизаторов с регулирующим МОП-транзистором
— независимость тока потребления (тока общего вывода) от тока нагрузки. Это
связано с тем, что МОП-транзистор управляется напряжением, а ток его затво-
pa (а следовательно, и выходной ток усилителя) совершенно ничтожен по сравнению с током нагрузки. На Рис. 5.7 представлены примерные зависимости тока собственного потребления Is от тока нагрузки IL стабилизаторов с
регулирующими транзисторами различного типа.
Другое достоинство — падение напряжения на регулирующем элементе может
быть снижено до очень малых величин,
недостижимых для биполярных транзисторов. Например, двухканальный стабилизатор напряжения МАХ8865 имеет
минимально допустимое падение напряжения 55 мВ при токе нагрузки 50 мА и
Рис. 5.7. Сравнительные графики зависи-характеристика)
всего 1 мВ при токе нагрузки 1 мА.
мостей тока потребления стабилизаторов с ре-характеристика)
гулирующими транзисторами различного типа
Расширение номенклатуры устройств
с батарейным питанием требует дальнейшего повышения их экономичности. Многие узлы измерительных приборов,
устройств связи и др. должны обеспечиваться питанием лишь время от времени. В этом случае на нерабочих интервалах напряжение их питания следует
снижать до нуля. Для этого некоторые модели ИМС стабилизаторов снабжены
выводами Shutdown (отключение), подача активных логических уровней, на которые вызывает принудительное запирание регулирующего транзистора. Это,
например, семейство LT176x фирмы Linear Technology с номинальными токами
0.L..3) содержит А и минимальным напряжением «вход — выход» 0.3) содержит В, а также семейство
ADP3) содержит3) содержит3) содержитx фирмы Analog Devices с минимальным напряжением «вход — выход»
0.17 В при токе 0.2 А.
5.3. Устойчивость линейных стабилизаторов
напряжения
5.3.1. Устойчивость n-р-р-р-n-р-стабилизаторов
Обычный n-p-n-стабилизатор может быть представлен блок-схемой на
Рис. 5.8. Показанный на блок-схеме усилитель ошибки будем считать безынерционным.
Рис. 5.8. Блок-характеристика)схема n-характеристика)p-характеристика)n-характеристика)стабилизатора
Рис. 5.9. Схема замещения n-характеристика)p-характеристика)n-характеристика)стабилизатора
Схема замещения стабилизатора без корректирующего конденсатора приведена на Рис. 5.9. Внутри области, ограниченной штриховой линией, изображена
эквивалентная схема регулирующего транзистора, включенного по схеме ОК.
Усилитель преобразует ошибку регулирования DVв ток базы регулирующего
транзистора. Представим передаточную функцию разомкнутого контура регулирования системы в виде
Полюс S1 этой передаточной функции — доминирующий. Он определяется
емкостью корректирующего конденсатора усилителя Ск. Полюса s2 и s3) содержит начинают влиять на частотную характеристику стабилизатора на значительно более
высоких ч