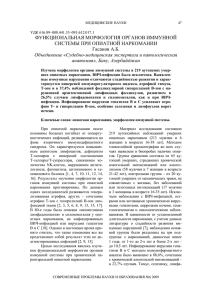
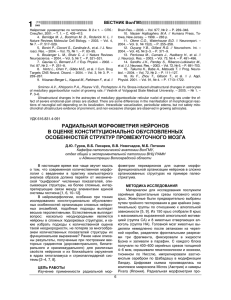
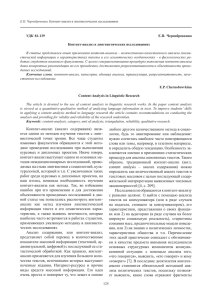
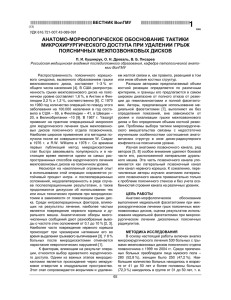
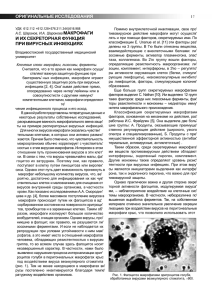
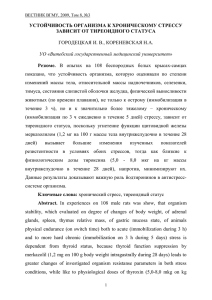
International Conference on Magnetics, Machines & Drives (AICERA-2014 iCMMD) Adaptive Linearization of Hysteresis for Enhanced Positional Accuracy of Robotic Arm 1 Saikat Kumar Shome, 2Mangal Prakash 1,4 Electronics & Instrumentation Group, CSIR-CMERI Durgapur, India 1 saikatkshome@cmeri.res.in 2 mangalprakash21@gmail.com Abstract—Precision control of multi-axis piezo actuated micro / nanopositioning stages suffers not only from the inherent nonlinearities but also from parametric variations and uncertainties. In order to effectively implement any real-time control theory to mitigate the effects of nonlinearity, an adaptive mechanism to update the control system is a prerequisite. This paper investigates the effects of hysteretic nonlinearity in a second order Dahl model based piezoelectric manipulator. The plant performance is known to improve with injection of a suitable dose of noise called “dither”. The concept of dither based control is interwoven with the conventional PID controller to introduce a novel adaptive dither control strategy. A double axis piezo stage is considered for controller design and validation. The controller performance is ascertained using three specific tests- a) Tracking Error Test, b) Multi-frequency, multi-amplitude tracking test and c) Two-axis Circular Contour Tracking Test. Results show an enhanced positioning accuracy of the manipulator in the presence of proposed control scheme than without it. The proposed control transpires as an effective control to improve tracking accuracy and resist external disturbances. Keywords—hysteresis; piezoelectric actuator; adaptive control; dither; Stochastic Resonance (SR); auto-tuning; nanopositioning. I. INTRODUCTION For past few decades, piezoelectric type micro/nano positioners have revolutionized nano scale trajectory tracking in industrial applications like Scanning Probe Microscopy [1], semiconductor fabrication [2], micro robotics [3] and adaptive optics[4-5]amongst many others. The inherent high resolution of displacement, high stiffness, large blocking force and quick response characteristics have enabled piezo based manipulators supplant the traditional positioning systems. However, the piezo-driven stages have always been plagued with hysteresis which manifests itself as the major obstruction in achieving the desired positioning accuracy. Hysteresis introduces severe open loop positioning error which may even be as large as 15% of the entire travel range. Hysteresis can also destabilize the closed loop operation of piezoelectric actuator and limits its applicability [6-7]. To counter these shortfalls, extensive research has been done on piezoelectric ceramic hysteretic modeling and its control. The main idea behind every modeling has been the 978-1-4799-5202-1/14/$31.00 ©2014 IEEE 3 Sourav Pradhan, 4Arpita Mukherjee 2,3 Dept. of Electrical Engg., National Institute of Technology Durgapur, India 3 souravpradhan.sp@gmail.com 4 ee.arpita@gmail.com development of a mathematical formulation that can faithfully and effectively capture the characteristics of hysteresis under widely varying operating conditions. In fact, the level of precision obtainable from a piezo actuated stage is heavily dependent on the accuracy with which it is modeled. Various modeling frameworks have been designed over years to successfully encapsulate the dynamic characteristics of hysteresis. Some standout frameworks include PrandtlIshlinskii model, Duhem model, Preisach model, Maxwell model, Dahl model, Bouc Wen model and other memory based frameworks [8-13]. Most of these models have a convoluted structure to account for the multiple-loop behavior of hysteresis. A charge-driven circuit has been proposed in [14] to get around the complications involved in modeling hysteresis, but at the expense of costly instruments, reduction in system responsiveness and the amplification of measurement noise. The design of effective control systems is equally important in order to achieve the desired level of trajectory tracking of time varying signals. The control spectrum of piezoelectric actuators can be broadly divided into two categories: feedforward and feedback control. Feedforward control structures essentially rely upon the inverse hysteresis models to generate a compensated voltage and hence, reduce hysteresis [15-16]. Such a control is known to operate with near perfection provided no uncertainties and external disturbances exist in the system. But practical applications are inadvertently dynamic in nature and the possibility of disturbances cannot be rejected completely. Feedback control covers these drawbacks of the feedforward controller and provides improved levels of positioning [10], [15]. Yet, no methodic stability and robustness are given for the feedback systems [17]. The general perception of noise as a foe in modern systems and applications has undergone a radical transformation in recent decades. In fact, noise has been used as a powerful tool in the fields of control systems and signal processing to realize better levels of performance. Recent studies have investigated noise induced performance boost in the domain of piezoelectric actuators [18-21]. The noise which is used to corrupt the otherwise pure system for augmenting the system capabilities is generally called dither. Dithering is presently International Conference on Magnetics, Machines & Drives (AICERA-2014 iCMMD) creating a buzz in physics, chemistry, engineering, bio sciences and several others fields. In the context of piezoelectric actuators, it is found to be inducing another wellknown phenomenon called Stochastic Resonance (SR). As a consequence of this actuality, the system tracking error undergoes a minimum with a variation of injected noise intensity. The presence of parameter uncertainties and external disturbances are arguably the greatest challenges in implementing any real-time control scheme. This elucidates the need of adaptive and robust control techniques when highperformance applications are demanded. Researchers have devised adaptive controllers to meet this end for nanopositioning applications via piezo stages. Most of these schemes employ a representative hysteresis model [22-23]. Asymptotic robust schemes like Sliding mode control [24] have enjoyed considerable success but their practicality is limited by chattering phenomenon. The control system design assumes a greater challenge when the system is subjected to other sources of uncertainties like cross-coupling effect in piezo stages. This article employs a second order Dahl model to envisage the hysteresis behavior of a dual axis parallel piezoelectric nanopositioning stage. As a general control strategy, feedforward topology realized by inverse Dahl model is deployed here. Dithering in tandem with SR is used to support the effort in developing a dither based control scheme. The benefits of adaptive control are incorporated in the system by adaptively tuning the dither amplitude with the help of a classical PID controller. Results indicate effective dual axis tracking and robustness to sudden variations in input. The computationally simple algorithm and the ease of implementation advocate the potential of the proposed novel control structure. II. DYNAMIC MODEL OF THE SYSTEM The piezoelectric actuator used for experimentations is a P-841 series translator manufactured by Physik Instrumente which can provide sub nanometer resolution as well as sub millisecond response. It is equipped with highly reliable multilayer piezo ceramic stacks protected by a non-magnetic stainless steel case with internal spring preload. P-841.40 preloaded piezoactuator with integrated feedback strain gauge sensor has been used. The strain gauge sensor provides high resolution for closed loop operation. The absence of polymer insulation and the high Curie temperature ensure optimal ultra-high vacuum compatibility, i.e., minimum outgassing. The allowable operating temperature for this setup lies within -20° to +80° C. A data acquisition system (cRIO-9073) is used to interface the equipment with LABVIEW real-time workshop. FPGA mode of cRIO-9073 is used which consists of an 8-slot integrated 266 MHz real-time controller. cRIO is equipped with NI-9205 32 channel, + 10 V, 250 kS/s, 16-bit analog input module, NI 9219 4 channel-channel isolated, 24bit, + 60 V, 100 kS/s, universal analog input module and NI 9263 4 channel, 16 bit, + 10 V, 100 kS/s/ch, analog output Fig. 1: Experimental Setup of the piezoelectric actuator module. A schematic representation of the experimental setup is shown in Fig. 1. The hysteretic modeling of piezoelectric actuators presents two major challenges: a) the non-local memory of the hysteresis loops and b) the asymmetry of hysteresis loops between ascending and descending paths. A popular hysteretic model that captures hysteretic characteristics appreciably well and describes the dynamics of piezo-positioning mechanism is second order Dahl model. It has been known to portray hysteresis loops with near exactness and has lesser number of parameters compared to the higher order Dahl models [25]. The second order Dahl model in the presence of hysteresis is analyzed below. For two dimensional motion tracking (along x and y axes), two separate and decoupled micromanipulators can be assumed. The mathematical treatment of manipulator along x axis is described here. A similar approach is valid for the analysis of micro-manipulator along y axis. Considering the mechanical parts of micromanipulator system to be linear and of second order, the dynamic model of the system in presence of nonlinear hysteresis is given by (1). Mx + Dx + Kx = Tu − Fh (1) where the parameters x, K, D and M represent the x-axis displacement, stiffness, damping coefficient and equivalent mass of the XY micromanipulator respectively. T denotes the piezoelectric coefficient, U stands for the input voltage and Fh indicates the hysteretic effect in terms of force. Equation (2) is the state space representation of the second order Dahl model based entire manipulator system incorporating hysteretic force term [25]. V = AhVx + Bh u p x (2) Fh = ChV (3) where, up is a constant (set to 30), V = [q1 q2]T is the intermediate state vector and Ah = ⎡ 0 ⎢ −a ⎣ 2 ⎤ − sgn( x ) a1 ⎥⎦ Bh = 1 ⎡0⎤ ⎢1 ⎥ ⎣ ⎦ (4) (5) International Conference on Magnetics, Machines & Drives (AICERA-2014 iCMMD) Ch = [ b1 sgn( x )b0 ] (6) TABLE I: IDENTIFIED DYNAMIC MODEL PARAMETERS OF THE MICRO MANIPULATOR WITH DAHL HYSTERESIS Parameter Value Unit M 0.1828 kg D 2.5973 x 103 N s/m K 2.6065 x104 N/m T 0.0468 C/m a1 121.9874 - a2 1.1773 x 106 - b1 1.8485 x 106 - b0 0 - (a) (b) Fig. 2: a) System floor plan of the plant using Dahl Model, b) Dahl model for calculating the Hysteretic term Fh The identified Dahl model parameters for the XY micromanipulator system is given in Table I. LABVIEW implementation of the identified dynamic model with Dahl hysteresis is shown in Fig. 2(a) and Fig. 2(b). III. CONTROLLER DESIGN A properly designed controller is needed as a remedy for the nonlinear hysteresis in order to achieve a high performance tracking control. Once the trajectory to be tracked is decided, the controller design centers on the input voltage necessary to track the desired trajectory. A. Pure Feedforward Control (PFC) Feedforward control depicted in Fig. 4 is one of most fundamental control strategies which has been known to effectively perform required control actions in open loop. As an anticipative control structure, it guarantees a perfect control action provided the model dynamics are known with certainty. In this control algorithm, an inverse Dahl model is used in the feedforward path, Fig. 3. The controller efficacy depends upon the accuracy with which the hysteresis is modeled. To implement an open loop control scheme, the inverse Dahl model maps the compensated voltage corresponding to the desired position to be tracked. The output of the inverse Dahl model is fed as an input to the Dahl model in order to force the system to track the desired signal. The inverse Dahl model is directly implemented for online identification of hysteresis. This is essential as hysteresis if estimated off-line will not match the actuator nonlinearities and there exists a possibility of an error between the desired and the actual compensated outputs. B. Unadaptive Dithered Nonlinear Control Paradigm As explained earlier, dither inputs are high frequency noise signals which maximize the information content of an otherwise pure system or enhance its performance. Dither inputs have been used in control systems and signal processing applications to alleviate the effects of nonlinearity, hysteresis, quantization, gear backlash, etc. Studies have shown that dithering holds amazing capabilities when it comes to linearizing the effects of hysteretic nonlinearity in piezoelectric actuators [18-21]. Injection of a suitable dose of noise stimulates the manifestation of the popular phenomenon of SR. Since its emergence as an explanation for the periodic recurrence of Earth’s ice ages [26], it has traversed many disciplines ranging from electronic systems [27] to sensing neurons [28] and from bidirectional ring lasers [29] to super conducting quantum loops [30]. The three basic ingredients necessary for demonstration of SR are: a nonlinear system with a threshold, a sub-threshold periodic signal and noise. It has been shown in [31] that given these conditions, the system potential can be modeled as a symmetric/asymmetric bistable potential well and the system will oscillate between its two stable states with frequency equal to the frequency of periodic forcing causing a peak in Power Spectral Density. In context of piezoelectric actuator, the second order based Dahl model acts as the nonlinear system whereas the trajectory to be tracked (low frequency sinusoidal signal in this work) represents the periodic forcing. Noise is modeled by the externally added dither signal. The piezo potential operating inside the sample surface potential can be described by (7) which represents an unsymmetrical bistable potential. Δ6θ K 2 θ + x − (7) 2M ( x + Z ) 210( x + Z ) 7 where Δ and θ are parameters depending upon the material of piezo tip and sample on which piezo is operating and Z is the distance. In piezo, SR is manifested by a dip in tracking error or by a peak in tracking when a suitable dose of noise is injected with sinusoiadal periodic forcing. V ( x) = International Conference on Magnetics, Machines & Drives (AICERA-2014 iCMMD) amplitude A for the desired dither. The value of A given by (10) should be in the range of 1 to 10. If A goes past the range 1 to 10, then the effective dither amplitude will change by a factor of 10. This will result in a greater tracking error as the effective dither amplitude is not equal to the best dither amplitude. d = et − c (8) Fig. 3: Inverse Dahl Model for Compensated Voltage Calculation Fig. 4: Pure Feedforward Control Strategy C. Displacement Dither Based PID Adaptive Loop Control Precision tracking control of the two-axis nano positioning stage presents certain non-idealities like parametric uncertainties, external disturbances and the unmodeled dynamics including hysteresis modeling uncertainties and the effects of cross-coupling. In order to tackle all these roadblocks, an efficient adaptive controller is essential. In this section, an adaptive dither based control strategy is proposed. The schematic diagramic of this control is demonstrated in Fig. 5. In this control, a classical PID controller is utilized to tune the dither amplitude adaptively in accordance with a change in the tracking error. For successful implementation of this control strategy, a few pertinent issues like what is the criterion of reduction of nonlinearity? and what is a suitable dither amplitude?, need to addressed. The limiting condition for nonlinearity is taken as the minimum condition which if present can reduce the system tracking error below a prespecified value (assumed to be 10% of the tracking error obtained for undithered system in this case). Since the proposed adaptive control strategy exploits the dithering capabilities in displacement dither mode (dither is injected as displacement), the best displacement dither obtained for unadaptive displacement dithering has been used as the suitable dither amplitude in this scheme. The algorithm for adaptively varying the dither amplitude is described below. The tracking error et in this case is compared with a constant c, (its value being 10% of the tracking error obtained for unadaptively dithered system). This assumption is valid as it effectively aims at keeping the tracking error within a range of 10% of that obtained with an unadaptive dithered system. The difference d thus obtained is worked upon by a PID Controller to generate Ad. The PID controller output (Ad) is compared with a constant A1 to generate the adaptive ( ) Ad = K p d + K i ∫ ddt + K d d * K A = A1 − Ad (9) (10) where A1 is the initial best estimate of suitable dither amplitude and Ad is the compensated adaptively generated dither amplitude. The selection of control parameters is equally important in this case as well. The sine dither used has the same value as that found out for best displacement dither in unadaptive displacement dither control paradigm. A1 is selected such that ܣൌ ܣଵ െ ܣௗ is constrained between 1 to 10 for better adaptivity. Constant c is computed to be 37.3e (-10), A1= 6 and PID parameters of controller are P = 100, I = -0.1, D = 0. IV. RESULTS AND DISCUSSIONS The effectiveness of the proposed control strategies are tested rigorously using a sinusoidal input having amplitude 110 μm and frequency 1 Hz. The input covers the entire range of the workspace. Commencing with arbitrary dither amplitude, the optimum dither intensity in unadaptive displacement dithering mode is found out by RMS tracking error test. The dither amplitude which ensures the least RMS tracking error is established as the best dither. SR also manifests itself during the search for the best dither. When the dither amplitude is gradually changed, a resonance like behavior appears. The RMS tracking error attains a minima for a particular value of dither amplitude (10e (-11)). For dither amplitudes other than this optimum value, the system performance degrades. SR is evident in Fig. 6 where tracking error is plotted against varying dither amplitudes in displacement dithering mode. As evident from Fig. 7 and Table II, unadaptive displacement dithering mode achieves a reduction of hysteretic curve area by 15.788 % as compared to the undithered system. The best displacement dither found herein is used for further simulations in adaptive control paradigm. PID Adaptive Loop Control further enhances tracking performance with a reduced tracking error of 29.546 nm. The results of tracking error test with the proposed control paradigms are presented in Fig. 8. To ascertain the robustness and adaptive capabilities of the proposed controller, multi-amplitude, multi-frequency test is undertaken as well. The system is subjected to input amplitudes of 90 μm, 110 μm and 130 μm and frequency variation includes 0.25 Hz, 0.5 Hz and 1 Hz respectively. From the plots obtained for actual position versus desired position in Fig. 9, it is observed that the control action is robust and successfully mitigates the impact of sudden input variation. International Conference on Magnetics, Machines & Drives (AICERA-2014 iCMMD) Fig. 5: Pure Feedforward cum PID Adaptive Control Strategy Fig. 9: Input vs. Output plot for Multi-Frequency Multi-Amplitude Tracking. Fig. 6: Stochastic Resonance Plots for various systems. Fig. 10: Two Axis Tracking for x-y axes inputs differing by angle 90° for various systems. Fig. 7: Hysteresis plots TABLE II. SYSTEM PERFORMANCE WITH VARIOUS CONTROL STRATEGIES Type Control Fig. 8: Tracking Error Plots for Various Systems The two-dimensional motion tracking of the manipulator needs to be tested as well apart from the single axis tracking undertaken above. Contouring error is defined as the error between the actual position and desired position along an orthogonal direction to the trajectory. Contouring has been done for input signals having magnitudes of 110 µm and of RMS Error (in nm) % Error Reduction RMS Contouring Error (in nm) Undithered System 37.22 0 85.483 Unadaptive Best Displacement Dithered 31.42 15.788 79.319 PID Adaptive Scheme 29.546 20.617 70.964 frequencies 1 Hz along both x and y axes. Fig. 10 depicts the contour tracking performance of the PID Adaptive Loop controller with two axis inputs differing by a phase angle of 90ο. International Conference on Magnetics, Machines & Drives (AICERA-2014 iCMMD) V. CONCLUSION An adaptive displacement dither based control paradigm with good performance characteristics is designed for efficient dual-axis tracking of micro/nano positioning stage. The controller imparts 20.617 % effective hysteresis compensation as compared to the undithered system. The reduced tracking error of 29.546 nm validates the results. Additionally, the controller is shown to be robust in presence of sudden input variations. Multi-amplitude, multi-frequency trajectory was tracked with high accuracy by the PID Adaptive Loop controlled nanopositioning platform. The cross-coupling effects of the micro/nano manipulator are also mitigated considerably with a contour tracking error of only 70.964 nm obtained for the two axes inputs differing in phase by 90ο. The tracking performance improvement over both unadaptive and undithered systems is noteworthy, making this strategy suitable for real-time industrial applications. ACKNOWLEDGMENT The authors acknowledge the continuous support of Director, CSIR-CMERI for carrying out this research. REFERENCES [1] S. Gonda, T. Doi, T. Kurosawa, Y. Tanimura, N. Hisata, T. Yamagishi, H. Fujimoto and H. Yukawa, “Accurate topographic images using a measuring atomic force microscope,” Appl. Surf. Sci., vol. 144/145, pp. 505–509, 1999. [2] K. Kajiwara, M. Hayatu, S. Imaoka and T. Fujita, “Application of large scale active microvibration control system using piezoelectric actuators to semiconductor manufacturing equipment,” in Proc. SPIE, Bellingham, WA, 1997, vol. 3044, pp. 258–269. [3] J. Hesselbach, R. Ritter, R. Thoben, C. Reich and G. Pokar, “Visual control and calibration of parallel robots for micro assembly,” in Proc. SPIE, Boston, MA, Nov. 1998, vol. 3519, pp. 50–61. [4] A. Henke, M.A. K¨ummel and J. Wallaschek, “A piezoelectrically driven wire feeding system for high performance wedge wedge-bonding machines,” Mechatronics, vol. 9, pp. 757–767, 1999. [5] S. Aoshima, N. Yoshizawa and T. Yabuta, “Compact mass axis alignment device with piezo elements for optical fibers,” IEEE Photon. Technol. Lett., vol. 4, no. 5, pp. 462–464, May 1992. [6] Z. X- Long and T.Y- Hong, “Intelligent Modeling for Hysteresis Nonlinearity in Piezoceramic Actuator, ” Journal of System Simulation, vol. 18, no. 1, Jan. 2006. [7] F-J. Lin, H-J. Shieh, P-K. Huang and L-T. Teng.“Adaptive Control with Hysteresis Estimation and Compensation Using RFNN for PiezoActuator,” IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, vol. 53, no. 9, September 2006. [8] K. Kuhnen and H. Janocha, “Complex hysteresis modeling of a broadcclass of hysteretic nonlinearities,” in Proc. 8th Int. Conf. New Actuators, Bremen, Germany, Jun. 2002, pp. 688–691. [9] Y. Stepanenko and C.Y. Su, “Intelligent control of piezoelectric actuators,” in Proc. 37th IEEE Conf. Decision Control, 1998, vol. 4, pp. 4234–4239. [10] G. Ping and J. Musa, “Generalized Preisach model for hysteresis nonlinearityof piezoceramic actuators,” Precision Eng., vol. 20, pp. 99–111, 1997. [11] H. Tang and Y. Li, “Design, Analysis and Test of a Novel 2-DOF Nanopositioning System Driven by Dual-Mode, ” IEEE Transactions on Robotics, February 2013. [12] A. I. Cahyadi and Y. Yamamoto, “Modelling a Micro Manipulation System With Flexure Hinge,” Proceedings of the IEEE International Conference on Robotics, Automation and Mechatronics, 2006, pp. 1–5. [13] S. Bashash and N. Jalili, “Intelligent rules of hysteresis in feedforwardtrajectory control of piezoelectrically-driven nanostagers,” J. Micromech.Microeng., vol. 17, pp. 342–349, 2007. [14] K. Furutani, M. Urushibata and N. Mohri, “Displacement control ofpiezoelectric element by feedback of induced charge,” Nanotechnology, vol. 9, pp. 93–98, 1998. [15] R. Changhai and S. Lining, “Improving positioning accuracy of piezoelectricactuators by feedforward hysteresis compensation based on a new mathematical model,” Rev. Sci. Instrum., vol. 76, pp. 095111-1–095111-8, 2005. [16] S. Lining, “Tracking control of piezoelectric actuator based on a newmathematical model,” J. Micromech. Microeng., vol. 14, pp. 1439–1444, 2004. [17] S. Bashash and N. Jalili, “Robust Adaptive Control of Coupled Parallel Piezo Flexural Nanopositioning Stages,” IEEE Trans. on Mechatronics, vol. 14, no. 1, pp. 11-20, 2009. [18] S.K. Shome, M. Prakash, A. Mukherjee and U. Datta, “Dither Control for Dahl Model Based Hysteresis Compensation,” IEEE International Conference on Signal Processing, Computing and Control”, 2013, pp. 1-6. [19] S. Pradhan, S. K. Shome, M. Prakash and M. K. Patel, “Performance Evaluation of Dither Distributions of Piezo Electric Actuators for NanoPositioning,” IEEE International Conference on Control, Automation, Robotics and Embedded System, 2013, pp. 1-6. [20] M. Prakash, S. K. Shome, S. Pradhan and M. K. Patel “A Comparison of Dithers for Hysteresis Alleviation in Second Order Dahl Model Based Piezoelectric Actuator,” IEEE International Conference on Control, Automation, Robotics and Embedded System, 2013, pp. 1-6. [21] S.K. Shome, S. Pradhan, A. Mukherjee and U. Datta, “Dither Based Precise Position Control of Piezo Actuated Micro-Nano Manipulator,” 39th Annual Conference of the IEEE Industrial Electronics Society, Austria, 2013, pp. 3486-3491. [22] S. Bashash and N. Jalili, “Robust multiple-frequency trajectory trackingcontrol of piezoelectrically-driven micro/nano-positioning systems,” IEEE Trans. Control Syst. Technol., vol. 15, no. 5, pp. 867–878, Sep. 2007. [23] C.L. Hwang, Y.M. Chen and C. Jan, “Trajectory tracking of large displacementpiezoelectric actuators using a nonlinear observer-based variable structure control,” IEEE Trans. Control Syst. Technol., vol. 13, no. 1, pp. 56–66, Jan. 2005. [24] J.J. Slotine and S.S. Sastry, “Tracking control of nonlinear systems usingsliding surface with application to robot manipulators,” Int. J. Control, vol. 38, pp. 465–492, 1983. [25] Q. Xu and Y. Li, “Dahl Model-Based Hysteresis Compensation and PrecisePositioning Control of an XY Parallel Micromanipulator With Piezoelectric Actuation,” Journal of Dynamic System, Measurement and Control, ASME, pp. 041011-1-041011-12, 2010. [26] R. Benzi, G. Parisi, A. Sutera and A. Vulpiani, “Stochastic resonance in climatic change,” Tellus, 1982. [27] V.I. Malnikov, “Schmitt trigger: a solvable model of stochastic resonance,” Phys. Rev. E, vol. 48, no. 4, pp. 2481–2489, 1993. [28] J.K. Douglas, L. Wilkens, E. Pantazelou and F. Moss, “Noise enhancement of information transfer in crayfish mechanoreceptors by stochastic resonance,” Nature, vol. 365, pp.337–339, 1993. [29] B. McNamara, K. Wiesenfeld, R. Roy, “Observation of stochasticresonance in a ring laser,” Phys. Rev. Lett., vol. 60, pp. 2626–2629, 1988. [30] K. Wiesenfeld and F. Moss, “Stochastic resonance and the benefits ofnoise: from ice ages to crayfish and SQUIDs,” Nature, vol. 373, pp. 33–36, 1995. [31] L. Gammaitoni, P. Hanggi, P. Jung and F. Marchesoni, “Stochastic Resonance,” Review of Modern Physics, vol. 70, no. 1, 1998.